
TRABAJODE DIPLOMA
113
Universidad de Matanzas ¨ Camilo Cienfuegos ¨ Facultad de Ingeniería QuímicaMecánica TRABAJODE DIPLOMA Titulo: Implementación de variantes para el diseño de reductor de velocidad Autor: Fidel Castro Pérez Tutor: Ing. Oscar Fernández Fernández MATANZAS 2010
Transcript of TRABAJODE DIPLOMA
Universidad de Matanzas ¨ Camilo Cienfuegos ¨
Facultad de Ingeniería QuímicaMecánica TRABAJODE DIPLOMA
Titulo: Implementación de variantes para el diseño de reductor de
velocidad
Autor: Fidel Castro Pérez
Tutor: Ing. Oscar Fernández Fernández
MATANZAS 2010
i
______________________________________________________________________________
______________________________________________________________________________
______________________________________________________________________________
______________________________________________________________________________
______________________________________________________________________________
______________________________________ _____________ Presidente del Tribunal Firma
______________________________________ _____________ Mimbro del Tribunal Firma
______________________________________ _____________ Miembro del Tribunal Firma
ii
Declaración de Autoridad Declaro ser el único autor de este Trabajo de Diploma realizado en la
Universidad de Matanzas “Camilo Cienfuegos” como parte de la culminación de
los estudios en la especialidad de Ingeniería Mecánica, por lo que autorizo que
el mismo sea utilizado con la finalidad que se estime necesaria.
Fidel Castro Pérez

iii
“Debemos prepararnos…. desarrollar tecnología que nazcan de las condiciones
concretas de nuestros sueldos, de nuestra materia prima, de nuestro ambiente cultural y
de nuestro desarrollo actual, para poder dar al mercado cubano y al mercado mundial
los productos de nuestro sueldos elaborados hasta el máximo permitido por la técnica,
de acuerdo con la inventiva y la ciencia de nuestros propios tecnólogos….”
Ernesto Che Guevara
iv
Dedico la realización de este trabajo a todas las personas que quiero y a los que me
brindaron su apoyo incondicional:
Ø En especial a mis padres adorados y aun mas mi madre por brindarme su apoyo,
que supo guiarme en todos estos los años de la carrera por el camino correcto,
con amor y sacrificio haciéndome ver la necesidad de ser útil, cumpliendo así lo
que ella más añora en su vida.
Ø A mi hermana por ser una de las personas más importantes en mi vida y por
brindarme toda su ayuda y la fuerza necesaria para seguir adelante en estos años.
Ø A toda mi familia en general que de una forma u otra me brindaron todo su
apoyo.
Ø A mi tutor, Ing. Oscar Fernández Fernández. Por dedicarme parte de su
valioso tiempo y darme la ayuda que siempre espere.
Ø A mis compañeros de la carrera que siempre estuvimos unidos en estos años.
v
Quisiera expresar mis más sinceros agradecimientos a todas aquellas personas que con
su valiosa colaboración hicieron posible la realización de este trabajo:
Ø A mis padres por su apoyo en todo momento, ya que hicieron suyas mis
preocupaciones y problemas.
Ø A mi tutor: Ing. Oscar Fernández Fernández
Ø A todos los profesores que hicieron posible formarme como un Ingeniero
Mecánico.
Ø A todos los compañeros en general que de una forma u otra hicieron posible la
realización de este trabajo.
vi
Para dar cumplimiento a una de las orientaciones metodológicas del nuevo plan de
estudio de la carrera de Ingeniería Mecánica referido a la Asignatura Elementos de
Máquinas, nos propusimos la elaboración de diferentes variantes para diseñar reductores
de velocidad.
Para desarrollar este trabajo realizamos un análisis del programa de estudio de la
asignatura referente al tema en cuestión, recopilamos información actualizada a través
de textos, artículos y conferencias, además de búsqueda en internet que complementará
toda la información.
Este trabajo lo consideramos de gran importancia ya que el mismo puede contribuir al
desarrollo de habilidades en la solución de la actividad práctica del estudiante, así como
incrementar el conocimiento de lo tratado en la asignatura y aumentar la disponibilidad
de información para estudiantes y profesores. El trabajo mejora la disponibilidad de
información sobre el tema que constituye un material de estudio de la asignatura.
vii
In order to give an one belonging to orientations fulfillment metodológicas of the new
curriculum of the race of Mechanical Engineering referred to Máquinas's Subject Of
Study Elementos, we intended the elaboration of different variants to design reducers of
velocity.
In order to develop this work we accomplished an analysis of the program of study of the subject of study relating to the theme in point, we compiled information updated through texts, goods and you confer, in addition to quest in internet that he will complement all of the information. This work we considered him of vital importance right now than he can contribute to the development of abilities in the solution of practical activity of the student, as well as incrementing the knowledge of what processed in the subject of study and increasing the availability of information for students the same and professors. The work improves the availability of topical information that it constitutes a subject of study's material of study.
viii
Introducción 1
CAPÍTULO I: FUNDAMENTACIÓN TEÓRICA. 4
1.1 Generalidades 4
1.2 Principales características del plan de estudio en lo referente a la asignatura
elementos de maquinas. 4
1.3 Fundamentación de la asignatura Elemento de Máquinas. 5
1.4 Sistema de habilidades de la asignatura Elemento de Máquinas. 6
1.5 Indicaciones metodológicas y de organización de la asignatura elementos de
maquinas. 7
1.6 Análisis de los objetivos del cuarto año académico. 8
CAPITULO II Variantes para el diseño del reductor 10
2.1 Propuesta de las variantes de proyecto a realizar por los estudiantes. 10
2.2 Tareas a realizar en el proyecto de curso. 17
CAPITULO III Reductores de velocidad 20
3.1 Clasificación de los reductores de velocidad. 21
3.2Clasificación por tipo de engranajes. 22
3.2.1 Reductores de ruedas dentadas. 22
3.2.2 Reductores sinfín. 23
3.2.3 Reductores de velocidad Planetarios. 23
3.2.4 Tipo de reductores de velocidad por engranaje. 24
3.3 Calificación de lo reductores de velocidad. 24
3.3.1 Reductores con los ejes de los extremos de árboles paralelos. 24
3.3.2 Reductores de Ejes Perpendiculares. 25
3.3.3 Reductores de Ejes Cruzados. 25
CAPITULO IV Metodologías y Cálculo para diseñar un reductor de velocidad.
ix
4.1 – Introducción 27
4.2 Cálculo cinemático. 28
4.3 Metodología y Cálculo de los Engranajes. 29
4.3.1 Cálculo de Proyección de Engranajes Cilíndricos. 29
4.4 Metodología de cálculo de correa trapezoidal. 42
4.4.1 Criterio de cálculo. 42
4.4.2 Cálculo de capacidad tractiva. 42
4.4.3 Cálculo de durabilidad. 44
4.4.4 Metodología para el diseño de trasmisiones por correa trapeciales. 47
4.5 Calculo de la transmisión por cadena de rodillo.Recomendaciones de diseño. 49
4.5.1 Pasos para el cálculo 51
4.6 Diseño de la carcasa. 55
4.7 Metodología y Cálculo de los árboles. 57
4.7.1Introducción. 57
4.7.2 El acero como material de árboles y ejes. 57
4.7.3 Criterios para el dimensionado previo de árboles. 58
4.7.4 Cálculo de Comprobación de los Árboles. 65
4.7.5 Cálculo de comprobación de resistencia a la fatiga. 68
4.7.6 Cálculo de Comprobación Según Norma ASME B106. 70
4.7.7 Cálculo de Comprobación según Serensen (GoodmanSoderbeg modificado). 71
4.8 Selección para los cojinetes de Bolas. 77
4.8.1 Selección de tapas de rodamientos 80
4.9 Metodología y cálculo de los elementos de unión entre el árbol y la rueda. 82
4.9.1 Cálculo de Chaveta prismática 82
4.11 Cálculo de los acoplamientos. 83
4.10 Formas de lubricación de los reductores de velocidad. 85
4.11.1 Cálculo de acoplamiento por engranajes 87
4.11.2 Cálculo de acoplamiento elástico. 87
4.11.3 Cálculo de acoplamiento de manguito. 88
4.11.4 Cálculo de acoplamiento de manguito partido. 89
4.11.5 Metodología para calcular un reductor de velocidad 91
Conclusiones 93
Recomendaciones 94
x
Bibliografía 95
Anexos 96
1
Las Comisiones Nacionales de Carrera, persiguen como objetivo fundamental orientar
el proceso para la formación de un profesional adecuado a los requerimientos de su
tiempo, y por otra parte desempeña un papel importante, el trabajo metodológico
desarrollado y el diseño adecuado de los documentos que apoyan el proceso de
enseñanza aprendizaje El proceso educativo, presenta características dinámicas que
deben tenerse en cuenta, si se pretende alcanzar una educación de calidad. Esto
presupone un proceso de validación permanente, que permita la actualización constante
de los mejores métodos y estrategias de enseñanza y ésta función es asumida por los
planes de estudio.
En la elaboración y perfeccionamiento del nuevo plan de estudios D para el
Ingeniero Mecánico cubano, que enfrentará las exigencias de los inicios del siglo XXI,
se ha tenido en consideración no solo la proyección nacional de esta profesión, también
la situación que actualmente se plantea por las instituciones que marcan punta en el
desarrollo de la Ingeniería Mecánica, manteniendo los principios rectores de la
educación cubana expresados en los planes de estudio anteriores.
Este plan de estudio se caracteriza por el empleo de nuevos métodos en el proceso
de enseñanza aprendizaje que centran la atención en el autoaprendizaje.
El ingeniero mecánico cubano es un profesional con conocimientos, habilidades y
valores, que le permitan poner al servicio de la humanidad y en particular de la sociedad
cubana el desarrollo de la ciencia y la tecnología vinculadas a la carrera, con
racionalidad económica, adecuado uso de los recursos humanos y materiales,
minimizando el deterioro del medio ambiente y preservando los principios éticos de su
sociedad.
2
Este nuevo plan de estudio define como campos de acción que debe dominar el
profesional los siguientes:
Diseño.
Fabricación.
Operación.
Mantenimiento.
Enseñanza.
Para dar respuesta al encargo social de éste ingeniero, cuya actividad profesional se
inicia en el segundo decenio del III Milenio, se define el modelo del profesional por un
sistema de objetivos entre los cuales están:
Diseñar partes y piezas de máquinas, redes técnicas, procesos tecnológicos para dar
respuesta a las necesidades del mantenimiento, que le permitan la utilización adecuada
de las máquinas, equipos e instalaciones a su cargo.
Seleccionar elementos, componentes y equipos tanto para el diseño y la construcción
como para el mantenimiento.
El Ingeniero Mecánico en el desarrollo de su actividad profesional según las esferas
de actuación tiene entre sus funciones, diseñar Elementos de Máquinas, redes técnicas
y procesos tecnológicos para la producción y el reacondicionamiento de piezas en
pequeña escala.
El presente estudio, realizado en la asignatura Elementos de Maquinas persigue, dar
solución a una de las Indicaciones Metodológicas y de Organización de la Disciplina
Mecánica Aplicada la cual plantea que:
La asignatura Elementos de Máquinas tiene un proyecto docente que se
desarrollará durante el transcurso de la asignatura y que formará parte fundamental del
sistema de evaluación de las mismas. El Proyecto tendrá asignado un tutor y cumplirá
con todos los requisitos establecidos para los mismos, además de que tendrá que ser
defendido ante un tribunal designado por la dirección de departamento donde radica la
asignatura, al ser concluido.
La asignatura Elementos de Máquinas es una asignatura año. Por lo cual el
estudiante solo recibirá una nota al concluir la segunda parte de la misma.
Debido a esto se deriva el problema de esta tesis:
3
A partir de la recomendación que aparece en el nuevo plan de estudio de la carrera,
sobre la realización de un proyecto de curso durante el transcurso de la asignatura
Elementos de Maquinas, es necesario organizar algunas variantes de diseño que nos
permitan cumplir con éste objetivo.
Un profundo estudio de la disciplina relacionada y la consulta de los documentos
que rigen el proceso de enseñanza aprendizaje, nos permiten definir la siguiente
hipótesis.
Hipótesis:
Mediante la elaboración de diferentes variantes de diseño de reductores de
velocidad, ¿Será posible cumplir los objetivos que plantea la disciplina y la
asignatura al respecto?
Objetivos
v Elaborar variantes de diseño de reductores de velocidad que cumplan con lo
orientado en el nuevo plan de estudio de la carrera de Ingeniería Mecánica en lo
referente a la asignatura Elementos de Máquinas.
v Organizar una secuencia metodológica del diseño de un reductor de velocidad
Para lograr esto último deben realizarse un conjunto de tareas:
v Análisis del plan de estudio D en lo referente a la asignatura elementos de
maquinas
v Conformar las variantes de los diferentes reductores
v Elaboración de secuencia de pasos para diseñar un reductor de velocidad. .

4
CAPÍTULO I: FUNDAMENTACIÓN TEÓRICA.
1.1 Generalidades Con el fin de acercar a los alumnos a la realidad de la vida profesional en la
asignatura, se ha diseñado un perfeccionamiento del plan de estudio el cual tiene como
objetivo:
Que los alumnos desarrollen aplicaciones prácticas con los conocimientos
adquiridos en los años anteriores, ya que se había detectado anteriormente que se
encontraban con problemas a la hora de intentar llevarlas a la práctica en casos
reales.
Que los alumnos aprendan a trabajar en grupo, a tomar decisiones y a
arreglárselas solos (acudan a biblioteca, consigan catálogos, visiten una fábrica
para conseguir información,...).
Que se familiaricen con la problemática del diseño.
Que utilicen normas y catálogos.
Que adquieran una perspectiva global de lo que es desarrollar un proyecto o
anteproyecto
Que aprendan a presentar informes y memorias de proyectos.
Que utilicen el ordenador como herramienta de trabajo (CAD, hojas de cálculo,...).
Acercar a los alumnos al mundo de la empresa.
1.2 Principales características del plan de estudio en lo referente a la
asignatura elementos de maquinas.
Este plan de estudio se caracteriza por el empleo de nuevos métodos en el proceso de
enseñanza aprendizaje que centran la atención en el autoaprendizaje con una
consecuente racionalización de los contenidos que se imparten a lo esencial y el empleo
de técnicas informáticas tanto para impartir la docencia como en el apoyo del auto
aprendizaje. Establecer una carrera de perfil amplio que permita lograr Ingenieros
5
Mecánicos con una sólida formación básica, con habilidades para la solución de los
problemas más generales y frecuentes de su profesión, que incluya la apropiación del
modo de actuación profesional que caracteriza ésta carrera. El tiempo de duración d e
la carrera es de cinco años, sin dejar de tener en cuenta la existencia de una tendencia
mundial a la reducción brusca en los planes de estudio. Un elemento importante
incluido desde el plan de estudio anterior (C’) es la disciplina integradora, cuyo carácter
responde a las especificidades de la carrera y que integra en el proceso de formación lo
académico con la práctica laboral y el trabajo científico.
• El sistema principal está compuesto por conferencias y clases prácticas.
• Los trabajos extraclases que forman parte del sistema de evaluación incluyen
problemas que integran conocimientos de más de un tema.
• Durante el desarrollo de la disciplina deben evaluarse aquellos temas de mayor
complejidad como vía de retroalimentación en el conocimiento de la materia
aprendida por los estudiantes y para facilitar una mejor fijación de ésta por los
mismos.
• Las asignaturas Teoría de los Mecanismos y Elementos de Máquinas tienen un
proyecto docente que se desarrollará durante el transcurso de la asignatura y que
formará parte fundamental del sistema de evaluación de las mismas. El Proyecto
tendrá asignado un tutor y cumplirá con todos los requisitos establecidos para los
mismos, además de que tendrá que ser defendido ante un tribunal designado por la
dirección de departamento donde radica la asignatura, al ser concluido.
• La asignatura Elementos de Máquinas es una asignatura año. Por lo cual el
estudiante solo recibirá una nota al concluir la segunda parte de la misma.
1.3 Fundamentación de la asignatura Elemento de Máquinas. La asignatura Elemento de Máquina es la encargada de diseñar, seleccionar y
calcular los diferentes elementos que componen las máquinas, según su tamaño y la
complejidad de su estructura, consta de cierto número de unidades de montaje, es decir,
6
conjuntos y elementos (piezas). Hay elementos de máquinas de aplicación general y
otros, de aplicación especial.
Los elementos de maquinas de aplicación general son: los elementos de las uniones
inseparables (fijas) y separables (desmontables); las partes de las transmisiones por
fricción y por engranajes; los árboles y eje, los acoplamientos, cojinetes; resortes; piezas
de armazón. Existe una infinidad de elemento de maquinas que, siendo de un mismo
tipo, van acoplados en una gran diversidad de maquinas y desempeñan iguales
funciones, lo que ha permitido destacar su estudio en una independencia de la ciencia
denominada elementos de máquinas. Las piezas o elementos de aplicación especial solo
se emplean en unos tipos determinados de máquinas.
La asignatura presentara un informe unificado de todas las actividades docentes
recomendadas por las resoluciones vigentes y propone la inclusión de un proyecto
docente que se desarrollará durante el transcurso de la asignatura y que formará parte
fundamental del sistema de evaluación de las mismas. El Proyecto tendrá asignado un
tutor y cumplirá con todos los requisitos establecidos para los mismos, además de que
tendrá que ser defendido ante un tribunal designado por la dirección de departamento
donde radica la asignatura, al ser concluido.
1.4 Sistema de habilidades de la asignatura Elemento de Máquinas. El sistema de habilidades de la asignatura es identificar las funciones de diseño en
la ingeniería. Es la determinación de las principales dimensiones de los diferentes
elementos de máquina, así como los parámetros fundamentales para su selección.
• Identificar los criterios principales de la capacidad de trabajo de las máquinas y
para la elección del material según su aplicación.
• Determinar las dimensiones principales de árboles y ejes, así como la forma de
los mismos.
• Selección de cojinetes de rodamientos y cálculos de comprobación de cojinetes
de deslizamiento.
• Calcular y seleccionar transmisiones por engranaje cilíndrico, cónico y sinfín.
• Diseñar transmisiones por engranajes cilíndricos.
• Realizar los cálculos fundamentales para seleccionar y comprobar la resistencia
de las transmisiones por correa, cadena y fricción.
7
• Calcular las dimensiones principales y comprobar la resistencia de las uniones
árbol cubo, seleccionando los elementos normalizados.
• Calcular las uniones roscadas, determinando el tipo de perfil según las normas
vigentes.
• Calcular las dimensiones geométricas principales de los muelles y comprobar la
resistencia de los mismos.
• Seleccionar los acoplamientos para cada aplicación.
• Determinar las dimensiones principales de embragues y frenos de fricción, así
como los parámetros fundamentales para su selección.
• Desarrollar habilidades en el trabajo con software especializado y bases de datos
para el diseño y selección de elementos de maquinas.
1.5 Indicaciones metodológicas y de organización de la asignatura
elementos de maquinas.
La organización de la asignatura elemento de máquina tiene como desarrollo evaluar
todos los temas de mayor complejidad, Además tiene un proyecto docente que se
desarrollara durante el transcurso de la asignatura y que formara parte fundamental del
sistema de evaluación de las mismas.
• La asignatura debe tener un enfoque de carácter práctico sin dejar de argumentar
científicamente las bases conceptuales necesarias.
• Durante el desarrollo de la asignatura deben evaluarse aquellos temas de mayor
complejidad como vía de retroalimentación en el conocimiento de la materia
aprendida por los estudiantes y para facilitar una mejor fijación de ésta por los
mismos.
• Los laboratorios deben ser evaluados, pidiéndosele un informe sobre los aspectos
prácticos desarrollados en éstos, debiendo formar parte del sistema evaluativo.
• La asignatura Elementos de Máquinas tiene un proyecto docente que se
desarrollará durante el transcurso de la asignatura y que formará parte
fundamental del sistema de evaluación de las mismas. El Proyecto tendrá
asignado un tutor y cumplirá con todos los requisitos establecidos para los
8
mismos, además de que tendrá que ser defendido al ser concluido, ante un tribunal
designado por la dirección de departamento donde radica la asignatura,.
• La asignatura Elementos de Máquinas es una asignatura año. Por lo cual el
estudiante solo recibirá una nota al concluir la segunda parte de la misma.
• La evaluación del proyecto docente se realizará solo a concluir la segunda parte
de la asignatura, Elementos de Máquinas II.
1.6 Análisis de los objetivos del cuarto año académico. Los objetivos del cuarto año académico son analizados también para tener en cuenta
en la asignatura, pues sus acciones tributan a su cumplimiento, estos en muchos casos
coinciden con los de la disciplina, como se muestra en la siguiente lista, en la que
aparecen los relacionados a las actividades de la asignatura:
1. Desarrollar el sentido de la responsabilidad social en los futuros profesionales
2. Desarrollar conocimientos y habilidades científico técnicas específicas de la
profesión del Ingeniero Mecánico.
Ø Diseñar los diferentes elementos de máquinas.
Ø Seleccionar acoplamientos mecánicos.
Ø Seleccionar transmisiones por correas, cadenas y fricción.
Ø Seleccionar los materiales y lubricantes adecuados para el cálculo de los
elementos de máquina aplicando criterios técnico económicos.
3. Valorar la capacidad de trabajo de los elementos de máquinas, aplicar
criterios de diseño y selección de elementos de máquina para dar respuesta
a las diferentes esferas de actuación del ingeniero mecánico.
4. Elaborar documentos y programas necesarios para dar solución a los problemas
profesionales derivados del mantenimiento según las normas y recomendaciones
estatales vigentes de seguridad, medio ambiente y eficiencia energética.
5. Valorar el impacto económico y ambiental del trabajo que realiza, ejercitándolo
en el desarrollo del proyecto Aplicar el método científico de trabajo en el diseño
y ejecución de proyectos.
Como se puede apreciar del análisis realizado al plan de estudio D, dentro de la
disciplina Mecánica Aplicada la asignatura Elementos de Máquinas, que constituye una
9
asignatura año, recomienda la realización de un proyecto docente que se desarrollará
durante el transcurso de la asignatura y que formará parte fundamental del sistema de
evaluación de la misma. Nosotros consideramos que una de las variantes de este
proyecto pude ser el diseño de un Reductor de Velocidad.
Esta variante de diseñar un reductor de velocidad puede cumplir con el objetivo
del proyecto docente, teniendo en cuenta varios factores como son:
1 La asignatura Elemento de Máquina es la encargada de diseñar, seleccionar y
calcular los diferentes elementos que componen las máquinas
2 Dentro del sistema de habilidades de la asignatura aparecen los siguientes
elementos:
• Determinar las dimensiones principales de árboles y ejes, así como la forma de
los mismos.
• Selección de cojinetes de rodamientos y cálculos de comprobación de cojinetes
de deslizamiento.
• Calcular y seleccionar transmisiones por engranaje cilíndrico, cónico y sinfín.
• Diseñar transmisiones por engranajes cilíndricos.
• Realizar los cálculos fundamentales para seleccionar y comprobar la resistencia
de las transmisiones por correa, cadena y fricción.
* Calcular las dimensiones principales y comprobar la resistencia de las uniones
árbol cubo, seleccionando los elementos normalizados
• Desarrollar habilidades en el trabajo con software especializado y bases de datos
para el diseño y selección de elementos de maquinas.
3 Los reductores se utilizan ampliamente en todas las ramas de la Industria
Contemporánea.
10
CAPITULO II Variantes para el diseño del reductor
2.1 Propuesta de las variantes de proyecto a realizar por los
estudiantes Las variantes propuestas para el diseño del reductor fueron escogidas atendiendo a
diferentes aspectos:
a) Los reductores de ruedas dentadas cilíndricas, gracias al amplio diapasón de
potencia que pueden transmitir, a su longevidad, facilidad de fabricación y
mantenimiento, tienen una gran difusión industrial.
b) Cuando i ≤ 6,3 se emplean reductores cilíndricos de una sola etapa. ( de esa forma se evita el aumento de las dimensiones exteriores)
c) El reductor cilíndrico de un solo escalón se emplea para un amplio diapasón de potencias
d) Los valores máximos de las relaciones de transmisión en las transmisiones por
correas se encuentran entre 10 y 15.
e) Las trasmisiones por cadenas tienen gran difusión para potencias de hasta 100 KW y
relaciones de transmisión menores de 8.
f) Experiencias recogidas de los reductores de velocidad que se diseñaron en planes de
estudios anteriores al plan D.
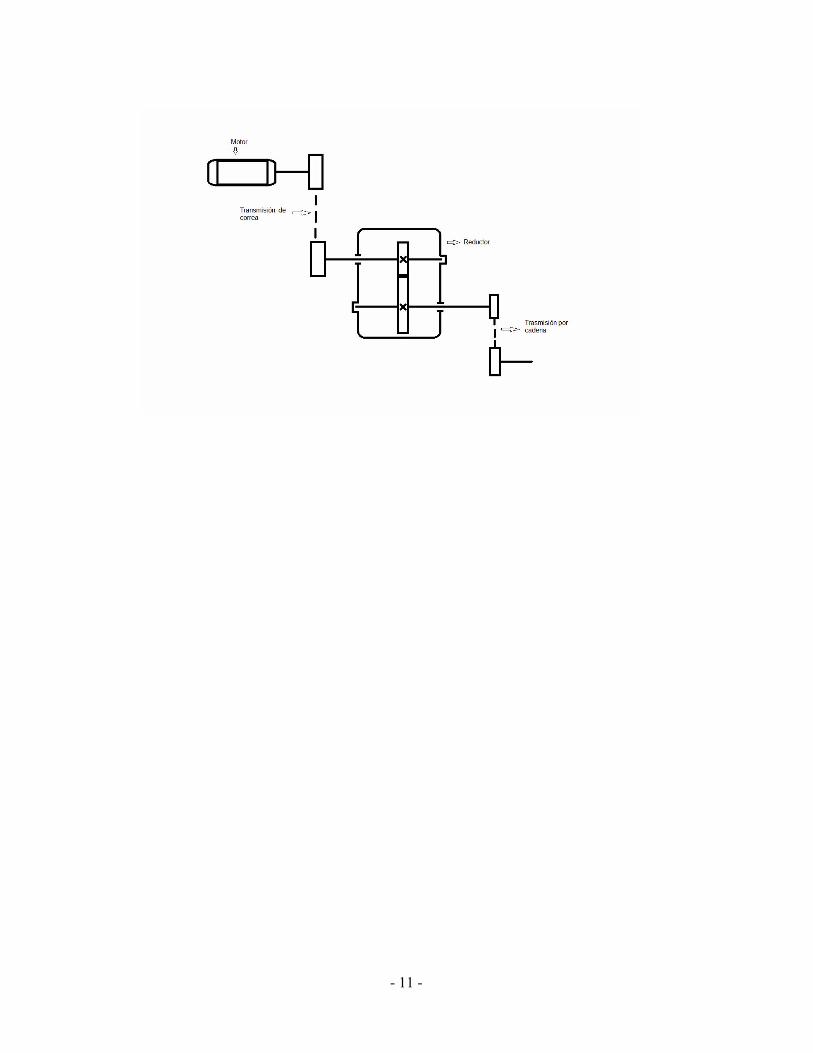
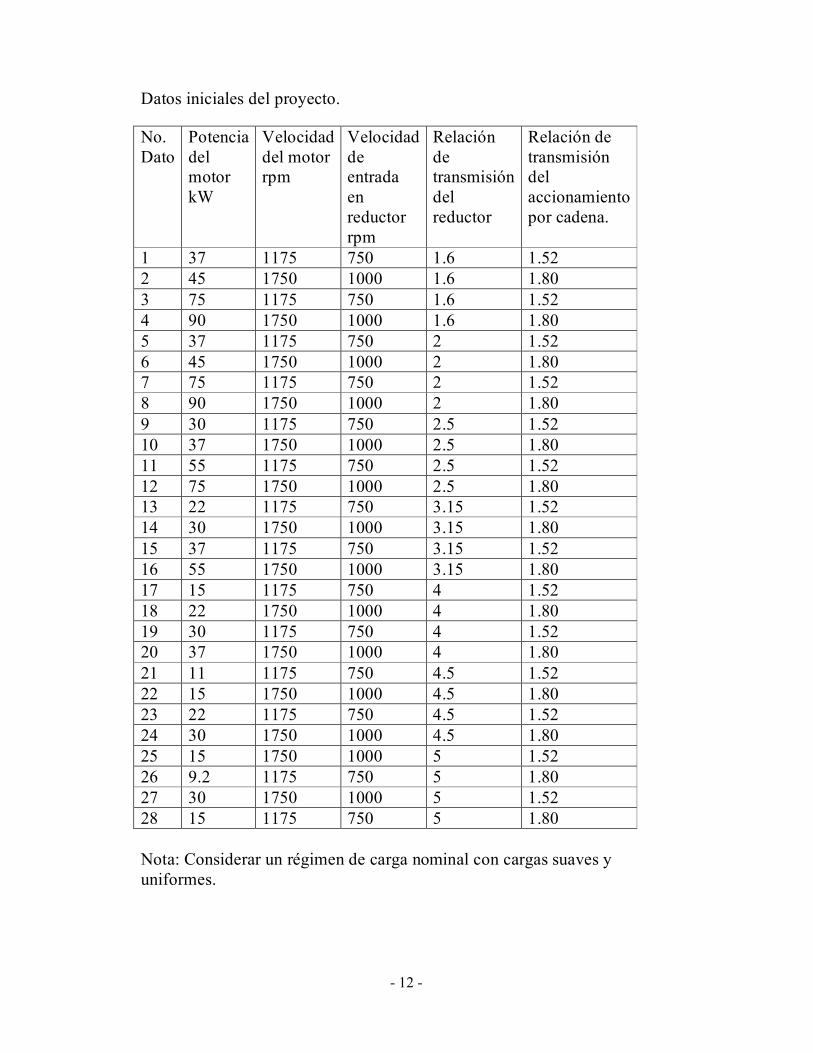
a) Primera variante
DISEÑO DE UN REDUCTOR DE VELOCIDAD CON ENGRANAJE CILÍNDRICO DE EJES PARALELOS Y CONTACTO EXTERIOR.
Esquema del accionamiento
11
12
Datos iniciales del proyecto.
No. Dato
Potencia del motor kW
Velocidad del motor rpm
Velocidad deentrada enreductor rpm
Relación detransmisión del reductor
Relación de transmisión del accionamiento por cadena.
1 37 1175 750 1.6 1.52 2 45 1750 1000 1.6 1.80 3 75 1175 750 1.6 1.52 4 90 1750 1000 1.6 1.80 5 37 1175 750 2 1.52 6 45 1750 1000 2 1.80 7 75 1175 750 2 1.52 8 90 1750 1000 2 1.80 9 30 1175 750 2.5 1.52 10 37 1750 1000 2.5 1.80 11 55 1175 750 2.5 1.52 12 75 1750 1000 2.5 1.80 13 22 1175 750 3.15 1.52 14 30 1750 1000 3.15 1.80 15 37 1175 750 3.15 1.52 16 55 1750 1000 3.15 1.80 17 15 1175 750 4 1.52 18 22 1750 1000 4 1.80 19 30 1175 750 4 1.52 20 37 1750 1000 4 1.80 21 11 1175 750 4.5 1.52 22 15 1750 1000 4.5 1.80 23 22 1175 750 4.5 1.52 24 30 1750 1000 4.5 1.80 25 15 1750 1000 5 1.52 26 9.2 1175 750 5 1.80 27 30 1750 1000 5 1.52 28 15 1175 750 5 1.80
Nota: Considerar un régimen de carga nominal con cargas suaves y uniformes.
13
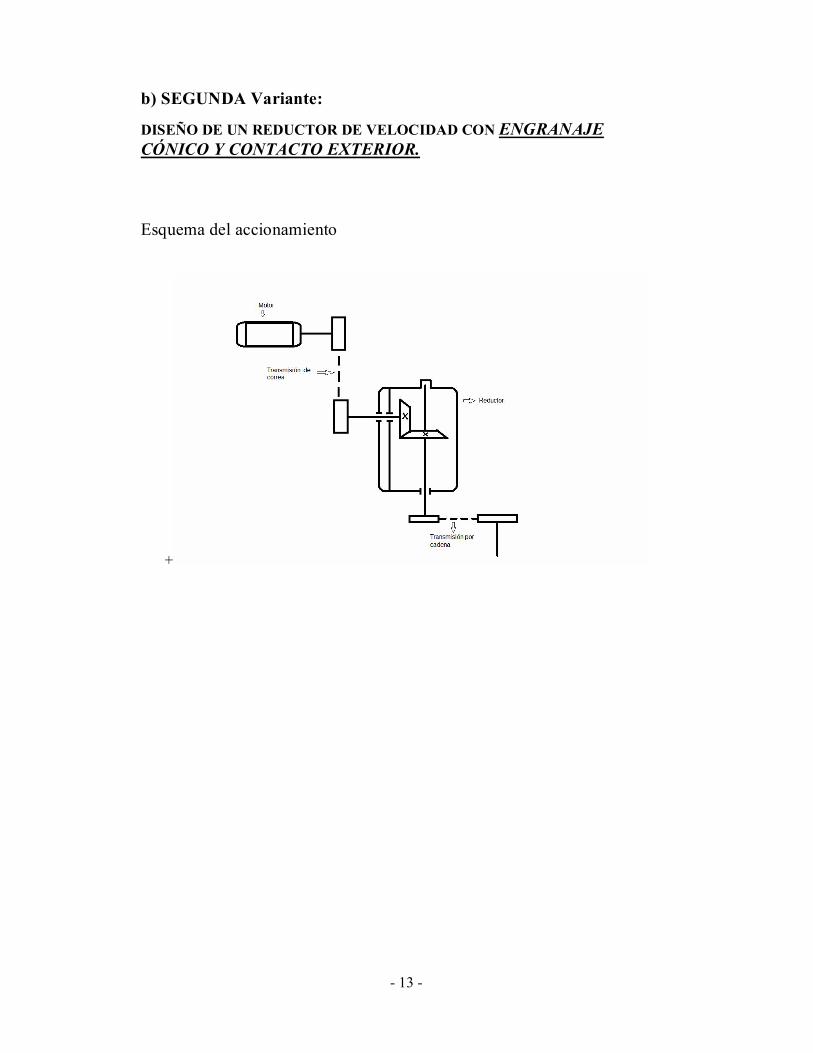
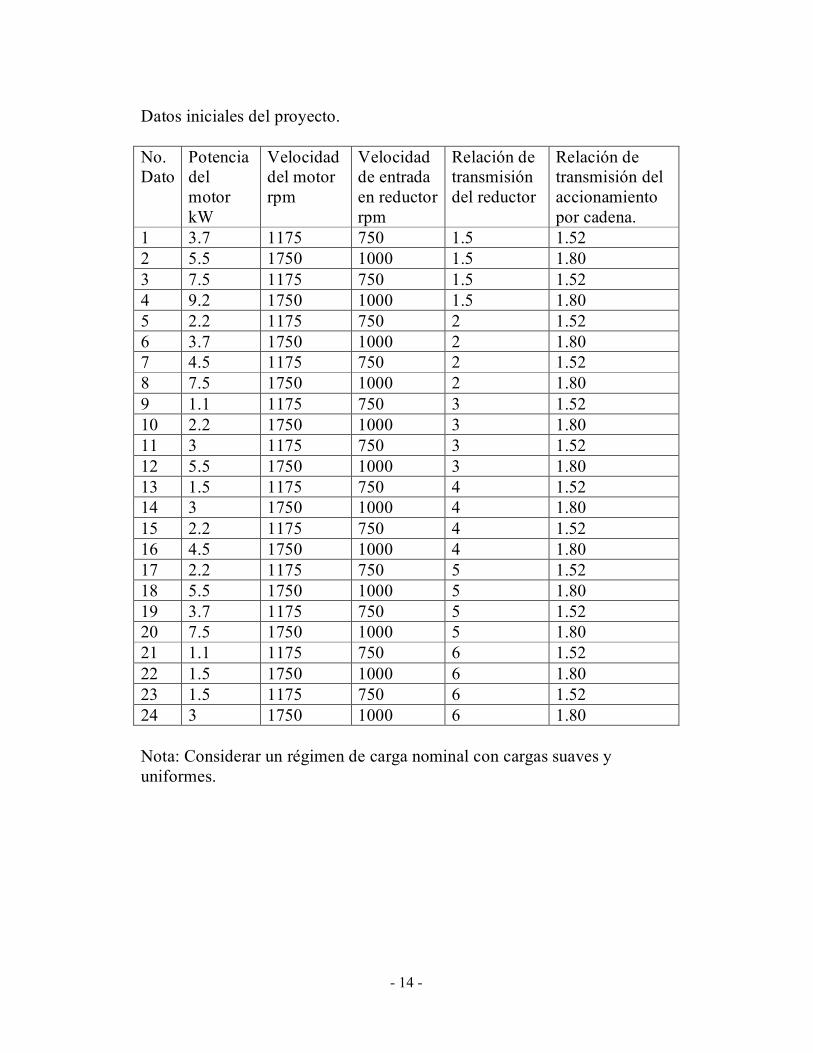
b) SEGUNDA Variante:
DISEÑO DE UN REDUCTOR DE VELOCIDAD CON ENGRANAJE CÓNICO Y CONTACTO EXTERIOR.
Esquema del accionamiento
+
14
Datos iniciales del proyecto.
No. Dato
Potencia del motor kW
Velocidad del motor rpm
Velocidad de entrada en reductor rpm
Relación de transmisión del reductor
Relación de transmisión del accionamiento por cadena.
1 3.7 1175 750 1.5 1.52 2 5.5 1750 1000 1.5 1.80 3 7.5 1175 750 1.5 1.52 4 9.2 1750 1000 1.5 1.80 5 2.2 1175 750 2 1.52 6 3.7 1750 1000 2 1.80 7 4.5 1175 750 2 1.52 8 7.5 1750 1000 2 1.80 9 1.1 1175 750 3 1.52 10 2.2 1750 1000 3 1.80 11 3 1175 750 3 1.52 12 5.5 1750 1000 3 1.80 13 1.5 1175 750 4 1.52 14 3 1750 1000 4 1.80 15 2.2 1175 750 4 1.52 16 4.5 1750 1000 4 1.80 17 2.2 1175 750 5 1.52 18 5.5 1750 1000 5 1.80 19 3.7 1175 750 5 1.52 20 7.5 1750 1000 5 1.80 21 1.1 1175 750 6 1.52 22 1.5 1750 1000 6 1.80 23 1.5 1175 750 6 1.52 24 3 1750 1000 6 1.80
Nota: Considerar un régimen de carga nominal con cargas suaves y uniformes.
15
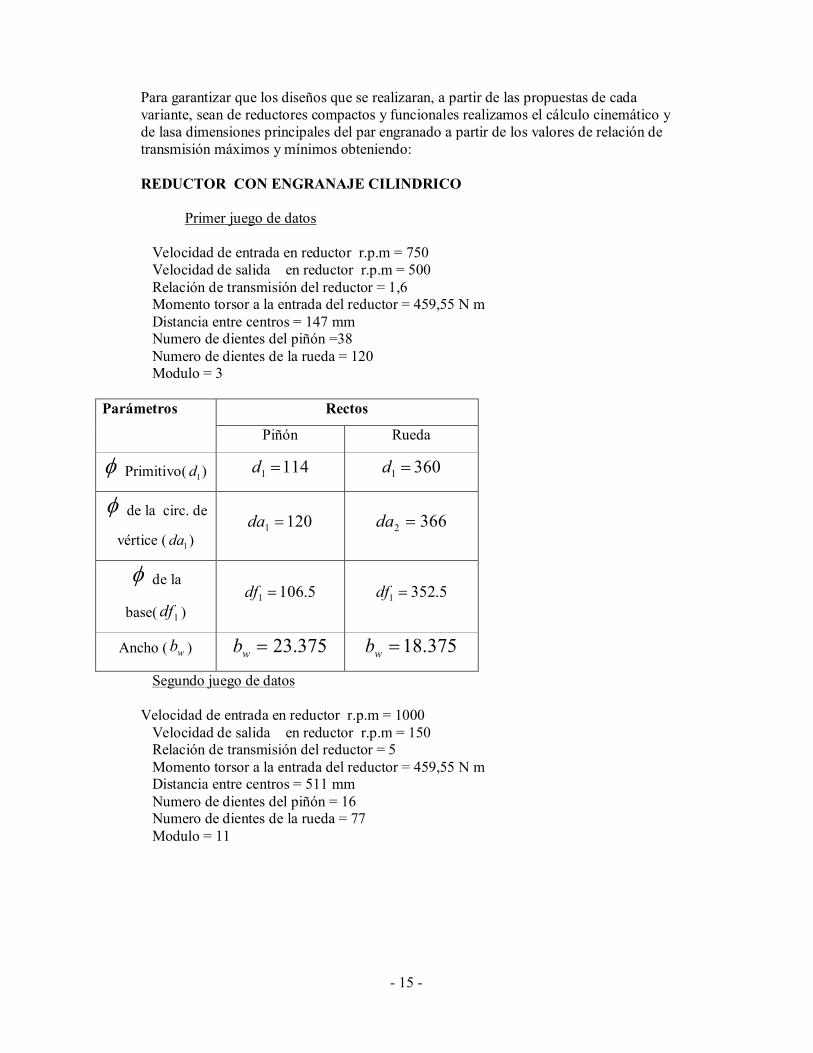
Para garantizar que los diseños que se realizaran, a partir de las propuestas de cada variante, sean de reductores compactos y funcionales realizamos el cálculo cinemático y de lasa dimensiones principales del par engranado a partir de los valores de relación de transmisión máximos y mínimos obteniendo:
REDUCTOR CON ENGRANAJE CILINDRICO
Primer juego de datos
Velocidad de entrada en reductor r.p.m = 750 Velocidad de salida en reductor r.p.m = 500 Relación de transmisión del reductor = 1,6 Momento torsor a la entrada del reductor = 459,55 N m Distancia entre centros = 147 mm Numero de dientes del piñón =38 Numero de dientes de la rueda = 120 Modulo = 3
Rectos Parámetros
Piñón Rueda
φ Primitivo( ) 1 d 114 1 = d 360 1 = d
φ de la circ. de vértice ( 1 da )
120 1 = da 366 2 = da
φ de la base( 1 df )
5 . 106 1 = df 5 . 352 1 = df
Ancho ( w b ) 375 . 23 = w b 375 . 18 = w b
Segundo juego de datos
Velocidad de entrada en reductor r.p.m = 1000 Velocidad de salida en reductor r.p.m = 150 Relación de transmisión del reductor = 5 Momento torsor a la entrada del reductor = 459,55 N m Distancia entre centros = 511 mm Numero de dientes del piñón = 16 Numero de dientes de la rueda = 77 Modulo = 11
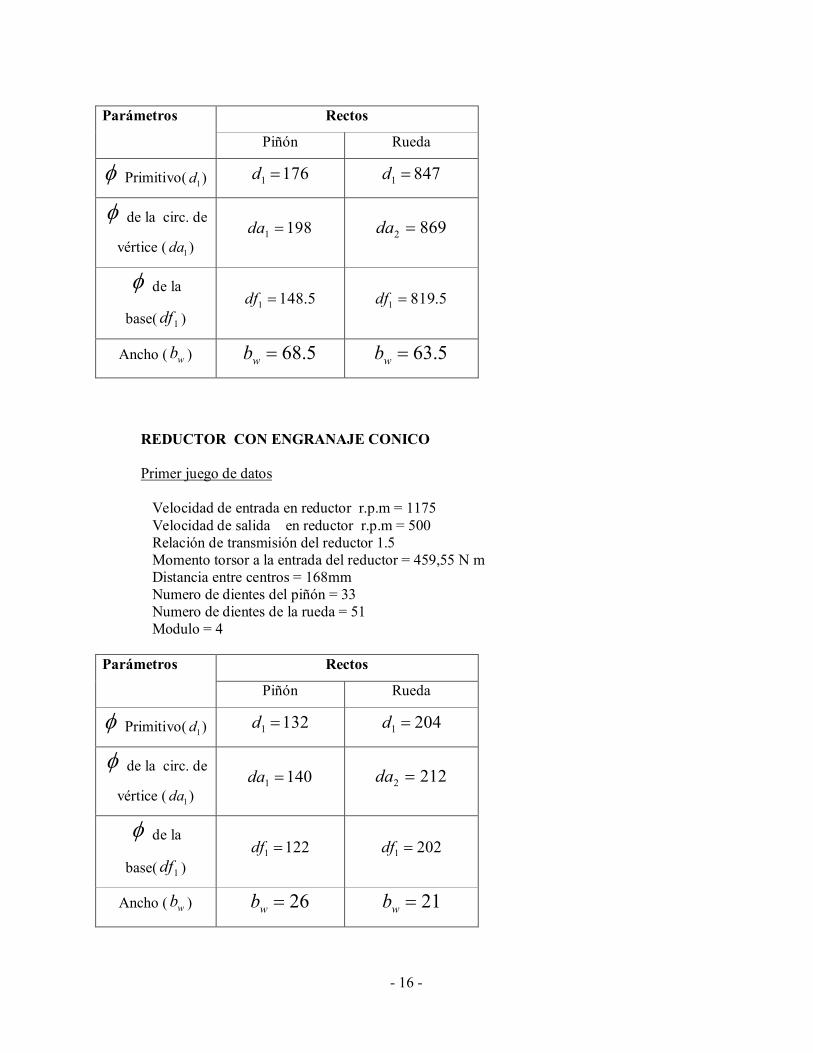
16
Rectos Parámetros
Piñón Rueda
φ Primitivo( ) 1 d 176 1 = d 847 1 = d
φ de la circ. de vértice ( 1 da )
198 1 = da 869 2 = da
φ de la base( 1 df )
5 . 148 1 = df 5 . 819 1 = df
Ancho ( w b ) 5 . 68 = w b 5 . 63 = w b
REDUCTOR CON ENGRANAJE CONICO
Primer juego de datos
Velocidad de entrada en reductor r.p.m = 1175 Velocidad de salida en reductor r.p.m = 500 Relación de transmisión del reductor 1.5 Momento torsor a la entrada del reductor = 459,55 N m Distancia entre centros = 168mm Numero de dientes del piñón = 33 Numero de dientes de la rueda = 51 Modulo = 4
Rectos Parámetros
Piñón Rueda
φ Primitivo( ) 1 d 132 1 = d 204 1 = d
φ de la circ. de vértice ( 1 da )
140 1 = da 212 2 = da
φ de la base( 1 df )
122 1 = df 202 1 = df
Ancho ( w b ) 26 = w b 21 = w b
17
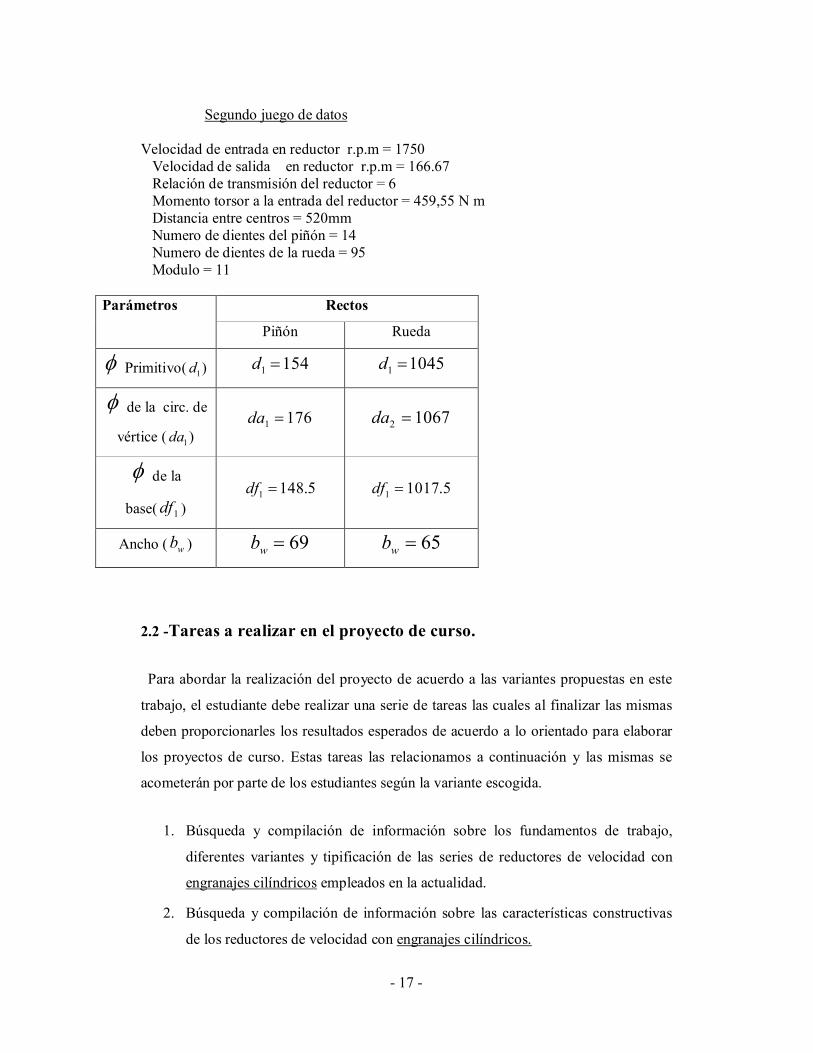
Segundo juego de datos
Velocidad de entrada en reductor r.p.m = 1750 Velocidad de salida en reductor r.p.m = 166.67 Relación de transmisión del reductor = 6 Momento torsor a la entrada del reductor = 459,55 N m Distancia entre centros = 520mm Numero de dientes del piñón = 14 Numero de dientes de la rueda = 95 Modulo = 11
Rectos Parámetros
Piñón Rueda
φ Primitivo( ) 1 d 154 1 = d 1045 1 = d
φ de la circ. de vértice ( 1 da )
176 1 = da 1067 2 = da
φ de la base( 1 df )
5 . 148 1 = df 5 . 1017 1 = df
Ancho ( w b ) 69 = w b 65 = w b
2.2 Tareas a realizar en el proyecto de curso.
Para abordar la realización del proyecto de acuerdo a las variantes propuestas en este
trabajo, el estudiante debe realizar una serie de tareas las cuales al finalizar las mismas
deben proporcionarles los resultados esperados de acuerdo a lo orientado para elaborar
los proyectos de curso. Estas tareas las relacionamos a continuación y las mismas se
acometerán por parte de los estudiantes según la variante escogida.
1. Búsqueda y compilación de información sobre los fundamentos de trabajo,
diferentes variantes y tipificación de las series de reductores de velocidad con
engranajes cilíndricos empleados en la actualidad.
2. Búsqueda y compilación de información sobre las características constructivas
de los reductores de velocidad con engranajes cilíndricos.
18
3. Identificar los criterios principales de la capacidad de trabajo de los elementos
de máquinas en un reductor de velocidad con engranaje cilíndrico de ejes
paralelos y contacto exterior que permitan establecer los criterios de diseño que
deben ser empleados, la elección de los materiales y los procedimientos de
construcción.
4. Identificar los programas de computación especializados, tablas de cálculo en
Excel u otro sistema y bases de datos disponibles para el diseño y selección de
los elementos de maquinas identificados en el objeto de diseño.
5. Realizar el calculo cinemático de la transmisión de acuerdo a la variante.
6. Calcular y determinar las dimensiones de las ruedas dentadas y del engranaje,
estableciendo todas las medidas, orientaciones y recomendaciones para su
construcción.
7. Calcular y determinar las dimensiones principales de los árboles, estableciendo
todas las medidas, orientaciones y recomendaciones para su construcción. En la
comprobación de la capacidad de trabajo de los árboles se considerará el sistema
de carga y velocidad más peligroso con los elementos que se vinculan a los
árboles.
8. Seleccionar los cojinetes y realizar los cálculos de comprobación que garanticen
los requerimientos de la aplicación, estableciendo las principales dimensiones de
los apoyos.
9. Establecer el sistema de lubricación y lubricante de los principales componentes
del sistema diseñado.
10. Realizar los cálculos fundamentales para seleccionar y comprobar la capacidad
de trabajo de transmisiones por correas y poleas (a la entrada del reductor) y por
cadenas y ruedas (a la salida del reductor).
11. Calcular, establecer las dimensiones principales y realizar las comprobaciones
de la capacidad de trabajo de las uniones árbolcubo haciendo uso de las normas
vigentes.
12. Seleccionar los sellos y/o obturadores necesarios y que cumplan con los
requerimientos de la aplicación.
13. Desarrollar al menos un procedimiento matemático de cálculo óptimo de alguno
de los elementos de máquinas presentes en el objeto de diseño.
19
14. Desarrollar al menos dos cálculos de diseño con asistencia de la computación de
algunos de los elementos de máquinas presentes en el objeto de diseño.
15. Realizar comprobación mediante el método de los elementos finitos de uno de
los elementos de máquinas.
16. Realizar una valoración del costo total, considerando los costos por fabricación,
costos por compra y futuro costos de mantenimiento y explotación del conjunto
diseñado.
17. Dibujar plano de ensamble del conjunto (con identificación de los elementos,
medidas generales, ajustes de montajes y otras orientaciones) donde se pueda
apreciar los elementos de máquinas y componentes mecánicos diseñados y la
interrelación entre ellos. ( Ver anexo1 )
18. Dibujar plano de taller de la rueda dentada. ( Ver anexo 2 ,3 y 4 )
19. Dibujar plano de taller del árbol de la rueda.
20. Dibujar plano de la polea acoplada al árbol de entrada.
21. Confeccionar el informe del Proyecto de Curso según las normas establecidas en
el curso de Elementos de Máquinas.
20
Reductores de velocidad
21
CAPITULO III – Reductores de velocidad
3.1 Clasificación de los reductores de velocidad. Los reductores de velocidad como bien lo señala su nombre sirven para reducir la
velocidad. Las industrias requieren de este tipo de equipos para variar las revoluciones
por minuto (r.p.m.), ya que en la mayoría de los procesos, las velocidades de los
motores son muy altas. Con la implementación de los reductores de velocidad se
obtiene un menor número de r.p.m. de salida, pero sin disminuir de manera significativa
la potencia, aumentando el tórque de forma segura y eficiente.
A la hora de diseñar un reductor de velocidad, desde el primer momento se toman
decisiones que deben considerar inicialmente un esquema general de los principales
elementos a acoplar: la cantidad y tipos de ruedas dentadas, la cantidad y configuración
de árboles, la cantidad de cojinetes y el cuerpo (carcasa) para acoger a los elementos
individuales y propiciar las relaciones entre ellos.
Las características del modo de acoplamiento de las ruedas, la ubicación de los
cojinetes de manera tal que ellos garanticen el trabajo de las ruedas y en general la
configuración de la carcasa, también constituyen decisiones de diseño. El proceso de
diseño no puede ser racionalmente ejecutado, mientras decisiones de estos géneros no
son tomadas.
Se denominan reductores a los mecanismos destinados para disminuir la velocidad
angular en los accionamientos, desde el motor hacia la máquina de trabajo y están
compuestos de transmisiones dentadas y/o transmisiones sinfín, instaladas en el cuerpo
(carcasa).
Los reductores se utilizan ampliamente en todas las ramas de la Industria
Contemporánea, de ahí que se pueda encontrar la más variada gama de ellos, acorde a
su esquema cinemática y a sus rasgos constructivos. Los reductores pueden ser de
engranajes cilíndricos, cónicos y sinfín.
El tipo y construcción de un reductor está determinada por el tipo, ubicación y
cantidad de pares para la transmisión (escalones o etapas).
Según el tipo de transmisión, los reductores pueden ser:
22
Ø Cilíndricos.
Ø Cónicos.
Ø Sinfín.
Ø Cónicocilíndricos.
Ø Sinfíncilíndricos, etc.
Por el número de pares:
Ø De una etapa (escalón).
Ø De dos etapas (escalones).
Ø De tres etapas (escalones), etc.
Acorde a la ubicación de los árboles y ruedas dentadas:
Ø Horizontales.
Ø Verticales.
Los reductores de velocidad traen consigo una serie de beneficios, entre los cuales se
destacan:
Una regularidad perfecta tanto en la velocidad como en la potencia transmitida.
Una mayor eficiencia en la transmisión de la potencia suministrada por el motor.
Mayor seguridad en la transmisión, reduciendo los costos en el mantenimiento.
Menor espacio requerido y mayor rigidez en el montaje.
Menor tiempo requerido para su instalación
3.2Clasificación por tipo de engranajes Los reductores se pueden clasificar por la tipología de sus engranajes, las
clasificaciones más usuales son: Engranajes, Sin finCorona y planetarios.
3.2.1 Reductores de ruedas dentadas. Los reductores de ruedas dentadas cilíndricas, gracias al amplio diapasón de potencia
que pueden transmitir, a su longevidad, facilidad de fabricación y mantenimiento, tienen
una gran difusión industrial.
Los reductores de ruedas dentadas cónicas, como es sabido se emplean para la
transmisión entre árboles cuyos ejes se intersecan, generalmente a 90 0 ; en estos
reductores, por regla general, los apoyos del piñón son ubicados en forma de consola,
por lo que como consecuencia de su menor rigidez, se incrementa la irregularidad de la
distribución de la carga a lo largo del diente y es precisamente esa la razón de que las
ruedas trabajen con alto ruido. Además, los cojinetes de este tipo de reductor no se fijan
directamente en la carcasa, sino se sitúan en casquillos en forma de copas y un juego de
23
calzos metálicos que permiten la regulación axial de la transmisión durante el ensamble.
Los procesos de fabricación y mantenimiento de estos reductores resultan más
dificultosos que los de engranajes cilíndricos. .
Cuando i ≤ 6,3 se emplean reductores de una sola etapa; si 6,3 < i ≤ 40: de dos
etapas y si i > 40: de tres etapas.
3.2.2 Reductores sinfín. Los reductores sinfín de una etapa son los de mayor difusión y se fabrican con i=
8… 80; en el caso de que u sea superior, se emplean los reductores combinados sinfín
cilíndricos y los sinfín en dos etapas. El tornillo sinfín en el reductor comúnmente puede
ubicarse por debajo o por encima de la rueda, pues la ubicación lateral complica la
lubricación del árbol vertical.
Un engranaje sinfín está formado por un tornillo sinfín y una rueda helicoidal. Este
engranaje une ejes que no son paralelos y que no se cruzan, por lo común formando
ángulo recto. El tornillo sinfín se puede ver como una rueda helicoidal con un ángulo de
hélice tan grande que un solo diente se enrolla de manera continua sobre su
circunferencia. El tornillo sinfín se parece a la rosca de un tornillo común, y la rueda es
como su tuerca. La distancia que un punto sobre la tuerca se mueve axialmente en una
revolución del tornillo se conoce como avance.
3.2.3 Reductores de velocidad Planetarios. Son reductores de engranajes con la particularidad de que no están compuestos de
pares de engranajes si no de una disposición algo distinta: Sobre un cuerpocorona
oscilan un grupo indeterminado de engranajes iguales accionados por un engranaje
central llamado solar. Esta especial configuración y según la construcción de los
engranajes les da dos posibles particularidades. La primera que la relación de
transmisión puede ser exacta, sin decimales, lo que los hace aptos para trabajos de
precisión. La segunda es que al tener más puntos de contacto entre engranajes en cada
juego de reducción pueden transmitir más potencia. En contrapartida tienen serios
problemas de calentamiento.
24
3.2.4 TIPOS DE REDUCTORES DE VELOCIDAD POR ENGRANAJES. El reductor de velocidad es un elemento de transmisión mecánica, generalmente
ubicado entre un motor eléctrico con una velocidad de rotación relativamente alta (con
parámetros ampliamente normalizados) y una máquina movida cuyas características, y
en particular la velocidad, varía según el tipo de industria y la aplicación. Existen
reductores de velocidad muy diferentes unos de otros, no solo en su relación de
transmisión, sino también en sus capacidades de carga, en la disposición de sus árboles
de salida y entrada, y en la forma del montaje. Obviamente, la gran diversidad de
aplicaciones en la práctica requiere un igual número de diferentes tipos de reductores
para garantizar las exigencias industriales el mencionado caso se emplean dos
reductores con relaciones de transmisión, capacidades y montajes diferentes para lograr
una transmisión del movimiento, con transformación del momento torsor, desde un
motor eléctrico trifásico al tambor motor de un elevador de cangilones.
Considerando los tipos de reductores de velocidad más difundidos ha sido realizada una
clasificación de ellos atendiendo a la disposición de los árboles de entrada y salida en el
espacio.
3.3 CLASIFICACIÓN DE LOS REDUCTORES DE VELOCIDAD. 1. Reductores con los ejes de los extremos de árboles paralelos.
2. Reductores con los ejes de los extremos de árboles perpendiculares.
3. Reductores con los ejes de los extremos de árboles cruzados.
4. Reductores con los ejes de los extremos de árboles coaxiales.
3.3.1 Reductores con los ejes de los extremos de árboles paralelos.
Los reductores de velocidad con los ejes de extremos de árboles paralelos más generales
pueden ser clasificados atendiendo al tipo de engranaje que conforma su parte
cinemática en:
• Reductores con un engranaje de ruedas cilíndricas.
25
• Reductores con varios engranajes de ruedas cilíndricas con los ejes alineados
(conocidos como reductores tándem).
• Reductores con varios engranajes de ruedas cilíndricas con los ejes no alineados
(algunos tipos se reconocen como pendulares).
• Reductores con engranajes planetarios.
3.3.2 Reductores de Ejes Perpendiculares. Los reductores de velocidad con los ejes de extremos de árboles perpendiculares más
generales pueden ser clasificados atendiendo al tipo de engranaje que conforma su parte
cinemática en:
• Reductores con un engranaje de ruedas cónicas (conocidos como reenvíos).
• Reductores con un engranaje inicial de ruedas cónicas y con otras etapas de
engranajes de ruedas cilíndricas (conocidos como tándem cónico).
3.3.3 Reductores de Ejes Cruzados. Generalmente, los reductores de velocidad con los ejes de extremos de árboles cruzados
pueden ser clasificados atendiendo al tipo de engranaje que conforma su parte
cinemática en:
• Reductores con un engranaje de tornillo sinfín.
• Reductores con varios engranajes de tornillo sinfín.
• Reductores con un engranaje de ruedas cilíndricas y otro engranaje de tornillo sinfín.
• Reductores con un engranaje de ruedas cónicas intermedio entre engranajes de
ruedas cilíndricas (conocidos como reductores ortogonales).
26
Metodologías y Cálculo para diseñar un
reductor de velocidad.
27
CAPITULO IV Metodologías y Cálculo para diseñar un reductor de
velocidad.
4.1 Introducción A la hora de diseñar un reductor de velocidad, desde el primer momento se toman
decisiones que deben considerar inicialmente un esquema general de los principales
elementos a acoplar: la cantidad y tipos de ruedas dentadas, la cantidad y configuración
de árboles, la cantidad de cojinetes y el cuerpo (carcasa) para acoger a los elementos
individuales y propiciar las relaciones entre ellos. Las características del modo de
acoplamiento de las ruedas, la ubicación de los cojinetes de manera tal que ellos
garanticen el trabajo de las ruedas y en general la configuración de la carcasa, también
constituyen decisiones de diseño. El proceso de diseño no puede ser racionalmente
ejecutado, mientras decisiones de estos géneros no son tomadas.
El proceso de diseño abordado aquí implica que el mismo puede desarrollarse en la
siguiente secuencia: de los engranajes a los árboles, de éstos a los cojinetes, a las
chavetas y acoplamientos y finalmente a la carcasa. Es normal que el diseñador tenga
que regresar atrás muchas veces para ajustar el diseño de determinados
componentes afectados por los cambios introducidos a otros componentes; este
proceso se denomina iteración y continúa hasta que se alcanza un diseño totalmente
aceptable. Frecuentemente durante la iteración se desarrollan y someten a pruebas
algunos prototipos.
28
Cuando se proyecta un reductor de velocidades de dos escalones o etapas, debe ser
distribuido el valor de la relación de transmisión total del reductor entre los dos
escalones o etapas, para garantizar uniformidad a la hora de proyectar la distancia entre
centros. Esta distribución se hará según la siguiente recomendación:
( ) Tred e i i ⋅ ÷ = 25 . 1 2 . 1 1 Para el Escalón de Entrada del Reductor.
1 2
e
Tred e i
i i = Para el Escalón de Salida del Reductor.
Tred i Relación de Transmisión total del Reductor.
4.2 Calculo cinemático.
El procedimiento de trasmitir el movimiento por rozamiento o por engrane determina la
forma de las superficies de trabajo y al mismo tiempo las propiedades características de
las transmisiones.
Así vemos que en las transmisiones por rozamiento, las secciones de las superficies
útiles, normales al eje de rotación, representan circunferencias. En las transmisiones por
engrane con contacto directo, las piezas se dotan de dientes, los cuales realizan la
transmisión del par de torsión de la rueda motriz a la movida y permiten asegurar una
conservación exacta de la relación de transmisión cinemática con una aceptable
capacidad de carga.
En los anteriores tipos de transmisión mecánica, donde el carácter del movimiento a la
entrada y a la salida es de rotación, se emplea la razón de transmisión cinemática, como
parámetro para cuantificar las transformaciones de las velocidades angulares.
Donde:
u1, 2 = Razón de transmisión cinemática desde la entrada (1) hasta la salida (2).
ω1 = Velocidad angular del elemento motor.
ω2 = Velocidad angular del elemento movido.
n1 = Frecuencia de rotación del elemento motor.
n2 = Frecuencia de rotación del elemento movido.
29
Tomando en consideración el valor de la razón de transmisión cinemática, o razón de
engrane como también se conoce en las transmisiones dentadas, pueden ser definidas las
transmisiones como:
u1, 2 > 1; transmisión reductora
u1, 2 < 1; transmisión multiplicadora
Ha sido una práctica ampliamente difundida, en presencia de una transmisión de varias
etapas, emplear el término relación de transmisión cinemática i, definido de forma
análoga a la razón de transmisión, pero teniendo en cuenta la relación entre la velocidad
a la entrada de la primera etapa y la velocidad a la salida de la última etapa.
Las transmisiones por engrane, a pesar de garantizar una razón de transmisión exacta en el ciclo de trabajo, no permiten una transmisión del movimiento continua y suave, debido al contacto por engrane.
4.3 Metodología y Cálculo de los Engranajes. Este punto debe abarcar el procedimiento completo de diseño de cada uno de los
engranes, tomando en consideración las recomendaciones actuales, calculando los
diferentes esfuerzos que actúan sobre los engranes dimensionar los mismos y escoger
los Materiales y tratamientos Térmicos adecuados para satisfacer los criterios de diseño.
En el engranaje la transmisión del momento de rotación del árbol conductor al
conducido se produce gracias a la presión de los dientes de piñón sobre los de rueda.
Para conservar la constancia de la relación de transmisión los dientes del piñón y la
rueda beben tener los perfiles conjugados.
4.3.1 Cálculo de Proyección de Engranajes Cilíndricos.
En el caso de los pares dentados debe especificarse, en cada rueda, el módulo, el
diámetro primitivo, su ancho, el material y su tratamiento térmico. Estas
especificaciones dependen de los requerimientos de resistencia y desgaste de los dientes
de las ruedas y de los requerimientos cinemáticos. Se debe lograr que los engranajes
sean montados sobre los árboles de manera tal que se asegure la ubicación apropiada de
30
las ruedas, la adecuada capacidad de transmisión del torque desde los engranajes a los
árboles (a través de chavetas, estrías, etc.) y alta fiabilidad en el diseño de los árboles.
Pasos para el cálculo y comprobación
1. Elección de material y tratamiento térmico del par dentado
Ver tabla (4, 4.1y 4.2)
Dureza ( 350 ≤ H HB), cuando se desea excluir la influencia del tratamiento
térmico en la exactitud del engranaje, de tal forma que puedan ser elaborados los dientes
después del tratamiento térmico, (TT – Normalizado o Mejorado).
Para este caso la dureza del piñón debe ser mayor que la de la rueda siendo
que la diferencia entre estas durezas debe estar entre 40 y 50 HB para evitar
el “Agarramiento”, o sea:
( ) 50 40 ÷ = − rued piñ HB HB HB.
Dureza ( 350 > H HB), cuando se desea aumentar la capacidad de carga
considerablemente y disminuir las dimensiones. En este caso los dientes se elaboran
antes de dar tratamiento térmico, (TT – Temple Volumétrico y Superficial,
Cementación, Nitruración, etc.)
Otras Recomendaciones:
Para ruedas y piñones sometidos a altas cargas y cuando se requieren dimensiones
pequeñas se recomienda: TT – Temple Volumétrico o Superficial.
Para transmisiones de dimensiones medias y que se utilicen en un tiempo
prolongado de trabajo se recomienda: TT – Mejorado
Transmisiones con frecuentes arrancadas y paradas, sometidas a cargas de
impacto, sobrecargas se recomienda: TT – Cementación.
Para mayor dureza se recomienda: TT – Nitruración ó Cianuración.
Tabla 4 Selección de Materiales y Tratamientos Térmicos para los Piñones de una Transmisión
Propiedades Mecánicas Anchura de la Dureza L i m
i t L i m
i t
31
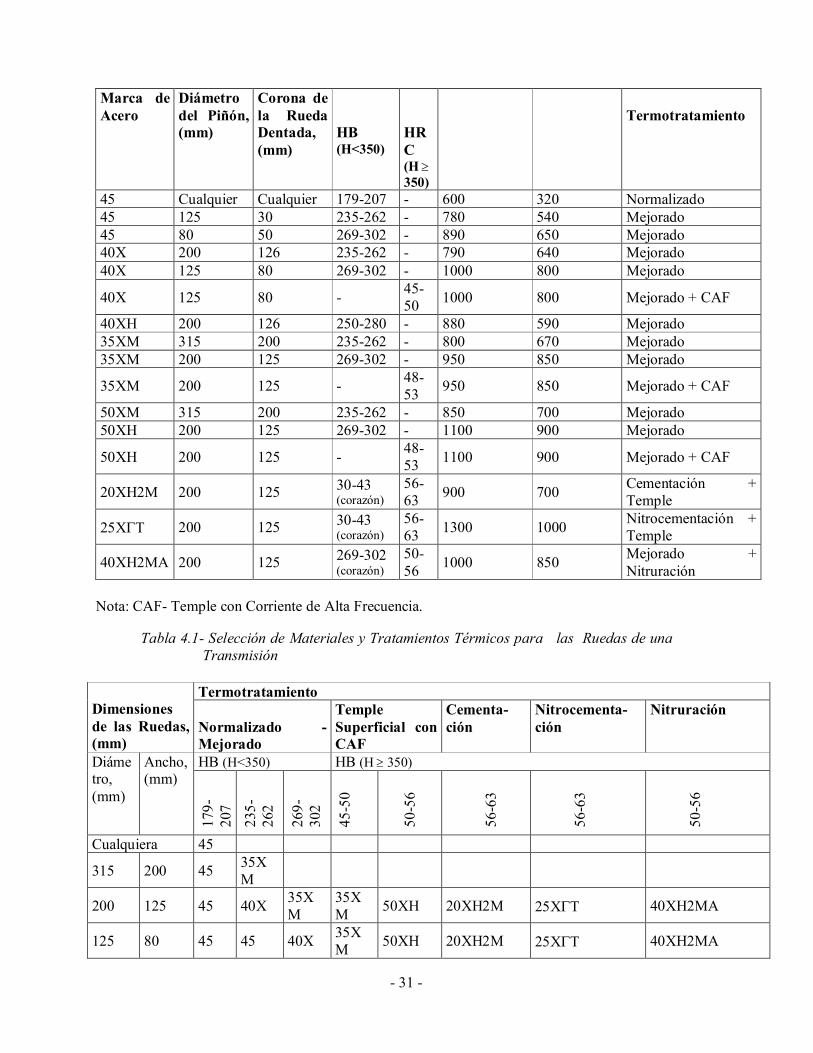
Marca de Acero
Diámetro del Piñón, (mm)
Corona de la Rueda Dentada, (mm)
HB (H<350)
HR C (H ≥ 350)
Termotratamiento
45 Cualquier Cualquier 179207 600 320 Normalizado 45 125 30 235262 780 540 Mejorado 45 80 50 269302 890 650 Mejorado 40X 200 126 235262 790 640 Mejorado 40X 125 80 269302 1000 800 Mejorado
40X 125 80 45 50 1000 800 Mejorado + CAF
40XH 200 126 250280 880 590 Mejorado 35XM 315 200 235262 800 670 Mejorado 35XM 200 125 269302 950 850 Mejorado
35XM 200 125 48 53 950 850 Mejorado + CAF
50XM 315 200 235262 850 700 Mejorado 50XH 200 125 269302 1100 900 Mejorado
50XH 200 125 48 53 1100 900 Mejorado + CAF
20XH2M 200 125 3043 (corazón)
56 63 900 700 Cementación +
Temple
25XΓT 200 125 3043 (corazón)
56 63 1300 1000 Nitrocementación +
Temple
40XH2MA 200 125 269302 (corazón)
50 56 1000 850 Mejorado +
Nitruración
Nota: CAF Temple con Corriente de Alta Frecuencia.
Tabla 4.1 Selección de Materiales y Tratamientos Térmicos para las Ruedas de una Transmisión
Termotratamiento Dimensiones de las Ruedas, (mm)
Normalizado Mejorado
Temple Superficial con CAF
Cementa ción
Nitrocementa ción
Nitruración
HB (H<350) HB (H ≥ 350) Diáme tro, (mm)
Ancho, (mm)
179
207
235
262
269
302
4550
5056
5663
5663
5056
Cualquiera 45
315 200 45 35X M
200 125 45 40X 35X M
35X M 50XH 20XH2M 25XΓT 40XH2MA
125 80 45 45 40X 35X M 50XH 20XH2M 25XΓT 40XH2MA
32
80 50 45 45 45 35X M 50XH 20XH2M 25XΓT 40XH2MA
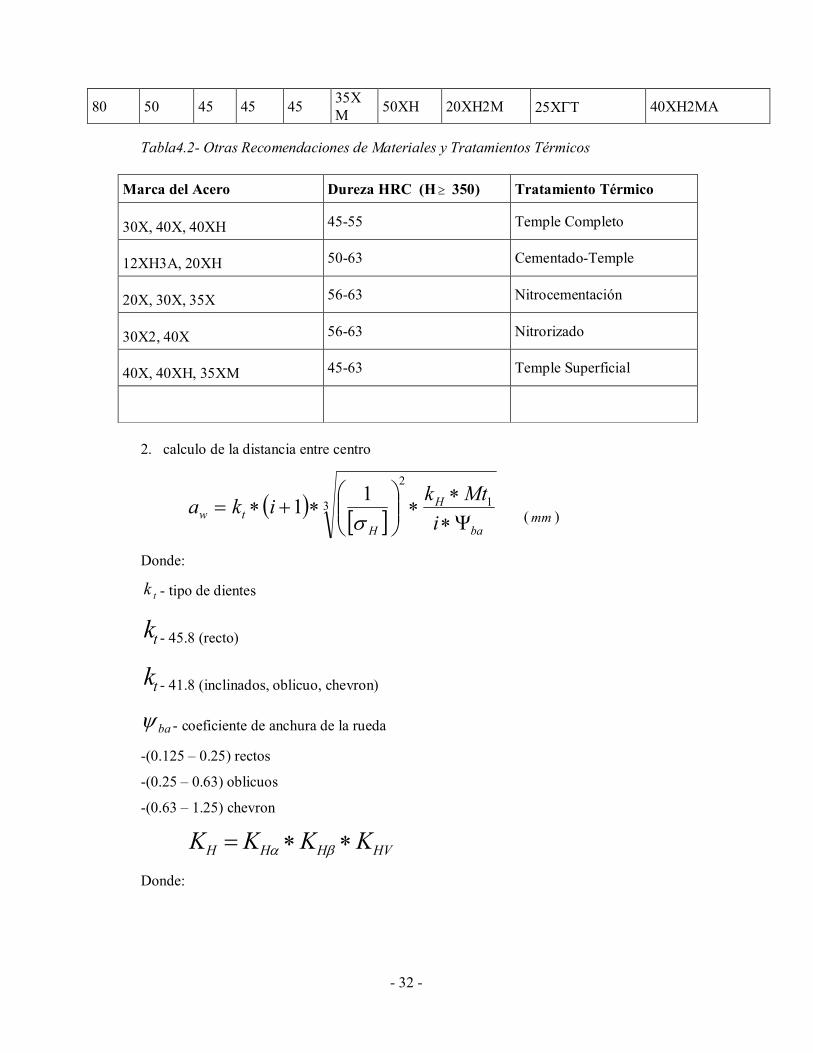
Tabla4.2 Otras Recomendaciones de Materiales y Tratamientos Térmicos
Marca del Acero Dureza HRC (H≥ 350) Tratamiento Térmico
30X, 40X, 40XH 4555 Temple Completo
12XH3A, 20XH 5063 CementadoTemple
20X, 30X, 35X 5663 Nitrocementación
30X2, 40X 5663 Nitrorizado
40X, 40XH, 35XM 4563 Temple Superficial
2. calculo de la distancia entre centro
( ) [ ] 3 1
2 1 1
ba
H
H t w i
Mt k i k a Ψ ∗ ∗
∗
∗ + ∗ =
σ (mm )
Donde:
t k tipo de dientes
t k 45.8 (recto)
t k 41.8 (inclinados, oblicuo, chevron)
ba ψ coeficiente de anchura de la rueda
(0.125 – 0.25) rectos
(0.25 – 0.63) oblicuos
(0.63 – 1.25) chevron
HV H H H K K K K ∗ ∗ = β α
Donde:

33
α H K coeficiente que tiene en cuenta la irregularidad de la distribución de la carga
entre dientes 1 = α H K (rectos), = α H K (1.05 – 1.15) inclinados
o Chevrón
HV K coeficiente que tiene en cuenta la carga dinámica
= HV K (1.05 – 1) rectos, = HV K (1 – 1.2) inclinados
β H K coeficiente que tiene en cuenta la irregularidad de la distribución en el ancho de la corona
de la rueda
[ ] H σ tensión admisible a contacto
[ ] [ ] V r H
b H H Z Z
S ∗ ∗ = lim σ σ (Mpa)
b H lim σ limite de fatiga.
[ ] H S coeficiente de seguridad admisible.
r Z coeficiente que tiene en cuenta la rugosidad de la superficie = r Z (0.1 – 1)
V Z coeficiente que depende de la velocidad = V Z (1 – 1.1)
Determinar β H K
β H K 350 B H H ≤ H < 350 B H
Simetría 1 – 1.15 1.1 – 1.25 Asimétrica 1.1 – 1.25 1.2 – 1.35 Fuera de los apoyos 1.2 – 1.35 1.3 – 1.85
3. Calculo del modulo de engranaje
w a m ∗ − = ) 02 . 0 01 . 0 ( (mm )
Se normaliza el modulo:
1 1.5 2.5 4 6 10 16 25 40 1.125 1.75 2.75 4.5 7 11 18 28 45 1.250 2 3 5 8 12 20 32 1.375 2.25 3.5 5.5 9 14 22 36
4.determinar el numero resultante de dientes

34
m a Z w
E
∗ = 2 (Rectos)
β cos 2 ∗
∗ =
m a Z w
E (Inclinados)
Donde:
Oblicuos ( 0 0 20 8 − ) se recomienda ( ) 10 0
Chevron ( ) 40 25 0 0 − se recomienda ( ) 25 0
β Angulo de inclinación del diente
5. Determinar el número de dientes del piñón y de la rueda
1 1 + = i Z
Z E
1 2 Z Z Z E − =
6. Precisión de la distancia interracial
m Z Z a w ∗ + ∗ = ) ( 5 . 0 2 1 (Rectos)
m Z Z a w ∗ +
= β cos 2 2 1
(Inclinados)
7.Determinación de los parámetros principales de la rueda
Rectos Inclinados Parámetros
Piñón Rueda Piñón Rueda
φ primitivo( ) 1 d
1 1 z m d ∗ = 2 2 z m d ∗ = 1 1 cos z m d ∗ =
β 2 2 cos z m d ∗ =
β
φ de la circ. de vértice
( 1 da )
m d da ∗ + = 2 1 1 m d da ∗ + = 2 2 2 m d da ∗ + = 2 1 1 m d da ∗ + = 2 2 2
φ de la
base( 1 df )
m d df ∗ − = 5 . 2 1 1 m d df ∗ − = 5 . 2 2 2 m d df ∗ − = 5 . 2 1 1 m d df ∗ − = 5 . 2 2 2
ancho ( w b ) 5 + = w w b b a b ba w ∗ Ψ = 2 5 + = w w b b a b ba w ∗ Ψ = 2

35
8. Calculo de la velocidad circunferencial del par dentado
4 1 1
10 6∗ ∗ ∗
= n d V π (m/s)
Donde:
1 d diámetro primitivo de la rueda (mm )
1 n revoluciones a la entrada (rpm)
9. Comprobación a flexión
β σ Y Y Y b m d K Mt
E f w
f f ∗ ∗ ∗
∗ ∗
∗ =
2 1
1 2
[ ] f f σ σ ≤
Donde:
H f K K =
1 = E Y
β Y coeficiente de la forma inclinada del diente
1 = β Y (Rectos)
140 1 β
β = Y (Inclinados)
f Y coeficiente de forma del diente.
1 z 17 18 19 20 21 22 24 25 26 27 28 29
f Y 4.26 4.2 4.11 4.08 4.01 4 3.92 3.9 3.88 3.86 3.84 3.82
1 z 30 32 37 40 45 50 60 80 Mayor que
80
f Y 3.8 3.78 3.71 3.7 3.68 3.65 3.62 3.61 3.6
[ ] [ ] xf r s fp fc f
b f f K Y Y K K
s ∗ ∗ ∗ ∗ ∗ = lim
0 σ σ

36
Donde:
fc K coeficiente que considera el sentido de aplicación de la carga unilateral o bilateral
<HB 350 7 . 0 = fc K
≥ HB350 8 . 0 = fc K
fp K coeficiente de longevidad
HB ≤ 350 fp K =2
HB>350 fp K =1.6
S Y coeficiente que considera la sensibilidad del material a la concentración de tensiones.
r Y coeficiente que depende de la rugosidad de la superficie del diente
xf K coeficiente que depende de las dimensiones de la rueda
8500 30
1 2 ∗ − = d
K xf
300 2 ≤ d xf K =1
200 2 ≥ d xf K =0.2
[ ] f s coeficiente de seguridad a flexión
[ ] [ ] [ ] 11 1 f f f s s s ∗ =
[ ] 1 f s = (1.55 – 2.3)
[ ] = 11 f s (1 – 1.3)

37
Cálculo de Comprobación de Engranajes Cilíndricos Cerrados (caso
de los reductores de velocidad)
Ecuación de Comprobación a la Flexión
a) Para Engranajes de Dientes Rectos
[ ] F n
F FV F F F b m d
K K K Mt Y σ σ α β ≤
∗ ∗
∗ ∗ ∗ ∗ ∗ =
1 1
1 1 1
2
b) Para Engranajes de Dientes Inclinados
[ ] F n
F FV F F F b m d
K K K Mt Y Y σ σ α β
β ≤ ∗
∗ ∗ ∗ ∗ ∗ = ⋅
1 1
1 1 1
2
ο
Donde:
1 t M – Torque a la entrada de la transmisión. (N mm)
α β F FV F K K K , , Seleccionados en las tablas 4.3, 4.4, 4.5
[ ] F σ Tensión Permisible a la Flexión. (MPa)
1 d – Diámetro primitivo del engrane piñón.
1 b – Ancho del engrane piñón.
n m – Módulo normal de la transmisión.
1 F Y – Coeficiente de forma del diente (tabla 4.6)
β Y Coeficiente que tiene en cuenta la inclinación de los dientes.
Para dientes rectos 1 = β Y
Para dientes inclinados se determina según la expresión.
140 1 β
β − = Y Siendo β el ángulo de inclinación de los dientes.
Selección de Coeficientes para el Cálculo de Flexión.
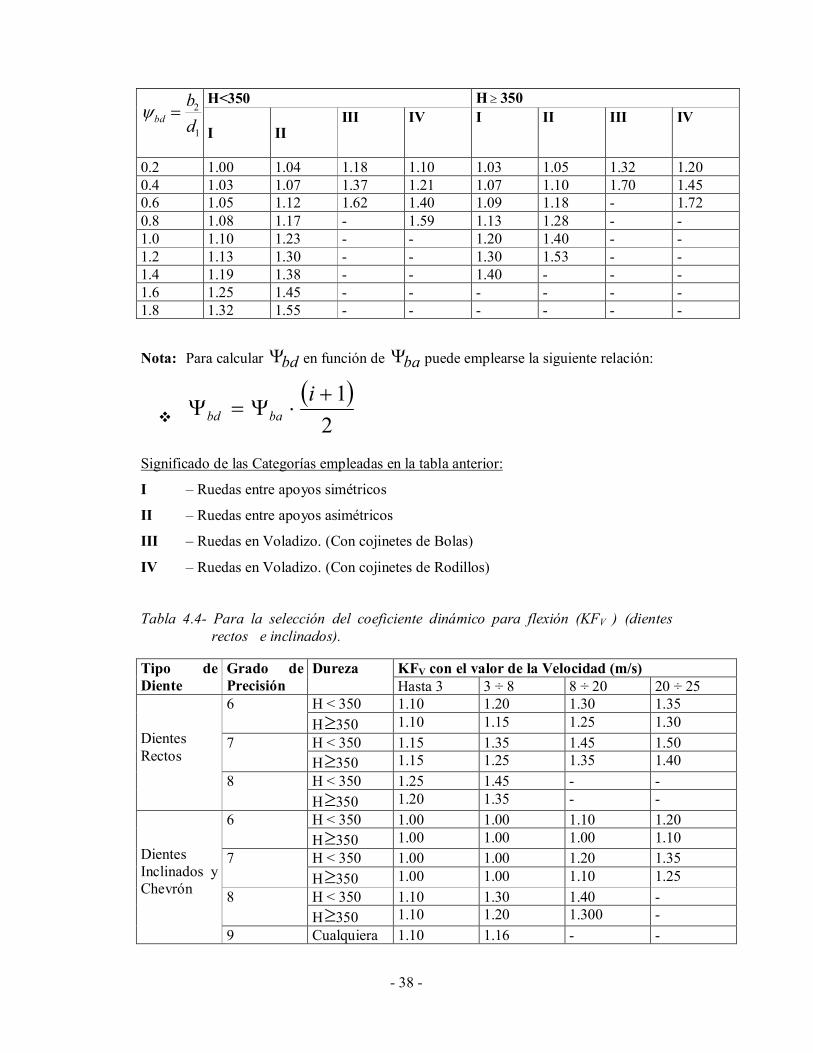
Tabla 4.3 Valores para seleccionar el coeficiente de concentración de carga para flexión (KFβ ) (dientes rectos e inclinados).
H<350 H ≥ 350
38
H<350 H ≥ 350
1
2
d b
bd = ψ I II
III IV I II III IV
0.2 1.00 1.04 1.18 1.10 1.03 1.05 1.32 1.20 0.4 1.03 1.07 1.37 1.21 1.07 1.10 1.70 1.45 0.6 1.05 1.12 1.62 1.40 1.09 1.18 1.72 0.8 1.08 1.17 1.59 1.13 1.28 1.0 1.10 1.23 1.20 1.40 1.2 1.13 1.30 1.30 1.53 1.4 1.19 1.38 1.40 1.6 1.25 1.45 1.8 1.32 1.55
Nota: Para calcular bd Ψ en función de ba Ψ puede emplearse la siguiente relación:
v ( ) 2 1 +
⋅ Ψ = Ψ i ba bd
Significado de las Categorías empleadas en la tabla anterior:
I – Ruedas entre apoyos simétricos
II – Ruedas entre apoyos asimétricos
III – Ruedas en Voladizo. (Con cojinetes de Bolas)
IV – Ruedas en Voladizo. (Con cojinetes de Rodillos)
Tabla 4.4 Para la selección del coeficiente dinámico para flexión (KFV ) (dientes rectos e inclinados).
KFV con el valor de la Velocidad (m/s) Tipo de Diente
Grado de Precisión
Dureza Hasta 3 3 ÷ 8 8 ÷ 20 20 ÷ 25
H < 350 1.10 1.20 1.30 1.35 6 H≥350 1.10 1.15 1.25 1.30 H < 350 1.15 1.35 1.45 1.50 7 H≥350 1.15 1.25 1.35 1.40 H < 350 1.25 1.45
Dientes Rectos
8 H≥350 1.20 1.35 H < 350 1.00 1.00 1.10 1.20 6 H≥350 1.00 1.00 1.00 1.10 H < 350 1.00 1.00 1.20 1.35 7 H≥350 1.00 1.00 1.10 1.25 H < 350 1.10 1.30 1.40 8 H≥350 1.10 1.20 1.300
Dientes Inclinados y Chevrón
9 Cualquiera 1.10 1.16
39
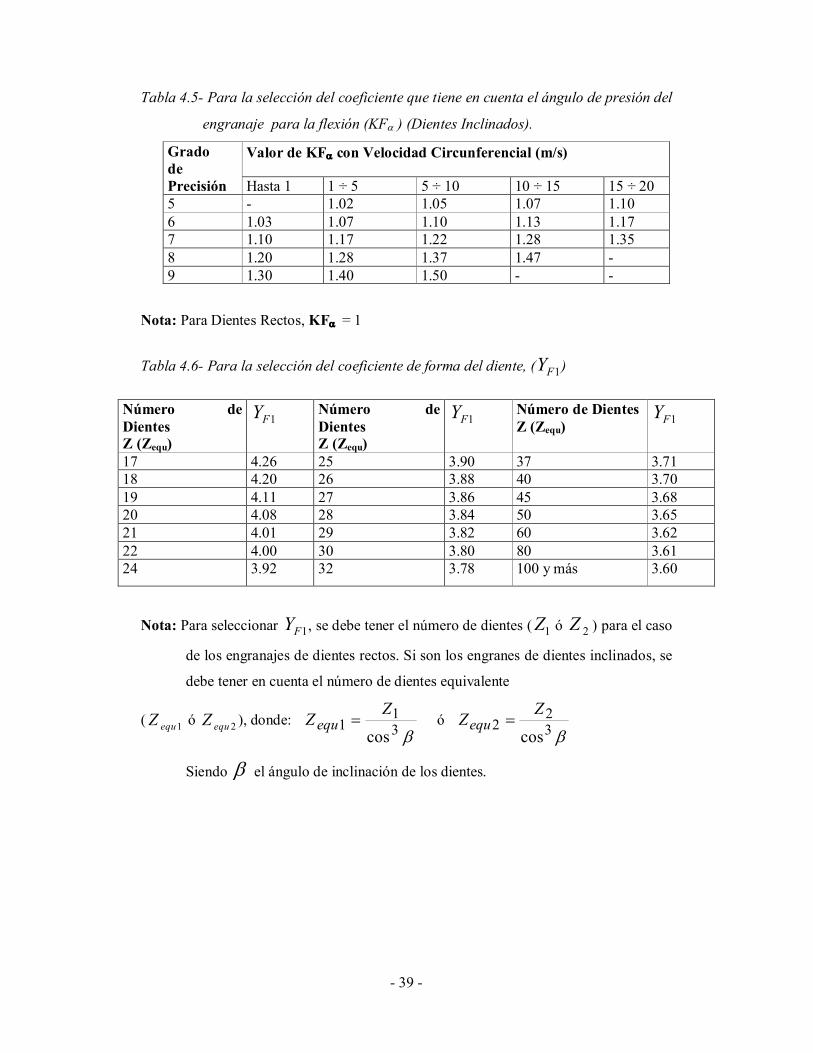
Tabla 4.5 Para la selección del coeficiente que tiene en cuenta el ángulo de presión del
engranaje para la flexión (KFα ) (Dientes Inclinados).
Valor de KFα con Velocidad Circunferencial (m/s) Grado dePrecisión Hasta 1 1 ÷ 5 5 ÷ 10 10 ÷ 15 15 ÷ 20 5 1.02 1.05 1.07 1.10 6 1.03 1.07 1.10 1.13 1.17 7 1.10 1.17 1.22 1.28 1.35 8 1.20 1.28 1.37 1.47 9 1.30 1.40 1.50
Nota: Para Dientes Rectos, KFα = 1
Tabla 4.6 Para la selección del coeficiente de forma del diente, ( 1 F Y )
Número de Dientes Z (Zequ)
1 F Y Número de Dientes Z (Zequ)
1 F Y Número de Dientes Z (Zequ)
1 F Y
17 4.26 25 3.90 37 3.71 18 4.20 26 3.88 40 3.70 19 4.11 27 3.86 45 3.68 20 4.08 28 3.84 50 3.65 21 4.01 29 3.82 60 3.62 22 4.00 30 3.80 80 3.61 24 3.92 32 3.78 100 y más 3.60
Nota: Para seleccionar 1 F Y , se debe tener el número de dientes ( 1 Z ó 2 Z ) para el caso de los engranajes de dientes rectos. Si son los engranes de dientes inclinados, se
debe tener en cuenta el número de dientes equivalente
( 1 equ Z ó 2 equ Z ), donde: β 3
1 1
cos Z Z equ = ó
β 3 2
2 cos Z Z equ =
Siendo β el ángulo de inclinación de los dientes.

40
Cálculo del coeficiente que tiene en cuenta la inclinación de los dientes, ( β Y )
140 1 β
β − = Y
Determinación de la Tensión Permisible a la Flexión
[ ] [ ] XF R S F
F F K Y Y
S ∗ ∗ ∗ = lim σ σ Tensión Permisible a la Flexión
Ver tabla 4.7
Donde:
FP FC FD FG F o
F K K K K ∗ ∗ ∗ ∗ = lim lim σ σ Coeficientes de curvatura del diente
1 = = FD FG K K Para corrección X = 0
Coeficiente del sentido de aplicación de la carga
1 = FC K Para carga unilateral
7 . 0 = FC K Para carga bilateral y H < 350
8 . 0 = FC K Para carga bilateral y H ≥ 350 Coeficiente Longevidad a la Flexión
Se determina de forma similar que para el contacto
m
FE
Fo FP N
N K = Si Fo FE N N > , se toma 1 = FP K
Solo que para este caso:
E FE NH N = 6 10 4× = Fo N
m = 6, si H < 350
m = 9, si H≥350
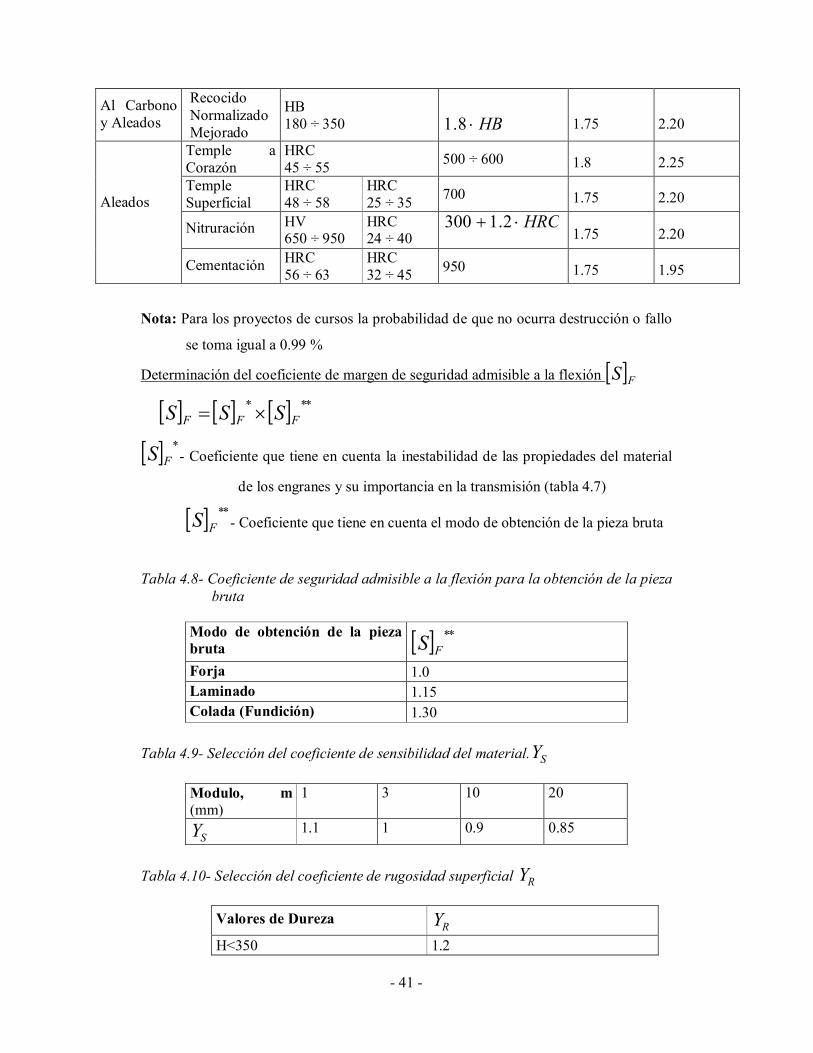
Tabla 4.7 Selección del límite de fatiga para el ciclo Flim o σ
Dureza de los Dientes Valor de [ ] * F S con % de probabilidad de no fallo
Tipo de Acero
Tratamiento Térmico
En la Superficie
En el Núcleo
Flim o σ
(N/mm 2 ) 0.99 % Más del
0.99 %
41
Al Carbono y Aleados
Recocido Normalizado Mejorado
HB 180 ÷ 350 HB ⋅ 8 . 1 1.75 2.20
Temple a Corazón
HRC 45 ÷ 55 500 ÷ 600 1.8 2.25
Temple Superficial
HRC 48 ÷ 58
HRC 25 ÷ 35 700 1.75 2.20
Nitruración HV 650 ÷ 950
HRC 24 ÷ 40
HRC ⋅ + 2 . 1 300 1.75 2.20
Aleados
Cementación HRC 56 ÷ 63
HRC 32 ÷ 45 950 1.75 1.95
Nota: Para los proyectos de cursos la probabilidad de que no ocurra destrucción o fallo
se toma igual a 0.99 %
Determinación del coeficiente de margen de seguridad admisible a la flexión [ ] F S
[ ] [ ] [ ] * * * F F F S S S × =
[ ] * F S Coeficiente que tiene en cuenta la inestabilidad de las propiedades del material
de los engranes y su importancia en la transmisión (tabla 4.7)
[ ] * * F S Coeficiente que tiene en cuenta el modo de obtención de la pieza bruta
Tabla 4.8 Coeficiente de seguridad admisible a la flexión para la obtención de la pieza bruta
Modo de obtención de la pieza bruta [ ] * *
F S Forja 1.0 Laminado 1.15 Colada (Fundición) 1.30
Tabla 4.9 Selección del coeficiente de sensibilidad del material. S Y
Modulo, m (mm)
1 3 10 20
S Y 1.1 1 0.9 0.85
Tabla 4.10 Selección del coeficiente de rugosidad superficial R Y
Valores de Dureza R Y H<350 1.2

42
H≥350 1
Determinación del coeficiente de dimensiones de la rueda XF K
1 = XF K Para: 300 2 ≤ d mm
8 . 0 = XF K Para: 2000 2 ≥ d mm
−
− = 8500
300 1 2 d K XF Para: 2000 300 2 < < d mm
4.4 Metodología de cálculo de correa trapezoidal. 4.4.1 CRITERIOS DE CÁLCULO. Debido a la variación de los esfuerzos en la correa, durante el funcionamiento de la
transmisión, la rotura por fatiga es el deterioro principal que se produce en la correa.
Teniendo en cuenta lo anterior, se puede definir que los cálculos fundamentales que se
realizan en las transmisiones por correas son los de capacidad tractiva, que determina la
fiabilidad de adherencia entre la correa y la polea; y el cálculo de duración, que
depende en condiciones normales de explotación de la resistencia a la fatiga. El objetivo
del cálculo es obtener el perfil de las correas y la cantidad de ellas necesarias para
transmitirla carga con una duración adecuada. Conjuntamente con el perfil de la correa,
se determinan las dimensiones de los principales elementos de la transmisión, tales
como la distancia entre centros a, los ángulos de contacto α , y la longitud de la correa
L. Con la geometría preliminar se realiza el cálculo de duración de la transmisión.
4.4.2 CÁLCULO DE CAPACIDAD TRACTIVA. El cálculo de capacidad tractiva tiene como objetivo, encontrar una transmisión que
cumpla con las condiciones exigidas de carga, determinando el perfil de correa
necesario y la cantidad de correas, en caso que no se pueda transmitir toda la potencia
con una sola.
La base del cálculo está en determinar una potencia de diseño que se compara con las
condiciones de trabajo de la transmisión. Esto se expresa en la condición:

43
Donde:
ND→ Potencia de diseño. [Kw]
[N]→ Potencia admisible. [Kw]
El valor del factor de servicio depende del carácter de la carga y del tipo de máquina, se
emplea para simular las condiciones de trabajo del accionamiento en la actividad de
diseño. En los catálogos generalmente el factor fs ≥ 1 y e n algunos libros, como en el
libro de texto Dobrovolski
Elementos de Máquinas es definido como un factor de régimen de carga Cr,
correspondiendo el factor de servicio como el inverso del factor de régimen de carga fs
= 1/Cr.
Potencia admisible.
La potencia admisible se calcula como:
Donde:
z→ Número de correas.
Nc→ Potencia de catálogo.
Es la potencia que aparece en las tablas de los catálogos, para una sola correa y es
declarada por el fabricante para cada perfil, se obtiene en ensayos con
u=1, L=L0 y α=180°.
Nad→ Potencia adicional.
Cuando la relación de transmisión es mayor que 1, los fabricantes recomiendan
incrementar la potencia a transmitir en un pequeño por ciento, debido a que disminuyen
los esfuerzos de flexión, comparado con los que se producen en el ensayo para u=1.
cα→ Factor por ángulo de contacto.
Este factor tiene en cuenta el incremento de capacidad de carga que tiene una
transmisión por correas para ángulos de contacto mayor de 180°, y el decrecimiento de
esta para ángulos menores.
α1→ Angulo de contacto más pequeño.
cL→ Factor por corrección en longitud.
44
Este factor tiene en cuenta el incremento de la capacidad de trabajo para transmisiones
que trabajan con longitud desde correa mayores que Lo y viceversa.
L→ Longitud real de la correa.
L0→ Longitud para el ensayo. (Catálogo)
La relación N [N] D ≤ se emplea cuando se quiere comprobarlas condiciones de carga
de una transmisión. En cambio, cuando se desea diseñar la transmisión, se despeja el
número de correas y se obtiene la ecuación fundamental del cálculo de capacidad de
carga de una transmisión por correas.
A continuación se brindan las tablas necesarias para su cálculo. Ver anexo # 6
4.4.3 CALCULO DE DURABILIDAD.
El cálculo de duración de la correa depende de muchos factores, de manera que realizar
un cálculo real y objetivo de las horas que trabajará la correa sin deteriorarse no es
posible. Son varios los factores que influyen es la duración de las correas, como pueden
ser las condiciones de almacenamiento y de trabajo, la contaminación con grasa yagua,
la rugosidad superficial de las ranuras y alineación de las poleas, vibraciones, tensiones
y temperaturas entre otros.
Los datos que se tienen de las investigaciones, permiten sólo aproximarse a una
valoración por separado de la influencia de los esfuerzos que cambian cíclicamente y
del calentamiento de la correa durante su trabajo. Se conoce que la vida útil de las
correas trapeciales es directamente proporcional a d5,35 e inversamente proporcional a
S1 4,12 ya la temperatura t3.

45
Para una duración adecuada de la transmisión pueden ser dadas a algunas
recomendaciones de diseño:
Adoptar diámetros de poleas los mayores posibles y siempre superiores a los
diámetros mínimos declarados por los fabricantes.
Trabajar con ciclos de carga (flexiones/segundo)menores que los máximos admisibles
Temperaturas en la correas menores de 60°C.
Para abordar el cálculo de duración se toma como referencia los esfuerzos en las correas. Los mayores cambios en los valores de los esfuerzos se producen durante la flexión de la correa al abrazar las poleas y en el paso por el ramal de carga, por lo que durante un ciclo completo los esfuerzos varían en la correa tantas veces como poleas y rodillos tenga la transmisión. En la correa que pasa por varias poleas se acumulan los deterioros por fatiga, que en definitiva está muy vinculado con su rotura, para calcular su duración se parte de los esfuerzos máximos que surgen en la correa al abrazar la polea más pequeña en el ramal de carga.
La expresión general recomendada por Dobrovolski es:
De aquí la duración de la correa será:
Donde:
H→ Duración en horas.
Nb→ Número de ciclos básicos para el deterioro.
Nb=107→ Correas trapeciales normales.
Nb=109→ Correas trapeciales estrechas
if→ Ciclos de flexión por segundo.
c→ Número de poleas.
Se debe cumplir que: if ≤ [if]
[if] =30 s1→ Correas trapeciales normales.
[if] =60 s1→ Correas trapeciales estrechas.
σfat→ Esfuerzo límite de fatiga.
σfat = 6 MPa Correas planas.
σfat = 9 MPa Correas trapeciales normales.
σfat = 12 MPa Correas trapeciales estrechas.
m→ Exponente de la curva de fatiga.
m= 5….6 Correas planas

46
m = 6...11 → Correas trapeciales.
σmax → Esfuerzo máximo en la correa [MPa].
Las expresiones anteriores responden a un cálculo teórico, de lo que se supone suceda
en la correa durante su funcionamiento, siendo este cálculo el que usualmente se emplea
en los libros de texto. Los fabricantes, a partir de ensayos que realizan a las correas que
producen, se acercan un poco más a la realidad, brindando expresiones que son
resultados de estos ensayos.
Como otra forma de realizar el cálculo de duración de las correas, se abordará a
continuación el cálculo de durabilidad propuesto por Good Year en sus catálogos a
partir de la expresión:
Donde: TF→ Fuerza límite por fatiga (N).
T1, T2→ Fuerzas en la correa (N).
TFC→ tensión por fuerza centrífuga (N).
ρ→ masa por metro de correa [Kg/m]
TFlex i→ Fuerza por flexión en la correa (N).
Cb→ Coeficiente de flexión
El cálculo de duración parte de la misma base, considerar a la rotura por fatiga el
deterioro fundamental en el fallo de la correa.
El procedimiento de Good Year es semejante al procedimiento de Dobrovoslki, pero
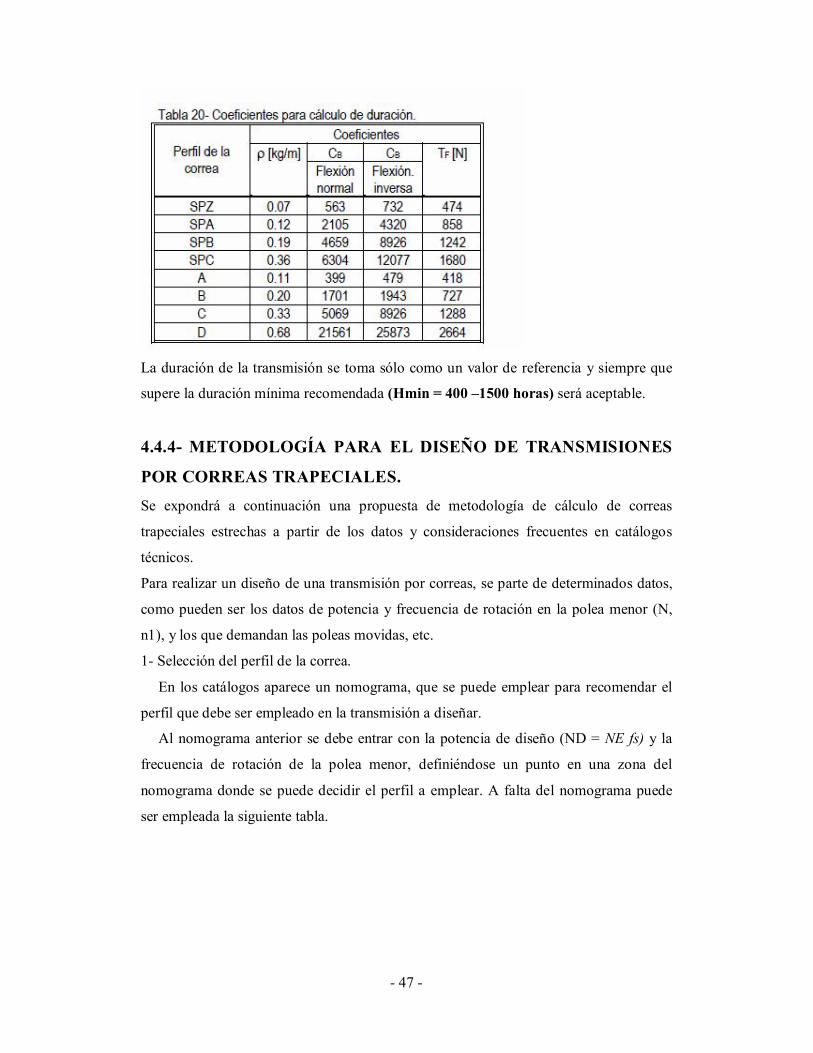
realiza el cálculo teniendo en cuenta las fuerzas y no los esfuerzos. En la Tabla 20 se
dan los valores de los coeficientes empleados en el procedimiento de Good Year.
47
La duración de la transmisión se toma sólo como un valor de referencia y siempre que
supere la duración mínima recomendada (Hmin = 400 –1500 horas) será aceptable.
4.4.4 METODOLOGÍA PARA EL DISEÑO DE TRANSMISIONES
POR CORREAS TRAPECIALES. Se expondrá a continuación una propuesta de metodología de cálculo de correas
trapeciales estrechas a partir de los datos y consideraciones frecuentes en catálogos
técnicos.
Para realizar un diseño de una transmisión por correas, se parte de determinados datos,
como pueden ser los datos de potencia y frecuencia de rotación en la polea menor (N,
n1), y los que demandan las poleas movidas, etc.
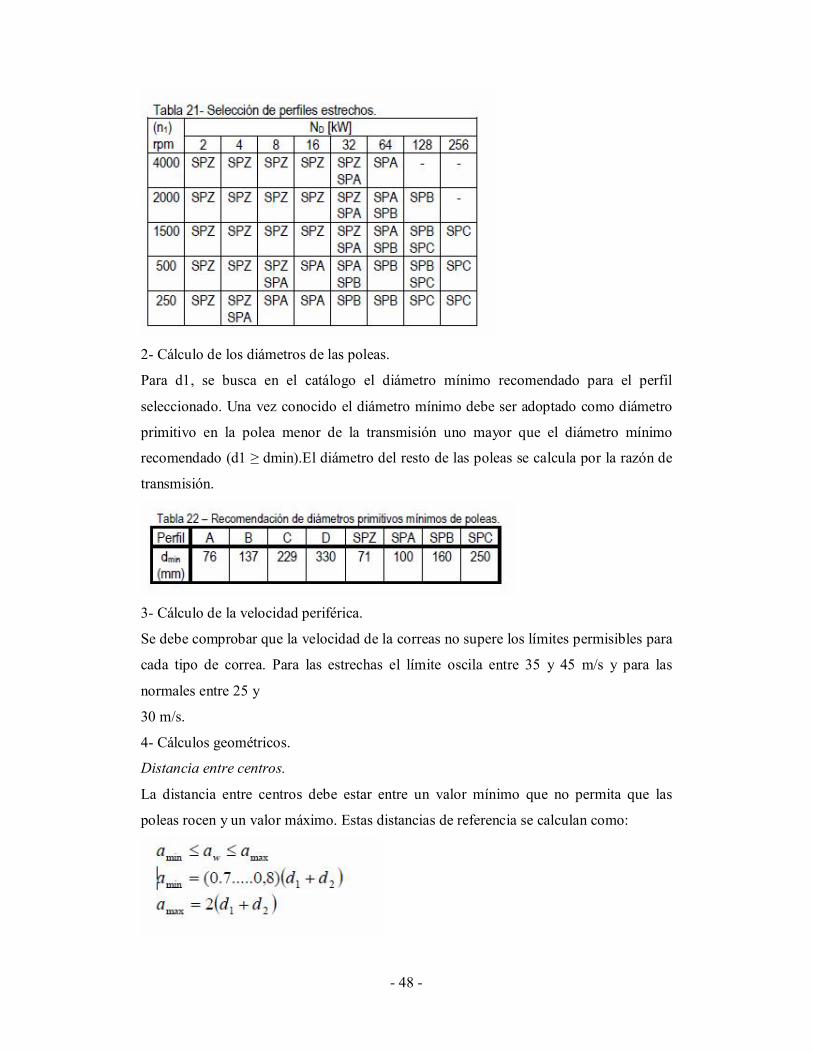
1 Selección del perfil de la correa.
En los catálogos aparece un nomograma, que se puede emplear para recomendar el
perfil que debe ser empleado en la transmisión a diseñar.
Al nomograma anterior se debe entrar con la potencia de diseño (ND = NE fs) y la
frecuencia de rotación de la polea menor, definiéndose un punto en una zona del
nomograma donde se puede decidir el perfil a emplear. A falta del nomograma puede
ser empleada la siguiente tabla.
48
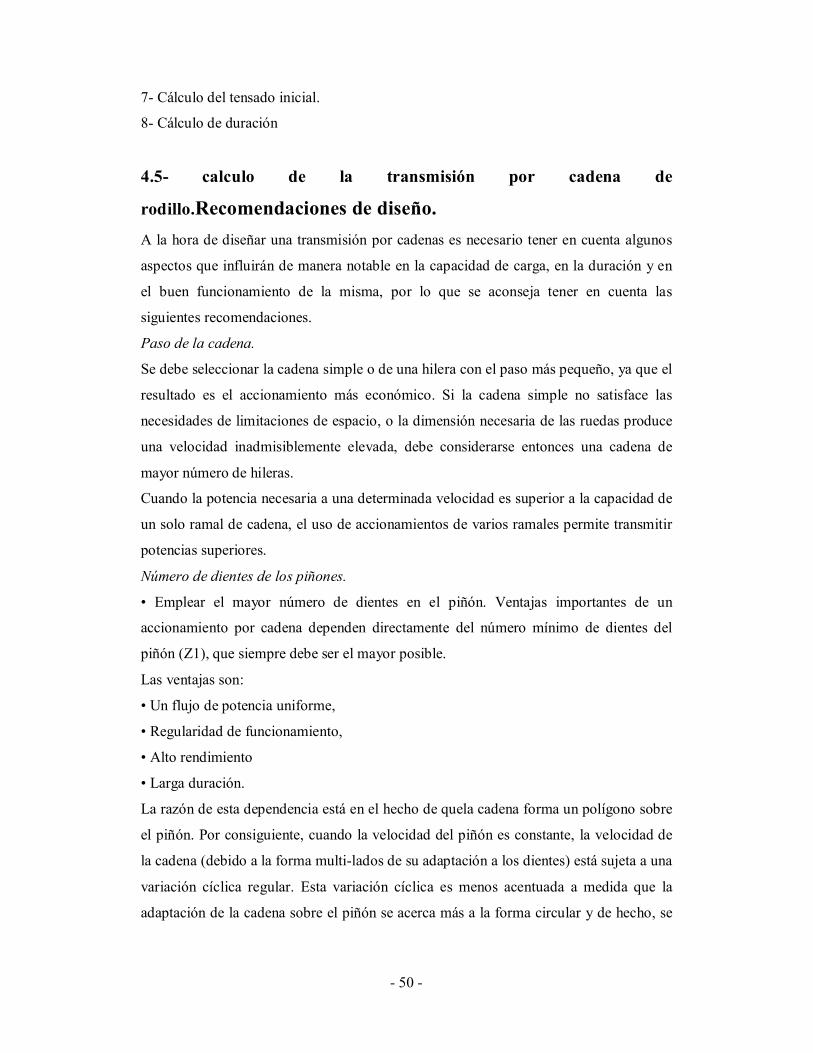
2 Cálculo de los diámetros de las poleas.
Para d1, se busca en el catálogo el diámetro mínimo recomendado para el perfil
seleccionado. Una vez conocido el diámetro mínimo debe ser adoptado como diámetro
primitivo en la polea menor de la transmisión uno mayor que el diámetro mínimo
recomendado (d1 ≥ dmin).El diámetro del resto de las poleas se calcula por la razón de
transmisión.
3 Cálculo de la velocidad periférica.
Se debe comprobar que la velocidad de la correas no supere los límites permisibles para
cada tipo de correa. Para las estrechas el límite oscila entre 35 y 45 m/s y para las
normales entre 25 y
30 m/s.
4 Cálculos geométricos.
Distancia entre centros.
La distancia entre centros debe estar entre un valor mínimo que no permita que las
poleas rocen y un valor máximo. Estas distancias de referencia se calculan como:

49
La longitud de la correa está en función de la disposición geométrica de la transmisión.
Puede ser calculada por las expresiones recomendadas en las tablas del libro de texto
DobrovolskiElementos de Máquinas. En el caso de transmisiones de 2 poleas pueden
ser empleadas las siguientes fórmulas.
Para una transmisión por correa abierta y dos poleas:
Para una transmisión por correa cruzada y dos poleas:
La longitud calculada en dependencia de la distancia entre centros tentativa se
normaliza y se calcula la diferencia entre la longitud real y la normalizada. ΔL=LnL
De manera que es necesario re calcular la distancia entre centros, llegando a la distancia
de montaje real.
Angulo de abrazo de la correa.
Para una transmisión abierta con dos poleas las expresiones
Para otra disposición de la transmisión consultar la tabla del libro de texto Dobrovolski
Elementos de Máquinas.
5 Comprobación de los ciclos de flexión.
v velocidad [m/s]
Ln Longitud de la correa [mm]
En este caso c es el número de poleas en la transmisión.
Es necesario comprobar que las flexiones por segundo no sobrepasen la admisible. Para
las normales el límite es 30flexiones/s y para las estrechas el límite es 60 flexiones/s.
6 Cálculo del número de correas.
50
7 Cálculo del tensado inicial.
8 Cálculo de duración
4.5 calculo de la transmisión por cadena de
rodillo.Recomendaciones de diseño. A la hora de diseñar una transmisión por cadenas es necesario tener en cuenta algunos
aspectos que influirán de manera notable en la capacidad de carga, en la duración y en
el buen funcionamiento de la misma, por lo que se aconseja tener en cuenta las
siguientes recomendaciones.
Paso de la cadena.
Se debe seleccionar la cadena simple o de una hilera con el paso más pequeño, ya que el
resultado es el accionamiento más económico. Si la cadena simple no satisface las
necesidades de limitaciones de espacio, o la dimensión necesaria de las ruedas produce
una velocidad inadmisiblemente elevada, debe considerarse entonces una cadena de
mayor número de hileras.
Cuando la potencia necesaria a una determinada velocidad es superior a la capacidad de
un solo ramal de cadena, el uso de accionamientos de varios ramales permite transmitir
potencias superiores.
Número de dientes de los piñones.
• Emplear el mayor número de dientes en el piñón. Ventajas importantes de un
accionamiento por cadena dependen directamente del número mínimo de dientes del
piñón (Z1), que siempre debe ser el mayor posible.
Las ventajas son:
• Un flujo de potencia uniforme,
• Regularidad de funcionamiento,
• Alto rendimiento
• Larga duración.
La razón de esta dependencia está en el hecho de quela cadena forma un polígono sobre
el piñón. Por consiguiente, cuando la velocidad del piñón es constante, la velocidad de
la cadena (debido a la forma multilados de su adaptación a los dientes) está sujeta a una
variación cíclica regular. Esta variación cíclica es menos acentuada a medida que la
adaptación de la cadena sobre el piñón se acerca más a la forma circular y de hecho, se
51
hace insignificante en muchas aplicaciones cuando el número de dientes del piñón
motriz es superior a 19.
Existen, sin embargo, aplicaciones en las que el ahorro de espacio es una necesidad vital
de diseño y otras en las que, las condiciones velocidad/potencia son tales que un número
de dientes más pequeño (inferior a 17) puede dar un funcionamiento aceptable, de modo
que puede obtenerse un accionamiento compacto y satisfactorio, por ejemplo, en
maquinaria de oficina, accionamientos movidos a mano, mecanismos, bicicletas, etc.
Número de dientes impar. Muchos accionamientos tienen un número par de eslabones en su cadena debido a la
sencillez del eslabón de cierre. Usando un piñón motriz con un número de dientes
impar, se obtiene una distribución uniforme del desgaste tanto en la cadena como en el
piñón.
• Número máximo de dientes. El número máximo de dientes en cualquier piñón conducido (Z2) no debe superar el
rango 120 a 150dientes. Esta limitación se debe al hecho que, para una elongación dada
de la cadena debida al desgaste, el diámetro primitivo de trabajo de la cadena sobre el
piñón aumenta en proporción al diámetro primitivo nominal, esto es, la cadena se sitúa
en posiciones más elevadas sobre el diente del piñón, por lo que cuando se desgastan las
articulaciones se manifiesta con más facilidad el salto de la cadena sobre la rueda
mayor. Se considera que el desgaste de la cadena presumible es el que da una
elongación del orden del 23% sobre la longitud nominal.
Distancia entre centros. Para una duración óptima en cuanto a desgaste, la distancia entre centros de dos ruedas,
debe ser del orden de 30 a 50 veces el paso de la cadena.
La distancia entre centros mínima viene dada, algunas veces, por el número de dientes
que engranan con la cadena en el piñón motriz. Se recomienda que el engrane mínimo
sea de 6 ó 7 dientes. Cuando las relaciones de transmisión son grandes, es importante
comprobar que el ángulo de engrane en el piñón motriz no sea inferior a 1200.
En transmisiones con 2 ruedas, un engrane 1200 se obtiene cuando la distancia entre
centros es igual o superior a la diferencia entre el diámetro primitivo de las ruedas. Un
aumento de la distancia entre centros aumenta el engrane en el piñón.
La distancia entre centros debe adaptarse a la conveniencia de usar una cadena con un
número par de eslabones, para evitar el uso de un eslabón acodado, práctica que no se

52
recomienda, salvo en circunstancias especiales. Generalmente los fabricantes brindan
los valores de distancias entre centros, en función del paso de la cadena.
4.5.1 Pasos para el cálculo
1. La selección del # de dientes de la rueda menor
v Se recomienda para: (1 7) i = ÷ 1 (29 13) z = ÷
a mayor relación de transmisión menor ( 1 z )
2. Cálculo del número de dientes de la rueda mayor ( 2 z )
v 1
2
z z
i = i z z ∗ = 1 2
Nota: Se recomienda que el 2 z ≤ 120 para evitar que la cadena salte de las ruedas
nota: El número de dientes de las ruedas de estrellas (sproke) se recomienda que
sea impar, ésta propicia el desgaste mas uniforme de las ruedas y articulaciones.
Recalcular i (su valor no debe diferenciarse con el valor de i anterior mas de un 3
%.)
3. Determinar el coeficiente que caracteriza las condiciones de montaje y
explotación de la transmisión
v r l reg h a d e k k k k k k k ∗ ∗ ∗ ∗ ∗ = Donde:
− d k Coeficiente que depende del dinamismo de la carga.
(Estática) 1 = d k ,
(Choque) 5 . 1 2 . 1 − = d k
− a k Depende de la distancia entre centros.

53
a k = 1
− h k Coeficiente que depende de la posición de la transmisión
Si la línea de centros de las ruedas está inclinada hacia la línea del horizonte en:
Angulo menor de 0 60 1 = h k
25 . 1 = h k mas de 0 60
− reg k Coeficiente que tiene en cuenta la posibilidad de regular la distancia entre
centro:
Cuando se puede regular 1 = reg k
Cuando no se puede regular 25 . 1 = reg k
− l k Coeficiente que depende del carácter de lubricación
8 . 0 = l k (ininterrumpida) (baño de aceite)
5 . 1 = l k (Periódica),
1 = l k (Goteo)
− r k Coeficiente que depende del régimen de trabajo de la transmisión.
1 = r k (Un turno)
25 . 1 = r k (Dos turnos),
45 . 1 = r k (Tres turnos)
4. Determinar el paso de la cadena.
v [ ] P m z k Mt t e
1
1 8 . 2 ∗
≥ (mm )
v 1
1 1 w
N Mt =

54
Donde:
= 1 Mt Momento tórsor a la entrada ( mm N )
= m Numero de fila de la transmisión
[ ]= P La presión admisible en las articulaciones ( 2 mm N )
1 n Cantidad de revoluciones por minutos (rpm)
Selección de la presión admisible en las articulaciones para Z1 = 17 Paso (t)
1 n (rpm) 12.5 12.87 19.05 25.4 31.75 38.1 44.45 50.2 Hasta(20) 52 52 52 48 46 43 41 39 50 46 43 39 36 34 31 29 27 100 37 34 31 29 27 25 23 22 200 29 27 25 23 22 19 18 17 300 25 24 22 20 19 17 16 15 500 22 20 18 17 16 14 13 12 750 19 17 16 15 14 13 12 12 1000 17 16 14 13 13 1250 16 15 13 12
v [ ] P = [ ] P ( ) [ ] 17 01 . 0 1 1 − + Z para Z1 ≠ 17
Nota: Después de calculado el paso se obtienen a partir de el mismo las demás
dimensiones de la cadena.
5. Cálculo de la distancia entre centro
v (30 50) a t = ÷ ∗ (mm)
(1 2) i = ÷ (Se toman los valores menores 30)
(5 7) i = ÷ (Se toman los valores mayores 50)
6. Cálculo de la longitud de la cadena
v ( ) 2 1
1 2
2 2 2 0.5
z z
l a z z t t a π
+ ∗ = ∗ + + ∗ + (mm )
7. Números de eslabones

55
v t l y = (Se recomienda que sea un número par.)
8. Recalcular la distancia entre centros
v
Π −
−
+ − +
+ − =
2 1 2
2 2 1 2 1
2 8
2 2 4 z z z z
y z z
y t a
9. Determinar la velocidad de la cadena
v 4 1 1
10 6∗ ∗ ∗
= t n z V ( s m ) t = mm n1= rpm
10. Cálculo del esfuerzo periférico
v V N
F t 1 = ( N)
Donde:
− 1 N Potencia (watt)
− V Velocidad (m/s)
11. Calculo de duración de la cadena
KC Coeficiente del tipo de cadena. KC = 1,2 (Cadena de Rodillo)
KI Coeficiente de Intensidad de desgaste KI = 1 Condiciones normales de lubricación y limpieza.
Δt = 3% Norma de desgaste admisible.
4.6 Diseño de la carcasa.
56
Una vez que el diseñador tenga los componentes de trabajo diseñados, comienza el
diseño de la carcasa, cuyo proceso debe ser creativo y práctico.
¿Qué medidas deben ser tomadas para montar los cojinetes meticulosamente y poder
transmitir sus cargas con alta fiabilidad a través de la carcasa a la estructura sobre la
cual el reductor de velocidad se encuentra montado? ¿Cómo ensamblar a todos los
elementos dentro de la carcasa? ¿Cómo lubricar a los engranajes y cojinetes? ¿Qué
material utilizar en la fabricación de la carcasa? ¿Debe la carcasa ser fundida, soldada o
estar formada por elementos ensamblados? Éstas y otras interrogantes son las que debe
formularse y responder el diseñador.
Las dimensiones de los elementos de armazón y la tapa se eligen por consideraciones
constructivas y en dependencia de los elementos de transmisión que pueden ser por
rueda cilíndrica, cónica o por tornillo sin fin, teniendo en cuenta estas consideraciones
se escoge el largo y la altura. En dependencia de estos elementos se diseña la carcasa.
En los sitios de la armazón en que se deben colocar los cojinetes, se proyectan unos
espaldones. Con el fin de aumentar la rigidez del reductor en los lugares que se
transmiten los esfuerzos de los cojinetes a la armazón se previenen nervios o
modificaciones respectivas de formas de la pared de armazón.
Los pernos para sujetar la tapa sobre la armazón se deben situar lo más cerca posible a
los cojinetes, para lo cual se deberá convertir también espaldones para las tuercas. Con
el fin de facilitar el desmontaje de la tapa, en el armazón se hacen, a veces, agujeros
con rosca para los pernos de separación.
Para poder revisar cómodamente el engranaje, para el llenado y la salida del aceite, la
instalación del indicador de nivel del aceite es a consideración del diseñador por que
existen diferentes tipos de medidores como son (termómetro, visor o varilla), en la tapa
y en la armazón se abren unos agujeros de requerida forma y dimensiones que se
cierran con tapas, tapones, racores, etc. La tapa y la armazón deben tener armellas y
gancho para la elevación y el transporte de estos elementos y de todo el reductor.
Al componer un reductor se resuelve una serie de problemas constructivos: la relación
recíproca de las dimensiones del armazón y de la tapa, comodidades del montaje y
desmontaje, aseguramiento de las condiciones de lubricación de la transmisión, etc.
El espesor de la pared del armazón del reductor se fija en función de las
dimensiones máximas de la transmisión:
57
Para el reductor de un escalón
=0.25* +1mm
Para el reductor de dos escalones
=0.025* +3mm
Para el reductor de tres escalones
=0.025* +5mm
Es la distancia interaxial, en mm.
Es la distancia interaxial del escalón de marcha lenta del reductor, en mm.
Es necesario observar que >8mm. El espesor de la pared de la tapa del reductor es
= 0.8* >7mm
4.7 Metodología y Cálculo de los árboles.
4.7.1Introducción.
Como es conocido, los árboles y ejes son elementos de máquinas sobre los cuales se
montan las partes giratorias de las máquinas, resultando ser los verdaderos ejes
geométricos de estas partes en rotación. Los árboles, a diferencia de los ejes, además de
sostener los elementos giratorios trasmiten momentos torsores, por consiguiente, los
árboles resultan cargados, no solo por esfuerzos normales debido a los momentos
flectores, sino también, por esfuerzos tangenciales generados por momentos torsores, en
toda la longitud o en sectores aislados del árbol.
Los materiales empleados para la construcción de los árboles deben distinguirse por las
características de: resistencia suficientemente alta, pequeña sensibilidad a la
concentración de tensiones, capacidad de poder ser tratados térmica y quimico
termicamente y poseer buena maquinabilidad.
Tomando lo anterior en consideración es indiscutible que el material más empleado por
su excelencia es el acero. Por ello durante este curso serán tratados con exclusividad los
árboles rectos de acero, para los cuales se brindan algunas especificidades de los
materiales empleados.
58
4.7.2 El acero como material de árboles y ejes.
La selección de los materiales es una de las partes que integran el diseño de cualquier
pieza de las máquinas; en determinados casos no se presta a este asunto toda la atención
que merece, y hemos de insistir sobre tan fundamental tema recordando que, antes de
decidirse por un material determinado, por sencilla y poca importancia que se le
conceda a una pieza a construir, se elija el que reúna las características más apropiadas,
no ya solo por su resistencia, sino por su facilidad de maquinado y tratamiento, y muy
especialmente también, por el factor económico que puede influir notablemente en el
costo de fabricación, por tanto, ha de elegirse el más apropiado con todo detenimiento.
La resistencia y rigidez son factores clave siempre tomados en cuenta en la selección de
un material. Igualmente importantes es la confiabilidad relativa y la durabilidad de la
pieza cuando se consideran alternativas posibles con respecto al material.
El acero es el material que se usa con más frecuencia para la construcción de los árboles
y ejes. Variando adecuadamente la composición, el tratamiento térmico y el tratamiento
mecánico pueden obtenerse propiedades mecánicas que se encuentren entre márgenes
muy amplios.
Generalmente, los árboles y ejes son hechos de barras circulares de acero al carbón
estirado en frío. Son usadas barras de acero aleado cuando se requiere tenacidad,
resistencia al impacto y alta resistencia en materiales disponibles de modo comercial.
En estos casos, los árboles y ejes pueden tratarse térmicamente para obtener las
propiedades requeridas. Cuando la resistencia al desgaste en la superficie es un factor
muy importante, puede usarse acero de cierto grado de carburación. Sin embargo, para
no aumentar el costo, el diseñador deberá tratar de usar un acero con bajo contenido de
carbono, si esto fuera posible, y posteriormente garantizar un endurecimiento local por
tratamiento térmico o térmicoquímico.
Las barras de acero estiradas en frío tienen las propiedades físicas superiores a las barras
estiradas en caliente del mismo material, destacándose una mayor resistencia a la
fluencia, a la fractura y a la fatiga. Sin embargo, los valores de fatiga altos a veces son
afectados por los esfuerzos residuales de tensión en la superficie que son causados por
el estirado en frío
Prácticamente es aconsejable que las características mecánicas de los aceros sean
determinadas por el constructor y/o proveedor, mediante ensayos de los materiales
59
empleados y/o disponibles para la fabricación de los árboles y ejes, con la intención de
conocer exactamente los valores limites de resistencia y realizar cálculos precisos de los
coeficientes de seguridad. En su defecto, pueden ser empleados valores suministrados
por la literatura asociada ala resistencia de materiales.
4.7.3 Criterios para el dimensionado previo de árboles.
Durante el diseño de árboles de transmisión, se hace necesario asegurar en estos
elementos de máquinas: resistencia mecánica, rigidez suficiente y un régimen de
explotación no coincidente con el régimen de resonancia del sistema. La tarea de
asegurar las anteriores condiciones es una parte integrante del proceso de proyección de
los árboles y ejes. Generalmente una etapa importante de este proceso se vincula a los
criterios empleados durante el dimensionado previo, que permiten determinar aquellas
dimensiones básicas del árbol que garanticen una adecuada capacidad de trabajo y un
costo aceptable según las exigencias de fiabilidad establecidas en el diseño.
Es indiscutible que el criterio de dimensionado previo de los árboles empleado con
mayor frecuencia por los proyectistas es el asociado con un cálculo clásico de
resistencia mecánica. A pesar de ser reconocido en este criterio numerosas
conveniencias, debemos de ser conscientes de que no toma en consideración aspectos
tales como: dimensiones necesarias en las secciones que satisfacen la capacidad de
trabajo de otros elementos vinculados a los árboles como los cojinetes de rodamiento y
de deslizamiento, la suficiente rigidez de los árboles establecida de acuerdo con las
condiciones de explotación y del funcionamiento normal del conjunto y variación de las
magnitudes de las cargas, entre otros aspectos.
Muchas veces, criterios para el dimensionado previo que emplean dependencias
empíricas o empíricasconvencionales satisfacen más convenientemente esta etapa del
proyecto, que aquellos criterios clásicos de resistencia mecánica, que requieren de la
suposición de esquemas de montajes y distancias entre apoyos para el cálculo de los
momentos flectores en los árboles en la etapa de diseño previo.
A continuación, serán brindados varios criterios para el dimensionado previo de árboles
rectos de acero con montaje horizontal, basados en dependencias empíricas y fórmulas
clásicas de Resistencia de Materiales, de forma tal que el estudiante disponga de un
60
grupo de criterios prácticos para el dimensionado previo de las secciones básicas de
estos tipos de árboles.
a ) Dimensionado previo según dependencias empíricas.
La base de este criterio de dimensionado previo es la experiencia obtenida de otras
construcciones, verificadas durante la explotación y que han demostrado una seguridad
y fiabilidad aceptable. Estos diseños confiables permiten establecer relaciones prácticas
entre las dimensiones básicas del árbol y parámetros fundamentales del componente o
agregado de máquina donde será empleado el árbol que se diseña. Este método debe ser
aplicado en árboles donde no es exigida una optimización de las dimensiones y se desea
tomar la experiencia práctica anterior. A continuación brindados algunos ejemplos:
a) Reductor de velocidad de una etapa compuesto por engranajes cilíndricos:
b) Reductor de velocidad de una etapa compuesto por engranaje de tornillo sinfín:
c) Árbol de levas de un motor de combustión interna:
Donde:
d1: diámetro del extremo en voladizo del árbol rápido.
d2: diámetro del extremo en voladizo del árbol lento.
dm: diámetro del extremo del eje de un motor con igual torsor nominal que el momento
torsor nominal del árbol rápido del reductor de velocidad.
aw: distancia interaxial entre los árboles del reductor de velocidad.
dL: diámetro del muñón del árbol de levas.
Dc: diámetro de los cilindros del motor de combustión interna.
b) Dimensionado previo según dependencias semiconvencionales.

61
De no existir dependencias empíricas seguras para el árbol que se desea proyectar,
puede ser utilizado un cálculo semiconvencional donde solo se considera el momento
torsor y no se requiere de una evaluación inicial del momento flector, en una etapa en
que aún no se han determinado las dimensiones del árbol en longitud, ni se conoce con
precisión la ubicación exacta de los apoyos.
Planteando la condición de resistencia mecánica a esfuerzos tangenciales debido a la
torsión de una sección circular, puede ser obtenida una fácil ecuación para el
dimensionado previo:
De donde:
Siendo:
Mt: Momento torsor en la sección del árbol (Nmm)
d: Diámetro de la sección analizada del árbol (mm)
d0: Diámetro interior de la sección del árbol (mm). En caso de árboles macizos debe ser
tomado d0 = 0.
Generalmente la proporción d0 / d = 0,4... 0,6 en árboles huecos.
[τ]: Esfuerzo tangencial admisible según ciclo de carga del torsor (MPa).
Generalmente en este cálculo, como es despreciado el efecto del momento flector,
deben de ser tomados valores muy bajos del esfuerzo tangencial admisible, previendo
que posteriormente el árbol garantice una resistencia suficiente a la combinación de los
esfuerzos normales (debido al momento flector que no ha sido considerado en la etapa
de dimensionado previo) y los esfuerzos tangenciales. Con frecuencia se adoptan
coeficientes de seguridad entre 10 y 20, los que reportan valores de esfuerzos
tangenciales admisibles entre 12 y 20 MPa para los aceros típicos de árboles.
Una forma bastante difundida de aplicar este cálculo fue la prevista en la norma GOST
1208066 (ratificada hasta 1985) y también asumida por las antiguas normas CAME
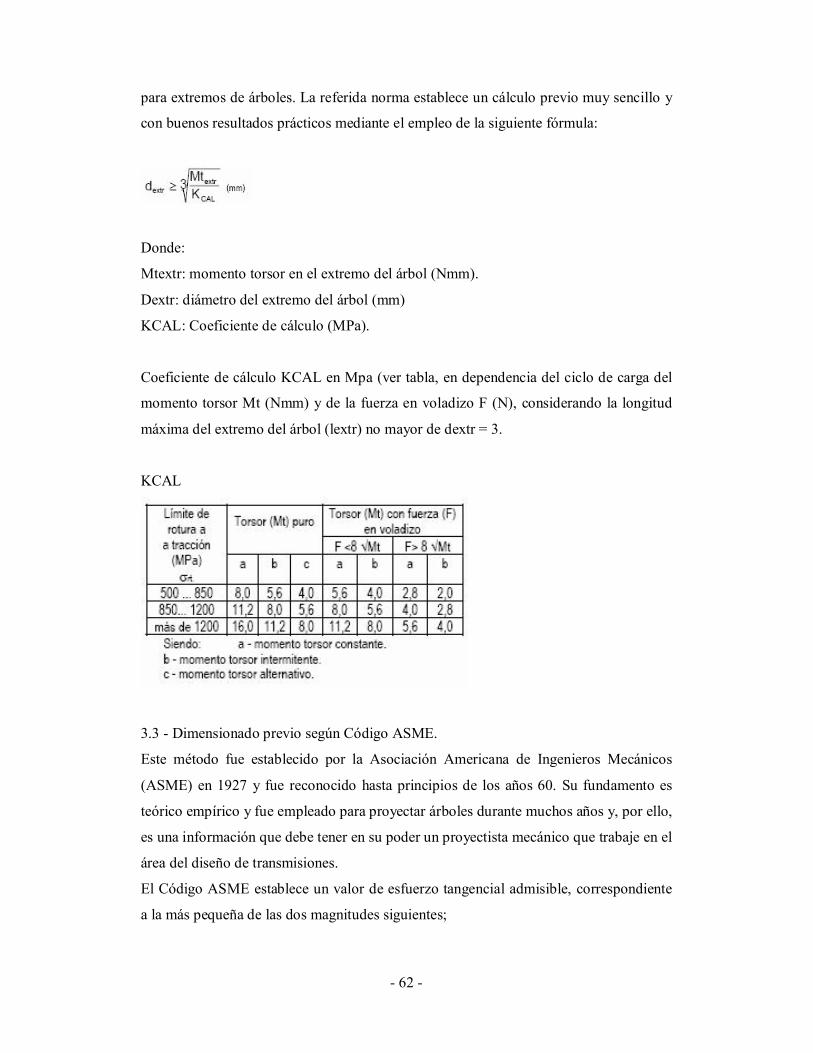
62
para extremos de árboles. La referida norma establece un cálculo previo muy sencillo y
con buenos resultados prácticos mediante el empleo de la siguiente fórmula:
Donde:
Mtextr: momento torsor en el extremo del árbol (Nmm).
Dextr: diámetro del extremo del árbol (mm)
KCAL: Coeficiente de cálculo (MPa).
Coeficiente de cálculo KCAL en Mpa (ver tabla, en dependencia del ciclo de carga del
momento torsor Mt (Nmm) y de la fuerza en voladizo F (N), considerando la longitud
máxima del extremo del árbol (lextr) no mayor de dextr = 3.
KCAL
3.3 Dimensionado previo según Código ASME.
Este método fue establecido por la Asociación Americana de Ingenieros Mecánicos
(ASME) en 1927 y fue reconocido hasta principios de los años 60. Su fundamento es
teórico empírico y fue empleado para proyectar árboles durante muchos años y, por ello,
es una información que debe tener en su poder un proyectista mecánico que trabaje en el
área del diseño de transmisiones.
El Código ASME establece un valor de esfuerzo tangencial admisible, correspondiente
a la más pequeña de las dos magnitudes siguientes;

63
Donde:
σft: esfuerzo límite de fluencia a tracción del material (MPa).
σrt: esfuerzo límite de rotura a tracción del material (MPa).
fCT: factor por concentración de tensiones. En caso de existir algún concentrador de
tensiones, debido a un chivetero o una zona de transición por cambio de sección, debe
de ser tomado fCT = 0,85. En caso de no existir un concentrador de tensiones fCT =1,0.
La ecuación para el dimensionado previo según el Código ASME está basada en la
teoría de fallo por el máximo esfuerzo cortante, para la cual es calculado un momento
torsor equivalente:
Donde:
mte: momento torsor equivalente (Nmm).
CF: coeficiente modificador de la flexión. (Ver tabla 4)
CT: coeficiente modificador de la torsión. (Ver tabla 4)
c) Dimensionado previo según criterio convencional de resistencia
mecánica.
64
Como se conoce, para el dimensionado previo de los árboles, según el criterio de
resistencia mecánica, es necesario calcular los momentos de flexión y de torsión en las
secciones del árbol. Por tal motivo, debe ser confeccionado un esquema del árbol que
permita su análisis como una viga montada sobre apoyos, donde estos se disponen de
forma aproximada a la prevista para el diseño final. Deben ser ubicadas
convenientemente las cargas generadas por los elementos que el árbol debe soportar y
de aquellos que se vinculan a él. En muchos casos, se puede despreciar la influencia del
propio peso de los elementos, como también la magnitud del momento de las fuerzas de
fricción en los cojinetes.
Generalmente la forma de la distribución de la carga por las superficies portantes y
de apoyo con frecuencia es desconocida, por lo que la carga calculada puede suponerse
uniformemente distribuida o, mucho más cómodo, a menudo concentrada. En caso de
que se desee, durante el cálculo de los momentos flectores, precisar la ubicación de los
apoyos en los árboles y ejes pueden servir como referencia los siguientes esquemas.
Las cargas a los árboles y ejes se trasmiten a través de las piezas montadas en estos,
como son las ruedas dentadas, las poleas, sprockets, acoplamientos, etc. En caso de
cálculos sin exigencia de gran precisión, se adopta que las piezas acopladas con el árbol
trasmiten las fuerzas y momentos exactamente en la mitad de la longitud del encaje.
Para casos con mayor exigencia de exactitud, conviene tomar las fuerzas y momentos
aplicados cercanos a los bordes de la zona de encaje según se muestra en el , tomándose
los mayores valores para los montajes con interferencia y cubos rígidos y los menores
valores para los ajustes deslizantes con cubos flexibles.
El esquema confeccionado posibilitará determinar las magnitudes de los momentos
flectores y torsores indispensables para la aplicación del criterio de resistencia
mecánica. Cuando sobre el árbol actúan cargas en distintos planos, estas se
descomponen en dos planos mutuamente perpendiculares, generalmente conocidos
como planos ZX y ZY, en los cuales son determinados los momentos flectores Mx y
My. Con el objetivo de hallar el momento resultante, los momentos de flexión en los
planos mutuamente perpendiculares se suman vectorialmente como:
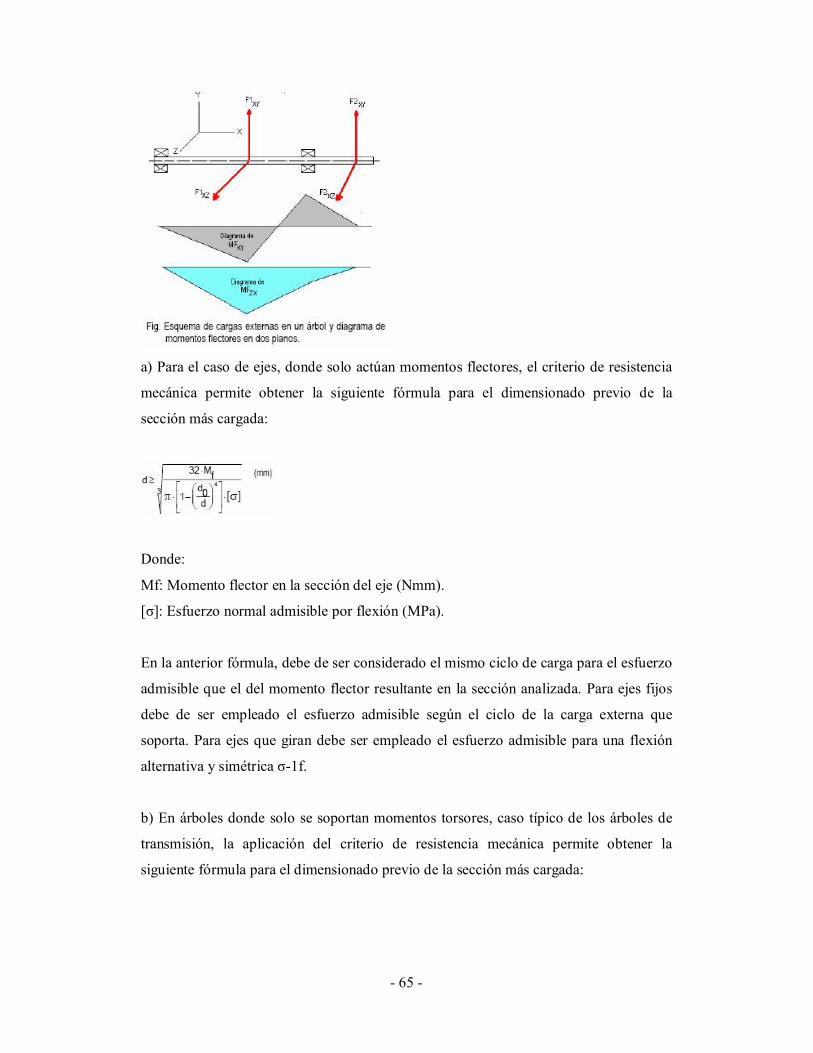
65
a) Para el caso de ejes, donde solo actúan momentos flectores, el criterio de resistencia
mecánica permite obtener la siguiente fórmula para el dimensionado previo de la
sección más cargada:
Donde:
Mf: Momento flector en la sección del eje (Nmm).
[σ]: Esfuerzo normal admisible por flexión (MPa).
En la anterior fórmula, debe de ser considerado el mismo ciclo de carga para el esfuerzo
admisible que el del momento flector resultante en la sección analizada. Para ejes fijos
debe de ser empleado el esfuerzo admisible según el ciclo de la carga externa que
soporta. Para ejes que giran debe ser empleado el esfuerzo admisible para una flexión
alternativa y simétrica σ1f.
b) En árboles donde solo se soportan momentos torsores, caso típico de los árboles de
transmisión, la aplicación del criterio de resistencia mecánica permite obtener la
siguiente fórmula para el dimensionado previo de la sección más cargada:

66
Donde:
MF: Momento flector en la sección del eje (Nmm)
[τ]: Esfuerzo tangencial admisible por torsión (MPa).
Debe de ser considerado el mismo ciclo de carga para el esfuerzo admisible que el del
momento torsor en la sección analizada.
c) Los casos de árboles sometidos a un estado tensional simple son menos frecuentes en
la práctica, pues usualmente los árboles están sometidos a esfuerzos normales y
tangenciales, provocados principalmente por una actuación combinada de momentos
flectores y torsores en la sección analizada. Aunque para el análisis del efecto de los
esfuerzos combinados en la resistencia del material existen varios criterios, de ellos, los
más empleados son los establecidos por la Hipótesis de la Tensión Tangencial Máxima
(Mohr, Guest, Coulomb) y la Hipótesis del Trabajo Específico de la Deformación de las
Tensiones Tangenciales (Mises, Huber y Hencky).
Las pruebas demuestran que estas hipótesis ofrecen valores prácticamente aceptables
para los árboles de acero que soportan momentos flectores y torsores.
Criterio de Resistencia de Mohr
Criterio de Resistencia de Von Mises
En el caso de una sección circular, puede ser calculado un momento flector equivalente,
según los dos criterios anteriores y ser obtenido un diámetro previo para la sección
analizada.
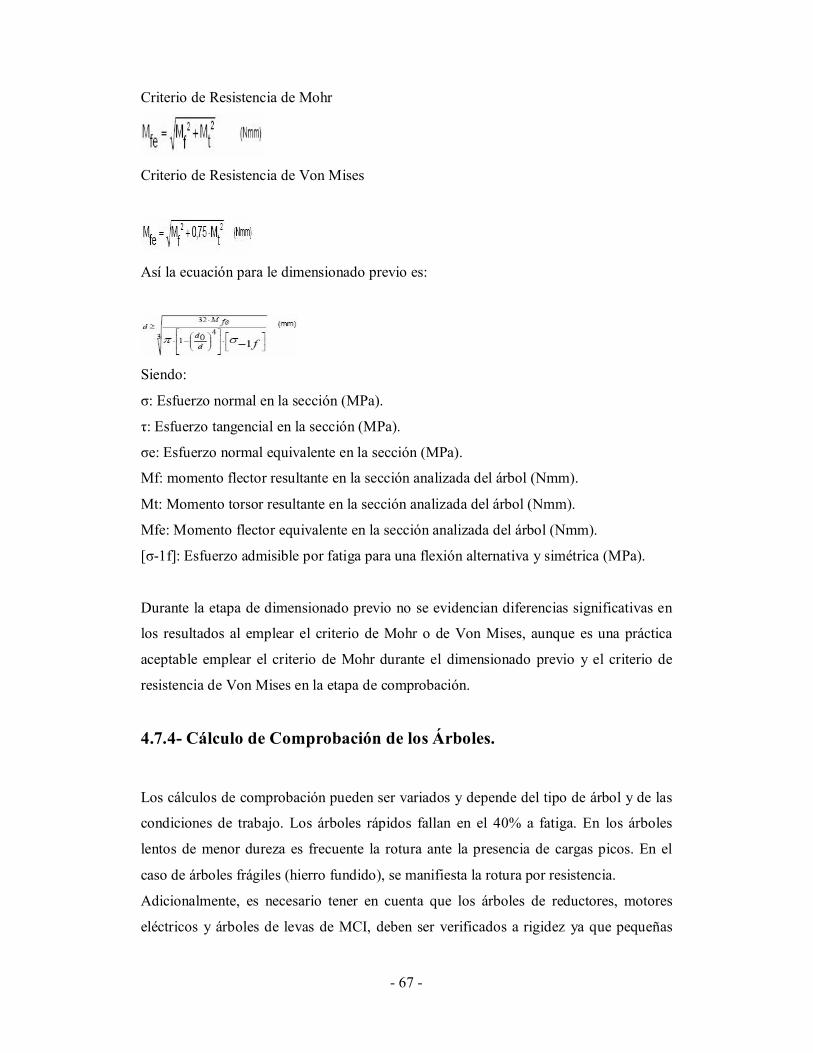
67
Criterio de Resistencia de Mohr
Criterio de Resistencia de Von Mises
Así la ecuación para le dimensionado previo es:
Siendo:
σ: Esfuerzo normal en la sección (MPa).
τ: Esfuerzo tangencial en la sección (MPa).
σe: Esfuerzo normal equivalente en la sección (MPa).
Mf: momento flector resultante en la sección analizada del árbol (Nmm).
Mt: Momento torsor resultante en la sección analizada del árbol (Nmm).
Mfe: Momento flector equivalente en la sección analizada del árbol (Nmm).
[σ1f]: Esfuerzo admisible por fatiga para una flexión alternativa y simétrica (MPa).
Durante la etapa de dimensionado previo no se evidencian diferencias significativas en
los resultados al emplear el criterio de Mohr o de Von Mises, aunque es una práctica
aceptable emplear el criterio de Mohr durante el dimensionado previo y el criterio de
resistencia de Von Mises en la etapa de comprobación.
4.7.4 Cálculo de Comprobación de los Árboles.
Los cálculos de comprobación pueden ser variados y depende del tipo de árbol y de las
condiciones de trabajo. Los árboles rápidos fallan en el 40% a fatiga. En los árboles
lentos de menor dureza es frecuente la rotura ante la presencia de cargas picos. En el
caso de árboles frágiles (hierro fundido), se manifiesta la rotura por resistencia.
Adicionalmente, es necesario tener en cuenta que los árboles de reductores, motores
eléctricos y árboles de levas de MCI, deben ser verificados a rigidez ya que pequeñas
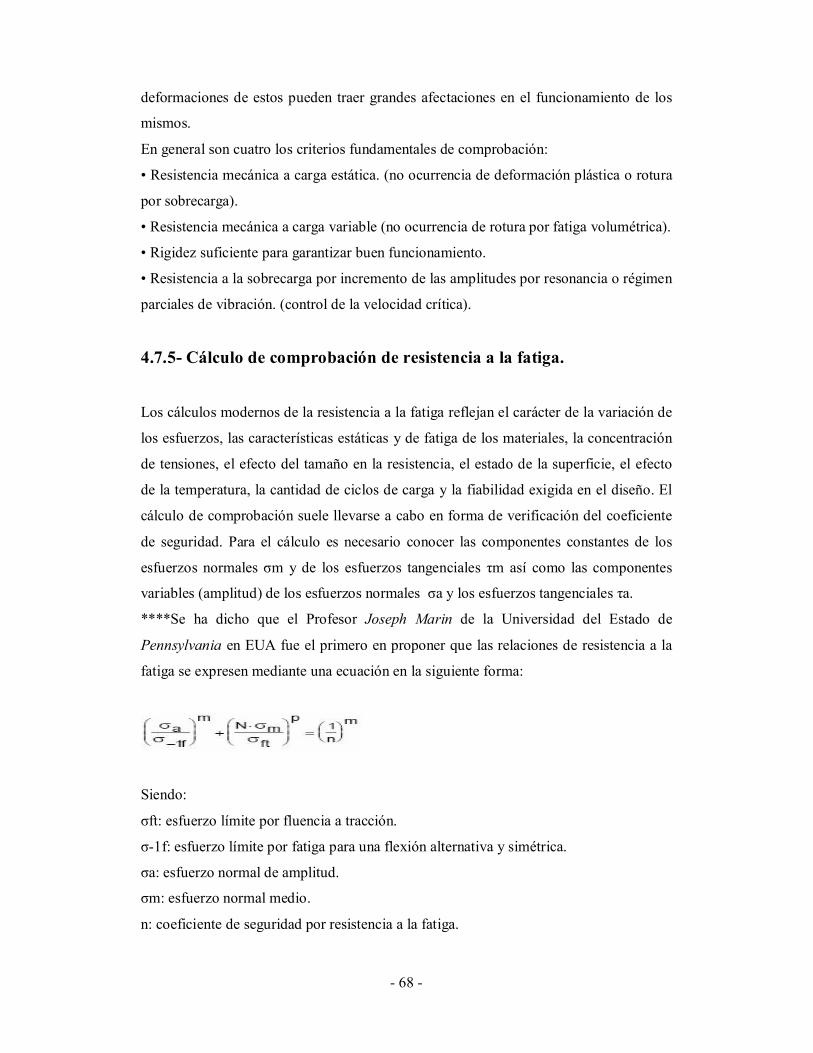
68
deformaciones de estos pueden traer grandes afectaciones en el funcionamiento de los
mismos.
En general son cuatro los criterios fundamentales de comprobación:
• Resistencia mecánica a carga estática. (no ocurrencia de deformación plástica o rotura
por sobrecarga).
• Resistencia mecánica a carga variable (no ocurrencia de rotura por fatiga volumétrica).
• Rigidez suficiente para garantizar buen funcionamiento.
• Resistencia a la sobrecarga por incremento de las amplitudes por resonancia o régimen
parciales de vibración. (control de la velocidad crítica).
4.7.5 Cálculo de comprobación de resistencia a la fatiga.
Los cálculos modernos de la resistencia a la fatiga reflejan el carácter de la variación de
los esfuerzos, las características estáticas y de fatiga de los materiales, la concentración
de tensiones, el efecto del tamaño en la resistencia, el estado de la superficie, el efecto
de la temperatura, la cantidad de ciclos de carga y la fiabilidad exigida en el diseño. El
cálculo de comprobación suele llevarse a cabo en forma de verificación del coeficiente
de seguridad. Para el cálculo es necesario conocer las componentes constantes de los
esfuerzos normales σm y de los esfuerzos tangenciales τm así como las componentes
variables (amplitud) de los esfuerzos normales σa y los esfuerzos tangenciales τa.
****Se ha dicho que el Profesor Joseph Marin de la Universidad del Estado de
Pennsylvania en EUA fue el primero en proponer que las relaciones de resistencia a la
fatiga se expresen mediante una ecuación en la siguiente forma:
Siendo:
σft: esfuerzo límite por fluencia a tracción.
σ1f: esfuerzo límite por fatiga para una flexión alternativa y simétrica.
σa: esfuerzo normal de amplitud.
σm: esfuerzo normal medio.
n: coeficiente de seguridad por resistencia a la fatiga.
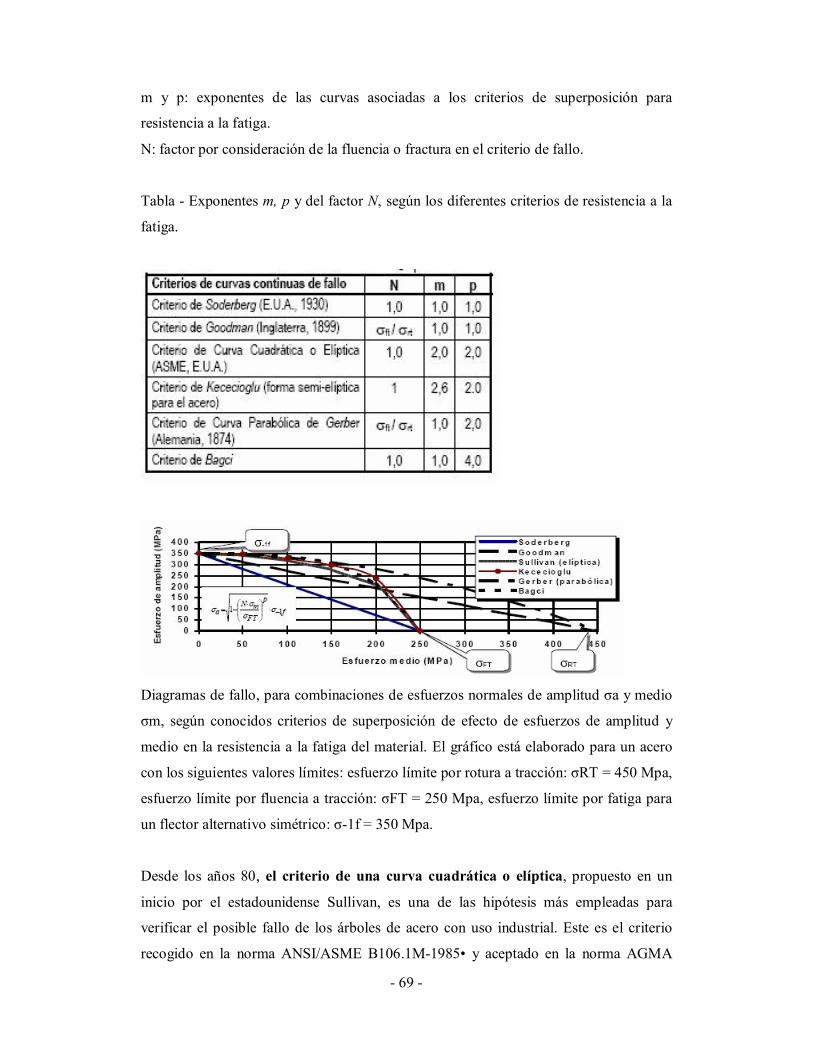
69
m y p: exponentes de las curvas asociadas a los criterios de superposición para
resistencia a la fatiga.
N: factor por consideración de la fluencia o fractura en el criterio de fallo.
Tabla Exponentes m, p y del factor N, según los diferentes criterios de resistencia a la
fatiga.
Diagramas de fallo, para combinaciones de esfuerzos normales de amplitud σa y medio
σm, según conocidos criterios de superposición de efecto de esfuerzos de amplitud y
medio en la resistencia a la fatiga del material. El gráfico está elaborado para un acero
con los siguientes valores límites: esfuerzo límite por rotura a tracción: σRT = 450 Mpa,
esfuerzo límite por fluencia a tracción: σFT = 250 Mpa, esfuerzo límite por fatiga para
un flector alternativo simétrico: σ1f = 350 Mpa.
Desde los años 80, el criterio de una curva cuadrática o elíptica, propuesto en un
inicio por el estadounidense Sullivan, es una de las hipótesis más empleadas para
verificar el posible fallo de los árboles de acero con uso industrial. Este es el criterio
recogido en la norma ANSI/ASME B106.1M1985• y aceptado en la norma AGMA
70
6001D97 para el cálculo de comprobación de árboles de transmisión. Por tales
motivos, este será el criterio que proponemos para que los estudiantes empleen en
el cálculo y diseño del reductor.
4.7.6 Cálculo de Comprobación Según Norma ASME B106. La referida norma establece que el cálculo de resistencia a la fatiga sea verificado
según:
Esta relación nos permite determinar el coeficiente de seguridad a la fatiga del material
del árbol, en la sección analizada, empleando la siguiente ecuación:
Donde:
σae: esfuerzo de amplitud equivalente según criterio de Von Mises. (MPa)
σme: esfuerzo medio equivalente según criterio de Von Mises. (MPa)
K: coeficiente modificador de la resistencia a la fatiga.
Los valores del esfuerzo límite por fatiga para un flector alternativo σ1f y del esfuerzo
límite por fluencia a tracción σft deben ser precisados para el material del árbol. En caso
de árboles de acero, cuando sean desconocidos estos valores (o no se desee emplear la
tabla 2), ellos pueden ser estimados según las siguientes relaciones, donde HB
representa la dureza en Grados Brinell del núcleo de la sección analizada.
En caso de: σrt ≤ 1389 Mpa, entonces debe ser empleado:
En caso de: σrt > 1389 Mpa, entonces debe ser empleado:
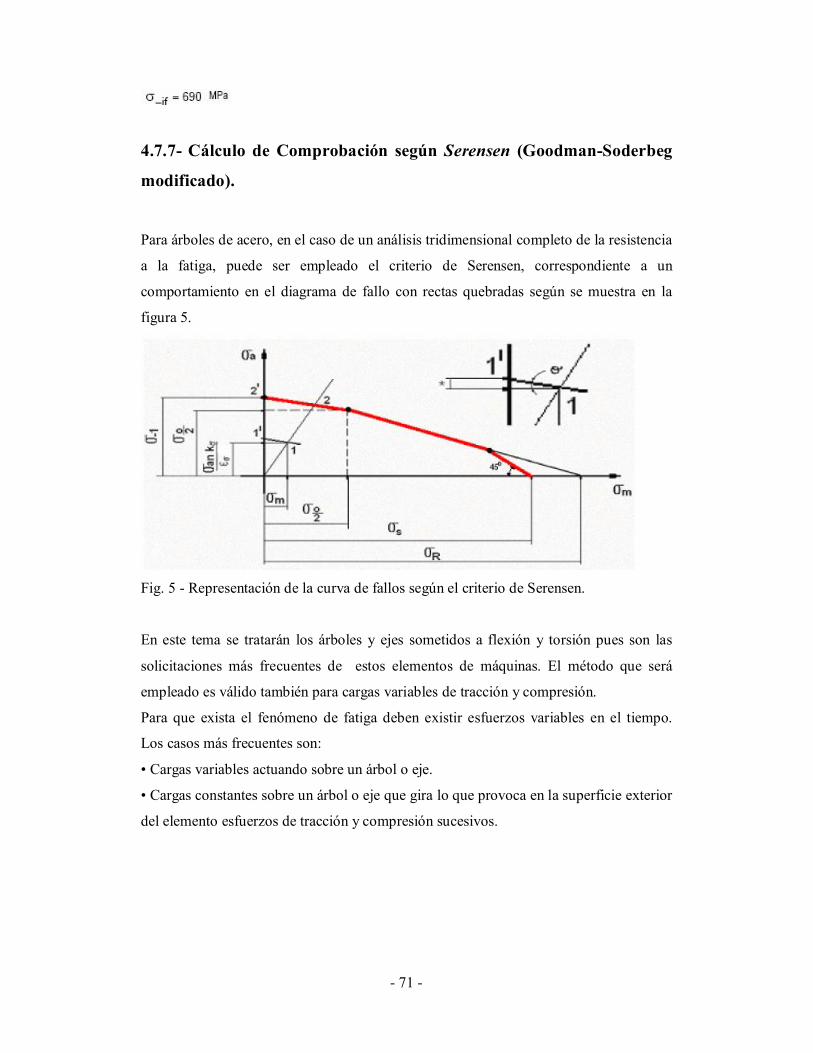
71
4.7.7 Cálculo de Comprobación según Serensen (GoodmanSoderbeg
modificado).
Para árboles de acero, en el caso de un análisis tridimensional completo de la resistencia
a la fatiga, puede ser empleado el criterio de Serensen, correspondiente a un
comportamiento en el diagrama de fallo con rectas quebradas según se muestra en la
figura 5.
Fig. 5 Representación de la curva de fallos según el criterio de Serensen.
En este tema se tratarán los árboles y ejes sometidos a flexión y torsión pues son las
solicitaciones más frecuentes de estos elementos de máquinas. El método que será
empleado es válido también para cargas variables de tracción y compresión.
Para que exista el fenómeno de fatiga deben existir esfuerzos variables en el tiempo.
Los casos más frecuentes son:
• Cargas variables actuando sobre un árbol o eje.
• Cargas constantes sobre un árbol o eje que gira lo que provoca en la superficie exterior
del elemento esfuerzos de tracción y compresión sucesivos.
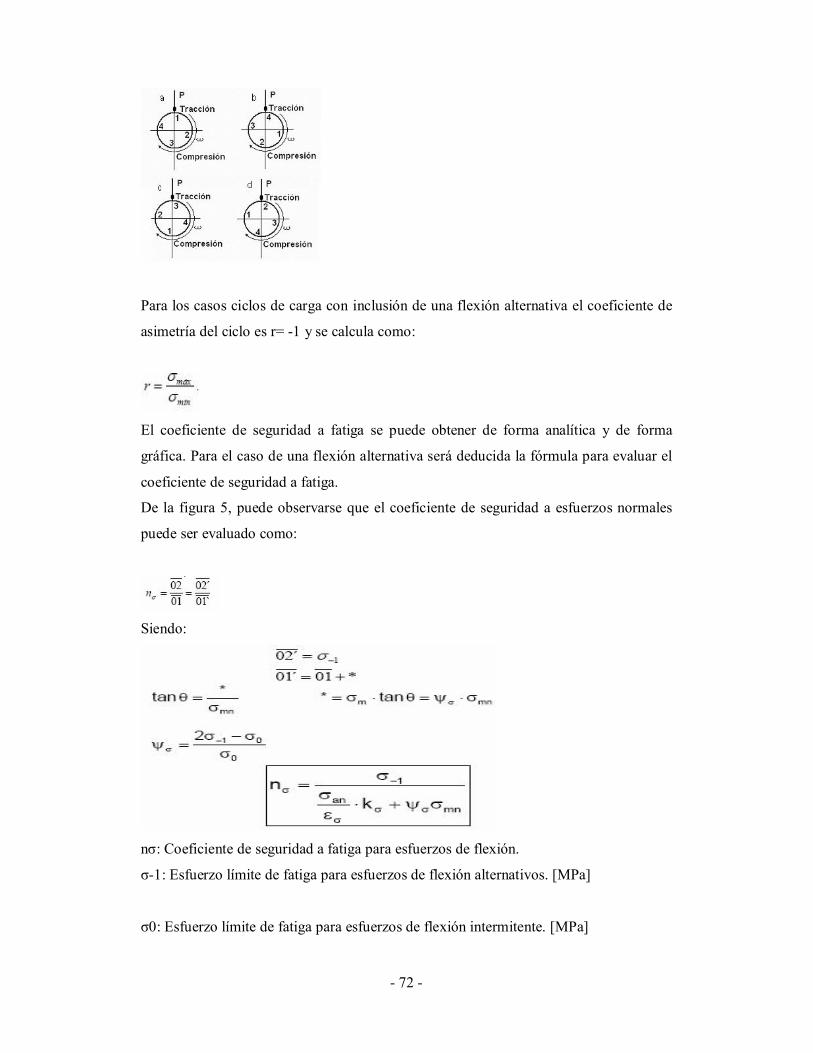
72
Para los casos ciclos de carga con inclusión de una flexión alternativa el coeficiente de
asimetría del ciclo es r= 1 y se calcula como:
El coeficiente de seguridad a fatiga se puede obtener de forma analítica y de forma
gráfica. Para el caso de una flexión alternativa será deducida la fórmula para evaluar el
coeficiente de seguridad a fatiga.
De la figura 5, puede observarse que el coeficiente de seguridad a esfuerzos normales
puede ser evaluado como:
Siendo:
nσ: Coeficiente de seguridad a fatiga para esfuerzos de flexión.
σ1: Esfuerzo límite de fatiga para esfuerzos de flexión alternativos. [MPa]
σ0: Esfuerzo límite de fatiga para esfuerzos de flexión intermitente. [MPa]

73
Ψσ: Coeficiente sensibilidad del material a la asimetría del ciclo para esfuerzos de
flexión.
σmn: Esfuerzo medio nominal de flexión. [MPa]
σan: Esfuerzo de amplitud nominal a flexión. [MPa]
Como se observa en la expresión del cálculo del coeficiente de seguridad, el esfuerzo de
amplitud a la flexión nominal se modifica por un grupo de coeficientes:
Los coeficientes incluidos en el anterior término ajustan el valor del esfuerzo de
amplitud nominal a flexión en función de las características de la superficie del material,
el coeficiente de tamaño (1/εσ) y del coeficiente de entalladura (kσ).
En el caso de esfuerzos tangenciales variables, el cálculo del coeficiente de seguridad a
fatiga por esfuerzos de torsión de una sección de un árbol o eje se efectúa de forma
semejante como:
Siendo:
nτ: Coeficiente de seguridad a fatiga por torsión.
τ1: Esfuerzo límite de fatiga por torsión alternativa. [MPa]
τ0: Esfuerzo límite de fatiga por torsión intermitente. [MPa]
Ψτ: Coeficiente de sensibilidad del material a la asimetría del ciclo para esfuerzos
tangenciales.
τm: Esfuerzo medio nominal de torsión. [MPa]
τan: Esfuerzo de amplitud nominal a torsión. [MPa] Como en el caso de esfuerzos de
flexión, el esfuerzo de amplitud a la torsión se modifica por un grupo de coeficientes:
Estos coeficientes ajustan el valor del esfuerzo de amplitud a torsión en función del
coeficiente de tamaño (1/ετ) y del coeficiente de entalladura (kτ).

74
Si se da la combinación de cargas variables por esfuerzos de flexión y esfuerzos por
torsión se plantea:
Siendo:
neq: Coeficiente de seguridad a fatiga equivalente.
El tamaño de las piezas a comprobar influye en la resistencia de estas a la fatiga ya que
para mayores dimensiones de la sección las probabilidades de la existencia de fallas en
el material aumentan, el coeficiente de tamaño (1/ε) depende también del coeficiente de
forma en la entalladura (αk), y del límite de resistencia del material a la fatiga por
flexión alternativa, tanto cuando se realicen cálculos de comprobación a esfuerzos
normales como a tangenciales.
El coeficiente de entalladura (Kσ, kτ) tiene en cuenta los efectos del coeficiente de
concentración de la carga por la forma (Kσk, Kτk) y del coeficiente de concentración de
la carga por el estado de la superficie (Kσs, Kτs.).
El coeficiente de concentración de la carga por la forma (Kσk, Kτk), depende de la
geometría de la sección y la solicitación en la resistencia de esta a la fatiga, por medio
del coeficiente de forma en la entalladura (αk). Este coeficiente (αk) refleja con claridad
el aumento de la resistencia, por ejemplo, para aumentos de radios de redondeo, y la
diferencia entre el comportamiento de la resistencia de una sección para diferentes tipos
de solicitaciones de carga. En resumen Kσk, Kτk se obtienen en función del coeficiente
de forma, el tratamiento térmico, y para ambos casos (flexión y torsión) toman en
cuenta el esfuerzo límite a fatiga a la flexión alternativa.
Los coeficientes de concentración de la carga por estado de la superficie. Kσs, Kτs.
Reflejan la influencia de esta en la resistencia a la fatiga. Se determina en función del
esfuerzo límite de rotura, y la rugosidad superficial, su valor numérico es diferente para
las cargas de flexión y torsión.
El coeficiente de entalladura (Kσ, kτ) se calcula como:
Para comprobar un árbol o eje a fatiga se puede adoptar la siguiente propuesta de
secuencia de cálculo.
75
a) Determinar las cargas que actúan sobre el elemento. Construcción de los gráficos de
momento torsor y flector.
b) Definir el carácter de las cargas que actúan. Tipo de ciclo. (Constante, alternativo o
intermitente).
c) Selección de las secciones a comprobar.
d) Cálculo de los esfuerzos que actúan en la sección.
e) Determinación de los coeficientes modificadores.
Para la obtención de los coeficientes de entalladura Kσ, Kτ:
1. Determinación del radio límite. ρ
Se obtiene en función del radio geométrico y la línea de esfuerzos.
ρk Radio geométrico (radio de redondeo de la sección analizada en el plano).
ρm radio teórico en la línea de esfuerzo. (En función de el esfuerzo de rotura a la
tracción).
2. Determinar el coeficiente de forma en la entalladura αk, en función de la geometría la
carga que actúa y el radio límite.
3. Obtención de los coeficientes de concentración de la carga por forma.
Kσk, Kτk. En función del coeficiente de forma, el tratamiento térmico, y para ambos
casos del esfuerzo límite a fatiga a la flexión alternativa.
4. Obtención de los coeficientes de concentración de la carga por estado de la superficie.
Kσs, Kτs. En función del esfuerzo límite de rotura, y el estado de la superficie.
5. El coeficiente de entalladura (Kσ, kτ) se calcula como:
6. Obtención del coeficiente de tamaño 1/ε. Se busca su valor con σ1f, αk, las
dimensiones de la sección.

76
f) Cálculo de los coeficientes de seguridad.
A continuación es referido el resto de los parámetros de cálculo para una sección
circular:
σMf: esfuerzo normal por flexión.
τaMt: esfuerzo tangencial de amplitud por torsión.
Siendo:
τmMt: esfuerzo tangencial medio por torsión.
Siendo:
Donde:
Mta: momento torsor de amplitud. (Nmm)
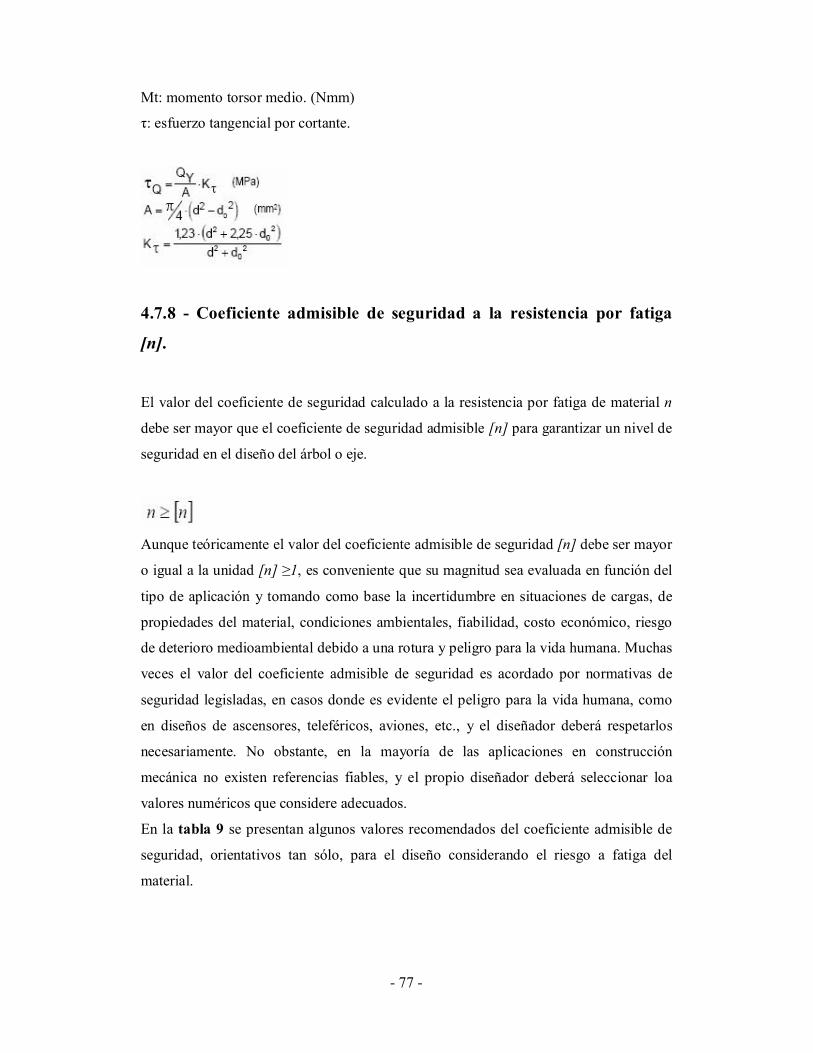
77
Mt: momento torsor medio. (Nmm)
τ: esfuerzo tangencial por cortante.
4.7.8 Coeficiente admisible de seguridad a la resistencia por fatiga
[n].
El valor del coeficiente de seguridad calculado a la resistencia por fatiga de material n
debe ser mayor que el coeficiente de seguridad admisible [n] para garantizar un nivel de
seguridad en el diseño del árbol o eje.
Aunque teóricamente el valor del coeficiente admisible de seguridad [n] debe ser mayor
o igual a la unidad [n] ≥1, es conveniente que su magnitud sea evaluada en función del
tipo de aplicación y tomando como base la incertidumbre en situaciones de cargas, de
propiedades del material, condiciones ambientales, fiabilidad, costo económico, riesgo
de deterioro medioambiental debido a una rotura y peligro para la vida humana. Muchas
veces el valor del coeficiente admisible de seguridad es acordado por normativas de
seguridad legisladas, en casos donde es evidente el peligro para la vida humana, como
en diseños de ascensores, teleféricos, aviones, etc., y el diseñador deberá respetarlos
necesariamente. No obstante, en la mayoría de las aplicaciones en construcción
mecánica no existen referencias fiables, y el propio diseñador deberá seleccionar loa
valores numéricos que considere adecuados.
En la tabla 9 se presentan algunos valores recomendados del coeficiente admisible de
seguridad, orientativos tan sólo, para el diseño considerando el riesgo a fatiga del
material.
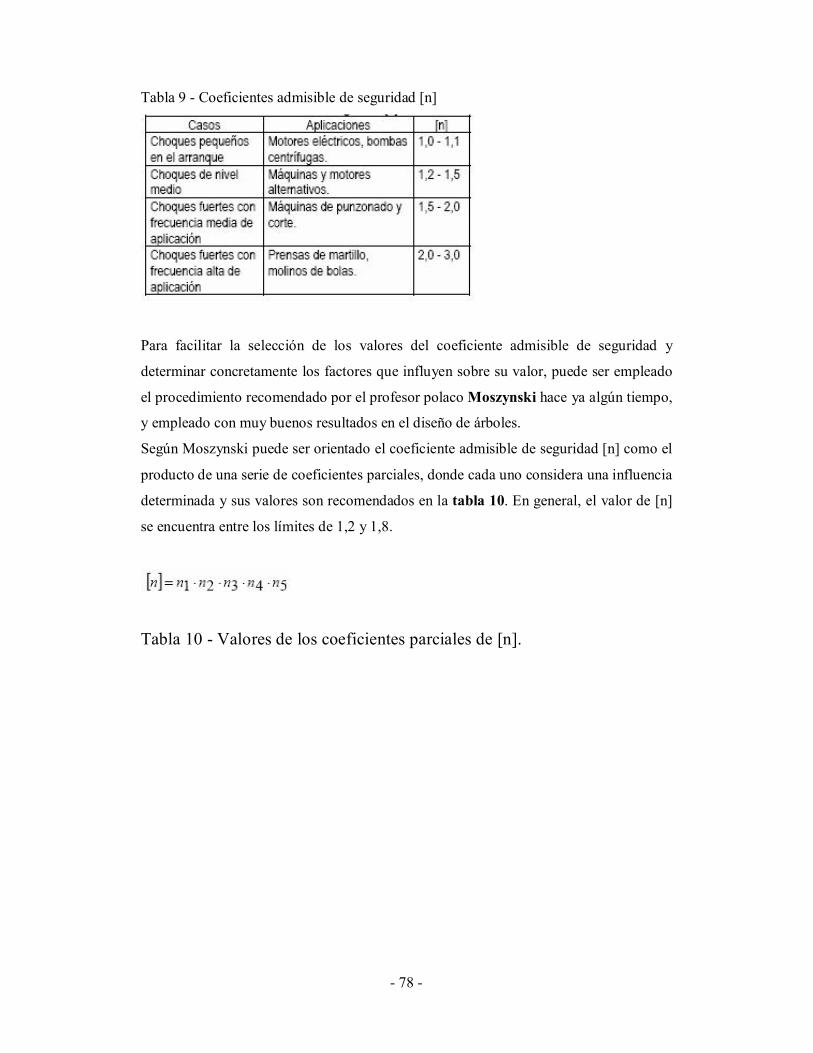
78
Tabla 9 Coeficientes admisible de seguridad [n]
Para facilitar la selección de los valores del coeficiente admisible de seguridad y
determinar concretamente los factores que influyen sobre su valor, puede ser empleado
el procedimiento recomendado por el profesor polaco Moszynski hace ya algún tiempo,
y empleado con muy buenos resultados en el diseño de árboles.
Según Moszynski puede ser orientado el coeficiente admisible de seguridad [n] como el
producto de una serie de coeficientes parciales, donde cada uno considera una influencia
determinada y sus valores son recomendados en la tabla 10. En general, el valor de [n]
se encuentra entre los límites de 1,2 y 1,8.
Tabla 10 Valores de los coeficientes parciales de [n].
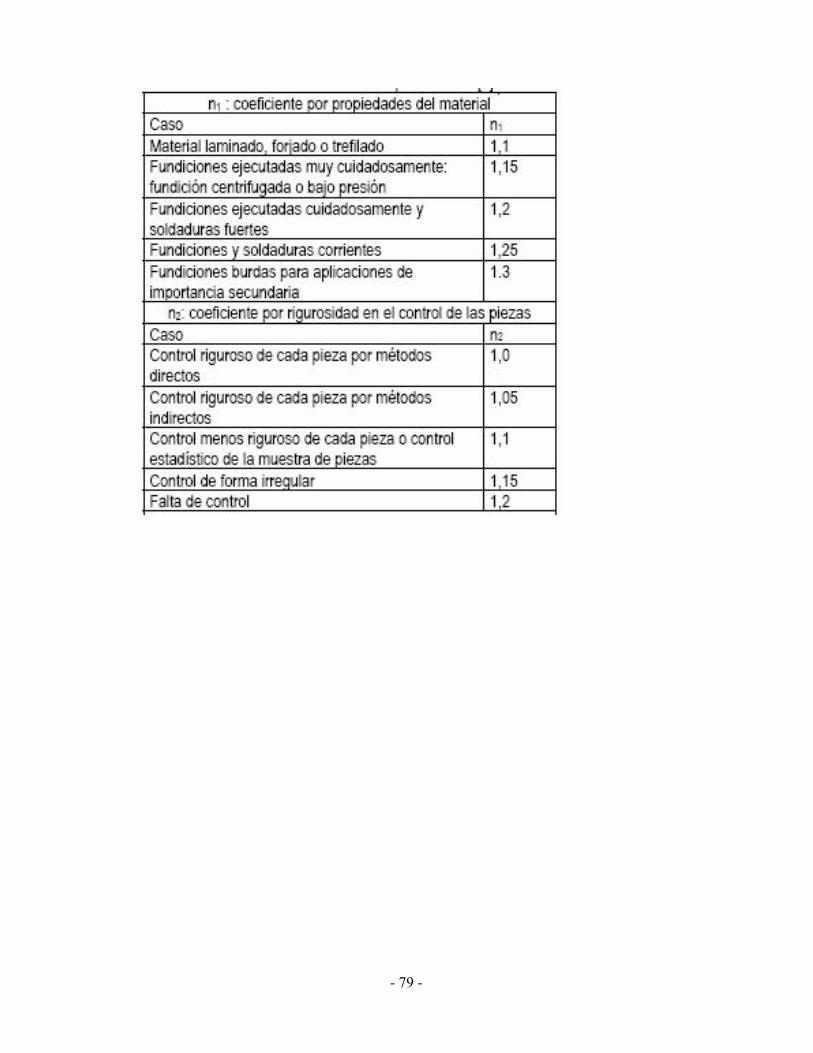
79
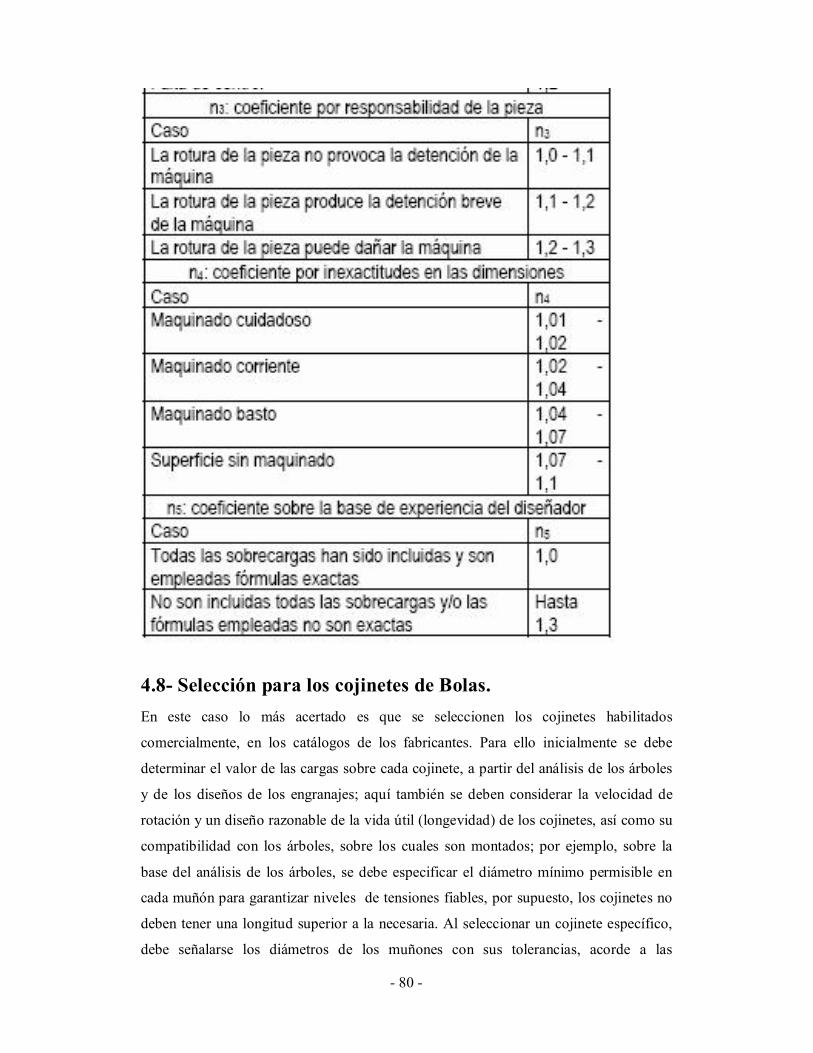
80
4.8 Selección para los cojinetes de Bolas. En este caso lo más acertado es que se seleccionen los cojinetes habilitados
comercialmente, en los catálogos de los fabricantes. Para ello inicialmente se debe
determinar el valor de las cargas sobre cada cojinete, a partir del análisis de los árboles
y de los diseños de los engranajes; aquí también se deben considerar la velocidad de
rotación y un diseño razonable de la vida útil (longevidad) de los cojinetes, así como su
compatibilidad con los árboles, sobre los cuales son montados; por ejemplo, sobre la
base del análisis de los árboles, se debe especificar el diámetro mínimo permisible en
cada muñón para garantizar niveles de tensiones fiables, por supuesto, los cojinetes no
deben tener una longitud superior a la necesaria. Al seleccionar un cojinete específico,
debe señalarse los diámetros de los muñones con sus tolerancias, acorde a las

81
recomendaciones de los fabricantes para alcanzar el funcionamiento adecuado de los
cojinetes con su expectativa de vida (longevidad).
Secuencia que se utiliza para la selección del cojinete de rodamiento.
1. Calcular la capacidad dinámica de carga
P L C P nec ∗ =
2. Seleccionar un rodamiento con
nec C C ≥ 3. Para el rodamiento seleccionado hallar la relación
e C F a = 0
4. Determinar (X) y (Y) según sea r
a
F F
5. Determinar la carga radial equivalente (P)
a r F y F x P ∗ + ∗ = 6. Calcular la capacidad dinámica de carga
P L C P nec ∗ =
7. Designación y dimensión
Datos del rodamiento si se cumple nec C C ≥ 8. Duración real en horas del rodamiento
( ) 60
10 3 6
∗
∗ =
n P
C L h
9. Determinar las dimensiones para el montaje
r D Da nim ∗ − = 4
r d da nim ∗ + = 4
10. Determinar los ajustes y tolerancias del eje
Carácter de la carga
Tipo de rodamiento
Diámetro del eje
82
Coeficiente P C
4.8.1 Selección de tapas de rodamientos. Después de haber seleccionado adecuadamente el rodamiento en dependencia del
diámetro exterior se selecciona la tapa. Para fijar la disposición recíproca de los
elementos del conjunto, en dirección axial, para conservar dicha disposición en el
proceso de funcionamiento y de acción de las cargas axiales, los cojinetes se sujetan en
el árbol y en el cuerpo.
Las tapas cubiertas y cerradas traen un sello para evitar la entrada de polvo y
materias extrañas y retener el lubricante, el montaje de un cojinete debe incluir un sello.
Los tres tipos principales de sellado son con sello de fieltro, con sello comercial y con
sello de laberinto.
Los sellos de fieltro pueden usarse en la lubricación por grasa cuando las velocidades
son bajas. Las superficies en rote o frotamiento deben tener un alto pulimento. Los
sellos de fieltro deben protegerse contra el polvo y la suciedad colocándolos en ranuras
maquinadas o utilizando piezas estampadas de metal como broqueles o cubiertas.
El sello comercial es un dispositivo que consta del elemento de frotamiento y,
generalmente, un respaldo de resorte que está retenido por una cubierta de lámina
metálica. Estos sellos, por lo general, se colocan por ajuste a presión dentro de un hueco
ensanchado en la cubierta del cojinete. Puesto que desarrollan la acción de Sellado por
rote, no deben ser utilizados en aplicaciones de alta velocidad.
El sello de laberinto es especialmente eficaz para aplicaciones de alta velocidad y
puede emplearse con aceite o grasa. Algunas veces se usa con aditamentos. Por lo
menos deben emplearse tres ranuras y estas deben hacerse en el hueco del cojinete o en
su parte exterior. La holgura puede fluctuarse entre 0.010 y 0.040 in; según la velocidad
y la temperatura. [21]
4.9 Metodología y cálculo de los elementos de unión entre el
árbol y la rueda. Existen diferentes tipos de unión entre los árboles y las ruedas pero las de mayor
difusión son: las Chavetas y Las Estrías.

83
Las chavetas se utilizan para unir elementos que deben transmitir momento tórsor
aunque en ocasiones sirve a su vez de guía a los elementos que trabajan axialmente.En
orden continúa el diseño de las chavetas y chaveteros. El diámetro del árbol determina
en la chaveta sus dimensiones básicas (ancho y altura). El torque que puede ser
transmitido es usado en los cálculos de resistencia para determinar la longitud de la
chaveta y su material.
Las estrías se utilizan mayormente cuando el largo de la chaveta y el diámetro del
eje no se pueden variar y la transmisión por chaveta no soporta las cargas. En relación
con complejidad de los regímenes de carga y con el aumento de las exigencias a la
exactitud del movimiento de los elementos, han adquirido amplia difusión las uniones
dentadas (estrías).
4.9.1 Calculo de Chaveta prismática 1. Seleccionar los materiales de la chaveta y de la rueda – árbol.
Ver tabla 4.1 Pág. 85
T σ De la rueda árbol.
C σ De la chaveta.
2. Se realiza un Cálculo cortante.
[ ] c γ τ ≤ max
[ ] c l b d Mt γ ≤ ∗ ∗
∗ 2
3. Longitud de la chaveta.
[ ] c b d Mt l
γ ∗ ∗ ∗
≥ 2
4. Comprobación de la chaveta.
[ ] [ ] apl c σ γ 8 . 0 =
Calculo aplastamiento
1. Calculo aplastamiento
[ ] apl MAX apl σ σ ≤

84
[ ] apl l h d Mt σ ≤ ∗ ∗
∗ 4
2. Longitud de la chaveta
apl h d Mt l σ ∗ ∗
∗ ≥ 4
3. Comprobación de la chaveta.
[ ] [ ] T apl σ σ 2 =
[ ] apl σ
[ ] c γ Después de obtener la longitud de la chaveta si resulta mayor que la longitud del
cubo que se requiere acoplar, es necesario poner dos chavetas. Se debe hacer una
aclaración importante ya que al montar dos chavetas, estas deben montarse a 0 120 ó 0 180 nunca a 0 90 .
4.9.2 Calculo de estrías.
1. Selección del material y tratamiento térmico.
Ver Pág. 447
2. Cálculo del momento tórsor.
[ ] ψ σ ∗ ∗ ∗ ≤ R F M apl tor
l h z F ∗ ∗ =
4 a C d D
R +
= Para los dientes de cara laterales rectas.
2 2 z m d R
∗ = = Para los dientes de evolvente.
Donde:
F es la proyección de la superficie de contacto de la chaveta (diente) sobre su
plano diametral.
R el radio convencional de aplicación de la carga.
85
[ ] apl σ la tensión admisible de aplastamiento local.
ψ el coeficiente de la irregularidad de distribución de la carga en la. superficie
de contacto.
ψ =1 para las uniones por chaveta.
= ψ 0.7 – 0.8 para las uniones dentadas.
h es la altura de superficie de contacto de los dientes a conjugar, medida por el
radio.
3. Largo de la unión dentada.
[ ] apl
tor
R h z M
l σ ψ ∗ ∗ ∗ ∗
≥
4.10 Formas de lubricación de los reductores de velocidad. Los lubricantes permiten un buen funcionamiento mecánico al evitar la abrasión o
agarrotamiento de las piezas metálicas a consecuencia de la dilatación causada por el
calor. Un buen lubricante tiene que tener cuerpo, densidad , ser resistente a los ácidos
corrosivos, tener un grado de fluidez adecuado, presentar una resistencia mínima al
rozamiento y la tensión, así como unas elevadas temperaturas de combustión e
inflamación, y estar libre de oxidación o espesamiento. Hay pruebas químicas para
determinar todas estas propiedades en un lubricante.
Los engranajes y los rodamientos están lubricados por inmersión o salpique del
aceite alojado en la carcasa. Se debe revisar el nivel del aceite antes de poner en marcha
la unidad de reducción.
En la carcasa se encuentran los tapones de llenado, nivel y drenaje de aceite. El de
llenado posee un orificio de ventilación el cual debe permanecer limpio.
Los reductores tienen una placa de identificación, en la cual se describe el tipo de
lubricante a utilizar en condiciones normales de trabajo.
La lubricación consiste en interponer entre las superficies metálicas una delgada
película de aceite sobre la cual resbalan las mismas. Hay todavía rozamiento con
producción de calor, pero la temperatura y la fuerza absorbida no pasan de límites
tolerables. Los engranajes de los reductores se lubrican con aceite o simplemente se
sumergen los dientes de las ruedas en un baño de aceite. En los reductores existen
diferentes tipos de lubricación:
• la lubricación por inmersión
86
• la lubricación por chorro
• la lubricación por niebla.
La lubricación por inmersión:
Se puede aplicar a velocidades periféricas menores 12 = v m/s. a una velocidad
mayor, el aceite es lanzado por la fuerza centrifuga y el engranaje funciona con
insuficiencia de lubricante al mismo tiempo crece la resistencia al giro de las ruedas y
aumenta la temperatura del aceite se emplea en los reductores por tornillo sin fin en los
casos en que la velocidad periférica del tornillo alcanza 10 ≈ v m/s.
La profundidad de inmersión de las ruedas de gran velocidad debe ser de hasta 0.7 de
la altura del diente y no menos de mm 10 . Las ruedas de pequeña velocidad se deben
sumergir hasta mm 100 como máximo.
d i h P ∗ = 7 . 0
− i P Profundidad de inmersión de la rueda.
− d h Altura del diente.
La lubricación por chorro
Se aplica a velocidades periféricas de v >12 – 15 m/s y se lleva a cabo con el auxilio
de tuberías especiales, en las cuales el aceite se suministra por tuberías desde una
bomba. Este tipo de lubricación forzada requiere una construcción de la tuberías
especiales, a grandes velocidades ( v > 20 m/s) el aceite se entrega a los dientes de cada
rueda por separado, puesto que en caso contrario empeoran las condiciones de trabajo
del engranaje, el aceite se le suministra a la zona de engrane por el lado contrario a la
dirección del movimiento de los dientes en la zona de contacto.
La lubricación por niebla de aceite:
Para crear unas condiciones satisfactorias de lubricación mediante la niebla de aceite,
la armazón del reductor debe ser de pequeño volumen para que el espacio libre en el
interior del reductor no sea excesivo .el aceite salpica por medio de las ruedas que giran
o por medio de unas ruedas de paletas especiales.
La implementación de aceites sintéticos en equipos rotativos que han sido diseñados
para trabajar con aceites minerales es más compleja de lo que aparentemente parece; en
la mayoría de los casos los usuarios pasan por alto un buen número de detalles
importantes, que pueden conducir a corto ó a largo plazo a la falla del equipo rotativo ó
87
a que los resultados obtenidos no sean los esperados, generando frustraciones que con
llevan a que en el futuro no se vuelva a analizar la posibilidad de utilizar este tipo de
lubricantes. Por lo que el personal de operaciones que trabaja con los reductores debe
tener una capacitación necesaria sobre el buen uso de los aceites sintéticos y minerales,
y de los problemas que se pueden presentar en los reductores de velocidad si se mezcla
el aceite.
Quizás el aspecto más importante qué por lo regular no se tiene en cuenta es el de no
tener claro el porqué se desea utilizar un aceite sintético, verdaderamente esto obedece a
una necesidad ó a una simple curiosidad debido a que insistentemente hoy, más que en
ninguna otra época, se habla del tema como una alternativa para ampliar los cambios de
aceite en los equipos rotativos, proteger el ambiente por ser más biodegradables ó
reducir el consumo de energía por menor fricción al tener estos aceites un coeficiente de
fricción más bajos. Se pusieron avisos junto a los reductores de velocidad con la
leyenda, ADVERTENCIA: NO MEZCLAR EL ACEITE SINTÉTICO CON EL MINERAL YA
QUE SE PRODUCIRÁ LA FALLA CATASTRÓFICA DEL REDUCTOR DE VELOCIDAD.
4.11 Cálculo de los acoplamientos. La función de los acoplamientos es disminuir el momento de torsión entre árboles
que están situados uno a continuación de otro. Para el correcto funcionamiento del
acoplamiento no se permiten errores muy grandes en cuanto a la precisión y el montaje,
pues esto provoca cargas adicionales en el sistema. El tipo de acoplamiento se
selecciona teniendo en cuenta las funciones que realiza el mecanismo donde será
instalado. La mayoría de los acoplamientos tienen dos partes, una instalada en el árbol
motor y la otra en el movido. Para realizar una buena selección de los acoplamientos
debe incluir en todo caso una profunda valoración económica, pues se aprecian grandes
diferencias en el costo de obtención para los distintos tipos existentes.
4.11.1 Calculo de acoplamiento por engranajes El acoplamiento dentado: costa de los casquillos dentados y de los collares con
dentado interior. Los casquillos se asientan en los extremos de los árboles a empalmar.
Los collares están empernados entre si y engranados por toda la circunferencia con los
casquillos dentados. En los collares hay aceite. Durante la rotación del acoplamiento el
aceite es lanzado hacia la periferia, penetrando en los sitios de contacto. La lubricación

88
tiene una importancia sustancial para el buen trabajo del acoplamiento dentado.
Reduciendo el rozamiento entre los dientes disminuye la residencia al desplazamiento
relativo de los semicasquillos y la carga radial complementaria sobre los árboles y
cojinetes.
1. Elección del material y tratamiento térmico
Ver Pág. 461 y 362
2. Determinar el Angulo ψ de la dislocación admisible entre los ejes de los árboles
l sen
∆ =
Ψ 2
Donde:
∆ el intersticio lateral entre los dientes
b – la anchura de trabajo de los dientes
3. Determinar la magnitud del desplazamiento admisible de los centros
∆ ∗ = b l δ
Donde:
l – la distancia entre las mitades de los dientes en ambos casquillos si los valores
7 ≈ b l , 013 . 0 ≈
∆ b
y 5 . 1 1 . 0 − ≈ ∆ (en función del tamaño del acoplamiento), los
limites de los desplazamientos admisibles serán ( 5 . 10 7 . 0 − ≤ δ mm ), ´ 0 30 1 ≤ ψ
4.11.2 Calculo de acoplamiento elástico. Un motor y una maquina operadora o dos partes de transmisión unidas por medio de
un acoplamiento elástico componen un sistema oscilante que para la investigación
dinámica se cambia por el esquema simplísimo de dos masas, es decir, de dos discos
con momentos de inercia de la masa iguales a 2 1 Ι Ι e , correspondientemente, están
vinculados por el vástago imponderable con rigidez a la torsión c. Por cuanto la
maleabilidad torsora de acoplamiento elástico es considerablemente menor que la
maleabilidad de los árboles empleados, se puede considerar que c significa la rigidez del
sistema y la rigidez del acoplamiento al mismo tiempo.
1. Elección del material
Ver Pág. 465
2. Cálculo del momento.
89
= Mt ±Mo∗ µ ∗ Ι + Ι
Ι
2 1
2
1
1 2
−
=
p w
µ
2 1 Ι +
Ι = c c P
Donde: µ el coeficiente µ puede caracterizar la efectividad de aplicación del
acoplamiento elástico. Su valor depende en lo fundamental de la relación de las
frecuencias p w , donde w es la frecuencia del momento perturbador; p, la frecuencia
propia de las oscilaciones sin amortiguación. Si por ejemplo; ; 5 3 − = p w entonces
24 1
8 1
− = µ . Así pues, el acoplamiento elástico, al efectuar la elección correcta, es
un amortiguador efectivo de vibraciones.
P – la frecuencia propia de las oscilaciones sin amortiguación.
4.11.3 Calculo de acoplamiento de manguito. Es el más simple y consta de un casquillo de fundición o de acero asentado en los
extremos de los árboles y de unos pasadores cónicos que fijan el casquillo a los árboles,
más raramente, de chavetas.
En los casos de importancia los pasadores se comprueban al cizallamiento y al
aplastamiento. Habitualmente, las tensiones tangenciales en el material del pasador son
las más próximas a las rotura; por eso, si la sobrecarga en los acoplamientos de
manguito es considerable, con frecuencia se corta el pasador.
Las proporciones entre las dimensiones de los acoplamientos que responden a la
condición de igual resistencia de los elementos es:
a d l ∗ ≈ 3
a d e ∗ ≈ 4 3
90
a ext d D ∗ ≈ 5 . 1
( ) a pas d d ∗ = 25 . 0 ...... 3 . 0
En la última proporción se suele adoptar 0.3, para los acoplamientos pequeños y
0.25, para los grandes.
Donde:
l longitud del acoplamiento.
a d diámetro del árbol. e distancia del centro del pasador al extremo del casquillo.
ext D diámetro exterior del acoplamiento.
pas d diámetro del pasador.
Cálculo de comprobación al aplastamiento y cizallamiento de los pasadores.
El cálculo se realiza por el método de las secciones se determina el valor de la
tensión cortante, la cual se supone uniformemente distribuida sobre el área de
cizallamiento. A parte del cálculo por cortante es necesario realizar el cálculo por
aplastamiento (tensión local que produce en los elementos que se presionan uno
sobre el otro). Para simplificar los cálculos técnicos se admite
convencionalmente que la presión se distribuye uniformemente no sobre la
superficie de aplastamiento, sino sobre el área de aplastamiento, que es igual a la
proyección de la superficie de aplastamiento sobre el plano perpendicular a la
línea de acción de la fuerza P.
Cálculo a cortante.
b Mt P = [ ] [ ] t c σ τ ∗ = 6 . 0
[ ] c c τ τ ≤ [ ] [ ]t apl σ σ ∗ = 2
4
2 d P ∗
= π
τ
Cálculo a aplastamiento.

91
[ ] apl apl σ σ ≤
apl apl A
P = σ
( ) d b A apl − ∗ = δ
b Mt P =
Donde:
P – Fuerza
− Mt Momento torsor
− δ Espesor
b – brazo
d – diámetro del árbol
4.11.4 Calculo de acoplamiento de manguito partido. Este acoplamiento consta de dos mitades entre las cuales se aprietan con ayuda de
los pernos los extremos de los árboles a unir. Para disminuir la longitud de este
acoplamiento, los pernos se colocan uno con la cabeza hacia arriba y el siguiente hacia
abajo. La longitud de estos acoplamientos está relacionada con cantidad de pernos que
se utilicen.
( ) a d l ∗ ≈ 3 .... 4
( ) a ext d D ∗ ≈ 2 .... 4
Donde:
l longitud del acoplamiento.
ext D diámetro exterior del acoplamiento. En estas proporciones las cantidades mayores [4] se refieren a los acoplamientos de
pequeño tamaño, para los con mm d a 25 ≈ , los valores menores (3 y2) se refieren a
los acoplamientos mayores, para los árboles con mm d a 300 ≈ .
92
Los acoplamientos de manquito y manquito partido examinados, se unen con los
árboles después de colocar éstos en los cojinetes.
4.11.5 Metodología para calcular un reductor de velocidad
Calculo cinemático. Cálculo de los Engranajes. Cálculo de los árboles. Cálculo de los elementos de unión entre el árbol y la rueda. Selección de los cojinetes Selección de tapas de rodamientos Calculo de la carcasa Lubricación del reductor Calculo térmico (en caso necesario)
93
CONCLUSIONES Las variantes de diseño propuestas abarcan el sistema de habilidades de la asignatura
es decir identificar las funciones de diseño en la ingeniería, así como la determinación
de las principales dimensiones de los diferentes elementos de máquina y los parámetros
fundamentales para su selección.
La secuencia en que se desarrollan los cálculos de los elementos que componen un
reductor de velocidad, constituyen una guía para la realización del proyecto de la
asignatura por parte de los estudiantes del cuarto año de la carrera.
Es posible lograr el diseño de reductores mas compactos a partir de seleccionar los
datos de partida adecuados según las características del reductor a diseñar.
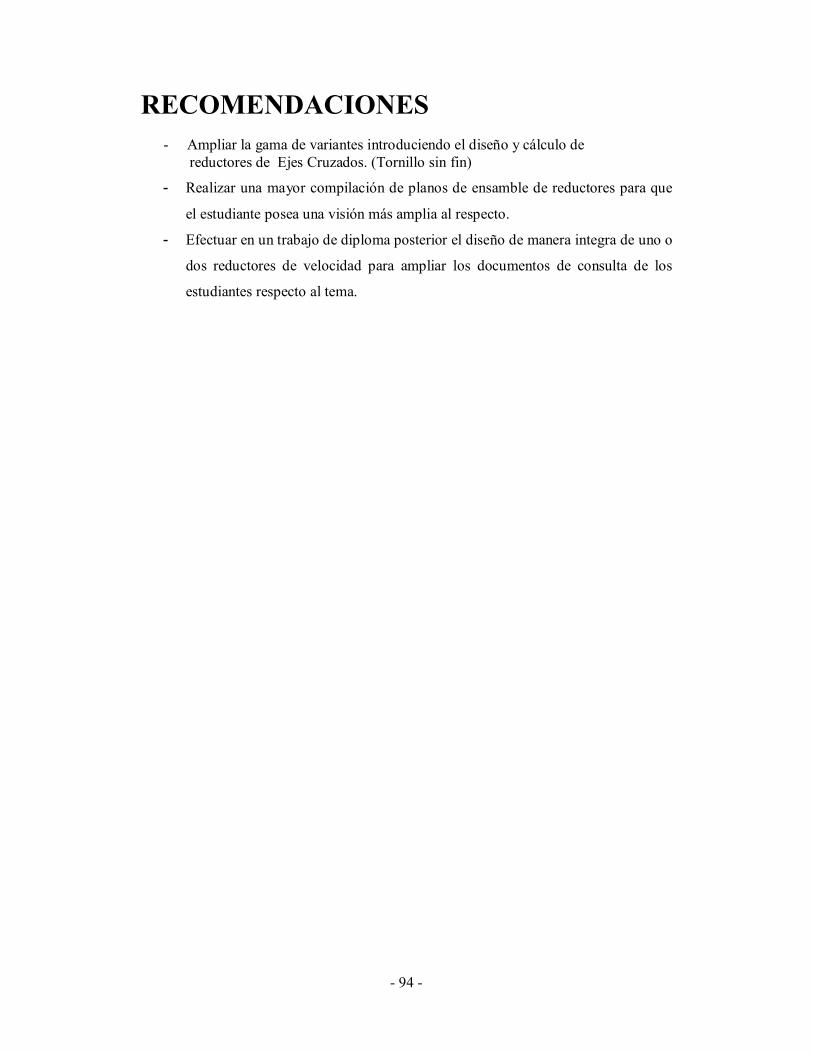
94
RECOMENDACIONES Ampliar la gama de variantes introduciendo el diseño y cálculo de
reductores de Ejes Cruzados. (Tornillo sin fin)
Realizar una mayor compilación de planos de ensamble de reductores para que
el estudiante posea una visión más amplia al respecto.
Efectuar en un trabajo de diploma posterior el diseño de manera integra de uno o
dos reductores de velocidad para ampliar los documentos de consulta de los
estudiantes respecto al tema.

95
BIBLIOGRAFIA
1. V. Dobrovolski. Elementos de Máquinas. Edit. MIR. 1980. 594 pp. 2. J. Shigley y C. Mischke. Diseño de Elementos de Máquina. Edit. McGraw Hill.
2003. 1257pp., 3. D. Reshetov. Elementos de Máquinas. Pueblo y Educación 1985. 830 pp. 4. J. M. Aneiros. Problemas de Diseño de Elementos de Máquinas (aparece
separado en dos partes). Pueblo y Educación 1986. 550 pp. 5. Colectivo de Autores. Manual Complementario de Elementos de Máquinas.
Pueblo y Educación 1986. 370 pp. 6. S/A. Atlas de Diseño de Elementos de Máquinas (aparece separado en dos
partes). Pueblo y Educación 1990. 302 pp. 7. FAG OEM und Handel AG. The Design of Rolling Bearing Mountings. Design
examples covering machines, Vehicles and Equipment. Publ. No. WL 00 200/5 EA. Germany. 2005.
8. Eschmann Hasbargen . Weigand. Ball and Roller Bearings. Theory, Design, and Application. Second Edition. PP. 484. Edit. John Wiley and Sons. 1985.
9. NTN Corporation. Ball and Roller Bearings. CAT. NO. 2202II/E. 2001 (Disponible en PDF en Internet). Tokio. Japan. 2001.
10. Bonfiglioli Riduttori. Parallel shaft gearbox series RAP. Technical catalogue. (Disponible en PDF en Internet).
11. Flender GMBH. Instrucciones de servicio de reductores Series H y B. (Disponible en PDF en Internet).
12. Boston Gear. Gearology (or Power Transmission 101). (Disponible en PDF en Internet). Mass. USA. 2007.
13. Gates Rubber Company. Belt Drive Preventive Maintenance & Safety Manual. Form, 14995 10/03. (Disponible en PDF en Internet).
Gates Rubber Company. Heavy Duty VB
14. Fernández, L. G. 1979, Resistencia de Materiales, Tomo I, Villa Clara, Septiembre. 15. Plan de Estudio D Para la carrera de Ingeniería Mecánica, Ministerio de Educación Superior.
96
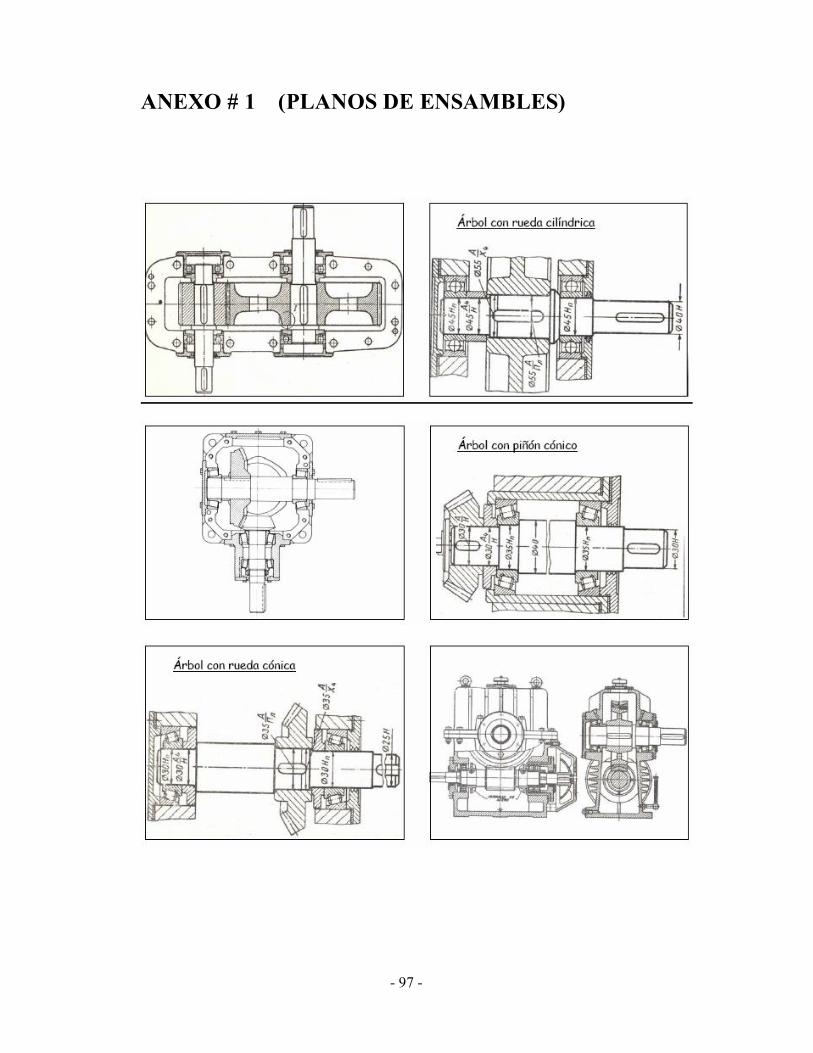
97
ANEXO # 1 (PLANOS DE ENSAMBLES)
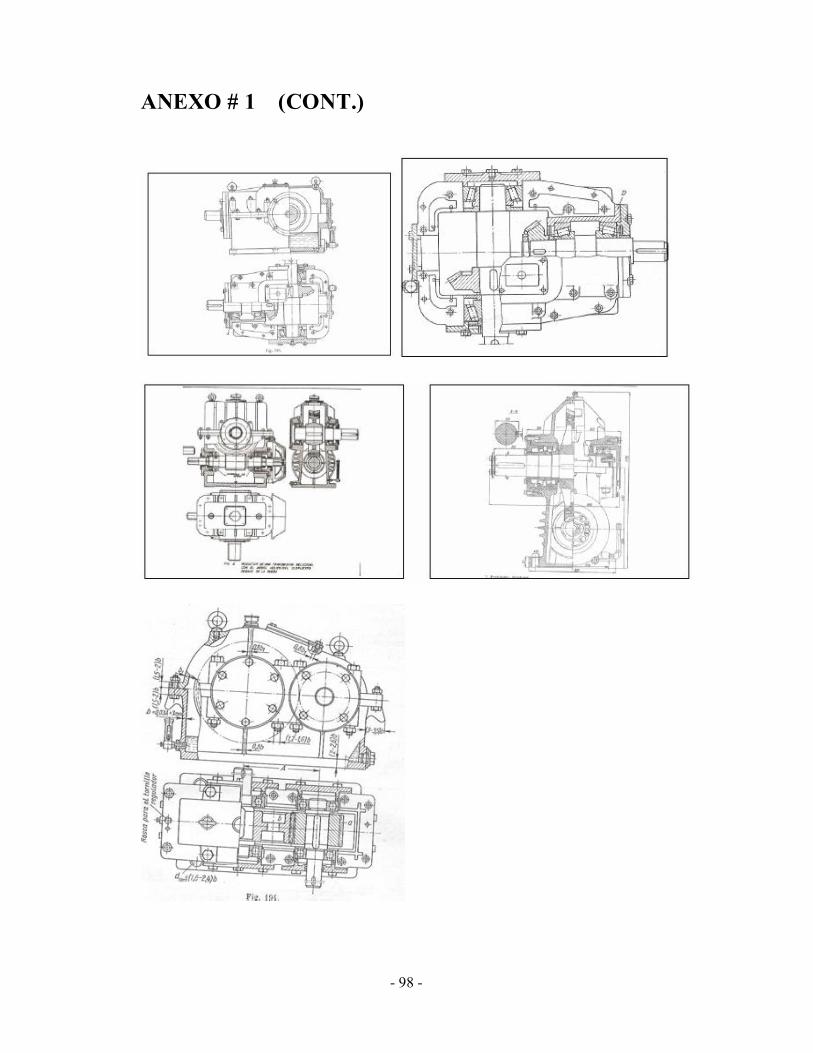
98
ANEXO # 1 (CONT.)
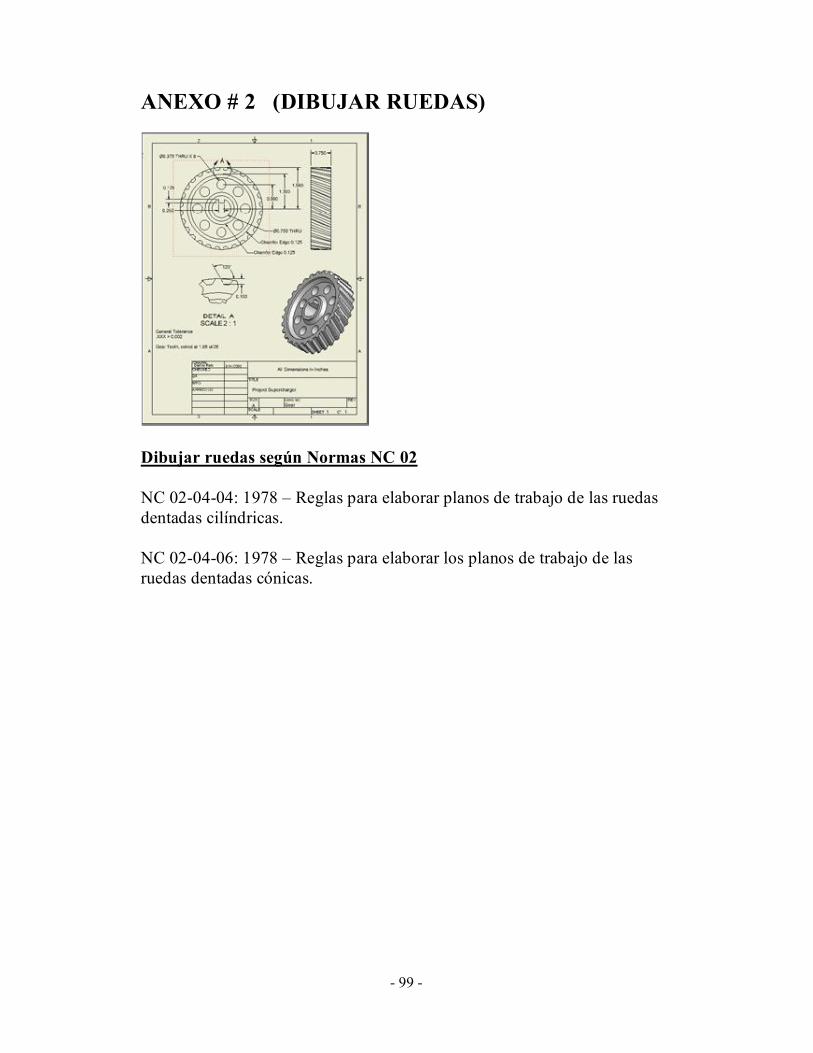
99
ANEXO # 2 (DIBUJAR RUEDAS)
Dibujar ruedas según Normas NC 02
NC 020404: 1978 – Reglas para elaborar planos de trabajo de las ruedas dentadas cilíndricas.
NC 020406: 1978 – Reglas para elaborar los planos de trabajo de las ruedas dentadas cónicas.
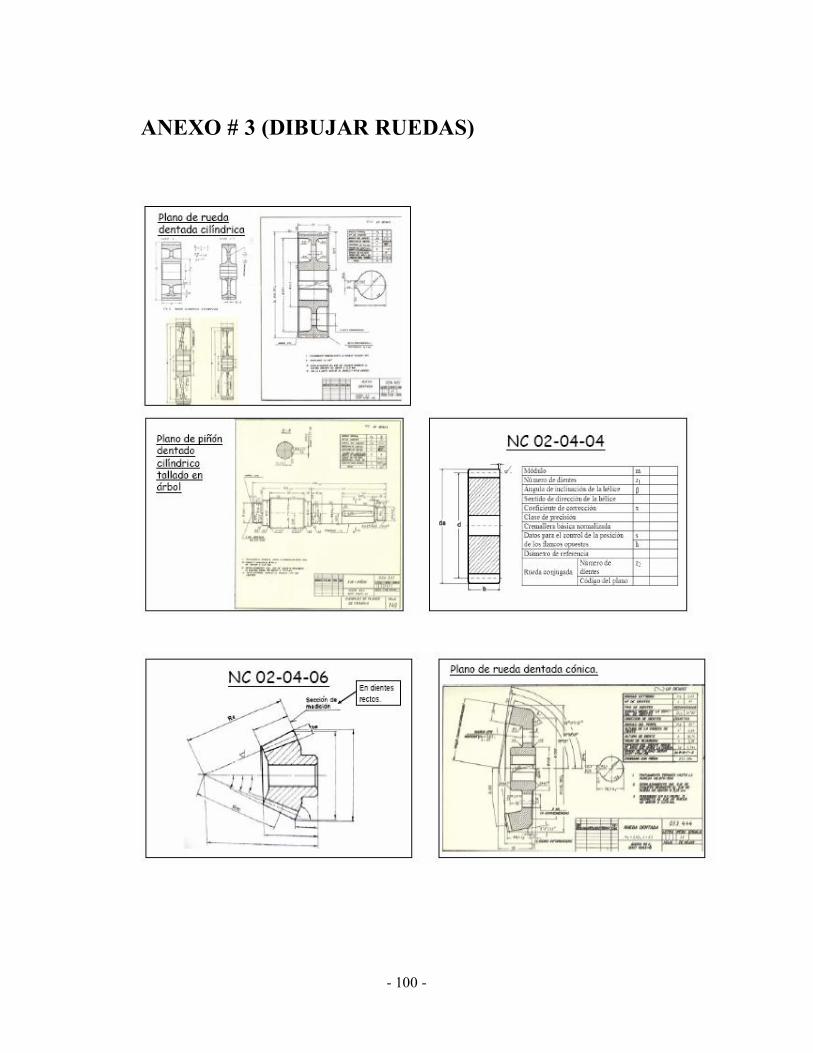
100
ANEXO # 3 (DIBUJAR RUEDAS)
101
ANEXO # 4 ( Normas)
NORMA CUBANA NC ISO 53: 2007 (Publicada por la ISO en 1998)
ENGRANAJES CILÍNDRICOS PARA LA INDUSTRIA GENERAL Y PESADA – PERFIL DEL DIENTE DE CREMALLERA BÁSICA DE REFERENCIA. (ISO 53: 1998, IDT) Cylindrical gears for general and heavy engineering — Standard basic rack tooth profile.
NORMA CUBANA NC ISO 54: 2007 (Publicada por la ISO en 1996) ENGRANAJES CILÍNDRICOS PARA LA INDUSTRIA GENERAL Y PESADA – MÓDULOS. (ISO 54: 1996, IDT) Cylindrical gears for general and heavy engineering — Modules. ICS: 21.200 1. Edición Noviembre 2007
NORMA CUBANA NC ISO 678: 2007 (Publicada por la ISO en 1976) ENGRANAJES CÓNICOS DE DIENTES RECTOS PARA LA INDUSTRIA GENERAL Y PESADA – MÓDULOS Y PASOS DIAMETRALES. (ISO 678: 1976, IDT) Straight bevel gears for general engineering and heavy engineering – Modules and diametral pitches. ICS: 621.833.2 1. Edición Noviembre 2007
NORMA CUBANA NC ISO 4183: 2008 (Publicada por la ISO en 1995) TRANSMISIONES POR CORREA – CORREAS CLÁSICAS Y ESTRECHAS – POLEAS RANURADAS (SISTEMA BASADO EN ANCHO DE REFERENCIA). (ISO 4183: 1995, IDT) ISO 4183:1995. Belt drives Classical and narrow vbelts grooved pulleys (system based on datum width). ICS: 621.85.051 1. Edición Abril 2008
102
ANEXO # 4 (continuación) NORMA CUBANA NC ISO 4184: 2008 (Publicada por la ISO en 1992) TRANSMISIONES POR CORREA – CORREAS CLÁSICAS Y ESTRECHAS – LONGITUDES. (ISO 4184: 1992, IDT) ISO 4184:1992. Belt drives Classical and narrow Vbelts Lengths in datumç system. ICS: 621.85.052 1. Edición Abril 2008


















