Conf Curvas Bezier
61
UNIVERSIDAD FRANCISCO DE PAULA SANTANDER Departamento Diseño Mecánico Materiales y Procesos Grupo de Investigación Diseño Mecánico y Mantenimiento GIDIMA DISEÑO DE LEVAS Ley de Desplazamiento con curvas de Bézier CARLOS HUMBERTO ACEVEDO PEÑALOZA, IM., MS.c., Ph.D. Profesor Titular
-
Upload
jose-luis-ojeda-carvajal -
Category
Documents
-
view
41 -
download
3
description
curvas bezier
Transcript of Conf Curvas Bezier

UNIVERSIDAD FRANCISCO DE PAULA SANTANDERDepartamento Diseño Mecánico Materiales y Procesos
Grupo de Investigación Diseño Mecánico y Mantenimiento
GIDIMA
DISEÑO DE LEVAS
Ley de Desplazamiento con curvas de Bézier
CARLOS HUMBERTO ACEVEDO PEÑALOZA, IM., MS.c., Ph.D.
Profesor Titular

– Introducción
CONTENIDO DE LA PRESENTACIÓN
– Objetivos de la investigación
– Estado actual en el diseño de mecanismo leva palpador
– Conclusiones
– Motivación de la investigación
– Leyes de desplazamiento

INTRODUCCIÓN
Línea de Investigación Teoría de Máquinas y
mecanismos
Síntesis de Mecanismos
Leva Palpador
APORTE AL ESTUDIO DE LA MATERIA MECANISMOS DE LAS INGENIERIAS MECANICA Y ELECTROMECANICA DE LA UNIVERSIDAD FRANCISCO DE PAULA SANTANDER - OCAÑA

MOTIVACIÓN DE LA INVESTIGACIÓN
- Aportar al estudiante nuevas técnicas de diseño y análisis de los mecanismos leva palpador, con el fin de mejorar el estudio de la ley de desplazamiento
OBJETIVOS DE LA INVESTIGACIÓN
– Definir la ley de desplazamiento por tramos rectos unidos por empalmes definidos con curvas de Bézier
– Estudiar la idoneidad del grado de continuidad en los empalmes
Objetivos

Mecanismo Leva palpador
Mecanismo Leva palpador
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA PALPADOR
Una leva es un elemento mecánico que sirve para impulsar a otro, por contacto puntual o lineal, llamado palpador o seguidor, para que este desarrolle una ley de movimiento especificada

Tipos de Mecanismos Leva Palpador
Disco o plano Cuña Cilíndrica
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA PALPADOR

Clasificación de los mecanismos leva palpador
– Según la geometría de la leva
Esféricas Cilíndricas Globoides
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA PALPADOR
3. Comprobación del perfil
obtenido
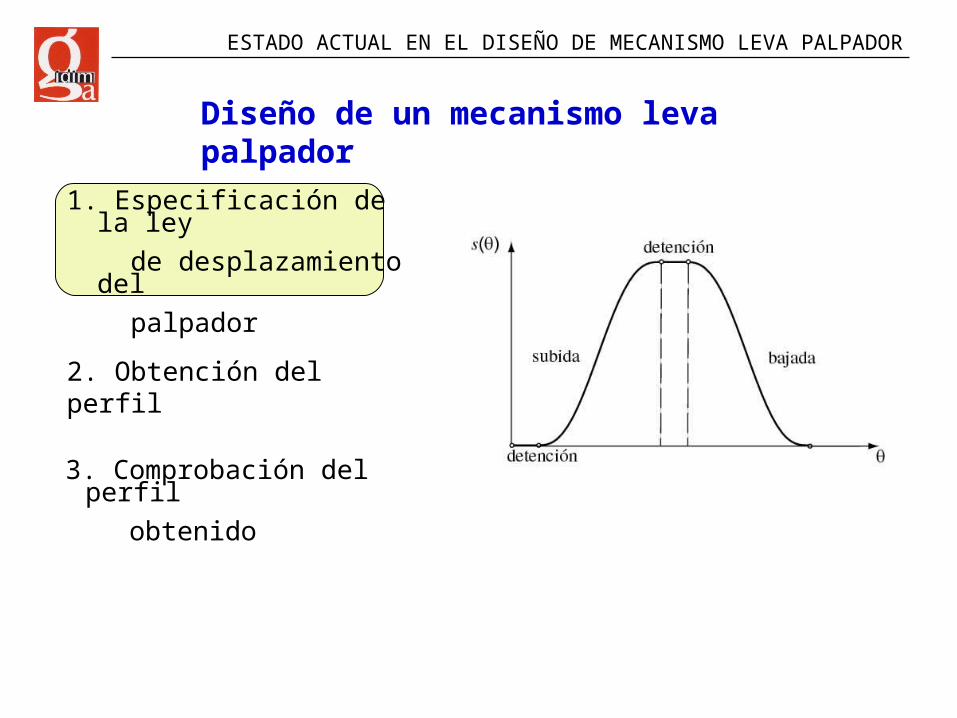
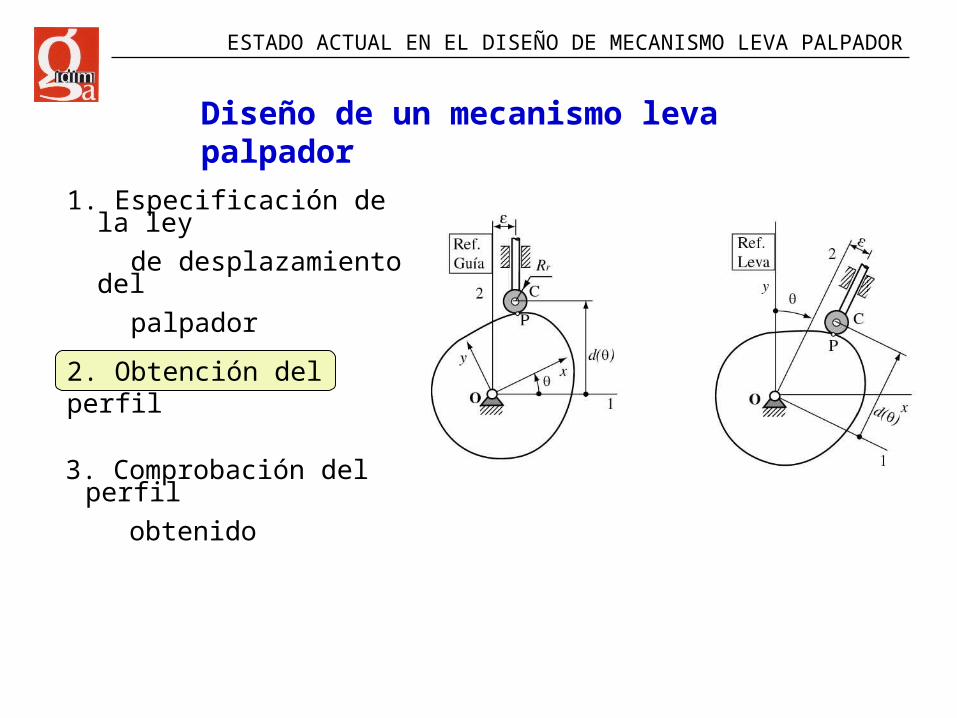
Diseño de un mecanismo leva palpador
2. Obtención del perfil
1. Especificación de la ley
de desplazamiento del
palpador
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA PALPADOR
3. Comprobación del perfil
obtenido
2. Obtención del perfil
1. Especificación de la ley
de desplazamiento del
palpador
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA PALPADOR
Diseño de un mecanismo leva palpador

3. Comprobación del perfil
obtenido
2. Obtención del perfil
1. Especificación de la ley
de desplazamiento del
palpador
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA PALPADOR
Diseño de un mecanismo leva palpador
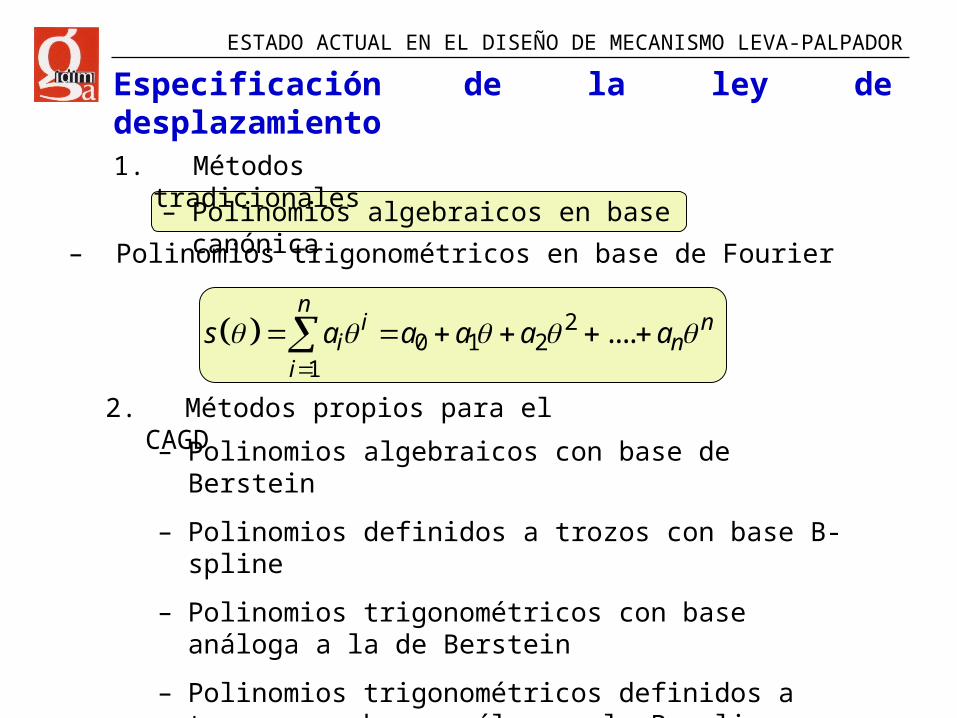
1. Métodos tradicionales
2. Métodos propios para el CAGD
– Polinomios algebraicos con base de Berstein
– Polinomios definidos a trozos con base B-spline
– Polinomios trigonométricos con base análoga a la de Berstein
– Polinomios trigonométricos definidos a trozos con base análoga a la B-spline
– Polinomios algebraicos en base canónica
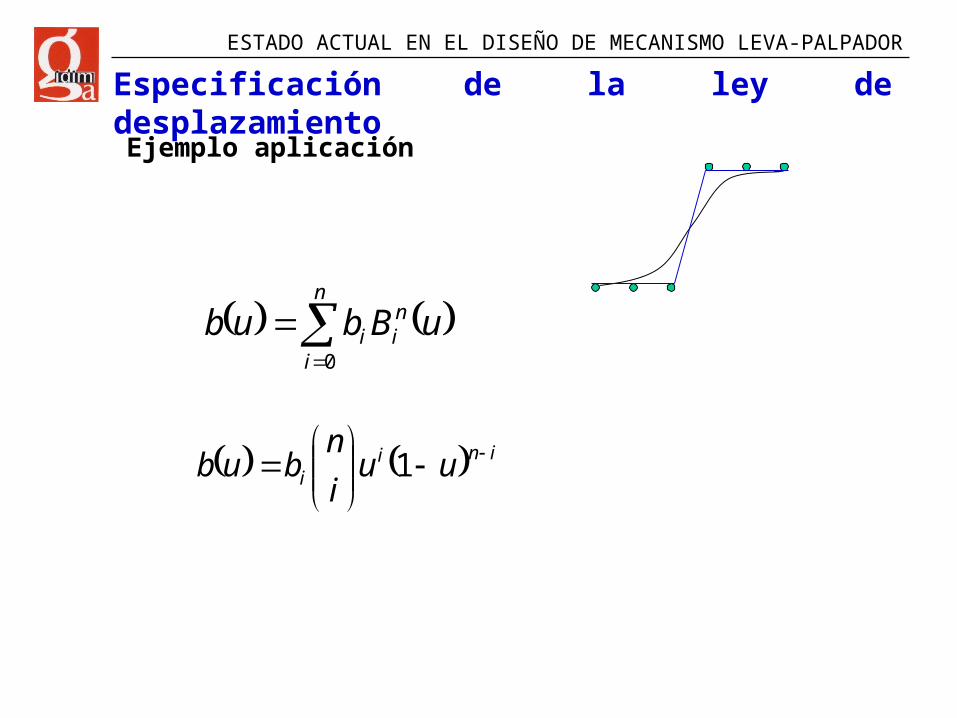
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Polinomios trigonométricos en base de Fourier
20 1 2
1
....n
i ni n
i
s a a a a a

1. Métodos tradicionales
2. Métodos propios para el CAGD
– Polinomios algebraicos con base de Berstein
– Polinomios definidos a trozos con base B-spline
– Polinomios trigonométricos con base análoga a la de Berstein
– Polinomios trigonométricos definidos a trozos con base análoga a la B-spline
– Polinomios algebraicos en base canónica
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Polinomios trigonométricos en base de Fourier
01
sin cosm
i ii
s c s i c i

1. Métodos tradicionales
2. Métodos propios para el Diseño Geométrico Asistido por Ordenador CAGD
– Polinomios algebraicos con base de Berstein
– Polinomios algebraicos en base canónica
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Polinomios trigonométricos en base de Fourier
– Polinomios definidos a trozos con base B-spline
– Polinomios trigonométricos con base análoga a la de Berstein
– Polinomios trigonométricos definidos a trozos con base análoga a la B-spline

Métodos propios para el CAGD
– Polinomios algebraicos con base de Berstein
Bézier no paramétrica
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
n
i
nii uBbub
0
10u
1 n in ii
nB u u u
i
Base Bernsteinbi puntos de control
(coeficientes)

Métodos propios para el CAGD
– Polinomios algebraicos con base de Berstein
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
1 n in ii
nB u u u
i
Constantes del Triángulo de Pascal
14641
1331
121
11
1
!!
!
ini
n
i
n

Métodos propios para el CAGD
– Polinomios algebraicos con base de Berstein
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
1 n in ii
nB u u u
i
Polinomios

Métodos propios para el CAGD
– Polinomios algebraicos con base de Berstein
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
n
i
nii uBbub
0
Puntos de control

Métodos propios para el CAGD
– Polinomios algebraicos con base de Berstein
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Puntos de control
LIBRE MANIPULACION

Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Puntos de control
LIBRE MANIPULACION
El primer y el último punto de control es tangente a la curva descrita
La unión de los puntos de control describen un polígono de control
La curva siempre tiende a la forma del polígono de control
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
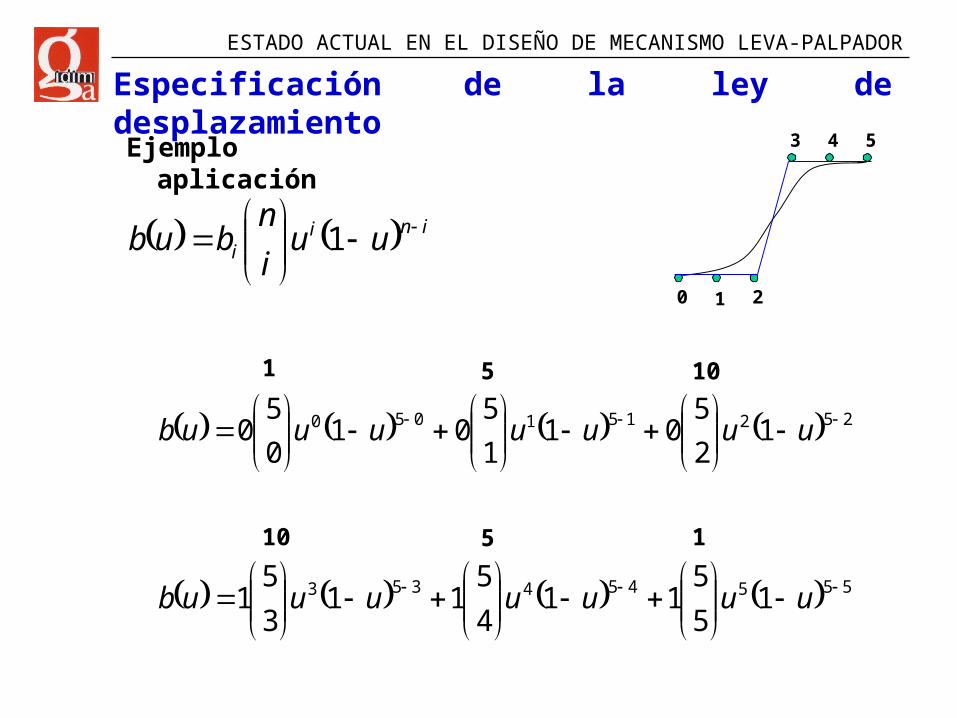
Ejemplo aplicación

Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación
Punto tangente

Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación

Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
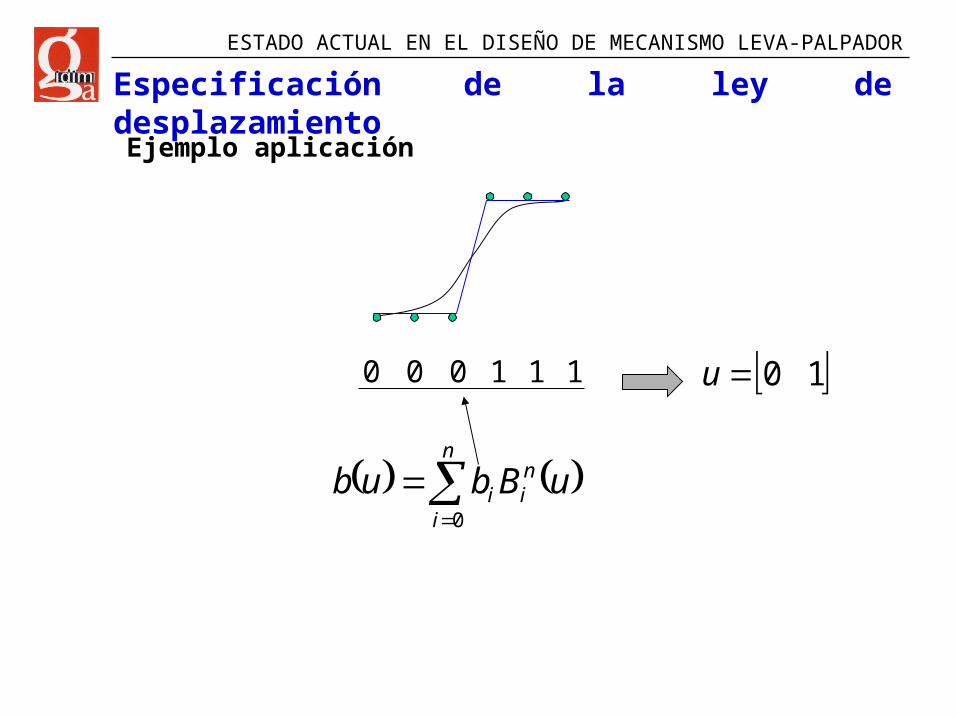
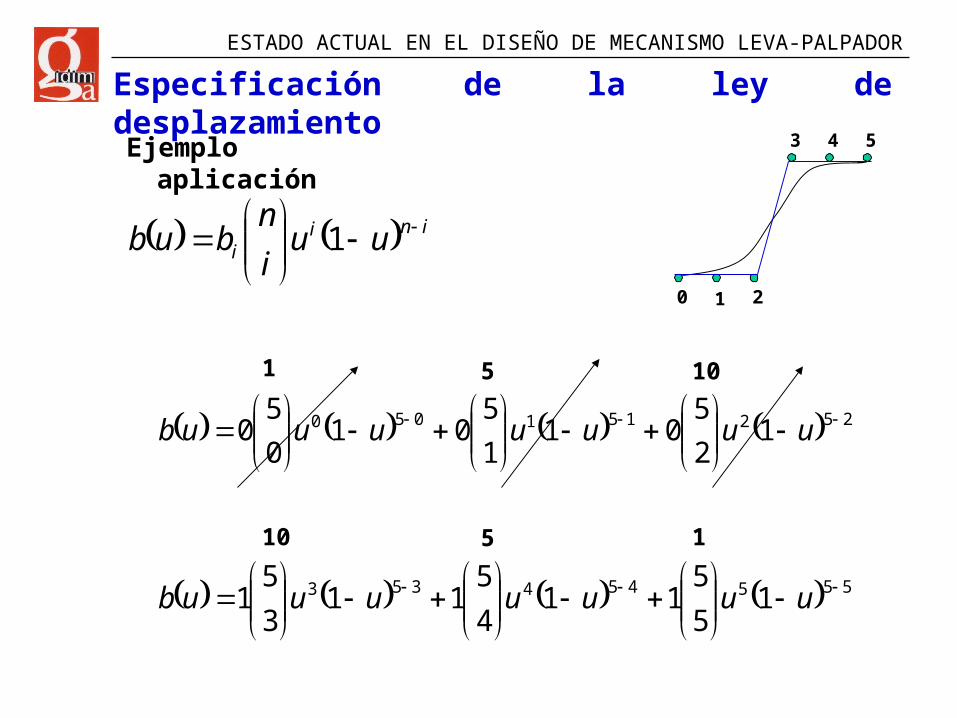
Ejemplo aplicación
n
i
nii uBbub
0
111000 10u
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación
n
i
nii uBbub
0
inii uui
nbub
1
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación
inii uui
nbub
1
10
3 4
2
5
555454353 15
511
4
511
3
51
uuuuuuub
252151050 12
501
1
501
0
50
uuuuuuub
1 5 10
10 5 1
Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación
inii uui
nbub
1
10
3 4
2
5
555454353 15
511
4
511
3
51
uuuuuuub
252151050 12
501
1
501
0
50
uuuuuuub
1 5 10
10 5 1

Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación
inii uui
nbub
1
10
3 4
2
5
543 61510 uuuub
3 4 5
' 2 3 4
'' 2 32
''' 23
10 15 6 ; 0 0 0 1 1 1
30 60 30
60 180 120
60 360 360
ib u L u u u b
Lb u u u u
Lb u u u u
Lb u u u

Especificación de la ley de desplazamiento
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ejemplo aplicación
DERIVADA DE LOS PUNTOS DE CONTROL
111000
00100
0110

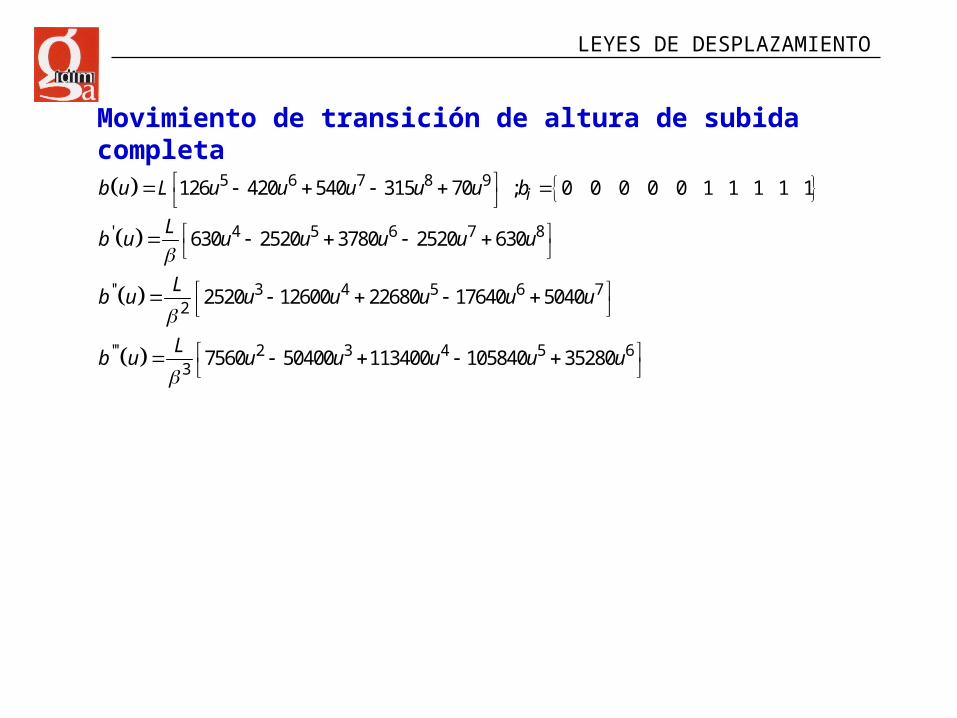
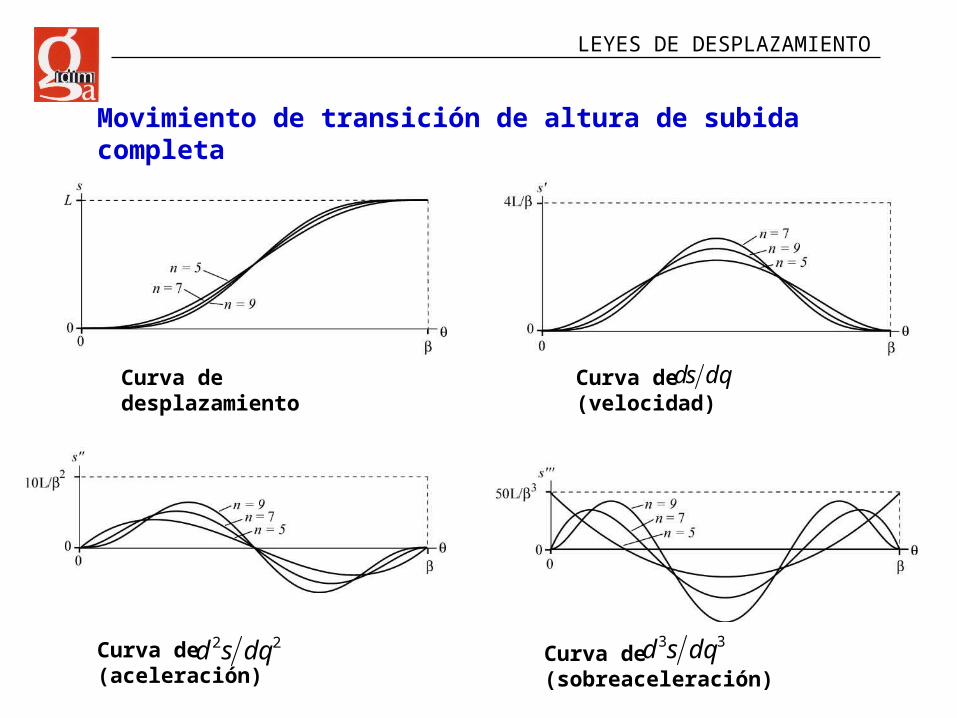
LEYES DE DESPLAZAMIENTO
Movimiento de transición de altura de subida completa
3 4 5
' 2 3 4
'' 2 32
''' 23
10 15 6 ; 0 0 0 1 1 1
30 60 30
60 180 120
60 360 360
ib u L u u u b
Lb u u u u
Lb u u u u
Lb u u u
4 5 6 7
' 3 4 5 6
'' 2 3 4 52
''' 2 3 43
35 84 70 20 ; 0 0 0 0 1 1 1 1
140 420 420 140
420 1680 2100 840
840 5040 8400 4200
ib u L u u u u b
Lb u u u u u
Lb u u u u u
Lb u u u u u
LEYES DE DESPLAZAMIENTO
Movimiento de transición de altura de subida completa
5 6 7 8 9
' 4 5 6 7 8
'' 3 4 5 6 72
''' 2 3 4 5 63
126 420 540 315 70 ; 0 0 0 0 0 1 1 1 1 1
630 2520 3780 2520 630
2520 12600 22680 17640 5040
7560 50400 113400 105840 35280
ib u L u u u u u b
Lb u u u u u u
Lb u u u u u u
Lb u u u u u u
LEYES DE DESPLAZAMIENTO
Movimiento de transición de altura de subida completa
Curva de desplazamiento Curva de (velocidad)ds dq
Curva de (aceleración)2 2d s dq Curva de (sobreaceleración)3 3d s dq
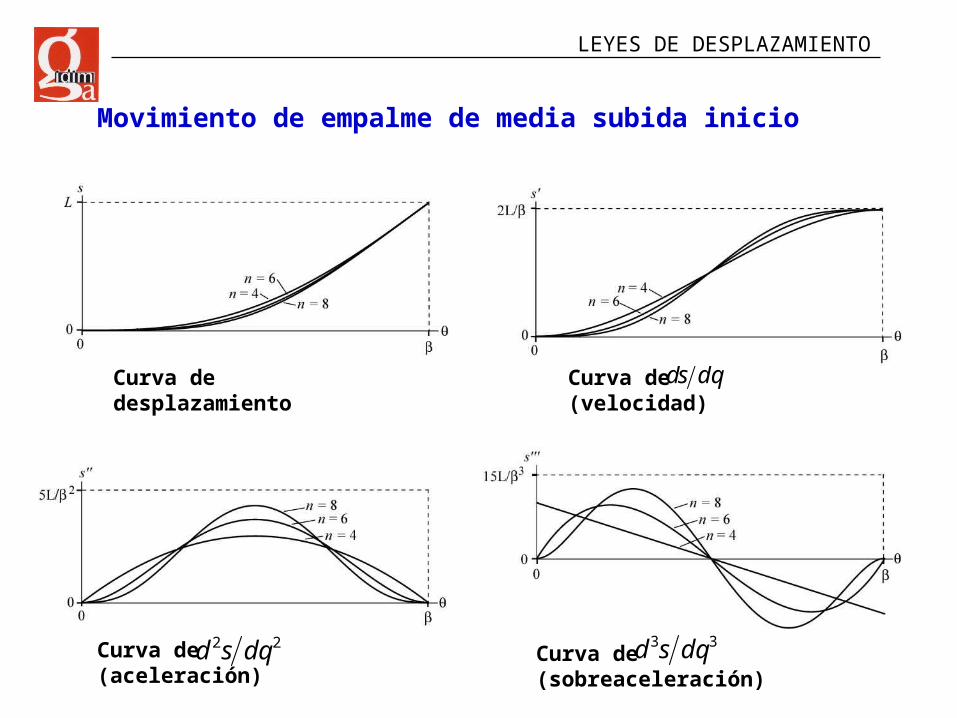
LEYES DE DESPLAZAMIENTO
Movimiento de empalme de media subida inicio
Curva de desplazamiento Curva de (velocidad)ds dq
Curva de (aceleración)2 2d s dq Curva de (sobreaceleración)3 3d s dq
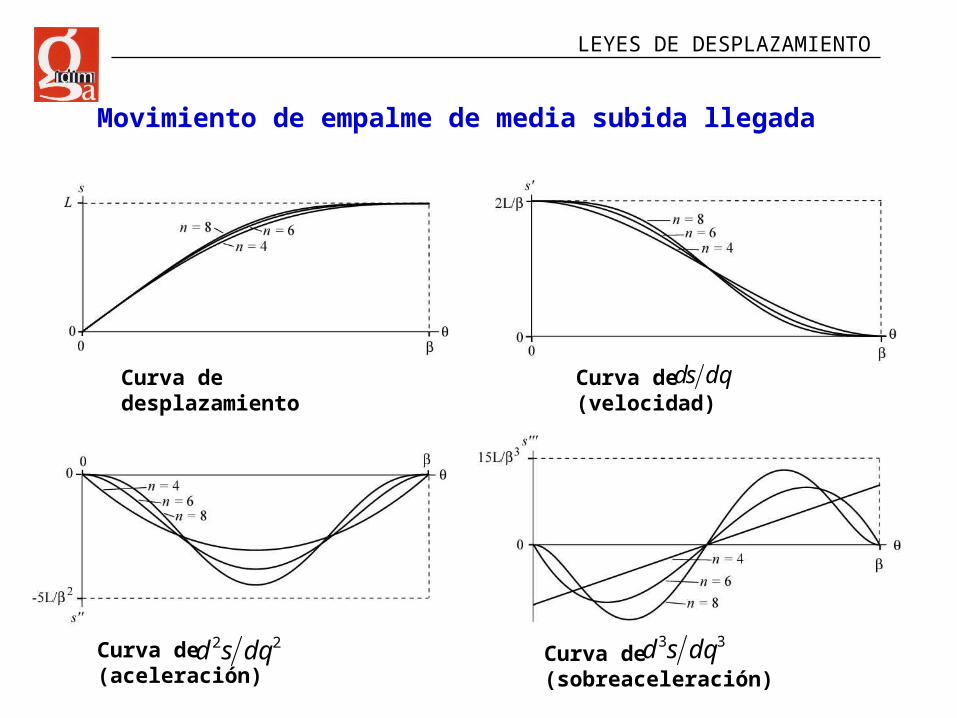
LEYES DE DESPLAZAMIENTO
Movimiento de empalme de media subida llegada
Curva de desplazamiento Curva de (velocidad)ds dq
Curva de (aceleración)2 2d s dq Curva de (sobreaceleración)3 3d s dq

– Doble contacto del palpador sobre la leva
Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Presencia de picos y degeneraciones en el perfil

– Doble contacto del palpador sobre la leva
Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
Ocurre cuando el radio del rodillo es mayor que el radio de curvatura de la leva en los tramos concavos
Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
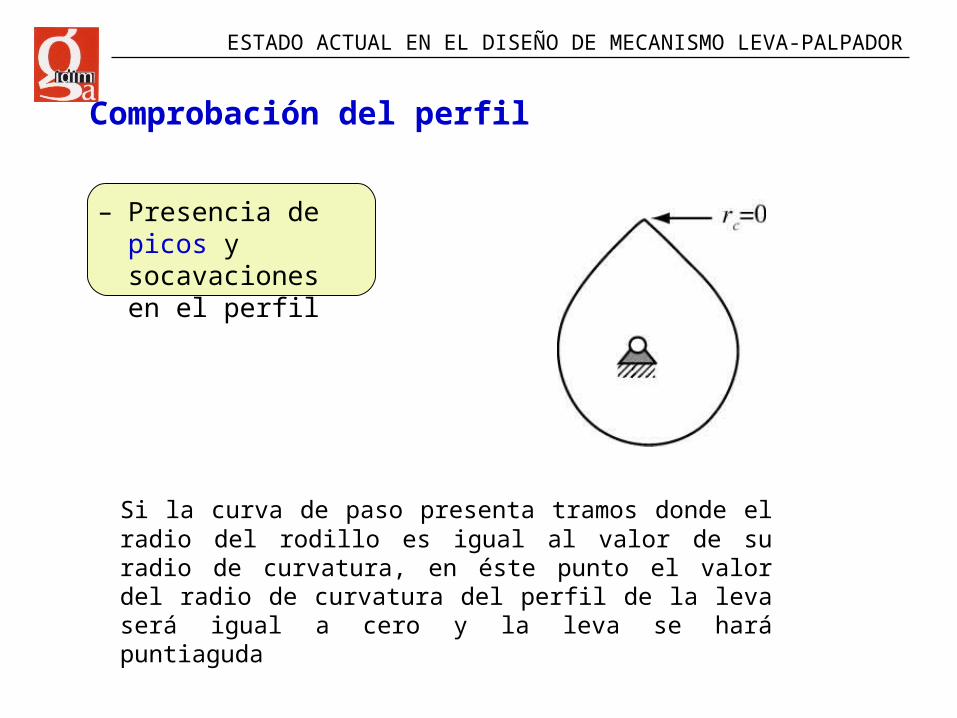
– Presencia de picos y socavaciones en el perfil
Si la curva de paso presenta tramos donde el radio del rodillo es igual al valor de su radio de curvatura, en éste punto el valor del radio de curvatura del perfil de la leva será igual a cero y la leva se hará puntiaguda

Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Presencia de picos y socavaciones en el perfil
Si existen tramos donde el radio del rodillo es mayor que el valor del radio de curvatura de la curva de paso, la leva presentará una socavación o rebaje
Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Ángulo de presión
– Radio de Curvatura

Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
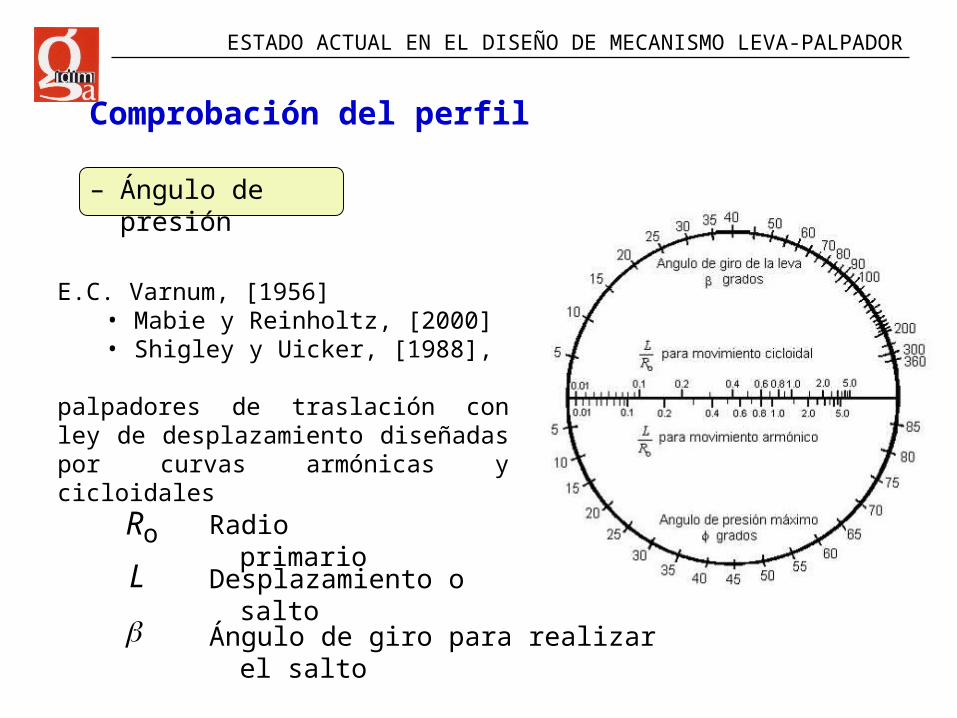
– Ángulo de presión
Para el correcto funcionamiento de los mecanismos leva palpador es conveniente que el ángulo de presión no supere el valor de 30º
2 2
arctanO
s
s R
Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Ángulo de presión
E.C. Varnum, [1956] • Mabie y Reinholtz, [2000] • Shigley y Uicker, [1988],
palpadores de traslación con ley de desplazamiento diseñadas por curvas armónicas y cicloidales
oR
L
Radio primario
Desplazamiento o salto
Ángulo de giro para realizar el salto

Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Ángulo de presión
E.C. Varnum, [1956] • Mabie y Reinholtz, [2000] • Shigley y Uicker, [1988],
palpadores de traslación con ley de desplazamiento diseñadas por curvas armónicas y cicloidales
oR
L
Radio primario
Desplazamiento o salto
Ángulo de giro para realizar el salto

Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
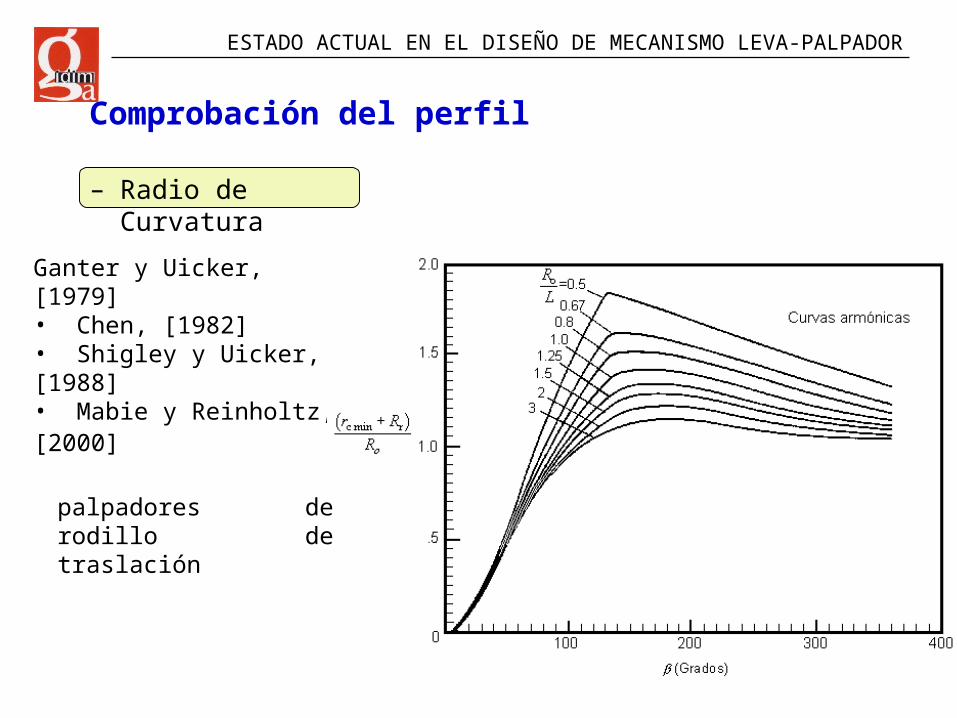
– Radio de Curvatura
El radio de curvatura mínimo en el diseño de levas se conoce como el mínimo valor que debe tener el radio de curvatura en la curva de paso para evitar que se presenten picos o socavaciones en el perfil de las levas
3/ 222
o
cp 2 22
o o 22
dsR s
dr
ds d sR s R s
d d
Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Radio de Curvatura
Ganter y Uicker, [1979]• Chen, [1982]• Shigley y Uicker, [1988]• Mabie y Reinholtz, [2000]
palpadores de rodillo de traslación
Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
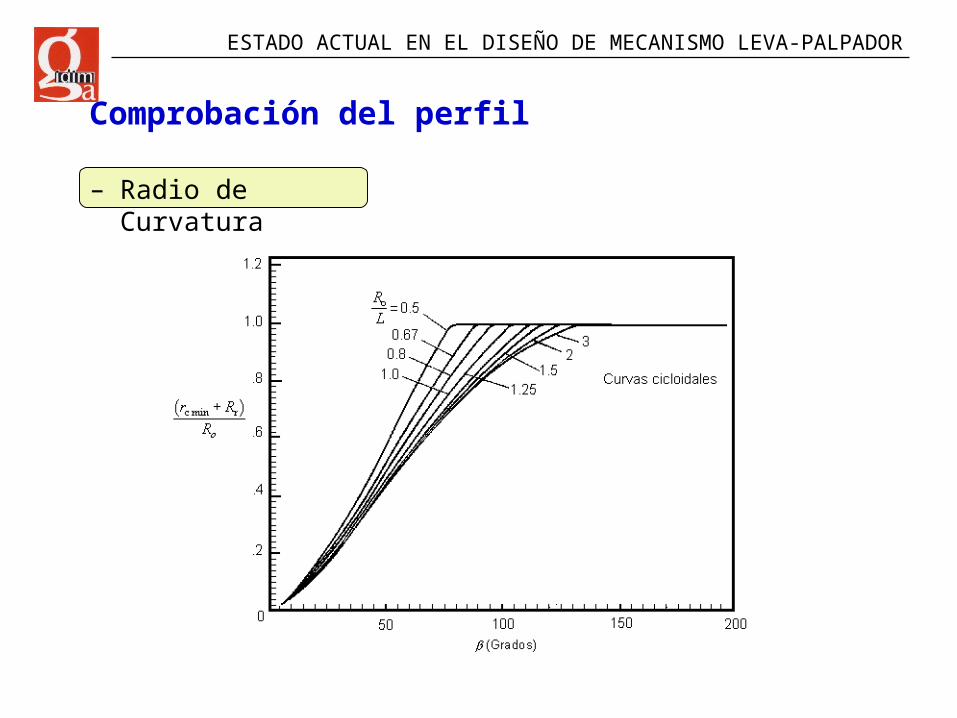
– Radio de Curvatura

Comprobación del perfil
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR
– Radio de Curvatura
ÁNGULO DE PRESIÓN Y RADIO DE CURVATURA
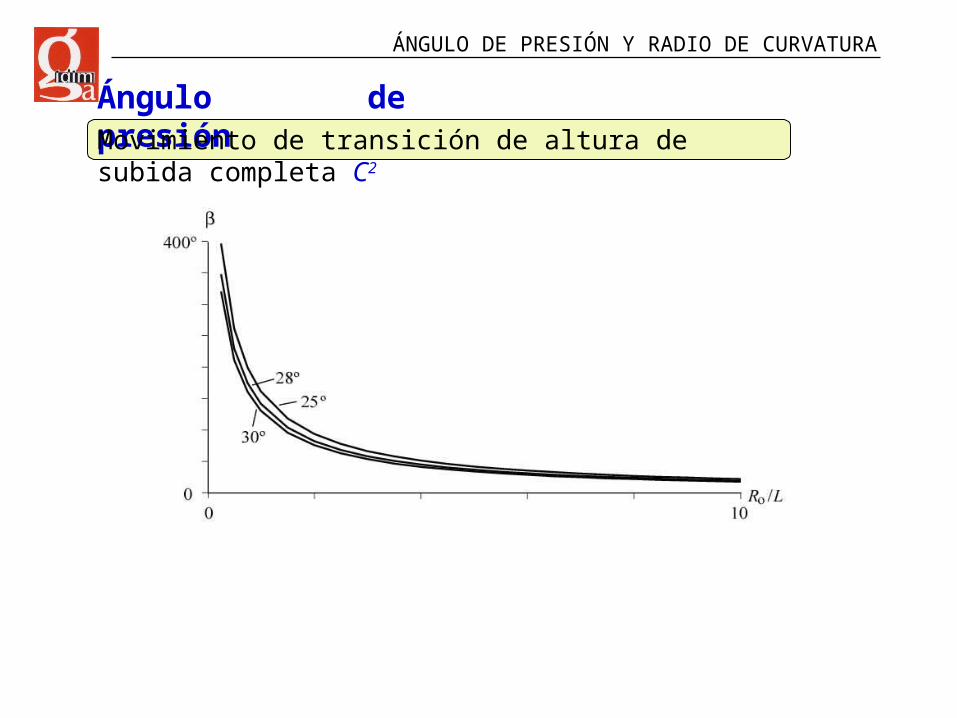
Ángulo de presiónMovimiento de transición de altura de subida completa C2

ÁNGULO DE PRESIÓN Y RADIO DE CURVATURA
Ángulo de presiónMovimiento de transición de altura de subida completa C2

ÁNGULO DE PRESIÓN Y RADIO DE CURVATURA
Ángulo de presiónMovimiento de empalme de media subida llegada, n=4, n=6 y n=8
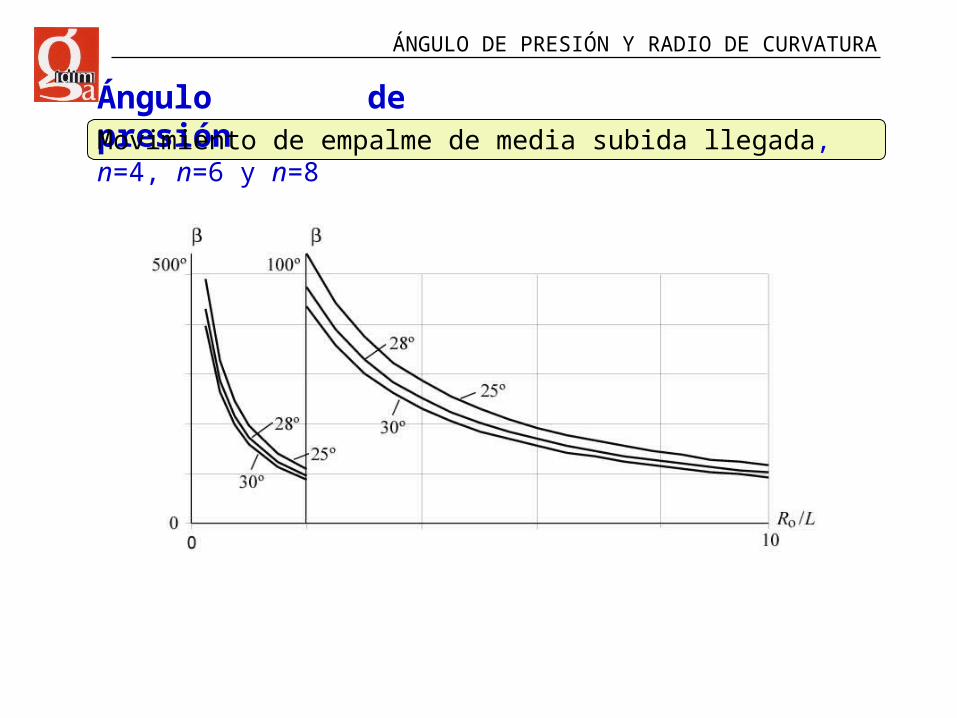
ÁNGULO DE PRESIÓN Y RADIO DE CURVATURA
Ángulo de presiónMovimiento de empalme de media subida llegada, n=4, n=6 y n=8

ÁNGULO DE PRESIÓN Y RADIO DE CURVATURA
Radio de curvaturaMovimiento de transición de altura de subida completa C2
ÁNGULO DE PRESIÓN Y RADIO DE CURVATURA
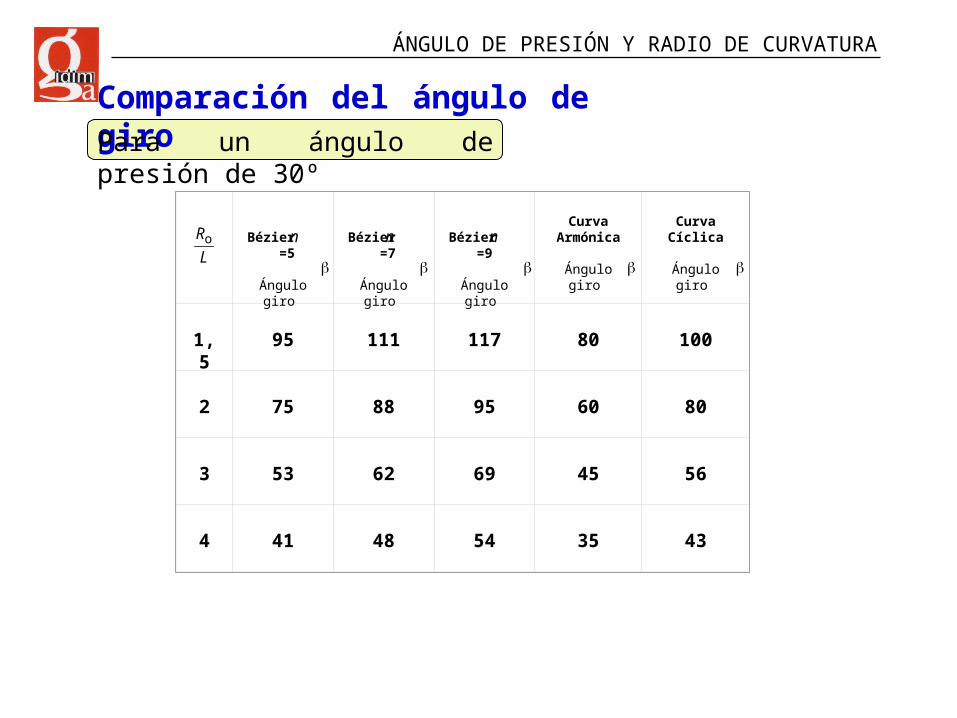
Comparación del ángulo de giroPara un ángulo de presión de 30º
oR
Ln
n
n
Bézier =5
Ángulo giro
Bézier =7
Ángulo giro
Bézier =9
Ángulo giro
Curva Armónica
Ángulo giro
CurvaCíclica
Ángulo giro
1,5 95 111 117 80 100
2 75 88 95 60 80
3 53 62 69 45 56
4 41 48 54 35 43

ÁNGULO DE PRESIÓN Y RADIO DE CURVATURA
Comparación del radio de curvaturaEn función del radio de curvatura y del radio del rodillo
oR
L
n
c rr R
n
c rr R
n
c rr Rc rr R c rr R
Bézier =5
Bézier =7
Bézier =9
Curva Armónica
CurvaCíclica
1,5 2,76 2,46 2,22 3,6 2,67
2 1,79 1,6 1,45 2,2 1,74
3 2,65 2,4 2,20 2,79 2,55
4 3,56 3,26 3,01 3,68 3,40
100º

CONCLUSIONES
Se concluye que las leyes de desplazamiento pueden ser diseñadas por tramos de unión o por trayectos completos de movimiento de la leva y que los dos métodos indistintamente tienen óptimos resultados de diseño.
Se concluye que a pesar del comportamiento óptimo que presentan los diferentes grados de las curvas de Bézier, la curva n=4 (movimiento de empalme de media subida inicio y media subida llegada) y la curva n=5 (movimiento de transción de altura de subida completa) no deben utilizarse para el diseño de levas de alta velocidad debido a la discontinuidad presente en la tercera derivada.
Conclusiones I
Se muestra nomogramas que ayudan a obtener los valores del ángulo de presión y del radio de curvatura en la etapa de la comprobación del perfil de la leva.
CONCLUSIONES
Conclusiones II
De la comparación de las curvas de Bézier para el tramo de transición de altura de subida completa se concluye que la curva que mejor bondad presentan respecto a los otros grados es la n=5 debido a que presenta menor valor de ángulo de presión para condiciones similares de trabajo y en lo referente al radio de curvatura porque es la que menor posibilidad presenta de obtener un valor negativo indeseado de radio de curvatura.
Del análisis de los ejemplos se concluye que la curva de Bézier de grado n=5 nuevamente es la que mejor se comporta debido a que presenta valores de esfuerzo menores, lo que conlleva a que tenga mejores condiciones para el diseño final de la leva.
CONCLUSIONES
Conclusiones III
De comparar las curvas de Bézier y las curvas tradicionales se concluye que las curvas armónicas presentan mejores bondades para el diseño de las levas debido a que presentan menor valor de ángulo de giro mínimo necesario para no exceder el valor de 30º recomendado de ángulo de presión.
Igualmente se concluye que son las que presentan mayor valor de la relación lo que con lleva a que disminuya la posibilidad de encontrar un valor de radio de curvatura negativo.
c rR R

Desventajas de los métodos tradicionales:
– Los coeficientes de las expresiones no tienen significado geométrico. Por lo tanto la modificación de un determinado coeficiente no produce un efecto intuitivo sobre la forma de la función.
– Los coeficientes de los polinomios se obtienen al solucionar un sistema de ecuaciones. Sería engorroso automatizar la definición de la ley porque cada caso requiere un tratamiento particular.
– La base canónica de polinomios algebraicos no garantiza estabilidad numérica, especialmente si el grado del polinomio es elevado.
– La imposición de las condiciones de continuidad en la unión entre los tramos de detención, subida y bajada de la ley de desplazamiento resulta laborioso.
Especificación de la ley de desplazamiento del palpador
ESTADO ACTUAL EN EL DISEÑO DE MECANISMO LEVA-PALPADOR

Conclusiones
Se concluye que las leyes de desplazamiento pueden ser diseñadas por curvas de Bézier utilizando tramos de unión o trayectos completos de movimiento, obteniendo siempre óptimos resultados de diseño.
Conclusiones
Gracias
¿Quien invita? .
Conclusiones
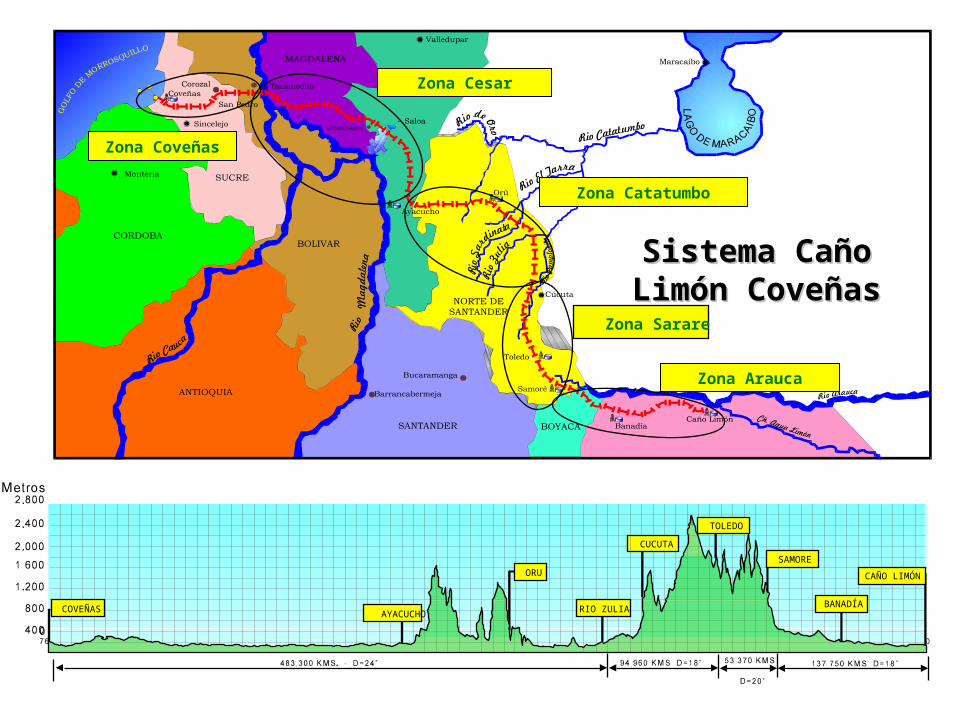
Sistema Caño Sistema Caño Limón CoveñasLimón Coveñas
Zona Sarare
Zona Arauca
CAÑO LIMÓN
BANADÍA
SAMORE
TOLEDO
CUCUTA
ORU
AYACUCHOCOVEÑAS RIO ZULIA
Zona Catatumbo
Zona Cesar
Zona Coveñas