Tpf Tc1 Final
49
Universidad Católica Nuestra Señora de la Asunción Facultad de Ciencias y Tecnología Teoría de Circuitos 1 Sistema Mecánico – Eléctrico Profesor: Jean Guevara Alumnos: Carlos Cacavelos Néstor Valdez Año 2014
-
Upload
mohamed-hamdan -
Category
Documents
-
view
247 -
download
2
description
teoria de circuitos rlc conversion de sistema meacanico a sist electrico
Transcript of Tpf Tc1 Final
Universidad Católica Nuestra Señora de la
Asunción
Facultad de Ciencias y Tecnología
Teoría de Circuitos 1
Sistema Mecánico – Eléctrico
Profesor: Jean Guevara
Alumnos:
Carlos Cacavelos
Néstor Valdez
Año 2014
INTRODUCCION
En este documento desarrollaremos el análisis teórico de un circuito mecánico,
utilizando conceptos de física y de análisis de circuitos, podremos encontrar su
equivalente eléctrico.
Deduciremos fórmulas para concluir de que podemos encontrar el equivalente de este
tipo de circuito, analizaremos las respuestas de cada caso en el tiempo y el montaje del
circuito en el laboratorio para poder comparar con nuestros cálculos.
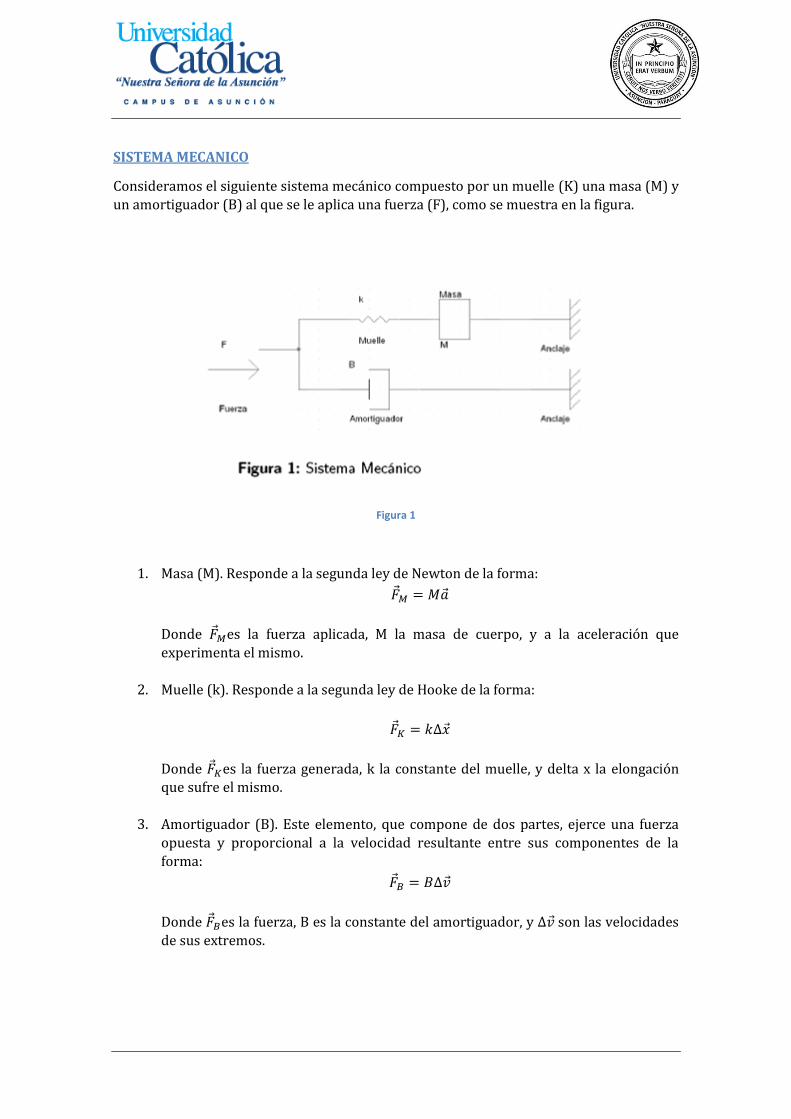
SISTEMA MECANICO
Consideramos el siguiente sistema mecánico compuesto por un muelle (K) una masa (M) y
un amortiguador (B) al que se le aplica una fuerza (F), como se muestra en la figura.
Figura 1
1. Masa (M). Responde a la segunda ley de Newton de la forma:
Donde es la fuerza aplicada, M la masa de cuerpo, y a la aceleración que
experimenta el mismo.
2. Muelle (k). Responde a la segunda ley de Hooke de la forma:
Donde es la fuerza generada, k la constante del muelle, y delta x la elongación
que sufre el mismo.
3. Amortiguador (B). Este elemento, que compone de dos partes, ejerce una fuerza
opuesta y proporcional a la velocidad resultante entre sus componentes de la
forma:
Donde es la fuerza, B es la constante del amortiguador, y son las velocidades
de sus extremos.
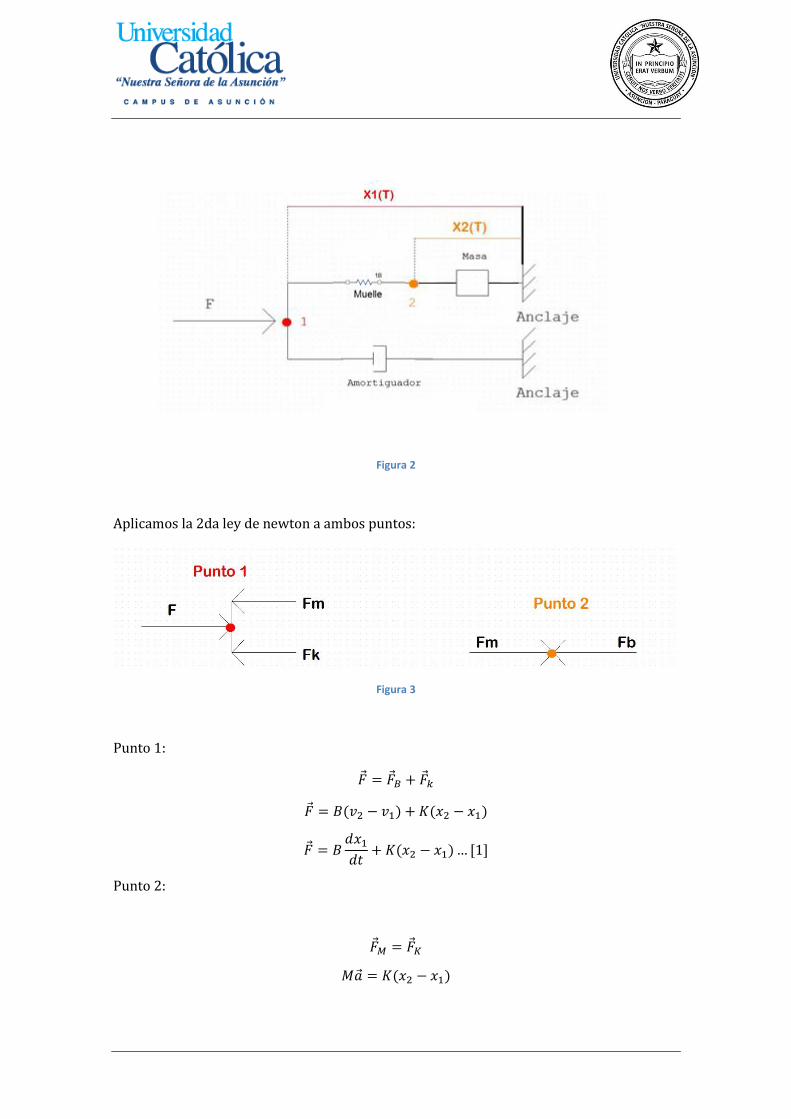
Figura 2
Aplicamos la 2da ley de newton a ambos puntos:
Figura 3
Punto 1:
Punto 2:

Las ecuaciones obtenidas muestran que la fuerza F es igual a la suma de las fuerzas de la
masa y el muelle. Además que la fuerza de la masa es igual a la fuerza del amortiguador.
Como la fuerza del muelle/capacitor es igual a la fuerza de la masa/inductor, podemos
concluir que estas están en paralelo (mismo voltaje).
El circuito RLC queda de la siguiente manera.
Figura 4
Aplicando el análisis de mallas.
En la malla 1:
En la malla 2:
Además sabemos que:
∫
;
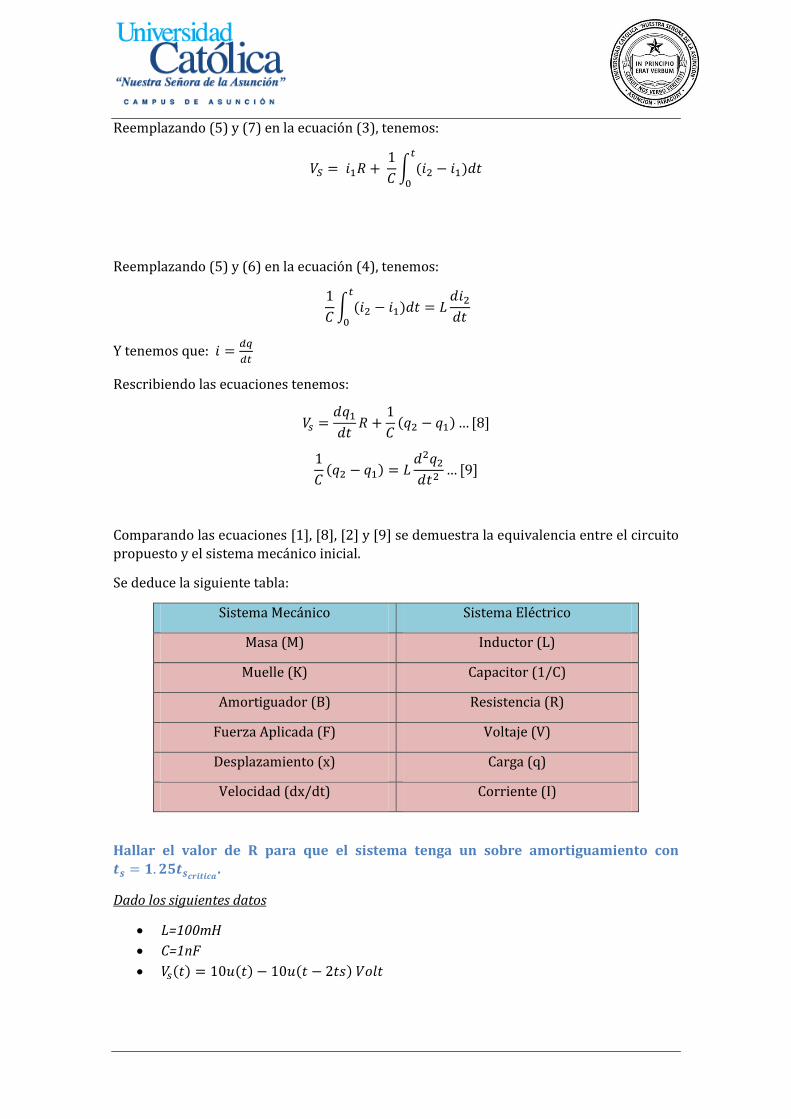
Reemplazando (5) y (7) en la ecuación (3), tenemos:
∫
Reemplazando (5) y (6) en la ecuación (4), tenemos:
∫
Y tenemos que:
Rescribiendo las ecuaciones tenemos:
Comparando las ecuaciones [1], [8], [2] y [9] se demuestra la equivalencia entre el circuito
propuesto y el sistema mecánico inicial.
Se deduce la siguiente tabla:
Sistema Mecánico Sistema Eléctrico
Masa (M) Inductor (L)
Muelle (K) Capacitor (1/C)
Amortiguador (B) Resistencia (R)
Fuerza Aplicada (F) Voltaje (V)
Desplazamiento (x) Carga (q)
Velocidad (dx/dt) Corriente (I)
Hallar el valor de R para que el sistema tenga un sobre amortiguamiento con
.
Dado los siguientes datos
L=100mH
C=1nF
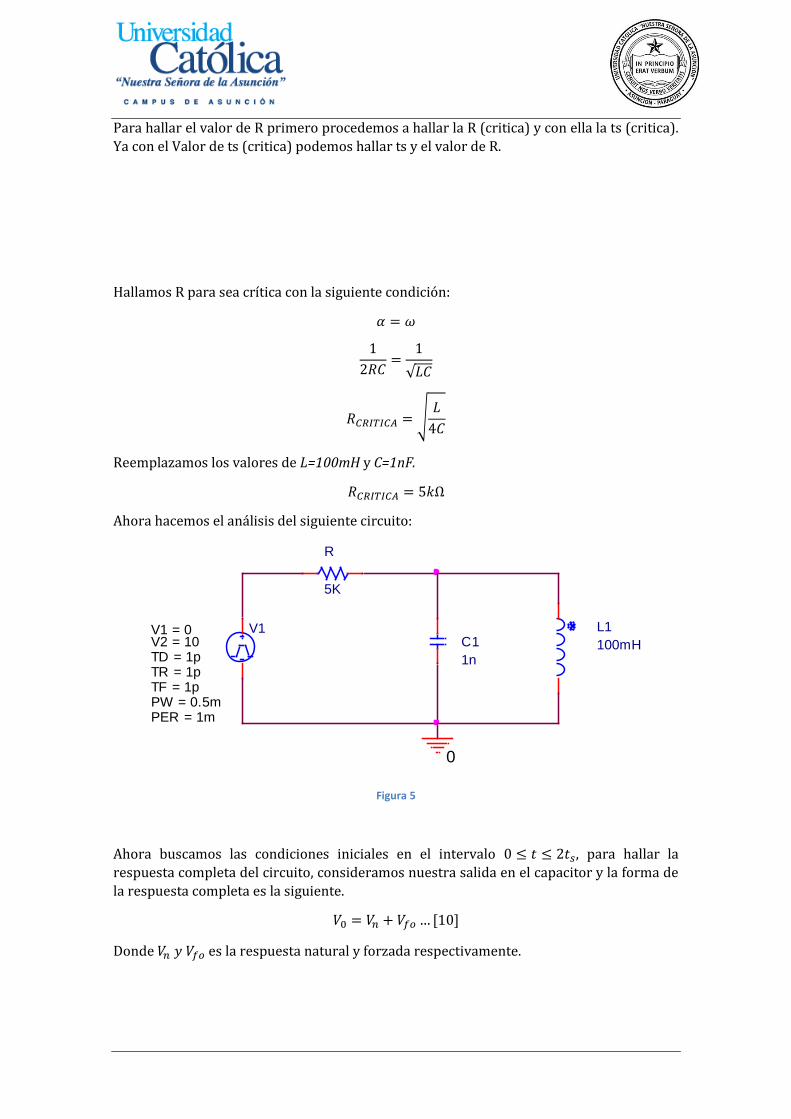
Para hallar el valor de R primero procedemos a hallar la R (critica) y con ella la ts (critica).
Ya con el Valor de ts (critica) podemos hallar ts y el valor de R.
Hallamos R para sea crítica con la siguiente condición:
√
√
Reemplazamos los valores de L=100mH y C=1nF.
Ahora hacemos el análisis del siguiente circuito:
Figura 5
Ahora buscamos las condiciones iniciales en el intervalo , para hallar la
respuesta completa del circuito, consideramos nuestra salida en el capacitor y la forma de
la respuesta completa es la siguiente.
Donde es la respuesta natural y forzada respectivamente.
R
5K
C1
1n
L1
100mH
V1
TD = 1p
TF = 1pPW = 0.5mPER = 1m
V1 = 0
TR = 1p
V2 = 10
0
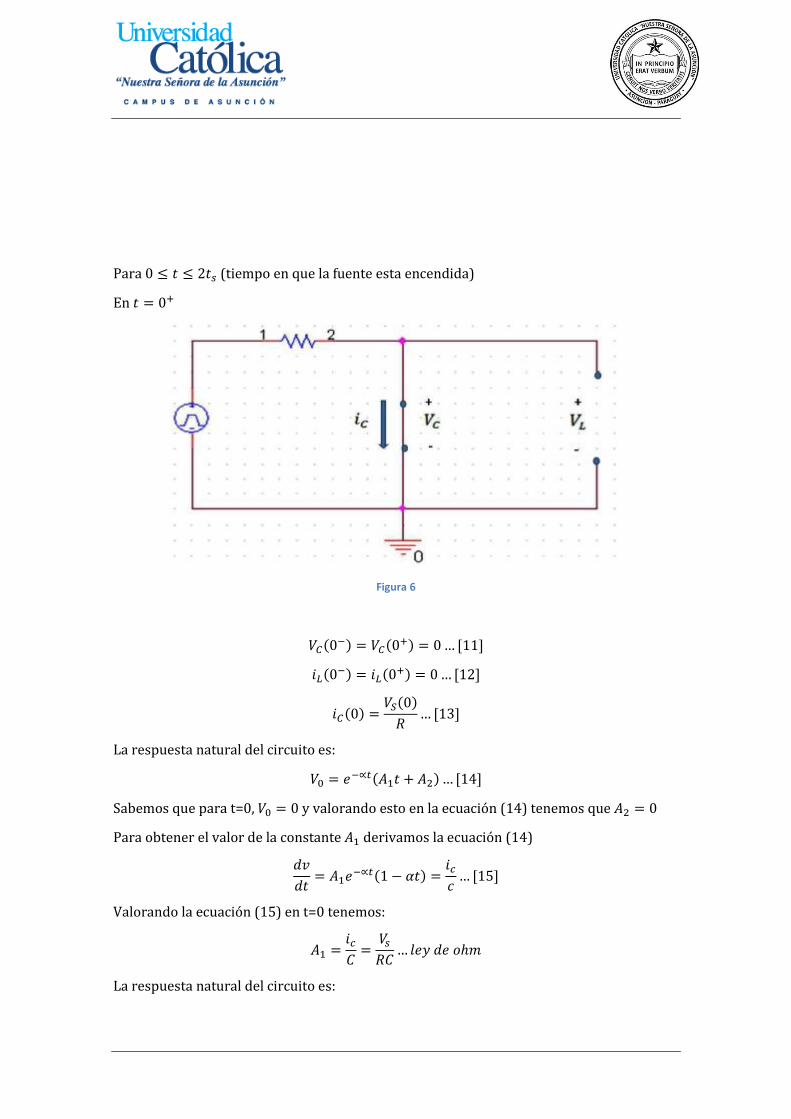
Para (tiempo en que la fuente esta encendida)
En
Figura 6
La respuesta natural del circuito es:
Sabemos que para t=0, y valorando esto en la ecuación (14) tenemos que
Para obtener el valor de la constante derivamos la ecuación (14)
Valorando la ecuación (15) en t=0 tenemos:
La respuesta natural del circuito es:

Ahora hacemos el análisis para t=2ts, que lo consideramos como un tiempo muy largo,
entonces podemos hacer el análisis para , y así hallar la respuesta forzada.
El circuito en estas condiciones queda de esta manera:
Figura 7
Y así tenemos que la respuesta forzada , y la respuesta completa del
circuito quedada dada por la respuesta natural [16].
Ahora calculamos , utilizando el criterio de la primera derivada en la formula
[15]

En la expresión (17) uno de los factores o ambos debe ser igual a 0. Analizando , esta
va a ser igual a 0 para un tiempo infinito, y en el infinito sabemos que , que no puede
ser el valor pico. Entonces .
Despejando t de esa expresión tenemos:
Y tenemos que:
( )
Conociendo el valor pico podemos calcular el valor de establecimiento como el 2% del
valor pico.
Podemos usar el valor de en la ecuación (16), para hallar el tiempo de
establecimiento critico, y con eso el tiempo .
Utilizando Pspice, mediante ensayo y error se pudo determinar el valor de R para que el
tiempo de establecimiento sea .
Utilice los valores de resistencia, capacitancia e inductancia dados para encontrar
los valores del amortiguador, la masa y el muelle del sistema mecánico.
De la tabla de equivalencia podemos deducir que:
Masa:
Constante de amortiguamiento:
Constante del resorte:
Para el circuito eléctrico modelado, halle las corrientes y las tensiones en el capacitor, inductor y resistencia (respuesta completa).

Modelamos el circuito con el nuevo valor de R que hayamos, y queda de la siguiente
manera:
Figura 8
El voltaje de salida para un circuito sobre amortiguado (sabiendo además que en todo
momento ) tiene la siguiente forma:
Donde:
√ ;
;
√
Primero hallamos la respuesta completa para , tiempo en el que la fuente está
encendida, y luego para cuando se desconecta en .
En el circuito queda igual a la Figura 7. Y una vez más tenemos que:
Evaluando la ecuación [19] en t = 0 tenemos que:
Derivamos

Para
Remplazando [20] en [21]
Podemos escribir en función de .
√
Y así:
√
√
Y así la respuesta natural seria:
√
Cuando , como ya vimos en el análisis previo con la , podemos considerar
que ha transcurrido un tiempo muy largo, por lo que el circuito se comportara como si
. El circuito queda como en la figura 7 y se ve que , por lo que la respuesta
completa es igual a la respuesta natural [23].
√
Ahora pasamos a determinar el valor de la tensión en R, para ello aplicamos LVK en la
malla 1.

Reemplazando por [24]:
√
√
Ahora que tenemos todas las tensiones podemos hallar las corrientes.
(
√ )
Para hallar sabemos que
∫
∫
√
√ ∫
√ (
)
Para tenemos que
√

√
√
Ya tenemos la respuesta para el intervalo , ahora analizáremos los voltajes y
corriente para .
El circuito a analizar es el siguiente:
Figura 9
Sabemos que la corriente en el inductor no varía instantáneamente, y
, por tanto el inductor será el único elemente que proveerá energía al sistema.
En la figura 9 se indican las corrientes que pasan por los tres elementos del sistema, y
como se puede ver el capacitor se carga en sentido opuesto al inicial, por tanto su
polaridad cambia, así como en los demás elementos por estar en paralelo.
En este intervalo solo habrá una respuesta natural, ya que la fuente se apaga (figura 10).
(
)
(
)
Tenemos que inicial es cero, y cuando también en cero (el sistema no tiene
alimentación forzada, y los valores decaen con el tiempo). Entonces trabajamos con la
corriente .
Derivamos la ecuación [25] y luego usamos la [26]

Sabemos que en todo momento, entonces . Entonces:
De la ecuación [26] y [27]
Y en [27]:
Reemplazando en la ecuación
Para utilizamos la ecuacion [26].
Para el voltaje en la Resistencia , como los tres elementos estan en paralelo, tendran la
misma tension. Pero, al principio con la fuente teníamos que:

Ahora con
O es lo mismo que decir:
Esto responde al cambio de polarización del cual se había hablado en un principio con
respecto al intervalo
Entonces:
Para tenemos que,
Para , usamos

Respuesta general
√ *
( )+
[
√ ]
( ( )
√ ) *
( )+ [ (
( )
√ )]
(
( )
√ ) *
( )+ [
(
( )
√ )]
√ (
) *
(
)+
√ (
)
√
*
(
)+
√
Teniendo en cuenta que:
√ ; √ ; √ ;

Traslade nuevamente estas expresiones de tensión y corriente a su equivalente
mecánico.
√ *
( )+
[
√ ]
( ( )
√ ) *
( )+ [ (
( )
√ )]
(
( )
√ ) *
( )+ [
(
( )
√ )] *
+
√ (
) *
(
)+
√ (
) *
+
√
*
(
)+
√
*
+
Teniendo en cuenta que:
√
√
√
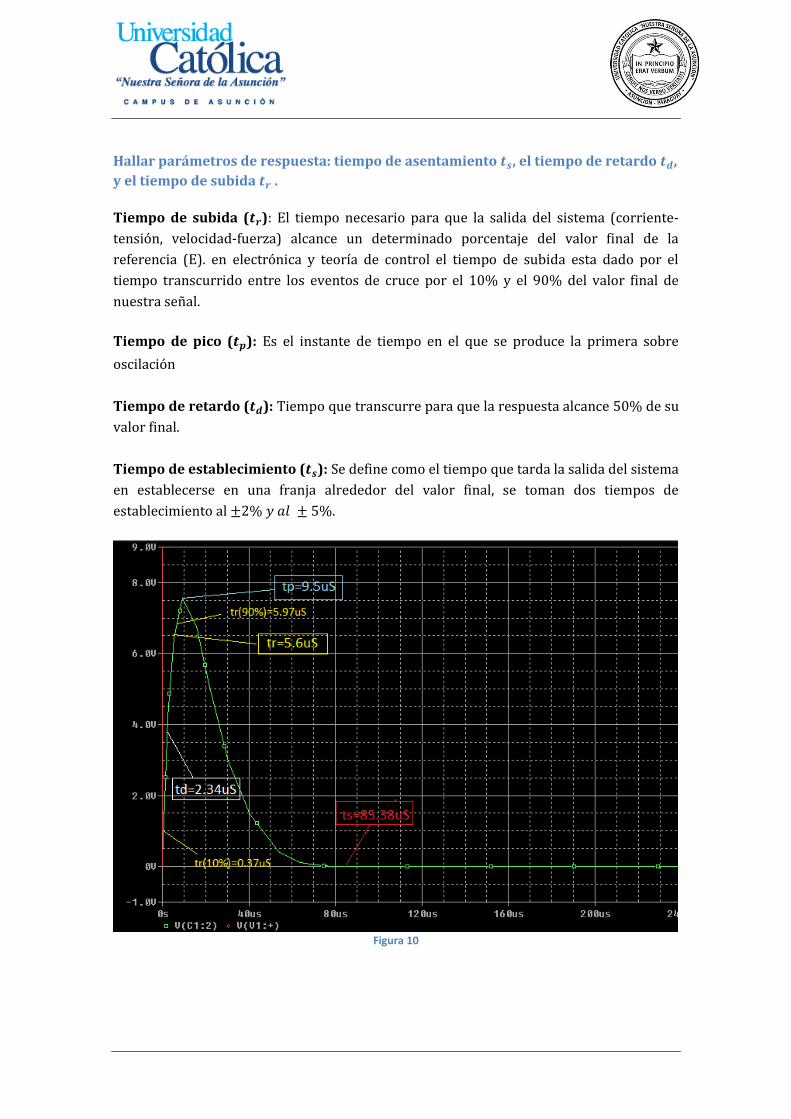
Hallar parámetros de respuesta: tiempo de asentamiento , el tiempo de retardo ,
y el tiempo de subida .
Tiempo de subida ( ): El tiempo necesario para que la salida del sistema (corriente-
tensión, velocidad-fuerza) alcance un determinado porcentaje del valor final de la
referencia (E). en electrónica y teoría de control el tiempo de subida esta dado por el
tiempo transcurrido entre los eventos de cruce por el 10% y el 90% del valor final de
nuestra señal.
Tiempo de pico ( ): Es el instante de tiempo en el que se produce la primera sobre
oscilación
Tiempo de retardo ( ): Tiempo que transcurre para que la respuesta alcance 50% de su
valor final.
Tiempo de establecimiento ( ): Se define como el tiempo que tarda la salida del sistema
en establecerse en una franja alrededor del valor final, se toman dos tiempos de
establecimiento al .
Figura 10
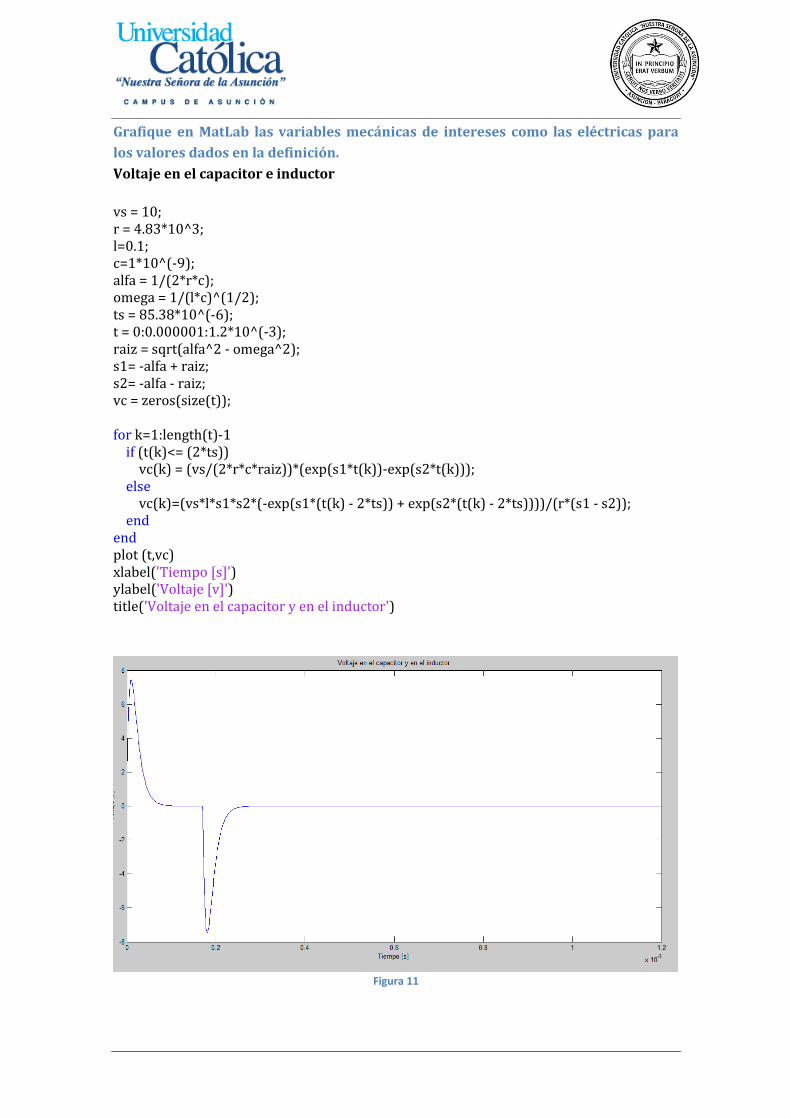
Grafique en MatLab las variables mecánicas de intereses como las eléctricas para
los valores dados en la definición.
Voltaje en el capacitor e inductor
vs = 10; r = 4.83*10^3; l=0.1; c=1*10^(-9); alfa = 1/(2*r*c); omega = 1/(l*c)^(1/2); ts = 85.38*10^(-6); t = 0:0.000001:1.2*10^(-3); raiz = sqrt(alfa^2 - omega^2); s1= -alfa + raiz; s2= -alfa - raiz; vc = zeros(size(t)); for k=1:length(t)-1 if (t(k)<= (2*ts)) vc(k) = (vs/(2*r*c*raiz))*(exp(s1*t(k))-exp(s2*t(k))); else vc(k)=(vs*l*s1*s2*(-exp(s1*(t(k) - 2*ts)) + exp(s2*(t(k) - 2*ts))))/(r*(s1 - s2)); end end plot (t,vc) xlabel('Tiempo [s]') ylabel('Voltaje [v]') title('Voltaje en el capacitor y en el inductor')
Figura 11
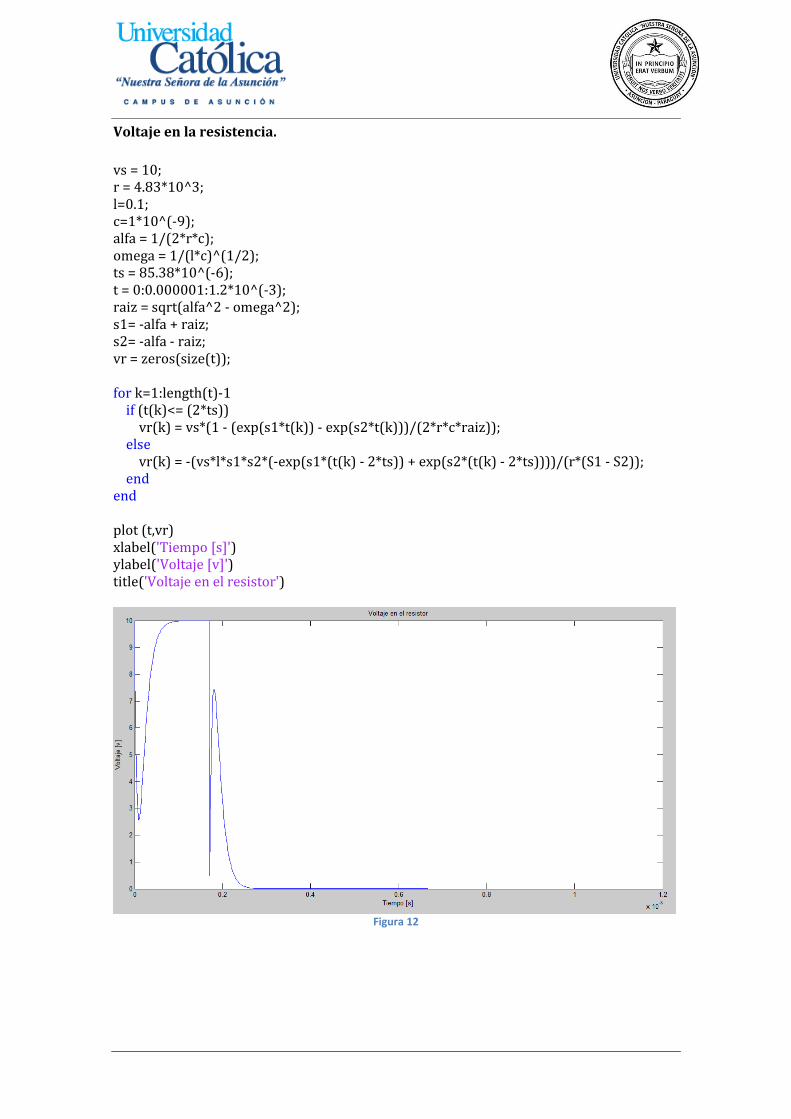
Voltaje en la resistencia.
vs = 10; r = 4.83*10^3; l=0.1; c=1*10^(-9); alfa = 1/(2*r*c); omega = 1/(l*c)^(1/2); ts = 85.38*10^(-6); t = 0:0.000001:1.2*10^(-3); raiz = sqrt(alfa^2 - omega^2); s1= -alfa + raiz; s2= -alfa - raiz; vr = zeros(size(t)); for k=1:length(t)-1 if (t(k)<= (2*ts)) vr(k) = vs*(1 - (exp(s1*t(k)) - exp(s2*t(k)))/(2*r*c*raiz)); else vr(k) = -(vs*l*s1*s2*(-exp(s1*(t(k) - 2*ts)) + exp(s2*(t(k) - 2*ts))))/(r*(S1 - S2)); end end plot (t,vr) xlabel('Tiempo [s]') ylabel('Voltaje [v]') title('Voltaje en el resistor')
Figura 12
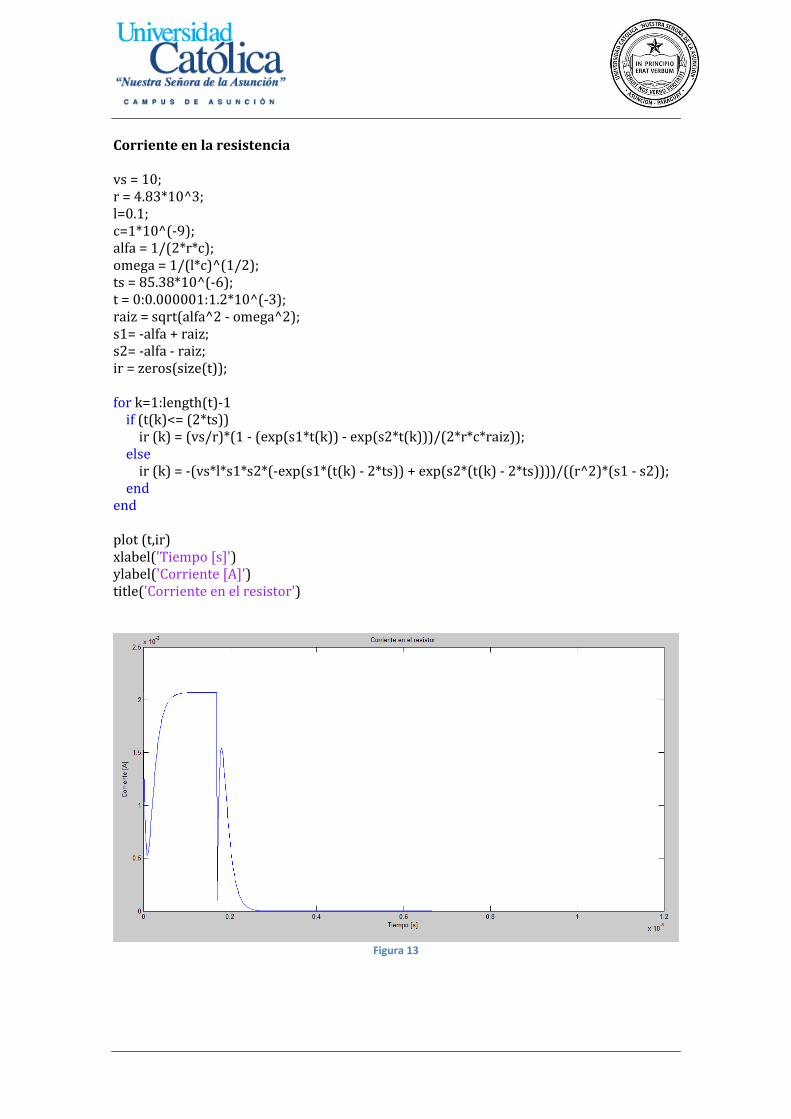
Corriente en la resistencia vs = 10; r = 4.83*10^3; l=0.1; c=1*10^(-9); alfa = 1/(2*r*c); omega = 1/(l*c)^(1/2); ts = 85.38*10^(-6); t = 0:0.000001:1.2*10^(-3); raiz = sqrt(alfa^2 - omega^2); s1= -alfa + raiz; s2= -alfa - raiz; ir = zeros(size(t)); for k=1:length(t)-1 if (t(k)<= (2*ts)) ir (k) = (vs/r)*(1 - (exp(s1*t(k)) - exp(s2*t(k)))/(2*r*c*raiz)); else ir (k) = -(vs*l*s1*s2*(-exp(s1*(t(k) - 2*ts)) + exp(s2*(t(k) - 2*ts))))/((r^2)*(s1 - s2)); end end plot (t,ir) xlabel('Tiempo [s]') ylabel('Corriente [A]') title('Corriente en el resistor')
Figura 13
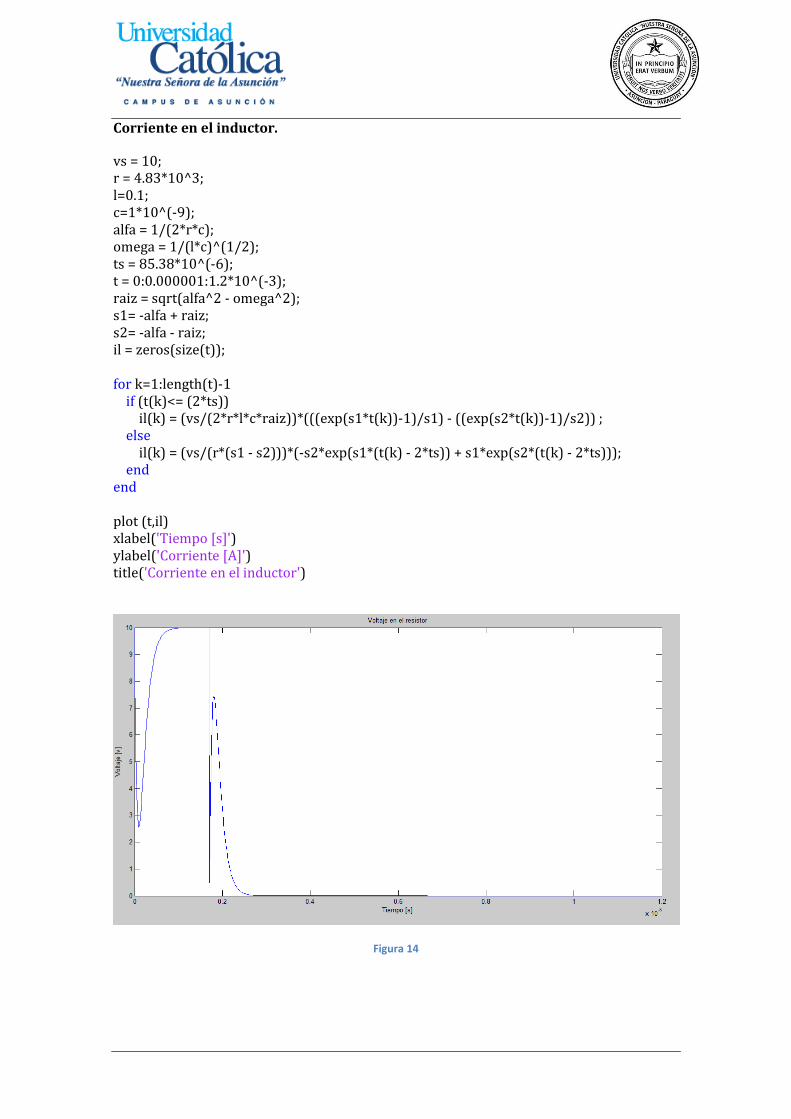
Corriente en el inductor.
vs = 10; r = 4.83*10^3; l=0.1; c=1*10^(-9); alfa = 1/(2*r*c); omega = 1/(l*c)^(1/2); ts = 85.38*10^(-6); t = 0:0.000001:1.2*10^(-3); raiz = sqrt(alfa^2 - omega^2); s1= -alfa + raiz; s2= -alfa - raiz; il = zeros(size(t)); for k=1:length(t)-1 if (t(k)<= (2*ts)) il(k) = (vs/(2*r*l*c*raiz))*(((exp(s1*t(k))-1)/s1) - ((exp(s2*t(k))-1)/s2)) ; else il(k) = (vs/(r*(s1 - s2)))*(-s2*exp(s1*(t(k) - 2*ts)) + s1*exp(s2*(t(k) - 2*ts))); end end plot (t,il) xlabel('Tiempo [s]') ylabel('Corriente [A]') title('Corriente en el inductor')
Figura 14
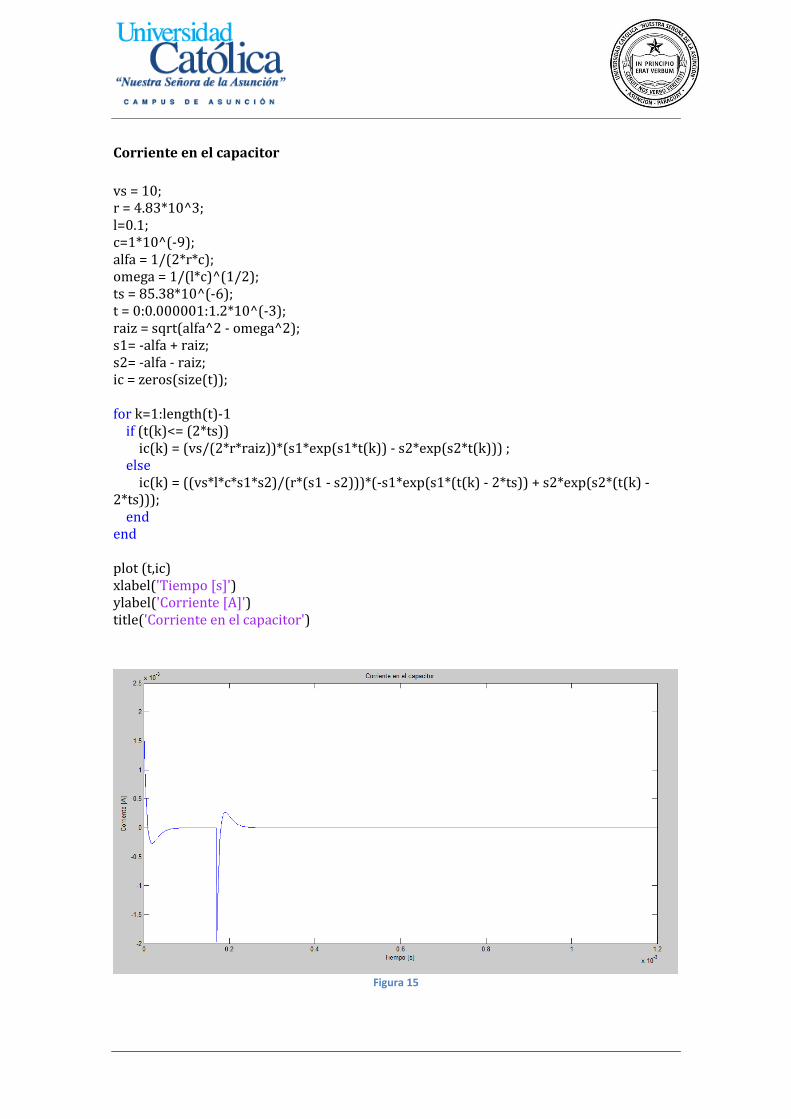
Corriente en el capacitor
vs = 10; r = 4.83*10^3; l=0.1; c=1*10^(-9); alfa = 1/(2*r*c); omega = 1/(l*c)^(1/2); ts = 85.38*10^(-6); t = 0:0.000001:1.2*10^(-3); raiz = sqrt(alfa^2 - omega^2); s1= -alfa + raiz; s2= -alfa - raiz; ic = zeros(size(t)); for k=1:length(t)-1 if (t(k)<= (2*ts)) ic(k) = (vs/(2*r*raiz))*(s1*exp(s1*t(k)) - s2*exp(s2*t(k))) ; else ic(k) = ((vs*l*c*s1*s2)/(r*(s1 - s2)))*(-s1*exp(s1*(t(k) - 2*ts)) + s2*exp(s2*(t(k) - 2*ts))); end end plot (t,ic) xlabel('Tiempo [s]') ylabel('Corriente [A]') title('Corriente en el capacitor')
Figura 15
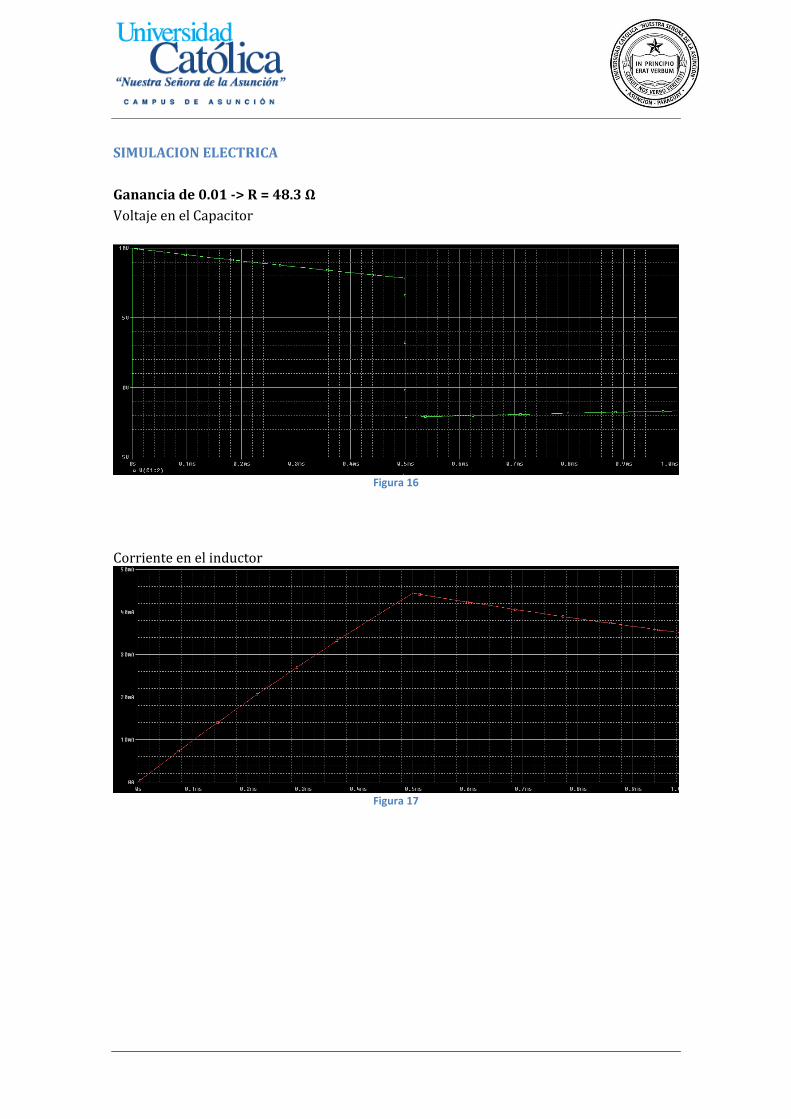
SIMULACION ELECTRICA
Ganancia de 0.01 -> R = 48.3 Ω
Voltaje en el Capacitor
Figura 16
Corriente en el inductor
Figura 17
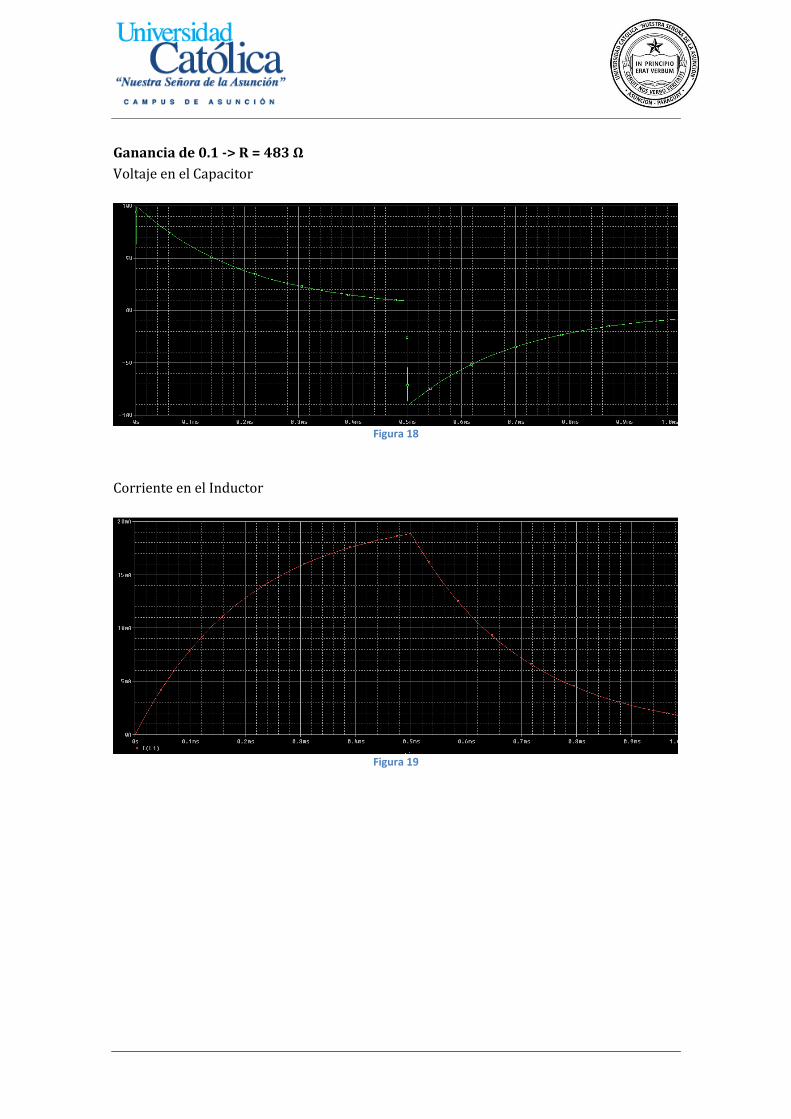
Ganancia de 0.1 -> R = 483 Ω
Voltaje en el Capacitor
Figura 18
Corriente en el Inductor
Figura 19
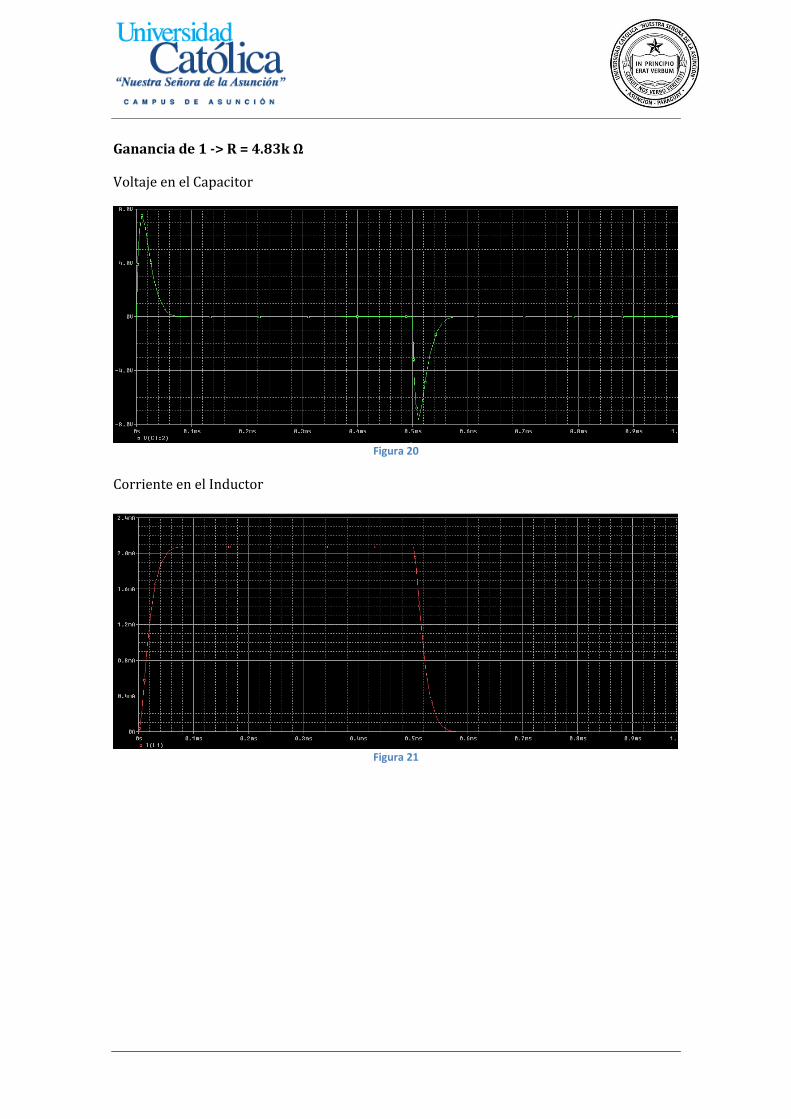
Ganancia de 1 -> R = 4.83k Ω
Voltaje en el Capacitor
Figura 20
Corriente en el Inductor
Figura 21
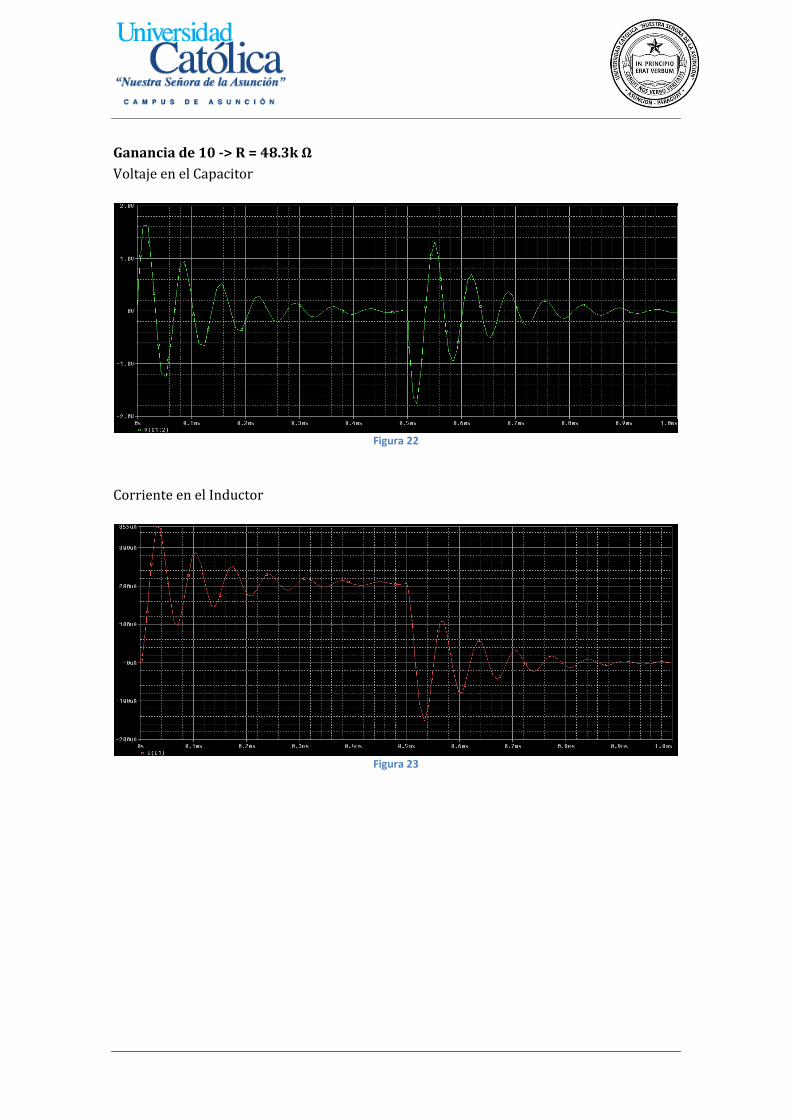
Ganancia de 10 -> R = 48.3k Ω
Voltaje en el Capacitor
Figura 22
Corriente en el Inductor
Figura 23
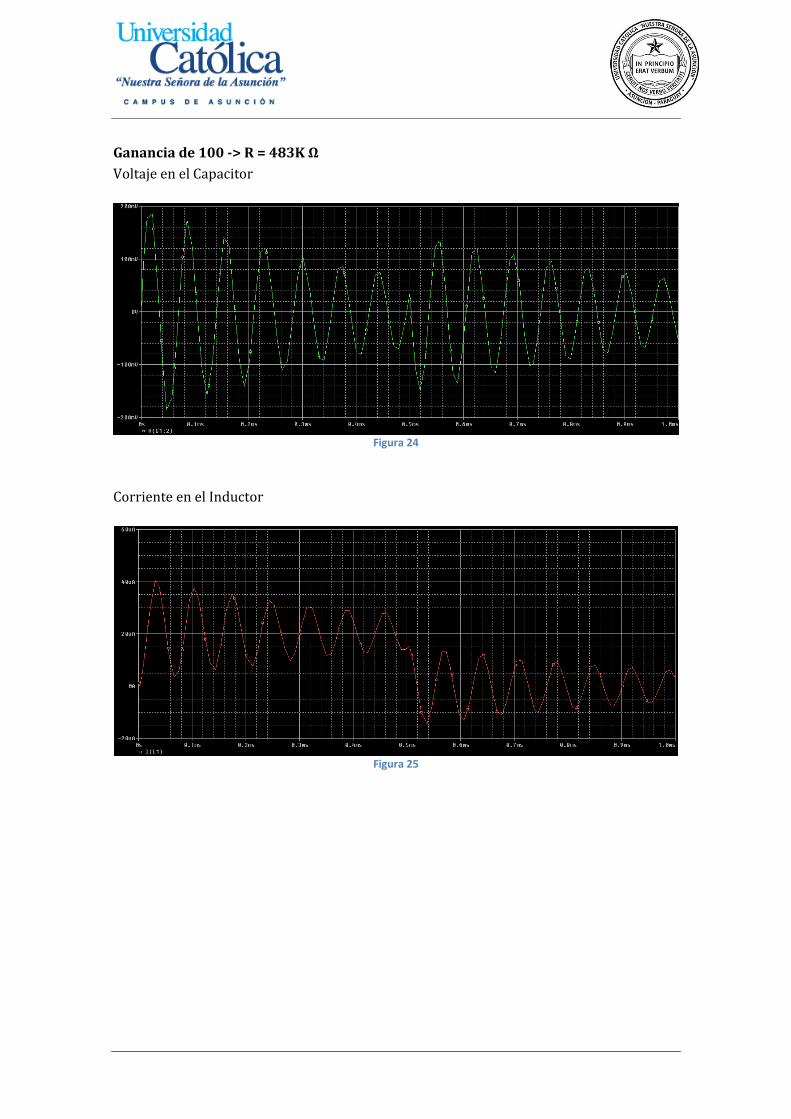
Ganancia de 100 -> R = 483K Ω
Voltaje en el Capacitor
Figura 24
Corriente en el Inductor
Figura 25
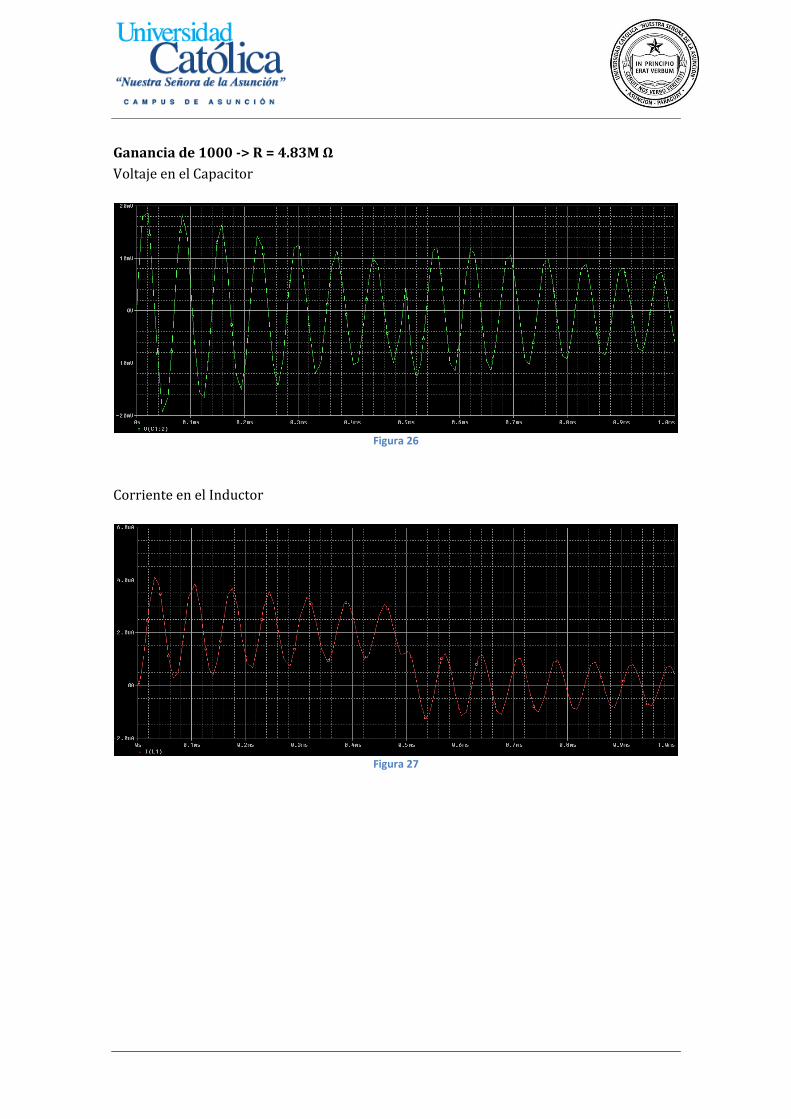
Ganancia de 1000 -> R = 4.83M Ω
Voltaje en el Capacitor
Figura 26
Corriente en el Inductor
Figura 27
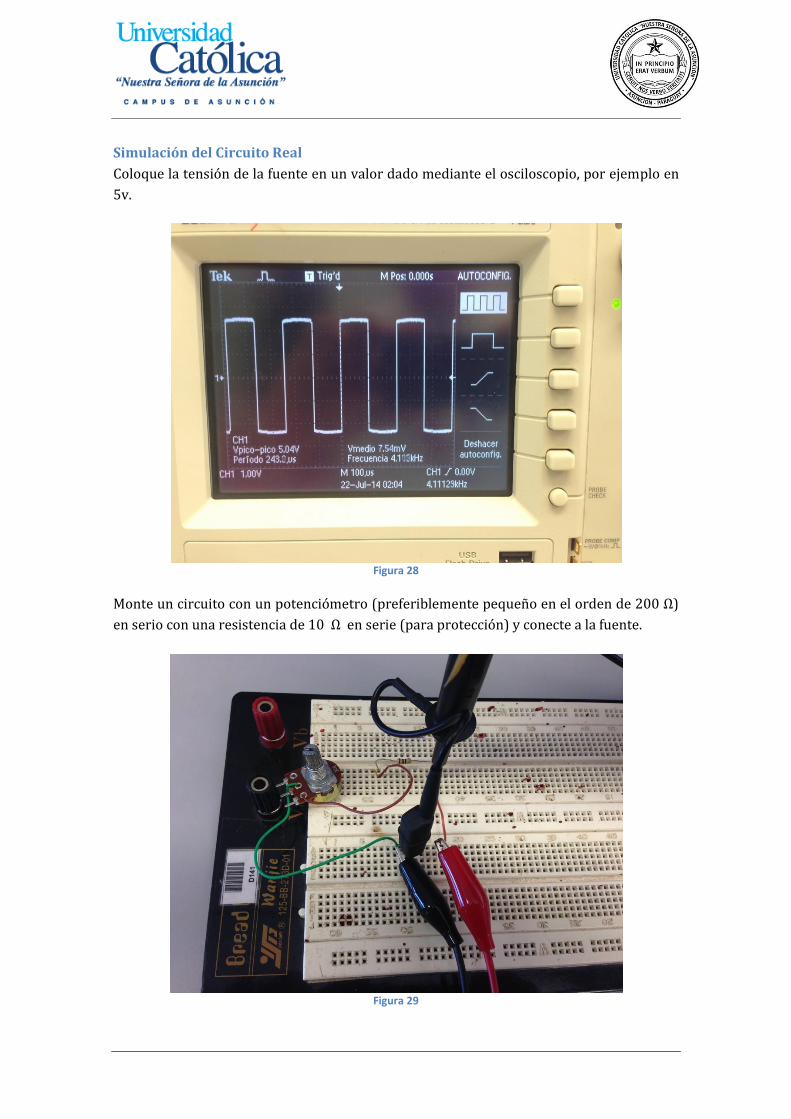
Simulación del Circuito Real
Coloque la tensión de la fuente en un valor dado mediante el osciloscopio, por ejemplo en
5v.
Figura 28
Monte un circuito con un potenciómetro (preferiblemente pequeño en el orden de 200 Ω)
en serio con una resistencia de 10 Ω en serie (para protección) y conecte a la fuente.
Figura 29
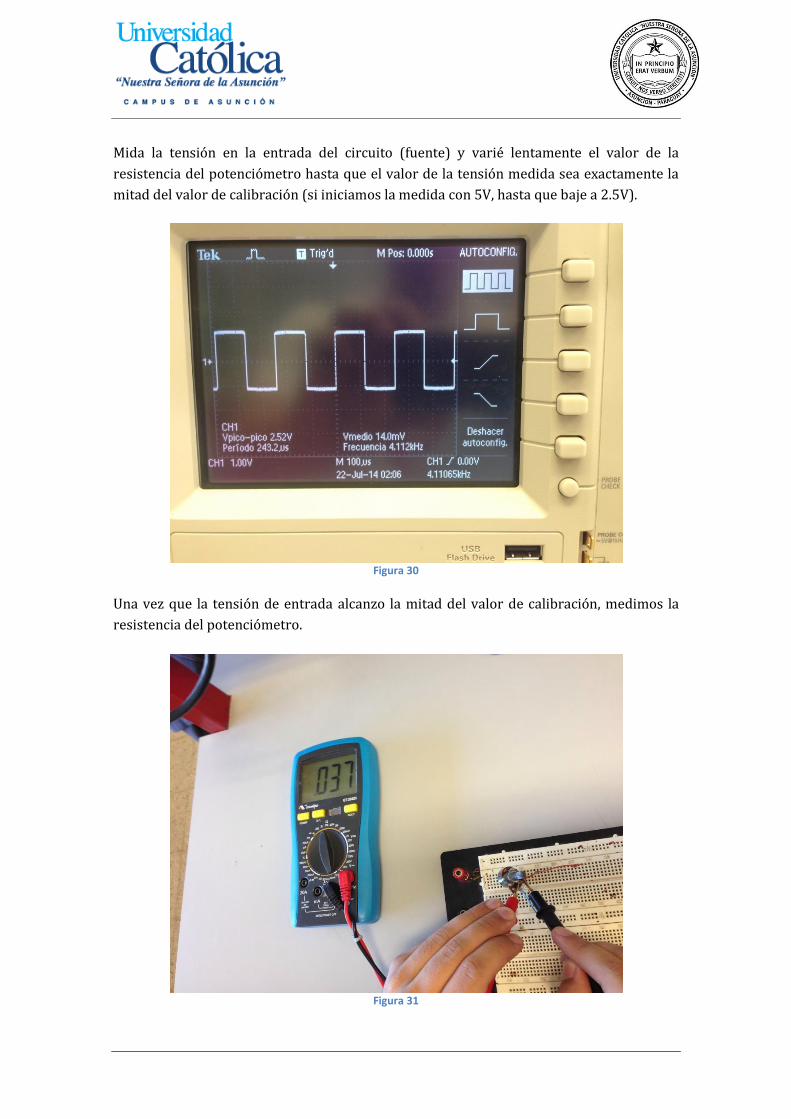
Mida la tensión en la entrada del circuito (fuente) y varié lentamente el valor de la
resistencia del potenciómetro hasta que el valor de la tensión medida sea exactamente la
mitad del valor de calibración (si iniciamos la medida con 5V, hasta que baje a 2.5V).
Figura 30
Una vez que la tensión de entrada alcanzo la mitad del valor de calibración, medimos la
resistencia del potenciómetro.
Figura 31
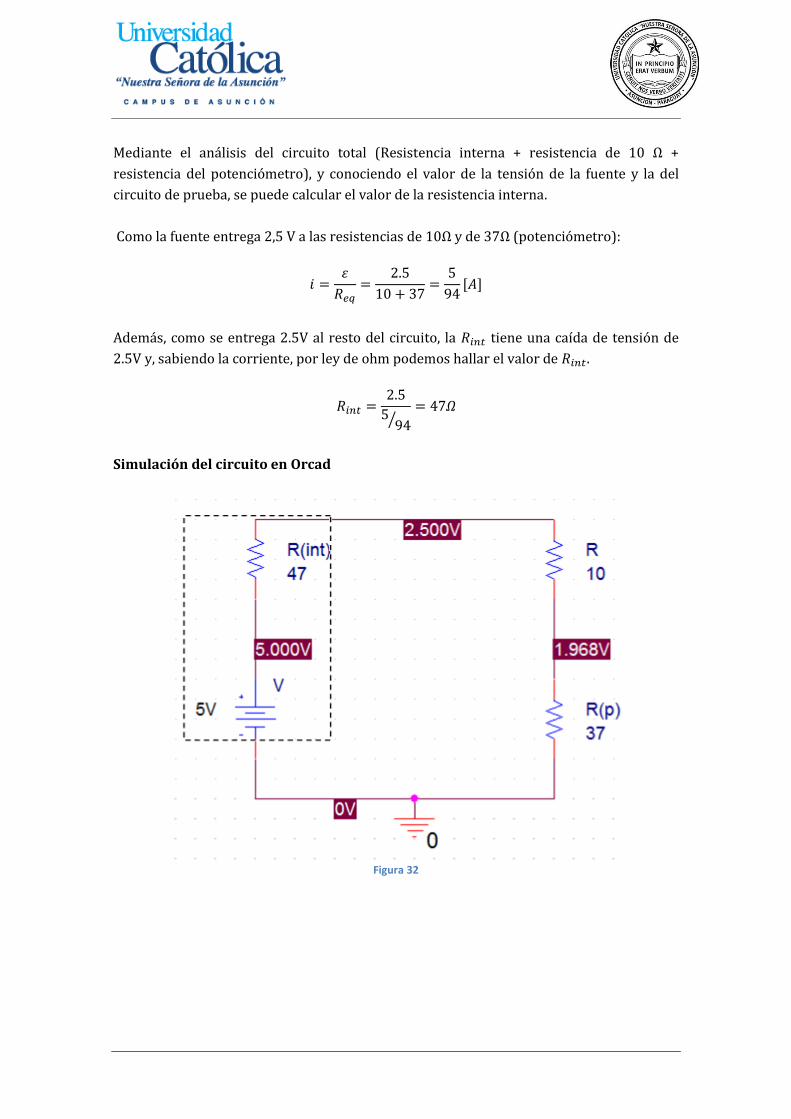
Mediante el análisis del circuito total (Resistencia interna + resistencia de 10 Ω +
resistencia del potenciómetro), y conociendo el valor de la tensión de la fuente y la del
circuito de prueba, se puede calcular el valor de la resistencia interna.
Como la fuente entrega 2,5 V a las resistencias de 10Ω y de 37Ω (potenciómetro):
Además, como se entrega 2.5V al resto del circuito, la tiene una caída de tensión de
2.5V y, sabiendo la corriente, por ley de ohm podemos hallar el valor de .
⁄
Simulación del circuito en Orcad
Figura 32
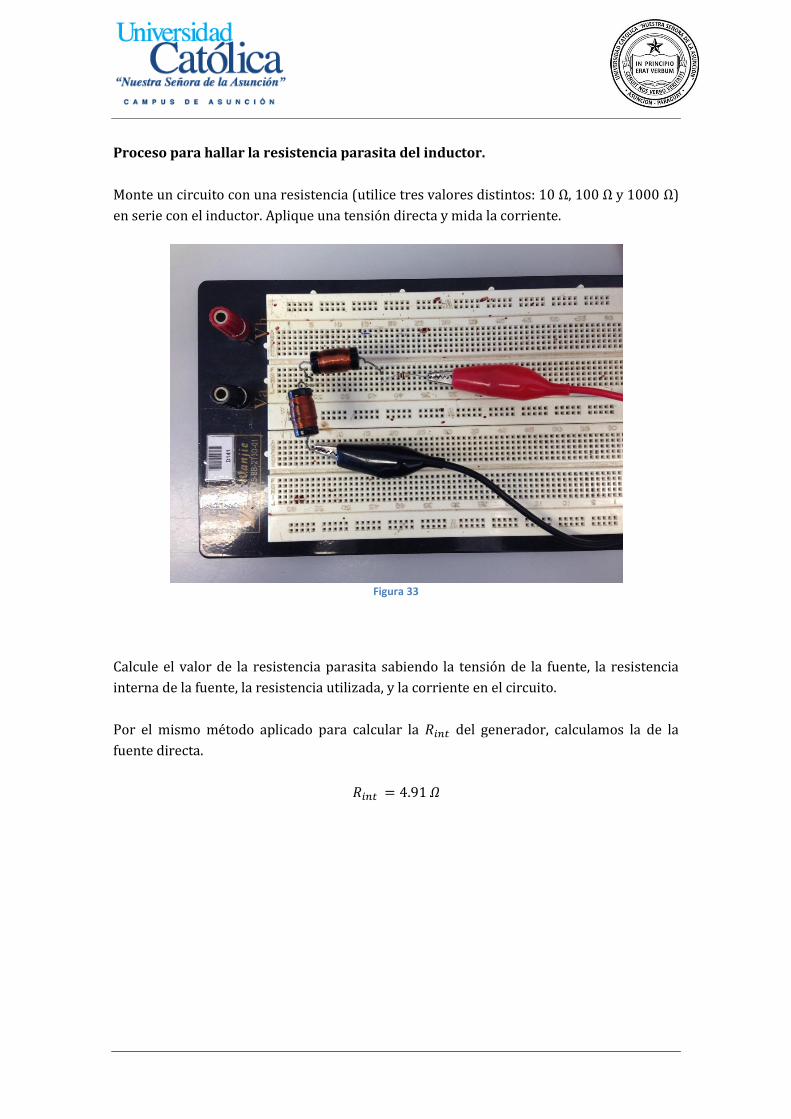
Proceso para hallar la resistencia parasita del inductor.
Monte un circuito con una resistencia (utilice tres valores distintos: 10 Ω, 100 Ω y 1000 Ω)
en serie con el inductor. Aplique una tensión directa y mida la corriente.
Figura 33
Calcule el valor de la resistencia parasita sabiendo la tensión de la fuente, la resistencia
interna de la fuente, la resistencia utilizada, y la corriente en el circuito.
Por el mismo método aplicado para calcular la del generador, calculamos la de la
fuente directa.
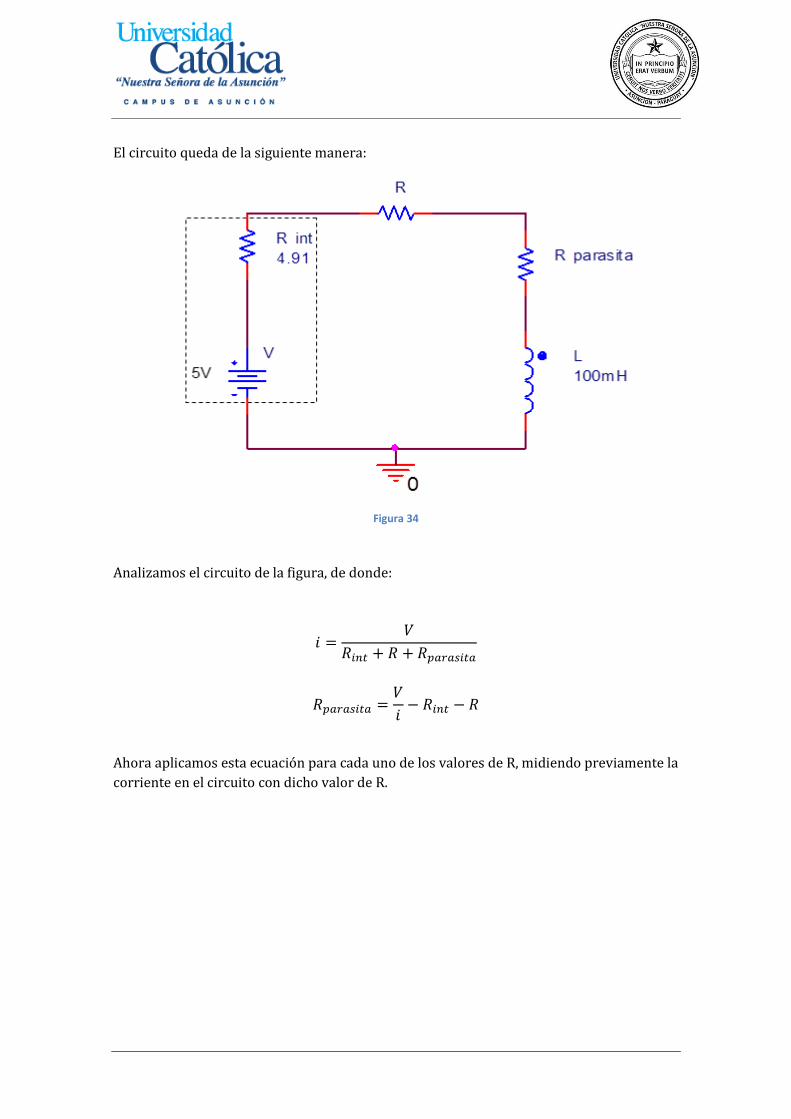
El circuito queda de la siguiente manera:
Figura 34
Analizamos el circuito de la figura, de donde:
Ahora aplicamos esta ecuación para cada uno de los valores de R, midiendo previamente la
corriente en el circuito con dicho valor de R.
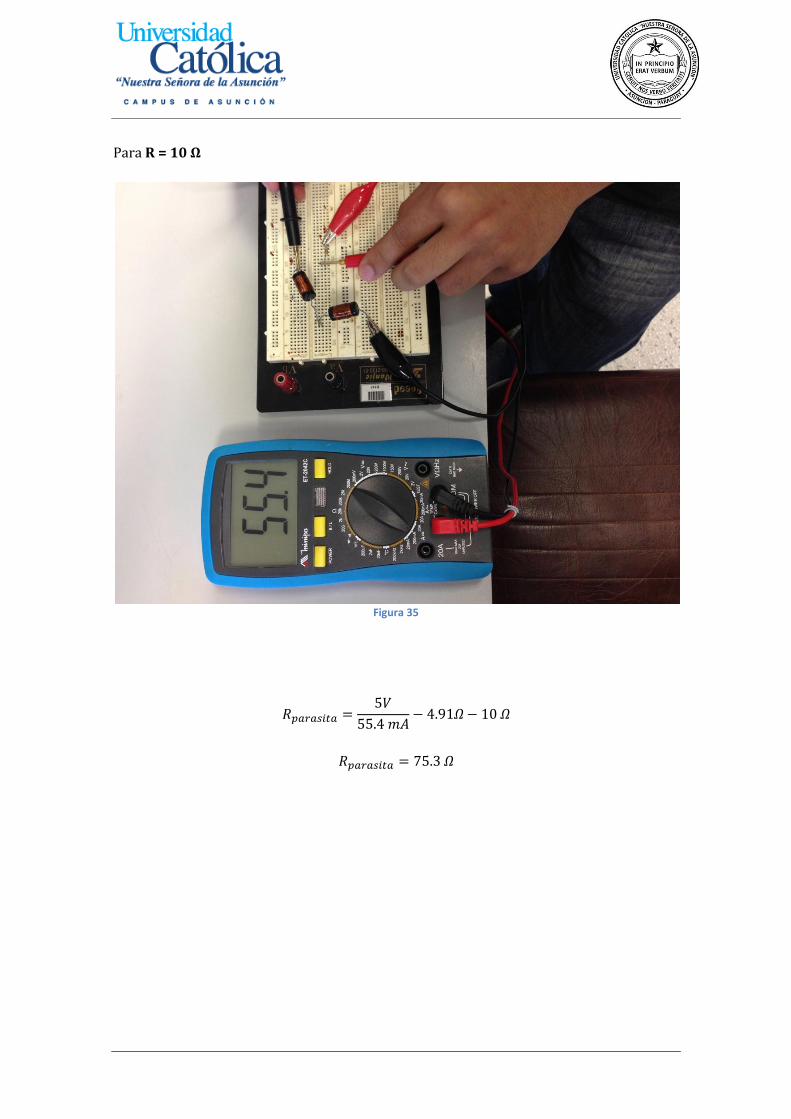
Para R = 10 Ω
Figura 35
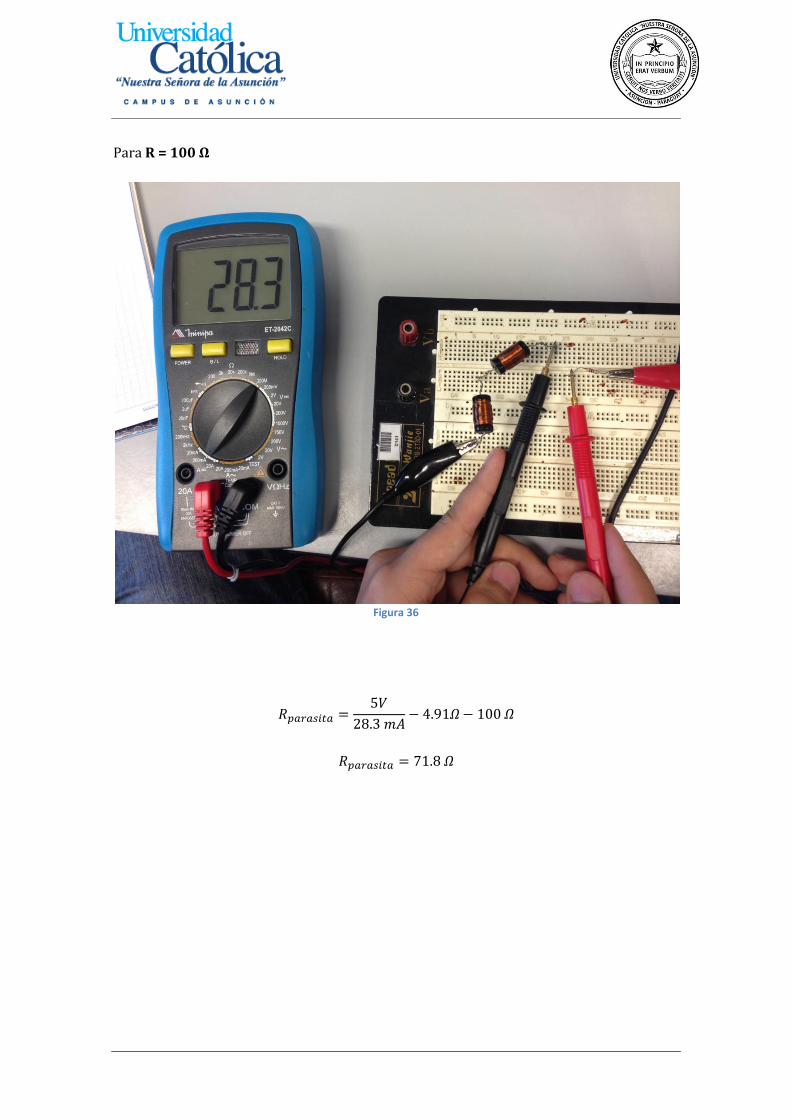
Para R = 100 Ω
Figura 36
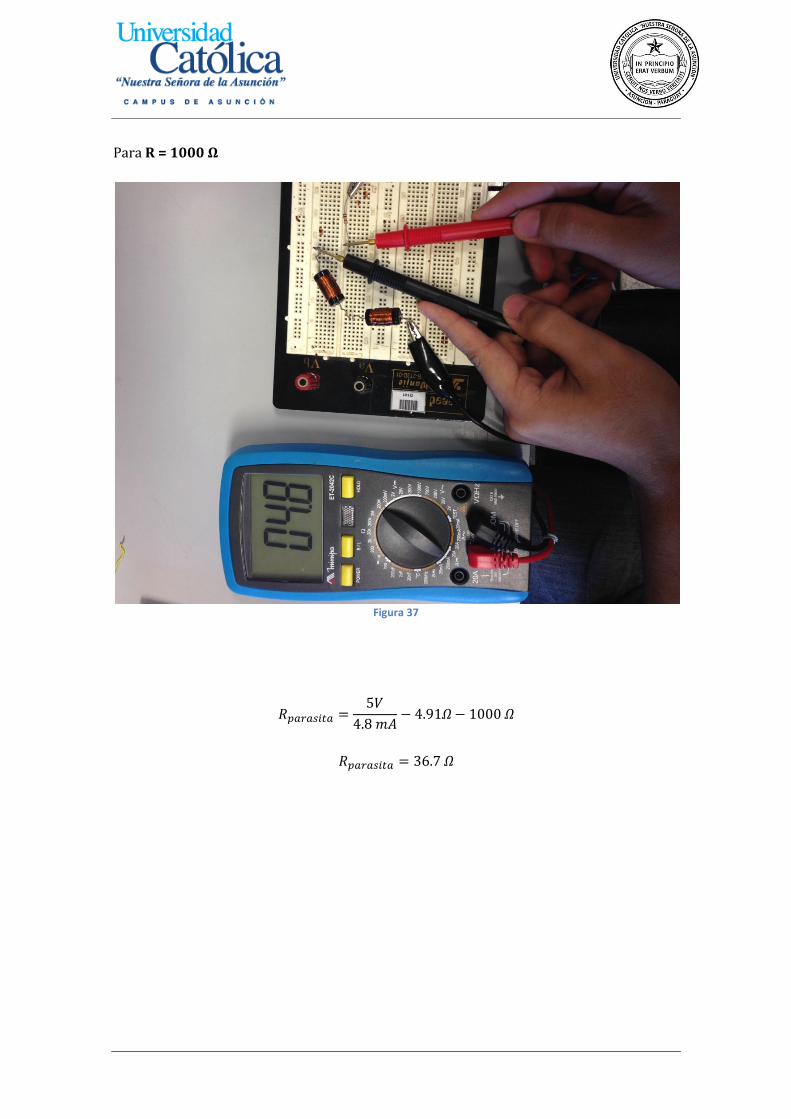
Para R = 1000 Ω
Figura 37

Ahora medimos con el multímetro la resistencia parasita del inductor
Figura 38
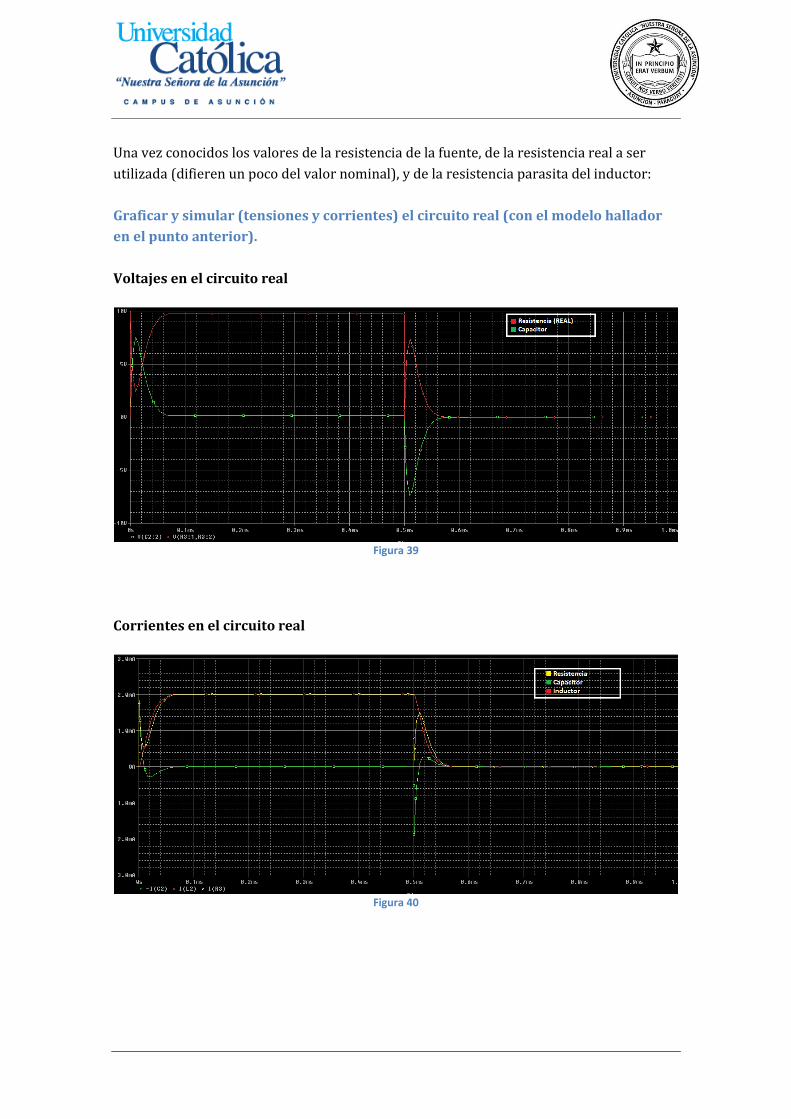
Una vez conocidos los valores de la resistencia de la fuente, de la resistencia real a ser
utilizada (difieren un poco del valor nominal), y de la resistencia parasita del inductor:
Graficar y simular (tensiones y corrientes) el circuito real (con el modelo hallador
en el punto anterior).
Voltajes en el circuito real
Figura 39
Corrientes en el circuito real
Figura 40
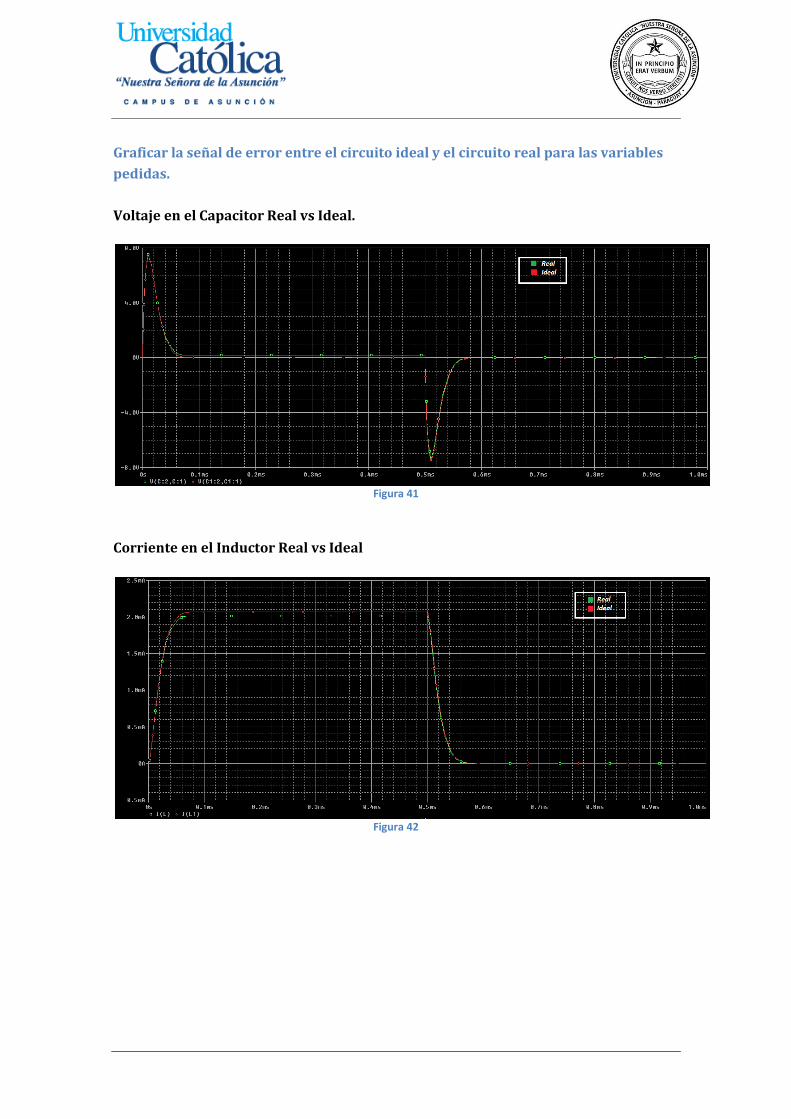
Graficar la señal de error entre el circuito ideal y el circuito real para las variables
pedidas.
Voltaje en el Capacitor Real vs Ideal.
Figura 41
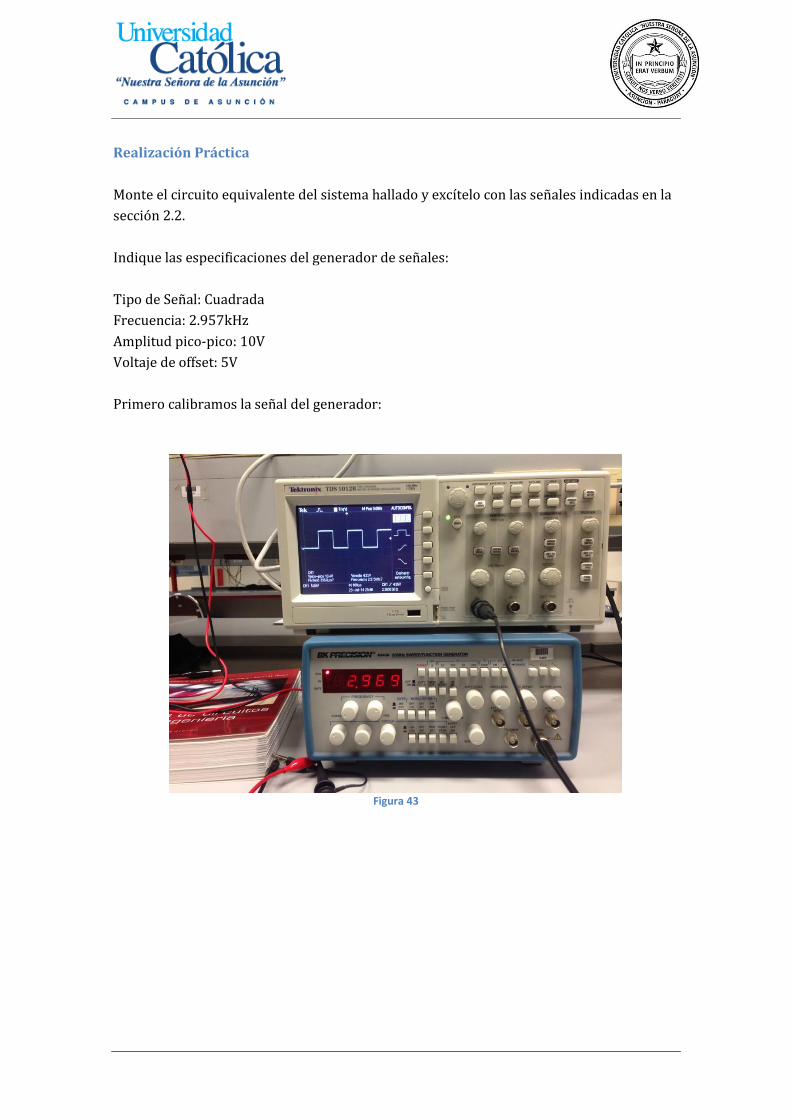
Corriente en el Inductor Real vs Ideal
Figura 42
Realización Práctica
Monte el circuito equivalente del sistema hallado y excítelo con las señales indicadas en la
sección 2.2.
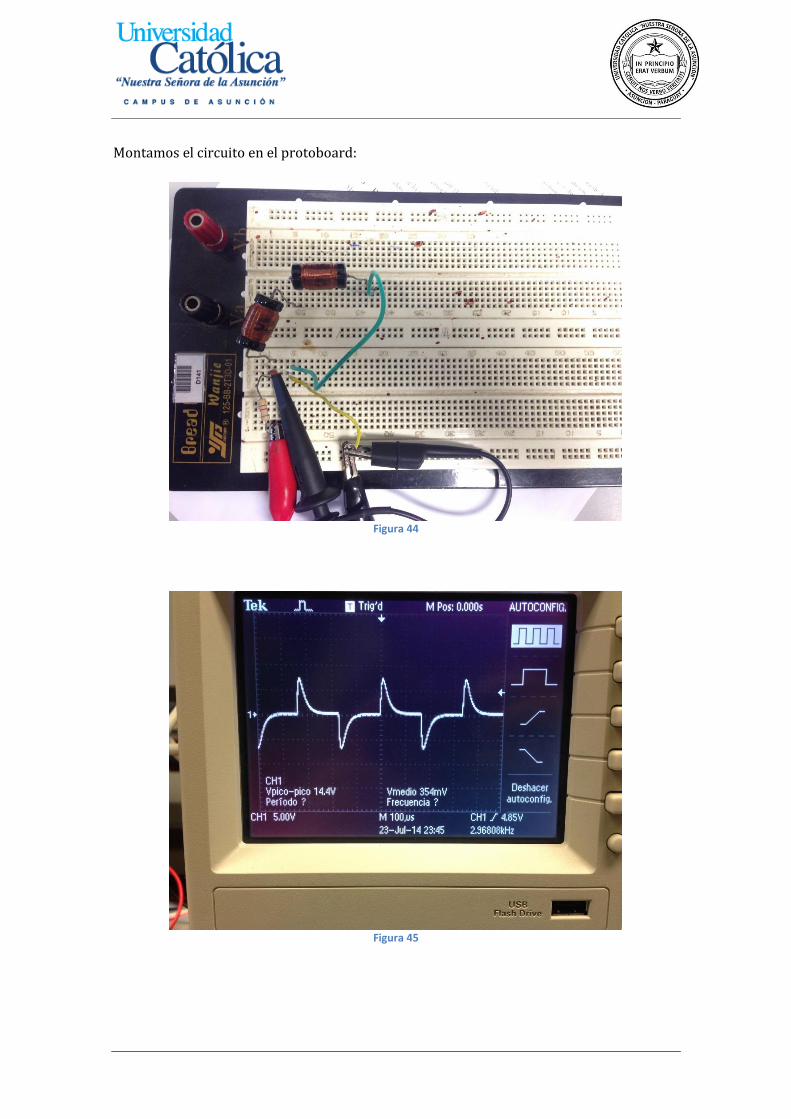
Indique las especificaciones del generador de señales:
Tipo de Señal: Cuadrada
Frecuencia: 2.957kHz
Amplitud pico-pico: 10V
Voltaje de offset: 5V
Primero calibramos la señal del generador:
Figura 43
Montamos el circuito en el protoboard:
Figura 44
Figura 45
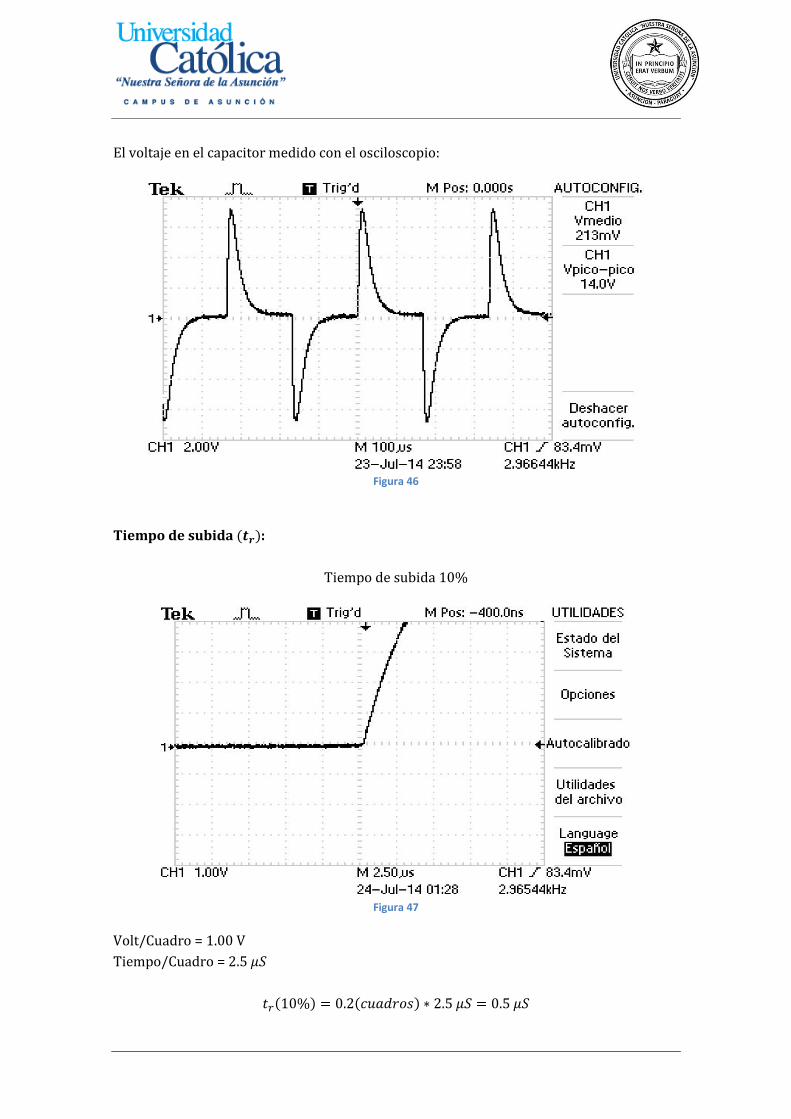
El voltaje en el capacitor medido con el osciloscopio:
Figura 46
Tiempo de subida :
Tiempo de subida 10%
Figura 47
Volt/Cuadro = 1.00 V
Tiempo/Cuadro =
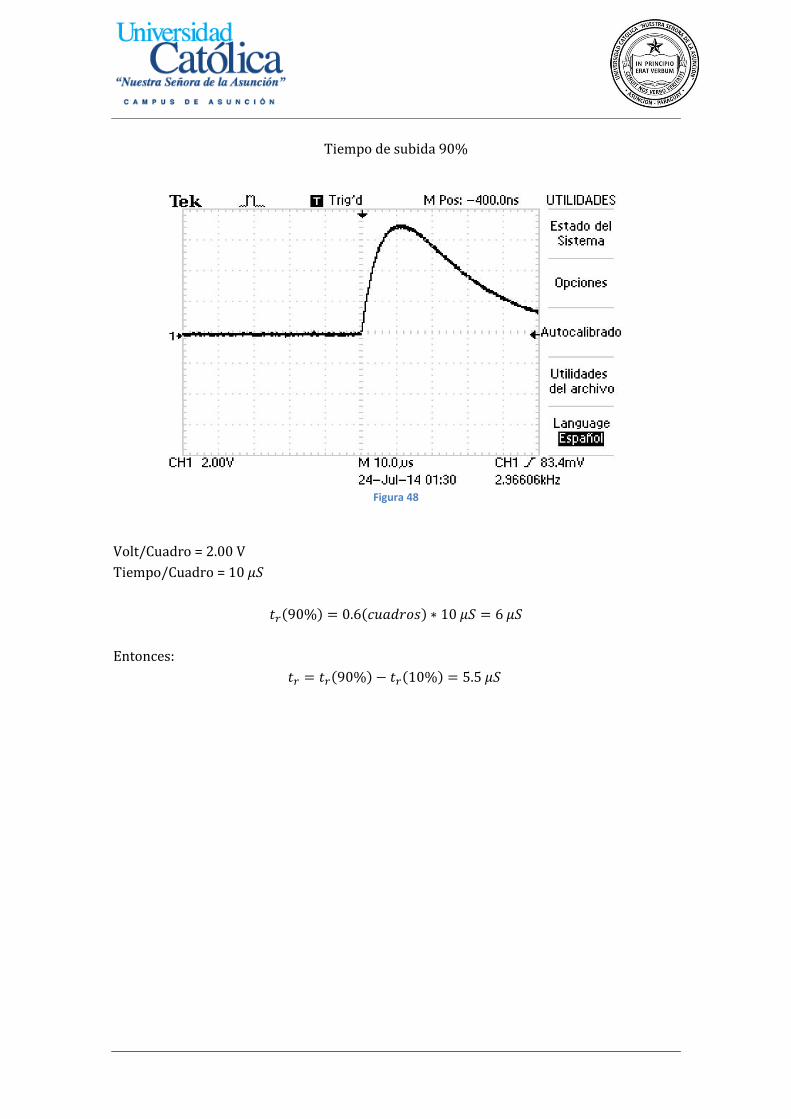
Tiempo de subida 90%
Figura 48
Volt/Cuadro = 2.00 V
Tiempo/Cuadro =
Entonces:
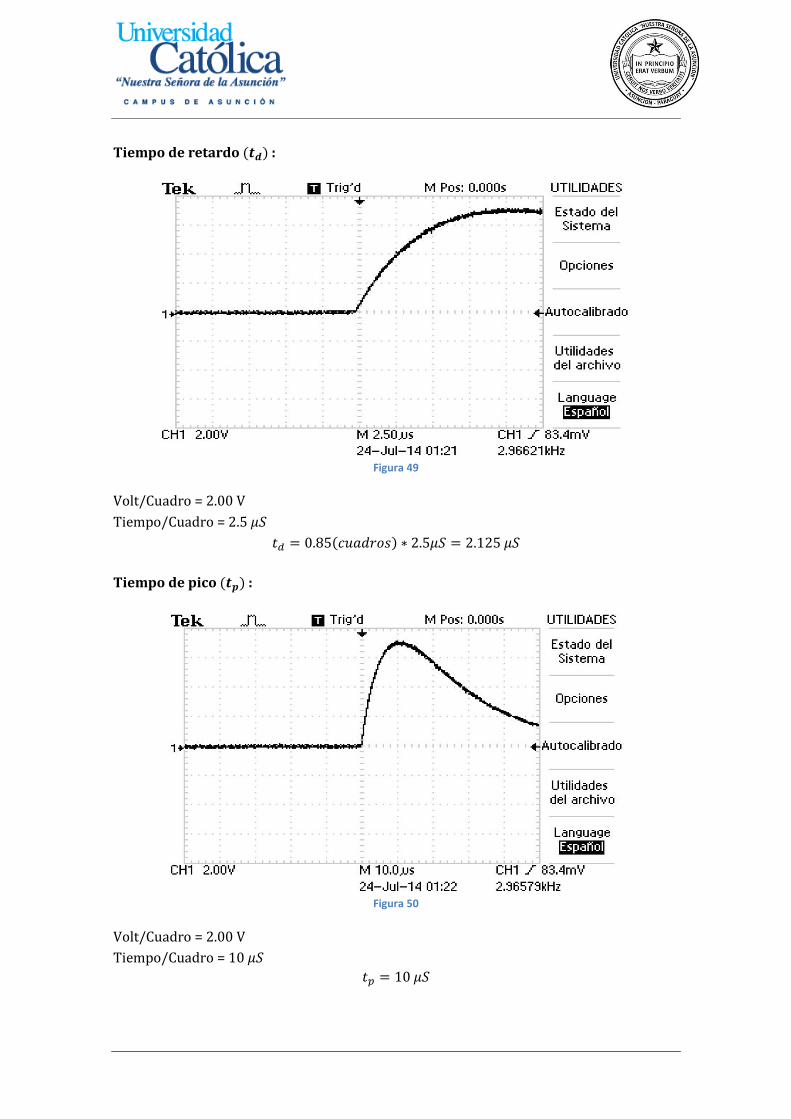
Tiempo de retardo :
Figura 49
Volt/Cuadro = 2.00 V
Tiempo/Cuadro =
Tiempo de pico :
Figura 50
Volt/Cuadro = 2.00 V
Tiempo/Cuadro =
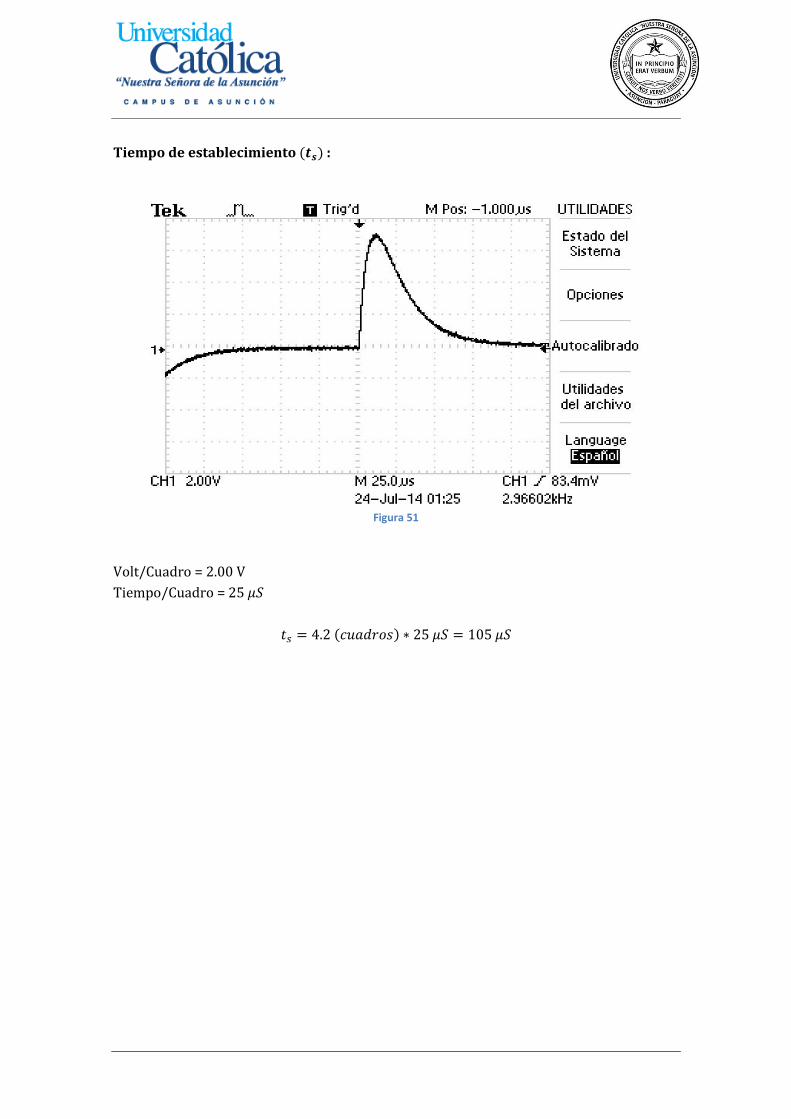
Tiempo de establecimiento :
Figura 51
Volt/Cuadro = 2.00 V
Tiempo/Cuadro =
CONCLUSION
Con este trabajo se pudo demostrar la equivalencia entre un sistema mecánico y uno
eléctrico, además de darnos cuenta de como esta equivalencia puede facilitar los cálculos
del sistema mecánico.
Además pudimos comprobar como las simulaciones de un circuito real se asemejan
bastante a los datos que se pueden extraer del circuito montado en un protoboard y
analizado con un osciloscopio.

BIBLIOGRAFIA
Análisis de Circuitos en Ingeniería 8va Edición.
Física Universitaria Vol 1-2 – Sears Zemansky
PDFs de laboratorios de Teoría de Circuitos 1