
DENOMINACIÓN DEL PROYECTO DESARROLLO DE …
49
Propuesta de Proyecto Aula TECNALIA 2017-2018 27/07/2017 1/2 DENOMINACIÓN DEL PROYECTO DESARROLLO DE CONTROLADOR PARA ATERRIZAJE SEGURO DE QUADCÓPTERO EN CASO DE FALLO DE UNO DE LOS MOTORES O PÉRDIDA DE HÉLICE CENTRO PROMOTOR DEL PROYECTO Y TUTOR Centro: TECNALIA (División Industria y Transporte, Departamento Aeronáutica y Espacio) Tutor: Iñaki Iglesias DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento à Dpt Ingeniería de Sistemas y Automática Tutor/a à Itziar Cabanes PERFIL DEL/A CANDIDATO/A Titulación Ingeniero con especialidad en Control, realizando postgrado. Idiomas Inglés Otros conocimientos Conocimiento de entorno de desarrollo Matlab-Simulink DESCRIPCIÓN DEL PROYECTO Los quadcópteros ligeros son utilizados actualmente para diversas tareas (vigilancia, ocio, supervisión), pero el uso de solo cuatro motores-hélices consigue ventajas como el menor peso o precio, a costa de minimizar la redundancia que permite un vuelo más seguro. Hasta ahora, la única forma de que un multicóptero pudiera sobrevivir a la pérdida de una hélice o motor era tener redundancia (como por ejemplo los hexacópteros u octocópteros). Utilizando un control adecuado se puede llevar al quadcóptero a un modo seguro en el que pueda realizar un aterrizaje de emergencia, evitando por lo tanto una situación catastrófica que suele casi siempre acarrear daños en el quadcóptero. Ver ejemplo aquí: https://youtu.be/bsHryqnvyYA En este proyecto se desarrollará por lo tanto el control robusto de la propulsión distribuida de un quadcóptero ligero, de modo que permita el aterrizaje seguro del quadcóptero en caso de fallo de uno de los motores, basándose en un quadcóptero programable que se identificará dentro de una de las tareas iniciales del proyecto. El controlador a prueba de fallos utilizará sólo hardware disponible en un quadcóptero estándar, y que por lo tanto pueda ser implementado en el futuro en quadcópteros existentes simplemente a través de una actualización de software. La plataforma de control RT (así como las características de la aeronave) serán definidos durante el proyecto y el entorno software con la que se desarrollara el control será Matlab-Simulink a no ser que se identifique un entorno más adecuado durante el análisis. También se seleccionará un entorno visual de simulación adecuado. Por lo tanto, el proyecto consta de las siguientes tareas principales: • Definición de la plataforma hardware y software del proyecto. Aquí se identificarán tanto el quadcóptero adecuado (por prestaciones necesarias y capacidad de programación) como el software tanto de desarrollo del control como de visualización, así como el sistema de detección y posicionamiento de los drones en interior. Básicamente se trata de la definición de toda la plataforma de simulación y desarrollo (hardware y software).
Transcript of DENOMINACIÓN DEL PROYECTO DESARROLLO DE …
PropuestadeProyectoAulaTECNALIA2017-2018
27/07/2017 1/2
DENOMINACIÓN DEL PROYECTO DESARROLLO DE CONTROLADOR PARA ATERRIZAJE SEGURO DE QUADCÓPTERO EN CASO DE FALLO DE UNO DE LOS MOTORES O PÉRDIDA DE HÉLICE CENTRO PROMOTOR DEL PROYECTO Y TUTOR Centro: TECNALIA (División Industria y Transporte, Departamento Aeronáutica y Espacio) Tutor: Iñaki Iglesias DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento à Dpt Ingeniería de Sistemas y Automática Tutor/a à Itziar Cabanes PERFIL DEL/A CANDIDATO/A Titulación Ingeniero con especialidad en Control, realizando postgrado. Idiomas Inglés Otros conocimientos Conocimiento de entorno de desarrollo Matlab-Simulink DESCRIPCIÓN DEL PROYECTO Los quadcópteros ligeros son utilizados actualmente para diversas tareas (vigilancia, ocio, supervisión), pero el uso de solo cuatro motores-hélices consigue ventajas como el menor peso o precio, a costa de minimizar la redundancia que permite un vuelo más seguro. Hasta ahora, la única forma de que un multicóptero pudiera sobrevivir a la pérdida de una hélice o motor era tener redundancia (como por ejemplo los hexacópteros u octocópteros). Utilizando un control adecuado se puede llevar al quadcóptero a un modo seguro en el que pueda realizar un aterrizaje de emergencia, evitando por lo tanto una situación catastrófica que suele casi siempre acarrear daños en el quadcóptero. Ver ejemplo aquí: https://youtu.be/bsHryqnvyYA En este proyecto se desarrollará por lo tanto el control robusto de la propulsión distribuida de un quadcóptero ligero, de modo que permita el aterrizaje seguro del quadcóptero en caso de fallo de uno de los motores, basándose en un quadcóptero programable que se identificará dentro de una de las tareas iniciales del proyecto. El controlador a prueba de fallos utilizará sólo hardware disponible en un quadcóptero estándar, y que por lo tanto pueda ser implementado en el futuro en quadcópteros existentes simplemente a través de una actualización de software. La plataforma de control RT (así como las características de la aeronave) serán definidos durante el proyecto y el entorno software con la que se desarrollara el control será Matlab-Simulink a no ser que se identifique un entorno más adecuado durante el análisis. También se seleccionará un entorno visual de simulación adecuado. Por lo tanto, el proyecto consta de las siguientes tareas principales:
• Definición de la plataforma hardware y software del proyecto. Aquí se identificarán tanto el quadcóptero adecuado (por prestaciones necesarias y capacidad de programación) como el software tanto de desarrollo del control como de visualización, así como el sistema de detección y posicionamiento de los drones en interior. Básicamente se trata de la definición de toda la plataforma de simulación y desarrollo (hardware y software).
PropuestadeProyectoAulaTECNALIA2017-2018
27/07/2017 2/2
• Revisión del Estado del Arte y desarrollo del control y puesta a punto en simulación. • Puesta en marcha con el quadcóptero real, demostración del concepto, documentación de las
pruebas y conclusiones. Tareas: Tarea 1 Definición de la plataforma hardware y software del proyecto Tarea 2 Revisión del Estado del Arte y desarrollo del control basado en
aprendizaje reforzado Tarea 3 Pruebas y demostración en entorno real con trayectorias predefinidas Tarea 4 Informe final Todo el hardware necesario para la realización de estas tareas será suministrado por Tecnalia, y las pruebas en entorno real se realizarán en el Flying Robot Lab de Tecnalia (Donostia). Periodo del proyecto: XXX., a comenzar en Septiembre 2017.

PropuestadeProyectoAulaTECNALIA2017-2018
27/07/2017 1/2
DENOMINACIÓN DEL PROYECTO DESARROLLO DE CONTROLADOR BASADO EN APRENDIZAJE REFORZADO PARA QUADCÓPTERO CENTRO PROMOTOR DEL PROYECTO Y TUTOR Centro: TECNALIA (División Industria y Transporte, Departamento Aeronáutica y Espacio) Tutor: Iñaki Iglesias DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento à Dpt Ingeniería de Sistemas y Automática Tutor/a à Asier Zubizarreta PERFIL DEL/A CANDIDATO/A Titulación Ingeniero con especialidad en Control, realizando postgrado. Idiomas Inglés Otros conocimientos Conocimiento de entorno de desarrollo Matlab-Simulink DESCRIPCIÓN DEL PROYECTO Los quadcópteros son actualmente una plataforma popular para la investigación de vehículos aéreos no tripulados (UAV), debido a su simplicidad de construcción y mantenimiento. Un quadcóptero tiene cuatro rotores situados en las cuatro esquinas de un bastidor y controlados cambiando la velocidad de rotación de los mismos. Sin embargo el sistema en un sistema no lineal y habitualmente difícil de controlar en trayectorias agresivas. La mayoría del trabajo en esta área se centra en el diseño de controladores que derivan de una linealización del sistema, y que solo son estables bajo condiciones de bajos ángulos de roll y pitch. Los métodos de control avanzados como la linealización retroalimentada, el control adaptativo, el control deslizante o el control robusto dependen fuertemente de la existencia de un modelo de planta detallado que no siempre es posible disponer. En el presente proyecto se propone desarrollar un control que permita manejar un quadcóptero de forma precisa cuando la dinámica del sistema no es bien conocida, la linealización conduce a modelos de planta imprecisos, o cuando tenemos un sistema muy inestable o estocástico. Estos escenarios presentan desafíos que son difíciles de abordar con las metodologías de control convencionales. A continuación se presentan dos ejemplos: https://www.youtube.com/watch?v=yx6m6JEzlX4 https://www.youtube.com/watch?v=T0A9voXzhng En este proyecto se desarrollará por lo tanto el control de un quadcóptero ligero basado en aprendizaje reforzado, de modo que permita el seguimiento de trayectorias sencillas, basándose en un quadcóptero programable que se identificará dentro de una de las tareas iniciales del proyecto. El controlador utilizará sólo hardware disponible en un quadcóptero estándar, y que por lo tanto pueda ser implementado en el futuro en quadcópteros existentes simplemente a través de una actualización de software. La plataforma de control RT (así como las características de la aeronave) serán definidos durante el proyecto y el entorno software con la que se desarrollara el control será Matlab-Simulink a no ser que se

PropuestadeProyectoAulaTECNALIA2017-2018
27/07/2017 2/2
identifique un entorno más adecuado durante el análisis. También se seleccionará un entorno visual de simulación adecuado. Por lo tanto, el proyecto consta de las siguientes tareas principales:
• Definición de la plataforma hardware y software del proyecto. Aquí se identificarán tanto el quadcóptero adecuado (por prestaciones necesarias y capacidad de programación) como el software tanto de desarrollo del control como de visualización, así como el sistema de detección y posicionamiento de los drones en interior. Básicamente se trata de la definición de toda la plataforma de simulación y desarrollo (hardware y software).
• Revisión del Estado del Arte y desarrollo del control y puesta a punto en simulación. • Puesta en marcha con el quadcóptero real, demostración del concepto, documentación de las
pruebas y conclusiones. Tareas: Tarea 1 Definición de la plataforma hardware y software del proyecto Tarea 2 Revisión del Estado del Arte y desarrollo del control Tarea 3 Pruebas y demostración en entorno real Tarea 4 Informe final Todo el hardware necesario para la realización de estas tareas será suministrado por Tecnalia, y las pruebas en entorno real se realizarán en el Flying Robot Lab de Tecnalia (Donostia). Periodo del proyecto: XXX., a comenzar en Septiembre 2017.

PropuestadeProyectoAulaTECNALIA2017-2018
27/07/2017 1/2
DENOMINACIÓN DEL PROYECTO DESARROLLO DE HERRAMIENTA EN MATLAB-SIMULINK PARA SIMULACIÓN DE HUSILLO A BOLAS PARA EMA Y OBTENCIÓN DE REQUISITOS DE DISEÑO CENTRO PROMOTOR DEL PROYECTO Y TUTOR Centro: TECNALIA (División Industria y Transporte, Departamento Aeronáutica y Espacio) Tutor: Iñaki Iglesias DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento à Dpt Ingeniería Mecánica Tutor/a à Charles Pinto PERFIL DEL/A CANDIDATO/A Titulación Ingeniero con especialidad en Mecánica, realizando postgrado. Idiomas Inglés Otros conocimientos Conocimiento de entorno de desarrollo Matlab-Simulink. DESCRIPCIÓN DEL PROYECTO La electrificación de los diferentes sistemas y subsistemas de la aeronave permite aumentar la seguridad, la eficiencia y reducir las emisiones. La tendencia MEA (More Electric Aircraft) en el sector aeronáutico está logrando que paulatinamente se vayan electrificando diferentes sistemas de la aeronave, y los primeros elementos en los que se ha aplicado esta electrificación ha sido en los actuadores hidráulicos existentes para mover diferentes elementos como trenes de aterrizaje, alerones o spoilers. Los EMAs (Electro Mechanical Actuators) permiten lograr las mismas características en el movimiento longitudinal que los cilindros hidráulicos, mediante el uso de un motor eléctrico y un husillo a bolas que convierte el movimiento rotativo en lineal.
Imagen 1: Ejemplo de actuador para tren de aterrizaje de avión regional.
En este proyecto se desarrollará un modelo basado en Matlab-Simulink que permita una especificación de requisitos preliminares a la hora de desarrollar un husillo a bolas para una aplicación aeronáutica. Para ello los parámetros de entrada serán curvas posición lineal vs. Tiempo, fuerza vs. Tiempo, y las salidas a obtener serán el Par vs. Tiempo la Velocidad Angular vs. Tiempo, y una estimación de vida con el ciclo de entrada, asá como una estimación de la corriente necesaria en el motor para cumplir con el cuaderno de cargas de entrada. De forma más detallada el proyecto constará de las siguientes tareas:
PropuestadeProyectoAulaTECNALIA2017-2018
27/07/2017 2/2
• Análisis de los parámetros de entrada al problema para poder evaluar en la siguiente tarea los
modelos más adecuados a implementar en la herramienta software. Permitirá de una forma sencilla la simulación de determinadas variantes de husillos a bolas de cara a poder calcular como salida del software y como mínimo, el Par-Tiempo, la Velocidad Angular-Tiempo, una estimación de vida y una estimación de la Corriente-Tiempo si utilizáramos un motor eléctrico simplificado genérico. Todo esto para un ciclo de entrada Posición Lineal-Fuerza-Tiempo.
• Revisión del estado del arte en modelado de husillos, viendo cual es la mejor aproximación a la hora de modelar husillos para la aplicación propuesta, y evaluando el grado de refinamiento necesario del modelo teniendo en cuenta los parámetros de entrada-salida del problema. En esta tarea se seleccionarán los parámetros a modelar con más precisión (como por ejemplo la fricción, el amortiguamiento, la rigidez, holgura o el escalado de las características del husillo con las dimensiones del mismo) y los modelos más adecuados a utilizar en la aplicación.
• Modelado en Matlab-Simulink, consiguiendo finalmente una herramienta que permita de forma
sencilla la introducción de los datos del husillo y el ciclo de funcionamiento y permita obtener los resultados esperados mencionados en el primer punto. Puesta a punto del modelo y evaluación de los resultados.
• Documentación, conclusiones e informe final. Tareas:
Tarea 1 Análisis del problema y parámetros de entrada/salida. Objetivo del modelo.
Septiembre-Octubre 2017
Tarea 2 Revisión del Estado del Arte y selección de modelos y estrategia de modelado.
Octubre 2017
Tarea 3 Modelado en Matlab-Simulink, puesta a punto del modelo y evaluación de los resultados.
Noviembre-Diciembre 2017
Tarea 4 Informe final Enero-Febrero 2018
Todo el hardware necesario para la realización de estas tareas será suministrado por Tecnalia. Periodo del proyecto: XXX., a comenzar en Septiembre 2017.

PropuestadeProyectoAulaTECNALIA2017-2018
20/07/2017 1/2
DENOMINACIÓN DEL PROYECTO ImplementaciónymejoradesistemadeposicionamientobasadoenLidar360ysensorespropioceptivos CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA (Industria y Transporte, Automoción) xxxx DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento à Dpt Ingeniería de Sistemas y Automática Tutor/a à Fernando Artaza PERFIL DEL/A CANDIDATO/A Titulación Ingeniero de Telecomunicaciones con especialidad en telemática, en último curso o realizando postgrado. Idiomas Inglés Otros conocimientos Conocimiento en programación C/C++ Soltura para desarrollo de software en entorno Linux+Eclipse Algoritmia y estructuras de datos. DESCRIPCIÓN DEL PROYECTO El presente proyecto se centra dentro de los conocidos Sistemas Inteligente de Transporte (ITS). El objetivo del proyecto consiste en implementar o mejorar un algoritmo SLAM (Simultaneous Location and Mapping – Localización y Mapeado Simultáneos) basado en un Lidar multicapa con cobertura 360º (Velodyne VLP16), complementándolo con información de otros sensores como una IMU (Inertial Measure Unit) o GPS. Justificación Los retos marcados en las investigaciones, tanto de sistemas de navegación como de control en vehículos sin conductores en entornos urbanos dinámicos requieren mayores consideraciones. Hasta ahora, muchas de las capacidades para evitar accidentes con potenciales obstáculos, así como para realizar maniobras cooperativas entre vehículos automatizados han sido limitadas por el poco alcance de las propuestas, y los mayores esfuerzos para su realización e implementación en entornos urbanos reales son cada vez más necesarios. Objetivo general Elaborar un sistema de posicionamiento para vehículos automatizados en entornos estructurados. El sistema se basará en un sensor Lidar de 360º complementado con otros sensores como IMU y GPS. Estos sensores se aplicarán para mejorar una solución de SLAM ya existente o crear una nueva. Objetivos específicos El trabajo se compone de las siguientes tareas:
- Estudio de diferentes técnicas para ubicación y mapeado, e.g SLAM y odometría. Prueba de herramientas como ROS y Simulink.
- Lectura de sensores y preprocesado de los datos.

PropuestadeProyectoAulaTECNALIA2017-2018
20/07/2017 2/2
- Mejora de un algoritmo SLAM ya existente, mediante adición de nuevos sensores. - Realización de pruebas en entorno simulado: circuito cerrado con obstáculos estáticos - Realización de pruebas sobre prototipo real (vehiculó eléctrico). Posible extensión a validación de
funcionalidades autónomas del vehículo que hagan uso de SLAM. Fases del Proyecto
- Fase 1: Estudio de técnicas de SLAM - Fase 2: Implementación y validación en ROS (simulación) - Fase 3: Implementación en vehículos - Fase 4: Pruebas - Fase 5: Documentación
Cronograma: (Modelo para Proyecto de Grado a Dedicación Exclusiva
Fases 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Fase 1
Fase 2
Fase 3
Fase 4
Fase 5
Documentación
Para la realización de estas tareas se suministrarán grabaciones de datos de los sensores. De manera opcional se podrá ceder temporalmente el conjunto de sensores. Las pruebas en entorno real pueden requerir desplazamiento a las instalaciones de Tecnalia en el Parque Científico y Tecnológico de Derio. Periododelproyecto:1año.

PropuestadeProyectoAulaTECNALIA2017-2018
20/07/2017 1/3
DENOMINACIÓN DEL PROYECTO Integración de un modelo físico de vehículo en plataforma de simulación para desarrollo de vehículos automatizados. CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA (Industria y Transporte, Automoción) Enrique Martí Muñoz DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento à Dpt Ingeniería de Sistemas y Automática Tutor/a à Eva Portillo PERFIL DEL/A CANDIDATO/A Titulación Ingeniero de Telecomunicaciones con especialidad en telemática, en último curso o realizando postgrado. Ingeniero en Informática, en último curso o realizando postgrado. Idiomas Inglés Otros conocimientos Conocimientos de programación C/C++/Matlab. Soltura en desarrollo de software. Valorable nociones de procesado 3D (nubes de puntos, mallas). DESCRIPCIÓN DEL PROYECTO El presente proyecto se centra dentro de los conocidos Sistemas Inteligente de Transporte (ITS). Su objetivo consiste en integrar un modelo de vehículo en una plataforma comercial de simulación enfocada a ITS. Justificación El grupo de Automated Driving (AD) de Tecnalia (perteneciente a la división Industria y Transporte) trabaja en el desarrollo de sistemas de ayuda a la conducción y en conducción autónoma. Los proyectos en el ámbito europeo requieren colaboración activa con otros grupos de investigación y empresas, y por tanto la convergencia hacia un conjunto de herramientas común. Se espera que la integración de Dynacar en un producto como PreScan acelere todas las líneas de la investigación de Tecnalia en conducción autónoma, reduciendo el esfuerzo necesario para incluir nuevos sensores o vehículos, además de permitir crear escenarios que involucren riesgo para la integridad del vehículo o sus ocupantes. También puede tener ventajas secundarias: al ser PreScan una herramienta muy usada, aumentan las posibilidades de colaboración con otros grupos de investigación y empresas del sector. Por otro lado, puede mejorar la posición de Dynacar en el mercado. Objetivo general Integración de las herramientas Dynacar y PreScan para permitir su funcionamiento conjunto en escenarios de conducción automatizada/autónoma. El modelo de vehículo Dynacar1 es una herramienta desarrollada por Tecnalia en el marco de sus proyectos de investigación y desarrollos para clientes. Representa un modelo completo del vehículo, desde el nivel físico hasta el comportamiento de los componentes mecánicos y eléctricos. 1 www.dynacar.es

PropuestadeProyectoAulaTECNALIA2017-2018
20/07/2017 2/3
PreScan2 es una plataforma de simulación para ITS usado por universidades, centros de investigación y fabricantes de vehículos de todo el mundo. Sus aplicaciones abarcan el desarrollo de sistemas de emergencia, ayuda a la conducción, vehículos automatizados y redes de comunicación vehiculares.
Figura 1 Dynacar puede usarse para acelerar el desarrollo de vehículos. En las figuras, modelado de prototipo eléctrico.
Figura 2 Capturas de PreScan en escenarios de mantenimiento automático de carril y frenada de emergencia.
Una integración completa permitirá: • Que PreScan use la simulación física de Dynacar para calcular el comportamiento dinámico de un vehículo • Que Dynacar y otras herramientas externas se alimenten de los sensores simulados por PreScan.
Objetivos específicos Fases del Proyecto
- Fase 1: Estudio de las herramientas PreScan y Dynacar. - Fase 2: Diseño+desarrollo de SW que permita a PreScan usar el modelo de vehículo Dynacar. - Fase 3: Creación de escenarios de prueba - Fase 4: Ejecución de tests de aceptación. - Fase 5: Documentación
Cronograma: (Modelo para Proyecto de Grado a Dedicación Exclusiva)
Fases 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Fase 1
Fase 2
Fase 3
Fase 4
Fase 5
2 www.tassinternational.com/prescan

PropuestadeProyectoAulaTECNALIA2017-2018
20/07/2017 3/3
Para la realización de estas tareas se suministrará documentación inicial y software necesario. Periododelproyecto:1año.

PropuestadeProyectoAulaTECNALIA2017-2018
20/09/2017 1/2
DENOMINACIÓN DEL PROYECTO Modelado geométrico y predicción de trayectorias para vehículos de grandes dimensiones no articulados. CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA (Industria y Transporte, Automoción) José Ángel Matute DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento à DptoIngenieríadeSistemasyAutomática Tutor/a à Vicente Gómez PERFIL DEL/A CANDIDATO/A Titulación Ingeniero de Telecomunicaciones con especialidad en telemática, en último curso o realizando postgrado. Ingeniero en Informática, en último curso o realizando postgrado. Idiomas Inglés Otros conocimientos Conocimientos de programación C/C++/Matlab (cualquiera). DESCRIPCIÓN DEL PROYECTO El presente proyecto se centra dentro de los conocidos como Sistemas Inteligente de Transporte (ITS). Su objetivo consiste en desarrollar un modelo computacional para el cálculo de trayectorias en vehículos de grandes dimensiones. Este modelo servirá como base para un planificador de trayectorias, que forma parte del sistema de conducción automatizada desarrollado por Tecnalia. Justificación El grupo de Automated Driving (AD) de Tecnalia (perteneciente a la división Industria y Transporte) trabaja en el desarrollo de sistemas de ayuda a la conducción y en conducción autónoma. Actualmente, los esfuerzos más notables en el área tienen como objetivo vehículos pequeños (turismos, compactos) y se centran en escenarios de conducción con poca complejidad, como control de crucero y mantenimiento de carril en autopista.
Las maniobras de vehículos largos son complejas y presentan un reto para la conducción automatizada a todos
los niveles: manejo del vehículo, interacción con el tráfico y respeto de las normas viales.

PropuestadeProyectoAulaTECNALIA2017-2018
20/09/2017 2/2
Estos esfuerzos, sin embargo, no resuelven algunos de los problemas que aparecen al tratar con vehículos grandes realizando maniobras en entornos más complejos como ciudades o centros de carga. Un ejemplo típico es el de un camión tomando una rotonda pequeña, donde debe ocupar varios carriles simultáneamente para que el eje trasero del vehículo no se salga de la vía. Este proyecto ayuda a dar respuesta a algunos de los retos más interesantes y de más provecho para la sociedad, como la automatización del transporte público, del movimiento de mercancías o de la recogida de basuras. Objetivo general Diseñar y desarrollar una herramienta de software que, partiendo de la descripción de un vehículo (dimensiones, ejes, articulaciones), calcule por dónde pasan sus ruedas al realizar una serie de maniobras a baja velocidad. Esta herramienta será utilizada para la planificación/optimización automática de trayectorias, por lo que se dará prioridad a la eficiencia computacional frente a la fidelidad del modelo (velocidad vs. precisión). El modelo resultante será validado usando el simulador físico de vehículos Dynacar1, desarrollado por Tecnalia en el marco de sus proyectos de investigación y desarrollos para clientes, que representa un modelo multicuerpo donde se considera el comportamiento de los distintos componentes que influyen en la dinámica del vehículo.
Vehículos automatizados de grandes dimensiones requieren de una planificación de trayectoria particular
Objetivos específicos Fases del Proyecto
- Fase 1: Estudio del estado del arte y propuesta de soluciones. - Fase 2: Implementación y prueba de prototipos. - Fase 3: Selección e implementación de una solución. - Fase 4: Ejecución de tests de aceptación. - Fase 5: Documentación
Cronograma: (Modelo para Proyecto de Grado a Dedicación Exclusiva)
Fases 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Fase 1
Fase 2
Fase 3
Fase 4
Fase 5
Para la realización de estas tareas se suministrará documentación inicial y software necesario. Periododelproyecto:1año.
1 www.dynacar.es
Propuesta de Proyecto Aula TECNALIA 2017-2018
20/09/2017 1/2
DENOMINACIÓN DEL PROYECTO Verificación y validación de un modelo simplificado para maniobras de control en vehículos automatizados. CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA (Industria y Transporte, Automoción) José Ángel Matute DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento � Dpto Ingeniería de Sistemas y Automática Tutor/a � Asier Zubizarreta PERFIL DEL/A CANDIDATO/A Titulación Ingeniero Mecánico o Industrial, en último curso o realizando postgrado. Idiomas Inglés Otros conocimientos Conocimientos de programación Matlab/Simulink (cualquiera). Instrumentación y adquisición de datos. DESCRIPCIÓN DEL PROYECTO El presente proyecto se centra dentro de los conocidos como Sistemas de Transporte Inteligente (ITS). Su objetivo consiste en verificar y validar la configuración de un modelo simplificado de vehículos (bicicleta) desarrollado previamente en Matlab/Simulink. Este proyecto servirá para evaluar el alcance del modelo y su aplicación en algoritmos de maniobras de control en vehículos automatizados desarrollados por Tecnalia. Justificación El grupo de Automated Driving (AD) de Tecnalia (perteneciente a la división Industria y Transporte) trabaja en el desarrollo de sistemas de ayuda a la conducción y en conducción autónoma. Actualmente, los esfuerzos más notables en el área tienen como objetivo vehículos pequeños centrados en escenarios de conducción de complejidad variable. Los algoritmos de control requieren de modelos simplificados que optimicen el tiempo de cálculo requerido por el ordenador. Objetivo general Evaluar y mejorar un modelo de vehículos simplificado que partiendo de las variables físicas de la plataforma de pruebas y su entorno, permita realizar una serie de maniobras a baja velocidad. Esta herramienta será utilizada para el control predictivo basado en modelos (MPC). El modelo resultante será verificado utilizando el simulador comercial de vehículos Dynacar1, desarrollado por Tecnalia en el marco de sus proyectos de investigación y desarrollos para clientes. Igualmente, el modelo será validado a través de un vehículo real instrumentado (Figura 1). Esto con el propósito de determinar la confiabilidad del modelo simplificado frente a modelos más complejos y experimentales.
1 www.dynacar.es

Propuesta de Proyecto Aula TECNALIA 2017-2018
20/09/2017 2/2
Figura 1 Maniobras de control son probadas actualmente tanto en plataformas de simulación (Dynacar) como
en experimentos en vehículos totalmente instrumentados para ser automatizados.
Objetivos específicos Fases del Proyecto
- Fase 1: Estudio del estado del arte y modelo actual. - Fase 2: Desarrollo del protocolo de pruebas. - Fase 3: Pruebas en ambientes de simulación. - Fase 4: Pruebas experimentales. - Fase 5: Documentación
Cronograma: (Modelo para Proyecto de Grado a Dedicación Exclusiva)
Fases 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Fase 1
Fase 2
Fase 3
Fase 4
Fase 5
Para la realización de estas tareas se suministrará documentación inicial y software necesario.
Periodo del proyecto: 1 año.

Objetivos proyecto láser Aula Tecnalia 2017-2018
22/09/2017

proceso de cara a ajustar los parámetros de proceso para obtener un calentamiento uniforme y adecuado a los materiales de unión. El objetivo final será por un lado, generar diferentes tipos de texturas adaptada en cada caso a la capacidad de fluir del material compuesto en geometrías representativas, y por otro, la simulación numérica del campo térmico de cara a la optimización de la estrategia de unión. De este modo el estudio se llevará a cabo combinando una doble vía, la vía experimental y la vía teórica. Así, en el presente proyecto se propone:
• Estudiar el proceso de unión de materiales disímiles mediante láser. • Estudiar la influencia del texturizado, simulando el campo térmico generado y la unión en la intercara composite-metal. • Simulación, predicción y análisis de los principales parámetros y optimización del proceso de unión láser para diferentes materiales. • Estudio de las propiedades mecánicas de las uniones resultantes. • Estudiar la profundidad de capa fundida y distorsiones térmicas que introducen estos procesos.
TAREAS: - Análisis de especificaciones y selección de materiales sometidos a estudio - Diseño de experimentación y preparación de probetas para texturizado - Realización de ensayos de texturizado en diferentes superficies y geometrías - Predicción del campo térmico en la intercara de unión mediante LATHEM: Mejora del modelo - Correlación de la herramienta de simulación con los datos experimentales - Difusión de resultados DURACIÓN: 1 curso MEDIOS: - Láser de CO2 DC025 ROFIN, Láser de Diodos DL031Q ROFIN, Láser de Diodos 200W Novolas, Láser de fibra FL010 ROFIN, Láser Trufiber200 de TRUMPF, Láser pulsado de fibra Trumark 5050 de Trumpf - Perfilómetro 3D Taylor Hobson, Perfilómetro LEICA DCM3D, escáner 2D y 3D (Disponible) - Licencia Matlab (Disponible), Openfoam - Licencia de NX10 (Disponible)
PROYECTO: LÁSER TÍTULO: Procesos innovadores de uniones disímiles mediante láser PROFESOR UPV: Eneko Ukar TUTOR TECNALIA: Fernando Liébana OBJETIVO: La unión de materiales disímiles es uno de los procesos más innovadores que permiten la fabricación de
componentes híbridos composite-metal con elevadas ratios rigidez/peso. Se trata de un proceso complejo en el que la selección de los parámetros óptimos resulta determinante. Continuando con la labor realizada en ediciones anteriores, se plantea dar el salto a uniones de geometrías complejas y avanzar en la simulación del
Aula Tecnalia. 2017-2018. Objetivos proyecto láser

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
ControldeconvertidoresdepotenciautilizandoModelBasedControldeconvertidoresdepotenciautilizandoModelBasedDesignDesign
DENOMINACIÓN DEL PROYECTO
Control de convertidores de potencia utilizando Model Based Design (MBD)
CENTRO PROMOTOR DEL PROYECTO Y TUTOR
TECNALIA/ Área de Redes inteligentes y almacenamiento
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS
Departamento: Tecnología Electrónica, grupo de investigación APERT. Tutor: Íñigo Kortabarria
PERFIL DEL/A CANDIDATO/A
Idiomas: • Inglés
Otros conocimientos • Electrónica de potencia • Matlab • Desarrollo Firmware para microprocesadores
DESCRIPCIÓN DEL PROYECTO
Introducción:
El desarrollo de sistemas de control basado en modelos MBD, permite acelerar los procesos de desarrollo actuales. Su principal ventaja consiste en el paso directo de los modelos al hardware de control, reduciendo así los tiempos de desarrollo. Otra de las ventajas reside en disponer de un mayor control sobre el código y la posibilidad de realizar cambios de forma más sencilla.
La mejora de la generación automática de código que permite este paso directo, hace que esta técnica de diseño resulte muy interesante para el desarrollo de equipos de electrónica de potencia. No obstante, algunos de los retos de esta técnica son la fiabilidad y los tiempos de ejecución.
Mediante este proyecto se pretende analizar la viabilidad de esta técnica en un convertidor ya desarrollado por TECNALIA y cuyo control se implementó de forma tradicional, es decir de forma independiente a los modelos.
En la anualidad 2016-2017 se trabajó en esta área de conocimiento en el Aula Tecnalia y en 2017-2018 se plantea la continuación del trabajo iniciado.
Objetivos:
El objetivo principal es validar el control de un convertidor de potencia desarrollado por TECNALIA utilizando MBD y analizar las ventajas que este método aporta.
Se empleará una plataforma de convertidor back-to-back utilizada y validada anteriormente en Tecnalia. Sobre esta plataforma hardware se finalizará la puesta en marcha de las distintas partes de la plataforma para el funcionamiento de los dos convertidores utilizando MBD a través de Matlab, avanzada ya en la anualidad anterior. Se ejecutarán algoritmos de control en los convertidores programados con MBD.
Tareas principales:
• Familiarizarse con la plataforma hardware y con las herramientas de MBD de Matlab para el microprocesador de la plataforma.
• Familiarizarse con las partes de la plataforma ya desarrolladas mediante MBD: Entradas y salidas digitales, Medidas ADC externas…
• Poner en marcha las partes de la plataforma pendientes de desarrollar: medidas ADC internas, interfaces pendientes con FPGA…

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
• Programar y ejecutar algoritmos de control en los convertidores programados con MBD para validar el control de un convertidor de potencia y analizar las ventajas que este método aporta con respecto al control convencional.
PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
Energíasrenovablesenelmar:Análisisydiseñodesistemasdefondeoparadispositivosdegeneracióndeenergíamarina
DENOMINACIÓN DEL PROYECTO Energías renovables en el mar: Análisis y diseño de sistemas de fondeo para dispositivos de generación de energía marina CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA. Área Energía Offshore DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Ingeniería Mecánica Tutor: Victor Petuya PERFIL DEL/A CANDIDATO/A Idiomas Inglés Otros conocimientos Ingeniería mecánica con conocimientos de hidrodinámica o conceptos de ingeniería naval. Preferible familiaridad con software de cálculo (Matlab). DESCRIPCIÓN DEL PROYECTO
Introducción:
El mar es una fuente inagotable de energía en forma de viento, olas o corrientes marinas con una densidad energética mayor que la de otras energías renovables que no se está explotando a nivel comercial.
Actualmente existen varios conceptos en desarrollo de soluciones tanto de generación de energía del oleaje como de eólica marina. Algunos de ellos en fase de diseño conceptual y otros en fase de experimentación a diferentes escalas. La superficie en la que resulta viable la instalación de estos dispositivos anclados al fondo marino (<50m de profundidad) es muy limitada, por lo tanto muchos desarrollos se centran en soluciones flotantes, que requieren de sistemas de fondeo.
El coste de los sistemas de fondeo de estos dispositivos se estima de entre un 5% y un 10% el coste de la energía resultante, con lo cual un diseño apropiado de los sistemas de fondeo proporciona plantas más eficientes técnica y económicamente.
Existe una amplia experiencia en el diseño y análisis de líneas de sistemas de fondeo de la industria naval y del petróleo. Sin embargo, las características de las estructuras dedicadas a generación de energía renovable (diferente funcionalidad, emplazamiento y tamaño) hacen que algunos criterios genéricos de diseño puedan ser revisados.
El proyecto tratará por lo tanto de analizar el proceso de diseño de estas líneas con varios enfoques, desde los más simplificados (enfoque estático o cuasi-estático) a análisis más complejos, que incluyan efectos dinámicos, evaluando los efectos en función de las dimensiones de las estructuras, de su funcionalidad y de las propiedades del sistema de fondeo adoptado. El objetivo de esta línea de investigación será por tanto acotar la aplicabilidad de los métodos de análisis de sistemas de fondeo dentro de los procesos de diseño de estructuras flotantes de generación de energía marina.

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
Objetivos:
Una estructura flotante para generación de energía marina deberá tener un sistema de fondeo que le proporcione una dinámica horizontal apropiada. Las propiedades de las líneas así como sus puntos de anclaje condicionarán dicha dinámica de las estructuras flotantes.
Existen varias normativas de referencia en las que se pueden consultar los métodos de diseño de líneas y análisis de tensiones según los métodos empleados para los tamaños y requisitos habituales dentro de la industria naval tradicional. Sin embargo, dada la dinámica de las estructuras para generación de energía del oleaje y el tamaño de éstas y las de eólica flotante, más reducido, se tiende a utilizar líneas más livianas, cuya dinámica podría verse excitada en condiciones diferentes.
El objetivo principal del proyecto será por tanto modelar líneas de fondeo desde el punto de vista cuasi estático evaluando la bondad de éste método según los rangos de profundidad y fuerzas de excitación (proveniente de la dinámica de la estructura flotante fondeada). Se verificarán los datos obtenidos frente a tensiones derivadas de líneas dinámicas del software disponible en Tecnalia.
Tareas:
• Revisión de los tipos de tecnología marinas existentes (eólica offshore, olas, mareas) y profundización en la forma de obtención de la energía. Asimismo se hará una revisión del estado del arte de cálculo de dinámica de estructuras marinas y líneas de fondeo. Material proporcionado por Tecnalia.
• Modelo numérico de plataforma en un entorno de simulación hidrodinámica (AQWA, WAMIT, Nemoh…). Cálculo de fuerzas básicas, modelo global.
• Elaborar un modelo numérico de líneas cuasi estáticas e investigar la variación de las propiedades de las líneas para diferentes profundidades y fuerzas sobre el punto de anclaje con la estructura.
• Dada una estructura de generación de energía marina hacer un diseño global de sistema de fondeo (número de líneas, longitud, anclaje…).
• Simular numéricamente la estructura y el sistema de fondeo propuestos con fondeo linealizado y fondeo cuasi estático en estados de mar representativos de una localización dada. Evaluar diferencias e impacto en el diseño. Posibles propuestas de modificación del diseño.
• Simular los mismos casos en software numérico con líneas dinámicas, evaluar diferencias con simulaciones previas. Consideraciones sobre dinámica de líneas, frecuencia de oleaje y baja frecuencia.
• Revisar modelo FEM estructural proporcionado por Tecnalia. Extraer consideraciones globales sobre los campos de tensiones en los puntos de anclaje en la estructura de las líneas de fondeo, según los estados de mar analizados.
• Extraer conclusiones sobre los rangos de aplicación de los diferentes métodos de modelado.
Medios necesarios:
Licencia de software de cálculo Matlab. Podría requerir uso puntual de licencia de Orcaflex, aportada por Tecnalia.
PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
Energíasrenovablesenelmar:Estrategiasdecontrolavanzadasaplicadasacaptadoresdeenergíadelasolas
DENOMINACIÓN DEL PROYECTO Energías renovables en el mar: Estrategias de control avanzadas aplicadas para captadores de energía de las olas. CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA. Energía Off-shore DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Ingeniería de sistemas y automática Tutora: Marga Marcos PERFIL DEL/A CANDIDATO/A Idiomas Inglés Otros conocimientos Conocimientos de Automatización y Control. Familiaridad con software de cálculo (Matlab o similar). Diseño y programación de algoritmos de control. DESCRIPCIÓN DEL PROYECTO Introducción:
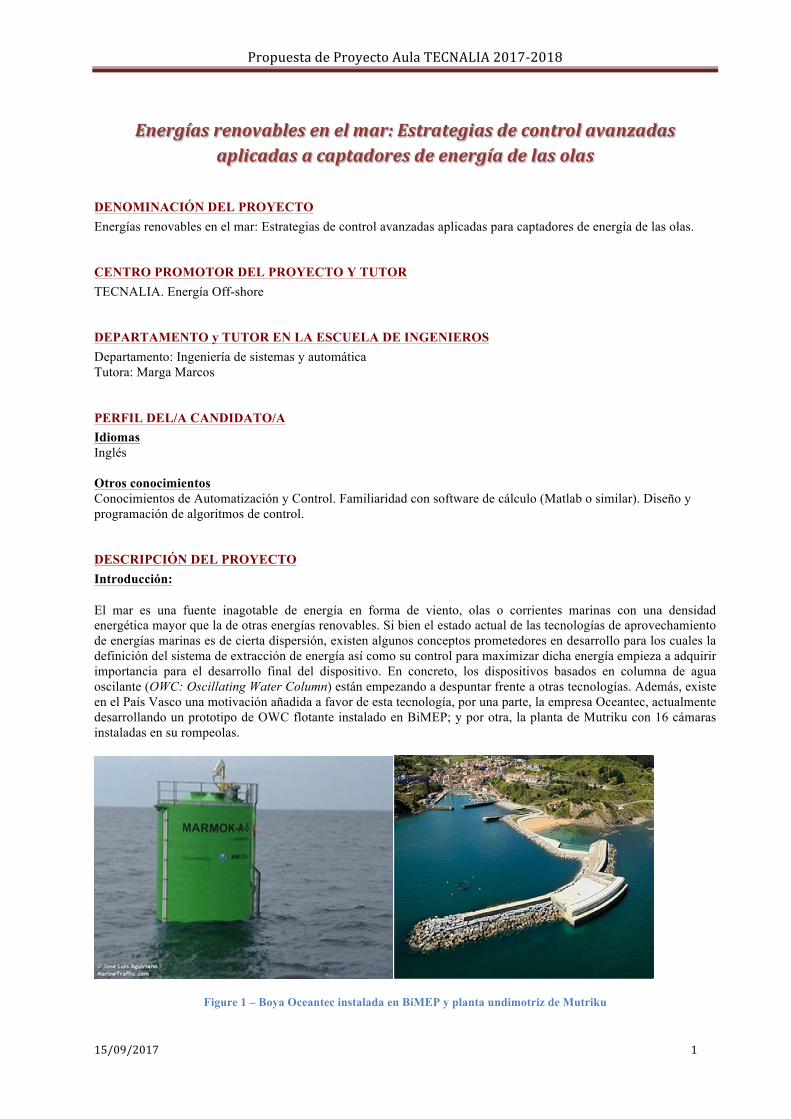
El mar es una fuente inagotable de energía en forma de viento, olas o corrientes marinas con una densidad energética mayor que la de otras energías renovables. Si bien el estado actual de las tecnologías de aprovechamiento de energías marinas es de cierta dispersión, existen algunos conceptos prometedores en desarrollo para los cuales la definición del sistema de extracción de energía así como su control para maximizar dicha energía empieza a adquirir importancia para el desarrollo final del dispositivo. En concreto, los dispositivos basados en columna de agua oscilante (OWC: Oscillating Water Column) están empezando a despuntar frente a otras tecnologías. Además, existe en el País Vasco una motivación añadida a favor de esta tecnología, por una parte, la empresa Oceantec, actualmente desarrollando un prototipo de OWC flotante instalado en BiMEP; y por otra, la planta de Mutriku con 16 cámaras instaladas en su rompeolas.
Figure 1 – Boya Oceantec instalada en BiMEP y planta undimotriz de Mutriku

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
Objetivos:
Desde hace varios años se está colaborando entre el departamento de automática y control con el área de energías marinas de TECNALIA. El objetivo de dicha colaboración es desarrollar modelos e implementar estrategias de control que permitan maximizar la energía extraída de captadores de energía de las olas y su conexión a red.
El proyecto global comprende el análisis del dispositivo OWC y el desarrollo de controles avanzados para la extracción de energía incrementando su rendimiento bajo una serie de restricciones que garanticen la fiabilidad del dispositivo en varias condiciones de mar. El objetivo parcial de este proyecto será trabajar en el control de velocidad de las turbinas de aire para mejorar la extracción de energía. Este tipo de tecnología se define por su rango de eficiencia limitado que se puede maximizar adoptando estrategias de control adecuadas. Conviene de estudiar las alternativas en términos de control para diseñar controladores maximizando la producción eléctrica teniendo en cuenta las restricciones debidas a los componentes. Se analizará también las necesidades de almacenamiento de energía para asegurar buena calidad de energía entregada a la red.
El proyecto se desarrolla en tres fases:
• Formación sobre tecnología OWC, conocimiento del modelo Wave-2-Wire
• Selección de estrategias avanzadas de control (control de par e velocidad con PI y antiwindup, control predictivo) incluyendo restricciones. Simulación y análisis de resultados de simulación.
• Experimentación en el banco de pruebas de TECNALIA.
Figure 2 - Conversión de energía OWC y banco de pruebas de TECNALIA
PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
ANÁLISIS TÉCNICOANÁLISIS TÉCNICO--ECONÓMICO DEECONÓMICO DETRANSFORMADORES DE CALOR PARA LATRANSFORMADORES DE CALOR PARA LAREVALORIZACION DE CALOR RESIDUAL DE BAJAREVALORIZACION DE CALOR RESIDUAL DE BAJATEMPERATURAENINDUSTRIATEMPERATURAENINDUSTRIA DENOMINACIÓN DEL PROYECTO Análisis técnico-económico de transformadores de calor para la revalorización de calor residual de baja temperatura. CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA. Área de Eficiencia Energética DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: MÁQUINAS Y MOTORES TÉRMICOS. Tutor: PERFIL DEL/A CANDIDATO/A Idiomas:
Inglés. Otros conocimientos:
• Transferencia de calor, • Fluidos térmicos, • Dominio Excel.
DESCRIPCIÓN DEL PROYECTO Introducción:
Actualmente, gran parte de los sectores industriales, producen grandes cantidades de calor residual que no es aprovechada, particularmente cuando este calor residual es de baja temperatura. En este sentido, en los últimos años, el transformador de calor (en inglés absorption heat transformer, AHT) está siendo objeto de estudio como una solución prometedora para la recuperación y revalorización del calor residual de la industria a baja temperatura. El mercado potencial de la tecnología AHT es enorme, de ahí la necesidad de estudiar y realizar un análisis técnico-económico de AHT en diferentes procesos industriales. Tareas y Objetivos:
El objetivo principal es identificar el potencial de la tecnología desde el punto de vista técnico-económico en diferentes procesos industriales. Para ello se desarrollarán las siguientes tareas principales:
• Análisis de mercado del calor residual de baja temperatura.
• Transformador de calor: Estado del arte de la tecnología, Aplicaciones y Fabricantes. Tecnologías competidoras.
• Estudio de impacto de la tecnología en diferentes procesos industriales: evaluación impacto ambiental y evaluacion tanto económica como medioambiental.

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
Para el trabajo realizado el alumno tendrá acceso a datos experimentales (4 configuraciones diferentes) para la caracterización de funcionamiento de los transformadores de calor.

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
ANÁLISISANÁLISIS TÉCNICOECONÓMICODELALMACENAMIENTOTÉCNICOECONÓMICODELALMACENAMIENTOTÉRMICOESTACIONALENINSTALACIONESDEDISTRICTTÉRMICOESTACIONALENINSTALACIONESDEDISTRICT
HEATINGHEATING
DENOMINACIÓN DEL PROYECTO
Análisis técnico económico del almacenamiento térmico estacional en instalaciones de district heating CENTRO PROMOTOR DEL PROYECTO Y TUTOR
TECNALIA. Área de Eficiencia Energética DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS
Departamento: MÁQUINAS Y MOTORES TÉRMICOS Tutor/a: PERFIL DEL/A CANDIDATO/A Idiomas
• Inglés Otros conocimientos
• Transferencia de calor • Fluidos térmicos • Dominio Excel
DESCRIPCIÓN DEL PROYECTO Introducción:
El objetivo del proyecto consiste en desarrollar un análisis técnico económico del almacenamiento térmico estacional en instalaciones de District Heating que utilizan como fuentes auxiliares sistemas de energía solar y bombas de calor. El análisis se basará en datos reales que han sido obtenidos tras la campaña de monitorización de una planta operativa en Varsovia, durante los últimos 2 años. A partir de los resultados obtenidos, se investigarán métodos de optimización y los distintos escenarios en los cuales el almacenamiento térmico estacional presente potencial de desarrollo desde el punto de vista técnico-económico.
Objetivos:
• Estudio y comprensión técnica de los sistemas de district heating, almacenamiento estacional y colectores solares térmicos.
• Análisis de los datos de monitorización del circuito térmico y de los costes de operación y mantenimiento de la planta de Varsovia.
• Análisis comparativo tecno-económico entre la planta real y los posibles escenarios que presentan un potencial para la aplicación de plantas similares.
Tareas:
• Estudio básico de bibliografía sobre los sistemas existentes y aplicaciones de: calefacción de distrito, sistemas de almacenamiento estacional y otros sistemas térmicos (solar y bombas de calor).
• Selección de datos y confección de una herramienta (Excel) para calcular la eficiencia de los sistemas que componen la planta (parque solar, almacenamiento térmico, calefacción de distrito), su rendimiento global.

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
• Análisis de los costes de inversión, mantenimiento y operación de la planta de Varsovia para obtener los costes específicos.
• Selección de 3 posibles escenarios donde se pueda aplicar un sistema similar y análisis comparativo de los costes específicos entre la planta de Varsovia y los escenarios seleccionados.
PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
ANÁLISISTERMOANÁLISISTERMO--ECONÓMICODEEQUIPOSLOWECONÓMICODEEQUIPOSLOW--GWPORCGWPORC(ORGANICRANKINECYCLE)ACTIVADO(ORGANICRANKINECYCLE)ACTIVADOss MEDIANTECALORESMEDIANTECALORESRESIDUALESPROCEDENTESDEMOTORESDIESELMARINOSRESIDUALESPROCEDENTESDEMOTORESDIESELMARINOS
DENOMINACIÓN DEL PROYECTO Análisis, termo-económico de equipos low-GWP ORC (Organic Rankine Cycle) activados mediante calores residuales procedentes de motores diésel marinos. CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA. Área de Eficiencia Energética. DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Máquinas y Motores Térmicos Tutor/a: Zigor Uriondo PERFIL DEL/A CANDIDATO/A Idiomas Inglés Otros conocimientos
• Transferencia de calor • Simulación de ciclos termodinámicos • Dominio EES (Engineering Equation Solver) • Dominio Excel
DESCRIPCIÓN DEL PROYECTO Introducción: El objetivo es realizar el estudio del potencial de la tecnología para diferentes rangos de temperatura de activación, potencias y configuraciones de equipo desde un punto de vista técnico-económico. Por tanto, se llevará a cabo un análisis termo-económico de equipos low-GWP ORC (Fluido de trabajo: R1233zd(e)) para generación eléctrica a partir de las fuentes de calor disponibles en un motor diésel marino, estudio a llevar a cabo para diferentes rangos de potencia de motor en base a los buques representativos seleccionados. Para ello se desarrollará un modelo de simulación del ciclo ORC (mediante el programa EES) que permita analizar diferentes configuraciones del mismo, así como variaciones en la temperatura de activación y rangos de potencia.
Objetivos: • Desarrollo de un modelo de simulación para dimensionamiento de componentes del ciclo ORC,
• Desarrollo de análisis termo-económico, en base a las simulaciones llevadas a cabo teniendo en cuenta fuentes de calor disponibles en un motor diésel marino, rangos de potencia y configuraciones del ciclo.
• Definición de rango de potencia objetivo, que permita obtención de ROI-s (return of the investment) inferiores a 3 años.
Tareas: • Desarrollo de un modelo de simulación para dimensionamiento de componentes del ciclo ORC,
basado en componentes físicos del ciclo incluyendo correlaciones de transferencia de calor en los intercambiadores, así como eficiencias del resto de componentes principales del ciclo

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
basadas tanto en datos experimentales de caracterización experimental a nivel de laboratorio del equipo low-GWP ORC, así como en valores suministrados por los proveedores de dichos componentes.
• Desarrollo de análisis termo-económico, contacto con proveedores, obtención de precios de componentes seleccionados en base a las simulaciones llevadas a cabo teniendo en cuenta fuentes de calor disponibles en un motor diésel marino, rangos de potencia y configuraciones del ciclo.
• Definición de rango de potencia objetivo, en base a temperatura de activación y configuración del ciclo que permita obtención de ROI-s (return of the investment) inferiores a 3 años teniendo en cuenta precio de combustible y patrones de funcionamiento de buques.
.

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
ESTUDIODEVIABILIDADTECNOESTUDIODEVIABILIDADTECNO--ECONÓMICODEUNCAPTADORECONÓMICODEUNCAPTADORDECALORPORRADIACIÓNENELINFRARROJOPARAINDUSTRIADECALORPORRADIACIÓNENELINFRARROJOPARAINDUSTRIA
DENOMINACIÓN DEL PROYECTO Estudio de viabilidad tecno-económico de un captador de calor por radiación en el infrarrojo para la industria siderúrgica. CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA. Área de Eficiencia energética DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: MÁQUINAS Y MOTORES TÉRMICOS Tutor/a: Zigor Uriondo PERFIL DEL/A CANDIDATO/A Idiomas Inglés Otros conocimientos
• Transferencia de calor por radiación/convección/conducción. • Conocimientos de óptica • Dominio EES (Engineering Equation Solver) • A valorar conocimientos en Dymola/Modelica
DESCRIPCIÓN DEL PROYECTO Introducción: El objetivo del proyecto consiste en que el alumno realice un estudio de viabilidad técnico económico de un captador de calor por radiación infrarroja para la industria siderometalúrgica basándose en resultados obtenidos mediante simulaciones. El comportamiento del captador se simulará bien en EES o en Dymola y alimentará dicho estudio técnico económico.
Objetivos:
• Desarrollo de un modelo de simulación para dimensionamiento del captador de calor por radiación en el infrarrojo,
• Análisis técnico de la viabilidad del captador en base a restricciones técnicas de la industria, así como materiales de fabricación, recubrimientos, Factores de visión y efectos del fouling.
• Análisis económico de la viabilidad del captador en base a restricciones técnicas de la industria, así como materiales de fabricación, recubrimientos, Factores de visión y efectos del fouling.
Tareas:
• Desarrollo de un modelo de simulación para dimensionamiento del captador de calor por radiación en el infrarrojo, el modelo será desarrollado en EES (Engineering equation solver), no obstante, será contrastado contra modelos desarrollados mediante Dymola (Modelica).
• Análisis técnico de la viabilidad del captador. Tomando por base la simulación desarrollada y alimentada por valores de emisividad del substrato+recubrimiento, factores de visión en base a

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
la geometría derivada del dimensionamiento y las distancias entre captador y pieza debidas a las limitaciones propias de la industria, analizar la eficiencia del captador y desarrollar un análisis de sensibilidad de la influencia del fouling factor en dicha eficiencia. Análisis de Viabilidad técnica de las posibles soluciones técnicas de limpieza del equipo.
• Análisis económico de la viabilidad del captador en base a materiales seleccionados para su fabricación: substratos, recubrimientos, material de la cubierta de la misma, materiales del posible sistema de limpieza; así como configuración/geometría del captador/cubierta, layout de circuitos de sal fundida, configuración del sistema de limpieza para evitar los efectos del fouling.
.
PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1
CARACTERIZACIÓNENERGÉTICADEDELSECTOREDIFICIOSACARACTERIZACIÓNENERGÉTICADEDELSECTOREDIFICIOSAESCALACIUDADESCALACIUDAD
DENOMINACIÓN DEL PROYECTO
Caracterización energética de del sector edificios a escala ciudad CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA. Área de Eficiencia Energética. DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Máquinas y Motores Térmicos Tutor/a: Koldo Martín Escudero PERFIL DEL/A CANDIDATO/A Idiomas Inglés Otros conocimientos
• Tecnologías energéticas • Energía en edificios • Recursos energéticos • Capacidad analítica, dominio del Excel
DESCRIPCIÓN DEL PROYECTO Introducción:
El objetivo del proyecto se basa en la evaluación tanto de las demandas como el consumo energético del sector edificios de ciudades. Para el caso de estudio se dispondrá de información real de la ciudad evaluada a partir del cityGML y del modelo 3D de la ciudad. Se definirán diferentes tipologías de edificios en función de su uso y edad y se obtendrán las curvas a escala ciudad.
Objetivos: • Tratamiento de datos relativos a las características principales de los edificios a escala ciudad
para la definición de la demanda energética de edificios (datos obtenidos del cityGML y modelo 3D de la ciudad)
• Evaluación de las características principales de la ciudad (puntos de generación energética, zonas rehabilitadas, grados de protección, potencial de instalación de sistemas de generación de energía renovable, etc.)
• Desarrollo de un modelo de caracterización de las demandas y consumo energéticos a escala ciudad.
Tareas: • Análisis y tratamiento de datos disponibles para la caracterización de las demandas de la ciudad
• Análisis de las potenciales barreras de la ciudad que puedan limitar el despliegue de medidas de eficiencia energética y energías renovables
• Desarrollo de un modelo simplificado de evaluación de demandas y consumos a escala ciudad que pueda se adaptado a otras ciudades

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2
• Evaluación de escenarios alternativos de mejora para la ciudad
Medios necesarios:
• Ordenador portátil.
• Design Builder
• Los software necesarios estarán a cargo de Tecnalia.
PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 1/2
Análisisdelpotencialysolucionesdeenvolventessolareshíbridas(fotovoltaico-térmicas)paraedificiosenentornosurbanos
DENOMINACIÓN DEL PROYECTO Análisis del potencial y soluciones de envolventes solares híbridas (fotovoltaico-térmicas) para edificios en entornos urbanos.
CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA. Área de Energía Solar.
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Matemática Aplicada Tutora: Raquel Fuente
PERFIL DEL/A CANDIDATO/A Idiomas Inglés Otros conocimientos Programación en Matlab (principal), y otros entornos: Python, TrnSys, etc.
DESCRIPCIÓN DEL PROYECTO Introducción: La gran mayoría del consumo energético de la sociedad europea se localiza en los edificios. Sean residenciales, industriales o del sector terciario (hospitales, centros deportivos, hoteles, residencias, edificios públicos, etc.) estas necesidades energéticas son por lo general en forma de electricidad y calor, tanto para satisfacer necesidades de agua caliente sanitaria (ACS) como calefacción. En un próximo escenario en donde los edificios europeos deberán presentar una demanda energética prácticamente nula, o nearly zero energy demand (NZED), la mayor parte de la energía consumida en los mismos deberá ser generada de forma local por medio de recursos renovables. Desafortunadamente, a día de hoy no existe tecnología renovable alguna que permita proporcionar una solución integral y simultánea a esta necesidad de un modo técnico-económicamente competitivo. Sin embargo, la energía solar es una fuente de energía disponible en todos y cada uno de los edificios a lo largo y ancho del planeta, por lo tanto, ¿por qué no transformarla localmente para cubrir ambas necesidades de energía? La tecnología actual permite aprovechar dicha energía y convertirla en forma de electricidad o calor a través de paneles fotovoltaicos o térmicos respectivamente. La tecnología solar fotovoltaica ha visto fuertemente mejorada su competitividad durante los últimos años debido a importantes reducciones de coste, por lo que es cada vez más empleada como fuente de generación de electricidad y su instalación en el entorno urbano está comenzando a ser más común. La tecnología solar térmica ha resistido el fuerte crecimiento del sector fotovoltaico, ofreciendo en la actualidad colectores de mejoradas prestaciones y mayor durabilidad, que permiten abastecer de calor aplicaciones de ACS, calefacción y refrigeración. No obstante, existe un límite real en la eficiencia de conversión de la actual tecnología solar fotovoltaica, lo que supondrá un fuerte hándicap para las tecnologías solares puramente eléctricas que dominan el mercado. Las eficiencias de conversión térmicas resultan más elevadas, pero la mayor relevancia y potencial de la electricidad impide su prevalencia. Así pues, si los sistemas fotovoltaicos actuales no aprovechan gran parte de la energía solar

PropuestadeProyectoAulaTECNALIA2017-2018
15/09/2017 2/2
(~85%) pero existe un interés creciente en la utilización de la electricidad como vector energético (power-to-heat, vehículo eléctrico, etc) que reduce el interés en sistemas solares térmicos, soluciones híbridas que aprovechen la energía solar simultáneamente en forma de electricidad y calor, extrayendo mayor valor de ella, tendrán un gran desarrollo. Es ahí donde se enmarca la presente propuesta de colaboración, en el aprovechamiento dual de la energía solar para generar no sólo energía eléctrica (a través de dispositivos fotovoltaicos) sino térmica (a través de recuperadores de calor residual) que sean a su vez elementos constructivos del propio edificio en el que se integren. La aportación de estas energías renovables de origen solar para satisfacer las necesidades energéticas de los edificios está comenzando a resultar una realidad técnico-económicamente competitiva en el sur de Europa y se postula como una de las grandes oportunidades de futuro. Objetivo: Por todo ello, se presenta la siguiente propuesta de proyecto dentro del aula Tecnalia. El objetivo principal del mismo es el análisis del potencial de envolventes solares híbridas (fotovoltaicas-térmicas) para edificios en entornos urbanos, así como la identificación de las soluciones que pudieran dar lugar a desarrollos posteriores. Tareas: Para ello se proponen las siguientes actividades:
• Revisión del estado del arte de soluciones solares híbridas. • Identificación de tipos de edificios en entornos urbanos y de sus necesidades energéticas. • Análisis del potencial solar de las envolventes de dichos edificios. • Determinación de la generación solar hibrida y grado de cumplimiento respecto a las necesidades
energéticas en diferentes niveles: edificio, barrio y sistemas más complejos. • Obtención de conclusiones y características de dichas envolventes solares híbridas. • Identificación de las soluciones más prometedoras que pudieran dar lugar a desarrollos posteriores.

PropuestadeProyectoAulaTECNALIA2017-2018
20/07/2017 1/2
Mapeoen3Dmediantevisiónestereoscópicayoptimizacióndeguiadocentralizadoydistribuidobasadoenalgoritmosbioinspirados
DENOMINACIÓN DEL PROYECTO Mapeo tridimensional mediante visión estereoscópica de robots y optimización de guiado (centralizado y distribuido) basado en algoritmos bioinspirados.
CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA Tutor: Javier Del Ser / Javier Sánchez Cubillo
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Ingeniería de Comunicaciones Tutor: Miren Nekane Bilbao PERFIL DEL/A CANDIDATO/A Titulación Ingeniería de Telecomunicación. Ingeniería Industrial, Ingeniería en Automática y Electrónica Industrial. Idiomas Inglés (nivel alto en lectura y escritura) Otros conocimientos Programación en Python (principal) Simuladores de robótica (V-Rep) Algoritmos de optimización para guiado (e.g. ACO)
DESCRIPCIÓN DEL PROYECTO Introducción: Un problema muy investigado hoy en día es el mapeo de lugares con robots móviles. Hasta la actualidad los telémetros láser o sensores sonar son las técnicas más utilizadas para la detección de objetos y la distancia existente hasta ellos. Sin embargo, la visión estereoscópica ha sido poco utilizada como técnica para este fin. Ésta se fundamenta en la obtención de imágenes tridimensionales a partir de imágenes bidimensionales, siendo mucho más atractivo para diversas aplicaciones. El ser humano no tiene problemas a la hora de intuir una estructura tridimensional a partir de una imagen en 2D proporcionada por la vista. Es de gran interés que los robots cuenten con este recurso ya que éstos tienen mayor accesibilidad a distintos terrenos como cuevas, zonas de riesgo para la salud humana, o incluso en Marte. Sin embargo, un robot carece de intuición y experiencia por lo que se plantea un problema complicado de resolver. Primero se debe abordar el problema de guiado para que el sistema conozca en todo momento su posición y entorno. Esto es indispensable para aportar al robot una mayor autonomía y pueda optimizar después su trayectoria para la construcción del mapa. El terreno se tratará como una red con diversos nodos desde los cuales se obtendrán las imágenes. Es un modelo que debe funcionar en el tiempo e ir actualizando sus resultados a medida que se obtiene el mapa.

PropuestadeProyectoAulaTECNALIA2017-2018
20/07/2017 2/2
Además, la exploración se puede realizar con varios robots que trabajen en conjunto. Para ello cada uno de ellos debe conocer en el tiempo tanto la información obtenida como los nodos recorridos por los otros. Mediante el uso de algoritmos genéticos como ACO (Ant Colony Optimization) es posible la optimización del guiado. Asimismo, el modelo puede ser centralizado o distribuido, siendo de interés la comparación entre los dos ya que puede resultar más útil uno u otro dependiendo de la aplicación deseada. El modelo centralizado es más sencillo de implementar ya que todos los robots envían sus datos a un ordenador central que dirige a los mismos. Por el contrario, el distribuido es más seguro ya que al no depender de un solo ordenador, si fallase uno de ellos los demás podrían seguir trabajando. Objetivo: Por todo ello, se presenta la siguiente propuesta de proyecto dentro del aula Tecnalia. El objetivo principal del mismo es, mediante la visión estereoscópica, mapear terrenos en 3D optimizando la trayectoria realizada por los robots, así como el modelado y análisis del guiado centralizado y distribuido. Tareas: Para ello se proponen las siguientes actividades:
● Revisión del estado del arte del guiado y visión estereoscópica en robots. ● Modelado del problema de guiado. ● Diseño/Elección del algoritmo de guiado tanto centralizado como distribuido. ● Diseño/Elección del algoritmo de visión estereoscópica. ● Desarrollo de un modelo de simulación que permita parametrizar y verificar la valía de la/las
solución/es propuestas, con consideraciones de batería, resolución de imagen, etc. ● Simulación de diferentes casos de estudio. ● Posibilidad de implementación con Arduino y Raspberry Pi.

Propuesta de Proyecto Aula TECNALIA 2017-2018
20/07/2017 1/2
Modelos Bioinspirados Híbridos de Aprendizaje Máquina y Optimización
DENOMINACIÓN DEL PROYECTO Modelos Bioinspirados Híbridos de Aprendizaje Máquina y Optimización CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA Tutor: Javier Del Ser
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Ingeniería de Comunicaciones Tutora: Cristina Perfecto
PERFIL DEL/A CANDIDATO/A Titulación Ingeniería de Telecomunicación. Ingeniería Industrial, Ingeniería en Automática y Electrónica Industrial. Idiomas Inglés (nivel alto en lectura y escritura) Otros conocimientos Programación en Python (principal), C, Java Optimización bioinspirada (algoritmos genéticos, PSO, SA, ACO) Opcional: modelos de computación neuronal (ELM, ANN, Deep Learning) Latex (nivel de usuario) DESCRIPCIÓN DEL PROYECTO Introducción: El proyecto se enmarca dentro del denominado Big Data, y pretende avanzar sobre el conocimiento actual alrededor del paradigma de la computación neuronal profunda (Deep Learning), con aproximaciones capaces de recordar el conocimiento aprendido sobre los datos a lo largo del tiempo. Estas nuevas formas de computación neuronal, denominadas redes LSTM (Long Short Time Memory), son capaces de retener y explotar los patrones aprendidos a lo largo del tiempo, siendo sumamente eficientes a la hora de procesar datos caracterizados por un elevado grado de correlación temporal. Este es el caso de muchos escenarios prácticos de aplicación emergentes en campos como la Energía o la Industria, donde gran parte de los datos generados toman la forma de series temporales (e.g. los datos de funcionamiento sensorizados en una máquina, los consumos energéticos de un hogar, o la información capturada para la caracterización de un edificio en lo que respecta a su consumo energético). Merced a la utilización de las redes LSTM es posible, por ejemplo, predecir cuándo una máquina fallará con mayor precisión y certitud que otros modelos predictivos. Además, las aplicaciones de este tipo de modelos trascienden más allá de los dominios anteriormente citados, pudiendo ser empleadas, por ejemplo, para el reconocimiento y detección de objetos en imágenes y vídeo, la generación de imágenes/sonido a partir de texto, el análisis de huellas conectómicas del cerebro humano, la caracterización de portafolios de clientes para fidelización o la creación de inteligencia en videojuegos, entre muchos otros. En particular, el alumno colaborará con otras personas del equipo en la construcción automática de modelos de computación neuronal profunda, utilizando algoritmos de optimización bio-inspirados para el diseño óptimo de las capas híbridas que los integran. También contribuirá a la línea de investigación centrada en el diseño de modelos de computación neuronal profunda con aprendizaje incremental y mecanismos de
Propuesta de Proyecto Aula TECNALIA 2017-2018
20/07/2017 2/2
diversidad para problemas con requisitos exigentes en tiempos de cómputo (e.g. detección de muestras anómalas sobre flujos de datos). El conocimiento generado se aplicará sobre datos de diferentes dominios, entre los que destacan la Industria y Energía. Objetivo: El objetivo del proyecto es ahondar en el conocimiento sobre técnicas de analítica de datos y optimización para extraer y explotar nuevo conocimiento basado en datos. En esencia el proyecto se centrará en el desarrollo de nuevas técnicas de detección de patrones basadas en la computación neuronal profunda para series temporales de datos, así como en su aplicación en diferentes y muy diversas casuísticas en dominios como la Industria, la Energía o la Movilidad. Tareas:
1. Estado del arte sobre algoritmos bioinspirados para el diseño optimizado de modelos de aprendizaje máquina, con énfasis en aproximaciones basadas en programación genética e hiperheurística.
2. Definición de una aproximación basada en algoritmos bioinspirados para el diseño automático de redes neuronales profundas, implementación e interpretación de resultados sobre conjuntos de datos de prueba.
3. Preparación y envío de una contribución a una conferencia internacional. 4. Extensión del modelo para aprendizaje incremental (online, para streams de datos). 5. Preparación y envío de artículo a revista Q1.
Nota: todas estas tareas contarán con ayuda activa por parte de los supervisores.

Propuesta de Proyecto Aula TECNALIA 2017-2018
20/07/2017 1/1
DENOMINACIÓN DEL PROYECTO “Security of personal data”
CENTRO PROMOTOR DEL PROYECTO Y TUTOR TECNALIA Tutor: Xabier Larrucea
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS Departamento: Departamento de Ingeniería de Comunicaciones. I2T Group - Investigación e Ingeniería Telemática Tutor: Mariví Higuero PERFIL DEL/A CANDIDATO/A Titulación Grado en Ingeniería Informática de Gestión y Sistemas de Información Grado en Ingeniería en Tecnología de Telecomunicación Grado en Ingeniería Electrónica Industrial y Automática Idiomas Inglés Otros conocimientos Lenguajes de programación JAVA, C, C++ Entornos de desarrollo Eclipse, Netbeans Seguridad informática
DESCRIPCIÓN DEL PROYECTO Introducción: La ciberseguridad es uno de los aspectos más importantes de esta última década y todos los estados miembros de la Unión Europea han tomado conciencia de su importancia y aprobaron la General Data Protection Regulation (GDPR) el 14 de de abril de 2016 cuya aplicación se de obligado cumplimiento a partir de 25 Mayo 2018. El artículo 32 de la GDPR “security of processing” se identifican una serie de medidas para asegurar un nivel apropiado de seguridad de los datos personales. De entre estas medidas destaca la pseudonymisation y la encriptación de datos personales http://ec.europa.eu/justice/data-protection/reform/files/regulation_oj_en.pdf Objetivo: El objetivo del proyecto es desarrollar un mecanismo de encriptación y pseudonymisation de datos perso Tareas:
• Análisis del estado del arte en herramientas de encriptación • Análisis del estado del arte en herramientas de pseudonymisation • Desarrollo de un ejemplo de una página Web que maneje y almacene datos personales. • Desarrollo de herramienta encriptación y pseudonymisation • Desarrollo de un visualizador del estado de los datos almacenados
Propuesta de Proyecto Aula TECNALIA 2017-2018
13/07/2015 1
AAllggoorriittmmooss bbaassaaddooss eenn DDeeeepp--LLeeaarrnniinngg ppaarraa ccaarraacctteerriizzaacciióónn ddee iimmáággeenneess..
DENOMINACIÓN DEL PROYECTO
Aplicación de técnicas de Computer Vision y Deep learning en aplicaciones agro/bio
CENTRO PROMOTOR DEL PROYECTO Y TUTOR
TECNALIA
Artzai Picon
Aranzazu Bereciartua
Aitor Alvarez
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS
Departamento: Departamento de Ingeniería de Sistemas
Tutor/a: Pedro Iriondo
PERFIL DEL/A CANDIDATO/A
Titulación: Ingeniería con conocimientos de programación
Idiomas
Inglés
Otros conocimientos Nociones básicas sobre procesamiento de imagen
Nociones básicas de Machine Learning
Conocimientos en lenguajes de programación (Python, C/C++, C#, Matlab)
GIT
DESCRIPCIÓN DEL PROYECTO
Introducción:
El análisis de imágenes de alta complejidad es un reto que se viene analizando desde los comienzos de la visión
artificial. Hasta ahora se habían obtenido resultados aceptables en entornos muy controlados mediante la
utilización del proceso clásico de visión artificial: preprocesamiento, extracción de características, clasificación. Sin
embargo, esta extracción de características se hacía de una forma manual y artesanal que tenía gran dependencia
de la aplicación. Esto daba lugar a dos problemas principales:
- La dependencia de un algoritmo con un problema específico.
- La no optimización de las características extraídas.
En los últimos años se han popularizado técnicas basadas en redes neuronales computacionales integradas dentro
de arquitecturas profundas. Estas arquitecturas permiten una extracción de características en las primeras capas y
una adaptación a las mismas por parte del clasificador final de forma simultánea mimetizando en cierta forma al
sistema visual humano. Esto permite resolver problemas de clasificación, detección y segmentación de imágenes
hasta ahora no resolubles y con una capacidad de generalización mucho mayor a la que hasta ahora era posible.
Objetivos:

Propuesta de Proyecto Aula TECNALIA 2017-2018
13/07/2015 2
- Aprendizaje por parte del alumno de técnicas avanzadas de visión artificial (machine learning, deep
learning…).
- Aprendizaje por parte del alumno en técnicas de desarrollo de software cooperativas.
- Normalización y estandarización de imágenes de los problemas seleccionados.
- Desarrollo de un sistema de detección y gradación de lesiones procedentes de los problemas
seleccionados
- Validación estadística de las capacidades del sistema desarrollado.
Tareas:
- Formación guiada, a través de seminarios online públicos de las técnicas necesarias para el desarrollo:
o Machine Learning
o Repositorios Online
o Deep Learning
- Análisis del problema a resolver (clasificación automática de imágenes en problema concreto, clasificación
de imágenes, análisis de imágenes biológicas)
- Desarrollo de sistema automático de diagnóstico de imagen:
o Pretratamiento de la imagen
o Desarrollo de sistema clásico de identificación y detección
o Desarrollo de sistema basado en CNN para la identificación y detección.
El desarrollo de las tareas se realizará en las instalaciones de Tecnalia ED700 debido a los requerimientos de
equipo de desarrollo y a la interacción en las tareas con personal de Tecnalia.
Medios necesarios:
- PC con capacidad computacional suficiente con tarjeta NVIDIA GTX960 o superior (existente en
ED700 TECNALIA).
- Entorno de programación Python.
Duración del proyecto:
9 meses (Octubre-Mayo)

Propuesta de Proyecto Aula TECNALIA 2017-2018
01/07/2016 1
UUttiillllaajjeess fflleexxiibblleess ppaarraa mmeeccaanniizzaaddoo:: CCaarraacctteerriizzaacciióónn ddee eelleemmeennttooss ddee aallttaa
ddeeffoorrmmaabbiilliiddaadd ccoommoo ssooppoorrttee eenn uuttiillllaajjeess fflleexxiibblleess aaeerroonnááuuttiiccooss..
DENOMINACIÓN DEL PROYECTO
Utillajes flexibles para mecanizado: Caracterización de elementos de alta deformabilidad como soporte en utillajes
flexibles aeronáuticos.
CENTRO PROMOTOR DEL PROYECTO Y TUTOR
TECNALIA. Asun Rivero/Antonio Rubio.
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS
Departamento: Ingeniería Mecánica.
Tutor/a: Aitzol Lamikiz o Eneko Ukar.
PERFIL DEL/A CANDIDATO/A
Idiomas
Inglés
Otros conocimientos Ingeniería mecánica, conocimientos de Tecnología de Fabricación y conocimientos de programación en
Matlab/Python.
DESCRIPCIÓN DEL PROYECTO
Introducción:
El objeto a estudiar en este proyecto es la caracterización de diferentes elementos de alta deformabilidad
utilizados en un desarrollo innovador de utillaje flexible utilizado en la fabricación de pieles aeronáuticas de
aluminio mediante mecanizado convencional. Se pretende que este sistema sea capaz de fabricar este tipo de
piezas esbeltas sin tener que recurrir a tecnologías de bajo rendimiento, como el fresado químico, o incurrir en
grandes inversiones, como las soluciones de fresado mecánico mediante máquina de doble cabezal.
Objetivos:
El objetivo principal de este trabajo, es la caracterización de diversos elementos de alta deformabilidad mediante
la monitorización de su comportamiento durante diversos ensayos de mecanizado. Las tareas más relevantes son:
• Revisión de estado del arte sobre la aplicación de mecanizado de pieles aeronáuticas.
• Búsqueda de información sobre caracterización de elementos flexibles.
• Diseño de experimentos para monitorizar comportamiento de los elementos flexibles.
• Análisis de señales para caracterizar el comportamiento de los elementos flexibles bajo los esfuerzos
derivados del proceso de mecanizado.
Medios necesarios:
Disponibilidad de centro de mecanizado, elementos de monitorización (Kistler, acelerómetros, LVDT/Láser),
equipamiento de vacío, elemento flexible y herramientas de corte.
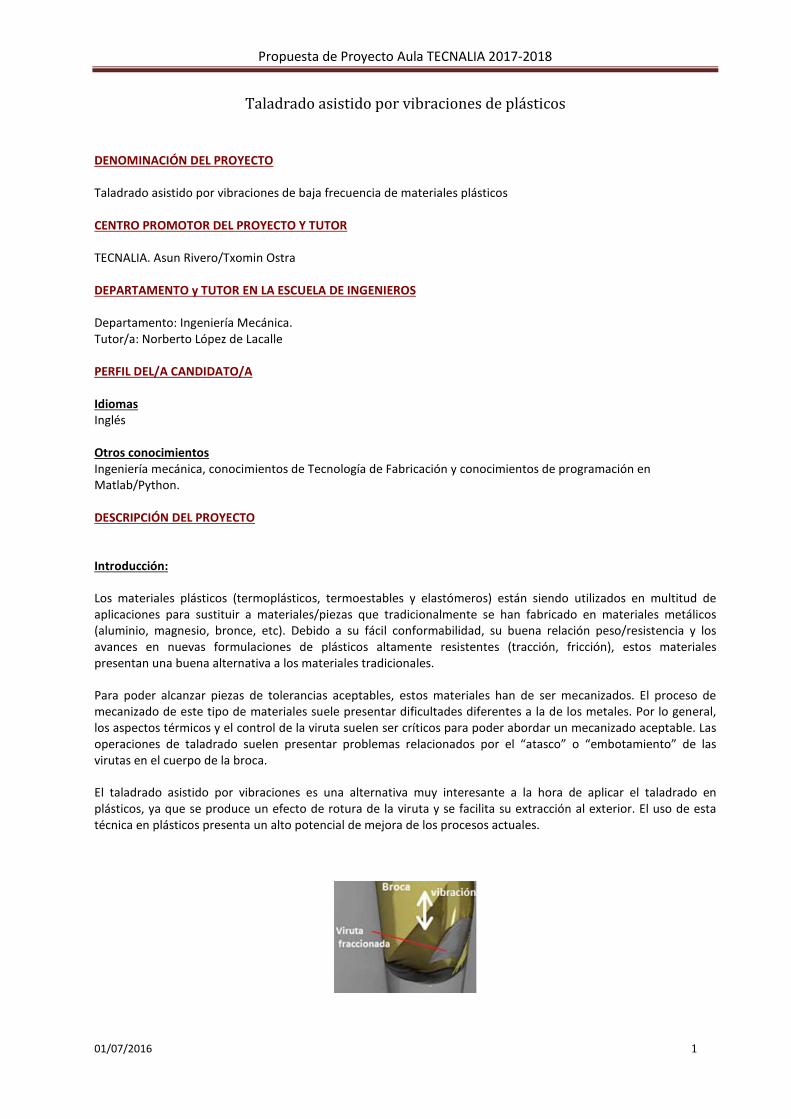
Propuesta de Proyecto Aula TECNALIA 2017-2018
01/07/2016 1
Taladrado asistido por vibraciones de plásticos
DENOMINACIÓN DEL PROYECTO
Taladrado asistido por vibraciones de baja frecuencia de materiales plásticos
CENTRO PROMOTOR DEL PROYECTO Y TUTOR
TECNALIA. Asun Rivero/Txomin Ostra
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS
Departamento: Ingeniería Mecánica.
Tutor/a: Norberto López de Lacalle
PERFIL DEL/A CANDIDATO/A
Idiomas
Inglés
Otros conocimientos Ingeniería mecánica, conocimientos de Tecnología de Fabricación y conocimientos de programación en
Matlab/Python.
DESCRIPCIÓN DEL PROYECTO
Introducción:
Los materiales plásticos (termoplásticos, termoestables y elastómeros) están siendo utilizados en multitud de
aplicaciones para sustituir a materiales/piezas que tradicionalmente se han fabricado en materiales metálicos
(aluminio, magnesio, bronce, etc). Debido a su fácil conformabilidad, su buena relación peso/resistencia y los
avances en nuevas formulaciones de plásticos altamente resistentes (tracción, fricción), estos materiales
presentan una buena alternativa a los materiales tradicionales.
Para poder alcanzar piezas de tolerancias aceptables, estos materiales han de ser mecanizados. El proceso de
mecanizado de este tipo de materiales suele presentar dificultades diferentes a la de los metales. Por lo general,
los aspectos térmicos y el control de la viruta suelen ser críticos para poder abordar un mecanizado aceptable. Las
operaciones de taladrado suelen presentar problemas relacionados por el “atasco” o “embotamiento” de las
virutas en el cuerpo de la broca.
El taladrado asistido por vibraciones es una alternativa muy interesante a la hora de aplicar el taladrado en
plásticos, ya que se produce un efecto de rotura de la viruta y se facilita su extracción al exterior. El uso de esta
técnica en plásticos presenta un alto potencial de mejora de los procesos actuales.
Propuesta de Proyecto Aula TECNALIA 2017-2018
01/07/2016 2
Taladrado asistido por vibraciones
Objetivos:
El objetivo principal de este trabajo es cuantificar las mejoras del taladrado asistido por vibraciones en
comparación con el taladrado convencional para materiales plásticos. Para alcanzar este objetivo han de realizarse
las siguientes tareas:
• Revisar de estado del arte sobre el taladrado asistido por vibraciones
• Identificar casos de estudio de taladrado de plásticos de uso común en la industria plástica
• Diseñar experimentos para taladrado asistido por vibraciones.
• Redactar informe con resultados y conclusiones de los experimentos
Medios necesarios:
Disponibilidad de centro de mecanizado, elementos de monitorización (Kistler, acelerómetros, LVDT/Láser), porta
herramientas con efecto vibrador.

Propuesta de Proyecto Aula TECNALIA 2017-2018
10/2017 1
TTééccnniiccaass aavvaannzzaaddaass ddee pprroocceessaammiieennttoo ddee iimmaaggeenn:: ddeeeepp lleeaarrnniinngg eenn aapplliiccaacciioonneess
iinndduussttrriiaalleess DENOMINACIÓN DEL PROYECTO
Técnicas avanzadas de procesamiento de imagen: deep learning en aplicaciones industriales
CENTRO PROMOTOR DEL PROYECTO Y TUTOR
TECNALIA
Alberto Isasi
Estibaliz Garrote
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS
Departamento: Departamento de Ingeniería de Sistemas
Tutor/a: Pedro Iriondo
PERFIL DEL/A CANDIDATO/A
Titulación: Ingeniería con conocimientos de programación
Idiomas
Inglés
Otros conocimientos Conocimientos en lenguajes de programación (preferiblemente Python o Matlab)
Nota: no son necesarios conocimientos previos en deep learning / redes convolucionales. La formación
en las mismas está incluida en este trabajo.
DESCRIPCIÓN DEL PROYECTO
Introducción:
Es posible que te hayas sorprendido a ti mismo últimamente utilizando el traductor de Google con cierta
asiduidad, cediendo el manejo de los frenos a tu coche en plena autopista o dictando tus respuestas en
ese grupo de WhatsApp y comprobando que, ahora sí, tu móvil te entiende cuando le hablas.
La tecnología detrás de todos estos desarrollos se denomina Deep Learning que está llevando la
inteligencia artificial a una nueva generación por los sorprendentes resultados y nuevas aplicaciones
que está abriendo. Uno de los campos todavía por explorar son las aplicaciones industriales.
El trabajo a realizar aborda el desarrollo de un sistema de procesamiento de imágenes para el control de
calidad de piezas cromadas. Hasta el momento todas las piezas tanto de cromados decorativos (por
ejemplo sector automoción) como de cromado funcional (por ejemplo piezas aeronáuticas) son
inspeccionadas una a una.
Objetivos:

Propuesta de Proyecto Aula TECNALIA 2017-2018
10/2017 2
- Aprendizaje por parte del alumno de técnicas avanzadas de visión artificial (machine learning, deep
learning…).
- Realización de pruebas con banco de ensayos de captura de imágenes
- Desarrollo de un sistema de detección y clasificación de defectos en piezas fabricadas
Tareas:
- Formación guiada, a través de seminarios online públicos de las técnicas necesarias para el desarrollo:
o Machine Learning
o Deep Learning
- El trabajo a desarrollar incluye una primera parte de análisis y escaneo de piezas a controlar.
- En una segunda parte se utilizarán las imágenes recogidas para desarrollar un sistema de
procesamiento basado en técnicas deep learning.
El desarrollo de las tareas se realizará en las instalaciones de Tecnalia ED700 (Derio) debido a los requerimientos
de equipo de desarrollo y a la interacción en las tareas con personal de Tecnalia.
Medios necesarios:
- PC con capacidad computacional suficiente con tarjeta NVIDIA GTX960 o superior (existente en
ED700 TECNALIA).
- Entorno de programación Python.
Duración del proyecto:
8 meses (Noviembre-Mayo)

Propuesta de Proyecto Aula TECNALIA 2017-2018
01/09/2017 1
FFaabbrriiccaacciióónn AAddiittiivvaa:: DDeessaarrrroolllloo ddee eessttrraatteeggiiaass ddee ffaabbrriiccaacciióónn bbaassaaddooss eenn
ssiimmuullaacciioonneess tteerrmmoommeeccáánniiccaass..
DENOMINACIÓN DEL PROYECTO
Fabricación Aditiva: Desarrollo estrategias de fabricación basados en simulaciones termomecánicas.
CENTRO PROMOTOR DEL PROYECTO Y TUTOR
TECNALIA. Amaia Alberdi/Alfredo Suárez
DEPARTAMENTO y TUTOR EN LA ESCUELA DE INGENIEROS
Departamento: Ingeniería Mecánica.
Tutor/a: Aitzol Lamikiz
PERFIL DEL/A CANDIDATO/A
Idiomas
Inglés
Otros conocimientos Ingeniería mecánica, conocimientos de software elementos finitos. Conocimientos en Matlab/Python
DESCRIPCIÓN DEL PROYECTO
Introducción:
Fabricación aditiva es una revolución industrial. Los beneficios en términos de ahorro de material, personalización
de piezas y nuevo diseños abren un amplio abanico de posibilidades para la industria.
Existen diferentes tecnologías emergiendo actualmente, pero el nivel de madurez todavía no es suficientemente
alto para conseguir una penetración mayor en la industria.
Algunos problemas no solventados están relacionados con la optimización del proceso en términos de propiedades
de materiales, distorsiones producidas en pieza final, secuencia de fabricación.
Objetivos:
El objetivo principal de este trabajo, es el desarrollo de modelos numéricos simplificados que permitan reducir los
ensayos experimentales y den soporte a la etapa de generación de trayectorias.
La propuesta de proyecto,
Tareas:
• Revisión tecnologías DMD (Laser Cladding / WAAM)
• Revision estado del arte modelos termomecánicos predición de distorsiones.
• Modelizado fuente calor en diferentes tecnologías y validación experimental
• Modelo numérico integrado en plataforma de simulación predición distorsiones mecánicas. (Abaqus,
Siemens Nx)

Propuesta de Proyecto Aula TECNALIA 2017-2018
01/09/2017 2
• Desarrollo demostradores
Medios necesarios:
Tecnología LMD y WAAM para fabricación aditiva. Licencia de software de cálculo Matlab. Fungibles (materiales
para ensayos).


















