Bloque2 Movimiento Relativo
23
BLOQUE 2: MOVIMIENTO RELATIVO BLOQUE 2: Movimiento relativo • Sistemas de referencia en traslación • Sistemas de referencia en rotación
-
Upload
mereliitha -
Category
Documents
-
view
227 -
download
1
description
2
Transcript of Bloque2 Movimiento Relativo
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: MOVIMIENTO RELATIVO
BLOQUE 2: Movimiento relativo
• Sistemas de referencia en traslación
• Sistemas de referencia en rotación
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo
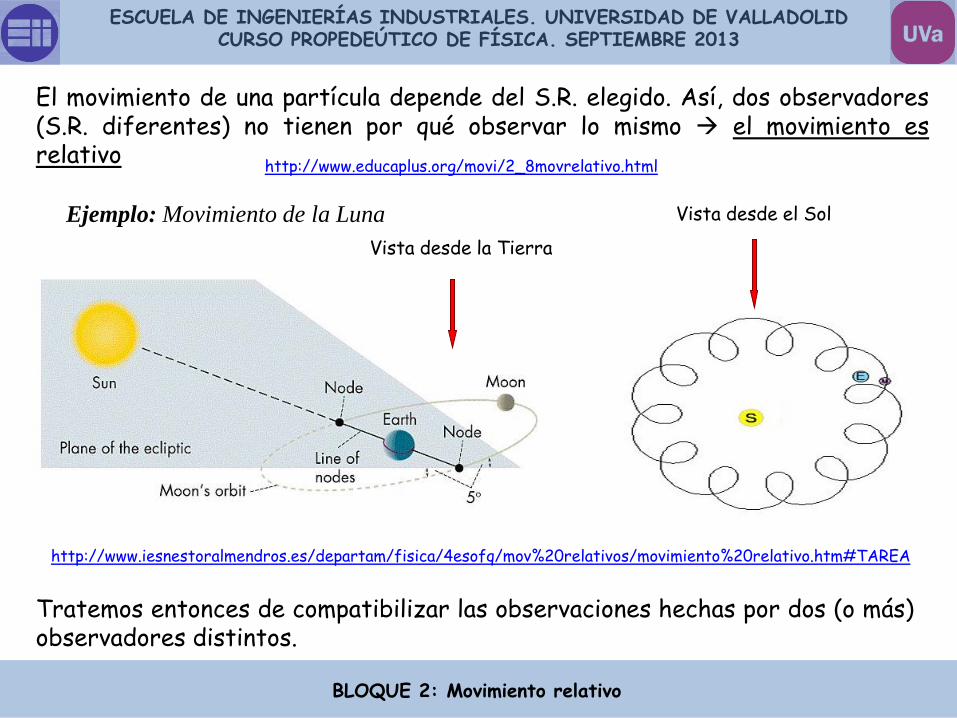
El movimiento de una partícula depende del S.R. elegido. Así, dos observadores (S.R. diferentes) no tienen por qué observar lo mismo el movimiento es relativo
Vista desde el Sol
Vista desde la Tierra
http://www.iesnestoralmendros.es/departam/fisica/4esofq/mov%20relativos/movimiento%20relativo.htm#TAREA
Tratemos entonces de compatibilizar las observaciones hechas por dos (o más) observadores distintos.
Ejemplo: Movimiento de la Luna
http://www.educaplus.org/movi/2_8movrelativo.html
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
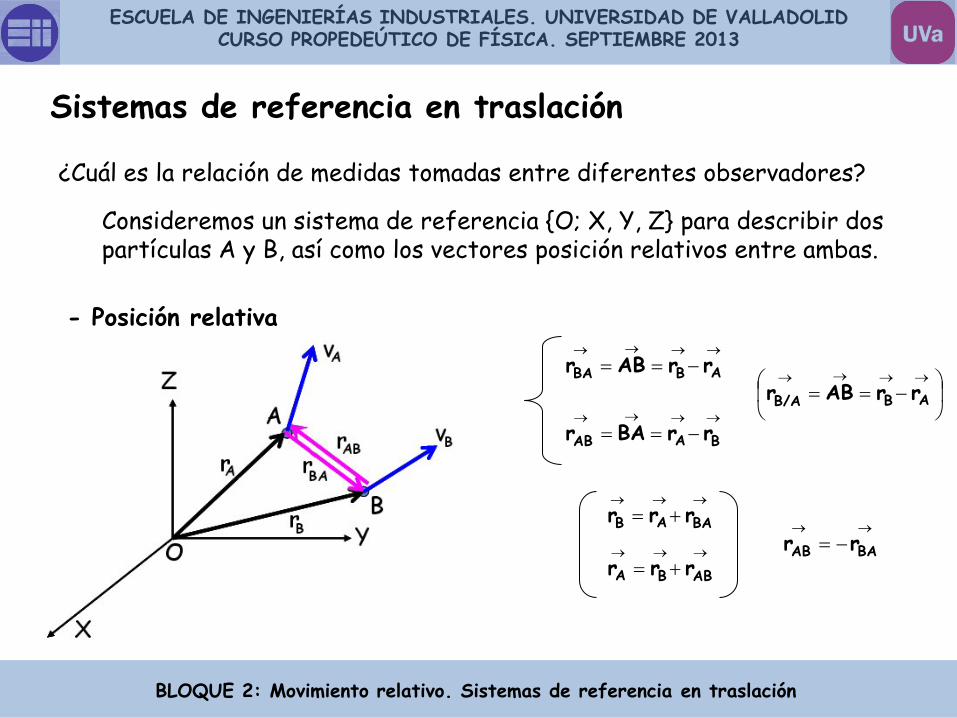
Sistemas de referencia en traslación
¿Cuál es la relación de medidas tomadas entre diferentes observadores?
Consideremos un sistema de referencia O; X, Y, Z para describir dos partículas A y B, así como los vectores posición relativos entre ambas.
→→→→−== ABBA rrABr
−==→→→→
ABB/A rrABr→→→→
−== BAAB rrBAr
→→−= BAAB rr
→→→+= BAAB rrr
→→→+= ABBA rrr
- Posición relativa
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
→→→→
→→→
→−=−=
−== BA
BABA
ABAB vv
rrrrr
vdtd
dtd
dtd
dtd
→→→→
→→→
→−=−=
−== AB
ABAB
BABA vvrr
rrr
vdt
ddtd
dtd
dtd
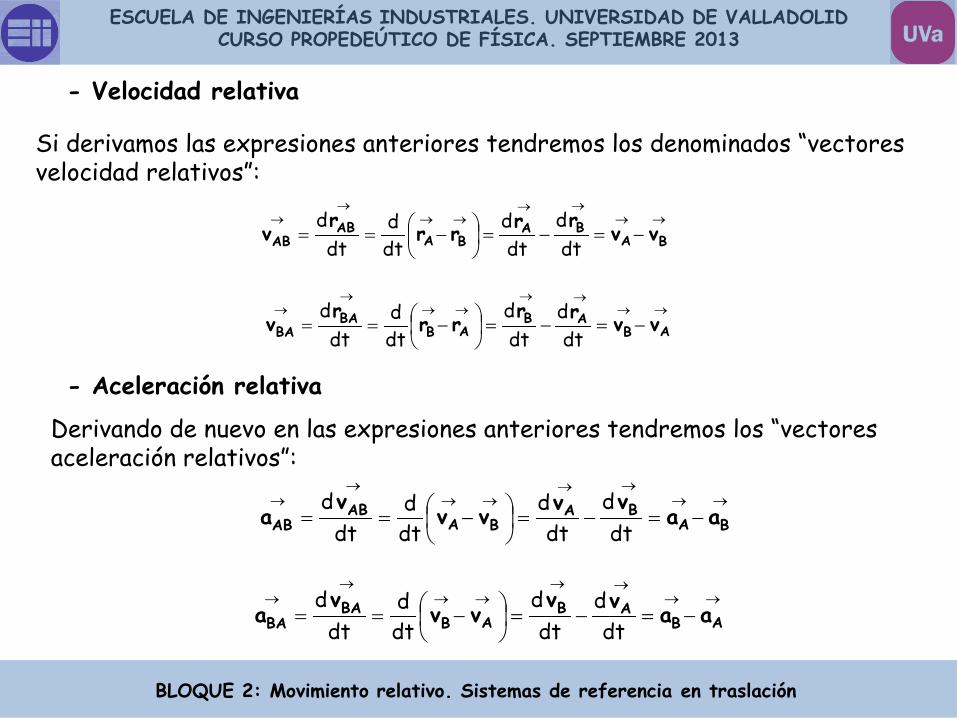
Si derivamos las expresiones anteriores tendremos los denominados “vectores velocidad relativos”:
- Aceleración relativa
→→→→
→→→
→−=−=
−== BA
BABA
ABAB aa
vvvvv
adt
ddt
ddtd
dtd
→→→→
→→→
→−=−=
−== AB
ABAB
BABA aavv
vvv
adt
ddt
ddtd
dtd
Derivando de nuevo en las expresiones anteriores tendremos los “vectores aceleración relativos”:
- Velocidad relativa
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
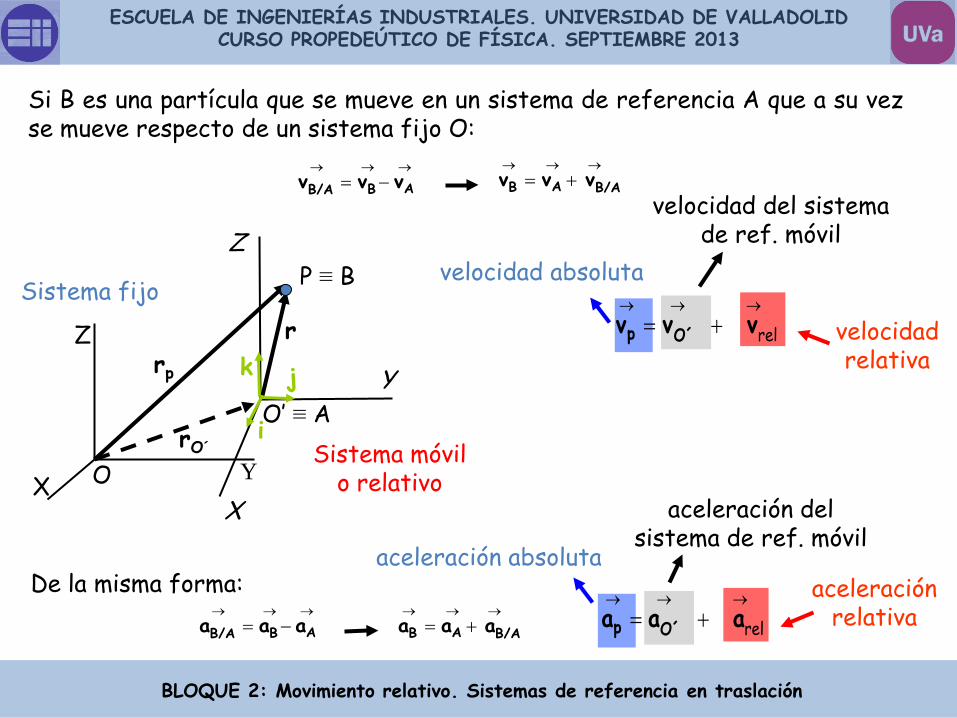
Si B es una partícula que se mueve en un sistema de referencia A que a su vez se mueve respecto de un sistema fijo O:
velocidad absoluta
velocidad del sistema de ref. móvil
velocidad relativa
→→→+= rel v vv O´p
X Y
Z
O’ ≡ A
rp
X
Z
O
Y
r
rO´ i
k j
P ≡ B
→→→−= ABB/A vvv
→→→+= B/AAB vvv
Sistema fijo
Sistema móvil o relativo
De la misma forma: aceleración absoluta
aceleración del sistema de ref. móvil
aceleración relativa
→→→+= rela aa O´p
→→→−= ABB/A aaa
→→→+= B/AAB a aa
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
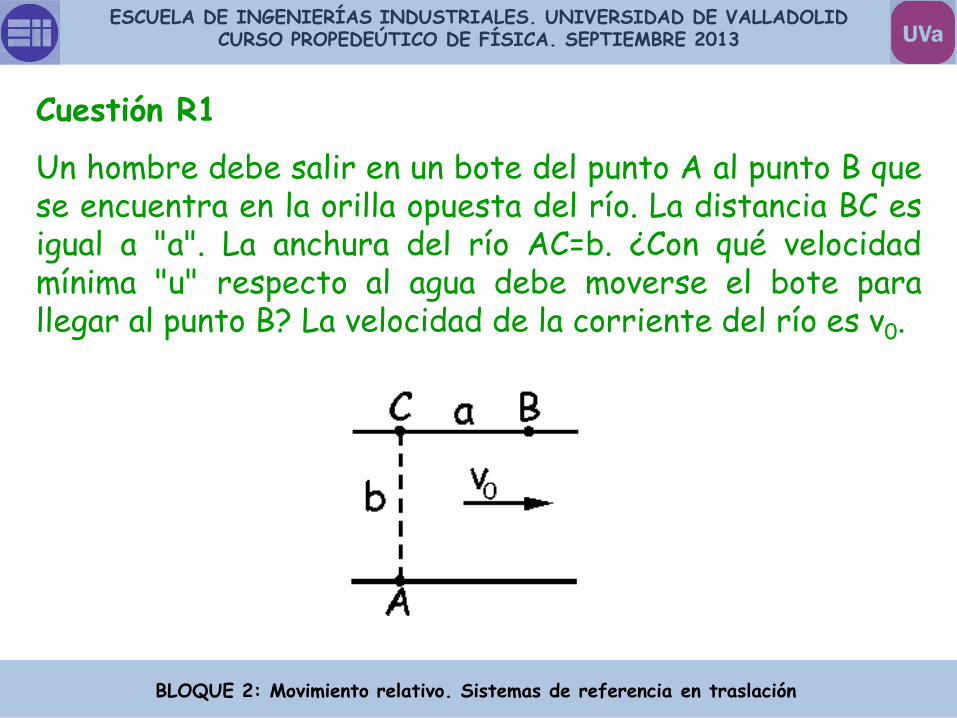
Cuestión R1
Un hombre debe salir en un bote del punto A al punto B que se encuentra en la orilla opuesta del río. La distancia BC es igual a "a". La anchura del río AC=b. ¿Con qué velocidad mínima "u" respecto al agua debe moverse el bote para llegar al punto B? La velocidad de la corriente del río es v0.
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
Cuestión R2
Un ferrocarril se mueve con velocidad constante de 25 km/h hacia el este. Uno de sus pasajeros, que originalmente está sentado en una ventanilla que mira al norte, se levanta y camina hacia la ventanilla del lado opuesto con una velocidad relativa al ferrocarril de 8 km/h. ¿Cuál es la velocidad absoluta del pasajero?
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
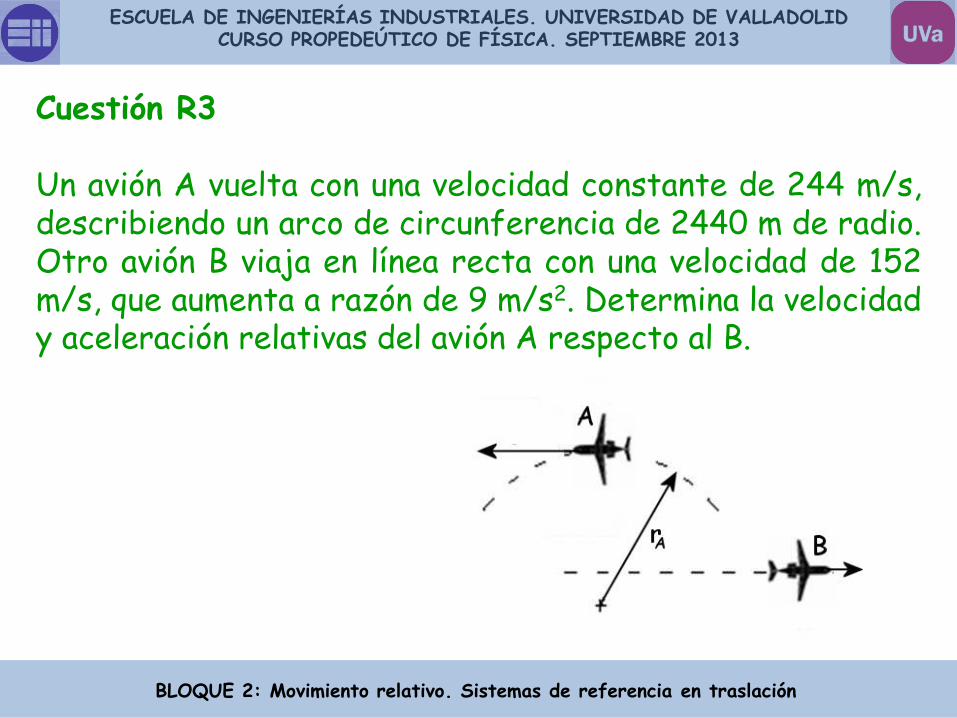
Cuestión R3 Un avión A vuelta con una velocidad constante de 244 m/s, describiendo un arco de circunferencia de 2440 m de radio. Otro avión B viaja en línea recta con una velocidad de 152 m/s, que aumenta a razón de 9 m/s2. Determina la velocidad y aceleración relativas del avión A respecto al B.
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
Cuestión P1 Un remero observa en la otra orilla del río, justo frente a su muelle, una torre; cruza el río perpendicularmente a la orilla con una velocidad respecto del río de 3 km/h y alcanza la otra orilla a 600 m de la torre. Calcular la velocidad de la corriente si el ancho del río es de 200 m.
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en traslación
Cuestión P2 Entre los muelles A y B que están en la misma orilla de un canal rectilíneo hay una distancia de 400 m. Un bote de remos tarda 40 s en ir de A hasta B, y 50 s en regresar. Considerando constantes los módulos de las velocidades del bote respecto del agua y de la corriente respecto de la orilla, hallar los valores de los mismos.
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
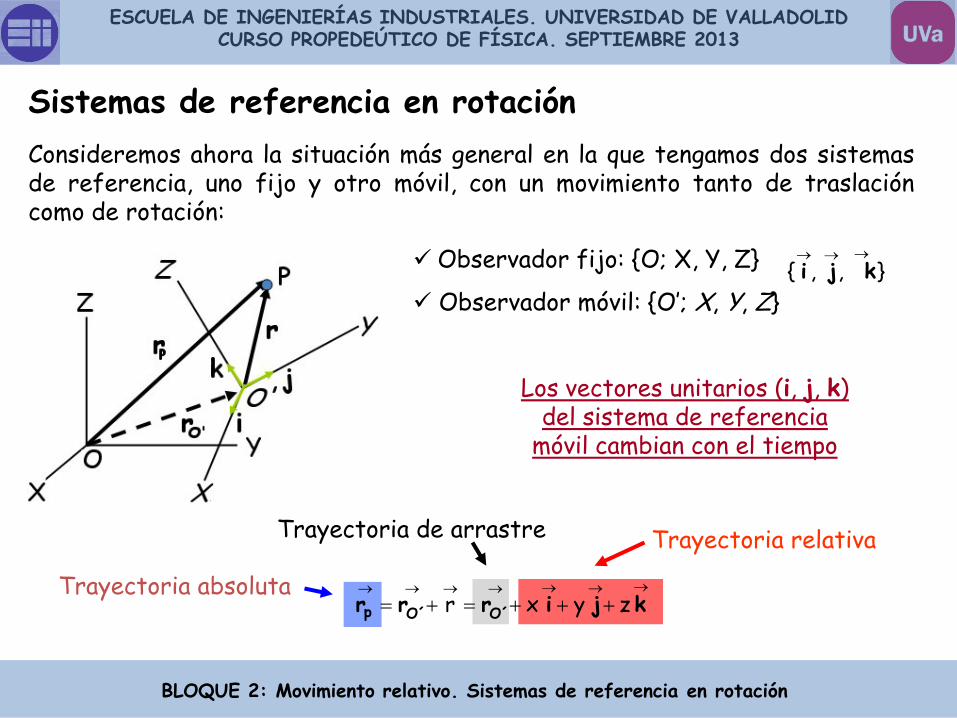
Los vectores unitarios (i, j, k) del sistema de referencia
móvil cambian con el tiempo
Consideremos ahora la situación más general en la que tengamos dos sistemas de referencia, uno fijo y otro móvil, con un movimiento tanto de traslación como de rotación:
Observador fijo: O; X, Y, Z
Observador móvil: O’; X, Y, Z
Sistemas de referencia en rotación
Trayectoria absoluta
Trayectoria de arrastre Trayectoria relativa
→→→→→→→+++=+= kjirrr O´O´p zyxr
,,→→→k j i
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
dtkdzk
dtdz
dtjdyj
dtdy
dtidxi
dtdx
dtrd
+++++=
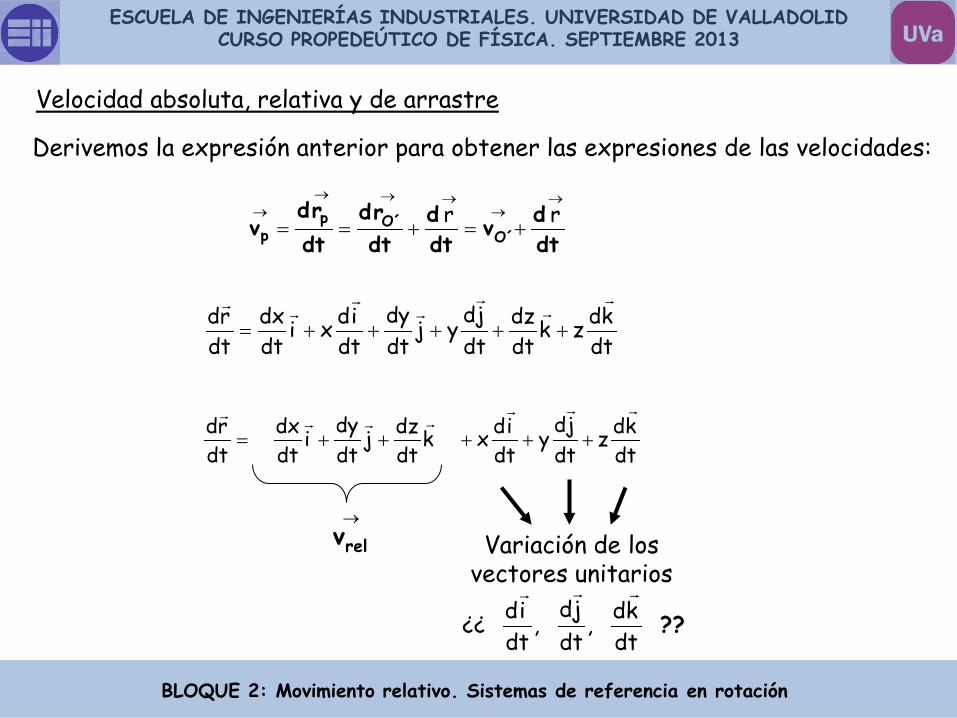
Derivemos la expresión anterior para obtener las expresiones de las velocidades:
dtkdz
dtjdy
dtidxk
dtdzj
dtdyi
dtdx
dtrd
+++++=
→
relv
Velocidad absoluta, relativa y de arrastre
dtdv
dtd
dtrd
dtrd
v O´O´p
p
→→
→→→→
+=+==rr
Variación de los vectores unitarios
?? dtkd,
dtjd,
dtid¿¿
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
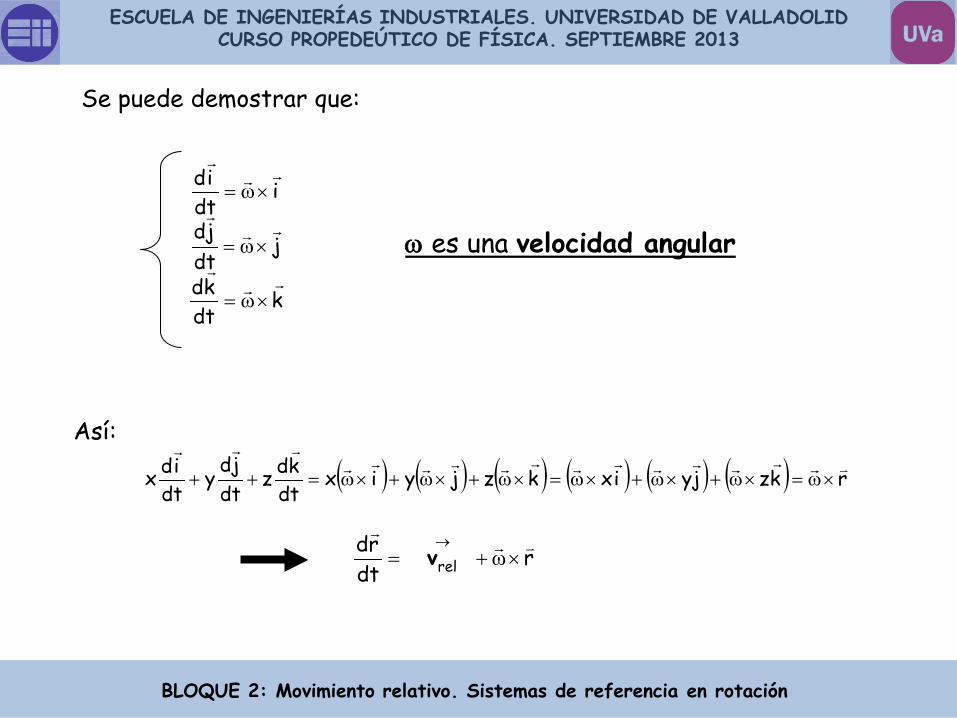
Se puede demostrar que:
kdtkd
jdtjd
idt
id
×ω=
×ω=
×ω=
ω es una velocidad angular
( ) ( ) ( ) ( ) ( ) ( ) rkzjyixkzjyixdtkdz
dtjdy
dtidx
×ω=×ω+×ω+×ω=×ω+×ω+×ω=++
Así:
rdtrd
rel
×ω+=→
v
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
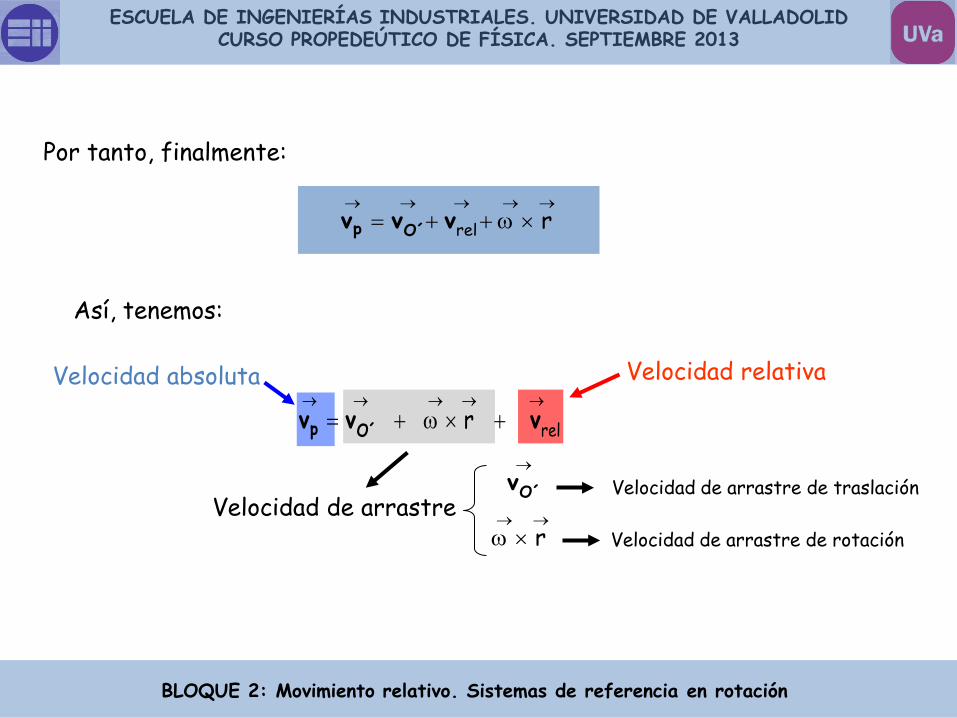
Por tanto, finalmente:
Así, tenemos:
Velocidad absoluta
Velocidad de arrastre
Velocidad relativa
Velocidad de arrastre de traslación
Velocidad de arrastre de rotación
→→→→→×ω++= rrel vvv O´p
→→→→→+×ω+= relr v vv O´p
→
O´v
→→
×ω r
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
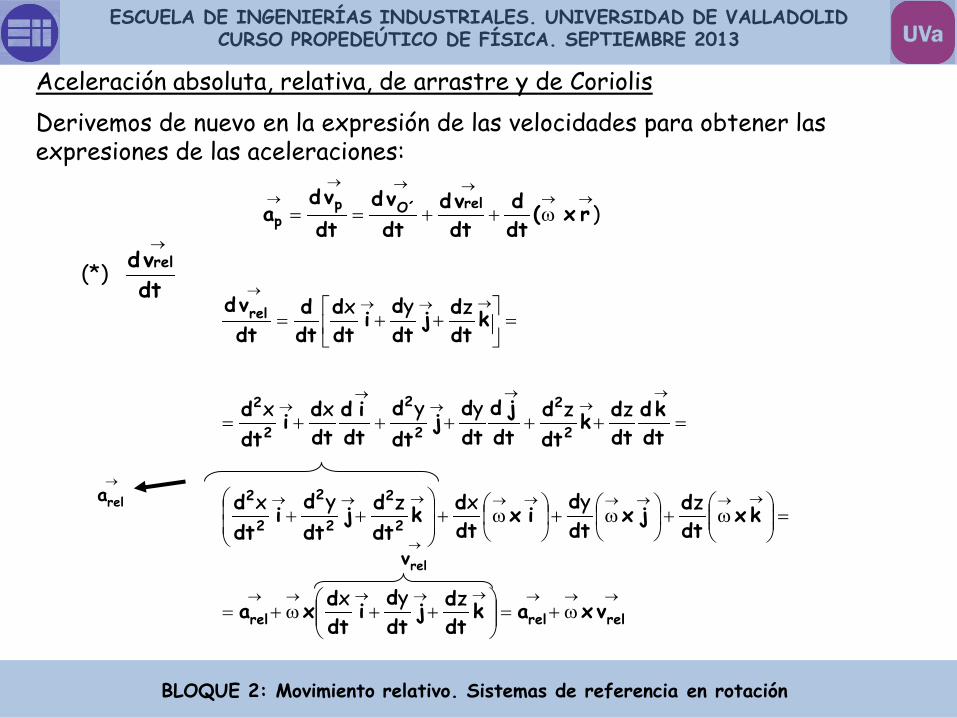
Derivemos de nuevo en la expresión de las velocidades para obtener las expresiones de las aceleraciones:
→
rela
Aceleración absoluta, relativa, de arrastre y de Coriolis
)→→
→→→→
ω++== r x(dtd
dtvd
dtvd
dtvd
a relO´pp
dtvd rel→
(*)
→→→→→→→→
→→→→→→→→→
→→
→→
→→
→→→→
ω+=
++ω+=
=
ω+
ω+
ω+
++
=+++++=
=
++=
relrelrel
2
2
2
2
2
2
2
2
2
2
2
2
rel
vxakdtdj
dtdi
dtdxa
kxdtdjx
dtdix
dtdk
dtdj
dtdi
dtd
dtkd
dtdk
dtd
dtjd
dtdj
dtd
dtid
dtdi
dtd
kdtdj
dtdi
dtd
dtd
dtvd
zyx
zyxzyx
zzyyxx
zyx
→
relv
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
ω
→→rx
dtd (*)
→→→→→→•→
→→→→→→
→→→
→→→
ωω+ω+ω
=
ω+ω+
ω
=ω+ω
=
ω
rxxvxrx
rxvxrxdtd
dtrdxrx
dtdrx
dtd
rel
rel
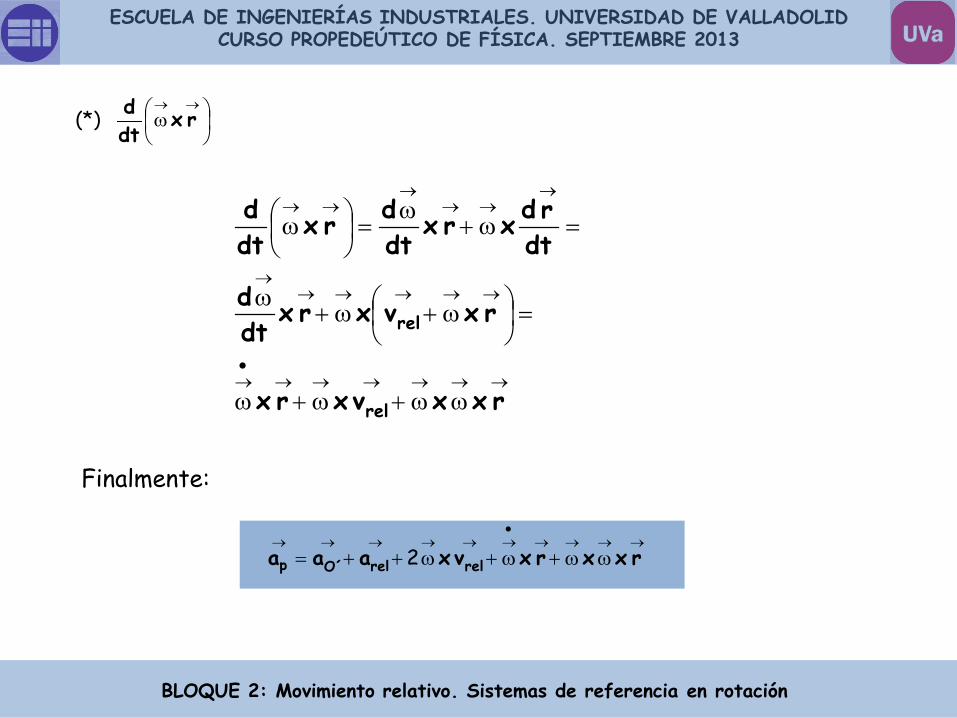
Finalmente:
→→→→•→→→→→→
ωω+ω+ω++= rxxrxvxaaa relrelO´p 2
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
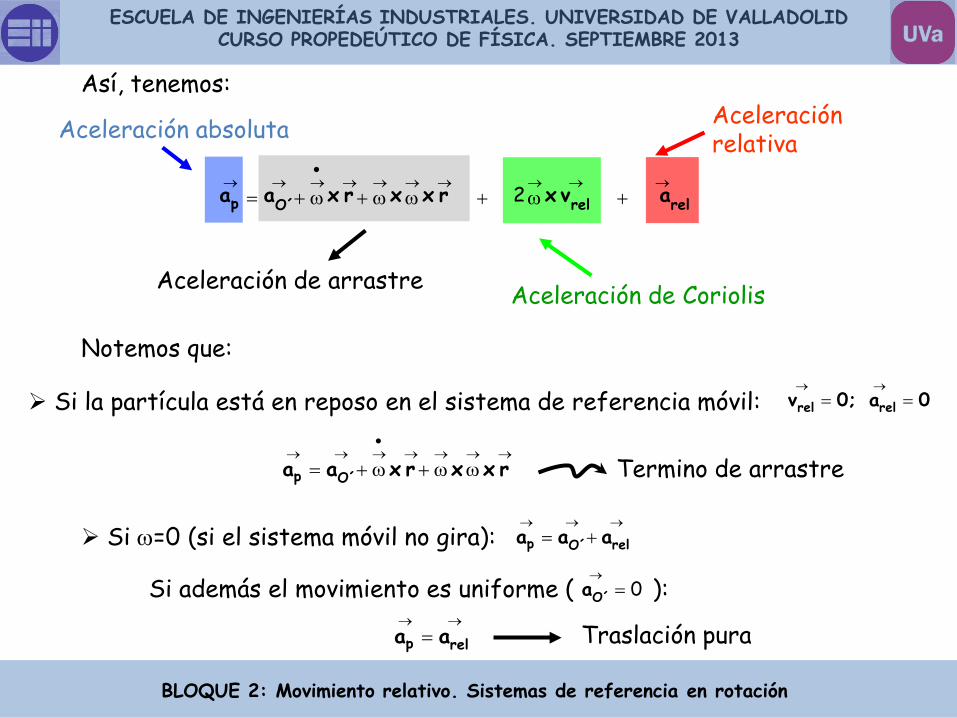
Así, tenemos:
Aceleración absoluta
Aceleración de arrastre
Aceleración relativa
rxxrxaa O´p→→→→
•→→→
ωω+ω+=
0a 0;v relrel ==→→
Aceleración de Coriolis
Notemos que:
Si la partícula está en reposo en el sistema de referencia móvil:
Si ω=0 (si el sistema móvil no gira):
Termino de arrastre
aaa relO´p→→→
+=
aa relp→→
=
Si además el movimiento es uniforme ( ): 0=→
O´a
Traslación pura
a v x r x x r x a a rel rel O´ p → → → → → → →
• → → →
+ ω + ω ω + ω + = 2
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
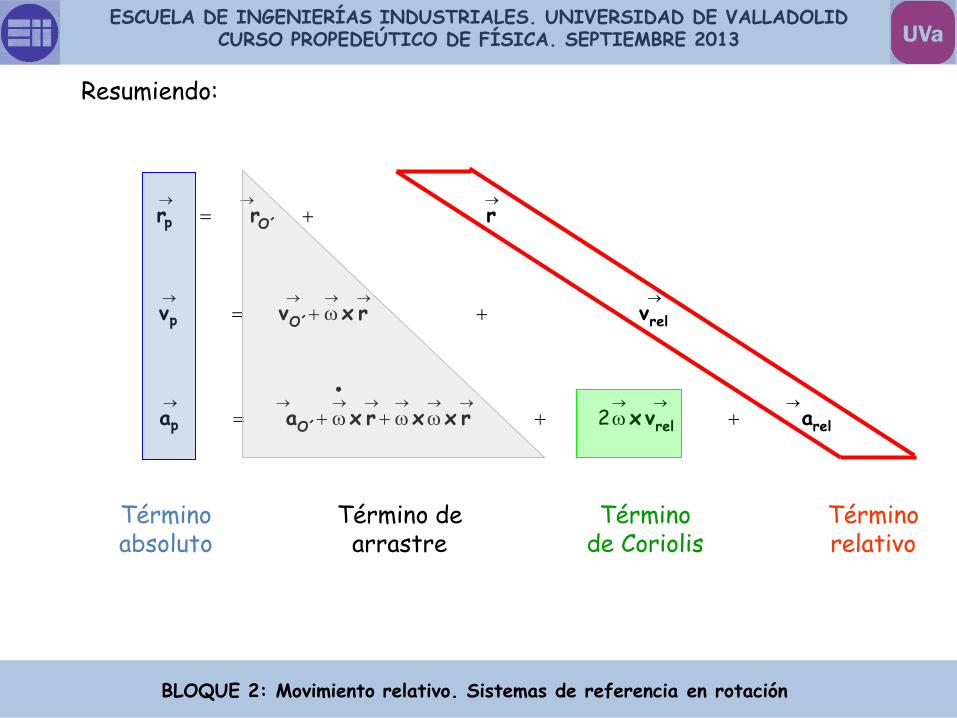
Término absoluto
v rxv v relO´p→→→→→
+ω+=
a vx rxxrxa a relrelO´p→→→→→→→
•→→→
+ω+ωω+ω+= 2
r r r O´p→→→
+=
Término de arrastre
Término relativo
Término de Coriolis
Resumiendo:
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
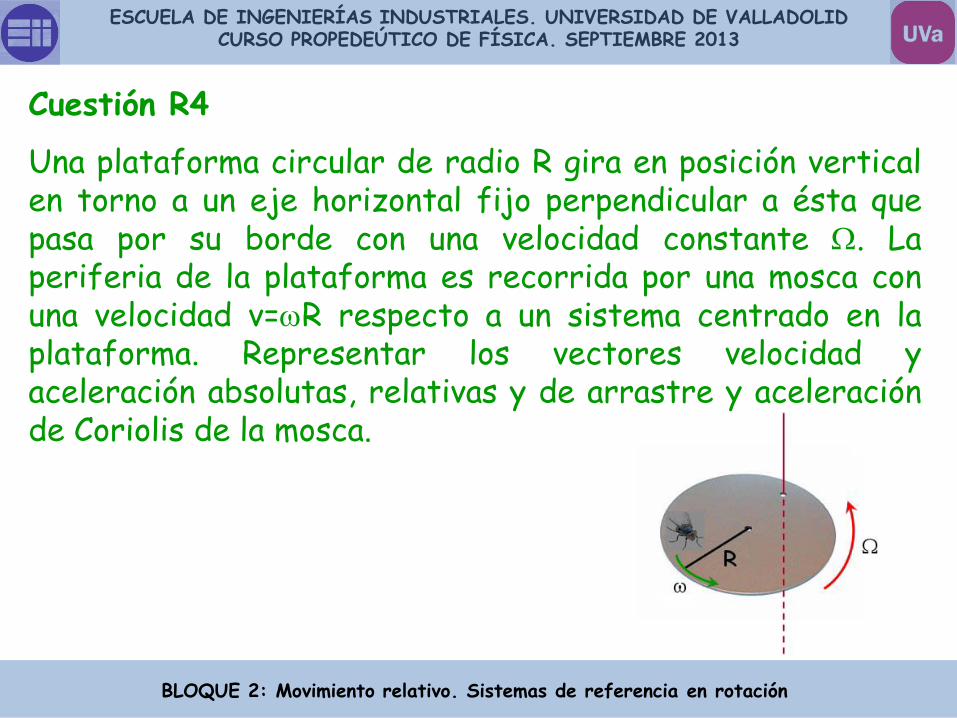
Cuestión R4
Una plataforma circular de radio R gira en posición vertical en torno a un eje horizontal fijo perpendicular a ésta que pasa por su borde con una velocidad constante Ω. La periferia de la plataforma es recorrida por una mosca con una velocidad v=ωR respecto a un sistema centrado en la plataforma. Representar los vectores velocidad y aceleración absolutas, relativas y de arrastre y aceleración de Coriolis de la mosca.
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
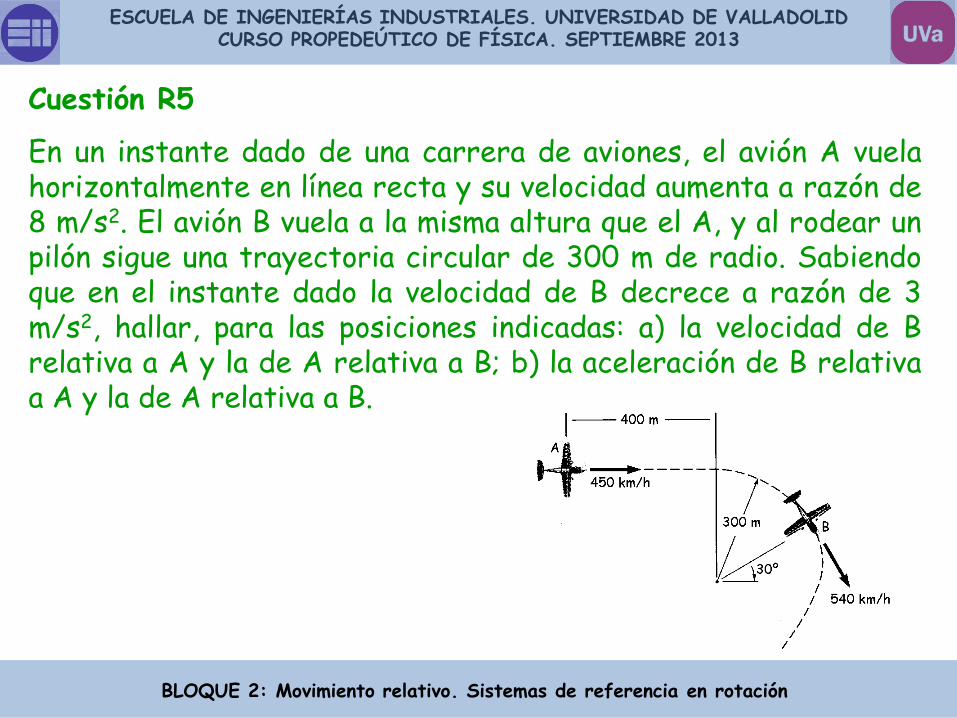
Cuestión R5
En un instante dado de una carrera de aviones, el avión A vuela horizontalmente en línea recta y su velocidad aumenta a razón de 8 m/s2. El avión B vuela a la misma altura que el A, y al rodear un pilón sigue una trayectoria circular de 300 m de radio. Sabiendo que en el instante dado la velocidad de B decrece a razón de 3 m/s2, hallar, para las posiciones indicadas: a) la velocidad de B relativa a A y la de A relativa a B; b) la aceleración de B relativa a A y la de A relativa a B.
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
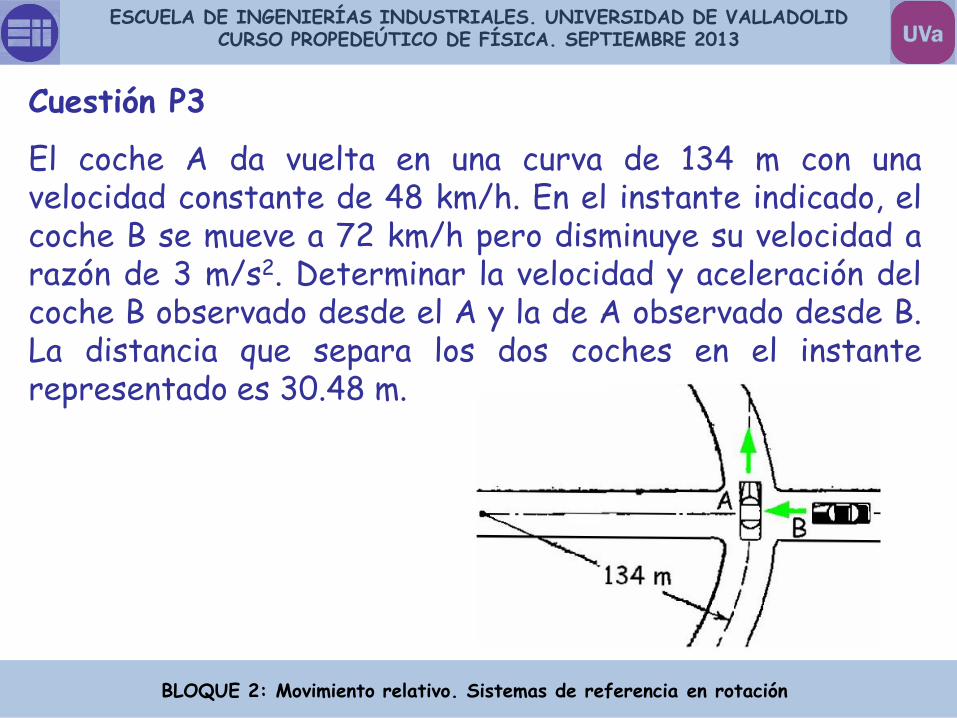
Cuestión P3
El coche A da vuelta en una curva de 134 m con una velocidad constante de 48 km/h. En el instante indicado, el coche B se mueve a 72 km/h pero disminuye su velocidad a razón de 3 m/s2. Determinar la velocidad y aceleración del coche B observado desde el A y la de A observado desde B. La distancia que separa los dos coches en el instante representado es 30.48 m.
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
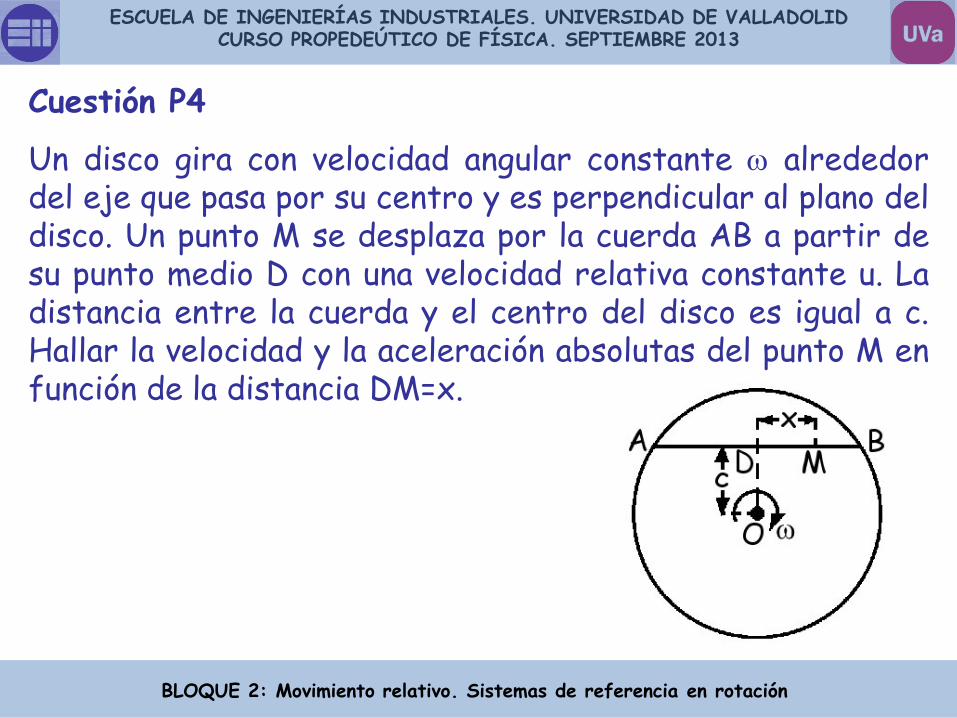
Cuestión P4
Un disco gira con velocidad angular constante ω alrededor del eje que pasa por su centro y es perpendicular al plano del disco. Un punto M se desplaza por la cuerda AB a partir de su punto medio D con una velocidad relativa constante u. La distancia entre la cuerda y el centro del disco es igual a c. Hallar la velocidad y la aceleración absolutas del punto M en función de la distancia DM=x.
BLOQUE 2: Movimiento relativo. Sistemas de referencia en rotación
ESCUELA DE INGENIERÍAS INDUSTRIALES. UNIVERSIDAD DE VALLADOLID CURSO PROPEDEÚTICO DE FÍSICA. SEPTIEMBRE 2013
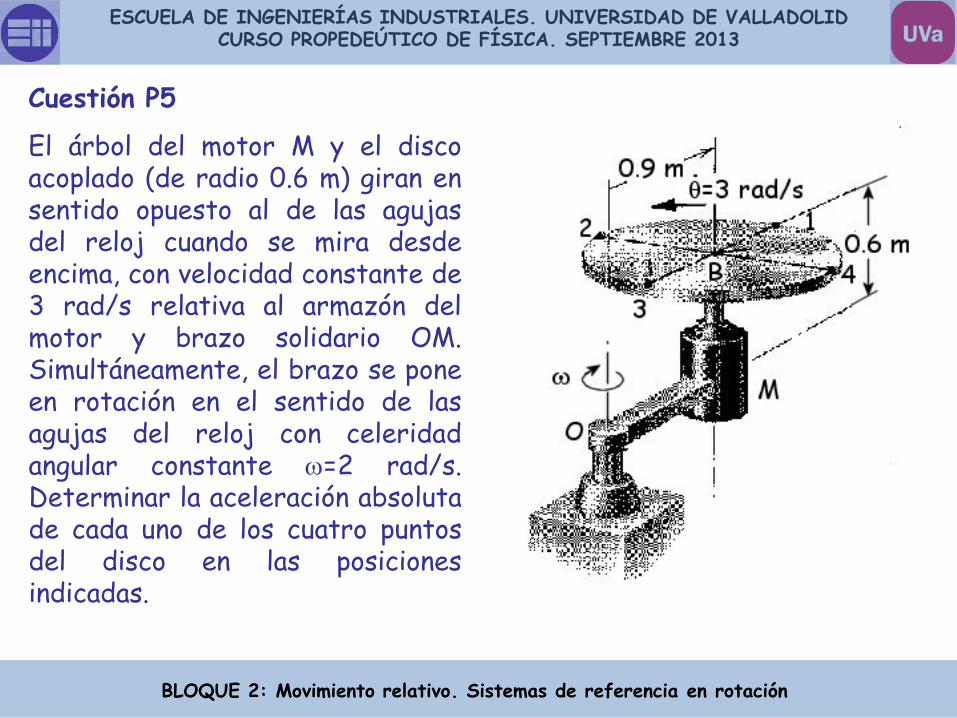
Cuestión P5
El árbol del motor M y el disco acoplado (de radio 0.6 m) giran en sentido opuesto al de las agujas del reloj cuando se mira desde encima, con velocidad constante de 3 rad/s relativa al armazón del motor y brazo solidario OM. Simultáneamente, el brazo se pone en rotación en el sentido de las agujas del reloj con celeridad angular constante ω=2 rad/s. Determinar la aceleración absoluta de cada uno de los cuatro puntos del disco en las posiciones indicadas.