PROTOTIPO DE PRÓTESIS MIOELECTRICA ACTIVA PARA MANO …
30
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: gonzalezdazajuanpablo@gmail.com **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected] PROTOTIPO DE PRÓTESIS MIOELECTRICA ACTIVA PARA MANO (PPEA) PROTOTYPE OF ACTIVE MIOELECTRIC PRÓTESIS FOR HAND (PPEA) J. Gonzalez* N. Liévano** F. Giraldo*** Resumen: Palabras Clave: Discapacidad, Prótesis Robótica, Mioelectrica, Miembro Superior. Más de mil millones de personas poseen una discapacidad y casi 200 millones tienen dificultades en su funcionamiento [1]. Por esto se implementa un prototipo de prótesis robótica mioelectrica activa la cual permite a su usuario recuperar u obtener parte de la funcionalidad del miembro superior. La cual funcionara por medio de servomotores los cuales serán controlados por medio de un microcontrolador. Este proyecto está bajo la modalidad investigación, el cual busca brindar soluciones mediante conocimientos adquiridos para dar solución a un problema social el cual beneficia a parte de la población, su ejecución se dará en la Universidad Distrital Francisco José de Caldas con el fin que este proyecto se proponga mejorar la calidad de vida para personas con dicha discapacidad.
Transcript of PROTOTIPO DE PRÓTESIS MIOELECTRICA ACTIVA PARA MANO …
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
PROTOTIPO DE PRÓTESIS MIOELECTRICA ACTIVA PARA MANO (PPEA)
PROTOTYPE OF ACTIVE MIOELECTRIC PRÓTESIS FOR HAND (PPEA)
J. Gonzalez* N. Liévano** F. Giraldo***
Resumen:
Palabras Clave:
Discapacidad, Prótesis Robótica, Mioelectrica, Miembro Superior.
Más de mil millones de personas poseen una discapacidad y casi 200 millones
tienen dificultades en su funcionamiento [1]. Por esto se implementa un prototipo de
prótesis robótica mioelectrica activa la cual permite a su usuario recuperar u obtener
parte de la funcionalidad del miembro superior. La cual funcionara por medio de
servomotores los cuales serán controlados por medio de un microcontrolador.
Este proyecto está bajo la modalidad investigación, el cual busca brindar soluciones
mediante conocimientos adquiridos para dar solución a un problema social el cual
beneficia a parte de la población, su ejecución se dará en la Universidad Distrital
Francisco José de Caldas con el fin que este proyecto se proponga mejorar la
calidad de vida para personas con dicha discapacidad.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
Abstract:
More than one billion people have a disability and almost 200 million have
difficulties in its functioning [1]. For this reason a prototype of active myoelectric
robotic prosthesis is implemented, which allows its user to recover or obtain part of
the functionality of the upper limb. Which will work by means of servomotors which
will be controlled by means of a microcontroller.
This project is under the research modality, which seeks to provide solutions
through knowledge acquired to solve a social problem which benefits part of the
population, its execution will be at the Francisco José de Caldas District University
in order that this project It is proposed to improve the quality of life for people with
this disability.
Key Words:
Disability, Robotic Prosthesis, Mioelectric, Superior Member.
1. Introducción:
A diario se encuentra que los problemas, malformaciones o amputaciones de las
manos en algunas personas son limitantes para el desarrollo de sus labores y su
vida cotidiana. Dado que cada vez los trabajos son más exigentes o específicos a
nivel de precisión y requieren que el error humano este prácticamente reducido a
cero, se ha generado un problema con las personas sobre todo a nivel laboral que
tienen accidentes en su mayoría en las manos a llevado a la pérdida o
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
malformación de las mismas, esto impidiendo o causando pérdidas laborales y de
una vida de cierto modo cotidiana.
Alrededor de 200 millones de personas que al tener problemas , malformaciones o
incapacidades en sus manos tienden a ser rechazadas de diferentes maneras tanto
a nivel de discriminación humana como discriminación laboral lo cual conlleva a que
dichas personas tengan problemas a nivel psicológico y pero aún monetario, es por
esto pensando en una alternativa de solución que a futuro pueda devolver a la
persona la satisfacción de recuperar parte de su movilidad en la mano o manos
perdida/as y también en algunos casos de devolver quizá la posibilidad de recuperar
su actividad laboral normal, se piensa en desarrollar el prototipo de prótesis activa
mioelectrica la cual busca ayudar a las personas que tienen esta discapacidad.
MARCO TEORICO
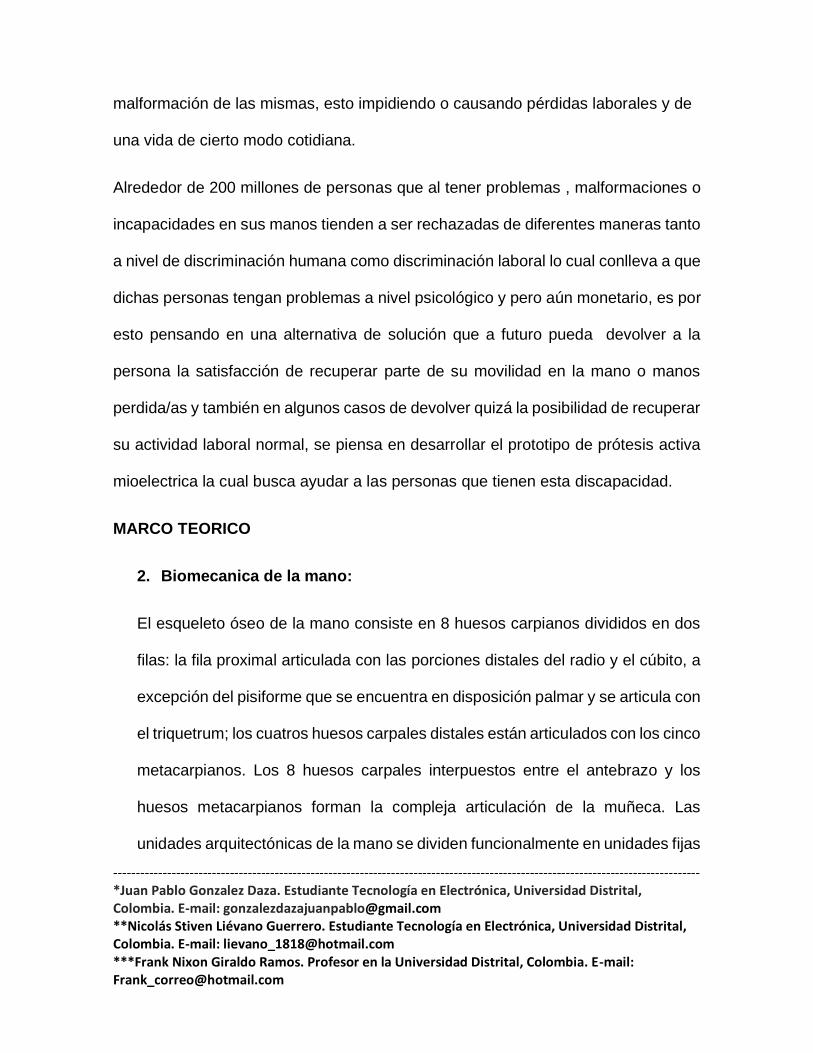
2. Biomecanica de la mano:
El esqueleto óseo de la mano consiste en 8 huesos carpianos divididos en dos
filas: la fila proximal articulada con las porciones distales del radio y el cúbito, a
excepción del pisiforme que se encuentra en disposición palmar y se articula con
el triquetrum; los cuatros huesos carpales distales están articulados con los cinco
metacarpianos. Los 8 huesos carpales interpuestos entre el antebrazo y los
huesos metacarpianos forman la compleja articulación de la muñeca. Las
unidades arquitectónicas de la mano se dividen funcionalmente en unidades fijas
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
y unidades móviles. La unidad fija de la mano está constituida por el segundo y
el tercer metacarpiano y la fila distal del carpo, su movimiento es muy limitado
en las articulaciones intermetacarpianas que también esta y en la segunda y
tercera articulaciones carpometacarpianas. Los huesos de la fila distal del carpo
(trapezium, trapezoide, hamate y capitate) forman un arco transverso estable
fijado en virtud de fuertes ligamentos intercarpianos, y el capitate como piedra
angular de la configuración del arco de los huesos carpianos[1].
Figura 1: Músculos de la mano [2]
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
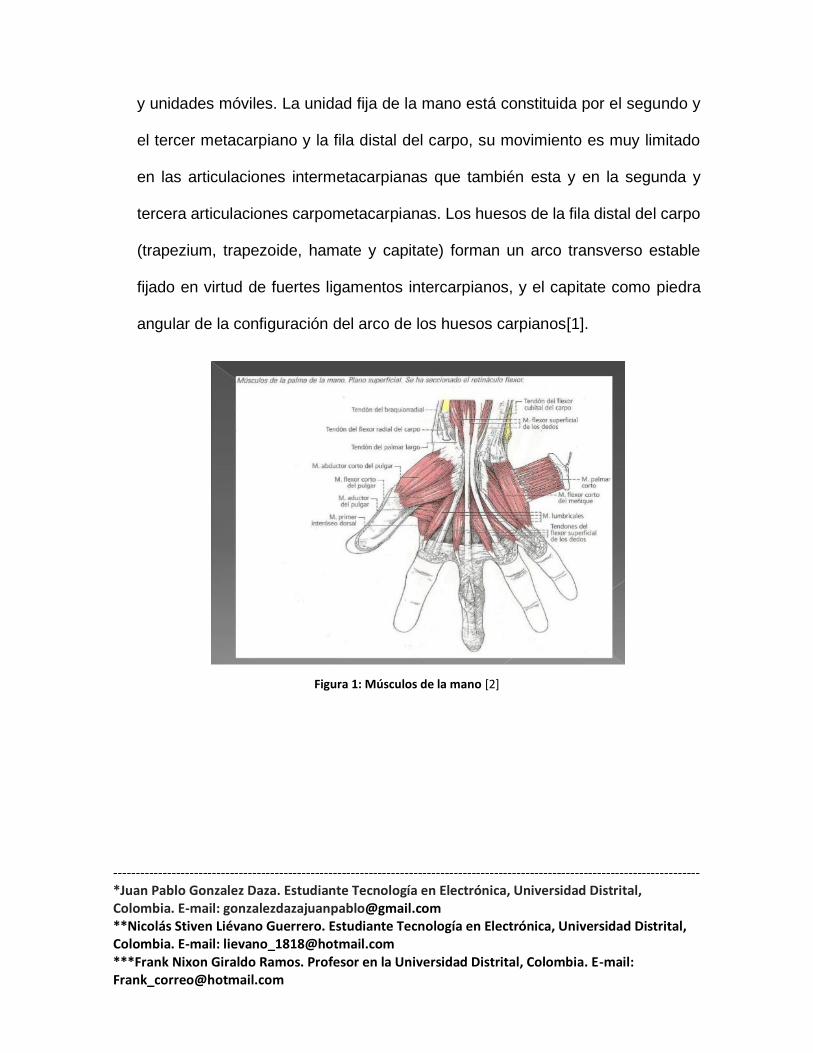
3. Amputación
Es la remoción o resección total o parcial de una extremidad seccionada a través
de uno o más huesos, en forma perpendicular al eje longitudinal del miembro. En
relación al mecanismo de producción puede ser de dos tipos [8]. Como se puede
observar en la figura 2:
- Amputación Primaria o Traumática: Es aquella producida por un agente
traumático.
- Amputación Secundaria o Quirúrgica: Es aquella electiva o programada
para ser realizada por medio de un acto quirúrgico [8].
Figura 2. Niveles de Amputación [4].
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
4. Arduino:
Arduino es una plataforma de creación de electrónica de código abierto, la cual está
basada en hardware y software libre, flexible y fácil de utilizar para los creadores y
desarrolladores. Esta plataforma permite crear diferentes tipos de
microordenadores de una sola placa a los que la comunidad de creadores puede
darles diferentes tipos de uso.
5. Electrodos Superficiales:
Este tipo de electrodo habilita a tomar las señales bioelectricas enviadas del cuerpo
del ser humano. De esta manera es posible crear un modelo de tipo eléctrico para
luego poder observar y analizar permitiendo así a los correspondientes especialistas
pronosticar enfermedades o anomalías de cualquier índole [10].
Figura 4. Electrodos Superficiales [8].

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
6. Movimientos de la mano:
Para la ejecución de los distintos movimientos de la mano existen dos zonas
principales:
- Zona palmar: En la zona palmar se encuentra la zona tenar, situada encima
del primer metacarpiano y la zona hipotenar, situada por encima del quinto
metacarpiano. La palma posee diversos pliegues, el pliegue palmar proximal,
el pliegue palmar distal y los pliegues digitopalmares. Entre los pliegues
palmar distal y digitopalmar se observan tres masas musculares que se
corresponden a la musculatura intrínseca palmar. Por otra parte, la zona
palmar de los dedos posee el pliegue interfalángico proximal y el
interfalángico distal. El pulpejo de los dedos es la parte más distal, blanda y
con gran sensibilidad debido a su gran inervación [8].
- Zona Dorsal: En la zona dorsal, con la piel fina y más elástica que la palma,
se observan cuatro salientes óseos que se corresponden con las cabezas de
los metacarpos de los cuatro últimos dedos. También se aprecian los
tendones de los extensores de los cuatro últimos dedos y entre éstos la
musculatura intrínseca dorsal. Los numerosos pliegues transversos
permitirán la flexión de los dedos [8].

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
7. Prensa Palmar de Fuerza:
Prensa de Fuerza.
Figura 5. Prensa palmar de fuerza [10].
DESARROLLO DEL PROYECTO Para su correcto funcionamiento el proyecto tiene unas etapas que siguen cierto
orden desde la obtención de datos de las señales mioelectricas hasta el
procesamiento del pulso en la tarjeta de programación. Se diseñó un diagrama de
bloques que se puede analizar en la figura 6.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
Figura 6. Diagrama de Bloques PPEA.
1. Pre-Amplificación:
La etapa de pre-amplificación está compuesta principalmente por un
amplificador instrumental (AD620). El amplificador diferencial básico es un
componente muy similar al amplificador de instrumentación, estos dos
elementos se caracterizan por distinguir entre sus dos entradas y amplificar
tan solo una de ellas, esto es lo que se necesita para este tipo de señales.
El amplificador diferencial básico solo puede conectarse con cargas
flotantes, esta es la desventaja que tiene este amplificador frente al de
instrumentación, y debido a esta razón se optó por el AD620. Las cargas
flotantes son cargas en las que ninguna de sus terminales está conectada a
tierra, aunque cabe aclarar que el amplificador de instrumentación
internamente está constituido por un amplificador diferencial y un circuito
que permite conectarlo a tierra.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
La ganancia del circuito integrado AD620 está definida por la siguiente
formula:
𝐺 = (49.4𝐾Ω
𝑅𝑔) + 1
Fórmula 1. Formula de ganancia AD 620.
Para el estudio, se tomó un Rg de 164Ω, el cual proporciona una ganancia
de 300 veces sobre la señal mioelectrica. Se optó por esta ganancia debido
a que permite observar la señal de los pulsos miolectricos con buena
amplitud y a su vez conocer la frecuencia a la que oscilan los pulsos, ya
que si es muy pequeña su comportamiento será como una señal DC, y la
frecuencia no podrá ser tomada. No se tomó una ganancia más alta debido
a problemas de saturación, puesto que al disminuir el Rg, la onda se cortara
y perderá información notable a las pruebas.
Figura 7. Pre-amplificación.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
2. Acoplamiento de Referencia:
Está compuesto por dos OPAM Tl072 en el primero se implementa un
seguidor de voltaje con el fin de estabilizar el voltaje generado en el AD 620
por consiguiente esto se envía al siguiente OPAM que consiste en una red
RC el cual tiene un polo y un cero es decir, en estado estable la ganancia es
de 1 lo que garantiza que el voltaje que se encuentra entre la Rg del AD 620
sea el mismo del electrodo de referencia. La red RC nos permite amortiguar
la salida hacia el microcontrolador lo que garantiza un amortiguamiento al
dejar de hacer el ejercicio muscular, y a su vez atrapar ruido sin la necesidad
de implementar un filtro de frecuencias alta lo que nos es de utilidad por
tamaño de la PCB
Figura 8. Acoplamiento de Tierras.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
3. Amplificacion:
La amplificacion esta hecha mediante un LM324 del cual se usan tres de sus
amplificadores operacionales. El circuito se diseña de tal modo que simule un
amplificador instrumental hecho por nosotros, los dos primeros OPAM son un
amplificador diferencial el cual amplifica las diferencias entre los dos voltajes es
por esto que en el primer OPAM la salida del AD 620 es conectada al positivo
de este mismo y en el segundo OPAM se referencia esta misma salida a tierra.
El tercer OPAM consiste en un restador el cual usa ambas entradas inversora y
no inversora para obtener una ganancia de 1 y amplificar la diferencia entre ellas.
Siguiendo los principios de construccion de un amplificador instrumental se
busca generar una ganancia de 1 estable que se sumara a una resistencia Rg(
En este caso R8) la cual se implementara en la formula de ganancia de un
amplificador instrumental (Formula 1) teniendo en cuenta esto se escogen
resistencias que no saturen la señal y brinden la ganancia de 1. Cada resitencia
debe ser igual a la de su etapa diferencial a excepción de R8 la cual se determino
fuera de 43.6 K lo que nos da una ganancia de 30 veces.
No se escogio una resistencia menor o mayor debido a que se busca que el
pulso generado sea superior a los 2 voltios y no menor a 1 voltio.
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
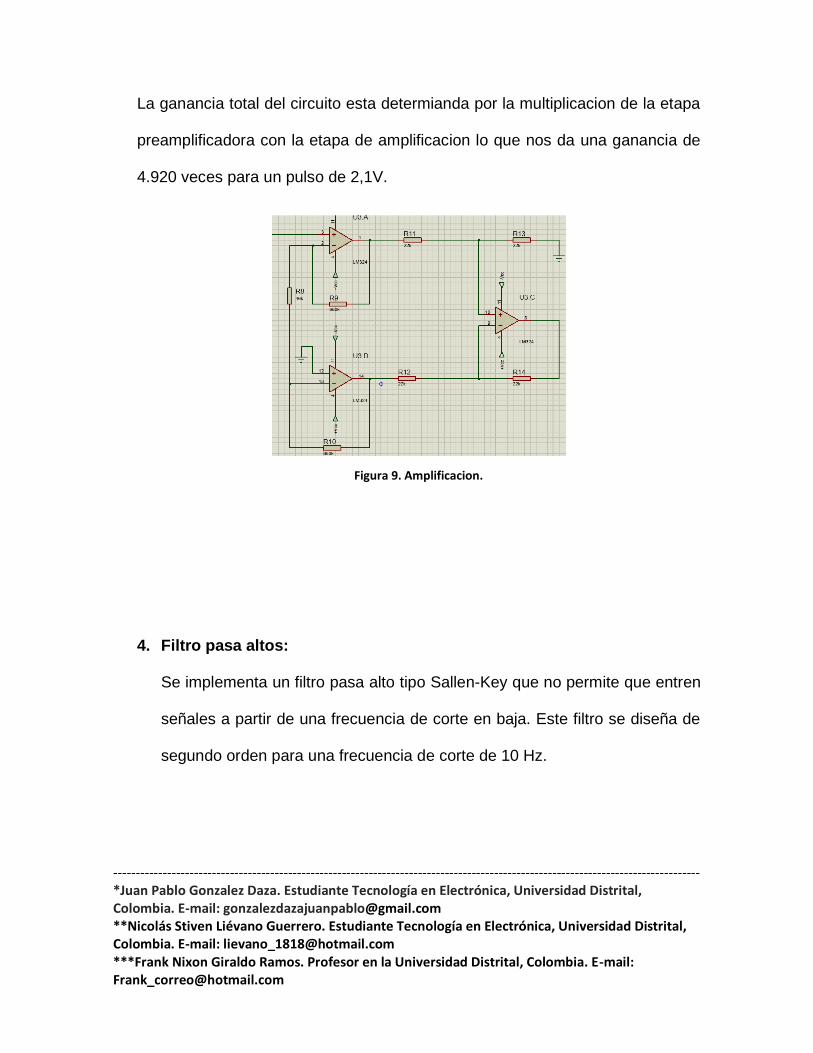
La ganancia total del circuito esta determianda por la multiplicacion de la etapa
preamplificadora con la etapa de amplificacion lo que nos da una ganancia de
4.920 veces para un pulso de 2,1V.
Figura 9. Amplificacion.
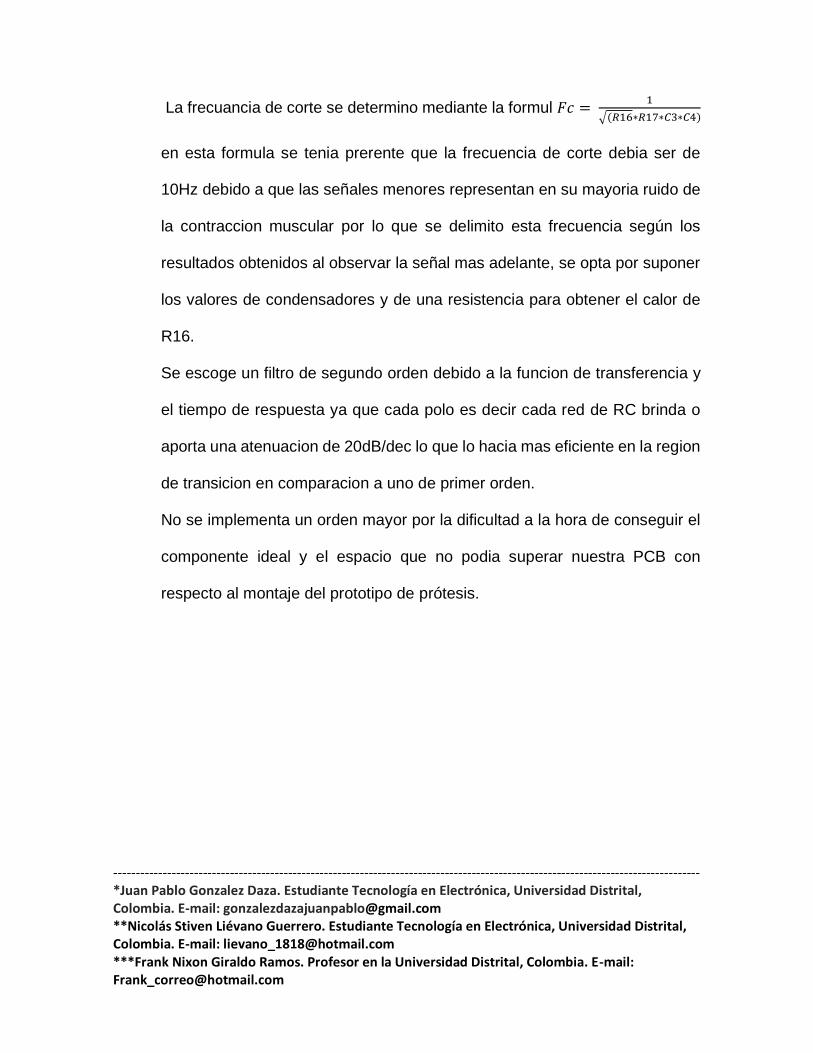
4. Filtro pasa altos:
Se implementa un filtro pasa alto tipo Sallen-Key que no permite que entren
señales a partir de una frecuencia de corte en baja. Este filtro se diseña de
segundo orden para una frecuencia de corte de 10 Hz.
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
La frecuancia de corte se determino mediante la formul 𝐹𝑐 = 1
√(𝑅16∗𝑅17∗𝐶3∗𝐶4)
en esta formula se tenia prerente que la frecuencia de corte debia ser de
10Hz debido a que las señales menores representan en su mayoria ruido de
la contraccion muscular por lo que se delimito esta frecuencia según los
resultados obtenidos al observar la señal mas adelante, se opta por suponer
los valores de condensadores y de una resistencia para obtener el calor de
R16.
Se escoge un filtro de segundo orden debido a la funcion de transferencia y
el tiempo de respuesta ya que cada polo es decir cada red de RC brinda o
aporta una atenuacion de 20dB/dec lo que lo hacia mas eficiente en la region
de transicion en comparacion a uno de primer orden.
No se implementa un orden mayor por la dificultad a la hora de conseguir el
componente ideal y el espacio que no podia superar nuestra PCB con
respecto al montaje del prototipo de prótesis.
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
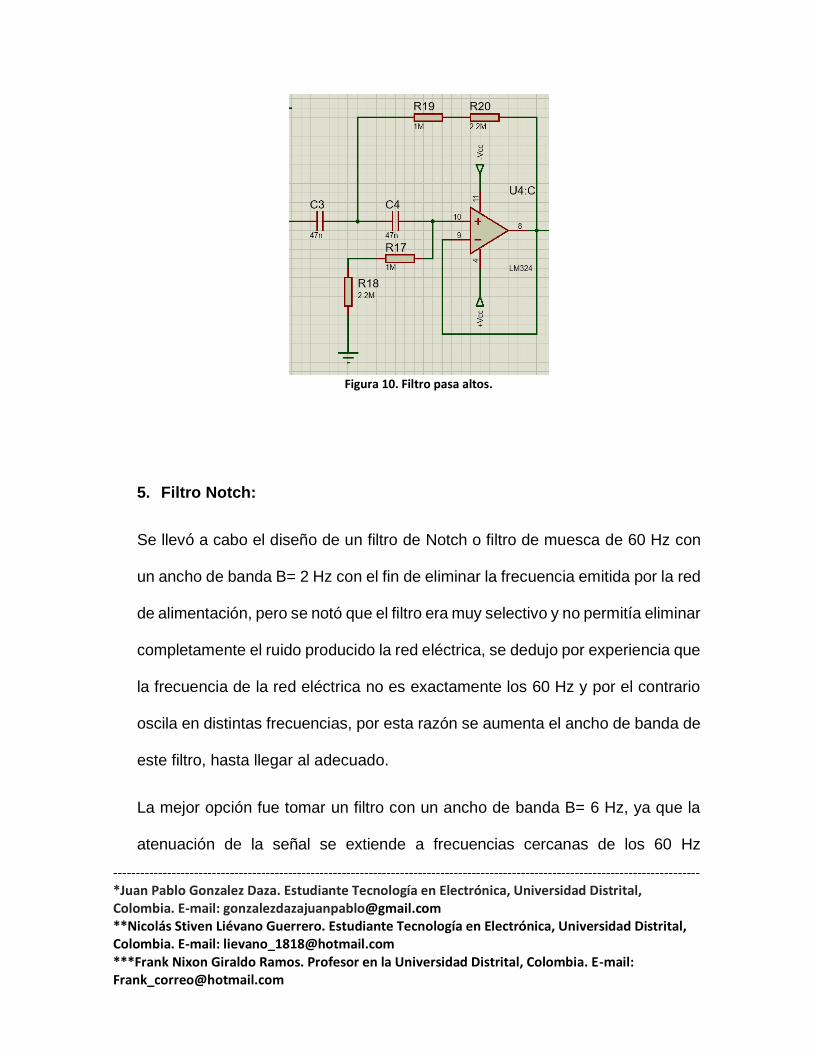
Figura 10. Filtro pasa altos.
5. Filtro Notch:
Se llevó a cabo el diseño de un filtro de Notch o filtro de muesca de 60 Hz con
un ancho de banda B= 2 Hz con el fin de eliminar la frecuencia emitida por la red
de alimentación, pero se notó que el filtro era muy selectivo y no permitía eliminar
completamente el ruido producido la red eléctrica, se dedujo por experiencia que
la frecuencia de la red eléctrica no es exactamente los 60 Hz y por el contrario
oscila en distintas frecuencias, por esta razón se aumenta el ancho de banda de
este filtro, hasta llegar al adecuado.
La mejor opción fue tomar un filtro con un ancho de banda B= 6 Hz, ya que la
atenuación de la señal se extiende a frecuencias cercanas de los 60 Hz

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
permitiendo una gran cantidad de eliminación en el ruido del circuito, pero de la
misma forma sin afectar la toma de la señal mioelectrica. Las fórmulas para
determinar los componentes del filtro fueron:
𝑄 =𝐹𝑐
𝐵
Fórmula 2. Factor de Calidad Filtro Notch.
Donde Fc es la frecuencia de corte y B es el ancho de banda.
Se sigue un prototipo de filtro Notch como el que se muestra en la siguiente
figura:
Figura 11. Estructura de filtro Notch.
Para empezar se supone el condensador (C) de un valor comercial y mediante
la siguiente formula:

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
𝑅 =1
2𝜋𝐶𝐹𝑐
Fórmula 3. R de Filtro Notch
Para los cálculos de los demás componentes se usan las siguientes formulas:
𝑅𝑓 = 𝑅
2 𝑦 𝐶𝑓 = 2𝐶
Fórmula 4. Valores Rf y Cf.
En nuestro caso en el diseño del filtro Notch se cambia la resistencia de Rf en
configuración con su salida a otro OPAM que permitirá regular el ancho de banda
del filtro lo cual permitirá precisión en las oscilaciones de la frecuencia de red.
Por último el filtro Notch está en configuración con un filtro pasa bajo de primer
orden que garantiza la amplificación de la señal y el impedir el paso de
frecuencias mayores a 3000Hz.
El diseño circuital final es el siguiente:
Figura 11. Filtro Notch.
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
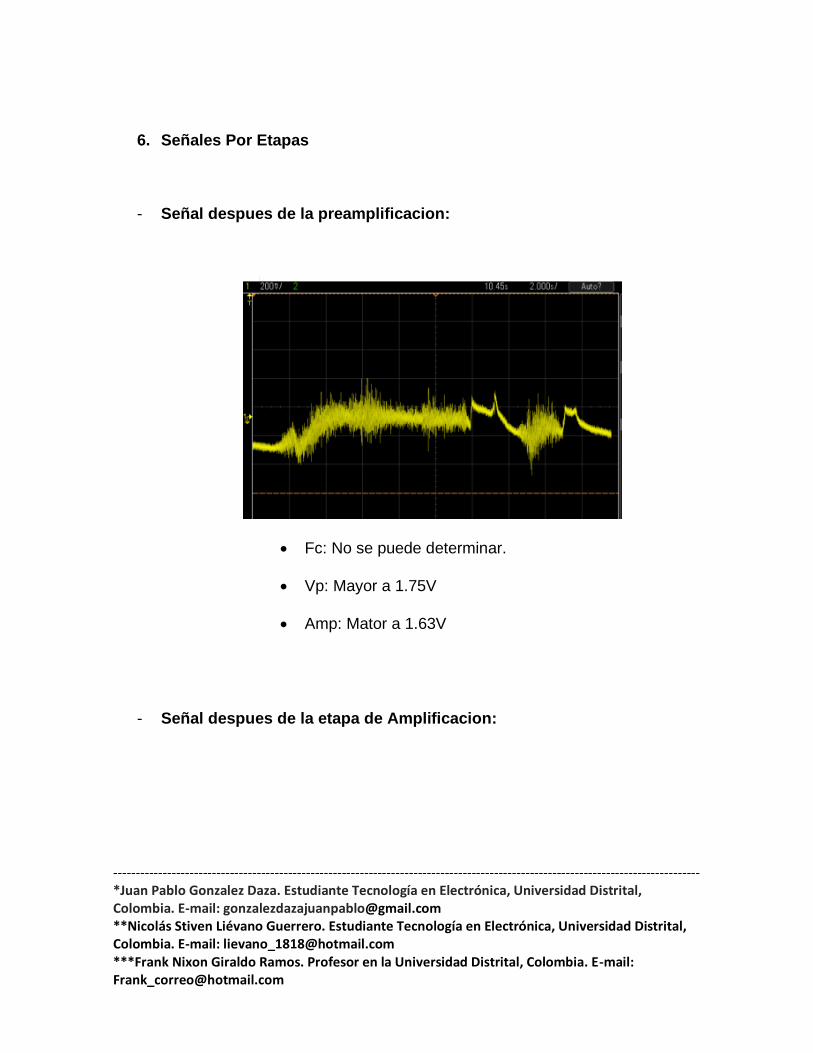
6. Señales Por Etapas
- Señal despues de la preamplificacion:
• Fc: No se puede determinar.
• Vp: Mayor a 1.75V
• Amp: Mator a 1.63V
- Señal despues de la etapa de Amplificacion:

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
• Fc= No se puede determinar
• Vp = 5,3V
• Amp = 2,1V
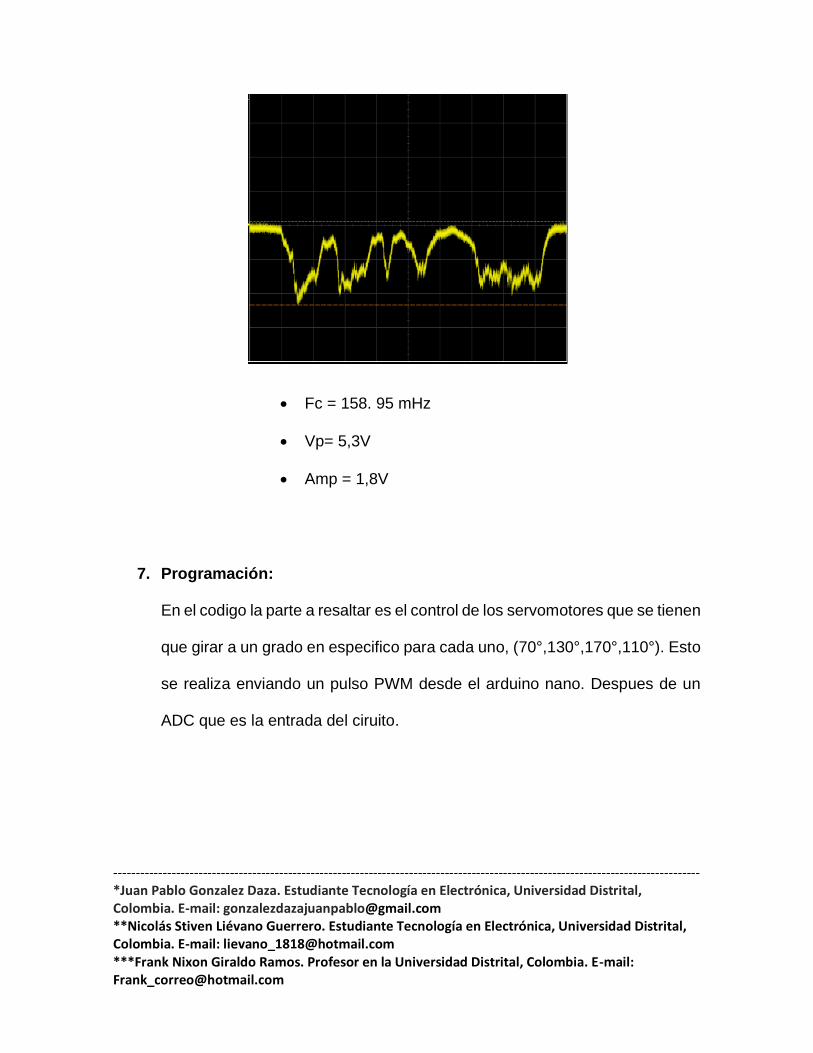
- Señal despues de la etapa de filtros:
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
• Fc = 158. 95 mHz
• Vp= 5,3V
• Amp = 1,8V
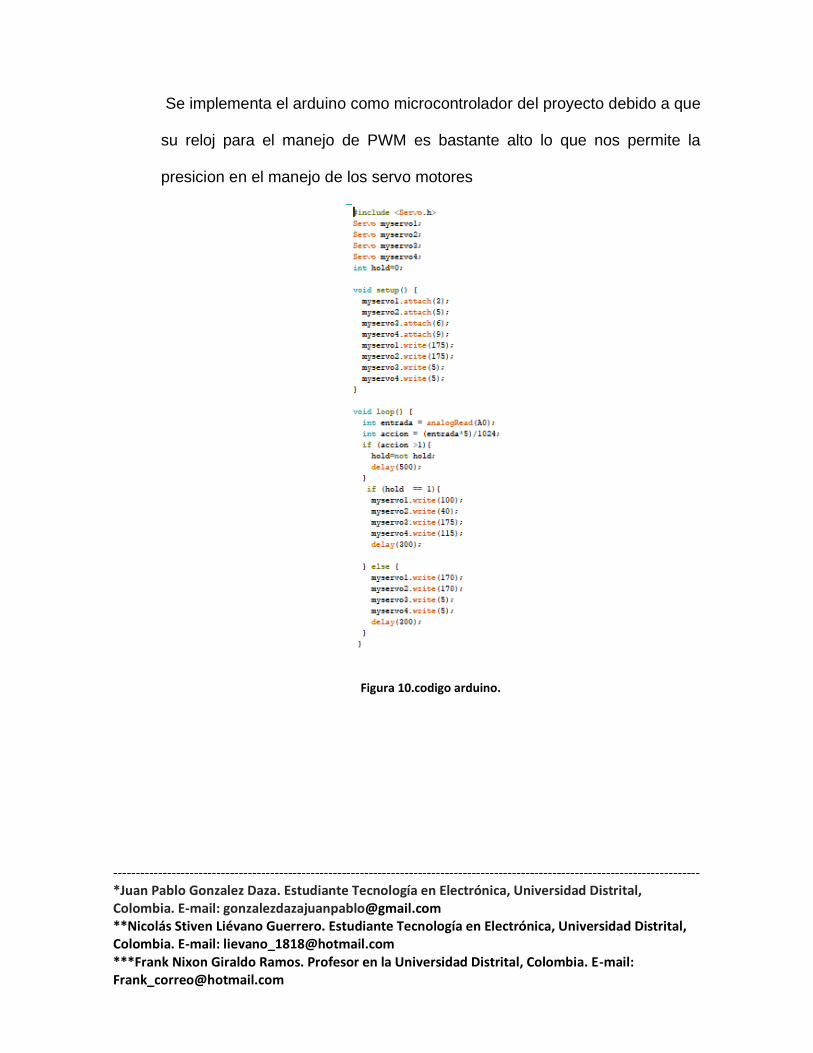
7. Programación:
En el codigo la parte a resaltar es el control de los servomotores que se tienen
que girar a un grado en especifico para cada uno, (70°,130°,170°,110°). Esto
se realiza enviando un pulso PWM desde el arduino nano. Despues de un
ADC que es la entrada del ciruito.
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
Se implementa el arduino como microcontrolador del proyecto debido a que
su reloj para el manejo de PWM es bastante alto lo que nos permite la
presicion en el manejo de los servo motores
Figura 10.codigo arduino.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
8. Actuadores:
Los servomotores MG90S son acoplados en la prótesis, estos tienen torque
de 1.8 kgf∙cm a 2.2 kgf∙cm, y funcionan de 4.8V a 6V. Se tienen 4
servomotores, uno para cada dedo ya que el dedo anular y el meñique
comparten servomotor.
Figura 11. Servomotor MG90S.
El acople de los servos es algo complejo ya que el espacio es reducido, se
aprovecha el diseño del antebrazo para poder atornillar estos a la base, para
despues unir las falanges a estos por medio de nailon. Como se puede
observar en la siguiente imagen.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
Figura 12. Servomotores en prótesis.
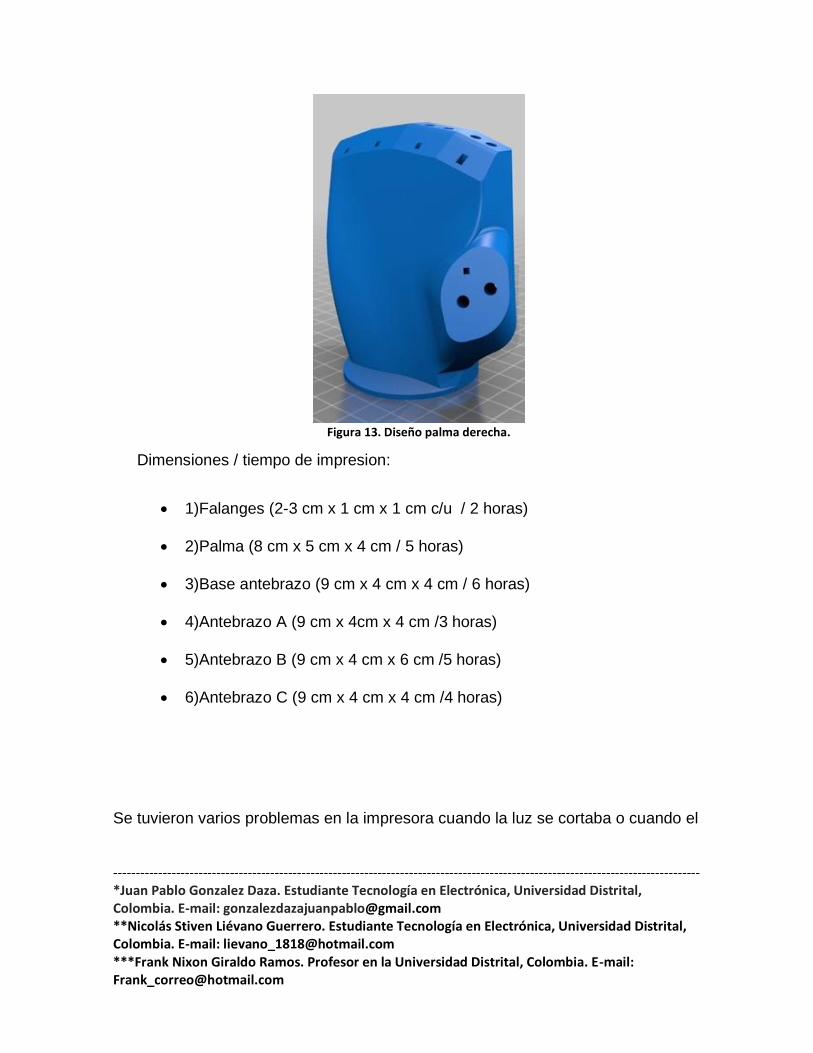
9. Prótesis:
La prótesis se desarrollo en el grupo de investigacion DIGITI en la impresora
3D, un total de 23 horas de impresión y un gasto de 580 g de PLA negro de
1.7 mm, el diseño es una archivo .stl y mediante el programa CURA se realiza
el archivo necesario para la impresora. A continuación se presenta una
imagen con el diseño de la palma que fue realizado.
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
Figura 13. Diseño palma derecha.
Dimensiones / tiempo de impresion:
• 1)Falanges (2-3 cm x 1 cm x 1 cm c/u / 2 horas)
• 2)Palma (8 cm x 5 cm x 4 cm / 5 horas)
• 3)Base antebrazo (9 cm x 4 cm x 4 cm / 6 horas)
• 4)Antebrazo A (9 cm x 4cm x 4 cm /3 horas)
• 5)Antebrazo B (9 cm x 4 cm x 6 cm /5 horas)
• 6)Antebrazo C (9 cm x 4 cm x 4 cm /4 horas)
Se tuvieron varios problemas en la impresora cuando la luz se cortaba o cuando el

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
PLA se acababa en mitad de una pieza, se pierde el proceso y se tiene que reiniciar
la pieza.
Para unir las falanges se utiliza una tira de caucho y el resto de piezas se une con
pegamento o se atornillan y para el movimiento articular se utiliza nailon ya que no
genera mucha friccion entre los conductos internos de la prótesis, en la siguiente
imagen se puede observar el resultado total, con sus partes especificadas
anteriormente.
Figura 14. Prótesis terminada.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
10. Pruebas
- Para determinar un valor confiable de ganancia en el cual se pudiera obtener
la mayor ganancia posible sin saturar o obtener demasiado ruido de la señal
mioelectrica se probo con distintas configuraciones de resistencia las cuales
arrojaban un valor distinto de voltaje, a mayor resistencia menos ganancia
existia y a menor resistencia esta aumentaba aumentando los niveles de
voltaje, sin embargo al ser menor a 220 ohm se observo una saturacion en
frecuencia y una señal muy distinta a la obtenida con resistencias mayores
debido al ruido porque se opta por una ganancia de 300 veces y se piensa
en una etapa de amplificacion ya que el voltaje con esto no superaba los
900mV.
- En la etapa de amplificacion se utilizo una ganancia muy pequeña debido a
los mismos problemas de ruido y filtrado de estos mismos, asi como los
valores pico que superaban los 24V y no nos permitian el uso de un
microcontrolador ideal.
- Para la programacion en un comienzo se iniciaron pruebas con la tarjeta
PsoC 5 LP la cual fue elegida debido a sus OPAM integrados que permitian
la amplificacion de la señal evitando a su vez el uso de la etapa amplificadora
y la reduccion de la PCB circuital. Al tiempo de esto de desistio al uso de este
----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
programador debido a su poca capacidad en cuanto a su reloj y el manejo de
pwm lo que dificulltaba la precision de los servo motores y esto a su vez
impedia el cumplimiento del objetivo en cuanto al movimiento prensa palmar.
También se hicieron pruebas con la tarjeta Mbed Nucleo 446RE, esta mostro
un buen comportamiento en cuanto la conversion ADC y el manejo de los
actuadores, sin embargo, no se uso como programador final debido a su
tamaño y a lo complicado y costoso que salia la adquisición de un ejemplar
similar de tamaño recudico de la misma fabrica ARM.
PERSPECTIVAS
Para el mejoramiento de la prótesis se podria realizar una adquisición de la
señal un poco mas compleja para lograr separar los impulsos generados por
cada dedo, asi poder tener una mayor libertad para usarla.
Se puede optar por un diseño mas completo en cuanto a la estructura
protesica que permita incluso el movimiento de la muñeca misma.
Se puede agregar al equipo de trabajo especialistas en el campo medicinal y
conocimiento de electrodos invasivos esto permitira una adquisición de señal
muy detallada para dar independencia a la prótesis que se realice.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
Aparte se podria realizar un ajuste a la bateria, para alargar la duracion de
trabajo de la prótesis y También que pueda ser autosostenible con algun tipo
de energia alternativa.
CONCLUSIONES
Esta prótesis abre muchas puertas al desarrollo de nuevos modelos
mioelectricos, con el uso de la impresora 3D que es un material de bajo costo.
Esto ayuda a impulsar el mercado de este tipo ya que es adsequible a
cualquier tipo de persona.
Ya que la prótesis tiene que ser diseñada a medida para cada persona, los
archivos tipo .stl que se encuentran en sitios web publicos y que cualquier
persona puede editar, la idea de que cada persona que tenga algun tipo de
mutilacion obtenga su prótesis de manera muy simple estaria mas cerca de
que sea una realidad.
Para tener una mejor adquisición de la señal se podria cambiar el tipo de
electrodos por unos internos, se sabe que estos electrodos tienen que ser

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
aplicados por un doctor pero llevara a que los impulsos electricos sean mas
altos y que el ruido externo no afecte la adquisición de la señal de manera
grave.
BIBLIOGRAFIA
[1] “Las manos representan el mayor número de accidentes laborales en el país
- Archivo Digital de Noticias de Colombia y el Mundo desde 1.990 - eltiempo.com.”
[Online]. Available: http://www.eltiempo.com/archivo/documento/CMS-7828955.
[Accessed: 08-Mar-2017].
[2] C. R. Torres-San-Miguel, A. Tonatiu Velázquez-Sánchez, E. Lugo-González,
and R. Tapia-Herrera, “Diseño personalizado de una interfaz mioeléctrica para una
prótesis de miembro superior Custom design of a myoelectric interface for upper
limb prostheses,” Rev. Colomb. Biotecnol. Diciembre, vol. XIII, no. 2, pp. 70–83,
2011.
[3] “La Era de la automatización.” [Online]. Available:
http://www.imagenzac.com.mx/nota/la-era-de-la-automatizacion-20-48-66.
[Accessed: 08-Mar-2017].
[4] S. Grafakos, F. Dimeas, and N. Aspragathos, “Variable Admittance Control in
pHRI using EMG-based Arm Muscles Co-Activation,” IEEE Int. Conf. Syst. Man,
Cybern., pp. 1–6, 2016.

----------------------------------------------------------------------------------------------------------------------------------- *Juan Pablo Gonzalez Daza. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] **Nicolás Stiven Liévano Guerrero. Estudiante Tecnología en Electrónica, Universidad Distrital, Colombia. E-mail: [email protected] ***Frank Nixon Giraldo Ramos. Profesor en la Universidad Distrital, Colombia. E-mail: [email protected]
[5] V. Eduardo and Q. Machado, “Control de una mano virtual usando señales
electromiográficas Control de una mano virtual usando señales electromiográficas,”
2010.
[6] J. M. Universidad CES. Escuela de Ingeniería de Antioquia., R. C. Acevedo,
and C. B. Tabernig, Revista EIA., no. 7. Escuela de Ingeniería de Antioquia, 2007.
[7] J. L. Loaiza, “Diseño y simulación de un prototipo de prótesis de mano
bioinspirada con cinco grados de libertad,” p. 187, 2012.
[8] J. Brito, M. Quinde, D. Cusco, and J. Calle, “Estudio del estado del arte de
las prótesis de mano,” Ingenius Rev. Cienc. y Tecnol., vol. 9, no. 2013, pp. 57–64,
2013.
[9] J. Manuel Dorador González, P. Ríos Murillo, I. Flores Luna, and A. Juárez
Mendoza, “Robótica Y Prótesis Inteligentes,” Rev. Digit. Univ. Número, vol. 18, no.
1, pp. 1067–6079, 2004.
[10] C. A. Quinayás-Burgos, M. Muñoz-Añasco, O. A. Vivas-Albán, and C. A.
Gaviria-López, “Diseño y construcción de la prótesis robótica de mano UC-1,” Ing. y
Univ., vol. 14, no. 2, pp. 223–237, 2010.