Clasificacion de Leucocitos utilizando Vision por Computadora
174
-
Upload
ricardo-solano -
Category
Documents
-
view
4.462 -
download
6
description
This master thesis approaches the problemn of recognizing white blood cells in images by means of Computer vision
Transcript of Clasificacion de Leucocitos utilizando Vision por Computadora


UNIVERSIDAD AUTONOMA DE TLAXCALA
Facultad de Ciencias Basicas, Ingenierıa y Tecnologıa
DIVISION DE ESTUDIOS DE POSGRADO
Clasificacion de Leucocitos utilizando Vision por Computadora
Tesis
Que para obtener el grado de:
Maestro en Ciencias en Ingenierıa en Computacion
Presenta:
Marıa del Rocıo Ochoa Montiel
Asesor:
M. en C. Ricardo Solano Monje
Apizaco,Tlax. Abril del 2006



Propiedad literaria c©2006 por Marıa del Rocıo Ochoa Montiel.
U.A.T. Todos los Derechos Reservados.


Dedicatoria
A mi familia.

IV

Indice general
Indice general V
Indice de figuras IX
Indice de tablas XVII
Prefacio XIX
Motivacion personal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
Organizacion de la Tesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xix
Resumen XXIII
1. Introduccion 1
2. Antecedentes 5
2.1. ¿Como identificar leucocitos empleando vision por computadora? . . . . . . 5
2.2. Hipotesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3.1. Objetivo General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3.2. Objetivos Especıficos . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4. Metodo de solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.5. Hardware y software utilizado . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5.1. Hardware . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5.2. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
VI INDICE GENERAL
3. Fundamentos 11
3.1. Conceptos biologicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1.1. Composicion de la sangre humana . . . . . . . . . . . . . . . . . . . 12
3.1.2. Recuento Diferencial . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2. Conceptos Estadısticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.1. Metricas de similitud . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.2.2. Analisis de Componentes Principales –PCA– . . . . . . . . . . . . . 25
3.3. Analisis de imagenes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3.1. Segmentacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.2. Filtrado espacial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4. Extraccion de caracterısticas . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5. Redes Neuronales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.5.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.5.2. Tipos de Redes Neuronales . . . . . . . . . . . . . . . . . . . . . . . 40
3.5.3. Entrenamiento por Retropropagacion . . . . . . . . . . . . . . . . . 44
3.6. Tecnicas de Validacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4. Estado del Arte 53
4.1. Segmentacion de una imagen celular para diagnostico patologico . . . . . . 53
4.2. Automatizacion del Recuento Diferencial de la sangre . . . . . . . . . . . . 56
4.3. Mejorado automatico de deteccion de piel en imagenes de color . . . . . . . 57
4.4. Identificacion automatica de objetos aereos usando Redes Neuronales . . . . 58
4.5. Analisis de imagen y aprendizaje supervisado en la diferenciacion automati-
ca de celulas blancas de imagenes microscopicas . . . . . . . . . . . . . . . . 60
4.6. Localizacion y rastreo de rostros humanos con Redes Neuronales . . . . . . 62
4.7. Localizacion de rostros humanos en Tiempo Real . . . . . . . . . . . . . . . 65
5. Clasificacion de leucocitos 69
5.1. Metodo para el reconocimiento de celulas sanguıneas Segmentadas y No
Segmentadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69

INDICE GENERAL VII
5.2. Etapas en la solucion del problema . . . . . . . . . . . . . . . . . . . . . . . 70
5.3. Metodo de clasificacion de leucocitos . . . . . . . . . . . . . . . . . . . . . . 71
5.3.1. Adquisicion y Preprocesamiento de la imagen . . . . . . . . . . . . . 72
5.3.2. Segmentacion en color . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.3.3. Extraccion de caracterısticas . . . . . . . . . . . . . . . . . . . . . . 81
5.3.4. Entrenamiento de la red . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.3.5. Reconocimiento de observaciones originales . . . . . . . . . . . . . . 94
6. Pruebas y analisis de resultados 95
6.1. Pruebas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6.1.1. Adquisicion y preprocesamiento de la imagen . . . . . . . . . . . . . 95
6.1.2. Segmentacion de la imagen . . . . . . . . . . . . . . . . . . . . . . . 98
6.1.3. Extraccion de caracterısticas . . . . . . . . . . . . . . . . . . . . . . 105
6.1.4. Entrenamiento de la Red Neuronal . . . . . . . . . . . . . . . . . . . 109
6.2. Analisis de resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
7. Conclusiones 117
7.1. Conclusiones generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
7.2. Trabajo a Futuro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Referencias 121
A. Espacios de color 127
A.1. Espacio RGB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
A.2. Espacio TSL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
A.3. Espacio HSI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
A.4. Los espacios XYZ, Luv, Lab . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
A.5. Los espacios de color YIQ, YUV, YCbCr y YCC . . . . . . . . . . . . . . . 131
A.6. El espacio CMY(K) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
B. Galerıa de imagenes 133

VIII INDICE GENERAL
C. Listado de modulos que componen el metodo de clasificacion 141
Indice alfabetico 143
Indice de figuras
1.1. Contadores hematologicos. . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1. Proceso de reconocimiento de celulas sanguıneas. . . . . . . . . . . 7
2.2. Hardware utilizado en el sistema de vision. . . . . . . . . . . . . . . . 9
3.1. Componentes de una celula basica. . . . . . . . . . . . . . . . . . . . . 12
3.2. Componentes de la sangre humana. . . . . . . . . . . . . . . . . . . . . 13
3.3. Porcentajes normales en un Recuento Diferencial. . . . . . . . . . . 14
3.4. Tipos de leucocitos y sus caracterısticas. . . . . . . . . . . . . . . . . 16
3.5. Preparacion de frotis sanguıneo. . . . . . . . . . . . . . . . . . . . . . 16
3.6. Observacion y conteo de leucocitos. . . . . . . . . . . . . . . . . . . . 17
3.7. Tecnologıa VCS. a) Preparacion de la muestra. b) Volumen. b) Conduc-
tividad. d) Dispersion. e) Pruebas simultaneas. . . . . . . . . . . . . . . . . 19
3.8. Contadores Hematologicos. . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.9. Grafica representativa de una Distribucion Gaussiana . . . . . . . . 24
3.10. Proyeccion sobre el plano definido por las variables X1 y X2 . . . . 24
3.11. Modelo de un sistema de vision. . . . . . . . . . . . . . . . . . . . . . . 27
3.12. Procedimiento para implementar el Filtro de la mediana. . . . . . . 31
3.13. Diseno de un sistema de reconocimiento de patrones. . . . . . . . . 32
3.14. Caracterısticas morfologicas de una region. . . . . . . . . . . . . . . . 33
3.15. Momentos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34

X INDICE DE FIGURAS
3.16. Dos curvas de contornos sencillos y sus correspondientes firmas de
distancia-angulo. En (a) r(θ) es constante. En (b) r(θ) = A sec(θ). . . . . 36
3.17. Regiones con numero de Euler -2 y 0, respectivamente. . . . . . . . 36
3.18. Convex Hull. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.19. De la neurona biologica a la neurona artificial. . . . . . . . . . . . . . 38
3.20. Proceso basico de una red neuronal. . . . . . . . . . . . . . . . . . . . 39
3.21. Esquema basico de una neurona artificial que contiene una sola
entrada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.22. Funciones de transferencia de uso comun. . . . . . . . . . . . . . . . . 41
3.23. Clasificacion de las redes neuronales. . . . . . . . . . . . . . . . . . . . 41
3.24. Modelo de red neuronal multicapa alineada hacia adelante (pro-
gresiva). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.1. Proceso de segmentacion de imagenes celulares para diagnostico
patologico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.2. Imagen de un leucocito tıpico. La imagen segmentada se presenta en
pseudocolor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.3. Calidad de la segmentacion. a). Imagenes originales, arriba una celula de
linfoma de Mantle y las dos de abajo son especımenes de leucemia linfocıtica
cronica. b). Contornos. c). Celulas segmentadas. . . . . . . . . . . . . . . . . 55
4.4. Segmentacion de nucleos de varias categorıas de celulas. El borde
del nucleo esta marcado con blanco. . . . . . . . . . . . . . . . . . . . . . . 55
4.5. Esquema de segmentacion. a). Generacion de subimagenes conteniendo
celulas solas. b). Segmentacion de nucleos y citoplasmas. . . . . . . . . . . . 56
4.6. Secuencia de procesamiento. a. Imagen original. b. Imagen saturada. c.
Salida K-medias. d. Salida final. . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.7. Esquema de la deteccion automatica de piel en imagenes de color. 58
4.8. Secuencia de procesamiento. Imagen original y resultados obtenidos des-
pues de aplicar la segmentacion. . . . . . . . . . . . . . . . . . . . . . . . . 58

INDICE DE FIGURAS XI
4.9. Componentes del sistema de clasificacion de objetos aereos. Adqui-
sicion de caracterısticas y entrenamiento de la red neuronal. . . . . . . . . . 59
4.10. Aviones utilizados en el estudio. . . . . . . . . . . . . . . . . . . . . . . 59
4.11. Sistema de clasificacion de celulas blancas sanguıneas. . . . . . . . . 60
4.12. Ejemplos de imagenes completas utilizadas en la investigacion. De
izquierda a derecha: basofilo, eosinofilo, linfocito, neutrofilos. . . . . . . . . 61
4.13. Eosinofilo. Resultados de la deteccion de bordes Canny. . . . . . . . . . . 61
4.14. Ejemplos de cırculos ajustados manualmente. Resultados del algorit-
mo de deteccion de cırculos. . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.15. Estructura del sistema de localizacion y rastreo de rostros humanos. 63
4.16. Localizacion de un rostro. a). Imagen original b). Imagenes en secuencia
c). Diferencia de las dos imagenes d). Conjunto de pixeles con caracterısticas
de movimiento e). Aplicacion del clasificador general de color de rostros
–GFCC– f). Conjunto de pixeles con caracterısticas de color de piel g).
Objetos con caracterısticas de movimiento y color de piel h). Objetos mas
grandes i). Rostro localizado. . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.17. Creacion del clasificador de color de rostros. a). Primero se escoge un
area de interes en la imagen b). Se crea un modelo de distribucion de color
para el area seleccionada c). Se umbraliza como pixeles de piel aquellos que
posean valores que se encuentren dentro de la media promedio. . . . . . . . 64
4.18. Localizacion de un rostro utilizando el modelo de color de piel. . . 65
4.19. Ejemplo de localizacion de un rostro usando una combinacion de
color, geometrıa, e informacion de movimiento. . . . . . . . . . . . . 67
5.1. Organizacion general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.2. Proceso de adquisicion de la imagen. . . . . . . . . . . . . . . . . . . . 72
5.3. Procedimiento de instalacion de la camara. Izq.- Montaje de Acceso-
rios. Der.- Camara ajustada al microscopio. . . . . . . . . . . . . . . . . . . 74
5.4. Tipos de Leucocitos. Segmentados: neutrofilo y eosinofilo, No Segmenta-
dos: linfocito y monocito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74

XII INDICE DE FIGURAS
5.5. Celula segmentada neutrofila. . . . . . . . . . . . . . . . . . . . . . . . 75
5.6. Desarrollo del proceso de segmentacion. . . . . . . . . . . . . . . . . . 76
5.7. Histogramas de los canales RGB de un recorte de nucleo de una
celula segmentada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5.8. Diferencias entre d1 y d2. . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5.9. Resultados de Filtro inicial aplicado a una celula segmentada. . . . 78
5.10. Umbralizacion con el Modelo de Mahalanobis. a)Imagen original.
b)Imagen despues de aplicar filtro inicial. c)Imagen despues de aplicar mo-
delo de Mahalanobis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.11. Extraccion de caracterısticas. . . . . . . . . . . . . . . . . . . . . . . . 82
5.12. Almacenamiento de las caracterısticas estructurales. . . . . . . . . . 83
5.13. Metodo para el calculo de las caracterısticas radiales. . . . . . . . . 87
5.14. Almacenamiento de las caracterısticas radiales obtenidas aleato-
riamente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.15. Izquierda. Perımetro de un nucleo. Centro. Puntos escogidos para formar
V ′ en el escalamiento aleatorio. Derecha. Puntos escogidos para formar V ′
en el escalamiento lineal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.16. A la izquierda: Region nuclear de una celula segmentada. A la derecha:
Perımetro de la region de la izquierda. . . . . . . . . . . . . . . . . . . . . . 89
5.17. Perımetro de la region de interes. Arriba. Representacion del perıme-
tro en el dominio del tiempo. Abajo. Representacion del perımetro en el
dominio de la frecuencia, considerando solo la parte de magnitud despues
de aplicar la FFT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.18. Almacenamiento de las caracterısticas obtenidas despues de apli-
car FFT. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.1. Recoleccion de muestras sanguıneas. Izquierda. Eleccion del paciente.
Centro. Extraccion de la sangre. Derecha. Preparacion y tincion del frotis. . 96

INDICE DE FIGURAS XIII
6.2. Adquisicion de las observaciones. Izquierda: Gota de aceite sobre el
frotis. Centro: Colocacion del frotis sobre la base del microscopio. Derecha:
Campo visto a traves de la camara. . . . . . . . . . . . . . . . . . . . . . . . 97
6.3. Campos vistos al microscopio con diferentes aumentos. Izquierda:
Utilizando el objetivo de 40X. Derecha: Utilizando el objetivo de 100X. . . 97
6.4. Tipos de globulos blancos. Arriba.- Segmentados: Neutrofilo, Eosinofilo,
Basofilo. Abajo.- No Segmentados: Linfocito y monocito. . . . . . . . . . . . 98
6.5. Globulos blancos digitalizados. . . . . . . . . . . . . . . . . . . . . . . 98
6.6. Recorte de nucleo de una celula de la clase Segmentada. . . . . . . 99
6.7. Histogramas de los canales RGB de 4 tipos de recortes de nucleos.
La primera fila de histogramas corresponde a una celula Segmentada Eo-
sinofila. La segunda fila de histogramas pertenece a una celula Segmentada
Neutrofila. La tercera fila de histogramas es de una celula No Segmentada
linfocıtica. La cuarta fila es de una celula No Segmentada Monocıtica . . . . 100
6.8. Resultados del filtro inicial. a).- Celula Segmentada Eosinofila. b).-
Celula Segmentada Neutrofila. c).- Celula No Segmentada linfocıtica.
d).- Celula No Segmentada Monocıtica . . . . . . . . . . . . . . . . . . . 101
6.9. Resultados del filtro inicial aplicado a imagenes muy claras. a).-
Celula No Segmentada Monocıtica. b).- Celula Segmentada Neutrofila.
c) y d) Celulas Segmentadas eosinofila. . . . . . . . . . . . . . . . . . . . 101
6.10. Resultados del filtro inicial aplicado a imagenes obscuras. La celula
que esta en la parte superior izquierda es un neutrofilo y las demas son
eosinofilos, ambas pertenecientes a la clase segmentados. . . . . . . . . . . 102
6.11. Resultados del filtro inicial aplicado a imagenes de celulas semi-
destruidas. En este caso la claridad no se considera. . . . . . . . . . . . . . 102
6.12. Resultados del filtro inicial aplicado a imagenes de celulas con el
nucleo muy dividido. En este caso la claridad no se considera. . . . . . . 103
6.13. Conversion del espacio de color RGB a TSL. . . . . . . . . . . . . . . 103
6.14. Union de los vectores T y S de los n Recortes de nucleos. . . . . . 103

XIV INDICE DE FIGURAS
6.15. Correlacion entre las variables Tono y Saturacion correspondientes
a los vectores T y S, respectivamente. Los valores de T son normalizados.105
6.16. Resultados de la segmentacion del nucleo de un monocito. . . . . . 105
6.17. Matriz de caracterısticas estructurales. Las columnas denotadas con
Si representan a las caracterısticas de celulas Segmentadas mientras que
las que se denotan con Ni indican a las caracterısticas de celulas No Seg-
mentadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.18. Matriz de caracterısticas estructurales con analisis de varianza. . . 108
6.19. Matriz de caracterısticas radiales utilizando escalamiento con trans-
formacion lineal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.20. Tipos de entrenamiento y funciones de transferencia. . . . . . . . . 110
6.21. Distribucion de las observaciones para la experimentacion. . . . . . 110
6.22. Distribucion de las observaciones por clase. . . . . . . . . . . . . . . . 111
6.23. Resultados de las configuraciones utilizando diferentes observacio-
nes de celulas Segmentadas y No Segmentadas. . . . . . . . . . . . . 112
6.24. Comportamiento de entrenamiento utilizando diferentes observa-
ciones de celulas Segmentadas y No Segmentadas con caracterısti-
cas estructurales y radiales. . . . . . . . . . . . . . . . . . . . . . . . . . 113
A.1. Diagrama esquematico de los 3 ejes del sistema de color Mun-
sell.Tomado de Hall, E.L. Computer Image Processing and Recognition.
Academic Press, New York. 1979 . . . . . . . . . . . . . . . . . . . . . . . . 129
B.1. Leucocitos segmentados: Eosinofilos. (Continua) . . . . . . . . . . . . 134
B.2. Leucocitos segmentados: Eosinofilos. (Continuacion) . . . . . . . . . . 135
B.3. Leucocitos segmentados: Neutrofilos. (Continua) . . . . . . . . . . . . 136
B.4. Leucocitos segmentados: Neutrofilos. (Continuacion) . . . . . . . . . . 137
B.5. Leucocitos no segmentados: Linfocitos. (Continua) . . . . . . . . . . . 138
B.6. Leucocitos no segmentados: Linfocitos. (Continuacion) . . . . . . . . . 139
B.7. Leucocitos no segmentados: Monocitos. . . . . . . . . . . . . . . . . . 139

INDICE DE FIGURAS XV
B.8. Casos especiales. En b1 y b2 se observan celulas basofilas pertenecientes
a la clase segmentados, es un tipo de celula que por su rareza fue excluıda
de las pruebas hechas en la investigacion. DOSe66-n contiene abajo un
neutrofilo pequeno, arriba un eosinofilo con el nucleo parcialmente destruido
y distribuido en el citoplasma. DOSe103-mono muestra arriba a la izquier-
da un eosinofilo y abajo a la derecha un monocito. En DOSl40mono3 se
observa arriba a la derecha un monocito y abajo a la izquierda un linfocito.
DOSn28linfo10 arriba a la derecha presenta un neutrofilo grande y abajo
a la izquierda un linfocito. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140


Indice de tablas
3.1. Caracterısticas que permiten describir la forma de una region. . . 35
4.1. Principales trabajos relacionados . . . . . . . . . . . . . . . . . . . . . 66
5.1. Caracterısticas estructurales. . . . . . . . . . . . . . . . . . . . . . . . 83
5.2. Caracterısticas estructurales iniciales para el analisis de varianza. 84
5.3. Resultados del analisis de varianza para 17 caracterısticas estruc-
turales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.4. Caracterısticas estructurales obtenidas con el analisis de varianza. 86
C.1. Principales funciones programadas . . . . . . . . . . . . . . . . . . . . 142


Prefacio
Motivacion personal
La fuerza motivadora para la realizacion de este trabajo de tesis ha sido el interes por
aplicar tecnicas de vision por computadora en el area del analisis clınico, encaminado a
encontrar un metodo que permita a la computadora realizar el proceso de vision como lo
harıa el ser humano en la identificacion de celulas sanguıneas.
Ası, el objetivo principal es proponer una tecnica que permita identificar leucocitos y
clasificarlos biologicamente en segmentados y no segmentados.
La tecnica propuesta no pretende competir con las maquinas disponibles en el mercado
que son capaces de realizar tareas similares empleando mecanismos no visuales. Tampoco
es una meta de este trabajo obtener un sistema listo para ser utilizado en el area clınica
y reemplazar a los metodos ya existentes, debido a que el analisis visual consume mas
tiempo que los metodos fısico-quımicos. Ademas la automatizacion completa requiere de
un sistema que permita la manipulacion del microscopio para la adquisicion de la imagen,
lo cual resulta difıcil aun para un experto del area clınica.
Organizacion de la Tesis
Este trabajo de tesis se ha dividido en 7 capıtulos que progresivamente llevaran al lec-
tor a tener una idea clara del proceso de Clasificacion de Celulas Sanguıneas empleando
tecnicas de Vision por computadora.
En el primer Capıtulo, se encontrara un resumen sobre la situacion actual en el area

XX
de los analisis clınicos respecto al proceso de identificacion y clasificacion de celulas san-
guıneas, en especial de leucocitos o globulos blancos. Ademas se presenta un bosquejo
general acerca de la problematica abordada en este trabajo y su metodo de solucion.
En el Capıtulo 2 se presenta la definicion del problema, ası como las propuestas de
solucion, objetivos y material utilizado en el transcurso de la investigacion.
El Capıtulo 3 es dedicado a la explicacion de los antecedentes teoricos, necesarios pa-
ra el entendimiento de las secciones posteriores; incluyendo topicos como definiciones de
elementos biologicos y hematologicos, tecnicas de preparacion de las muestras biologicas
y metodos de clasificacion de las mismas, conceptos estadısticos, teorıa de procesamiento
de imagenes, extraccion de caracterısticas, redes neuronales y tecnicas de validacion de
resultados.
En el Capıtulo 4 se comentan algunos trabajos relacionados con el problema aborda-
do en esta tesis, considerando principalmente aquellos que se relacionan con tecnicas de
segmentacion en color.
En el Capıtulo 5 se describe el diseno y la implementacion del proceso de identificacion
y clasificacion de leucocitos Segmentados y No segmentados.
En el Capıtulo 6 se muestran las pruebas realizadas y se comentan los resultados obte-
nidos.
En el Capıtulo 7 estan las conclusiones y sugerencias para trabajos futuros.
Esperando sea util para futuros trabajos de investigacion, se anexa la base de datos
utilizada en formato digital, ademas de los codigos fuente correspondientes a las funciones
implementadas incluyendo algunos experimentos adicionales que no se reportan en este
trabajo, ası como el codigo latex que produjo este documento.
Marıa del Rocıo Ochoa Montiel1
Asesor: M. en C. Ricardo Solano Monje2.
Apizaco, Tlax. Abril 2006.
1Email: [email protected]: [email protected]

Agradecimientos
A todas las personas que de manera incondicional, brindaron parte de su valioso tiempo
para conocer y hacer posible la realizacion de este trabajo.
Para empezar quiero agradecer a mi tıa Genobeba Montiel Corona, quien me ha apo-
yado mucho al hacerse cargo del cuidado de mis hijos y las labores domesticas para que
yo pudiera dedicar el tiempo necesario para hacer posible la realizacion de este trabajo de
tesis.
Doy gracias a mi asesor por su apoyo y guıa en las actividades involucradas en la rea-
lizacion de este trabajo y por sus consejos para que esta tesis fuera posible.
Tambien deseo agradecer al M. en C. Jose Alberto Chavez Aragon3 por las sugerencias
que permitieron mejorar este trabajo de tesis.
Agradezco al Dr. Francisco J. Albores Velasco4 por su apoyo persistente y desinteresado
en la resolucion de mis problemas matematicos.
Quiero agradecer especialmente al M. en C. Orion Fausto Reyes Galaviz5 por la revision
desinteresada de mi trabajo de tesis y por su disposicion constante en las revisiones del
codigo correspondiente al uso de Redes Neuronales.
Al Dr. Isaıas Lopez Morales6, al Dr. Manuel Hernandez Gutierrez7 y al M. en C.
3Catedratico del area de Computacion en la Facultad de Ingenierıa y Tecnologıa.Email: [email protected]
4Catedratico del area de Computacion en la Facultad de Ingenierıa y Tecnologıa.Email: [email protected]
5Catedratico del area de Computacion en la Facultad de Ingenierıa y Tecnologıa.Email: [email protected]
6Catedratico del area de Matematicas Aplicadas en la Facultad de Ciencias Basicas.Email: [email protected]
7Catedratico del area de Computacion en la Facultad de Ingenierıa y Tecnologıa.
XXII
Jose Erasmo Perez Vazquez8 por su apoyo en la resolucion de mis dudas relacionadas con
el codigo Latex producido de esta tesis.
No menos importante es agradecer a Laboratorios Biodiagnostics por prestar sus ins-
talaciones y equipo clınico para la obtencion de las muestras biologicas y especialmente
reconocer el trabajo realizado por el Q.F.B. Gonzalo Romero Tirso en las tareas de reco-
leccion y preparacion de los frotis sanguıneos ası como su valioso apoyo en la identificacion
de las celulas que se utilizaron en este trabajo de tesis.
Finalmente, al M. en C. Antonio Durante Murillo9 agradezco las facilidades brindadas
durante el proceso administrativo y que han permitido que este trabajo concluya exitosa-
mente.
A todos mis colegas que me han hecho crıticas y sugerencias, mil gracias.
8Catedratico del area de Matematicas Aplicadas en la Facultad de Ciencias Basicas.Email: [email protected]
9Director de la Facultad de Ciencias Basicas, Ingenierıa y Tecnologıa.
Resumen
El proposito de este trabajo de tesis es utilizar vision por computadora para identificar
y clasificar celulas sanguıneas. Estas celulas estan contenidas en un conjunto de image-
nes adquiridas a traves de un sistema de vision. El metodo propuesto esta basado en un
algoritmo de segmentacion que fue utilizado originalmente para la segmentacion de piel.
Adicionalmente, se utilizo una red neuronal para la tarea de clasificacion.
El algoritmo de segmentacion adaptado permite crear un modelo de color, y haciendo
uso de este modelo se realiza el proceso de segmentacion. Esto permite extraer las carac-
terısticas de la region de interes. Hay 3 tipos de caracterısticas extraıdas: estructurales,
estructurales con analisis de varianza y radiales.
El proceso de identificacion esta constituido por un sistema de aprendizaje – la red
neuronal –, la cual es entrenada con las caracterısticas mencionadas anteriormente. Los
resultados se basan en el uso de una red neuronal de retropropagacion, utilizando ya sea
caracterısticas estructurales, estructurales con analisis de varianza o radiales para la etapa
de entrenamiento.
El primer conjunto de datos de entrenamiento consistio de 13 atributos de la region de
interes. El ındice de reconocimiento obtenido con este conjunto fue de 84.54%.
El segundo conjunto de datos de entrenamiento fue formado por 8 caracterısticas ob-
tenidas despues de realizar un analisis de varianza a un subconjunto de 17 caracterısticas
estructurales. En este caso se obtiene un ındice de reconocimiento del 85.82%.
El tercer conjunto de datos de entrenamiento consiste de 111 caracterısticas radiales,
que corresponden a las distancias del centro de masa de la region de interes a su perımetro.
Antes de usar este conjunto de datos para el entrenamiento de la red neuronal, se aplico la

XXIV
FFT(Transformada Rapida de Fourier –por sus siglas en ingles–) para eliminar variacio-
nes en las caracterısticas extraıdas relacionadas con la rotacion o escala, incrementando el
desempeno de la fase de clasificacion hasta en un 99.54 %.
En todos los casos, las caracterısticas se preprocesaron con PCA. El desempeno de la
fase de entrenamiento –el desempeno de la red neuronal–, se evaluo utilizando la tecnica
de validacion cruzada en 10 particiones.

Abstract
The purpose of this work is to use computer vision in order to identify and clasify blood
cells. These cells are extracted from a set of images which were adquired through a vision
system. The proposed method is based on segmentation algorithm, that was previously
used for skin segmentation. Additionally, a neural network was used for the classification
task.
The adapted segmentation algorithm allows to create a color model and making used
of this model the segmentation process is performed. This allows to extract the characte-
ristics of the region that concerns us. There are three types of extracted characteristics:
structurals, structurals with variance analysis and radials. The identification process is ac-
complished by means of a learning system -the neural network- which is trained with the
characteristics of the previous phase. The results are based on the use of a back-propagation
neural network, using the structural, structurals with variance analysis or radial characte-
ristics for the training phase.
The first set of training data consists of 13 attributes of the segmented region of inter-
est. The positive index obtained from this set was of 84.54%.
The second training data was made of 8 characteristics obtained from a variance analy-
sis of a subset of 17 structurals characteristics. In this case the recognition rate obtained
was 85.82 %.
The third training data set consisted of 111 radial characteristics which were corres-
ponded to the distances taken from the center of mass of the region of interest to its
perimeter. Before using this data set for training the neural network. The FFT (Fourier
Fast Transform) was applied in order to eliminate to variations in the extracted features

XXVI
such as rotation or scaling changes. As a result, the classification performance increased up
to 99.54%. In every case the characteristics were propocessed with PCA. The performance
of the training phase –the neural network performance– were evaluated using the Ten Fold
Cross Validation approach.
Capıtulo 1
Introduccion
En instituciones de salud publica y privada se realizan examenes de laboratorio rela-
cionados con el analisis de sangre, uno de ellos es el Recuento Diferencial que consiste en
la identificacion, clasificacion y conteo de globulos blancos. El objetivo principal de esta
prueba es contribuir en conjunto con los resultados de otras pruebas de laboratorio, a
proporcionar al medico datos que ayuden a dar un diagnostico en un paciente, ademas de
formar parte de los analisis preoperatorios requeridos en intervenciones quirurgicas. Los
resultados de un Recuento Diferencial tambien son utiles en diagnosticos de leucemias,
parasitosis, cuadros infecciosos y anemia, entre otros [Oppenheim, 1998].
De esta manera una gran cantidad de celulas sanguıneas de la serie blanca1 son clasifi-
cadas en laboratorios clınicos utilizando microscopios , lo que resulta en una tarea subjetiva
y detallada [Ushizima et al., 2004]. Un tecnico clınico capacitado toma de 10 a 15 minutos
para evaluar y contar 100 celulas para cada laminilla2, un tiempo considerable y susceptible
para que ocurra un error en el analisis.
Debido a la importancia que este tipo de analisis tiene, sus aplicaciones y el volu-
men de muestras que es necesario revisar diariamente, algunas instituciones de salud uti-
lizan maquinas capaces de realizar un cierto numero y tipo de analisis clınicos incluyendo
el Recuento Diferencial, disminuyendo en parte el riesgo para el humano al tener me-
nos contacto directo con muestras posiblemente infectadas. En la Figura 1.1, tomada de
1globulos blancos o leucocitos2muestra de frotis sanguıneo tenido para recuento diferencial
2 1 INTRODUCCION
Figura 1.1: Contadores hematologicos.
[Beckman Coulter, 2006] se muestran dos tipos de maquinas empleadas en analisis clınicos.
Sin embargo, la desventaja de realizar los analisis empleando maquinas de este tipo
es que su mantenimiento es costoso, ademas de que son productos caros que no propor-
cionan resultados completos y certeros en el examen llamado Recuento Diferencial debido
posiblemente a que los mecanismos que emplean para hacer esta diferenciacion se basan
en metodos fısicos y quımicos, no en un analisis visual; hecho que ha ocasionado que aun
se siga utilizando el metodo manual descrito en la seccion 3.1.2.
En busca de un metodo que permita realizar esta identificacion empleando vision por
computadora, surge este trabajo de tesis, el cual una vez terminado no pretende de ninguna
manera sustituir a los metodos tradicionales para la realizacion del Recuento Diferencial,
ya sea hecho por un experto o por una maquina sino encontrar una alternativa para el
analisis visual de especımenes biologicos y en un futuro servir como marco de referencia
para el desarrollo de una aplicacion que sirva de apoyo a los estudiantes del area clınica en
algunas instituciones educativas del nivel medio superior o superior.
Por otra parte, la imagen completa de un leucocito es insuficiente para diferenciarlos
de entre sus propios subtipos. Su clasificacion se realiza en principio considerando carac-
terısticas de la forma del nucleo de la celula.
El presente trabajo aborda por un lado el problema de reconocimiento de patrones
en el analisis de imagenes de sangre humana, y por otro el como la informacion de color
presente en su nucleo puede hacer posible la extraccion de caracterısticas que permitan
la diferenciacion de leucocitos en 2 subclases: leucocitos segmentados y leucocitos no
segmentados.
Como parte de la solucion propuesta se trabaja con un grupo de 354 muestras obteni-
das con una camara digital adaptada al ocular de un microscopio optico. Posteriormente se
3
utiliza un modelo propuesto por [Tomaz et al., 2003] para la segmentacion de piel humana
que se adapto para la segmentacion de nucleos celulares . Una vez obtenida la region de
interes se extraen caracterısticas que permiten clasificar a los leucocitos en dos clases: celu-
las segmentadas y celulas no segmentadas. El metodo usado para la clasificacion es
una red neuronal de retropropagacion que recibe como entrada un vector de caracterısticas
de cada nucleo extraıdo durante la segmentacion.
Finalmente se concluye que para el espacio de color utilizado, la deteccion eficiente
–segmentacion adecuada– depende de la capacidad del modelo de color para estimar la
distribucion de color del nucleo celular y, lo mas importante la discriminabilidad entre
distribuciones de nucleo y no nucleo.
Por otra parte, se comprobo que las caracterısticas radiales son buenos descriptores de
las formas nucleares de los leucocitos.
El aporte que se puede apreciar en este trabajo, es que el uso de un espacio de color
adaptado para nucleos celulares y la aplicacion de metodos estadısticos, son utiles en la
segmentacion en color de nucleos en leucocitos, permitiendo extraer caracterısticas que
permiten definir la forma del nucleo de la celula.
De esta manera, los resultados demuestran que es factible el uso de la tecnica pro-
puesta en el presente trabajo para el analisis de muestras biologicas, en las cuales es de
suma importancia la deteccion de anormalidades morfologicas y colorimetricas, ademas de
constituir una alternativa para el analisis e identificacion de cualquier tipo de objeto con
tecnicas de vision por computadora.


Capıtulo 2
Antecedentes
Este capıtulo refiere el problema de la segmentacion de celulas blancas y su clasificacion.
Se describe la hipotesis, los objetivos y el metodo de solucion propuesta. Finalmente se hace
mencion del hardware y software utilizado durante el desarrollo de esta tesis.
2.1. ¿Como identificar leucocitos empleando vision por compu-
tadora?
La respuesta a esta pregunta constituye la problematica principal de este trabajo de
tesis. La razon principal de intentar dar respuesta a esta pregunta es, por un lado en-
contrar un metodo que se asemeje al proceso realizado por un ser humano al tratar de
identificar celulas blancas, y por otro proponer una alternativa para la identificacion de
este tipo de muestras que este apoyada en tecnicas de vision por computadora. El metodo
de clasificacion propuesto consiste en determinar si una celula blanca es Segmentada o
No segmentada1 considerando su color y morfologıa nuclear. Se toman caracterısticas de
color y forma debido a que un experto humano identifica y clasifica a los globulos blancos
vistos en un frotis, detectando estas caracterısticas en primera instancia.
Como se comenta en la Introduccion de esta tesis, actualmente la mayorıa de los la-
1los terminos segmentada y no segmentada corresponden a una clasificacion en la cual se considera lamorfologıa nuclear para determinar ambas clases. El tipo segmentado corresponde a un nucleo fragmenta-do(dividido) y el no segmentado a un nucleo semicircular, sin divisiones.

6 2 ANTECEDENTES
boratorios clınicos en Mexico, realizan el analisis llamado Recuento Diferencial empleando
un metodo manual realizado por un experto.
2.2. Hipotesis
El tema principal de este trabajo esta directamente relacionado con tecnicas de vision
por computadora. Y como variable principal en el proceso de identificacion se utiliza el
color para la segmentacion y la morfologıa nuclear para la clasificacion, pues una buena
caracterizacion del nucleo es suficiente para ubicar a los globulos blancos en dos grupos:
segmentados y no segmentados. De esta manera, la hipotesis se enuncia de la siguiente
manera:
Es posible clasificar a los globulos blancos en segmentados y no segmentados uti-
lizando tecnicas de vision por computadora, especıficamente mediante la segmentacion en
color de los nucleos celulares, y el uso de caracterısticas que describen la forma dicho
nucleo: caracterısticas estructurales, caracterısticas estructurales con analisis de varianza
o caracterısticas radiales.
2.3. Objetivos
2.3.1. Objetivo General
Desarrollar un metodo que permita clasificar globulos blancos de sangre humana, en
segmentados y no segmentados a partir de imagenes digitalizadas obtenidas de una
camara adaptada a un microscopio optico.
2.3.2. Objetivos Especıficos
Revisar el procedimiento manual actualmente utilizado para modelar la solucion.
Analizar visualmente las celulas blancas para elegir las caracterısticas utilizadas en
su clasificacion.
Sustentar los resultados dentro de varias alternativas factibles.
2.4 Metodo de solucion 7
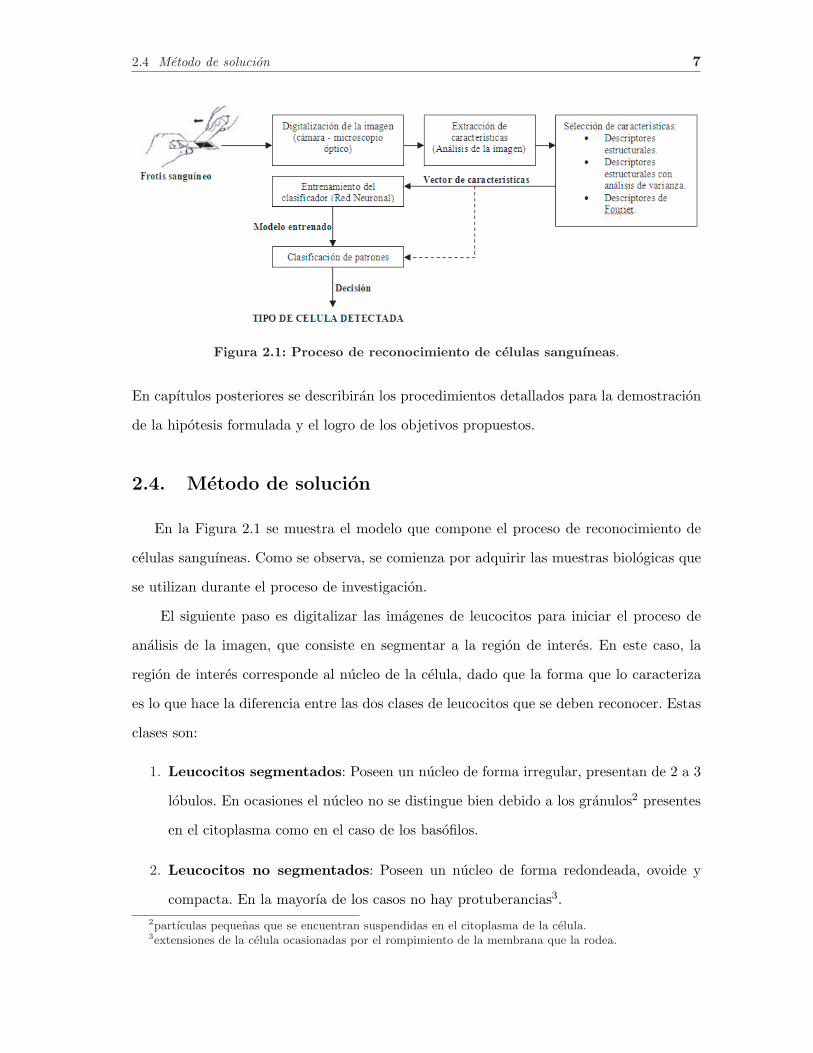
Figura 2.1: Proceso de reconocimiento de celulas sanguıneas.
En capıtulos posteriores se describiran los procedimientos detallados para la demostracion
de la hipotesis formulada y el logro de los objetivos propuestos.
2.4. Metodo de solucion
En la Figura 2.1 se muestra el modelo que compone el proceso de reconocimiento de
celulas sanguıneas. Como se observa, se comienza por adquirir las muestras biologicas que
se utilizan durante el proceso de investigacion.
El siguiente paso es digitalizar las imagenes de leucocitos para iniciar el proceso de
analisis de la imagen, que consiste en segmentar a la region de interes. En este caso, la
region de interes corresponde al nucleo de la celula, dado que la forma que lo caracteriza
es lo que hace la diferencia entre las dos clases de leucocitos que se deben reconocer. Estas
clases son:
1. Leucocitos segmentados: Poseen un nucleo de forma irregular, presentan de 2 a 3
lobulos. En ocasiones el nucleo no se distingue bien debido a los granulos2 presentes
en el citoplasma como en el caso de los basofilos.
2. Leucocitos no segmentados: Poseen un nucleo de forma redondeada, ovoide y
compacta. En la mayorıa de los casos no hay protuberancias3.2partıculas pequenas que se encuentran suspendidas en el citoplasma de la celula.3extensiones de la celula ocasionadas por el rompimiento de la membrana que la rodea.
8 2 ANTECEDENTES
En el proceso de analisis de la imagen se propone un modelo de color que permita realizar
una segmentacion automatica de los nucleos celulares, para delimitarlos de la mejor manera
posible y extraer caracterısticas que mejor describan su forma.
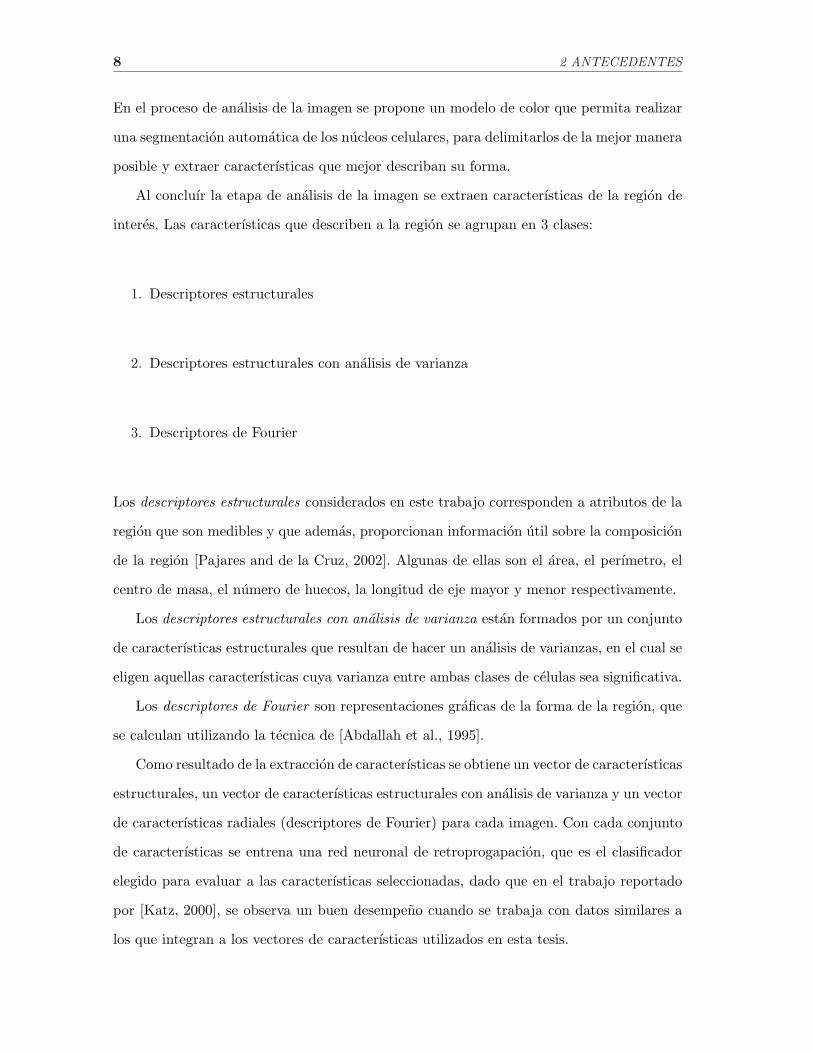
Al concluır la etapa de analisis de la imagen se extraen caracterısticas de la region de
interes. Las caracterısticas que describen a la region se agrupan en 3 clases:
1. Descriptores estructurales
2. Descriptores estructurales con analisis de varianza
3. Descriptores de Fourier
Los descriptores estructurales considerados en este trabajo corresponden a atributos de la
region que son medibles y que ademas, proporcionan informacion util sobre la composicion
de la region [Pajares and de la Cruz, 2002]. Algunas de ellas son el area, el perımetro, el
centro de masa, el numero de huecos, la longitud de eje mayor y menor respectivamente.
Los descriptores estructurales con analisis de varianza estan formados por un conjunto
de caracterısticas estructurales que resultan de hacer un analisis de varianzas, en el cual se
eligen aquellas caracterısticas cuya varianza entre ambas clases de celulas sea significativa.
Los descriptores de Fourier son representaciones graficas de la forma de la region, que
se calculan utilizando la tecnica de [Abdallah et al., 1995].
Como resultado de la extraccion de caracterısticas se obtiene un vector de caracterısticas
estructurales, un vector de caracterısticas estructurales con analisis de varianza y un vector
de caracterısticas radiales (descriptores de Fourier) para cada imagen. Con cada conjunto
de caracterısticas se entrena una red neuronal de retroprogapacion, que es el clasificador
elegido para evaluar a las caracterısticas seleccionadas, dado que en el trabajo reportado
por [Katz, 2000], se observa un buen desempeno cuando se trabaja con datos similares a
los que integran a los vectores de caracterısticas utilizados en esta tesis.

2.5 Hardware y software utilizado 9
Figura 2.2: Hardware utilizado en el sistema de vision.
2.5. Hardware y software utilizado
Los elementos que fueron utilizados en el desarrollo de este trabajo se mencionan a
continuacion.
2.5.1. Hardware
El hardware utilizado para el sistema de vision se muestra en la Figura 2.2. Las imagenes
fueron tomadas de [Mot, 2004].
La implementacion fue realizada en una computadora con un procesador INTEL Centrino
1.5Ghz y 512MB.
2.5.2. Software
El software utilizado en este trabajo consiste en:
Sistema operativo: Windows XP Home Edition version 2002 Service Pack 2.
Software de la camara: Motic Images 2000 version 1.2 [Mot, 2004].

10 2 ANTECEDENTES
Software de programacion: Matlab 6.0.0.88.

Capıtulo 3
Fundamentos
En este capıtulo se describen los conceptos basicos, necesarios para la plena compren-
sion del resto del trabajo de tesis. Se definen conceptos relacionados con citologıa, hema-
tologıa, procesamiento de imagenes, estadıstica, redes neuronales, y tecnicas de validacion
de resultados.
3.1. Conceptos biologicos
Para tener una descripcion mas amplia respecto a los elementos biologicos que consti-
tuyen el objeto de estudio en este trabajo de tesis, se describe la anatomıa y fisiologıa de
la celula.
Una celula es la unidad anatomica y fisiologica que compone a un ser vivo y esta for-
mada fundamentalmente por una membrana, un citoplasma y un nucleo. La membrana es
la parte que cubre a la celula y que visualmente representa su silueta marcando los lımites
entre ella y su entorno. El citoplasma es la parte que se encuentra despues de la mem-
brana en el cual estan suspendidos los organos internos de la celula, su consistencia puede
ser lıquida o viscosa. Dentro del citoplasma se encuentra el nucleo, que regularmente esta
situado en la parte central de la celula y es el encargado de controlar la actividad celular.
En la Figura 3.1, tomada de [Sanchez, 2006] se muestra un ejemplo senalando algunas de
sus partes.

12 3 FUNDAMENTOS
Figura 3.1: Componentes de una celula basica.
En ocasiones la celula es incolora, dificultando su analisis visual a traves de un micros-
copio. Al conocerse su composicion quımica es posible determinar que tipo de colorantes
usar (acidos o basicos) para tenirlas y poder visualizarlas distinguiendo mejor sus partes.
Debido a que en el nucleo se encuentra la informacion genetica de la celula y como conse-
cuencia los acidos nucleicos ADN1 y RDN2 [Wikipedia Foundation, 2006], su composicion
generalmente es acida, en cambio el citoplasma tiende a ser quımicamente mas basico3. Ası,
los nucleos de los leucocitos generalmente se tinen de morado en respuesta a los colorantes
utilizados para tenirlos.
3.1.1. Composicion de la sangre humana
La sangre humana es un compuesto formado por 2 elementos fundamentales, el plasma
y el paquete globular. El plasma es la parte lıquida de la sangre, mientras que el paquete
globular lo forman un conjunto de celulas que se encuentran suspendidas en el, como los
globulos rojos (eritrocitos), globulos blancos (leucocitos) y las trombocitos (plaquetas).
Cada uno de ellos tiene su funcion particular [Woodliff and Herrmann, 1993].
El color de la sangre esta determinado por la hemoglobina presente en los eritroci-
1acido desoxirribonucleico, constituye el materal genetico de los organismos.2acido ribonucleico, sirve como una plantilla para la traduccion de genes.3se refiere a que posee un PH alcalino.
3.1 Conceptos biologicos 13
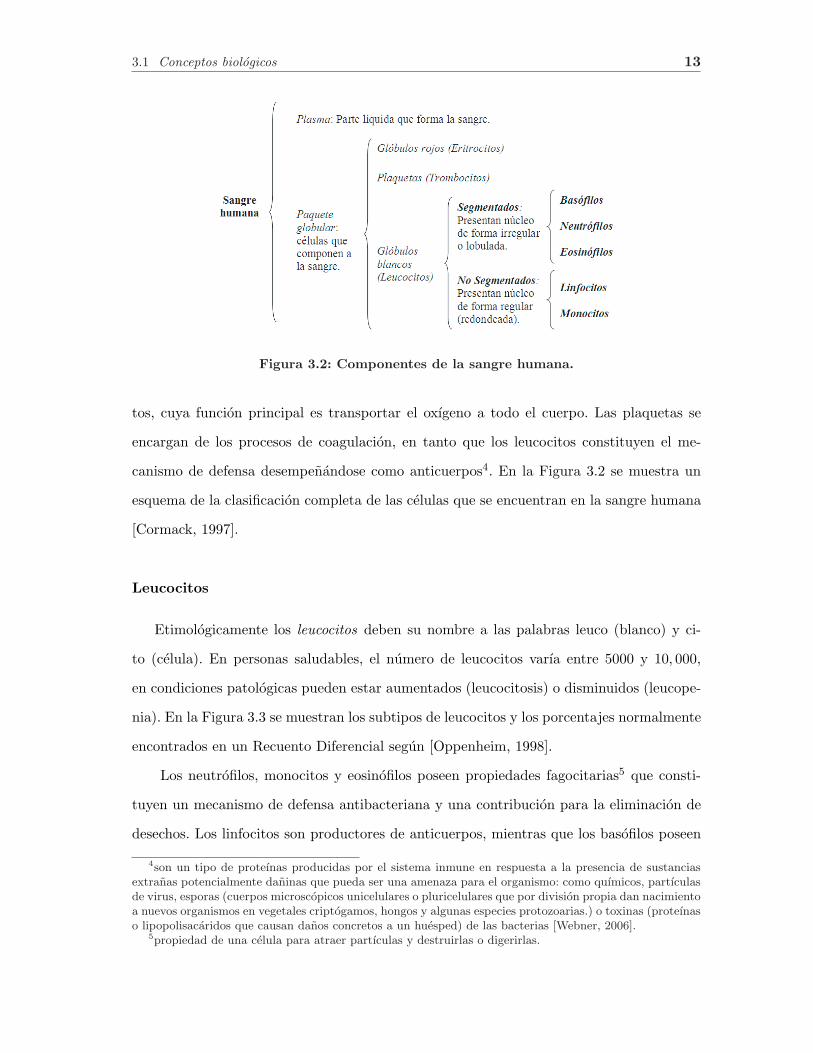
Figura 3.2: Componentes de la sangre humana.
tos, cuya funcion principal es transportar el oxıgeno a todo el cuerpo. Las plaquetas se
encargan de los procesos de coagulacion, en tanto que los leucocitos constituyen el me-
canismo de defensa desempenandose como anticuerpos4. En la Figura 3.2 se muestra un
esquema de la clasificacion completa de las celulas que se encuentran en la sangre humana
[Cormack, 1997].
Leucocitos
Etimologicamente los leucocitos deben su nombre a las palabras leuco (blanco) y ci-
to (celula). En personas saludables, el numero de leucocitos varıa entre 5000 y 10, 000,
en condiciones patologicas pueden estar aumentados (leucocitosis) o disminuidos (leucope-
nia). En la Figura 3.3 se muestran los subtipos de leucocitos y los porcentajes normalmente
encontrados en un Recuento Diferencial segun [Oppenheim, 1998].
Los neutrofilos, monocitos y eosinofilos poseen propiedades fagocitarias5 que consti-
tuyen un mecanismo de defensa antibacteriana y una contribucion para la eliminacion de
desechos. Los linfocitos son productores de anticuerpos, mientras que los basofilos poseen
4son un tipo de proteınas producidas por el sistema inmune en respuesta a la presencia de sustanciasextranas potencialmente daninas que pueda ser una amenaza para el organismo: como quımicos, partıculasde virus, esporas (cuerpos microscopicos unicelulares o pluricelulares que por division propia dan nacimientoa nuevos organismos en vegetales criptogamos, hongos y algunas especies protozoarias.) o toxinas (proteınaso lipopolisacaridos que causan danos concretos a un huesped) de las bacterias [Webner, 2006].
5propiedad de una celula para atraer partıculas y destruirlas o digerirlas.

14 3 FUNDAMENTOS
Figura 3.3: Porcentajes normales en un Recuento Diferencial.
3.1 Conceptos biologicos 15
granulos de heparina e histamina6.
En las infecciones, cuadros toxicos y hemorragias se produce una respuesta leucocitaria
en la sangre, de acuerdo con la intensidad del estımulo y la capacidad de reaccion del
individuo. Las primeras celulas que aumentan en numero ante un cuadro infeccioso son los
neutrofilos, mientras los monocitos y linfocitos aumentan en etapas posteriores. En ejerci-
cios muy forzados o embarazo puede haber una moderada leucocitosis7 fisiologica, no rela-
cionada con procesos patologicos. En la Figura 3.4, tomada de [Freggiaro and Espejo, 2006]
se muestran imagenes de los tipos de leucocitos mas comunes.
3.1.2. Recuento Diferencial
Metodo manual
El Recuento Diferencial consiste en examinar la morfologıa de globulos blancos, ası como
su tamano y numero [Oppenheim, 1998]. El metodo para la preparacion de la muestra em-
pleada para hacer un Recuento Diferencial es el siguiente:
Preparacion del frotis sanguıneo. Se coloca una gota de sangre fresca sobre un por-
taobjetos y se extiende con ayuda de otro portaobjetos para formar una capa delgada
que se deja secar, como se observa en la Figura 3.5.
Tincion. Se realiza con colorantes acidos (eosina-rojo) y basicos (azul de metileno). Los
Leucocitos (globulos blancos) se tinen de color azul, pues reaccionan quımicamente
con el azul de metileno tomando dicha coloracion. Los Eritrocitos (globulos rojos)
se tinen de color rojo, ya que reaccionan quımicamente con la eosina pintandose de
rojo. Los globulos blancos con granulos que toman ambos colorantes se denominan
neutrofilos. Las celulas con granulos que toman color azul se llaman basofilos. Los
leucocitos que poseen granulos que se tinen con eosina (rojo) se denominan eosinofi-
los. Una vez tenidos los leucocitos, se identifican por sus caracterısticas y grado de
desarrollo.
6mediadores quımicos que modulan los procesos de la inflamacion.7aumento en el numero de leucocitos.

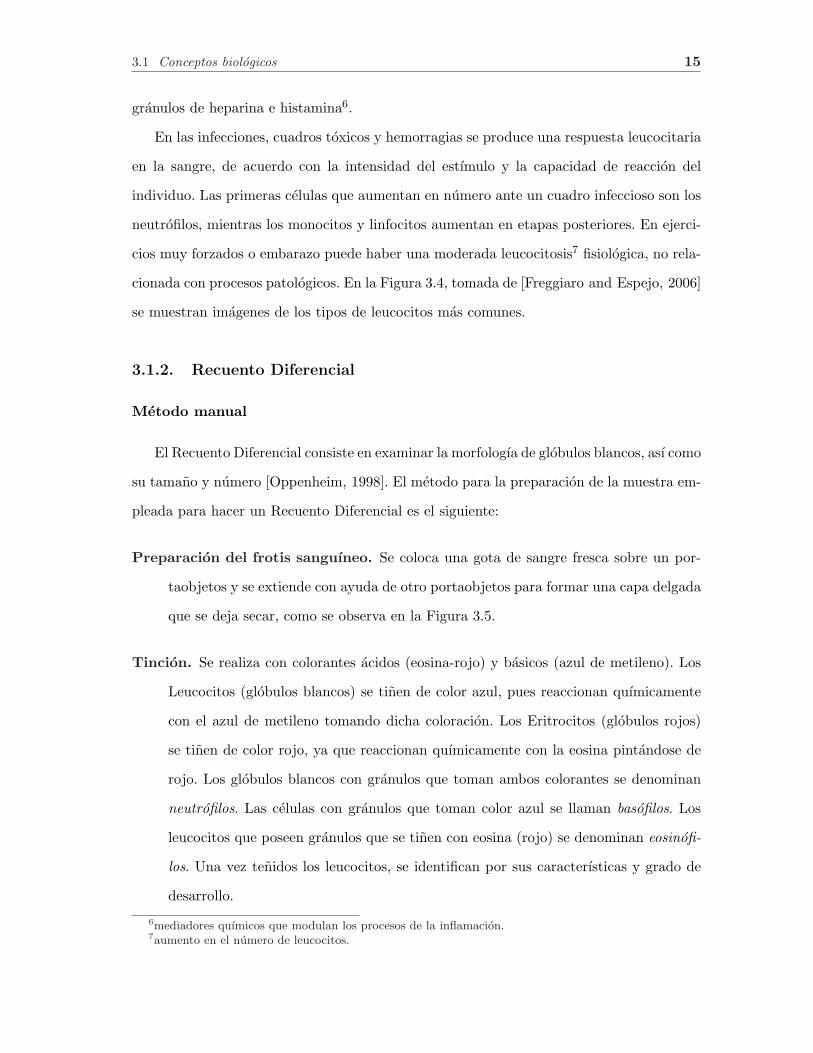
16 3 FUNDAMENTOS
Tipo de célula Imagen de un Atlas de
Hematología(aumento:400 veces)
Características
NEUTRÓFILO
1. Neutrófilo en banda
2. Neutrófilo segmentado
3. Eritrocito
4. Neutrófilo en segmentación
De acuerdo a la forma de su núcleo se les
puede clasificar en neutrófilos en banda o
cayados y en neutrófilos segmentados.
Presentan núcleos divididos en 3 a 5 lóbulos.
EOSINÓFILO
Núcleo en forma de anteojo y gránulos
gruesos en el citoplasma.
BASÓFILO
Posee un núcleo en forma de lóbulos difícil
de distinguir a causa de los gránulos gruesos
y obscuros del citoplasma.
LINFOCITO
Núcleo redondo y grande.
El borde del citoplasma celular es
ligeramente azulado y bien definido.
MONOCITO
Células fagocíticas con gran capacidad
bactericida.
Por la fagocitosis aumentan de tamaño.
Figura 3.4: Tipos de leucocitos y sus caracterısticas.
Figura 3.5: Preparacion de frotis sanguıneo.

3.1 Conceptos biologicos 17
Figura 3.6: Observacion y conteo de leucocitos.
Reporte. Se cuentan en una muestra vista al microscopio optico alrededor de 100 celulas
para expresar los resultados a manera de porcentaje. En el lado izquierdo de la figura
3.6 se muestra un aparato similar a una maquina de escribir que utiliza el quımico
para realizar el conteo mientras observa al microscopio.
Los colorantes utilizados en el metodo de tincion descrito anteriormente se utilizan en la
mayorıa de los laboratorios clınicos en Mexico y son los que se utilizaron en este trabajo
de tesis. De acuerdo a las imagenes consultadas en diversas fuentes se puede notar que
la coloracion que adquieren los leucocitos es muy similiar al ser tenidos para Recuento
Diferencial, lo cual significa que es posible utilizar distintos colorantes para la tincion de
los frotis sin afectar de forma considerable la coloracion que comunmente adquieren para
ser diferenciados.
Metodo automatico
No existe un metodo unico para contar celulas, lo cual implica que hay en el mercado
varios modelos de contadores hematologicos y cada uno de ellos realiza su funcion de una
forma especıfica; sin embargo, los parametros que miden y los resultados de sus medicio-
nes son muy similares. Como ejemplo para este estudio, se han escogido los contadores
Beckman Coulter8 por su sencillez y uso extendido; sin querer decir con ello que sean los
mejores o los unicos modelos existente para este proposito9.
Un contador hematologico debe contar, como mınimo, la serie blanca (globulos blancos)
y la serie roja (globulos rojos). Es decir, el total de leucocitos y el total de eritrocitos, sin
8empresa lıder en el comercio de equipo de laboratorio y contadores hematologicos.9En los laboratorios de SESA en Tlaxcala se utilizan el sistema K-1000 [Ses, 1999].

18 3 FUNDAMENTOS
hacer distincion entre las poblaciones de celulas que componen a cada una de las series.
A esto se le llama CBC –Complete Blood Count–. Aparte de esta cuenta, un contador
hematologico tambien debe proporcionarnos la cuenta de toda la serie blanca; es decir,
diferenciacion entre los componentes de la poblacion blanca. Esto es lo que se llama el
White Blood Differential (Modo Diff, Recuento Diferencial).
La tecnologıa VCS (Volumen, Conductividad y dispersion) es el mecanismo por el cual
los analizadores de hematologıa COULTER realizan la diferenciacion de leucocitos en 5
tipos: Neutrofilos, Linfocitos, Monocitos, Eosinofilos y Basofilos [Galenica, 2005].
Principios del metodo:
La muestra de sangre es mezclada con el reactivo Erythrolyse (contenido en el reactivo
Scatter Pack), lo cual produce una rapida lisis10 de los eritrocitos y reduce los restos
celulares sin alterar los leucocitos. Posterior a esta reaccion se agrega el reactivo StabiLyse,
el cual actua como preservante11 de los leucocitos a fin de que resistan en su estado casi
nativo las mediciones subsecuentes –Volumen, Conductividad y Dispersion–.
Una vez tratada la muestra es dirigida a una celda de flujo en la cual por el diseno
hidrodinamico, los leucocitos se alinean y pasan formados uno a uno y en donde se realizan
las siguientes mediciones:
El volumen celular se obtiene mediante la impedancia de baja frecuencia que pre-
senta al paso de la corriente continua.
La conductividad al aplicar radiofrecuencia12, que da informacion sobre la densidad
celular.
La dispersion al hacer incidir sobre la celula una luz laser, lo que proporciona
informacion sobre estructura y forma de la celula.
De esta manera son realizadas las 3 determinaciones de manera simultanea. Las lecturas de
estas 3 senales analogas son enviadas al analizador para su amplificacion y proceso, luego el10rompimiento o destruccion de las celulas.11sustancia que actua como conservador o protector de los leucocitos.12porcion del espectro electromagnetico que se obtiene al aplicar corriente alterna a una antena
[Wikipedia Foundation, 2006].
3.2 Conceptos Estadısticos 19
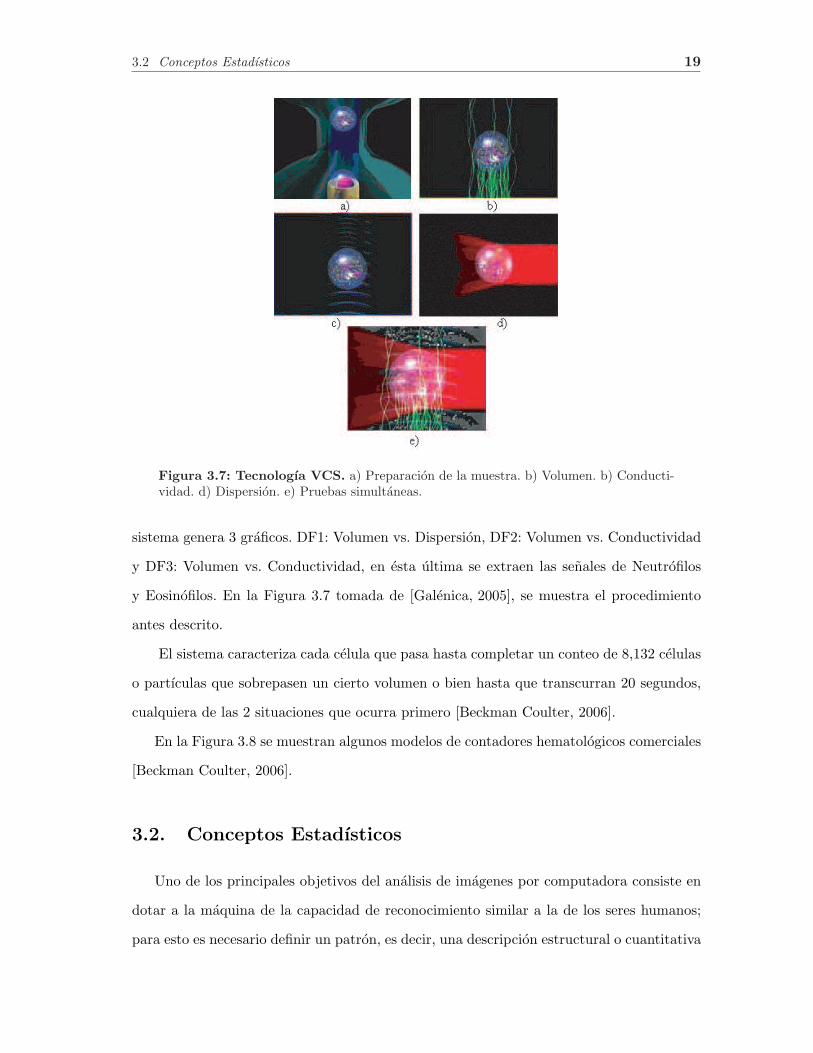
Figura 3.7: Tecnologıa VCS. a) Preparacion de la muestra. b) Volumen. b) Conducti-vidad. d) Dispersion. e) Pruebas simultaneas.
sistema genera 3 graficos. DF1: Volumen vs. Dispersion, DF2: Volumen vs. Conductividad
y DF3: Volumen vs. Conductividad, en esta ultima se extraen las senales de Neutrofilos
y Eosinofilos. En la Figura 3.7 tomada de [Galenica, 2005], se muestra el procedimiento
antes descrito.
El sistema caracteriza cada celula que pasa hasta completar un conteo de 8,132 celulas
o partıculas que sobrepasen un cierto volumen o bien hasta que transcurran 20 segundos,
cualquiera de las 2 situaciones que ocurra primero [Beckman Coulter, 2006].
En la Figura 3.8 se muestran algunos modelos de contadores hematologicos comerciales
[Beckman Coulter, 2006].
3.2. Conceptos Estadısticos
Uno de los principales objetivos del analisis de imagenes por computadora consiste en
dotar a la maquina de la capacidad de reconocimiento similar a la de los seres humanos;
para esto es necesario definir un patron, es decir, una descripcion estructural o cuantitativa

20 3 FUNDAMENTOS
Figura 3.8: Contadores Hematologicos.
de un objeto o de alguna otra entidad de interes en una imagen. Las representaciones de
patrones utilizadas con mas frecuencia son vectores para descripciones cuantitativas, y
cadenas o arboles para descripciones estructurales [Hair et al., 2001].
Dado que el metodo de solucion a la problematica planteada en esta investigacion
se relaciona con el analisis estadıstico de la informacion objeto de este estudio, resulta
imperativo definir algunos conceptos basicos.
Definicion 1 (Individuos o elementos) Personas u objetos que contienen cierta infor-
macion que se desea estudiar [Hair et al., 2001].
Definicion 2 (Poblacion) Conjunto de individuos o elementos que cumplen ciertas pro-
piedades comunes [Hair et al., 2001].
Definicion 3 (Muestra) Subconjunto representativo de una poblacion [Hair et al., 2001].
Definicion 4 (Caracterıstica) Propiedad, rasgo o cualidad de los elementos de la po-
blacion. Las caracterısticas pueden ser cualitativas y cuantitativas [Hair et al., 2001].
Definicion 5 (Varianza) Mide cuanto varıa una variable X respecto a un valor esperado.
Si µ ≡ E[X], la varianza se define como:
var(X) = E[(X − µ)2] = E[X2]− µ2 (3.1)
La varianza se denota por σ2 [Alpaydm, 2004].

3.2 Conceptos Estadısticos 21
Definicion 6 (Desviacion estandar) Se denota por σ. La desviacion estandar tiene la
misma unidad que X [Alpaydm, 2004]. Se define como:
σ =√
var(X) (3.2)
Definicion 7 (Covarianza) Indica la relacion entre dos variables aleatorias. Si la ocu-
rrencia de X hace mas probable la ocurrencia de Y , la covarianza es positiva; es negativa
si las ocurrencias de X hacen menos probable las ocurrencias de Y y es 0 si no hay depen-
dencia [Alpaydm, 2004].
cov(X,Y ) = E[(X − µX)(Y − µY )] = E[XY ]− µXµY (3.3)
Algunas de sus propiedades son:
cov(X, Y ) = cov(Y, X) (3.4)
cov(X, X) = var(X) (3.5)
Definicion 8 (Media o valor esperado) Es el valor promedio de X en un amplio nume-
ro de experimentos. Se denota por E[X] o µ [Alpaydm, 2004].
Considerando una observacion s, un vector caracterıstico x y una clase wi, se definen los
siguientes conceptos:
Funcion de masa de probabilidad discreta, FMP: P (wi)
∑
i
P (wi) = 1 (3.6)
Funcion de densidad de probabilidad continua, FDP: p(x)
∫p(x)dx = 1 (3.7)
22 3 FUNDAMENTOS
Valor esperado: E(x)
E(x) =∫
xp(x)dx (3.8)
Entre las funciones de densidad de probabilidad –FDP–, la funcion de densidad normal
o gaussiana es la mas utilizada debido a las propiedades que presenta y es util en situaciones,
en las cuales un conjunto de patrones de una determinada clase toman valores en un rango
contınuo y alrededor de un patron promedio, es decir, considera que los patrones de clases
diferentes tienen ciertos valores, pero los valores de una clase son lo mas parecidos posible.
Algunas propiedades de la Distribucion Normal son:
Parametros que especifican la distribucion. La funcion de densidad normal queda
completamente especificada por pocos parametros. En el caso unidimensional: la
media y la varianza. En el caso multidimensional, el vector medio y la matriz de
covarianza.
Incorrelacion e independencia. Dado un conjunto de patrones que siguen una distri-
bucion normal, si las variables asociadas estan incorrelacionadas, entonces son inde-
pendientes.
Justificacion fısica. La suposicion de normalidad es una aproximacion razonable para la
mayor parte de los datos tomados de la Naturaleza. Lo cual es cierto, en particular,
para variables aleatorias que son suma de otras variables y el teorema central del
lımite13 puede aplicarse [Cortijo, 2001].
Cuando se analiza la distribucion de mas de una variable, se denomina distribucion normal
multidimensional, y se expresa como:
p(x) =1
(2π)d2 |∑ | 12
e−12
(x−µ)tΣ−1(x−µ) ∼ N(µ,∑
) (3.9)
donde,13el teorema dice que cuando se tiene un grupo numeroso de variables independientes y todas ellas siguen
el mismo modelo de distribucion (cualquiera que este sea), la suma de todas ellas se distribuye segun unadistribucion normal [Garcıa and Sierra, 2001].

3.2 Conceptos Estadısticos 23
d =, numero de dimensiones.
x = {x1, ..., xd}, vector de entrada.
µ = E(x) = {µ1, ..., µd}, vector de medias.∑
= E((x− µ)(x− µ)t), matriz de covarianza con elementos σij ,inverso∑−1, y determi-
nante |∑ |σij = σji = E((xi − µi)(xj − µj)) = E(xixj)− µiµj
Algunas propiedades de las distribuciones gaussianas multidimensionales son:
Si las dimensiones ith y jth son estadısticamente o linealmente independientes, en-
tonces
E(xixj) = E(xi)E(xj) y σij = 0 (3.10)
Si todas las dimensiones son estadısticamente o linealmente independientes, entonces
σij = 0, ∀i 6= j, y la matriz de covarianza∑
posee elementos diferentes de cero en la
diagonal.
Si la densidad subyacente es gaussiana y∑
es una matriz diagonal, entonces las
dimensiones son estadısticamente independientes, y
p(x) =d∏
i=1
p(xi) , p(xi) ∼ N(µi, σii) y σii = σ2i (3.11)
3.2.1. Metricas de similitud
Distancia de Mahalanobis
Si un conjunto de patrones siguen una distribucion normal, tienden a representarse
formando un unico agrupamiento de manera que el centro de este agrupamiento esta de-
terminado por el vector medio, y la forma por la matriz de covarianza. En la Figura 3.9 se
muestra la funcion de densidad de probabilidad para una clase cuyos patrones siguen una
distribucion normal.
De la ecuacion 3.9 se deduce que los puntos para los cuales el valor de la densi-
dad de probabilidad constante estan situados en hiperelipsoides cuya forma cuadratica

24 3 FUNDAMENTOS
Figura 3.9: Grafica representativa de una Distribucion Gaussiana
Figura 3.10: Proyeccion sobre el plano definido por las variables X1 y X2
(x− µ)T∑−1(x− µ) es constante. El valor de esta expresion es la Distancia de Maha-
lanobis de x a µ.
En el caso bidimensional, estas elipses pueden verse claramente en la Figura 3.10, donde
los contornos de igual densidad de probabilidad son hiperelipsoides con una distancia de
Mahalanobis a µ constante [Cortijo, 2001]. Las direcciones de los ejes principales de estos
hiperelipsoides estan determinadas por los autovectores14 de∑
y sus longitudes por los
autovalores15 correspondientes.
La utilidad de la Distancia de Mahalanobis como medida de similitud radica en que
es una forma de determinar la similitud entre dos variables aleatorias multidimensionales,
se diferencia con la distancia euclıdea en que considera la correlacion entre las variables
14tambien llamados eigenvectores, son vectores no nulos que al ser transformados por un operador danlugar a un multiplo escalar de sı mismos λ, con lo que no cambian su direccion [Wikipedia Foundation, 2006].
15tambien llamados eigenvalores, son los escalares λ obtenidos por un eigenvector[Wikipedia Foundation, 2006].

3.2 Conceptos Estadısticos 25
aleatorias. Algunas propiedades importantes que cumple la distancia de Mahalanobis para
ser una distancia son [Hair et al., 2001]:
Semipositividad. La distancia entre dos puntos de las mismas coordenadas es cero,
y si tienen coordenadas distintas es positiva, pero nunca negativa.
Simetricidad. La distancia entre los puntos a y b es la misma que entre los puntos
b y a.
Desigualdad triangular. d(a, b) ≤ d(a, c)∀a, b, cεX
3.2.2. Analisis de Componentes Principales –PCA–
Tambien conocido en algunas areas como transformada discreta de Karhunen-Loeve o
transformada de Hotelling. Es un metodo no supervisado que no utiliza la informacion de
salida, cuyo criterio mas importante es la varianza [Alpaydm, 2004].
Esta tecnica estadıstica transforma linealmente un conjunto de variables en un con-
junto sustancialmente pequeno de variables no correlacionadas, que representan la mayor
cantidad de informacion del conjunto de datos original, es decir reduce la dimension de un
conjunto de n variables a un conjunto m variables, que estan altamente correlacionadas.
Un conjunto mucho mas pequeno de variables no correlacionadas es mucho mas facil
de entender o procesar en analisis posteriores –por ejemplo con metricas– que el conjunto
grande –original– de variables correlacionadas [Solano, 2002].
PCA se fundamenta en el hallazgo de factores –componentes principales– que sucesi-
vamente demuestren la mayor parte de la varianza total. La tecnica consisten en:
1. Detectar vectores no correlacionados, llamados componentes principales.
2. Ordenar los componentes principales considerando primero a aquellos con desviacion
mas alta, dejando al final los que poseen las desviaciones mas bajas.
3. Eliminar a los componentes principales que contribuyen menos en la variacion en el
conjunto de datos.

26 3 FUNDAMENTOS
De esta manera, el primer factor o componente es el que contiene una mayor parte de la
varianza, el segundo es el que tiene la mayor parte de la varianza restante y ası sucesiva-
mente.
Reducir el conjunto de datos facilita el proceso del clasificador, ahorra tiempo de pro-
cesamiento y reduce la demanda en los recursos de computo [Reyes, 2005].
De acuerdo al trabajo realizado por Alejandro Guzman en [Guzman, 2002], el uso de
PCA como metodo para segmentar imagenes tiene algunas ventajas como las siguientes:
Una mejor representacion del espacio de representacion de color, simplificando la
clasificacion.
Una posible reduccion de dimensiones fısicas del espacio de representacion de color
(3D, 2D o 1D).
Sintetizar informacion util sobre la imagen y crear nuevos parametros para el analisis
de la imagen.
Respecto a otras tecnicas, PCA es mas simple de implementar.
Considerando las ventajas de esta tecnica es posible la implementacion de una segmentacion
semi-automatica debido a su transformacion lineal, ya que manipula la informacion sin
distorsionarla [Guzman, 2002].
3.3. Analisis de imagenes
Las funciones necesarias en un sistema de vision son [Awcock and R., 1996]:
Una escena bajo condiciones controladas.
Captura de una imagen.
Analisis de la imagen.
Reconocimiento de ciertos objetos dentro de ella.
3.3 Analisis de imagenes 27
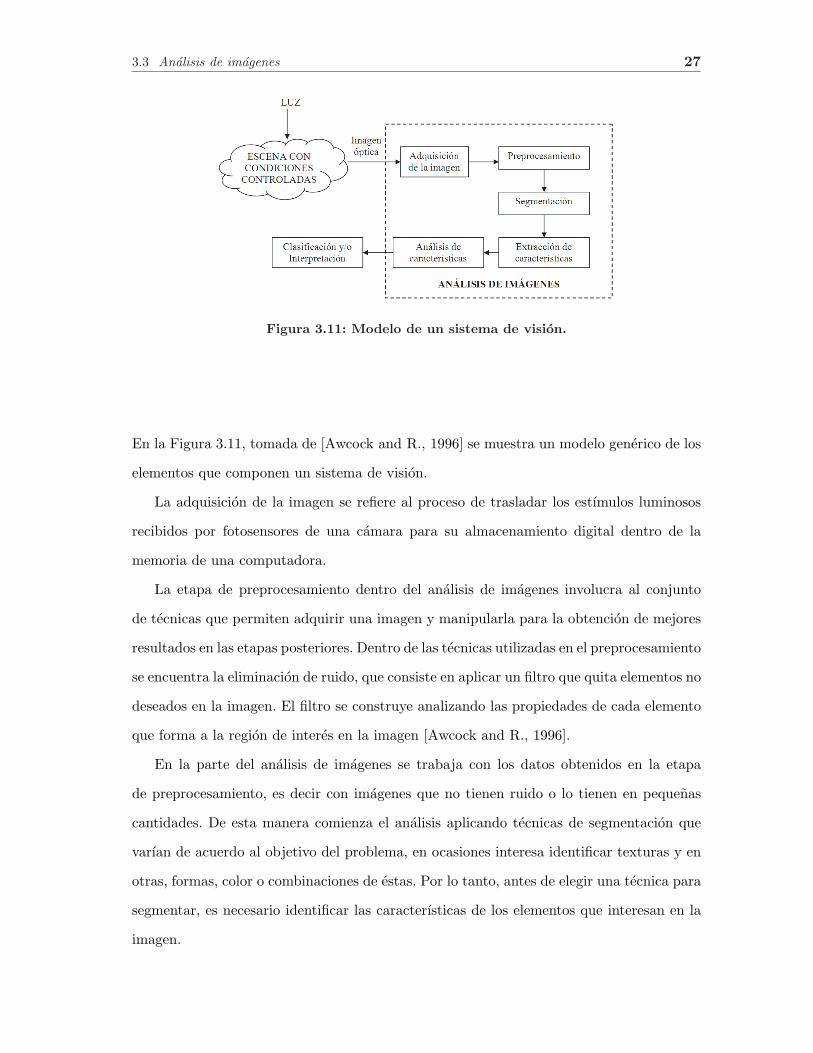
Figura 3.11: Modelo de un sistema de vision.
En la Figura 3.11, tomada de [Awcock and R., 1996] se muestra un modelo generico de los
elementos que componen un sistema de vision.
La adquisicion de la imagen se refiere al proceso de trasladar los estımulos luminosos
recibidos por fotosensores de una camara para su almacenamiento digital dentro de la
memoria de una computadora.
La etapa de preprocesamiento dentro del analisis de imagenes involucra al conjunto
de tecnicas que permiten adquirir una imagen y manipularla para la obtencion de mejores
resultados en las etapas posteriores. Dentro de las tecnicas utilizadas en el preprocesamiento
se encuentra la eliminacion de ruido, que consiste en aplicar un filtro que quita elementos no
deseados en la imagen. El filtro se construye analizando las propiedades de cada elemento
que forma a la region de interes en la imagen [Awcock and R., 1996].
En la parte del analisis de imagenes se trabaja con los datos obtenidos en la etapa
de preprocesamiento, es decir con imagenes que no tienen ruido o lo tienen en pequenas
cantidades. De esta manera comienza el analisis aplicando tecnicas de segmentacion que
varıan de acuerdo al objetivo del problema, en ocasiones interesa identificar texturas y en
otras, formas, color o combinaciones de estas. Por lo tanto, antes de elegir una tecnica para
segmentar, es necesario identificar las caracterısticas de los elementos que interesan en la
imagen.

28 3 FUNDAMENTOS
3.3.1. Segmentacion
La segmentacion consiste en dividir una imagen en regiones o partes que la constituyen,
y se basa en tres propiedades [de la Escalera, 2001]:
Similitud. Cada uno de los pixeles de un elemento tiene valores parecidos para alguna
propiedad.
Discontinuidad. Los objetos destacan del entorno y tienen por lo tanto bordes definidos.
Conectividad. Los pixeles pertenecientes al mismo objeto son contiguos (estan agrupa-
dos).
Las tecnicas que se utilizan para lograr la segmentacion se basan en la busqueda de partes
uniformes en la imagen, o bien de partes en las que se produce algun cambio. Ası, una vez
detectados los puntos que presentan estas discontinuidades o bordes se debe encontrar un
camino entre el pixel P1 y el pixel Pn, lo que permite definir un camino como una secuencia
de puntos P2, P3, ..., Pn − 1, donde el pixel Pi+1 es vecino del pixel Pi. Una region es un
camino entre cualquier pareja de sus puntos, y todos los pixeles del camino pertenecen
a la region. De esta manera, como producto de la segmentacion se tiene un conjunto de
regiones:
Ri Son las regiones que no tocan los bordes de la imagen.
R Es el conjunto union de todas las regiones Ri.
Rc Es el conjunto complemento de R.
Esto permite definir:
Fondo. Puntos que pertenecen a Rc y son contiguos a los bordes de la imagen
Agujeros. Puntos que pertenecen a Rc y no son contiguos a los bordes de la imagen.
Al segmentar generalmente se obtienen los datos de pixel en bruto que forman parte de
una region o de su contorno y el siguiente paso es decidir si los datos de interes pertenecen

3.3 Analisis de imagenes 29
al contorno, a la region o a ambos. No obstante, el exito en el uso de cualquier tecni-
ca empleada en la etapa de segmentacion de imagenes de muestras biologicas siempre se
vera afectada por factores como la calidad en la preparacion de dicha muestra, de la cual
se tomara la imagen a analizar.
Otro factor importante a considerar en la segmentacion, es el conjunto de condiciones
requeridas para la adquisicion de la imagen, incluyendo cambios en la iluminacion y niveles
de acercamiento para la captura de la imagen, entre otros.
En las imagenes a color, un pixel esta constituıdo a partir de la combinacion de al
menos 3 componentes (RGB). Existen diferentes formas de representacion espacial para
un mismo color [Guzman, 2002].
Realizar un estudio como el que se describe en [Guzman, 1997] permite elegir el espacio
de color mas apropiado para llevar a cabo la segmentacion basada en color.
Existen muchas tecnicas de segmentacion [Pal and Pal, 1993] y respecto a la segmen-
tacion en color se pueden distinguir dos grandes grupos:
Aquellas que trabajan directamente sobre el espacio imagen. Este conjunto de tecnicas
se puede dividir en dos grandes sub-grupos que engloban la mayor parte de tecnicas
utilizadas hasta antes del desarrollo de las herramientas propias a la inteligencia
artificial; la segmentacion por crecimiento de regiones y la deteccion de contornos. La
primera utiliza un criterio de homogeneidad como parametro para eliminar la region.
Mientras que la segmentacion por deteccion de contornos busca fuertes variaciones
de algun parametro dentro de la imagen utilizando operadores diferenciales16. En
[Flores, 2001] se muestra un ejemplo de segmentacion por regiones.
Aquellas que trabajan sobre el espacio de representacion de color. Se fundamentan en
la teorıa de analisis de datos para hacer la clasificacion. Entre las tecnicas utiles para
hacer este analisis se encuentra el analisis de componentes principales –PCA–. En la
seccion 3.2.2 se describieron algunas ventajas de esta tecnica para la segmentacion.
16operadores relacionados con el calculo de derivadas e integrales.

30 3 FUNDAMENTOS
3.3.2. Filtrado espacial
El filtrado espacial, tambien llamado suavizacion consiste en el uso de mascaras espa-
ciales para el procesamiento de las imagenes, y las mascaras se denominan filtros espaciales.
Los filtros suavizantes se utilizan para hacer que la imagen aparezca algo borrosa y para
reducir el ruido favoreciendo la eliminacion de pequenos detalles de una imagen antes de
la extraccion de un objeto (grande) y/o permitiendo el relleno de pequenos espacios entre
lıneas o curvas [Gonzalez and Woods, 1996]. A continuacion se describe el filtro de la me-
diana, dado que se hace uso de este durante la ultima etapa de la segmentacion descrita
en la seccion 6.1.2.
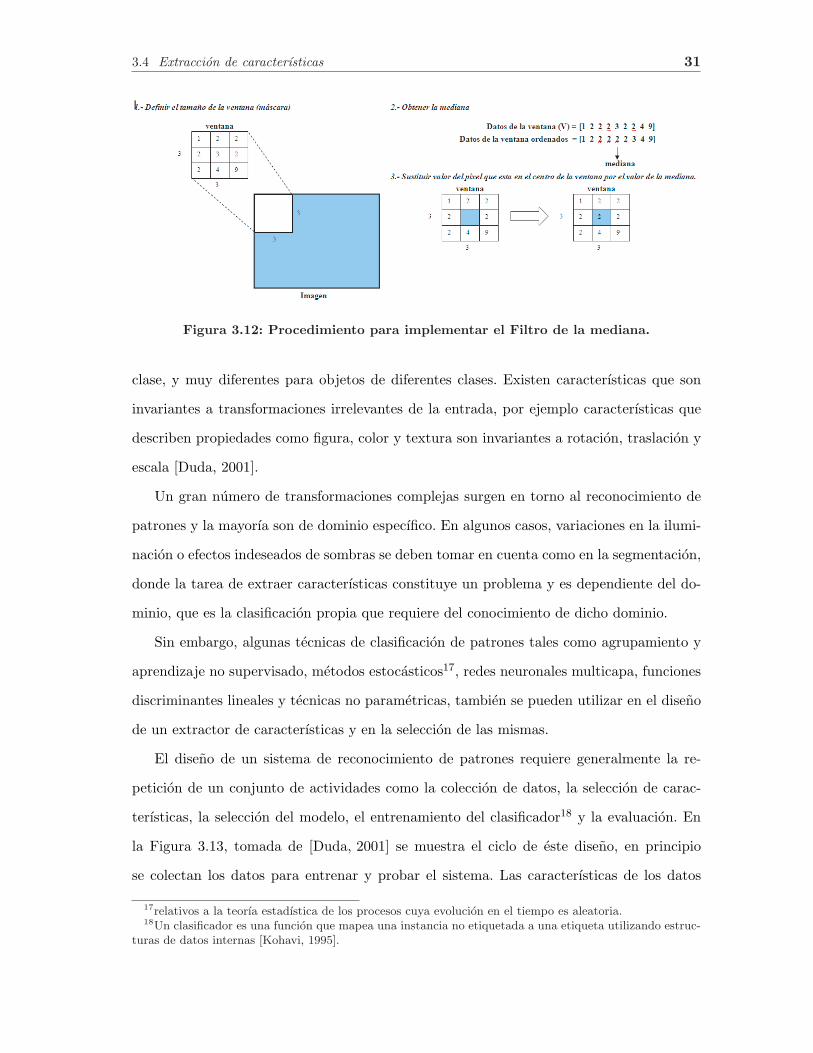
Filtro de la mediana
Consiste en reemplazar el nivel de gris por la mediana de los niveles de gris en un entorno
de este pixel. Es un metodo efectivo cuando la caracterıstica que se desea preservar es la
agudeza de los bordes.
La mediana m de un conjunto de valores es tal que la mitad de los valores del conjunto
quedan por debajo de m y la otra mitad por encima. Por ejemplo, para realizar el filtrado
por la mediana en el entorno de un pixel, primero se deben extraer los valores del pixel y
de su entorno, determinar la mediana y asignar este valor al pixel. En la Figura 3.12 se
muestra este procedimiento. Los tres pasos mostrados en dicha figura se repiten mientras
se realiza un recorrido por toda la imagen.
La funcion del filtrado es introducir puntos con intensidades distintas que sean mas
parecidos a sus vecinos, eliminando los estrechos picos de intensidad que aparecen aislados
en el area cubierta por la mascara de filtrado.
3.4. Extraccion de caracterısticas
El objetivo principal de un extractor de caracterısticas es describir un objeto para su
reconocimiento por medidas cuyos valores son muy similares para objetos de la misma
3.4 Extraccion de caracterısticas 31
Figura 3.12: Procedimiento para implementar el Filtro de la mediana.
clase, y muy diferentes para objetos de diferentes clases. Existen caracterısticas que son
invariantes a transformaciones irrelevantes de la entrada, por ejemplo caracterısticas que
describen propiedades como figura, color y textura son invariantes a rotacion, traslacion y
escala [Duda, 2001].
Un gran numero de transformaciones complejas surgen en torno al reconocimiento de
patrones y la mayorıa son de dominio especıfico. En algunos casos, variaciones en la ilumi-
nacion o efectos indeseados de sombras se deben tomar en cuenta como en la segmentacion,
donde la tarea de extraer caracterısticas constituye un problema y es dependiente del do-
minio, que es la clasificacion propia que requiere del conocimiento de dicho dominio.
Sin embargo, algunas tecnicas de clasificacion de patrones tales como agrupamiento y
aprendizaje no supervisado, metodos estocasticos17, redes neuronales multicapa, funciones
discriminantes lineales y tecnicas no parametricas, tambien se pueden utilizar en el diseno
de un extractor de caracterısticas y en la seleccion de las mismas.
El diseno de un sistema de reconocimiento de patrones requiere generalmente la re-
peticion de un conjunto de actividades como la coleccion de datos, la seleccion de carac-
terısticas, la seleccion del modelo, el entrenamiento del clasificador18 y la evaluacion. En
la Figura 3.13, tomada de [Duda, 2001] se muestra el ciclo de este diseno, en principio
se colectan los datos para entrenar y probar el sistema. Las caracterısticas de los datos
17relativos a la teorıa estadıstica de los procesos cuya evolucion en el tiempo es aleatoria.18Un clasificador es una funcion que mapea una instancia no etiquetada a una etiqueta utilizando estruc-
turas de datos internas [Kohavi, 1995].
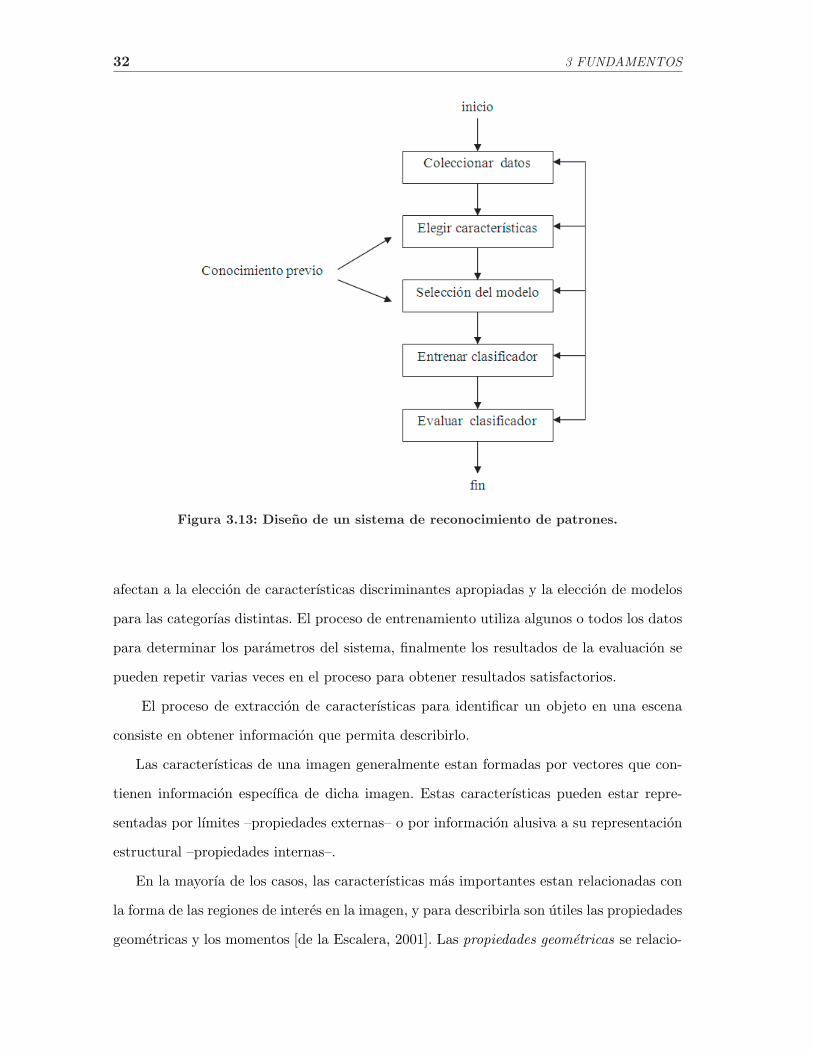
32 3 FUNDAMENTOS
Figura 3.13: Diseno de un sistema de reconocimiento de patrones.
afectan a la eleccion de caracterısticas discriminantes apropiadas y la eleccion de modelos
para las categorıas distintas. El proceso de entrenamiento utiliza algunos o todos los datos
para determinar los parametros del sistema, finalmente los resultados de la evaluacion se
pueden repetir varias veces en el proceso para obtener resultados satisfactorios.
El proceso de extraccion de caracterısticas para identificar un objeto en una escena
consiste en obtener informacion que permita describirlo.
Las caracterısticas de una imagen generalmente estan formadas por vectores que con-
tienen informacion especıfica de dicha imagen. Estas caracterısticas pueden estar repre-
sentadas por lımites –propiedades externas– o por informacion alusiva a su representacion
estructural –propiedades internas–.
En la mayorıa de los casos, las caracterısticas mas importantes estan relacionadas con
la forma de las regiones de interes en la imagen, y para describirla son utiles las propiedades
geometricas y los momentos [de la Escalera, 2001]. Las propiedades geometricas se relacio-

3.4 Extraccion de caracterısticas 33
Figura 3.14: Caracterısticas morfologicas de una region.
nan con medidas de la region de interes, mientras que los momentos permiten obtener pro-
piedades de un objeto en terminos de su area, posicion y orientacion [Awcock and R., 1996],
tales como la excentricidad, orientacion y centro de masa.
Las caracterısticas morfologicas deben ser invariantes a traslacion, rotacion y escala.
En la Figura 3.14 se muestran algunas caracterısticas utiles para describir la forma de una
region.
Para describir un momento se considera la imagen de la Figura 3.15, donde la parte
izquierda representa un segmento de borde y la derecha muestra el segmento representado
como una funcion 1-D g(r) de una variable arbitraria r. Tratando la amplitud de g como
una variable aleatoria v y formando un histograma de amplitud p(vi), i = 1, 2, ..., k, siendo
k el numero de incrementos de amplitud discretos. Entonces el momento n-esimo de v
respecto de su media es [Gonzalez and Woods, 1996]:
µn(v) =k∑
i=1
(vi −m)np(vi) (3.1)
donde,

34 3 FUNDAMENTOS
Figura 3.15: Momentos.
m =k∑
i=1
vip(vi) (3.2)
La cantidad m es el valor medio de v y µ2 su varianza19. Generalmente solo se requieren
los primeros momentos para diferenciar formas claramente distintas.
Otra alternativa consiste en normalizar g(r) para que el area bajo ella sea la unidad y
tratarla como un histograma. En este caso, r es la variable aleatoria y los momentos son,
µn(v) =L∑
i=1
(ri −m)ng(ri) (3.3)
donde,
m =L∑
i=1
rig(ri) (3.4)
En esta notacion, L es el numero de puntos en el borde y µn(r) esta relacionado directa-
mente con la forma de g(r). Por ejemplo, el segundo momento µ2(r) mide la dispersion de
los puntos de la curva con relacion al valor medio de r, y el tercer momento µ3(r) mide su
simetrıa con relacion a la media.
En la tabla 3.1 se describen algunas caracterısticas utiles para la descripcion de la for-
ma de la region. El centro de masa en un tratamiento de sistemas de masas puntuales es
19El subındice 2 de µ, indica que se trata del segundo momento.

3.4 Extraccion de caracterısticas 35
PROPIEDAD DESCRIPCION
Area Numero de pixeles que contiene la imagen
Longitud de eje menorLongitud (en pixeles) del eje menor de la elipse que tiene losmismos segundos momentos que la region
Longitud de eje mayorLongitud (en pixeles) del eje mayor de la elipse que tiene losmismos segundos momentos que la region
Caja circunscrita(Bounding Box )
Rectangulo mas pequeno que puede contener la region
Envoltura convexa(Convex Hull)
Polıgono convexo mas pequeno que puede conte-ner la region. En la Figura 3.18, modificada de[Goodrich and Tamassia, 2003] se presenta un ejemplo.
Numero de Euler
Numero de componentes conexas de la region menos numerode huecos en dicha region. En la Figura 3.17 se muestra unejemplo.
Diametro equivalenteDiametro del cırculo con la misma area que la region.D =
√4Area/π
Solidez
Proporcion de pixeles en el convex hull que tambien estanen la region.S = Area/Area de Convex Hull
Rectangularidad (extent)
Proporcion de los pixeles en el bounding box que tambienestan en la region.R = Area/Area de Bounding Box
Signatura (firma)
Grafica que representa la distancia del centro de masa de laregion a los puntos de su borde. En la Figura 3.16, tomadade Gonzalez, De Fu y Lee [1987] se observa un ejemplo.
Perımetro Longitud (en pixeles) del contorno de una region.
Elongacion o razon de aspectoCuadratura del bounding box.S = base Bounding Box/altura de Bounding Box
Excentricidad
Excentricidad de la elipse que tiene los mismos segundosmomentos que la region, es la relacion entre el foco de laelipse y su longitud de eje mayor.
OrientacionAngulo (en grados) entre el eje X y el eje mayor de la elipseque tiene los mismos segundos momentos que la region
Centro de masa (centroide,centro de gravedad)
Es el punto geometrico donde la resultante de las fuerzasgravitatorias ejercidas por todos los cuerpos del sistema seanula. Se obtiene conx =
∑i xi/A, y =
∑i yi/A
donde, A es el area de la region[Pajares and de la Cruz, 2002].
Tabla 3.1: Caracterısticas que permiten describir la forma de una region.

36 3 FUNDAMENTOS
Figura 3.16: Dos curvas de contornos sencillos y sus correspondientes firmasde distancia-angulo. En (a) r(θ) es constante. En (b) r(θ) = A sec(θ).
Figura 3.17: Regiones con numero de Euler -2 y 0, respectivamente.
el punto donde se supone concentrada toda la masa del sistema. El centroide, el centro
de gravedad y el centro de masa pueden, bajo ciertas circunstancias, coincidir entre sı.
En estos casos se suele utilizar los terminos de manera intercambiable, aunque designan
conceptos diferentes.
El centroide es un concepto puramente geometrico mientras que los otros dos terminos
(centro de gravedad y centro de masa) se relacionan con las propiedades fısicas de un cuer-
po. Para que el centroide coincida con el centro de masa, el objeto debe tener densidad
uniforme, o la distribucion de materia a traves del objeto debe tener ciertas propiedades,
tales como simetrıa. Para que un centroide coincida con el centro de gravedad, el centroide
debe coincidir con el centro de masa y el objeto debe estar bajo la influencia de un campo
gravitatorio uniforme [Wikipedia Foundation, 2006].

3.5 Redes Neuronales 37
Figura 3.18: Convex Hull.
3.5. Redes Neuronales
A continuacion se definiran algunos conceptos utilizados a lo largo de esta seccion.
Definicion 9 (Dato) Es un vector formado por valores que representan caracterısticas o
atributos de un objeto cualquiera.
Definicion 10 (Clase) Conjunto de datos que poseen atributos o caracterısticas simila-
res.
Definicion 11 (Patron) Descripcion estructural o cuantitativa de un objeto o de alguna
otra entidad de interes en una imagen.
Definicion 12 (Conjunto de entrenamiento –Patron de entrenamiento–) Patrones
usados por un clasificador (de pertenencia conocida o no a una clase) para estimar parame-
tros de aprendizaje.
Definicion 13 (Conjunto de validacion –Patron de prueba–) Patrones usados por
un clasificador (de pertenencia conocida a una clase) para probar el entrenamiento reali-
zado por un clasificador.
Definicion 14 (Entrenamiento –Aprendizaje–) Proceso de usar un conjunto de en-
trenamiento para obtener funciones de decision.

38 3 FUNDAMENTOS
Figura 3.19: De la neurona biologica a la neurona artificial.
Definicion 15 (Epoca) Un paso completo sobre todos los patrones en el entrenamiento.
[Alpaydm, 2004].
3.5.1. Introduccion
Una red neuronal artificial proporciona un metodo robusto para aproximar funciones
que utilicen valores reales, discretos y funciones valuadas en un vector. El aprendizaje con
redes neuronales artificiales es aplicable a problemas tales como procesamiento de imagenes
y sonido, control y optimizacion, prediccion, entre otros [Acosta et al., ].
El modelo de una neurona artificial es una imitacion del proceso fisiologico de una
neurona biologica. En la figura 3.19 [Acosta et al., ] se muestra un esquema comparativo
de las neuronas biologicas y las artificiales.
De la observacion detallada de este proceso biologico se observan los siguientes analogos
con el sistema artificial:
1. Las entradas Xi.
2. Los pesos Wi.
3. θ, la funcion de umbral que la neurona debe sobrepasar para activarse.
Una neurona artificial es un elemento de calculo no lineal y elemental que se organiza
como red [Gonzalez and Woods, 1996]. Las senales de entrada a una neurona artificial
X1, X2, ..., Xn son variables continuas en lugar de pulsos discretos, como se presenta en una
neurona biologica. Cada senal de entrada pasa a traves de una ganancia o peso, llamado peso
sinaptico (fortaleza) de la conexion cuya funcion es analoga a la de la funcion sinaptica de la

3.5 Redes Neuronales 39
Figura 3.20: Proceso basico de una red neuronal.
neurona biologica. Los pesos pueden ser positivos –excitatorios–, o negativos –inhibitorios–,
el nodo sumatorio acumula todas las senales de entradas multiplicadas por los pesos y las
pasa a la salida a traves de una funcion de transferencia –funcion umbral–. La entrada
neta a cada unidad puede escribirse de la siguiente manera.
netai =n∑
i=1
WiXi =−→X−→Y (3.1)
La secuencia de este proceso se muestra en la figura 3.20 [Acosta et al., ]. Una vez que se
ha calculado la activacion del nodo, el valor de salida equivale a:
xi = fi(netai) (3.2)
Donde fi representa la funcion de activacion para esa unidad, que corresponde a la
funcion escogida para transformar la entrada netai en el valor de salida xi, y que depende
de las caracterısticas especıficas de la red.
Dentro de una red neuronal, las neuronas se encuentran agrupadas por capas, donde
una capa es una coleccion de neuronas que de acuerdo a su ubicacion recibe los siguientes
nombres:
Capa de entrada: Recibe las senales de la entrada de la red.
Capas ocultas: Son capas que no tienen contacto con el medio exterior, sus elementos
pueden tener diferentes conexiones y son estas las que determinan las diferentes

40 3 FUNDAMENTOS
Figura 3.21: Esquema basico de una neurona artificial que contiene una solaentrada.
topologıas de la red.
Capa de salida: Recibe la informacion de la capa oculta y transmite la respuesta al
medio externo.
En la figura 3.21 se muestra una neurona de una entrada [Acosta et al., ].
De esta manera, la topologıa de una red se define por su organizacion o arquitectura
interna, constituıda por capas. Cada capa puede tener diferente numero de neuronas, e
incluso distinta funcion de transferencia. Una funcion de transferencia es una funcion lineal
o no lineal de la salida neta de la red que determina la salida total de la red neuronal.
En la Figura 3.22, tomada de [Acosta et al., ] se muestran las funciones de transferencia
utilizadas frecuentemente con redes neuronales.
3.5.2. Tipos de Redes Neuronales
En general las redes neuronales se pueden clasificar de diversas maneras, segun su
topologıa, forma de aprendizaje (supervisado o no supervisado), tipos de funciones de acti-
vacion, valores de entrada (binarios o continuos). En la figura 3.23 se muestra un esquema
de esta clasificacion [Acosta et al., ]. Sin embargo, de acuerdo al trabajo de [Flores, 2001]
resulta valido considerar que la red ART2 tambien puede recibir entradas continuas.
Las Redes neuronales multicapa alimentadas hacia adelante se utilizan con frecuen-
cia para los problemas de reconocimiento de patrones multiclase, con independencia de
que las clases sean o no separables, y utilizando arquitecturas que constan de niveles de

3.5 Redes Neuronales 41
Figura 3.22: Funciones de transferencia de uso comun.
Figura 3.23: Clasificacion de las redes neuronales.

42 3 FUNDAMENTOS
perceptrones20. En la Figura 3.24 tomada de [Gonzalez and Woods, 1996], se muestra la
arquitectura de este modelo de red neuronal. La imagen ampliada muestra la estructura
basica de cada neurona de la red. El desplazamiento θ se trata como si fuese otro peso.
El numero de neuronas de la primera capa A, es NA, genaralmente NA = n, donde n es
la dimension de los patrones vectoriales que se dan como entrada. El numero de neuronas
en la capa de salida Q se representa por NQ y es igual a M , es decir el numero de clases que
la red es capaz de reconocer. La red reconoce a un patron vectorial x como perteneciente a
una clase wm si la m-esima salida de la red esta activada, mientras que las restantes salidas
estan desactivadas.
Para desarrollar la regla de entrenamiento por retropropagacion es preciso que se pueda
calcular la diferencial de las funciones por todos los caminos de la red, ası que la siguiente
funcion sigmoide de activacion es diferenciable:
hj(Ij) =1
1 + exp[−(Ij + θj)/θ0](3.3)
donde Ij , j = 1, 2, ..., Nj representan la entrada del elemento de activacion de cada nodo de
la capa J de la red, θj es un desplazamiento, y θ0 controla la forma de la funcion sigmoide.
Esta arquitectura consta de numerosas capas de neuronas esructuralmente identicas y
dispuestas de modo que la salida de cada neurona de una determinada capa alimenta las
entradas de todas las neuronas de la siguiente capa. La entrada de un nodo de cualquier
capa es la suma ponderada de las salidas de la capa anterior. Suponiendo que la capa K es
la que precede a la capa J , la entrada del elemento de activacion de cada nodo de la capa
J , representada por Ij es:
Ij =Nk∑
k=1
wjkOk (3.4)
para j = 1, 2, ..., Nj , donde Nj es el numero de nodos de la capa J , NK es el numero de
nodos de la capa K y wjk son los pesos que modifican las salidas Ok de los nodos de la
20un perceptron es una maquina de aprendizaje que al entrenarse utilizando conjuntos de entrenamientolinealmente separables, estos convergen a una solucion en un numero finito de iteraciones. Sus solucionestoman la forma de coeficientes de hiperplanos capaces de separar correctamente las clases representadaspor los patrones del conjunto de entrenamiento [Gonzalez and Woods, 1996].

3.5 Redes Neuronales 43
Figura 3.24: Modelo de red neuronal multicapa alineada hacia adelante (pro-gresiva).
44 3 FUNDAMENTOS
capa K antes de alimentar los nodos de la capa J . Las salidas de la capa K son:
Ok = hk(Ik) (3.5)
para k = 1, 2, ..., Nk. En la ecuacion 3.4 se tiene que Ij , para j = 1, 2, ..., Nj representa la
entrada del elemento de activacion del j-esimo nodo de la capa J , con lo que I1 representa la
entrada del elemento de activacion del primer (el mas alto) nodo de la capa J , I2 representa
la entrada del elemento de activacion del segundo nodo de la capa J , y ası sucesivamente.
Cada nodo de la capa J tiene Nk entradas y cada una se puede ponderar de forma distinta,
las Nk entradas del primer nodo de la capa J estan ponderadas por los coeficientes w1k, k =
1, 2, ..., Nk, y ası sucesivamente. Se requieren en total NJxNk coeficientes para especificar
la ponderacion de los pesos de las salidas de la capa K cuando alimentan a la capa J .
Tambien se requieren NJ coeficientes de desplazamiento θj para especificar completamente
los nodos de la capa J .
Cuando se sustituye la 3.4 en 3.3 se obtiene la funcion de activacion:
hj(Ij) =1
1 + exp[−(∑Nk
k=1 wjkOk + θj)]/θ0
(3.6)
El principal problema del entrenamiento de una red multicapa consiste en ajustar los pesos
de las capas ocultas, ya que la salida deseada es desconodida.
3.5.3. Entrenamiento por Retropropagacion
En el entrenamiento por retropropagacion despues de haber aplicado un patron a la
red como estımulo, este se propaga desde la primera capa a traves de las capas superiores
de la red, hasta generar una salida. La senal de salida se compara con la salida deseada y
se calcula una senal de error para cada una de las salidas.
Las salidas de error se propagan hacia atras, partiendo de la capa de salida, hacia
todas las neuronas de la capa oculta que contribuyen directamente a la salida, pero las
neuronas de la capa oculta solo reciben una fraccion de la senal total del error, basandose
aproximadamente en la contribucion relativa que haya aportado cada neurona a la salida
3.5 Redes Neuronales 45
original. Este proceso se repite capa por capa, hasta que todas las neuronas de la red hayan
recibido una senal de error que describa su contribucion relativa al error total. Basandose
en la senal de error percibida, se actualizan los pesos de conexion de cada neurona, para
hacer que la red converja hacia un estado que permita clasificar correctamente todos los
patrones de entrenamiento. De esta manera, a medida que se entrena la red, las neuronas de
las capas intermedias se organizan a sı mismas de modo que aprenden a reconocer distintas
caracterısticas del espacio total de entrada.
De acuerdo a la Figura 3.24, en la primera fase del metodo de retropropagacion se
introduce un vector de entrenamiento y se permite la propagacion del mismo por la red,
para calcular la salida Oj de cada nodo. Las salidas Oq de los nodos de la capa de salida
se comparan con las salidas deseadas rq con lo que se obtienen los terminos de error δq.
La segunda fase consiste en volver hacia atras por la red, pasando a cada nodo la
senal de error apropiada y realizando las correspondientes modificaciones de los pesos.
Este proceso se aplica tambien a los pesos correctores θj . Mas adelante se describe con
detalle, el entrenamiento por retropropagacion [Gonzalez and Woods, 1996].
Situados en la capa de salida, el error medio cuadratico entre las respuestas deseadas rq y
las reales Oq de los nodos de la capa de salida Q, es:
EQ =12
NQ∑
q=1
(rq −Qq)2 (3.7)
donde,NQ es el numero de nodos de la capa de salida Q, y el 1/2 se usa por conveniencia
en la notacion para el uso posterior de derivadas.
Para permitir el ajuste de los pesos de cada una de las capas de modo que minimice el
valor de una funcion de error cuya forma sea la mostrada en la ecuacion 3.7, se comienza
ajustando los pesos de forma proporcional a la derivada parcial del error con respecto a
los pesos.
∆wqp = −α∂EQ
∂wqp(3.8)
donde la capa P precede a la capa Q y α es un factor de correcion positivo.
El error EQ es una funcion de las salidas Oq, que a su vez dependen de las entradas Iq

46 3 FUNDAMENTOS
de acuerdo a la imagen ampliada que se encuentra en la parte superior de la Figura 3.24.
Utilizando la regla de la cadena21 se evalua la derivada parcial de EQ:
∂EQ
∂wqp=
∂EQ
∂Iq
∂Iq
∂wqp(3.9)
De la ecuacion 3.4:∂Iq
∂wqp=
∂
∂wpq
Np∑
p=1
wqpOp = Op (3.10)
Sustituyendo las ecuaciones 3.9 y 3.10 en la ecuacion 3.8, se obtiene
∆wqp = −α∂EQ
∂IqOp∆wqp = −αδqOp (3.11)
donde,
δq = −∂EQ
∂Iq(3.12)
Para poder calcular ∂EQ/∂Iq se utiliza la regla de la cadena y se puede expresar como la
variacion de EQ con respecto a Oq, multiplicada por la variacion de Oq con respecto a Iq.
Es decir,
δq = −∂EQ
∂Iq= −∂EQ
∂Oq
∂Oq
∂Iq(3.13)
De la ecuacion 3.7:∂EQ
∂Oq= −(rq −Oq) (3.14)
y de la ecuacion 3.5:∂Oq
∂Iq=
∂
∂Iqhq(Iq) = h′q(Iq) (3.15)
Sustituyendo las ecuaciones 3.14 y 3.15 en 3.13, se obtiene
∂q = (rq −Oq)h′q(Iq) (3.16)
que es proporcional a la magnitud del error (rq − Oq). Sustituyendo las ecuaciones 3.12,
21La regla de la cadena dice que Si y = f(u), u = g(x), y las derivadas dydu
y dudx
existen ambas, entonces
la funcion compuesta definida por y = f(g(x)) tiene una derivada dada por dydx
= dydu
dudx
[Swokowski, 1989].

3.5 Redes Neuronales 47
3.14 en la ecuacion 3.11 se obtiene:
∆wqp = α(rq −Oq)h′q(Iq)Op = αδqOp (3.17)
Cuando se introduce cualquier patron de entrenamiento en la entrada de la red es posible
saber cual es la salida de cada nodo rq. Ası se puede saber como se deben ajustar los
pesos que modifican los enlaces entre la ultima y penultima capa de la red. De esta manera
concluye la primera fase del metodo de retropropagacion.
Para analizar la segunda fase se comienza a analizar lo que sucede en la capa P . Al
realizar el procedimiento antes visto, se tiene:
∆wpj = α(rp −Op)h′p(Ip)Oj = αδpOj (3.18)
donde el error es:
δp = (rp −Op)h′p(Ip) (3.19)
En las ecuaciones anteriores 3.18 y 3.19 solo se desconoce rp, el cual carece de importan-
cia en una capa interna, dado que no se sabe cual serıa la respuesta de un nodo interno
respecto a la pertenencia del patron a una clase. Solo se puede especificar la respuesta en
las salidas de la red, donde se realiza la clasificacion definitiva del patron. Por lo tanto,
se debe encontrar una forma de definir δp en terminos de cantidades conocidas o que se
puedan observar en la red.
Considerando la ecuacion 3.13, se observa que es posible escribir el termino correspon-
diente al error de la capa P como:
δp = −∂EP
∂Ip= −∂EP
∂Op
∂Op
∂Ip(3.20)
De acuerdo a la ecuacion 3.15 el termino ∂Op
∂Ipes:
∂Op
∂Ip=
∂
∂hphp(Ip) = h′p(Ip) (3.21)

48 3 FUNDAMENTOS
que resulta conocido cuando se ha especificado hp, ya que es posible observar Ip. El termino
rq proviene de la derivada ∂EP∂Op
, ası que se debe encontrar una expresion que no contenga
rp. Utilizando la regla de la cadena, se puede escribir la derivada como:
∂EP
∂Op= −
NQ∑
q=1
∂EP
∂Iq
∂Iq
∂Op=
NQ∑
q=1
(−∂EP
∂Iq)
∂
∂Op
NP∑
p=1
WqpOP =NQ∑
q=1
(−∂EP
∂Iq)wqp =
NQ∑
q=1
δqwqp
(3.22)
donde, la ultima expresion se obtiene de 3.12. Al sustituir las ecuaciones 3.21 y 3.22 en la
ecuacion 3.20 se obtiene la expresion requerida δp:
δp = h′p(Ip)NQ∑
q=1
δqwqp (3.23)
Con esta expresion, se puede calcular el factor δp, ya que todos sus terminos se conocen.
Las ecuaciones 3.18 y 3.23 establecen la regla de entrenamiento para la capa P . Despues
de calcular el termino del error y los pesos de la capa P , se pueden usar estos resultados
para calcular el error y los pesos de la capa inmediatamente anterior a la capa P , es decir
se propaga hacia atras el error de la red a partir del error de la capa de salida.
De esta forma al generalizar el procedimiento anterior se tiene que, para cualquier par
de capas K y J , siendo la capa K la que precede a la capa J , se deben calcular los pesos
wi,j que modifican los pesos entre ambas capas, utilizando
∆wi,j = αδjOk (3.24)
Si la capa J es la capa de salida, δj es:
δj = (rj −Oj)h′j(Ij) (3.25)
Si la capa J es una capa interna y P es la siguiente capa (por la derecha), entonces δj esta
dado por
δj = h′j(Ij)NP∑
p=1
δpwjp (3.26)

3.5 Redes Neuronales 49
para j = 1, 2, ..., Nj .
Al utilizar la funcion de activacion de la ecuacion 3.6 con θ0 = 1, se obtiene
h′j(Ij) = Oj(1−Oj) (3.27)
en este caso las ecuaciones 3.25 y 3.26 se expresan de la siguiente forma para la capa de
salida:
δj = (rj −Oj)Oj(1−Oj) (3.28)
y para las capas internas:
δj = Oj(1−Oj)NP∑
p=1
δP wjp (3.29)
En ambas ecuaciones j = 1, 2, ..., Nj .
Un metodo para minimizar la funcion de error medio es el Gradiente Escalado Con-
jugado que puede entrenar cualquier red neuronal cuyos pesos, entradas y funciones de
transferencia posean funciones que puedan ser derivadas. La Retropropagacion es usada
para calcular derivadas de desempeno con respecto a los pesos y bias22 de las funciones. El
Gradiente Escalado Conjugado se basa en direcciones conjugadas y no realiza busquedas
en lınea en cada iteracion [MathWorks, 2000], el procedimiento detallado de este metodo
se puede encontrar en [Mitchell, 1997]. Las condiciones de paro para este tipo de entrena-
miento son:
El numero maximo de epocas (repeticiones) sea alcanzado.
La maxima cantidad de tiempo ha sido excedida.
El desempeno ha sido minimizado a la meta.
El gradiente de desempeno cae por debajo del mınimo..
El desempeno de la validacion ha superado el numero maximo de fallas de validacion
desde la ultima vez que ocurrio el ultimo fallo (Cuando se usa validacion).22Es un sesgo del error, dado por δbθ(d) = E[d(X) − θ], donde d(X) es un estimador de θ, y θ es un
parametro a evaluar [Alpaydm, 2004]. Segun [Kohavi, 1995] el bias de un metodo para estimar un parametroθ esta definido como el valor esperado menos el valor estimado.
50 3 FUNDAMENTOS
Es importante recalcar que no existe una tecnica para determinar el numero de capas
ocultas, ni el numero de neuronas que debe contener cada una de ellas para un problema
especıfico, esta eleccion es determinada por la experiencia del disenador quien debe cum-
plir con las limitaciones computacionales. Ademas durante el proceso de entrenamiento, la
red Retropropagacion tiende a desarrollar relaciones internas entre neuronas con el fin de
organizar los datos de entrenamiento en clases [Gonzalez and Woods, 1996].
3.6. Tecnicas de Validacion
Existen diversos metodos para medir la precision en los resultados obtenidos por un
clasificador. Uno de estos es la tecnica de Ten Fold Cross Validation –TFCV–. Esta tecnica
se realiza siguiendo 4 etapas:
1. Dividir el conjunto de datos en 10 partes iguales.
2. Tomar 9 partes para entrenar y una para probar.
3. Rotar los datos de tal manera que las partes elegidas para entrenar y para probar no
sean siempre las mismas.
4. Calcular la taza de error global, que es igual al promedio de las tazas de error obte-
nidas en cada particion.
Una vez concluıdas las 4 etapas de TFCV, se tiene un valor muy aproximado al ındice de
reconocimiento real de la tecnica usada para la clasificacion [Moore, 2001].
Por otra parte, los estudios realizados por [Kohavi, 1995] indican que la tecnica Ten-
fold stratified cross validation es buena para la seleccion de un modelo clasificador.
Si se desea hacer mas eficiente el entrenamiento de una red neuronal es posible aplicar
algunas tecnicas de pre y post procesamiento a los datos de entrada de la red. Algunas
tecnicas utiles son:
La normalizacion que se realiza al dividir todos los datos de entrada entre el valor
del dato mayor.
3.6 Tecnicas de Validacion 51
Normalizar la media y la desviacion estandar de los datos de entrenamiento, es decir
hacer que estos tengan una media=0 y desviacion estandar=1.
El uso de Analisis de componentes principales.


Capıtulo 4
Estado del Arte
Como se ha comentado en capıtulos anteriores, el objetivo principal de este trabajo
de tesis es clasificar a leucocitos en segmentados y no segmentados utilizando como crite-
rio principal la forma de su nucleo, ası que en busqueda de un metodo de segmentacion
que permita separar al nucleo lo mejor posible para lograr una buena extraccion de ca-
racterısticas, se han encontrado algunos trabajos relacionados con esta problematica. A
continuacion se comentan algunos de ellos.
4.1. Segmentacion de una imagen celular para diagnostico
patologico
Este trabajo fue desarrollado por Dorin Comaniciu y Peter Meer [Comaniciu, 2001], en
el que se presenta un algoritmo de segmentacion celular que detecta clusters en el espacio
de color Luv1 y delinea sus bordes al utilizar el procedimiento de movimiento del promedio
del gradiente ascendente2. La segmentacion se deriva al mapear los vectores de color de
la imagen y ubicarlas en un espacio especıfico. En la Figura 4.1 se muestra un bosquejo
general de la problematica abordada en este trabajo.
Las muestras utilizadas son leucocitos digitalizados, cuyos colores son caracterizados
1Modelo de color propuesto por la CIE que se deriva del espacio XYZ.2Para mas informacion sobre este metodo consultar: D. Comaniciu, P. Meer, Distribution free descom-
position of multivariate data, Pattern analysis and applications, Vol.2 No. 1, pp. 22-30, 1999.

54 4 ESTADO DEL ARTE
Figura 4.1: Proceso de segmentacion de imagenes celulares para diagnosticopatologico.
Figura 4.2: Imagen de un leucocito tıpico. La imagen segmentada se presenta enpseudocolor.
por pocos elementos, clusters no gaussianos cuyas figuras son aisladas a partir de la imagen
que esta siendo procesada. Metodos no parametricos tales como el analisis basado en la
moda, son particularmente convenientes para la segmentacion de este tipo de datos debido
a que no definen las formas de los clusters. Algunos resultados de la segmentacion producida
en este trabajo se muestran en las Figuras 4.2, 4.3 y 4.4, tomadas de [Comaniciu, 2001].
En el trabajo de Dorin Comaniciu y Peter Meer, el uso de metodos probabilısticos
para realizar la segmentacion se tomo como elemento importante en el proceso de eleccion
de una tecnica que permitiera conseguir buenos resultados en la segmentacion efectuada
en este trabajo de tesis. Ademas de la posibilidad de trabajar con un espacio de color
distinto al RGB, que permitiera anular los efectos indeseados causados por los cambios de
iluminacion durante la digitalizacion de las muestras.
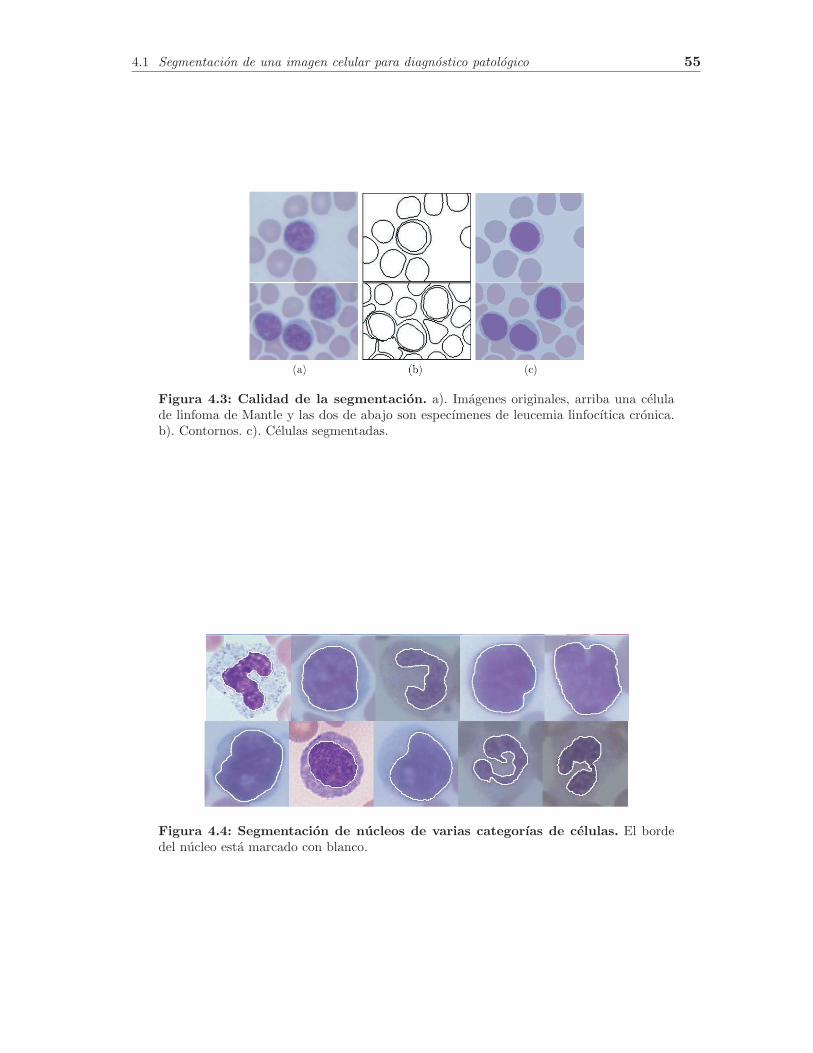
4.1 Segmentacion de una imagen celular para diagnostico patologico 55
Figura 4.3: Calidad de la segmentacion. a). Imagenes originales, arriba una celulade linfoma de Mantle y las dos de abajo son especımenes de leucemia linfocıtica cronica.b). Contornos. c). Celulas segmentadas.
Figura 4.4: Segmentacion de nucleos de varias categorıas de celulas. El bordedel nucleo esta marcado con blanco.
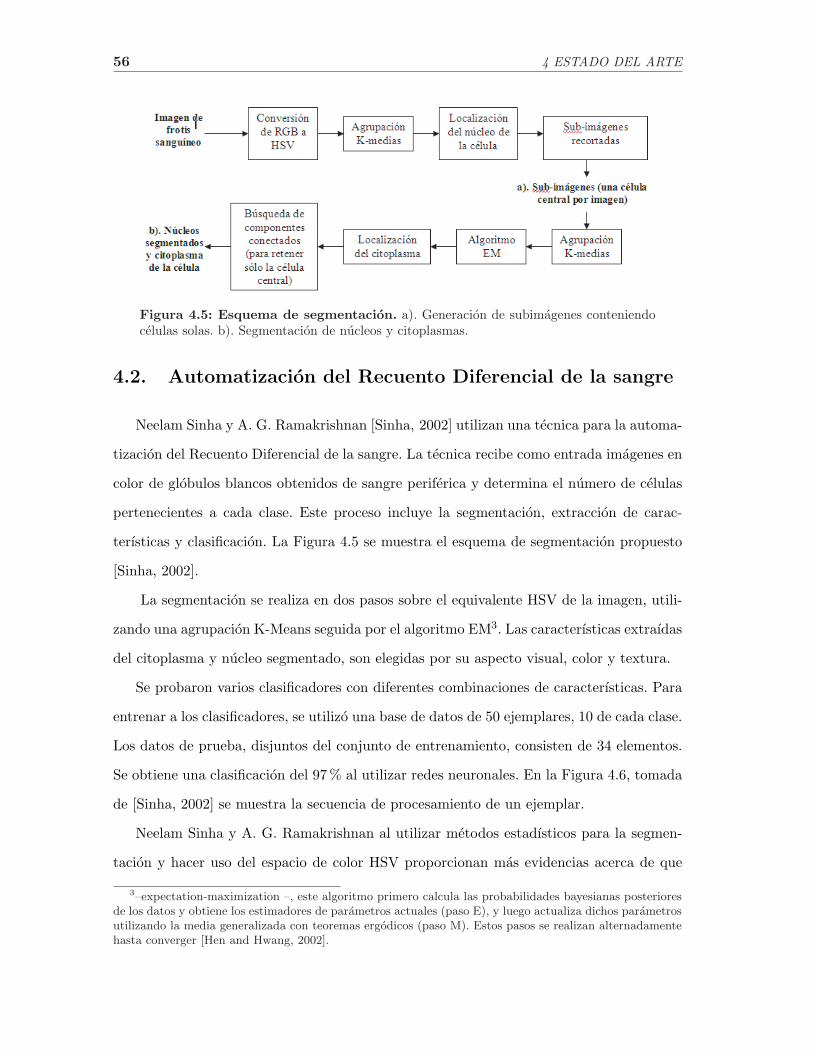
56 4 ESTADO DEL ARTE
Figura 4.5: Esquema de segmentacion. a). Generacion de subimagenes conteniendocelulas solas. b). Segmentacion de nucleos y citoplasmas.
4.2. Automatizacion del Recuento Diferencial de la sangre
Neelam Sinha y A. G. Ramakrishnan [Sinha, 2002] utilizan una tecnica para la automa-
tizacion del Recuento Diferencial de la sangre. La tecnica recibe como entrada imagenes en
color de globulos blancos obtenidos de sangre periferica y determina el numero de celulas
pertenecientes a cada clase. Este proceso incluye la segmentacion, extraccion de carac-
terısticas y clasificacion. La Figura 4.5 se muestra el esquema de segmentacion propuesto
[Sinha, 2002].
La segmentacion se realiza en dos pasos sobre el equivalente HSV de la imagen, utili-
zando una agrupacion K-Means seguida por el algoritmo EM3. Las caracterısticas extraıdas
del citoplasma y nucleo segmentado, son elegidas por su aspecto visual, color y textura.
Se probaron varios clasificadores con diferentes combinaciones de caracterısticas. Para
entrenar a los clasificadores, se utilizo una base de datos de 50 ejemplares, 10 de cada clase.
Los datos de prueba, disjuntos del conjunto de entrenamiento, consisten de 34 elementos.
Se obtiene una clasificacion del 97% al utilizar redes neuronales. En la Figura 4.6, tomada
de [Sinha, 2002] se muestra la secuencia de procesamiento de un ejemplar.
Neelam Sinha y A. G. Ramakrishnan al utilizar metodos estadısticos para la segmen-
tacion y hacer uso del espacio de color HSV proporcionan mas evidencias acerca de que
3–expectation-maximization –, este algoritmo primero calcula las probabilidades bayesianas posterioresde los datos y obtiene los estimadores de parametros actuales (paso E), y luego actualiza dichos parametrosutilizando la media generalizada con teoremas ergodicos (paso M). Estos pasos se realizan alternadamentehasta converger [Hen and Hwang, 2002].

4.3 Mejorado automatico de deteccion de piel en imagenes de color 57
Figura 4.6: Secuencia de procesamiento. a. Imagen original. b. Imagen saturada. c.Salida K-medias. d. Salida final.
la segmentacion de celulas sanguıneas es buena cuando se hace un estudio probabilıstico
de la distribucion del color sobre un espacio de color que maneja de forma separada la
informacion de la croma y la de iluminacion.
Adicionalmente se comenta que el conjunto de entrenamiento se forma con igual nume-
ro de elementos de cada clase, lo que tambien se considero en este trabajo de tesis al elegir
la cantidad de elementos que constituyen el conjunto de entrenamiento.
4.3. Mejorado automatico de deteccion de piel en imagenes
de color
En este trabajo Filipe Tomaz, Tiago Candeias y Hamid Shahbazkia [Tomaz et al., 2003]
muestran una tecnica de deteccion automatica de piel. Las imagenes obtenidas se escalan
y se utiliza el espacio de color TSL debido a que los efectos ocasionados por el brillo y
los cambios de iluminacion se reducen, de esta manera la distribucion de color de la piel
se puede representar con un modelo Gaussiano. Tambien se hace uso de un filtro inicial
obtenido experimentalmente para eliminar pixeles que por sus caracterısticas en el modelo
RGB, no pueden pertenecer a la piel.
Como medida de similitud, se utiliza la Distancia de Mahalanobis para obtener un um-
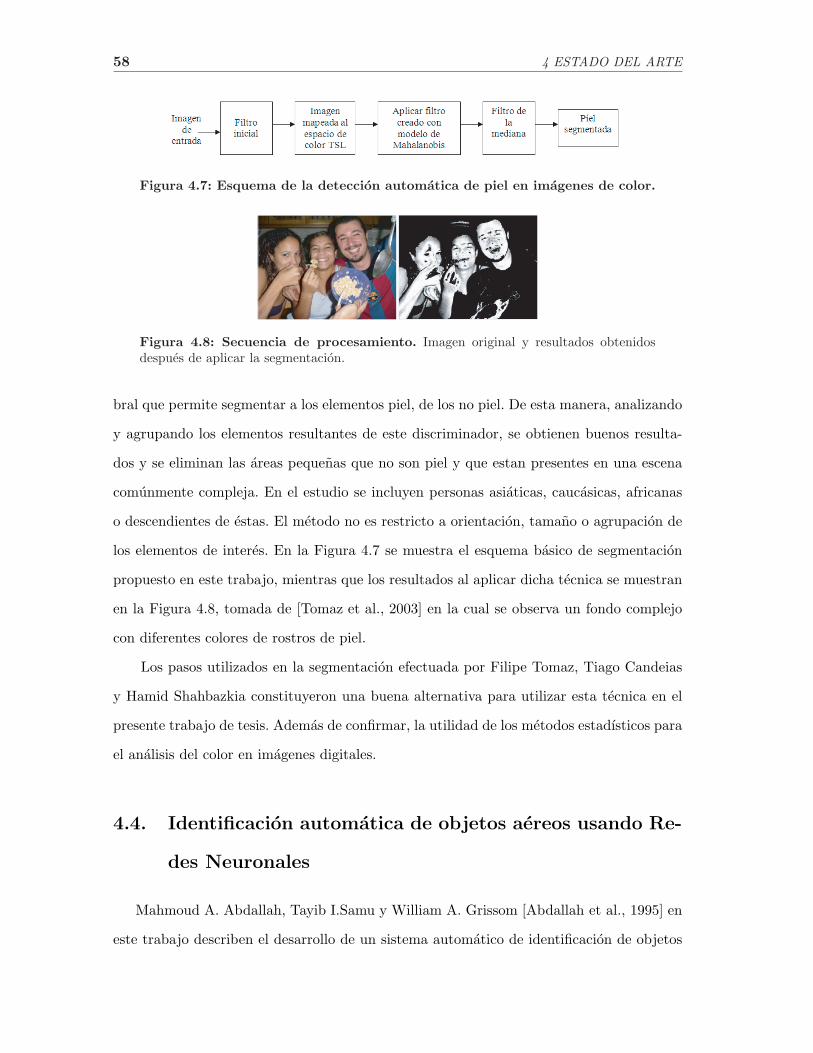
58 4 ESTADO DEL ARTE
Figura 4.7: Esquema de la deteccion automatica de piel en imagenes de color.
Figura 4.8: Secuencia de procesamiento. Imagen original y resultados obtenidosdespues de aplicar la segmentacion.
bral que permite segmentar a los elementos piel, de los no piel. De esta manera, analizando
y agrupando los elementos resultantes de este discriminador, se obtienen buenos resulta-
dos y se eliminan las areas pequenas que no son piel y que estan presentes en una escena
comunmente compleja. En el estudio se incluyen personas asiaticas, caucasicas, africanas
o descendientes de estas. El metodo no es restricto a orientacion, tamano o agrupacion de
los elementos de interes. En la Figura 4.7 se muestra el esquema basico de segmentacion
propuesto en este trabajo, mientras que los resultados al aplicar dicha tecnica se muestran
en la Figura 4.8, tomada de [Tomaz et al., 2003] en la cual se observa un fondo complejo
con diferentes colores de rostros de piel.
Los pasos utilizados en la segmentacion efectuada por Filipe Tomaz, Tiago Candeias
y Hamid Shahbazkia constituyeron una buena alternativa para utilizar esta tecnica en el
presente trabajo de tesis. Ademas de confirmar, la utilidad de los metodos estadısticos para
el analisis del color en imagenes digitales.
4.4. Identificacion automatica de objetos aereos usando Re-
des Neuronales
Mahmoud A. Abdallah, Tayib I.Samu y William A. Grissom [Abdallah et al., 1995] en
este trabajo describen el desarrollo de un sistema automatico de identificacion de objetos
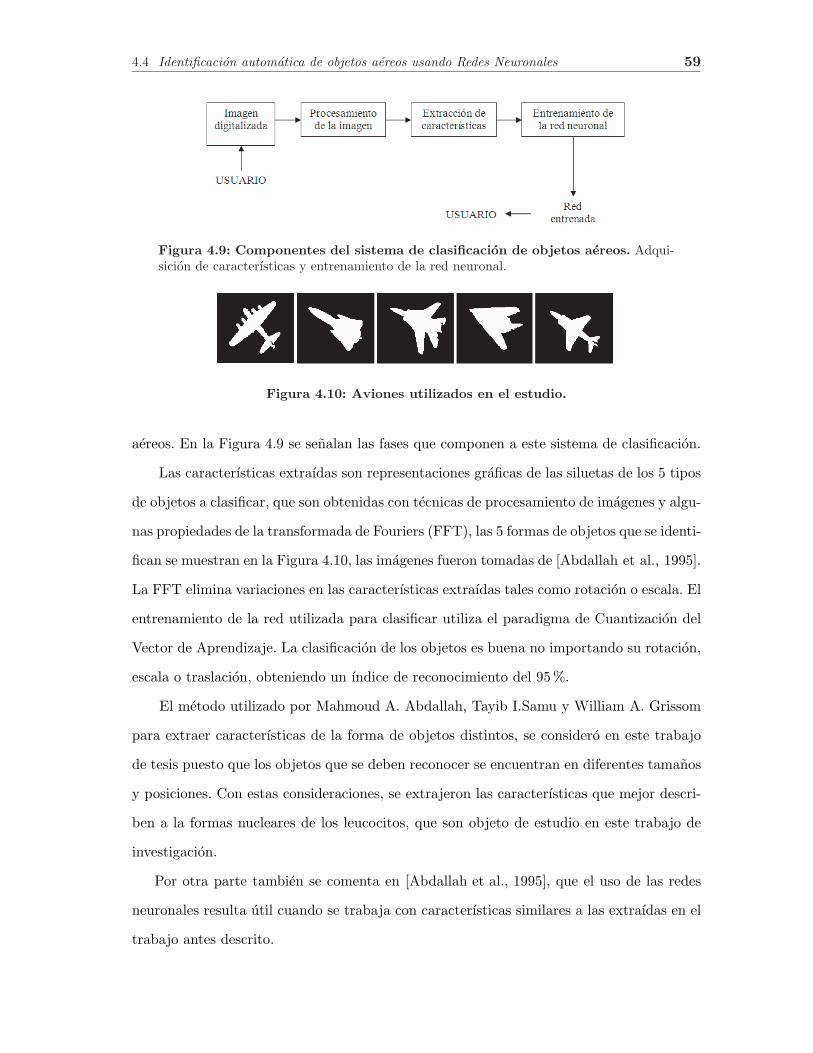
4.4 Identificacion automatica de objetos aereos usando Redes Neuronales 59
Figura 4.9: Componentes del sistema de clasificacion de objetos aereos. Adqui-sicion de caracterısticas y entrenamiento de la red neuronal.
Figura 4.10: Aviones utilizados en el estudio.
aereos. En la Figura 4.9 se senalan las fases que componen a este sistema de clasificacion.
Las caracterısticas extraıdas son representaciones graficas de las siluetas de los 5 tipos
de objetos a clasificar, que son obtenidas con tecnicas de procesamiento de imagenes y algu-
nas propiedades de la transformada de Fouriers (FFT), las 5 formas de objetos que se identi-
fican se muestran en la Figura 4.10, las imagenes fueron tomadas de [Abdallah et al., 1995].
La FFT elimina variaciones en las caracterısticas extraıdas tales como rotacion o escala. El
entrenamiento de la red utilizada para clasificar utiliza el paradigma de Cuantizacion del
Vector de Aprendizaje. La clasificacion de los objetos es buena no importando su rotacion,
escala o traslacion, obteniendo un ındice de reconocimiento del 95 %.
El metodo utilizado por Mahmoud A. Abdallah, Tayib I.Samu y William A. Grissom
para extraer caracterısticas de la forma de objetos distintos, se considero en este trabajo
de tesis puesto que los objetos que se deben reconocer se encuentran en diferentes tamanos
y posiciones. Con estas consideraciones, se extrajeron las caracterısticas que mejor descri-
ben a la formas nucleares de los leucocitos, que son objeto de estudio en este trabajo de
investigacion.
Por otra parte tambien se comenta en [Abdallah et al., 1995], que el uso de las redes
neuronales resulta util cuando se trabaja con caracterısticas similares a las extraıdas en el
trabajo antes descrito.

60 4 ESTADO DEL ARTE
Figura 4.11: Sistema de clasificacion de celulas blancas sanguıneas.
4.5. Analisis de imagen y aprendizaje supervisado en la di-
ferenciacion automatica de celulas blancas de imagenes
microscopicas
En este trabajo R. J. Katz [Katz, 2000] desarrolla un metodo de multiples pasos (seg-
mentacion, extraccion de caracterısticas, uso de un clasificador) para diferenciar automati-
camente imagenes de celulas blancas. En la Figura 4.11 se muestran los pasos que componen
el desarrollo de este sistema.
Primero se obtiene una imagen que contiene un nucleo celular que destaca en la es-
cena, la Figura 4.12 tomada de [Katz, 2000] muestra algunos ejemplares utilizados en su
estudio. La segmentacion de la imagen en regiones de celula y no celula utiliza la deteccion
de bordes Canny (ver Figura 4.13 [Katz, 2000]) seguida por un algoritmo de identificacion
de un cırculo, en la Figura 4.14 se encuentran algunos ejemplos con resultados que mues-
tran los cırculos obtenidos por Katz. El procedimiento para la deteccion de cırculos no es
completamente automatico debido a que con el algoritmo no se obtienen buenos resultados
y la seleccion de la celula se realiza manualmente.

4.5 Analisis de imagen y aprendizaje supervisado en la diferenciacion automatica de celulasblancas de imagenes microscopicas 61
Figura 4.12: Ejemplos de imagenes completas utilizadas en la investigacion. Deizquierda a derecha: basofilo, eosinofilo, linfocito, neutrofilos.
Figura 4.13: Eosinofilo. Resultados de la deteccion de bordes Canny.
La extraccion de las caracterısticas considera criterios como el color de la celula, ta-
mano e informacion morfologica nuclear. Con estos criterios se obtienen 25 caracterısticas
correspondientes a 206 imagenes de diferentes tipos, considerando diferente cantidad de
cada clase de celula.
Finalmente se evalua a un conjunto de clasificadores4 con la herramienta WEKA5 uti-
lizando como referencia al clasificador ZeroR para compararlo con otros clasificadores. La
mejor clasificacion se obtiene con una red neuronal entrenada con el algoritmo de retro-
propagacion alcanzando un ındice de error del 1.95 %.
El desempeno de los clasificadores generalmente es mejor en las clases que contienen
mayor numero de instancias.
El estudio realizado por Katz concluye que la red neuronal de retropropagacion resulta
ser la mejor eleccion como metodo para clasificar celulas sanguıneas, y esto fue lo que con-
firmo el uso de redes neuronales en esta tesis, ademas se descarto la posibilidad de formar
un conjunto de entrenamiento con diferente numero de instancias para cada clase, pues
como lo dice Katz en su estudio, esto provoca un mayor ındice de reconocimiento sobre la
clase predominante.
4OneR, ID3, C4.5, J4.8, IBk k vecinos mas cercanos, Bayes simple y redes neuronales [Katz, 2000].5Ambiente para analisis de conocimiento que trabaja en plataforma Java y permite entrenar a un grupo
de clasificadores con un conjunto de datos comunes introducidos en un archivo [Katz, 2000].
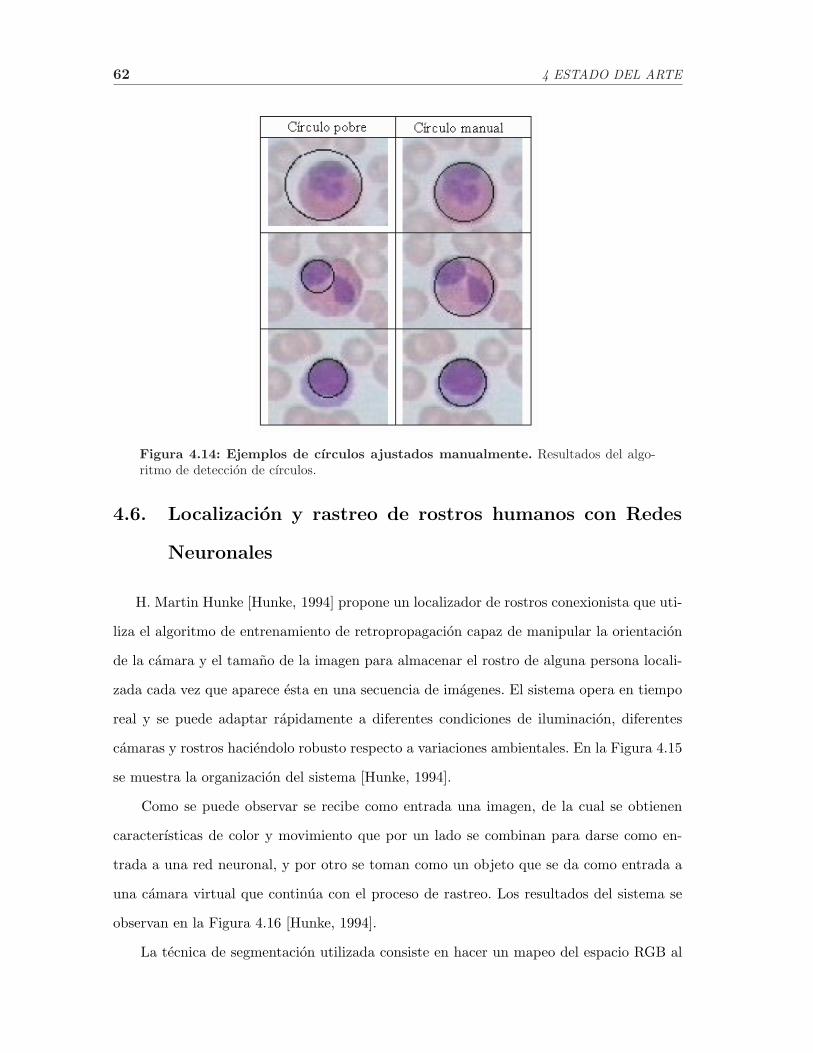
62 4 ESTADO DEL ARTE
Figura 4.14: Ejemplos de cırculos ajustados manualmente. Resultados del algo-ritmo de deteccion de cırculos.
4.6. Localizacion y rastreo de rostros humanos con Redes
Neuronales
H. Martin Hunke [Hunke, 1994] propone un localizador de rostros conexionista que uti-
liza el algoritmo de entrenamiento de retropropagacion capaz de manipular la orientacion
de la camara y el tamano de la imagen para almacenar el rostro de alguna persona locali-
zada cada vez que aparece esta en una secuencia de imagenes. El sistema opera en tiempo
real y se puede adaptar rapidamente a diferentes condiciones de iluminacion, diferentes
camaras y rostros haciendolo robusto respecto a variaciones ambientales. En la Figura 4.15
se muestra la organizacion del sistema [Hunke, 1994].
Como se puede observar se recibe como entrada una imagen, de la cual se obtienen
caracterısticas de color y movimiento que por un lado se combinan para darse como en-
trada a una red neuronal, y por otro se toman como un objeto que se da como entrada a
una camara virtual que continua con el proceso de rastreo. Los resultados del sistema se
observan en la Figura 4.16 [Hunke, 1994].
La tecnica de segmentacion utilizada consiste en hacer un mapeo del espacio RGB al

4.6 Localizacion y rastreo de rostros humanos con Redes Neuronales 63
Figura 4.15: Estructura del sistema de localizacion y rastreo de rostros huma-nos.
espacio RG considerando que el color caracterıstico de la piel contiene escasa o nula infor-
macion de B. En la Figura 4.17 tomada de [Hunke, 1994], se describe el procedimiento.
El ındice de reconocimiento obtenido por la red es de 95.2% cuando se entrena con
una combinacion de caracterısticas de color y de movimiento, mientras que al entrenar con
solo caracterısticas de movimiento el ındice de reconocimiento es de un 68 %.
La aportacion que se toma del trabajo de H. Martin Hunke se relaciona con la posi-
bilidad de eliminar informacion de algun canal cuando se trabaja en un espacio de color
especıfico. El analisis de color realizado por Hunke durante la segmentacion es motivado
por el hecho de que la informacion del canal que no se considera en el analisis, no es im-
portante.
Por otro lado, el uso de la red neuronal de retropropagacion utilizada en el trabajo de
Hunke confirma que esta tecnica de clasificacion da buenos resultados.

64 4 ESTADO DEL ARTE
Figura 4.16: Localizacion de un rostro. a). Imagen original b). Imagenes en secuenciac). Diferencia de las dos imagenes d). Conjunto de pixeles con caracterısticas de movi-miento e). Aplicacion del clasificador general de color de rostros –GFCC– f). Conjunto depixeles con caracterısticas de color de piel g). Objetos con caracterısticas de movimientoy color de piel h). Objetos mas grandes i). Rostro localizado.
Figura 4.17: Creacion del clasificador de color de rostros. a). Primero se escogeun area de interes en la imagen b). Se crea un modelo de distribucion de color para elarea seleccionada c). Se umbraliza como pixeles de piel aquellos que posean valores que seencuentren dentro de la media promedio.
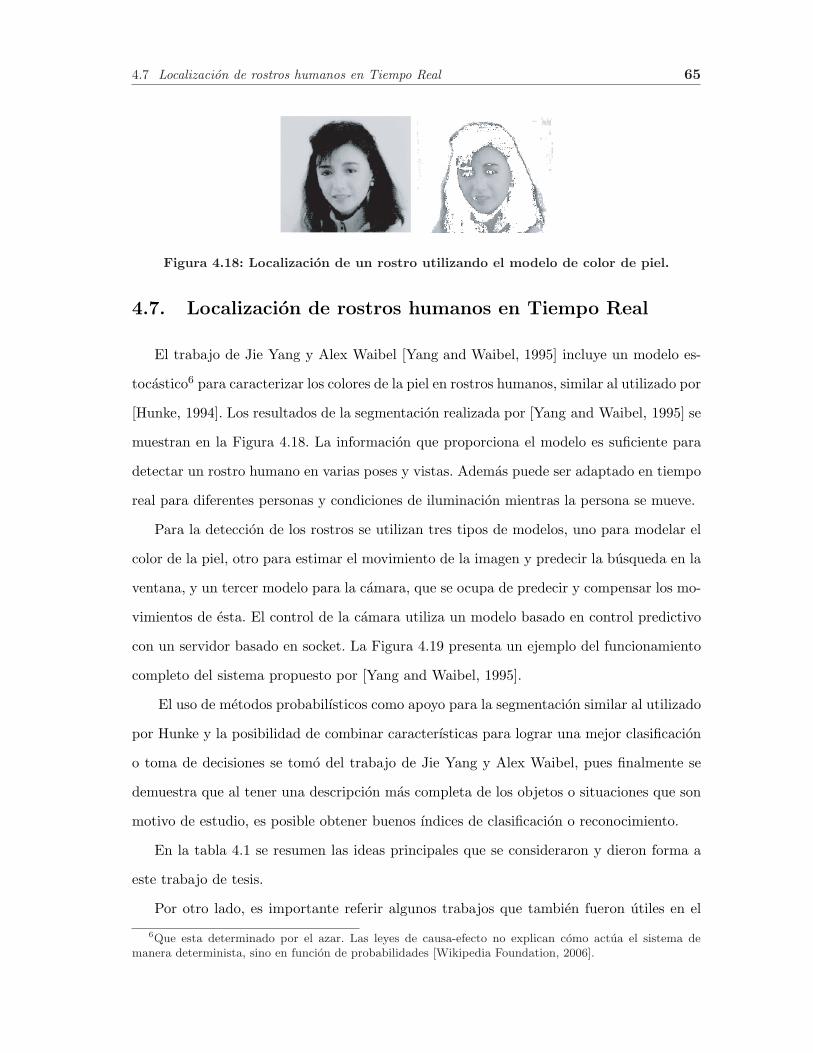
4.7 Localizacion de rostros humanos en Tiempo Real 65
Figura 4.18: Localizacion de un rostro utilizando el modelo de color de piel.
4.7. Localizacion de rostros humanos en Tiempo Real
El trabajo de Jie Yang y Alex Waibel [Yang and Waibel, 1995] incluye un modelo es-
tocastico6 para caracterizar los colores de la piel en rostros humanos, similar al utilizado por
[Hunke, 1994]. Los resultados de la segmentacion realizada por [Yang and Waibel, 1995] se
muestran en la Figura 4.18. La informacion que proporciona el modelo es suficiente para
detectar un rostro humano en varias poses y vistas. Ademas puede ser adaptado en tiempo
real para diferentes personas y condiciones de iluminacion mientras la persona se mueve.
Para la deteccion de los rostros se utilizan tres tipos de modelos, uno para modelar el
color de la piel, otro para estimar el movimiento de la imagen y predecir la busqueda en la
ventana, y un tercer modelo para la camara, que se ocupa de predecir y compensar los mo-
vimientos de esta. El control de la camara utiliza un modelo basado en control predictivo
con un servidor basado en socket. La Figura 4.19 presenta un ejemplo del funcionamiento
completo del sistema propuesto por [Yang and Waibel, 1995].
El uso de metodos probabilısticos como apoyo para la segmentacion similar al utilizado
por Hunke y la posibilidad de combinar caracterısticas para lograr una mejor clasificacion
o toma de decisiones se tomo del trabajo de Jie Yang y Alex Waibel, pues finalmente se
demuestra que al tener una descripcion mas completa de los objetos o situaciones que son
motivo de estudio, es posible obtener buenos ındices de clasificacion o reconocimiento.
En la tabla 4.1 se resumen las ideas principales que se consideraron y dieron forma a
este trabajo de tesis.
Por otro lado, es importante referir algunos trabajos que tambien fueron utiles en el
6Que esta determinado por el azar. Las leyes de causa-efecto no explican como actua el sistema demanera determinista, sino en funcion de probabilidades [Wikipedia Foundation, 2006].

66 4 ESTADO DEL ARTE
AUTOR NOMBRE DATOS CLASES TECNICA
DorinComaniciu yPeter Meer
Segmentacion deimagen celularpara diagnosticopatologico
Imagenes decelulassanguıneas
linfomas malignos,leucemia linfocıticacronica
movimiento de lamedia
Neelam Sinha yA. G.Ramakrishnan
Automatizacion derecuento diferencialde la sangre
Imagenes decelulassanguıneas
linfocitos,monocitos,neutrofilos,basofilos,eosinofilos
bayes, redesneuronales.Reconocimiento:97%
Filipe Tomaz,Tiago Candeiasy HamidShahbazkia
Deteccionautomatica de pielen imagenes encolor
Imagenes deescenas quecontienen pielhumana
piel humana deraza asiatica,causasica, africanao descendiente deestas
distancia deMahalanobis yfiltro de mediana
Mahmoud A.Abdallah, TayibI. Samu yWilliam A.Grissom
Identificacionautomatica deobjetos aereosusando redesneuronales
Imagenes deescenas quecontienen alguntipo de objetoaereo
Tipo de objetoaereo de un totalde 5
FFT, redneuronal tipoLVQ.Reconocimiento:95%
R. J. Katz
Analisis de imageny aprendizajesupervisado en ladiferenciacionautomatica decelulas blancas deimagenesmicroscopicas
Imagenes decelulas blancasde la sangre
Tipo celula:neutrofilo, basofilo,eosinofilo, linfocito,monocito
Filtro de canny,bayes, zero, ID3,C4.5, redesneuronales.Reconocimiento:95.2%
H. MartinHunke
Localizacion yrastreo de rostroshumanos con redesneuronales
Imagenes decontienen pielhumana
piel humanaRedes neuronales.Reconocimiento:95.2%
Jie Yang y AlexWaibel
Localizacion derostros humanos entiempo real
Imagenes quecontienen pielhumana
piel humana Modeloestocastico
Marıa del RocıoOchoa Montiel
Clasificacion deleucocitosutilizando visionpor computadora
Imagenes defrotis sanguıneo
leucocitossegmentados,leucocitos nosegmentados
Segmentacion encolor con modelode Mahalanobis yred neuronal deretropropagacion.Reconocimiento:99.54%
Tabla 4.1: Principales trabajos relacionados

4.7 Localizacion de rostros humanos en Tiempo Real 67
Figura 4.19: Ejemplo de localizacion de un rostro usando una combinacion decolor, geometrıa, e informacion de movimiento.
desarrollo de este trabajo de tesis. Entre ellos se encuentra la investigacion de J. C. Terri-
llon [Terrillon et al., 1998], quien utiliza un modelo de color de piel basado en la metrica de
Mahalanobis y realiza un analisis de forma basado en momentos invariantes para detectar
automaticamente rostros humanos en imagenes de escenas naturales bidimensionales. Para
distinguir los rostros de otros distractores se utiliza una red neuronal multicapa entrenada
con el algoritmo de retropropagacion, la cual recibe como vector entrada a los momentos
invariantes que se obtienen de la region segmentada como piel. Sus resultados demuestran
la eficiencia de la combinacion de la segmentacion en color y los momentos invariantes usa-
dos en la deteccion de rostros que se encuentran en diferentes poses y rodeados de fondos
complejos.
J. C. Terrillon y Shigeru Akamatsu en [Terrillon and Akamatsu, 2000], presentan un
analisis de diferentes espacios de crominancia para la segmentacion en color de rostros
humanos en escenas complejas, donde se concluye que el espacio de crominancia TSL es el
espacio que modela mejor el color de la piel humana.
Un metodo propuesto por [Perez and Hague, 2002] para un sistema de razonamiento
basado en logica difusa es capaz de elegir dinamicamente el mejor umbral para binarizar
una imagen en niveles de gris. Los resultados se prueban sobre un amplio conjunto de se-
cuencias en tiempo real de imagenes de un campo de coliflores, donde uno de los objetivos
es apoyar a un experto en la toma de decisiones, tales como el rocıo de fertilizante, agua o
68 4 ESTADO DEL ARTE
pesticida. Ademas el sistema responde satisfactoriamente ante cambios en la iluminacion.
En el trabajo de Daniela Mayumi y colaboradores [Ushizima et al., 2004] se presenta
un analisis de textura para el reconocimiento de leucocitos, donde la informacion textural
se utiliza para el calculo de probabilidades que se utilizan como metrica para caracterizar
la organizacion espacial de los niveles de gris. Los resultados experimentales muestran que
los parametros de textura son patrones especıficos de leucocitos, utiles en la diferenciacion
de leucocitos normales y leucocitos de leucemia linfocıtica cronica, evidenciando aspectos
de interes para el hematologo tales como la cromatina7 nuclear y citoplasmica.
Guzman de Leon [Guzman, 2002], en un analisis de imagenes colposcopicas busca de-
tectar imagenes elementales de una manera automatica o semiautomatica, de tal forma
que no sea necesario que el ginecologo colposcopista trace a mano esas regiones. El detec-
tar esas imagenes elementales permite eliminar subjetividades como localizacion, tamano,
distancia, color y forma. Ademas resulta util encontrar un parametro que permita recono-
cer una patologıa dada. El analisis de imagenes se hace con una tecnica de segmentacion
que trabaja sobre el espacio de representacion de color, utilizando PCA para hacer una
transformacion lineal que permite modelar un espacio de color exclusivo para imagenes
colsposcopicas.
Finalmente Ivon Arroyo y Agustın Schapira [Schapira and Arroyo, 1994] en su conta-
dor de celulas utilizan una tecnica que permite realizar la identificacion y conteo celular de
2 maneras. La primera consiste en seleccionar los objetos de interes a partir de los umbrales
de color mınimo y maximo que se desean en las celulas. La segunda forma de realizar la
identificacion y conteo, se relaciona con las medidas reales que se requieren para aislar a
las celulas que cumplan con los parametros dados por el usuario, las medidas se dan en
milımetros que posteriormente se convierten a una longitud en pixeles. En este caso, el
sistema tambien permite seleccionar con el mouse una celula de interes para buscar a otras
celulas que cumplan con dichas caracterısticas de tamano y color. El analisis de la imagen
se realiza con diversas operaciones con matrices.
7Sustancia compleja constituida por acidos nucleicos y proteınas, que se encuentra en el nucleo de lascelulas y se tine por los colorantes basicos de anilina.
Capıtulo 5
Clasificacion de leucocitos
Dentro de la primera seccion de este capıtulo se plantea la problematica de esta tesis,
mientras que en la segunda seccion se describen los modulos que componen la metodologıa
de solucion. Los detalles de la implementacion de cada modulo que constituye al metodo
de solucion propuesto se mencionan en la seccion 5.3.
5.1. Metodo para el reconocimiento de celulas sanguıneas
Segmentadas y No Segmentadas
Las funciones involucradas en la solucion a la problematica planteada en esta tesis se
basan en aplicar un procedimiento a una imagen que contiene una celula de interes, el cual
consiste en:
Extraer la region de interes, es decir la region que constituye al nucleo celular dado
que su forma determina la clase a la que pertenece la celula.
Obtener caracterısticas de la region etiquetada como nucleo.
Entrenar a una red neuronal con las caracterısticas adquiridas previamente.
La implementacion de la solucion propuesta en esta tesis se realizo en Matlab debido
a las caracterısticas de uso facil, buen desempeno en el calculo de operaciones matemati-
70 5 CLASIFICACION DE LEUCOCITOS
cas, manejo de funciones para el procesamiento de imagenes y entrenamiento de redes
neuronales.
5.2. Etapas en la solucion del problema
La solucion al problema planteado en esta tesis se compone de 5 etapas principales:
Adquisicion y preprocesamiento de la imagen.
Segmentacion en color.
Extraccion de caracterısticas.
Entrenamiento de la red.
Reconocimiento de observaciones originales.
En la Figura 5.1 se muestra la organizacion general del metodo propuesto para clasificar
leucocitos. Los bloques a) y b) que aparecen con lıneas punteadas representan dos casos
que se realizan en distintas ocasiones. Esto significa que se consideran tres metodos para
la clasificacion de leucocitos y en cada uno solo cambia el modulo de seleccion de carac-
terısticas.
En el modulo de adquisicion y preprocesamiento de la imagen se obtiene una imagen
digitalizada de un campo visto en un microscopio optico en el que se encuentra al menos
una celula de interes. En la seccion 5.3.1 se presenta una descripcion completa de esta
etapa. En el modulo de segmentacion se utiliza el modelo propuesto por Filipe Tomaz en
[Tomaz et al., 2003], que se ha adecuado para obtener la region de interes. El procedimien-
to detallado se muestra en la seccion 6.1.2.
El modulo de extraccion de caracterısticas consta de tres procedimientos disjuntos, que
permiten obtener 3 conjuntos de caracterısticas, uno por cada procedimiento. En la seccion
5.3.3 de este capıtulo se muestra una descripcion completa de dichos metodos.
En el modulo de Entrenamento de la red neuronal, se entrena a una red neuronal con
el algoritmo de retropropagacion con los vectores de caracterısticas que se obtienen con
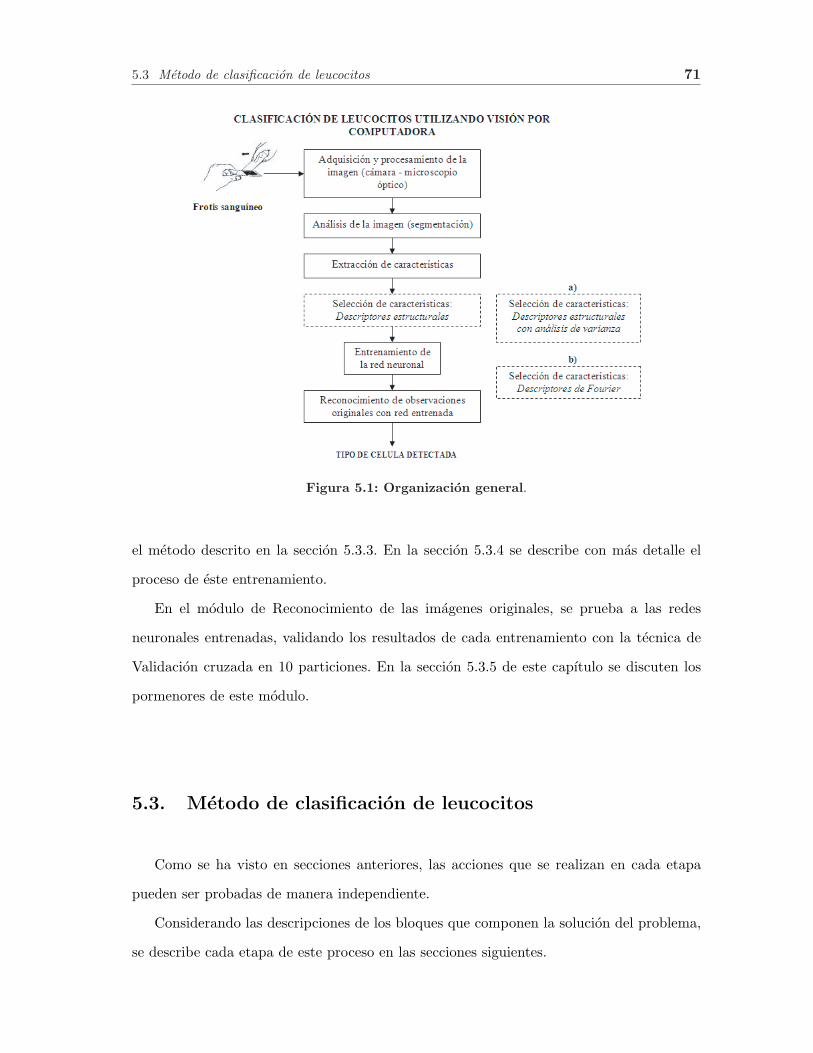
5.3 Metodo de clasificacion de leucocitos 71
Figura 5.1: Organizacion general.
el metodo descrito en la seccion 5.3.3. En la seccion 5.3.4 se describe con mas detalle el
proceso de este entrenamiento.
En el modulo de Reconocimiento de las imagenes originales, se prueba a las redes
neuronales entrenadas, validando los resultados de cada entrenamiento con la tecnica de
Validacion cruzada en 10 particiones. En la seccion 5.3.5 de este capıtulo se discuten los
pormenores de este modulo.
5.3. Metodo de clasificacion de leucocitos
Como se ha visto en secciones anteriores, las acciones que se realizan en cada etapa
pueden ser probadas de manera independiente.
Considerando las descripciones de los bloques que componen la solucion del problema,
se describe cada etapa de este proceso en las secciones siguientes.
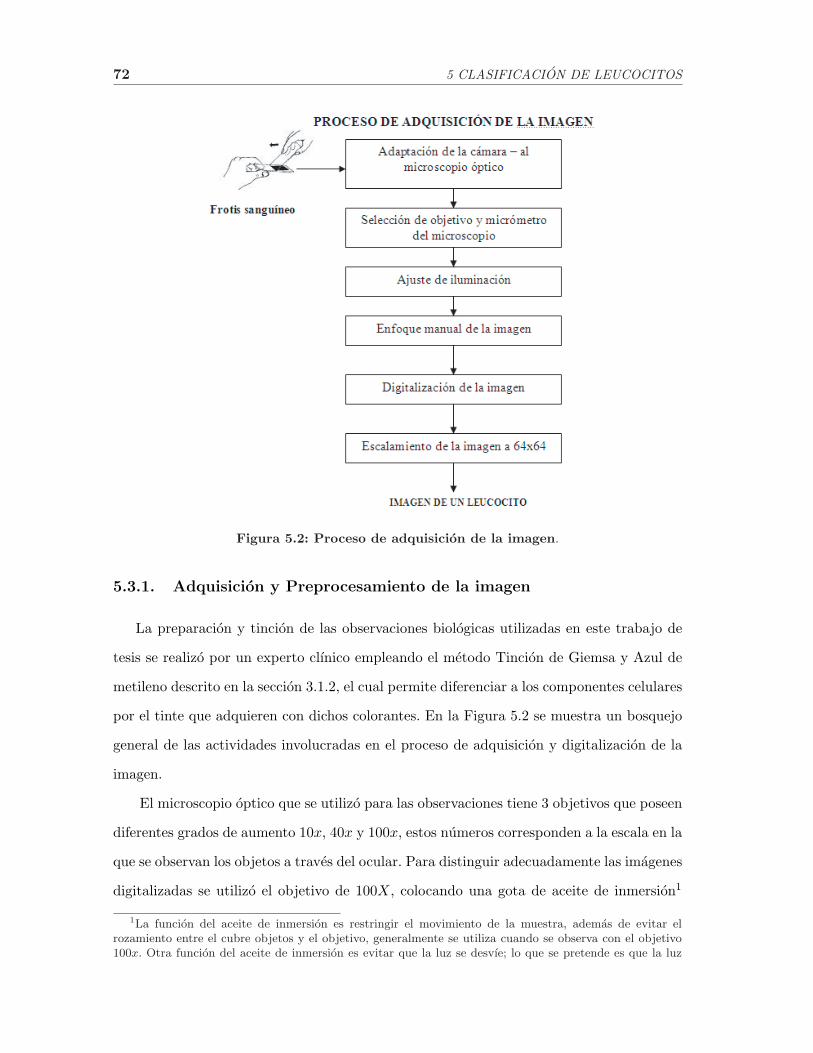
72 5 CLASIFICACION DE LEUCOCITOS
Figura 5.2: Proceso de adquisicion de la imagen.
5.3.1. Adquisicion y Preprocesamiento de la imagen
La preparacion y tincion de las observaciones biologicas utilizadas en este trabajo de
tesis se realizo por un experto clınico empleando el metodo Tincion de Giemsa y Azul de
metileno descrito en la seccion 3.1.2, el cual permite diferenciar a los componentes celulares
por el tinte que adquieren con dichos colorantes. En la Figura 5.2 se muestra un bosquejo
general de las actividades involucradas en el proceso de adquisicion y digitalizacion de la
imagen.
El microscopio optico que se utilizo para las observaciones tiene 3 objetivos que poseen
diferentes grados de aumento 10x, 40x y 100x, estos numeros corresponden a la escala en la
que se observan los objetos a traves del ocular. Para distinguir adecuadamente las imagenes
digitalizadas se utilizo el objetivo de 100X, colocando una gota de aceite de inmersion1
1La funcion del aceite de inmersion es restringir el movimiento de la muestra, ademas de evitar elrozamiento entre el cubre objetos y el objetivo, generalmente se utiliza cuando se observa con el objetivo100x. Otra funcion del aceite de inmersion es evitar que la luz se desvıe; lo que se pretende es que la luz
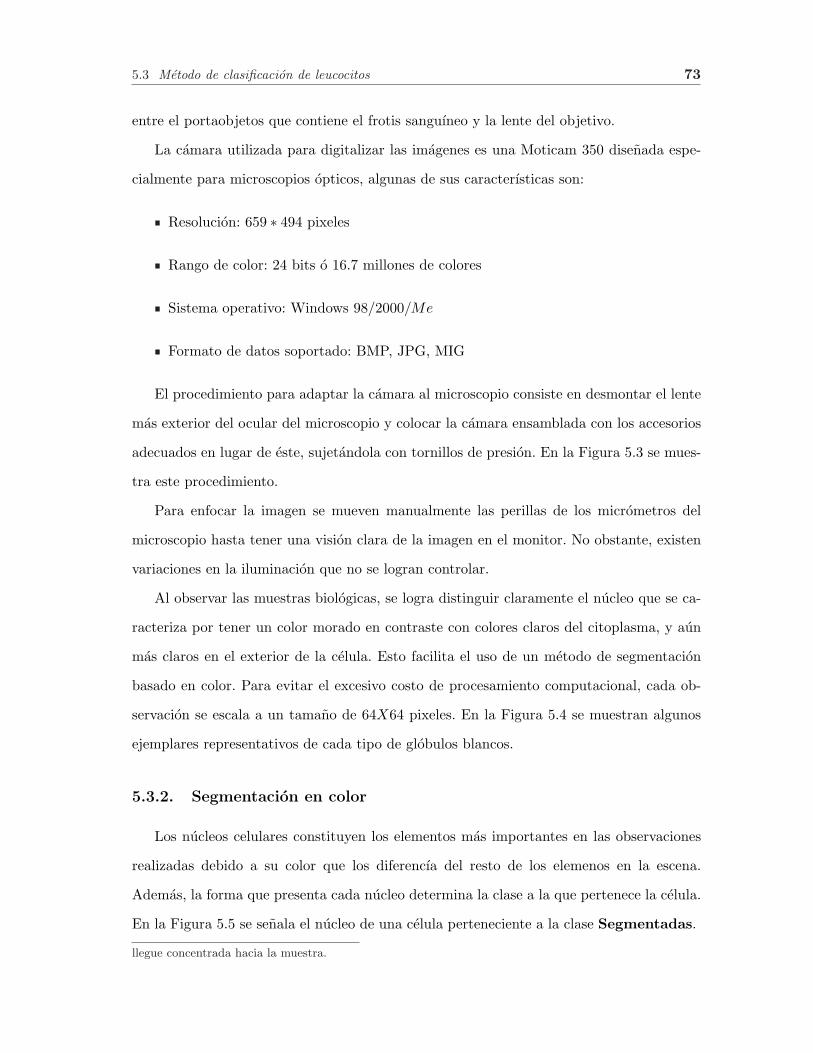
5.3 Metodo de clasificacion de leucocitos 73
entre el portaobjetos que contiene el frotis sanguıneo y la lente del objetivo.
La camara utilizada para digitalizar las imagenes es una Moticam 350 disenada espe-
cialmente para microscopios opticos, algunas de sus caracterısticas son:
Resolucion: 659 ∗ 494 pixeles
Rango de color: 24 bits o 16.7 millones de colores
Sistema operativo: Windows 98/2000/Me
Formato de datos soportado: BMP, JPG, MIG
El procedimiento para adaptar la camara al microscopio consiste en desmontar el lente
mas exterior del ocular del microscopio y colocar la camara ensamblada con los accesorios
adecuados en lugar de este, sujetandola con tornillos de presion. En la Figura 5.3 se mues-
tra este procedimiento.
Para enfocar la imagen se mueven manualmente las perillas de los micrometros del
microscopio hasta tener una vision clara de la imagen en el monitor. No obstante, existen
variaciones en la iluminacion que no se logran controlar.
Al observar las muestras biologicas, se logra distinguir claramente el nucleo que se ca-
racteriza por tener un color morado en contraste con colores claros del citoplasma, y aun
mas claros en el exterior de la celula. Esto facilita el uso de un metodo de segmentacion
basado en color. Para evitar el excesivo costo de procesamiento computacional, cada ob-
servacion se escala a un tamano de 64X64 pixeles. En la Figura 5.4 se muestran algunos
ejemplares representativos de cada tipo de globulos blancos.
5.3.2. Segmentacion en color
Los nucleos celulares constituyen los elementos mas importantes en las observaciones
realizadas debido a su color que los diferencıa del resto de los elemenos en la escena.
Ademas, la forma que presenta cada nucleo determina la clase a la que pertenece la celula.
En la Figura 5.5 se senala el nucleo de una celula perteneciente a la clase Segmentadas.
llegue concentrada hacia la muestra.

74 5 CLASIFICACION DE LEUCOCITOS
Figura 5.3: Procedimiento de instalacion de la camara. Izq.- Montaje de Accesorios.Der.- Camara ajustada al microscopio.
Figura 5.4: Tipos de Leucocitos. Segmentados: neutrofilo y eosinofilo, No Segmenta-dos: linfocito y monocito
5.3 Metodo de clasificacion de leucocitos 75
Figura 5.5: Celula segmentada neutrofila.
La segmentacion realizada utiliza un algoritmo propuesto por [Tomaz et al., 2003], que
se adecuo en esta tesis para separar nucleos celulares. En cada observacion el nucleo puede
estar ubicado en diferentes posiciones y tener un color caracterıstico en diferentes tonali-
dades. Al utilizar una tecnica de segmentacion basada en pixel, el tamano y la orientacion
de cada nucleo son irrelevantes. La Figura 5.6 presenta el procedimiento utilizado en el
proceso de segmentacion de la imagen.
En la mayorıa de las observaciones, la imagen presenta un fondo complejo y el area
que ocupa el nucleo es mas pequena que el resto de la escena. Se aplica un filtro inicial
que elimina gran parte de los pixeles que no pertenecen al nucleo. Este filtro inicial se
diseno utilizando la informacion obtenida al observar los histogramas de los canales R, G,
y B de una imagen que corresponde a un recorte de nucleo de una observacion. Al repetir
este procedimiento con las n observaciones, se obtienen histogramas similares. En la Figura
5.7 se muestra un ejemplo.
Como se puede ver, los valores para cada pixel que corresponden al canal G son pe-
quenos. En los casos en los que la imagen es muy clara o muy obscura debido a los cambios
de iluminacion producidos en el momento de su captura, se presenta un desplazamiento
pequeno a la derecha o a la izquierda, sin embargo esto no afecta significativamente los
experimentos subsecuentes.
Considerando una muestra M de tamano n, cada observacion que compone a esta mues-
tra consiste en un arreglo tridimensional X(i,j,k) correspondiente a la estructura de una
imagen, donde i = 1, 2, ..., 64, j = 1, 2, ..., 64, k = 1, 2, 3.
A partir de la informacion almacenada en X, para cada canal k se forma un histograma
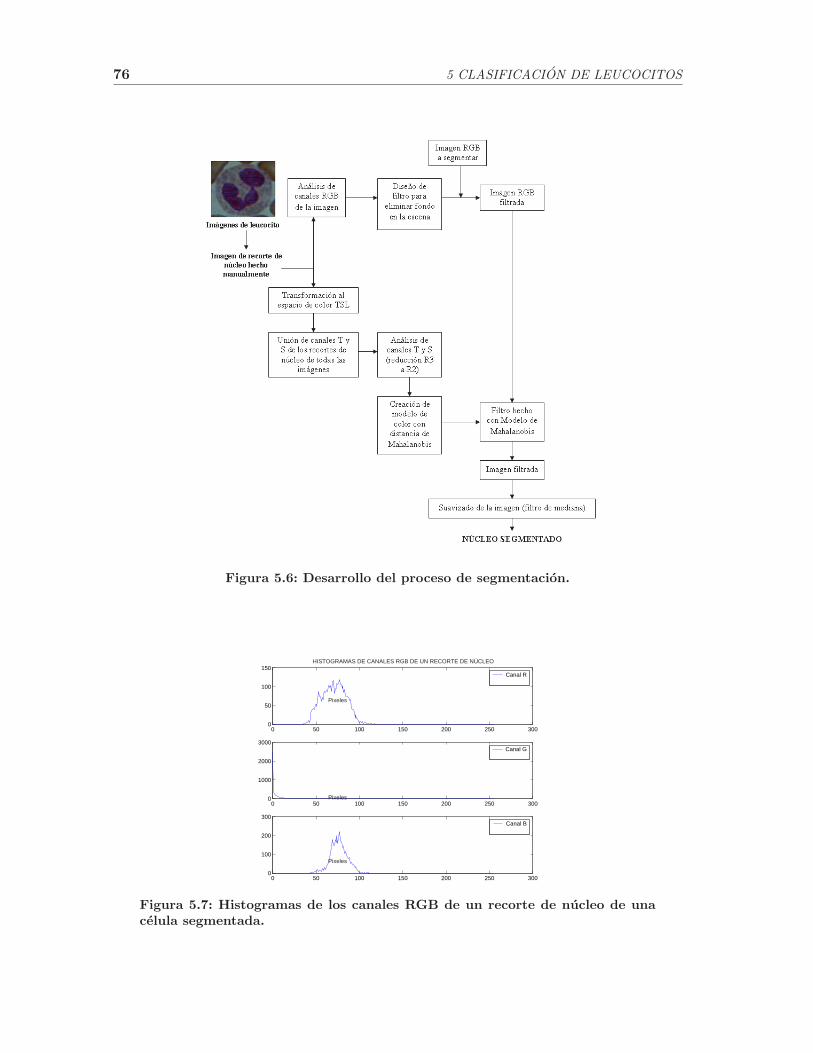
76 5 CLASIFICACION DE LEUCOCITOS
Figura 5.6: Desarrollo del proceso de segmentacion.
0 50 100 150 200 250 3000
100
200
300
Pixeles
Canal B
0 50 100 150 200 250 3000
1000
2000
3000
Pixeles
Canal G
0 50 100 150 200 250 3000
50
100
150
Pixeles
HISTOGRAMAS DE CANALES RGB DE UN RECORTE DE NÚCLEO
Canal R
Figura 5.7: Histogramas de los canales RGB de un recorte de nucleo de unacelula segmentada.

5.3 Metodo de clasificacion de leucocitos 77
Figura 5.8: Diferencias entre d1 y d2.
Hk, donde la longitud de Hk es 256 y la i-esima posicion de H contiene la ocurrencia de los
valores desde 0 para la posicion H1k hasta 255 para la posicion H256
k . Con la informacion
que se tiene en Hk, se obtienen las siguientes diferencias:
d1 = H i+1k −H i
k y d2 = H i+2k −H i+1
k (5.1)
Graficamente, esto se puede ver en la Figura 5.8.
Para cada valor de d1 y d2, se evaluan las siguientes condiciones, donde i = 1 . . . 256 :
V mini = i
V maxi = 0} Si d1 < d2 ( existe un pico mınimo)
V mini = 0
V maxi = i} Si d1 > d2 ( existe un pico maximo)
V mini = 0
V maxi = 0} Si d1 = d2 ( pues no existen picos mınimos ni maximos)
(5.2)
.
V mini y V maxi son vectores que contienen los ındices del histograma Hk, en los cuales
existe un pico mınimo o maximo, respectivamente.
De esta manera son definidos umbralinf = min(V max) y umbralsup = max(V min). Se
calcula finalmente umbralinf y umbralsup de las n observaciones para obtener los umbrales
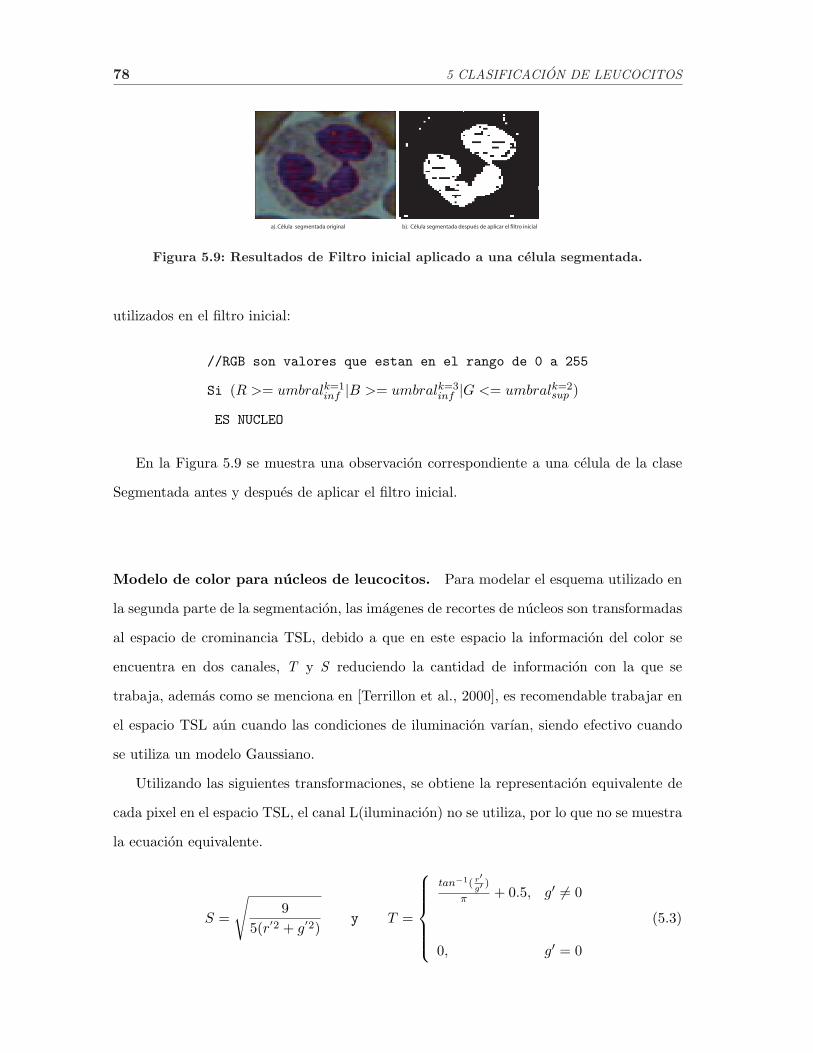
78 5 CLASIFICACION DE LEUCOCITOS
a). Célula segmentada original b). Célula segmentada después de aplicar el filtro inicial
Figura 5.9: Resultados de Filtro inicial aplicado a una celula segmentada.
utilizados en el filtro inicial:
//RGB son valores que estan en el rango de 0 a 255
Si (R >= umbralk=1inf |B >= umbralk=3
inf |G <= umbralk=2sup )
ES NUCLEO
En la Figura 5.9 se muestra una observacion correspondiente a una celula de la clase
Segmentada antes y despues de aplicar el filtro inicial.
Modelo de color para nucleos de leucocitos. Para modelar el esquema utilizado en
la segunda parte de la segmentacion, las imagenes de recortes de nucleos son transformadas
al espacio de crominancia TSL, debido a que en este espacio la informacion del color se
encuentra en dos canales, T y S reduciendo la cantidad de informacion con la que se
trabaja, ademas como se menciona en [Terrillon et al., 2000], es recomendable trabajar en
el espacio TSL aun cuando las condiciones de iluminacion varıan, siendo efectivo cuando
se utiliza un modelo Gaussiano.
Utilizando las siguientes transformaciones, se obtiene la representacion equivalente de
cada pixel en el espacio TSL, el canal L(iluminacion) no se utiliza, por lo que no se muestra
la ecuacion equivalente.
S =
√9
5(r′2 + g′2)y T =
tan−1( r′g′ )
π + 0.5, g′ 6= 0
0, g′ = 0
(5.3)

5.3 Metodo de clasificacion de leucocitos 79
donde
r′=
R
R + G + B− 1/3 y g
′=
G
R + G + B− 1/3 (5.4)
Para representar el color del nucleo, se define una matriz de covarianza CTS , que indica
la relacion de los valores para los canales T y S de la imagen. Para construir la matriz de
covarianza CTS , se considera a T y S como la union de los componentes T y S de cada
observacion, es decir
T li,j → T l
k y Sli,j → Sl
k (5.5)
donde,
k = 642(l − 1) + 64(i− 1) + j
l = 1...354
i = 1...64
j = 1...64
(5.6)
Tambien se obtiene un vector de medias Vm utilizando los canales T y S de las n
observaciones.
Vm =[
Mt Ms
]T
(5.7)
Mt y Ms son escalares que se representan el promedio de los elementos de T y S, res-
pectivamente. La matriz de covarianza queda definida como
CTS =
σ2T σTS
σTS σ2S
(5.8)

80 5 CLASIFICACION DE LEUCOCITOS
donde,
σ2T =∑l
i=1(Ti −Mt)2
σ2S =∑l
i=1(Si −Ms)2
σTS =∑l
i=1(Ti −Mt)(Si −Ms)
(5.9)
La distancia |λ2i,j | del pixel(i,j) al vector Vm se define utilizando como metrica la dis-
tancia de Mahallanobis como sigue.
|λ2i,j | = [Xi,j − Vm]T C−1
TS [Xi,j − Vm] (5.10)
donde, Xi,j = pixeli,j de la imagen obtenida despues de haber aplicado el filtro inicial.
Las barras verticales en |λ2i,j | indican que se trata de un valor positivo, pues como se
menciono en la seccion 3.2.1, una distancia siempre es positiva.
Umbralizacion. Antes de hacer una umbralizacion binaria con |λ2i,j |, esta se normaliza
utilizando la ecuacion utilizada por Tomaz [Tomaz et al., 2003].
disM = 1− λ2i,j
cons(5.11)
donde, cons = 9.
El valor de cons es obtenido experimentalmente. Despues de esta normalizacion, se
umbraliza la region que se obtuvo al aplicar el filtro inicial, considerando como parte del
nucleo a los pixeles cuyo valor es mayor a 0.7. Los resultados de esta primera umbralizacion
se pueden ver en la Figura 5.10, en la que aun pueden distinguirse algunos pixeles que no
forman parte del nucleo.
Finalmente, para eliminar los pixeles aislados que aparecen en la imagen, se aplica un
filtro de mediana con una ventana de 9x9 pixeles.
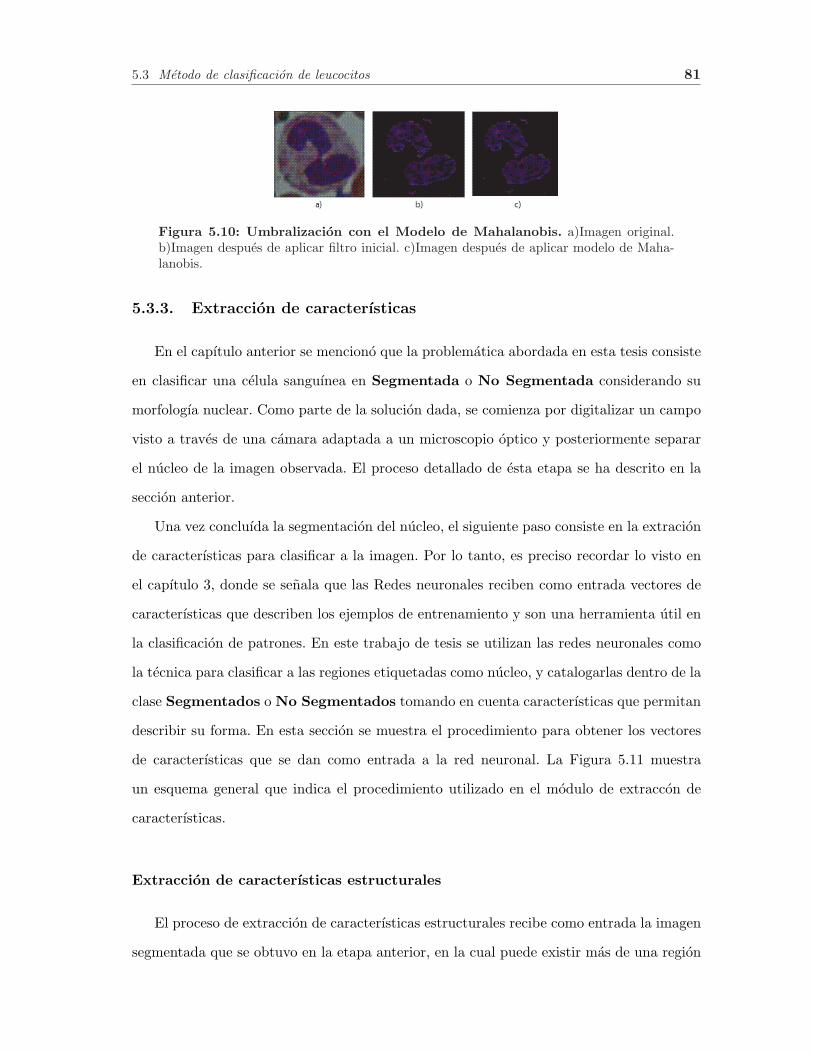
5.3 Metodo de clasificacion de leucocitos 81
Figura 5.10: Umbralizacion con el Modelo de Mahalanobis. a)Imagen original.b)Imagen despues de aplicar filtro inicial. c)Imagen despues de aplicar modelo de Maha-lanobis.
5.3.3. Extraccion de caracterısticas
En el capıtulo anterior se menciono que la problematica abordada en esta tesis consiste
en clasificar una celula sanguınea en Segmentada o No Segmentada considerando su
morfologıa nuclear. Como parte de la solucion dada, se comienza por digitalizar un campo
visto a traves de una camara adaptada a un microscopio optico y posteriormente separar
el nucleo de la imagen observada. El proceso detallado de esta etapa se ha descrito en la
seccion anterior.
Una vez concluıda la segmentacion del nucleo, el siguiente paso consiste en la extracion
de caracterısticas para clasificar a la imagen. Por lo tanto, es preciso recordar lo visto en
el capıtulo 3, donde se senala que las Redes neuronales reciben como entrada vectores de
caracterısticas que describen los ejemplos de entrenamiento y son una herramienta util en
la clasificacion de patrones. En este trabajo de tesis se utilizan las redes neuronales como
la tecnica para clasificar a las regiones etiquetadas como nucleo, y catalogarlas dentro de la
clase Segmentados o No Segmentados tomando en cuenta caracterısticas que permitan
describir su forma. En esta seccion se muestra el procedimiento para obtener los vectores
de caracterısticas que se dan como entrada a la red neuronal. La Figura 5.11 muestra
un esquema general que indica el procedimiento utilizado en el modulo de extraccon de
caracterısticas.
Extraccion de caracterısticas estructurales
El proceso de extraccion de caracterısticas estructurales recibe como entrada la imagen
segmentada que se obtuvo en la etapa anterior, en la cual puede existir mas de una region
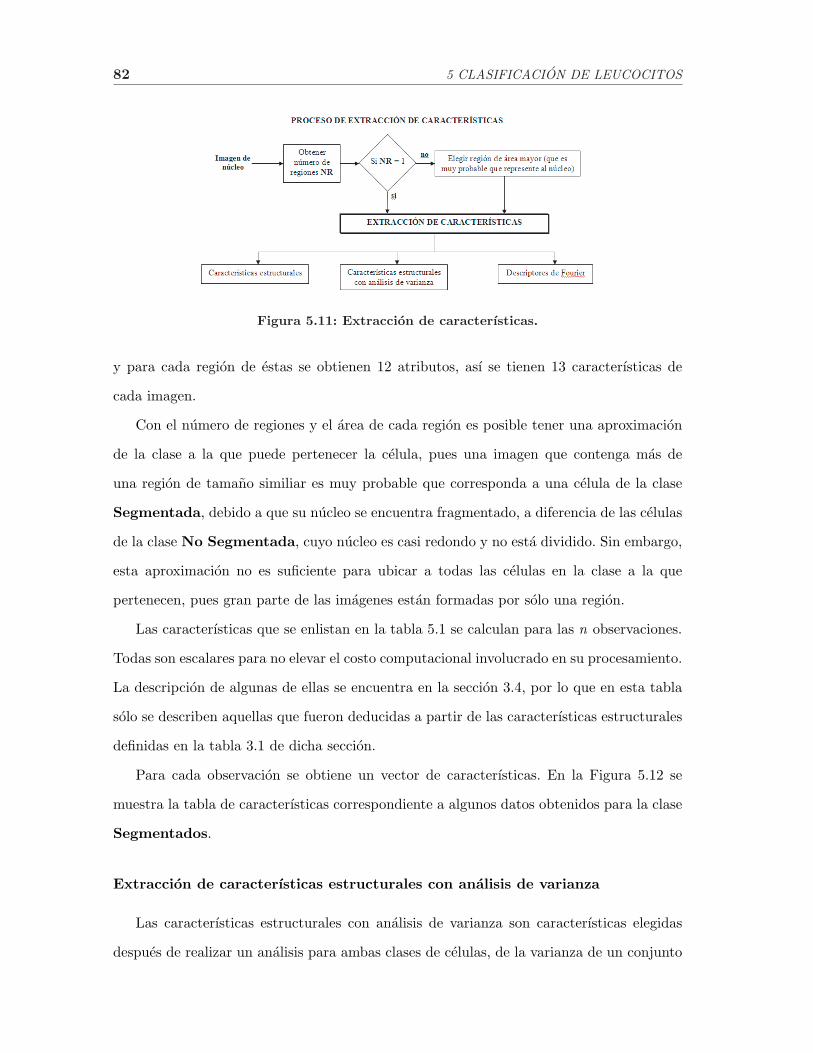
82 5 CLASIFICACION DE LEUCOCITOS
Figura 5.11: Extraccion de caracterısticas.
y para cada region de estas se obtienen 12 atributos, ası se tienen 13 caracterısticas de
cada imagen.
Con el numero de regiones y el area de cada region es posible tener una aproximacion
de la clase a la que puede pertenecer la celula, pues una imagen que contenga mas de
una region de tamano similiar es muy probable que corresponda a una celula de la clase
Segmentada, debido a que su nucleo se encuentra fragmentado, a diferencia de las celulas
de la clase No Segmentada, cuyo nucleo es casi redondo y no esta dividido. Sin embargo,
esta aproximacion no es suficiente para ubicar a todas las celulas en la clase a la que
pertenecen, pues gran parte de las imagenes estan formadas por solo una region.
Las caracterısticas que se enlistan en la tabla 5.1 se calculan para las n observaciones.
Todas son escalares para no elevar el costo computacional involucrado en su procesamiento.
La descripcion de algunas de ellas se encuentra en la seccion 3.4, por lo que en esta tabla
solo se describen aquellas que fueron deducidas a partir de las caracterısticas estructurales
definidas en la tabla 3.1 de dicha seccion.
Para cada observacion se obtiene un vector de caracterısticas. En la Figura 5.12 se
muestra la tabla de caracterısticas correspondiente a algunos datos obtenidos para la clase
Segmentados.
Extraccion de caracterısticas estructurales con analisis de varianza
Las caracterısticas estructurales con analisis de varianza son caracterısticas elegidas
despues de realizar un analisis para ambas clases de celulas, de la varianza de un conjunto
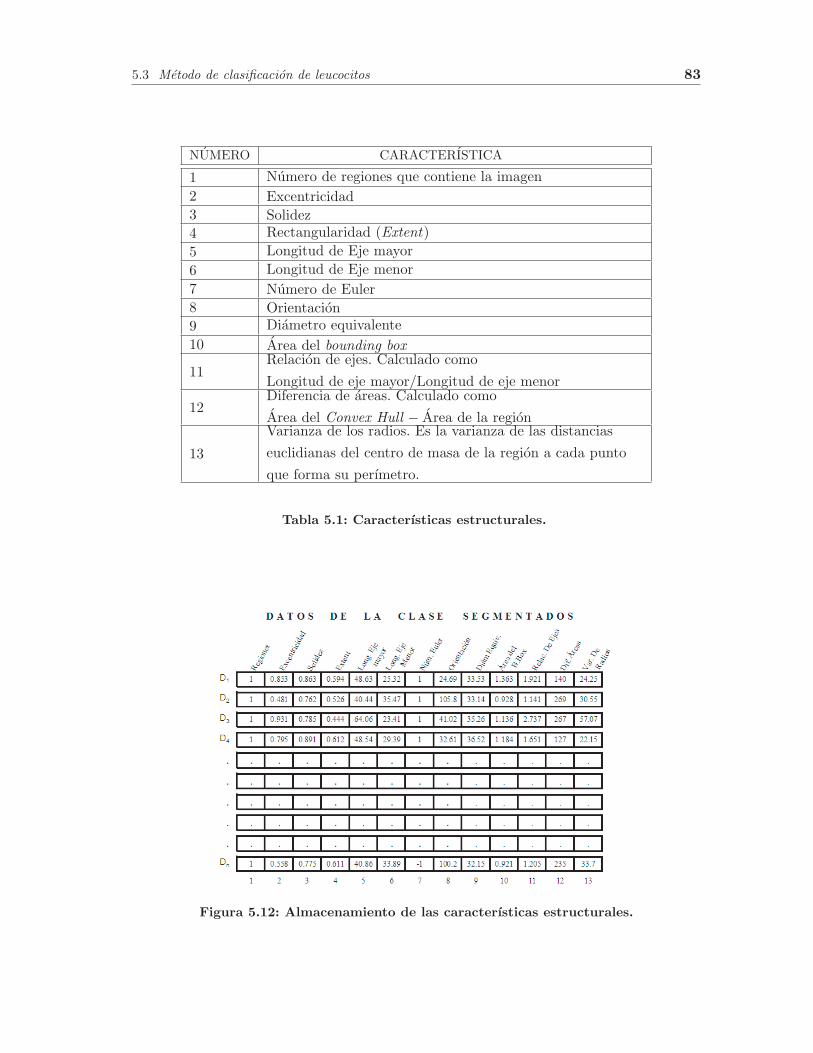
5.3 Metodo de clasificacion de leucocitos 83
NUMERO CARACTERISTICA
1 Numero de regiones que contiene la imagen2 Excentricidad3 Solidez4 Rectangularidad (Extent)5 Longitud de Eje mayor6 Longitud de Eje menor7 Numero de Euler8 Orientacion9 Diametro equivalente10 Area del bounding box
11Relacion de ejes. Calculado comoLongitud de eje mayor/Longitud de eje menor
12Diferencia de areas. Calculado comoArea del Convex Hull − Area de la region
13
Varianza de los radios. Es la varianza de las distanciaseuclidianas del centro de masa de la region a cada puntoque forma su perımetro.
Tabla 5.1: Caracterısticas estructurales.
Figura 5.12: Almacenamiento de las caracterısticas estructurales.

84 5 CLASIFICACION DE LEUCOCITOS
NUMERO CARACTERISTICA
1 Area de la region
2Elongacion (razon de aspecto). Es la cuadratura del B. box.Calculado como Longitud de la base/Longitud de la altura
3 Longitud de Eje mayor4 Longitud de Eje menor5 Relacion de Ejes6 Excentricidad7 Orientacion8 Area del bounding box
9Area vacıa. Calculada comoArea del B.Box−Area de la region
10 Area del Convex Hull11 Numero de Euler12 Diametro equivalente13 Solidez14 Rectangularidad15 Diferencia de Areas16 Numero de regiones17 Varianza de los radios
Tabla 5.2: Caracterısticas estructurales iniciales para el analisis de varianza.
de caracterısticas estructurales.
Las caracterısticas elegidas para el analisis de varianza se presentan en la tabla 5.2,
en la cual solo se definen las caracterısticas que no han sido consideradas en tablas de
caracterısticas ya mostradas.
Las caracterısticas mostradas en la tabla se calculan para todas las observaciones de
cada clase y se almacenan dichos valores en un vector, de tal manera que para cada carac-
terıstica se obtienen 2 vectores (uno para cada clase). Posteriormente se calcula la varianza
de cada vector caracterıstico para ambas clases, con estos valores se obtiene una diferencia
(como valor absoluto).
En la tabla 5.3 se presentan los resultados obtenidos al aplicar el procedimiento an-
tes descrito. Como se puede observar, para cada caracterıstica se muestran 3 columnas:
la primera respresenta la varianza obtenida para las celulas de la clase Segmentadas, la
segunda contiene la informacion referente a la varianza para la clase No segmentadas.
En la tercera columna se muestra la diferencia (como valor absoluto) de los valores

5.3 Metodo de clasificacion de leucocitos 85
CARACTERISTICA V arianzaSeg V arianzaNoSeg Diferencia de varianzas
1. Area de la region 1.5391 2.2133 0.67422. Elongacion 0 0 03. Longitud de Eje mayor 0.0017 0.0011 0.00604. Longitud de Eje menor 0.009 0.009 0.00035. Relacion de Ejes 0 0 06. Excentricidad 0 0 07. Orientacion 0.0264 0.0284 0.01988. Area del bounding box 1.6162 2.2583 0.64219. Area vacıa 0.0061 0.0061 010. Area del Convex Hull 2.4198 2.3072 1.126611. Numero de Euler 0 0 012. Diametro equivalente 0.008 0.0009 0.001413. Solidez 0 0 014. Rectangularidad 0 0 015. Diferencia de Areas 0.2299 0.1029 0.126916. Numero de regiones 0 0 0.000117. Varianza de los radios 0.0010 0.0010 0
Tabla 5.3: Resultados del analisis de varianza para 17 caracterısticas estructu-rales.
encontrados en la primera y segunda columna, para cada una de las 17 caracterısticas
consideradas.
De acuerdo a los resultados observados en la tercera columna, tenemos que el criterio
para la seleccion de las caracterısticas fue descartar a aquellos renglones cuya diferencia
entre ambas clases (tercera columna) sea mayor a 0.0001, considerando una precision de
4 dıgitos en la parte decimal debido a que los valores obtenidos para estas diferencias son
por naturaleza muy pequenos.
La condicion propuesta para la seleccion de caracterısticas es:
Si |V arianzaSeg − V arianzaNoSeg| > 0.0001, entonces
se elige la caracterıstica
en caso contrario
se descarta la caracterıstica
Los resultados obtenidos con este metodo se observan en la tabla 5.4.
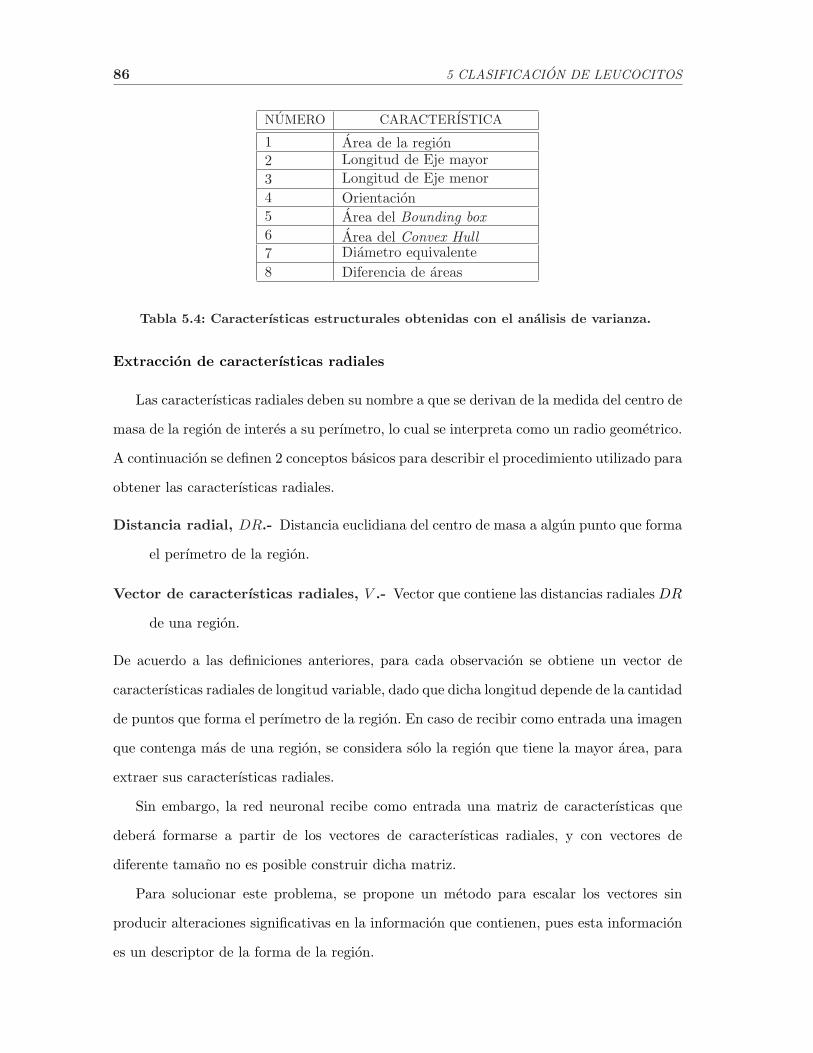
86 5 CLASIFICACION DE LEUCOCITOS
NUMERO CARACTERISTICA
1 Area de la region2 Longitud de Eje mayor3 Longitud de Eje menor4 Orientacion5 Area del Bounding box6 Area del Convex Hull7 Diametro equivalente8 Diferencia de areas
Tabla 5.4: Caracterısticas estructurales obtenidas con el analisis de varianza.
Extraccion de caracterısticas radiales
Las caracterısticas radiales deben su nombre a que se derivan de la medida del centro de
masa de la region de interes a su perımetro, lo cual se interpreta como un radio geometrico.
A continuacion se definen 2 conceptos basicos para describir el procedimiento utilizado para
obtener las caracterısticas radiales.
Distancia radial, DR.- Distancia euclidiana del centro de masa a algun punto que forma
el perımetro de la region.
Vector de caracterısticas radiales, V .- Vector que contiene las distancias radiales DR
de una region.
De acuerdo a las definiciones anteriores, para cada observacion se obtiene un vector de
caracterısticas radiales de longitud variable, dado que dicha longitud depende de la cantidad
de puntos que forma el perımetro de la region. En caso de recibir como entrada una imagen
que contenga mas de una region, se considera solo la region que tiene la mayor area, para
extraer sus caracterısticas radiales.
Sin embargo, la red neuronal recibe como entrada una matriz de caracterısticas que
debera formarse a partir de los vectores de caracterısticas radiales, y con vectores de
diferente tamano no es posible construir dicha matriz.
Para solucionar este problema, se propone un metodo para escalar los vectores sin
producir alteraciones significativas en la informacion que contienen, pues esta informacion
es un descriptor de la forma de la region.
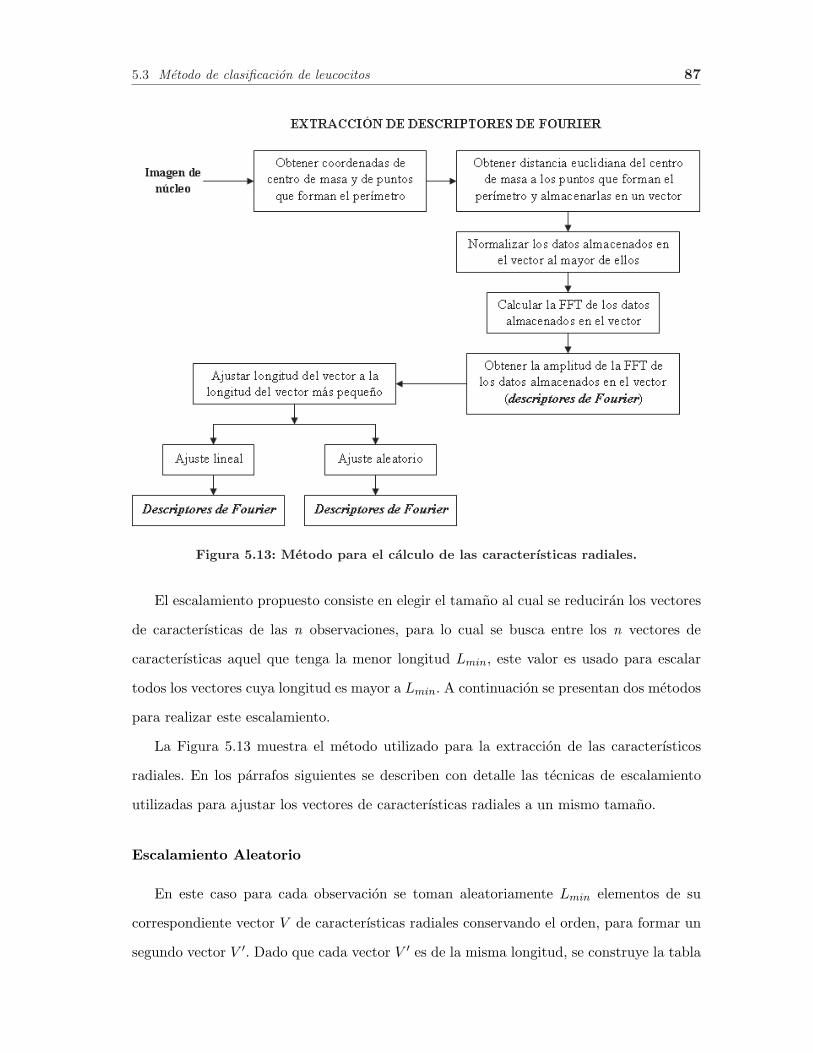
5.3 Metodo de clasificacion de leucocitos 87
Figura 5.13: Metodo para el calculo de las caracterısticas radiales.
El escalamiento propuesto consiste en elegir el tamano al cual se reduciran los vectores
de caracterısticas de las n observaciones, para lo cual se busca entre los n vectores de
caracterısticas aquel que tenga la menor longitud Lmin, este valor es usado para escalar
todos los vectores cuya longitud es mayor a Lmin. A continuacion se presentan dos metodos
para realizar este escalamiento.
La Figura 5.13 muestra el metodo utilizado para la extraccion de las caracterısticos
radiales. En los parrafos siguientes se describen con detalle las tecnicas de escalamiento
utilizadas para ajustar los vectores de caracterısticas radiales a un mismo tamano.
Escalamiento Aleatorio
En este caso para cada observacion se toman aleatoriamente Lmin elementos de su
correspondiente vector V de caracterısticas radiales conservando el orden, para formar un
segundo vector V ′. Dado que cada vector V ′ es de la misma longitud, se construye la tabla

88 5 CLASIFICACION DE LEUCOCITOS
Figura 5.14: Almacenamiento de las caracterısticas radiales obtenidas aleato-riamente.
de caracterısticas al colococar a los vectores V ′1 , V
′2 , V
′3 , ...V
′n como renglones de dicha tabla.
Esto se muestra en la Figura 5.14
Al realizar una seleccion aleatoria de los elementos de V resulta un muestreo no ho-
mogeneo, pues cada vez se eligen diferentes puntos para formar el vector de caracterısticas
radiales.
Escalamiento con Transformacion Lineal
Para obtener una seleccion homogenea de los elementos que forman el vector de carac-
terısticas radiales, se realiza un escalamiento utilizando la siguiente transformacion lineal:
V ′i = b‖ Vj ‖
Lmin∗ ic (5.12)
donde,
i = 1..Lmin
j = 1..n
V ′i = vector de caracterısticas resultante de longitud Lmin
Finalmente se construye una tabla de caracterısticas similar a la que se muestra en la

5.3 Metodo de clasificacion de leucocitos 89
Figura 5.15: Izquierda. Perımetro de un nucleo. Centro. Puntos escogidos para for-mar V ′ en el escalamiento aleatorio. Derecha. Puntos escogidos para formar V ′ en elescalamiento lineal.
Figura 5.16: A la izquierda: Region nuclear de una celula segmentada. A la derecha:Perımetro de la region de la izquierda.
Figura 5.14, en la que cada reglon esta constituıdo por los vectores V ′1 , V
′2 , V
′3 , ...V
′n. En la
Figura 5.15 se muestra el perımetro de una region y las imagenes obtenidas al realizar un
escalamiento aleatorio y un escalamiento lineal.
Propiedades de la Transformada Rapida de Fourier
En la Figura 5.16 se muestra la region nuclear de una observacion y su perımetro. Para
obtener componentes de frecuencia significativos, la funcion se transforma del dominio del
tiempo al dominio de la frecuencia usando la transformada rapida de Fourier. La Figura
5.17 en la parte superior representa el perımetro mostrado en 5.16 en el dominio del tiem-
po, mientras que en la parte inferior se muestra la magnitud de dicho perımetro despues
de aplicar la FFT.
Uno de los principales objetivos en la seleccion de caracterısticas para el entrenamiento
de la red neuronal es evitar variaciones de rotacion, traslacion y escalamiento de las image-
nes. Se utilizan 2 propiedades de la transformada de Fourier para neutralizar los efectos
de rotacion y escala. Estas propiedades son: multiplicacion por una constante y el cambio
del tiempo al dominio de la frecuencia.
En el dominio del tiempo, rotar una funcion significa desplazarla; mientras que el es-

90 5 CLASIFICACION DE LEUCOCITOS
Figura 5.17: Perımetro de la region de interes. Arriba. Representacion del perıme-tro en el dominio del tiempo. Abajo. Representacion del perımetro en el dominio de lafrecuencia, considerando solo la parte de magnitud despues de aplicar la FFT
calamiento la multiplica por una constante, que es el factor de escalamiento.
Dada una funcion de tiempo f(t), la Transformada Rapida de Fourier esta dada por:
z[f(t)] = F (jω) (5.13)
F (jω) =| F (jω) | ejφ (5.14)
donde, | F (jω) | es la amplitud. Ademas si f(t) es multiplicada por una constante A,
se tiene:
z[Af(t)] = AF (jω) (5.15)
AF (jω) = A | F (jω) | ejφ (5.16)
La constante A es el factor escala que afecta la funcion f(t), siempre que una imagen es
capturada bajo diferentes escalas. Para nulificar el efecto de la constante A en la magnitud,
el efecto de A en la funcion f(t) se elimina. Esto se logra al normalizar la funcion f(t). La
5.3 Metodo de clasificacion de leucocitos 91
normalizacion consiste en dividir V ′i por el maximo de los elementos de V ′
i .
La propiedad de desplazamiento en el dominio de la frecuencia elimina los efectos de
rotacion. Sin embargo si alguna imagen es rotada en el dominio del tiempo, resulta en un
cambio de la funcion f(t) por un tiempo t0. La funcion f(t) se convierte en f(t−t0) cuando
la rotacion ocurre. La FFT esta dada por:
z[f(t− t0)] =| F (jω) | ejφ.e−jφt0 (5.17)
z[f(t− t0)] =| F (jω) | ej(φ−ωt0) (5.18)
Solo el componente de fase de la transformada es afectado por la rotacion, por lo tanto
la amplitud, que no se ve afectada por el movimiento resulta util.
El centro de masa se utilizo como el punto de referencia en el calculo de distancias
radiales para eliminar variaciones causadas por los efectos traslacion.
Utilizando estas propiedades de la Transformada de Fourier, se crean los vectores de
caracterısticas considerando que f(t) = V ′i . Como resultado de esta transformacion se
obtiene un conjunto de numeros complejos y se extrae la amplitud o modulo de cada uno
de ellos para formar un nuevo vector de caracterısticas Di. Con este nuevo conjunto de
vectores se construye la tabla de caracterısticas que se muestra en la Figura 5.18.
5.3.4. Entrenamiento de la red
El entrenamiento se realiza con una red neuronal de retropropagacion, la cual requiere
de un problema supervisado, ası la red aprende a clasificar vectores de entrada en clases
definidas por el usuario. En este caso las clases son Segmentados y No Segmentados.
El tipo de aprendizaje por retropropagacion debe su nombre a que los pesos de las neu-
ronas se corrigen primero en la capa de salida, despues en la segunda capa oculta si es
que existe, y al final en la primera capa oculta, es decir en la primera capa que recibe la
informacion directamente de la entrada. La arquitectura de la red neuronal es tal, que la
capa mas interna tiene menos neuronas que las capas externas ya que por experimentacion

92 5 CLASIFICACION DE LEUCOCITOS
Figura 5.18: Almacenamiento de las caracterısticas obtenidas despues de apli-car FFT.
al aumentar el numero de neuronas en las capas ocultas, los resultados no mejoran.
El entrenamiento se realiza de manera independiente con cada conjunto de caracterısti-
cas mostrado en las tablas de las Figuras 5.12 y 5.18. En cada caso la red neuronal tiene
m neuronas de entrada, donde m corresponde al numero de caracterısticas o columnas de
las tablas mostradas en las figuras correspondientes. Los vectores de clases son parame-
tros adicionales que se introducen a la funcion de entrenamiento. La red neuronal tiene 2
neuronas de salida que corresponden a las clases que la red es capaz de reconocer. Para
explicar la manera en que la red neuronal recibe los datos, suponga que la matriz E es la
entrada, y el vector C contiene las etiquetas de las clases a reconocer.
E =
e1,1 e1,2 ..... e1,n
e2,1 e2,2 ..... e2,n
. . ..... .
. . ..... .
em,1 em,2 ..... em,n
C =[
1 2 . . 2
](5.19)
donde, n corresponde al numero de observaciones. Cada columna en la matriz de entra-
da E representa las caracterısticas extraıdas (en forma de vector) para una observacion de
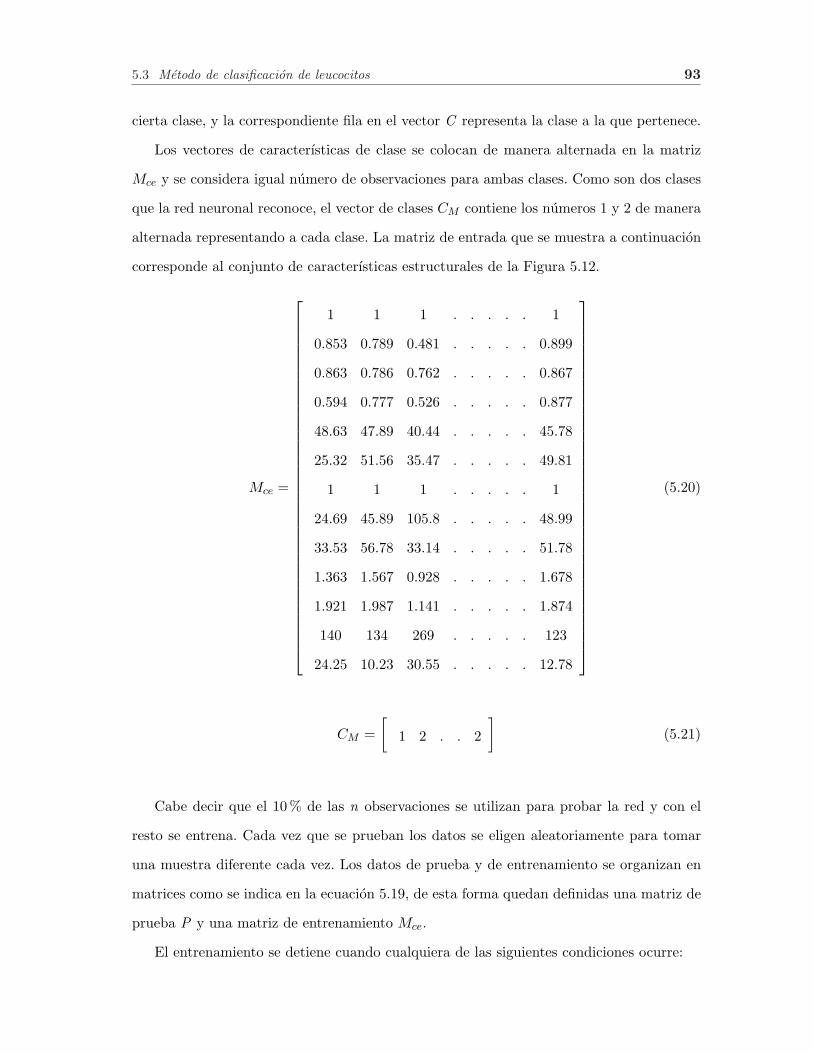
5.3 Metodo de clasificacion de leucocitos 93
cierta clase, y la correspondiente fila en el vector C representa la clase a la que pertenece.
Los vectores de caracterısticas de clase se colocan de manera alternada en la matriz
Mce y se considera igual numero de observaciones para ambas clases. Como son dos clases
que la red neuronal reconoce, el vector de clases CM contiene los numeros 1 y 2 de manera
alternada representando a cada clase. La matriz de entrada que se muestra a continuacion
corresponde al conjunto de caracterısticas estructurales de la Figura 5.12.
Mce =
1 1 1 . . . . . 1
0.853 0.789 0.481 . . . . . 0.899
0.863 0.786 0.762 . . . . . 0.867
0.594 0.777 0.526 . . . . . 0.877
48.63 47.89 40.44 . . . . . 45.78
25.32 51.56 35.47 . . . . . 49.81
1 1 1 . . . . . 1
24.69 45.89 105.8 . . . . . 48.99
33.53 56.78 33.14 . . . . . 51.78
1.363 1.567 0.928 . . . . . 1.678
1.921 1.987 1.141 . . . . . 1.874
140 134 269 . . . . . 123
24.25 10.23 30.55 . . . . . 12.78
(5.20)
CM =[
1 2 . . 2
](5.21)
Cabe decir que el 10% de las n observaciones se utilizan para probar la red y con el
resto se entrena. Cada vez que se prueban los datos se eligen aleatoriamente para tomar
una muestra diferente cada vez. Los datos de prueba y de entrenamiento se organizan en
matrices como se indica en la ecuacion 5.19, de esta forma quedan definidas una matriz de
prueba P y una matriz de entrenamiento Mce.
El entrenamiento se detiene cuando cualquiera de las siguientes condiciones ocurre:
94 5 CLASIFICACION DE LEUCOCITOS
El numero maximo de epocas (repeticiones) sea alcanzado.
La maxima cantidad de tiempo ha sido excedida.
El desempeno ha sido minimizado a la meta.
Como parte de la experimentacion se preprocesan las matrices de caracterısticas con PCA
reduciendo el numero de caracterısticas de entrada, mejorando el ındice de reconocimiento.
Despues de aplicar PCA a las matrices de entrenamiento que se forman a partir de las
tablas de caracterısticas obtenidas, se reduce el numero de caracterısticas y se entrena la
red. Al terminar en entrenamiento la red neuronal se prueba con la matriz de prueba P y
finalmente se comparan las etiquetas separadas de la matriz de prueba (vector CM ) con la
salida obtenida de la red neuronal. Los resultados se contabilizan utilizando una matriz de
confusion2 y se obtiene la precision del clasificador utilizado.
5.3.5. Reconocimiento de observaciones originales
La evaluacion del desempeno de la red neuronal, respecto a precision, desempeno y
fiabilidad se realiza con la tecnica de Ten Fold Cross Validation –Validacion cruzada en
10 particiones–. El metodo consiste en tomar de las n observaciones el 90% para entrenar
y el 10 % para probar. Este procedimiento se repite 10 veces y en cada vez se rotan los
datos para analizar diferentes conjuntos en cada caso. Como resultado de cada prueba se
obtienen un ındice de reconocimiento Ri, al promediar los valores de estos Ri se obtiene
un RT que representa un ındice de precision en los resultados obtenidos.
2Una matriz de confusion indica en su posicion (i, j) el numero de muestras de la clase j asignadaspor el clasificador a la clase i. Esta estructura permite averiguar los pares declases entre los que son masfrecuentes los errores del clasificador.
Capıtulo 6
Pruebas y analisis de resultados
En este capıtulo se muestran los resultados que se obtienen al utilizar la metodologıa
propuesta en la seccion 2.4. Considerando una medida de similitud para el desarrollo del
modelo de segmentacion y al menos tres tecnicas que permiten la extraccion de carac-
terısticas utilizadas como descriptores de forma, en principio se describen los resultados
obtenidos durante la etapa de adquisicion de la imagen y posteriormente en la etapa de
segmentacion.
Despues se comenta el proceso de extraccion de caracterısticas, que se divide en tres
partes. Mostrandose que las caracterısticas estructurales, no son los atributos que descri-
ben de la mejor manera a la forma de la region nuclear.
Finalmente se realiza un analisis comparativo sobre los resultados obtenidos con cada
conjunto de caracterısticas y se muestran los resultados obtenidos en la evaluacion del
desempeno de la red neuronal.
6.1. Pruebas
6.1.1. Adquisicion y preprocesamiento de la imagen
En principio se recolectan los frotis sanguıneos que son analizados por un experto clıni-
co para obtener las observaciones utilizadas en esta tesis. El primer paso para obtener
estos frotis consiste en la recoleccion de muestras de sangre de diferentes pacientes, ca-

96 6 PRUEBAS Y ANALISIS DE RESULTADOS
Figura 6.1: Recoleccion de muestras sanguıneas. Izquierda. Eleccion del paciente.Centro. Extraccion de la sangre. Derecha. Preparacion y tincion del frotis.
talogados como normales. Se toman en cuenta este tipo de pacientes con la finalidad de
disminuir la posibilidad de encontrar celulas anormales (anatomica y morfologicamente)
que generalmente se presentan en patologıas como la leucemia o la anemia, ademas de que
la clasificacion realizada en este trabajo se realiza de acuerdo a las caracterısticas presentes
en celulas normales.
Las muestras biologicas (frotis sanguıneos tenidos para Recuento Diferencial) fueron
proporcionadas por instituciones como los Laboratorios BioDiagnostics, el Banco de san-
gre de Tlaxcala, el Hospital General de Apizaco y el Laboratorio de Citologıa del Instituto
Mexicano del Seguro Social de Tlaxcala. En la Figura 6.1 se presentan las acciones in-
volucradas en la recoleccion y preparacion de las muestras de sangre y que van desde la
eleccion del paciente, hasta la toma de la muestra y la preparacion del frotis realizada por
un experto clınico. El procedimiento detallado para tincion de dicho frotis se comenta en
la seccion 3.1.2.
A pesar de que la cantidad de frotis recolectados con esta tecnica fue de mas de 100,
se utilizaron 85 para la adquisicion de las imagenes dado que por cada muestra se hace un
recorrido obteniendo diferentes imagenes, de tal manera que por cada frotis se digitalizan
entre 3 y 5 imagenes. La digitalizacion de las imagenes se realizo en las instalaciones de los
Laboratorios BioDiagnostics1 con el apoyo de un experto clınico 2 para el reconocimiento
de la celula.
Para digitalizar las imagenes primero se monto la camara al microscopio, como se ob-
serva en la Figura 5.3. Para enfocar un campo en el microscopio se coloco una gota de
aceite de inmersion sobre el frotis sanguıneo, que despues es colocado sobre la base del
1Laboratorio clınico particular ubicado en la Cd. de Apizaco, Tlax.2Q.F.B. Gonzalo Romero Tirso.

6.1 Pruebas 97
Figura 6.2: Adquisicion de las observaciones. Izquierda: Gota de aceite sobre elfrotis. Centro: Colocacion del frotis sobre la base del microscopio. Derecha: Campo vistoa traves de la camara.
Figura 6.3: Campos vistos al microscopio con diferentes aumentos. Izquierda:Utilizando el objetivo de 40X. Derecha: Utilizando el objetivo de 100X.
portaobjetos acercandolo de tal manera que exista contacto fısico con el objetivo 100X del
microscopio. Esta secuencia de pasos se observa en la Figura 6.2.
Para la adquisicion de las imagenes se trabajo con el objetivo 100X dado que se distin-
guen mejor las caracterısticas de la celula, en la Figura 6.3 se puede apreciar la diferencia
al enfocar un campo visto con el objetivo 40X y otro al cambiar al objetivo 100X.
Los tipos de celulas observadas pertenecen a 2 clases principales: Segmentados y No
Segmentados. Cada clase tiene subtipos, sin embargo la forma de su nucleo es represen-
tativa de cada una. Las celulas que pertenecen a la clase Segmentados se caracterizan
por tener un nucleo deforme, mientras que las celulas de la clase No Segmentados pre-
sentan un nucleo de forma redondeada. En la Figura 6.4, se muestran los subtipos basicos
de celulas Segmentadas y No Segmentadas.
En cada campo observado a traves de la camara se visualiza al menos una celula de
interes como se aprecia en la parte derecha de la Figura 6.3; de este campo se recorta
manualmente el area que encierra a la celula de interes, con lo cual se obtienen imagenes
como las que aparecen en la Figura 6.4, de este modo se adquieren 354 observaciones que
pertenecen a los tipos senalados en la Figura 6.5.
Es importante hacer notar que el tipo de celula llamado basofilo no se incluye en las

98 6 PRUEBAS Y ANALISIS DE RESULTADOS
Figura 6.4: Tipos de globulos blancos. Arriba.- Segmentados: Neutrofilo, Eosinofilo,Basofilo. Abajo.- No Segmentados: Linfocito y monocito.
Figura 6.5: Globulos blancos digitalizados.
observaciones porque es un tipo poco comun y difıcil de identificar, ademas de los pocos
basofilos que fueron identificados por el experto clınico la mayorıa presentaron deforma-
ciones o estaban parcialmente destruıdos; sin embargo se puede observar uno de ellos en
la parte superior derecha de la Figura 6.4. Por otra parte, debido a que en el modelo
utilizado en la etapa de segmentacion se utilizan recortes de nucleo celular, de cada ob-
servacion se recorta manualmente parte del nucleo correspondiente adquiriendo con esto
354 observaciones de recortes de nucleos celulares, en la Figura 6.6 se muestra un ejemplo.
Las observaciones de celulas completas y de recortes de nucleo se escalan a un tamano de
64x64 pixeles para su procesamiento posterior.
6.1.2. Segmentacion de la imagen
Utilizando las 354 observaciones de celulas completas y recortes de nucleos de la celula
encontrada en dicha observacion se construye un modelo basado en color para segmentar
el nucleo de la imagen. Debido a que los tonos morados que presentan los nucleos permiten
diferenciar claramente a cada uno, se adecuo el modelo propuesto por [Tomaz et al., 2003]

6.1 Pruebas 99
Figura 6.6: Recorte de nucleo de una celula de la clase Segmentada.
disenado originalmente para segmentar piel, que se describio en la seccion 4.3.
Para ahorrar recursos computacionales y facilitar el proceso de segmentacion se di-
seno un filtro inicial obtenido experimentalmente al observar las caracterısticas de color
en el espacio de color RGB pertenecientes los recortes de nucleo. Los histogramas de los
canales R, G y B correspondientes a los recortes de nucleo de algunas observaciones se
muestran en la Figura 6.7, donde se aprecia que la cantidad de color verde es pequena en
relacion al rojo y al azul. Debido a que los histogramas obtenidos para cada canal presen-
tan una curva caracterıstica, se utilizan 5.1 y 5.2 para determinar los puntos donde dicha
curva comienza y termina de crecer. Con los umbrales obtenidos de esta manera umbralinf
y umbralsup se eliminan la mayor parte de los pixeles que no pertenecen al nucleo. Los
resultados obtenidos despues de hacer esta umbralizacion se observan en la Figura 6.8.
El filtro inicial aplicado a las imagenes mas claras produce resultados como los que se
muestran en la Figura 6.9, mientras que al aplicarse a imagenes obscuras se obtienen los
resultados mostrados en la Figura 6.10, donde como se puede observar la segmentacion no
es buena, pues el nucleo se encuentra parcial o totalmente oculto.
Tambien se hicieron pruebas a imagenes de celulas semi-destruıdas, no importando lo
claro u obscuro que estas sean. Los resultados de estas pruebas se muestran en la Figura
6.11. Un pequeno subconjunto de la clase segmentados presenta un nucleo muy dividi-
do, cuando se aplica sobre este tipo el filtro se obtienen los resultados que aparecen en la
Figura 6.12.
Despues de observar los efectos de la aplicacion de este primer filtro, a continuacion se
muestran los resultados conseguidos durante el diseno y uso del segundo filtro, que como
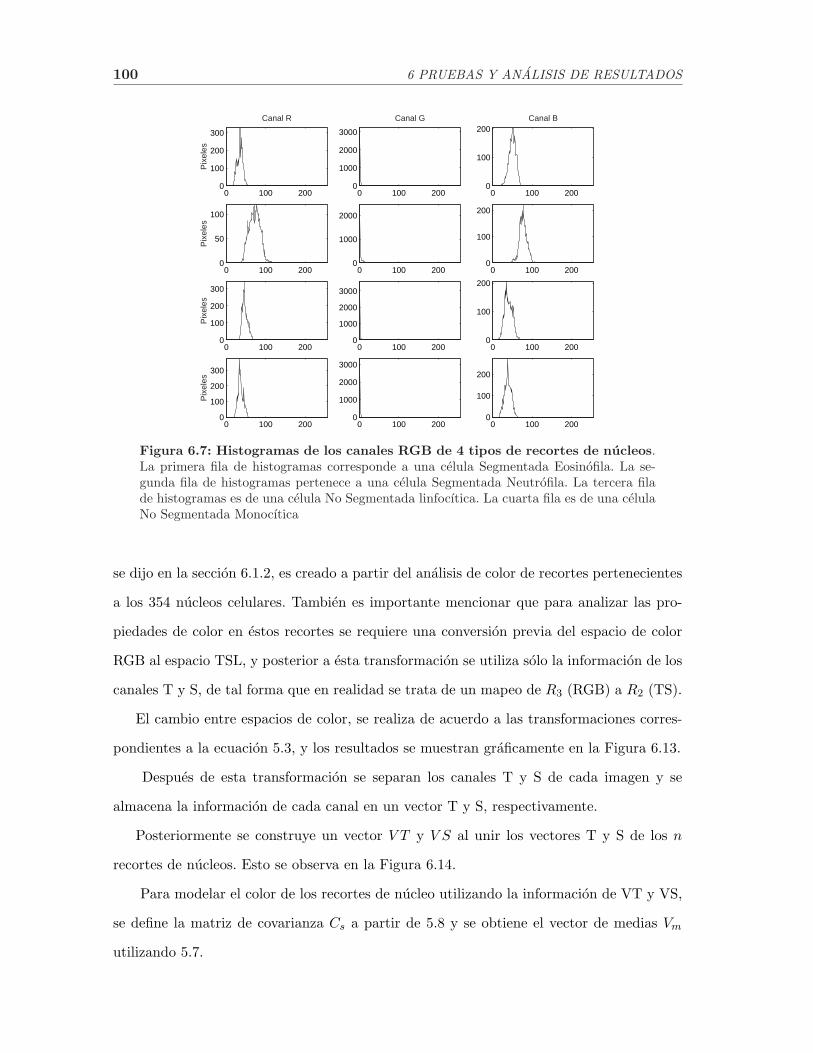
100 6 PRUEBAS Y ANALISIS DE RESULTADOS
0 100 2000
100
200
300
Pix
eles
Canal R
0 100 2000
1000
2000
3000
Canal G
0 100 2000
100
200Canal B
0 100 2000
50
100P
ixel
es
0 100 2000
1000
2000
0 100 2000
100
200
0 100 2000
100
200
300
Pix
eles
0 100 2000
1000
2000
3000
0 100 2000
100
200
0 100 2000
100
200
300
Pix
eles
0 100 2000
1000
2000
3000
0 100 2000
100
200
Figura 6.7: Histogramas de los canales RGB de 4 tipos de recortes de nucleos.La primera fila de histogramas corresponde a una celula Segmentada Eosinofila. La se-gunda fila de histogramas pertenece a una celula Segmentada Neutrofila. La tercera filade histogramas es de una celula No Segmentada linfocıtica. La cuarta fila es de una celulaNo Segmentada Monocıtica
se dijo en la seccion 6.1.2, es creado a partir del analisis de color de recortes pertenecientes
a los 354 nucleos celulares. Tambien es importante mencionar que para analizar las pro-
piedades de color en estos recortes se requiere una conversion previa del espacio de color
RGB al espacio TSL, y posterior a esta transformacion se utiliza solo la informacion de los
canales T y S, de tal forma que en realidad se trata de un mapeo de R3 (RGB) a R2 (TS).
El cambio entre espacios de color, se realiza de acuerdo a las transformaciones corres-
pondientes a la ecuacion 5.3, y los resultados se muestran graficamente en la Figura 6.13.
Despues de esta transformacion se separan los canales T y S de cada imagen y se
almacena la informacion de cada canal en un vector T y S, respectivamente.
Posteriormente se construye un vector V T y V S al unir los vectores T y S de los n
recortes de nucleos. Esto se observa en la Figura 6.14.
Para modelar el color de los recortes de nucleo utilizando la informacion de VT y VS,
se define la matriz de covarianza Cs a partir de 5.8 y se obtiene el vector de medias Vm
utilizando 5.7.

6.1 Pruebas 101
Figura 6.8: Resultados del filtro inicial. a).- Celula Segmentada Eosinofila. b).-Celula Segmentada Neutrofila. c).- Celula No Segmentada linfocıtica. d).- Celula NoSegmentada Monocıtica
Figura 6.9: Resultados del filtro inicial aplicado a imagenes muy claras. a).-Celula No Segmentada Monocıtica. b).- Celula Segmentada Neutrofila. c) y d) CelulasSegmentadas eosinofila.
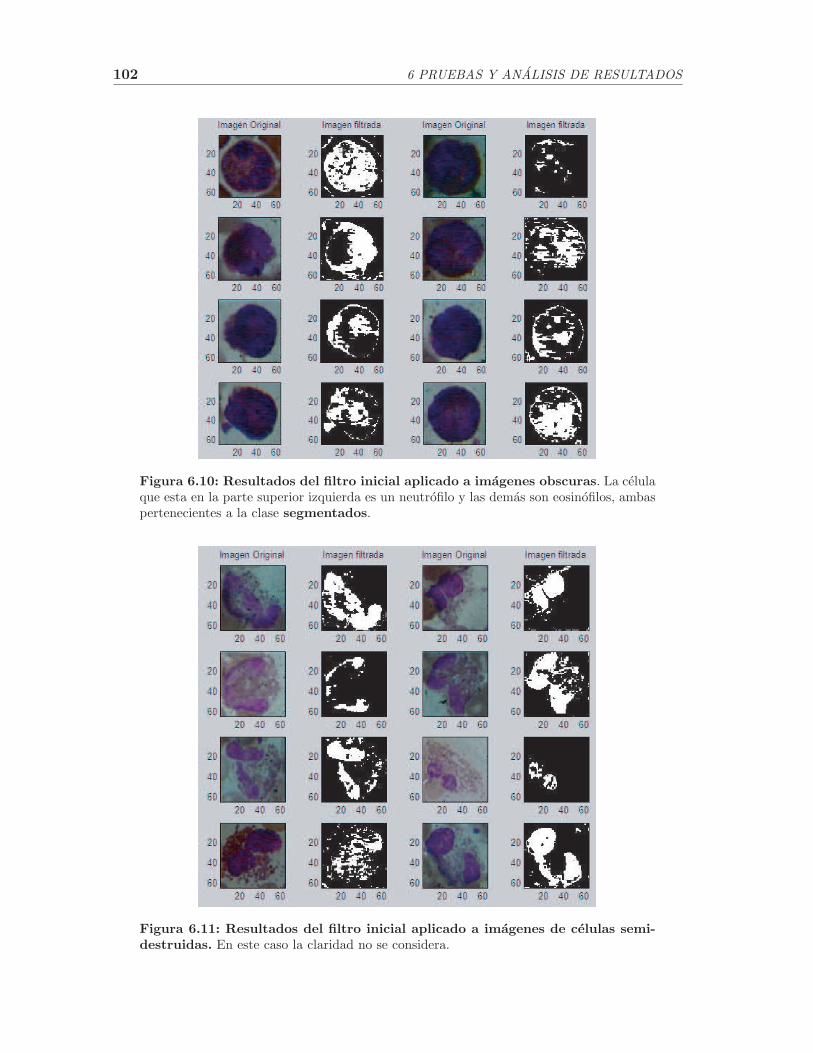
102 6 PRUEBAS Y ANALISIS DE RESULTADOS
Figura 6.10: Resultados del filtro inicial aplicado a imagenes obscuras. La celulaque esta en la parte superior izquierda es un neutrofilo y las demas son eosinofilos, ambaspertenecientes a la clase segmentados.
Figura 6.11: Resultados del filtro inicial aplicado a imagenes de celulas semi-destruidas. En este caso la claridad no se considera.
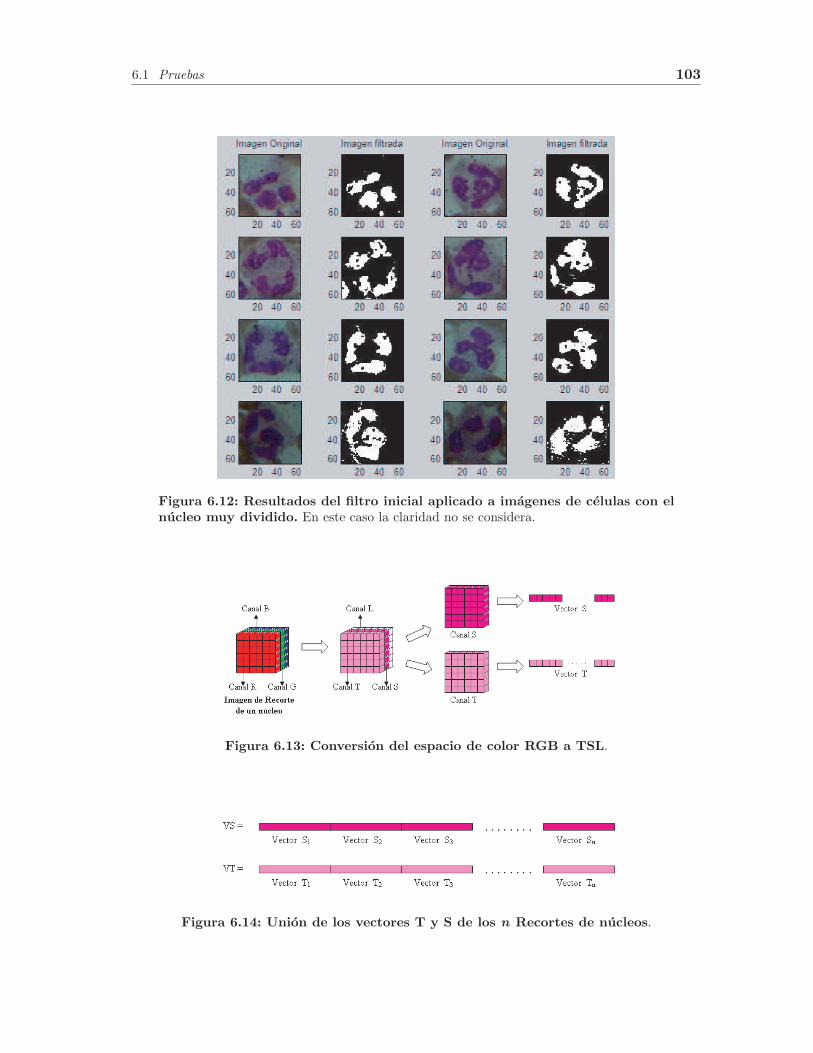
6.1 Pruebas 103
Figura 6.12: Resultados del filtro inicial aplicado a imagenes de celulas con elnucleo muy dividido. En este caso la claridad no se considera.
Figura 6.13: Conversion del espacio de color RGB a TSL.
Figura 6.14: Union de los vectores T y S de los n Recortes de nucleos.

104 6 PRUEBAS Y ANALISIS DE RESULTADOS
A continuacion se muestran los vectores VT y VS correspondientes a los recortes de
nucleos de las 354 obervaciones.
V T =[
0.3371 0.3371 0.3371 0.3375 0.3382 0.3382 0.3430 0.3477 ... 0.3481
]
V S =[
3.6535 3.6535 3.6535 3.6522 3.5163 3.5163 3.5452 3.5731 ... 3.5750
]
La matriz de covarianza Cs y el vector de medias Vm que se obtienen con los vectores
anteriores son:
Cs =
0.0001 −0.0214
−0.0214 5.8557
(6.1)
Vm =[
0.0922 22.8193
]T
(6.2)
Para medir la similitud entre 2 pixeles,uno que pertenece a la imagen que recibe el filtro
y otro que forma parte de un recorte de nucleo y definir un umbral que clasifique al primero
de ellos como nucleo se utiliza la metrica de la Distancia de Mahalanobis |λ2i,j | definida por
la ecuacion 5.10. Esta metrica es util debido a que toma en cuenta la correlacion entre las
variables multidimensionales que se consideran en este trabajo, el Tono y la Saturacion. En
la Figura 6.15 se muestra la correlacion que existe entre los vectores Tono T y Saturacion
S.
De esta manera |λ2i,j | esta definida como una matriz que contiene las medidas de
similitud de cada pixel pixel(i,j) de la imagen a filtrar al vector de medias Vm. Para definir el
umbral primero se normaliza el valor de |λ2i,j | utilizando 5.11. Despues de esta normalizacion
se define el umbral para decidir si el pixel(i,j) forma parte del nucleo, es decir,
Si |λ2i,j | > 0.7 entonces pixel(i,j) = NUCLEO (6.3)
El valor de 0.7 se obtuvo por experimentacion considerando que una distancia de 1.0
representa un pixel que no pertenece al nucleo.
Para eliminar los pixeles que aun permanecen de forma aislada en la imagen, se aplica

6.1 Pruebas 105
Figura 6.15: Correlacion entre las variables Tono y Saturacion correspondien-tes a los vectores T y S, respectivamente. Los valores de T son normalizados.
Imagen Original
20 40 60
20
40
60
Filtro inicial
20 40 60
20
40
60
F. de Mahalanobis
20 40 60
20
40
60
F. de la mediana
20 40 60
20
40
60
Figura 6.16: Resultados de la segmentacion del nucleo de un monocito.
un filtro de mediana utilizando una ventana de 9x9 pixeles. El tamano de la ventana se
eligio despues de probar con otros tamanos y observar que este tamano elimina la mayor
cantidad de pixeles aislados sin afectar significativamente la forma de la region filtrada.
En la figura 6.16 se muestran los resultados de la etapa de segmentacion para un tipo de
celula no segmentada.
6.1.3. Extraccion de caracterısticas
Como se ha mencionado en capıtulos anteriores, la extraccion de caracterısticas es muy
importante en el proceso de identificacion de los objetos de interes, en este trabajo los
objetos de interes son los nucleos celulares.

106 6 PRUEBAS Y ANALISIS DE RESULTADOS
El analisis que se realizo a la imagen en la seccion 6.1.2, permitio extraer la region que
corresponde al nucleo de la celula sin afectar significativamente su forma.
La extraccion de caracterısticas se realiza tomando como entrada la imagen obteni-
da en la seccion anterior, sin embargo en algunos casos aun despues de aplicar los filtros
senalados se obtienen imagenes que contienen mas de una region etiquetada como nucleo.
En estos casos, la region que se considera para extraer las caracterısticas es la que presenta
una mayor area.
La cantidad de observaciones que se utilizaron para construir las matrices de carac-
terısticas estructurales, estructurales con analisis de varianza y radiales fue de 220; 110
para cada tipo de celula, esto es debido a que se cuenta con 232 ejemplares de la clase
Segmentados, casi el doble que para las celulas del tipo No segmentados cuyo numero
es de 122.
Como se menciona en [Katz, 2000], para evitar un sobreentrenamiento de la red hacia
una clase especıfica se considera igual numero de ejemplares.
Los resultados contemplan 3 tipos de experimentos fundamentales. En cada caso se
trata del uso de un conjunto distinto de caracterısticas para describir la forma de la region
nuclear. El primer experimento esta enfocado al uso de las caracterısticas estructurales, el
segundo utiliza caracterısticas estructurales con analisis de varianza y el tercero se realiza
con las caracterısticas radiales, siendo estas ultimas mucho mas en numero que las estruc-
turales.
En el primer experimento se considera el conjunto de 13 caracterısticas estructurales
que se muestran en la Figura 5.12, entre las que se encuentran: numero de regiones, eccen-
tricidad, solidez, extremos de la imagen, longitud del eje mayor, longitud del eje menor,
numero de Euler, orientacion, diametro equivalente, area del bounding box, relacion de ejes,
diferencia de areas y varianza de los radios.
Con estos atributos, la matriz de caracterısticas que se obtiene es la que se muestra
en la Figura 6.17, donde el acomodo de las caracterısticas para cada clase se realiza de
manera intercalada denotandose como S a la clase Segmentados y como N a la clase
No Segmentados. Esta es la matriz de caracterısticas estructurales utilizada en el primer

6.1 Pruebas 107
Figura 6.17: Matriz de caracterısticas estructurales. Las columnas denotadas conSi representan a las caracterısticas de celulas Segmentadas mientras que las que sedenotan con Ni indican a las caracterısticas de celulas No Segmentadas.
experimento.
Como prueba adicional, se obtiene un nuevo conjunto reducido de caracterısticas es-
tructurales al aplicar la tecnica de PCA descrita en la seccion 3.2.2. Despues de reducir
la matriz de caracterısticas estructurales mostrada en la Figura 6.17, disminuyen a 8 los
atributos3 con los que se construye una nueva matriz de caracterısticas estructurales.
El segundo experimento esta encaminado hacia el uso de lo que en este trabajo se han
denominado caracterısticas estructurales con analisis de varianza, obtenidas en la seccion
5.3.3. Este conjunto de 8 caracterısticas se muestran en la tabla 5.4 e incluye las siguien-
tes: area de la region, longitud de eje mayor, longitud de eje menor, orientacion, area de
Bounding Box, area del Convex Hull, diametro equivalente y diferencia de areas. Con estas
caracterısticas y de forma similar a como se hizo en el primer experimento, se construye la
matriz de caracterısticas estructurales con analisis de varianza (ver Figura 6.18).
En este caso tambien se aplico PCA al conjunto de 8 caracterısticas estructurales con
analisis de varianza, obteniendo un nuevo conjunto de solo 4 atributos (componentes prin-
cipales).
3en realidad se trata de 8 componentes principales, ya que PCA al reducir no permite conocer cualesfueron las caracterısticas seleccionadas.

108 6 PRUEBAS Y ANALISIS DE RESULTADOS
Figura 6.18: Matriz de caracterısticas estructurales con analisis de varianza.
El tercer experimento utiliza 2 conjuntos distintos de 111 caracterısticas radiales, dado
que para construir la matriz de caracterısticas es necesario tener igual numero de atributos
para las 354 observaciones. El problema en el caso de las caracterısticas radiales, es que
existen un numero distinto de caracterısticas para cada observacion, por lo cual se utilizan
dos formas de escalar el numero de atributos a el valor mınimo de caracterısticas encon-
trado en las 354 observaciones, que es de 111.
De esta manera, al utilizar las 2 formas de escalamiento descritas en la seccion 5.3.3:
escalamiento aleatorio y escalamiento con transformacion lineal, se obtienen 2 conjuntos
de caracterısticas radiales.
Utilizando el procedimiento descrito en el primer experimento para la construccion de
la matriz se caracterısticas, se obtienen las matrices de caracterısticas radiales, una para
cada tipo de escalamiento. En la Figura 6.19 se observa la estructura de la matriz de ca-
racterısticas radiales, en la cual se utiliza un escalamiento con trasformacion lineal.
Del mismo modo que en experimentos anteriores, se aplica PCA a las matrices de
caracterısticas radiales para construir nuevas matrices de caracterısticas reducidas. Esta
prueba permite evaluar tambien a cada conjunto de caracterısticas radiales, generadas con
distintas formas de escalamiento.
Es de esperarse que las caracterısticas estructurales describan de una mejor manera
la forma de las region nuclear. Sin embargo este no es el caso, como se comenta en las
secciones siguientes.

6.1 Pruebas 109
Figura 6.19: Matriz de caracterısticas radiales utilizando escalamiento contransformacion lineal.
6.1.4. Entrenamiento de la Red Neuronal
Para entrenar a la red neuronal con los subconjuntos de caracterısticas obtenidos en la
seccion anterior se probaron distintas funciones para entrenamiento y funciones de trans-
ferencia, las cuales se muestran en la Figura 6.20, obteniendo un mejor desempeno con
el gradiente escalado conjugado y la funcion de transferencia logsig. El conjunto de carac-
terısticas utilizadas para esta prueba, corresponde a las caracterısticas estructurales con
analisis de varianza. En la tabla 5.4 se enlistan dichas caracterısticas .
De las 354 observaciones que se obtuvieron, se utiliza igual numero de cada clase para
la experimentacion, en este caso 110 de cada tipo, dejando el resto para pruebas adicio-
nales. Cabe hacer notar que las pruebas suplementarias se realizan con diferente numero
de muestras para cada clase, ya que no se cuenta con igual numero de muestras para cada
tipo de leucocito, ademas de que se trata de ejemplares no utilizados durante la fase de
entrenamiento. Las muestras utilizadas para pruebas adicionales son 134, de las cuales 122
son de la clase Segmentados y 22 de la clase No segmentados.
De las 110 observaciones obtenidas para cada clase, la red neuronal se entrena con 9/10,
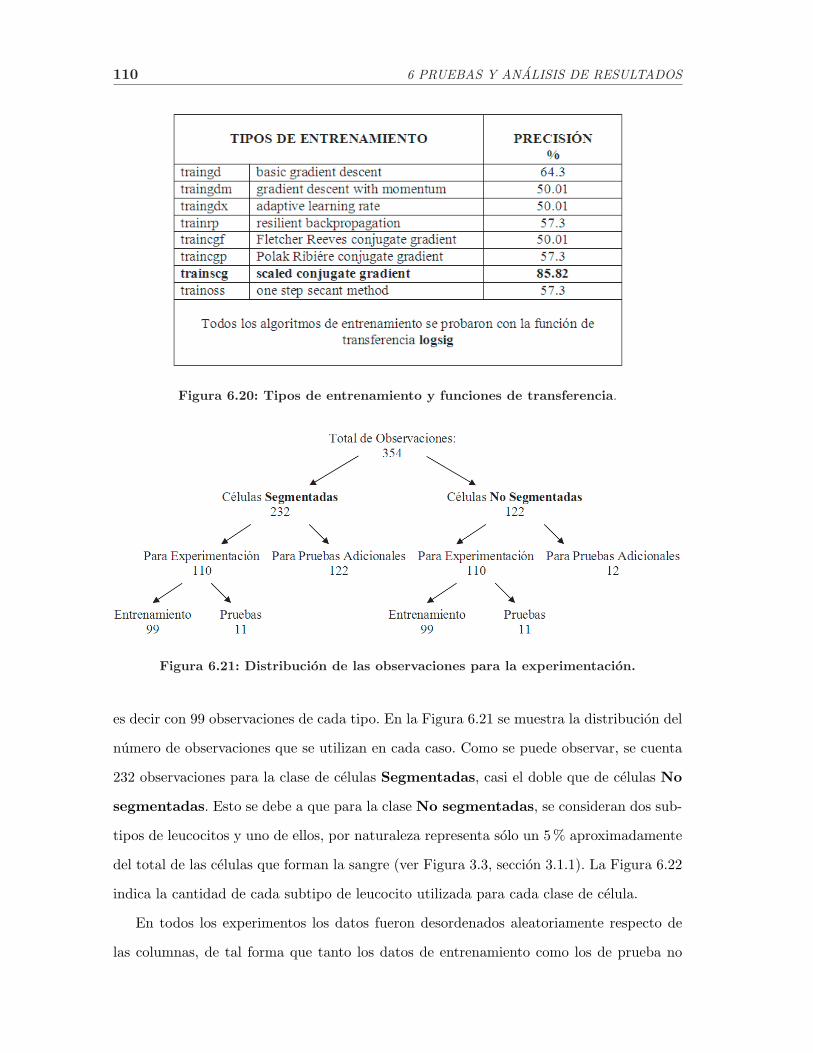
110 6 PRUEBAS Y ANALISIS DE RESULTADOS
Figura 6.20: Tipos de entrenamiento y funciones de transferencia.
Figura 6.21: Distribucion de las observaciones para la experimentacion.
es decir con 99 observaciones de cada tipo. En la Figura 6.21 se muestra la distribucion del
numero de observaciones que se utilizan en cada caso. Como se puede observar, se cuenta
232 observaciones para la clase de celulas Segmentadas, casi el doble que de celulas No
segmentadas. Esto se debe a que para la clase No segmentadas, se consideran dos sub-
tipos de leucocitos y uno de ellos, por naturaleza representa solo un 5 % aproximadamente
del total de las celulas que forman la sangre (ver Figura 3.3, seccion 3.1.1). La Figura 6.22
indica la cantidad de cada subtipo de leucocito utilizada para cada clase de celula.
En todos los experimentos los datos fueron desordenados aleatoriamente respecto de
las columnas, de tal forma que tanto los datos de entrenamiento como los de prueba no

6.1 Pruebas 111
Figura 6.22: Distribucion de las observaciones por clase.
posean caracterısticas particulares que pudieran influir en los resultados. Ademas, para
validar el desempeno de la red se utilizo la tecnica de Ten Fold Cross Validation –TFCV–,
tomando 10% de las 110 observaciones de cada clase para prueba y el 90 % restante para
entrenamiento.
De esta manera, en el primer experimento con 13 caracterısticas estructurales la ma-
triz de caracterısticas es de 13x99, mientras que para las pruebas se utiliza una matriz de
13x11, es decir 99 datos para entrenamiento y 11 para prueba. Cuando se aplica reduccion
con PCA se obtienen 8 componentes principales, con los cuales se entrena a la red.
Las pruebas adicionales realizadas como parte de este primer experimento se realizan
con 122 datos de la clase Segmentados y 12 datos de la clase No segmentados arrojando
un ındice de reconocimiento de 81.34% cuando se aplica PCA antes de entrenar a la red
neuronal y 76.11% cuando no se aplica. Notese que estos datos son totalmente distintos a
los utilizados durante el entrenamiento.
El segundo experimento hace uso de 8 caracterısticas estructurales con analisis de va-
rianza, de tal manera que la matriz de caracterısticas de entrada es de 8x99, y la de prueba
de 8x11.
De igual forma que en el primer experimento, se prueba tambien con otro conjunto
de caracterısticas que se obtienen al reducir con PCA; en este caso la reduccion genera
4 componentes principales. Sin embargo, en este caso los resultados no mejoran como se
puede ver en la Figura 6.23.
Por otro lado, las pruebas realizadas con los 134 ejemplares separados en un principio

112 6 PRUEBAS Y ANALISIS DE RESULTADOS
Figura 6.23: Resultados de las configuraciones utilizando diferentes observa-ciones de celulas Segmentadas y No Segmentadas.
arrojan un 79.85% cuando no se aplica PCA y un 67.16 % cuando se utiliza reduccion.
En el tercer experimento se utilizan las caracterısticas radiales considerando una ma-
triz de caracterısticas de 111x99, dejando para prueba una matriz de 111x11 datos. En un
primer caso, se entrena con las caracterısticas que se obtuvieron al hacer un escalamiento
aleatorio, mientras que en otro caso se entrena con las caracterısticas generadas al realizar
un escalamiento con transformacion lineal.
Las pruebas adicionales realizadas como parte de este tercer experimento para los 2
grupos de caracterısticas: las extraıdas con escalamiento aleatorio y las extraıdas con esca-
lamiento lineal, se realizan igualmente con 122 datos de la clase Segmentados y 12 datos
de la clase No segmentados arrojando un ındice de reconocimiento de 100.00% cuando
se aplica PCA antes de entrenar a la red neuronal y 100.00 % cuando no se aplica para
ambos grupos de caracterısticas.
Los resultados que se obtienen despues de los entrenamientos realizados en los 3 expe-
rimentos se muestran en la Figura 6.23.
Como se puede observar, los mejores ındices de reconocimiento se obtienen cuando
se utilizan como descriptores de forma a las caracterısticas radiales aplicando PCA antes
de entrenar la red. La grafica del comportamiento en el entrenamiento se puede ver en la
Figura 6.24.
Es importante decir que los resultados mostrados en la Figura 6.24 corresponden al
promedio de 10 pruebas realizadas con la tecnica TFCV para cada caso, ademas que la

6.2 Analisis de resultados 113
100
102
104
10−10
10−5
100
105
1010
−101
ENTRENAMIENTO CON CARACTERISTICAS ESTRUCTURALES
EPOCAS
ER
RO
R
sin PCAcon PCA
Figura 6.24: Comportamiento de entrenamiento utilizando diferentes observa-ciones de celulas Segmentadas y No Segmentadas con caracterısticas estruc-turales y radiales.
seleccion de las 110 observaciones utilizadas en los experimentos respectivos es aleatoria
para cada una de las 10 veces que se realizo la tecnica de TFCV.
6.2. Analisis de resultados
Retomando el diagrama mostrado en la Figura 5.1, se pueden realizar algunos comen-
tarios para cada fase del metodo usado para la identificacion y clasificacion de leucocitos.
Los resultados obtenidos en la fase de adquisicion de las muestras son satisfactorios,
dado que la calidad de las imagenes es buena para el analisis propuesto, pues en todas ellas
es posible diferenciar claramente al nucleo del resto de la escena.
La tecnica de segmentacion utilizada es buena. Permitio extraer los nucleos celulares sin
afectar su forma significativamente. Al utilizar la distancia de Mahalanobis como medida
de similitud, se logro calcular la diferencia del color del nucleo de un leucocito, respecto
al color promedio de los nucleos de un conjunto de 354 leucocitos utilizados en la fase de
experimentacion. Por otro lado, con el uso de esta metrica es posible considerar la correla-
cion que existe en los canales T y S, que se utilizaron para modelar el color caracterıstico
del nucleo de los leucocitos.
Despues de hacer un analisis visual de las imagenes se observo que la aplicacion del filtro

114 6 PRUEBAS Y ANALISIS DE RESULTADOS
inicial se puede omitir, dado que al aplicar el filtro creado con el modelo de Mahalanobis
los resultados son buenos.
Como consecuencia de una buena segmentacion se extrajeron caracterısticas que per-
miten clasificar adecuadamente a la celula como leucocito Segmentado o leucocito No
segmentado.
Respecto a la extraccion y seleccion de caracterısticas, al observar los resultados obteni-
dos con los descriptores de Fourier haciendo un analisis visual de la simetrıa en las graficas
de los vectores caracterısticos, se hace notar la posibilidad de trabajar con la mitad de
los datos que constituyen los descriptores de Fourier sin afectar los resultados de forma
significativa. Por este motivo los resultados obtenidos al aplicar PCA fueron muy similares
a los obtenidos cuando no se aplico.
Los tipos de escalamiento utilizados para el ajuste del tamano de los vectores que
almacenan los descriptores de Fourier resultaron igualmente utiles; por una parte el esca-
lamiento lineal permite elegir de manera mas equivativa los pixeles que forman el nuevo
vector reducido, mientras que con el escalamiento aleatorio se eligen de manera distribuida
a dichos pixeles.
En la extraccion de caracterısticas estructurales resulta interesante observar que el
analisis de caracterısticas con analisis de varianza arroja buenos resultados, permitiendo
trabajar con un conjunto mas pequeno de datos y ademas saber cuales son las caracterısti-
cas mas apropiadas para describir la forma del nucleo, lo cual no es posible cuando se usa
PCA como metodo de reduccion.
La tecnica de analisis de varianzas propuesta en este trabajo de tesis constituye una
nueva tecnica de seleccion de caracterısticas, viable de probarse con un conjunto de datos
distinto al usado en este trabajo para comprobar la factibilidad de su uso, como metodo
de seleccion de caracterısticas.
Un detalle observado en las caracterısticas estructurales con analisis de varianza, es el
hecho de que al reducir con PCA y obtener solo 4 componentes principales, disminuye el
ındice de reconocimiento. En cambio en las caracterısticas estructurales y radiales ocurre
lo contrario, debido posiblemente a que 4 atributos son insuficientes para describir la forma
6.2 Analisis de resultados 115
de la region.
Al considerar en la fase de pruebas, a un conjunto de muestras totalmente ajeno al uti-
lizado en la fase de entrenamiento, se obtienen buenos resultados. Este hecho confirma la
veracidad en los experimentos realizados y garantiza una clasificacion adecuada con nuevos
conjuntos de muestras.
Finalmente, podemos decir que el metodo utilizado en esta investigacion es muy util
en el analisis de especımenes biologicos, ya que es posible hacer distinciones precisas en el
analisis de color, lo que es de gran importancia en el estudio de ciertas patologıas.

Capıtulo 7
Conclusiones
7.1. Conclusiones generales
El objetivo principal en este trabajo de tesis fue clasificar a dos tipos de celulas de
sangre humana empleando tecnicas de vision por computadora. Al revisar la metodologıa
utilizada, es posible observar que no es sencillo emular la capacidad de vision que el hu-
mano posee y mucho menos igualarla.
Por otro lado, se puede notar que los componentes de un sistema de vision varıan de
acuerdo a la aplicacion. Durante la fase de adquisicion de la imagen existieron condiciones
que no se lograron controlar como las condiciones de preparacion de la muestra, el area de
trabajo, la iluminacion ambiental y la iluminacion de la fuente.
Considerando estos inconvenientes se opto por el uso de tecnicas que atenuaran los
efectos de dichas variaciones, de esta manera en la fase de segmentacion se crea un modelo
de color utilizando el espacio de color TSL propuesto por [Tomaz et al., 2003], obteniendo
buenos resultados.
Ademas, la segmentacion es casi directa, sin ser estrictamente necesario eliminar pri-
mero los elementos del fondo en la imagen. Esto es una importante contribucion para el
analisis visual de leucocitos, ya que se puede aplicar el algoritmo de segmentacion propues-
to en este trabajo de tesis sin necesidad de recalcular la matriz de covarianza y la distancia
de Mahalanobis, que se requiere para la umbralizacion de pixeles que pertenecen o no al

118 7 CONCLUSIONES
nucleo de la celula, reduciendo el tiempo de calculo en analisis posteriores.
Como el objetivo principal fue clasificar a las celulas de acuerdo a su morfologıa nuclear,
se opto por considerar caracterısticas que describieran lo mejor posible, la forma de dicha
region. Se penso en principio, que al considerar como descriptores a un conjunto reducido
de caracterısticas estructurales se tendrıa una buena descripcion de la forma y como conse-
cuencia un buen ındice de reconocimiento; sin embargo al probar con otro conjunto mayor
de caracterısticas que se deduce a partir del centroide y el perımetro de la region, se logra
tener una descripcion mas completa de la forma de la region al usar algunas propiedades
de la FFT, alcanzando un ındice de reconocimiento del 99 %.
Tambien vale la pena mencionar que los ındices de reconocimiento en el caso de las
caracterısticas estructurales y radiales, mejoraron al aplicar la tecnica de PCA antes de
entrenar a la red neuronal. En este caso lo que se observa es que el numero de epocas se re-
dujo notablemente cuando se preprocesan los datos con PCA, lo cual es de esperarse sobre
todo cuando se utilizan las caracterısticas radiales, dado que para obtenerlas se aplico la
FFT y al observar la representacion grafica de dichas caracterısticas es notable la simetrıa
que hay en dicha grafica, lo cual permite suponer que es posible tomar solo la mitad de los
datos que se observan en dicha grafica y considerar a este conjunto como caracterısticas
radiales.
Finalmente se comprobo una vez mas que la red neuronal de retroprogacion utilizada
por [Katz, 2000] es una buena alternativa para la clasificacion de celulas.
7.2. Trabajo a Futuro
Existe mucho trabajo que hacer con el tipo de observaciones que se manejan en este
trabajo y con la metodologıa utilizada. A continuacion se mencionan algunas propuestas:
1. Sustituir la forma empırica utilizada en el diseno del filtro inicial usado en la segmen-
tacion, por un analisis de regiones empleando tecnicas de agrupacion como K-means.
2. Dado que cada celula identificada tiene mas subtipos, al utilizar tecnicas de segmenta-
cion basada en textura y color para aislar el citoplasma y extraer sus caracaterısticas,
7.2 Trabajo a Futuro 119
se puede tener una descripcion mas completa de la celula y esto puede ampliar el
numero de clases a reconocer.
3. Agregar un modulo que permita ademas de identificar, contar las celulas visualizadas
en la escena.
4. Analizar nuevos parametros encontrados (valores y vectores caracterısticos de la re-
gion segmentada) para determinar si representan un patron especıfico que permita
reconocer una clase.
5. La superposicion temporal de regiones segmentadas de la misma clase con tecnicas
de empalmamiento, puede ser util en el analisis para determinar el tipo de la celula.
6. Implementar una segmentacion semi-automatica al definir un espacio de color exclusi-
vo para las imagenes de frotis sanguıneo utilizando la tecnica descrita en [Guzman, 2002].
7. Analizar el comportamiento de la logica difusa en el proceso de segmentacion para
lograr una mejor descripcion de la region de interes, pues de acuerdo a [Carron, 1995]
reporta buenos resultados.
8. Desarrollar una interfaz grafica en la que se integran los modulos que componen este
trabajo de tesis.
9. Promover la aplicacion GUI para fines educativos que trabajarıa en tiempo real.
10. Utilizar la metodologıa aplicada en este trabajo, como marco de referencia para el
desarrollo de aplicaciones similares que persigan la identificacion de otro tipo de
objetos de interes en el area clınica u otras areas.


Referencias
[Ses, 1999] (1999). Guıa de operacion y mantenimiento basico Sistema K-1000. CIBA
CORNING DIAGNOSTICS -MEXICO-, Departamento de Servicio Tecnico, Zona Cen-
tro. Mexico.
[Mot, 2004] (2004). Manual de operacion de Moticam 350. Micro-optic industrial group
CO; LTD., U.S.A.
[Abdallah et al., 1995] Abdallah, M. A., Samu, T. I., and Grissom, W. A. (1995). Auto-
matic target identification using neural networks.
[Acosta et al., ] Acosta, B. M., Zuluaga, M. C. A., and Salazar, I. H. Tutorial de redes
neuronales. http://ohm.utp.edu.co/neuronales.
[Alpaydm, 2004] Alpaydm, E. (2004). Introduction to Machine Learning.
[Awcock and R., 1996] Awcock, G. J. and R., T. (1996). Applied Image Processing.
[Beckman Coulter, 2006] Beckman Coulter, I. (2006). Contadores hematologicos beckman
coulter. http://www.beckmancoulter.com.
[Bourgin, 1994] Bourgin, D. (1994). http://www.neuro.sfc.keio.ac.jp.
[Carron, 1995] Carron, T. (1995). Segmentation dımages coleur dans la base Treinte-
Luminance-Saturation:approche numerique et symbolique.
[Comaniciu, 2001] Comaniciu, D. (2001). Cell image segmentation for diagnostic patho-
logy. www.caip.rutgers.edu/riul/research/papers/ps/cells.ps.gz.

122 REFERENCIAS
[Cormack, 1997] Cormack, D. H. (1997). Histologıa de HAM. Mexico D.F.
[Cortijo, 2001] Cortijo, B. F. J. (2001). Bioestadıstica: Metodos y Aplicaciones.
[de la Escalera, 2001] de la Escalera, H. A. (2001). Vision por computador. Fundamentos
y Metodos.
[Duda, 2001] Duda, O. R. (2001). Pattern Classification.
[Flores, 2001] Flores, P. L. (2001). Recuperacion de imagenes combinando redes neuronales
y wavelets. Tesis INAOE.
[Freggiaro and Espejo, 2006] Freggiaro, L. E. and Espejo, R. (2006).
http://www.forobioquimico.com.ar.
[Galenica, 2005] Galenica (2005). http://www.galenica.cl/tecnologia_vcs.html.
[Garcıa and Sierra, 2001] Garcıa, L. D. and Sierra, J. L. C. (2001). Bioestadıstica.
http://nutriserver.com/cursos.
[Gonzalez and Woods, 1996] Gonzalez, R. C. and Woods, R. E. (1996). Tratamiento Di-
gital de imagenes.
[Goodrich and Tamassia, 2003] Goodrich, M. T. and Tamassia, R. (2003). Data etructures
and algorithms in Java.
[Guzman, 1997] Guzman, D. L. A. (1997). Etude despaces couleur pour la segmentation
et laide alanalyse. These Doctorale.
[Guzman, 2002] Guzman, D. L. A. (2002). Procesamiento digital de imagenes colposcopi-
cas.
[Hair et al., 2001] Hair, J. F., Rolph, A. E. J., and Tatham, R. L. (2001). Analisis multi-
variante.
[Hen and Hwang, 2002] Hen, H. Y. and Hwang, J.-N. (2002). Handbook of neural network
signal processing.

REFERENCIAS 123
[Hunke, 1994] Hunke, M. H. (1994). Locating and tracking of human faces with neural
networks.
[Katz, 2000] Katz, A. R. J. (2000). Image analysis and supervised learning in the automated
differentiation of white blood cells from microscopic images. Master’s thesis.
[Kohavi, 1995] Kohavi, R. (1995). A study of cross validation and bootstrap for accuracy
estimation and model selection.
[MathWorks, 2000] MathWorks, T. I. (2000). Matlab 6.0.0.88.
[Mitchell, 1997] Mitchell, T. M. (1997). Machine Learning.
[Moore, 2001] Moore, A. W. (2001). Cross validation for detecting and preventing overfit-
ting. http://www-2.cs.cmu.edu/~awm/tutorials/overfit.html.
[Oppenheim, 1998] Oppenheim (1998). Manual para tecnicos de laboratorio. Mexico D.F.
[Pajares and de la Cruz, 2002] Pajares, G. and de la Cruz, J. M. (2002). Vision por compu-
tador. Imagenes digitales y aplicaciones.
[Pal and Pal, 1993] Pal, N. R. and Pal, S. K. (1993). A review on Image Segmentation
Techniques, volume Vol. 26 No. 9.
[Pratt, 1978] Pratt, W. K. (1978). Digital Image Processing.
[Perez and Hague, 2002] Perez, L. G. and Hague, J. M. T. (2002). Dynamic threshold se-
lection for image segmentation of natural structures based upon a performance criterion.
[Reyes, 2005] Reyes, G. O. F. (2005). Clasificacion de llantos de bebes para identificacion
de hipoacusia y asfixia por medio de un sistema hıbrido (genetico-neuronal). Tesis ITA.
[Sanchez, 2006] Sanchez, J. (2006). Revista creces. portal de tecnologıa, ciencias y biologıa.
http://www.tcb.cl.
[Schapira and Arroyo, 1994] Schapira, A. and Arroyo, I. (1994). Cells++. un contador de
celulas. http://www.ubp.edu.ar/investigacion/revista7/art6.html.
124 REFERENCIAS
[Sinha, 2002] Sinha, N. (2002). Blood cell segmentation using em algorithm.
[Solano, 2002] Solano, M. R. (2002). Modelado y reconocimiento de objetos usando apa-
riencia y multieigenespacios particionados. Tesis INAOE.
[Swokowski, 1989] Swokowski, E. W. (1989). Calculo con geometrıa analıtica.
[Terrillon and Akamatsu, 2000] Terrillon, J. and Akamatsu, S. (2000). Comparative per-
formance of different chrominance spaces for color segmentation and detection of human
faces in complex scene images.
[Terrillon et al., 1998] Terrillon, J., David, M., and Akamatsu, S. (1998). Automatic detec-
tion of human faces in natural scene images by use of a skin color model and of invariant
moments.
[Terrillon et al., 2000] Terrillon, J., Shirazi, M., Fukamachi, H., and Akamatsu, S. (2000).
Comparative performance of different skin chrominance models and chrominance spaces
for the automatic detection of human faces in color images.
[Tomaz et al., 2003] Tomaz, F., Candeias, T., and Shahbazkia, H. (2003). Improved auto-
matic skin detection in color images.
[Urdiales, 2002] Urdiales, C. (2002). http://campusvirtual.uma.es/TRcolor.PDF.
[Ushizima et al., 2004] Ushizima, D., Da-Fontoura, L., Rizzatti, E., and Zago, M.-A.
(2004). A texture approach to leukocyte recognition.
[Webner, 2006] Webner, D. (2006). Enciclopedia medica en espanol.
http://www.nlm.nih.gov.
[Wikipedia Foundation, 2006] Wikipedia Foundation, I. (2006). Wikipedia enciclopedia
libre. http://es.wikipedia.org.
[Woodliff and Herrmann, 1993] Woodliff, H. J. and Herrmann, R. (1993). Hematologıa
Clınica. Mexico D.F.

REFERENCIAS 125
[Yang and Waibel, 1995] Yang, J. and Waibel, A. (1995). Tracking human faces in real
time.


Apendice A
Espacios de color
El uso de color como descriptor para la segmentacion de una imagen resulta importante
en la extraccion de caracterısticas. A continuacion se definen algunos terminos empleados
en el analisis del color.
Brillo.- sensacion que indica si un area es mas o menos iluminada.
Tono.- sensacion que indica si un area parece similar al rojo, amarillo, verde o azul, o a
una porcion de dos de ellos.
Coloracion.- sensacion por la que un area tiene mayor o menor tono.
Luminosidad.- brillo de una zona respecto a otra blanca en la imagen.
Croma.- Coloridad de un area respecto al brillo de un blanco de referencia.
Saturacion.- relacion entre la coloracion y el brillo.
Los parametros psıquicos en la percepcion del color son la luminosidad, el tono, y la
saturacion. Un espacio de color es un metodo por el que se puede especificar, crear o
visualizar cualquier color. A continuacion se describen algunos espacios de color que son
importantes para la colorimetrıa [Urdiales, 2002].

128 A ESPACIOS DE COLOR
A.1. Espacio RGB
Este espacio de color se basa en la combinacion de tres senales de luminancia cromatica:
el rojo, el verde y el azul (Red, Green, Blue). La manera de obtener un color especıfico(X)
consiste en determinar que cantidad de cada uno de ellos (R, G, B) se necesita para obte-
nerlo.
X = R + G + B (1.1)
Cuando una camara capta una imagen en color, para cada pixel en color se tienen en
realidad tres, uno por cada componente (RGB), es decir, la longitud de onda de cada color
basico. El inconveniente de este modelo es que en sus tres valores mezcla la informacion
del color (tono y saturacion) y la intensidad.
A.2. Espacio TSL
Los componentes fundamentales de este espacio de color son el Tinte, la Saturacion y la
Luminosidad. El tinte se puede relacionar con la longitud de onda como parametro, la lu-
minosidad habla de la energıa del color y la saturacion habla de la pureza del color, es decir
que tan mezclado con el color blanco se encuentra dicho color. Este sistema fue propuesto
por Munsell [Pratt, 1978], como un modelo de la percepcion humana del color y tambien
es conocido como sistema bi-conico debido a su construccion espacial [Guzman, 2002]. En
la Figura A.1 se muestra la organizacion del espacio de color propuesto por Munsell.
A.3. Espacio HSI
En este espacio caracteriza el color en terminos de tono o tinte (Hue), saturacion o
cromatismo (Saturation) y brillo (Intensity). Ası, de dos fuentes de luz con el mismo
espectro, aquella que tenga mayor intensidad aparecera mas brillante. Aunque, dos objetos
de igual intensidad no siempre tienen el mismo brillo. La saturacion describe la blancura
de un color. Las transformaciones matematicas que permiten el cambio del espacio RGB
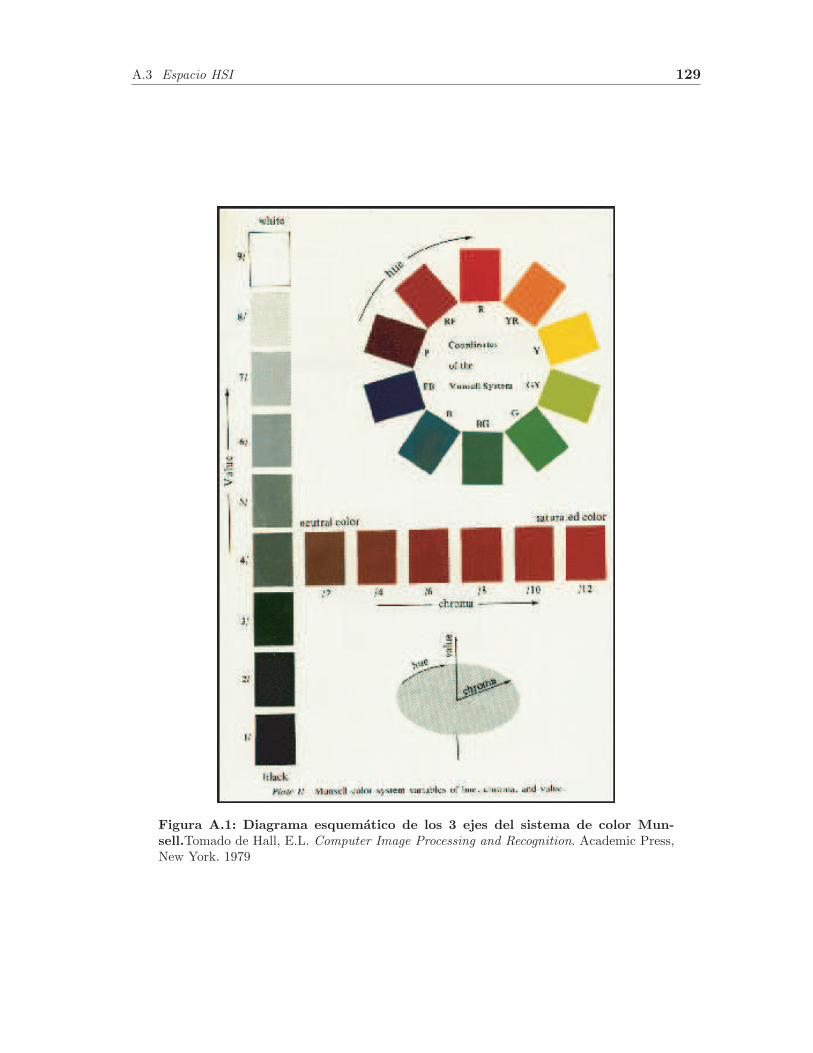
A.3 Espacio HSI 129
Figura A.1: Diagrama esquematico de los 3 ejes del sistema de color Mun-sell.Tomado de Hall, E.L. Computer Image Processing and Recognition. Academic Press,New York. 1979

130 A ESPACIOS DE COLOR
a HSI son las siguientes:
I =R + G + B
3(1.1)
H = arctan(√
3(G−B)(R−G) + (R−B)
) (1.2)
S = 1− min(R,G, B)3
(1.3)
Las variaciones de este espacio de color son:
HSL (Hue Saturation Lightness)
HSV (Hue Saturation Value)
HCI (Hue Croma/Colourfulness Lightness)
HVC (Hue Value Croma)
TSD (Hue Saturation Durkness)
Las desventajas de este modelo son:
1. La no linealidad de las transformaciones realizadas, lo cual implica un elevado costo
computacional.
2. La singularidad existente en el entorno del eje definido por R=G=B (Saturacion=0),
que provoca que los valores obtenidos por el tono sean inestables.
A.4. Los espacios XYZ, Luv, Lab
El espacio de color XYZ evita los coeficientes negativos obtenidos en los modelos an-
teriores para algunas coloraciones de determinada longitud de onda; que es causa de una
fuente de error importante en los calculos colorimetricos. En el modelo XYZ, la compo-
nente Y representa la luminosidad y XZ la coloracion. Este espacio es independiente del
dispositivo utilizado y generalmente se trabaja con valores normalizados entre cero y uno.
Este espacio constituye el llamado Diagrama Internacional XY, CIE o carta cromatica xy.
Y una vez obtenidas las coordenadas XYZ se pueden construir diferentes espacios CIES,
A.5 Los espacios de color YIQ, YUV, YCbCr y YCC 131
como Luv y Lab en los que la informacion se descompone en tono, cromatismo e intensidad
del color.
Espacio Luv Este modelo se definio en 1976, con la finalidad de obtener mas uniformidad
y precision en la representacion del color. Posee 3 componentes: L, u and v. El componente
L define la luminancia, mientras que u y v definen la crominancia. CIE Luv es muy utilizado
en calculo de colores pequenos o diferencias de color, especialmente con colores aditivos. En
[Bourgin, 1994] se pueden encontrar las ecuaciones para la transformacion a este espacio
de color a partir del espacio XYZ.
A.5. Los espacios de color YIQ, YUV, YCbCr y YCC
En estos espacios se trabaja con la luminancia (luminosidad) y la crominancia (color).
Estan muy relacionados con los sistemas de color para la television.
A.6. El espacio CMY(K)
Esta formado por Cıan, Magenta, Amarillo y Negro. Se utiliza en la impresion y fo-
tografıas, por lo que depende del dispositivo (impresora). Para obtener los equivalentes
respectivos, se resta de las componentes el color blanco en el caso de CMY, o el negro para
CMYK.

132 A ESPACIOS DE COLOR
Apendice B
Galerıa de imagenes
En este apartado se ha colocado la base de datos recopilada y utilizada en este trabajo
de investigacion, esperando sea util para trabajos futuros.
Como se menciona en capıtulos anteriores, las muestras biologicas se prepararon con
sangre de pacientes normales, es decir, se excluyeron especımenes que presentan patologıas
que pudieran ocasionar la presencia de formas anormales de celulas y de sus organos inter-
nos, como en el caso de la leucemia.
Tambien es posible apreciar los efectos provocados por los cambios de iluminacion que
fueron imposibles de controlar en el momento de la digitalizacion de las muestras. Esto
debido, a los ajustes que son necesarios para enfocar a la imagen y obtener una mejor
apreciacion de su composicion interna.

134 B GALERIA DE IMAGENES
Figura B.1: Leucocitos segmentados: Eosinofilos. (Continua)

135
Figura B.2: Leucocitos segmentados: Eosinofilos. (Continuacion)

136 B GALERIA DE IMAGENES
Figura B.3: Leucocitos segmentados: Neutrofilos. (Continua)

137
Figura B.4: Leucocitos segmentados: Neutrofilos. (Continuacion)
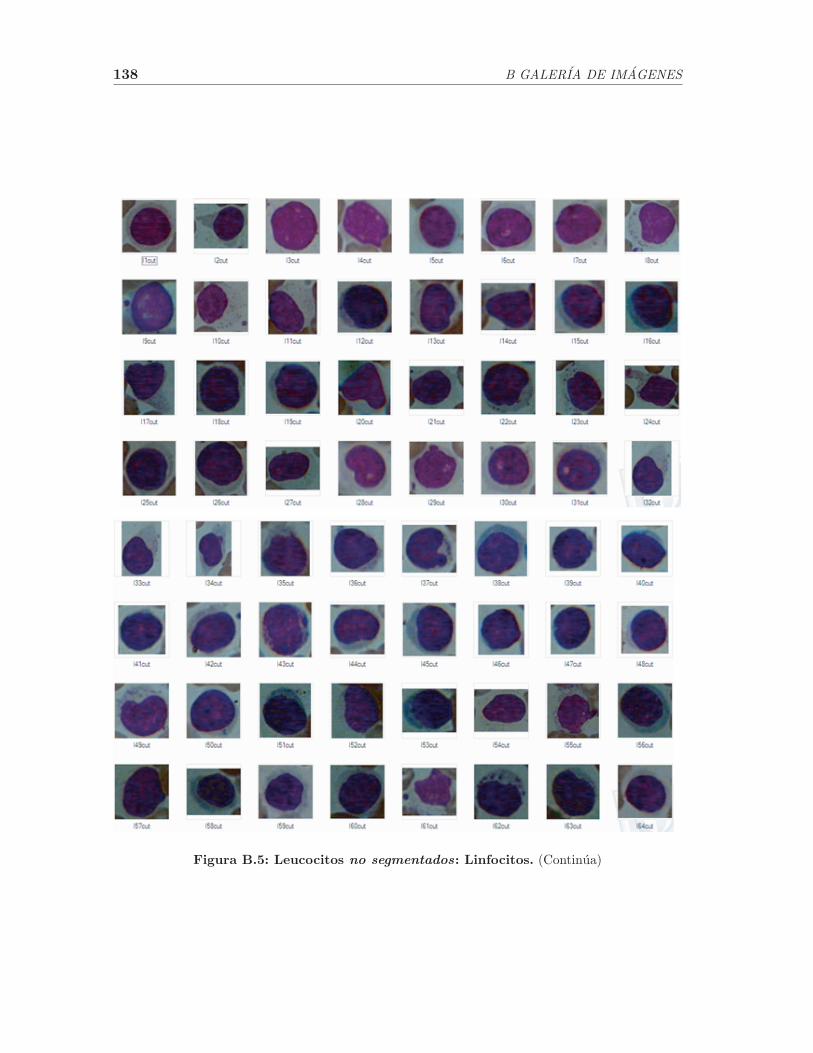
138 B GALERIA DE IMAGENES
Figura B.5: Leucocitos no segmentados: Linfocitos. (Continua)

139
Figura B.6: Leucocitos no segmentados: Linfocitos. (Continuacion)
Figura B.7: Leucocitos no segmentados: Monocitos.

140 B GALERIA DE IMAGENES
Figura B.8: Casos especiales. En b1 y b2 se observan celulas basofilas pertenecientesa la clase segmentados, es un tipo de celula que por su rareza fue excluıda de las pruebashechas en la investigacion. DOSe66-n contiene abajo un neutrofilo pequeno, arriba uneosinofilo con el nucleo parcialmente destruido y distribuido en el citoplasma. DOSe103-mono muestra arriba a la izquierda un eosinofilo y abajo a la derecha un monocito. EnDOSl40mono3 se observa arriba a la derecha un monocito y abajo a la izquierda unlinfocito. DOSn28linfo10 arriba a la derecha presenta un neutrofilo grande y abajo a laizquierda un linfocito.
Apendice C
Listado de modulos que componen
el metodo de clasificacion
A continuacion se describe el nombre y la descripcion de los principales funciones
programadas en este trabajo de investigacion.
En la tabla C.1 se enlistan los nombres de las principales funciones implementadas,
mientras que en el disco anexo al final de esta tesis, se encuentran los codigos adicionales
para algunas variantes de funciones contenidas en la tabla, como la funcion escalarIMG
que presenta dos funciones relacionadas llamadas escalarNUCLEOS y escalarCUT.

142 C LISTADO DE MODULOS QUE COMPONEN EL METODO DE CLASIFICACION
NOMBRE DESCRIPCION
escalarIMG su funcion es escalar una imagen a un tamano de 64x64 pixeles.getfeatures obtiene caracterısticas de la region de interesdisMaha devuelve imagen filtrada con modelo de MahalanobisRGBtoTSL convierte imagen del espacio RGB al espacio TSLunirfeatures construye los vectores de caracterısticas estructuralesfiltroinicial aplica filtro inicial a la imagen recibida como entradagetpromRGBmodif2006 determina lımites de crecimiento de histogramas en RGB
getNradobtiene el numero de puntos que forman el perımetro de unaregion
muestrearRADIS realiza el escalamiento caracterısticas radialespredatosNET2crossViguales entrena red neuronal con caracterısticas estructurales
predatosNET2crossIguVAR2entrena red neuronal con caracterısticas estructurales conanalisis de varianza
FFTradis4mues entrena red neuronal con caracterısticas estructurales
Tabla C.1: Principales funciones programadas

Indice alfabetico
Analisis, 6, 8, 12, 20, 25, 60, 68, 82, 95, 109,
113
Celula, 2
anatomıa, 11
fisiologıa, 11
Citologıa, 11
Citoplasma, 11, 12
Color, 98, 127
Distancia, 35, 68, 80, 104, 117
euclıdea, 24
Mahalanobis, 23, 24, 57, 104, 113
radial, 86, 91
Estadıstica, 11, 25, 31
Filtro, 27, 80, 99, 104, 105, 113, 118
inicial, 75, 99
mediana, 30
Fourier, 8, 59, 89, 91, 114
Hematologıa, 11
Leucocitos, 5, 13, 69
Membrana, 7, 11
Microscopio, 2, 6, 12, 70, 72, 73, 81, 96
Modelo, 117
Muestras, 5, 73, 94, 109, 113, 133
Nucleo, 75
Patron, 19, 22, 37, 42, 44
PCA, 25, 26, 29, 68, 94, 107, 108, 111, 112,
114, 118
Procesamiento
computacional, 73
imagenes, 11, 38, 59, 70
Recuento Diferencial, 1, 13, 15
Redes
neuronales, 11
Region, 27, 28, 69, 80
Segmentacion, 6, 27–30, 54, 58, 60, 62, 68,
73, 75, 81, 98, 113, 118
automatica, 8
semi-automatica, 26
Tecnicas, 26, 31, 59
agrupacion, 118
clasificacion, 31
144 INDICE ALFABETICO
empalmamiento, 119
escalamiento, 87
segmentacion, 27, 29, 118
validacion, 11, 50
vision, 3, 5, 6, 117
Varianza, 20, 22, 25