El Plano Cartesiano
7
El plano cartesiano El plano cartesiano está formado por dos rectas numéricas perpendiculares, una horizontal y otra vertical que se cortan en un punto. La recta horizontal es llamada eje de las abscisas o de las equis (x), y la vertical, eje de las ordenadas o de las yes, (y); el punto donde se cortan recibe el nombre de origen. El plano cartesiano tiene como finalidad describir la posición de puntos, los cuales se representan por sus coordenadas o pares ordenados. Las coordenadas se forman asociando un valor del eje de las equis a uno de las yes, respectivamente, esto indica que un punto (P) se puede ubicar en el plano cartesiano tomando como base sus coordenadas, lo cual se representa como: P (x, y) Para localizar puntos en el plano cartesiano se debe llevar a cabo el siguiente procedimiento: 1. Para localizar la abscisa o valor de x, se cuentan las unidades correspondientes hacia la derecha si son positivas o hacia la izquierda si son negativas, a partir del punto de origen, en este caso el cero. 2. Desde donde se localiza el valor de x, se cuentan las unidades correspondientes (en el eje de las ordenadas) hacia arriba si son positivas o hacia abajo, si son negativas y de esta forma se localiza cualquier punto dadas ambas coordenadas. Ver: PSU: Geometría; Pregunta 04_2005 Ejemplo: Localizar el punto A (-4, 5) en el plano cartesian o. El punto A se ubica 4 lugares hacia la izquierda en la
-
Upload
armando-francisco-paz -
Category
Documents
-
view
47 -
download
2
Transcript of El Plano Cartesiano
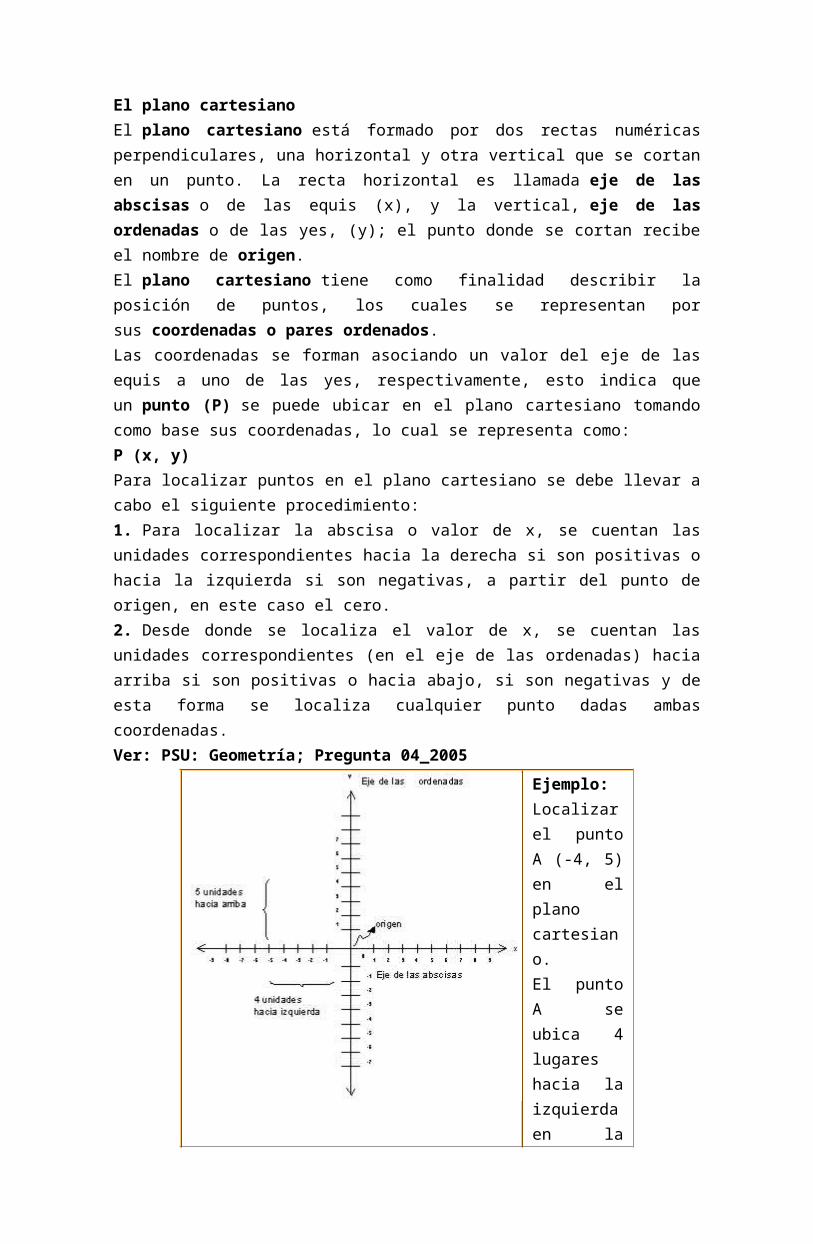
El plano cartesiano El plano cartesiano está formado por dos rectas numéricas perpendiculares, una horizontal y otra vertical que se cortan en un punto. La recta horizontal es llamada eje de las abscisas o de las equis (x), y la vertical, eje de las ordenadas o de las yes, (y); el punto donde se cortan recibe el nombre de origen.El plano cartesiano tiene como finalidad describir la posición de puntos, los cuales se representan por sus coordenadas o pares ordenados.Las coordenadas se forman asociando un valor del eje de las equis a uno de las yes, respectivamente, esto indica que un punto (P) se puede ubicar en el plano cartesiano tomando como base sus coordenadas, lo cual se representa como:P (x, y)Para localizar puntos en el plano cartesiano se debe llevar a cabo el siguiente procedimiento:1. Para localizar la abscisa o valor de x, se cuentan las unidades correspondientes hacia la derecha si son positivas o hacia la izquierda si son negativas, a partir del punto de origen, en este caso el cero.2. Desde donde se localiza el valor de x, se cuentan las unidades correspondientes (en el eje de las ordenadas) hacia arriba si son positivas o hacia abajo, si son negativas y de esta forma se localiza cualquier punto dadas ambas coordenadas.Ver: PSU: Geometría; Pregunta 04_2005
Ejemplo:Localizar el punto A (-4, 5) en el plano cartesiano.El punto A se ubica 4 lugares hacia la izquierda en la abcisa (x) y 5 lugares hacia arriba en ordenada (y).
De modo inverso, este procedimiento también se emplea cuando se requiere determinar las coordenadas de cualquier punto que esté en el plano cartesiano.

Ejemplo:Determinar las coordenadas del punto M.Las coordenadas del punto M son (3,-5).
De lo anterior se concluye que:
Para determinar las coordenadas de un punto o localizarlo en el plano cartesiano, se encuentran unidades correspondientes en el eje de las x hacia la derecha o hacia la izquierda y luego las unidades del eje de las y hacia arriba o hacia abajo, según sean positivas o negativas, respectivamente.
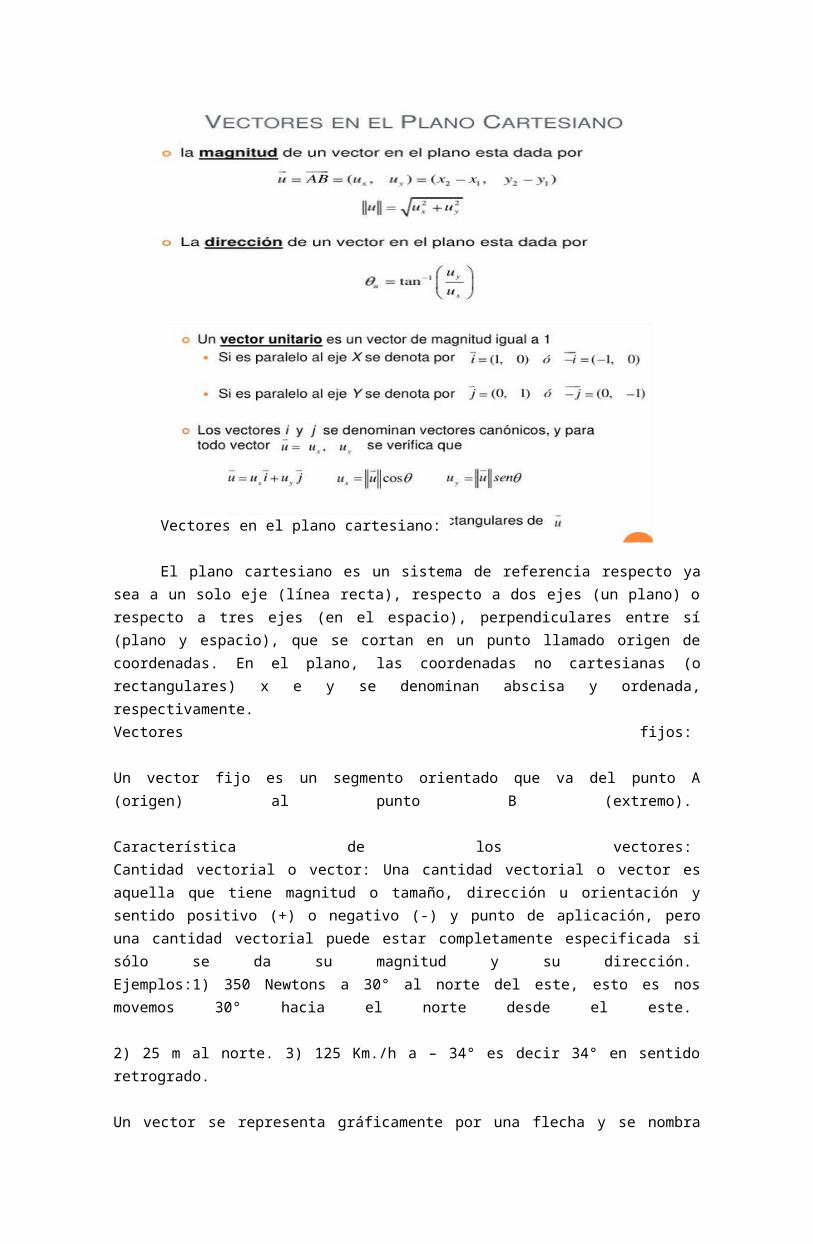
Vectores en el plano cartesiano:
El plano cartesiano es un sistema de referencia respecto ya sea a un solo eje (línea recta), respecto a dos ejes (un plano) o respecto a tres ejes (en el espacio), perpendiculares entre sí (plano y espacio), que se cortan en un punto llamado origen de coordenadas. En el plano, las coordenadas no cartesianas (o rectangulares) x e y se denominan abscisa y ordenada, respectivamente. Vectores fijos:
Un vector fijo es un segmento orientado que va del punto A (origen) al punto B (extremo).
Característica de los vectores: Cantidad vectorial o vector: Una cantidad vectorial o vector es aquella que tiene magnitud o tamaño, dirección u orientación y sentido positivo (+) o negativo (-) y punto de aplicación, pero una cantidad vectorial puede estar completamente especificada si sólo se da su magnitud y su dirección. Ejemplos:1) 350 Newtons a 30° al norte del este, esto es nos movemos 30° hacia el norte desde el este.
2) 25 m al norte. 3) 125 Km./h a – 34° es decir 34° en sentido retrogrado. Un vector se representa gráficamente por una flecha y se nombra con una letra mayúscula ej. A = 25 lb. a 120°. La dirección de un vector se puede indicar con un ángulo o con los puntos cardinales y un ángulo. No se debe confundir desplazamiento con distancia, el desplazamiento esta indicado por una magnitud y un ángulo o dirección, mientras que la distancia es una cantidad escalar. Por ejemplo si un vehículo va de un punto A a otro B puede realizar diferentes caminos o trayectorias en las cuales se puede distinguir estos dos conceptos de distancia y desplazamiento.
S1 y S2 Son las distancias que se recorren entre los puntos y son escalares. D1 y D2 son los desplazamientos vectoriales. La distancia total será la cantidad escalar S1 + S2 en la cual se puede seguir cualquier trayectoria, y el desplazamiento total será la cantidad vectorial R =D1 +D2
Vectores equivalentes:
Dos vectores son equivalentes cuando tienen el mismo módulo, la misma dirección y el mismo sentido.
Expresión de un vector en forma polar: En la figura se representa un sistema de coordenadas polares en el plano, el centro de referencia (punto O) y la línea OL sobre la que se miden los ángulos. Para referenciar un punto se indica la distancia al centro de coordenadas y el ángulo sobre el eje OL. • El punto (3, 60º) indica que está a una distancia de 3 unidades desde O, medidas con un ángulo de 60º sobre OL. • El punto (4, 210º) indica que está a una distancia de 4 unidades desde O y un ángulo de 210º sobre OL.

Un punto, definido por un ángulo y una distancia, es el mismo punto que el indicado por ese mismo ángulo más un número de revoluciones completas y la misma distancia. En general, el punto (r, θ) se puede representar como (r, θ ± n×360°) o (−r, θ ± (2n + 1)180°), donde n es un número entero cualquiera.• El centro de coordenadas está definido por una distancia nula, independientemente de los ángulos que se especifiquen. Normalmente se utilizan las coordenadas arbitrarias (0, θ) para representar el polo, ya que independientemente del valor que tome el ángulo θ, un punto con radio 0 se encuentra siempre en el polo.[5] Estas circunstancias deben tenerse en cuenta para evitar confusiones en este sistema de coordenadas. Para obtener una única representación de un punto, se suele limitar r a números no negativos r ≥ 0 y θ al intervalo [0, 360°) o (−180°, 180°] (en radianes, [0, 2π) o (−π, π]).[6] Los ángulos en notación polar se expresan normalmente en grados o en radianes, dependiendo del contexto. Por ejemplo, las aplicaciones de navegación marítima utilizan las medidas en grados, mientras que algunas aplicaciones físicas (especialmente la mecánica rotacional) y la mayor parte del cálculo matemático expresan las medidas en radianes.
Vectores libres en el plano: El conjunto de todos los vectores equipolentes entre sí se llama vector libre. Es decir los vectores libres tienen el mismo módulo, dirección y sentido.
Vectores notables: Los vectores notables son los denominados e1,e2,...en, donde 1,2,...,n son subíndices, y se escriben de la siguiente forma (0,0,0,...,0,1,0,...,0) donde el 1 está en la n-esima posición. Otro vector notable es el nulo (0, 0, 0,0,...,0)
Suma de vectores Para sumar dos vectores libres [pic]y [pic]se escogen como representantes dos vectores tales que el extremo de uno coincida con el origen del otro vector. Regla del paralelogramo Se toman como representantes dos vectores con el origen en común, se trazan rectas paralelas a los vectores obteniéndose un paralelogramo cuya diagonal coincide con la suma de los vectores. Para sumar dos vectores se suman sus respectivas componentes.
Propiedades de la suma de vectores: Asociativa Conmutativa Elemento neutro Elemento opuesto Resta de vectores
Para restar dos vectores libres se suma con el opuesto de Las componentes del vector resta se obtienen restando las componentes de los vectores.
Producto de un número real por un vector: El producto de un vector (no nulo), por un número real k es otro vector cuyas
componentes se obtienen multiplicando por k las componentes deEjemplos: Vector combinación lineal Un vector se dice que es combinación lineal de un conjunto de vectores si existe una forma de expresarlo como suma de parte o todos los vectores de multiplicados cada uno de ellos por un coeficiente escalar , de forma que: Así, es combinación lineal de vectores de si podemos expresar como una suma de múltiplos de una cantidad finita de elementos de .Ejemplo: 2x + 3y − 2z = 0. Se dice que z es combinación lineal de x y de y, porque podemos escribir sin más que despejar la z. De la misma manera, despejando oportunamente, cada una de estas variables se podría expresar como combinación lineal de las otras dos. En otras palabras, cuánto de cada vector del conjunto necesito para que, cuando se combinen linealmente dichos elementos, pueda formar al vector en cuestión.
Dependencia e independencia lineal: En álgebra lineal, un conjunto de vectores es linealmente independiente si ninguno de ellos puede ser escrito con una combinación lineal de los restantes. Por ejemplo, en R3, los vectores (1, 0, 0), (0, 1, 0) y (0, 0, 1) son linealmente independientes, mientras que (2, −1, 1), (1, 0, 1) y (3, −1, 2) no lo son, ya que el tercero es la suma de los dos primeros. Sea {v1, v2,..., vn} un conjunto de vectores. Decimos que son linealmente dependientes si existen números 'a1, a2,..., an, no todos iguales a cero, tal que:
Nótese que el símbolo a la derecha del signo igual no es cero, sino que simboliza al vector nulo. El conjunto de vectores nulos forma la matriz nula. Si tales números no existen, entonces los vectores son linealmente independientes. Utilizando conceptos de espacios vectoriales podemos redefinir la independencia lineal así: Un conjunto de vectores U de un espacio vectorial es linealmente independiente si ∀
Esta idea es importante porque los conjuntos de vectores que son linealmente independientes y generan a un espacio vectorial, forman una base para dicho espacio.
Vector unitario: En álgebra lineal y en la Física, un vector unitario o versor es un vector de módulo uno. En ocasiones se lo llama también vector normalizado. Sea el vector v ∈ ℝn. Se dice que v es un vector unitario y se lo denota mediante si y solamente si |v| = 1. O en forma más compacta:
Producto escalar de 2 vectores: El producto interior o producto escalar de dos vectores en un espacio vectorial es una forma bilineal, hermética y definida positiva, por lo que se puede considerar una forma cuadrática definida positiva. Un producto escalar se puede expresar como una aplicación donde V es un espacio vectorial y es el cuerpo sobre el que está definido V.