Act 6 Trabajo Colaborativo No 1 Fisica Electronica 100414 88 JORGEANDRESBROWN
Upload
karen-jardimCategory
view
148download
4
TRABAJO COLABORATIVO 1
ROBOTICA
Grupo: 299011_10MARISOL CARO PLAZAS
Código: 1049621920KAREN ANDREA JARDIM CASTRO
Código: 1036936410RAUL ANTONIO VANEGAS CALDERON
Código: 1049632575JONATHAN FERNANDO REYES ARTUNDUAGA
Código: 10244161092
Tutora:SANDRA ISABEL VARGAS
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIAESCUELA DE CIENCIAS BASICAS TECNOLOGIA E INGENIERIA
INGENIERIA DE SISTEMASTUNJA
Abril, 2013

INTRODUCCION
En este trabajo en la fase 1 se realizó un mapa conceptual con unos puntos clave de la estructura de un robot que solicitaba en la guía, estos puntos se les dio jerarquía con el fin de que el mapa tuviera una estructura, este mapa se realizó con una herramienta llamada cmaptools la cual es muy amigable para este tipo de mapas.
La fase 2 se solicita subir aportes al foro colaborativo.
La fase 3 solicita se investigue sobre una serie de preguntas en total 9 todas relacionadas con la estructura y funcionamiento de los robots.
En la fase 4 se debe leer el capítulo 6 del libro Build your own combat robot donde se contestan una serie de preguntas y se realizan las ecuaciones solicitas para dar respuesta a las preguntas planteadas sobre velocidad de rotacional, torque y esquema de transmisión.
Con este trabajo se pretende conocer los sistemas y subsistemas de los robots industriales.

OBJETIVOS
Integrar el grupo colaborativo de tal manera que se pueda lograr estructurar un trabajo final.
Conocer los sistemas y sub sistemas de los robos industriales. Tener base sobre la estructura del robot. Manejo y estructura del mapa conceptual.

Fase 1. Diseñar un mapa conceptual usando el software Cmap:
El mapa debe involucrar mínimo los siguientes términos (Conceptos o enlaces):
Grados de libertad Tipos de articulaciones Subsistema eléctrico RIA Percepción del entorno Zona de trabajo Calibración Capacidad de carga Repetibilidad. Maestro-esclavo Robot industrial Leyes de Asimov Inteligencia artificial Software Sensores Incremento de empleo Vehículos submarinos Subsistema de planeación


Fase 3. De forma individual se debe proponer una respuesta a los siguientes interrogantes y ejercicios.
Defina cuáles son las tres clases de automatización y mencione dos casos posibles de aplicación de cada una de estas.
Son automatización fija, automatización programable y automatización flexible.
Automatización fija: se utiliza cuando el volumen de producción es muy alto, y por tanto se puede justificar económicamente el alto costo del diseño de equipo especializado para procesar el producto, con un rendimiento alto y tasas de producción elevadas.
Un buen ejemplo de la automatización fija puede encontrarse en la industria del automóvil, en donde líneas de transferencia muy integradas constituidas por varias decenas de estaciones de trabajo se utilizan para operaciones de mecanizado en componentes de motores y transmisiones.
Automatización programable: se emplea cuando el volumen de producción es relativamente bajo y hay una diversidad de producción a obtener. Está adaptación se realiza por medio de un programa (Software).
Ejemplo torno CNC
Automatización flexible: es más adecuada para un rango de producción medio. Estos sistemas flexibles poseen características de la automatización fija y de la automatización programada.
Investigue y documente dos aplicaciones de robots autónomos.
A partir de un diseño y una configuración únicas, el robot IRB 5500 FlexPainter con su instalación en una pared, ofrece la mayor y más flexible área de trabajo delos robots de pintura para las carrocerías de los vehículos.
Con dos robots IRB 5500 FlexPainter, se puede realizar la tarea que hasta ahora se necesitaban cuatro robots de pintura. Los resultados son de un menor coste, tanto en la inversión como en la explotación, instalación más rápida así como una alta fiabilidad y disponibilidad de los equipos.
El robot IRB 5500 FlexPainter esta específicamente diseñado para su utilización combinada con el sistema de cartuchos de pintura de ABB, CBS. Las pérdidas durante los cambios de color son casi nulas. Es la mejor solución para aplicaciones de pintura donde se necesitan muchos cambios de color.
Ventajas
- Retorno rápido de la inversión
- Mejora de la fiabilidad de un sistema totalmente automatizado

- Incremento de la flexibilidad tanto para los nuevos procesos como para los Nuevos modelos de vehículos
- Reducción del tamaño y del impacto ambiental de las cabinas de pintura
- Reducción del espacio necesario para el sistema de pintura robotiza dotando en longitud como en anchura
- Reducción del volumen de aire necesario para la ventilación
- Reducción de las emisiones de las cabinas de pintura
- Reducción de las necesidades de programación, tanto en tiempo como en personal.
Investigue y documente el tema “control en lazo cerrado para robots industriales”.
Sistemas de control realimentados o en lazo cerrado.
Servo control o Control de lazo cerrado.
Consiste en retroalimentación continua respecto a la velocidad, dirección y posición de los movimientos del robot. Los robots controlados por servomecanismos, pueden separarse en dos clases principales: robots punto a punto (PTP) y de trayectoria continua (CP).
Existen muchas actividades que requieren un control preciso de la trayectoria entre 2 puntos: la soldadura continua y la pintura por rocío. En este caso el control PTP puede ser inadecuado y posiblemente resulte necesario emplear un contro lCP.
Sus ventajas son:
a. Alto costo.
b. Se usa donde la ruta de movimiento es crítica.
c. Gran capacidad de retroalimentación.
d. Puede realizar una gran diversidad y complejidad de tareas.
Lazo Cerrado
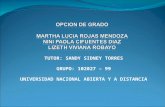
La mayoría de los sistemas de robots industriales poseen un control en lazo cerrado, el cual emplea un transductor o sensor para determinar la posición real de la articulación o del elemento terminal, cuya información se compara con el valor deseado, haciendo que el efector final actúe en base a dicho parámetro. El error entre estas dos magnitudes, se trata de diversas formas para obtener una señal final, que, aplicada a los elementos motrices, hace que se varíe la posición real hasta hacerla coincidir con la deseada.
En la imagen se muestra un diagrama bloques de un controlador en lazo cerrado, en el que la señal que actúa sobre el motor es proporcional a la señal de

error (posición deseada menos posición real), de forma que la relación entre la salida del controlador y la señal de error es constante
Desde el punto de vista de software, entre un robot de soldadura por puntos y uno de soldadura por arco continua ¿Cuál de los dos anteriores, considera es el más sencillo de modelar (matemáticamente) y por qué?
Los encargados de la soldadura por puntos de resistencia en la fabricación son los robots, están programados mediante software con los parámetros para la soldadura como la intensidad de corriente, el tiempo de soldadura, y la presión de apriete dependiendo del grosor de las chapas y de los materiales a unir como describíamos antes. Para realizar la soldadura por puntos se aplica sobre las chapas a unir una corriente eléctrica. Esta corriente se transmite a través de unos electrodos con una determinada presión lo que eleva la temperatura de los materiales en ese punto a un estado pastoso en el cual se unen debido a lapresión ejercida en el procedimiento (forja).
La soldadura por arco es un proceso de soldadura continua en oposición a la soldadura por punto que podría llamarse un proceso discontinuo. La soldadura de arco continua se utiliza para obtener uniones largas o grandes uniones soldadas en las cuales, a menudo, se necesita una cierre hermético entre las dos piezas de metal que se van a unir. El proceso utiliza un electrodo en forma de barra o alambre de metal para suministrar la alta corriente eléctrica de 100 a 300amperesSe puede concluir que es mejor utilizar el robot de soldadura por puntos ya que este necesita menos para metros de programación
¿Cuántos grados de libertad necesita un robot manipulador para que pueda alcanzar y orientar su “pinza” en un ambiente 3d? Explique.
Es un mecanismo con seis grados de libertad, para colocar un objeto en cualquier punto del espacio a su alcance y con cualquier orientación. Los robots industriales, tienen tres grados de libertad que se emplean para definir la posición en el espacio y los otros tres para orientar la mano de sujeción o herramienta.
Defina si la siguiente afirmación es falsa o verdadera y explique. Después de programar la primera vez a un robot manipulador para que llegue exactamente acierto punto, esta labor no se requiere repetir puesto que se considera que el robot realizará la tarea siempre con la misma exactitud y precisión.

Se podría decir que la afirmación es verdadera ya que si el robot fue programado para cumplir con una función en especial, este debe seguir ejecutando el programa original. Solo podría presentarse una falla ante una perturbación externa del sistema, siendo este el caso donde debería modificarse el programa original.
Defina si la siguiente afirmación es falsa o verdadera y explique.Para un robot usado en manipulación de elementos de un laboratorio es más importante la exactitud que la repetibilidad.
Exactitud y Repetibilidad:
1. La resolución: el uso de sistemas digitales, y otros factores que sólo son un número limitado de posiciones que están disponibles. Así el usuario ajusta a menudo las coordenadas a la posición discreta más cercana.
2. La cinemática el error modelado: el modelo de la cinemática del robot no empareja al robot exactamente. Como resultado los cálculos de ángulos de la juntura requeridos contienen un error pequeño.
3. Los errores de la calibración: la posición determinada durante la calibración puede estar apagada ligeramente, mientras se está produciendo un error en la posición calculada.
4. Los errores del azar: los problemas se levantan conforme el robot opera. Por ejemplo, fricción, torcimiento estructural, la expansión termal, la repercusión negativa / la falla en las transmisiones, etc. pueden causar las variaciones en la posición.
La Exactitud de punto:
1. Cómo el robot consigue al punto deseado. 2. Esto mide la distancia entre la posición especificada, y la posición real del efector de extremo de robot. 3. La Exactitud de punto es más importante al realizar fuera de la línea programando, porque se usan las coordenadas absolutas.
Repetibilidad:
1. Cómo el movimiento del robot es a la misma posición como el mismo movimiento hecho antes.
2. Una medida del error o variabilidad al alcanzar repetidamente para unasola posición.
3. Éste sólo es el resultado de errores del azar
4. La repetibilidad de punto es a menudo más pequeña que la exactitud.
La Resolución de punto está basada en un número limitado de puntos que el robot puede alcanzar para éstos se muestran aquí como los puntos negros. Estos puntos están típicamente separados por un milímetro o menos, dependiendo del tipo de robot. Esto es más complicado por el hecho que el

usuario podría pedir una posición como 456.4mm, y el sistema sólo puede mover al milímetro más cercano, 456mm, éste es el error de exactitud de 0.4mm.
Exactitud de un manipulador de robot
En una situación ideal el manipulador podría para en un punto específico, la exactitud podría ser la mitad del control de resolución este podría ser la división de trabajo más pequeña que podría ser dividida (resolución de los componentes digitales). La Cinemática de punto y errores de la calibración son básicamente el cambio en los puntos en el espacio de trabajo que produce un error `E’. Típicamente las característica técnicas del vendedor asumen esa calibración y los errores modelados son cero.
Error en la ubicación de un manipulador
Los puntos al azar son errores que impedirán al robot volver a la misma situación exacta cada tiempo, y esto puede mostrarse con una distribución de probabilidad sobre cada punto.
Precisión en la repetibilidad: esta magnitud establece el grado de exactitud en la repetición de los movimientos de un manipulador al realizar una tarea programada. Dependiendo del trabajo que se deba realizar, la precisión en la repetibilidad de los movimientos es mayor o menor. Así por ejemplo, en labores de ensamblaje de piezas, dicha característica ha de ser menor a +-0.1mm. En soldadura, pintura y manipulación de piezas, la precisión en la repetibilidad está comprendida entre 1 y 3mm y en las operaciones de mecanizado, la precisión hade ser menor de 1mm.
La Resolución del mando: la resolución espacial es el incremento más pequeño de movimiento en que el robot puede dividir su volumen de trabajo. La resolución espacial depende de dos factores: los sistemas que controlan la resolución y los robots las inexactitudes mecánicas. Es más fácil de conceptuar estos factores por lo que se refiere a un robot con 1 grado de libertad.
Control de la resolución: es determinado por el sistema de mando deposición del robot y su sistema de medida de regeneración. Es la habilidad de los controladores de dividir el rango total de movimiento para la juntura particular en incrementos individuales que pueden dirigirse en el controlador. Los incrementos a veces son llamados el direccionamiento parte. La habilidad de dividir el rango de la juntura en los incrementos depende de la capacidad de almacenamiento en la memoria de mando. El número de incrementos separados, identificables (el direccionamiento apunta) para un eje particular es: Numero de incrementos = 2(exp)n.
Considere la siguiente afirmación y determine su nivel de veracidad. Para un robot de transferencia de material el subsistema de software es menos importante que el subsistema de sensores.

No, para un robot de transferencia de materiales el subsistema de software es muy importante puesto que el trabajo de él depende de los datos cargados en su unidad de procesamiento, ya que es un robot que desempeña tareas de las más sencillas de realizar por lo que el robot no dispone de gran cantidad de sensores que lo comunique con el medio en el cual se desempeña y no es un equipo muy sofisticado.
En un robot industrial, ¿Por qué son necesarios tanto sensores internos como externos? Explique.
Los robots se constituyen como los sentidos para los seres humanos, si bien la amplitud de sensores que hasta el momento se han desarrollado permiten que las capacidades de los robots sean mucho mayores a las de cualquier persona, además cuentan con la apreciación perfecta de las maquinas, por lo que las capacidades son mucho mayores y más exactas.
Los sensores pueden llegar a determinar muchísimos elementos para los robots ya que por ejemplo hay algunos que pueden llegar a determinar tanto factores de orientación como elementos térmicos, así como también hay algunos que pueden llegar a determinar factores mucho más complejos como sonidos, rastros o partículas en el aire que pueden llegar a ser evaluadas en ese mismo instante por los robots.
Los sensores determinan las capacidades de los robots, hemos visto desde que comenzamos a escribir que han ido desarrollando hasta lo que sería lo proporcional al tacto humano, dando a los brazos robóticos la posibilidad de detectar el material que están manipulando, para que no vaya a ejercer una presión desmedida y termine rompiendo la pieza que tiene en su poder .En lo que tiene que ver con la seguridad, los sensores pueden llegar a ser las herramientas que terminen dando un informe completamente detallado para todos los dispositivos, en muchos casos la presencia de estas herramientas pueden determinar un informe preciso de inteligencia, algo que para los ejércitos es de vital importancia, tanto en las instancias previas a una misión como en el desarrollo de la misma. Todo esto para determinar que los sensores externos y los sensores internos son muy importantes para el robot, los externos controlan el entorno y los internos auto controlan todas las operaciones internas del robot.
Existen dos tipos de sensores: externos e internos.
Sensores externos TÁCTILES o De contacto o Analógicos e individuales o Matriciales o Ópticos o Resistivos
DE PROXIMIDAD VISUALES
o Exploración visual o Cámaras de TV. Sensores internos
Los sensores internos aportan información sobre el propio robot acerca de su movimiento, posición, velocidad aceleración y fuerza.
• MOVIMENTO Y POSICIÓN o Movimiento rectilíneo

Potenciómetros, Transformadores variables o Rotación, Digitales, Incrementales, Absolutos, Analógicos, Sincros, Resolvers
VELOCIDAD, o Analógicos, o Digitales ACELERACIÓNFUERZA
Fase 4. (individual) Ingrese a la biblioteca virtual de la universidad:
1. Ingrese a las base de datos de la biblioteca, este es el enlace directo:
http://bibliotecavirtual.unad.edu.co:2048/menu
2. Ingrese a E-brary y busque el libro: Build your own combat robot. Esto lo puede hacer con la herramienta de búsqueda interna de E-brary.
3. Lea cuidadosamente la primera parte del capítulo 6 de dicho libro (Power Transmision Basics).
4. Basándose en esta sección del libro responda los siguientes interrogantes:
a) ¿Cuáles son las secciones de Power Transmission Basics?
Fundamentos de transmisión Reducción simple Reducción doble Torque Fuerza Localización de los componentes de locomoción Montaje de los motores Consideraciones térmicas de los motores Métodos de transmisión de potencia Sistemas de transmisión por cadenas Sistemas de transmisión por correas Correas en v y correas dentadas Correas planas Cajas de cambios Montaje de los engranajes Reductores de velocidad
b) ¿Cuál es el objetivo principal de una transmisión?
El propósito de la transmisión de energía es reducir la velocidad del motor acierta velocidad utilizable para el robot y para transmitir la potencia a las ruedas. La velocidad de un robot es una función de la velocidad de rotación de las ruedas y el diámetro de las ruedas.

c) Usando la ecuación 6.2, si cierto robot tiene ruedas de 10 pulgadas de diámetro y requiere moverse a una velocidad de 10 Km/H ¿Cuál debe ser la velocidad rotacional de las rudas del robot.
Donde V =es la velocidad del robotDonde D= es el diámetro de las ruedas motricesDonde N= es la velocidad de rotación de la rueda.
Datos:
V= 15km/h
1 km= 100000 cm
1 hora= 60 minutos
15 km/h = 15* 100000= 1500000/60= 25000 cm/minuto
1 pulgada= 2.54 cm
25000 cm = 9842,52 pulgadas
N= vπD
= 9842,52 pulgadas /minuto
5 π= 626,59 RPM
d) En la figura 6.1 esquema de la izquierda, ¿Es cierto que este permite reducir la velocidad? ¿Qué sucede con el torque? Justifique.
La velocidad no es posible aumentarla ya que como vemos en la ecuación. Donde
N2= D1D2
N1, Siempre nos resultará N2 menor, ya que el Diámetro de la
rueda 2 es mayor a la rueda 1, y por lo tanto el engranaje de salida girara más lento, y la dirección de los engranajes es opuesta. Con relación al torque, este se
incrementa ya que la velocidad disminuye, y como vemos en la ecuación, T2= D2D1
T1, como D2 es mayor a D1 por lo tanto T2se incrementa.
e) Si el motor de cierto robot entrega 3600 rpm, y usted desea que las ruedas de su robot giren a 36 rpm ¿Cuál esquema de transmisión usaría? Justifique.
Usaría el Sistema de Reducción de doble velocidad, Esquema 6.2 b), ya que este me permite obtener engranajes de diámetros menores, a los que me produciría utilizar el esquema 6.1 que debido a la relación de velocidad, obtendría diámetros muy grandes y resultando un diseño demasiado complejo
N2= D1D2
N1 → D2= D1 N1N 2
→ D2 = D1 3600N 218
Por lo tanto, D2 = 200D1
Es decir que necesitaríamos un engranaje D2, 200 veces mayor a D1

CONCLUSIONES
En este trabajo se logró por primera vez integrar el grupo colaborativo con el fin de realizar y estructurarlo en un trabajo final completo.
Se conoció el sistema y subsistema y la estructura del robot en un mapa conceptual realizado den CMPTOOLS, se pudo entender la importancia y funcionalidad de los robot industriales así como sus ventajas, desventajas y limitaciones.
Se pudo entender la importancia de los sensores internos y externos así como la transmisión de información, funcionamiento de poleas entre otros.

BIBLIOGRAFIA
MÓDULO DE ROBÓTICA, Freddy F. Valderrama Gutiérrez Primera Versión Creada por Ingeniero Luis Enrique Camargo. Escuela de Ciencias asicas Tecnología e Ingeniería .UNAD. Julio, 2008.
www.Roboticaindustrial.com
http://www.tendencias21.net/Crean-robots-autonomos-que-trabajan-en-equipo-para-explorar-otros-planetas_a3770.html
http://www.agenciasinc.es/esl/Noticias/Disenan-robots-autonomos-para-apoyar-a-equipos-de-rescate
http://bibliotecavirtual.unad.edu.co:2048/menu