Especificación funcional Rev0C.pdf
18
ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS Especificación Funcional Fecha de Revisión Número Código del orden Código del documento Página No. De : 04/ Diciembre /2012 1 1 18 “Control de nivel de llenado de lingotes Zinc en Lingotera Norte” 1 12/ Nov/12 Especificación Funcional Ing. Ricardo Hernández Ing. Ricardo Hernández Met.Mex Peñoles ______________ Met.Mex Peñoles _______________ Rev. Fecha Documento Elaboró Revisó Recibió Aprobó
-
Upload
kesia-isabel-holguin -
Category
Documents
-
view
49 -
download
4
Transcript of Especificación funcional Rev0C.pdf

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 1 18
“Control de nivel de llenado de lingotes Zinc en Lingotera Norte”
1 12/
Nov/12 Especificación
Funcional
Ing. Ricardo
Hernández
Ing. Ricardo
Hernández
Met.Mex Peñoles
______________
Met.Mex Peñoles
_______________
Rev. Fecha Documento Elaboró Revisó Recibió Aprobó

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 2 18
INDICE Página
INDICE 2
DESCRIPCION GENERAL 3
METODOLOGIA DE CONTROL 7
LISTADO DE ALARMAS 16
ANEXO INGENIERIA DE CONTROL NA

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 3 18
1. DESCRIPCION GENERAL
El objetivo de controlar la velocidad con más precisión del motor de la bomba
dosificadora de zinc es para obtener una altura casi constante de los lingotes de
zinc (30mm para las patas y 54mm para los lingotes no patas), para obtener el
peso lo más cercano a 25 kilogramos, así establecer el peso de la estiba en un
rango de 964 kilogramos mínimo y máximo 1036 kilogramos. Para hacer el
control de velocidad de bombeo de Zinc establecemos los siguientes contextos:
1) Control de Voltaje y frecuencia.
La magnitud de esta corriente de magnetismo puede ser calculada desde:
V = tensión de alimentación
f = frecuencia de alimentación
L = inductancia de magnetismo del estator
De esto, se puede observar que si la frecuencia de alimentación es reducida sin
reducir la tensión, entonces la corriente de magnetismo se incrementará
inversamente con la frecuencia.
Este efecto causará que el motor se sature magnéticamente, a menos que la
tensión suministrada al motor sea reducida con la frecuencia. Entonces, en un
controlador de velocidad electrónico, la tensión de alimentación al motor debe
ser ajustada en proporción con la frecuencia, para mantener la corriente en el
camino de magnetismo constante.

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 4 18
2) Control directo de Par (por torque):
En definición el control directo de par o DTC es con Conmutación de
distintas combinaciones para generar los distintos factores de campo
magnético.
Se tiene excelente respuesta en la velocidad tiempo Par. No se necesita retro-
alimentación se tiene precisión equiparable a la del motor de CD. Se tiene una
respuesta estática y dinámica de 8 veces más precisa de un Drive de CA
estándar.

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 5 18
Se logra la generación de par a velocidad cero, sin retro-alimentación sustituye
el 95% de las aplicaciones de variación de velocidad en CD, mejora su
respuesta con retro-alimentación, la respuesta independiente del lazo de par y
velocidad se tienen en dos referencias de control.

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 6 18
Teniendo de esta manera el control más preciso de la velocidad de la bomba de
dosificación de Zinc, se propone establecer un control del llenado de lingotes
basado en el siguiente diagrama:
Bomba Zinc
E-2
Moldeadora
Flujo de zinc
Dosificación de Zinc
CLXL61
M
Laser
4-20Ma
Control de Velocidad Y Monitoreo de Torque
Control de Velocidad Y Monitoreo de Torque
PPdeMedicion
Inicio
Señal Digital
Señal Digital
P-15
P-16
ACS800 ACS800
Figura 07. Diagrama de llenado de lingotes.
Dentro del sistema se contempla como controlador un PLC de Marca AB de la
gama controllogix L61 para la ejecución de control del nivel, control del variador
de la bomba dosificadora de zinc, control del variador de motor del
transportador de moldeadora, además de adquisición de mediciones y
monitoreo. Comunicado con una pantalla CP630 de la marca ABB para la
interface hombre máquina (HMI). Teniendo en periféricos dos sensores de
posición para determinar el lugar de medición y el inicio de transportador
además el sensor láser para obtener la lectura de la altura de los lingotes.

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 7 18
2. METODOLOGIA DE CONTROL
Para el control a nivel software de velocidad de dosificación, manipulación y
manejo de datos se establecen dos protocolos de comunicación entre los
dispositivos entre PLC AB y el AB se estable hardwire para poder tener
interbloqueo. Ethernet para comunicarse con la Panel view CP630 estableciendo
la interface hombre máquina. Devicenet para la comunicación con los
variadores ACS800 que controlaran los motores de la bomba dosificadora y el
motor del transportador.
Figura 08. Descripción a de comunicaciones
CP630
comunicación
Ethernet
Comunicación
Devicenet
Controllogix Sistema
Controllogix Maquina Lingotera
Comunicación hardwire

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 8 18
El control de velocidades en RPM para la bomba se establece mediante
la interacción y toma de decisiones entre las matrices de datos. Estas matrices
son de dimensiones cuatro por treinta y seis, se establecen las siguientes
matrices para la manipulación de datos.
Matriz de distancias en Vacio.
Matriz de alturas variables.
Matriz de valores constantes.
Matriz de limite RPM.
Matriz variable en RPM.
Matriz de comparación.
Estas matrices son dedicadas para el procesamiento de los datos de altura,
valores de velocidad para los Variadores en unidades RPM, auto salvar el último
valor, retroalimentarse. Cada matriz tiene un lugar específico para queda
lingote de las 4 estibas que se forman a lo largo de la lingotera.
En el siguiente diagrama a flujo se describe la programación a realizar para la
toma de decisiones de aumentar o disminuir la velocidad de la bomba
dosificadora de Zinc. Los elementos de entrada de Parte Presente son
necesarios para los saltos entre las matrices y en la repetitividad de la
medición de la altura del lingote.
En el siguiente diagrama se muestra la metodología para la programación de
este algoritmo:

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 9 18
INICIO
From Control+ -de palanca en
HMI
Modo de Operacion
No MODO
From Control +-de palanca en
HMI
Arranque de motor del transportador
Arramque de la bomba
dosificadora de Zinc
Arranque HMI Transp
Arranque HMIBomb
SiNo
Si
Sistema SinfallosMANUAL
No
SI
IngresarMatriz Vacio
From HMI ajuste a
condiciones iniciales
AUTOMATICO
Arranca la lingotera y con Indicación PP se leen datos de altura y se vacian a la Matriz de alturas en Vacio
SI
Sistema SinfallosNO
SI
Todas las condiciones
listas
No
NoFrom CLXCondiciones para Operar
OK
Condiciones Internas AC500 Para operarOK
Arranque del sistema
SI
Se compara con la Matriz de comparación
Se obtiene un resultado
La Altura esta dentro del rango
Se toma la medición
de la Altura
Se convierte a RPM y se guarda en la Matriz Variable en
RPM
Se cargan los datos
guardados en RPM de la
Matriz Variable en
RMP
NO
El Resultado esta dentro del rango en RPM
SI
Matriz de Limite en
RPM
Se Alarma y no se mueve el dato de
RPMsNO
PPs para Leer
SI
Figura 09. Diagrama de Flujo

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 10 18
A continuación se detallan las matrices utilizadas para el manejo de datos y la
función que desempeñara:
Figura 10. Matriz Distancias en Vacio.
En esta matriz de guardaran los datos de la lectura de cada uno de los moldes
contenidos de la moldeadora.
Pata 1 r1 1 41 81 121Pata 2 r2 2 42 82 122Pata 3 r3 3 43 83 123Pata 4 r4 4 44 84 124Ling1 r5 5 45 85 125Ling2 r6 6 46 86 126Ling3 r7 7 47 87 127Ling4 r8 8 48 88 128Ling5 r9 9 49 89 129Ling6 r10 10 50 90 130Ling7 r11 11 51 91 131Ling8 r12 12 52 92 132Ling9 r13 13 53 93 133Ling10 r14 14 54 94 134Ling11 r15 15 55 95 135Ling12 r16 16 56 96 136Ling13 r17 17 57 97 137Ling14 r18 18 58 98 138Ling15 r19 19 59 99 139Ling16 r20 20 60 100 140Ling17 r21 21 61 101 141Ling18 r22 22 62 102 142Ling19 r23 23 63 103 143Ling20 r24 24 64 104 144Ling21 r25 25 65 105 145Ling22 r26 26 66 106 146Ling23 r27 27 67 107 147Ling24 r28 28 68 108 148Ling25 r29 29 69 109 149Ling26 r30 30 70 110 150Ling27 r31 31 71 111 151Ling28 r32 32 72 112 152Ling29 r33 33 73 113 153Ling30 r34 34 74 114 154Ling31 r35 35 75 115 155Ling32 r36 36 76 116 156Ling33 r37 37 77 117 157Ling34 r38 38 78 118 158Ling35 r39 39 79 119 159Ling36 r40 40 80 120 160
F3F1 F2 F4
Matriz de Distancias en Vacio
Estiba 1 Estiba 2 Estiba 3 Estiba 4

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 11 18
Figura 11. Matriz de constantes
Estos datos son llenados directamente por el Programador para hacer el
algoritmo de comparación y compensación.
Pata 1 r1 1 30 41 30 81 30 121 30Pata 2 r2 2 30 42 30 82 30 122 30Pata 3 r3 3 30 43 30 83 30 123 30Pata 4 r4 4 30 44 30 84 30 124 30Ling1 r5 5 54 45 54 85 54 125 54Ling2 r6 6 54 46 54 86 54 126 54Ling3 r7 7 54 47 54 87 54 127 54Ling4 r8 8 54 48 54 88 54 128 54Ling5 r9 9 54 49 54 89 54 129 54Ling6 r10 10 54 50 54 90 54 130 54Ling7 r11 11 54 51 54 91 54 131 54Ling8 r12 12 54 52 54 92 54 132 54Ling9 r13 13 54 53 54 93 54 133 54Ling10 r14 14 54 54 54 94 54 134 54Ling11 r15 15 54 55 54 95 54 135 54Ling12 r16 16 54 56 54 96 54 136 54Ling13 r17 17 54 57 54 97 54 137 54Ling14 r18 18 54 58 54 98 54 138 54Ling15 r19 19 54 59 54 99 54 139 54Ling16 r20 20 54 60 54 100 54 140 54Ling17 r21 21 54 61 54 101 54 141 54Ling18 r22 22 54 62 54 102 54 142 54Ling19 r23 23 54 63 54 103 54 143 54Ling20 r24 24 54 64 54 104 54 144 54Ling21 r25 25 54 65 54 105 54 145 54Ling22 r26 26 54 66 54 106 54 146 54Ling23 r27 27 54 67 54 107 54 147 54Ling24 r28 28 54 68 54 108 54 148 54Ling25 r29 29 54 69 54 109 54 149 54Ling26 r30 30 54 70 54 110 54 150 54Ling27 r31 31 54 71 54 111 54 151 54Ling28 r32 32 54 72 54 112 54 152 54Ling29 r33 33 54 73 54 113 54 153 54Ling30 r34 34 54 74 54 114 54 154 54Ling31 r35 35 54 75 54 115 54 155 54Ling32 r36 36 54 76 54 116 54 156 54Ling33 r37 37 54 77 54 117 54 157 54Ling34 r38 38 54 78 54 118 54 158 54Ling35 r39 39 54 79 54 119 54 159 54Ling36 r40 40 54 80 54 120 54 160 54
Matriz de constantes
Estiba 3 Estiba 4
F1 F2 F3 F4
Estiba 1 Estiba 2

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 12 18
Figura 12. Matriz de Comparación
Al ejecutase por primera vez el barrido de lecturas en vacio esta matriz se llena
con las mediciones de ajuste con la cual se realizara la comparación de alturas.
Pata 1 r1 1 41 81 121Pata 2 r2 2 42 82 122Pata 3 r3 3 43 83 123Pata 4 r4 4 44 84 124Ling1 r5 5 45 85 125Ling2 r6 6 46 86 126Ling3 r7 7 47 87 127Ling4 r8 8 48 88 128Ling5 r9 9 49 89 129Ling6 r10 10 50 90 130Ling7 r11 11 51 91 131Ling8 r12 12 52 92 132Ling9 r13 13 53 93 133Ling10 r14 14 54 94 134Ling11 r15 15 55 95 135Ling12 r16 16 56 96 136Ling13 r17 17 57 97 137Ling14 r18 18 58 98 138Ling15 r19 19 59 99 139Ling16 r20 20 60 100 140Ling17 r21 21 61 101 141Ling18 r22 22 62 102 142Ling19 r23 23 63 103 143Ling20 r24 24 64 104 144Ling21 r25 25 65 105 145Ling22 r26 26 66 106 146Ling23 r27 27 67 107 147Ling24 r28 28 68 108 148Ling25 r29 29 69 109 149Ling26 r30 30 70 110 150Ling27 r31 31 71 111 151Ling28 r32 32 72 112 152Ling29 r33 33 73 113 153Ling30 r34 34 74 114 154Ling31 r35 35 75 115 155Ling32 r36 36 76 116 156Ling33 r37 37 77 117 157Ling34 r38 38 78 118 158Ling35 r39 39 79 119 159Ling36 r40 40 80 120 160
Matriz de comparación
Estiba 1 Estiba 2 Estiba 3 Estiba 4
F1 F2 F3 F4

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 13 18
Figura 13. Matriz de alturas Variables
Esta matriz se llenara cada vez que se lea la altura del lingote vaciado. Después
se realiza el algoritmo para compensar las RPM del variador de la bomba
dosificadora de zinc.
Pata 1 r1 1 41 81 121Pata 2 r2 2 42 82 122Pata 3 r3 3 43 83 123Pata 4 r4 4 44 84 124Ling1 r5 5 45 85 125Ling2 r6 6 46 86 126Ling3 r7 7 47 87 127Ling4 r8 8 48 88 128Ling5 r9 9 49 89 129Ling6 r10 10 50 90 130Ling7 r11 11 51 91 131Ling8 r12 12 52 92 132Ling9 r13 13 53 93 133Ling10 r14 14 54 94 134Ling11 r15 15 55 95 135Ling12 r16 16 56 96 136Ling13 r17 17 57 97 137Ling14 r18 18 58 98 138Ling15 r19 19 59 99 139Ling16 r20 20 60 100 140Ling17 r21 21 61 101 141Ling18 r22 22 62 102 142Ling19 r23 23 63 103 143Ling20 r24 24 64 104 144Ling21 r25 25 65 105 145Ling22 r26 26 66 106 146Ling23 r27 27 67 107 147Ling24 r28 28 68 108 148Ling25 r29 29 69 109 149Ling26 r30 30 70 110 150Ling27 r31 31 71 111 151Ling28 r32 32 72 112 152Ling29 r33 33 73 113 153Ling30 r34 34 74 114 154Ling31 r35 35 75 115 155Ling32 r36 36 76 116 156Ling33 r37 37 77 117 157Ling34 r38 38 78 118 158Ling35 r39 39 79 119 159Ling36 r40 40 80 120 160
Estiba 2
F2 F3 F4
Estiba 3 Estiba 4
Matriz de alturas Variables
F1
Estiba 1

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 14 18
Figura 14. Matriz variable en RPM.
Después del algoritmo se guarda el nuevo valor en RPM para que al paso
siguiente se refleje el cambio de velocidad y dosificación de la bomba
dosificadora de zinc.
Pata 1 r1 1 41 81 121Pata 2 r2 2 42 82 122Pata 3 r3 3 43 83 123Pata 4 r4 4 44 84 124Ling1 r5 5 45 85 125Ling2 r6 6 46 86 126Ling3 r7 7 47 87 127Ling4 r8 8 48 88 128Ling5 r9 9 49 89 129Ling6 r10 10 50 90 130Ling7 r11 11 51 91 131Ling8 r12 12 52 92 132Ling9 r13 13 53 93 133Ling10 r14 14 54 94 134Ling11 r15 15 55 95 135Ling12 r16 16 56 96 136Ling13 r17 17 57 97 137Ling14 r18 18 58 98 138Ling15 r19 19 59 99 139Ling16 r20 20 60 100 140Ling17 r21 21 61 101 141Ling18 r22 22 62 102 142Ling19 r23 23 63 103 143Ling20 r24 24 64 104 144Ling21 r25 25 65 105 145Ling22 r26 26 66 106 146Ling23 r27 27 67 107 147Ling24 r28 28 68 108 148Ling25 r29 29 69 109 149Ling26 r30 30 70 110 150Ling27 r31 31 71 111 151Ling28 r32 32 72 112 152Ling29 r33 33 73 113 153Ling30 r34 34 74 114 154Ling31 r35 35 75 115 155Ling32 r36 36 76 116 156Ling33 r37 37 77 117 157Ling34 r38 38 78 118 158Ling35 r39 39 79 119 159Ling36 r40 40 80 120 160
Matriz variable en RPM
Estiba 1 Estiba 2 Estiba 3 Estiba 4
F1 F2 F3 F4

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 15 18
Figura 15. Matriz de Limite de RPM
En esta matriz están guardados los límites de velocidad para no tener un
desborde de zinc.
Pata 1 r1 1 41 81 121Pata 2 r2 2 42 82 122Pata 3 r3 3 43 83 123Pata 4 r4 4 44 84 124Ling1 r5 5 45 85 125Ling2 r6 6 46 86 126Ling3 r7 7 47 87 127Ling4 r8 8 48 88 128Ling5 r9 9 49 89 129Ling6 r10 10 50 90 130Ling7 r11 11 51 91 131Ling8 r12 12 52 92 132Ling9 r13 13 53 93 133Ling10 r14 14 54 94 134Ling11 r15 15 55 95 135Ling12 r16 16 56 96 136Ling13 r17 17 57 97 137Ling14 r18 18 58 98 138Ling15 r19 19 59 99 139Ling16 r20 20 60 100 140Ling17 r21 21 61 101 141Ling18 r22 22 62 102 142Ling19 r23 23 63 103 143Ling20 r24 24 64 104 144Ling21 r25 25 65 105 145Ling22 r26 26 66 106 146Ling23 r27 27 67 107 147Ling24 r28 28 68 108 148Ling25 r29 29 69 109 149Ling26 r30 30 70 110 150Ling27 r31 31 71 111 151Ling28 r32 32 72 112 152Ling29 r33 33 73 113 153Ling30 r34 34 74 114 154Ling31 r35 35 75 115 155Ling32 r36 36 76 116 156Ling33 r37 37 77 117 157Ling34 r38 38 78 118 158Ling35 r39 39 79 119 159Ling36 r40 40 80 120 160
Matriz de Limite en RPM
Estiba 1 Estiba 2 Estiba 3 Estiba 4
F4F1 F2 F3

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 16 18
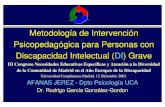
Con este control de velocidad enfocado en el variador como principal
controlador de nivel en modo de operación por control por par y no por Hz
(control por RPM), se pretende tener los siguientes resultados gráficos en la
lectura de alturas del nivel de los lingotes lo mas cercano a 25 kilos y un peso
de la estiba mayor a 964 kilogramos y menor a 1036 kilogramos.
Representados con altura de 0 100 y vueltas de la lingotera.
Figura 16. Proyección en grafica de Alturas.
5060708090
100110
1 22 43 64 85 106
127
148 9 30 51 72 93 114
135
156 17 38 59 80 101
122
143 4 25 46 67 88 109
130
151
altu
ra d
e lin
gote
Número de lingote
Gráfico de alturas
Altura deseada medida de altura

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 17 18
4.- LISTADO DE ALARMAS:
Alarmas del Sistema A001 Sensor pp1 quedo energizado A002 Sensor pp1 no encendió A003 Sensor pp2 quedo energizado A004 Sensor pp2 no encendió A005 Lingote con sobre nivel A006 Lingote con bajo nivel A007 Velocidad del variador fuera de rango A008 VELOCIDAD LIMITE PARA rpm DE BOMBA A009 Código de falla 1 cortocircuito vfd 1 A010 Código de falla 1 sobretens cc vfd 1 A011 Código de falla 1 temp del radiador vfd 1 A012 Código de falla 1 fallo a tierra vfd 1 A013 Código de falla 1 termistor vfd 1 A014 Código de falla 1 temperatura del motor vfd 1 A015 Código de falla 1 sistema en falla vfd 1 A016 Código de falla 1 baja carga vfd 1 A017 Código de falla 1 sobre frecuencia vfd 1 A018 Código de falla 2 fase de red vfd 1 A019 Código de falla 2 no datos del motor vfd 1 A020 Código de falla 2 sobre tensión de cc vfd 1 A021 Código de falla 2 permiso de marcha vfd 1 A022 Código de falla 2 encoder err vfd 1 A023 Código de falla 2 i o comm vfd 1 A024 Código de falla 2 control b temperatura vfd 1 A025 Código de falla 2 fallo externo vfd 1 A026 Código de falla 2 over sw freq vfd 1 A027 Código de falla 2 función ea< min vfd 1 A028 Código de falla 2 ppcc linck vfd 1 A029 Código de falla 2 comm module vfd 1 A030 Código de falla 2 fallo panel vfd 1 A031 Código de falla 2 motor bloqueado vfd 1

ABCONTROL S.A. de C.V. DESARROLLO DE PROYECTOS DE INGENIERÍA AUTOMATIZACIÓN Y CONTROL DE PROCESOS
Especificación Funcional
Fecha de Revisión Número Código del orden Código del documento Página No. De :
04/ Diciembre
/2012
1 18 18
A032 Código de falla 2 fase motor vfd 1 A033 Código de falla 1 cortocircuito vfd 2 A034 Código de falla 1 sobretens cc vfd 2 A035 Código de falla 1 temp del radiador vfd 2 A036 Código de falla 1 fallo a tierra vfd 2 A037 Código de falla 1 termistor vfd 2 A038 Código de falla 1 temperatura del motor vfd 2 A039 Código de falla 1 sistema en falla vfd 2 A040 Código de falla 1 baja carga vfd 2 A041 Código de falla 1 sobre frecuencia vfd 2 A042 Código de falla 2 fase de red vfd 2 A043 Código de falla 2 no datos del motor vfd 2 A044 Código de falla 2 sobre tensión de cc vfd 2 A045 Código de falla 2 permiso de marcha vfd 2 A046 Código de falla 2 encoder err vfd 2 A047 Código de falla 2 i o comm vfd 2 A048 Código de falla 2 control b temperatura vfd 2 A049 Código de falla 2 fallo externo vfd 2 A050 Código de falla 2 over sw freq vfd 2 A051 Código de falla 2 función ea < min vfd 2 A052 Código de falla 2 ppcc linck vfd 2 A053 Código de falla 2 comm module vfd 2 A054 Código de falla 2 fallo panel vfd 2 A055 Código de falla 2 motor bloqueado vfd 2 A056 Código de falla 2 fase motor vfd 2