
Split Range Control
50
CONTROL DE RANGO DIVIDIDO (Split Range Control) • 20070953
-
Upload
orlando-zacarias-pacheco-huanca -
Category
Documents
-
view
418 -
download
10
Transcript of Split Range Control

CONTROL DE RANGO DIVIDIDO (Split Range Control)
• 20070953
ESTRATEGIAS DE CONTROLINTRODUCCION A LAS ESTRATEGIAS DE CONTROL
En el diario vivir las personas, según sus necesidades, recurren a una u otra estrategia para solucionar un problema o efectuar determinadas labores. En función de esto podemos indicar que para determinadas problemáticas existen estructuras o procedimientos, que teniendo en cuenta los datos iníciales, mediante una determinada distribución de piezas o componentes logra solucionar el problema. A este concepto por lo general se le denomina estrategia. Cuando hablamos de estrategia determinamos una distribución de piezas o componentes, las cuales tienen ciertas tareas que efectuar y en algún orden, para alcanzar nuestro objetivo.

En el mundo de los sistemas de control automático también existe este concepto, en este caso se denomina estrategia de control y está relacionado con la distribución de los dispositivos o equipos bajo los cuales funciona un proceso omáquina. Las estrategias de control determinan la estructura o circuito que sigue la información o señales en el lazo. Dependiendo de la aplicación (entorno de trabajo, máquina) a gobernar se debe definir el actuar de las variables de proceso (nivel, humedad, presión, flujo, temperatura, etc.).
ESTRATEGIAS DE CONTROL Control realimentado Control por actuadores en paralelo Controlador en Cascada Controlador de Relación Controlador de Rango Dividido Controlador Selectivo Controlador Anticipatorio Controlador Adaptativo Controlador Predictivo, Controlador de adelanto de fase Controlador por retardo de fase, Controlador por lógica difusa Controladores lógicos programables Ver Anexo 1

1.1 CONTROL DE GAMA DIVIDIDA
Es un sistema de control en el cual existe una sola variable controlada y dos o más variables manipuladas, que deben tener el mismo efecto sobre la variable controlada. Para realizar éste sistema se requiere compartir la señal de salida del controlador con los varios elementos finales de control.
En este tipo de control un mismo controlador actúa sobre dos o más válvulas de control de tal modo que con la misma señal de salida del controlador de 0 a 100%, las válvulas son actuadas separadamente una de 0 a 50% y la otra de 50 a 100%.

El control de gama partida es una forma de control en el que una variable manipulada tiene preferencia con relación a otra u otras del proceso.
En este caso, la salida de un controlador actúa simultáneamente sobre dos o mas válvulas de control. La salida actúa primero sobre una válvula.Al saturarse esta acción, se pasa a la siguiente. Esta configuración se usa enaquellos diseños de capacidad secuencialmente creciente.
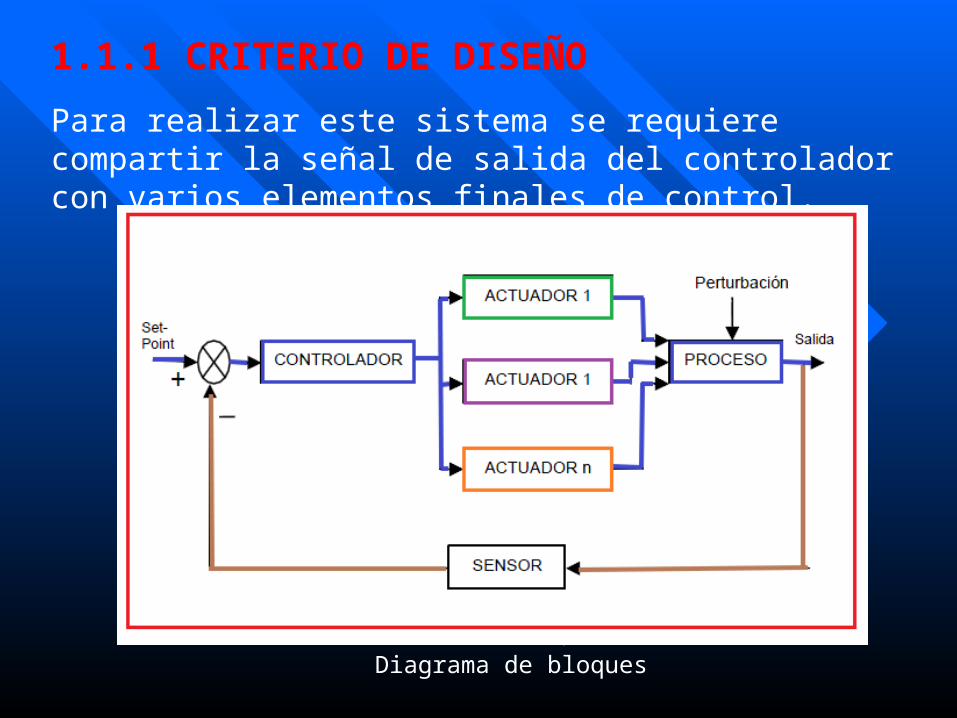
1.1.1 CRITERIO DE DISEÑO
Para realizar este sistema se requiere compartir la señal de salida del controlador con varios elementos finales de control.
Diagrama de bloques


• También denominado control de rango partido. Este tipo de control tiene mayor número de variables manipuladas que controladas.
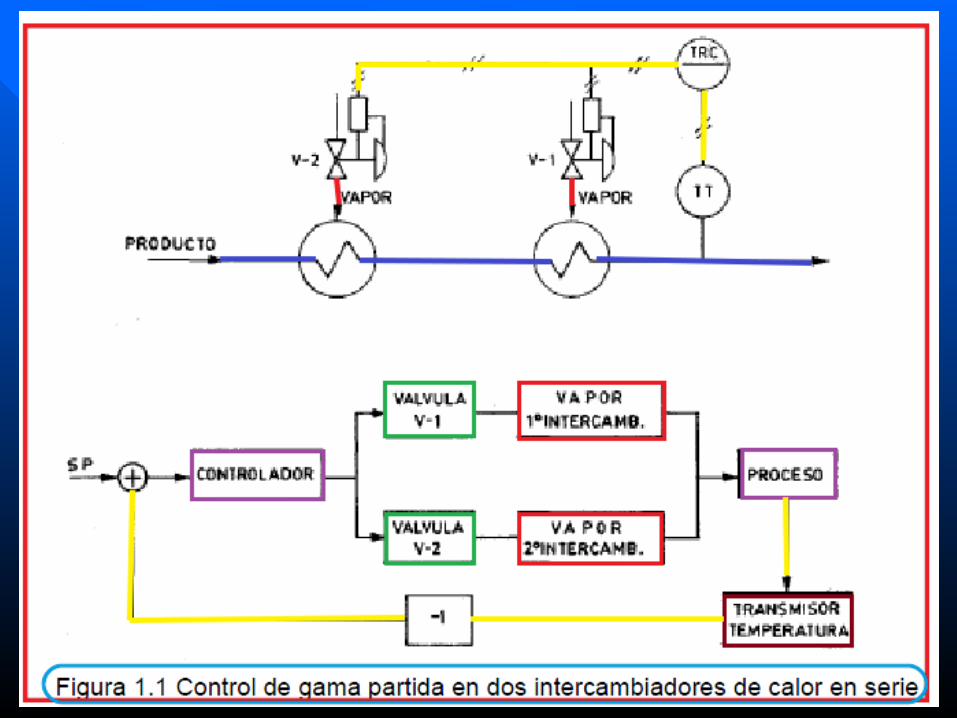
El control de gama partida (split-range control) es una forma de control en el que una variable manipulada tiene preferencia con relación a otra u otras del proceso. En la figura 1.1 puede verse este tipo de control aplicado a dos intercambiadores de calor en serie. La instalación se utiliza para calentar un producto cuyo caudal es muy variable; cuando es bajo basta un solo intercambiador para calentarlo y cuando la fabricación es la máxima son necesarios los dos.
Suponemos que, desde el punto de vista de seguridad, las válvulas deben cerrar en caso de fallo de aire, por lo cual el controlador de temperatura debe ser de acción inversa (al aumentar la temperatura baja la señal de salida). Si el caudal de producto es bajo, actuará la válvula de vapor V -1 porque la señal de salida estará comprendida entre 50-100 % (9-15 psi). A medida que aumenta el caudal, el controlador de temperatura baja la señal gradualmente hasta que, cuando la señal baja de 50 % (9 psi), la válvula V-1 permanece totalmente abierta con el primer intercambiador trabajando al máximo, y la válvula de control V-2 empieza a abrir iniciando el funcionamiento del segundo intercambiador. A un caudal máximo determinado, las dos válvulas de control están abiertas y los dos intercambiadores trabajan al máximo. La partición de la señal se logra usualmente mediante posicionadores acoplados a las válvulas de control que convierten el campo de señal de entrada (O-50 % o 50-100 %) en todo el campo de variación estándar 3-15 psi.

Características:
El control de rango partido, es una técnica que permite mejorar o facilitar el trabajo de controladores convencionales, principalmente en los casos de:
Rango muy amplio de control Extrema no linealidad en la característica estática de
proceso.
Existe una opción para los actuadores mediante la cual se puede regular la relación entre la señal de comando y su rango de operación.

En el ejemplo se desea mantener controlada la presión de una línea de gas producto de la salida de varias calderas.En este caso, se manipulan los flujos de salida de cada una de las calderas simultáneamente para lograr la presión de salida deseada.


Como ejemplos del empleo de este sistema de control tenemos: el control de presión de un reactor, en el cual un solo controlador manipula las válvulas de productos y reactivos, el control de temperatura de un proceso de recubrimiento electrolítico.

1.1.2 EJEMPLOS DE APLICACIÓN
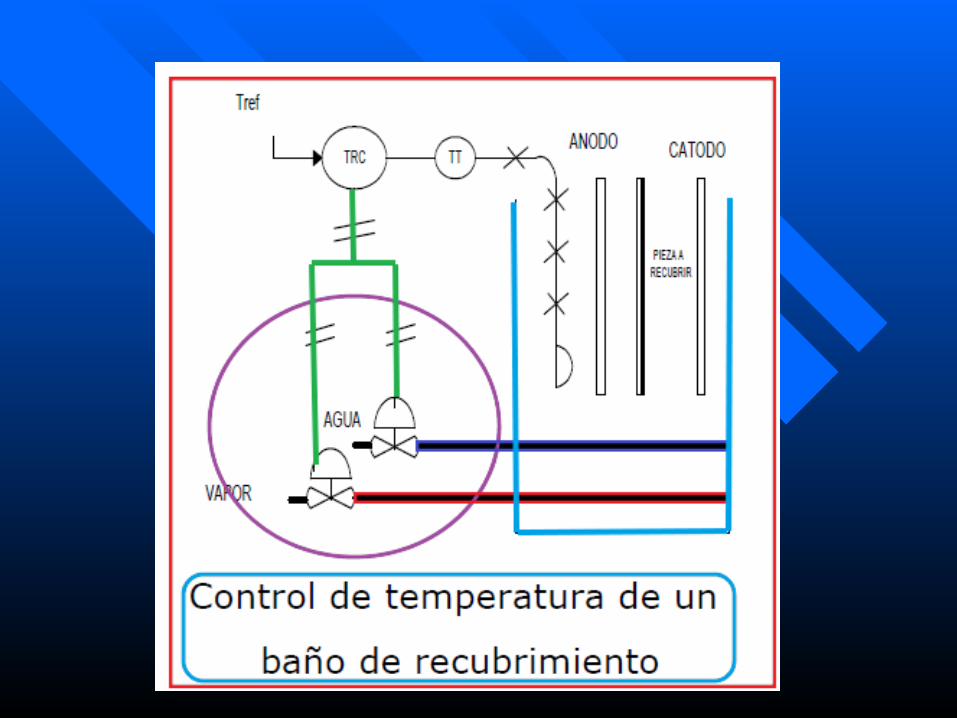
1. Ejemplo: Control de temperatura de un baño electrolítico.
En estos baños el calor producido por el paso de la corriente eléctrica, es removido por un flujo controlado de agua de enfriamiento. Cuando se requiere recubrir piezas de gran tamaño la temperatura del baño desciende, por lo que se emplean serpentines que transportan flujos regulados de vapor para llevarlo hasta su punto de referencia.
Cuando la solución electrolítica está en el punto de referencia, los flujos de agua y de vapor deben ser nulos. Las acciones anteriores deben realizarse con un controlador de gama partida, cuya salida va a los posicionadores de las válvulas de agua y de vapor.


• Las siguientes figuras ilustran el funcionamiento del controlador y las válvulas frente a perturbaciones:
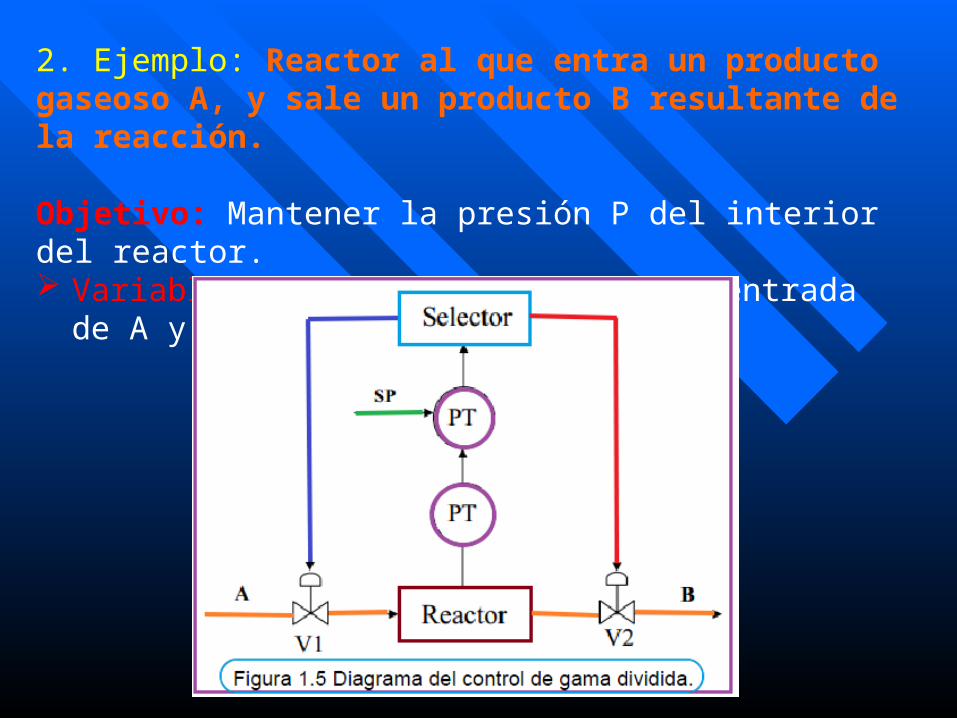
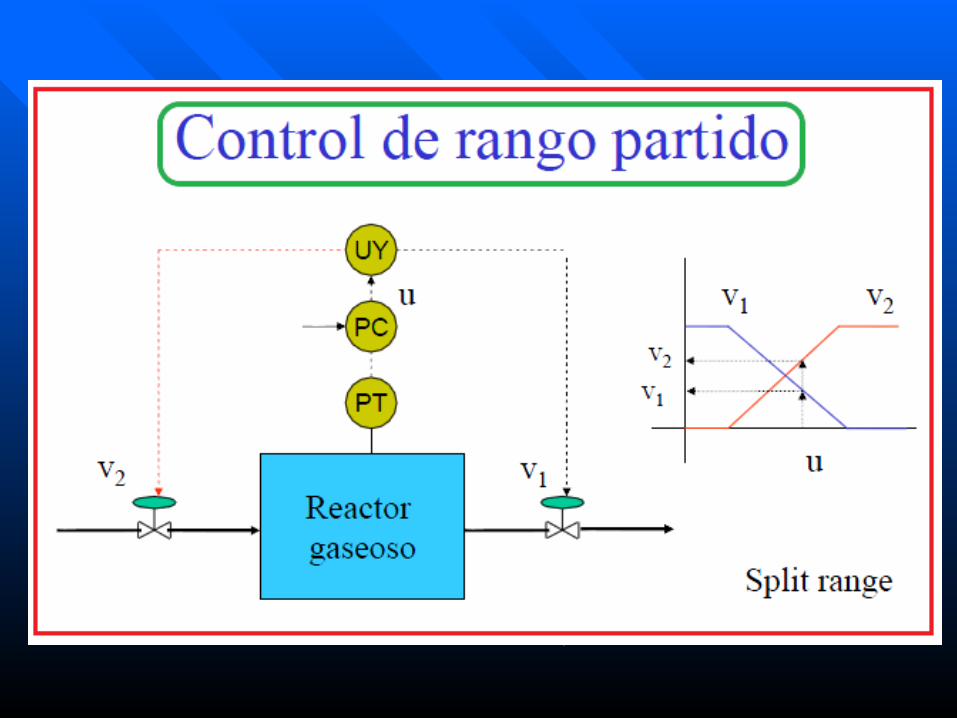
2. Ejemplo: Reactor al que entra un producto gaseoso A, y sale un producto B resultante de la reacción.
Objetivo: Mantener la presión P del interior del reactor. Variables manipuladas: válvula de entrada de A y válvula de
salida de B
3. Ejemplo: Reactor al que entra un producto gaseoso A, y sale un producto B resultante de la reacción.
• La salida del regulador de presión PC va a un selector que se encarga de distribuir la acción de control entre las dos válvulas V1 y V2
• La política a seguir está representada en la gráfica:
A presiones bajas, V1 estará abierta al 100% y V2 cerrada. A altas presiones, V1 estará cerrada y V2 abierta. A presiones intermedias, la abertura de cada válvula se
determina de la gráfica.

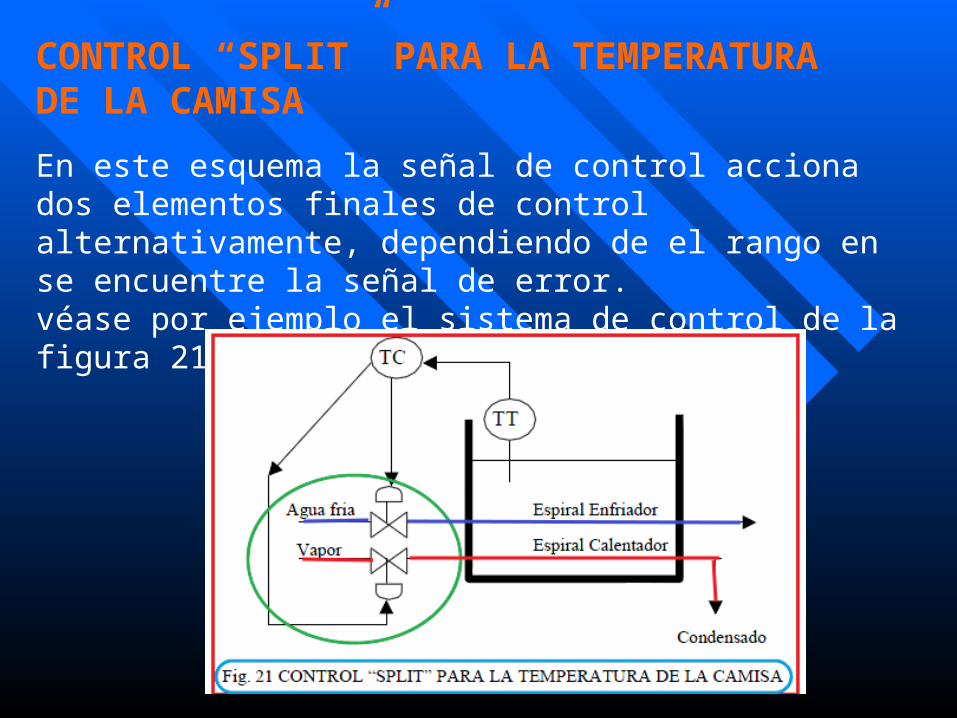
CONTROL “SPLIT” PARA LA TEMPERATURA DE LA CAMISA
En este esquema la señal de control acciona dos elementos finales de control alternativamente, dependiendo de el rango en se encuentre la señal de error. véase por ejemplo el sistema de control de la figura 21.

Asumamos que el controlador TC es sólo de acción proporcional. Su salida se alimenta a dos válvulas. Si se trata de válvulas neumáticas (3 a 15 psi) su acción se calibrará de manera que la válvula de vapor pase de abierta a cerrada según su entrada varía de 3 a 9 psi; y la válvula de agua irá de cerrada a abierta al variar su entrada de 9 a 15 psi. El sistema se diseña para que la salida del controlador produzca 9 psi cuando el error es cero (ambas válvulas cerradas). Al variar la temperatura se abrirá ya sea la válvula para el calentamiento o la del enfriamiento, dependiendo del signo del error.
Un sistema similar al anterior, pero en un esquema de control en cascada se muestra en la figura 22. Igualmente se necesita tanto de calentamiento como de enfriamiento del reactor. Para ello se separa el rango de presión para las válvulas.
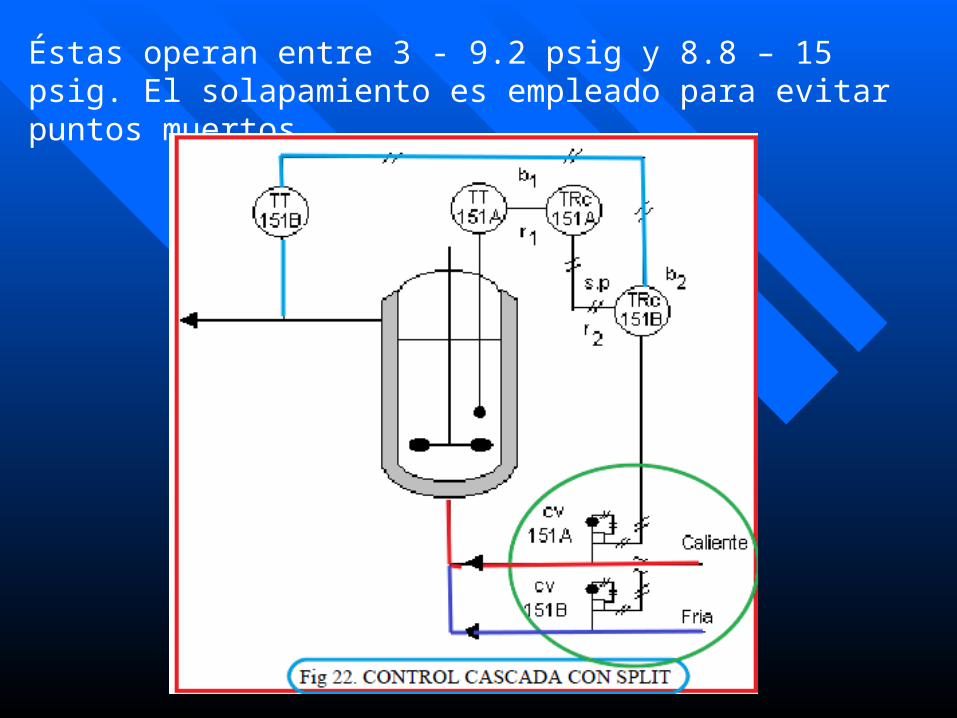
Éstas operan entre 3 - 9.2 psig y 8.8 – 15 psig. El solapamiento es empleado para evitar puntos muertos.

U1 = Perturbaciones en los flujos de entrada (frío o caliente a la camisa). Por ejemplo T,P
U2 = Cambios producidos por generación de calor en las reacciones químicas

Posicionadores:
• Posicionador electroneumático Tipo 3767



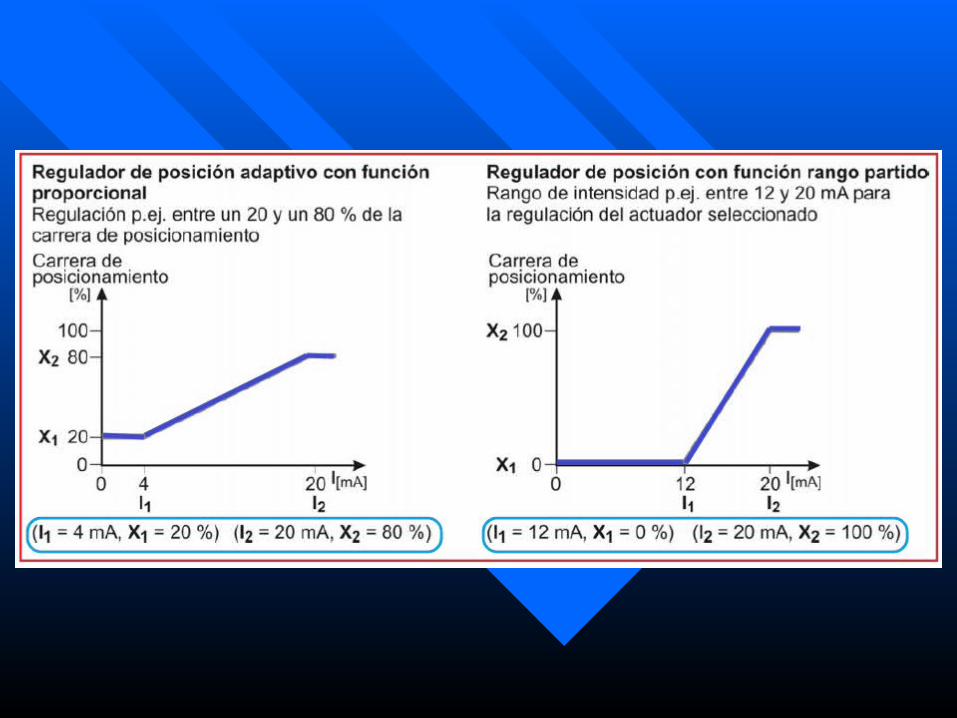
En servicio en rango partido (split-range) (fig. 13, derecha) las válvulas de control trabajan con magnitudes guía mas pequeñas.La señal de regulación se divide para controlar dos válvulas, de forma que cada una de las válvulas recorre su carrera completa con la mitad de la señal de entrada (p.ej. La primera válvula ajustada de 4 a 12 mA y la segunda válvula de 12 a 20 mA). Para evitar solapamiento tener en cuenta una zona muerta de ±0,5 mA como se muestra en la fig. 13. El punto inicial (cero) se ajusta por el tornillo (6.2), y el span y con el el punto final del margen, se ajusta por el tornillo (6.1).

• Posicionador electroneumático y posicionador neumático Tipo 3760
Posicionador de simple efecto, para montaje directo en válvulas de control neumáticas. La magnitud guía es una señal eléctrica normalizada de 4 a 20 mA o una señal neumática de 0,2 a 1 bar (3 a 15 psi).
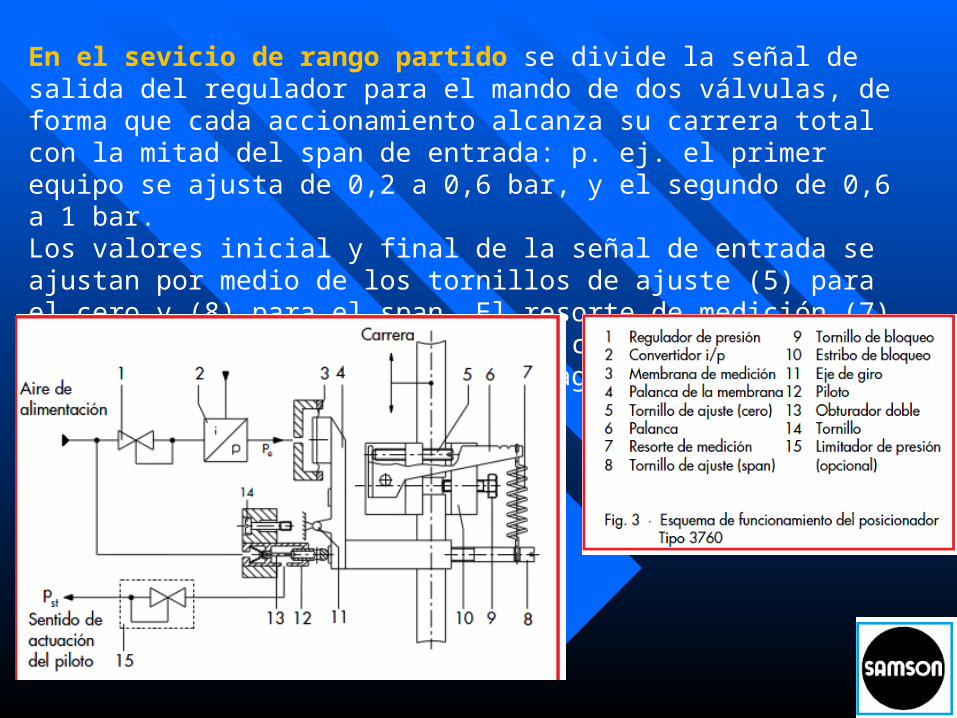
En el sevicio de rango partido se divide la señal de salida del regulador para el mando de dos válvulas, de forma que cada accionamiento alcanza su carrera total con la mitad del span de entrada: p. ej. el primer equipo se ajusta de 0,2 a 0,6 bar, y el segundo de 0,6 a 1 bar.Los valores inicial y final de la señal de entrada se ajustan por medio de los tornillos de ajuste (5) para el cero y (8) para el span. El resorte de medición (7) deberá elegirse de acuerdo con la carrera nominal de la válvula y el span nominal de la magnitud guía.


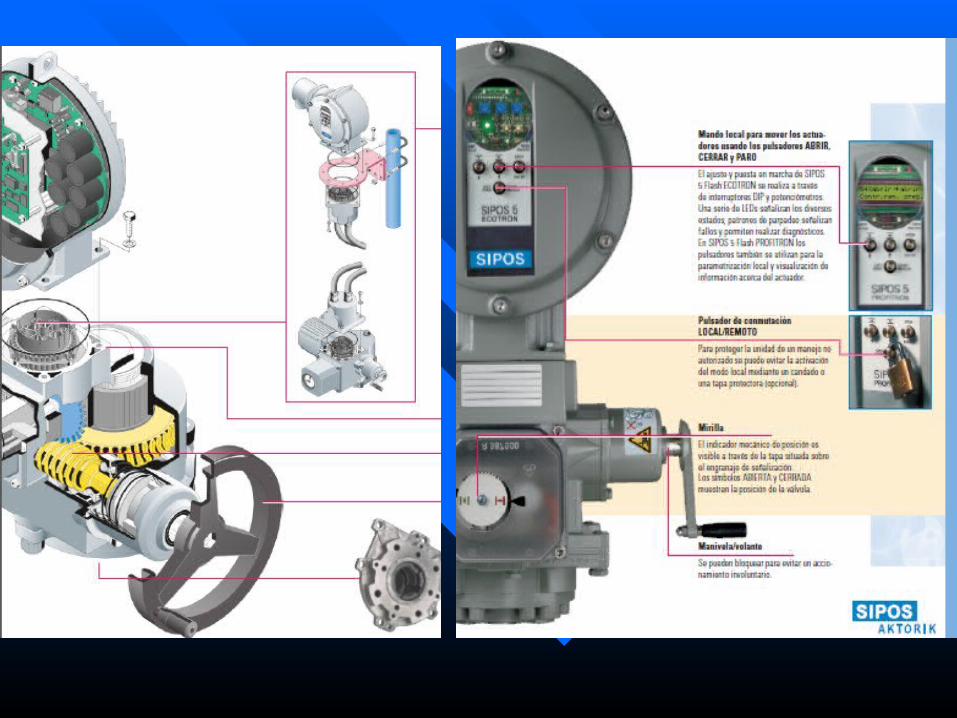
Los actuadores SIPOS 5 Flash son pioneros en este campo, marcando tendencias futuras.
Por ejemplo:
– en el sector de la energía, desde la central eléctrica hasta la calefacción de distrito
– en el sector de aguas, desde las estaciones potabilizadoras hasta las depuradoras
– en plantas industriales, desde cementeras hasta la industria alimentaria y química

Los actuadores SIPOS 5 Flash ejecutan todo tipo de tareas, controlando y regulando instalaciones de proceso, nuestra gama satisface todas las necesidades.
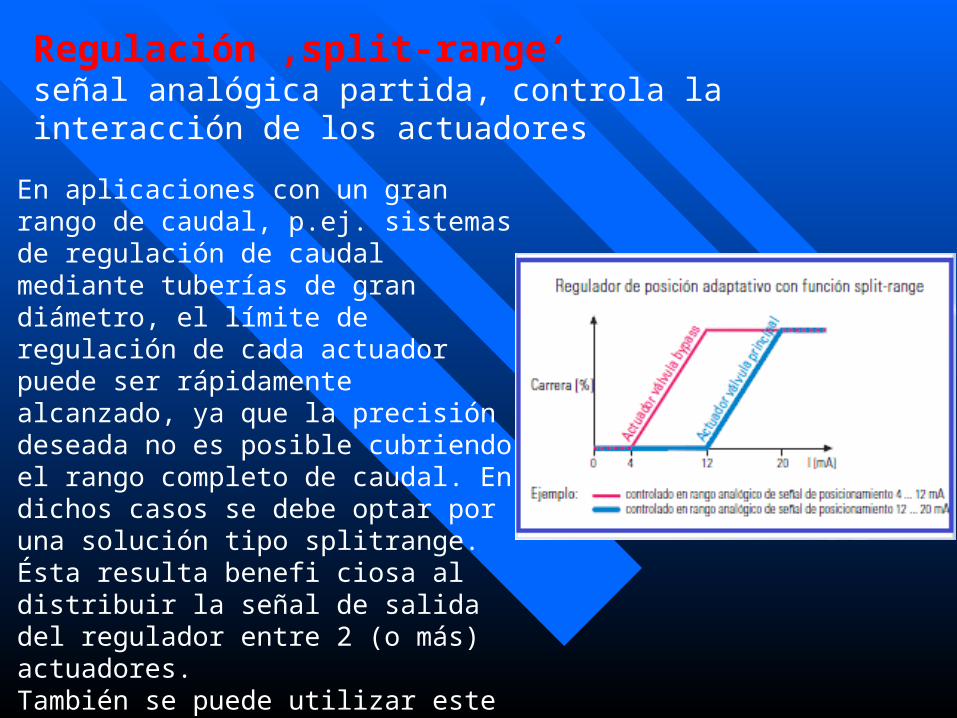
Regulación ‚split-range‘señal analógica partida, controla la interacción de los actuadores
En aplicaciones con un gran rango de caudal, p.ej. sistemas de regulación de caudal mediante tuberías de gran diámetro, el límite de regulación de cada actuador puede ser rápidamente alcanzado, ya que la precisión deseada no es posible cubriendo el rango completo de caudal. En dichos casos se debe optar por una solución tipo splitrange.Ésta resulta benefi ciosa al distribuir la señal de salida del regulador entre 2 (o más) actuadores.También se puede utilizar este modo de funcionamiento para normalizar el campo de regulación real de una válvula (p.ej. 20 – 80 %) a la señal entrada (p.ej. 4...20 mA).

Ejemplo:Aplicación con bypassInstalación en paralelo de una válvula grande“ y una „pequeña“ en un sistema de tuberías.Si los niveles de caudal son pequeños se procede a la apertura de la válvula „pequeña“, para caudales superiores se mantienen abiertas ambas válvulas. De esta forma se mejora considerablementela precisión de regulación con caudales reducidos. Esta disposición puede ayudar, por ejemplo, a evitar golpes de ariete yreducir el par necesario para la válvula „grande“ (– se pueden emplear actuadores de menor tamaño).
Ver Anexo 2

SimulacionesModelización y Control de Temperatura de un Reactor
“Batch” para un Proceso Químico Exotérmico
En el lazo secundario, la temperatura del agua de camisa es controlada mediante el caudal circulante a través del calentador E-2 y del enfriador E-3. En este caso tenemos dos válvulas de control, que regulan el caudal a través de los equipos E-2 y E-3. Para este caso utilizaremos una estrategia de control de rango partido (split-range control). En el caso de que la temperatura de camisa se encuentre por debajo de la consigna, abriremos el actuador CV-050 asociado al calentador . Si la temperatura del agua de camisa se encuentra por encima de la consigna, pasaremos a controlar el caudal a través del enfriador mediante el actuador CV-060.
En definitiva, el esquema de la estrategia de control en cascada y control en rango partido se muestra en la figura 3.1.

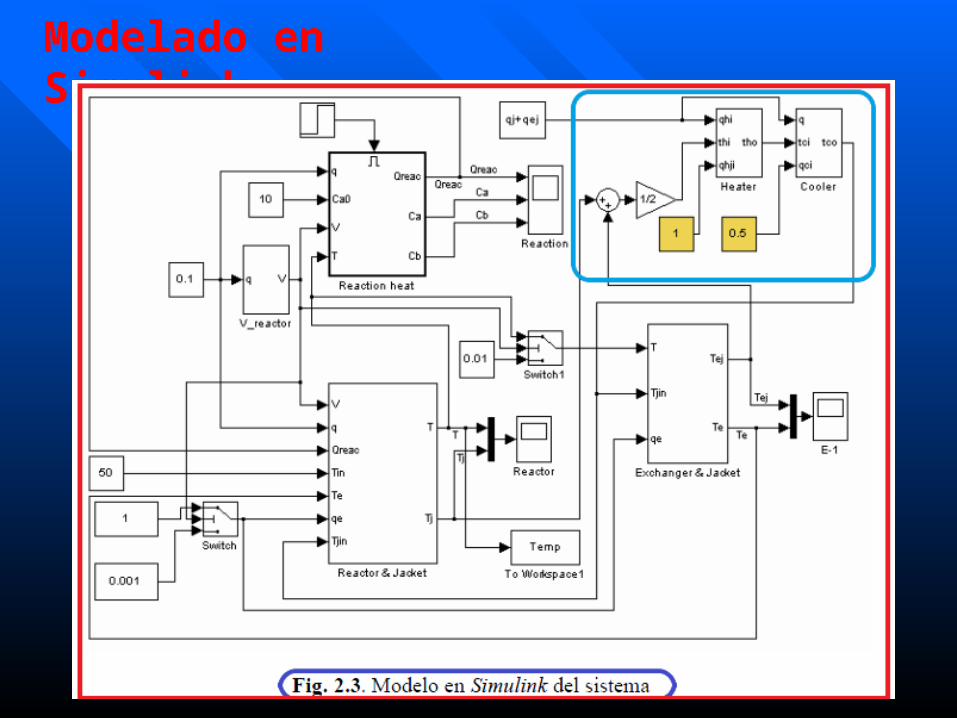
Modelado en Simulink

Como se observa en la figura 2.3, el modelo se compone de distintos bloques, los cuales agrupan:
· Reactor & Jacket, descripción del comportamiento del reactor y de la camisa
· Exchanger & Jacket, descripción del comportamiento del reciclo E-1 y de la camisa asociada.
· Reaction heat, calor producido por la reacción exotérmica.
· Heater, calentador con su camisa y entrada de vapor
· Cooler, enfriador y camisa asociada, así como también se incluye el bypass en su interior.
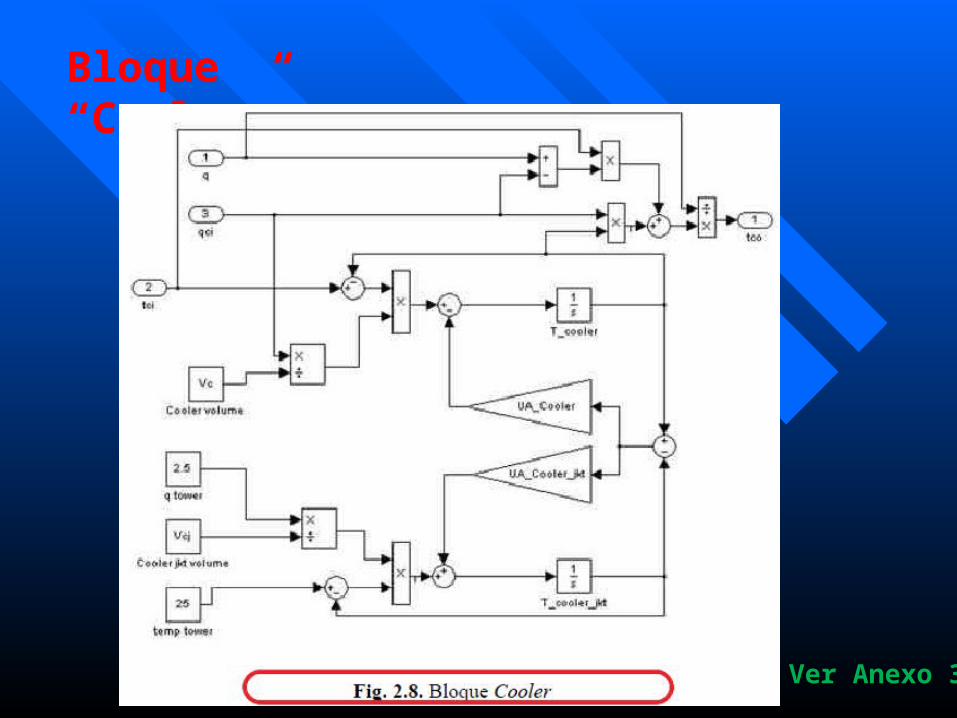
Bloque “Cooler”
Ver Anexo 3

Configuración y ProgramaciónLos pasos de la puesta en servicio deberán llevarse a cabo en el orden siguiente:1.Seleccionar idioma.2.Acceso al menú "Puesta en servicio"; autorización de acceso (código 9044).3. Seleccionar la dirección de cierre, ajustar la velocidad o el tiempo/la velocidad de ajuste, ajustar el tipo de desconexión y lafuerza/el par de desconexión.4. Comprobar otros ajustes específicos de la válvula (superar bloqueo, tiempo de aceleración, fuerza de frenado, advertenciadel motor, protección del motor, calefacción del motor).5. Ajustar la transmisión del engranaje de señalización y las posiciones finales.6. Ajustar el indicador mecánico de posición, si existe.7. Adaptar el actuador a los requisitos del sistema de automatización.

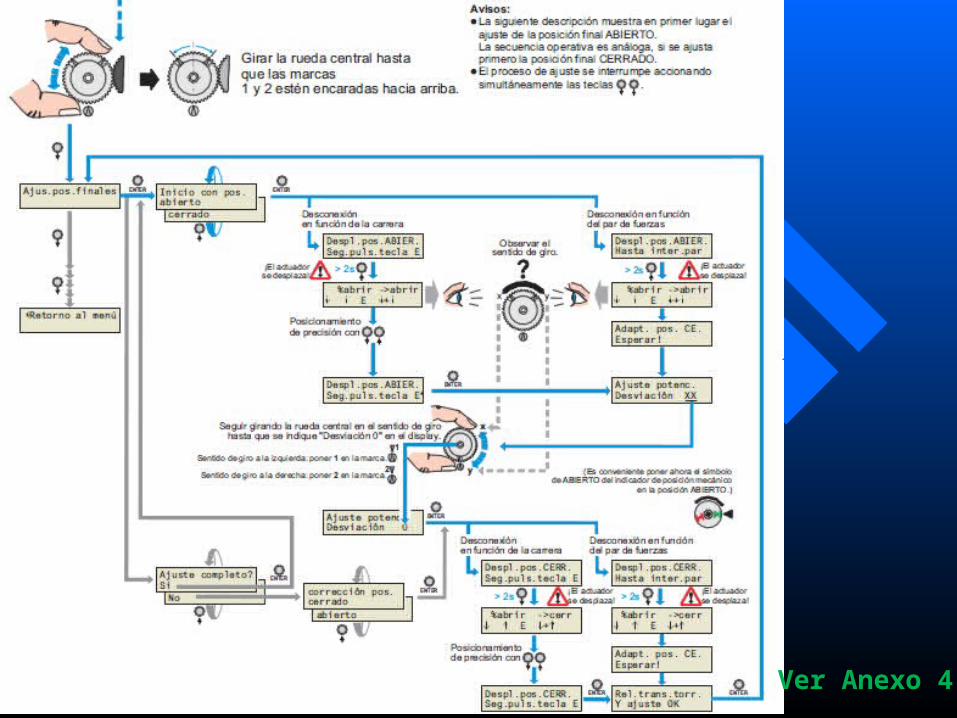
Ver Anexo 4


















