
3.1 instrumentacion
47
3.1 ACTUADORES ELÉCTRICOS INSTRUMENTACION
-
Upload
beth-roberts -
Category
Documents
-
view
245 -
download
0
description
instrumentacion
Transcript of 3.1 instrumentacion

3.1 ACTUADORES ELÉCTRICOS
INSTRUMENTACION

INTRODUCCION
ACTUADORLa misión general del actuador es el movimiento de los elementos del sistema en concordancia con las órdenes dadas por la unidad de control.Se trata de un dispositivo capaz de generar una fuerza a partir de energía eléctrica, hidráulica, neumática etc. El actuador recibe la orden de un regulador o controlador y da una salida necesaria para activar a un elemento final de control.

Las características a considerar son entre otras:
PotenciaControlabilidadPeso y volumenPrecisiónVelocidadMantenimientoCosto

Clasificación de los actuadores según la energía que utiliza:
Neumático – Utiliza el aire comprimido como fuente de energía y es muy indicado en el control de movimientos rápidos, pero de precisión limitada.Hidráulico – Los actuadores neumáticos son recomendables en los manipuladores que tienen una gran capacidad de carga, junto a una precisa regulación de velocidad.Eléctrico – Es el más utilizado, por su fácil y preciso control, así como por otras propiedades ventajosas que establecen su funcionamiento, como consecuencia del empleo de la energía eléctrica.

Actuadores eléctricos
Las características de control, sencillez y precisión de los accionamientos eléctricos han hecho que sean los mas usados.Dentro de los actuadores eléctricos pueden distinguirse:MotoresActuadores linealesContactores Relevadores

Motores
Motores de corriente continua (DC). Servomotores.Motor paso a paso.Motor de corriente alterna (AC).

Motor de corriente continua
El motor de corriente continua es una máquina que convierte la energía eléctrica en mecánica, principalmente mediante el movimiento rotatorio.La principal característica es la posibilidad de regular la velocidad desde vacío hasta plena carga.

El motor de C.C. esta constituido por dos piezas fundamentales
Rotor: constituye la parte móvil del motor y proporciona el torque para mover la carga.Estator: constituye la parte fija y su función es suministrar el flujo magnético que será usado por el bobinado del rotor para realizar el movimiento giratorio.

Servomotores
Los servos son un tipo especial de motor de c.c.(aunque ya los hay de c.a) que se caracterizan por su capacidad para posicionarse de forma inmediata en cualquier posición dentro de su intervalo de operación. Para ello, el servomotor espera un tren de pulsos que se corresponde con el movimiento a realizar.El resultado es un servo de posición con un margen de operación de 180° aproximadamente.

Partes de un servomotor
Están generalmente formados:AmplificadorUn motorUn sistema reductor : - por ruedas dentadas - un circuito de realimentación (todo en un misma caja de pequeñas dimensiones)

Ejemplos y aplicaciones

Motor paso a paso
Es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (pasos) dependiendo de sus entradas de control.

Características
Ventajas:Es capaz de asegurar un posicionamiento simple y exacto.Ligeros, fiables, y fáciles de controlar, pues al ser cada estado de excitación del estator estable, el control se realiza en bucle abierto, sin la necesidad de sensores de realimentación.Son ideales donde se requiere un movimiento preciso.

Características
Desventajas:El funcionamiento a bajas velocidades no es suave, ya que existe el peligro de perdida de una posición por trabajar en bucle abierto.Tienden a sobrecalentarse trabajando a velocidades elevadas y presentan un limite en el tamaño que pueden alcanzar

Existen tres tipos de motores paso paso
De imanes permanentes.
De reluctancia variable.
Híbrido
De imanes permanentes
El rotor, que posee una polarización magnética constante, gira para orientar sus polos de acuerdo al campo magnético creado por las fases del estator. Permite mantener un par diferente de cero cuando el motor no está energizado. Dependiendo de la construcción del motor, es típicamente posible obtener pasos angulares de 7.5, 11.25, 15, 18, 45 o 90°. El ángulo de rotación se determina por el número de polos en el estator


de reluctancia variable
Tiene un rotor multipolar de hierro y un estator devanado laminado, y rota cuando los dientes del rotor son atraídos a los dientes del estator electromagnéticamente energizados. La inercia del rotor de un motor de paso de reluctancia variable es pequeña y la respuesta es muy rápida, pero la inercia permitida de la carga es pequeña. Cuando los devanados no están energizados, el par estático de este tipo de motor es cero. Generalmente, el paso angular de este motor de paso de reluctancia variable es de 15°

híbridos.
Combinan el modo de funcionamiento de los dos anteriores.
Se caracteriza por tener varios dientes en el estator y en el rotor, el rotor con un imán concéntrico magnetizado axialmente alrededor de su eje. Se puede ver que esta configuración es una mezcla de los tipos de reluctancia variable e imán permanente. Este tipo de motor tiene una alta precisión y alto par y se puede configurar para suministrar un paso angular tan pequeño como 1.8°.

Motor de corriente alterna (AC)
La corriente alterna es aquella en que la que la intensidad cambia de dirección periódicamente en un conductor. como consecuencia del cambio periódico de polaridad de la tensión aplicada en los extremos de dicho conductoLa variación de la tensión con el tiempo puede tener diferentes formas: Senoidal, triangular, trapezoidal…

Ventajas
La corriente alterna presenta ventajas decisivas de cara a la producción y +transporte de la energía eléctrica, respecto a la corriente continua:1-Generadores y motores mas baratos y eficientes, y menos complejos 2-Posibilidad de transformar su tensión de manera simple y barata (transformadores) 3-Posibilidad de transporte de grandes cantidades de energía a largas distancias con un mínimo de sección de conductores ( a alta tensión) 4-Posibilidad de motores muy simples, (como el motor de inducción asíncrono de rotor en cortocircuito) 5-Desaparición o minimización de algunos fenómenos eléctricos indeseables (magnetización en las maquinas, y polarizaciones y corrosiones electrolíticas en pares metálicos)

Existen dos tipos fundamentales de motores de corriente alterna:
Motores asíncronos.
Motores síncronos.

Motores asíncronos
Son probablemente los más sencillos y robustos de los motores eléctricos El rotor está constituido por varias barras conductoras dispuestas paralelamente el eje del motor y por dos anillos conductores en los extremos. El conjunto es similar a una jaula de ardilla

Principio de funcionamiento
El estator consta de un conjunto de bobinas, de modo que cuando la corriente alterna trifásica las atraviesa, se forma un campo magnético rotatorio en las proximidades del estator. Esto induce corriente en el rotor, que crea su propio campo magnético. La interacción entre ambos campos produce un par en el rotor. No existe conexión eléctrica directa entre estator y rotor
La frecuencia de la corriente alterna de la alimentación determina la velocidad a la cual rota el campo magnético del estator. El rotor sigue a este campo, girando más despacio. la diferencia de velocidades se denomina deslizamiento

Motores síncronos
El motor síncrono, como su nombre indica, opera exactamente a la misma velocidad que el campo del estator, sin deslizamiento.El motor síncrono, utiliza el mismo concepto de un campo magnético giratorio producido por el estator, pero ahora el rotor consta de electroimanes o de imanes permanentes (PM) que giran sincrónicamente con el campo del estator


Actuadores lineales

Introducción
Los actuadores lineales electromecánicos, son una combinación de husillos a bolas o trapeciales con motores eléctricos, cuyo efecto es el desplazamiento del vástago de un cilindro, con total control de la velocidad y posicionamiento. En cursos que van desde 100 hasta 1.500 mm. de recorrido, enfabricación standard, pueden fabricarse en diferentes longitudes bajo demanda.Las capacidades de carga dinámica alcanzan los 70.000N, con estas características pueden ser aplicadosen casi cualquier automatización industrial, en la que se desee mover algo sin necesidad de fuerzamanual, neumática o hidráulica.

Ventajas
Fácil montaje en cualquier posición- Funcionamiento independiente y autónomo de otras instalaciones.- El movimiento se efectúa a velocidad uniforme.- Funcionamiento silencioso.- La fuerza de empuje y tracción es constante e igual en ambos sentidos.- Insensible en gran medida a las variaciones de temperatura.- No precisa mantenimiento durante largos períodos.- Facilidad de realizar variaciones de velocidad y posicionamiento.

CONTACTORES
Un contactor es un dispositivo con capacidad de cortar la corriente eléctrica de un receptor o instalación con la posibilidad de ser accionado a distancia, que tiene dos posiciones de funcionamiento: una estable o de reposo, cuando no recibe acción alguna por parte del circuito de mando, y otra inestable, cuando actúa dicha acción. Este tipo de funcionamiento se llama de "todo o nada"

Clasificación
Contactores electromagnéticos. Su accionamiento se realiza a través de un electroimán.
-Contactores electromecánicos. Se accionan con ayuda de medios mecánicos.
-Contactores neumáticos. Se accionan mediante la presión de un gas.
-Contactores hidráulicos. Se accionan por la presión de un líquido.

Constitución de un contactor electromagnético.
- Contactos principales. Son los destinados a abrir y cerrar el circuito de potencia. Están abiertos en reposo.- Contactos auxiliares. Son los encargados de abrir y cerrar el circuito de mando. Están acoplados mecánicamente a los contactos principales y pueden ser abiertos o cerrados.- Bobina. Elemento que produce una fuerza de atracción (FA) al ser atravesado por una corriente eléctrica. Su tensión de alimentación puede ser de 12, 24 y 220V de corriente alterna, siendo la de 220V la más usual.- Armadura. Parte móvil del contactor. Desplaza los contactos principales y auxiliares por la acción (FA) de la bobina.- Núcleo. Parte fija por la que se cierra el flujo magnético producido por la bobina.- Resorte. Es un muelle encargado de devolver los contactos a su posición de reposo una vez cesa la fuerza FA.

Funcionamiento del contactor.
A los contactos principales se conectan al circuito que se quiere gobernar. Asegurando el establecimiento y cortes de las corrientes principales y según el número de vías de paso de corriente, será bifásico o trifásico. Realizándose las maniobras simultáneamente en todas las vías.Los contactos auxiliares son de dos clases abiertos y cerrados. Estos forman parte del circuito auxiliar del contactor y aseguran las auto alimentaciones , los mandos, enclavamientos de contactos y señalizaciones en los equipos de automatismo.Cuando la bobina del contactor queda excitada por la circulación de la corriente, mueve el núcleo en su interior y arrastra los contactor principales y auxiliares, estableciendo a través de los polos el circuito entre la red y el receptor.

Funcionamiento del contactor.Cuando la bobina deja de ser alimentada, abre los contactos por efecto del resorte de presión de los polos y del resorte de retorno de la armadura móvil.La bobina está concebida para resistir los choque mecánicos provocados por el cierre y la apertura de los contactos y los choques electromagnéticos debidos al paso de la corriente por sus espiras, con el fin de reducir los choques mecánicos la bobina o circuito magnético, a veces los dos se montan sobre amortiguadores.Si se debe gobernar desde diferentes puntos, los pulsadores de marcha se conectan en paralelo y el de parada en serie.

Relevadores

Introducción
El relé o relevador es un dispositivo electromecánico. Funciona como un interruptor controlado por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se acciona un juego de uno o varios contactos que permiten abrir o cerrar otros circuitos eléctricos independientes.

Tipos de relés
Existen multitud de tipos distintos de relés, dependiendo del número de contactos, de su intensidad admisible, del tipo de corriente de accionamiento, del tiempo de activación y desactivación, entre otros. Cuando controlan grandes potencias se llaman contactores en lugar de relés.

Relés electromecánicos
Relés de tipo armadura: Un electroimán provoca la basculación de una armadura al ser excitado, cerrando o abriendo los contactos dependiendo de si es NA (normalmente abierto) o NC (normalmente cerrado).
Relés electromecánicos
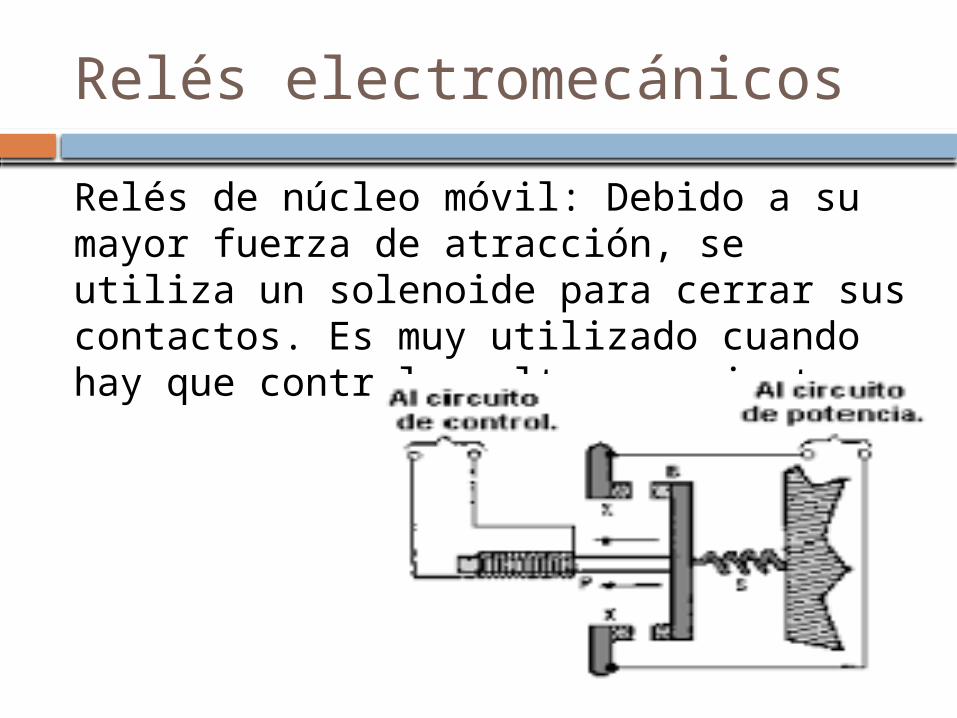
Relés de núcleo móvil: Debido a su mayor fuerza de atracción, se utiliza un solenoide para cerrar sus contactos. Es muy utilizado cuando hay que controlar altas corrientes
Relés electromecánicos
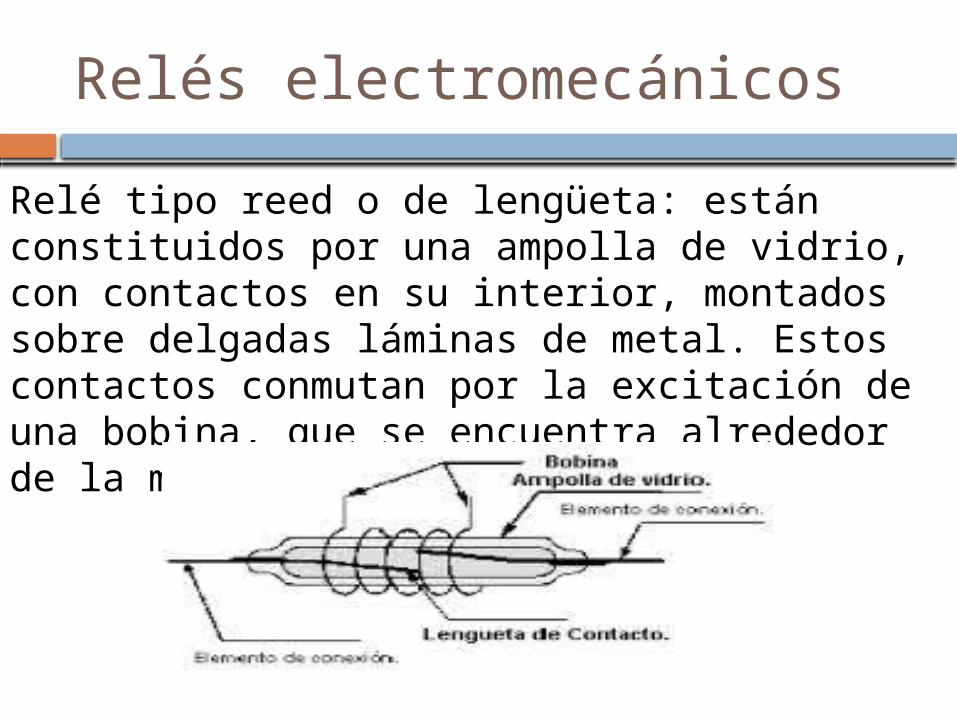
Relé tipo reed o de lengüeta: están constituidos por una ampolla de vidrio, con contactos en su interior, montados sobre delgadas láminas de metal. Estos contactos conmutan por la excitación de una bobina, que se encuentra alrededor de la mencionada ampolla.

Relés electromecánicos
Relés polarizados o biestables: se componen de una pequeña armadura, solidaria a un imán permanente. El extremo inferior gira dentro de los polos de un electroimán, mientras que el otro lleva una cabeza de contacto. Al excitar el electroimán, se mueve la armadura y provoca el cierre de los contactos. Si se polariza al revés, el giro será en sentido contrario, abriendo los contactos ó cerrando otro circuito.

Relés electromecánicos
Relés multitensión: son la ultima generación de relés que permiten: A un relé funcionar en cualquier tensión y frecuencia desde 0 a 300 AC/DC reduciendo a un solo modelo las distintas tensiones y voltajes que se fabricaban hasta ahora.

Relé de estado sólido
Este dispositivo es usado generalmente para aplicaciones donde se presenta un uso continuo de los contactos del relé que en comparación con un relé convencional generaría un serio desgaste mecánico, además de poder conmutar altos amperajes que en el caso del relé electromecánico destruiría en poco tiempo los contactos. Estos relés permiten una velocidad de conmutación muy superior a la de los relés electromecánicos.

Relé de corriente alterna
Cuando se excita la bobina de un relé con corriente alterna, el flujo magnético en el circuito magnético, también es alterno, produciendo una fuerza pulsante, con frecuencia doble, sobre los contactos. Es decir, los contactos de un relé conectado a la red, en algunos lugares, como varios países de Europa y Latinoamérica oscilarán a 2 x 50 Hz y en otros, como en Estados Unidos lo harán a 2 x 60 Hz. Este hecho se aprovecha en algunos timbres y zumbadores, como un activador a distancia. En un relé de corriente alterna se modifica la resonancia de los contactos para que no oscilen.

S
Relé de láminas Relés de acción retardada Relés con retardo a la conexión Relés con retardo a la desconexión: Relés con retención de posición

s


















