Especificaciones - fasol.es · Le recordamos que tanto con Spectum ... Si el helicóptero no se...
22
GT5 Sistema flybarless 3 ejes Introducción El GT5 es un giróscopo estabilizador eléctrico de 3 ejes de gran rendimiento, diseñado para volar helicópteros flybarless. El GT5 puede ser usado por una gran variedad de receptores del mercado. Si usa Spectrum simplemente puede usar los satélites sin la necesidad adicional de un receptor. Le recordamos que tanto con Spectum como sin él le garantizamos el rango completo de funcionabilidad si lo usa solamente con los satélites. Debido a la gran cantidad de fabricantes de electrónica del mercado no le podemos dar garantía por fallos o daños ocasionados por el GT5 si no hay un malfuncionamiento detectado del GT5. El GT5 no ha sido testado en helicópteros propulsados con turbina. Por esta razón no le podemos dar autorizar para usar el GT5 con turbinas. Si aún así quiere usarlo con turbinas, queda totalmente bajo su riesgo. Le recordamos que el GT5 está hecho para usar en helicópteros de RC y por esta razón no es un juguete. Volar un helicóptero ha de ser siempre en un lugar adecuado, con unas precauciones de seguridad correctas para no causar daños a nadie. Cualquier responsabilidad relacionada con las notas anteriores es rechazada por parte del fabricante, de Thunder Tiger, del importador y del vendedor. Características - Sistema eléctrico de estabilización de 3 ejes muy preciso - Pantalla OLED con icono basada en la interfaz del usuario - Ratón táctil para un fácil manejo sin la necesidad de añadir más hardware - Soporta receptores PPM normales, Spektrum & receptores satélite JR, Futaba S-Bus y muchos más… - Apto para servos Futaba y JR y conectores RC - Tamaño compacto y ligero - Caja de aluminio de alta calidad para una mayor disipación del calor
Transcript of Especificaciones - fasol.es · Le recordamos que tanto con Spectum ... Si el helicóptero no se...

GT5
Sistema flybarless 3 ejes
Introducción
El GT5 es un giróscopo estabilizador eléctrico de 3 ejes de gran rendimiento, diseñado para volar
helicópteros flybarless.
El GT5 puede ser usado por una gran variedad de receptores del mercado. Si usa Spectrum simplemente
puede usar los satélites sin la necesidad adicional de un receptor. Le recordamos que tanto con Spectum
como sin él le garantizamos el rango completo de funcionabilidad si lo usa solamente con los satélites.
Debido a la gran cantidad de fabricantes de electrónica del mercado no le podemos dar garantía por
fallos o daños ocasionados por el GT5 si no hay un malfuncionamiento detectado del GT5.
El GT5 no ha sido testado en helicópteros propulsados con turbina. Por esta razón no le podemos dar
autorizar para usar el GT5 con turbinas. Si aún así quiere usarlo con turbinas, queda totalmente bajo su
riesgo.
Le recordamos que el GT5 está hecho para usar en helicópteros de RC y por esta razón no es un juguete.
Volar un helicóptero ha de ser siempre en un lugar adecuado, con unas precauciones de seguridad
correctas para no causar daños a nadie.
Cualquier responsabilidad relacionada con las notas anteriores es rechazada por parte del fabricante, de
Thunder Tiger, del importador y del vendedor.
Características
- Sistema eléctrico de estabilización de 3 ejes muy preciso
- Pantalla OLED con icono basada en la interfaz del usuario
- Ratón táctil para un fácil manejo sin la necesidad de añadir más hardware
- Soporta receptores PPM normales, Spektrum & receptores satélite JR, Futaba S-Bus y muchos
más…
- Apto para servos Futaba y JR y conectores RC
- Tamaño compacto y ligero
- Caja de aluminio de alta calidad para una mayor disipación del calor

Especificaciones
Pantalla 96x64 píxeles OLED
Entrada Ratón táctil
CPU Procesador de alta velocidad de 32 bits
Sensor velocidad MEMS mir +- 500º/sek para ejes X-Y-Z
Impulso cola 1500µS/700 µS
Frecuencia cola 50Hz – 333Hz
Frecuencia Plato cíclico 50Hz – 200Hz
Tipos Plato cíclico 90º, 120º, 135º (140º)
Dimensiones 29.5 x 32 x 16mm
Peso 15g
Incluido en el paquete
Nota: el ratón táctil es muy durable
Conectores
Conectando con el receptor / Satélites
El receptor Spektrum Satellite puede ser fácilmente conectado al GT5 mediante una fácil instalación,
donde el GT5 actúa como unidad principal donde usted solo debe conectar los servos (por favor, lea la
nota de seguridad para usar el GT5 sin receptor externo). También puede usar el GT5 con Futaba S-bus.
En este caso solo debe conectar el cable del S-bus al canal 6 ch6 del GT5. Como la tecnología con el S-

bus y satélites cambia todo el tiempo no podemos asegurar con garantías una compatibilidad del 100%.
Por esta razón, el manejo será totalmente bajo su riesgo y responsabilidad.
Spektrum / JR Satellite receiver o Futaba S-Bus
! Para evitar daños en los servos, el GT5 debe ser conectado a la batería del receptor antes de conectar
los servos y hacer la programación de servos (paso 4). Si tiene un helicopetro helectrico, también debe
configurar el variador ESC/BEC y ajustar correctamente antes de que conecte con el GT5.
Si usted usa el GT5 o el S-Bus en un helicóptero eléctrico y tiene un variador con BEC integrado, no es
obligatorio usar una batería externa del receptor. Con algunos BEC el voltaje durante un vuelo intenso
puede fallar. Le recomendamos poner atención al manual del fabricante. Si no está seguro de que hacer
siempre puede usar una batería externa si se siente más confiado. El voltaje de la batería externa debe
ser igual que el voltaje de la alimentación del BEC.
Ajustes importantes para la emisora:
Toda la mezcla del plato cíclico se realiza a través del GT5. En su emisora debe escoger el tipo de plato
cíclico mecánico o bien un servo para cada función. Por lo cual NO DEBE escoger en su emisora un plato
cíclico tipo 120º o 140º. También todos los recorridos del servo (ATV) deben ser ajustados a -100 y +100

(configuración estándar por todas las emisoras). Los puntos centro del servo deben estar a 0 y no deben
estar trimmados en la emisora. La curva de inclinación debe ajustarse entre -100 y +100. Una vez
finalizada la configuración del GT5 ya puede ajustar distintas curvas de inclinación en su emisora.
Ganancia total del plato cíclico y de la cola:
Esta función es para elevaciones rápidas y reducir la ganancia del gyro en el plato cíclico y la cola.
Mientras vuele debe haber, idealmente, una ganancia otorgada del 100%. Si ha ajustado más ganancia
no importa si el helicóptero se inclina hacia arriba en el plato cíclico o cola. Puede presionar el
interruptor para acceder a la ganancia pre configurada (ej. 60%). Ahora el balanceo de todos los ejes
debe detenerse y el helicóptero puede ser aterrizado de manera segura. Después puede reducir la
ganancia en los ajustes. Por esta razón le recomendamos empezar subiendo con una ganancia baja y
conectar al 100% cuando el helicóptero tenga una altitud segura, si está volando con una nueva
configuración o bien ha cambiado la ganancia. Si el helicóptero no se eleva es que la ganancia no es
demasiado alta.
Si el GT5 funciona correctamente, puedes comprobar la funcionalidad de los sensores en el grafico de
barras de la pantalla.
Si mueve el helicóptero manualmente en sus 3 ejes, el tubo conectado debe moverse hacia arriba y
hacia abajo.
Si el tubo no resta en la posición central después de acabar el test no es un malfuncionamiento.
Si mueve los sticks de su emisora, los tubos también deben moverse.
Sino debe comprobar su receptor para recibir los fallos.
Ajustes
El GT5 debe ser fijado perpendicularmente en la placa del giróscopo de su helicóptero.
Primeros ajustes
1. Iniciar el aparato

Una vez el sistema ha sido iniciado, aparecerá un cursor en la parte izquierda dependiendo donde usted
toque la parte reactiva de la caja del GT5.
2. Manejo general
Si mueve el cursor hacia arriba hasta el logo ACE-RC y lo mantiene durante 3 segundos va a acceder al
menú principal del GT5. Puede escoger la entrada de menú golpeando dos veces. Puede salir del menú
entrada con un golpecito en el símbolo “exit” o bien el icono que muestra una flecha apuntando hacia
arriba.
3. Escoger entre helicóptero Nitro o Helicóptero
En el menú del plato cíclico (que reconocerá a través de del icono del plato cíclico en la parte izquierda)
debe primero escoger el tipo de helicóptero (nitro o eléctrico).
Ej:
Mantenga el Logo Ace 3 segundos
Seleccione el menú del plato cíclico (con el dedo arrastre hacia arriba o hacia abajo)
Doble golpe en el icono del plato cíclico
Escoja el icono – Heli y texto,, tipo”
Doble golpe
Escoja nitro o eléctrico (con el dedo arrastre hacia arriba o hacia abajo)
Doble golpe para aceptar
4. Ajuste del plato cíclico
Aquí tiene que escoger el tipo de plato cíclico que necesita su helicóptero. Encontrará más trucos que
encontrará al final del manual.
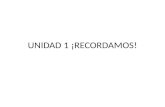
5. Ajuste de la frecuencia del servo
Ajuste la frecuencia de servo y velocidad. Por favor compruebe los valores máximos que pueden ser
usados por los servos. No use un servo preparado, por ejemplo, para 166Hz con una frecuencia mayor,
ya que podría dañarlo.
Impulso central de la cola del servo
Para la mayoría de servos de cola el estándar es de 1500µ (para 1520 también es 1500). Para servos de
banda estrecha puede escoger 760. Fíjese en el manual del servo.
Velocidad del servo:
Para los servos de cola y del plato cíclico se puede ajustar el rendimiento de manera separada. Si no
sabe que escoger, seleccione 0.70.
Si escoje valores demasiado altos puede dañar los servos. Algunos fabricantes muestran la velocidad de
servo a 60º, por favor calcule un 45º.
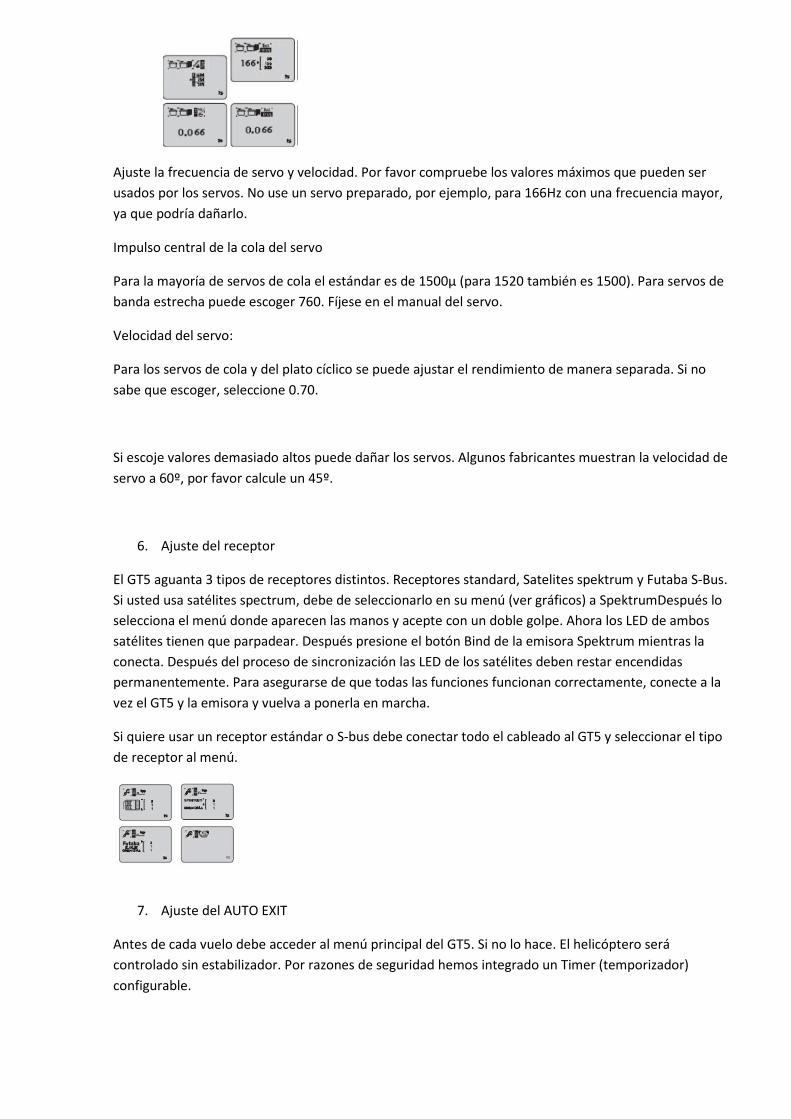
6. Ajuste del receptor
El GT5 aguanta 3 tipos de receptores distintos. Receptores standard, Satelites spektrum y Futaba S-Bus.
Si usted usa satélites spectrum, debe de seleccionarlo en su menú (ver gráficos) a SpektrumDespués lo
selecciona el menú donde aparecen las manos y acepte con un doble golpe. Ahora los LED de ambos
satélites tienen que parpadear. Después presione el botón Bind de la emisora Spektrum mientras la
conecta. Después del proceso de sincronización las LED de los satélites deben restar encendidas
permanentemente. Para asegurarse de que todas las funciones funcionan correctamente, conecte a la
vez el GT5 y la emisora y vuelva a ponerla en marcha.
Si quiere usar un receptor estándar o S-bus debe conectar todo el cableado al GT5 y seleccionar el tipo
de receptor al menú.
7. Ajuste del AUTO EXIT
Antes de cada vuelo debe acceder al menú principal del GT5. Si no lo hace. El helicóptero será
controlado sin estabilizador. Por razones de seguridad hemos integrado un Timer (temporizador)
configurable.

Después de un cierto tiempo (a escoger entre 3 y 250 segundos) el GT5 automáticamente retrocederá
hasta el menú principal si usted no lo usa.
Pensamos que un valor de 25 segundos es suficiente para la mayoría de pilotos, ya que normalmente
entre dejar el helicóptero y arrancar el motor pasan unos 25 segundos.
8. Ajuste plato cíclico en las direcciones del servo
Aquí tiene que ajustar la dirección de los tres servos de manera que todos vayan a la misma dirección
mientras da la inclinación positiva o negativa. Si da la inclinación en control positivo, el plato cíclico debe
ir tanto como hacia arriba como hacia abajo. Si un servo va en dirección equivocada debe revetirlo con
la función reverse del menú (rev). La correcta dirección del control de la inclinación, alerón y elevador se
ajustará más tarde en la emisora usando la función servo reverse.
9. Ajuste ganancia de la dirección en los controles del plato cíclico
Si la nariz del helicóptero es empujada hacia abajo, el plato cíclico debe moverse en otra
dirección y restar horizontal. Si el helicóptero va hacia la izquierda el plato cíclico debe moverse
automáticamente hacia la derecha y restar horizontal. Si esto no ocurre la dirección de la
ganancia de la función relativa a lo que va mal debe ser revertida en este menú.
Si la dirección del sensor del alerón va en una dirección incorrecta debe revertir la función del
sensor “Ail” del menú. Si la dirección del sensor del elevador va en una dirección incorrecta
debe revertir la función del sensor “Elv” del menú.
10. Ajuste ganancia de la dirección del control de cola
Si la cola del helicóptero es empujada hacia la derecha, el rotor de cola debe ser controlado
hacia la derecha por el GT5 (de manera que el rotor de cola hará ir hacia la derecha para ajustar
otra vez la cola hacia la izquierda) Nunca intente esto con las palas funcionando, ya que podría
autolesionarse de manera muy grave.
11. Ajuste corrección piruetas
En el menú del sensor puede escoger la corrección de piruetas “Pir”. Si entra con un doble
golpe el modo test se activará. Ahora el plato cíclico del helicóptero será empujado en una sola
dirección. Si ahora gira el helicóptero en círculo, el plato cíclico debe permanecer en una

dirección. Si el plato cíclico cambia la dirección mientras mueve la cola, la corrección de las
piruetas debe ser revertida subiendo y bajando en el scroll con el dedo. Por razones de
seguridad, entre una vez más en este menú y repita el test.
Si usted detecta que las piruetas cambian de localización significa que el valor de este ajuste no
es perfecto. Por favor, cambie el valor e inténtelo otra vez hasta que las piruetas se realicen sin
desplazamientos de lugar.
12. Ajuste del punto central del servo
Si usted tiene una inclinación 0º los horns del servo deben ir verticales. (creando un ángulo de
90º a los rodamientos). Si no tiene un 0º de inclinación con los horns de los servos centrados
deberá cambiar los rodamientos del cabezal del rotor.
El servo de cola también debe tener un ángulo del 90º desde el horn hasta los rodamientos.
Estos ajustes no deben ser realizados en la emisora sinó en el GT5.
13. Stick de la cola dinámico
El stick dinámico tiene influencia en la velocidad de reacción entre el control otorgado hasta la
reacción de la cola. Para reacciones extremas (vuelos 3D) el valor debe ser ajustado a 50. Los
pilotos a escala pueden tener una cola más suave si ajusta el valor a 25. El valor adecuado debe
ser ajustado según las preferencias de cada piloto.
14. Recorrido del servo – recorrido completo
Primero debe ajustar el valor de los tres servos de manera que el plato cíclico no se sincronice
mecánicamente mientras maneja los controles. Con este ajuste de recorridotodos los
controladores se verán reducidos (elevador, alerón, inclinación) . Puede reducir la inclinación en
un menú plato cíclico extra. Al final del manual encontrará más información de este tema.
15. Limito del servo en el plato cíclico
Normalmente no es necesario cambiar estos valores. Pero si el plato cíclico se sincroniza
mientras usa los controladores de alabeo o profundidad (alerón / elevador), aunque en el menú
de recorrido de los servos 1, 2 y 3 estén ajustados a su mínimo, aquí puede reducir el recorrido
hasta que no haya sincronización (compruébelo en el menú principal con las barras al 100% de
ganancia). Este recorrido de la inclinación no se va a ver afectado con este ajuste.

16. Recorrido del pitch (inclinación) & agilidad
En el menú plato cíclico puede encontrar la mezcla “pit”, aquí puede ajustar el recorrido máximo
de la inclinación. Debe de tener una curva de inclinación ajustada de -100 a +100 en su emisora.
Ahora otorgue inclinación total al colectivo y compruebe el ángulo con un medidor. Ahora pone
este valor en el GT5. La inclinación puede ser ajustada más tarde de acuerdo con los puntos de
su emisora.
Por los valores del alerón y del elevador no debe ajustar ni el recorrido mínimo ni el máximo,
solamente la agilidad máxima. Para empezar bien escoja el 100. Al final del manual encontrará
más información de este tema.
17. Limitación del servo en el rotor de cola -> ¡MUY IMPORTANTE!
Este ajuste es muy importante proteger el servo del control de cola de daños. Después de
seleccionar este menú usted puede ajustar el recorrido de las ambas direcciones del servo.
Antes de conectar el servo por primera vez por favor retire el horn del servo para evitar una
sincronización mecánica a causa de demasiado recorrido. Por favor active con un doble clic el
límite del rotor de cola (A) y ponga el control de cola al máximo en una dirección. Si usted
cambia ahora el valor debe observar como que el servo cambia su punto final del recorrido. Si
no observa nada intente pulsando al máximo el control hacia la otra dirección. Después de esto,
ajuste el punto final del recorrido del servo para (B). Si reduce el valor va a reducir el punto final,
con valores mayores incrementará el punto final. Cuando haya finalizado el ajuste el servo no
debe sincronizarse mecánicamente, sea cual sea la dirección del control de cola.
AJUSTES
Submenú para ajustes P/I. Ajuste plato cíclico:
P P es para una parada rápida del plato cíclico. Valores altos responden con este comportamiento. Valores demasiado altos conllevan balanceos
I Lleva a hacer rolls y flips de manera constante. Por favor
primero empiece con valores bajos (30%), e vaya incrementando hasta obtener ratios constantes de roll/flip.
I-D stick Este valor debe mantenerse a 100 para que sea perfecto para maniobras con recorrido. En la categoría del plato cíclico encontrará más información de este tema.

D-sense Tiene influencia directa en el comportamiento de parada del plato cíclico. Si el helicóptero está recortando un poco después de detenerlo por encima del elevador usted debe al principio incrementar este parámetro. Por favor incremente este valor en intervalos de 5 y testee su comportamiento de parada después. Más adelante encontrará más trucos para optimizar los ajustes del plato cíclico
Free forward La direccionalidad para la reacción del helicóptero mediante
los controles del stick. Los pilotos de 3D deben escoger valores de entre 80 hasta 95. Si el valor es demasiado alto, el helicóptero acabará zigzagueando después de detenerse por encima del elevador.
I-Iim Si el helicóptero no se mantiene en una dirección/altitud durante el vuelo hacia delante y parece que vuele una línea ondulada puede incrementar el l-Lim hasta que el heli vuele recto hacia delante. Normalmente no deberá cambiar este valor.
Hovering Controla como de estable es el helicóptero controlado por el
GT5 durante el vuelo suspendido
ID Stick e I-Sens actúan sobre la influencia directa en el comportamiento de parada. Dependiendo de su
estilo personal puede ajustar estos valores a su gusto. Normalmente no deberá cambiar nada.
Dependiendo del tamaño, peso y cabezal de rotor del helicóptero es posible de que note un efecto de
desvío después de una parada rápida brusca por encima del elevador. Este efecto es evitable si
encuentra el ajuste perfecto de los dos valores.
Si usted usa satélites Spektrum el Canal 7 se usa para una ganancia total. Si usa receptor externo la
aguja central del conector term del GT5 es usada por la ganancia total (aguja central del cable 3 en 1).
Menu P/I ajustes
Submenú para ajustes P/I. Ajustes rotor de cola:
P Valor elevado – parada rápida a la cola y más estable
cuando realiza maniobras bruscas. Si el valor es demasiado alto la cola empezará a balancearse. Si es demasiado bajo empezará a ser inestable.
I Se usa para piruetas constantes. Empiece por un 30% e
incremente el valor hasta que las piruetas sean constantes durante el recorrido de las figuras. Valor bajo: piruetas no constantes, valor alto: balanceo de cola lento.
D-Sense Si la cola no se detiene lo suficientemente rápido se
puede optimizar desde aquí. Normalmente este valor no debe ser modificado.
Tail-D-DB Si la cola se balancea durante el hovering puede eliminar
este efecto aquí (deadband) pero solamente si no hay otro valor mal ajustado o un problema mecánico con la cola. Valor pequeño – deadband (ancho muerto) pequeño
Tail – symmetric Si usted detiene la cola y ve que se detiene bruscamente
en una dirección pero lento en la otra puede optimizarlo

desde aquí. Por favor ajuste el valor hasta que tenga el mismo comportamiento en ambos lados. Normalmente el resultado será que el comportamiento de parada de un lado irá mejor y la otra parecerá que no tan bien. Ahora puede intentar cambiando P y/o D-Sense para reducir/remover el rebote posterior. Si lo desea puede intentar la función de parada suave si no alcanza un resultado satisfactorio. Normalmente no hay necesidad de cambiar estos valores.
Tail stick dinamic
Este valor controla la reacción de velocidad desde la entrada del piloto hasta la cola.
DMA – cíclico Estas dos funciones trabajan perfectamente si se ajustan
juntas. Si la cola se mueve hacia los lados durante las inclinaciones, la inclinación DMA puede incrementarse hasta que la cola esté en la misma posición. Si usted debe ajustar + o – depende del heli o del servo.
DMA pitch Puede controlarlo antes del vuelo dando inclinación o más cíclico cuando esta función está activada. Ahora la cola debe controlar versus el torque. El valor del cíclico DMA es normalmente de 1/3 menos que la inclinación DMA (ej DMA inclinación 30; DMA cíclico 20).
Parada suave Puede ser incluso para una parada de comportamiento
brusco. Normalmente no debe cambiar este valor. Bajo ciertas circunstancias puede sobre cargar el servo.
¡Tóme nota!
Si tiene un helicóptero eléctrico asegúrese de que el motor no puede poner en marcha y producir daños
a usted, al helicóptero o al entorno.
Para evitar esto usted puede:
- Desconectar los cables que conectan el motor con el ESC variador
- Conectar el GT5 a una batería externa sin conectarlo a la batería de vuelo
- Retire el piñón del engranaje principal de manera que en caso de ponerse en marcha el motor el
piñón no tocaría el engranaje de la corona
Truco: algunos variadores ESC con BEC interno pueden funcionar en el GT5 de manera que no necesita
de una batería externa. Normalmente esto no es problema para el GT5 siempre que el voltaje de la
alimentación del GT5 se mantenga estable. Pensamos que esto es un gran riesgo ya que si el voltaje
disminuye en cualquier caso no podrá controlar el helicóptero. Si usa una batería externa para el GT5
será alimentada con el voltaje y al menos usted podrá auto rotar el helicóptero en caso de emergencia.
Si quiere usar una batería adicional será bajo su elección y debe ser escogida según el manual del ESC y
su propia decisión de tener esta seguridad adicional o no.
TRUCOS PARA AJUSTAR EL PLATO CÍCLICO
Ajustes básicos para la inclinación (colectivo):

Para empezar los ajustes de la inclinación (pitch) del GT5 debe estar seguro de que tiene la curva de
la inclinación ajustada entre -100 hasta +100 en su emisora. Con esto usted puede ajustar la
inclinación máxima e mínima en el menú del plato cíclico del GT5 y controlarlo mediante un
medidor de inclinación. La inclinación depende del tamaño, peso y potencia del helicóptero. Si no
está muy seguro, empiece con unos +/-10-11º.
Si ajusta por ejemplo una inclinación máxima de inclinación de +/- 12º, más tarde podrá ajustar
distintas fases de vuelo donde podrá reducir la inclinación, reduciendo la curva de inclinación en
esta fase. Esto se hace normalmente para despegar/aterrizar donde usted debe tener una
inclinación mínima de -3/4ºpara no empujar al helicóptero demasiado hacia el suelo mientras le da
una inclinación negativa.
Ajustes básicos para el alerón y la inclinación (cíclico):
Si usted siempre tiene los controles del cíclico al máximo el plato cíclico nunca sincronizará
manualmente. Esta es la única norma básica que debe seguir para no dañar nada. Como de ágil va a
buscar su helicóptero depende de su estilo de vuelo y de los ajustes de la emisora.
Primero puede dejar el valor para el alerón y elevador en 100 en el menú del plato cíclico. Pruebe el
helicóptero y testee se le es suficientemente ágil. Si el heli es demasiado rápido o lento por encima
del eje lo puede ajustar cambiando el recorrido del servo en la emisora y el correspondiente canal
del alerón o del elevador. Los valores altos en la emisora lo llevarán a tener más agilidad. Si usted
alcanza el máximo valor en su emisora puede incrementar el valor del alerón o elevador en el GT5
ajustando más de 100.
Algunos pilotos miden la agilidad del cíclico usando un medidor de inclinación. Fíjese que para
realizar esto la inclinación del colectivo debe de estar a 0º. Ahora otorgue control al cíclico y mida la
inclinación. Para punto de inicio debe estar a unos 6º. Esto solamente es una advertencia y
normalmente no necesita medirlo nunca de esta manera.
Type → Aquí puede seleccionar si e GT5 se usará con un heli Nitro o eléctrico
Pitch → Aquí puede ajustar la inclinación máxima i mínima, mientras tiene una curva de inclinación
desde -100 hasta +100 en su emisora. Testee el ángulo máximo alcanzado con un medidor de
inclinación.
Alerón → Alerón = agilidad del eje del alerón. Al principio déjelo a 100. Solo en el caso que necesite
más agilidad y haya alcanzado el máximo en la emisora, ajústelo aquí.

Elevador → agilidad por el eje del elevador. Déjelo a 100. Si quiere cambiarlo siga las instrucciones
de los ajustes del alerón.
Usted puede imaginar la agilidad de su alerón y elevador como el ratio de las piruetas de la cola. Si
incrementa el recorrido del servo en su emisora la velocidad de las piruetas del alerón o elevador
también se incrementarán. Si el helicóptero está en el suelo no verá ningún tipo de cambios aún
cambiando los valores. Solamente lo notará cuando esté volando.
Si está ajustando la inclinación máxima y no tiene 0º mientras el stick está centrado, por favor ajuste
los varillajes del cabezal del rotor y no lo trime en la emisora.
Menú del Servo
Le recomendamos que siempre use la talla perfecta de los horns del servo. En el mejor de los casos,
el recorrido será del 100%. Si no es posible, puede ajustar los recorridos en el GT5.
Servo-center
El servo horn de la cola del servo debe de estar a un ángulo d 90º al varillaje de cola.
Inténtelo alcanzar mecánicamente y solamente haga el ajuste del trim en el GT5.
El plato cíclico debe estar tan horizontal como sea posible. Por favor ajústelo manualmente tan bien
como pueda y luego ajuste los 3 servos perfectamente en el menú. Puede conseguir unos ajustes
perfectos si usted hace “flotar” el heli y observe en qué dirección deriva mientras está suspendido al
aire. Ahora ajuste los servos dependientes hasta que el heli reste en un punto. Este procedimiento
no es necesario, solamente es para optimizar.
Servo-reverse (recorrido reverse del servo)
Aquí puede ajustar la dirección de los servos. Ajústelos todos hasta que vayan a la misma dirección
si está controlando la inclinación.

La correcta dirección de las funciones del alerón y elevador puede ser ajustada más tarde en la
emisora. Solamente debe cambiar la dirección de la función en el canal. Si la inclinación y alerón van
en la dirección correcta pero el elevador va al revés, debe cambiar la dirección del servo elevador en
su emisora.
Servo – Recorrido – Recorrido máximo
Por favor ajuste los valores igual de manera que el plato cíclico no atasque (compruebe con
cíclico completo y controles del colectivo). Ya que este ajuste tiene influencia en todas las
funciones, la inclinación también tendrá que ser reducida. Pero esto puede ser ajustado a
parte en el menú del plato cíclico. Solamente en el caso de que no haya suficiente espacio
para la inclinación deberá usar el menú “limite del servo”.
Limite – Servo
Ajuste el recorrido máximo de ambas direcciones del rotor de cola. No deben rozarse!
Estos ajustes solamente son necesarios si su helicóptero tiene los ajustes del recorrido del servo
perfectamente realizados (el plato cíclico no roza con los controles) pero no alcanza la inclinación
máxima en el menú del plato cíclico.
En este caso puede incrementar el recorrido máximo y reducir los recorridos del alerón y elevador
en el límite del servo por no sincronizarse en los controles totales (la función del servo limite no
tiene influencia en la inclinación, pero la función del recorrido del servo lo reduce).
Normalmente solamente debe usar la función de recorrido del servo, ya que debe conseguir
suficiente inclinación con el 99% de helicópteros.
Atención: Todos los parámetros del siguiente ajuste del servo deben encajar con las especificaciones
técnicas de los servos. Si tiene valores superiores en el GT5 los servos pueden resultar dañados.
Ajuste del servo

Tail type – Tipo de cola : Ajuste del impulso central del servo de cola. El estándar es de 1500us
(también 1520ys). Banda estrecha: servos pueden ser ajustados a 760. Este valor debe de ser
consultado en el manual del servo.
Tail servo speed – Velocidad servo cola: La velocidad del servo se ajusta a 45º. Fíjese en que
voltaje usa el servo. Cuanto más alto sea el voltaje más rápido trabajará el servo. Fíjese en el manual
del servo para un ajuste perfecto. Algunos fabricantes solamente ajustan la velocidad para 60º. En
este caso usted debe calcular la velocidad para 45º.
Ej: velocidad para 60º= 0.08seg
0.08/60=0.0013 45=0.06 para 45º
Ajuste su GT5 a 0.060
Tail servo frequency – Frecuencia servo de cola: Ajuste aquí la frecuencia del servo de cola. La
mayoría de servos digitales para helicópteros 500, 50 y 90 pueden ser usados por un mínimo de
166Hz. Si no está seguro coja esta referencia como punto de inicio (a su propio riesgo). Servos
analógicos y tiny (pequeños). 3D son solamente disponibles para servos de cola de alto rendimiento.
Guíese según el manual del servo para unos buenos ajustes.
Swash plate type – Tipo plato cíclico Ajuste aquí el tipo de plato cíclico. Los helicópteros de
140º deben ser ajustados a 135º. Para una mezcla mecánica igual a la de un Raptor 50 o 90SE debe
ajustarlo a 90º.
Swashplate servo speed – Velocidad servo plato cíclico Guíese por la explicación anterior.
Use el mismo procedimiento para los servos del plato cíclico.
Swashplate frecuency – Frecuencia plato cíclico Ajuste de la frecuencia de los servo del plato
cíclico. La mayoría de los servos digitales pueden ser usados con 166Hz. Guíese por el manual. Los
servos del plato cíclico pueden ser usados hasta 200Hz. A más frecuencia, mejor rendimiento
obtenido.

Menú Sensor
Si quiere comprobar las direcciones del sensor debe estar en el menú principal del GT5 (con
bars). Es obligatorio comprobar el elevador, el alerón y los servos de cola!
Comprobación del sensor del elevador
Si empuja el helicóptero con la punta delantera hacia abajo el plato cíclico intenta estar horizontal.
Si esto no ocurre o el plato cíclico se mueve en otra dirección vaya al menú Elv del sensor e invierta
la dirección. ¿Luego vuelva a comprobar el sensor!
Comprobación del sensor del alerón
Incline el alerón hacia la derecha. El plato cíclico debe estar horizontal. Si no acurre así, o bien va
hacia otra dirección, vaya hacia el menú del sensor Ail e intercambie la función.
Comprobación del sensor del timón
Mueva el helicóptero en círculo, por ej. Hacia la derecha. Ahora el GT5 debe comprobar el timón
como si quisiera controlar hacia la otra dirección (aquí hacia la izquierda, como si el rotor de cola
quisiera soplar hacia la derecha).
X-> El rotor de cola sopla hacia la derecha y moverá la cola hacia la derecha = INCORRECTO
V -> El rotor de cola irá a la derecha y moverá la cola hacia la izquierda = CORRECTO

INST = Instalación dirección del GT5
Si el GT5 está instalado con el display en la parte superior, ajuste REV. Si está instalado de otro
modo, seleccione NORM.
Optimizador de Pirouetas
Active el menú. Ahora el plato cíclico apunta a un lado hacia abajo. Si hace rotar el helicóptero el
plato cíclico debe estar indicando una dirección. Si el plato cíclico está mirando hacia abajo y hacia la
izquierda y gira el heli 90º, el plato cíclico debe apuntar hacia abajo a la izquierda.
Si no está ajustado correctamente lo percibirá ya que las piruetas serán inestables.
Sensor deadband (banda muerta)
Ajuste el ancho de la área donde los sensores no regulan. Cuanto más bajo el valor, menor el ancho
de deadband. Normalmente este valor no debe modificarse.
Intensidad del filtro versus vibraciones
Normalmente no es preciso modificar este valor (2). A menor valor, menos vibraciones alcanzarán
los sensores (max. Fuerzafiltro=0). Un valor de 5 significa sin filtro. Todas las vibraciones pueden
alcanzar directamente los sensores y el sistema intentará balancearlos. (los servos se moverán
mucho, más consumo de energía, más carga del servo. Atención: pueden producirse daños al servo).
STICK MENU
Puede ajustar EXPO en el transmisor o en el GT5. Pr defecto hay un poco de expo en el GT5 para no
tener unos controles muy agresivos en la transmisión. Valores bajos = reacción agresiva. Valores
altos = reacciones suaves.
Expo-rudder -> timón: Expo para el rotor de cola
Expo-swash plate -> plato cíclico: Expo para el plato cíclico
Swashplate stick dynamic -> Stick dinámico del plato cíclico: La misma función que en el menú
P/I del plato cíclico
D-Tail stick -> Stick de cola: Es comparable con Expo negative y solamente es usado por
algunas pilotos de 3D. Normalmente no es necesario cambiar este valor.

Tail stick dynamic -> Stick de cola dinámico: La misma función que en el menú P/I del rotor de
cola. Los pilotos 3D lo suelen ajustar al 50, y los pilotos a escala por debajo de 50.
Tail stick deadband -> Stick de cola ancho muerto: Este valor no debe ser cambiado. Aquí
puede ajustar un ancho muerto para el plato cíclico o el rotor de cola, donde el helicóptero no
reaccionará a las órdenes dadas.
Swashplate stick deadband -> Stick del plato cíclico ancho muerto: Stick de cola ancho muerto
Este valor no debe ser cambiado. Aquí puede ajustar un ancho muerto para el plato cíclico o el rotor
de cola, donde el helicóptero no reaccionará a las órdenes dadas.
Stick – Calibration – tool -> Herramienta – stick – calibración: Este valor no debe ser cambiado.
El GT5 se calibra sólo a las distintas emisoras, aunque en algunas muy antiguas podría requerir usar
este menú para realizar las calibraciones. Pero en un 99% no será necesario!
MENU HERRAMIENTAS
Alerón – Sensor calibration -> Por favor no modifique estos valores, ya que representan las
calibraciones de los tres ejes. Después de la explicación de todos los símbolos del sistema los ajustes
se mostrarán en la viñeta gris. Lo mejor será que se anote los valores de inicio, de manera que no
precisará demostrar el GT5 para re calibración si usted ha cambiado algunos valores
accidentalmente.
Ail – scale – sensor ->
Tail – Sensor calibration ->
Rud – scale – sensor ->
Elevator – Sensor calibration ->
Elev – scale – sensor ->
Automatically go back to main menú -> Si usted no use el GT5 durante algunos segundos y está en
un sub-menú, le rebotará automáticamente al menú principal.
Auto exit ->
Normal receiver ->
FUTABA SBus
SPEKTRUM compatible -> Aquí debe escoger el tipo del receptor. S-Bus, Spektrum (satélites) o un
receptor externo, normal.

Transmitter setting -> Ajustes emisora: Este es solamente posible en conexión con el uso de
satélites Spektrum. Si el gas/pitch no trabaja correctamente, puede cambiar aquí entre DX7 y MC22
(con módulo Spektrum).
Binding -> Sincronización: Solamente para satélites Spektrum: active el menú y ambos
satélites parpadearán – la sincronización está activa. Ahora mantenga el botón de sincronización de
su emisora pulsado y ponga en marcha la emisora. La sincronización debería estar completa ahora.
Reset to default -> Ajuste de fabrica. Recupera los ajustes estándares.
Transfer data -> Este no tiene ninguna función otorgada, y no debe ser usado.
Calibración del elevador, alerón y sensores de cola: La calibración viene de fábrica y no debe ser
modificada.
Si hay alguna causa para cambiar estos valores o si los valores han sido modificados
accidentalmente sin seguir los valores de fábrica puede hacer la calibración aquí. Desinstale el GT5
del helicóptero, conéctelo con una batería externa y póngalo en marcha. Ahora puede escoger los 3
menús de los sensores. Haga doble clic para ajustar el valor a 0. Ahora gire el GT5 alrededor del eje y
verá como el 0 cambia de valor. El valor en el display debe cambiar de 0 hasta 89 si gira sobre 90º. Si
un número superior aparece (por ej. 92) el valor del eje debe ser ajustado. Haga un doble clic para
activar el menú y cambiar el valor a 3, luego guárdelo haciendo doble clic. Después de este
procedimiento compruebe el eje una vez más para asegurarse de que todo está calibrado
correctamente.
Trucos para el ajuste
Para el primer test de hover “P” y “I” debe ser ajustado sobre el 30-40% para el plato cíclico y la
cola. Dependiendo de su helicóptero y sus servos ahora puede incrementar este valor paso a paso.
Si un valor P es ajustado demasiado alto lo apreciará rápidamente debido a unas rápidas
oscilaciones en la cola o en el plato cíclico. Si está ajustado demasiado alto, la oscilación será más
lenta.
Por razones de seguridad hemos creado la característica de la ganancia total. Como puede apreciar
en el dibujo, puede ajustar la ganancia de 100% o 60% (por ejemplo). Puede seleccionar un
interruptor o un potenciómetro para esto. Si tiene una Spektrum la ganancia total es Ch7 y con
receptores externos es la parte central del cable 3 en 1, Term, del GT5.
Ahora puede hacer hovers con el heli con una ganancia total de por ejemplo 60%. El heli irá un poco
más lento o inestable. Si no hay oscilación en el plato cíclico o la cola puede volar en una altura
segura y poner la ganancia al 100%.

Si ni el plato cíclico ni la cola oscila puede aterrizar e incrementar solamente el P hasta que el
helicóptero se detenga de golpe. Si empieza a tambalearse debe reducir un poco el P.
Si el comportamiento de parada trabaja bien al 100% de ganancia total ajuste I. I es para ratios de
piruetas constantes en la cola y flippings constantes y rolls con el elevador y el alerón. No lo ajuste
demasiado alto (es un error que los pilotos hacen frecuentemente).
Debe ajustar I hasta que el elevador, el alerón y la cola trabajen correctamente. Si usted es un piloto
avanzado podrá testear las piruetas mientras vuela hacia atrás para ajustar el valor óptimo. Los
pilotos noveles pueden ajustar a 40 o dejar en 10 puntos por debajo del valor de P. Si, por ejemplo,
P es al 75%, ajuste I al 65%. Si la cola o el plato cíclico empiezan a balancear lentamente, el valor I
deberá ser reducido.
Si el helicóptero debe empezar a girar hacia arriba durante el vuelo, recuerde con la selección del
interruptor o del potenciómetro puede reducir todas las funciones del sensor a un valor reducido.
Ahora el balanceo debería parar.
Recuerde que con la ganancia el recorrido máximo de los servos será reducido. Por esta razón
siempre deje un 100% de ganancia total si está ajustando el recorrido del servo, plato cíclico, etc.
Por esta razón el helicóptero se nota mucho más dócil si cambia los ajustes del 100% al 60%.
Cuanto más rápidos sean los servos de la cola y del plato cíclico, más podrá exigir al rendimiento (en
comportamiento de parada). También la potencia de los servos juega un papel importante, por lo
que le recomendamos usar unos buenos servos. Un helicóptero de clase 50/90 debe de tener una
potencia de al menos 6kg. Para realizar vuelos 3D seleccione servos de al menos 10kg. Cuanto más
potentes, mejor.
Plato cíclico – hacia delante
La respuesta para una respuesta directa y rápida del plato cíclico. Si P e I para el plato cíclico están
ajustados, puede ajustar el menú “feed” (alimentar). Esta función controla la cantidad de fuerza de
control pasa directamente al plato cíclico sin regulación. Los pilotos de 3D deben usar 80-99- Con un
ajuste así el helicóptero responderá muy rápido a los controles dados lo que le dará unas
sensaciones rápidas, comparables a una barra estabilizadora de cabezal rotor.
Este valor debe estar probado previamente en un campo de vuelo para notar la diferencia y
encontrar sus preferencias.

Si este valor es ajustado demasiado alto el helicóptero puede balancearse o zigzaguear después
de paradas bruscas en el eje del elevador.
El elevador se muestra vacilante después de una parada brusca: D-Sens e I-D-Stick:
Si el helicóptero se muestra vacilante o se balancea después (y en el caso que el rotor del cabezal
y/o la mecánica no esté causando este problema) puede intentar incrementar el valor D-Sens en
pasos de 5 hasta que el comportamiento de parada sea perfecto (hasta 60-70%). Si la vacilación
sigue existiendo un poco, se puede reducir un poquito la función I-D-Stick. Para maniobras rápidas
hacia adelante funciona mejor un I-D Stick de un 100%. Si todo eso no ayuda, será debido a que otro
problema causa este efecto. Si el helicóptero es pequeño puede ser que tenga que reducir el I-D
Stick de 100 a 60-80%. Para helicópteros grandes normalmente no es necesario.
Parámetros básicos del rotor de cola
P es usado para un comportamiento de parada y mantiene la cola en su lugar si suceden grandes
maniobras en vuelo. Si P es demasiado alto, la cola empezará a vacilar/balancear. Si P es ajustado
demasiado bajo, la cola no estará en su posición y no realizará movimientos secos sino un poco
inestable.
El valor I se refiere al de la consistencia de las piruetas. Si ha encontrado el valor perfecto para P,
puede ajustar I. Aquí puede efectuar maniobras que requieran de mucha potencia en la cola
(maniobras rápidas hacia delante).
Los pilotos avanzados pueden intentar esto sin 3D. Simplemente deje que el helicóptero vuele hacia
delante y rote la cola. Deberá incrementar I paso a paso hasta que las piruetas sean constantes. Si
no quiere testear esto, puede ajustar un valor de test, que será 10 puntos inferior que P. Si la cola se
muestra vacilante, reduzca I hasta que se estabilice.
D-Sens: Optimizando el comportamiento de parada de la cola
Si la cola no se detiene en seco con el valor P al completo, puede optimizar el comportamiento de
parada con D-Sens. Normalmente el valor de D-Sens es la mitad que el valor P. Si P es el 70%, debe
empezar testando un valor D-Sens a más o menos 35%.

I-dyn: Reacción stick de cola
Aquí puede ajustar con el parámetro I-dyn la velocidad de respuesta del rotor de cola según las
ordenes dadas por el piloto. Los pilotos 3D ajustaran entre un 45 y 50, mientras que pilotos a escala
entre 20-30.
Truco: Velocidad en las piruetas
La velocidad máxima de velocidad en las piruetas es ajustada directamente en el menú del recorrido
del servo de su emisora. Solamente seleccione el canal del servo correspondiente (normalmente Ch
4). Cuanto más alto el valor, más rápido girará la cola.
Truco: Agilidad del alerón y del elevador
En el menú del plato cíclico encontrará los ajustes para Elv=elevador, y Ail=alerón
Estos valores deben mantenerse al 100. Así como la ratio de piruetas también puede ajustar la
velocidad del elevador y el alerón por encima del recorrido máximo en su emisora. Si usted reduce
el recorrido del servo para el elevador de 100 hasta 70 en su emisora bajará la velocidad en la cual el
helicóptero da vueltas sobre el elevador. Si quiere incrementar la agilidad deberá incrementar el
recorrido del servo de su emisora (puede ajustar por encima de 100% si es necesario. Si el recorrido
máximo de su emisora no es suficiente, puede ajustar más del 100% en el GT5.
El GT5 tiene un montón de posibilidades de ajustes. Al principio puede parecer un poco complicado,
pero puede ser posible alcanzar los ajustes perfectos por su estilo personal de vuelo. Además de que
podrá alcanzar un rendimiento superior que no le será posible en otros sistemas (o sistemas que
tienen unos ajustes “rígidos”). Por esa razón hemos creado un sistema muy flexible de alto
rendimiento que se adapte perfectamente a usted.
Si usted cambia algunos ajustes del GT5, solamente cambie un ajuste cada vez. Si lo hace de esta
manera, podrá comprobar cada vez si los cambios efectuados son de su agrado. Si cambia
demasiados ajustes, le resultará un poco confuso y le será mucho más difícil encontrar su ajuste
ideal.