






Idiomas
Páginas
Jurídico


DINAMICA ROTACIONAL
INTEGRANTES :
Erick Barrera Hjalmar Charig Wilson López Christian Paullan Henry Sisa Christian Sevilla

TORQUE O MOMENTOEs una medida que cuenta hacia a donde tiende una fuerza cualquiera para alterar la rotacion de un cuerpo, la unidad en la que viene dada el torque es el newton-metro
Existen 4 tipos de torque y son:
Torque positivo.- Cuando gira en sentido antihorario.
Torque negativo.- Cuando gira en sentido horario.
Torque maxico.- Cuando la fuerza y el radio vector son perpendiculares.
Torque nulo.- Cuando la fuerza pasa por el centro y no genera torque.
En todos los casos el torque de una fuerza depende de la magnitud, direccion F y de su punto de aplicacion respecto de un origen 0.
Si la fuerza no es perpendicular al radio, sólo produce torque en la componente perpendicular a éste.
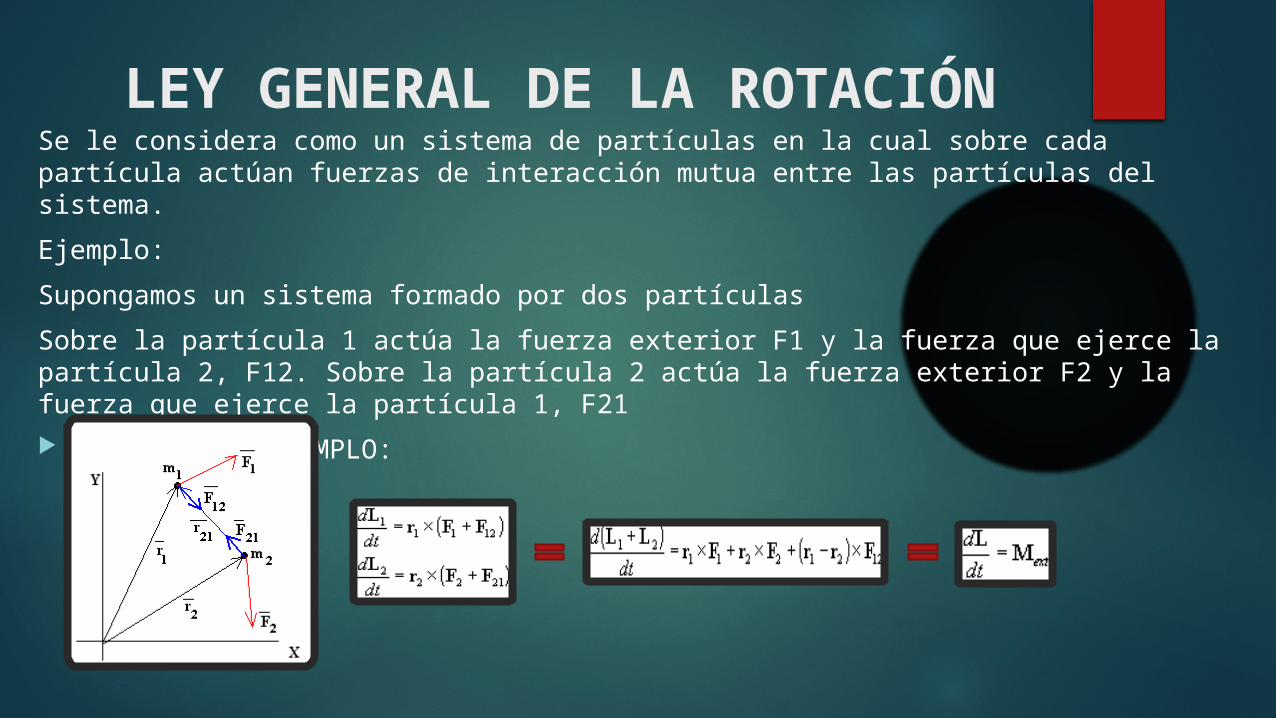
LEY GENERAL DE LA ROTACIÓNSe le considera como un sistema de partículas en la cual sobre cada partícula actúan
fuerzas de interacción mutua entre las partículas del sistema.
Ejemplo:
Supongamos un sistema formado por dos partículas
Sobre la partícula 1 actúa la fuerza exterior F1 y la fuerza que ejerce la partícula 2, F12. Sobre la partícula 2 actúa la fuerza exterior F2 y la fuerza que ejerce la partícula 1, F21
GRAFICO DEL EJEMPLO:

MOMENTO DE INERCIA DE UNA MASA PUNTUAL
La inercia está relacionada como una nueva definición de la masa también conocida con el nombre de masa rotacional la cual se debe especificar en relación al eje de rotación ubicado que da como factor una energía cinética rotacional , momento angula y el principio fundamental de la conservación del momento angular
El momento de inercia en una masa puntual se la puede definir como el producto de la masa por el cuadrado de la distancia perpendicular al eje de rotación I=mr2. Y es la responsable de la distribución de masas que conduce a los momentos de inercia comunes
Una formula análoga de la segunda ley de newton del movimiento
Se la representa F=M.a y su sus sinificados son :
F = fuerza
M = masa
a = aceleración lineal
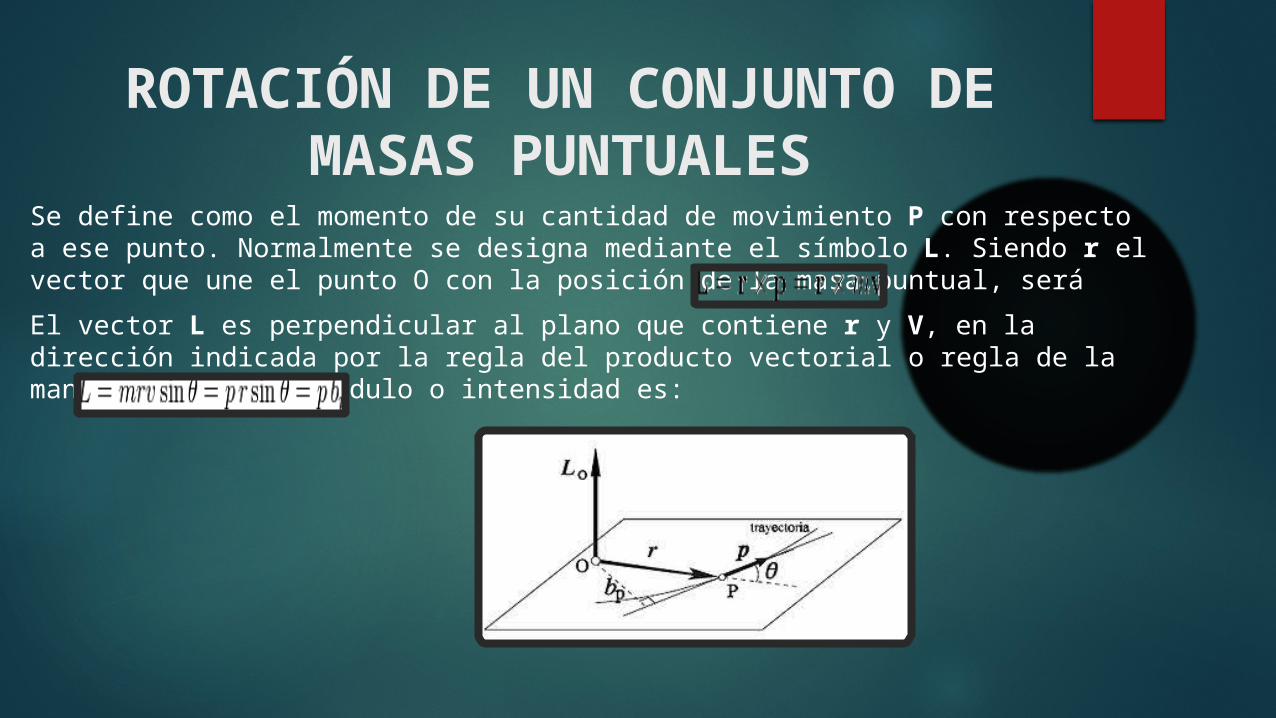
ROTACIÓN DE UN CONJUNTO DE MASAS PUNTUALES
Se define como el momento de su cantidad de movimiento P con respecto a ese punto. Normalmente se designa mediante el símbolo L. Siendo r el vector que une el punto O con la posición de la masa puntual, será
El vector L es perpendicular al plano que contiene r y V, en la dirección indicada por la regla del producto vectorial o regla de la mano derecha y su módulo o intensidad es:
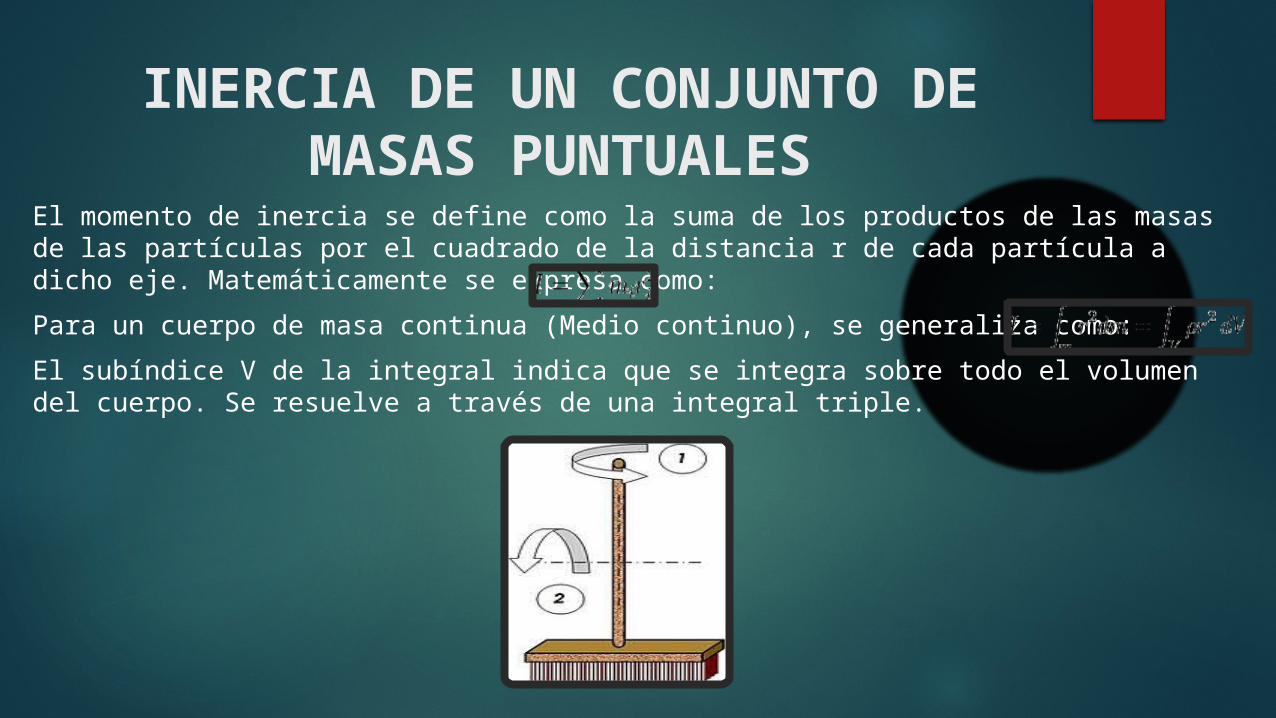
INERCIA DE UN CONJUNTO DE MASAS PUNTUALES
El momento de inercia se define como la suma de los productos de las masas de las partículas por el cuadrado de la distancia r de cada partícula a dicho eje. Matemáticamente se expresa como:
Para un cuerpo de masa continua (Medio continuo), se generaliza como:
El subíndice V de la integral indica que se integra sobre todo el volumen del cuerpo. Se resuelve a través de una integral triple.

APLICACIONES DE LAS LEYES DE NEWTON
Primera Ley (Segunda Condición de Equilibrio):
Si la sumatoria de los momentos actuantes sobre un cuerpo en cero, el cuerpo se encuentra en reposo o gira con Movimiento Circular Uniforme.
Segunda Ley:
El momento total aplicado a un cuerpo es igual al momento de inercia del cuerpo multiplicado por su aceleración angular.
MOMENTO DE INERCIA DE UN CUERPO RÍGIDO
Magnitud escalar que viene dada por:
El momento de inercia de un cuerpo rígido depende de su eje de giro (puesto que el radio de giro de cada partícula depende del eje). Como un sólido está constituido por un número muy grande de partículas, en vez de tratarlo como un sistema discreto puede ser analizado como un sistema continuo.
RADIO DE GIRO
Se llama radio de giro a la distancia desde el eje de giro a un punto donde podríamos decir q está concentrada toda la masa de un cuerpo de modo que el momento de inercia el eje se obtenga como producto de la masa del cuerpo por el cuadrado del radio de giro.
TEOREMA DE LOS EJES PARALELOS
Se da en el momento de inercia con respecto a cualquier eje paralelo a un eje que pasa por el centro de una masa, más un producto de la masa por el cuadrado de la distancia entre los dos ejes.Este teorema se da el momento de inercia de un cuerpo cuando el eje de rotación pasa paralelo a un eje de rotación que pasa por el centro de masas del cuerpo. Se expresa de la siguiente manera:
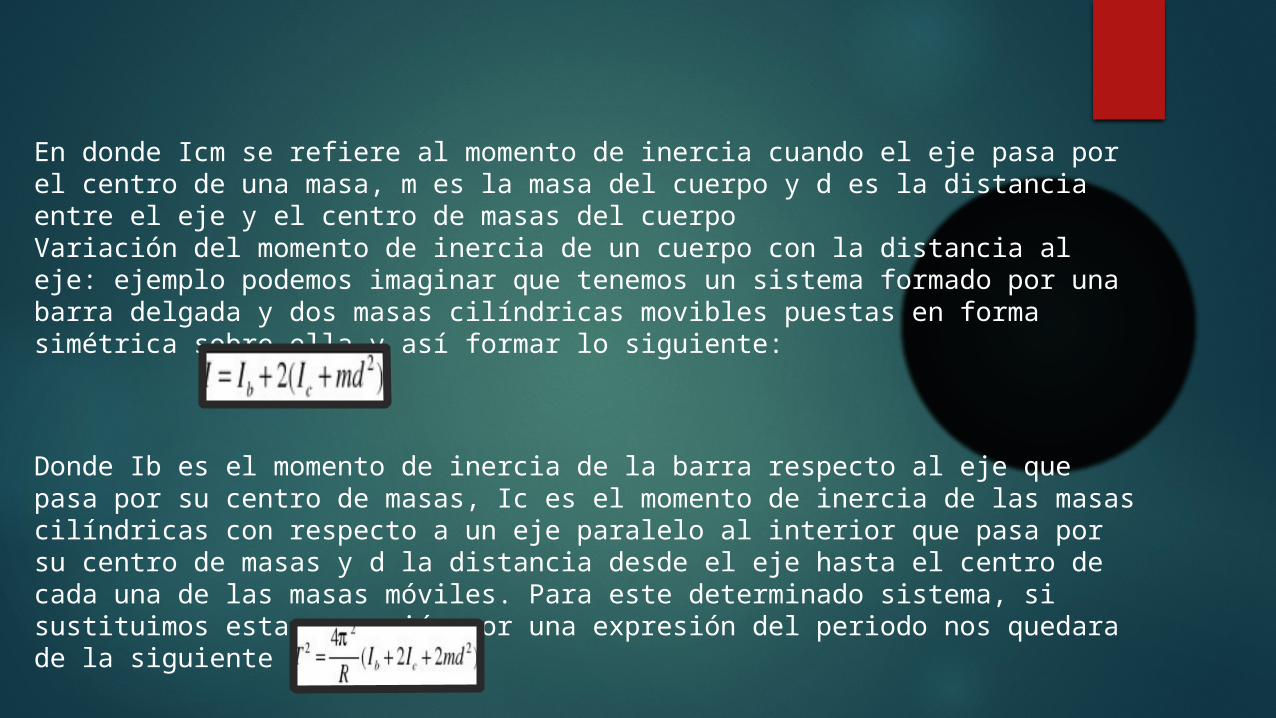
En donde Icm se refiere al momento de inercia cuando el eje pasa por el centro de una masa, m es la masa del cuerpo y d es la distancia entre el eje y el centro de masas del cuerpo Variación del momento de inercia de un cuerpo con la distancia al eje: ejemplo podemos imaginar que tenemos un sistema formado por una barra delgada y dos masas cilíndricas movibles puestas en forma simétrica sobre ella y así formar lo siguiente:
Donde Ib es el momento de inercia de la barra respecto al eje que pasa por su centro de masas, Ic es el momento de inercia de las masas cilíndricas con respecto a un eje paralelo al interior que pasa por su centro de masas y d la distancia desde el eje hasta el centro de cada una de las masas móviles. Para este determinado sistema, si sustituimos esta expresión por una expresión del periodo nos quedara de la siguiente manera:
Top Related