Cap tulo 2 - Hasiera - UPV/EHU · 2.2 Sistemas mec anicos de traslaci on 13 Figura 2.3: Sistema...
30
Cap´ ıtulo 2 Modelizaci´ on: Ejemplos y aplicaciones 2.1. ¿Qu´ e es un modelo? Un modelo es una representaci´ on idealizada pero precisa de los (algunos) componen- tes de un sistema din´ amico cuyo comportamiento se quiere estudiar o predecir. Se usan los modelos porque en general los sistemas resultan demasiado complejos. Un modelo puede no ser ´ unico: la elecci´ on del modelo depende de las preguntas que queremos contestar. En la Figura 2.1 se presenta, a modo de ejemplo, un modelo del amortiguador de una rueda de un coche. Figura 2.1: Modelo del amortiguador de una rueda de un coche 9
Transcript of Cap tulo 2 - Hasiera - UPV/EHU · 2.2 Sistemas mec anicos de traslaci on 13 Figura 2.3: Sistema...

Capıtulo 2
Modelizacion: Ejemplos yaplicaciones
2.1. ¿Que es un modelo?
Un modelo es una representacion idealizada pero precisa de los (algunos) componen-tes de un sistema dinamico cuyo comportamiento se quiere estudiar o predecir.
Se usan los modelos porque en general los sistemas resultan demasiado complejos. Unmodelo puede no ser unico: la eleccion del modelo depende de las preguntas que queremoscontestar.
En la Figura 2.1 se presenta, a modo de ejemplo, un modelo del amortiguador de unarueda de un coche.
Figura 2.1: Modelo del amortiguador de una rueda de un coche
9
10 Modelizacion: Ejemplos y aplicaciones
Un modelo debe ser completo y eficiente. Ademas, debe ser sencillo pero no simplista,es decir, no debe existir perdida significativa de informacion.
Un modelo matematico es una representacion mediante ecuaciones del sistemadinamico (fısico, biologico, economico, ...) una vez modelizado.
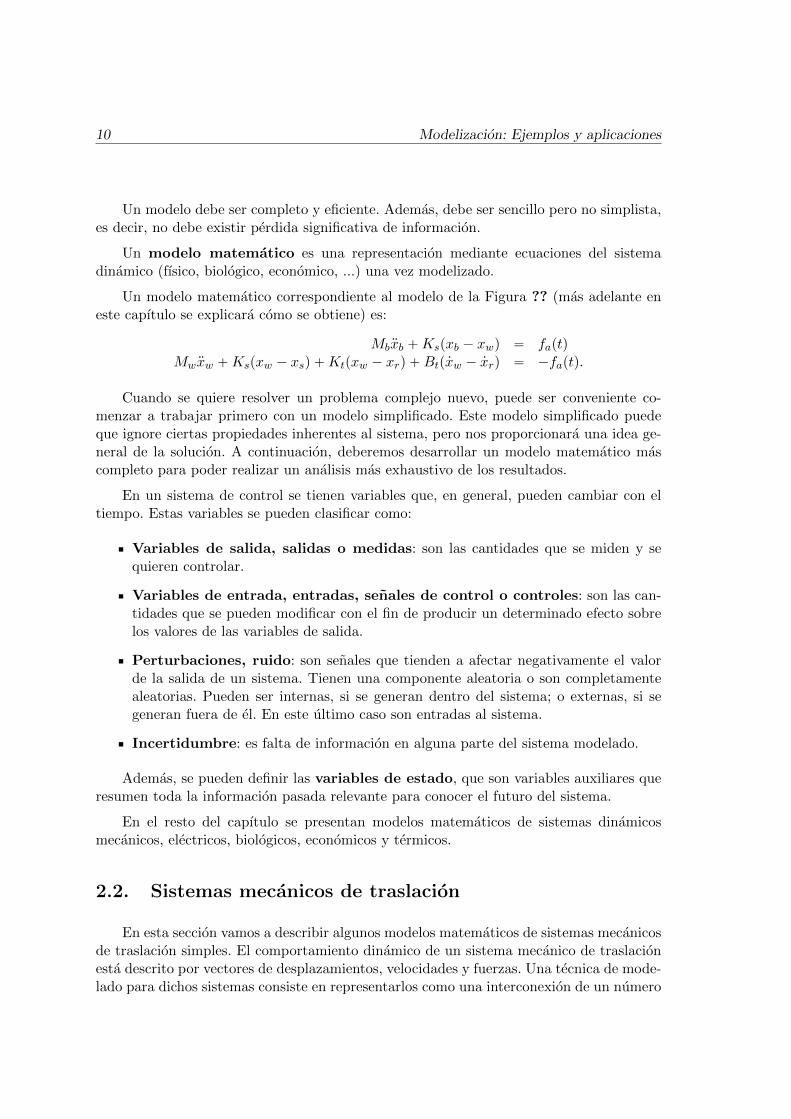
Un modelo matematico correspondiente al modelo de la Figura ?? (mas adelante eneste capıtulo se explicara como se obtiene) es:
Mb:xb `Kspxb ´ xwq “ faptqMw:xw `Kspxw ´ xsq `Ktpxw ´ xrq `Btp 9xw ´ 9xrq “ ´faptq.
Cuando se quiere resolver un problema complejo nuevo, puede ser conveniente co-menzar a trabajar primero con un modelo simplificado. Este modelo simplificado puedeque ignore ciertas propiedades inherentes al sistema, pero nos proporcionara una idea ge-neral de la solucion. A continuacion, deberemos desarrollar un modelo matematico mascompleto para poder realizar un analisis mas exhaustivo de los resultados.
En un sistema de control se tienen variables que, en general, pueden cambiar con eltiempo. Estas variables se pueden clasificar como:
Variables de salida, salidas o medidas: son las cantidades que se miden y sequieren controlar.
Variables de entrada, entradas, senales de control o controles: son las can-tidades que se pueden modificar con el fin de producir un determinado efecto sobrelos valores de las variables de salida.
Perturbaciones, ruido: son senales que tienden a afectar negativamente el valorde la salida de un sistema. Tienen una componente aleatoria o son completamentealeatorias. Pueden ser internas, si se generan dentro del sistema; o externas, si segeneran fuera de el. En este ultimo caso son entradas al sistema.
Incertidumbre: es falta de informacion en alguna parte del sistema modelado.
Ademas, se pueden definir las variables de estado, que son variables auxiliares queresumen toda la informacion pasada relevante para conocer el futuro del sistema.
En el resto del capıtulo se presentan modelos matematicos de sistemas dinamicosmecanicos, electricos, biologicos, economicos y termicos.
2.2. Sistemas mecanicos de traslacion
En esta seccion vamos a describir algunos modelos matematicos de sistemas mecanicosde traslacion simples. El comportamiento dinamico de un sistema mecanico de traslacionesta descrito por vectores de desplazamientos, velocidades y fuerzas. Una tecnica de mode-lado para dichos sistemas consiste en representarlos como una interconexion de un numero

2.2 Sistemas mecanicos de traslacion 11
Figura 2.2: Realizacion fısica de un amortiguador lineal
finito de elementos idealizados (masas, muelles y amortiguadores). Los elementos se des-criben como pasivos porque pueden ”disipar” o “almacenar” energıa mecanica, pero nopueden introducirla en el sistema. El comportamiento de cada elemento esta gobernadopor una ley fısica simple, que se llama ecuacion o ley constitutiva del elemento. La leyfundamental que controla los sistemas mecanicos es la segunda ley del movimiento deNewton: La suma de las fuerzas que actuan sobre una partıcula es igual a la razon delcambio del momento lineal respecto del tiempo. Por lo tanto, recordando que el momentolineal de una partıcula de masa M que se mueve con velocidad vptq es pptq “Mvptq, la ley
constitutiva de un elemento masa esta dada pord
dtpMvptqq “ F ptq donde F ptq es la fuerza
aplicada a la masa. La masa es una cantidad escalar que se mide (en el sistema internacio-nal de unidades, SI, que es el que se usara por defecto) en kilogramos, la velocidad y fuerzason vectores cuyos modulos se miden en metros/segundos y newtons respectivamente. Lasmasas almacenan energıa cinetica; es decir, conservan la energıa mecanica del sistema au-mentando la cinetica. Las velocidades y aceleraciones se deben expresar en relacion a unsistema de referencia inercial. Los sistemas de referencia inerciales son aquellos en los quese cumple la primera ley de Newton: todo cuerpo permanecera en reposo o en movimientouniforme en una lınea recta a menos que sea obligado a cambiar su estado por la accionde una fuerza externa. Ası pues, los sistema de referencia inerciales son aquellos desdelos que se observa que un cuerpo sobre el que no actua ninguna fuerza neta se muevecon velocidad constante. En mecanica clasica se suele tomar como sistema de referenciainercial el fijado en el centro del sol.
La ley constitutiva de un muelle (tambien llamado resorte) lineal esta dada por laley de Hooke: El alargamiento (estiramiento o elongacion) que experimenta un muelle esdirectamente proporcional a la fuerza aplicada sobre el mismo. Ası, kyptq “ F ptq donde yptqes la elongacion, F ptq es la fuerza aplicada al muelle y k es la constante de elasticidad del
Figura 2.3: Realizacion fısica de un muelle- amortiguador

12 Modelizacion: Ejemplos y aplicaciones
Sımbolo Ley Constitutiva Variables
d
dtpMvptqq “ F ptq vptq “ v12ptq velocidad de la masa
F ptq fuerza aplicada a la masa
kyptq “ F ptq yptq “ y12ptq ´ y12 elongacion netaF ptq fuerza aplicada al muelle
cvptq “ F ptq vptq “ v12ptq velocidad relativa del pistonF ptq fuerza aplicada al amortiguador
Tabla 2.1: Sımbolos y leyes constitutivas de masas, muelles y amortiguadores
muelle. El desplazamiento se expresa en metros y la constante k en kilogramos/segundos2
o, lo que es lo mismo, newtons/metros. Los muelles almacenan energıa potencial; es decir,conservan la energıa mecanica aumentando la energıa potencial. En realidad la relacionlineal entre la fuerza y el alargamiento es una aproximacion valida para alargamientos nodemasiado grandes (que dependen del material del que esta hecho el muelle).
Una realizacion fısica de un amortiguador traslacional lineal se compone de un cilindrocon un piston movil (Figura 2.2). El cilindro esta lleno de un fluido viscoso y hay agujerosen la cara del piston a traves de los cuales el fluido pasa. Si la variacion del flujo dellıquido viscoso se mantiene acotado entre ciertas valores (que dependen del lıquido), elamortiguamiento viscoso se puede modelizar como una relacion lineal entre la fuerza yla velocidad relativa del piston. Por lo tanto, cvptq “ F ptq donde vptq es la velocidadrelativa del piston, F ptq es la fuerza aplicada al amortiguador y c es la constante deamortiguacion. La constante c se expresa en kilogramos/segundos o, lo que es lo mismo,newtons¨segundos/metros. Los amortiguadores disipan energıa mecanica del sistema; esdecir, la disminuyen transformandola en otros tipos de energıa (termica principalmente).En la Figura 2.3 se muestra una realizacion fısica de un muelle y amortiguador.
Suponemos que las fuerzas se transmiten sin cambios a traves de los resortes y amor-tiguadores viscosos. Si se estira un extremo de un resorte o amortiguador se observa unafuerza igual en el otro extremo. El desplazamiento relativo de los extremos del resorteproporciona una medida de la fuerza que actua sobre el y la velocidad relativa de los ex-tremos del amortiguador una medida de la fuerza sobre el amortiguador. Por otra parte,la diferencia entre una fuerza aplicada a la masa y una fuerza ejercida por la masa (sobreotro elemento) proporciona una aceleracion.
En la Tabla 2.1 se resumen las leyes constitutivas de las masas, muelles y amortigua-dores. La direccion de las fuerzas son las marcadas por las flechas, aunque esto no significa

2.2 Sistemas mecanicos de traslacion 13
que las fuerzas sean en el sentido indicado porque la magnitud de F ptq puede ser negativa.Por ejemplo, en el muelle, si y12ptq ą y12 entonces la fuerza requerida para la elongaciones en el sentido que se muestra en la figura. Sin embargo, si y12ptq ă y12 entonces senecesita comprimir el muelle de modo que F ptq ă 0 y la fuerza es en el sentido opuesto.La masa, muelle y amortiguador de la Tabla 2.1 son objetos idealizados desde otro puntode vista. Todos los muelle tienen alguna (comparativamente pequena) inercia y amorti-guamiento. Y todos los amortiguadores tiene alguna masa y pequenos efectos “muelle”.Podemos suponer, como es habitual, que las diferencias entre las inercias de los objetosreales e idealizados se anaden a la masa, todos los efectos “muelle” en los muelles y todaslas fuerzas de friccion en los amortiguadores. Estos modelos se conocen con el nombre demodelos de parametros agrupados.
Si describimos un sistema mecanico como una interconexion de un numero finito demasas, muelles y amortiguadores, obtendremos un modelo del sistema global combinandolas leyes constitutivas de cada elemento con las leyes de interconexion que gobiernanlas interacciones entre ellos. Asumiremos que las fuerzas entre los elementos mecanicosobedecen la tercera ley de Newton de accion y reaccion: Toda fuerza de un elemento sobreotro va acompanada de una fuerza de reaccion del segundo elemento sobre el primero deigual magnitud pero en direccion opuesta a lo largo de la lınea que los une.
Ponemos en practica estos conceptos para obtener un modelo matematico de un osci-lador lineal y una aplicacion de este en automocion.
Ejemplo 2.1 (Oscilador lineal vertical) Un sistema masa-resorte-amortiguador-fuerzaexterna vertical consiste de un resorte de masa despreciable que cuelga suspendido de unsoporte rıgido, una masa puntual M que se encuentra sujeta al extremo libre del resorte ya un mecanismo amortiguador. La masa se mueve a lo largo de un eje coordenado vertical.Definimos como direccion positiva la que apunta hacia abajo y definimos su origen en laposicion de equilibrio de la masa bajo la influencia de la gravedad (ası evitamos tener encuenta la fuerza de la gravedad). La funcion yptq, que describe la posicion de la masa enel tiempo t, coincide entonces con su desplazamiento respecto a la posicion de equilibrio.
Figura 2.4: Oscilador lineal

14 Modelizacion: Ejemplos y aplicaciones
Ademas de la fuerza exterior βuptq hay dos tipos de fuerzas interiores que actuan sobrela masa. Estas estan modelizadas por el muelle y el amortiguador con coeficientes k y crespectivamente. Notese ademas que estan en direccion opuesta al desplazamiento y a lavelocidad respectivamente. Por la segunda ley de Newton la suma de las fuerzas actuandosobre M debe ser igual a M :y. La ecuacion del movimiento que resulta es por lo tanto
M :yptq “ ´c 9yptq ´ kyptq ` βuptqO tambien,
M :yptq ` c 9yptq ` kyptq “ βuptq,donde 9yptq y :yptq denotan las derivadas primera y segunda de yptq respectivamente.
Notese que si se hubiera elegido como referencia del desplazamiento la posicion relajadadel resorte y no la de la masa bajo la accion de la gravedad la ecuacion del movimientohabrıa sido la misma. En efecto, sea xptq la posicion de la masa en el tiempo t con respectoa la posicion relajada del resorte. La elongacion inicial con el sistema en reposo debido ala fuerza gravitacional Mg es Mgk (pues por la segunda ley de Newton 0 “ Mg ´ kx).Por lo tanto, yptq “ xptq ´Mgk. Ahora, por la segunda ley de Newton, la suma de lasfuerzas actuando sobre M debe ser igual a M :x.
M :xptq ` c 9xptq ` kxptq “ βuptq `Mg.
Realizando el cambio de variable yptq “ xptq ´Mgk, se obtiene la ecuacion diferencialanterior en y
M :yptq ` c 9yptq ` kyptq “ βuptq.Esta es una ecuacion diferencial lineal de segundo orden. La variable de entrada es βuptqmientras que la variable de salida es el desplazamiento yptq. Suponiendo que yp0q “ 0y 9yp0q “ 0 nuestro objetivo podrıa ser controlar el sistema de forma que pudieramosconseguir una determinada elongacion, devolver la masa a su posicion de equilibrio, etc.
Ejemplo 2.2 (Sistema de dos masas conectadas por un resorte y un amorti-guador) Consideremos ahora un sistema con dos masas y un resorte y un amortiguadorconectandolas (Figura 2.5). Se supone que no hay rozamiento asociado con las superficies.La suma de fuerzas en ambas masas proporciona dos ecuaciones diferenciales en terminosde dos variables. Si el muelle produce una fuerza sobre M1 entonces, por la tercera ley de
Figura 2.5: Un sistema mecanico de dos masas acopladas con su diagrama de fuerzas.

2.2 Sistemas mecanicos de traslacion 15
Newton, la masa M1 ejerce una fuerza igual y opuesta sobre el muelle. Esta se transmitea traves del mismo para aparecer como una fuerza aplicada sobre M2 y la elongacion delresorte es proporcional a la fuerza transmitida. La fuerza aplicada por M1 al amortiguadorse transmite tambien a M2 como una fuerza aplicada y la velocidad relativa de las dosmasas es proporcional a la fuerza transmitida. En el diagrama de fuerzas de la Figura 2.5se muestran las fuerzas que actuan sobre M1 y M2. Observese que el movimiento de lasdos masas es hacia la izquierda. Por lo tanto, el muelle y el amortiguador actuan sobre laprimera masa oponiendose al movimiento, mientras que en las segunda lo hacen a favordel movimiento. Aplicando la segunda ley de Newton para cada masa y la tercera ley deNewton para la interaccion entre las masas se obtienen las ecuaciones del movimiento:
M1:y1ptq “ fptq ´Bp 9y1ptq ´ 9y2ptqq ´Kpy1ptq ´ y2ptqqM2:y2ptq “ Bp 9y1ptq ´ 9y2ptqq `Kpy1ptq ´ y2ptqq.
Equivalentemente:
M1:y1ptq `Bp 9y1ptq ´ 9y2ptqq ´Kpy1ptq ´ y2ptqq “ fptqM2:y2ptq `Bp 9y2ptq ´ 9y1ptqq `Kpy2ptq ´ y1ptqq “ 0.
Veamos ahora un ejemplo de aplicacion del oscilador lineal.
Ejemplo 2.3 (Suspension de un coche)
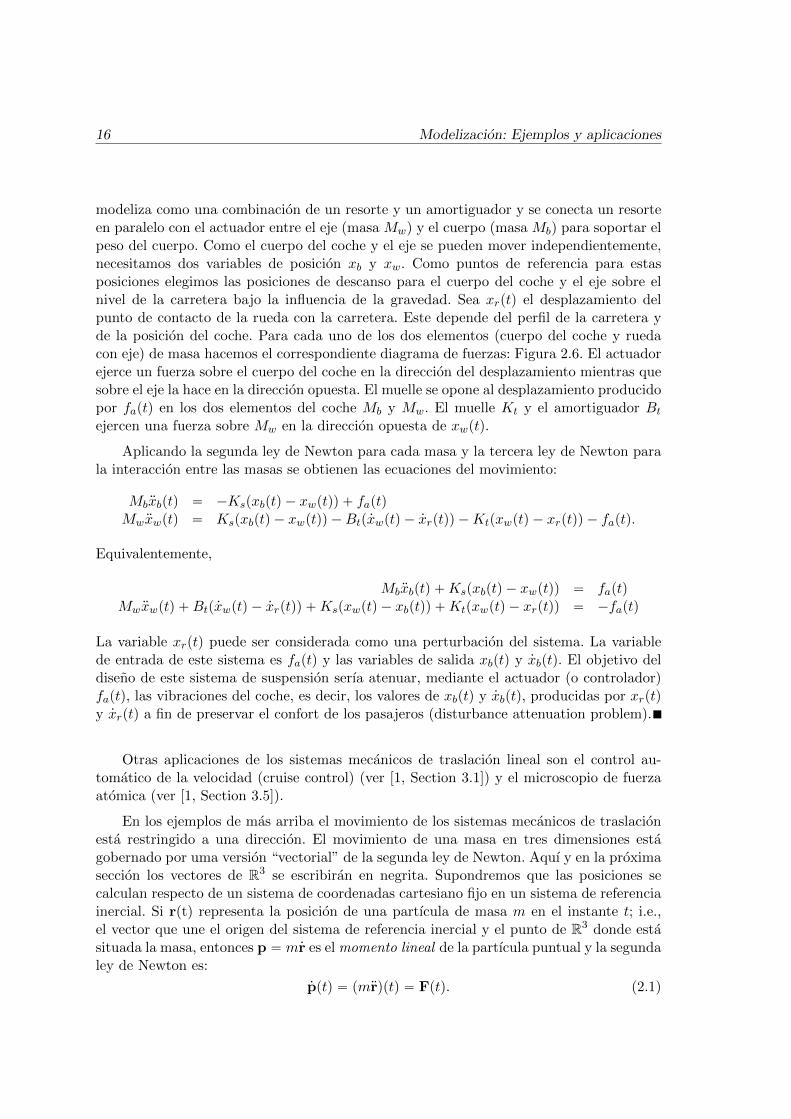
El proposito de un sistema de suspension para un coche es el de suavizar la respuestadel coche a las irregularidades de las carreteras. Solo consideraremos los movimientosverticales del coche e ignoraremos los posibles movimientos rotacionales. Para simplificarutilizamos un modelo de un cuarto de coche prestando atencion a una sola rueda, lamitad de un eje y un cuarto de la masa del cuerpo del coche. El sistema incorpora unactuador que se conecta directamente entre el cuerpo y el eje (ası se puede introducir unafuerza controlada faptq en el sistema de suspension). Vease la Figura 2.6. La rueda se
Figura 2.6: Suspension de un cuarto de coche con el diagrama de fuerzas sobre el cuerpoy el eje.
16 Modelizacion: Ejemplos y aplicaciones
modeliza como una combinacion de un resorte y un amortiguador y se conecta un resorteen paralelo con el actuador entre el eje (masa Mw) y el cuerpo (masa Mb) para soportar elpeso del cuerpo. Como el cuerpo del coche y el eje se pueden mover independientemente,necesitamos dos variables de posicion xb y xw. Como puntos de referencia para estasposiciones elegimos las posiciones de descanso para el cuerpo del coche y el eje sobre elnivel de la carretera bajo la influencia de la gravedad. Sea xrptq el desplazamiento delpunto de contacto de la rueda con la carretera. Este depende del perfil de la carretera yde la posicion del coche. Para cada uno de los dos elementos (cuerpo del coche y ruedacon eje) de masa hacemos el correspondiente diagrama de fuerzas: Figura 2.6. El actuadorejerce un fuerza sobre el cuerpo del coche en la direccion del desplazamiento mientras quesobre el eje la hace en la direccion opuesta. El muelle se opone al desplazamiento producidopor faptq en los dos elementos del coche Mb y Mw. El muelle Kt y el amortiguador Btejercen una fuerza sobre Mw en la direccion opuesta de xwptq.
Aplicando la segunda ley de Newton para cada masa y la tercera ley de Newton parala interaccion entre las masas se obtienen las ecuaciones del movimiento:
Mb:xbptq “ ´Kspxbptq ´ xwptqq ` faptqMw:xwptq “ Kspxbptq ´ xwptqq ´Btp 9xwptq ´ 9xrptqq ´Ktpxwptq ´ xrptqq ´ faptq.
Equivalentemente,
Mb:xbptq `Kspxbptq ´ xwptqq “ faptqMw:xwptq `Btp 9xwptq ´ 9xrptqq `Kspxwptq ´ xbptqq `Ktpxwptq ´ xrptqq “ ´faptq
La variable xrptq puede ser considerada como una perturbacion del sistema. La variablede entrada de este sistema es faptq y las variables de salida xbptq y 9xbptq. El objetivo deldiseno de este sistema de suspension serıa atenuar, mediante el actuador (o controlador)faptq, las vibraciones del coche, es decir, los valores de xbptq y 9xbptq, producidas por xrptqy 9xrptq a fin de preservar el confort de los pasajeros (disturbance attenuation problem).
Otras aplicaciones de los sistemas mecanicos de traslacion lineal son el control au-tomatico de la velocidad (cruise control) (ver [1, Section 3.1]) y el microscopio de fuerzaatomica (ver [1, Section 3.5]).
En los ejemplos de mas arriba el movimiento de los sistemas mecanicos de traslacionesta restringido a una direccion. El movimiento de una masa en tres dimensiones estagobernado por uma version “vectorial” de la segunda ley de Newton. Aquı y en la proximaseccion los vectores de R3 se escribiran en negrita. Supondremos que las posiciones secalculan respecto de un sistema de coordenadas cartesiano fijo en un sistema de referenciainercial. Si r(t) representa la posicion de una partıcula de masa m en el instante t; i.e.,el vector que une el origen del sistema de referencia inercial y el punto de R3 donde estasituada la masa, entonces p “ m 9r es el momento lineal de la partıcula puntual y la segundaley de Newton es:
9pptq “ pm:rqptq “ Fptq. (2.1)

2.3 Sistemas mecanicos de rotacion 17
Si consideramos ahora un sistema de N partıculas puntuales, cada una con masa mi en laposicion ri, i “ 1, . . . , N , el momento lineal del sistema es, por definicion, la suma de losmomentos lineales de cada una de las partıculas:
pptq “Nÿ
i“1
piptq “Nÿ
i“1
mi 9riptq. (2.2)
Al aplicar la segunda ley de Newton a cada partıcula debemos distinguir entre fuerzasexternas Fe
i ptq y las fuerzas de interaccion entre las partıculas Fijptq. Teniendo en cuenta(2.1) para todas las partıculas, la segunda ley de Newton sobre todo el sistema quedarıa:
9pptq “Nÿ
i“1
mi:riptq “Nÿ
i“1
Fei ptq `
Nÿ
i,j“1,i‰jFijptq. (2.3)
Ahora bien, por la tercera ley de Newton, la suma de las fuerzas de accion y reaccion paracada par de partıculas Fijptq ` Fjiptq es cero para todo t y para todo i, j “ 1, . . . , N coni ‰ j. Por lo tanto, la suma en el segundo termino de la derecha de (2.3) se anula. Sidefinimos la fuerza externa total y el centro de masa del sistema en el instante t como
Feptq “Nÿ
i“1
Fei ptq, rptq “
Nÿ
i“1
miriptqM
siendo M “Nÿ
i“1
mi, (2.4)
las ecuaciones (2.2) y (2.3) quedan, respectivamente:
pptq “M 9rptq y 9pptq “M :rptq “ Feptq. (2.5)
La interpretacion de esta propiedad es que el centro de masa del sistema se mueve comosi la fuerza externa total actuara sobre la masa total del sistema concentrada en el centrode masa.
Si en vez de una o mas partiıculas puntuales tenemos que describir el movimiento deun cuerpo rıgido en el espacio tridimensional, necesitamos especificar la posicion de sucentro de masa y su orientacion respecto de un sistema de referencia inercial. Para ello senecesita la correspondiente segunda ley de Newton para movimientos rotacionales.
2.3. Sistemas mecanicos de rotacion
El producto vectorial de vectores de R3 juega un papel importante en la descripcionde la dinamica de los sistemas mecanicos de rotacion. Recordamos su defincion y unapropiedad importante que se usarcon frecuencia. Sean i “ p1, 0, 0q, j “ p0, 1, 0q y k “p0, 0, 1q los vectores canonicos de R3. Si x “ px1, x2, x3q, y “ py1, y2, y3q son vectores deR3, su producto vectorial se define como
xˆ y “ det
»–
i j kx1 x2 x3
y1 y2 y3
fifl “ px2y3 ´ x3y2qi` px3y1 ´ x1y3qj` px1y2 ´ x2y1qk. (2.6)

18 Modelizacion: Ejemplos y aplicaciones
Equivalentemente,xˆ y “ x2y2 sen θ v
donde θ el el angulo formado por los vectores y y x, y v un vector unitario perpendicularal plano determinado por dichos vectores y cuya direccion queda determinada por la “reglade la mano derecha”.
Usando (2.6) se prueba facilmente que si xptq, yptq son funciones vectoriales con valoresen R3 entonces
d
dtpxptq ˆ yptqq “ 9xptq ˆ yptq ` xptq ˆ 9yptq.
Considerese un punto fijo O en un sistema de referencia inercial con origen O˚. Searptq el vector de posicion de una partıcula de masa m respecto de O en el instante t; esdecir, el vector con origen en O y final en la posicion que ocupa la partıcula en el instantet. El momento angular, Hptq,de dicha partıcula en el instante t respecto de O, se definecomo
Hptq “ rptq ˆ pptq “ rptq ˆmvptq.donde pptq “ mvptq es el momento lineal de la partıcula respecto del sistema inercial.Notese que si r˚ es el vector que une el origen del sistema inercial de referencia O˚ y el
punto fijo O, vptq “ d
dtprptq ` r˚q “ 9rptq. Por lo tanto, tambien Hptq “ rptq ˆm 9rptq.
Sea Fptq el vector suma de todas las fuerzas aplicadas a la partıcula en el tiempo t.El correspondiente par o momento de fuerza, Nptq, debido a la fuerza Fptq se define como
Nptq “ rptq ˆ Fptq. (2.7)
Por lo tanto, se cumple la siguiente relacion entre el par de fuerza aplicado a la partıculay la razon de cambio de su momento angular
9Hptq “ d
dtprptq ˆm 9rptqq “ 9rptq ˆm 9rptq ` rptq ˆm:rptq “ rptq ˆ Fptq “ Nptq, (2.8)
porque el producto vectorial de dos vectores con la misma direccion es cero. Ası pues, elpar de fuerza que actua sobre una partıcula es igual a la razon del cambio del momentoangular respecto del tiempo.
Supongamos ahora que, como al final de la seccion anterior, tenemos N partıculaspuntuales de masas mi, i “ 1, . . . , N . El momento angular total de tal sistema respectode O se obtiene sumando los momentos angulares de todas las partıculas:
Hptq “Nÿ
i“1
riptq ˆmi 9riptq.
Teniendo en cuanta que, como en (2.8), 9Hptq “Nÿ
i“1
riptq ˆmi:riptq, por (2.3) obtenemos
9Hptq “Nÿ
i“1
riptq ˆ˜
Fei ptq `
Nÿ
j“1,ı‰jFijptq
¸.

2.3 Sistemas mecanicos de rotacion 19
Ahora bien, por la tercera ley de Newton, Fijptq “ ´Fjiptq. Por lo tanto
9Hptq “Nÿ
i“1
riptq ˆ Fei ptq `
Nÿ
i“1
Nÿ
j“i`1
priptq ´ rjptqq ˆ Fijptq.
Pero la tercera ley de Newton tambien dice que la direccion de estas fuerzas de accion-reaccion es la del vector que une las partıculas de masas mi y mj . Es decir, la direcciondel vector riptq ´ rjptq. En consecuencia priptq ´ rjptqq ˆ Fijptq “ 0 y si definimos el parde fuerza externo total como
Neptq “Nÿ
i“1
riptq ˆ Fei ptq (2.9)
entonces9Hptq “ Neptq (2.10)
que es la expresion equivalente a (2.8) para un sistema de N partıculas puntuales. Endefinitiva, la razon de cambio en el tiempo del momento angular total de un sistema departıculas respecto de un punto fijo O es igual a la suma de los pares de fuerza respecto aO de todas las fuerzas externas.
Vimos en (2.5) que el momento lineal de un sistema de N partıculas es el mismo que sila masa total estuviera concentrada en el centro de masa moviendose con el. Desarrollamosahora el resultado correspondiente para el momento angular. Incluiremos la posibilidadde que el punto respecto al que se toman los momentos varıe con el tiempo. Sea Ot estepunto movil y denotemos por: r˚ptq el vector del origen O˚ a Ot, rptq el vector que uneOt con el centro de masa, r1iptq el vector que une el centro de masa con la partıcula demasa mi y v˚ptq “ 9r˚ptq, vptq “ v˚ptq ` 9rptq, viptq “ vptq ` 9r1iptq son las velocidades delos puntos Ot, del centro de masa y de la partıcula i con respecto, todo ello, al sistema dereferencia inercial.
Con esta notacion y para los calculos que vienen a continuacion es util tener presenteque
M vptq “Nÿ
i“1
miviptq, para todo t (2.11)
En efecto
Nÿ
i“1
miviptq “Nÿ
i“1
mivptq `Nÿ
i“1
mi 9r1iptq “M vptq ` d
dt
˜Nÿ
i“1
mir1iptq
¸.
Ahora bien, el vector de posicion de la partıcula mi (respecto del origen del sistemainercial) es r˚` r` r1i y el centro de masa r˚` r. Como, por definicion de centro de masa,
(2.4), pr˚ ` rqNÿ
i“1
mi “Nÿ
i“1
mipr˚ ` r ` r1iq, deducimos queNÿ
i“1
mir1i “ 0. Por lo tanto,
M vptq “Nÿ
i“1
miviptq tal y como se querıa mostrar.

20 Modelizacion: Ejemplos y aplicaciones
Calculemos ahora el momento angular respecto Ot. Este toma la siguiente forma dondese omite la variable t para hacer la notacion mas compacta:
H “Nÿ
i“1
ri ˆmivi “Nÿ
i“1
pr` r1iq ˆmipv ` 9r1iq
“Nÿ
i“1
rˆmiv `Nÿ
i“1
r1i ˆmi 9r1i `˜
Nÿ
i“1
mir1i
¸ˆ v ` rˆ d
dt
ÿ
i“1
mir1i
(2.12)
Tal y como se ha visto mas arriba,Nÿ
i“1
mir1i “ 0, por lo que los dos ultimos sumandos de
la ecuacion (2.12) se anulan y ası
Hptq “ rptq ˆM vptq `Nÿ
i“1
r1iptq ˆmi 9r1iptq. (2.13)
Pero teniendo en cuenta que ΣNi“1mir
1iptq “ 0, el momento angular del sistema respecto
del centro de masa es
H1ptq “Nÿ
i“1
r1iptq ˆmiviptq “Nÿ
i“1
r1iptq ˆmipvptq ` 9r1iptqq
“Nÿ
i“1
mir1iptq ˆ vptq `
Nÿ
i“1
r1iptq ˆmi 9r1iptq “Nÿ
i“1
r1iptq ˆmi 9r1iptq.
Por lo tanto, el momento angular total del sistema respecto a Ot es el momento angular(respecto a Ot) de la masa total concentrada en el centro de masa, mas el momento angulardel sistema respecto al centro de masa. Ademas, si el centro de masa se encuentra enreposo (i.e., vptq “ 0), el momento angular sera independiente de la posicion del puntode referencia Ot y de su velocidad. En este caso, Hptq se reduce al momento angular delsistema tomado respecto del centro de masa. Diferenciando Hptq ´H1ptq “ rptq ˆM vptqobtenemos 9Hptq´ 9H1ptq “ 9rptqˆM vptq` rptqˆM 9vptq. En particular, si Ot es el centro demasa movil (i.e., rptq “ 0) entonces 9Hptq “ 9H1ptq. Esto significa que para calcular la razondel cambio del momento angular de un sistema respecto a su centro de masa, podemospensar en el centro de masa como si estuviera en reposo.
Finalmente, sean Fei ptq las fuerzas externas actuando sobre la partıcula de masa mi,
Feptq “Nÿ
i“1
Fei ptq la fuerza externa total y definamos el par de fuerza total respecto de Ot
como en (2.9) (observemos que rptq ` r1iptq es el vector que une Ot con mi):
Neptq “Nÿ
i“1
prptq ` r1iptqq ˆ Fei ptq.

2.3 Sistemas mecanicos de rotacion 21
Si Ne˚ptq es el par total respecto al origen del sistema inercial O˚ entonces, teniendo encuenta que, por (2.5), Fe
i ptq “M 9vptq llegamos a
Ne˚ptq “Nÿ
i“1
pr˚ptq ` rptq ` r1iptqq ˆ Fei ptq “ r˚ptq ˆ Fe
i ptq `Neptq“ r˚ptq ˆM 9vptq `Neptq.
(2.14)
Por otra parte, el momento angular total respecto a O˚ es
H˚ptq “Nÿ
i“1
pr˚ptq ` riptqq ˆmiviptq “ r˚ptq ˆÿ
i“1
miviptq `Nÿ
i“1
riptq ˆmiviptq“ r˚ptq ˆM vptq `Hptq,
(2.15)donde hemos usado (2.11) y (2.12). Ahora, por (2.10) y (2.14) tenemos que 9H˚ptq “Ne˚ptq “ Neptq ` r˚ptq ˆM 9vptq. Diferenciando en (2.15) se obtiene:
9Hptq “ 9H˚ptq ´ 9r˚ptq ˆM vptq ´ r˚ptq ˆM 9vptq“ Neptq ` r˚ptq ˆM 9vptq ´ 9r˚ptq ˆM vptq ´ r˚ptq ˆM 9vptq“ Neptq ´ v˚ptq ˆM vptq.
(2.16)
En particular, si Ot es el centro de masa movil, se tiene 9Hptq “ Neptq. En consecuencia,la razon del cambio respecto del tiempo del momento angular de una sistema de partıculasrespecto de su centro de masa es la suma de las pares de fuerza respecto del centro de masade todas las fuerzas externas, y ello, independientemente de si el centro de masa se estamoviendo (2.16) o permanece en reposo (2.10).
Hay una ley del momento angular para cuerpos rıgidos que complementa la segundaley de Newton. Dado que en los ejemplos solo vamos a considerar rotaciones en el plano,no la vamos a desarrollar en total generalidad para movimientos de rotacion en R3. Apartir de ahora consideramos sistemas rotacionales planos. Esto significa que todos loselementos considerados rotan alrededor de ejes que son paralelos entre sı y que todas lasfuerzas se restringen al plano. Considerese una partıcula de masa m rotando alrededorde un eje paralelo al eje z a traves de un punto fijo O “ px0, y0, 0q en el plano x, y. Searptq “ pxptq, yptq, 0q el vector de posicion de la partıcula respecto a O en el instante t ypx0, y0, 0q ` rptq “ px0, y0, 0q ` pxptq, yptq, 0q las coordenadas de la partıcula en el instantet. Puesto que la partıcula se mueve en una circunferencia en torno a O, la distancia dela partıcula a O, ||rptq|| “ ||pxptq, yptq, 0q|| “ pxptq2 ` yptq2q12, es constante. Llamamosr “ ||rptq||. Derivando respecto de t
xptq 9xptq ` yptq 9yptq “ 0.
Por lo tanto,9yptqxptq “ ´
9xptqyptq . Ası, existe un numero real wptq “ 9yptq
xptq “ ´9xptqyptq tal que
9rptq “ p 9xptq, 9yptq, 0q “ wptqp´yptq, xptq, 0q.

22 Modelizacion: Ejemplos y aplicaciones
Definimos wptq “ p0, 0, wptqq, que representa la velocidad angular de la partıcula alrede-dor de O en el instante t. Con w ası definida y usando la definicion del producto vectorial,se ve facilmente que
9rptq “ wptq ˆ rptq.Sea Nptq el par generado por una fuerza dad Fptq “ pF1ptq, F2ptq, 0q aplicada a la partıcula.Por (2.7) se tiene que
Nptq “ pxptqF2ptq ´ yptqF1ptqqk. (2.17)
Pongamos Nptq “ xptqF2ptq ´ yptqF1ptq de modo que Nptq “ Nptqk. Ahora, el momentoangular de la partıcula alrededor de O en el instante t es
Hptq “ rptq ˆm 9rptq “ rptq ˆmpwptq ˆ rptqq “ mp0, 0, wptqr2qy de (2.8) se deduce que la ecuacion del movimiento es
mr2 9wptq “ Nptq. (2.18)
De (2.17) y (2.18) se tiene que
xptqF2ptq ´ yptqF1ptq “ Nptq “ mr2 9wptq. (2.19)
Se define el momento de inercia de la partıcula alrededor de O como
J “ mr2.
Por lo tanto,
Nptq “ J 9wptq “ d
dtpJwptqq. (2.20)
Esta formula es el equivalente de la segunda ley de Newton para los cuerpos que rotan enel plano.
Hay una relacion muy estrecha entre las rotaciones en el plano y los movimientostraslacionales en una dimension. Los equivalentes rotacionales de masa, desplazamiento,velocidad y fuerza son momento de inercia, angulo o desplazamiento angular, velocidadangular y par de fuerza, respectivamente. La Tabla 2.2 presenta los sımbolos y leyes cons-titutivas de dichos elementos.
La inercia es una propiedad de un elemento que almacena la energıa cinetica delmovimiento rotacional. Cuando un par de fuerza se aplica a un cuerpo de inercia J , como
se ha visto en (2.20), Nptq “ d
dtpJwptqq donde wptq esta medida en radianes/segundos,
Nptq en newtons¨metros y J en kilogramos¨metros2.
Un muelle o resorte de torsion es un mecanismo que se opone a ser girado, desarrollan-do un par de fuerza proporcional al angulo de giro. Por lo tanto, Nptq “ kθptq donde θptqes el angulo de giro, medido en radianes y k es la constante del resorte torsional, medidaen newtons¨metros/radianes. Ejemplos cotidianos de muelles de torsion son una pinza decolgar la ropa o una trampa para ratones (Figura 2.7).

2.3 Sistemas mecanicos de rotacion 23
Sımbolo Ley Constitutiva Variables
d
dtpJwptqq “ Nptq wptq “ w12ptq velocidad angular
Nptq par aplicado respecto del eje
kθptq “ Nptqθptq “ θ12ptq “ θ2ptq´θ1ptq desplazamien-to angular relativo del muelle de torsionNptq par aplicado al muelle
cwptq “ Nptqwptq “ w12ptq “ w2ptq ´ w1ptq velocidadangular relativaNptq par aplicado al amortiguador
Tabla 2.2: Sımbolos y leyes constitutivas de masas, muelles y amortiguadores
Los amortiguadores viscosos rotacionales producen un par de fuerza que varıa enproporcion directa con la velocidad angular, Nptq “ cwptq, donde la constante de amorti-guacion c esta medida en newtons¨metros¨segundos/radianes.
Las leyes de interconexion para los elementos rotacionales son totalmente analogas alas de los sistemas lineales si los elementos que interaccionan rotan alrededor del mismoeje (no sirve para ejes paralelos, en general). Ası, el par de fuerza que realiza un elementosobre otro es de la misma magnitud pero de sentido contrario al que ejerce el segundosobre el primero.
Ejemplo 2.4 Sea un disco con momento de inercia J alrededor de su eje de rotacion. Estasuspendido de un soporte mediante un resorte de torsion de constante K y amortiguadorotacionalmente como en la Figura 2.8. Sea θptq el desplazamiento angular respecto de laposicion de reposo, wptq “ 9θptq la velocidad angular y T ptq el par de fuerza ejercido. Labarra que hace de eje de giro se modeliza como un resorte rotacional de constante K y elgiro se ve amortiguado por un amortiguador rotaciuonal de constante B. Como estos seoponen al giro, el diagrama de pares de fuerzas es el que se muestra en la Figura 2.8. Ası
Figura 2.7: Realizaciones fısicas de muelles de torsion

24 Modelizacion: Ejemplos y aplicaciones
Figura 2.8: Disco en giro sobre su eje y diagrama de pares de fuerza
pues, la segunda ley de Newton produce:
J :θptq “ ´B 9θptq ´Kθptq ` T ptq.O, equivalentemente,
J :θptq `B 9θptq `Kθptq “ T ptq.
Ejemplo 2.5 En la Figura 2.9 se representa un sistema mecanico de rotacion. Este des-cribe el comportamiento de un eje de transmision. El sistema consta de un motor cuyomomento de inercia es J3 y su angulo de giro es θ3. Ademas el motor efectua una fuerzauptq sobre el eje. El eje tiene dos engranajes con momentos de inercia J1 y J2, y angulosde giro θ1 y θ2. Los cojinetes que sostienen los engranajes se consideran amortiguadoresrotacionales con constante de mortiguacion c. Finalmente los diferentes tramos de eje setoman como resortes rotacionales con constantes de rigidez de torsion k1 y k2. El diagramade pares de las fuerzas que actuan se puede ver tambien en la Figura 2.9. Aplicando lasegunda ley de Newton rotacional obtenemos el siguiente sistema de ecuaciones:
J1:θ1ptq “ ´cp 9θ1ptq ´ 9θ2ptqq ´ k1pθ1ptq ´ θ2ptqq
J2:θ2ptq “ cp 9θ1ptq ´ 9θ2ptqq ` k1pθ1ptq ´ θ2ptqq ´ cp 9θ2 ´ 9θ3ptqq ´ k2pθ2ptq ´ θ3ptqq
J3:θ3ptq “ cp 9θ2 ´ 9θ3ptqq ` k2pθ2ptq ´ θ3ptqq ` uptq
O tambien
J1:θ1ptq ` cp 9θ1ptq ´ 9θ2ptqq ` k1pθ1ptq ´ θ2ptqq “ 0
J2:θ2ptq ´ cp 9θ1ptq ´ 9θ2ptqq ´ k1pθ1ptq ´ θ2ptqq ` cp 9θ2 ´ 9θ3ptqq ` k2pθ2ptq ´ θ3ptqq “ 0
J3:θ3ptq ´ cp 9θ2 ´ 9θ3ptqq ´ k2pθ2ptq ´ θ3ptqq “ uptq
Figura 2.9: Sistema de dos cuerpos en rotacion y su diagrama de pares de fuerzas

2.3 Sistemas mecanicos de rotacion 25
Se puede usar notacion matricial para escribir el sistema como una ecuacion diferencialmatricial de segundo orden de la forma M :qptq`C 9q`Kqptq “ fptq. En este caso concreto,
M “»–J1
J2
J3
fifl , C “
»–c ´c 0´c 2c ´c0 ´c c
fifl , K “
»–k1 ´k1 0´k1 k1 ` k2 ´k2
0 ´k2 k2
fifl ,
fptq “»–
00uptq
fifl y qptq “
»–θ1ptqθ2ptqθ3ptq
fifl .
Las matrices M , C y K reciben los nombres de matrices masa o inercia, amortiguamientoy rigidez, respectivamente.
Ejemplo 2.6 (Pendulo) Considerese un pendulo de longitud l y masa m suspendido deun punto fijo O como en la figura.
Figura 2.10: Pendulo modelizado como masa puntual
Vamos a modelizar el pendulo como una masa puntual m sujeta a una barra rıgida sinmasa de longitud l que rota en el plano alrededor de O sin friccion. Supongamos queel angulo desde la vertical hacia abajo hasta la barra es θ. Se considera positivo en ladireccion dibujada en la Figura 2.10; es decir, la opuesta al movimiento (habitual) de lasagujas de un reloj.
Puesto que pensamos en el pendulo como una masa puntual en rotacion en el planorespecto al punto 0, su momento de inercia es J “ ml2. Por otra parte, la unica fuerzaque actua sobre el pendulo es la de la gravedad mg, y lo hace en la direccion del eje y perocon sentido negativo. Por (2.17) Nptq “ xptqp´mgq “ l sen θptqp´mgq “ ´mgl sen θptq esel par de la fuerza de gravedad sobre el pendulo. Usando la segunda ley de Newton de lossistemas rotacionales, J :θptq “ Nptq, obtenemos la siguiente ecuacion
ml2 :θptq “ ´mgl sen θptq.Simplificando,
l:θptq ` g sen θptq “ 0.
Esta es una ecuacion diferencial no lineal de orden 2.

26 Modelizacion: Ejemplos y aplicaciones
Ejemplo 2.7 (Sistema carro-pendulo) Considerese un pendulo que rota alrededor deun pivote situado en un carro. El carro tiene masa M y circula en un raıl horizontal empu-jado por una fuerza βuptq. Existe friccion viscosa entre el carro y el raıl. El centro de masadel pendulo esta a una distancia l del pivote y el momento de inercia del pendulo alrededorde su centro de masa es J . Tambien existe friccion viscosa en el pivote. La posicion delcarro se mide por el desplazamiento horizontal r de su centro de masa (que suponemos quecoincide con la localizacion del pivote) al origen de un sistema de coordenadas. La posiciondel pendulo se mide por el desplazamiento angular θ de la lınea que une su centro de masacon el pivote desde la vertical hacia abajo, es decir, medida en la direccion contraria a lasagujas del reloj. Suponemos que el movimiento del carro es unidimensional (los pares defuerza generados por todas las fuerzas que actuan en el carro estan en equilibrio).
Las fuerzas verticales que actuan sobre el carro son las fuerzas de contacto w1ptq, w2ptqa traves de las ruedas del carro, la fuerza gravitacional Gptq y la componente vertical dela fuerza de contacto (desconocida) F2ptq en el pivote. Como hemos supuesto que el carrosolo tiene movimiento unidimensional, estas estan en equilibrio.
Las fuerzas horizontales sobre el carro son βuptq, la friccion viscosa ´c 9rptq y la com-ponente horizontal de la fuerza de contacto (desconocida) F1ptq en el pivote. Ası,
M :rptq “ βuptq ´ c 9rptq ` F1ptq. (2.21)
Para describir el movimiento en el plano del pendulo, sean pxptq, yptqq las coordenadasde la masa puntual del pendulo en el momento t. Por lo tanto, xptq “ rptq ` l sen θptq yyptq “ ´l cos θptq. Las ecuaciones de los movimientos horizontales y verticales del penduloson
m:xptq “ ´F1ptq ô md2
dt2prptq ` l sen θptqq “ ´F1ptq
m:yptq “ ´mg ` F2ptq ô md2
dt2p´l cos θptqq “ ´mg ` F2ptq
Calculando las derivadas segundas se obtiene
m´
:rptq ` l:θptq cos θptq ´ l 9θptq2 sen θptq¯“ ´F1ptq
ml´l:θptq sen θptq ` 9θptq2 cos θptq
¯“ ´mg ` F2ptq.
(2.22)
2.3 Sistemas mecanicos de rotacion 27
Queda por determinar la rotacion del pendulo alrededor de su centro de masa. Lafuerza gravitacional no produce par en el pendulo alrededor de pxptq, yptqq (la distanciaes 0). Ası que la rotacion del pendulo esta determinada por el par de la fuerza Fptq “p´F1ptq, F2ptqq alrededor de pxptq, yptqq. El vector desde pxptq, yptqq al pivote en el que seaplica la fuerza Fptq esta dado por p´l sen θptq, l cos θptqq, ası que el par de Fptq alrededorde pxptq, yptqq es ´F2ptql sen θptq ` F1ptql cos θptq (ver (2.17)). Suponiendo una friccionrotacional en el eje de giro del pendulo de constante cP , la ecuacion del movimientorotacional es
J :θptq “ ´F2ptql sen θptq ` F1ptql cos θptq ´ cP 9θptq. (2.23)
Despejando F1ptq y F2ptq en (2.22) y sustituyendo en (2.21) y (2.23) el comportamientodinamico del sistema carro-pendulo queda descrito por las ecuaciones
"Mpθq:r “ pJ `ml2qpβu´ c 9r `ml 9θ2 sen θq `ml cos θpmgl sen θ ` cP 9θqMpθq:θ “ ´ml cos θpβu´ c 9r `ml 9θ2 sen θq ´ pM `mqpcp 9θ `mgl sen θq (2.24)
donde Mpθq “ pM `mqJ `ml2M `m2l2 sen2 θ.
La variable de entrada de este sistema es βuptq y las variables de salida rptq y θptq. Si9rp0q “ 9θp0q “ 0, θp0q “ 0 o π y uptq “ 0 el sistema permanecera en reposo.
Una aplicacion de este sistema es una grua con un gancho suspendido de un carrodesplazandose a lo largo de un raıl horizontal. Estas gruas operan alrededor de la posicionvertical del pendulo y requieren estar cerca de esta direccion antes de depositar la carga.Un problema de control serıa llevar el pendulo en posicion de equilibrio (θ “ 0) a cualquierpunto r0 en un tiempo finito (controllability problem).
Ejemplo 2.8 (Pendulo invertido) Considerese un pendulo invertido de la Figura 2.11Vamos a escribir las ecuaciones del movimiento en funcion del angulo ϕptq. En vez dehacer todo el desarrollo como en el ejemplo anterior, observamos que si en permitimosque el pendulo pueda girar 2π radianes entonces se trata del mismo sistema. La unicadiferencia es la forma en que se miden los angulos en cada caso. Ahora bien, si px, yq sonlas coordenadas de un punto arbitrario en el que el pendulo se pueda encontrar en algunmomento; es decir, un punto de la circunferencia de centro en el pivote y radion l, entoncesen funcion de ϕ, x “ l senϕ, y “ l cosϕ. Y en funcion de θ: x “ l sen θ, y “ ´l cos θ. Enconsecuencia, basta hacer el cambio de variable θptq “ π ´ ϕptq en (2.24).
"Mpϕq:r “ pJ `ml2qpβu´ c 9r `ml 9ϕ2 senϕq ´ml cosϕpmgl senϕ´ cP 9ϕqMpϕq :ϕ “ ´ml cosϕpβu´ c 9r `ml 9ϕ2 senϕq ` pM `mqp´cp 9ϕ`mgl senϕq.

28 Modelizacion: Ejemplos y aplicaciones
Figura 2.11: Pendulo invertido sobre carro
La variable de entrada es βuptq y las variables de salida rptq y ϕptq. Un problema decontrol serıa disenar un regulador que mantenga el pendulo en posicion vertical (ϕ “ 0)en cualquier punto (r0). El regulador o controlador acepta como entradas las salidas delsistema (rptq y ϕptq) y devuelve como salida la entrada uptq que estabiliza el pendulo(stabilization problem).
Una aplicacion de este modelo es el controlar un cohete en posicion vertical.
Otros sistemas mecanicos de rotacion son la bicicleta en giro (ver [1, Section 3.2]), elsegway y el despegue de un cohete espacial (ver [1, Section 2.1]).
Si se desea consultar informacion sobre sistemas mecanicos de traslacion y rotacionen 3 dimensiones se recomienda el enlace [19]. Un ejemplo de ello es un satelite en orbitageoestacionaria.
2.4. Circuitos electricos
Un circuito electrico es un recorrido preestablecido por el que se desplazan cargaselectricas. Las cargas electricas, Q, que constituyen una corriente electrica, pasan de unpunto que tiene mayor potencial electrico a otro que tiene un potencial inferior. Para man-tener permanentemente esa diferencia de potencial, llamada tambien voltaje o tension, V ,entre los extremos de un conductor, se necesita un dispositivo llamado generador (pila,baterıa, dinamo, alternador, ...) que tome las cargas que llegan a un extremo y las impulsehasta el otro. El flujo de cargas electricas por un conductor constituye una corriente electri-

2.4 Circuitos electricos 29
ca. Se define la intensidad de corriente electrica, I, como la cantidad de carga electricaque circula por una seccion de un conductor en la unidad de tiempo. Por lo tanto,
I “ dQ
dt.
En el sistema metrico internacional las cargas se miden en culombios, las diferencias depotencial o voltaje se miden en voltios y las instensidades de corriente en amperios.
Un circuito electrico esta formado por un cable conductor que conecta elementos. Loselementos clasicos de un circuito son resistores, inductores y condensadores. El comporta-miento de cada elemento esta gobernado por una ley fısica simple, que se llama ecuaciono ley constitutiva del elemento.
Los resistores o resistencias son conductores hechos de un material homogeneo enforma de cilindro que resisten el (se opoenen al) flujo de la corriente, ası que crean unadiferencia de voltaje a traves de ellos. La resistencia del resistor R depende de la conduc-tividad del material σ, de la longitud del cilindro l y del area de la seccion transversal al
mismo S, es decir, R “ l
σS. La ley de Ohm establece que la caıda de voltaje V a traves
de un resistor de resistencia R es proporcional a la corriente I, es decir, V “ IR. Laresistencia se mide en ohmios (Ω). Ejemplos de resistores son las planchas, las bombillas,etc.
Un condensador es un dispositivo formado por dos superficies o placas conductorasparalelas sometidas a una diferencia de potencial V , que adquieren una determinada cargaelectrica Q, positiva en una de ellas y negativa en la otra, siendo nula la variacion de cargatotal. Sirven para almacenar energıa electrica. La carga almacenada en una de las placas esproporcional a la diferencia de potencial entre esta placa y la otra, siendo la constante deproporcionalidad la llamada capacitancia C, es decir, Q “ CV . En el sistema internacionalde unidades la capacitancia se mide en faradios (F ).
Un inductor es un conductor, por ejemplo un cable, enrollado en una bobina. Cuandouna corriente fluye a traves de el, la energıa se almacena temporalmente en un cam-po magnetico en la bobina. Cuando la corriente a traves del inductor cambia el campomagnetico, que varıa en el tiempo, induce un voltaje en el conductor de acuerdo con laley de Faraday. El voltaje V a traves de un inductor de inductancia L es proporcionala la tasa de cambio con respecto al tiempo de la corriente I que pasa a traves de el, es
decir, V “ LdI
dt. La inductancia se mide en henrios (H). Ası como la resistencia mide
la oposicion a la corriente, la inductancia es una medida de la oposicion al cambio en lacorriente.
La Tabla 2.3 resume los elementos de un circuito electrico junto con sus leyes consti-tutivas.
Ademas de la leyes constitutivas de los elementos idealizados de un circuito electrico,hay que tener en cuenta las leyes de interconexion entre estos elementos. Estas se llamanlas leyes de Kirchoff:

30 Modelizacion: Ejemplos y aplicaciones
Sımbolo Ley Constitutiva Variables
V1 ´ V2 “ L 9IDiferencia de voltaje a traves de una bo-bina o inductor de inductancia L con unaintensidad de corriente I
V1 ´ V2 “ Q
C
Diferencia de voltaje a traves de un con-densador de capacitancia C con carga Qen una de las placas y ´Q en la otra.
V1 ´ V2 “ IRDiferencia de voltaje a traves de un reosta-to de resistencia R con una intensidad decorriente I
Tabla 2.3: Sımbolos y leyes constitutivas de reostatos, condensadores y bobinas
Ley de corrientes de Kirchoff, ley de nodos de Kirchoff o primera ley de Kirchoff:“La suma de las corrientes que concurren en un nodo es cero”, donde un nodo es unpunto de un circuito donde concurren mas de dos conductores (cables).
Ley de tensiones o voltajes de Kirchoff, ley de lazos de Kirchoff o segunda ley deKirchoff: “La suma de las diferencias de potencial en cualquier lazo o ciclo es cero”,donde un lazo o ciclo es cualquier camino cerrado en un circuito electrico.
Ejemplo 2.9 (Circuito RLC) Considerese un circuito como en la Figura 2.12. La ley devoltajes de Kirchoff establece que la suma de las caıdas de voltaje a traves de cada elementoes igual al voltaje suministrado eptq. Si las caıdas de voltaje en el tiempo t a traves delresistor, condensador y bobina son VRptq, VCptq y VLptq respectivamente, entonces
eptq ´ VRptq ´ VCptq ´ VLptq “ 0, t ě 0.
Figura 2.12: Circuito RLC

2.4 Circuitos electricos 31
masa bobina muelle condensador amortiguador resistor
M L k 1C c R
F V1 ´ V2 F V1 ´ V2 F V1 ´ V2
v I y Q v I
F “Mv V1 ´ V2 “ L 9I F “ ky V1 ´ V2 “ QC F “ cw V1 ´ V2 “ IR
T “ pM2qv2 W “ pL2qI2 W “ pk2qy2 W “ Q2p2Cq D “ cv2 W “ RI2
Tabla 2.4: Tabla de equivalencias entre sistemas mecanicos y circuitos electricos
Ahora bien, si la corriente en el tiempo t es Iptq y la carga en el condensador es Qptqentonces
VRptq “ IptqR, VCptq “ QptqC, VLptq “ L 9Iptq, Iptq “ 9Qptq, t ě 0.
Por lo tanto,
L :Qptq `R 9Qptq ` 1
CQptq “ eptq, t ě 0.
La variable de entrada de este sistema es el voltaje suministrado eptq mientras que lavariable o variables de salida dependen de lo que se quiera observar o controlar. Porejemplo, podrıamos tener interes en mantener la corriente Iptq “ 9Qptq constante en elcircuito.
Si se escriben la leyes constitutivas de los elementos de un circuito electrico en terminosde la carga, se obtiene V1´V2 “ L :Q para el caso del inductor, V1´V2 “ R 9Q para el caso
del resistor y V1 ´ V2 “ 1
CQ para el caso del condensador. Notese la analogıa que existe
entre estas leyes y las de los sistemas mecanicos. Estas se presentan en la Tabla 2.4. Esdecir, los inductores, condensadores y resistores son los equivalentes a las masas, muellesy amortiguadores en los sistemas mecanicos traslacionales. La tabla anterior es la tabla deanalogıa fuerza-voltaje.
Ejemplo 2.10 Recuerdese que el sistema mecanico de la izquierda en la Figura 2.13 seestudio en la Seccion 2.2. Vimos que las ecuaciones del movimiento de este sistema son
Figura 2.13: Un sistema mecanico y un circuito eleectrico analogos

32 Modelizacion: Ejemplos y aplicaciones
M1:y1ptq `Bp 9y1ptq ´ 9y2ptqq `Kpy1ptq ´ y2ptqq “ fptqM2:y2ptq `Bp 9y2ptq ´ 9y1ptqq `Kpy2ptq ´ y1ptqq “ 0.
(2.25)
Utilizando la analogıa fuerza-voltaje de la Tabla 2.4, el circuito electrico de la derecha en laFigura 2.13 es el analogo del sistema mecanico de la izquierda. Efectivamente, consideremoslos dos lazos especificados en la figura y sean I1ptq, I2ptq e I3ptq las corrientes que circularen el instante t por la bobina M1, la bobina M2 y la resistencia B y el condensador 1k,respectivamente. Entonces, por la 1a ley de Kirchoff, I3ptq “ I1ptq ´ I2ptq. Y por la 2a leyaplicada a los lazos con caıdas de potencial v1ptq y v2ptq:
fptq ´M1dI1
dt´B I3ptq ´ Q3ptq
1K “ 0
´M2dI2
dt`B I3ptq ` Q3ptq
1K “ 0
Para la eleccion de los signos recuerdese que las caıdas de potencial son positivas enla direccion opuesta a la direccion de la corriente. Como la corriente en el primer lazocircula en la direccion especificada por la flecha, la diferencia de potencial en M1, B y1K es negativa. Sin embargo, en el segundo lazo, la direccion de la corriente en M2 esla misma que la de la flecha, pero opuesta a ella en B y 1K. Teniendo ahora en cuentaque Q3ptq “ Q1ptq ´ Q2ptq y que Iptq “ 9Qptq, obtenemos facilmente las ecuanciones quedeterminan la carga en cada uno de los dos lazos en cada instante de tiempo:
M1:Q1ptq `Bp 9Q1ptq ´ 9Q2ptqq `KpQ1ptq ´Q2ptqq “ fptq
M2:Q2ptq `Bp 9Q2ptq ´ 9Q1ptqq `KpQ2ptq ´Q1ptqq “ 0.
Estas ecuaciones son, de acuerdo a la Tabla 2.4, analogas a las de (2.25) .
2.4.1. Modelo basado en circuitos electricos: Amplificadores operacio-nales
Un amplificador operacional (op amp) es un dispositivo electronico disenado para am-plificar senales, es decir, para elevar el valor de la tension o corriente de una senal variableen el tiempo. Originalmente se empleaban para realizar operaciones matematicas (sumas,restas, multiplicaciones, divisiones, derivadas, integrales, ...) en calculadoras analogicas(de ahı su nombre). Consta de dos entradas: la entrada invertida o inversora v´ y la noinvertida v`. Tiene una salida vout, que es la diferencia entre las dos entradas multiplicada
por un factor llamado ganancia, k, es decir, vout “ kpv`´v´q o k “ voutv` ´ v´ . Se alimenta
mediante una tension simetrica (dos fuentes de tension).

2.4 Circuitos electricos 33
Este amplificador operacional es de lazo abierto. Puede conseguir ganancias muy grandespero es inestable y difıcil de controlar. Es por ello por lo que nos podemos permitir perderganancia conectando componentes externos, tales como resistores o condensadores, entresus terminales de entrada y salida que nos producen un amplificador estable. Estos com-ponentes determinan la operacion que realiza el amplificador. En [20] se puede obtenermas informacion sobre los amplificadores operacionales.
Un amplificador operacional inversor es aquel que usa realimentacion negativa, estoes, una fraccion de la senal de salida vuelve a la terminal negativa de la entrada usando unresistor externo. Esta conexion es un lazo cerrado que hace que la diferencia de potencialen la entrada tienda a cero de la siguiente forma: cuando la tension en la salida se eleva, latension en la terminal negativa tambien se eleva, por lo que v`´ v´ disminuye y la salidadisminuye. Este proceso se estabiliza y v` ´ v´ va disminuyendo y tendiendo a cero. Enlos amplificadores operacionales inversores ideales supondremos que v`´ v´ “ 0 y que noentra corriente en las terminales de entrada. Ası, podemos obtener una ecuacion para laganancia de un amplificador inversor.
Con la notacion del dibujo, estamos suponiendo i0 “ 0 y v “ v´ ´ v` “ 0. Utilizando la
primera ley de Kirchoff, se cumple que IR1 ´ IR2 “ 0, lo que es equivalente av1 ´ 0
R1“
0´ v2
R2. Por lo tanto, v2 “ R2
R1p´v1q. Ası, la ganancia del amplificador inversor es
kinv “ v2
´v1“ R2
R1.
Ahora bien, si seguimos suponiendo i0 “ 0 pero v ‰ 0 aunque pequena se cumple quev1 ´ vR1
“ v ´ v2
R2. Por lo tanto
v “ R1
R1 `R2
ˆR2
R1v1 ` v2
˙.
Sustituyendo v por ´v2k, donde k es la ganancia en lazo abierto (vista al principio deesta seccion) se obtiene
v2 “ ´k R1
R1 `R2
ˆR2
R1v1 ` v2
˙.

34 Modelizacion: Ejemplos y aplicaciones
Esto es lo que esta representado en el diagrama de bloques de la parte derecha de la ultimafigura. Manipulando la ecuacion anterior se obtiene que la ganancia del lazo cerrado es
kcl “ ´v2
v1“ R2
R1
kR1
R1 `R2 ` kR1.
Notese que si k, la ganancia en lazo abierto, es grande entonces la ganancia en lazo cerrado
kcl es la misma que kinv, es decir, lımkÑ8 kcl “ kinv. Ademas, si
R2
R1“ 100 y k “ 106
una variacion en la ganancia en lazo abierto grande, por ejemplo pasar a k1 “ 2 ¨ 106,produce una variacion en la ganancia en lazo cerrado pequena: kcl “ 99,989901 a k1cl “99,99495. Esto es un ejemplo de como se puede usar la realimentacion para hacer precisoslos sistemas con componentes con incertidumbre. Aquı, a traves de la realimentacion, sepasa de ganancia alta y poca robustez a disminuir la ganancia pero aumentar la robustez.
El amplificador aditivo sirve para combinar el voltaje presente en varias entradas enuna unica salida.
Por la primera ley de Kirchoff, I1 ` I2 ` I3 “ IF . Suponiendo que el voltaje en x es cero,
tenemos que I1 “ v1
R1, I2 “ v2
R2, I3 “ v3
R3y IF “ ´vout
RF. Ası
vout “ ´RF IF “ ´RF pI1`I2`I3q “ ´RFˆv1
R1` v2
R2` v3
R3
˙“ ´
ˆRFR1
v1 ` RFR2
v2 ` RFR3
v3
˙.
Aplicaciones del amplificador aditivo son un mezclador de sonidos, un conversor digitalanalogico, etc.
El amplificador integrador tiene la siguiente estructura
Suponemos que el voltaje en x es cero. Por la primera ley de Kirchoff se cumple que
Iin “ If . Por ota parte, Iin “ vinRin
y 0´ vout “ Q
C“
żIfCdt “
żIinCdt “
żvinRinC
dt. Ası,
vout “ ´ 1
RinC
żvindt

2.5 Otros sistemas 35
La estructura del amplificador diferenciador es
Suponemos que el voltaje en x es cero. Por la primera ley de Kirchoff se cumple que
Iin “ If . Ademas, vin ´ 0 “ Q
C“
żIfCdt y 0 ´ vout “ IfRf . Por lo tanto, derivando en
la primera expresion se obtiene If “ Cdvindt
y sustituyendo este resultado en la segunda
expresion vout “ ´RfCdvindt
. Ası,
vout “ ´RfCdvindt
.
Ya vemos que los amplificadores operacionales son muy versatiles y que se puedenconstruir diferentes mediante distintas combinaciones de resistores y condensadores.
2.5. Otros sistemas
2.5.1. Dinamica del sistema insulina-glucosa
Es esencial que la concentracion de glucosa en sangre se mantenga entre 0.7 y 1.1gramos/litro. La concentracion de glucosa esta influenciada por muchos factores como laingestion de comida, la digestion y el ejercicio. El cuerpo humano tiene un mecanismosofisticado que regula la concentracion de glucosa en sangre. El pancreas se encarga deello, segregando las hormonas insulina y glucagon.

36 Modelizacion: Ejemplos y aplicaciones
La insulina hace que el nivel de glucosa en sangre baje. Se han desarrollado multiplesmodelos de diferente grado de complejidad. Uno relativamente simple es el minimal model(ver [3] o [21])
dx1
dt“ ´pp1 ` x2qx1 ` p1ge
dx2
dt“ ´p2x2 ` p3pu´ ieq
uptq= insulina en la sangre
ie, ge valores de equilibrio de insulina y glucosa
x1= concentracion de glucosa en sangre
x2= proporcional a la concentracion de insulina en el lıquido intersticial
p1, p2, p3= parametros.
La insulina en sangre esta considerada como una variable de entrada (se puede inyectar deforma intravenosa). El termino ´x1x2 es una interaccion entre la concentracion de glucosae insulina de signo negativo pues la insulina baja la concentracion de glucosa en sangre.Los parametros se determinan experimentalmente, dependiendo de la poblacion que sequiera modelizar: diabeticos o no, personas mayores o jovenes, etc.
Las siguientes graficas muestran la respuesta del cuerpo a una inyeccion intravenosade glucosa en el tiempo t “ 0. La concentracion de glucosa en ese instante es alta pero vadescendiendo pues el pancreas reacciona rapidamente segregando insulina. Los niveles deglucosa e insulina van disminuyendo hacia sus puntos de equilibrio.
2.5.2. Producto Interior Bruto
En esta seccion vamos a presentar un modelo dinamico en tiempo discreto. General-mente los datos economicos no son continuos sino que suelen estar acumulados en periodosde tiempo (anos, meses, dıas, ...).

2.5 Otros sistemas 37
El producto interior bruto (PIB) es una magnitud macroeconomica que expresa elvalor monetario de la produccion de bienes y servicios de demanda final de un paıs (o unaregion) durante un perıodo determinado de tiempo (normalmente un ano).
Veamos el modelo Samuelson-Hicks multiplier-accelerator (consultar por ejemplo [8]).Las variables basicas que utiliza son:
P ptq: PIB en el ano t
Cptq: consumo en el ano t
Iptq: inversion en el ano t
Gptq: gasto publico en el ano t.
Este modelo no tiene en cuenta las importaciones y exportaciones. Hace las siguientessuposiciones:
1. El PIB es la suma del consumo, la inversion y el gasto publico, es decir,
P ptq “ Cptq ` Iptq `Gptq, t P N.
2. El consumo del ano t` 1 depende solo del PIB de los dos anos previos, es decir,
Cpt` 1q “ fpP ptq, P pt´ 1qq.
3. La inversion en el ano t` 1 solo depende del incremento del PIB desde el ano t´ 1al t, es decir,
Ipt` 1q “ hpP ptq ´ P pt´ 1qq.
Sutituyendo las dos ultimas ecuaciones en la primera se obtiene
P pt` 1q “ fpP ptq, P pt´ 1qq ` hpP ptq ´ P pt´ 1qq `Gpt` 1q.Esta es una ecuacion en diferencias de orden 2 que puede ser no lineal. Conocidos Gptqpara t “ 2, 3, . . ., P p0q y P p1q se puede resolver recursivamente, de tal forma que se puedeobtener P ptq para t “ 2, 3, . . .. Ası, Gptq es una variable de entrada y P ptq de salida.Un posible objetivo del gobierno puede ser regular el PIB, el consumo y la inversionmanteniendo estas variables tan proximas como se pueda a unos valores previamentefijados denotados por P ˚ptq, C˚ptq y I˚ptq. Si N denota el horizonte temporal que noshemos fijado, se tratarıa de minimizar la siguiente funcion de coste de las desviacionesrespecto de los objetivos
J “Nÿ
t“1
rg1pP ptq ´ P ˚ptqq2 ` g2pCptq ´ C˚ptqq2 ` g3pIptq ´ I˚ptqq2s
donde los coeficientes g1, g2 y g3 reflejan la importancia relativa de cada objetivo. Este esun ejemplo de un “quadratic control optimization problem”.

38 Modelizacion: Ejemplos y aplicaciones
2.5.3. Calentamiento de una barra metalica
Sea una barra metalica que se calienta mediante chorros de calor a lo largo de ella, cuyaintensidad puede ser controlada. Supongase que pr, ϕ, xq son sus coordenadas cilındricas yque podemos pensar en la intensidad de los chorros como una funcion vpx, tq (no dependede ϕ). Suponemos tambien que la conductividad termometrica de la barra α es constantey que la distribucion inicial de la temperatura en el tiempo t “ 0 es independiente de ϕ.Sea Θpx, tq la temperatura media en el corte transversal de la barra, C la temperatura dereferencia y upx, tq “ Θpx, tq ´ C.
Supongamos que se satisfacen las condiciones de la figura. Esto se puede modelizar ma-tematicamente usando la ecuacion del calor
BuBt px, tq “ α
B2u
Bx2px, tq ` vpx, tq,
upx, 0q “ fpxq, up0, tq “ 0 “ upl, tqEsta es una ecuacion diferencial en derivadas parciales. La variable de entrada es la in-tensidad del calor aplicado vpx, tq y la variable de salida es la temperatura upx, tq. Unproblema de control es controlar la temperatura de la barra en cada punto en un intervalode tiempo determinado.