
TOPOLOGÍA - departamento.us.esdepartamento.us.es/dgt/pd/t/apuntescompleto1112.pdf · Espacios...
87
TOPOLOGÍA Curso 2011/2012
Transcript of TOPOLOGÍA - departamento.us.esdepartamento.us.es/dgt/pd/t/apuntescompleto1112.pdf · Espacios...
TOPOLOGÍA
Curso 2011/2012

Capítulo 1
Espacios métricos
1.1. Medir la proximidad
Sea X un conjunto. Denotaremos por X×X al conjunto de los paresde elementos de X.
Definición 1.1.1. Una distancia sobre X es una aplicación d : X×X →R cumpliendo:
1. d(x, x′) ≥ 0, ∀x, x′ ∈ X,
2. d(x, x′) = d(x′, x), ∀x, x′ ∈ X (Propiedad simétrica),
3. d(x, x′) = 0 si y sólo si x = x′, ∀x, x′ ∈ X,
4. d(x, x′) ≤ d(x, x′′)+d(x′′, x′), ∀x, x′, x′′ ∈ X (Propiedad triangular),
Al par (X, d) se le llama espacio métrico. Si la condición (3) se sustituyepor
(3′) d(x, x) = 0,
entonces d se llama seudodistancia y el par (X, d) espacio seudométrico.
Ejemplo 1.1.2. (Análisis I) Se tomaX = R y se define d(x, x′) = |x−x′|.
Ejemplo 1.1.3. (Geometría) Se tomaX = R2 y se define d((x, y), (x′, y′)) =||(x, y) − (x′, y′)|| =
√(x− x′)2 + (y − y′)2.
Definición 1.1.4. Sea V un espacio vectorial sobre R. Una norma sobreV es una aplicación || · || : V → R cumpliendo:
1. ||v|| ≥ 0, ∀v ∈ V ,
2

CAPÍTULO 1. ESPACIOS MÉTRICOS 3
2. ||λv|| = |λ| · ||v||, ∀λ ∈ R, ∀v ∈ V ,
3. ||v|| = 0 si y sólo si v = 0, ∀v ∈ V ,
4. ||v + w|| ≤ ||v||+ ||w||, ∀v, w ∈ V .
Al par (V, || · ||) se le llama espacio normado.
Proposición 1.1.5. Si (V, || · ||) es un espacio normado, la aplicaciónd : V × V → R dada por d(v, w) = ||v − w|| es una distancia sobre V .
A (V, d) se le llama espacio métrico asociado al espacio normado(V, || · ||).
Demostración. Veremos a continuación que d cumple las condiciones quehacen a una aplicación distancia:
1. d(v, w) = ||v − w|| ≥ 0 por la propiedad 1 de la norma.
2. d(v, w) = ||v −w|| = ||(−1)(w − v)|| = | − 1| · ||w− v|| = ||w− v||,donde se ha usado la propiedad 2 de la norma en la tercera igualdad.
3. Por definición, d(v, w) = 0 si y sólo si ||v−w|| = 0. Por la propiedad3 de la norma, esto ocurre si y sólo si v − w = 0, es decir, v = w.
4. d(v, v′) = ||v − v′|| = ||v − v′′ + v′′ − v′|| ≤ ||v − v′′|| + ||v′′ − v′|| =d(v, v′′) + d(v′′, v′), donde se ha usado la propiedad 4 de la normapara conseguir la desigualdad.
Veremos a continuación algunos ejemplos de espacios normados y susdistancias asociadas.
Ejemplo 1.1.6. Si V = R y || · || =valor absoluto, entonces (V, || · ||) esun espacio normado con distancia asociada d(x, x′) = |x− x′|.
Ejemplo 1.1.7. Si V = R2 y || · || es la habitual en Geometría, es decir,la norma euclídea ||(x, y)|| =
√x2 + y2, entonces (V, || · ||) es un espacio
normado. Su distancia asociada, que llamaremos distancia euclídea ydenotaremos de, es de((x, y), (x
′, y′)) =√
(x− x′)2 + (y − y′)2.
Ejemplo 1.1.8. Si V = R2, entonces ||(x, y)||taxi = |x| + |y| es unanorma. La cuarta propiedad de la definición de norma se demostraríaasí: ||(x, y) + (x′, y′)||taxi = |x + x′| + |y + y′| ≤ |x| + |x′| + |y| + |y′| =||(x, y)||taxi + ||(x′, y′)||taxi.

CAPÍTULO 1. ESPACIOS MÉTRICOS 4
A esta norma se le llama norma taxi y a su distancia asociada dis-tancia taxi : dtaxi((x, y), (x
′, y′)) = |x− x′| + |y − y′|.En el plano R2, las distancias entre los puntos (0, 0) y (1, 1) son
de((0, 0), (1, 1)) =√
2 y dtaxi((0, 0), (1, 1)) = 2.
Figura 1.1:
Ejemplo 1.1.9. Si V = R2, ||(x, y)||max = max{|x|, |y|} es una norma.Probaremos a continuación su cuarta propiedad:
Se cumple que |x+ x′| ≤ |x|+ |x′| ≤ max{|x|, |y|}+ max{|x′|, |y′|} =||(x, y)||max + ||(x′, y′)||max. Podemos hacer lo mismo con |y + y′|, luegotenemos que
||(x, y)+(x′, y′)||max = max{|x+x′|, |y+y′|} ≤ ||(x, y)||max+||(x′, y′)||max.
Su distancia asociada es dmax((x, y), (x′, y′)) = max{|x−x′|, |y−y′|},
que llamaremos distancia del máximo.
Ejemplo 1.1.10. Si tomamos V = Rn, n ≥ 2, la norma euclídea es ahora||(x1, . . . , xn)|| =
√∑ni=1 x
2i . Su distancia asociada, que también llamare-
mos distancia euclídea, es de((x1, . . . , xn), (y1, . . . , yn)) =√∑n
i=1(xi − yi)2.Análogamente, las normas taxi y máximo para Rn son ||(x1, . . . , xn)||taxi =∑n
i=1 |xi| y ||(x1, . . . , xn)||max = max{|xi|; 1 ≤ i ≤ n}, siendo sus distan-cias asociadas dtaxi((x1, . . . , xn), (y1, . . . , yn)) =
∑ni=1 |xi − yi| y
dmax((x1, . . . , xn), (y1, . . . , yn)) = max{|xi − yi|; 1 ≤ i ≤ n}, respectiva-mente.
Ejemplo 1.1.11. V = {f : R → R; fes acotada} es un espacio vectorialcon:
Suma: (f + g)(x) = f(x) + g(x),
Producto por escalar: (λf)(x) = λf(x).

CAPÍTULO 1. ESPACIOS MÉTRICOS 5
Se define ||f ||∞ = sup{|f(x)|; x ∈ R}, que se demuestra que es norma:
1. ||f ||∞ ≥ 0 porque es un supremo de valores absolutos.
2. ||λf ||∞ = sup{|λ||f(x)|; x ∈ R} = |λ| sup{|f(x)|; x ∈ R} = |λ|||f ||∞.
3. Si ||f ||∞ = 0 = sup{ |f(x)|, x ∈ R}, entonces |f(x)| = 0, para todox ∈ R, luego f es la función nula θ(x) = 0, para todo x ∈ R.
4. ||f + g||∞ = sup{|f(x)+ g(x)|; x ∈ R}. Ahora bien, |f(x)+ g(x)| ≤|f(x)|+ |g(x)| ≤ sup{|f(x)|, x ∈ R}+sup{|g(x)|, x ∈ R} = ||f ||∞+||g||∞. Por tanto, ||f + g||∞ ≤ ||f ||∞ + ||g||∞.
La norma anterior se llama norma del supremo y su distancia asociada esd∞ = sup{|f(x) − g(x)|, x ∈ R}, que se denotará distancia del supremo.
Veremos a continuación con un ejemplo concreto cómo funcionan estanorma y distancia.
Ejemplo 1.1.12. Si f(x) = sen(x), entonces ||f ||∞ = 1. Si tomamosg(x) = cos(x), se tiene d∞(f, g) = 1.
Figura 1.2:
Se define la sucesión de funciones {fn} como fn = (1/n) sen(x) yse denota por θ a la función nula. Entonces d∞(fn, θ) = 1/n y la suce-sión {fn} se aproxima arbitrariamente a la constante cero en el espacio(V, d∞).
Definiremos a continuación otra norma:
Ejemplo 1.1.13. Si V = {f : [0, 1] → R; f continua}, entonces ||f ||1 =∫ 1
0|f(x)|dx es una norma cuya distancia asociada es d1(f, g) =
∫ 1
0|f(x)−
g(x)|dx.
1. ||f ||1 ≥ 0 porque |f(x)| ≥ 0 para todo 0 ≤ x ≤ 1.
2. ||λf ||1 =∫ 1
0|λ| · |f(x)|dx = |λ|
∫ 1
0|f(x)|dx = |λ| · ||f ||1.
CAPÍTULO 1. ESPACIOS MÉTRICOS 6
Figura 1.3:
3. Si ||f ||1 =∫ 1
0|f(x)|dx, entonces |f(x)| = 0 para todo x ∈ R, luego
f es la función nula θ(x) = 0 para todo x ∈ R.
4. ||f+g||1 =∫ 1
0|f(x)+g(x)|dx ≤
∫ 1
0(|f(x)|+|g(x)|)dx =
∫ 1
0|f(x)|dx+∫ 1
0|g(x)|dx = ||f ||1 + ||g||1.
En general, podemos definir ||f ||n = n
√∫ 1
0|f(x)|ndx.
Comprobaremos a continuación que las distancias d1 y d∞ son distin-tas.
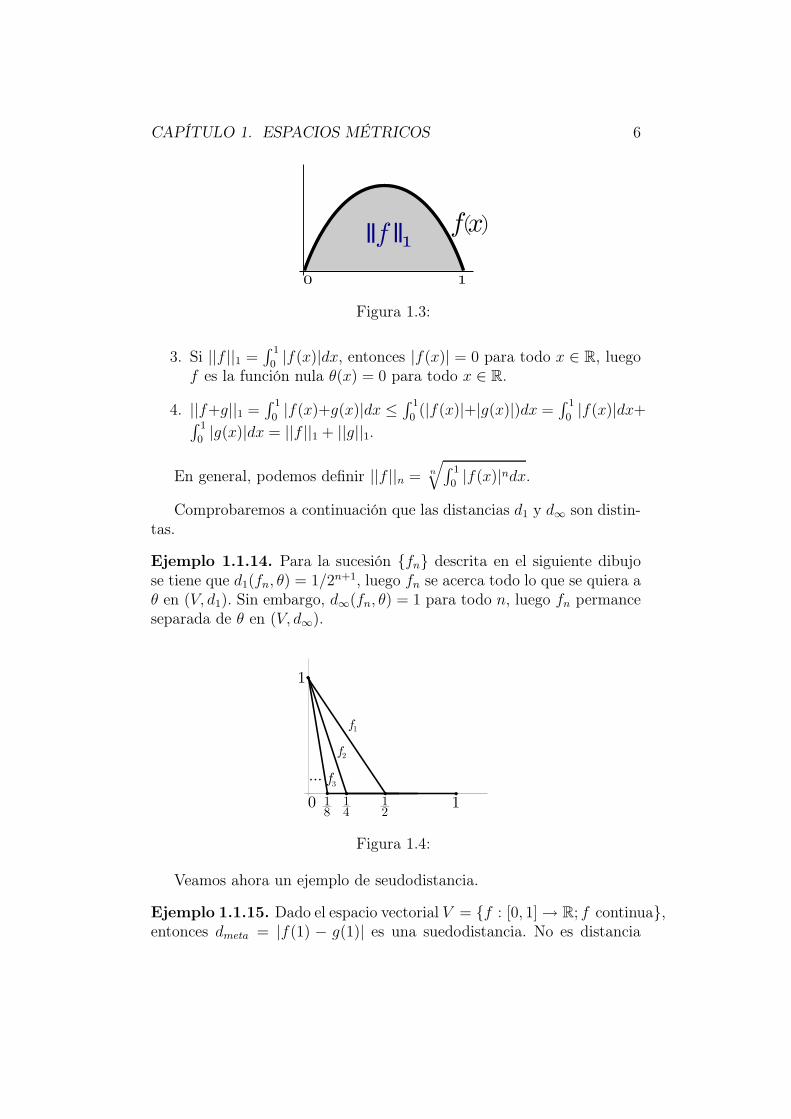
Ejemplo 1.1.14. Para la sucesión {fn} descrita en el siguiente dibujose tiene que d1(fn, θ) = 1/2n+1, luego fn se acerca todo lo que se quiera aθ en (V, d1). Sin embargo, d∞(fn, θ) = 1 para todo n, luego fn permanceseparada de θ en (V, d∞).
Figura 1.4:
Veamos ahora un ejemplo de seudodistancia.
Ejemplo 1.1.15. Dado el espacio vectorial V = {f : [0, 1] → R; f continua},entonces dmeta = |f(1) − g(1)| es una suedodistancia. No es distancia

CAPÍTULO 1. ESPACIOS MÉTRICOS 7
porque si tomamos dos funciones f, h que sean distintas pero que coin-cidan en el punto 1, entonces dmeta(f, h) = 0. Podemos darle un senti-do a esta seudodistancia si observamos una función creciente en V conf(0) = 0 puede ser considerada como la expresión del tiempo que tardaun corredor en pasar por cada punto de su carrera entre la salida en x = 0y la meta en x = 1. De esta forma dmeta mide la diferencia del tiempo dellegada.
Figura 1.5:
Definiremos ahora una distancia válida para cualquier conjunto.
Ejemplo 1.1.16. Dado un conjunto X, la aplicación d : X × X → R
definida por d(x, x′) =
{1, x 6= x′
0, x = x′es una distancia, que denotaremos
distancia discreta.
1. Trivial por definición.
2. d(x, x′) = d(x′, x) por definición.
3. d(x, x′) = 0 si y sólo si x = x′.
4. La aplicación d sólo puede tomar los valores 0 y 1, luego la únicaposibilidad de que la desigualdad d(x, x′) ≤ d(x, x′′) + d(x′′, x′)falle sería si d(x, x′) = 1 pero entonces d(x, x′′) = 0 = d(x′′, x′). Sinembargo, este caso no puede ocurrir porque d(x, x′′) = 0 = d(x′′, x′)implica x = x′ = x′′, luego d(x, x′) = 0.
Proposición 1.1.17. No existe ninguna norma en Rn cuya distanciaasociada sea la discreta.
Demostración. (R.A.) Supongamos que existiese tal norma asociada || · ||y tomemos x 6= 0 (donde 0 es el origen de Rn) y λ ∈ R, λ 6= 0. Entoncesλx 6= 0 y 1 = d(λx, 0) = ||λx−0|| = ||λx|| = |λ| · ||x|| = |λ|. Luego hemosprobado que |λ| = 1 para cualquier λ ∈ R, λ 6= 0. Contradicción.

CAPÍTULO 1. ESPACIOS MÉTRICOS 8
En el plano euclídeo (R2, deuclıdea)(plano), los círculos de centro unpunto x permiten medir la proximidad a ese punto.
Figura 1.6:
Esta observación lleva a la siguiente definición general
Definición 1.1.18. Sea (X, d) un espacio (seudo)métrico. Dados x ∈ Xy ε > 0, se llama bola abierta de centro x y radio ε a
Bd(x, ε) = {y ∈ X; d(x, y) < ε}.
Una bola cerrada de centro x y radio ε es
Bd[x, ε] = {y ∈ X; d(x, y) ≤ ε}.
Una esfera de centro x y radio ε es
Sd[x, ε] = {y ∈ X; d(x, y) = ε}.
Ejemplo 1.1.19. En la recta euclídea (R, de), tenemos Bde(x, ε) = {y ∈
R, |x− y| < ε} = (x− ε, x+ ε).
Ejemplo 1.1.20. En el plano euclídeo (R2, de), la bola Bde(0, ε) =
{(x1, x2) ∈ R2, de((x1, x2), 0) < ε} = {(x1, x2) ∈ R2,√x2
1 + x22 < ε} =
{(x1, x2) ∈ R2, x21 +x2
2 < ε2}, sería un círculo sin circunferencia de centro(0, 0) y radio ε.
Ejemplo 1.1.21. En (R2, dtaxi), la bola abierta de centro 0 y radio εes Bdtaxi
(0, ε) = {(x1, x2) ∈ R2, dtaxi((x1, x2), 0) < ε} = {(x1, x2) ∈R2, |x1| + |x2| < ε}.
Si x1, x2 ≥ 0, entonces |x1| + |x2| < ε implica x1 + x2 < ε.
CAPÍTULO 1. ESPACIOS MÉTRICOS 9
Figura 1.7:
Si x1, x2 ≤ 0, entonces |x1| + |x2| < ε implica −x1 − x2 < ε.Si x1 ≥ 0, x2 ≤ 0, entonces |x1| + |x2| < ε implica x1 − x2 < ε.Si x1 ≤ 0, x2 ≥ 0, entonces |x1| + |x2| < ε implica x2 − x1 < ε.Por tanto, Bdtaxi
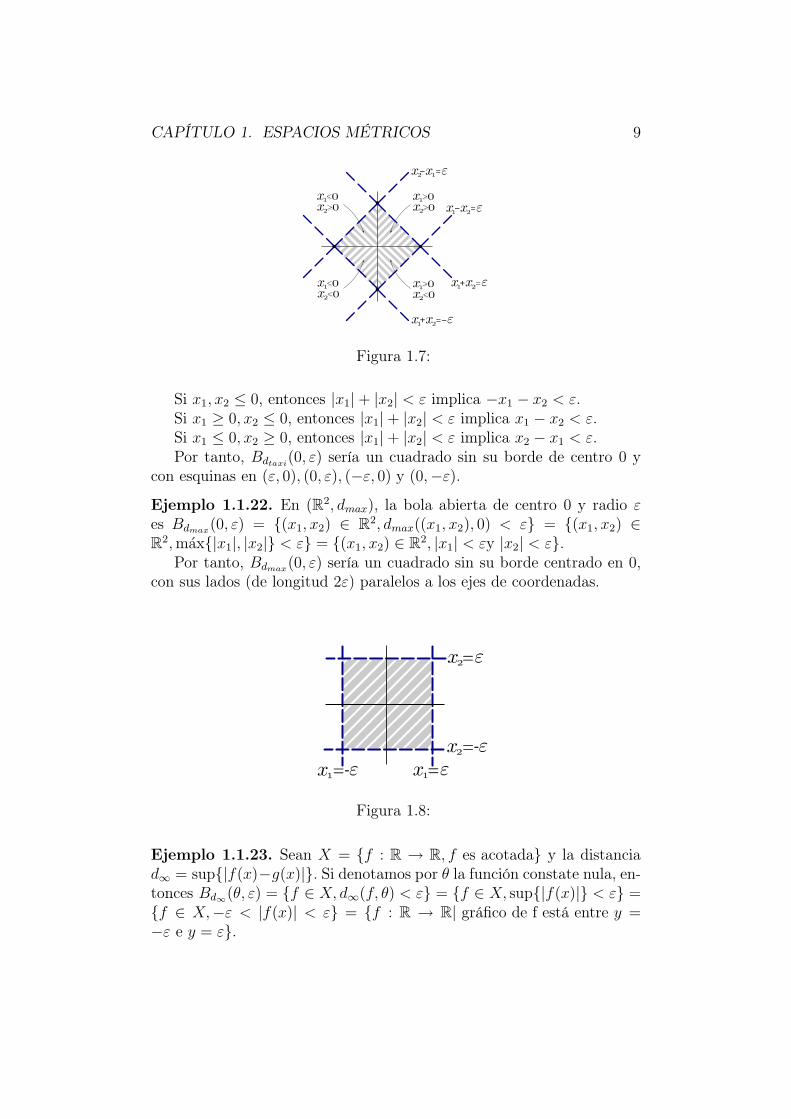
(0, ε) sería un cuadrado sin su borde de centro 0 ycon esquinas en (ε, 0), (0, ε), (−ε, 0) y (0,−ε).Ejemplo 1.1.22. En (R2, dmax), la bola abierta de centro 0 y radio εes Bdmax
(0, ε) = {(x1, x2) ∈ R2, dmax((x1, x2), 0) < ε} = {(x1, x2) ∈R2,max{|x1|, |x2|} < ε} = {(x1, x2) ∈ R2, |x1| < εy |x2| < ε}.
Por tanto, Bdmax(0, ε) sería un cuadrado sin su borde centrado en 0,
con sus lados (de longitud 2ε) paralelos a los ejes de coordenadas.
Figura 1.8:
Ejemplo 1.1.23. Sean X = {f : R → R, f es acotada} y la distanciad∞ = sup{|f(x)−g(x)|}. Si denotamos por θ la función constate nula, en-tonces Bd∞(θ, ε) = {f ∈ X, d∞(f, θ) < ε} = {f ∈ X, sup{|f(x)|} < ε} ={f ∈ X,−ε < |f(x)| < ε} = {f : R → R| gráfico de f está entre y =−ε e y = ε}.

CAPÍTULO 1. ESPACIOS MÉTRICOS 10
Figura 1.9:
Ejemplo 1.1.24. Si tomamos X = R2, la distancia discreta ddiscreta y el
punto θ = (0, 0), entonces Bddiscreta(θ, ε) =
{{θ}, ε ≤ 1R2, ε > 1
Proposición 1.1.25. (Propiedades de las bolas abiertas)Sea (X, d) un espacio (seudo)métrico. Se cumplen:
1. Dados ε > 0 y x ∈ X, x ∈ Bd(x, ε).
1’. Si 0 < ε′ < ε, entonces Bd(x, ε′) ⊆ Bd(x, ε).
2. Si y ∈ Bd(x, ε), donde x, ε son arbitrarios, entonces existe δ > 0con Bd(y, δ) ⊆ Bd(x, ε).
3. Si z ∈ Bd(x, ε)∩Bd(x′, ε′), entonces existe µ > 0 tal que Bd(z, µ) ⊆
Bd(x, ε) ∩ Bd(x′, ε′).
Demostración. 1. Como d(x, x) = 0 < ε, entonces x ∈ Bd(x, ε).
1’. Si y ∈ Bd(x, ε′), entonces d(x, y) < ε′ < ε. Por tanto, d(x, y) < ε y
concluimos que y ∈ Bd(x, ε).
2. Como y ∈ Bd(x, ε), entonces d(x, y) < ε y podemos definir δ :=ε− d(x, y) > 0. Veremos ahora que Bd(y, δ) ⊆ Bd(x, ε). En efecto,si p ∈ Bd(y, δ), entonces d(y, p) < δ y d(x, p) ≤ d(x, y) + d(y, p) <d(x, y)+δ = d(x, y)+ε−d(x, y) = ε. Hemos probado que d(x, p) <ε, es decir, que p ∈ Bd(x, ε).
3. Si z ∈ Bd(x, ε) ∩ Bd(x′, ε′), entonces:
• z ∈ Bd(x, ε), luego existe δ con Bd(z, δ) ⊆ Bd(x, ε) por elapartado (2).
• z ∈ Bd(x′, ε′), luego existe δ′ con Bd(z, δ
′) ⊆ Bd(x′, ε′) por el
apartado (2).
CAPÍTULO 1. ESPACIOS MÉTRICOS 11
Figura 1.10:
Figura 1.11:
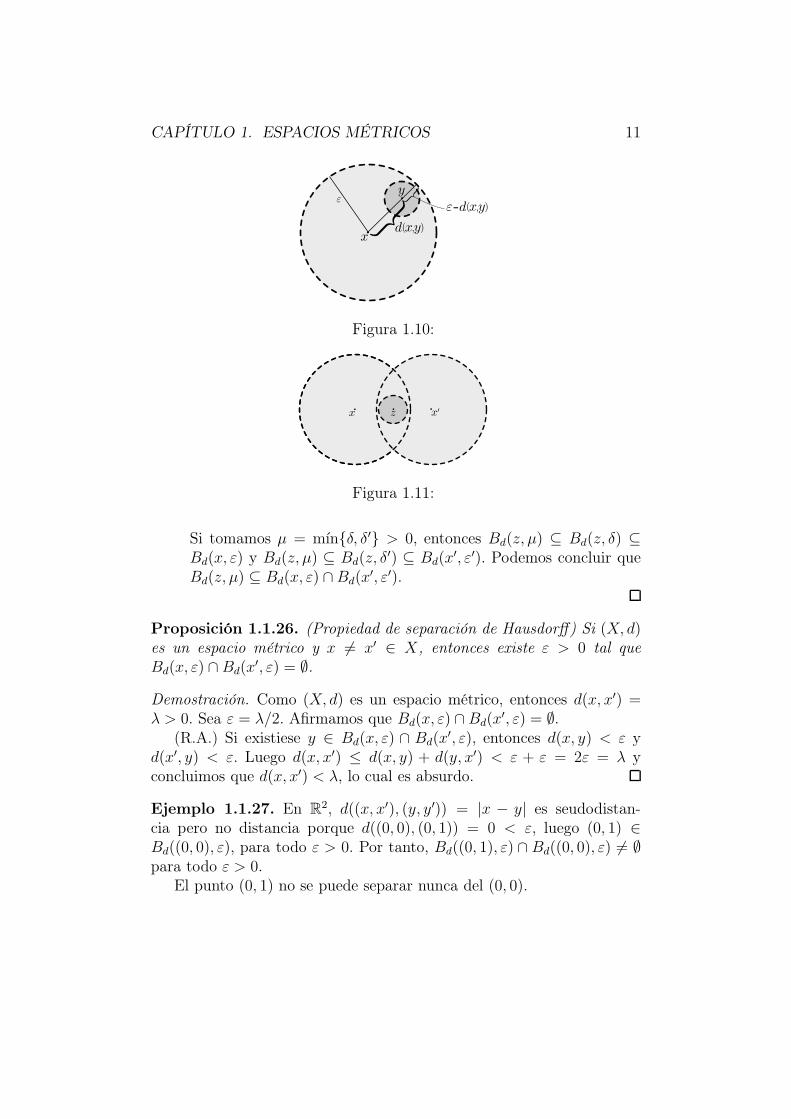
Si tomamos µ = mın{δ, δ′} > 0, entonces Bd(z, µ) ⊆ Bd(z, δ) ⊆Bd(x, ε) y Bd(z, µ) ⊆ Bd(z, δ
′) ⊆ Bd(x′, ε′). Podemos concluir que
Bd(z, µ) ⊆ Bd(x, ε) ∩Bd(x′, ε′).
Proposición 1.1.26. (Propiedad de separación de Hausdorff) Si (X, d)es un espacio métrico y x 6= x′ ∈ X, entonces existe ε > 0 tal queBd(x, ε) ∩ Bd(x
′, ε) = ∅.
Demostración. Como (X, d) es un espacio métrico, entonces d(x, x′) =λ > 0. Sea ε = λ/2. Afirmamos que Bd(x, ε) ∩ Bd(x
′, ε) = ∅.(R.A.) Si existiese y ∈ Bd(x, ε) ∩ Bd(x
′, ε), entonces d(x, y) < ε yd(x′, y) < ε. Luego d(x, x′) ≤ d(x, y) + d(y, x′) < ε + ε = 2ε = λ yconcluimos que d(x, x′) < λ, lo cual es absurdo.
Ejemplo 1.1.27. En R2, d((x, x′), (y, y′)) = |x − y| es seudodistan-cia pero no distancia porque d((0, 0), (0, 1)) = 0 < ε, luego (0, 1) ∈Bd((0, 0), ε), para todo ε > 0. Por tanto, Bd((0, 1), ε) ∩ Bd((0, 0), ε) 6= ∅para todo ε > 0.
El punto (0, 1) no se puede separar nunca del (0, 0).

CAPÍTULO 1. ESPACIOS MÉTRICOS 12
1.2. Conjuntos que “envuelven” a sus puntos
Un círculo abierto del plano contiene todos los puntos del plano querodean su centro hasta una cierta distancia (el radio del círculo), igual-mente una bola abierta de un espacio (seudo)métrico. Más aún, de acuer-do con la propiedad 1.1.25(2), una bola abierta cualquiera contiene todoslos puntos vecinos de cada uno de sus puntos hasta una cierta distancia(que varía según el punto elegido). Pero tambíén figuras de aspecto ge-ométrico irregular pueden “envolver´´ a algunos de sus puntos (incluso atodos): bastará que contenga alguna bola abierta, por pequeña que sea,centrada en cada uno de esos puntos.
Figura 1.12:
Para fijar ideas establecemos las siguientes definiciones
Definición 1.2.1. Sea (X, d) un espacio (seudo)métrico y A ⊆ X. Dec-imos que x ∈ X es un punto interior de A si existe ε > 0 tal queBd(x, ε) ⊆ A. En tal caso se dice que A es entorno de x en (X, d).
Se llama interior de A en (X, d), denotado por intA, a:
intA = {x ∈ X, x es interior a A}.
Un conjunto A ⊆ X se dice abierto en (X, d) si A = intA.
Proposición 1.2.2. 1. Se cumple que intA ⊆ A en todo espacio (seu-do)métrico (X, d).
2. Toda bola abierta en un espacio (seudo)métrico es un conjuntoabierto en (X, d).
CAPÍTULO 1. ESPACIOS MÉTRICOS 13
Demostración. 1. Si x ∈ intA, entonces existe ε > 0 conBd(x, ε) ⊆ A.Por el apartado 1 de la Proposición 1.1.25, x ∈ Bd(x, ε) ⊆ A, luegox ∈ A. Por tanto, intA ⊆ A.
2. Demostraremos que intBd(x, ε) = Bd(x, ε) por doble inclusión.
intBd(x, ε) ⊆ Bd(x, ε) por (1).
intBd(x, ε) ⊇ Bd(x, ε): Sea y ∈ Bd(x, ε). Por el apartado 2 de laProposición 1.1.25, existe δ > 0 tal que Bd(y, δ) ⊆ Bd(x, ε), luegoy ∈ intBd(x, ε).
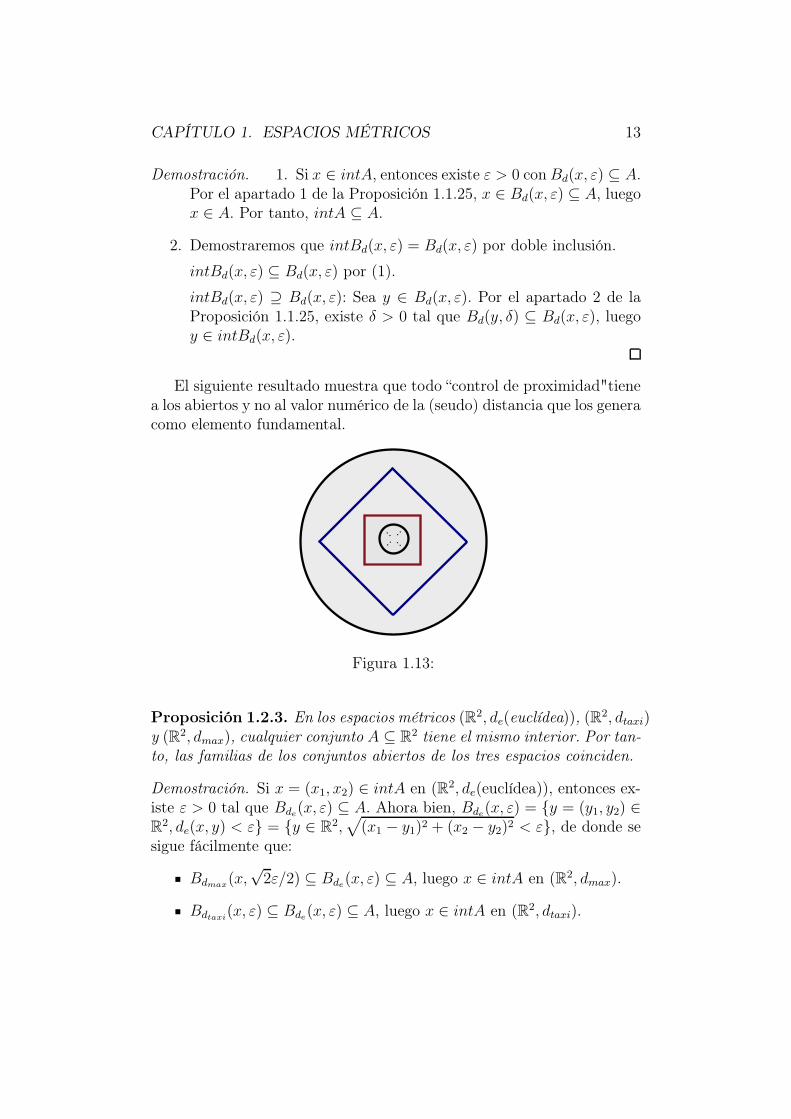
El siguiente resultado muestra que todo “control de proximidad"tienea los abiertos y no al valor numérico de la (seudo) distancia que los generacomo elemento fundamental.
Figura 1.13:
Proposición 1.2.3. En los espacios métricos (R2, de(euclídea)), (R2, dtaxi)y (R2, dmax), cualquier conjunto A ⊆ R2 tiene el mismo interior. Por tan-to, las familias de los conjuntos abiertos de los tres espacios coinciden.
Demostración. Si x = (x1, x2) ∈ intA en (R2, de(euclídea)), entonces ex-iste ε > 0 tal que Bde
(x, ε) ⊆ A. Ahora bien, Bde(x, ε) = {y = (y1, y2) ∈
R2, de(x, y) < ε} = {y ∈ R2,√
(x1 − y1)2 + (x2 − y2)2 < ε}, de donde sesigue fácilmente que:
Bdmax(x,
√2ε/2) ⊆ Bde
(x, ε) ⊆ A, luego x ∈ intA en (R2, dmax).
Bdtaxi(x, ε) ⊆ Bde
(x, ε) ⊆ A, luego x ∈ intA en (R2, dtaxi).

CAPÍTULO 1. ESPACIOS MÉTRICOS 14
Figura 1.14:
Figura 1.15:
Sea x = (x1, x2) ∈ intA en (R2, dtaxi). Entonces existe ε > 0 tal queBdtaxi
(x, ε) ⊆ A. Como Bdtaxi(x, ε) = {y = (y1, y2) ∈ R2, dtaxi(x, y) <
ε} = {y ∈ R2, |x1 − y1| + |x2 − y2| < ε}, tenemos que:
Bde(x,
√2ε/2) ⊆ Bdtaxi
(x, ε) ⊆ A, luego x ∈ intA en (R2, de).
Figura 1.16:
Bdmax(x, ε/2) ⊆ Bde
(x,√
2ε/2) ⊆ Bdtaxi(x, ε) ⊆ A, luego x ∈ intA
en (R2, dmax).
El resto se deja como ejercicio (bastaría probar que si x ∈ intA en(R2, dmax), entonces x ∈ intA en (R2, de) y (R2, dtaxi)).
Corolario 1.2.4. Las bolas abiertas de (R2, de), son abiertos en (R2, dtaxi)y (R2, dmax). Análogamente para el resto de los casos.
Nota 1.2.5. Se deja como ejercicio generalizar los dos resultados ante-riores al espacio Rn para todo n ≥ 2.

CAPÍTULO 1. ESPACIOS MÉTRICOS 15
Proposición 1.2.6. Sea (X, d) un espacio (seudo)métrico. Entonces:
1. A ⊆ X es abierto en (X, d) si y sólo si A es entorno de todos suspuntos.
2. N ⊆ X es entorno de x en (X, d) si y sólo si existe un abierto Gen (X, d) con x ∈ G ⊆ N .
3. x es un punto interior de A en (X, d) si y sólo si existe un abiertoG con x ∈ G ⊆ A.
Demostración. 1. Si A ⊆ X es abierto, entonces A = intA. Por tanto,dado x ∈ A se tiene que x ∈ intA. Es decir, que A es entorno detodos x ∈ A.
Recíprocamente, si A es entorno de todo x ∈ A, entonces x ∈ intA,para todo x ∈ A por definición de entorno. Luego A ⊆ intA y,como la inclusión contraria siempre es cierta, concluimos que A esabierto.
2. Si N ⊆ X es entorno de x, entonces existe un ε > 0 tal queBd(x, ε) ⊆ N . Como las bolas abiertas son abiertos, entonces pode-mos definir G := Bd(x, ε), que es un abierto en (X, d). Como x ∈ G(por ser el centro de la bola), entonces x ∈ G ⊆ N .
Recíprocamente, supongamos que x ∈ G ⊆ N con G abierto. Porser G abierto, entonces G = intG y x ∈ intG. Por la definición deinterior, existe ε > 0 tal que Bd(x, ε) ⊆ G ⊆ N , luego x ∈ intN yobtenemos que N es entorno de x.
3. Por definición, x ∈ intA si y sólo si A es entorno de x.
Proposición 1.2.7. (Propiedades del interior) Sea (X, d) un espacio(seudo)métrico. Entonces:
1. intA ⊆ A.
2. Si A ⊆ B, entonces intA ⊆ intB.
3. int(A1 ∩ . . . ∩ An) = intA1 ∩ . . . ∩ intAn.
4. int(intA) = intA. En particular, intA siempre es abierto.
Demostración. 1. Ya hecha en el apartado 2 de 1.2.2.

CAPÍTULO 1. ESPACIOS MÉTRICOS 16
2. Si x ∈ intA, entonces existe ε > 0 con Bd(x, ε) ⊆ A ⊆ B. Portanto, Bd(x, ε) ⊆ B y concluimos que x ∈ intB.
3. Demostraremos int(A1 ∩ . . .∩An) = intA1 ∩ . . .∩ intAn por dobleinclusión.
Siempre es cierto que A1 ∩ . . . ∩ An ⊆ Ai, (1 ≤ i ≤ n). Por tanto,int(A1 ∩ . . .∩An) ⊆ intAi, para todo i, y obtenemos int(A1 ∩ . . .∩An) ⊆ intA1 ∩ . . . ∩ intAn.
Si x ∈ intA1 ∩ . . . ∩ intAn, entonces x ∈ intAi para todo 1 ≤i ≤ n. Para cada i existe δi > 0 de forma que Bd(x, δi) ⊆ Ai. Sitomamos δ0 = mın{δi}1≤i≤n, Bd(x, δ0) ⊆ Bd(x, δi) ⊆ Ai, ∀i. Portanto, Bd(x, δ0) ⊆ ∩n
i=1Ai y concluimos que x ∈ ∩ni=1Ai.
4. Por el primer apartado, intA ⊆ A. Por el segundo, int(intA) ⊆intA. Veamos a continuación la otra inclusión.
Si x ∈ intA, entonces existe ε > 0 tal que Bd(x, ε) ⊆ A. Queremosprobar que x ∈ int(intA), es decir, que existe δ > 0 con Bd(x, δ) ⊆intA.
Ahora bien, nos sirve como δ el propio ε porque Bd(x, ε) ⊆ intA. Enefecto, dado y ∈ Bd(x, ε), por el apartado 2 de la proposición 1.1.25,existe µ > 0 on Bd(y, µ) ⊆ Bd(x, ε) ⊆ A. Por tanto, y ∈ intA yhemos probado que Bd(x, ε) ⊆ intA.
Proposición 1.2.8. (Propiedades básicas de los conjuntos abiertos enun espacio (seudo)métrico). Dado un espacio (seudo)métrico (X, d), secumplen:
1. Los conjuntos ∅ y X son abiertos en (X, d).

CAPÍTULO 1. ESPACIOS MÉTRICOS 17
2. Si A1, . . . , An son abiertos en (X, d), entonces A1∩. . .∩An tambiénes abierto.
3. Si {Aα}α∈Λ es una familia cualquiera de abiertos en (X, d), en-tonces ∪α∈ΛAα también lo es.
Demostración. 1. El conjunto X es abierto en (X, d) porque dadosx ∈ X y ε > 0 cualesquiera, Bd(x, ε) ⊆ X por ser X el espaciototal, luego x ∈ intX, ∀x ∈ X.
Por otra parte, ∅ está contenido en cualquier conjunto, luego ∅ ⊆int∅. La otra inclusión siempre es cierta, luego ∅ = int∅ y con-cluimos que ∅ es abierto.
2. Si A1, . . . , An son abiertos en (X, d), entonces intAi = Ai paratodo 1 ≤ i ≤ n. Por la proposición anterior, obtendríamos que∩n
i=1Ai = ∩ni=1intAi = int(∩n
i=1Ai), luego ∩ni=1Ai es abierto.
3. Si {Aα}α∈Λ es una familia cualquiera de abiertos en (X, d), quere-mos probar que int(∪α∈ΛAα) = ∪α∈ΛAα.
La inclusión int(∪α∈ΛAα) ⊆ ∪α∈ΛAα es siempre cierta.
Veremos ahora que la otra inclusión también se cumple. Como Aα
es abierto, ∪α∈ΛAα = ∪α∈ΛintAα. El conjunto Aα está contenidoen ∪α∈ΛAα, luego intAα ⊆ int(∪α∈ΛAα), ∀α ∈ Λ por la proposi-ción 1.2.7. Por tanto, ∪α∈ΛintAα ⊆ int(∪α∈ΛAα) y concluimos que∪α∈ΛAα ⊆ int(∪α∈ΛAα).
Capítulo 2
Espacios topológicos
En el capítulo anterior vimos que distacias distintas podían dar lugara un mismo çontrol de proximidad". Por tanto debe existir una nociónsubyacente a la de distancia que nos lleve a la fundamentación general dela idea de proximidad. Esta estructura es la de topología como colecciónde subconjuntos sujetos a las condiciones que se reflejan en la propiedadesbásicas de los conjuntos abiertos de los espacios (seudo)métricos en laproposición 1.2.8. El relevo de una (seudo)distancia por la familia deabiertos permite establecer sobre un conjunto una estructura de proxim-idad sin valores numéricos.
2.1. La proximidad sin distancia
Definición 2.1.1. Dado un conjunto X cualquiera, se llama topologíasobre X a cualquier familia T de subconjuntos de X cumpliendo:
1. Los conjuntos ∅ y X están en T .
2. Si A1, . . . , An están en T , entonces ∩ni=1Ai también está en T .
3. Si {Aα}α∈Λ está formada por conjuntos en T , entonces ∪α∈ΛAα
también está en T .
Al par (X, T ) se le llama espacio topológico. Los conjuntos de T se llamanabiertos del espacio topológico (X, T ).
Ejemplo 2.1.2. Si (X, d) es un espacio (seudo)métrico, entonces la fa-milia Td = {A ⊆ X;A es abierto en (X, d)} es una topología sobre X,llamada topología asociada a la distancia d. Esto es una consecuencia in-mediata de las propiedades básicas de los conjuntos abiertos en espacios(seudo)métricos.
18

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 19
Nota 2.1.3. Se cumple que Tdeuclıdea= Tdtaxi
= Tdmax, es decir, que el
espacio topológico asociado a las tres distancias es el mismo.
Ejemplo 2.1.4. Sea X un conjunto cualquiera y T la familia formadapor ∅ y todos los A ⊆ X con X − A finitos (Topología de Zariski ocofinita). Comprobaremos a continuación que T es topología sobre X:
1. ∅ ∈ T por definición.
X ∈ T porque X −X = ∅, que tiene 0 elementos.
2. Dados A1, . . . , An ∈ T , tenemos dos casos posibles:
Si algún Ai = ∅, entonces A1 ∩ . . . ∩An = ∅ ∈ T .
Si Ai 6= ∅, para todo 1 ≤ i ≤ n, entonces X − Ai es unconjunto finito para todo 1 ≤ i ≤ n. Como X − (∩n
i=1Ai) =∪n
i=1(X − Ai) es unión finita de conjuntos finitos, entonces esfinito y concluimos que ∩n
i=1Ai ∈ T .
3. Si {Aα}α∈Λ con Aα ∈ T para todo α ∈ Λ, queremos probar que∪α∈ΛAα ∈ T . Distinguiremos dos casos:
Si Aα = ∅ para todo α ∈ Λ, entonces ∪α∈ΛAα = ∅ ∈ T .
Si Aα06= ∅ para algún α0, entonces X − Aα0
es finito. Ahorabien, X − (∪α∈ΛAα) = ∩α∈Λ(X − Aα) ⊆ X − Aα0
(que esfinito), luego X − (∪α∈ΛAα) es finito y ∪α∈ΛAα ∈ T .
Proposición 2.1.5. Si X es infinito, no existe ninguna distancia d so-bre X cuyos abiertos sean los conjuntos que aparecen en la topología deZariski.
Demostración. (R.A.) Supongamos que existiese tal distancia d con Td =T . Consideremos x, x′ ∈ X, con x 6= x′. Por la propiedad de separaciónde Hausdorff, existe ε > 0 con Bd(x, ε)∩Bd(x
′, ε) = ∅. Tomando comple-mentarios, obtendríamos que X = X − ∅ = X − (Bd(x, ε) ∩ Bd(x
′, ε)) =(X − Bd(x, ε)) ∪ (X − Bd(x
′, ε)) sería un conjunto infinito (porque porhipótesis X lo es).
Ahora bien, cada bola es un abierto en Td = T y x ∈ Bd(x, ε) 6=∅, luego X − Bd(x, ε) y X − Bd(x
′, ε) son conjuntos finitos. Por tanto,(X−Bd(x, ε))∪(X−Bd(x
′, ε)) sería un conjunto finito. Contradicción.
Nota 2.1.6. Se deja como ejercicio el demostrar que tampoco existe unaseudodistancia d sobre un conjunto infinito X para la cual la topologíade Zariski sea la familia de abiertos de (X, d).

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 20
2.2. El interior de un conjunto en un espacio
topológico
Hemos basado la definición de espacio topológico en la noción de con-junto abierto. Nuestra experiencia con los espacios (seudo)métricos nosdice que debería existir una idea de interior en un espacio topológico deforma que los abiertos de ese espacio quedasen caracterizados como aquel-los conjuntos que coinciden con su interior como así ocurre en los espacios(seudo)métricos. La Proposición 1.2.6(3) sugiere la siguiente definición.
Definición 2.2.1. Sea (X, T ) un espacio topológico. Si A ⊆ X y x ∈ X,decimos que x es interior a A en (X, T ) si existe un G en T con x ∈G ⊆ A. En particular, ∈ A.
Se llama interior del conjunto A en (X, T ) al conjunto intA = {x ∈X; x es interior a A}.
Nota 2.2.2. Obsérvese que por definición, siempre intA ⊆ A.
Proposición 2.2.3. El conjunto A está en T si y sólo si A = intA.
Demostración. Si A está en T , todo a ∈ A cumple que a ∈ A ⊆ A,luego a ∈ intA. Como A ⊆ intA y la otra inclusión se cumple siempre,entonces A = intA.
Recíprocamente, si intA = A, entonces todo a ∈ A cumple que a ∈intA, es decir, que existe Ga en T con a ∈ Ga ⊆ A. Como A = ∪a∈A{a} ⊆∪a∈AGa ⊆ A, luego A = ∪a∈AGa, que está en T por la tercera propiedadde la definición de topología.
Ahora veremos que las propiedades del interior en un espacio (seu-do)métrico se mantienen en los espacios topológicos.
Proposición 2.2.4. Sea (X; T ) un espacio topológico. Entonces se cumplen:
1. intA ⊆ A.
2. Si A ⊆ B, entonces intA ⊆ intB.
3. int(A1 ∩ . . . ∩ An) = intA1 ∩ . . . ∩ intAn.
4. int(intA) = intA. En particular, intA siempre es abierto.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 21
Demostración. (1) es la Nota 2.2.2. Para demostrar (2), si x ∈ intAexiste un abierto G con x ∈ G ⊆ A ⊆ B; luego x ∈ intB. Así pues,intA ⊆ intB.
De acuerdo con (2), y como A1 ∩ . . . An ⊆ Ai para cada 1 ≤ i ≤ n,tenemos int(A1 ∩ . . . An) ⊆ intAi, y por tanto int(A1 ∩ . . . An) ⊆ intA1 ∩intA2 · · ·∩intAn. Para la otra inclusión, sea x ∈ intA1∩intA2 · · ·∩intAn.Por definición, para cada i ≤ n existe un abierto Gi con x ∈ Gi ⊆ Ai.Por tanto, G = G1∩· · ·∩Gn es un abierto y x ∈ G ⊆ A1 ∩· · ·∩An. Estoprueba que x ∈ int(A1 ∩ · · ·∩An). Esto concluye la demostración de (3).
Finalmente, tenemos int(intA) ⊆ intA por (1). Además, si x ∈ intAexiste un abierto G con x ∈ G ⊆ A. Aplicando la Proposición 2.2.3 yla propiedad (2), tenemos x ∈ G = intG ⊆ intA. Consecuentemente, ladefinición de interior nos da x ∈ int(intA).
Definición 2.2.5. Dado N ⊆ X, decimos que N es entorno de x ∈ Xen el espacio topológico (X, T ) si x ∈ intN .
Proposición 2.2.6. A está en T si y sólo si es entorno de todos suspuntos.
Demostración. Se deja como ejercicio.
Definición 2.2.7. Dado (X, T ) un espacio topológico, se dice que x ∈ Aes un punto aislado en A ⊆ X si existe G en T con x ∈ G tal queG ∩ A = {x}.
En particular, x se dice aislado en X si existe G en T con G = {x}.
2.3. La clausura de un conjunto. Conjuntos
cerrados
Si un punto x ∈ A no es aislado en A, entonces para todos G en T yx ∈ G se cumple que G ∩ A 6= {x}, es decir, que (G− {x}) ∩ A 6= ∅.
Un punto no aislado se dice punto de acumulación; esto es
Definición 2.3.1. Dado un espacio topológico (X, T ) y A ⊆ X, decimosque x ∈ X es punto de acumulación de A si para todo abierto G en (X, T )con x ∈ G, se cumple que (G− {x}) ∩ A 6= ∅.Proposición 2.3.2. (Caracterización de puntos de acumulación en es-pacios métricos) Dados (X, d) un espacio métrico y A ⊆ X, el puntox ∈ X es de acumulación de A si y sólo si todo abierto G en (X, d)contiene infinitos puntos de A.
CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 22
Demostración. Si todo G contiene infinitos puntos de A, entonces el con-junto (G − {x}) ∩ A contiene también infinitos puntos. En particular,(G− {x}) ∩A 6= ∅, luego x es de acumulación de A.
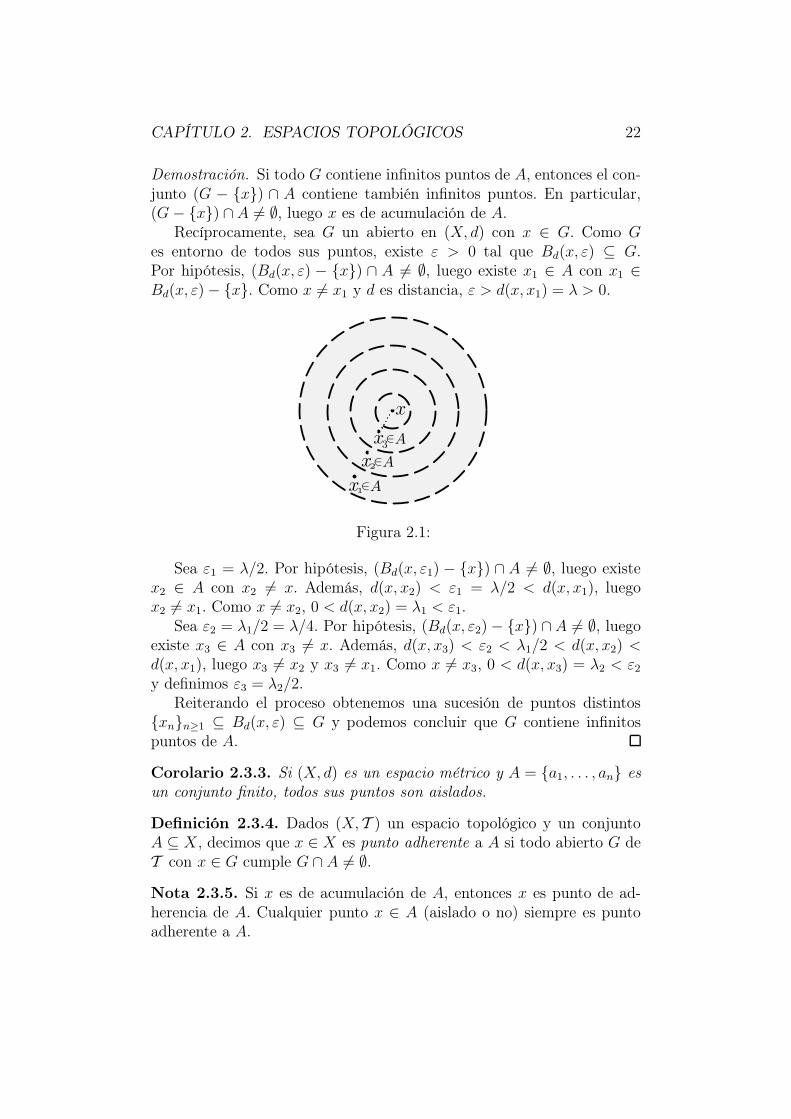
Recíprocamente, sea G un abierto en (X, d) con x ∈ G. Como Ges entorno de todos sus puntos, existe ε > 0 tal que Bd(x, ε) ⊆ G.Por hipótesis, (Bd(x, ε) − {x}) ∩ A 6= ∅, luego existe x1 ∈ A con x1 ∈Bd(x, ε) − {x}. Como x 6= x1 y d es distancia, ε > d(x, x1) = λ > 0.
Figura 2.1:
Sea ε1 = λ/2. Por hipótesis, (Bd(x, ε1) − {x}) ∩ A 6= ∅, luego existex2 ∈ A con x2 6= x. Además, d(x, x2) < ε1 = λ/2 < d(x, x1), luegox2 6= x1. Como x 6= x2, 0 < d(x, x2) = λ1 < ε1.
Sea ε2 = λ1/2 = λ/4. Por hipótesis, (Bd(x, ε2) − {x}) ∩A 6= ∅, luegoexiste x3 ∈ A con x3 6= x. Además, d(x, x3) < ε2 < λ1/2 < d(x, x2) <d(x, x1), luego x3 6= x2 y x3 6= x1. Como x 6= x3, 0 < d(x, x3) = λ2 < ε2
y definimos ε3 = λ2/2.Reiterando el proceso obtenemos una sucesión de puntos distintos
{xn}n≥1 ⊆ Bd(x, ε) ⊆ G y podemos concluir que G contiene infinitospuntos de A.
Corolario 2.3.3. Si (X, d) es un espacio métrico y A = {a1, . . . , an} esun conjunto finito, todos sus puntos son aislados.
Definición 2.3.4. Dados (X, T ) un espacio topológico y un conjuntoA ⊆ X, decimos que x ∈ X es punto adherente a A si todo abierto G deT con x ∈ G cumple G ∩ A 6= ∅.
Nota 2.3.5. Si x es de acumulación de A, entonces x es punto de ad-herencia de A. Cualquier punto x ∈ A (aislado o no) siempre es puntoadherente a A.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 23
Definición 2.3.6. Se llama clausura de A al conjunto
A = {x ∈ X; x es adherente a A}.Por la nota anterior, siempre se cumple A ⊆ A. Un conjunto A se llamacerrado en (X, T ) si A = A.
Ejemplo 2.3.7. En al recta euclídea (R, euclídea), el supremo y el ínfi-mo de un conjunto A (si existen) son puntos adherentes a A; en particular,si A es cerrado tiene mínimo y máximo, respectivamente. Sea x0 el ínfi-mo de A, por la definición de ínfimo, para todo ǫ > 0, siempre hay algúnpunto aǫ ∈ A con x0 ≤ aǫ ≤ x0 + ǫ. Por otro lado, si G es un abiertoeuclídeo con x0 ∈ G existe ǫ0 > 0 con (x0 − ǫ0, x0 + ǫ0) ⊆ G, y por tantoaǫ/2 ∈ (x0 − ǫ0, x0 + ǫ0) ∩ A ⊆ G ∩A. Tenemos así que x0 ∈ A.
Si ahora x1 es el supremo, tenemos un elemento a′ǫ ∈ A con x1 − ǫ ≤a′ǫ ≤ x1 y se razona igual que en caso anterior para llegar a que todoabierto euclídeo que contega a x1 corta a A; es decir, x1 ∈ A.
Proposición 2.3.8. Sea (X, T ) un espacio topológico. Entonces, paratodo A ⊆ X, se tiene:
A = (A−A′) ∪A′
donde A′ = {x ∈ X, x es punto de acumulación}. Obsérvese que A − A′
es exactamente el conjunto de puntos asilados de A.
Demostración. Veamos la contención hacia la derecha. Si x ∈ A, distin-guimos:
-x ∈ A′, luego hemos terminado.-x 6∈ A′, luego existe G abierto, con x ∈ G y (G − {x}) ∩ A = ∅.
Entonces, x es el único punto en G ∩ A. Luego, x ∈ A − A′. Por tanto,x ∈ (A− A′) ∪ A′.
Para la otra contención, si x ∈ (A−A′) ∪A′, distinguimos:-x ∈ A− A′, luego x ∈ A ⊆ A, quedando demostrado.-x ∈ A′. Entonces, para todo G abierto, con x ∈ G, se verifica que
(G− {x}) ∩A = ∅, por lo que G ∩ A 6= ∅. Por tanto, x ∈ A.
2.4. Dualidad interior/clausura y abierto/cerrado
En esta sección veremos que en cualquier espacio topológico el inte-rior y la clausura se determinan recíprocamente; es decir, basta conocerlos interiores de los subconjuntos de un espacio topológico para cono-cer sus clausuras y recíprocamente. Exactamente se tiene la siguienteproposición:

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 24
Proposición 2.4.1. (Dualidad interior/clausura)Sea (X, T ) un espacio topológico. Dado A ⊆ X se tiene:1. A = X − int(X − A).2. int(A) = X − (X − A).
Demostración. 1. x ∈ A ⇐⇒ para todo G abierto de (X, T ), con x∈ G,G ∩ A 6= ∅ ⇐⇒ para todo G abierto de (X, T ), con x ∈ G,G *X −A⇐⇒ x 6∈ int(X − A) ⇐⇒ x ∈ X − int(X − A).
2. A partir del apartado anterior, cambiando A por X − A.
Como consecuencia inmediata se tiene.
Proposición 2.4.2. (Dualidad abierto-cerrado) En cualquier espaciotopológico (X, T ) un conjunto A es abierto si y sólo si su complemen-tario X −A es cerrado
Demostración. Tenemos, A abierto ⇐⇒ A = int(A) ⇐⇒(2) A = X −(X −A) ⇐⇒ X − A = (X − A) ⇐⇒ X −A es cerrado.
A partir de las propiedades del interior y la dualidad en la Proposi-ción 2.4.1 podemos demostrar las siguientes propiedades generales de laclausura. Aquí las demostraremos directamente, dejando como ejercicioel hacerlo como se ha indicado anteriormente.
Proposición 2.4.3. (Propiedades de la clausura)Sea (X, T ) un espacio topológico. Se cumple:1. Si A ⊆ X entonces A ⊆ A.2. Si A ⊆ B entonces A ⊆ B.3. A1 ∪ ... ∪ An = A1 ∪ ... ∪ An.
4. A = A. En particular, A siempre es cerrado.
Demostración. 1. Ya lo hemos observado antes.2. Sea x ∈ A, entonces, para todo abierto G de (X, T ) con x ∈ G se
tiene que G ∩ A 6= ∅. Como A ⊆ B, entonces G ∩ A ⊆ G ∩ B. Por lotanto, G ∩ B 6= ∅, y de ahí deducimos que x ∈ B. Luego A ⊆ B.
3. Por el apartado anterior, sabemos que si Ai ⊆ A1 ∪ ...∪An, ∀i, en-tonces, Ai ⊆ A1 ∪ ... ∪An, para todo i. Por tanto,
⋃ni=1Ai ⊆ A1 ∪ ... ∪An.
Para la otra contención, sea x ∈ A1 ∪ ... ∪ An, por definición se tieneque si G es cualquier abierto de (X, T ) con x ∈ G, se tiene que G∩ (A1 ∪... ∪ An) 6= ∅. Ahora, por reducción al absurdo:
Si x 6∈ A1 ∪ ... ∪ An, entonces x 6∈ Ai, ∀i. De este modo, existirá Gi
abierto, con x ∈ Gi y Gi ∩ Ai = ∅, ∀i. Ahora, sea Go =⋂n
i=1Gi, éste
CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 25
es un abierto con x ∈ Go. Llegamos así a contradicción con G0 ∩ Ai ⊆Gi ∩Ai = ∅, ∀i, implicando G0 ∩ (A1 ∪ ...∪An) = ∅, que no se puede dar.
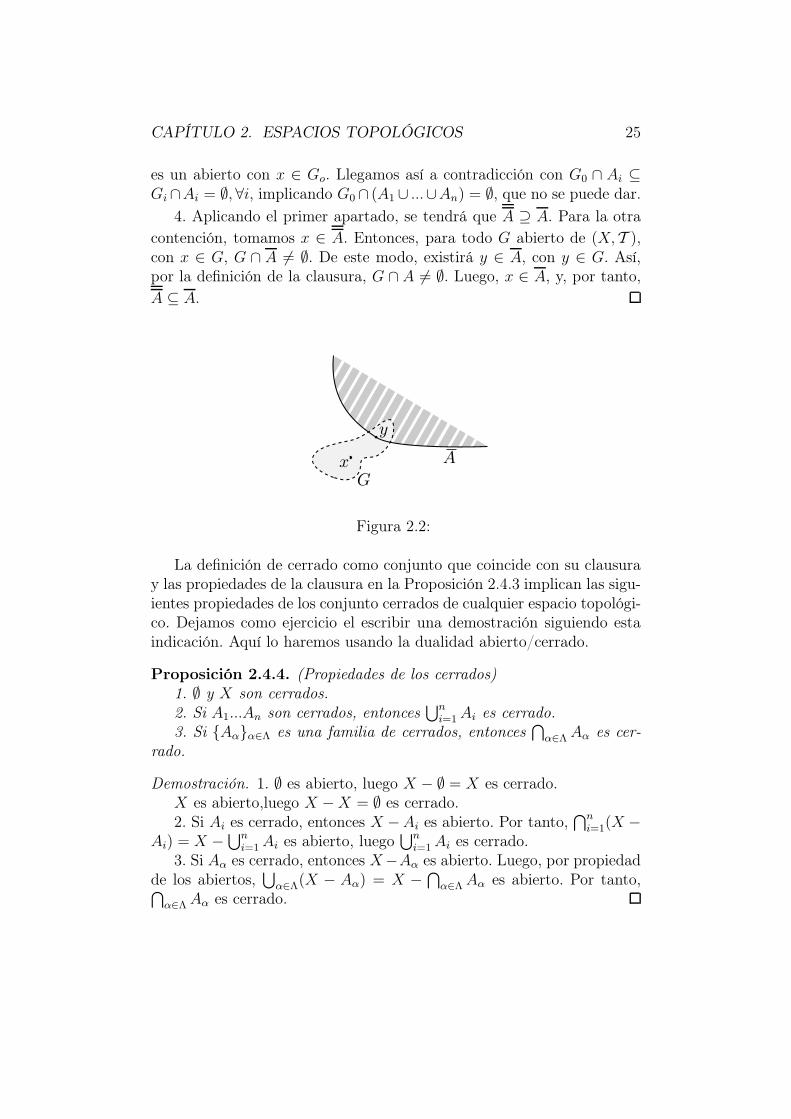
4. Aplicando el primer apartado, se tendrá que A ⊇ A. Para la otra
contención, tomamos x ∈ A. Entonces, para todo G abierto de (X, T ),con x ∈ G, G ∩ A 6= ∅. De este modo, existirá y ∈ A, con y ∈ G. Así,por la definición de la clausura, G ∩ A 6= ∅. Luego, x ∈ A, y, por tanto,
A ⊆ A.
Figura 2.2:
La definición de cerrado como conjunto que coincide con su clausuray las propiedades de la clausura en la Proposición 2.4.3 implican las sigu-ientes propiedades de los conjunto cerrados de cualquier espacio topológi-co. Dejamos como ejercicio el escribir una demostración siguiendo estaindicación. Aquí lo haremos usando la dualidad abierto/cerrado.
Proposición 2.4.4. (Propiedades de los cerrados)1. ∅ y X son cerrados.2. Si A1...An son cerrados, entonces
⋃ni=1Ai es cerrado.
3. Si {Aα}α∈Λ es una familia de cerrados, entonces⋂
α∈ΛAα es cer-rado.
Demostración. 1. ∅ es abierto, luego X − ∅ = X es cerrado.X es abierto,luego X −X = ∅ es cerrado.2. Si Ai es cerrado, entonces X −Ai es abierto. Por tanto,
⋂ni=1(X −
Ai) = X − ⋃ni=1Ai es abierto, luego
⋃ni=1Ai es cerrado.
3. Si Aα es cerrado, entonces X−Aα es abierto. Luego, por propiedadde los abiertos,
⋃α∈Λ(X − Aα) = X − ⋂
α∈ΛAα es abierto. Por tanto,⋂α∈ΛAα es cerrado.
CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 26
2.5. Convergencia de sucesiones en un es-
pacio topológico. Caracterización de la
clausura en los espacios (seudo)métricos
Como los abiertos que continen a un punto x de un espacio topológicoactuan como filtros de la proximidad a x, la siguiente definición precisala idea de acercarse a x mediante sucesiones.
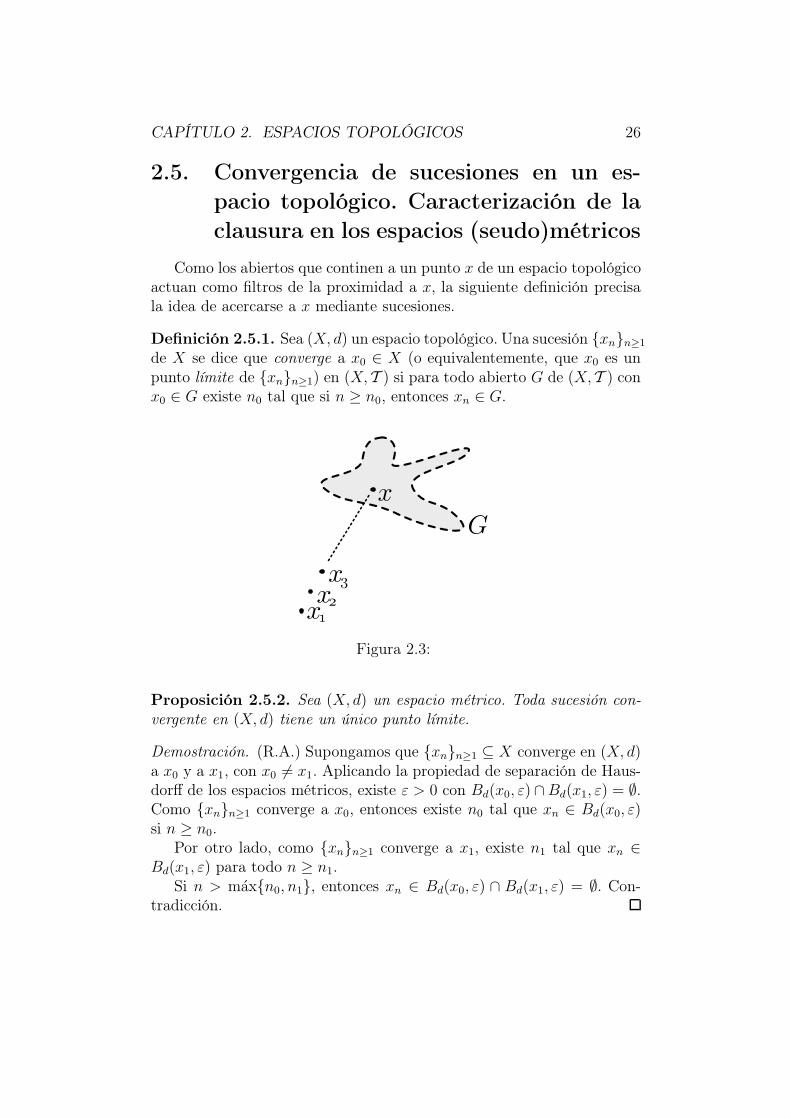
Definición 2.5.1. Sea (X, d) un espacio topológico. Una sucesión {xn}n≥1
de X se dice que converge a x0 ∈ X (o equivalentemente, que x0 es unpunto límite de {xn}n≥1) en (X, T ) si para todo abierto G de (X, T ) conx0 ∈ G existe n0 tal que si n ≥ n0, entonces xn ∈ G.
Figura 2.3:
Proposición 2.5.2. Sea (X, d) un espacio métrico. Toda sucesión con-vergente en (X, d) tiene un único punto límite.
Demostración. (R.A.) Supongamos que {xn}n≥1 ⊆ X converge en (X, d)a x0 y a x1, con x0 6= x1. Aplicando la propiedad de separación de Haus-dorff de los espacios métricos, existe ε > 0 con Bd(x0, ε) ∩Bd(x1, ε) = ∅.Como {xn}n≥1 converge a x0, entonces existe n0 tal que xn ∈ Bd(x0, ε)si n ≥ n0.
Por otro lado, como {xn}n≥1 converge a x1, existe n1 tal que xn ∈Bd(x1, ε) para todo n ≥ n1.
Si n > max{n0, n1}, entonces xn ∈ Bd(x0, ε) ∩ Bd(x1, ε) = ∅. Con-tradicción.
CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 27
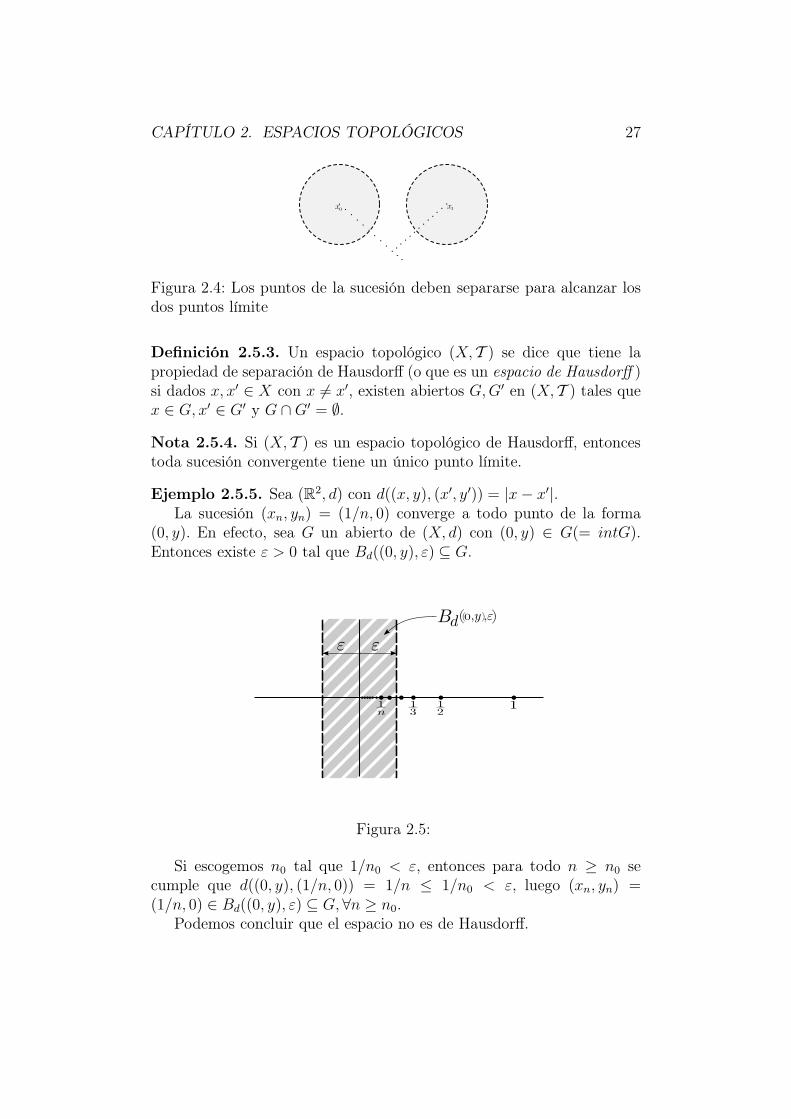
Figura 2.4: Los puntos de la sucesión deben separarse para alcanzar losdos puntos límite
Definición 2.5.3. Un espacio topológico (X, T ) se dice que tiene lapropiedad de separación de Hausdorff (o que es un espacio de Hausdorff )si dados x, x′ ∈ X con x 6= x′, existen abiertos G,G′ en (X, T ) tales quex ∈ G, x′ ∈ G′ y G ∩G′ = ∅.
Nota 2.5.4. Si (X, T ) es un espacio topológico de Hausdorff, entoncestoda sucesión convergente tiene un único punto límite.
Ejemplo 2.5.5. Sea (R2, d) con d((x, y), (x′, y′)) = |x− x′|.La sucesión (xn, yn) = (1/n, 0) converge a todo punto de la forma
(0, y). En efecto, sea G un abierto de (X, d) con (0, y) ∈ G(= intG).Entonces existe ε > 0 tal que Bd((0, y), ε) ⊆ G.
Figura 2.5:
Si escogemos n0 tal que 1/n0 < ε, entonces para todo n ≥ n0 secumple que d((0, y), (1/n, 0)) = 1/n ≤ 1/n0 < ε, luego (xn, yn) =(1/n, 0) ∈ Bd((0, y), ε) ⊆ G, ∀n ≥ n0.
Podemos concluir que el espacio no es de Hausdorff.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 28
Proposición 2.5.6. (Caracterización de la clausura en espacios (seu-do)métricos). Sea (X, d) un espacio (seudo)métrico. Son equivalentes:
1. x ∈ A con x ∈ X y A ⊆ X.
2. Dado ε > 0, existe a ∈ A con d(x, a) < ε.
3. Existe {an}n≥1 ⊆ A con {an}n≥1 convergiendo a x.
Demostración. 1) ⇒ 2): Para cada ε > 0, Bd(x, ε) es abierto en (X, d)y x ∈ Bd(x, ε), luego Bd(x, ε) ∩ A 6= ∅ porque x ∈ A. Existe por tantoa ∈ A tal que a ∈ Bd(x, ε), es decir, d(x, a) < ε.
2) ⇒ 3) : Dado ε = 1, existe a1 ∈ A tal que a1 ∈ Bd(x, 1). Dadoε = 1/2, existe a2 ∈ A tal que a2 ∈ Bd(x, 1/2).
Figura 2.6:
Reiterando el proceso obtenemos una sucesión a1, . . . , an en A conan ∈ B(x, 1/n), es decir, d(x, an) < 1/n. Afirmamos que {an}n≥1 con-verge a x. En efecto, si G es abierto de (X, d) con x ∈ G, entonces existeδ > 0 con Bd(x, δ) ⊆ G.
Si n0 con 1/n0 < δ, se cumple que d(an, x) < 1/n < 1/n0 < δpara todo n ≥ n0. Luego an ∈ Bd(x, δ) ⊆ G y concluimos que {an}n≥1
converge a x.3) ⇒ 1) (Válido para todo espacio topológico):Sea G un abierto de (X, d) con x ∈ G. Como {an}n≥1 converge a x por
hipótesis, existe n0 con an ∈ G si n ≥ n0 (por definición de convergencia).Como an ∈ A, entonces an ∈ A ∩ G 6= ∅ y concluimos que x ∈ A por ladefinición de clausura.
Corolario 2.5.7. En un espacio (seudo)métrico, A es cerrado si y sólosi “para todo x ∈ X para el cual exista {an}n≥1 ⊆ A convergiendo a x setiene que x ∈ A”.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 29
Demostración. Sabemos que A es cerrado si y sólo si A = A. La condición“para todo x ∈ X para el cual exista {an}n≥1 ⊆ A convergiendo a x setiene que x ∈ A” significa, gracias a la proposición anterior, que si x ∈ A,entonces x ∈ A. Por tanto A ⊆ A y, como la otra inclusión siempre escierta, A = A.
2.6. Otros puntos notables. Análisis de la posi-
ción en un espacio topológico
Definición 2.6.1. Sea (X, T ) un espacio topológico. Dado A ⊆ X, deci-mos que x ∈ X es un punto frontera de A si para todo conjunto G abiertode (X, T ) con x ∈ G, se verifica que G ∩ A 6= ∅ y (X − A) ∩G 6= ∅.
Se llama conjunto frontera de A aFrA = {x ∈ X, x punto frontera de A}
Proposición 2.6.2. FrA = A ∩X − A
Proposición 2.6.3. Sea (X, T ) un espacio topológico. Entonces, paratodo A ⊆ X, se cumple:
A = int(A) ∪ FrAAdemás, int(A) ∩ FrA = ∅.
Demostración. Para la contención hacia la derecha, sea x ∈ A, distin-guimos:
-x ∈ int(A), luego x ∈ int(A) ∪ FrA, y hemos terminado.-x 6∈ int(A), entonces, para todo G abierto, con x ∈ G, se tiene que
G * A. De este modo, para todo G abierto con x ∈ G, se verifica queG∩ (X−A) 6= ∅. Entonces, x ∈ FrA, y de este modo, x ∈ int(A)∩FrA.
Para la contención hacia la izquierda, sea x ∈ int(A) ∪ FrA. Distin-guimos:
-x ∈ int(A) ⊆ A ⊆ A, luego x ∈ A.-x ∈ FrA = A ∩X − A, luego x ∈ A.Finalmente, veamos que int(A) y FrA son disjuntos. Por reducción al
absurdo, supongamos que x ∈ int(A) ∩ FrA. En particular, x ∈ int(A),luego, existe un abierto G, con x ∈ G ⊆ A. Entonces, G ∩ (X − A) = ∅,por lo que x 6∈ FrA, que contradice la hipótesis.
Definición 2.6.4. Sea (X, T ) un espacio topológico, y A ⊆ X. Un ele-mento x ∈ X se dice exterior a A si x ∈ int(X −A). Se define el exteriorde A como:
ext(A) = int(X − A)

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 30
Proposición 2.6.5. Sea (X, T ) un espacio topológico, entonces:1. FrA = Fr(X −A)2. X = int(A) ∪ FrA ∪ ext(A)3. Los anteriores conjuntos son disjuntos entre sí.
Demostración. 1. FrA = A ∩X −A = Fr(X −A).2. Tenemos que X = A ∪ (X − A). Como A = X − int(X − A), se
tendrá que X = int(A) ∪ FrA ∪ int(X − A) = int(A) ∪ FrA ∪ ext(A).3. Sabemos que FrA ∩ int(A) = ∅. Por otro lado, FrA ∩ ext(A) =
Fr(X −A)∩ int(X −A) = ∅. Y por último, int(A) ∩ ext(A) = int(A)∩int(X − A) ⊆ A ∩ (X −A) = ∅. Luego los conjuntos son disjuntos.
Ejemplo 2.6.6. (a) Si Z ⊆ R es el conjunto de los números enteros, setiene que int(Z) = ∅ y Z = Z en (R, euclídea), en particular FrZ = Z.Tenemos así que Z es cerrado (pero no abierto) en la recta euclídea.
(b) Si a < b, entonces los intervalos A = [a, b], B = (a, b), C = [a, b)y D = (a, b] como conjuntos de la recta euclídea cumplen:
1. int(A) = int(B) = int(C) = int(D) = (a, b)2. A = B = C = D = [a, b]3. FrA = FrB = FrC = FrD = {a, b}Así pues, A es un conjunto cerrado pero no abierto, B es un conjunto
abierto no cerrado y C y D no son ni abiertos ni cerrados.
(c) El Conjunto de Cantor es el conjunto cerrado de la recta euclídeaC = ∩∞
n=1An obtenido como la intersección de los conjuntos cerrados(y esto prueba que C es un conjunto cerrado) definidos inductivamenteal tomar An+1 como el resultado de eliminar los intervalos abiertos queconstituyen los tercios centrales de los intervalos que componen An. Secomienza con A1 = [0, 1].

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 31
Figura 2.7:
(d) Sea X = {f : [−1, 1] → R continua}, definimos el conjuntoA ⊆ X como A = {f ∈ X : f derivable}. Nos preguntamos si el conjuntoA es cerrado para la distancia del supremo d∞. Esta pregunta, pura-mente topológica, equivale a probar que el límite respecto a d∞ de fun-ciones derivables es derivable lo daría un importante resultado de Análi-sis. Desafortunadamente la respuesta es negativa. En efecto, si tomamosf(x) = |x|, función no derivable, podemos encontrar una sucesión defunciones derivables que tienden a f .
Figura 2.8:
Esto implica que A 6= A, por lo que A no es cerrado. De hecho sepuede demostrar que A = X, por lo que toda función continua es límitede funciones derivables respecto a la distancia del supremo d∞.
Definición 2.6.7. Sea (X, T ) un espacio topológico, A ⊆ X se dicedenso en (X, T ) si A = X.
2.7. Subespacio topológico
Proposición 2.7.1. Sea (X, T ) un espacio topológico, y A ⊆ X. Sea lafamilia de subconjuntos de A,
TA = {A ∩G,G ∈ T }.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 32
Entonces, la familia TA es una topología sobre A, llamada topología rel-ativa a A (o restricción). A (A, TA) se le llama subespacio topológicode (X, T ), y se tiene que C ⊆ A es un cerrado de (A, TA) si y sólo siC = {F ∩A,F cerrado de (X, T )}Demostración. Dejamos como ejercicio comprobar que TA es una topologíasobre A. Para la segunda parte, tenemos que C ⊆ A es un conjunto cerra-do de (A, TA) si y sólo si C = A−H , con H abierto en (A, TA) si y sólo siC = A−H yH = G∩A conG ∈ T . Luego C = A∩(X−H) = A∩(X−G),siendo X −G cerrado de (X, T ).
Teniendo en cuenta que la intersección finita de conjuntos abiertos(de cerrados, respectivamente) es un conjunto abierto (cerrado, resp.),se sigue inmediatamente la siguiente proposición. Dejamos los detallescomo ejercicio.
Proposición 2.7.2. si A abierto de (X, T ), entonces todos los abiertosde (A, TA) son abiertos de (X, T ). Del mismo modo se tendrá para loscerrados.
Ejemplo 2.7.3. En general, los abiertos de (A, TA) no son abiertos de(X, T ). Por ejemplo: sea (R2, euclídea), y A = R2
+ = {(x, y) : y ≥ 0} elsemiplano superior.
Figura 2.9:
Entonces, A no es un abierto en (R2, euclídea). Ahora, tomando G =Bd(0, ε), que es abierto de (R2, euclídea), ocurre que G∩A no es abiertode (R2, euclídea), pero sí lo es de (A, euclídea|A)
Nota 2.7.4. Si B ⊆ A ⊆ X y (X, T ) espacio topológico, denotamos por
BX
a la clausura de B en (X, T ), y BA, a la clausura de B en (A, TA).
Probar que BA
= BX ∩A.
Nota 2.7.5. Sea (X, d) un espacio (seudo)métrico, y sea Td la topologíade los abiertos de (X, d). Dado A ⊆ X, denotamos por d|A a la distan-cia restricción cuyos abiertos forman la topología Td|A, entonces se tiene

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 33
Td|A = (Td)A. Se deja como ejercicio comprobar la igualdad (Ayuda: setiene que para todo a ∈ A, Bd|A(a, ε) = Bd(a, ε) ∩A).
Para terminar, una observación sobre aquellos conjuntos que son si-multáneamente abiertos y cerrados en un espacio topológico. Hemos vistoque al menos X y ∅ son conjuntos simultáneamente abiertos y cerradosen cualquier espacio topológico (X, T ). Los espacios donde únicamenteel espacio total y el conjunto vacío son a la vez abiertos y cerrados son degran importancia en matemáticas y son llamados espacios conexos. Volv-erenos sobre ellos en la Sección 4.4. A continuación demostraremos quetodos los intervalos de la recta con la restricción de la topología euclídeacumplen esta propiedad.
Proposición 2.7.6. Sea J un intervalo de cualquier tipo de la rectaincluyendo la propia recta. Entonces, los únicos abiertos de (J ,euclídea)que son a la vez cerrados son J y ∅.Demostración. R.A. Supongamos por el contrario que existe A ⊂ J abier-to y cerrado de (J ,euclídea) con A 6= ∅ y A 6= J . Escogemos un t0 ∈ J−A.Entonces si
Figura 2.10:
A0 = A ∩ (−∞, t0) = A ∩ (−∞, t0]A1 = A ∩ (t0,∞) = A ∩ [t0,∞)
necesariamente A0 6= ∅ ó A1 6= ∅.Supongamos A0 6= ∅. Como A es abierto en (J, euclídea), también lo esA0 = A∩(J∩(∞, t0)) por ser intersección de dos abiertos en (J, euclídea).Del mismo modo, A0 es cerrado en (J, euclídea).El conjunto A0 está acotado por t0 superiormente y A0 6= ∅, entoncesexiste a = supA0. Como J es in intervalo, para todo t ∈ A0, tenemosa ∈ [t, t0] ⊆ J . Sabemos por el Ejemplo 2.3.7 que a es un punto adherente
de A0 en (R, euclídea). Por la Nota 2.7.4, tenemos que a ∈ A0∩J = A0J.
Ahora bien, como A0 es cerrado en (J, euclídea), entonces, a ∈ A0.En particular, a < t0. Por otro lado, de ser A0 abierto se sigue queexiste δ > 0 con {t ∈ J ; |t − t0| < δ} ⊆ A0, entonces si 0 < ǫ < δ cona + ǫ ∈ [a, t0] ⊆ J tenemos a + ǫ ∈ A0 y a + ǫ > a, por lo que a no essupremo de A0 llegando así a una contradicción.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 34
2.8. Continuidad
Desde el punto de vista del análisis de la posición, una aplicacióncontinua debe preservar la estructura de proximidad; es decir, si un puntoestá adherido a un conjunto, entonces la imagen de aquel debe seguirpegado a la imagen del conjunto.
Figura 2.11:
Definición 2.8.1. Sean (X, T ) e (Y, T ′) espacios topológicos. Una apli-cación f : (X, T ) → (Y, T ′) se dice continua si para todo A ⊆ X, se verifi-ca que f(A) ⊆ f(A). Es decir, si para todo a ∈ A, entonces, f(a) ∈ f(A).
Proposición 2.8.2. (Caracterización de la continuidad por abiertos ycerrados)
Sean (X, T ) e (Y, T ′) espacios topológicos, y sea una aplicación f :(X, T ) → (Y, T ′). Son equivalentes:
(1) f es continua.(2) Si F es un cerrado en (Y, T ′), entonces f−1(F ) es cerrado en
(X, T ).(3) Si G es un abierto en (Y, T ′), entonces f−1(G) es abierto en
(X, T ).
Demostración. (1) ⇒ (2) Sea F un cerrado en (Y, T ′), veamos quef−1(F ) es cerrado en (X, T ). Esto será cierto si f−1(F ) = f−1(F ), demodo que la contención hacia la izquierda se tiene siempre.
Para la otra contención, tomamos A = f−1(F ) ⊆ X. Entonces, por lacontinuidad de f , se tiene que f(f−1(F )) ⊆ f(f−1(F )). Ahora, tenemosque f(f−1(F )) ⊆ F , y por la monotonía de la clausura, f(f−1(F )) ⊆F = F . Aplicando lo anterior, se tiene que f(f−1(F )) ⊆ F . Luego, paratodo z ∈ f−1(F ), se verifica que f(z) ∈ F , luego z ∈ f−1(F ). Por tanto,se tiene la otra inclusión.
(2) ⇒ (3) Sea G abierto, entonces Y − G es cerrado. Como estamossuponiendo (2), f−1(Y −G) = X−f−1(G) es cerrado. Por tanto, f−1(G)es abierto.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 35
(3) ⇒ (1) Sea y ∈ f(A), veamos que y ∈ f(A). Es decir, debemosprobar que para todo G abierto de (Y, T ′) con y ∈ G, se tiene queG∩f(A) 6= ∅. En efecto, si G abierto, entonces, por (3), f−1(G) es abiertode (X, T ). Como y ∈ f(A), existirá algún x ∈ A con f(x) = y. De modoque, como y ∈ G, x ∈ f−1(G). Ahora, como x ∈ A, cualquier abiertoque contenga a x corta a A. Así, por la definición de punto adherente,se tiene que f−1(G) ∩ A 6= ∅. Luego, existe a ∈ A con a ∈ f−1(G).Entonces, f(a) ∈ G∩f(A), es decir, G∩f(A) 6= ∅, que es lo que queríamosprobar.
La caracterización de la continuidad por abiertos y cerrados nos llevaa la siguiente versión general de conocido Teorema del Valor Intermediode Bolzano.
Proposición 2.8.3. Sea (X, T ) un espacio topológico. Son equivalentesa) Los únicos conjuntos abiertos que son también cerrados en (X, T ) sonX y ∅.b) Si f : (X, T ) → (R, euclídea) es continua y a, b ∈ f(X) con a ≤ bentonces [a, b] ⊆ f(X)c)(Teorema de Bolzano) Si f : (X, T ) → (R, euclídea) es continua y∃x1, x2 ∈ X con f(x1) < 0 y f(x2) > 0, entonces ∃x0 ∈ X con f(x0) = 0.
Demostración. a)⇒ b)Si a = b no hay nada que probar. Supongamos entonces que a < b. Sialgún t con a < t < b cumpliese que t /∈ f(X), entonces el conjuntoA = f−1((t,∞)) coincide con f−1([t,∞)). Luego la continuidad de f im-plica que el A es un conjunto a la vez abierto y cerrado. Además, comoa ∈ f(X), si a = f(x0), x0 /∈ A pues a = f(x0) < t, mientras que sif(x1) = b entonces x1 ∈ A pues b > t. Esto nos dice que A 6= ∅, X, loque contardice a).
b)⇒ c)Si f(x1) = a < 0 y f(x2) = b > 0. Tenemos a ≤ b, entonces [a, b] ⊆ f(X).Por b) sabemos que 0 ∈ [a, b] ⊆ f(X). Luego, ∃x0 ∈ X con f(x0) = 0
c)⇒ a)Si no no se cumpliese a) entonces existe A 6= ∅, X abierto y cerrado a lavez. Sea f : (X, T ) → (R, euclídea) definida como
f(x) =
{+1 si x ∈ A−1 si x 6∈ A

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 36
Afirmamos que f es continua y claramente no cumple la condición c),llegando a una contradicción. Veamos la continuidad. Sea G abierto de(R,euclídea)
Supongamos 1,−1 ∈ G ⇒ f−1(G) = A ∪ (X − A) = XSupongamos 1,−1 6∈ G ⇒ f−1(G) = ∅Supongamos 1 ∈ G y −1 6∈ G ⇒ f−1(G) = ASupongamos −1 ∈ G y 1 6∈ G ⇒ f−1(G) = X − A
En cualquier caso f−1(G) es un conjunto abierto y por tanto f es con-tinua.
Consecuencia: Como todo intervalo de la recta (incluyendo la recta)cumple el apartado a) (Proposición 2.7.6), obtenemos como caso partic-ular de la Proposición 2.8.3 la versión clásica del teorema de Bolzano.
Proposición 2.8.4. (Caracterización de la continuidad para espacios(seudo)métricos)
Sea f : (X, d) → (Y, d′) una aplicación entre espacios (seudo)métricos.Son equivalentes:
(1) f es continua (con la caracterización por abiertos).(2) Para todo x ∈ X y para todo ε > 0, existe δ > 0 tal que si
d(x, x′) < δ, entonces, d′(f(x), f(x′)) < ε. O equivalentemente, f(Bd(x, δ)) ⊆Bd′(f(x), ε).
Demostración. (1) ⇒ (2) Como Bd′(f(x), ε) es abierto de (Y, T ′), por (1)sabemos que f−1(Bd′(f(x), ε)) es abierto con de (X, T ). De este modo,si f(x) ∈ Bd′(f(x), ε), entonces x ∈ f−1(Bd′(f(x), ε)). Así, por definiciónde abierto, f−1(Bd′(f(x), ε)) es entorno de x, luego existirá δ > 0 tal queBd(x, δ) ⊆ f−1(Bd′(f(x), ε)). Y por tanto, f(Bd(x, δ)) ⊆ Bd′(f(x), ε).
(2) ⇒ (1) Si G es abierto de (Y, d′), debemos probar que f−1(G) esabierto de (X, d). Es decir, hay que probar que f−1(G) es entorno de todossus puntos. En efecto, sea x ∈ f−1(G), entonces, como G abierto, existeε > 0 con Bd′(f(x), ε) ⊆ G. Por (2), existirá δ > 0 tal que f(Bd(x, δ)) ⊆Bd′(f(x), ε) ⊆ G. Luego, Bd(x, δ) ⊆ f−1(G), es decir, f−1(G) es entornode todos sus puntos.
Proposición 2.8.5. (Caracterización por convergencia)Sea f : (X, d) → (Y, d′) una aplicación entre espacios (seudo)métricos.
Son equivalentes:(1) f es continua.(2) Si {xn}n≥1 ⊆ X y {xn}n≥1 converge a x0 en (X, d), entonces
{f(xn)}n≥1 converge a f(x0) en (Y, d′).

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 37
Demostración. (1) ⇒ (2) Debemos probar que para cualquier G abiertode (Y, d′) con f(x0) ∈ G, existe un n0 tal que f(xn) ∈ G ∀n ≥ n0.En efecto, por (1) sabemos que f−1(G) es abierto de (X, d). Además, sif(x0) ∈ G, entonces x0 ∈ f−1(G). Por hipótesis, si {xn}n≥1 converge ax0, entonces existe n0 con xn ∈ f−1(G); es decir, f(xn) ∈ G para todon ≥ n0.
(2) ⇒ (1) Para ver que f es continua, debemos probar que f(A) ⊆f(A), para todo A ⊆ X. En efecto, sea y ∈ f(A), entonces existe x ∈A tal que y = f(x). Por la caracterización de la clausura en espacios(seudo)métricos, va a existir {an}n≥1 ⊆ A convergiendo a x. Entonces,por (2), {f(an)}n≥1 ⊆ f(A) converge a f(x). Luego, por propiedad de la
clausura, y = f(x) ∈ f(A). Por lo que hemos probado lo que queríamos.
Proposición 2.8.6. (Propiedades generales de las aplicaciones contin-uas)
a) Cualquier aplicación constante es continua.b) La identidad id : (X, T ) → (X, T ) es continua.c) La composición de aplicaciones continuas es continua.d) La restricción de una aplicación continua es continua respecto de
la topología restricción (o relativa).Notar que b) + d) implica que toda inclusión i : (A, TA) → (X, T ) :
i(a) = a ∀a ∈ A, con A ⊆ X, es continua.
Demostración. Usaremos la caracterización por abiertos.a) Sea f : (X, T ) → (Y, T ′) constante. Es decir, f(x) = y0 ∈ Y ∀x ∈
X. Entonces, sea U ⊆ Y abierto en (Y, T ′), tendremos que f−1(U) = ∅si y0 6∈ U , que es un abierto; y f−1(U) = X si y0 ∈ U , que también esabierto. Luego f es continua.
b) Sea U abierto de (X, T ), entonces id−1(U) = U . Luego la identidades continua.
c) Sean f : (X, T ) → (Y, T ′) y g : (Y, T ′) → (Z, T ′′) aplicacionescontinuas, y sea U abierto de (Z, T ′′). Entonces, x ∈ (g ◦ f)−1(U) ⇔g(f(x)) = g ◦ f(x) ∈ U ⇔ f(x) ∈ g−1(U) ⇔ x ∈ f−1(g−1(U)) Es decir,(g ◦ f)−1(U) = f−1(g−1(U)), que es abierto por ser f continua, y serg−1(U) abierto por la continuidad de g. Por tanto, la composición deaplicaciones continuas es continua.
d) Sea f : (X, T ) → (Y, T ′) continua, y A ⊆ X. Entonces, sea f |A :(A, TA) → (Y, T ′) la restricción dada por f |A(a) = f(a) ∀a ∈ A. Ahora,sea U ⊆ Y abierto de (Y, T ′), sabemos que f−1(U) es abierto, y, por

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 38
tanto, (f |A)−1(U) = A ∩ f−1(U), abierto para la topología restricción.Luego, la restricción es continua.
Proposición 2.8.7. Sea f : (X, T ) → (Y, T ′) continua, y f : (X, T ) →(f(X), T ′|f(X)) la restricción sobre la imagen, dada por f(x) = f(x)
∀x ∈ X. Entonces f es continua.
Demostración. Sea U abierto de (f(X), T ′|f(X)). Por definición se tieneque U = W ∩ f(X), con W un abierto de (Y, T ′). De este modo, setiene que f−1(U) = f−1(W ) es abierto de (X, T ), pues f es continua yf−1(f(X)) = X.
Ejemplo 2.8.8. 1. Sea id : (X, T ) → (X, T ). No siempre la aplicaciónidentidad id : (X, T ) → (X, T ′) va a ser continua si T 6= T ′. Por ejemplo,vamos a tomar las topologías T asociada a la distancia euclídea, T ′ a ladistancia discreta, y tomamos X = R. Entonces, sabemos que la sucesión{xn}n≥1 = { 1
n}n≥1 converge a 0 en la topología euclídea. Sin embargo, se
tiene que id(xn) = xn no converge a id(0) = 0, pues Bdiscreta(0, ε) = {0}para ε ≤ 1, y xn 6∈ {0} ∀n ≥ 1
2. Ahora, sea id : (R2, euclídea) → (R2, taxi). En este caso, id va a sercontinua, a pesar de tener distintas distancias definiendo las topologías delos espacios de salida y llegada. Análogo se tendrá que id : (R2, taxi) →(R2, euclídea) es continua.
Definición 2.8.9. Una aplicación f : (X, T ) → (Y, T ′) se dice equivalen-cia topológica (homeomorfismo) si f es biyectiva, y f y f−1 son continuas.
Ejemplo 2.8.10. Se tiene que id : (R, discreta) → (R, euclídea) escontinua (se prueba que las únicas sucesiones convergentes son las con-stantes), pero vimos que id−1 : (R, euclídea) → (R, discreta) no lo es. Portanto, en este caso, la identidad no es una equivalencia topológica.
Proposición 2.8.11. Las proyecciones pi : (Rn, euclídea) → (R, euclídea),definidas como pi(x1, ..., xn) = xi, para 1 ≤ i ≤ n son siempre continuas.
Demostración. Aplicaremos el criterio ε−δ. Dado (x1, ..., xn) ∈ Rn y ε >0, debemos probar que si de((x1, ..., xn), (x′1, ..., x
′n)) =
√∑ni=1(xi − x′i) <
δ, entonces |xi − x′i| < ε.En efecto, basta tomar δ = ε, de manera que
√∑ni=1(xi − x′i) < ε,
deduciendo que |xi − x′i|2 < ε2, luego |xi − x′i| < ε.

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 39
Proposición 2.8.12. Una aplicación f : (X, T ) → (Rn, euclídea) escontinua si y sólo si pi ◦ f : f : (X, T ) → (R, euclídea) es continua paratodo 1 ≤ i ≤ n.
Demostración. Para probar la implicación hacia la derecha basta ob-servar que como f y pi son continuas, la composición de aplicacionescontinuas es continua. Luego, pi ◦ f es continua para todo 1 ≤ i ≤ n.
Para la otra implicación, suponemos que cada pi ◦ f es continua.Entonces, sea U ⊆ Rn abierto de (Rn,euclídea), para ver que f es con-tinua, debemos probar que f−1(U) es abierto de (X, T ). Es decir, hayque probar que f−1(U) es entorno de todos sus puntos. En efecto, seax ∈ f−1(U), entonces f(x) ∈ U . Así, al ser U abierto euclídeo, vaa existir ε tal que, tomando, por ejemplo, la distancia del máximo,Bd(f(x), ε) ⊆ U . Entonces, si f(x1, ..., xn) = (y1, ..., yn), se tendrá queBd(f(x), ε) = {(z1, ..., zn) ∈ Rn : max{|yi − zi|} < ε} ⇔ |yi − zi| < ε∀i⇔ zi ∈ (yi − ε, yi + ε) que es un abierto euclídeo en R.
Por tanto, como pi ◦f es continua, entonces (pi ◦f)−1(yi−ε, yi +ε) esabierto de (X, T ). Y además, (pi◦f)−1(yi−ε, yi+ε) = f−1(p−1
i (yi−ε, yi+ε)) = f−1(R×R× ...×(yi −ε, yi +ε)
(i)× ...×R). De este modo, se tendráque x ∈ ⋂n
i=1Ai = f−1(∏n
i=1(yi−ε, yi+ε)) = f−1(Bd(f(x), ε)) ⊆ f−1(U),luego f−1(U) es entorno de todos sus puntos.
Proposición 2.8.13. Si f : (X, T ) → (Y, T ′) es un homeomorfismo yG ⊆ X es un abierto de (X, T ), entonces f(G) es abierto de (Y, T ′). Setendrá un resultado análogo para los cerrados.
Demostración. Al ser f un homeomorfismo, entonces f−1 : (Y, T ′) →(X, T ) es continua. Luego (f−1)−1(G) = f(G) es abierto de (Y, T ′).
Definición 2.8.14. Una aplicación f : (X, T ) → (Y, T ′) se dice abiertasi para todo abierto G de (X, T ), entonces f(G) es abierto de (Y, T ′).Análogamente, se dice que f es cerrada si para todo cerrado F de (X, T ),entonces f(F ) es cerrado de (Y, T ′).
Proposición 2.8.15. f es homeomorfismo si y sólo si es biyectiva, con-tinua y abierta, si y sólo si es biyectiva, continua y cerrada.
Demostración. Veamos la primera equivalencia. La implicación hacia laderecha se tiene por ser todo homeomorfismo una aplicación abierta.Recíprocamente, basta probar que f−1 es continua. En efecto, si G es
CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 40
abierto de (X, T ), entonces (f−1)−1(G) = f(G) va a ser abierto porhipótesis. Luego f−1 es continua, y, por tanto, f es un homeomorfismo.
La segunda equivalencia se hace de modo análogo.
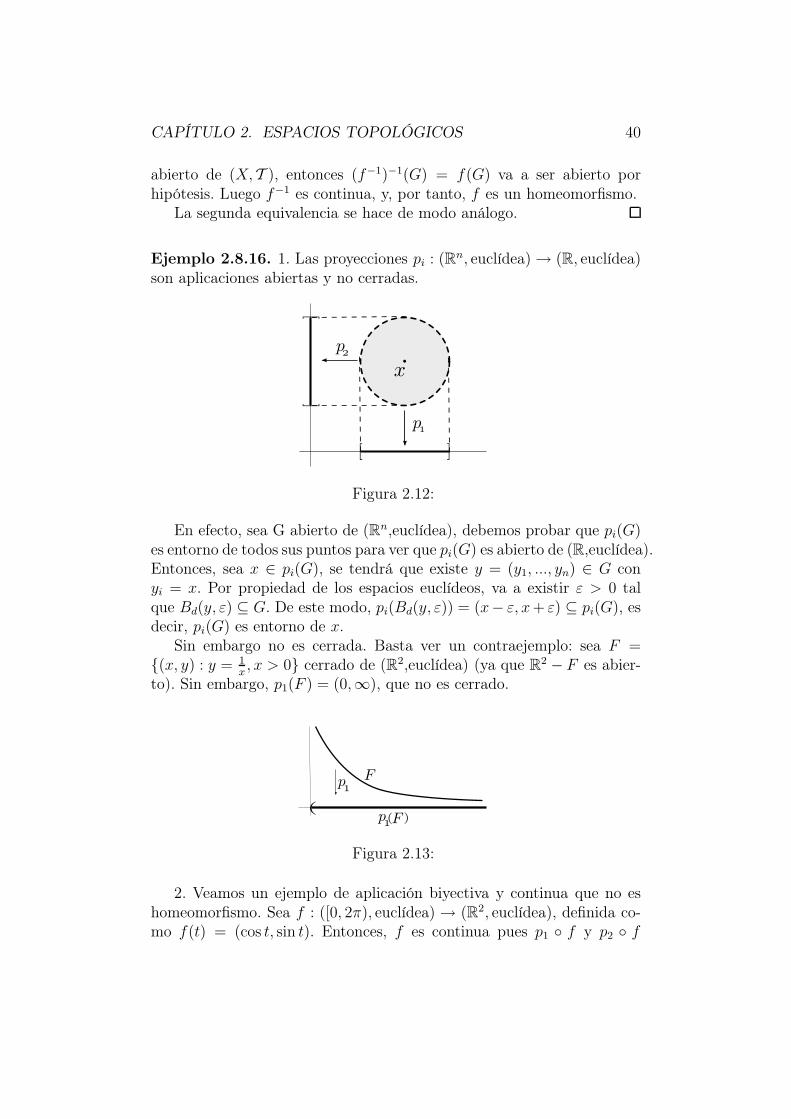
Ejemplo 2.8.16. 1. Las proyecciones pi : (Rn, euclídea) → (R, euclídea)son aplicaciones abiertas y no cerradas.
Figura 2.12:
En efecto, sea G abierto de (Rn,euclídea), debemos probar que pi(G)es entorno de todos sus puntos para ver que pi(G) es abierto de (R,euclídea).Entonces, sea x ∈ pi(G), se tendrá que existe y = (y1, ..., yn) ∈ G conyi = x. Por propiedad de los espacios euclídeos, va a existir ε > 0 talque Bd(y, ε) ⊆ G. De este modo, pi(Bd(y, ε)) = (x− ε, x+ ε) ⊆ pi(G), esdecir, pi(G) es entorno de x.
Sin embargo no es cerrada. Basta ver un contraejemplo: sea F ={(x, y) : y = 1
x, x > 0} cerrado de (R2,euclídea) (ya que R2 − F es abier-
to). Sin embargo, p1(F ) = (0,∞), que no es cerrado.
Figura 2.13:
2. Veamos un ejemplo de aplicación biyectiva y continua que no eshomeomorfismo. Sea f : ([0, 2π), euclídea) → (R2, euclídea), definida co-mo f(t) = (cos t, sin t). Entonces, f es continua pues p1 ◦ f y p2 ◦ f

CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 41
son las aplicaciones cos t y sin t, respectivamente, que son continuas.Así que, como f([0, 2π)) es la circunferencia unidad S1, vamos a definir
f : ([0, 2π), euclídea) → (S1, euclídea) la restricción de f .
Entonces, f es continua pues f lo es. Además, f es biyectiva. Sinembargo, f−1 no es continua, ya que tomando la sucesión (xn, yn) =
(cos(2π− 1n), sin(2π− 1
n)), ésta va a converger a (1, 0) ∈ S1, pero f−1(xn, yn) =
2π − 1n
no converge en [0, 2π) por hacerlo a 2π 6∈ [0, 2π).
3. Sean (a, b) y (a′, b′) intervalos de R. Definimos la aplicación f :((a, b), euclídea) → ((a′, b′), euclídea) como f(x) = y = b′−a′
b−a(x− a) + a′.
Figura 2.14:
Entonces, esta aplicación es continua, biyectiva y su inversa, f−1(y) =b−ab′−a′
(y − a′) + a, también es continua. Luego, f es un homeomorfismo.Por tanto, todos los intervalos acotados de (R,euclídea) son homeomor-fos. De modo análogo, los intervalos de la forma (a,∞) y (a′,∞) van aser homeomorfos. Así como los de la forma [a, b] y [a′, b′], y (−∞, b) y(−∞, b′). Igualmente lo son (a,∞) y (−∞, b).
5. Se tiene que ((−π2, π
2),euclídea) y (R,euclídea) son homeomorfos.
Basta tomar f(x) = tan x, por tratarse de una aplicación continua ybiyectiva, y ser f−1(y) = arctan y continua.
Figura 2.15:
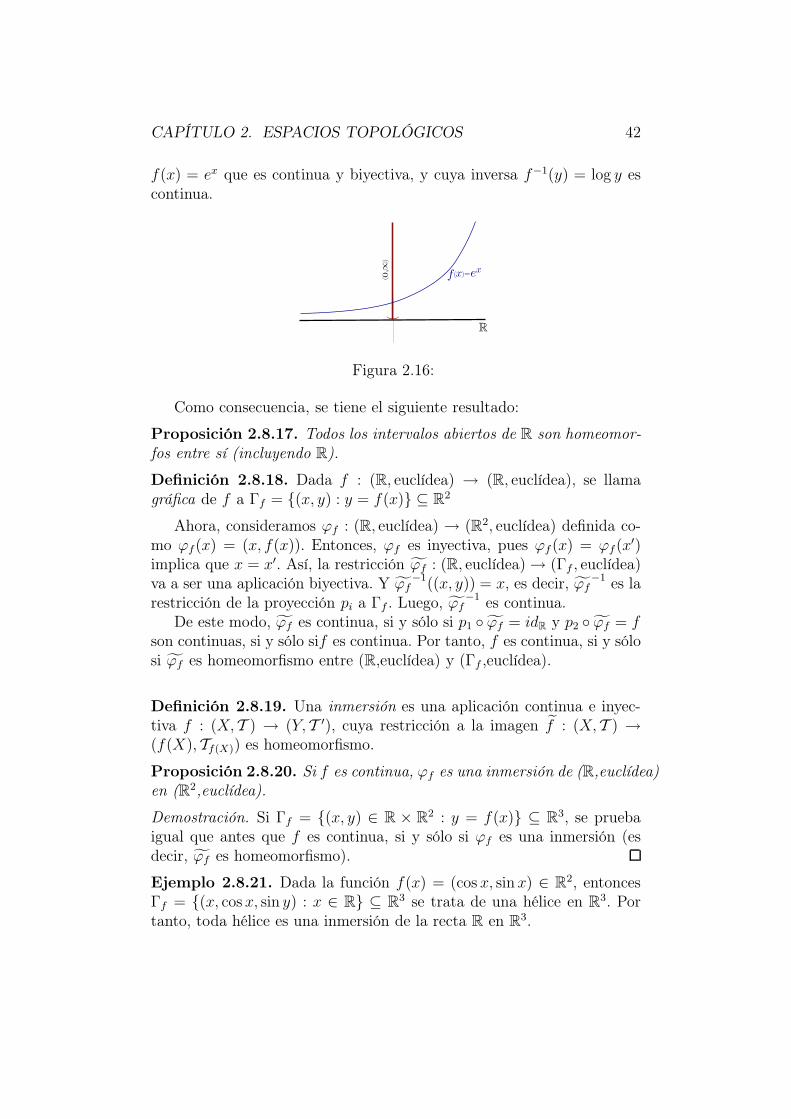
6. También se tiene que ((0,∞),euclídea) y (R,euclídea) son homeo-morfos. En este caso, basta tomar f : (R, euclídea) → ((0,∞), euclídea) :
CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 42
f(x) = ex que es continua y biyectiva, y cuya inversa f−1(y) = log y escontinua.
Figura 2.16:
Como consecuencia, se tiene el siguiente resultado:
Proposición 2.8.17. Todos los intervalos abiertos de R son homeomor-fos entre sí (incluyendo R).
Definición 2.8.18. Dada f : (R, euclídea) → (R, euclídea), se llamagráfica de f a Γf = {(x, y) : y = f(x)} ⊆ R2
Ahora, consideramos ϕf : (R, euclídea) → (R2, euclídea) definida co-mo ϕf(x) = (x, f(x)). Entonces, ϕf es inyectiva, pues ϕf (x) = ϕf(x
′)implica que x = x′. Así, la restricción ϕf : (R, euclídea) → (Γf , euclídea)va a ser una aplicación biyectiva. Y ϕf
−1((x, y)) = x, es decir, ϕf−1 es la
restricción de la proyección pi a Γf . Luego, ϕf−1 es continua.
De este modo, ϕf es continua, si y sólo si p1 ◦ ϕf = idR y p2 ◦ ϕf = fson continuas, si y sólo sif es continua. Por tanto, f es continua, si y sólosi ϕf es homeomorfismo entre (R,euclídea) y (Γf ,euclídea).
Definición 2.8.19. Una inmersión es una aplicación continua e inyec-tiva f : (X, T ) → (Y, T ′), cuya restricción a la imagen f : (X, T ) →(f(X), Tf(X)) es homeomorfismo.
Proposición 2.8.20. Si f es continua, ϕf es una inmersión de (R,euclídea)en (R2,euclídea).
Demostración. Si Γf = {(x, y) ∈ R × R2 : y = f(x)} ⊆ R3, se pruebaigual que antes que f es continua, si y sólo si ϕf es una inmersión (esdecir, ϕf es homeomorfismo).
Ejemplo 2.8.21. Dada la función f(x) = (cos x, sin x) ∈ R2, entoncesΓf = {(x, cosx, sin y) : x ∈ R} ⊆ R3 se trata de una hélice en R3. Portanto, toda hélice es una inmersión de la recta R en R3.
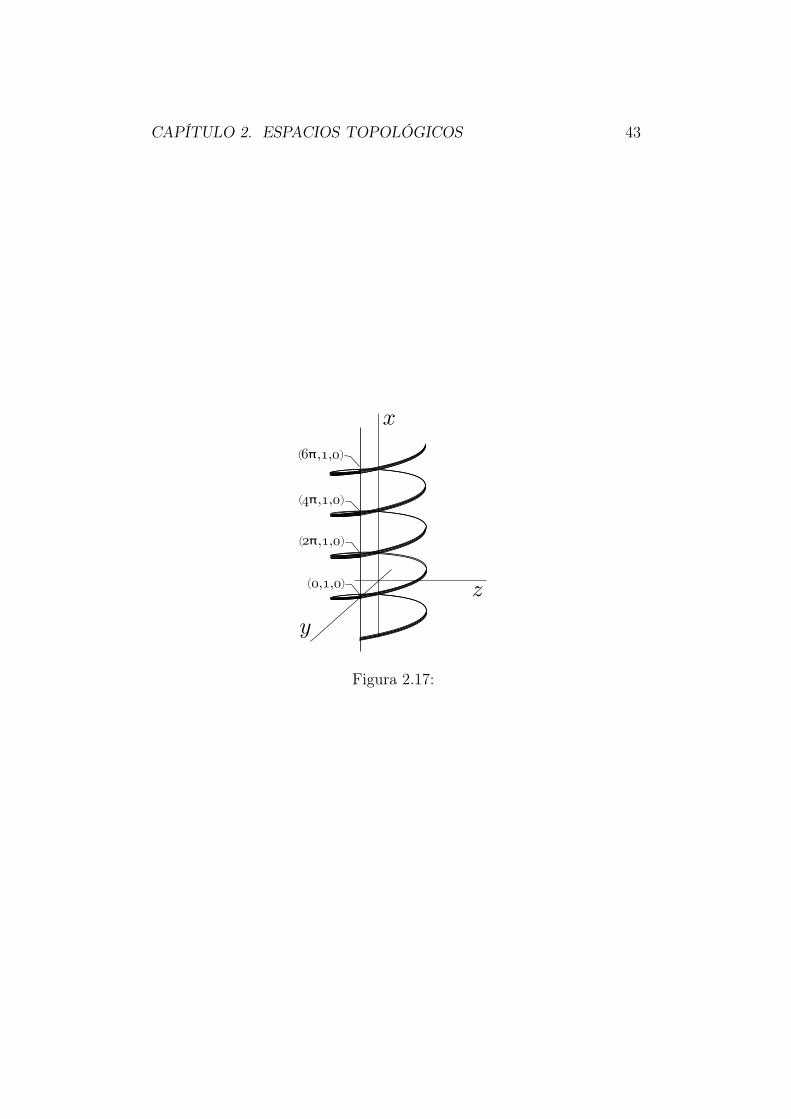
CAPÍTULO 2. ESPACIOS TOPOLÓGICOS 43
Figura 2.17:
Capítulo 3
Compacidad
3.1. Definición y primeros ejemplos
Definición 3.1.1. Dado un conjunto X y A ⊆ X, un recubrimiento de Aen X es una familia {Cα}α∈Λ de subconjuntos de X tal que A ⊆ ⋃
α∈Λ Cα.
Nota 3.1.2. Si A = X la inclusión es una igualdad: X =⋃
α∈Λ Cα.
Definición 3.1.3. Un subrecubrimiento de {Cα}α∈Λ es una subfamilia{Cα′}α′∈Λ′ con Λ′ ⊆ Λ y aún A ⊆ ⋃
α′∈Λ′ Cα′
Definición 3.1.4. Sea (X, T ) un espacio topológico. Un subconjuntoA ⊆ X se dice compacto en (X, T ) si de todo recubrimiento de A porabiertos en (X, T ) se puede extraer un subrecubrimiento finito.
Nota 3.1.5. Si A = X decimos que (X, T ) es un espacio compacto.
Lema 3.1.6. A ⊆ es compacto en (X, T ) si y solo si el subespacio (A, TA)es compacto.
44

CAPÍTULO 3. COMPACIDAD 45
Demostración. [⇒] Supongamos A compacto en (X, T ).Sea {Gα}α∈Λ un recubrimiento de A por abiertos de la topología restric-ción TA, entonces A =
⋃α∈ΛGα y para cada α ∈ Λ se tiene Gα = Hα ∩A
con Hα abierto ed (X, T ).Ahora, A =
⋃α∈ΛGα ⊆ ⋃
α∈ΛHα. Por tanto, {Hα}α∈Λ es recubrimientode A por abiertos de (X, T ). Luego, utilizando la hipótesis,∃ α1, . . . , αn ∈ Λ con Aα ⊆ Hα1
∪ · · · ∪Hαn, lo que implica que
A = (Hα1∪· · ·∪Hαn
)∩A = (Hα1∩A)∪· · ·∪(Hαn
∩A) = Gα1∪· · ·∪Gαn
,por lo tanto tenemos que (A, TA) es compacto.[⇐] Recíproco: (A, TA) es compacto. ¿A es compacto de (X, T )?Sea {Uα}α∈Λ recubrimiento de A por abiertos de T , A ⊆ ⋃
α∈Λ Uα.Entonces:A = (
⋃α∈Λ Uα)∩A =
⋃α∈Λ(Uα∩A) donde las intersecciones son abiertos
de (A, TA). Aplicando la hipótesis, ∃α1 . . . αn con A = (Uα1∩ A) ∪ · · · ∪
(Uαn∩ A) ⊆ Uα1
∪ · · · ∪ Uαn.
Por lo tanto, A es compacto en (X, T ).
Ejemplo 3.1.7. (Rn, euclídea) no es compacto.Tenemos: Rn =
⋃n≥1Bd(θ, n), con d= distancia euclídea y θ= origen.
Pero, no existe n1, . . . nk con Rn =⋃k
j=1Bd(θ, nj), pues en tal caso,Rn =Bd(θ, n0), con n0 = max{n1, . . . nk}
Ejemplo 3.1.8. (X, discreta) es compacto ⇔ X es finito.
Ejemplo 3.1.9. En cualquier espacio topológico (X, T ) todo conjun-to finito es siempre compacto. En efecto, sea el conjunto finito A ={a1, . . . , as} y A ⊆ ⋃
α∈ΛGα, con Gα abierto de (X, T ). Para cadaai encontramos un Gαi
con a1 ∈ Gαi(1 ≤ i ≤ s). Entonces, A ⊆
Gα1∪ · · · ∪Gαs
; por tanto, A es compacto.
Ejemplo 3.1.10. (R, cofinita) es compacto. Recordemos que la topologíacofinita es la familia {∅, A ⊆ R tal que R − A sea finito }. Sea R =∪α∈ΛGα con Gα abierto de la topología cofinita. Dado x ∈ R, ∃α0 conx ∈ Gα0
, lo que implica que Gα06= ∅. Luego, R − Gα0
= {x1, . . . xn} esfinito. Ahora, como en el Ejemplo 3.1.9, dado xi, sea Gαi
con xi ∈ Gαi.
Entonces tenemos que:
R = (R −Gα0) ∪Gα0
= {x1, . . . , xn} ∪Gα0⊆ Gα1
∪ · · · ∪Gαn∪Gα0
.
Hemos probado que (R, cofinita) es compacto.
Ejemplo 3.1.11. Toda unión finita de compactos es compacto.

CAPÍTULO 3. COMPACIDAD 46
Ejemplo 3.1.12. En (R, euclídea) todo intervalo cerrado y acotado [a, b]es compacto.En efecto, sea {Gα}α∈Λ recubrimiento de [a, b] por abiertos de (R, eu-clídea).Sea A = {x ∈ [a, b]; el intervalo [a, x] está recubierto por una cantidad finita de Gα}.Tenemos que A 6= ∅ pues si tomamos x = a, tenemos que [a, a] = {a} ya está en algún Gα0
pues [a, b] ⊆ ∪α∈ΛGα.Sea x0 = supA. Afirmamos:
1. x0 ∈ A
2. x0 = b, y con esto se habría demostrado el ejemplo.
Veamos (1):x0 ∈ [a, b] ⊆ ∪α∈ΛGα, luego ∃α′ con x0 ∈ Gα′ , y como Gα′ es abierto,existe ε > 0 con (x0 − ε, x0 + ε) ⊆ Gα′ . Como x0 es supremo, ∃x1 ∈ Acon x1 ∈ (x0 − ε, x0]. Como x1 ∈ A, entonces ∃α1, . . . , αn con [a, x1] ⊆Gα1
∪ · · · ∪Gαn. Lo que implica que
[a, x0] ⊆ [a, x1] ∪ (x0 − ε, x0] ⊆ Gα1∪ · · · ∪Gαn
∪Gα′.
Por tanto, aplicando la definición de A, tenemos que x0 ∈ A.Veamos (2):R.A.: Supongamos que x0 < b, entonces ∃δ > 0 tal que [x0, x0+δ) ⊆ [a, b].Sea ε0 = min{δ, ε}, donde ε está dado más arriba. Entonces, [x0, x0 +ε0) ⊆ Gα′ , luego,
[a, x0 +
ε0
2
]⊆ [a, x0] ∪ [x0, x0 + ε0) ⊆ Gα′ ∪Gα1
∪ · · · ∪Gαn,
y por definición de A, tenemos que x0 +ε0
2∈ A. Contradicción, porque
x0 +ε0
2> x0.
Luego, x0 = b. Por tanto, [a, b] es compacto.
Proposición 3.1.13. Sea (X, d) espacio (seudo)métrico. Entonces, todoC ⊆ X compacto está acotado.
Demostración. Sea x0 ∈ C cualquiera. Tenemos queX =⋃∞
n=1Bd(x0, n),luego C ⊆ ⋃∞
n=1Bd(x0, n). Como C es compacto, ∃n1, . . . , nk con C ⊆Bd(x0, n1)∪ · · ·∪Bd(x0, nk) ⊆ Bd(x0, n0) con n0 = max{n1, . . . , nk}. Portanto, ∀x, x′ ∈ C, tenemos que d(x, x′) ≤ d(x, x0) + d(x′, x0) < 2n0; estoes, C está acotado.

CAPÍTULO 3. COMPACIDAD 47
3.2. La compacidad y los conjuntos cerrados
Definición 3.2.1. Una familia de conjuntos {Aα}α∈Λ se dice que tienela Propiedad de Intersección Finita (PIF) si toda subfamilia finitaAα1
, . . . , Aαntiene intersección Aα1
∩ · · · ∩Aαn6= ∅ no vacía.
Proposición 3.2.2. Sea (X, T ) un espacio topológico. Son equivalentes:
1. (X, T ) es compacto.
2. Tada familia de cerrados con la PIF tiene intersección distinta devacío.
Demostración. Veamos 1) ⇒ 2).R.A.: Sea {Fα}α∈Λ una familia de cerrados con la PIF y tal que ∩Fα = ∅.EntoncesX = ∪α∈Λ(X − Fα), es un recubrimiento abierto de X y aplicando 1),∃α1, . . . , αn conX = (X − Fα1
) ∪ · · · ∪ (X − Fαn). Tomando complementarios,
∅ = Fα1∩ · · · ∩ Fαn
, que es una contradicción con la PIF.Veamos 2) ⇒ 1).Sea {Gα}α∈Λ un recubrimiento por abiertos de X. Es decir, X = ∪α∈ΛGα
y cada Gα es abierto. Tomando complementarios, ∅ = ∩α∈Λ(X − Gα).Aplicando 2), la familia {X − Gα}α∈Λ no puede tener la PIF, y pordefinición: ∃α1, . . . , αn con (X − Gα1
) ∩ · · · ∩ (X − Gα1) = ∅. Luego,
X = Gα1∪Gα2
∪ · · · ∪Gαn. Lo que prueba que (X, T ) es compacto.
Proposición 3.2.3. (Los cerrados heredan la compacidad).Sea (X, T ) un espacio topológico compacto y F ⊆ X cerrado en él. En-tonces F es compacto en (X, T ).
Demostración. Sea {Gα}α∈Λ recubrimiento de F con abiertos de (X, T ).Entonces X = (X − F ) ∪ F ⊆ (X − F ) ∪ (∪α∈ΛGα), y por tanto, X =(X − F ) ∪ (∪α∈ΛGα). Así, {(X − F ), Gα}α∈Λ es un recubrimiento porabiertos de X. Aplicando la hipótesis, ∃α1, . . . , αn conX = (X−F )∪ (Gα1
∪· · ·∪Gαn). Como F ∩ (X−F ) = ∅, necesariamente
F ⊆ Gα1∪ · · · ∪Gαn
. Lo que demuestra F es compacto.
Puesto que todo conjunto acotado está contenido en un intervalo cer-rado, se sigue de 3.2.3 y 3.1.12.
Corolario 3.2.4. En (R, euclídea), si A es cerrado y acotado entonceses compacto.

CAPÍTULO 3. COMPACIDAD 48
3.3. Compacidad y propiedad de Haussdorff
Proposición 3.3.1. (Separación de punto y compacto)Sea (X, T ) un espacio topológico con la propiedad de Haussdorff. SeaF ⊆ X compacto y x 6∈ F. Entonces existen abiertos U y V de (X, T )con x ∈ U, F ⊆ V y U ∩ V = ∅.
Nota 3.3.2. La proposición anterior vale para cualquier espacio métrico.
Demostración. Dado y ∈ F, como x 6∈ F entonces x 6= y, y por lapropiedad de Hausdorff existen abiertos Vy y Uy con x ∈ Uy, y ∈ Vy y Vy∩Uy = ∅.Ahora, F =
⋃y∈F{y} ⊆ ⋃
y∈F Vy y como F es compacto ∃ y1 . . . yn conF ⊆ Vy1
∪ · · · ∪ Vyn. Sea V =
⋃ni=1 Vyi
y U =⋂n
i=1Uyi. Obsérvese que V
es abierto y U también (por ser intersección finita de abiertos).Además, F ⊆ V y x ∈ U.Por último, U ∩V = U ∩ (Vy1
∪ · · · ∪ Vyn) = (U ∩ Vy1
)∪ · · · ∪ (U ∩Vyn) ⊆
⊆ (Uy1∩ Vy1
) ∪ (Uy2∩ Vy2
) ∪ · · · ∪ (Uyn∪ Vyn
), como cada una de estasúltimas intersecciones es vacía, se tiene que U ∩ V = ∅.Corolario 3.3.3. Todo compacto en un espacio con la propiedad de sep-aración de Hausdorff (en particular en un espacio métrico) es siemprecerrado.
Demostración. El conjunto compacto F será cerrado si y solo si X − Fes abierto. Sea x ∈ X − F veamos si x ∈ int(X − F ) :Como x 6∈ F por la proposición anterior ∃ U, V abiertos con x ∈ U, F ⊆ Vy U ∩ V = ∅.En particular, F ∩ U ⊆ V ∩ U = ∅ entonces U ∩ F = ∅, y por tantox ∈ U ⊆ X − F, que, al ser U abierto, implica que x ∈ int(X − F ): Asípues, X − F es abierto y F es cerrado.
Proposición 3.3.4. (Separación de compactos)Sea (X, T ) un espacio topológico con la propiedad de separación de Haus-dorff. Sean F1, F2 ⊆ X compactos disjuntos. Entonces existen abiertos Uy V de (X, T ) con F1 ⊆ U, F2 ⊆ V y U ∩ V = ∅.Demostración. Si x ∈ F1, entonces, como F1∩F2 = ∅, x 6∈ F2. Aplicandola proposición anterior: ∃ abiertos Ux y Vx con Ux ∩ Vx = ∅ tales quex ∈ Ux y F2 ⊆ Vx.Tenemos F1 =
⋃x∈F1
{x} ⊆ ⋃x∈F1
Ux y por ser F1 compacto, ∃x1, . . . , xn
con F1 ⊆ Ux1∪ · · · ∪ Uxn
.Sean U = ∪n
i=1Uxiy V = ∪n
i=1Vxi. Nótese que U y V son abiertos (este

CAPÍTULO 3. COMPACIDAD 49
último por ser intersección finita de abiertos). Claramente F1 ⊆ U yF2 ⊆ V .Por último, U ∩ V = (Ux1
∪ · · · ∪ Uxn) ∩ V = (Ux1∩ V ) ∪ (Ux2
∩ V ) ∪· · · ∪ (Uxn
∩ V ) ⊆ (Ux1∩ Vx1
) ∪ (Ux2∩ Vx2
) ∪ · · · ∪ (Uxn∩ Vxn
) = ∅.Así U ∪ V = ∅.
Nota 3.3.5. La proposición anterior vale para todos los espacios métri-cos.
Proposición 3.3.6. (Teorema de Heine-Borel para la recta euclídea) En(R, euclídea), un conjunto A ⊂ R es compacto si y sólo si es cerrado yacotado.
Demostración. Por el Corolario 3.2.4, si A es cerrado y acotado entonceses compacto. Recíprocamente, si es compacto entonce A es acotado ycerrado por las proposiciones 3.1.13 y 3.3.3, respectivamente.
3.4. Compacidad y continuidad
Proposición 3.4.1. (La continuidad preserva la compacidad)Sea f : (X, T ) → (Y, T ′) una aplicación continua entre espacios topológi-cos. Si A ⊆ X es compacto en (X, T ) entonces f(A) lo es en (Y, T ′).
Demostración. Sea f(A) =⋃
α∈ΛGα con Gα abierto de (Y, T ′), entoncesA ⊆ f−1
(⋃α∈ΛGα
)=
⋃α∈Λ f
−1(Gα) donde f−1(Gα) es abierto por serf continua. Como A es compacto ∃ α1 . . . αn con A ⊆ f−1(Gα1
) ∪ · · · ∪f−1(Gαn
) ⊆ f−1(Gα1∪ · · · ∪ Gαn
), luego f(A) ⊆ Gα1∪ · · · ∪ Gαn
y portanto f(A) es compacto.
Proposición 3.4.2. (Teorema de Weierstrass) Sea f : (X, T ) → (R, euclídea)una aplicación continua, entonces la imagen de cualquier subconjuntocompacto A ⊆ X alcanza su máximo y su mínimo.
Demostración. Por la Proposición 3.4.1, f(A) es un compacto de la rectaeuclídea y por la Proposición 3.3.6 es cerrado y acotado. Por ser acotadof(A) tiene ínfimo y supremo. Pero por ser cerrado estos punto que sonpuntos adherentes por el Ejemplo 2.3.7, están en f(A) = f(A).
Proposición 3.4.3. Sean (X, T ) e (Y, T ′) espacios topológicos com-pactos con la propiedad de Hausdorff. Toda f : (X, T ) → (Y, T ′) continuaes también cerrada.

CAPÍTULO 3. COMPACIDAD 50
Demostración. Sea F cerrado en (X, T ), por ser (X, T ) compacto, F escompacto y usando que f es continua, se tiene que f(F ) es compacto en(Y, T ′), que es un espacio de Hausdorff y tanto f(F ) es cerrado. Así f escerrada.
Nota 3.4.4. En la demostración sólo se ha usado la compacidad de(X, T ) y la propiedad de Hausdorff de (Y, T ′).
Corolario 3.4.5. (Homeomorfismos entre espacios de Hausdorff com-pactos) Toda aplicación biyectiva y continua, f : (X, T ) → (Y, T ′) entreespacios compactos y de Hausdorff es un homeomorfismo.
Demostración. Por la proposición anterior, f es cerrada, y por hipótesis,es continua y biyectiva, por tanto, f es un homeomorfismo.
Ejemplo 3.4.6. La circunferencia unidad, S1 ⊆ R2, es un compacto de(R2, euclidea)Sea f : ([0, 2π], euclídea) → (R2, euclídea) dada por f(t) = (cos t, sen t).
Figura 3.1: Figure
f es continua pues p1 ◦ f(t) = cos t; p2 ◦ f(t) = sen t y [0, 2π] escompacto. Entonces la circunferencia unidad f([0, 2π]) = S1 es compacto.
Ejemplo 3.4.7. En un espacio métrico la intersección arbitraria de com-pactos es siempre un conjunto compacto. En efecto, sean {Aα}α∈Λ com-pactos. Por estar en un espacio métrico, los Aα son cerrados (3.3.3), luego∩α∈ΛAα ⊆ Aα es cerrado y por herencia de compacidad ya que Aα quees compacto, tenemos que ∩α∈ΛAα es compacto.
Ejemplo 3.4.8. Sea la sucesión F1 ⊇ F2 ⊇ . . . de cerrados encaja-dos, distintos del vacío, en un espacio topológico con la propiedad deHausdorff, (X, T ). Si F1 es compacto, entonces, ∩∞
i=1Fi 6= ∅ (Teorema deCantor).
CAPÍTULO 3. COMPACIDAD 51
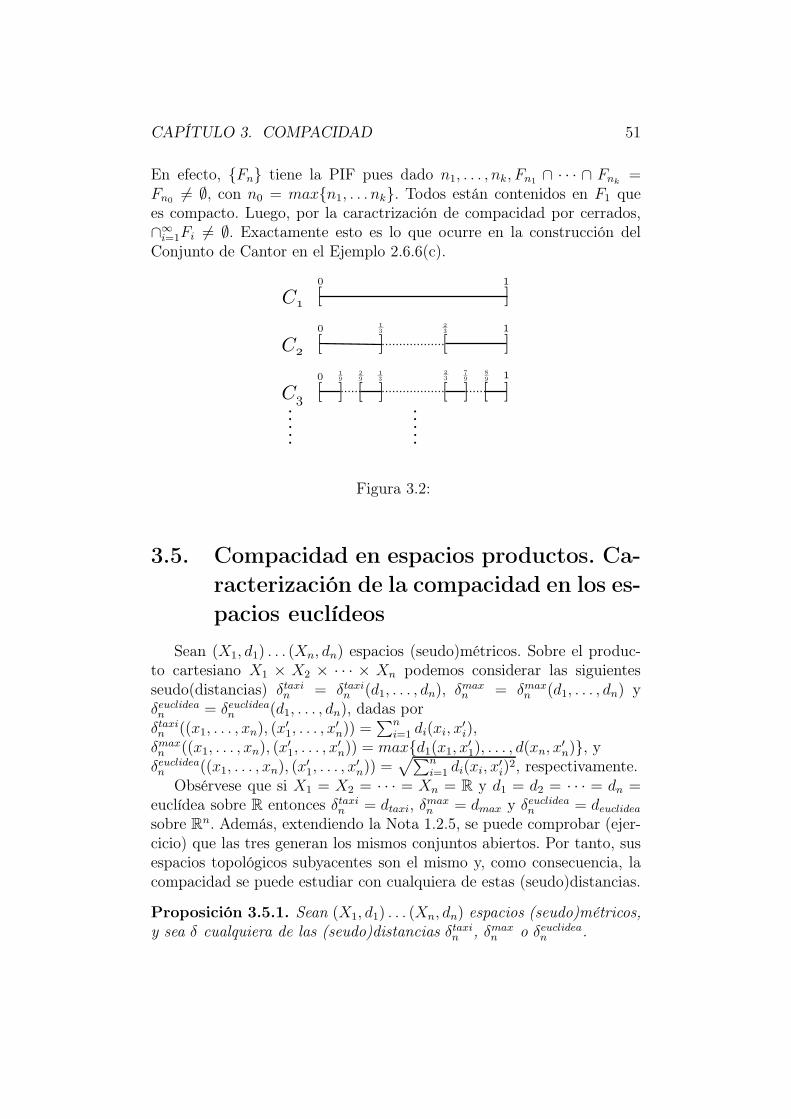
En efecto, {Fn} tiene la PIF pues dado n1, . . . , nk, Fn1∩ · · · ∩ Fnk
=Fn0
6= ∅, con n0 = max{n1, . . . nk}. Todos están contenidos en F1 quees compacto. Luego, por la caractrización de compacidad por cerrados,∩∞
i=1Fi 6= ∅. Exactamente esto es lo que ocurre en la construcción delConjunto de Cantor en el Ejemplo 2.6.6(c).
Figura 3.2:
3.5. Compacidad en espacios productos. Ca-
racterización de la compacidad en los es-
pacios euclídeos
Sean (X1, d1) . . . (Xn, dn) espacios (seudo)métricos. Sobre el produc-to cartesiano X1 × X2 × · · · × Xn podemos considerar las siguientesseudo(distancias) δtaxi
n = δtaxin (d1, . . . , dn), δ
maxn = δmax
n (d1, . . . , dn) yδeuclidean = δeuclidea
n (d1, . . . , dn), dadas porδtaxin ((x1, . . . , xn), (x′1, . . . , x
′n)) =
∑ni=1 di(xi, x
′i),
δmaxn ((x1, . . . , xn), (x′1, . . . , x
′n)) = max{d1(x1, x
′1), . . . , d(xn, x
′n)}, y
δeuclidean ((x1, . . . , xn), (x′1, . . . , x
′n)) =
√∑ni=1 di(xi, x′i)
2, respectivamente.Obsérvese que si X1 = X2 = · · · = Xn = R y d1 = d2 = · · · = dn =
euclídea sobre R entonces δtaxin = dtaxi, δ
maxn = dmax y δeuclidea
n = deuclidea
sobre Rn. Además, extendiendo la Nota 1.2.5, se puede comprobar (ejer-cicio) que las tres generan los mismos conjuntos abiertos. Por tanto, susespacios topológicos subyacentes son el mismo y, como consecuencia, lacompacidad se puede estudiar con cualquiera de estas (seudo)distancias.
Proposición 3.5.1. Sean (X1, d1) . . . (Xn, dn) espacios (seudo)métricos,y sea δ cualquiera de las (seudo)distancias δtaxi
n , δmaxn o δeuclidea
n .

CAPÍTULO 3. COMPACIDAD 52
Si Ai ⊆ Xi, 1 ≤ i ≤ n compacto en (Xi, di), entonces A1 × · · · × An escompacto en (X1 × · · · ×Xn, δ).
Demostración. Haremos la demostración para δ = δmaxn . Es inmediato
comprobar:δmaxn = δmax
2 (δmaxn−1 , dn),
por lo que por inducción basta hacer el caso n=2.Sea ahora {Gα}α∈Λ un recubrimiento por abiertos de A1 × A2 en (X1 ×X2, δ
max2 ). Es decir, A1 × A2 ⊆ ⋃
α∈ΛGα y cada Gα es abierto en (X1 ×X2, δ
max2 ).
Para todo (x, y) ∈ A1 × A2, existe un índice α(x, y) ∈ Λ con (x, y) ∈Gα(x,y). Como Gα(x,y) es abierto, tenemos que ∃ ε(x, y) > 0 tal queBδmax
2((x, y), ε(x, y)) ⊆ Gα(x, y).
Es fácil verificar la siguiente igualdad para todo ε > 0
Bδmax2
((x, y), ε) = Bd1(x, ε) × Bd2
(y, ε).
Fijado y, A1 =⋃
x∈A1{x} ⊆ ⋃
x∈A1Bd1
(x, ε(x, y)). Entonces, por serA1 compacto, ∃ un conjunto finito Jy = {x1, . . . , xn} tales que A1 ⊆Bd1
(x1, ε(x1, y))∪Bd1(x2, ε(x2, y))∪· · ·∪Bd1
(xn, ε(xn, y)). Tomamos εy =min{ε(x1, y), . . . , ε(xn, y)} y consideremos las bolasBd2
(y, εy) con y ∈ A2.Tenemos A2 =
⋃y∈A2
{y} ⊆ ⋃y∈A2
Bd2(y, εy). Entonces, por ser A2 com-
pacto, ∃y1, . . . , yk con A2 ⊆ Bd2(y1, εy1
) ∪ · · · ∪ Bdk(yk, εyk
).Afirmamos que A1 × A2 ⊆ ⋃
1≤i≤k, x∈Jy1∪···∪Jyk
Gα(x,y), que es una unión
finita de los abiertos Gα originales. En efecto sea (x0, y0) ∈ A1 × A2
cualquiera. Entonces existe k0 con 1 ≤ k0 ≤ k con y0 ∈ Bd2(yk0
, εyk0).
Ahora, x0 ∈ A1 ⊆ ⋃x∈Jyk0
Bd1(x, ε(x, yk0
)) y existe x′ ∈ Jyk0con x0 ∈
Bd1(x′, ε(x′, yk0
)).Por definición, εyk0
≤ ε(x′, yk0).
Tenemos (x0, y0) ∈ Bd1(x′, ε(x′, yk0
))×Bd2(yk0
, εyk0) ⊆ Bd1
(x′, ε(x, yk0)×
Bd2(yk0
, ε(x′, yk0)) = Bδmax
2((x′, yk0
), ε(x′, yk0)) ⊆ Gα(x′, yk0
) con x′ ∈Jyk0
y1 ≤ k0 ≤ k.
Corolario 3.5.2. El paralelogramo (producto de intervalos) [a1, b1] ×· · · × [an, bn] es compacto en (Rn, dmax) (o equivalentemente (Rn, dtaxi) o(Rn, deuclidea))
Proposición 3.5.3. (Teorema de Heine-Borel).A ⊆ R es compacto en (Rn, euclídea) si y sólo si A es cerrado y acotado.

CAPÍTULO 3. COMPACIDAD 53
Demostración. ⇒) Tenemos que (Rn,euclídea) es Haussdorff y por tantoA es cerrado (3.3.3) y acotado lo es por 3.1.13.⇐) Como A es acotado, A está contenido en un paralelogramo J , que escompacto por 3.5.2. Entonces A es cerrado en un compacto y por tantoA es compacto por 3.2.3.
Nota 3.5.4. ⇒) Es válida para todo espacio métrico.
Nota 3.5.5. Generalización a espacios topológicos: Si (X1, T1) y (X2, T2)espacio topológico. Se define sobreX1×X2 la topología producto, T1∗T2 ={∅ y G ⊆ X1 ×X2, tales que para todo (x, y) ∈ G existen U y V abiertosde T1 y T2 con (x, y) ∈ U × V ⊆ G}. Se puede demostrar, con unademostración similar a la de 3.5.1 que si A1 y A2 son compactos de(X1, T1) y (X2, T2), respectivamente, entonces A1 × A2 es un compactode (X1 ×X2, T1 ∗ T2).
3.6. Compacidad en espacios métricos
Proposición 3.6.1. Sea (X, d) espacio métrico y {xn}n≥1 ⊆ X unasucesión sin subsucesiones convergentes. Entonces:
1. El conjunto A = {x1, x2, x3, . . . , xn, . . . } es infinito.
2. El conjunto de puntos de acumulación de A, A′ = ∅, es vacío.
Demostración.
1. R.A.: Supongamos que A es finito, entonces cierto elemento xn0
aparece infinitas veces en la sucesión. Por tanto, xn0= xn1
= xn2=
· · · = xnk= . . . con n0 < n1 < n2 . . . < nk < . . . . Luego existe una
subsucesión constante, y por tanto convergente. Contradicción!
2. R.A.: Si x0 ∈ A′, entonces por estar en un espacio métrico, tenemosque cualquier bola abierta de centro x0 contiene inifinitos puntosde A: Así:∃xn1
∈ Bd(x0, 1)∃xn2
∈ Bd
(x0,
12
)con n2 > n1
∃xn3∈ Bd
(x0,
13
)con n3 > n2 > n1
. . .∃xnk
∈ Bd
(x0,
1k
)con nk > nk−1 > . . . > n1
. . .

CAPÍTULO 3. COMPACIDAD 54
Es decir, existe una subsucesión {xk}k≥1 de {xn}n≥1 convergiendo a
x0. En efecto, dado ε > 0, sea k0 con1
k 0< ε, entonces d(xnk
, x0) =
1
k<
1
k 0si k ≥ k0. Llegamos a contradicción. Por tanto, A′ = ∅.
Luego, A = A ∪ A′ = A, lo que implica que A es cerrado.
Corolario 3.6.2. (Propiedad de Bolzano-Weierstrass). Si (X, d) es unespacio métrico compacto entonces toda sucesión en X posee una sub-sucesión convergente.
Demostración. R.A.: Supongamos que ∃{xn}n≥1 sucesión sin sucesionesconvergentes. Entonces, por la propiedad anterior:
1. A = {x1, . . . , xn, . . . } es infinito.
2. A′ = ∅, lo que implica que todos los puntos de A son aislados. Esdecir, ∀xn ∃εn con Bd(xn, εn) ∩ A = {xn}
3. A es cerrado y por tanto compacto al ser (X, d) compacto. ComoA ⊆ ⋃∞
n=1Bd(xn, εn), ∃n1, . . . , nk con A ⊆ Bd(xn1, εn1
) ∪ · · · ∪Bd(xnk
, εnk). Luego A = {xn1
, . . . , xnk}; es decir, A es finito, lo que
contradice el apartado (1).
Proposición 3.6.3. (Teorema de Bolzano-Weierstrass) El recíproco tam-bién es cierto, es decir, un espacio métrico (X, d) es compacto si y sólosi posee la propiedad de Bolzano-Weierstrass.
Demostración. El recíproco es consecuencia de las dos siguientes proposi-ciones.
Proposición 3.6.4. Sea (X, d) espacio métrico con la propiedad de Bolzano-Weierstrass. Entonces para cualquier ε > 0, X se puede cubrir con unacantidad finita de bolas de radio ε.
Demostración. R.A.: Supongamos que ∃ε0 tal que X no se cubre conuna cantidad finita de bolas de radio ε0. Entonces tomamos x1 ∈ Xcualquiera:X 6= Bd(x1, ε0) (en caso contrario, X quedaría cubierto con una sólo unabola de radio ε0), entonces ∃x2 ∈ X tal que x2 6∈ Bd(x, ε0) (si no, dos

CAPÍTULO 3. COMPACIDAD 55
bolas de radio ε0 bastarían para cubrir X), luego d(x1, x2) ≥ ε0.De nuevo:X 6= Bd(x1, ε0) ∪ Bd(x2, ε0), entonces, x3 ∈ X tal que x3 6∈ Bd(x1, ε0) ∪Bd(x2, ε0), luego d(x1, x3) ≥ ε0 y d(x2, x3) ≥ ε0.Reiterando el proceso, construimos una sucesión {xn}n≥1 ⊆ X tal qued(xn, xm) ≥ ε0 si m ≤ n Por la propiedad de Bolzano-Weierstrass,∃{xnk
}k≥1 subsucesión convergiendo a algún x0 ∈ X. Entonces si tomamos
la bola Bd
(x0,
ε0
2
), debe existir k0 con xnk
∈ Bd
(x0,
ε0
2
)si k ≥ k0. En-
tonces, si k, s ≥ k0,
d(xnk, xns
) ≤ d(xnk, x0) + d(xns
, x0) <ε0
2+ε0
2= ε0.
Contradicción.
Proposición 3.6.5. (Lema de Lebesgue) Sea (X, d) un espacio métri-co con la propiedad de Bolzano-Weierstrass, entonces dado cualquierrecubrimiento U = {Uα}α∈Λ de X existe ε > 0 (llamado número deLebesgue de U) tal que para cada bola abierta de radio ε, Bd(x, ε) existeα0 ∈ Λ con Bd(x, ε) ⊆ Uα0
Demostración. R.A.: Supongamos que para ε > 0, ∃xε ∈ X conBd(xε, ε) *Gα, ∀α ∈ Λ, tenemos quedado ε1 = 1, ∃x1 con Bd(x1, ε1) * Uα, ∀αdado ε2 =
1
2, ∃x2 con Bd(x2, ε2) * Uα, ∀α
. . .
dado εn =1
n, ∃xn con Bd(xn, εn) * Uα, ∀α.
. . .Es decir, hemos construido una sucesión {xn}n≥1 ⊆ X que, por la propiedadde Bolzano-Weierstrass, debe contener una subsucesión {xnk
}k≥1 que con-verge a algún x0 ∈ X =
⋃α∈Λ Uα. Entonces ∃α0 ∈ Λ con x0 ∈ Uα0
. Seaδ > 0 tal que Bd(x0, δ) ⊆ Uα0
.
Por convergencia, dadoδ
2, ∃k0 tal que d(x0, xnk
) <δ
2si k ≥ k0. Por
tanto, x0 ∈ Bd
(xnk
,δ
2
). Sea k1 > k0 con
1
nk1
<δ
2. Afirmamos que
Bd
(xnk1
,1
nk1
)⊆ Bd(x0, δ) ⊆ Uα0
, lo que lleva a contradicción con la
elección de los xn.
Si y ∈ Bd
(xnk1
,1
nk1
), entonces d(xnk
, y) <1
nk1
<δ
2, y
d(x0, y) ≤ d(x0, y) ≤ d(x0, xnk) + d(xnk
, y) <δ
2+δ
2= δ,

CAPÍTULO 3. COMPACIDAD 56
Figura 3.3:
luego, y ∈ Bd(x0, δ).
Nota 3.6.6. El lema de Lebesgue implica que si A ⊆ X es cualquierconjunto con diámetro δ(A) < ε, entonces A ⊆ Uα0
para algún α0 ∈ Λ.En efecto, si a ∈ A, δ(A) < ε implica que A ⊆ Bd(a, ε) y esta bola estácontenida en algún Uα por el lema de Lebesgue.
Demostración. (Final de la demostración del teorema de Bolzano-Weierstrass).Sea X =
⋃α∈Λ Uα con U = {Uα}α∈Λ un recubrimiento por abiertos de
X. Entonces, por el lema de Lebesgue, ∃ε > 0 tal que ∀x ∈ X ex-iste α(x) ∈ Λ con Bd(x, ε) ⊆ Uα(x), aplicando 3.6.4, ∃x1, . . . , xn conX = Bd(x1, ε) ∪ · · · ∪ Bd(xn, ε) ⊆ Uα(x1) ∪ Uα(x2) ∪ · · · ∪ Uα(xn), luegoX = Uα(x1) ∪ Uα(x2) ∪ · · · ∪ Uα(xn). Por tanto (X, d) es compacto.
Definición 3.6.7. Sea f : (X, d) → (Y, d′) entre espacios (seudo)métricos.Decimos que f es uniformemente continua si dado ε > 0, ∃δ > 0 tal quesi d(x, x′) < δ, entonces d′(f(x), f(x′)) < ε.
Proposición 3.6.8. (Teorema de Heine). Sea f : (X, d) → (Y, d′) con(X, d) espacio métrico compacto. Entonces, si f es continua, f es uni-formemente continua.
Demostración. Tomemos ε > 0. Para cada y ∈ Y consideramos la bola
abierta Bd′
(y,ε
2
). Tenemos Y =
⋃y∈Y Bd′
(y,ε
2
)y por continuidad,

CAPÍTULO 3. COMPACIDAD 57
f−1(Bd′
(y,ε
2
))es abierto de (X, d) y X =
⋃y∈Y f
−1(Bd′
(y,ε
2
)).
Por tanto, U ={f−1
(Bd′
(y,ε
2
))}y∈Y
es un recubrimiento por abiertos
de X.Aplicando el lema de Lebesgue, ∃µ > 0 tal que si δ(A) < µ entonces,A está contenido en algún abierto de U . Si x, x′ ∈ X con d(x, x′) < µ,entoncesδ({x, x′}) < µ, luego ∃y0 ∈ Y con {x, x′} ⊆ f−1
(B′
d
(y0,
ε
2
)).
Así que f(x), f(x′) ∈ B′d
(y0,
ε
2
). Por tanto,
d′(f(x), f(x′)) < d′(f(x), y0) + d′(y0, f(x′)) <ε
2+ε
2= ε.
Ejemplo 3.6.9. Hay espacios métricos con conjuntos cerrados y acota-dos que no son compactos.Sea X = {f : [0, 1] → [0, 1] continuas} y d = d∞ la distancia d∞(f, g) =supx∈[0,1]{|f(x)−g(x)|} = maxx∈[0,1]{|f(x)−g(x)|}. En (X, d) considere-mos la bola cerrada A = Bd[θ, ε] con θ = constante 0 y ε arbitrario perofijo. A es cerrado y acotado pero no es compacto. Veamos esto ultimo:R.A.: Sea {fn}n≥1 la sucesión en Bd[θ, ε] indicada en la figura. Si Afuese compacto, por la propiedad de Bolzano-Weierstrass, ∃{fnk
}k≥1 sub-sucesión convergiendo a algún f0 ∈ A. Luego dado µ > 0, ∃k0 cond(fnk
, f0) < µ, ∀k ≥ k0. Es decir, |fn(x) − f0(x)| < µ, ∀x ∈ [0, 1].
Si x 6= 0, sea k con1
nk< x y k ≥ k0. Lo que implica que fn(x) = 0 y
|f0(x)| < µ, ∀µ > 0. Por tanto, f0(x) = 0, y por ser f0 continua tene-mos que f0(0) = 0, luego f0 = θ. Pero d(fnk
, f0) = d(fnk, θ) = ε (fijo).
Contradicción.
Figura 3.4:

CAPÍTULO 3. COMPACIDAD 58
3.7. Compacidad y completitud
Definición 3.7.1. Sea (X, d) un espacio (seudo)métrico. Una sucesión{xn}n≥1 ⊆ X se dice de Cauchy si dado ε > 0, ∃n0 con d(xn, xn′) < εpara todo n, n′ ≥ n0.
Proposición 3.7.2. Toda sucesión de Cauchy está acotada.
Demostración. Sea (X, d) un espacio (seudo)métrico y {xn}n≥1 ⊆ X unasucesión de Cauchy. Entonces, existe n0 tal que para todo n,m ≥ n0
d(xn, xm) < 1. Si r > máx {1, d(xn0, xi); 1 ≤ i ≤ n0 − 1}, tenemos que
d(xn0, xn) < r para todo n ≥ 1 y la sucesión está acotada.
Proposición 3.7.3. Toda sucesión convergente es de Cauchy.
Demostración. Si {xn}n≥1 converge a x0 en (X, d) entonces dadoε
2existe
n0 tal que d(xn, x0) <ε
2si n ≥ n0, por lo que
d(xn, xn′) ≤ d(xn, x0) + d(x0, xn′) <ε
2+ε
2= ε
si n, n′ ≥ n0.
Definición 3.7.4. Un espacio (seudo)métrico (X, d) se dice completo sitoda sucesión de Cauchy en (X, d) es convergente.
Proposición 3.7.5. Todo espacio métrico compacto (X, d) es completo.
Demostración. Sea {xn}n≥1 ⊆ X de Cauchy. Por la propiedad de Bolazano-Weierstrass, existe una subsucesión {xnk
}k≥1 convergente a algún x0 ∈ X.Afirmamos que {xn}n≥1 converge a x0. En efecto, dado ε > 0 :
Por Cauchy, ∃n0 con d(xn, x′n) <
ε
2si n, n′ ≥ n0
Por convergencia, ∃k0 con d(xnk, x0) <
ε
2si k ≥ k0.
Sea n1 = max{n0, nk0}, entonces si n ≥ n1 y nk ≥ n1,
d(xn, x0) ≤ d(xn, xnk) + d(xnk
, x0) <ε
2+ε
2= ε. Luego {xn}n≥1 converge
a x0.
Corolario 3.7.6. Los espacios euclídeos (Rn, euclídea) son completos.
Demostración. Sea {xn}n≥1 ⊆ Rn una sucesión de Cauchy. Por 3.7.2tenemos que esta sucesíón está acotada y por tanto existe r tal que{xn}n≥1 ⊆ Bde
[x1, r] donde de denota la distancia euclídea. Como lasbolas euclídeas cerradas son compactos, se sigue de 3.7.5 que la sucesión{xn}n≥1 converge en Bde
[x1, r] y por tanto en (Rn, euclídea).

CAPÍTULO 3. COMPACIDAD 59
3.8. Compacidad local
Definición 3.8.1. Un espacio topológico (X, T ) se dice localmente com-pacto si ∀x ∈ X y cualquier entorno N de x existe otro entorno N ′ de xcon N ′ ⊆ N y N ′ compacto.
Proposición 3.8.2. Sea (X, d) un espacio (seudo)métrico. Son equi-valentes:
1. (X, d) es localmente compacto.
2. Dado x ∈ X existe una bola cerrada Bd[x, ε] que es compacta.
3. Todo x ∈ X posee un entorno N en (X, T ) que es compacto.
Demostración. 1) ⇒ 2) : Por hipótesis, como X es entorno de cualquierx ∈ X existe N entorno compacto de x, luego ∃δ > 0 con Bd(x, δ) ⊆ N.
Si ε =δ
2, Bd[x, ε] ⊆ Bd(x, δ) ⊆ N, y como Bd[x, ε] es cerrado y N es
compacto, entonces Bd[x, ε] es compacto.2) ⇒ 3) : Es trivial tomando N = Bd[x, ε].3 ⇒ 1 : Sea M cualquier entorno de de x. Entonces x ∈ intM y existeδ > 0 con Bd(x, δ) ⊆M . Dado el entorno compacto N proporcionado por3), también existe ε > 0 con Bd(x, ε) ⊆ N . Sea µ < min{ε, δ}, entoncesN ′ = Bd[x, µ] ⊆ Bd(x, δ) ⊆M es un entorno de x y como Bd[x, µ) ⊆ N ′,por tanto, N ′ es entorno de x. Por último, como N ′ ⊂ B(x, ε) ⊂ N es uncerrado contenido en el conjunto compacto N , N ′ es compacto.
Ejemplo 3.8.3. Los espacios euclídeos (Rn, euclídea) son localmentecompactos (es más, en ellos toda bola cerrada es compacta).
Ejemplo 3.8.4. ((0, 1), euclídea) es localmente compacto ya que cumplela segunda condición del teorema anterior. Sin embargo no todas lasbolas cerradas son compactas ya que por ejemplo Bd[
12, 1] = (0, 1) no es
compacto.
Ejemplo 3.8.5. El espacio de funciones continuas (X, d) de 3.6.9 no eslocalmente compacto en θ = constante 0.
Ejemplo 3.8.6. (Q, d = euclídea) no es localmente compacto. Si lofuese, dado x ∈ Q, ∃ε > 0 tal que Bd[x, ε] = [x − ε, x + ε] ∩ Q debe sercompacto. Pero se serlo, lo sería también en (R, euclídea) y allí no escerrado. Por tanto, Bd[x, ε] no es compacto.
CAPÍTULO 3. COMPACIDAD 60
Proposición 3.8.7. Sea (X, d) un espacio (seudo)métrico localmentecompacto.
1. Si A ⊆ X es cerrado, (A, d|A) es localmente compacto.
2. Si B ⊆ X es cerrado, (B, d|B) es localmente compacto.
Demostración.
1. Sea a ∈ A. Como A es abierto, A es entorno de a. Como (X, d)es localmente compacto, ∃N ′ ⊆ A,N ′ entorno compacto de x en(X, d).Por ser N ′ entorno de x, ∃ε > 0 tal que Bd[a, ε] ⊆ N ′ ⊆ A. Portanto, Bd|A[a, ε] = Bd[a, ε] es compacto. Así obtenemos que (A, d|A)es localmente compacto.
2. Sea b ∈ B. Como (X, d) es localmente compacto, ∃ε > 0 con Bd[b, ε]es compacto. Además Bd|B[b, ε] = B ∩ Bd[b, ε] es cerrado de latopología relativa de Bd[b, ε] que es compacto. Luego Bd|B[b, ε] escompacto. Por tanto, (B, d|B) es localmente compacto.
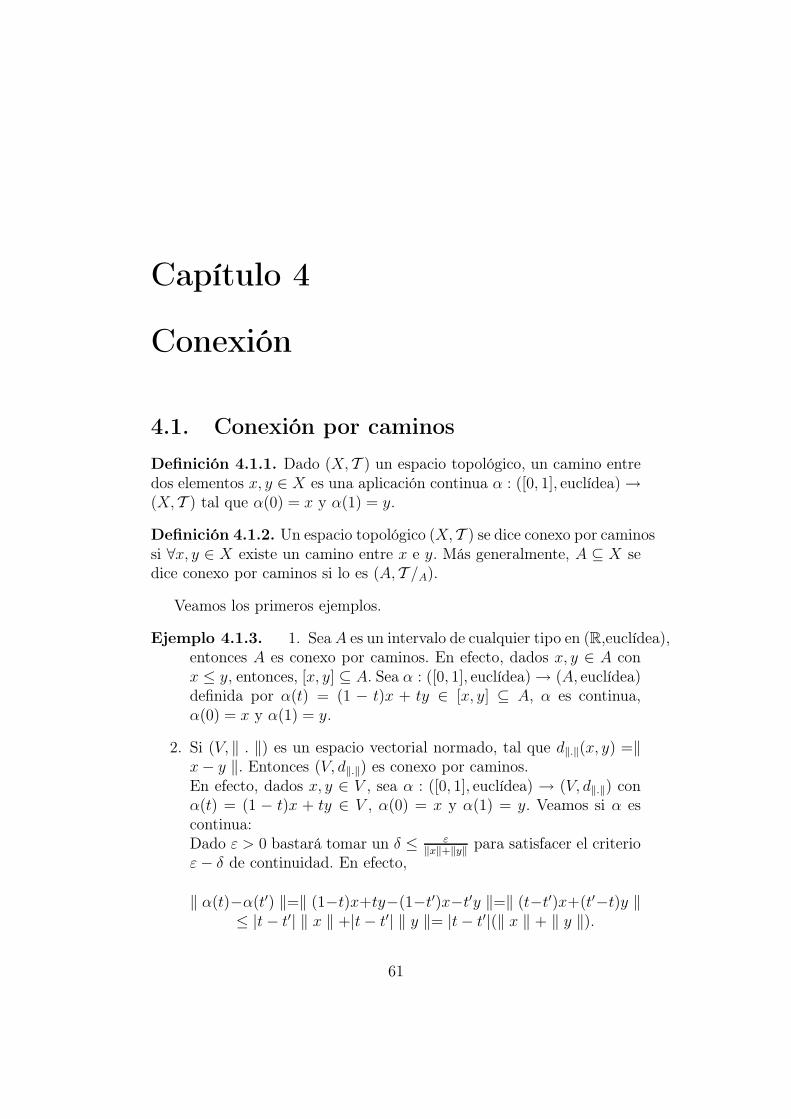
Capítulo 4
Conexión
4.1. Conexión por caminos
Definición 4.1.1. Dado (X, T ) un espacio topológico, un camino entredos elementos x, y ∈ X es una aplicación continua α : ([0, 1], euclídea) →(X, T ) tal que α(0) = x y α(1) = y.
Definición 4.1.2. Un espacio topológico (X, T ) se dice conexo por caminossi ∀x, y ∈ X existe un camino entre x e y. Más generalmente, A ⊆ X sedice conexo por caminos si lo es (A, T /A).
Veamos los primeros ejemplos.
Ejemplo 4.1.3. 1. Sea A es un intervalo de cualquier tipo en (R,euclídea),entonces A es conexo por caminos. En efecto, dados x, y ∈ A conx ≤ y, entonces, [x, y] ⊆ A. Sea α : ([0, 1], euclídea) → (A, euclídea)definida por α(t) = (1 − t)x + ty ∈ [x, y] ⊆ A, α es continua,α(0) = x y α(1) = y.
2. Si (V, ‖ . ‖) es un espacio vectorial normado, tal que d‖.‖(x, y) =‖x− y ‖. Entonces (V, d‖.‖) es conexo por caminos.En efecto, dados x, y ∈ V , sea α : ([0, 1], euclídea) → (V, d‖.‖) conα(t) = (1 − t)x + ty ∈ V , α(0) = x y α(1) = y. Veamos si α escontinua:Dado ε > 0 bastará tomar un δ ≤ ε
‖x‖+‖y‖para satisfacer el criterio
ε− δ de continuidad. En efecto,
‖ α(t)−α(t′) ‖=‖ (1−t)x+ty−(1−t′)x−t′y ‖=‖ (t−t′)x+(t′−t)y ‖≤ |t− t′| ‖ x ‖ +|t− t′| ‖ y ‖= |t− t′|(‖ x ‖ + ‖ y ‖).
61

CAPÍTULO 4. CONEXIÓN 62
La siguiente proposición muestra que todos los espacios conexos porcaminos tienen sólo al espacio total y el vacío como conjuntos simultánea-menta abiertos y cerrados.
Proposición 4.1.4. Si (X, T ) es conexo por caminos, entonces los úni-cos conjuntos abiertos y cerrados de (X, T ) son X y ∅.
Demostración. Razonamos por R.A. y suponemos que A ⊂ X es unconjunto abierto y cerrado con A 6= X, ∅. Sea x0 ∈ A (aquí usamos queA 6= ∅) y x1 /∈ A (aquí aplicamos que A 6= X). Por hipótesis existeun camino α : ([0, 1], euclídea) → (X, T ) con α(0) = x1 y α(1) = x2.Como α es continua el conjunto α−1(A) es tanto abierto como cerrado de([0, 1], euclídea). Ahora bien, A no es el conjunto vacío pues 0 ∈ α−1(A)y tampoco es todo [0, 1] pues 1 /∈ α−1(A). Esto contradice la Proposición2.7.6.
Para los intervalos de R el recíproco de la proposición anterior tambiénes cierto y ello nos permite determinar todos los conjuntos conexos porcaminos de la recta euclídea. Explícitamente,
Proposición 4.1.5. (Caracterización de los conjuntos conexos por caminosde la recta euclídea)En (R,euclídea), las siguientes propiedades son equivalentes para cualquierA ⊆ R.
1. A es conexo por caminos.
2. Los únicos conjuntos que son a la vez abiertos y cerrados en (A,euclídea)son A y ∅.
3. Si a ≤ b con a, b ∈ A, entonces [a, b] ⊆ A.
4. A es un intervalo.
Demostración. (1) ⇒ (2) es un caso particular de la Proposición 4.1.4.Para probar la implicación (2)⇒ (3) se razona por R.A. Si existe a < t < bcon t /∈ A. Entonces A∩ (−∞, t) = A∩ (−∞, t] sería un conjunto abiertoy cerrado en (A; euclídea), lo que contradice (2).
Para demostrar (3)⇒ (4)veremos las distintas posibilidades que tieneel conjunto A respecto a su supremo e ínfimo.

CAPÍTULO 4. CONEXIÓN 63
1. Supongamos que A no tiene ni supremo ni ínfimo. En este casodado n ∈ N existen an, bn ∈ A tales que an < −n y bn > n.Entonces [−n, n] ⊂ [an, bn]. Por (3), [an, bn] ⊆ A, para todo n.
Ahora R =∞⋃
n=1
[−n, n] ⊆∞⋃
n=1
[an, bn] ⊆ A ⊆ R entonces A = R.
2. Supongamos que A tiene supremo pero no ínfimo. Probaremos sóloel caso en el que A tiene máximo. El caso en el que el supremo nosea máximo es análogo al caso 3 que sigue (se deja como ejercicio).Sea b = maxA. Como ∄ ınf A ⇒ ∀n ≥ 1 ∃an ∈ A con an ≤ −n.Por (3) se tiene que [an, b] ⊆ A. Entonces
(−∞, b] =∞⋃
n=1
[−n, b] ⊆∞⋃
n=1
[an, b] ⊆ A ⊆ (−∞, b] ⇒ A = (−∞, b]
3. Supongamos que A tiene ínfimo pero no supremo. Probaremos sóloel caso en el que A no tiene mínimo.Sea a = ınf A, con a 6∈ A . Entonces se tiene ∀n ≥ 1 ∃bn ∈ A conbn ≥ n y ∃an ∈ A con an ≤ a + 1
n. Por (3) se sigue [an, n] ⊆ A ⇒
∞⋃
n=1
[an, n] ⊆ A. También [a+ 1n, n] ⊆ [an, n] ⇒
∞⋃
n=1
[a+1
n, n] ⊆ A.
Ahora
∞⋃
n=1
[a +1
n, n] = (a,+∞) ⊆ A. Además A ⊆ (a,∞) por
a = ınf A y a 6∈ A. Así A = (a,∞).Si el ínfimo es mínimo se deja como ejercicio. La demostración esanáloga al caso 2.
4. Supongamos que A tiene supremo e ínfimo. Probaremos primero elcaso en el que existe máximo pero no mínimo. Sean b = maxA ya = ınf A con a 6∈ A. Igual que en el caso anterior, ∀n ≥ 1, ∃an ∈ Acon an ≤ a+ 1
n.
Entonces de (3) concluimos [an, b] ⊆ A. Luego
(a, b] =∞⋃
n=1
[a+1
n, b] ⊆
∞⋃
n=1
[an, b] ⊆ A ⊆ (a, b]
De esta forma A = (a, b].
Veamos ahora el caso en el que A tiene mínimo y máximo.

CAPÍTULO 4. CONEXIÓN 64
Sea a = mınA y b = maxB. Entonces A ⊆ [a, b] ⊆ A. Luego,[a, b] = A
Por último veamos si A no tiene máximo ni mínimo.Sea a = ınf A y b = supA ninguno de ellos perteneciente a A. En-tonces ∀n ≥ 1, ∃an ∈ A y ∃bn ∈ A con an ≤ a+ 1
ny bn ≥ b− 1
n.
Por (3) se tiene [an, bn] ⊆ AFinalmente,
[a+ 1n, b− 1
n] ⊆ [an, bn]
(a, b) =⋃∞
n=1[a+ 1n, b− 1
n] ⊆ ⋃∞
n=1[an, bn] ⊆ A ⊆ (a, b)
Por tanto, A = (a, b).
No probaremos el caso en el que A no tiene máximo pero sí mínimoque dejaremos como ejercicio.
Finalmente (4)⇒ (1) es inmediata pues ya sabemos que todo intervaloes conexo por caminos.
Proposición 4.1.6. Sea f : (X, T ) → (Y, T ′) continua. Si A ⊆ X esconexo por caminos f(A) también.
Consecuencia: Si f es homeomorfismo y (X, T ) es conexo por caminos,entonces (Y, T ′) también lo es.
Demostración. Sea f : (A, T /A) → (f(A), T ′/f(A)) la restricción sobre la
imagen. Como f es continua, f también lo es.Dados p, q ∈ f(A) entonces existe x, y ∈ A con f(x) = p y f(y) = q.
Como (A, T /A) es conexo por caminos ∃α : ([0, 1], euclídea) → (A, T /A)continua con α(0) = x y α(1) = y. Sea β : ([0, 1], euclídea) → (f(A), T ′/f(A)),
la composición β = f ◦ α para la cual
β(0) = f ◦ α(0) = f(x) = p
β(1) = f ◦ α(1) = f(y) = q
}
lo que demuestra que f(A) es conexo por caminos.
Proposición 4.1.7. Sean (X1, d1) y (X2, d2) e. (seudo)métricos conexospor caminos. Entonces (X1 ×X2, δ
max2 ) es conexo por caminos, donde

CAPÍTULO 4. CONEXIÓN 65
Figura 4.1:
δmax2 (d1, d2)((x1, x2), (x
′1, x
′2)) = max{d1(x1, x
′1), d2(x2, x
′2)}
Demostración. Sean α1 : ([0, 1], euclídea) → (X1, d1) un camino de x1 ax′1 y α2 : ([0, 1], euclídea) → (X2, d2) un camino de x2 a x′2. Definimosα : ([0, 1], euclídea) → (X1×X2, δ
max2 ), por α(t) = (α1(t), α2(t)). Es claro
que α(0) = (α1(0), α2(0) = (x1, x2) y α(1) = (α1(1), α2(1) = (x′1, x′2).
Probemos la continuidad de α. Para ello sea t y ε > 0, veamos si existeµ tal que si | t− t′ |< µ entonces
δmax2 (α(t), α(t′)) = max{d1(α1(t), α1(t
′)), d2(α2(t), α2(t′))} < ε.
Se tiene:
α(1) continua ⇒ ∃µ1 con d1(α1(t), α1(t′)) < ε si | t− t′ |< µ1
α(2) continua ⇒ ∃µ2 con d2(α2(t), α2(t′)) < ε si | t− t′ |< µ2
Sea µ = mın{µ1, µ2}, entonces δmax2 (α(t), α(t′)) < ε.
Nota 4.1.8. La proposición anterior es válida también para las (seu-do)distancias δtaxi
2 y δeuclidea2 ; ver Sección 3.5. Más generalmente, la proposi-
ción es válida para (X1×X2, T1∗T2) donde T1∗T2 es la topología productoen 3.5.5. Igualmente se puede generalizar a un número cualquiera de fac-tores (X1, d1), ..., (Xn, dn) con n ≥ 2.
Proposición 4.1.9. La relación “estar conectados por un camino en(X, T ).es de equivalencia. La denotaremos por ∼.
Demostración. Veamos las condiciones de relación de equivalencia:
1. Reflexiva: x ∼ x por α : ([0, 1], euclídea) → (X, T ) dada por α(t) =x ∀t.

CAPÍTULO 4. CONEXIÓN 66
2. Simétrica: x ∼ y ⇒ ∃α camino con α(0) = x y α(1) = y.Sea ρ : ([0, 1], euclídea) → ([0, 1], euclídea) la aplicación contin-ua ρ(t) = 1 − t. También será continua, por tanto, α = α ◦ ρ :([0, 1], euclídea) → (X, T ) con α(0) = α ◦ ρ(0) = α(1) = y yα(1) = α ◦ ρ(1) = α(0) = x.Luego y ∼ x.
3. Transitiva: x ∼ y ⇒ ∃α con α(0) = x y α(1) = y. Por otro lado,y ∼ z ⇒ ∃β con β(0) = y y β(1) = z.
Figura 4.2:
Sea η : [0, 12] → [0, 1] tal que η(t) = 2(t). De igual forma, sea
ξ : [12, 1] → [0, 1] tal que ξ(t) = 2t − 1. Ambas aplicaciones son
obviamente continuas.Sean α = α ◦ η : [0, 1
2] → X con α(t) = α ◦ η(t) = α(2t) y β =
β ◦ ξ : [12] → X con β(t) = β ◦ ξ(t) = β(2t− 1).
Entonces se define γ : [0, 1] → X por
γ(t) =
{α(t) = α(2t) si t ≤ 1
2
β(t) = β(2t− 1) si t ≥ 12
γ está bien definida por γ(12) = α(1) = β(0) = y. Comprobemos
que γ es continua.Sea F cerrado de (X, T ) se tiene γ−1(F ) = α−1(F )∪β−1(F ), donde,por continuidad, α−1(F ) = H ∩ [0, 1
2], con H cerrado de [0, 1]. Y
por tanto α−1(F ) es cerrado de [0,1]. Análogamente β−1(F ) es cer-rado de [0, 1]. Por tanto, se deduce que γ−1(F ) es cerrado de [0, 1].Finalmente,
γ(0) = α(0) = α(0) = x
γ(1) = β(1) = β(1) = z
}
lo que demuestra que x ∼ z.

CAPÍTULO 4. CONEXIÓN 67
Proposición 4.1.10. Sea {Cα}α∈Λ familia de conexos por caminos en(X, T ). Supongamos que ∃α0 ∈ Λ tal que Cα∩Cα0
6= ∅ ∀α ∈ Λ. Entonces
C0 =⋃
α∈Λ
Cα es conexo por caminos.
Demostración. Sean x, x′ ∈ C0, entonces x ∈ Cα para algún α ∈ Λ yx′ ∈ Cα′ para algún α′ ∈ Λ.Como Cα ∩Cα0
6= ∅ entonces ∃x0 ∈ Cα ∩Cα0. Luego x se conecta con x0
por un camino en Cα ⊆ C0.Igual existe x′0 ∈ Cα′ ∩ Cα0
, luego x′0 y x′ se conectan por un camino enCα′ ⊆ C0.
Figura 4.3:
Además, Cα0conexo por caminos implica que x0 y x′0 se conectan por
un camino en Cα0⊆ C0
Aplicamos la propiedad transitiva de 4.1.9 y obtenemos que x y x′ seconectan por un camino en C0; es decir, C0 es conexo por caminos.
Proposición 4.1.11. (Variante 1) Supongamos que la familia en 4.1.10
cumple ahora que Cα ∩ Cα′ 6= ∅ ∀α, α′; en particular si⋂
α∈Λ
Cα 6= ∅.
Entonces C sigue siendo conexo por caminos.
Demostración. La demostración es análoga a la anterior, tomando comoα0 cualquier α.
Proposición 4.1.12. (Variante 2) Sean C1, C2, ..., Cn una sucesión desubconjuntos conexos por caminos de algún espacio topológico (X, T ) tal
que Ci ∩ Ci+1 6= ∅ ∀i ≥ 1. Entonces C =
∞⋃
n=1
Cn es conexo por caminos.

CAPÍTULO 4. CONEXIÓN 68
Figura 4.4:
Demostración. SeaD1 = C1 es conexo por caminos.D2 = C1 ∪ C2 es conexo por caminos por 4.1.11.D3 = C1∪C2∪C3 = D2∪C3 es conexo por caminos ya que D2 es conexopor caminos y D2 ∩ C3 6= ∅
...
Dn =n⋃
i=1
Ci = Dn−1 ∪ Cn es conexo por caminos pues Dn−1 es conexo
por caminos y Dn−1 ∩ Cn 6= ∅.
Tenemos que C =
∞⋃
n=1
Dn. Ahora bien, los Di son conexos por caminos y
∩∞n=1Dn = D1, y de 4.1.11 se sigue que C es conexo por caminos.
Terminamos esta sección con algunos ejemplos de espacios bien cono-cidos que son conexos por caminos.
Ejemplo 4.1.13. 1. Cualquier paralelogramo P = J1×J2×...×Jn en(Rn,euclídea) con Ji un intervalo (en particular Rncon Ji = R ∀i ≤n) es conexo por caminos. En efecto, por 4.1.3(1) P es conexo enel espacio métrico (Rn, δmax) que tiene el mismo espacio topológicosubyacente que la distancia euclídea sobre Rn.
2. El círculo unidad C = {(x, y) ∈ R; x2 + y2 ≤ 1} es conexo porcaminos ya todo punto se puede unir al origen (de hecho C es unconjunto convexo).
3. La circunferencia unidad S1 en (R2,euclídea) es conexa or caminos.Basta tomar f : ([0, 2π], euclídea) → (R2, euclídea) dada por f(t) =(cos t, sen t). f es continua y [0, 2π] conexo por caminos, por tantotambién lo es f([0, 2π]) = S1.
4. La esfera unidad S2 ⊆ R3 es conexa por caminos en (R3,euclídea).Para ello consideramos los hemisferios E2
+ = {(x, y, z) ∈ S2; z ≥ 0}

CAPÍTULO 4. CONEXIÓN 69
Figura 4.5:
y E2− = {(x, y, z) ∈ S2; z ≤ 0} y si B2 es el disco unidad de R2
definimos p : S2 → B2 por p(x, y, z) = (x, y, 0). Obsérvese que larestricción de p a E2
+ es un homeomorfismo p+. Análogamente loses la restricción a E2
−. Sabemos que el disco unidad es conexo porcaminos. Se tiene que E2
+ y E2− son conexos por caminos y por tanto
lo son E2+ y E2
−. Además los hemisferios se cortan en el ecuador.Por tanto, la esfera unidad es conexa por caminos.
Figura 4.6:
5. El cilindro C en (R3,euclídea) es conexo por caminos. Nótese queC = S1 × R que es conexo por caminos por serlo S1 y R.

CAPÍTULO 4. CONEXIÓN 70
Figura 4.7:
4.2. Componentes conexas por caminos. Conex-
ión local por caminos
Definición 4.2.1. Sea (X, T ) un espacio topológico. Se llama compo-nente conexa por caminos de x ∈ X al mayor conexo por caminos Cx ⊆ Xcon x ∈ Cx.
Lema 4.2.2. Cx existe.
Demostración. Sea C = {C ⊆ X; x ∈ Cy es conexo por caminos}. Lafamilia C 6= ∅ no es vacía pues {x} ∈ C.
Ahora, por la variante anterior, como x ∈⋂
C∈ C
C 6= ∅, entonces x ∈⋃
C∈ C
C = D es conexo por caminos. Además, si C es conexo por caminos
y x ∈ C, por definición se tiene que C ∈ C, luego C ⊆ D y, por tanto,D esel mayor entre todos los conjuntos que contienen a x; es decir Cx = D.
Proposición 4.2.3. Cx coincide con la clase de equivalencia de x re-specto a la relación ”estar conectado por un camino”.
Demostración. Sea Z esa clase de equivalencia; esto es, Z = {y ∈ X;existe un camino en X, entre x e y}. Veamos Z = Cx.Comenzamos probando Cx ⊆ Z. Sea y ∈ Cx, entonces ∃α : [0, 1] → Cx ⊆X con α(0) = x y α(1) = y. Luego, α es un camino en X y, por tanto,y ∈ Z y Cx ⊆ Z.Para ver la otra inclusión sea z ∈ Z, entonces existe un camino α :

CAPÍTULO 4. CONEXIÓN 71
[0, 1] → X con α(0) = x y α(1) = z. Tenemos que A = α([0, 1]) esconexo por caminos por la continuidad de α y la conexión por caminosde [0, 1]. Como x, z ∈ A entonces z ∈ A ⊆ Cx y hemos demostradoZ ⊆ Cx.
Proposición 4.2.4. (Propiedades de componentes conexas por caminos)Sea (X, T ) un espacio topológico. Se cumplen:
1. x ∈ Cx.
2. Cx es conexo por caminos.
3. Cx es la clase de x por la relación “estar conectado por un caminoen (X, T )".
4. Cx ∩ Cy 6= ∅ ⇒ Cx = Cy. Es decir, las componentes conexas porcaminos forman una partición de X.
Definición 4.2.5. Un espacio topológico (X, T ) se dice localmente conexopor caminos si dado x ∈ X y cualquier entorno de N de x, existe otroentorno N ′ de x con N ′ ⊆ N y N ′ es conexo por caminos.
Proposición 4.2.6. Si (X, T ) es localmente conexo por caminos, la com-ponente conexa por caminos (Cx) es abierto y cerrado ∀x ∈ X.
Demostración. Probemos que es abierto.Sea y ∈ Cx ⇒ y ∈ Cy ∩ Cx ⇒ Cx = Cy. Sea N = X, por hipótesis existeN ′ ⊆ X entorno de y con N ′ conexo por caminos. En particular y ∈intN ′ ⊆ N ′ ⇒ y ∈ N ′. Como N ′ es conexo por caminos, necesariamenteN ′ ⊆ Cy ⇒ y ∈ intN ′ ⊆ intCy = intCx. Luego, y ∈ intCx ⇒ Cx ⊆intCx ⇒ Cx = intCx ⇒ Cx es abierto.Veamos que Cx es cerrado.Sea y ∈ Cx entonces para el entorno N ′ anterior y ∈ intN ′ ⇒ (intN ′) ∩Cx 6= ∅ ⇒ N ′ ∩ Cx 6= ∅ ⇒ Cx ∪N ′ es conexo por caminos.Además, Cx ⊆ Cx ∪N ′ y por definición de componente Cx = Cx ∪N ′ ⇒N ′ ⊆ Cx ⇒ y ∈ Cx luego, Cx ⊆ Cx ⇒ Cx = Cx ⇒ Cx es cerrado.
Proposición 4.2.7. (Invarianza del número de componentes conexas porcaminos)Sea f : (X, T ) → (Y, T ′) un homeomorfismo. Si Cx es la componenteconexa por caminos de x, entonces f(Cx) lo es de f(x).
Consecuencia: f induce una biyección entre las familias de componentesconexas por caminos de (X, T ) y de (Y, T ′).

CAPÍTULO 4. CONEXIÓN 72
Demostración. Como f es continua, entonces f(Cx) es conexo por caminosy f(x) ∈ f(Cx). Si Df(x) es la componente de f(x) en (Y, T ′) se tiene quef(Cx) ⊆ Df(x). Como f−1 es continua, entonces f−1(Df(x)) es tambiénconexo por caminos y x = f−1(f(x)) ∈ f−1(Df(x)). Luego, por definiciónde componente conexa por caminos f−1(Df(x)) ⊆ Cx ⇒ Df(x) ⊆ f(Cx)y, por tanto, f(Cx) = Df(x).
Demostración. (Consecuencia)Sea CompX y CompY las familias de componentes conexas por caminosde (X, T ) e (Y, T ′), respectivamente. Definimos
ψ : CompX −→ CompY
Cx 7−→ f(Cx) = Df(x)
ψ es biyectiva con inversa
ψ−1 : CompY −→ CompX
Dy 7−→ f−1(Dy) = Cf−1(y)
En efecto, se tiene:
ψ−1 ◦ ψ(Cx) = ψ−1(Df(x)) = f−1(Df(x)) = Cf−1(f(x))
ψ ◦ ψ−1(Dy) = ψ(f−1(Dy)) = ψ(Cf−1(y)) = f(Cf−1(y)) = Df(f−1(y)) = Dy
Ejemplo 4.2.8. Veamos algunos ejemplos:
1. Los espacios euclídeos (Rn,euclídea) son conexos por caminos ylocalmente conexos por caminos.(Rn,euclídea) viene del espacio normado (Rn, ‖ · ‖euclidea) y losespacios normados son todos conexos por caminos.Otra forma de razonarlo sería:(Rn, euclídea) = (Rn, δeuclidea
n = producto n veces de (R,euclídea)que es conexo por caminos.
Un cubo (= producto de intervalos) es conexo por caminos y en-torno de su centro x (arbitrariamente pequeño) en (Rn,euclídea).Entonces (Rn,euclídea) es localmente conexo por caminos.
2. S1 en el plano euclídeo es conexo y localmente conexo por caminos.Análogamente el disco unidad.
3. Un espacio conexo por caminos que no es localmente conexo porcaminos es el siguiente subespacio del plano euclídeo.

CAPÍTULO 4. CONEXIÓN 73
Figura 4.8:
Figura 4.9:
X = (OY ) ∪ (OX)∞⋃
n=1
An, An = {(x, y); x = 1n}.
OX,OY,An son conexos por caminos y An∩OX 6= ∅ y OX∩OY 6=∅. Luego, X es conexo por caminos. Para ver que no es localmenteconexo por camimos, suponemos por R.A. que sí lo es. Entoncesdado Sea p = (0, y) ∈ OY con y 6= 0. Tomamos Bd(p, r) conr < d(p, OX), d = euclídea|X y N ⊆ Bd(p, r) entorno conexopor caminos de p.
Como N es entorno de p, existe δ > 0 tal que Bd(p, δ) ⊆ N . Ademásp = lım pn con pn ∈ Zn y existe n0 con pn ∈ Bd(p, δ) ⊆ N si n ≥ n0.Sea t con 1
n0+1< t < 1
n0. Entonces, no podemos encontrar un
camino de pn0a pn0+1 dentro de N , lo que es una contradicción.
4. El siguiente subespacio del plano euclídeo no es conexo por caminos(pero tiene la propiedad de que los únicos conjuntos abiertos ycerrados simultáneamente son el espacio total y el conjunto vacío).
Sea X = (∞⋃
n=0
An) ∪ (∞⋃
n=1
Bn) donde A0 = OY , y ∀n ≥ 1

CAPÍTULO 4. CONEXIÓN 74
Figura 4.10:
Figura 4.11:
An = {(x, y) : x = 1n} y Bn = {(x, y) : y = n; 1
n+1≤ x ≤ 1
n}.
Consideramos (X, euclídea).
Cada Hi = Ai ∪ Bi ∪ Ai+1 ∀i ≥ 1 es unión de tres conexos (por loque Hi es conexo) y uno corta a los otros dos. Entonces se tiene:
H1 ∩H2 = A2 ⇒ H1 ∪H2 es conexo.(H1 ∩H2) ∪H3 = A3 ⇒ H1 ∪H2 ∪H3 es conexo.
...
Por tanto, H =∞⋃
1
Hn es conexo por caminos. Sin embargo, X no
es conexo por caminos.R.A: supongamos ∃α : ([0, 1], euclídea) → (X, euclídea) tal queα(0) = p ∈ H y α(1) = q ∈ A0.
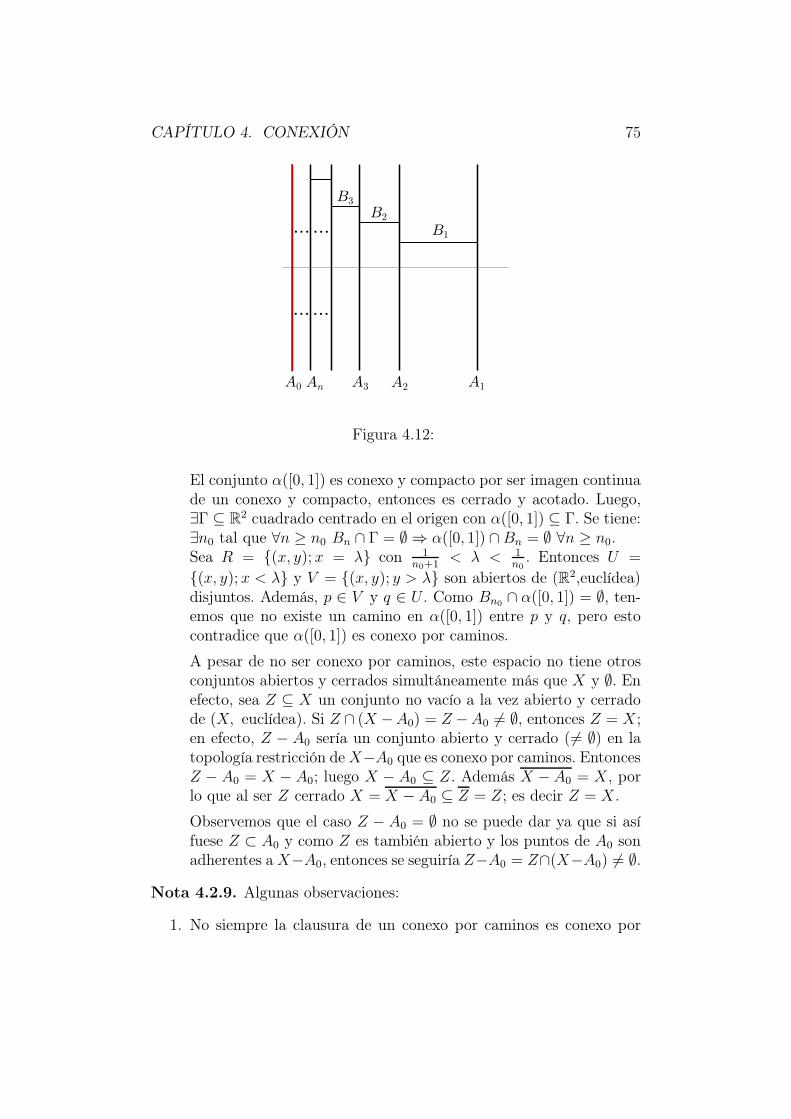
CAPÍTULO 4. CONEXIÓN 75
Figura 4.12:
El conjunto α([0, 1]) es conexo y compacto por ser imagen continuade un conexo y compacto, entonces es cerrado y acotado. Luego,∃Γ ⊆ R2 cuadrado centrado en el origen con α([0, 1]) ⊆ Γ. Se tiene:∃n0 tal que ∀n ≥ n0 Bn ∩ Γ = ∅ ⇒ α([0, 1]) ∩Bn = ∅ ∀n ≥ n0.Sea R = {(x, y); x = λ} con 1
n0+1< λ < 1
n0. Entonces U =
{(x, y); x < λ} y V = {(x, y); y > λ} son abiertos de (R2,euclídea)disjuntos. Además, p ∈ V y q ∈ U . Como Bn0
∩ α([0, 1]) = ∅, ten-emos que no existe un camino en α([0, 1]) entre p y q, pero estocontradice que α([0, 1]) es conexo por caminos.
A pesar de no ser conexo por caminos, este espacio no tiene otrosconjuntos abiertos y cerrados simultáneamente más que X y ∅. Enefecto, sea Z ⊆ X un conjunto no vacío a la vez abierto y cerradode (X, euclídea). Si Z ∩ (X −A0) = Z −A0 6= ∅, entonces Z = X;en efecto, Z − A0 sería un conjunto abierto y cerrado ( 6= ∅) en latopología restricción deX−A0 que es conexo por caminos. EntoncesZ − A0 = X − A0; luego X − A0 ⊆ Z. Además X − A0 = X, porlo que al ser Z cerrado X = X − A0 ⊆ Z = Z; es decir Z = X.
Observemos que el caso Z − A0 = ∅ no se puede dar ya que si asífuese Z ⊂ A0 y como Z es también abierto y los puntos de A0 sonadherentes aX−A0, entonces se seguiría Z−A0 = Z∩(X−A0) 6= ∅.
Nota 4.2.9. Algunas observaciones:
1. No siempre la clausura de un conexo por caminos es conexo por

CAPÍTULO 4. CONEXIÓN 76
caminos. En efecto, en el ejercicio anterior H es conexo por caminospero X = H no lo es.
2. No siempre las componentes conexas por caminos son cerradas.Enel ejemplo anterior X tiene dos componentes conexas por caminosH y A0 donde A0 es cerrada pero H no, pues H = X 6= H .
4.3. Puntos de Corte
Definición 4.3.1. Sea (X, T ) un espacio topológico. Un punto x ∈ X sedice un punto de corte de (X, T ) si X − {x} no es conexo por caminos.Al número de componentes conexas por caminos de X − {x} se le llamaorden de corte de x.
Ejemplo 4.3.2. Veamos algunos ejemplos:
1. En (R2, euclídea) ningún x ∈ R2 es punto de corte.
2. En ([0, 1],euclídea), ∀x ∈ (a, b) x es punto de corte de [a, b] de orden2 mientras que a y b no son de corte.
3. En (S1,euclídea) ningún x ∈ S1 es de corte.
4. En (R,euclídea) todo punto x ∈ R es de corte de orden 2.

CAPÍTULO 4. CONEXIÓN 77
Definición 4.3.3. Sea (X, T ) un espacio topológico. Un punto x ∈ X sedice un punto de corte local de orden n de (X, T ) si para todo entorno Nde x existe otro N ′ ⊆ N tal que N ′ − {x} tiene n componentes conexaspor caminos.
Ejemplo 4.3.4. Observemos el dibujo:
y es punto de corte local de orden 3 pero no es de corte.z es punto de corte local de orden 4 pero no es de corte.x es punto de corte local de orden 2 pero no es de corte.
Proposición 4.3.5. (Invarianza de los puntos de corte)Sea f : (X, T ) → (Y, T ′) un homeomorfismo:a) x es punto de corte de orden n de (X, T ) si y sólo si f(x) lo es de(Y, T ′).b) x es punto de corte local de orden n de (X, T ) si y sólo si f(x) lo esde (Y, T ′).
Demostración. a) Si f es homeomorfismo lo es su restricción sobre la
imagen f : (X −{x}, T /X−{x}) → (Y −{f(x)}, T ′/Y −{f(x)}) con inversa,la restricción sobre la imagen de f−1
f−1 = (Y − {f(x)}, T ′/Y −{f(x)}) → (X − {x}, T /X−{x})
De aquí obtenemos que el número de componentes conexas por caminosde X − {x} coincide con el de Y − {f(x)}.b) Si N es un entorno de f(x) entonces x ∈ f−1(intN) ⊆ f−1(N) dondef−1(intN) es abierto por la continuidad de f y por tanto f−1(N) esentorno de x en (X, T ). Por hipótesis existe W ′ entorno de x con W ′ ⊆f−1(N) y tal que W ′ − {x} tiene n componentes conexas por caminos.Entonces la restricción de f
f : (W ′ − {x}, T |W ′−{x}) → (f(W ′) − {f(x)}, T |f(W ′)−{f(x)})
CAPÍTULO 4. CONEXIÓN 78
es un homeomorfismo y así f(W ′)−{f(x)} tiene n componentes conexaspor caminos. Sólo queda comprobar que f(W ′) es entorno de f(x) puesobviamente f(W ′) ⊆ N . En efecto, como f es homeomorfismo f es abier-ta y así f(intW ′) es abierto. Como f(x) ∈ f(intW ′) ⊆ f(W ′) se sigueque f(W ′) es entorno de f(x).
4.4. La conexión topológica. Definición y primeras
propiedades
Recordemos que la recta eucídea y todos los espacios conexos porcaminos tienen la propiedad de que la familia de los conjuntos abiertosy cerrados a la vez en cualquiera de ellos se reduce al espacio total yel conjunto vacío. Por tanto, esta propiedad generaliza la conexión porcaminos y vamos ahora a estudiarla con más detalle en esta sección.Comenzamos probando que es equivalente a la siguiente propiedad quellamaremos conexión topológica.
Definición 4.4.1. Un espacio topológico (X, T ) se dice disconexo siexisten dos abiertos U y V de (X, T ), distintos del vacío tales que U∩V =∅ y X = U ∪ V . En caso contrario se dirá que es topológicamente conexoo, por abreviar, conexo.En general, un subconjunto A ⊆ X se dice conexo en (X, T ) si (A, T /A)es conexo.
Proposición 4.4.2. Un espacio topológico (X, T ) es conexo si y sólo silos únicos conjuntos que son abiertos y cerrados a la vez son ∅ y X.
Demostración. Supongamos que existe un conjunto A 6= ∅, X, que esabierto y cerrado. Entonces X − A no es ni el vacío ni el total pero esabierto y cerrado. Se tiene entonces X = (X − A) ∩ A con A y X − Aabiertos distintos del vacío y (X−A)∩A = ∅. Luego (X, T ) es disconexo,llegando así a una contradicción.Recíprocamente, si (X, T ) es disconexo, entonces X = U ∪ V con U y Vabiertos distintos del vacío y U∩V = ∅. Luego U = X−V que es cerrado.Por tanto, U es abierto y cerrado, U 6= ∅ y U 6= X pues V = X −U 6= ∅.Por tanto, (X, T ) es conexo.
Ejemplo 4.4.3. (R, discreta) no es conexo.∀x ∈ R, {x} = Bd(x, 1) es abierto. R − {x} =
⋃y 6=x{y} es abierto. Por
tanto {x} también es cerrado.

CAPÍTULO 4. CONEXIÓN 79
La Proposición 4.4.2 nos permite rescribir la Proposición 4.1.5 comosigue. De esta manera se caracterizan los conjuntos conexos de la rectaeuclídea además de establecerse que en ella la conexión es equivalente ala conexión por caminos.
Proposición 4.4.4. (Caracterización de los conexos de la recta euclídea)En (R,euclídea) las siguientes propiedades son equivalentes para un con-junto A ⊆ R.
1. A es conexo por caminos.
2. A es conexo.
3. Si a ≤ b con a, b ∈ A, entonces [a, b] ⊆ A.
4. A es un intervalo.
En general, la Proposición 4.1.4 muestra que la conexión topológicageneraliza a la conexión por caminos. Ambas propiedades no son equiv-alentes como se observa a continuación.
Ejemplo 4.4.5. El espacio en el Ejemplo 4.2.8(4) es conexo pero noconexo por caminos. Todos los detalles se encuentran en 4.2.8(4).
Veamos una condición suficiente para que un espacio conexo seaconexo por caminos.
Proposición 4.4.6. Sea (X, T ) localmente conexo por caminos. En-tonces (X, T ) es conexo si y sólo si (X, T ) es conexo por caminos.
Demostración. Sea x0 ∈ X. Por la proposición anterior Cx0es abierto y
cerrado, entonces Cx0= X. Pero Cx0
= {y ∈ X : y se conecta por uncamino en X con x0}, luego todo x ∈ X se conecta por un camino conx0 y utilizando la transitividad ∀x, x′ ∈ X, x y x′ están conectados porun camino en X. Por tanto, (X, T ) es conexo por caminos. El recíprocoes general (4.1.4)
Proposición 4.4.7. Sea f : (X, T ) → (Y, T ′) continua y A ⊆ X conexo.Entonces f(A) es conexo. En particular, si f es homeomorfismo y (X, T )es conexo, entonces (Y, T ′) también.
Demostración. Por definición (A, T /A) es conexo. Como f es continua,
entonces la restricción sobre la imagen f : (A, T /A) → (f(A), T ′/f(A)),
f(a) = f(a) ∀a ∈ A también es continua.

CAPÍTULO 4. CONEXIÓN 80
Sea Z ⊆ f(A) abierto y cerrado de (f(A), T ′/f(A)). Basta probar queZ = ∅ ó Z = f(A) para concluir que f(A) es conexo.
Por ser f continua, f−1(Z) es abierto y cerrado de (A, T /A) y como
A es conexo entonces f−1(Z) = A ó f−1(Z) = ∅. De esta forma, si
f−1(Z) = A⇒ f(A) = f(A) = Z y si f−1(Z) = ∅ ⇒ Z = ∅.
Proposición 4.4.8. Sea (X, T ) un espacio topológico y A ⊆ X conexo,entonces todo B ⊆ X tal que A ⊆ B ⊆ A es conexo. En particular A essiempre conexo.
Demostración. R.A. Supongamos que B no es conexo. Entonces existendos abiertos U y V de (B, T /B) con U 6= ∅, V 6= ∅ con U ∩ V = ∅ yB = U ∪ V .Como U y V son abiertos relativos, existen H y G abiertos de (X, T )con U = B ∩G y V = B ∩H . En particular, U ′ = A ∩G y V ′ = A ∩Hson abiertos de (A, T /A) y además
U ′ ∪ V ′ = (G∪H)∩A = [(G∪H ∩B)]∩A = [U ∪ V ]∩A = B ∩A = A
U ′ ∩ V ′ = (G ∩H) ∩ A = (G ∩H) ∩ B ∩ A = (U ∩ V ) ∩A = ∅
Pero A es conexo, luego U ′ = ∅ y V ′ = A ó V ′ = ∅ y U ′ = A. ComoU = G ∩ B 6= ∅ entonces existe b ∈ B con b ∈ G. Como G es abierto yb ∈ B ⊆ A entonces G ∩ A 6= ∅ y por tanto U ′ 6= ∅.De igual forma V 6= ∅, entonces V ′ 6= ∅ llegando así a una contradicciónpues o bien U ′ o V ′ debe ser vacío.
4.5. Otras caracterizaciones y propiedades de
los espacios conexos
Comenzamos observando que la Proposición 4.4.2 permite demostrarque la conexión de un espacio es equivalente a que toda aplicación de eseespacio en la recta euclídea cumpla el Teorema del Valor Intermedio deBolzano en la Proposición 2.8.3. Esto es,
Proposición 4.5.1. Sea (X, T ) un espacio topológico. Son equivalentesa) (X, T ) es conexo.b) Si f : (X, T ) → (R, euclídea) y a, b ∈ f(X) con a ≤ b entonces[a, b] ⊆ f(X)c)(Teorema de Bolzano) Si f : (X, T ) → (R, euclídea) es continua y∃x1, x2 ∈ X con f(x1) < 0 y f(x2) > 0, entonces ∃x0 ∈ X con f(x0) = 0.

CAPÍTULO 4. CONEXIÓN 81
Definición 4.5.2. Un espacio topológico (X, T ) se dice discreto si todoslos conjuntos unitarios {x} son abiertos.
Ejemplo 4.5.3. Si d es la distancia discreta (X, d) es un espacio discretoya que, Bd(x, 1) = {x} es abierto.
Proposición 4.5.4. Sea (X, T ) espacio topológico discreto. EntoncesA ⊆ X es conexo si y sólo si A = {x} tiene un sólo elemento.
Demostración. Si A = {x} entonces es obvio que A es conexo. Recíproca-mente, si A contiene a x e y (x 6= y); consideramos A = {x}∪ (A−{x}),donde {x} y A−{x} = ∪a∈Ax
{a} son abierto y entonces A es disconexo.Por tanto, concluimos que A sólo tiene un elemento.
Proposición 4.5.5. Sea (X, T ) cualquier espacio topológico. Son equiv-alentes:a) (X, T ) es conexo.b) Toda f : (X, T ) → (Y, T ′) continua con (Y, T ′) discreto es constante.
Demostración. a) ⇒ b)Como (X, T ) es conexo y f es continua, entonces f(X) es conexo en(Y, T ′). Por la proposición anterior f(X) se reduce a un elemento. Luego,f es constante.
b) ⇒ a)R.A. Supongamos que (X, T ) no es conexo. Entonces existen A y Babiertos tales que X = A ∪B y A ∩ B = ∅.Sea Y = {y0, y1} y T ′ = {∅, Y, {y0}, {y1}}. Es claro que (Y, T ′) es unespacio discreto. Definimos f : (X, T ) → (Y, T ′) como
f(x) =
{y0 si x ∈ Ay1 si x ∈ B
Es inmediato comprobar f continua es continua ya que: f−1(∅) = ∅,f−1(Y ) = X, f−1({y0}) = A, f−1({y1}) = B. Se llega así a una con-tradicción pues f no es constante. Entonces, (X, T ) es necesariamenteconexo.
Proposición 4.5.6. Sea (X, T ) cualquier espacio topológico. Son equiv-alentes:a) (X, T ) es conexo.b) Dados a, b ∈ X, ∃C ⊆ X conexo tal que a, b ∈ C.

CAPÍTULO 4. CONEXIÓN 82
Demostración. a) ⇒ b) es trivial tomando C = X.
b) ⇒ a)R.A. Supongamos que (X, T ) no es conexo. Entonces existen U y Vabiertos tales que X = U ∪ V y U ∩ V = ∅. Como U, V 6= ∅, sean a ∈ Uy b ∈ V . Por b) se tiene ∃C ⊆ X con a, b ∈ C.Como C ⊆ X. Entonces C = U ′∪V ′ donde U ′ = C ∩U y V ′ = C ∩V . Secumple que U ′ ∩ V ′ ⊆ U ∩ V = ∅, luego U ′ ∩ V ′ = ∅ y U ′, V ′ 6= ∅. ComoU ′ y V ′ son abiertos de (C, TC) se sigue que C no es conexo, lo que esuna contradicción.
Proposición 4.5.7. Sea (X, T ) un espacio topológico. Sea {Cα}α∈Λ conCα ⊆ X conexo ∀α ∈ Λ. Supongamos que existe α0 con Cα ∩ Cα0
6= ∅∀α ∈ Λ (*). Entonces C =
⋃
α∈Λ
Cα es conexo.
Figura 4.13:
Demostración. Sea f : (C, T /C) → (Y, T ′) continua con (Y, T ′) discreto.Para ver que C es conexo basta ver que f es constante.Para cada α, f |Cα
es constante por ser Cα conexo. Por tanto, ∀x ∈ Cα
f(x) = yα ∈ Y .Como Cα ∩ Cα0
6= ∅ si
x0 ∈ Cα ∩ Cα0⇒
{x ∈ Cα ⇒ f(x) = yα
x ∈ Cα0⇒ f(x) = yα0
Entonces yα = yα0∀α, luego f es constante.
Las dos proposiciones siguientes tienen demostraciones análogas a lasde sus correspondientes contrapartes en conexión por caminos 4.1.11 y4.1.12.

CAPÍTULO 4. CONEXIÓN 83
Proposición 4.5.8. (Variante 1) Supongamos que en vez de (∗) en 4.5.7
se tiene Cα ∩ Cα′ 6= ∅ ∀α, α′; en particular si⋂
α∈Λ
Cα 6= ∅. Entonces C
sigue siendo conexo.
Proposición 4.5.9. (Variante 2) Sean C1, C2, ..., Cn una sucesión desubconjuntos conexos en un espacio topológico (X, T ) con Ci ∩ Ci+1 6= ∅
∀i ≥ 1. Entonces C =
∞⋃
n=1
Cn es conexo.
Pasamos a estudiar la conexión del producto de espacios (seudo)métricos.
Proposición 4.5.10. Sean (X1, d1) y (X2, d2) espacios (seudo)métricosconexos. Entonces (X1 ×X2, δ
max2 ) con
δmax2 ((x1, x2)(x
′1, x
′2)) = max{d1(x1, x
′1), d2(x2, x
′2)}
es conexo.
Demostración. Sean (x01, x
02),(x
11, x
12) ∈ X1 ×X2.
Figura 4.14:
La aplicación ϕ1 : (X2, d2) → (X1 × X2, δmax2 ) dada por ϕ1(x2) =
(x01, x2). ϕ es isometría por tanto, continua. En efecto:
δmax2 (ϕ1(x2)ϕ1(y2)) = max{d1(x
01, x
01), d2(x2, y2)} = d2(x2, y2).
En particular, ϕ1(X2) = {x01} ×X2 es conexo.
Análogamente, ϕ2 : (X1, d1) → (X1 × X2, δmax2 ) dada por ϕ2(x1) =
(x1, x12) es una isometría y ϕ2(X1) = X1 × {x1
2} es conexo. Por últi-mo, ϕ1(X2)∩ϕ2(X1) = {(x0
1, x12)} 6= ∅, luego, ϕ1(X2)∪ϕ2(X1) es conexo
y contiene a (x01, x
02) y (x1
1, x12). Entonces (X1 ×X2, δ
max2 ) es conexo por
4.5.6.

CAPÍTULO 4. CONEXIÓN 84
Nota 4.5.11. La proposición anterior es válida también para las (seu-do)distancias δtaxi
2 y δeuclidea2 . De hecho, todo lo indicado en 4.1.8 per-
manence válido si cambiamos la conexión por caminos por la conexióntopológica.
4.6. Componentes conexas. Conexión local
Definición 4.6.1. Dado (X, T ) un espacio topológico y x ∈ X llamamoscomponente conexa de X al mayor conjunto conexo Cx ⊆ X que contienea x.
Lema 4.6.2. Cx siempre existe.
Demostración. En efecto, sea C = {C ⊆ X;C es conexo y x ∈ C}.La familia C 6= ∅ no es vacía pues {x} es conexo y x ∈ {x}. La unión
C0 =⋃
C∈ C
C es un conjunto conexo pues cada C es conexo y si C, C ′ ∈ C
x ∈ C ∩ C ′, y como x ∈ C0 se tiene C0 ∈ C. Pero ∀C ∈ C, C ⊆ C0 pordefinición. Esto es, C0 es el mayor conexo en (X, T ) que contiene a x.Así, Cx = C0
Ejemplo 4.6.3. En (Q,euclídea) la componente conexa de cada x ∈ Qes {x}.
Nota 4.6.4. Si (X, T ) es conexo Cx = X ∀x ∈ X.
Proposición 4.6.5. (Propiedades básicas de las componentes conexas)Sea (X, T ) un espacio topológico. Si Cx es la componente conexa de x ∈X, se cumplen:
1. x ∈ Cx
2. Cx es conexo.
3. Cx es cerrado en (X, T ).
4. Si Cx ∩ Cy 6= ∅ ⇒ Cx = Cy. Es decir, las componentes conexasforman una partición de X.
Demostración. Los apartados 1) y 2) se tienen por definición.3) Cx es conexo, entonces Cx es conexo. Además, x ∈ Cx, luego x ∈ Cx
ya que Cx ⊆ Cx siempre.

CAPÍTULO 4. CONEXIÓN 85
Por ser Cx el mayor conexo conteniendo a x, se tiene Cx ⊆ Cx, por tanto,Cx = Cx y se deduce que Cx es cerrado.4) Como Cx∩Cy 6= ∅ y Cx y Cy son conexos, entonces Cx∪Cy es conexo.Además,
x ∈ Cx ⊆ Cx ∪ Cy ⇒ Cx ∪ Cy ⊆ Cx ⇒ Cy ⊆ Cx.
Análogamente,
y ∈ Cy ⊆ Cx ∪ Cy ⇒ Cx ∪ Cy ⊆ Cy ⇒ Cx ⊆ Cy de donde Cx = Cy.
Ejemplo 4.6.6. Sea A = { 1n, 0}n≥1, X = A× R ⊆ R2.
Entonces en (X,euclídea) la componente conexa de de x = (a, y) cona ∈ A es Cx = {a} × R.
Figura 4.15:
Claramente, {a} × R es conexo, por tanto, {a} × R ⊆ Cx.Si p = (a′, y′) ∈ Cx y p1 : R2 → R es la primera proyección, p1(Cx) esconexo en A ⊆ Q, entonces p1(Cx) = {∗}, ∗ ∈ A. Luego, ∗ = a⇒ a′ = a.Por tanto Cx ⊆ p−1
1 (a) = {a} × R
Definición 4.6.7. Un espacio topológico (X, T ) se dice localmente conexosi dado cualquier x ∈ X y cualquier entorno N de x en (X, T ) entoncesexiste otro entorno N ′ de x que es conexo y N ′ ⊆ N .
Proposición 4.6.8. Si (X, T ) es localmente conexo entonces toda com-ponente Cx es un conjunto abierto (y por tanto abierto y cerrado).

CAPÍTULO 4. CONEXIÓN 86
Demostración. Sea y ∈ Cx. Por hipótesis si N = X (que es entorno dey) existe N ′ ⊆ X conexo y entorno de y. En particular y ∈ intN ′ ⊆ N ′.Además, y ∈ Cy, por tanto, Cy ∩Cx 6= ∅ por lo que Cx = Cy. Por defini-ción de componente conexa se tiene,
N ′ ⊆ Cy = Cx ⇒ y ∈ intN ′ ⊆ intCx.Así, Cx ⊆ intCx ⇒ Cx = intCx ⇒ Cx es abierto.
Ejemplo 4.6.9. Veamos algunos ejemplos:
1. Ya sabemos que los espacios euclídeos son conexos por caminos ylocalmente conexos por caminos. Por tanto lo son también para laconexión topológica.
2. (R, discreta) no es conexo y sí localmente conexo, pues si ε ≤ 1Bd(x, ε) = {x} es conexo. Las componentes conexas son Cx = {x}∀x ∈ R
3. (Q,euclídea) no es conexo y no es localmente conexo pues A ⊆ Qes conexo si y sólo si A = {∗} y por tanto, intA = ∅, luego, dado xno existe ningún entorno de x conexo.
4. En (R2,euclídea) hay conexos que no son localmente conexos.Consideremos el ejemplo 4.2.8(3). Ya sabemos que es conexos porcaminos, luego es conexo. Además la misma demostración en 4.2.8(3)lleva a que no es localmente conexo. La recordamos aquí. El sube-
spacio en cuestión era X ⊆ R2 con X = OX ∪ OY∞⋃
1
Zn con
Zn = {(x, y); x = 1n}.
Para ver que (X, euclídea) no es localmente conexo razonamos porR.A.: Sea Bd(p, r) con r < d(p, OX), d = euclídea|X yN ⊆ Bd(p, r)entorno conexo de p.
Como N es entorno de p, existe δ > 0 tal que Bd(p, δ) ⊆ N . Ademásp = lım pn con pn ∈ Zn y existe n0 con pn ∈ Bd(p, δ) ⊆ N si n ≥ n0.Sea t con 1
n0+1< t < 1
n0. Consideremos:
U = {(x, y), x < t}V = {(x, y), x > t}
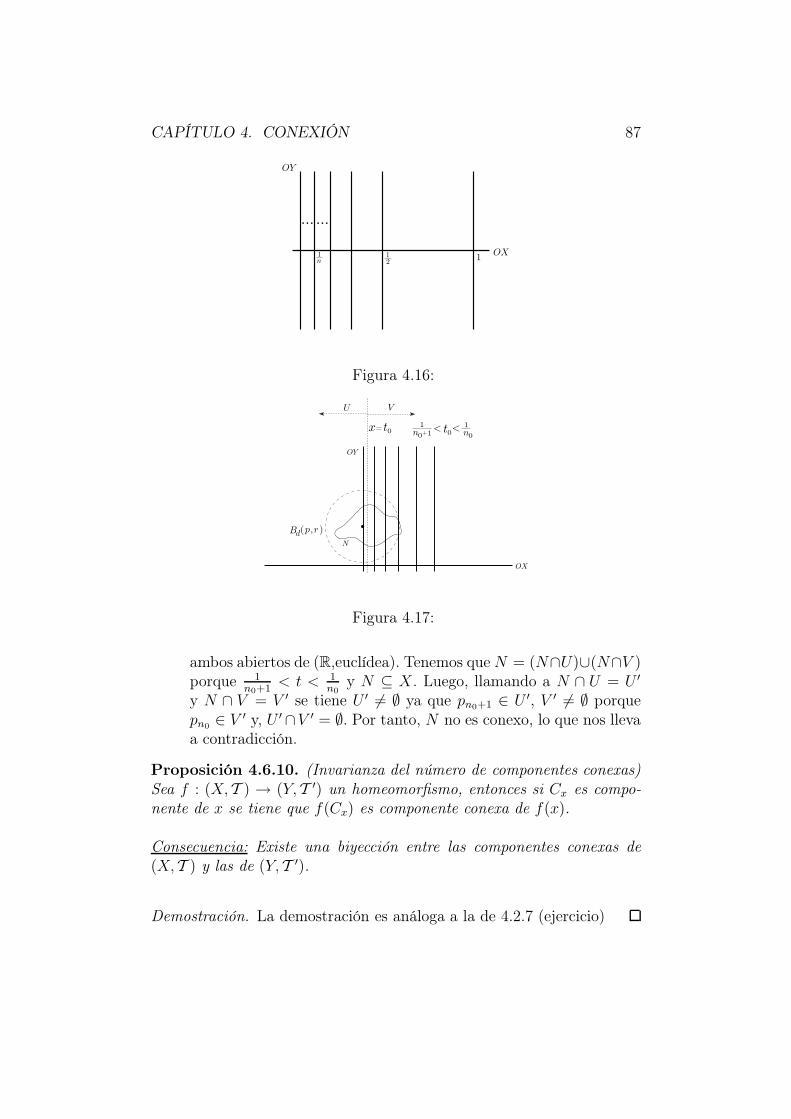
CAPÍTULO 4. CONEXIÓN 87
Figura 4.16:
Figura 4.17:
ambos abiertos de (R,euclídea). Tenemos que N = (N∩U)∪(N∩V )porque 1
n0+1< t < 1
n0y N ⊆ X. Luego, llamando a N ∩ U = U ′
y N ∩ V = V ′ se tiene U ′ 6= ∅ ya que pn0+1 ∈ U ′, V ′ 6= ∅ porquepn0
∈ V ′ y, U ′∩V ′ = ∅. Por tanto, N no es conexo, lo que nos llevaa contradicción.
Proposición 4.6.10. (Invarianza del número de componentes conexas)Sea f : (X, T ) → (Y, T ′) un homeomorfismo, entonces si Cx es compo-nente de x se tiene que f(Cx) es componente conexa de f(x).
Consecuencia: Existe una biyección entre las componentes conexas de(X, T ) y las de (Y, T ′).
Demostración. La demostración es análoga a la de 4.2.7 (ejercicio)


















