Control de un motor DC con logic Difusa

of 3
-
Upload
felipe-ochoa -
Category
Documents
-
view
216 -
download
0
Transcript of Control de un motor DC con logic Difusa
-
7/23/2019 Control de un motor DC con logic Difusa
1/3
TEORA DEL CONTROL III 1
Diseo de un controlador PID para motor DCGarca Andrea, Ochoa Felipe, Ortiz Cristian.
[email protected]@[email protected]
Universidad Politcnica Salesiana
AbstractMediante el presente documento se dar a conocerlos pasos a seguir para la identificacin de la planta correspon-diente a un motor DC y el diseo del controlador PID basadoen ecuaciones de diferencias e implementado mediante el uso desoftware como Matlab y LabVIEW.
I. INTRODUCCIN
El funcionamiento del controlador PID en general se basaen actuar en forma proporcional, integral y derivativa sobre laseal de error, definida como la diferencia entre la seal dereferencia y la seal de salida del proceso, con la finalidadde efectuar la seal de control que manipula la salida delproceso en forma deseada. El motor DC es uno de los sistemasdinmicos ms utilizados en la prueba de algoritmos de controldebido a que su funcin de transferencia puede ser reducidaa un sistema lineal de orden uno.[1],[2]
II. IDENTIFICACIN DE LA PLANTA
Para determinar la funcin de transferencia del motor DC, separte de los datos experimentales de la relacin salidaentrada,por lo que se conect el motor al osciloscopio del cual,mediante observacin, obtendremos valores reales que nospermitirn determinar la funcin de transferencia de nuestrosistema de primer orden.
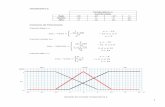
Fig. 1. Captura de osciloscopio, Anlisis transitorio del comportamiento aun escaln.
Fig. 2. Planta correspondiente a un motor DC
Obtenidos los valores necesarios, se procede al clculo delas variables respectivas necesarias para el modelamiento.
Calculamos el tao mediante el tiempo de estabilizacindel sistema que para este caso sera de 364ms
= tss
5 (1)
=364ms
5 (2)
= 72.8ms (3) Ahora encontraremos la constante A
K= 7
10 (4)
El 10 significa nuestro valor de referencia.
K= 0.7 (5)
Por tanto tendremos una funcin de transferencia
-
7/23/2019 Control de un motor DC con logic Difusa
2/3
TEORA DEL CONTROL III 2
G(s) = 0.7
0.0728s+ 1 (6)
III. DISEO DEL CONTROLADOR
Para el diseo del controlador hacemos uso de la her-ramienta Sisotool de Matlab, el cul automticamente (Au-tomated tunning) calcula un compensador al momento dellamarlo a travs del respectivo comando.
Fig. 3. Compensador obtenido por medio de herramienta Sisotool
Una vez establecido el compensador automtico, nos lo-
calizamos en la ubicacin de las races y modificamos suposicin hasta obtener una respuesta ms ajustada a nuestrosrequerimientos.
Fig. 4. Ubicacin geomtrica de las races.
Fig. 5. Respuesta simulada del comportamiento requerido de un controladorde PID sobre un motor DC.
Obtenemos el compensador deseado.
Utilizando matlab-sisotool se podr obtener la funcinde transferencia y tambin determinar el valor de lasconstantes necesarias para realizar el control del sistema.
G(s) = 31.487 (1 + 0.021s)
s
(7)
Resolviendo obtendremos:
G(s) =31.87
s +
0.661227s
s (8)
G(s) =31.87
s + 0.66122 (9)
Por lo tanto los valores de las constantes sern:
Ti = 31.87
Kc= 0.66122
IV. IMPLEMENTACINUna vez obtenidas las constantes procedemos a su imple-
mentacin en LabVIEW, se ha decidido utilizar un controladorpara modificar el valor de las mismas desde la interfaz delprograma diseado ya que por medio de la experimentacinse puede optimizar el funcionamiento del controlador.
Establecida la expresin del controlador por ecuacionesde diferencias (10), procedemos a la programacin de lamisma en donde se utilizan diferentes bloques que hacen elfuncionamiento de operadores matemticos conjuntamente conshift registers para la memoria de los datos de k.
-
7/23/2019 Control de un motor DC con logic Difusa
3/3
TEORA DEL CONTROL III 3
u(k) = u(k1)+kp
e(k) e(k 1) +
Td
T [e(k) 2e(k 1) +e(k 2)] +
T
T ie(k)
(10)
Fig. 6. Diagrama de bloques correspondiente a la implementacin delcontrolador en ecuaciones de diferencias.
Fig. 7. Diagrama frontal correspondiente a la Interfaz del programa, sigue lareferencia y responde a perturbaciones.
V. CONCLUSIONES
Pese a que entre los objetivos se estableca implementar uncontrolador PID, debido a la necesidad de respuesta rpida seopt por un PD, sin embargo se consider la opcin de manejarcontroladores y no indicadores en el caso de las constantespara la variacin de las mismas en el caso que se logrenmejores resultados mediante el mtodo de experimentacin.
Para el clculo de tao (periodo de muestreo) es necesariotener en cuenta la frecuencia de muestreo, sin embargo sepuede implementar el criterio prctico donde optamos deter-minar el valor de tao basndonos en el nmero de muestras(10 - 30).
En el momento de las pruebas de funcionamiento se proponesometer perturbaciones que ocupen un espacio de tiempomayor a 1s ya que frente a esta se puede analizar correctamenteel comportamiento del controlador.
REFERENCES
[1] Rairn-Antolines, J. D., Guerrero-Cifuentes, C. E., & Mateus-Pineda,J. A. (2010). Diseo de controladores de tipo proporcional integralderivativo (PID) y difuso para la posicin de un motor de corrientecontinua (DC). Ingenieria y Universidad, 14(1), 137.
[2] Islas-Gmez, O., Ramos-Velasco, L. E., & Garca-Lamont, J. (2010).Identificacin y control wavenet de un motor de CD. In Congreso Anualde la Asociacin de Mxico de Control Automtico (AMCA), PuertoVallarta, Jalisco, Mexico.