Diseño de una prótesis de mano adaptable para niños
76
Trabajo de Final de Grado Ingeniería en Tecnologías Industriales Diseño de una prótesis de mano adaptable para niños MEMÓRIA Autor: Marta Ayats Soler Director: Raúl Suarez Convocatória: Abril 2017
Transcript of Diseño de una prótesis de mano adaptable para niños

Trabajo de Final de Grado
Ingenieriacutea en Tecnologiacuteas Industriales
Disentildeo de una proacutetesis de mano
adaptable para nintildeos
MEMOacuteRIA
Autor Marta Ayats Soler
Director Rauacutel Suarez
Convocatoacuteria Abril 2017
Paacutegina 1 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Resumen
En este trabajo se ha realizado el disentildeo de una proacutetesis de mano pediaacutetrica que pueda
adaptarse al crecimiento del usuario desde que este utiliza su primera mano mioeleacutectrica hasta
que este ha crecido lo suficiente como para utilizar manos proteacutesicas de adulto
Para hacerlo primero se ha realizado un estudio de la mano humana incluyendo en este estudio
la anatomiacutea de la mano los movimientos baacutesicos de esta y la antropometriacutea estudio a partir del
cual se obtuvieron las medidas a las que tendriacutea que poder adaptarse la futura proacutetesis
A continuacioacuten se hizo un estudio del estado del arte incluyendo en este la historia de las
primeras proacutetesis donde pudimos ver las necesidades a cubrir por las cuales se empezaron a
disentildear las proacutetesis tanto esteacuteticas como mecaacutenicas A parte de la historia se realizoacute un estudio
del mercado actual tanto de proacutetesis para adultos como de proacutetesis pediaacutetricas asiacute se pudo ver
que necesidades no estaacuten actualmente cubiertas en el mercado
Una vez se teniacutea la informacioacuten sobre las medidas que teniacutea que tener la proacutetesis y las
necesidades que esta teniacutea que cumplir se empezoacute el disentildeo de esta Este disentildeo seraacute un disentildeo
modular tendraacute unas partes fijas y unas partes que se podraacuten antildeadir a la proacutetesis en funcioacuten de
lo que necesite el usuario Todas las partes se han disentildeado con SolidWorks y para comprobar
el funcionamiento del mecanismo de flexioacuten y extensioacuten de los dedos se ha realizado un
prototipo con impresioacuten 3D cuyas fotos se encuentran en la memoria
Una vez finalizado el disentildeo se ha hecho un estudio de los materiales actuadores y bateriacuteas
maacutes utilizados para la fabricacioacuten de proacutetesis de mano escogiendo entre las opciones
encontradas el material los actuadores i la bateriacutea que tendriacutea que tener la proacutetesis disentildeada
para cumplir las necesidades del paciente
Finalmente es importante comentar que en el trabajo no se ha hecho el control automaacutetico de
la proacutetesis i la instalacioacuten electroacutenica sino que el objetivo principal del trabajo era el disentildeo
modular
Paacutegina 2 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Paacutegina 3 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Iacutendice
Resumen 1
Iacutendice 3
1 Introduccioacuten 6
11 Objetivo 6
12 Origen del proyecto y motivaciones 6
2 Estudio de la mano humana 8
21 Anatomiacutea 8
211 Partes de la mano humana 8
212 Estructura muscular 8
213 Estructura oacutesea 9
214 Articulaciones 9
22 Movimientos articulatorios 10
221 Movimientos de muntildeeca 10
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar 11
223 Movimientos de articulaciones metacarpofalaacutengicas 11
224 Movimientos de articulaciones interfalaacutengicas 12
23 Movimientos coordinados baacutesicos 13
231 Prensioacuten en pinza 13
232 Agarre ciliacutendrico 14
233 Agarre de gancho 14
24 Antropometriacutea 15
3 Estado del arte 24
31 Historia 24
32 Clasificacioacuten general de las proacutetesis actuales 26
33 Prestaciones de las proacutetesis de mano actuales 28
34 Materiales usados en la fabricacioacuten de proacutetesis 29
35 Mecanismos de accionamiento 30
351 Mecanismo de barras 30
353 Mecanismo de transmisioacuten por poleas 30
354 Mecanismo de accionamiento basado en tendones 31
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo 32
36 Actuadores 33
Paacutegina 4 Disentildeo de una proacutetesis de mano adaptable para nintildeos
37 Estudio del mercado actual 34
371 Proacutetesis comerciales para adultos 35
372 Proacutetesis pediaacutetricas comerciales 36
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente 40
4 Disentildeo 41
41 Introduccioacuten y objetivos del disentildeo 41
42 Disentildeo de la estructura exterior 41
421 Medidas antropomeacutetricas 42
422 Disentildeo de la palma 42
423 Disentildeo de los dedos 47
43 Disentildeo del mecanismo de movimiento 50
431 Disentildeo del soporte para el mecanismo de movimiento 50
432 Mecanismo de movimiento 51
433 Caacutelculos 53
44 Eleccioacuten de los actuadores sensores y bateriacuteas 58
441 Actuadores 58
442 Bateriacuteas 59
443 Sensores 60
444 Conclusiones 61
45 Materiales 61
451 Aluminio 61
452 Fibra de carbono 62
453 Titanio 62
454 Nylamid 63
455 Poliacutemero ABS 63
456 Orthocarbonio 64
457 Material compuesto de fibra de carbono i kevlar 64
458 Eleccioacuten del material 65
46 Costes de fabricacioacuten 66
47 Resumen del disentildeo realizado 67
6 Presupuesto 71
51 Coste de las horas trabajadas 71
52 Coste de licencias y materiales 71
53 Presupuesto total 71
Conclusiones 72
Paacutegina 5 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos 73
Bibliografiacutea 74
Paacutegina 6 Disentildeo de una proacutetesis de mano adaptable para nintildeos
1 Introduccioacuten
11 Objetivo Este trabajo de final de grado en Ingenieriacutea en Tecnologiacuteas Industriales se titula ldquoDisentildeo de una
proacutetesis de mano adaptable para nintildeosrdquo y estaacute hecho en colaboracioacuten con el Instituto de
Organizacioacuten y Control de Sistemas Industriales de la Universidad Politeacutecnica de Cataluntildea (UPC)
El objetivo del trabajo es el disentildeo de una proacutetesis de mano que se adapte al crecimiento del
paciente de los 6 a los 20 antildeos
12 Origen del proyecto y motivaciones La Asociacioacuten Nacional de Amputados Adampi [1] calcula que en 2002 habiacutea en Espantildea un total
de 46886 personas con amputaciones Un 14 de estas tienen una deficiencia de miembro
superior desde el nacimiento esto significa que en 2002 habiacutea 8845 personas con la necesidad
de llevar proacutetesis toda la vida Otro dato importante a destacar es que a parte de las personas
con una amputacioacuten congeacutenita habiacutea en el momento del estudio 4514 menores de 14 antildeos
con una amputacioacuten ya sea congeacutenita o adquirida
La doctora Marisa Cabrera actual jefa de seccioacuten del servicio de Cirugiacutea Ortopeacutedica del Hospital
de Sant Joan de Deacuteu creoacute en el antildeo 2000 la Unidad del Nintildeo y el Adolescente Amputado con la
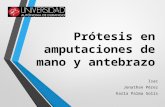
finalidad de ayudar a las familias del paciente amputado Actualmente tratan 299 pacientes
cuyas amputaciones vienen dadas en un 77 de los pacientes por razones congeacutenitas en un
10 de los pacientes por cusas seacutepticas en un 75 de los pacientes por razones oncoloacutegicas y
en un 51 de los pacientes por razones traumatoloacutegicas [2] (Veacutease Figura 21)
230
30
2315
Congeacutenitas Seacutepticas Oncoloacutegicas Traumatoloacutegicas
Figura 21 Graacutefica de las causas de amputaciones en la Unidad del Nintildeo y el Adolescente Amputado
Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 1 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Resumen
En este trabajo se ha realizado el disentildeo de una proacutetesis de mano pediaacutetrica que pueda
adaptarse al crecimiento del usuario desde que este utiliza su primera mano mioeleacutectrica hasta
que este ha crecido lo suficiente como para utilizar manos proteacutesicas de adulto
Para hacerlo primero se ha realizado un estudio de la mano humana incluyendo en este estudio
la anatomiacutea de la mano los movimientos baacutesicos de esta y la antropometriacutea estudio a partir del
cual se obtuvieron las medidas a las que tendriacutea que poder adaptarse la futura proacutetesis
A continuacioacuten se hizo un estudio del estado del arte incluyendo en este la historia de las
primeras proacutetesis donde pudimos ver las necesidades a cubrir por las cuales se empezaron a
disentildear las proacutetesis tanto esteacuteticas como mecaacutenicas A parte de la historia se realizoacute un estudio
del mercado actual tanto de proacutetesis para adultos como de proacutetesis pediaacutetricas asiacute se pudo ver
que necesidades no estaacuten actualmente cubiertas en el mercado
Una vez se teniacutea la informacioacuten sobre las medidas que teniacutea que tener la proacutetesis y las
necesidades que esta teniacutea que cumplir se empezoacute el disentildeo de esta Este disentildeo seraacute un disentildeo
modular tendraacute unas partes fijas y unas partes que se podraacuten antildeadir a la proacutetesis en funcioacuten de
lo que necesite el usuario Todas las partes se han disentildeado con SolidWorks y para comprobar
el funcionamiento del mecanismo de flexioacuten y extensioacuten de los dedos se ha realizado un
prototipo con impresioacuten 3D cuyas fotos se encuentran en la memoria
Una vez finalizado el disentildeo se ha hecho un estudio de los materiales actuadores y bateriacuteas
maacutes utilizados para la fabricacioacuten de proacutetesis de mano escogiendo entre las opciones
encontradas el material los actuadores i la bateriacutea que tendriacutea que tener la proacutetesis disentildeada
para cumplir las necesidades del paciente
Finalmente es importante comentar que en el trabajo no se ha hecho el control automaacutetico de
la proacutetesis i la instalacioacuten electroacutenica sino que el objetivo principal del trabajo era el disentildeo
modular
Paacutegina 2 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Paacutegina 3 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Iacutendice
Resumen 1
Iacutendice 3
1 Introduccioacuten 6
11 Objetivo 6
12 Origen del proyecto y motivaciones 6
2 Estudio de la mano humana 8
21 Anatomiacutea 8
211 Partes de la mano humana 8
212 Estructura muscular 8
213 Estructura oacutesea 9
214 Articulaciones 9
22 Movimientos articulatorios 10
221 Movimientos de muntildeeca 10
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar 11
223 Movimientos de articulaciones metacarpofalaacutengicas 11
224 Movimientos de articulaciones interfalaacutengicas 12
23 Movimientos coordinados baacutesicos 13
231 Prensioacuten en pinza 13
232 Agarre ciliacutendrico 14
233 Agarre de gancho 14
24 Antropometriacutea 15
3 Estado del arte 24
31 Historia 24
32 Clasificacioacuten general de las proacutetesis actuales 26
33 Prestaciones de las proacutetesis de mano actuales 28
34 Materiales usados en la fabricacioacuten de proacutetesis 29
35 Mecanismos de accionamiento 30
351 Mecanismo de barras 30
353 Mecanismo de transmisioacuten por poleas 30
354 Mecanismo de accionamiento basado en tendones 31
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo 32
36 Actuadores 33
Paacutegina 4 Disentildeo de una proacutetesis de mano adaptable para nintildeos
37 Estudio del mercado actual 34
371 Proacutetesis comerciales para adultos 35
372 Proacutetesis pediaacutetricas comerciales 36
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente 40
4 Disentildeo 41
41 Introduccioacuten y objetivos del disentildeo 41
42 Disentildeo de la estructura exterior 41
421 Medidas antropomeacutetricas 42
422 Disentildeo de la palma 42
423 Disentildeo de los dedos 47
43 Disentildeo del mecanismo de movimiento 50
431 Disentildeo del soporte para el mecanismo de movimiento 50
432 Mecanismo de movimiento 51
433 Caacutelculos 53
44 Eleccioacuten de los actuadores sensores y bateriacuteas 58
441 Actuadores 58
442 Bateriacuteas 59
443 Sensores 60
444 Conclusiones 61
45 Materiales 61
451 Aluminio 61
452 Fibra de carbono 62
453 Titanio 62
454 Nylamid 63
455 Poliacutemero ABS 63
456 Orthocarbonio 64
457 Material compuesto de fibra de carbono i kevlar 64
458 Eleccioacuten del material 65
46 Costes de fabricacioacuten 66
47 Resumen del disentildeo realizado 67
6 Presupuesto 71
51 Coste de las horas trabajadas 71
52 Coste de licencias y materiales 71
53 Presupuesto total 71
Conclusiones 72
Paacutegina 5 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos 73
Bibliografiacutea 74
Paacutegina 6 Disentildeo de una proacutetesis de mano adaptable para nintildeos
1 Introduccioacuten
11 Objetivo Este trabajo de final de grado en Ingenieriacutea en Tecnologiacuteas Industriales se titula ldquoDisentildeo de una
proacutetesis de mano adaptable para nintildeosrdquo y estaacute hecho en colaboracioacuten con el Instituto de
Organizacioacuten y Control de Sistemas Industriales de la Universidad Politeacutecnica de Cataluntildea (UPC)
El objetivo del trabajo es el disentildeo de una proacutetesis de mano que se adapte al crecimiento del
paciente de los 6 a los 20 antildeos
12 Origen del proyecto y motivaciones La Asociacioacuten Nacional de Amputados Adampi [1] calcula que en 2002 habiacutea en Espantildea un total
de 46886 personas con amputaciones Un 14 de estas tienen una deficiencia de miembro
superior desde el nacimiento esto significa que en 2002 habiacutea 8845 personas con la necesidad
de llevar proacutetesis toda la vida Otro dato importante a destacar es que a parte de las personas
con una amputacioacuten congeacutenita habiacutea en el momento del estudio 4514 menores de 14 antildeos
con una amputacioacuten ya sea congeacutenita o adquirida
La doctora Marisa Cabrera actual jefa de seccioacuten del servicio de Cirugiacutea Ortopeacutedica del Hospital
de Sant Joan de Deacuteu creoacute en el antildeo 2000 la Unidad del Nintildeo y el Adolescente Amputado con la
finalidad de ayudar a las familias del paciente amputado Actualmente tratan 299 pacientes
cuyas amputaciones vienen dadas en un 77 de los pacientes por razones congeacutenitas en un
10 de los pacientes por cusas seacutepticas en un 75 de los pacientes por razones oncoloacutegicas y
en un 51 de los pacientes por razones traumatoloacutegicas [2] (Veacutease Figura 21)
230
30
2315
Congeacutenitas Seacutepticas Oncoloacutegicas Traumatoloacutegicas
Figura 21 Graacutefica de las causas de amputaciones en la Unidad del Nintildeo y el Adolescente Amputado
Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 2 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Paacutegina 3 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Iacutendice
Resumen 1
Iacutendice 3
1 Introduccioacuten 6
11 Objetivo 6
12 Origen del proyecto y motivaciones 6
2 Estudio de la mano humana 8
21 Anatomiacutea 8
211 Partes de la mano humana 8
212 Estructura muscular 8
213 Estructura oacutesea 9
214 Articulaciones 9
22 Movimientos articulatorios 10
221 Movimientos de muntildeeca 10
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar 11
223 Movimientos de articulaciones metacarpofalaacutengicas 11
224 Movimientos de articulaciones interfalaacutengicas 12
23 Movimientos coordinados baacutesicos 13
231 Prensioacuten en pinza 13
232 Agarre ciliacutendrico 14
233 Agarre de gancho 14
24 Antropometriacutea 15
3 Estado del arte 24
31 Historia 24
32 Clasificacioacuten general de las proacutetesis actuales 26
33 Prestaciones de las proacutetesis de mano actuales 28
34 Materiales usados en la fabricacioacuten de proacutetesis 29
35 Mecanismos de accionamiento 30
351 Mecanismo de barras 30
353 Mecanismo de transmisioacuten por poleas 30
354 Mecanismo de accionamiento basado en tendones 31
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo 32
36 Actuadores 33
Paacutegina 4 Disentildeo de una proacutetesis de mano adaptable para nintildeos
37 Estudio del mercado actual 34
371 Proacutetesis comerciales para adultos 35
372 Proacutetesis pediaacutetricas comerciales 36
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente 40
4 Disentildeo 41
41 Introduccioacuten y objetivos del disentildeo 41
42 Disentildeo de la estructura exterior 41
421 Medidas antropomeacutetricas 42
422 Disentildeo de la palma 42
423 Disentildeo de los dedos 47
43 Disentildeo del mecanismo de movimiento 50
431 Disentildeo del soporte para el mecanismo de movimiento 50
432 Mecanismo de movimiento 51
433 Caacutelculos 53
44 Eleccioacuten de los actuadores sensores y bateriacuteas 58
441 Actuadores 58
442 Bateriacuteas 59
443 Sensores 60
444 Conclusiones 61
45 Materiales 61
451 Aluminio 61
452 Fibra de carbono 62
453 Titanio 62
454 Nylamid 63
455 Poliacutemero ABS 63
456 Orthocarbonio 64
457 Material compuesto de fibra de carbono i kevlar 64
458 Eleccioacuten del material 65
46 Costes de fabricacioacuten 66
47 Resumen del disentildeo realizado 67
6 Presupuesto 71
51 Coste de las horas trabajadas 71
52 Coste de licencias y materiales 71
53 Presupuesto total 71
Conclusiones 72
Paacutegina 5 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos 73
Bibliografiacutea 74
Paacutegina 6 Disentildeo de una proacutetesis de mano adaptable para nintildeos
1 Introduccioacuten
11 Objetivo Este trabajo de final de grado en Ingenieriacutea en Tecnologiacuteas Industriales se titula ldquoDisentildeo de una
proacutetesis de mano adaptable para nintildeosrdquo y estaacute hecho en colaboracioacuten con el Instituto de
Organizacioacuten y Control de Sistemas Industriales de la Universidad Politeacutecnica de Cataluntildea (UPC)
El objetivo del trabajo es el disentildeo de una proacutetesis de mano que se adapte al crecimiento del
paciente de los 6 a los 20 antildeos
12 Origen del proyecto y motivaciones La Asociacioacuten Nacional de Amputados Adampi [1] calcula que en 2002 habiacutea en Espantildea un total
de 46886 personas con amputaciones Un 14 de estas tienen una deficiencia de miembro
superior desde el nacimiento esto significa que en 2002 habiacutea 8845 personas con la necesidad
de llevar proacutetesis toda la vida Otro dato importante a destacar es que a parte de las personas
con una amputacioacuten congeacutenita habiacutea en el momento del estudio 4514 menores de 14 antildeos
con una amputacioacuten ya sea congeacutenita o adquirida
La doctora Marisa Cabrera actual jefa de seccioacuten del servicio de Cirugiacutea Ortopeacutedica del Hospital
de Sant Joan de Deacuteu creoacute en el antildeo 2000 la Unidad del Nintildeo y el Adolescente Amputado con la
finalidad de ayudar a las familias del paciente amputado Actualmente tratan 299 pacientes
cuyas amputaciones vienen dadas en un 77 de los pacientes por razones congeacutenitas en un
10 de los pacientes por cusas seacutepticas en un 75 de los pacientes por razones oncoloacutegicas y
en un 51 de los pacientes por razones traumatoloacutegicas [2] (Veacutease Figura 21)
230
30
2315
Congeacutenitas Seacutepticas Oncoloacutegicas Traumatoloacutegicas
Figura 21 Graacutefica de las causas de amputaciones en la Unidad del Nintildeo y el Adolescente Amputado
Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 3 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Iacutendice
Resumen 1
Iacutendice 3
1 Introduccioacuten 6
11 Objetivo 6
12 Origen del proyecto y motivaciones 6
2 Estudio de la mano humana 8
21 Anatomiacutea 8
211 Partes de la mano humana 8
212 Estructura muscular 8
213 Estructura oacutesea 9
214 Articulaciones 9
22 Movimientos articulatorios 10
221 Movimientos de muntildeeca 10
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar 11
223 Movimientos de articulaciones metacarpofalaacutengicas 11
224 Movimientos de articulaciones interfalaacutengicas 12
23 Movimientos coordinados baacutesicos 13
231 Prensioacuten en pinza 13
232 Agarre ciliacutendrico 14
233 Agarre de gancho 14
24 Antropometriacutea 15
3 Estado del arte 24
31 Historia 24
32 Clasificacioacuten general de las proacutetesis actuales 26
33 Prestaciones de las proacutetesis de mano actuales 28
34 Materiales usados en la fabricacioacuten de proacutetesis 29
35 Mecanismos de accionamiento 30
351 Mecanismo de barras 30
353 Mecanismo de transmisioacuten por poleas 30
354 Mecanismo de accionamiento basado en tendones 31
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo 32
36 Actuadores 33
Paacutegina 4 Disentildeo de una proacutetesis de mano adaptable para nintildeos
37 Estudio del mercado actual 34
371 Proacutetesis comerciales para adultos 35
372 Proacutetesis pediaacutetricas comerciales 36
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente 40
4 Disentildeo 41
41 Introduccioacuten y objetivos del disentildeo 41
42 Disentildeo de la estructura exterior 41
421 Medidas antropomeacutetricas 42
422 Disentildeo de la palma 42
423 Disentildeo de los dedos 47
43 Disentildeo del mecanismo de movimiento 50
431 Disentildeo del soporte para el mecanismo de movimiento 50
432 Mecanismo de movimiento 51
433 Caacutelculos 53
44 Eleccioacuten de los actuadores sensores y bateriacuteas 58
441 Actuadores 58
442 Bateriacuteas 59
443 Sensores 60
444 Conclusiones 61
45 Materiales 61
451 Aluminio 61
452 Fibra de carbono 62
453 Titanio 62
454 Nylamid 63
455 Poliacutemero ABS 63
456 Orthocarbonio 64
457 Material compuesto de fibra de carbono i kevlar 64
458 Eleccioacuten del material 65
46 Costes de fabricacioacuten 66
47 Resumen del disentildeo realizado 67
6 Presupuesto 71
51 Coste de las horas trabajadas 71
52 Coste de licencias y materiales 71
53 Presupuesto total 71
Conclusiones 72
Paacutegina 5 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos 73
Bibliografiacutea 74
Paacutegina 6 Disentildeo de una proacutetesis de mano adaptable para nintildeos
1 Introduccioacuten
11 Objetivo Este trabajo de final de grado en Ingenieriacutea en Tecnologiacuteas Industriales se titula ldquoDisentildeo de una
proacutetesis de mano adaptable para nintildeosrdquo y estaacute hecho en colaboracioacuten con el Instituto de
Organizacioacuten y Control de Sistemas Industriales de la Universidad Politeacutecnica de Cataluntildea (UPC)
El objetivo del trabajo es el disentildeo de una proacutetesis de mano que se adapte al crecimiento del
paciente de los 6 a los 20 antildeos
12 Origen del proyecto y motivaciones La Asociacioacuten Nacional de Amputados Adampi [1] calcula que en 2002 habiacutea en Espantildea un total
de 46886 personas con amputaciones Un 14 de estas tienen una deficiencia de miembro
superior desde el nacimiento esto significa que en 2002 habiacutea 8845 personas con la necesidad
de llevar proacutetesis toda la vida Otro dato importante a destacar es que a parte de las personas
con una amputacioacuten congeacutenita habiacutea en el momento del estudio 4514 menores de 14 antildeos
con una amputacioacuten ya sea congeacutenita o adquirida
La doctora Marisa Cabrera actual jefa de seccioacuten del servicio de Cirugiacutea Ortopeacutedica del Hospital
de Sant Joan de Deacuteu creoacute en el antildeo 2000 la Unidad del Nintildeo y el Adolescente Amputado con la
finalidad de ayudar a las familias del paciente amputado Actualmente tratan 299 pacientes
cuyas amputaciones vienen dadas en un 77 de los pacientes por razones congeacutenitas en un
10 de los pacientes por cusas seacutepticas en un 75 de los pacientes por razones oncoloacutegicas y
en un 51 de los pacientes por razones traumatoloacutegicas [2] (Veacutease Figura 21)
230
30
2315
Congeacutenitas Seacutepticas Oncoloacutegicas Traumatoloacutegicas
Figura 21 Graacutefica de las causas de amputaciones en la Unidad del Nintildeo y el Adolescente Amputado
Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 4 Disentildeo de una proacutetesis de mano adaptable para nintildeos
37 Estudio del mercado actual 34
371 Proacutetesis comerciales para adultos 35
372 Proacutetesis pediaacutetricas comerciales 36
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente 40
4 Disentildeo 41
41 Introduccioacuten y objetivos del disentildeo 41
42 Disentildeo de la estructura exterior 41
421 Medidas antropomeacutetricas 42
422 Disentildeo de la palma 42
423 Disentildeo de los dedos 47
43 Disentildeo del mecanismo de movimiento 50
431 Disentildeo del soporte para el mecanismo de movimiento 50
432 Mecanismo de movimiento 51
433 Caacutelculos 53
44 Eleccioacuten de los actuadores sensores y bateriacuteas 58
441 Actuadores 58
442 Bateriacuteas 59
443 Sensores 60
444 Conclusiones 61
45 Materiales 61
451 Aluminio 61
452 Fibra de carbono 62
453 Titanio 62
454 Nylamid 63
455 Poliacutemero ABS 63
456 Orthocarbonio 64
457 Material compuesto de fibra de carbono i kevlar 64
458 Eleccioacuten del material 65
46 Costes de fabricacioacuten 66
47 Resumen del disentildeo realizado 67
6 Presupuesto 71
51 Coste de las horas trabajadas 71
52 Coste de licencias y materiales 71
53 Presupuesto total 71
Conclusiones 72
Paacutegina 5 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos 73
Bibliografiacutea 74
Paacutegina 6 Disentildeo de una proacutetesis de mano adaptable para nintildeos
1 Introduccioacuten
11 Objetivo Este trabajo de final de grado en Ingenieriacutea en Tecnologiacuteas Industriales se titula ldquoDisentildeo de una
proacutetesis de mano adaptable para nintildeosrdquo y estaacute hecho en colaboracioacuten con el Instituto de
Organizacioacuten y Control de Sistemas Industriales de la Universidad Politeacutecnica de Cataluntildea (UPC)
El objetivo del trabajo es el disentildeo de una proacutetesis de mano que se adapte al crecimiento del
paciente de los 6 a los 20 antildeos
12 Origen del proyecto y motivaciones La Asociacioacuten Nacional de Amputados Adampi [1] calcula que en 2002 habiacutea en Espantildea un total
de 46886 personas con amputaciones Un 14 de estas tienen una deficiencia de miembro
superior desde el nacimiento esto significa que en 2002 habiacutea 8845 personas con la necesidad
de llevar proacutetesis toda la vida Otro dato importante a destacar es que a parte de las personas
con una amputacioacuten congeacutenita habiacutea en el momento del estudio 4514 menores de 14 antildeos
con una amputacioacuten ya sea congeacutenita o adquirida
La doctora Marisa Cabrera actual jefa de seccioacuten del servicio de Cirugiacutea Ortopeacutedica del Hospital
de Sant Joan de Deacuteu creoacute en el antildeo 2000 la Unidad del Nintildeo y el Adolescente Amputado con la
finalidad de ayudar a las familias del paciente amputado Actualmente tratan 299 pacientes
cuyas amputaciones vienen dadas en un 77 de los pacientes por razones congeacutenitas en un
10 de los pacientes por cusas seacutepticas en un 75 de los pacientes por razones oncoloacutegicas y
en un 51 de los pacientes por razones traumatoloacutegicas [2] (Veacutease Figura 21)
230
30
2315
Congeacutenitas Seacutepticas Oncoloacutegicas Traumatoloacutegicas
Figura 21 Graacutefica de las causas de amputaciones en la Unidad del Nintildeo y el Adolescente Amputado
Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 5 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos 73
Bibliografiacutea 74
Paacutegina 6 Disentildeo de una proacutetesis de mano adaptable para nintildeos
1 Introduccioacuten
11 Objetivo Este trabajo de final de grado en Ingenieriacutea en Tecnologiacuteas Industriales se titula ldquoDisentildeo de una
proacutetesis de mano adaptable para nintildeosrdquo y estaacute hecho en colaboracioacuten con el Instituto de
Organizacioacuten y Control de Sistemas Industriales de la Universidad Politeacutecnica de Cataluntildea (UPC)
El objetivo del trabajo es el disentildeo de una proacutetesis de mano que se adapte al crecimiento del
paciente de los 6 a los 20 antildeos
12 Origen del proyecto y motivaciones La Asociacioacuten Nacional de Amputados Adampi [1] calcula que en 2002 habiacutea en Espantildea un total
de 46886 personas con amputaciones Un 14 de estas tienen una deficiencia de miembro
superior desde el nacimiento esto significa que en 2002 habiacutea 8845 personas con la necesidad
de llevar proacutetesis toda la vida Otro dato importante a destacar es que a parte de las personas
con una amputacioacuten congeacutenita habiacutea en el momento del estudio 4514 menores de 14 antildeos
con una amputacioacuten ya sea congeacutenita o adquirida
La doctora Marisa Cabrera actual jefa de seccioacuten del servicio de Cirugiacutea Ortopeacutedica del Hospital
de Sant Joan de Deacuteu creoacute en el antildeo 2000 la Unidad del Nintildeo y el Adolescente Amputado con la
finalidad de ayudar a las familias del paciente amputado Actualmente tratan 299 pacientes
cuyas amputaciones vienen dadas en un 77 de los pacientes por razones congeacutenitas en un
10 de los pacientes por cusas seacutepticas en un 75 de los pacientes por razones oncoloacutegicas y
en un 51 de los pacientes por razones traumatoloacutegicas [2] (Veacutease Figura 21)
230
30
2315
Congeacutenitas Seacutepticas Oncoloacutegicas Traumatoloacutegicas
Figura 21 Graacutefica de las causas de amputaciones en la Unidad del Nintildeo y el Adolescente Amputado
Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 6 Disentildeo de una proacutetesis de mano adaptable para nintildeos
1 Introduccioacuten
11 Objetivo Este trabajo de final de grado en Ingenieriacutea en Tecnologiacuteas Industriales se titula ldquoDisentildeo de una
proacutetesis de mano adaptable para nintildeosrdquo y estaacute hecho en colaboracioacuten con el Instituto de
Organizacioacuten y Control de Sistemas Industriales de la Universidad Politeacutecnica de Cataluntildea (UPC)
El objetivo del trabajo es el disentildeo de una proacutetesis de mano que se adapte al crecimiento del
paciente de los 6 a los 20 antildeos
12 Origen del proyecto y motivaciones La Asociacioacuten Nacional de Amputados Adampi [1] calcula que en 2002 habiacutea en Espantildea un total
de 46886 personas con amputaciones Un 14 de estas tienen una deficiencia de miembro
superior desde el nacimiento esto significa que en 2002 habiacutea 8845 personas con la necesidad
de llevar proacutetesis toda la vida Otro dato importante a destacar es que a parte de las personas
con una amputacioacuten congeacutenita habiacutea en el momento del estudio 4514 menores de 14 antildeos
con una amputacioacuten ya sea congeacutenita o adquirida
La doctora Marisa Cabrera actual jefa de seccioacuten del servicio de Cirugiacutea Ortopeacutedica del Hospital
de Sant Joan de Deacuteu creoacute en el antildeo 2000 la Unidad del Nintildeo y el Adolescente Amputado con la
finalidad de ayudar a las familias del paciente amputado Actualmente tratan 299 pacientes
cuyas amputaciones vienen dadas en un 77 de los pacientes por razones congeacutenitas en un
10 de los pacientes por cusas seacutepticas en un 75 de los pacientes por razones oncoloacutegicas y
en un 51 de los pacientes por razones traumatoloacutegicas [2] (Veacutease Figura 21)
230
30
2315
Congeacutenitas Seacutepticas Oncoloacutegicas Traumatoloacutegicas
Figura 21 Graacutefica de las causas de amputaciones en la Unidad del Nintildeo y el Adolescente Amputado
Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 7 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Sea cual sea el motivo los meacutedicos optan por substituir de inmediato la zona amputada con
alguacuten tipo de proacutetesis Antes de cumplir los 2 meses de vida los pequentildeos que han nacido sin
extremidad son derivados a un especialista que definiraacute que tipo de proacutetesis cosmeacutetica ha de
ser colocada al bebeacute La doctora Marisa Cabrera cirujana ortopeacutedica del Hospital Sant Joan de
Deacuteu afirma en un artiacuteculo realizado por El Perioacutedico [3] que si un nintildeo que nace sin antebrazo
alcanza los tres meses de vida sin este miembro fijaraacute en su cerebro una idea de bimanualidad
(Concepto de igual longitud de los dos brazos) distorsionada Para evitarlo los bebeacutes que
carecen de una mano son ensentildeados desde pequentildeos a hacer uso de una mano estaacutetica que les
ayudaraacute a incorporar en su cerebro que sus dos brazos son igual de largos
Antes de cumplir los 2 antildeos la mano cosmeacutetica es substituida por una proacutetesis que permite
coger objetos pinzando con tres dedos ficticios el anular iacutendice y corazoacuten El nivel de
complejidad de la proacutetesis se va aumentando a medida que el paciente aprende como se utiliza
la proacutetesis A los 7 antildeos el paciente empieza a utilizar proacutetesis de mano con movimiento de
rotacioacuten en la muntildeeca Finalmente a los 13-14 antildeos el paciente empieza a utilizar la proacutetesis de
mano para adultos
Las proacutetesis mioeleacutectricas maacutes avanzadas del mercado tienen un precio que oscila entre 36000
y 40000 euros y la seguridad social aporta unos 10000 euros en el caso de los nintildeos y unos
18000 euros en el caso de los adultos afirma el teacutecnico ortopeacutedico de la Unidad Integral de
Atencioacuten al Nintildeo Amputado David Lloberas en un artiacuteculo por el perioacutedico europapress [4]
Ademaacutes estas proacutetesis no se fabrican a medida sino que los fabricantes fabrican unas medidas
determinadas que actualmente no se pueden adaptar al uso para nintildeos o adolescentes
Uno de los problemas que actualmente existen en el mercado de proacutetesis para nintildeos es que
estos crecen sus cuerpos cambian y las proacutetesis se quedan pequentildeas pero aunque los maacutes
pequentildeos experimentan muchos cambios fiacutesicos en periodos de tiempo muy cortos es una
equivocacioacuten reemplazar la proacutetesis cada varios meses ya que el nintildeo necesita un tiempo para
adaptarse a su nueva proacutetesis Pero iquestqueacute pasariacutea si existiera una proacutetesis que pudiera adaptarse
al crecimiento del nintildeo
De esta pregunta nace la motivacioacuten del trabajo ya que la respuesta es una mejora significativa
de la vida del paciente en dos grandes teacuterminos principalmente el paciente no tiene la
necesidad de adaptarse a una nueva proacutetesis cuando experimenta un cambio en su cuerpo ya
que puede utilizar la misma en toda su etapa de crecimiento y en segundo lugar el hecho de
poder utilizar una misma proacutetesis durante este periodo de tiempo implica un grande ahorro
econoacutemico para el usuario de esta
Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 8 Disentildeo de una proacutetesis de mano adaptable para nintildeos
2 Estudio de la mano humana La mano es una parte del cuerpo humano que comprende desde la muntildeeca hasta la punta de
los dedos y estaacute unida al antebrazo Es el principal oacutergano de manipulacioacuten fiacutesica del medio y la
principal fuente de informacioacuten taacutectil sobre el entorno ya que la punta de los dedos es una de
las zonas con maacutes terminaciones nerviosas del cuerpo
En este capiacutetulo se realizaraacute un estudio de la mano humana incluyendo en el estudio la
anatomiacutea los movimientos articulatorios y movimientos coordinados baacutesicos de la mano y
finalmente un estudio antropomeacutetrico de las medidas de la mano en nintildeos desde 6 antildeos hasta
la edad adulta
Al final del capiacutetulo se pretende tener unas especificaciones para el disentildeo de la proacutetesis ya sean
esteacuteticas o mecaacutenicas
21 Anatomiacutea
211 Partes de la mano humana
La mano humana consta de tres partes principales
Muntildeeca Es la parte que la une con el antebrazo y estaacute formada por los huesos
carpianos
Palma Es la parte central de la mano y estaacute formada por los huesos metacarpianos
Los dedos La mano humana tiene cinco dedos llamados pulgar iacutendice corazoacuten anular
y mentildeique numerados respectivamente del 1 al 5 (Veacutease Figura 2111) Son la parte
final de la mano y estaacuten formados por las falanges proximal medial y distal
212 Estructura muscular
La mano humana cuenta con 15 articulaciones y en sus movimientos participan 40 muacutesculos
En el antebrazo nacen muacutesculos alargados cuyos tendones llegan a la mano
Algunos de estos son flexores otros extensores pronadores (giran la parte inferior de la palma
hacia dentro) supinadores (giran la parte inferior de la palma hacia fuera) y abductores
(muacutesculos del pulgar) [5]
Figura2111 Dedos de la mano
1 Pulgar
2 Iacutendice
3 Corazoacuten
4 Anular
5 Mentildeique
Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 9 Disentildeo de una proacutetesis de mano adaptable para nintildeos
213 Estructura oacutesea
La mano humana se compone de 27 huesos divididos en tres grupos 8 huesos carpianos 5
huesos metacarpianos y 14 falanges
Los huesos carpianos estaacuten divididos en 2 grupos de 4 un grupo estaacute en contacto con el
antebrazo y encajan en una pequentildea cavidad formada por los huesos del antebrazo y el radio
El otro grupo estaacute en contacto con los huesos metacarpianos Los huesos del primer grupo son
el escafoides el semilunar el piramidal y el pisiforme y los del segundo grupo son el trapecio el
trapezoide el grande y el ganchoso
Los metacarpianos forman el esqueleto de la palma y son 5 huesos largos Las bases de todos
los metacarpianos se articulan con los huesos del carpo y las cabezas de estos se articulan con
las falanges proximales de los dedos
Cada dedo estaacute compuesto por tres falanges distal intermedia y proximal excepto el dedo
pulgar que solo tiene dos falanges distal y proximal [5]
214 Articulaciones
Articulacioacuten de la muntildeeca La articulacioacuten de la muntildeeca es una articulacioacuten sinovial
(Veacutease Figura 141) un tipo de articulacioacuten que presenta un espacio entre los huesos
que se articulan llamado cavidad sinovial que segrega un liacutequido llamado liacutequido
sinovial para evitar fricciones entre huesos [5] Esta articulacioacuten permite movimientos
en dos ejes es decir puede abducir aducir flexionar y extender (Consultar Apartado
21
Figura2221 Musculatura de la mano [5]
Figura 2331 Estructura oacutesea de la mano
Huesos carpianos 1 Trapecio 2 Trapezoide 3 Grande 4 Ganchoso 5 Pisiforme 6 Piramidal 7 Semilunar 8 Escafoides
Huesos carpianos
Huesos metacarpianos
Falange proximal
Falanges intermedias
Falange distal
Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 10 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Articulacioacuten trapezometacarpiana del pulgar Es la articulacioacuten entre el hueso
metacarpiano del pulgar y el trapecio (Veacutease Figura 2142) Anatoacutemica y
mecaacutenicamente es una articulacioacuten con dos ejes llamada articulacioacuten de silla de montar
Articulaciones metacarpofalaacutengicas Es la articulacioacuten entre el hueso metacarpiano y las
falanges proximales de los dedos Se llaman articulaciones condileas que permiten
flexioacuten extensioacuten abduccioacuten aduccioacuten circunduccioacuten y una rotacioacuten limitada Estas
articulaciones estaacuten reforzadas por el ligamento palmar y los ligamentos colaterales
Articulaciones interfalaacutengicas Son las articulaciones entre la falange proximal y la
falange media y entre la falange media y la distal excepto en el dedo pulgar que solo
tiene una articulacioacuten interfalaacutengica entre la falange proximal y distal (Veacutease Figura
2143)
22 Movimientos articulatorios En este apartado se muestran los arcos de movilidad de las distintas articulaciones de la mano
Los arcos de movilidad de las articulaciones determinan los grados que una articulacioacuten puede
moverse sin sufrir alguna lesioacuten Asiacute se limitaraacute el movimiento del prototipo de proacutetesis y se
definiraacuten los movimientos que ha de realizar
221 Movimientos de muntildeeca
Como se ha comentado anteriormente la muntildeeca gracias al tipo de articulacioacuten que la forma
tiene movimiento en dos ejes Respecto a un eje efectuacutea los movimientos de extensioacuten y flexioacuten
y respecto a otro los movimientos de desviacioacuten cubital y radial (Veacutease Figura 211)
Los liacutemites de movimiento son como puede verse en la figura anterior 90 para la extensioacuten 90
para la flexioacuten 30 para la desviacioacuten cubital y 20 para la desviacioacuten radial [7]
Figura 2441 Articulacioacuten muntildeeca Figura 2543 Articulaciones metacarpofalaacutengicas y interfalaacutengicas
Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 11 Disentildeo de una proacutetesis de mano adaptable para nintildeos
222 Movimientos de la articulacioacuten trapezometacarpiana del pulgar
La articulacioacuten trapezometacarpiana del pulgar como se ha comentado en el Apartado 14 de
este capiacutetulo tiene 2 ejes de movimiento que le permiten efectuar 4 movimientos flexioacuten y
extensioacuten abduccioacuten y aduccioacuten
Los liacutemites de movimiento son en el caso de la extensioacuten 90 y en el caso de la abduccioacuten de 70
(Veacutease Figura 2221) Siendo la flexioacuten y la aduccioacuten los movimientos contrarios a los
comentados anteriormente [8]
223 Movimientos de articulaciones metacarpofalaacutengicas
En las articulaciones metacarpofalaacutengicas es importante diferenciar entre el pulgar y los otros
dedos ya que los movimientos son distintos
La articulacioacuten metacarpofalaacutengica del pulgar le permite efectuar un movimiento de flexioacuten y
extensioacuten con un liacutemite de movimiento de 50 para la flexioacuten (Veacutease Figura 2231) y un liacutemite
de movimiento de extensioacuten ente 0 y 40 en funcioacuten de la persona [6]
Figura 2211 Movimientos de muntildeeca [7]
Figura 2221 A la izquierda movimiento de extensioacuten a la derecha movimiento de abduccioacuten de la articulacioacuten trapezometacarpiana [8]
Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 12 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En algunas personas la articulacioacuten metacarpofalaacutengica del pulgar permite un movimiento de
abduccioacuten con hasta 20 de movimiento
Los dedos del 2 al 5 pueden efectuar los mismos movimientos que el dedo pulgar pero con
liacutemites distintos Los liacutemites de movimiento son de 30 a 45 en extensioacuten 90 en flexioacuten (Veacutease
figura 2232) y 20 en abduccioacuten (Veacutease figura 2233)
224 Movimientos de articulaciones interfalaacutengicas
Las articulaciones interfalaacutengicas pueden efectuar 2 movimientos flexioacuten y extensioacuten
La articulacioacuten entre la falange proximal y la media tiene una capacidad de flexioacuten de 100
aproximadamente mientras que la articulacioacuten entre las falanges media y distal puede
extenderse 10 y flexionarse 90 respecto a la posicioacuten de referencia mostrada en la Figura
2241
En el caso del dedo pulgar este tiene una sola articulacioacuten interfalaacutengica entre la falange
proximal y distal con una capacidad de flexioacuten entre 80 y 90 y una capacidad de extensioacuten
entre 15 y 20 (Veacutease figura 2242)
Figura 2232 Limites de movimiento articulacioacuten metacarpofalaacutengica en flexioacuten y extensioacuten [8]
Figura 2233 Limites de movimiento articulacioacuten metacarpofalaacutengica en abduccioacuten
[8]
Figura 2231 liacutemite de movimiento de flexioacuten en articulacioacuten metacarpofalaacutengica del pulgar [8]
Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 13 Disentildeo de una proacutetesis de mano adaptable para nintildeos
23 Movimientos coordinados baacutesicos La cantidad de muacutesculos y articulaciones de las manos permiten una gran variedad de
movimientos de agarre En 1919 Schlesinger desarrolloacute una clasificacioacuten de los posibles
movimientos de agarre de la mano humana
Este estudio agrupa en cinco categoriacuteas los distintos tipos de agarre Ciliacutendrico de punta de
gancho de palma esfeacuterico y de lado (Veacutease figura 231)
De entre estos los principales que la proacutetesis deberaacute poder realizar se comentan a continuacioacuten
231 Prensioacuten en pinza
Esta forma prensil puede efectuarse de dos formas Con la accioacuten conjunta del dedo pulgar
iacutendice y medio o bien con la accioacuten solamente del pulgar y el iacutendice Para realizar la prensioacuten en
pinza el dedo pulgar y los dedos iacutendice y medio han de encontrarse en oposicioacuten es decir el
dedo pulgar ha de efectuar primero un movimiento de abduccioacuten y seguidamente los dedos
iacutendice y medio efectuacutean un movimientos de flexioacuten hasta encontrarse con el objeto que se desea
agarrar Se utiliza principalmente para sujetar objetos pequentildeos asiacute como una aguja o una
moneda En la Figura 2311 se muestra el procedimiento de prensioacuten en pinza
Figura 2241 Flexioacuten y extensioacuten de las falanges distal y media Figura 2242 Flexioacuten y extensioacuten de la articulacioacuten
interfalaacutengical del pulgar
Figura 231 Movimientos de agarre a) Cilindrico b) de punta c) de gancho d) de palma e) esfeacuterico f) de lado [9]
Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017

Paacutegina 14 Disentildeo de una proacutetesis de mano adaptable para nintildeos
232 Agarre ciliacutendrico
Para hacer un agarre ciliacutendrico se utiliza la palma de la mano como plano prensil y los dedos de
esta tendraacuten la funcioacuten de mantener el objeto junto a la palma Para hacerlo el dedo pulgar ha
de hacer un movimiento de abduccioacuten para posicionarse en un plano distinto al de la palma
seguidamente el objeto se posiciona entre el dedo pulgar y la palma y finalmente los dedos de
la mano desde el pulgar hasta el mentildeique se flexionan hasta entrar en contacto con el objeto a
agarrar En la Figura 2321 se muestra el procedimiento de agarre ciliacutendrico
233 Agarre de gancho
En este tipo de agarre la mano se encuentra colgando actuando como instrumento portador
Para efectuar este tipo de agarre el dedo pulgar no actuacutea solo lo hacen los dedos 2 al 5 que se
flexionan alrededor del objeto a agarrar En la Figura 2331 se muestra el procedimiento de
agarre de gancho
Figura 2311 Procedimiento de prensioacuten en pinza De Izquierda a derecha 1) Posicioacuten natural de la mano 2) Movimiento de abduccioacuten del pulgar 3) Prensioacuten en pinza
Figura 2321 Procedimiento de agarre ciliacutendrico De izquierda a derecha 1) Posicioacuten natural de la mano 2 y 3) miexclMovimiento de abduccioacuten del pulgar 4) Agarre cilindrico
Figura 2331 Procedimiento de agarre de gancho De izquierda a derecha 1) Posicioacuten natural de la mano 2) Flexioacuten de los dedos 2 al 5 3) Agarre de gancho
Paacutegina 15 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Asiacute finalmente se puede concluir que los movimientos que ha de poder hacer la proacutetesis de
mano para que esta pueda hacer los movimientos de agarre y prensioacuten baacutesicos son
- Movimiento de abduccioacuten y aduccioacuten del pulgar
- Movimiento de flexioacuten del pulgar
- Movimiento de flexioacuten de los dedos del Iacutendice al Mentildeique
24 Antropometriacutea En este apartado se muestran las medidas necesarias para el disentildeo de una proacutetesis de una
mano mediana desde los 6 antildeos hasta la edad adulta El estudio antropomoacuterfico en nintildeos que
se presente sigue un estudio efectuado en 1977 por la universidad de Michigan [10] donde se
estudioacute la antropometriacutea de nintildeos de los 3 a los 19 antildeos En el caso del estudio antropomoacuterfico
en adultos se ha hecho seguacuten [11]
Las medidas que se han considerado importantes para el disentildeo son Ancho del mentildeique ancho
del dedo anular ancho del dedo corazoacuten ancho del dedo iacutendice ancho del pulgar largo del
dedo mentildeique largo del anular largo del dedo corazoacuten largo del dedo iacutendice largo del pulgar
longitud de las falanges largo de la palma largo total de la mano grosor de la mano ancho de
la palma excluyendo el pulgar ancho de la mano incluyendo el pulgar y periacutemetro de la muntildeeca
(Veacutease Figuras 241 242 y 243)
Figura 241 Medidas estudiadas de la mano Largo de los dedos ancho de los dedos largo de la palma y largo
de la mano[11]
Figura 242 Medidas estudiadas de la mano Ancho del pulgar y ancho de la mano[11]
Paacutegina 16 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para organizar los resultados del estudio se han elaborado unas tablas con las medidas
antropomeacutetricas obtenidas diferenciando entre hombres y mujeres
En las Tablas 241 y 242 se encuentran las medidas de la anchura de los dedos en nintildeos de 6 a
17 antildeos y en la edad adulta separando las medidas obtenidas en hombres (Tabla 241) de las
obtenidas en mujeres (Tabla 242) Es importante comentar que esta medida se ha realizado
como se puede ver en la Figura 241 mesurando la base del dedo es decir la parte del dedo
que estaacute en contacto con la articulacioacuten metacarpofalaacutengica
En las Tablas 243 y 244 se encuentran las medidas del largo de los dedos separando como
en el caso anterior las medidas obtenidas en hombres (Tabla 243) de las obtenidas en mujeres
(Tabla 244) En la Figura 241 puede verse que se considera largo del dedo desde la base de
este hasta la punta
A continuacioacuten en la Tabla 245 se muestra el estudio efectuado por Garrett [12] donde se
detalla la relacioacuten en longitud que existe entre las falanges de los dedos con respecto a la
longitud total de la mano (en )
En las Tablas 246 y 247 se encuentran varias medidas de la palma de la mano y de a mano en
general estas medidas son El largo de la palma entendiendo esta medida desde la muntildeeca
hasta la articulacioacuten metacarpofalaacutengica del dedo iacutendice (Veacutease Figura 241) el largo de la
mano entendiendo esta medida desde la muntildeeca hasta la punta del dedo corazoacuten (Veacutease Figura
241) el grosor de la mano(Veacutease Figura 242) en ancho de la palma entendiendo esta medida
como la parte maacutes ancha de la palma sin incluir el dedo pulgar (Veacutease Figura 243) y el ancho
de la mano siendo esta medida la parte maacutes ancha de la mano incluyendo el dedo pulgar (Veacutease
Figura 243) En esta parte del estudio tambieacuten se han diferenciado las medidas encontrada en
hombres (Tabla 246) de las encontradas en mujeres (Tabla 247)
Finalmente en la Tabla 248 se encuentra la medida del periacutemetro de la muntildeeca
Figura 243 Medidas estudiadas de la mano Periacutemetro de la muntildeeca ancho de la mano incluyendo el pulgar y ancho de la
mano excluyendo el pulgar [11]
Paacutegina 17 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 241 Anchura dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 11 12 12 15
7-8 09 11 12 12 15
8-9 09 11 12 12 16
9-10 10 12 13 13 16
10-11 10 12 13 13 16
11-12 11 13 14 13 17
12-13 11 13 14 14 18
13-14 11 13 14 15 19
14-15 12 14 15 15 19
15-16 13 14 16 16 20
16-17 13 15 16 16 21
Adultos 17 20 21 21 23
Maacuteximo 18 21 23 23 25
Miacutenimo 08 10 10 10 13
Paacutegina 18 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 242 Anchura dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 09 10 11 11 14
7-8 10 10 12 11 15
8-9 10 10 12 12 15
9-10 10 11 12 12 15
10-11 10 11 13 12 16
11-12 10 11 13 13 16
12-13 11 12 13 13 17
13-14 11 12 14 13 17
14-15 12 12 14 14 17
15-16 12 13 14 14 18
16-17 12 13 14 14 18
Adultos 15 16 18 15 19
Maacuteximo 17 18 20 20 21
Miacutenimo 08 09 10 10 13
Paacutegina 19 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 243 Largo dedos en hombres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 43 54 58 53 47
7-8 55 55 59 53 47
8-9 57 57 62 56 50
9-10 60 60 65 59 53
10-11 62 62 67 60 55
11-12 64 64 69 63 57
12-13 67 67 73 65 60
13-14 70 70 76 69 62
14-15 74 74 80 72 66
15-16 76 76 82 73 66
16-17 76 76 81 74 68
Adultos 62 77 83 75 67
Maacuteximo 70 86 92 83 76
Miacutenimo 44 45 47 46 38
Paacutegina 20 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 245 Relacioacuten de longitud de las falanges con respecto a la longitud de la mano entera ()
Proximal Media Distal
Pulgar 171 - 121
Indice 218 141 86
Corazoacuten 245 158 98
Anular 222 153 97
Mentildeique 172 108 86
Tabla 244 Largo de los dedos en mujeres (en cm)
Mentildeique Anular Corazoacuten Iacutendice Pulgar
6-7 44 55 58 52 47
7-8 45 55 58 54 48
8-9 46 58 62 56 50
9-10 48 62 65 59 54
10-11 51 65 68 62 56
11-12 53 67 71 65 57
12-13 55 69 73 67 59
13-14 56 70 74 68 59
14-15 56 71 75 69 61
15-16 57 71 75 69 62
16-17 57 71 74 67 62
Adultos 58 73 77 69 60
Maacuteximo 66 80 85 78 69
Miacutenimo 36 45 48 45 41
Paacutegina 21 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 246 Medidas de la palma en hombres(en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 75 133 25 63 69
7-8 79 138 25 65 71
8-9 81 143 25 67 72
9-10 84 149 26 70 74
10-11 87 154 26 72 79
11-12 91 160 26 74 79
12-13 94 167 26 78 84
13-14 101 177 26 83 88
14-15 102 182 27 85 95
15-16 102 184 26 88 96
16-17 104 185 27 88 102
Adultos 109 186 28 85 107
Maacuteximo 125 216 32 93 116
Miacutenimo 64 111 24 54 55
Paacutegina 22 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 247 Medidas de la palma en mujeres (en cm)
Largo
palma
Largo
mano
Grosor
mano
Ancho
palma
Ancho
mano
6-7 73 131 21 60 66
7-8 78 136 21 63 67
8-9 8 142 21 65 69
9-10 84 149 22 67 71
10-11 88 156 23 70 73
11-12 91 162 23 72 76
12-13 96 169 23 75 78
13-14 95 169 24 75 80
14-15 97 172 24 75 80
15-16 96 171 25 76 80
16-17 97 171 25 76 80
Adultos 100 174 26 80 92
Maacuteximo 108 190 31 85 101
Miacutenimo 67 115 21 52 55
Paacutegina 23 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 248 Periacutemetro de la muntildeeca (en cm)
Hombres Mujeres
6-7 124 124
7-8 127 130
8-9 131 133
9-10 135 135
10-11 134 136
11-12 143 141
12-13 147 145
13-14 157 148
14-15 167 151
15-16 166 152
16-17 172 152
Adultos 176 160
Maacuteximo 210 177
Miacutenimo 109 104
Paacutegina 24 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3 Estado del arte
31 Historia En la antiguumledad solamente se podiacutea sobrevivir con la ayuda de las manos ya que con estas se
serviacutean los alimentos o se empuntildeaban armas para luchar contra los enemigos Es por esto que
la primera proacutetesis de mano data del antildeo 2000 antes de cristo Se trata de una proacutetesis inmoacutevil
fabricada de madera y piel y estaba sujetada al antebrazo mediante un arneacutes que se adaptaba
al paciente
Con el manejo del hierro el hombre pudo construir manos maacutes resistentes y que podiacutean ser
utilizadas para transportar objetos pesados Asiacute Marcus Sergius durante la Segunda Guerra
Puacutenica (218-202 aC) se fabricoacute la primera mano de hierro registrada cuya funcioacuten era
exclusivamente portar su espada
En 1400 se fabricoacute la mano Alt-Ruppin (Veacutease Figura 311) construida tambieacuten de hierro Esta
mano constaba de un pulgar riacutegido y dedos flexibles los cuales se flexionaban manualmente y
se podiacutean fijar mediante un mecanismo de trinquete Esta mano ademaacutes teniacutea una muntildeeca
movible
En el siglo XVI el disentildeo del mecanismo de las proacutetesis se mejora considerablemente gracias al
meacutedico Pareacute Ambroise que desarrolla la primera proacutetesis artificial moacutevil a nivel de codo llamada
Le Petit Lorrain (Veacutease Figura 312) Los dedos de esta mano podiacutean abrirse y cerrarse y teniacutea
una palanca por medio de la cual el codo podiacutea realizar flexioacuten y extensioacuten Este mismo meacutedico
disentildeoacute la primera mano esteacutetica de cuero impulsado asiacute la utilizacioacuten de nuevos materiales para
el disentildeo de este tipo de proacutetesis
Figura 311 Proacutetesis de mano de Alt-Ruppin
Figura 312 Proacutetesis de mano Le Petit Lorrain
Paacutegina 25 Disentildeo de una proacutetesis de mano adaptable para nintildeos
En el siglo XIX ya se emplean materiales como el cuero los poliacutemeros naturales y la madera para
la fabricacioacuten de proacutetesis de miembro superior
Entre las innovaciones maacutes importantes respecto a mecanismos de accionamiento destaca el
disentildeo de mano de Peter Beil Este disentildeo destaca por ser el primer disentildeo de mano que tiene
cierre y apertura controlada por los movimientos del tronco y hombro
Ya en el siglo XX el meacutedico franceacutes Gripoulleau consigue cumplir el objetivo de que los
amputados puedan regresar a su vida laboral Esto lo consigue con el disentildeo de accesorios como
ganchos anillos y varios instrumentos metaacutelicos que podiacutean usarse para este objetivo dando al
paciente la capacidad de realizar trabajos de fuerza o precisioacuten
En el antildeo 1912 Dorrance en Estados Unidos desarrollo el Hook una proacutetesis que permite abrir
la mano mediante movimientos de cintura y se cierra pasivamente mediante accioacuten de un
tirante de goma Casi al mismo tiempo se fabricoacute en Alemania el gancho Fischer (Veacutease Figura
313) que ofreciacutea mas diversidad en los tipos de agarre de objetos
El origen de las proacutetesis activas por muacutesculos del muntildeoacuten se da en Alemania gracias a Sauerbruch
el cual mediante varillas de marfil que pasaban por tuacuteneles cutaacuteneos consigue mover la proacutetesis
de forma activa debido a la contraccioacuten muscular
Es en 1946 cuando aparecen las primeras proacutetesis neumaacuteticas y eleacutectricas mediante un sistema
en el que el movimiento es accionado por alguacuten agente externo al cuerpo
Las proacutetesis mioeleacutectricas (Explicadas en el siguiente apartado) aparecen en 1960 en Rusia
En 1962 en Muumlnster Alemania surgieron las primeras proacutetesis de esqueleto ciliacutendrico las cuales
teniacutean un armazoacuten formado por tubos metaacutelicos o de diferentes materiales sinteacuteticos cubiertos
de una sustancia esponjosa para lograr una apariencias maacutes cercana a la de un brazo sano
Actualmente la mayoriacutea de las funciones de las proacutetesis de mano estaacuten limitadas al cierre y
apertura de la pinza la diferencia entre estas radica en el control que emplean pero todas
hacen baacutesicamente las mismas funciones
Figura 313 Proacutetesis de mano Fischer
Paacutegina 26 Disentildeo de una proacutetesis de mano adaptable para nintildeos
32 Clasificacioacuten general de las proacutetesis actuales Actualmente el mercado de proacutetesis de mano se divide en dos grandes grupos las proacutetesis
esteacuteticas o pasivas y las proacutetesis funcionales o activas y estas segundas se clasifican en funcioacuten
del sistema de alimentacioacuten energeacutetica que utiliza para su funcionamiento
Proacutetesis esteacuteticas Son las proacutetesis inmoacuteviles aquellas que solo cubren el aspecto
esteacutetico (Veacutease Figura 321) Son fabricadas usualmente con PVC laacutetex o silicona que
se caracterizan por ser materiales poco pesados Existen teacutecnicas muy avanzadas para
conseguir estas tengan un tacto color y forma lo maacutes parecido posible a la extremidad
real como por ejemplo el escaacutener 3D
Proacutetesis funcionales Las proacutetesis funcionales se diferencian de las estaacuteticas por tener
cierto movimiento que permita suplir las funciones del miembro real Para suplir la parte
esteacutetica existen unos guantes cosmeacuteticos hechos de PVC que simulan el color y la
textura de una mano natural estos se fabrican de 18 diferentes tonalidades Aunque
existen distintos niveles de movimiento todas tienen el mismo objetivo dar al usuario
la posibilidad de tener una vida lo maacutes normal y coacutemoda posible
Seguacuten los mecanismos que se utilizan para transmitir el movimiento del cuerpo a la
mano las proacutetesis funcionales se dividen en 5 grupos
Proacutetesis mecaacutenicas Son dispositivos que tienen la funcioacuten de apertura y cierre
voluntario Este movimiento se consigue por medio de un arneacutes (Veacutease Figura 322) que
se sujeta al hombro o al muntildeoacuten en funcioacuten del nivel de amputacioacuten El funcionamiento
se basa en la tensioacuten y relajacioacuten de un musculo determinado que provoca la extensioacuten
de una liga por medio del arneacutes que provoca el cierre o la apertura de la proacutetesis Es
importante notar que este tipo de mecanismo solo puede efectuar un solo movimiento
(apertura y cierre de la mano) cosa que significa que todos los dedos se mueven al
mismo nivel y de forma dependiente
Figura 321 Ejemplo proacutetesis de mano esteacutetica
Paacutegina 27 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis eleacutectricas Estas proacutetesis utilizan motores eleacutectricos con una bateriacutea recargable
(Veacutease Figura 323) Pueden ser controlados de varias formas ya sea con servo control
con botoacuten o con interruptor en arneacutes o en ciertas ocasiones se puede usar una
combinacioacuten de estas Para lograr la sujecioacuten se usa un socket que es un dispositivo
intermedio entre la proacutetesis y el muntildeoacuten que permite la sujecioacuten de la proacutetesis por
succioacuten Los problemas principales que presentan estos tipos de proacutetesis son el precio
el peso y la imposibilidad de estar en contacto con un medio huacutemedo
Proacutetesis neumaacuteticas Estas proacutetesis son accionadas por aacutecido carboacutenico comprimido
que proporciona una gran cantidad de energiacutea El inconveniente principal es el riesgo
del uso de aacutecido carboacutenico
Proacutetesis mioeleacutectricas Las proacutetesis mioeacutectricas (Veacutease Figura 324) con proacutetesis
eleacutectricas controladas por medio de un poder externo mioeleacutectrico Este se basa en el
concepto de que siempre que un muacutesculo en el cuerpo se contrae o se flexiona se
produce una sentildeal eleacutectrica (EMG) Esta sentildeal es muy pequentildea (5 a 20 microV) Para detectar
esta sentildeal se usan electrodos y una vez detectara se amplifica y procesa por un
controlador controla los motores de accionamiento del movimiento La ventaja principal
de estas proacutetesis es que solo requiere que el usuario flexione sus muacutesculos para operarla
a diferencia de las proacutetesis controladas por el cuerpo que necesitan un movimiento real
del cuerpo Otra ventaja es que se elimina el arneacutes de suspensioacuten Como desventajas es
importante estacar que al tratarse de un mecanismo complejo estas proacutetesis tienen un
precio elevado y que presentan un sistema de bateriacuteas que requiere un mantenimiento
regular
Figura 322 Proacutetesis mecaacutenica Figura 323 Proacutetesis eleacutectrica
Figura 324 Proacutetesis mioeleacutectrica
Paacutegina 28 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Proacutetesis hibridas Una proacutetesis hibrida combina la accioacuten de cuerpo con el
accionamiento por electricidad en una sola proacutetesis En su mayoriacutea las proacutetesis hibridas
sirven para paciente que tienen amputaciones por arriba del codo Asiacute el movimiento
del codo se acciona con un sistema mecaacutenico y el movimiento de la mano con u sistema
mioeleacutectrico por ejemplo
33 Prestaciones de las proacutetesis de mano actuales En el disentildeo de proacutetesis de mano podemos definir dos tipos de grados de libertad los DoM y los
DoF Los DoM son los grados de libertad e indican la cantidad de articulaciones accionadas por
un actuado mientras que las DoF son el nuacutemero de articulaciones que tiene la proacutetesis
Cuando en un mecanismo hay menos actuadores que articulaciones se dice que el mecanismo
estaacute subactuado Por otro lado aunque menos comuacuten cuando un mecanismo tiene maacutes
actuadores que articulaciones se llama un sistema sobreactuado Este segundo concepto es
menos tiacutepico el en disentildeo de proacutetesis en el cual se opta maacutes por sistemas subactuados ya que
se consiguen movimientos similares con precio y peso inferior Sin embargo un alto grado de
subactuacioacuten puede generar peacuterdida de precisioacuten y control de los movimientos
Se ha podido comprobar que los fabricantes de proacutetesis de mano optan por disentildear proacutetesis
subactuadas es decir con menos actuadores que articulaciones Como puede verse en la Tabla
331 las proacutetesis Sensor Hand de OttoBock Vincent Hand I-Limb de Touch Bionics Limb Pulse
de Touch Bionics Bebionic de RSL Steeper y Michelangelo de OttoBock son ejemplos de proacutetesis
subactuadas que actualmente se encuentran en el mercado
Tabla 331 Ejemplos de proacutetesis subactuadas
Nombre Numero de articulaciones Numero de actuadores
Sensor Hand 2 1
I-limb 11 5
Bebionic 11 5
Michelangelo 6 2
Vincent Hand 11 6
Con respecto a los movimientos que realizan estas proacutetesis es importante diferenciar entre
proacutetesis de mano para adultos y proacutetesis de mano para nintildeos
Como se ha explicado anteriormente las personas que nacen con la falta de una extremidad
superior siguen un procedimiento de adaptacioacuten a las proacutetesis Este procedimiento consiste
mayoritariamente en tres etapas distinguidas seguacuten la edad del paciente Inicialmente se le pone
al paciente una proacutetesis estaacutetica en la segunda etapa se le pone al paciente una proacutetesis
mioeleacutectrica con un solo movimiento de pinza y finalmente se le pone al paciente una proacutetesis
con dos movimientos de pinza y de rotacioacuten de la muntildeeca
En conclusioacuten las proacutetesis de mano maacutes utilizadas son
Paacutegina 29 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Movimiento de pinza
Movimiento de pinza y rotacioacuten de muntildeeca
Los movimientos de pinza comentados anteriormente pueden ser efectuados por todos los
dedos de la mano es decir los dedos 2 al 5 en oposicioacuten con el dedo pulgar o bien con el dedo
iacutendice y medio en oposicioacuten con el pulgar o uacutenicamente con el dedo iacutendice en oposicioacuten con el
pulgar
34 Materiales usados en la fabricacioacuten de proacutetesis 341 Laminado de plaacutesticos
Los tipos comunes de laminado de plaacutestico usados en proteacutesica son el acriacutelico el epoxi y el
polieacutester La ventaja del laminado de plaacutestico es que el fabricante tiene el control sobre la
resistencia rigidez y grosor del producto en todas las zonas de la proacutetesis
342 Materiales termoplaacutesticos
Las laacuteminas termoplaacutesticas son muy usadas en el campo de la proteacutesica para fabricar conexiones
y componentes estructurales Los tipos maacutes baacutesicos son el polipropileno (PP) y el polietileno
(PE) El PP es un material muy riacutegido con el cual suele fabricarse el soporte de las conexiones
mientras que el PE es un material de baja densidad con el cual se fabrican normalmente las
conexiones Una de las ventajas de estos materiales es que se pueden remodelar utilizando una
pistola de aire caliente esto es una gran ventaja cuando existe alguna zona de presioacuten en el
encaje de la proacutetesis
Ademaacutes del PP i el PE tambieacuten se utilizan combinaciones de materiales termoplaacutesticos variando
las caracteriacutesticas de rigidez y flexibilidad junto con la densidad
343 Silicona y materia les similares
La silicona principalmente se usa como material de relleno y es el material preferido para la
construccioacuten de proacutetesis de miembro superior esteacuteticas
Otro uso importante de la silicona es como material de conexioacuten entre la proacutetesis i el miembro
ofreciendo un relleno complementario en las zonas criacuteticas para evitar rozamientos
Otros materiales que actuacutean de manera similar a la silicona son el uretano y el gel de aceite
mineral
344 Metales
Los metales maacutes usados en la fabricacioacuten de proacutetesis son el aluminio el acero inoxidable y el
titanio
Paacutegina 30 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El acero es un material muy resistente pero tambieacuten pesado Puesto que se trata de un material
duro se usa para fabricar pequentildeos componentes que necesitan maacutes resistencia El aluminio
se considera una alternativa maacutes ligera del acero No es tan resistente pero es lo
suficientemente resistente como para cumplir los requisitos del disentildeo Finalmente el titanio es
una alternativa resistente i ligera pero con un precio elevado
345 Acabado cosmeacutetico
Las proacutetesis en general suelen estar recubiertas de un material de espuma para que tengan la
misma forma y textura que la extremidad sana Las fundas de espuma estaacuten disponibles en
poliuretano y polietileno
Para la funda exterior el material maacutes utilizado es la funda de nailon aunque recientemente
existen en el mercado pieles proteacutesicas de laacutetex hechas a medida que imitan la piel del paciente
ofreciendo un acabado maacutes natural
35 Mecanismos de accionamiento En este apartado se muestran los principales mecanismos de accionamiento usados
actualmente para el movimiento de los dedos de la mano
351 Mecanismo de barras
Consiste en la transmisioacuten de movimientos a las falanges instalando barras conectadas a estas
en una configuracioacuten adecuada asiacute se elimina la necesidad de un motor por articulacioacuten
En el disentildeo de proacutetesis de mano no se usa un solo mecanismo de barras sino que se utilizan un
conjunto de mecanismos de 4 barras para conseguir el movimiento de los dedos
El problema principal de este tipo de mecanismo es que limita el movimiento ya que la flexioacuten
se produce al mismo momento en las tres articulaciones
Un ejemplo del uso de este mecanismo es la TMB Hand desarrollada en la universidad de
Toronto [13] (Veacutease Figura 3511)
352 Mecanismo con motor en cada articulacioacuten
Consiste en poner motores pequentildeos en cada una de las articulaciones rotacionales Esto implica
un aumento del precio y del peso del mecanismo por lo que es maacutes utilizado en manos roboacuteticas
que en proacutetesis de mano
353 Mecanismo de transmisioacuten por poleas
Uno de los sistemas maacutes antiguos y utilizados en el campo de las proacutetesis para el movimiento de
flexioacuten y extensioacuten de los dedos es mediante el uso de cables y poleas En la mayoriacutea de casos
las poleas estaacuten ubicadas en las articulaciones y sobre ellas pasa un cable que estaacute fijado por
uno de los extremos en una falange (generalmente en la falange distal) y el otro extremo del
cable estaacute fijado en el actuador Cuando se aplica una carga del sistema de actuacioacuten al cable
Paacutegina 31 Disentildeo de una proacutetesis de mano adaptable para nintildeos
este uacuteltimo se desliza por la polea y mueve la falange Un ejemplo de esta clase de transmisioacuten
es el usado en la patente US 20100259057 [14](Veacutease Figura 3531)
354 Mecanismo de accionamiento basado en tendones
Sistema que se basa en los tendones Consta de un solo motor por dedo o de un
solo motor que mueve todos los dedos Para flexionar las falanges el sistema consta de un cable
que pasa a lo largo de estas (puede ser por el interior de ellas mediante conductos realizados
para esta funcioacuten o bien por el exterior mediante fundas similares a las utilizadas en sistemas de
frenos de una bicicleta convencional) este cable ha de ser la suficientemente resistente como
para que cuando el motor tire de eacutel sea capaz de flexionar todos los dedos y suportar la fuerza
ejercida sobre un objeto para agarrarlo
Con este sistema se soluciona la flexioacuten de las falanges pero no la extensioacuten de estas Las
soluciones que se han observado en distintos modelos de proacutetesis son
El uso de un sistema de muelles colocados en las articulaciones Este sistema puede
estar construido con muelles de retorno (Veacutease Figura 541) o bien con muelles de
escape (Veacutease Figura 3542)
Figura 542 Sistema basado en tendones con muelles de escape en articulaciones (Universidad de Bologna)
Figura 3531 Sistema basado en poleas y correas [14]
Figura 3511 Mecanismo de barras de la proacutetesis de mano TMB hand [13]
Figura 541 Sistema basado en tendones con muelles de retorno en articulaciones
Paacutegina 32 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El uso de dos cables uno para la flexioacuten y otro para la extensioacuten El problema de este
sistema es que por le general se necesitan dos actuadores uno para cada cable que
implica como desventaja la necesidad de maacutes actuadores Un ejemplo de este sistema
es el prototipo de mano creado por la universidad de Victoria [15] (Veacutease Figura 3513)
El disentildeo de una pieza que actuacutea como articulacioacuten y estaacute fabricada con un material
elastomeacuterico asegurando asiacute que la articulacioacuten recupera su forma inicial al cesar la
fuerza ejercida por el cable Un ejemplo de este meacutetodo es la proacutetesis de mano fabricada
por Steve Wood (Veacutease Figura 544) Esta proacutetesis estaacute imprimida con impresoras 3D
con un material elaacutestico que permite flexionar i estirar los dedos de la mano
El recubrimiento de la parte exterior del dedo con una tira elaacutestica (Veacutease Figura
3545)
355 Mecanismo de transmisioacuten ldquoDogleg Linkrdquo
Se trata de un mecanismo de transmisioacuten formado por eslabones interconectados entre siacute
mediante un conjunto de tendones que variacutean la fuerza ejercida en cada dedo en funcioacuten de la
forma del objeto que se esteacute agarrando (Veacutease Figura 3551)
Asiacute se consigue un movimiento independiente de cada uno de los cinco dedos con un solo
actuador siendo capaz de agarrar objetos con geometriacuteas complejas
Figura 545 Sistema basado en tendones con material elaacutestico en la parte superior
Figura 544 Sistema basado en tendones con articulaciones fabricadas con material elaacutestico
Figura 3543 Sistema basado en tendones con un cable para extensioacuten (imagen izquierda) y un cable para la flexioacuten (imagen derecha) [15]
Paacutegina 33 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Cuando el tendoacuten empieza a aplicar una fuerza T los cinco dedos inician su movimiento a la vez
Una vez las falanges de los dedos toman contacto con el elemento a agarrar se detiene el
movimiento de los dedos iniciaacutendose la rotacioacuten de los eslabones que permitiraacuten a los dedos
cuyas falanges no estaacuten en contacto con el objeto seguir movieacutendose hasta conseguirlo
36 Actuadores En este apartado se ha realizado un estudio de los tipos de actuadores que se utilizan para la
construccioacuten de proacutetesis de mano en la actualidad Para hacerlo se han seleccionado distintas
proacutetesis de mano y se ha analizado el tipo de actuador utilizado Las proacutetesis que se han
seleccionado son tanto proacutetesis comerciales como proacutetesis de estudio
Es importante comentar que no se ha encontrado informacioacuten especifica de los actuadores que
utilizan las proacutetesis de mano maacutes comercializadas actualmente como las fabricadas por las
empresas Ottobock o Touch Bionichs es por esto que se han considerado para el estudio
proacutetesis de marcas menos conocidas cuya informacioacuten sobre los actuadores estaba disponible
En la Tabla 361 se muestra el nombre de las proacutetesis analizadas junto con el actuador que esta
utiliza
Figura 3551 Esquema de funcionamiento del sistema ldquoDogleg Linkrdquo
Paacutegina 34 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como puede verse en la tabla anterior el tipo de actuador maacutes utilizado son claramente motores
DC o tambieacuten llamados motores de corriente continua Los hay de diferentes tamantildeos formas
y potencias pero todos se basan en el mismo principio de funcionamiento
Los motores de corriente continua estaacuten formados por dos piezas fundamentales el rotor y el
estator El rotor es la parte moacutevil del motor y proporciona el par para mover la carga mientras
que el estator es la parte fija de la maacutequina cuya funcioacuten es subministrar el flujo magneacutetico que
seraacute usado por el bobinado del rotor para realizar el movimiento giratorio El estator estaacute
formado por el suporte el imaacuten permanente y las escobillas En la Figura 61 se muestra un
esquema del motor
37 Estudio del mercado actual Para poder tener una referencia de la cantidad de proacutetesis pediaacutetricas que hay actualmente en
el mercado se ha hecho un estudio comparativo de las proacutetesis para adultos y las pediaacutetricas
En este apartado se describiraacuten las distintas proacutetesis para adultos que se venden actualmente y
posteriormente las proacutetesis pediaacutetricas que se pueden encontrar en el mercado y finalmente se
haraacute una comparativa
Tabla 361 Proacutetesis de mano y actuadores utilizados
Smart Motor Hand Motor DC
Milano Hand Motor DC
Harada Hand Motor DC
MechaTE Hand Motor DC
MAC Hand Servomotor con accionamiento lineal
Maeno Hand Aleacioacuten con memoria de forma
Keio Hand Motor ultrasoacutenico rotativo
SKKU Hand II Motor DC
NAIST Hand I Motor DC
BeBionic Hand I Motor DC
SPRING Hand Motor DC
Figura 361 Esquema de la estructura del motor de corriente continua
Paacutegina 35 Disentildeo de una proacutetesis de mano adaptable para nintildeos
371 Proacutetesis comerciales para adultos
1) Proacutetesis de mano Michelangelo de Ottobock La proacutetesis de mano Michelangelo de Ottobock
[16] (Veacutease Figura 3711) es una proacutetesis mioeleacutectrica con capacidad para dos movimientos
rotacioacuten de muntildeeca y agarre en pinza Tiene un peso de 420 g y una velocidad de apertura e 325
mms Puede ejercer fuerzas de hasta 70 N y tiene una apertura de 120 mm
La ventaja de esta proacutetesis es que la empresa ha fabricado varios complementos que facilitan su
uso entre ellos un guante para conseguir una apariencia maacutes real y un complemento en forma
de gancho que se comenta a continuacioacuten
2) Proacutetesis Axonhook de Ottobock La proacutetesis de mano Axonhook de Ottobock (Veacutease Figura
3712) tiene capacidad para un solo movimiento de agarre lateral y estaacute capacitada para
agarres en gancho La principal ventaja de este producto es que tiene un sistema que permite
intercambiarlo con la proacutetesis Michelangelo de la misma compantildeiacutea Es considerada una de las
proacutetesis maacutes precisas y resistentes del mercado y es muy utilizada para trabajos que requieren
de estas cualidades [17]
Esta proacutetesis tiene un peso de 400 g aproximadamente y puede ejercer una fuerza de hasta
120N Su velocidad de cierre es de 173 mms y tiene una apertura maacutexima de 120 mm
3) Proacutetesis de mano Bebionic 3 de Steeper La proacutetesis de mano Bebionic 3 de Steeper (Veacutease
Figura 3713) es una de las proacutetesis maacutes avanzadas del mercado Tiene capacidad para 14
diferentes clases de agarres que se seleccionan mediante una aplicacioacuten Aparte de estos 14
movimientos puede antildeadirse un complemento que permite movimientos de muntildeeca Existen
varias medidas para esta mano aunque no se fabrica de forma personalizada En funcioacuten de la
medida la mano tiene un peso desde 570g hasta 698g y puede efectuar una fuerza de hasta
140N [18]
Figura 3711 Proacutetesis de mano Michelangelo de OttoBock [16] Figura 3712 Proacutetesis de mano Axonhook de
Ottobock [17]
Paacutegina 36 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4) Proacutetesis HACKberry de exii La proacutetesis de mano HACKberry de Exii (Veacutease Figura 3714) ha
sido disentildeada para la impresioacuten 3D La empresa Exii con colaboracioacuten de Wevolver pone a
disponibilidad de cualquier usuario los documentos para imprimir esta proacutetesis aunque si el
paciente lo prefiere la empresa tambieacuten puede fabricarla La principal diferencia de esta proacutetesis
respecto a las comentadas anteriormente es el precio ya que esta proacutetesis puede conseguirse
por 300 doacutelares [19]
5) Proacutetesis I-Limb de Touch Bionics La proacutetesis de mano I-Limb de Touch Bionics (Veacutease Figura
315) es una proacutetesis comercial muy completa tiene un motor para cada dedo cosa que
permite efectuar gran variedad de movimientos que van definidos en un programa de soporte
Este dispositivo pesa entre 405 y 479 gramos tiene un tiempo de cierre de 12 segundos aunque
esta variable puede personalizarse en el programa comentado anteriormente
La diferencia a comentar respecto a las proacutetesis de mano comentadas anteriormente es que
esta proacutetesis incluye un programa no solo para definir las opciones de movimiento sino tambieacuten
para entrenar al paciente y que este pueda adaptarse a la proacutetesis lo antes posible [20]
372 Proacutetesis pediaacutetricas comerciales
1) Proacutetesis 10X de Hosmer La proacutetesis de mano 10X de la empresa Hosmer (Veacutease Figura 3721)
es una proacutetesis en forma de gancho con capacidad para un solo movimiento de pinza Mide 86
cm de largo y pesa 85g Esta proacutetesis se fabrica con aluminio y puede antildeadirse un guante de
laacutetex para conseguir una apariencia maacutes real [21]
2) Proacutetesis 12P de Hosmer La proacutetesis de mano 12P de Hosmer (Veacutease Figura 3722) estaacute
disentildeada expresamente para uso pediaacutetrica y es muy recomendada para la primera vez con una
proacutetesis mioeleacutectrica Mide 7 cm de largo y pesa 85g Se fabrica con acero inoxidable y con un
recubrimiento de plastisol y tiene como complemento un guante de laacutetex con forma de mano
humana [21]
Figura 3713 Proacutetesis Bebionic 3 de Steeper [18]
Figura3714 Proacutetesis HACKberry de Exii [19] Figura 3715 Proacutetesis I-limb de
Tpuch Bionics[20]
Paacutegina 37 Disentildeo de una proacutetesis de mano adaptable para nintildeos
3) UCLA CAPP Terminal Device de Hosmer La proacutetesis de mano UCLA CAPP Terminal Device de
Hosmar (Veacutease Figura 3723) a diferencia de las proacutetesis comentadas anteriormente no tiene
forma de gancho sino que ofrece un cara palmar y no tiene ninguna parte que se asimile al dedo
pulgar de la mano Puede ejercer un solo movimiento de pinza Mide 774cm de largo y pesa 85g
y se fabrica en distintos colores No existe diferencia entre la proacutetesis de mano mara
amputaciones de mano derecha o de mano izquierda sino que esta puede ser usada para ambas
manos [21]
4) Proacutetesis de mano 99P de Hosmer La proacutetesis de mano 99P de hosmer (Veacutease Figura 3724)
es muy parecida a la proacutetesis de mano 12P comentada en este mismo apartado la diferencia
entre estas 2 proacutetesis es la medida ja que esta segunda mide 98 cm de largo y pesa 99 g [21]
5) Proacutetesis de mano Child Dorrance 200 La proacutetesis de mano Child Dorrance 200 de Hosmer
(Veacutease Figura 3725) es una proacutetesis esteacuteticamente parecida a una mano humana Mide 98 cm
de largo y pesa 255g Respecto a los movimientos puede efectuar el movimiento de apertura y
cierre del dedo pulgar junto con los dedos 2 y 3 de forma controlada es decir hace el
movimiento de pinza [22]
Figura 3723 Proacutetesis UCLA CAPP de Hosmer [21] Figura 3724 Proacutetesis 99P de
Hosmer [21]
Figura 3721 Proacutetesis 10X de Hosmer [21] Figura 3722 Proacutetesis 12P de
Hosmer [21]
Paacutegina 38 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6) Proacutetesis de mano Child CAPP de Hosmer La proacutetesis de mano Child CAPP de Hosmer (Veacutease
Figura 3726) es esteacuteticamente parecida a una mano humana y tiene un tacto tambieacuten parecido
a estas Puede efectuar un movimiento de apertura y cierre del pulgar junto con los dedos 2 y 3
como en el caso de la proacutetesis Child Dorrance La diferencia principal entre estas dos proacutetesis
son las medidas La proacutetesis Child CAPP tiene una medida de 84cm y un peso de 161 g [23]
7) Proacutetesis de mano pediaacutetrica 2000 Ottobock La proacutetesis de mano 2000 de Ottobock (Veacutease
Figura 3727) estaacute destinada al uso para nintildeos Para conseguir una apariencia maacutes real puede
complementarse con un guante de laacutetex aunque no es necesario ya que las partes de la proacutetesis
que cumplen la funcioacuten de dedos tienen unas fundas sinteacuteticas El disentildeo de los dedos permite
agarrar herramientas de escritura y cubiertos de forma natural [24] Hay 4 medidas distintas
disponibles para nintildeos de distintas edades entre 18 meses y 13 antildeos Estas medidas son
1) Para nintildeos entre 1 antildeo y medio y 3 antildeos 127 cm con un peso de 86g
2) Para nintildeos entre 3 y 6 antildeos 139 cm con un peso de 115 g
3) Para nintildeos entre 5 y 10 antildeos 152 cm con un peso de 125 g
4) Para nintildeos entre 8 y 13 antildeos 165 cm con un peso de 13 g
8) Proacutetesis de mano pediaacutetrica Ottobock Esta proacutetesis de mano pediaacutetrica (Veacutease Figura 3728)
es una mejora de la proacutetesis 2000 de esta misma marca ya que esta tiene la misma fuerza y
velocidad que otras proacutetesis fabricadas para adultos Solo se fabrica en un tamantildeo de 7 cm de
largo y pesa 350 g [24]
Figura 3725 Proacutetesis Child Dorrance 200 de Hosmer [22]
Figura 3726 Child CAPP de Hosmer [23]
Paacutegina 39 Disentildeo de una proacutetesis de mano adaptable para nintildeos
9) Proacutetesis de mano de Enabling The Future Enabing The Future es una comunidad de personas
cuyo objetivo es permitir a miles de nintildeos fabricar su propia proacutetesis a partir la impresioacuten 3D En
la paacutegina web de la organizacioacuten se pueden encontrar los distintos disentildeos que pueden ser
impresos con impresoras 3D tambieacuten en la paacutegina web se encuentran las instrucciones de
montaje Esta organizacioacuten ofrece 12 productos distintos divididos en tres grupos proacutetesis de
mano proacutetesis de mano y antebrazo excluyendo el codo y proacutetesis de mano y codo Respecto a
las proacutetesis de mano existen 8 disentildeos distintos cuya estructura es muy parecida y se muestra
en la Figura 3729 [25]
Figura 3727 Proacutetesis 2000 de Ottobock[24]
Figura 3728 Proacutetesis de mano pediaacutetrica de Ottobock [24]
Figura 3729 Estructura proacutetesis de mano Enabling the future [25]
Paacutegina 40 Disentildeo de una proacutetesis de mano adaptable para nintildeos
373 Problemas encontrados en las proacutetesis pediaacutetricas descritas anteriormente
En este apartado se quieren describir los problemas que se han visto en las proacutetesis pediaacutetricas
de mano que se han descrito anteriormente para tener presentes estos errores e intentar
solucionarlos en medida de lo posible
El principal problema que presentan estas proacutetesis de mano pediaacutetricas es el movimiento que
esta mano permite La doctora Julita Medina del rehabilitacioacuten de Hospital Sant Joan de Deacuteu
afirma que el principal problema que los nintildeos encuentran a estas proacutetesis es que la obertura
de estas proacutetesis es muy pequentildea y no les permite agarrar objetos tan baacutesicos como un vaso o
el manillar de una bicicleta que para un nintildeo de 10 antildeos es maacutes que un ldquocaprichordquo una
necesidad para adaptarse a las actividades que hacen sus compantildeeros
Este problema no lo encontramos en las proacutetesis de mano de Enabling the Future aunque estas
tienen otras desventajas respecto a las otras proacutetesis comerciales entre estas se encuentra el
hecho de que estaacuten fabricadas con impresioacuten 3D esto es una ventaja en cuanto al precio de
fabricacioacuten y el peso pero una desventaja de esto es que la resistencia que tiene este material
es menor que la resistencia de los materiales con los que se fabrican las otras proacutetesis
A parte de estos problemas encontramos el hecho de que las proacutetesis comerciales se fabrican
con 3 o 4 medidas determinadas Esto hace que todos los nintildeos puedan tener una proacutetesis que
se adapte maacutes o menos a sus medidas pero cada vez que el nintildeo crezca se ha de cambiar de
medida implicando esto un gasto para los familiares que muchas personas no se pueden
permitir
Paacutegina 41 Disentildeo de una proacutetesis de mano adaptable para nintildeos
4 Disentildeo
41 Introduccioacuten y objetivos del disentildeo
Como se ha comentado anteriormente el objetivo de este trabajo es el disentildeo de una proacutetesis
de mano que pueda adaptarse al crecimiento del paciente
En este apartado se efectuaraacute el disentildeo tanto de la estructura exterior como del mecanismo de
funcionamiento Para hacerlo primero se disentildearaacute la estructura exterior ya que es la parte maacutes
innovadora del trabajo Una vez esteacute disentildeada la estructura exterior y el crecimiento de esta
para adaptarse al crecimiento del paciente se disentildearaacute el soporte para el mecanismo de
movimiento teniendo en cuenta el crecimiento de la estructura exterior y el mecanismo de
movimiento incluyendo en esta uacuteltima parte los caacutelculos de fuerzas y tensiones que la proacutetesis
recibiraacute al coger unos objetos determinados
Finalmente se haraacute el estudio de los materiales Esto se ha decidido hacer al final del trabajo
porqueacute de la eleccioacuten del material depende del peso de la estructura y las tensiones a las que
esta sea sometida
La caracteriacutestica principal de la proacutetesis es que esta seraacute lo maacutes parecida posible a una mano
humana real es decir estaraacute formada por 5 dedos el pulgar con dos articulaciones y los dedos
del 2 al 5 con 3 articulaciones
Se disentildearaacute una proacutetesis de mano es decir de la muntildeeca hasta los dedos sin incluir ni el
antebrazo ni el movimiento articulatorio de la muntildeeca
Con respecto a los movimientos la proacutetesis de mano se moveraacute con 3 motores Un motor
controlaraacute el movimiento de extensioacuten y flexioacuten del pulgar otro el movimiento de abduccioacuten y
aduccioacuten del pulgar y finalmente uno para el movimiento de los dedos del 2 al 5 Una
particularidad de esta proacutetesis es que las articulaciones de todos los dedos de flexionaraacuten hasta
ejercer el mismo valor de presioacuten con el objeto que se desea agarrar
Los motores bateriacuteas y sensores estaraacuten posicionados fuera de la mano Los motores y bateriacuteas
estaraacuten posicionados en el antebrazo y los sensores en el muacutesculo que terapeuta decida en
funcioacuten del nivel de amputacioacuten del paciente
42 Disentildeo de la estructura exterior
En este apartado se desarrollaraacute un disentildeo esteacutetico de proacutetesis de mano que cumpla las
caracteriacutesticas que se comentan a continuacioacuten
- La proacutetesis de mano deberaacute poder adaptarse a distintas medidas ya sea de longitud
como de amplitud tanto en la palma de la mano como en los dedos
- El peso de la mano no podraacute superar los 200 g
- La proacutetesis tendraacute que poder cubrirse con un guante de silicona el cual le
proporcionaraacute un tacto y color lo maacutes parecido posible al color de la piel del usuario
- La proacutetesis ha de ser funcional en cuanto a movimientos es decir ha de poder realizar
los movimientos necesarios para poder sujetar objetos
Paacutegina 42 Disentildeo de una proacutetesis de mano adaptable para nintildeos
421 Medidas antropomeacutetricas
Para poder disentildear una proacutetesis de mano que se adapte el crecimiento del paciente se disentildearaacuten
unas piezas que permitan mediante la combinacioacuten de estas la fabricacioacuten de proacutetesis con
distintas medidas Con este meacutetodo se pretenden solucionar dos problemas que actualmente
se encuentran en el mundo de las proacutetesis en primer lugar el precio excesivo de las proacutetesis
funcionales que hay actualmente en el mercado y en segundo lugar la necesidad que genera el
mercado de comprar una proacutetesis casi anualmente debido al crecimiento del paciente
Para poder disentildear unas piezas que se adapten a todas las manos la estructura interna de la
mano tendraacuten los grosores miacutenimos encontrados en el estudio del apartado 4 del capiacutetulo 2 y la
longitud seraacute variable en funcioacuten de cada paciente
Como conclusiones para el disentildeo el ancho de los dedos y el grosor de la mano tendraacuten unas medidas fijadas y el largo de los dedos y el ancho y largo de la palma variaraacuten en funcioacuten de las necesidades del paciente
Para hacerlo se disentildearaacute una proacutetesis de mano con las medidas miacutenimas encontradas en el estudio y a partir de esta se antildeadiraacuten piezas para adaptarla a las medidas que necesite cada paciente
Para dar a la proacutetesis una esteacutetica maacutes parecida a la mano humana real esta se tendraacute que cubrir con un guante de laacutetex
Finalmente las medidas que se han fijado a partir del estudio son
Grosor de los dedos Como se ha visto en el estudio anterior la anchura miacutenima de dedos es de 8 mm Es por esto que el disentildeo de las piezas que formaraacuten las falanges tendraacuten un grosor de 8 mm
Grosor de la mano Seguacuten el estudio se ha visto que la medida miacutenima de grosor de la palma de la mano es de 21 cm Asiacute concluimos que el grosor de la palma de la mano seraacute de 21cm
422 Disentildeo de la palma
Como se ha comentado en el Apartado anterior el disentildeo de esta proacutetesis seraacute un disentildeo
modular es decir se fabricaraacuten unas piezas a partir de las cuales cada paciente podraacute fabricarse
una proacutetesis cuyas medidas se adapten lo mejor posible a lo que seriacutea su mano
Para hacerlo se disentildearaacute una primera palma con las medidas miacutenimas que se han encontrado
en el estudio antropomeacutetrico descrito en el Apartado 4 del Capiacutetulo 2 y a partir de este disentildeo
se antildeadiraacuten piezas para poder aumentar tanto la amplitud de la palma como la longitud
Seguacuten el estudio antropomeacutetrico efectuado en el apartado 4 del capiacutetulo 2 las medidas miacutenimas
y maacuteximas de la palma que ha de poder tener la proacutetesis de mano son las que se muestran en la
Tabla 4221
Paacutegina 43 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4221 Medidas miacutenimas y maacuteximas de la palma (en mm)
Miacutenimas Maacuteximas
Ancho de la palma 55 93
Largo de la palma 65 120
A partir de estas medidas como se ha comentado anteriormente se ha disentildeado la primera proacutetesis de mano llamada Proacutetesis 0 (Veacutease Figura 4221) La proacutetesis 0 estaacute formada por 4 piezas que se une mediante el procedimiento que se muestra en la Figura 4222
Seguidamente se han disentildeado las piezas para permitir el crecimiento de la palma a lo ancho Estas piezas se posicionaraacuten en la parte central de la palma y se disentildearaacuten de tres medidas distintas que se podraacuten combinar para conseguir medidas intermedias Dado que la palma de la mano aumenta en mediana 30 mm con variaciones anuales de aproximadamente 3 mm seguacuten el estudio antropomeacutetrico efectuado anteriormente se disentildearaacuten piezas de 3 mm 5 mm y 10 mm que se podraacuten combinar entre ellas para conseguir el crecimiento que se desee En la Figura 4222 se muestran las piezas con las distintas medidas con las que se fabricaraacuten y en la Figura 4223 el resultado de antildeadir estas piezas a la palma de la proacutetesis junto con el procedimiento que se ha se seguir para antildeadirlas En este caso se ha antildeadido una pieza de 3 mm y una pieza de 5 mm (que pueden verse en la figura sentildealizadas de color verde) dando un crecimiento total de la mano de 8 mm de la ancho
Figura 4221 Palma de la mano con medida miacutenima Parte inferior en la izquierda y superior en la derecha
Paacutegina 44 Disentildeo de una proacutetesis de mano adaptable para nintildeos
El crecimiento de la palma a lo largo es proporcional al crecimiento de la mano a lo ancho pero con una constante de proporcionalidad distinta para cada paciente Es por esto que se disentildearon dos piezas para permitir este crecimiento una de estas piezas (Pieza 1) seraacute el crecimiento a lo largo de los extremos de la proacutetesis y por lo tanto tendraacute una amplitud igual que los extremos de la proacutetesis (27 mm) y una altura variable la otra pieza (Pieza 2) seraacute el crecimiento a lo largo de la parte central de la proacutetesis por lo tanto tendraacute unas medidas a lo ancho iguales que las de las piezas para el crecimiento a lo largo de la palma la otra pieza
Dado que el crecimiento de la palma a lo largo es de 55 mm con un crecimiento medio anual de 3 mm las piezas se disentildearaacuten con las medidas mostradas en la Tabla 4223
Figura 4222 Pieza para el crecimiento de la palma a lo ancho De izquierda a derecha las medidas de crecimiento son 3 5 y 10 mm
Figura 4223 Palma de la mano con medida intermedia En ese caso se han antildeadido las dos piezas de 5 y 10 mm
Paacutegina 45 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4223 Medidas de las piezas para el crecimiento a lo largo (en mm)
Pieza Ancho Largo
Pieza 1 27 3 5 10
Pieza 2 3 5 10 3 5 10
En la Figura 4224 se muestra una de las medidas de la Pieza 1 y en la Figura 4225 se muestra una de las medidas de la Pieza 2 Finalmente para entender el posicionamiento de estas piezas en la Figura 4226 se puede ver un ejemplo del posicionamiento de estas piezas Como se ha comentado anteriormente la Pieza 1 se situacutea en los extremos de la proacutetesis coincidiendo con la parte fija de la proacutetesis que se habiacutea disentildeado anteriormente esta parte se muestra en la Figura 4226 de color verde mientras que la Pieza 2 situada en la parte central de la proacutetesis se muestre en la figura de color azul
Figura 4224 Pieza 1 para el crecimiento a lo largo de la proacutetesis Se muestra la pieza para un crecimiento de
3 mm a lo largo
Figura 4225 Pieza 2 para el crecimiento de la proacutetesis a lo largo Se muestra la combinacioacuten de
crecimiento 10 mm a lo ancho por 3 mm a lo largo
Figura 4226 Palma de la mano con las piezas para el crecimiento a lo largo y a lo ancho En este ejemplo la proacutetesis tiene un crecimiento de 10 mm a lo ancho y 5 a lo
largo
Paacutegina 46 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Para el posicionamiento de los dedos del 2 al 5 se han disentildeado unas piezas cuya funcioacuten es
hacer de lazo entre la palma de la mano y los dedos estas piezas tienen en la parte inferior unas
pestantildeas que sirven para posicionar la pieza donde se desee de forma que la posicioacuten de los
dedos puede variar en funcioacuten del paciente
Para posicionar estas piezas se han antildeadido en las partes donde se encajan estas piezas unas
entradas donde se podraacuten introducir estas pestantildeas para fijar las piezas en las distintas
posiciones (Veacutease Figura 4228)
Finalmente en la Figura 4229 puede verse el resultado de antildeadir estas piezas a la proacutetesis que
se muestran de color verde en esta Figura
Figura 4227 Piezas para el posicionamiento de los dedos Figura 4228 Entradas para el posicionamiento de las piezas para el encaje de los dedos
Figura 4229 Resultado de antildeadir las piezas para el posicionamiento de los dedos a la proacutetesis
Paacutegina 47 Disentildeo de una proacutetesis de mano adaptable para nintildeos
423 Disentildeo de los dedos
Para el disentildeo de los dedos tambieacuten se ha optado por un disentildeo modular con la misma
estructura que en el caso de la palma Cada falange constaraacute de unas partes de medidas
miacutenimas y para conseguir las distintas medidas se antildeadiraacuten unas partes que permitiraacuten el
crecimiento en funcioacuten de las necesidades del paciente
Las partes de medidas miacutenimas seraacuten los extremos de las falanges (Veacutease Figura 4231) y las
partes para permitir el crecimiento seraacuten las partes centrales de las falanges
Para hacer el movimiento de flexioacuten y extensioacuten como se ha comentado anteriormente se
utilizaraacute un mecanismo basado en tendones Esto implica que el movimiento de flexioacuten se haraacute
mediante un cable que pasaraacute a traveacutes de todas las falanges y que al ser tensionado provocaraacute
la flexioacuten de las articulaciones De esta misma forma funcionaraacute el mecanismo de extensioacuten
siendo por esto que todas las falanges han de tener unos canales por donde pasar estos dos
cables (Veacutease Figura 4231)
Es importante comentar que todos los dedos tienen la misma estructura ya que el mecanismo
de movimiento es el mismo Asiacute pues lo uacutenico que variacutea de un dedo a otro son las medidas
miacutenimas de las falanges En la Tabla 4231 se muestran las medidas miacutenimas y maacuteximas de las
falanges de todos los dedos y la variacioacuten maacutexima en longitud que tendraacuten que poder aceptar
estas falanges
A partir de estas medidas se han disentildeado las piezas iniciales de cada falange y las piezas de
crecimiento Las piezas de crecimiento se han disentildeado en 3 medidas iguales para todas las
falanges Estas medidas son 1 3 y 5 mm debido a que el crecimiento de las falanges es
aproximadamente de entre 1 y 2 mm anuales hasta un maacuteximo de 12 mm como se puede ver
en la Tabla 4231 En la Figura 4232 se muestran las piezas para el crecimiento de las falanges
Finalmente para entender el funcionamiento del crecimiento en la Figura 4233 se muestra la
secuencia de uso donde puede verse en rojo la pieza antildeadida para el crecimiento de la falange
Tabla 4231 Medidas miacutenimas y maacuteximas de las falanges (en mm)
Dedo Falange Medida miacutenima
Medida maacutexima
Variacioacuten total
Pulgar 1 23 32 9
2 16 22 6
Iacutendice 1 29 40 11
2 19 26 7
3 12 16 4
Corazoacuten 1 33 45 12
2 21 30 9
3 13 18 5
Anular 1 30 41 11
2 20 28 8
3 13 18 8
Mentildeique 1 23 32 9
2 14 20 6
3 12 16 5
Paacutegina 48 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Figura 4231 Extremos de la falange En este ejemplo se trata de la falange 2 del dedo Iacutendice
Figura 4232 Piezas para el crecimiento de las falanges De izquierda a derecha tienen unas medidas de 1 3 y 5 mm
Figura 4233 Secuencia de uso para el mecanismo de crecimiento de las falanges
Paacutegina 49 Disentildeo de una proacutetesis de mano adaptable para nintildeos
La uacutenica falange que es diferente a las demaacutes es la uacuteltima esta estaacute formada como las demaacutes
por dos partes la parte inferior es igual que en las falanges explicadas anteriormente pero la
parte superior tiene un final redondo a diferencia de las demaacutes falanges En la Figura 4234 se
muestra la falange 3 del dedo iacutendice como ejemplo de disentildeo para la falange final de dedo
Finalmente para entender el resultado final de juntar las falanges de los dedos en la Figura
4235 se muestra el conjunto total de dedo iacutendice con unas medidas intermedias siendo estas
medidas las que se muestran en la Tabla 4232 En este caso siendo que las medidas miacutenimas
del dedo iacutendice para las Falanges 1 2 y 3 respectivamente son 29 19 y 12 se han antildeadido una
pieza de 1 mm en la falange 3 y 2 piezas de 1 mm en la falange 1 que se muestran de color rojo
en la Figura 4235
Tabla 4232 Medidas de las falanges del dedo iacutendice para el disentildeo de la Figura 135 (en mm)
Falange Medida
Falange 1 32
Falange 2 20
Falange 3 13
Figura 4234 Partes de la falange final del dedo A la izquierda se puede ver la parte superior en el centro la parte inferior y en la derecha el resultado de unir estas dos partes
Figura 4235 Ejemplo de dedo iacutendice con las medidas que se muestran en la Tabla 135
Paacutegina 50 Disentildeo de una proacutetesis de mano adaptable para nintildeos
43 Disentildeo del mecanismo de movimiento
Para el mecanismo de movimiento se ha escogido un mecanismo basado en tendones Para la
flexioacuten de los dedos un hilo haraacute la funcioacuten de tendoacuten cuando eacuteste se tense provocaraacute la flexioacuten
de las falanges Para la extensioacuten todos los dedos tendraacuten en la parte superior una goma elaacutestica
Para facilitar el disentildeo del mecanismo el movimiento del pulgar seraacute independiente del
movimiento de los otros 4 dedos Para esto la proacutetesis de mano tendraacute 3 motores Un motor
para el movimiento de extensioacuten y flexioacuten del pulgar otro para los movimientos de abduccioacuten y
aduccioacuten del pulgar y un motor para el movimiento de los dedos del 2 al 5
Para el movimiento de extensioacuten y flexioacuten de los dedos del 2 al 5 se utilizaraacute el mecanismo
ldquoDogleg Linkrdquo explicado en el Apartado 355
Para el disentildeo del mecanismo de movimiento se seguiraacuten tres pasos
1 Disentildeo de un soporte para el mecanismo que se adapte al crecimiento del paciente
2 Estudio del mecanismo de movimiento de los dedos iacutendice al mentildeique
3 Estudio del mecanismo de movimiento del pulgar
4 Caacutelculos de fuerzas y tensiones para todos los dedos
431 Disentildeo del soporte para el mecanismo de movimiento
En este apartado se muestra el disentildeo del soporte del mecanismo de movimiento Antes de
empezar es importante recordar que el mecanismo de movimiento es el ldquoDogleg Linkrdquo como ya
se ha dicho anteriormente Este mecanismo estaacute formado por los tendones y tres poleas Estas
poleas han de tener un movimiento vertical y un movimiento de rotacioacuten respecto a su eje para
esto el soporte tendraacute unos railes por donde se podraacuten mover las poleas de forma vertical Por
estos railes se moveraacute el eje de las poleas que a su vez giraran alrededor de este
En la Figura 4311 se muestra el soporte del mecanismo con las poleas y los cables para el
movimiento de estas
Figura 4311 Mecanismo de suporte para el mecanismo de movimiento
Paacutegina 51 Disentildeo de una proacutetesis de mano adaptable para nintildeos
432 Mecanismo de movimiento
Como se ha comentado anteriormente los movimientos de la proacutetesis de mano vendraacuten dados
por 3 motores Un motor controlaraacute los movimientos de los dedos 2 al 5 mientras que los
movimientos del pulgar estaraacuten controlados por dos motores
En este apartado se estudiaraacute el funcionamiento de los mecanismos de movimiento de los
dedos Primero se haraacute el estudio del mecanismo para los dedos 2 al 5 i finalmente el estudio
para el pulgar ya que estos tienen movimientos diferentes
4321 Mecanismo de movimiento de los dedos 2 al 5
Como se ha dicho al principio del capiacutetulo para el movimiento de los dedos 2 al 5 se utilizaraacute el
mecanismo de transmisioacuten ldquoDogLeg Linkrdquo comentado en el Apartado 355
El mecanismo de movimiento ldquoDogLeg Linkrdquo es un mecanismo cuya base de movimiento son los
tendones Los mecanismos basados en tendones funcionan como su nombre indica como lo
tendones de los dedos Un tendoacuten formado con un material resistente (La eleccioacuten de los
materiales se haraacute al finalizar los caacutelculos de fuerzas y tensiones) estaacute fijado a la uacuteltima falange
de los dedos este tendoacuten al ser tensionado provoca la flexioacuten de las articulaciones del dedo Es
un mecanismo muy tiacutepico en la fabricacioacuten de proacutetesis ya que no es caro y es muy efectivo
La diferencia principal de Deogleg Link frente a otros basados en tendones es que este
mecanismo permite con un solo motor adaptar cada uno de los dedos de la proacutetesis al objeto
que se desea agarrar
Seguacuten la Doctora Julita Medina del Hospital de Sant Joan de Deacuteu de Barcelona uno de los
principales problemas que presentan las proacutetesis mioeleacutectricas del mercado actual es que estas
no tienen capacidad para adaptarse al objeto que se quiere agarrar haciendo complicado
agarrar objetos pesados Asiacute con el mecanismo propuesto se solucionariacutea este gran problema
Para poder adaptarse al objeto que se desea agarrar este mecanismo estaacute formado por
tendones y poleas Para entender su estructura en la Figura 43211 se muestra su esquema
En este esquema se representan los dedos como rectaacutengulos numerados del 2 al 5 asiacute el
rectaacutengulo 2 por ejemplo representa el dedo iacutendice La posicioacuten de estos rectaacutengulos
representa la flexioacuten a la que se ha sometido cada uno de los dedos Para entender el mecanismo
se ha hecho el esquema que puede verse en la Figura 43211 donde se representa una
situacioacuten de agarre El funcionamiento del mecanismo para conseguir esta posicioacuten es el que se
explica a continuacioacuten
1 El motor estaacute posicionado en la parte inferior del mecanismo i puede tirar de la polea
P3
2 Cuando el motor tira de la polea 1 los cables que efectuacutean la flexioacuten de los dedos se
mueven de la misma forma Asiacute si el motor mueve la polea 1 una distancia X los
tendones de los dedos 2 al 5 se mueven la misma distancia
3 Cuando uno de los 4 dedos llega a la superficie del objeto (en este ejemplo el dedo
que primero llega a la superficie es el dedo 2) el tendoacuten de este dedo no puede moverse
maacutes pero gracias a la accioacuten de las poleas 2 y 3 los otros dedos (en este caso 3 4 y 5)
pueden seguir su movimiento de flexioacuten Esto ocurre gracias a que si el motor mueve la
polea P3 en direccioacuten negativa del eje Y si el dedo 2 ha llegado a la superficie para que
Paacutegina 52 Disentildeo de una proacutetesis de mano adaptable para nintildeos
la polea P1 pueda moverse el dedo 3 ha de desplazarse esta distancia en la misma
direccioacuten y a su misma vez la polea 3 se moveraacute esta misma distancia
4 Como se ve en la Figura 43211 el dedo 3 se ha desplazado menos distancia que los
dedos 4 y 5 esto es debido que el primero ha llegado a la superficie del objeto antes
que los dos uacuteltimos El uacuteltimo paso del mecanismo es que los dedos 4 y 5 lleguen a la
superficie Esto se daraacute porque el motor seguiraacute moviendo la polea 1 a la misma
velocidad pero como los dedos 2 y 3 estaacuten fijados la polea 2 no se moveraacute de sitio
haciendo que se mueva solo la polea P2 hasta que estos dedos lleguen a la superficie
del objeto
4322 Mecanismo de movimiento del Pulgar
Como se ha comentado anteriormente el pulgar tendraacute un movimiento independiente de los
otros dedos
Los movimientos del pulgar seraacuten el de abduccioacuten y aduccioacuten y los de extensioacuten y flexioacuten Para
poder hacer estos movimientos el pulgar tendraacute dos motores un motor para los movimientos
de aduccioacuten y abduccioacuten y un motor para los movimientos de extensioacuten y flexioacuten
Para el movimiento de abduccioacuten y aduccioacuten el motor haraacute un movimiento rotacional de 90
grados
Los movimientos de extensioacuten y flexioacuten de las falanges se haraacuten con un sistema de transmisioacuten
basado en tendones como en el caso de los dedos 2 al 5
Figura 43211 Esquema del mecanismo en reposo
Figura 43212 Esquema del mecanismo en movimiento
Paacutegina 53 Disentildeo de una proacutetesis de mano adaptable para nintildeos
433 Caacutelculos
En este apartado se haraacuten los caacutelculos de fuerzas y tensiones que han de soportar los
mecanismos de accionamiento tanto del pulgar como de los dedos 2 al 5 Esto se hace para
poder elegir que actuador se utilizaraacute para poner en marcha el mecanismo y para elegir el
material con el que se simularaacuten los tendones de los dedos
Estos caacutelculos se han hecho en dos etapas primero se han hecho los caacutelculos para el mecanismo
de accionamiento de los dedos 2 al 5 y a continuacioacuten los del mecanismo de accionamiento del
pulgar
Para hacer los caacutelculos se ha tenido que limitar la fuerza que la proacutetesis seraacute capaz de efectuar
Para hacerlo se han estudiado las fuerzas que pueden efectuar las proacutetesis que actualmente
estaacuten en el mercado En el Apartado 7 del Capiacutetulo 3 donde se hace un estudio de las proacutetesis
que actualmente estaacuten en el mercado se ha visto que en el caso de las proacutetesis para adultos
estas pueden efectuar una fuerza de pinzamiento de aproximadamente 120 N En el caso de la
fuerza de agarre de gancho se ha considerado una fuerza maacutexima de agarre de 6 kg a repartir
entre los dedos 2 al 5 dando una fuerza de 15 Kg por cada dedo
4331 Caacutelculos para el mecanismo de accionamiento de los dedos 2 al 5
Para hacer los caacutelculos de la fuerza que ha de hacer el actuador para los movimientos de los
dedos 2 al 5 primero se ha hecho un estudio de la posicioacuten y funcionamiento de los tendones de
los dedos
En la Figura 43311 puede verse la estructura de los dedos 2 al 5
Una vez se ha visto la estructura de los tendones cuando el dedo estaacute flexionado se ha hecho
un diagrama del dedo con las fuerzas aplicadas para facilitar el caacutelculo de estas
Los tipos de agarre que se han considerado para hacer el caacutelculo de la fuerza que ha de hacer el
tendoacuten de los dedos son Agarre ciliacutendrico agarre de punta y agarre de gancho cuyos esquemas
se muestran en la Figura 43312
Figura 43311 Visioacuten lateral de los tendones de los dedos Los tendones se han separado de sus vainas
Paacutegina 54 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Como ya se ha comentado anteriormente se ha supuesto una fuerza de contacto de 6 kg
repartidos entre los 4 dedos siendo esto una fuerza normal N= 1472N por cada uno de los
dedos 2 al 5
a) Agarre ciliacutendrico
Para el caacutelculo de fuerzas del dedo en el caso del agarre ciliacutendrico se ha supuesto un solo punto
de contacto en el extremo de la falange distal El esquema de Fuerzas se muestra a continuacioacuten
en la Figura 43313 donde puede verse la distribucioacuten de fuerzas que ejerce el tendoacuten y la
fuerza normal de contacto con el objeto que se desea agarrar
Para calcular la fuerza del tendoacuten (T) se ha hecho el caacutelculo de los momentos flectores respecto
al punto B que es el punto de articulacioacuten entre la falange distal y la falange intermedia
sum 119872119861 = 16119873 minus 6119879119884minus4119879119883 = 0
Siendo Ty y Tx las componentes verticales de T se obtienen las ecuaciones que se muestran a
continuacioacuten
119879119884 = 119879 119888119900119904 120572
119879119883 = 119879 119904119894119899 120572
Figura 43312 Esquema de los tipos de agarre donde se muestra con verde las falanges del dedo iacutendice De izquierda a derecha los tipos de agarre son Cilindrico De pinza y De gancho
Figura 3312 Esquema de la distribucioacuten de fuerzas con las medidas maacuteximas del dedo iacutendice para el agarre ciliacutendrico
(1)
(2)
Paacutegina 55 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Juntando las ecuaciones (1) y (2) se obtiene la relacioacuten entre la fuerza que ejerce el tendoacuten la
fuerza normal y el aacutengulo entre la fuerza y el eje esta relacioacuten es la que se muestra en la ecuacioacuten
(3)
119879 =16119873
6 cos 120572 + 4 sin 120572
Una vez que se ha obtenido el valor de la tensioacuten se han supuesto las dos situaciones liacutemites de
flexioacuten de las articulaciones Estas situaciones liacutemites son las situaciones de extensioacuten maacutexima y
de flexioacuten maacutexima que corresponden respectivamente a unos valores de β=180 y β= 90
En la tabla 43311 se muestran los valores de α para cada una de las situaciones y el valor
obtenido de la tensioacuten (T) para cada situacioacuten
Tabla 43311 Valores de α y T para las dos situaciones liacutemite
β [grados] α [grados] T [N]
180 90 5888
90 2234 3331
b) Agarre en punta
Para el caso del agarre en punta se ha seguido el mismo procedimiento que en el caso anterior
Primero se ha realizado un esquema de fuerzas que se muestra en la Figura 43313 A partir
de este esquema de fuerza se ha obtenido el valor de la tensioacuten (T) en funcioacuten de las otras
variables como se muestra en la ecuacioacuten (4)
119879 =16119873 middot 119888119900119904 120575
6 119888119900119904 120572 + 4 119904119894119899 120572
De esta funcioacuten se vio que el valor maacuteximo de la tensioacuten se obteniacutea para un valor de δ tal que
el coseno (α)=1 y por lo tanto δ=0 Asiacute se obtiene la misma situacioacuten que en el caso de agarre
ciliacutendrico ya que la posicioacuten de la fuerza normal es perpendicular a la falange Es debido a esto
que no se han hecho maacutes caacutelculos para esta situacioacuten ya que no se obtendraacute una situacioacuten maacutes
desfavorable que la obtenida en el caso anterior
Figura 43313 Esquema de fuerzas para el caso de agarre de punta
(3)
(4)
Paacutegina 56 Disentildeo de una proacutetesis de mano adaptable para nintildeos
c) Agarre de gancho
El uacuteltimo caso como se ha mostrado anteriormente se trata de una situacioacuten igual al caso de
agarre ciliacutendrico para un aacutengulo de flexioacuten β=90 grados es por esto que en este uacuteltimo caso no
se han realizado caacutelculos de ninguacuten tipo
Una vez que se ha obtenido la tensioacuten maacutexima que tendraacute que efectuar el tendoacuten de cada uno
de los dedos se ha pasado a calcular el par que tendraacute que hacer el motor para ejercer esta
fuerza
Para hacerlo se ha hecho un diagrama de la distribucioacuten de fuerzas del sistema ldquoDogleg Linkrdquo
que es el escogido para transmitir la fuerza de los tendones al motor Este diagrama de
distribucioacuten de fuerzas se muestra en la Figura 43314
Para calcular la FTot se han utilizado las ecuaciones (5) y (6) que se muestran a continuacioacuten
sum 119865119884 = 0 119865 = 2119879
sum 119865119884 = 0 119865119905119900119905 = 2119865
Con un valor de Tmax= 5888 y uniendo las ecuacione (5) y (6) se obtiene una Ftot-max de 2355N
Para obtener la informacioacuten necesaria para seleccionar el actuador se ha calculado el par que
tendraacute que efectuar el motor para dar una fuerza de 2355 N Suponiendo que esta fuerza se
transmitiraacute del motor a los tendones con una polea de 1 cm de radio se obtiene un par de
120548 = 2355 middot 1
100= 235 119873119898
Como conclusioacuten de este apartado tenemos que para el accionamiento de los dedos 2 al 5 seraacute
necesario un motor que pueda efectuar un par de 235 Nm y que para transmitir el movimiento
rotacional en movimiento lineal seraacute necesaria una polea de 1 cm de diaacutemetro
Figura 43314 Esquema de distribucioacuten de fuerzas para el mecanismo de transmisioacuten
(5)
(6)
(7)
Paacutegina 57 Disentildeo de una proacutetesis de mano adaptable para nintildeos
(8)
4332 Caacutelculos para el mecanismo de accionamiento del pulgar
Como se ha comentado anteriormente el pulgar podraacute hacer 4 movimientos los de abduccioacuten
y aduccioacuten y los de extensioacuten y flexioacuten Es por esto que los caacutelculos de fuerzas para el dedo pulgar
se han separado en dos partes Primero se haraacuten los caacutelculos para el movimiento de flexioacuten y
continuacioacuten los del movimiento de aduccioacuten y abduccioacuten
Para el caso del movimiento de flexioacuten los caacutelculos son muy parecidos a los efectuados en el
apartado anterior A continuacioacuten se muestra el esquema de distribucioacuten de fuerzas en el pulgar
suponiendo una fuerza normal en el extremo del dedo ya que es la situacioacuten maacutes desfavorable
(Veacutease Figura 43321)
A partir del esquema de fuerzas mostrado anteriormente se ha calculado el valor de la tensioacuten
en funcioacuten de las demaacutes variables obteniendo la ecuacioacuten (8)
T =22N
13 cos α + 4 sin α
Recordando que el valor de fuerza normal de contacto N que se estaacute considerando es de 1472
N se obtiene un valor maacuteximo de la tensioacuten de 8096 N que se da para un valor de α=90 grados
correspondiendo a la posicioacuten de extensioacuten maacutexima
Con este valor de tensioacuten se ha calculado el par que tendraacute que ejercer el motor para la flexioacuten
del pulgar Suponiendo que el mecanismo de accionamiento del pulgar es el mismo que utilizado
en el caso de los dedos 2 al 5 se obtiene un par de 081 Nm
Para el caso de la abduccioacuten y aduccioacuten del pulgar es importante comentar que no se pretende
que este dedo ejerza ninguna fuerza contra un objeto al mismo tiempo que se hacen estos
movimientos sino que estos solo se han antildeadido a la proacutetesis para que el usuario de esta pueda
tener maacutes posibilidades de agarre Es por esto que para este movimiento no se han de efectuar
caacutelculos extras
Figura 43321 Esquema de distribucioacuten de fuerzas para el Pulgar
Paacutegina 58 Disentildeo de una proacutetesis de mano adaptable para nintildeos
44 Eleccioacuten de los actuadores sensores y bateriacuteas
441 Actuadores
En este apartado se discutiraacuten las posibles opciones para los actuadores de la proacutetesis de mano
Se han de escoger tres actuadores uno para los movimientos de extensioacuten y flexioacuten de los dedos
2 al 5 uno para los movimientos de abduccioacuten y aduccioacuten del pulgar y finalmente uno para los
movimientos de extensioacuten y flexioacuten del pulgar
Seguacuten el estudio realizado en el Apartado 36 los actuadores maacutes utilizados para el disentildeo de
proacutetesis son los eleacutectricos siendo el maacutes comuacuten el de corriente continua Asiacute pues se ha
decidido utilizar un actuador eleacutectrico de corriente continua para el disentildeo de la proacutetesis Para
poder garantizar que la proacutetesis de mano puede fijar los dedos en una posicioacuten determinada se
utilizaraacute un motor CC con control PWM
Una vez se ha escogido el tipo de actuador que se quiere utilizar se ha buscado una empresa
fabricante de estos para hacernos una idea aproximada del impacto que tendraacute la colocacioacuten de
tres motores en la proacutetesis Es importante recordar que se han de seleccionar 3 motores
distintos cuya potencia limitante es distinta En primer lugar el motor para el movimiento de
flexioacuten de los dedos 2 al 5 tiene un par limitante de 24 Nm asiacute pues para este caso no se han
considerado motores con potencias menores Para el caso del movimiento de flexioacuten del pulgar
el par miacutenimo es de 08 Nm En el caso del movimiento de abduccioacuten y aduccioacuten del pulgar
como se ha comentado anteriormente no hay un par limitante sino que se seleccionaraacute un
motor que pueda fijar la posicioacuten del pulgar en dos posiciones una primera posicioacuten coplanaria
con el resto de la mano y la otra posicioacuten paralela al plano de la mano (para los agarres en pinza
y ciliacutendricos)
Al empezar la buacutesqueda del motor cuyo par limitante es de 24 Nm se ha visto que estos tienen
unas dimensiones muy grandes y un peso elevado Para solucionar este problema se ha
decidido utilizar un worm gearbox que reduce el par a efectuar por el motor a costa de la
reduccioacuten de la velocidad El worm gearbox que se ha escogido reduce el par a efectuar por el
motor de 24 Nm a 05 Nm y sus propiedades se encuentran en la Tabla 4411 Una vez se ha
reducido el par que he de efectuar el motor se ha buscado un actuador lo maacutes pequentildeo posible
que pueda hacer este par encontrando el motor cuyas propiedades se muestran en la Tabla
4412
Para el caso del movimiento de flexioacuten y extensioacuten del pulgar al tener que efectuar un par maacutes
pequentildeo (de 08 Nm) se ha podido seleccionar un actuador sin necesidad de utilizar ninguacuten
meacutetodo de reduccioacuten del par Las propiedades de este motor se encuentran en la Tabla 4413
Finalmente para el motor con el movimiento de abduccioacuten y aduccioacuten del pulgar se ha decidido
eliminar este movimiento fijando la posicioacuten del pulgar en oposicioacuten a la palma Esto se ha
hecho porque el impacto de poner otro motor maacutes es de un aumento del peso de 300g en el
conjunto de la mano Al encontrase con esta situacioacuten e habloacute con los responsables de
rehabilitacioacuten del Hospital Sant Joan de Deacuteu de Barcelona confirmando que es preferible
eliminar el movimiento a aumentar 300g el peso final de la proacutetesis
Paacutegina 59 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa Lenze worm gearbox SSN25 Ratio 10 [26]
Peso 400 g
Precio 100 euro
Imagen
Numero de ref y empresa M1173040 Lam Technologies [27]
Peso 350 g
Precio 31 euro
Par 05 Nm
Imagen
Numero de ref y empresa M1173040 Lam technologies [27]
Peso 520 g
Precio 33 euro
Par 08 Nm
Imagen
Como conclusioacuten se obtiene que el impacto de poner los actuadores es de un augmento de 127
kg respecto al peso final de la proacutetesis i de un aumento de 164 euro en el precio final de la proacutetesis
442 Bateriacuteas
En este apartado se ha hecho la seleccioacuten de una bateriacutea para el funcionamiento de la proacutetesis
Para hacerlo se han buscado las bateriacuteas que normalmente utilizan las proacutetesis de mano
encontrando que las maacutes utilizadas son las bateriacuteas de 750 mAHr
Para tener una orientacioacuten del impacto de posicionar esta bateriacutea en la proacutetesis se ha buscado
una bateriacutea que cumpla la caracteriacutestica limitante de 750 mAHr un ejemplo de bateriacutea que se
podriacutea utilizar se encuentra en la Tabla 4421
Tabla 4411 Propiedades del worm gearbox escogido
Tabla 4412 Propiedades del motor para flexioacuten y extensoacuten de los dedos 2 al 5
Tabla 4413 Propiedades del motor para flexioacuten y extensoacuten del dedo 1
Paacutegina 60 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa BP88 Liberating technologies [28]
Dimensiones 14 x 27 x 50 mm
Peso 53 g
Precio 50 euro
443 Sensores
Para la activacioacuten de los actuadores cuya funcionalidad es mover los dedos para poder efectuar
distintos tipos de agarre se ha decidido utilizar sensores que detecten el movimiento de
determinados muacutesculos y en funcioacuten de coacutemo sea este movimiento se activen unos motores u
otros
Esta proacutetesis tiene la posibilidad de mover los dedos con 3 motores Aunque esto sea asiacute se
utilizaraacuten uacutenicamente 2 sensores uno para el movimiento de abduccioacuten y aduccioacuten del pulgar y
otro para los movimientos de flexioacuten y extensioacuten de todos los dedos Esto se ha hecho asiacute porque
para el usuario el aprender a movilizar la proacutetesis es un trabajo complicado y que se ha de
empezar a entrenar desde muy pequentildeos Este entrenamiento se hace normalmente en
compantildeiacutea de los fisioterapeutas o rehabilitadores que ensentildean siguiendo unos determinados
pasos al usuario a utilizar la proacutetesis de tal forma que pueda sacarle el maacuteximo partido posible
Estos pasos se siguen para ensentildear uno por uno los posibles movimientos de la proacutetesis y como
enviar a la proacutetesis las sentildeales de activacioacuten En este caso como se ha comentado solo se
utilizaraacuten dos sensores es decir el usuario tendraacute que aprender dos movimientos para dar la
sentildeal a la proacutetesis De todas formas si la terapeuta decide que el usuario solo necesita poder
efectuar el mecanismo de flexioacuten y extensioacuten el actuador para la abduccioacuten y aduccioacuten del
pulgar puede bloquearse dando la posibilidad al usuario de trabajar con un solo sensor
Una vez se ha definido el nuacutemero de sensores que se tendraacuten que poner a la proacutetesis se ha
pasado a escoger el tipo de sensor pero para hacerlo antes se ha definido como seraacute el
mecanismo de movimiento que efectuaraacute el usuario para enviar la sentildeal al actuador
Para que el actuador empiece a mover los dedos el usuario tendraacute que tensionar un muacutesculo
que previamente el terapeuta decida como maacutes adecuado Al tensionar un muacutesculo el diaacutemetro
alrededor de este aumenta haciendo que si se situacutea una venda compresiva alrededor de este
muacutesculo con un sensor de elongacioacuten del material este sensor pueda notar cuando el muacutesculo
estaacute siendo activado pudiendo dar en ese momento la sentildeal al actuador para que efectuacutee el
movimiento de los dedos
Una vez se ha decidido queacute tipo de sensor se quiere utilizar se ha pasado a buscar distintas
empresas que lo fabriquen o lo vendan seleccionando el sensor cuyas caracteriacutesticas se
muestran en la Tabla 4431
Tabla 4421 Propiedades de la bateriacutea
Paacutegina 61 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Numero de ref y empresa SS-U-N-S-00015 RS-Online [29]
Peso Negligible
Precio 22 euro
Imagen
444 Conclusiones
Finalmente es importante comentar que en este apartado los actuadores bateriacuteas y sensores
que se han seleccionado no son los uacutenicos que podriacutean utilizarse sino que se han seleccionado
estos para tener una referencia del posible impacto que podriacutea tener en el peso y el precio el
posicionamiento de estos en la proacutetesis
Con la informacioacuten obtenida podemos concluir que el impacto en la proacutetesis provocado por el
posicionamiento de bateriacuteas actuadores y sensores es en total un aumento del peso
eproximado de 13 kg y un aumento en el precio de fabricacioacuten aproximado de 236 euro
45 Materiales En este apartado se haraacute un estudio de las propiedades de los posibles materiales que se usaraacuten
para la fabricacioacuten de la estructura exterior de la proacutetesis de mano
El prototipo de proacutetesis debe ser ligero y resistente por lo tanto el material o materiales han
de tener unas buenas propiedades mecaacutenicas
Los materiales que se estudiaraacuten son Aluminio Fibra de Carbono Titanio Nylamid y Poliacutemero
de ABS materiales que actualmente son empleados en la fabricacioacuten de proacutetesis debido a sus
caracteriacutesticas mecaacutenicas
Aparte de los materiales comentados anteriormente tambieacuten se estudiaraacuten nuevos materiales
que actualmente no se utilizan para la fabricacioacuten de proacutetesis pero que por sus buenas
propiedades mecaacutenicas podriacutean usarse para esta finalidad Estos materiales son
Orthocarbonium [30]
451 Aluminio
El aluminio es un material no feacuterreo que tiene unas buenas propiedades mecaacutenicas asiacute como
baja densidad y facilidad de manufactura Debido a su buena relacioacuten resistenciapeso es un
material muy usado en construccioacuten de aviones vagones ferroviarios y automoacuteviles
Las propiedades de este material se encuentran resumidas en la Tabla 4511
Densidad 27 gcm3
Liacutemite Elaacutestico 110-170 MPa
Resistencia a Traccioacuten 130-195 MPa
Dureza Vickers 35-48
Tabla 4511 Propiedades del Aluminio
Tabla 4431 Propiedades del sensor para la activacioacuten del motor
Paacutegina 62 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4521 Propiedades de la Fibra de Carbono
Tabla 4531 Propiedades del Titanio
452 Fibra de carbono
La fibra de carbono es un material de tipo polimeacuterico con propiedades mecaacutenicas muy elevadas
y densidad baja El inconveniente principal de este material es el precio
Las principales propiedades de este material son Elevada resistencia mecaacutenica moacutedulo de
elasticidad elevado baja densidad elevado precio de produccioacuten alta resistencia a agentes
externos alta capacidad de aislamiento resistencia a las variaciones de temperatura etc
La fibra de carbono tiene muchas aplicaciones en la industria aeronaacuteutica u automoviliacutestica al
igual que en barcos y bicicletas donde sus propiedades mecaacutenicas y su ligereza son importantes
Tambieacuten se estaacute haciendo cada vez maacutes comuacuten en otros artiacuteculos de comida como ordenadores
proacutetesis cantildeas de pascahellip
Existen distintas clases de fibra de carbono en funcioacuten de la cantidad de filamentos que tenga
la tela En este caso se estudiaraacute la fibra de carbono de 12000 filamentos ya que es la que tiene
mejores propiedades mecaacutenicas
Las propiedades de mecaacutenicas de este material se encuentran en la Tabla 4521
Densidad 187 gcm3
Liacutemite Elaacutestico 228 MPa
Resistencia a Traccioacuten 380 MPa
453 Titanio
El titanio es un elemento metaacutelico que se usa principalmente para preparar aleaciones ligeras y
fuertes
Es un material muy utilizado como substituto de los huesos y cartiacutelagos en cirugiacutea tambieacuten en
fabricacioacuten de tuberiacuteas y tanques que se utilizan para la elaboracioacuten de alimentos
Las caracteriacutesticas importantes de titanio son la biocompatibilidad resistencia a la corrosioacuten
sabor neutro ausencia de irritacioacuten en tejidos blandos y duros baja densidad universalmente
aplicable para proacutetesis e implantes combinable con proacutetesis de otros metales alta resistencia
mecaacutenicahellip
Las propiedades mecaacutenicas de este material se encuentran en la Taba 4531
Densidad 45 gcm3
Liacutemite Elaacutestico 116 MPa
Resistencia a Traccioacuten 220 MPa
Resistencia a Fluencia 140 MPa
Paacutegina 63 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4541 Propiedades del Nylamid
Tabla 4551 Propiedades del ABS
454 Nylamid
Existe una aplia gama de productos fabricados con Nylamid esta versatilidad hace que este
material sea una solucioacuten para varios problemas en la industria actual Entre las varias
aplicaciones de este material encontramos Cojinetes ruedas poleas rodillos aislantes
eleacutectricos y teacutermicos moldes prototiposhellip
Sus caracteriacutesticas le permiten operar en condiciones severas de abrasioacuten corrosioacuten y
flamabilidad Estas caracteriacutesticas son Facilidad de maquinada resistencia a la corrosioacuten
eficacia en eliminacioacuten de ruido y alta resistencia a la abrasioacuten
Las caracteriacutesticas mecaacutenicas del Nylamid se encuentran en la Tabla 4541
Densidad 45 gcm3
Moacutedulo de Elasticidd 110-170 Kgcm2
Resistencia a Traccioacuten 724 MPa
Dureza Shore-D 80-82
455 Poliacutemero ABS
El ABS es un poliacutemero compuesto de butadieno y acrilonitrilo o estireno que se puede fabricar
de tres formas diferentes por emulsioacuten masa y suspensioacuten-masa Las propiedades fiacutesicas del
plaacutestico ABS variacutean con el meacutetodo de manufactura pero variacutean maacutes con la composicioacuten
El ABS se caracteriza por ser un material muy fuerte y liviano lo suficientemente fuerte como
para ser utilizado en la fabricacioacuten de piezas para automoacuteviles
Entre otros el ABS se puede utilizar para fabricar contenedores pequentildeos dispositivos
eleacutectricos y electroacutenicos interiores de aviones paneles de instrumentos etc
Una de las grandes ventajas de este material es la facilidad con la que este material te permite
transformar en poco tiempo un modelo disentildeado en ordenador a una pieza real mediante
maacutequinas de prototipo raacutepido por impresioacuten 3D
Las caracteriacutesticas mecaacutenicas del ABS se encuentran en la Tabla 4551
Densidad 102-121 gcm3
Moacutedulo de Elasticidad 179 GPa
Resistencia a Traccioacuten 298-65 MPa
Resistencia a Fluencia 296-65 MPa
Paacutegina 64 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 4561 Propiedades del Orthocarbonio
456 Orthocarbonio
El orthocarbonio es un nuevo material compuesto de laacuteminas de fibra de carbono kevlar
polieacutester y fibra de vidrio Es un material muy riacutegido ademaacutes de tener una buena maquinabilidad
y capacidad de moldeo
La variacioacuten en la colocacioacuten de las fibras permite modificar ciertos paraacutemetros como la
resistencia mecaacutenica o su peso dependiendo de la aplicacioacuten que se le quiera dar al material
obteniendo productos tan diversificados como oacutertesis o plantillas
El problema principal de este material es que al ser un material nuevo y en investigacioacuten es un
material muy difiacutecil de obtener ya que solo existe actualmente un distribuidor en Italia
Las propiedades mecaacutenicas de este material se encuentran en la Tabla 4561
Densidad 068 gcm3
Resistencia a Traccioacuten 02 GPa
457 Material compuesto de fibra de carbono i kevlar
Este material compuesto se ha decidido estudiar como substitutivo del orthocarbono
(comentado en el Apartado 26 de este Capiacutetulo) ya que como se ha comentado anteriormente
se trata de un material difiacutecil de conseguir por ser un material en investigacioacuten
Este material compuesto por fibras de fibra de carbono y kevlar es un material muy resistente
y con baja densidad El proceso de fabricacioacuten de piezas con este material es parecido al proceso
de fabricacioacuten con fibra de carbono y como se ha comentado en el Apartado 32 se trata de un
proceso caro
No se han encontrado datos de las propiedades mecaacutenicas de este material es por esto que se
haraacute un estudio de las propiedades de los 2 materiales por separado Las propiedades de la Fibra
de Carbono se encuentran en el Apartado 22 de este Capiacutetulo y las del kevlar se comentan a
continuacioacuten
El Kevlar o poliparafileno tereflamida es una poliamida sinteridada por primera vez en 1965 por
el quimico Stephanie Kwolek Se trata de un material con una excepcional resistencia a la rotura
Esta caracteriacutestica hace que este material sea usado tanto en neumaacuteticos de coches como en
velas naacuteuticas o chalecos antibalas
Existen dos tipos de fibras de Kevlar el Kevlar 29 y el Keblar 49 El primero es la fibra tal y como
se obtiene de su fabricacioacuten se usa como refuerzo por sus buenas propiedades mecaacutenicas en
por ejemplo la fabricacioacuten de cables El segundo es un material compuesto de fibras de Keblar
con resina y se emplea para la fabricacioacuten de tejidos en deportes extremos
Las propiedades de este material se encuentran en la Tabla 45711
Paacutegina 65 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Tabla 45711 Propiedades del Kevlar
Densidad 144 gcm3
Moacutedulo de Elasticidad 80 GPa
Resistencia a Traccioacuten 35 GPa
458 Eleccioacuten del material
Para concluir la parte de eleccioacuten de materiales se ha calculado el peso de la proacutetesis con los
distintos materiales comentados anteriormente Asiacute con la limitacioacuten de peso de 200 g se han
descartado los primeros materiales
Los resultados obtenidos son los que se muestran en la Tabla 4581
Tabla 4581 Peso de la proacutetesis seguacuten cada material (en g9
Material Peso
Aluminio 246
Fibra de Carbono 170
Titanio 411
Nylamid 411
Poliacutemero de ABS 109
Orthocarbono 62
Material de Fibra de carbono y Kevlar 150
A partir de los pesos obtenidos se han descartado los materiales que teniacutean un peso superior a
200 g quedando entres les opciones posibles para el material de fabricacioacuten los que se comentan
a continuacioacuten
- Fibra de Carbono
- Poliacutemero de ABS
- Orthocarbono
- Fibra de carbono y Kevlar
Para seleccionar un material entre las opciones que se han comentado anteriormente se han
tenido en cuenta el precio la facilidad de obtencioacuten y las propiedades mecaacutenicas del material
Asiacute pues el poliacutemero de ABS se ha descartado entre las otras opciones por las pobres
caracteriacutesticas mecaacutenicas que tiene en comparacioacuten con los otros materiales Puesto que el
objetivo de la proacutetesis es que esta pueda ser utilizada desde los 6 a los 16 antildeos
aproximadamente el material de construccioacuten ha de ser resistente para que el usuario
(mayoritariamente nintildeos) puedan hacer las actividades que deseen sin tener que preocuparse
por si la proacutetesis podriacutea romper-se
Una vez se ha descartado el poliacutemero de ABS las opciones restantes son Orthocarbono fibra de
carbono y fibra de carbono con Kevlar Entre estos tres el orthocarbono se considera una opcioacuten
ideal para cumplir las necesidades del producto El problema que tiene esta material es que es
un material en investigacioacuten y que a parte de su complicada obtencioacuten tiene un coste muy
elevado Es por esto que el orthocarbono se ha descartado como opcioacuten para esta proacutetesis
Paacutegina 66 Disentildeo de una proacutetesis de mano adaptable para nintildeos
aunque es importante comentar que no se descarta de forma permanente sino que se cree que
en un futuro tendriacutea que valorarse la opcioacuten de fabricar este tipo de proacutetesis con este material
Finalmente entre la fibra de carbono y el material formado por fibra de carbono i kevlar se ha
escogido el segundo por sus buenas propiedades mecaacutenicas
Asiacute se puede concluir que el material escogido para la fabricacioacuten de la proacutetesis es el material
compuesto de fibra de carbono y kevlar obteniendo asiacute un peso de la proacutetesis1 de 150 g
46 Costes de fabricacioacuten En este apartado se ha hecho un caacutelculo de los costes de produccioacuten de la proacutetesis de mano
para tener una orientacioacuten del precio al que tendriacutea que venderse esta proacutetesis
Para hacerlo se han considerado los costes que se comentan a continuacioacuten
- Fabricacioacuten de los moldes Para fabricar las piezas con un material compuesto de fibra
de carbono y Kevlar es necesario fabricar unos moldes para las piezas Estos moldes
pueden ser utilizados maacutes de 200 veces es por esto que el coste de fabricacioacuten de
estos moldes de dividiraacute entre 200 proacutetesis
Es importante comentar que para la fabricacioacuten de esta proacutetesis al ser una proacutetesis
modular se necesitaraacuten los moldes que se especifican a continuacioacuten
Para las partes de la palma
- Molde para los extremos de la palma
- Molde para el extremo de la palma donde se situacutea el pulgar
- Molde para el crecimiento a lo ancho de 10 mm
- Molde para el crecimiento a lo ancho de 5 mm
- Molde para el crecimiento a lo ancho de 3 mm
- Molde para el crecimiento a lo largo de 10 mm
- Molde para el crecimiento a lo largo de 5 mm
- Molde para el crecimiento a lo largo de 3mm
Para los dedos
- Molde para los extremos de las falanges siendo en total un numero
de 10 moldes (ya que algunas falanges tienen la misma longitud)
- Molde para el crecimiento de las falanges de 5 mm
- Molde para el crecimiento de las falanges de 3 mm
- Molde para el crecimiento de las falanges de 1 mm
Para calcular el coste de fabricacioacuten de los moldes se ha contactado con una empresa
que fabrica piezas con fibra de carbono que mediante los documentos de CAD de la
mano ha podido contactar con su empresa proveedora de moldes dando un
presupuesto aproximado para la fabricacioacuten de estos de 11000euro
- Costes del material Como se ha comentado en el Apartado 45 el material escogido
es la Fibra de Carbono con Kevlar y por proacutetesis se utilizan 150 g de este material A
1 Se entiende como peso de la proacutetesis el peso de la estructura y el suporte del mecanismo sin considerar los actuadores y la bateriacutea
Paacutegina 67 Disentildeo de una proacutetesis de mano adaptable para nintildeos
partir de estos datos se calculara el coste del material para la construccioacuten de una
proacutetesis
- Costes de los actuadores bateriacuteas y sensores Como se ha comentado en el Apartado
44 para cada proacutetesis se utilizan 4 actuadores 1 bateriacutea y 3 sensores asiacute pues se
computaraacute para cada proacutetesis el precio de estos componentes
- Coste de horas de trabajo Finalmente en los costes de produccioacuten se computaraacuten el
coste de las horas de teacutecnico para construir esta proacutetesis Para hacerlo se ha
contactado con una empresa que se dedica a la fabricacioacuten de piezas con fibra de
carbono ya que el meacutetodo de construccioacuten de piezas con este material es el mismo
que con el material compuesto escogido Esta empresa ha hecho un caacutelculo
aproximado de las horas que un teacutecnico tendriacutea que dedicar para la fabricacioacuten de
esta proacutetesis El nuacutemero de horas que nos ha indicado la empresa son 50 hpieza
siendo el preciohora de un teacutecnico de 25 euroh
En la Tabla 461 se muestra el coste de fabricacioacuten desglosado
Tabla 461 Desglose de los costes de produccioacuten de una proacutetesis
Actividad Precio unidad Unidades Total
Fabricacioacuten de los moldes
11000 euro 200 proacutetesis
1 55 euro
Obtencioacuten del material
5227 euro 180 g 150 g 4356 euro
Actuadores - - 164 euro 2
Bateriacutea 50 euro 1 50 euro
Sensores 22euro 1 22 euro
Horas de trabajo 50 20 1000 euro
133454 euro
Finalmente podemos concluir que el precio de construccioacuten de la proacutetesis es de 133454 euro que
en comparacioacuten con las proacutetesis del mercado actual es un precio maacutes reducido
Es importante comentar que en este trabajo no se incluye un plan de negocio asiacute que no se haraacute
una suposicioacuten del precio al que se deberiacutea vender aunque se cree que para que la proacutetesis
funcione a la perfeccioacuten la supuesta empresa que comercialice el producto tendriacutea que ofrecer
un servicio de mantenimiento dentro del cual se incluyera la opcioacuten de adaptar la proacutetesis a las
medidas del usuario cuando este lo necesitara
47 Resumen del disentildeo realizado Para concluir este capiacutetulo se ha hecho un resumen del disentildeo realizado Primero se ha querido
mostrar el resultado final de la proacutetesis con unas medidas medias para entender bien coacutemo
funciona el mecanismo de crecimiento de esta Para hacerlo se han escogido las medidas medias
de una persona de 20 antildeos
En la Figura 471 se muestra una imagen de la proacutetesis con unas medidas medias Como puede
verse en la imagen en la palma se han antildeadido dos piezas una de 3 mm y una de 5 mm para el
2 El desglose del precio de los actuadores se encuentra en el Apartado 441
Paacutegina 68 Disentildeo de una proacutetesis de mano adaptable para nintildeos
crecimiento a lo ancho de la palma dos piezas tambieacuten de 3 y 5 mm para el crecimiento a lo
largo de la palma y un nuacutemero de piezas y medidas variable para el crecimiento de las falanges
Tambieacuten se ha querido mostrar como la proacutetesis puede agarrar distintos objetos En la Figura
472 se muestra coacutemo la proacutetesis puede hacer un agarre ciliacutendrico y en la Figura 473 se muestra
un agarre en pinza
Finalmente se ha hecho una tabla resumen (Veacutease Tabla 471) de todas las propiedades de la
proacutetesis incluyendo el material el peso los actuadores utilizados la bateriacutea la fuerza maacutexima
que esta puede ejercer y el precio total de la proacutetesis
Figura 471 Proacutetesis de mano con medida media
Figura 472 Ejemplo de agarre ciliacutendrico
Paacutegina 69 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Caracteriacutestica Valor
Material Compuesto de Fibra de carbono y Kevlar
Peso 15 Kg
Fuerza maacutexima que puede ejercer 1472 N cada dedo
Precio total de la proacutetesis 1335 euro
Medidas de la proacutetesis Aptas para nintildeos de entre 6 y 20 antildeos
Posibles tipos de agarre
- Agarre en pinza - Agarre ciliacutendrico - Agarre en gancho
Posibles movimientos independientes
- Movimiento de extensioacuten y flexioacuten del pulgar - Movimiento de extensioacuten y flexioacuten de los dedos iacutendice al mentildeique - Posibilidad de antildeadir otro actuador para el movimiento de abduccioacuten y aduccioacuten del pulgar
Figura 473 Ejemplo de agarre en pinza
Tabla 471 Caracteriacutesticas principales de la proacutetesis disentildeada
Paacutegina 70 Disentildeo de una proacutetesis de mano adaptable para nintildeos
5 Impacto ambiental En este apartado se ha hecho un estudio de la reciclabilidad del producto Para hacer el estudio
se ha considerado la reciclabilidad del material y por separado la de los actuadores bateriacuteas y
sensores que lo componen
Primero se analizara la reciclabilidad del material compuesto de fibra de carbono y Kevlar
(material escogido para el disentildeo de la proacutetesis) y los posibles meacutetodos que se utilizan
actualmente para reciclarlo
Este material tiene un precio de mercado muy elevado por lo que ya se estaacuten construyendo
plantas de recuperacioacuten de las fibras con el objetivo de reciclarlas en nuevos compositos
En estas plantas se separan las fibras de la resina a traveacutes de un proceso teacutermico llamado pirolisis
que hace que la resina se descomponga formando vapores y las fibras quedan libres en la
matriz lo que permite su recuperacioacuten En estas platas los vapores de la descomposicioacuten de la
resina son eliminados por incineracioacuten sin aprovechar su valor y con el consiguiente problema
de emisiones contaminantes
Es importante comentar que existe una patente creada por el grupo de investigacioacuten de la UPV
que define un meacutetodo para tratar estos vapores de forma que a partir de ellos se pueda obtener
un gas con una alta proporcioacuten de hidroacutegeno lo que permitiriacutea la separacioacuten de este compuesto
y su venta
En estas plantas actualmente se estaacute utilizando un tipo de pirolisis llamada pirolisis en vaciacuteo
aunque es importante destacar que se estaacute investigando en otro tipo de pirolisis llamada pirolisis
de microondas a continuacioacuten se explican estos dos tipos
- Pirolisis en vaciacuteo Se trata de un proceso seco operado a unos 500 C que recupera
resinas como un liacutequido comercializable A esa temperatura sin embargo el
producto de fibra puede retener residuos de oxidacioacuten o carbonizacioacuten
- Pirolisis de microondas Se trata otra forma de reciclar la fibra de carbono que estaacute
siendo desarrollada por compantildeiacuteas y universidades de Estados Unidos Inglaterra y
Alemania Generalmente la energiacutea de microondas absorbida por las propiedades
conductivas de la fibra de carbono calienta la resina de la matriz intensamente Esto
puede originar una descomposicioacuten de la resina maacutes raacutepida y la recuperacioacuten del
material sin formacioacuten de carbonizacioacuten acortando el tiempo de procesamiento
total y requiriendo equipos de escala maacutes pequentildea
Asiacute podemos concluir que los procedimientos de reciclaje de la fibra de carbono y materiales
compuestos de esta estaacuten en desarrollo no solo los meacutetodos para reciclarlo sino tambieacuten
meacutetodos no contaminantes para hacerlo
Paacutegina 71 Disentildeo de una proacutetesis de mano adaptable para nintildeos
6 Presupuesto
Para realizar el presupuesto del coste de realizacioacuten de este trabajo se ha hecho un desglose de
las actividades efectuadas para este fin Desglosando entre horas de buacutesqueda de informacioacuten
horas de disentildeo de producto y horas de caacutelculo A parte se han considerado los costes de
licencias de software siendo en este caso la licencia del software de SolidWorks programa que
se ha utilizado para el disentildeo de las piezas Finalmente tambieacuten se han contabilizado los
materiales utilizados para el hacer el prototipo de las piezas
51 Coste de las horas trabajadas En este apartado se ha calculado el coste de las horas trabajadas diferenciando como se ha
comentado anteriormente entre horas de buacutesqueda de informacioacuten horas de caacutelculo y horas de
disentildeo siendo el precio hora de estas actividades de 50 euroh 120 euroh y 40 euroh respectivamente
En la Tabla 511 se muestra el desglose de esta parte del presupuesto
Tabla 511 Presupuesto de las horas trabajadas
Actividad euroh Horas trabajadas Total [euro]
Buacutesqueda de informacioacuten 50 100 5000
Caacutelculo 120 20 2400
Disentildeo CAD 40 180 7200
24200
52 Coste de licencias y materiales En este apartado se muestra el coste por la compra de licencias y por la impresioacuten en 3D de los
prototipos del disentildeo
Tabla 511 Presupuesto de las horas trabajadas
Actividad Coste [euro]
Pago de la licencia de Solid Works 25
Impresioacuten de prototipos con impresora 3D 50
75euro
53 Presupuesto total Finalmente juntando los dos presupuestos descritos anteriormente se obtiene que el coste de
ejecucioacuten de este trabajo es de 24275 euro
Paacutegina 72 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Conclusiones En este trabajo de final del grado de Ingenieriacutea en Tecnologiacuteas Industriales se ha realizado el
disentildeo de una proacutetesis de mano que se adapta al crecimiento del nintildeo Para hacerlo esta proacutetesis
estaacute formada por unas partes fijas que unidas crean una proacutetesis de mano con la medida miacutenima
de un nintildeo de 6 antildeos Finalmente para el crecimiento se han disentildeado unas piezas cuya funcioacuten
es adaptar esta proacutetesis miacutenima a las medidas necesarias para el usuario
Durante la ejecucioacuten del trabajo se ha visto que actualmente existe una necesidad real de
investigar en el mundo de la prosteacutetica para hacer la vida de los amputados (ya sea congeacutenitos
como adquiridos) lo maacutes faacutecil posible y para que el derecho a tener una vida lo maacutes normal
posible no implique un impacto econoacutemico que muchas personas no se pueden permitir
Durante la realizacioacuten del trabajo se ha podido contactar con personas del Hospital de Sant Joan
de Deacuteu que trabajan en contacto constante con usuarios pediaacutetricos de proacutetesis que me han
dado la oportunidad de conocer las necesidades de un nintildeo amputado y el porqueacute de la
necesidad de innovar en este sentido Al hablar con estos profesionales he podido entender
que el mundo de la las proacutetesis en Espantildea (tanto de extremidades inferiores como de
extremidades superiores) tiene dos grandes grupos primero se encuentran aquellas proacutetesis
que tiene un coste extremadamente caro cuyas funcionalidades son extraordinarias y en
segundo lugar un grupo de proacutetesis con precios menores que las comentadas anteriormente con
funcionalidades maacutes limitadas El problema de la existencia de estos dos grupos es que las del
segundo grupo no cumplen las necesidades miacutenimas de muchos nintildeos con amputaciones y
ademaacutes que si esto se antildeade a que la proacutetesis pesa maacutes de lo que es agradable para el nintildeo
acaba significando que el nintildeo no utilice ninguacuten tipo de proacutetesis En oposicioacuten a estos casos
existen las proacutetesis comentadas en el primer grupo proacutetesis que tienen unos pesos menores
gracias a que estaacuten fabricadas con materiales maacutes innovadores y que ademaacutes cumplen con
creces las necesidades del usuario pediaacutetrico pero que por el hecho de que el nintildeo crece muy
raacutepidamente la utilizacioacuten de estas proacutetesis implicariacutea un impacto econoacutemico praacutecticamente
anual para las familias de estos nintildeos
Es de aquiacute de donde surge la idea de hacer un disentildeo de proacutetesis que pueda adaptarse al
crecimiento del paciente asiacute los pacientes con amputaciones congeacutenitas o con adquisicioacuten de
amputacioacuten a edades tempranas podriacutean acceder a proacutetesis del primer grupo (con precios
elevados pero que cumplen las necesidades del usuario) pagando su precio elevado solo una
vez durante su etapa de crecimiento
Finalmente se ha conseguido hacer un disentildeo que cumpla esta funcioacuten aunque como trabajo
futuro tendriacutea que fabricarse un prototipo para ver si el usuario se adapta bien al crecimiento y
si realmente el hecho de que la proacutetesis crezca no limita la funcionalidad de la proacutetesis
Finalmente es importante comentar que durante la realizacioacuten del trabajo se ha visto que la
impresioacuten 3D estaacute ganando terreno de forma acelerada en el mundo de la proteacutesica pudiendo
solucionar con creces el problema que se trata en este trabajo pero que no se ha considerado
este material porque al tratarse de disentildeo de proacutetesis de mano para nintildeos se ha querido trabajar
con materiales lo maacutes resistentes posibles
Paacutegina 73 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Agradecimientos
Quiero expresar mis agradecimientos a
El departamento de Innovacioacuten del Hospital Sant Joan de Deacuteu y especialmente a Jaime Perez
Payarols y Arnau Valls Esteve por el apoyo que me han dado durante el trabajo y por ponerme
en contacto con la doctora Julita Medina del departamento de Rehabilitacioacuten del mismo
hospital que me ayudoacute a entender las necesidades de los pacientes pediaacutetricos
A Pere Vallribera Rodriguez director gerente de Sant Joan de Deacuteu Terres de Lleida por la
confianza y el apoyo que me ha dado durante el trabajo
A David Palomar por compartir conmigo su conocimiento como disentildeador de producto asiacute como
su experiencia con SoftWare de disentildeo CAD Tambieacuten por ayudarme y apoyarme en todo lo
posible a lo largo del trabajo
Agradecer tambieacuten a mis padres Roser Soler y Jaime Ayats por la confianza incondicional y por
los aacutenimos que me han dado durante la ejecucioacuten del trabajo
Finalmente darle las gracias a Rauacutel Suarez por sus tutoriacuteas consejos y correcciones del trabajo
Gracias a todos
Paacutegina 74 Disentildeo de una proacutetesis de mano adaptable para nintildeos
Bibliografiacutea
[1] httpadampiorg - 15092016
[2] httpwwwmarisacabreracommarisacabreracastbtn4php - 15092016
[3] httpwwwelperiodicocomesnoticiassociedadmanos-magicas-2239033 - 15092016
[4] httpwwweuropapressescatalunyanoticia-hospital-sant-joan-deu-implanta-primera-
mano-bionica-adolescente-europa-20080122141447html - 15092016
[5] GERARD J TORTORA Y BRYAN H DERRICKSON ndash Principles of anatomy and physiology
[6] ZATSJORSKY ndash Kniematics of the human body
[7] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20de20la20MunCC83ecapdf ndash 22092016
[8] httpwwwtraumazaragozacomtraumazaragozacomDocumentacion_filesBiomecaCC
81nica20del20Pulgarpdf ndash 22092016
[9] D SCHLESINGER Der mechanische Aufbau der kunst-lichen Glieder in Ersatzglieder und
Arbeitshilfen Springer Berlin 1923
[10] httpacrwebsiteorgvolumes9473volumesv05NA-05 - 25092016
[11] httpwwwestrucplancomar ndash 26092016
[12] A VELAacuteZQUEZ E MERCHAacuteN ndash Rango de movilidad y funcioacuten descriptiva del dedo iacutendice
[13] httpwwwengruvicca~mech350Core-FilesSAMPLE-Presentation-(TBM-Hand)pdf ndash
201016
[14] httpswwwgooglecompatentsUS20100259057 - 201016
[15] httpswwwsensorprodcomresearch-articleswhite-papers2008-03_shawp_sha-
2008-03pdf - 201016
[16] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
bus-con-mano-michelangelo -201016
[17] httpwwwottobockesprotesicamiembro-superiorsistemas-de-brazo-y-manoaxon-
hook-con-mano-michelangelo - 201016
[18] httpesbebioniccomthe_hand - 201016
[19] httpexiii-hackberrycom - 211016
[20] httpwwwtouchbionicscom - 211016
[21] httphosmercomproductshooks - 211016
[22] httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-dorrance-mechanical-handhtml - 211016
Paacutegina 75 Disentildeo de una proacutetesis de mano adaptable para nintildeos
[23]httpfillauercomUpper-Extremity-Prostheticsbody-powered-systemshands-and-
gloveschild-handschild-CAPP-handhtml - 211016
[24]httpwwwottobockuscomprostheticsupper-limb-prostheticssolution-
overviewelectrohand-2000-for-children - 211016
[25] httpenablingthefutureorg - 211016
[26] httpwwwlenzecomenproductsgearboxes - 020217
[27] httpwwwlamtechnologiescomProductaspxlng=ENampidp=m1173040 - 020217
[28] httpwwwliberatingtechcom - 020217
[29]httpesrs-onlinecomwebcm_mmc=ES-PPC-_-bing-_-
0_ES_ES_Brand_RS_Pure_Phrase-_-
RSampmkwid=oHJ89SoF_dc|pcrid|71399546151438|pkw|rs|pmt|bp ndash 020217
[30] httpesmaterfadcom - 100217
[31] httpwwwresiduosprofesionalcomreciclar-residuos-fibra-de-carbono - 832017
[32] httpsesslidesharenetiadieguefibra-de-carbono-15388902 - 832017