
SEXTA GUIA PARA TERCER PERIODO ASIGNATURA: …
12
SEXTA GUIA PARA TERCER PERIODO ASIGNATURA: TECNOLOGÍA E INFORMÁTICA GRADO: DECIMO Y ONCE TIEMPO DE DESARROLLO: 8 HORAS DOCENTE: JOSÉ ALBERTO GÓMEZ MUÑOZ ASPECTOS PEDAGÓGICOS PROPÓSITO DE FORMACIÓN: -Elaboración propia del concepto de maquina simple y operador mecánico aplicando los diferentes conceptos en el diseño de máquinas para lograr finalidades. -Identificar los tipos de máquinas simples y operadores mecánicos de acuerdo a las características y funcionalidad de cada uno. PREGUNTAS ORIENTADORAS -¿Qué es la mecánica? -¿Cuáles son las maquinas simples y cómo funcionan? -¿Qué es el diseño mecánico? -¿Cuáles son los principales operadores mecánicos y cómo funcionan? LOGRO DE APRENDIZAJE -Reconocer la importancia del diseño mecánico en la cotidianidad del hombre analizando sistemas de transmisión de movimiento mecánico. CRITERIOS DE EVALUACIÓN -funcionalidad del diseño planteado. -Argumentación del funcionamiento de la máquina. -Presentación del trabajo propuesto. METODOLOGÍA: La presente guía debe ser realizada por los estudiantes en el transcurso de la semana propuesta para la materia de tecnología, teniendo en cuenta que la fecha máxima de entrega será el viernes de esa semana, las 3 actividades deben ser enviadas en un solo archivo al final (no por partes), de acuerdo a lo anterior el procedimiento será el siguiente: 1-realizar cada una de las actividades propuestas en medio pliego de cartulina blanca guiándose por los aspectos vistos en la guía física que se le entregara a cada estudiante o en la guía virtual suministrada por su docente director de curso, y se debe hacer llegar al colegio según las fechas indicadas. o de manera virtual tomando fotos de lo realizado y enviándolas al correo [email protected] 2-las guías también pueden ser descargadas de la página del área de tecnología del Colegio El rodeo ingresando a Google y digitando www.tecnorodeo.jimdo.com allí encontraran un botón llamado guías de sexta entrega donde podrán encontrar: Guías de sexto-séptimo, octavo-noveno y décimo-once. Las cuales podrán ser descargadas por cualquier persona sin registro y sin clave. Nota: si aparece un aviso de emergencia al ingresar a la página de tecnología dar clic en opciones avanzadas y continuar para poder ingresar y bajar las guías. 3- Colocar al final de la solución de la guía su nota de auto evaluación y su reflexión sobre lo aprendido. 4-los estudiantes que lo envíen al correo indicado recibirán una nota de respuesta donde se confirmará que se ha recibido el trabajo o que hay que mejorar. 5- En los correos enviados en el asunto se debe escribir el nombre del estudiante con apellidos, curso y jornada. NOTA: CADA ACTIVIDAD VALE UNA NOTA. LOS MECANISMOS: MÁQUINAS EN MOVIMIENTO. 1. INTRODUCCIÓN. El ser humano necesita realizar tareas que sobrepasan su capacidad física o intelectual: mover rocas enormes, elevar carros para repararlos, transportar objetos o personas a grandes distancias, cortar árboles, resolver gran número de operaciones matemáticas en poco tiempo, etc... Para solucionar este problema se inventaron las MÁQUINAS. La función de las máquinas es reducir el esfuerzo necesario para realizar un trabajo. 1.1.- PARTES DE UNA MÁQUINA. En general, y de forma simplificada, se puede decir que toda máquina está formada por 3 elementos principales: 1) Elemento motriz: dispositivo que introduce la fuerza o el movimiento en la máquina. Suele tratarse de un motor (de gasolina o eléctrico), de esfuerzo muscular (de una persona o un animal), una fuerza natural (viento, corriente de agua de un rio), etc. OPERADORES ENERGETICOS Este tipo de operadores son los encargados de almacenar energía o fuerza y transformarla en otro tipo para que el dispositivo puede activarse y ejercer su función. Ejemplos: Turbina eólica Turbina hidráulica Operador muscular
Transcript of SEXTA GUIA PARA TERCER PERIODO ASIGNATURA: …
SEXTA GUIA PARA TERCER PERIODO
ASIGNATURA: TECNOLOGÍA E INFORMÁTICA GRADO: DECIMO Y ONCE
TIEMPO DE DESARROLLO: 8 HORAS DOCENTE: JOSÉ ALBERTO GÓMEZ MUÑOZ
ASPECTOS PEDAGÓGICOS
PROPÓSITO DE FORMACIÓN: -Elaboración propia del concepto de maquina simple y operador mecánico aplicando los diferentes conceptos en el diseño de máquinas para lograr finalidades. -Identificar los tipos de máquinas simples y operadores mecánicos de acuerdo a las características y funcionalidad de cada uno.
PREGUNTAS ORIENTADORAS -¿Qué es la mecánica? -¿Cuáles son las maquinas simples y cómo funcionan? -¿Qué es el diseño mecánico? -¿Cuáles son los principales operadores mecánicos y cómo funcionan?
LOGRO DE APRENDIZAJE -Reconocer la importancia del diseño mecánico en la cotidianidad del hombre analizando sistemas de transmisión de movimiento mecánico.
CRITERIOS DE EVALUACIÓN -funcionalidad del diseño planteado. -Argumentación del funcionamiento de la máquina. -Presentación del trabajo propuesto.
METODOLOGÍA: La presente guía debe ser realizada por los estudiantes en el transcurso de la semana propuesta para la materia de tecnología, teniendo en cuenta que la fecha máxima de entrega será el viernes de esa semana, las 3 actividades deben ser enviadas en un solo archivo al final (no por partes), de acuerdo a lo anterior el procedimiento será el siguiente: 1-realizar cada una de las actividades propuestas en medio pliego de cartulina blanca guiándose por los aspectos vistos en la guía física que se le entregara a cada estudiante o en la guía virtual suministrada por su docente director de curso, y se debe hacer llegar al colegio según las fechas indicadas. o de manera virtual tomando fotos de lo realizado y enviándolas al correo [email protected] 2-las guías también pueden ser descargadas de la página del área de tecnología del Colegio El rodeo ingresando a Google y digitando www.tecnorodeo.jimdo.com allí encontraran un botón llamado guías de sexta entrega donde podrán encontrar: Guías de sexto-séptimo, octavo-noveno y décimo-once. Las cuales podrán ser descargadas por cualquier persona sin registro y sin clave. Nota: si aparece un aviso de emergencia al ingresar a la página de tecnología dar clic en opciones avanzadas y continuar para poder ingresar y bajar las guías. 3- Colocar al final de la solución de la guía su nota de auto evaluación y su reflexión sobre lo aprendido. 4-los estudiantes que lo envíen al correo indicado recibirán una nota de respuesta donde se confirmará que se ha recibido el trabajo o que hay que mejorar. 5- En los correos enviados en el asunto se debe escribir el nombre del estudiante con apellidos, curso y jornada. NOTA: CADA ACTIVIDAD VALE UNA NOTA.
LOS MECANISMOS: MÁQUINAS EN MOVIMIENTO. 1. INTRODUCCIÓN. El ser humano necesita realizar tareas que sobrepasan su capacidad física o intelectual: mover rocas enormes, elevar carros para repararlos, transportar objetos o personas a grandes distancias, cortar árboles, resolver gran número de operaciones matemáticas en poco tiempo, etc... Para solucionar este problema se inventaron las MÁQUINAS. La función de las máquinas es reducir el esfuerzo necesario para realizar un trabajo. 1.1.- PARTES DE UNA MÁQUINA. En general, y de forma simplificada, se puede decir que toda máquina está formada por 3 elementos principales: 1) Elemento motriz: dispositivo que introduce la fuerza o el movimiento en la máquina. Suele tratarse de un motor (de gasolina o eléctrico), de esfuerzo muscular (de una persona o un animal), una fuerza natural (viento, corriente de agua de un rio), etc. OPERADORES ENERGETICOS Este tipo de operadores son los encargados de almacenar energía o fuerza y transformarla en otro tipo para que el dispositivo puede activarse y ejercer su función. Ejemplos:
Turbina eólica Turbina hidráulica Operador muscular

Operador eléctrico 2) Mecanismo: dispositivo que traslada el movimiento del elemento motriz al elemento receptor. 3) Elemento receptor: recibe el movimiento o la fuerza para realizar la función de la máquina (un ejemplo de elementos receptores son las ruedas).
1.2.- MECANISMOS. Toda máquina contiene uno o varios mecanismos que le sirven para controlar o transformar el movimiento producido por el elemento motriz.
Todo mecanismo de cualquier máquina estará compuesto internamente por uno o varios dispositivos denominadas “operadores” (palancas, engranajes, ruedas, tornillos, etc.). Por ejemplo, el mecanismo de una bicicleta está formado por varios operadores, como son la cadena y los engranajes que conecta (platos y piñones). 1.3.- TIPOS DE MOVIMIENTOS. En apartados anteriores se ha estudiado que las máquinas emplean mecanismos, cuya misión es recibir el movimiento del elemento motriz, para adaptarlo y transmitirlo al elemento receptor. En las máquinas se pueden diferenciar los siguientes tipos de movimientos:
Ejemplos: -Si el elemento motriz produce un movimiento circular, y el elemento receptor necesita recibir un movimiento circular, el mecanismo sólo tendrá que transmitir el movimiento del elemento motriz al elemento receptor. Esto ocurre, por ejemplo, en la bicicleta. -Si el elemento motriz produce un movimiento lineal, y el elemento receptor necesita recibir un movimiento circular, el mecanismo deberá transformar el movimiento de lineal a circular, y transmitir después dicho movimiento al receptor. Esto ocurre, por ejemplo, en la locomotora (tren). 2. MECANISMOS DE TRANSMISIÓN. Los mecanismos de transmisión del movimiento únicamente transmiten el movimiento a otro punto, sin transformarlo. Por tanto, si el movimiento es lineal a la entrada, seguirá siendo lineal a la salida; si el movimiento es circular a la entrada, seguirá siendo circular a la salida. Existen dos tipos de mecanismos de transmisión, según el tipo de movimiento que transmiten:
1) Mecanismos de transmisión lineal (máquinas simples). 2) Mecanismos de transmisión circular. 2.1.- MECANISMOS DE TRANSMISIÓN LINEAL (MÁQUINAS SIMPLES). Las máquinas simples son artilugios muy sencillos ideados en la antigüedad por el ser humano para ahorrar esfuerzos a la hora de realizar ciertas tareas. Estos dispositivos se denominan máquinas simples porque sólo se componen de un elemento: el mecanismo de transmisión lineal.
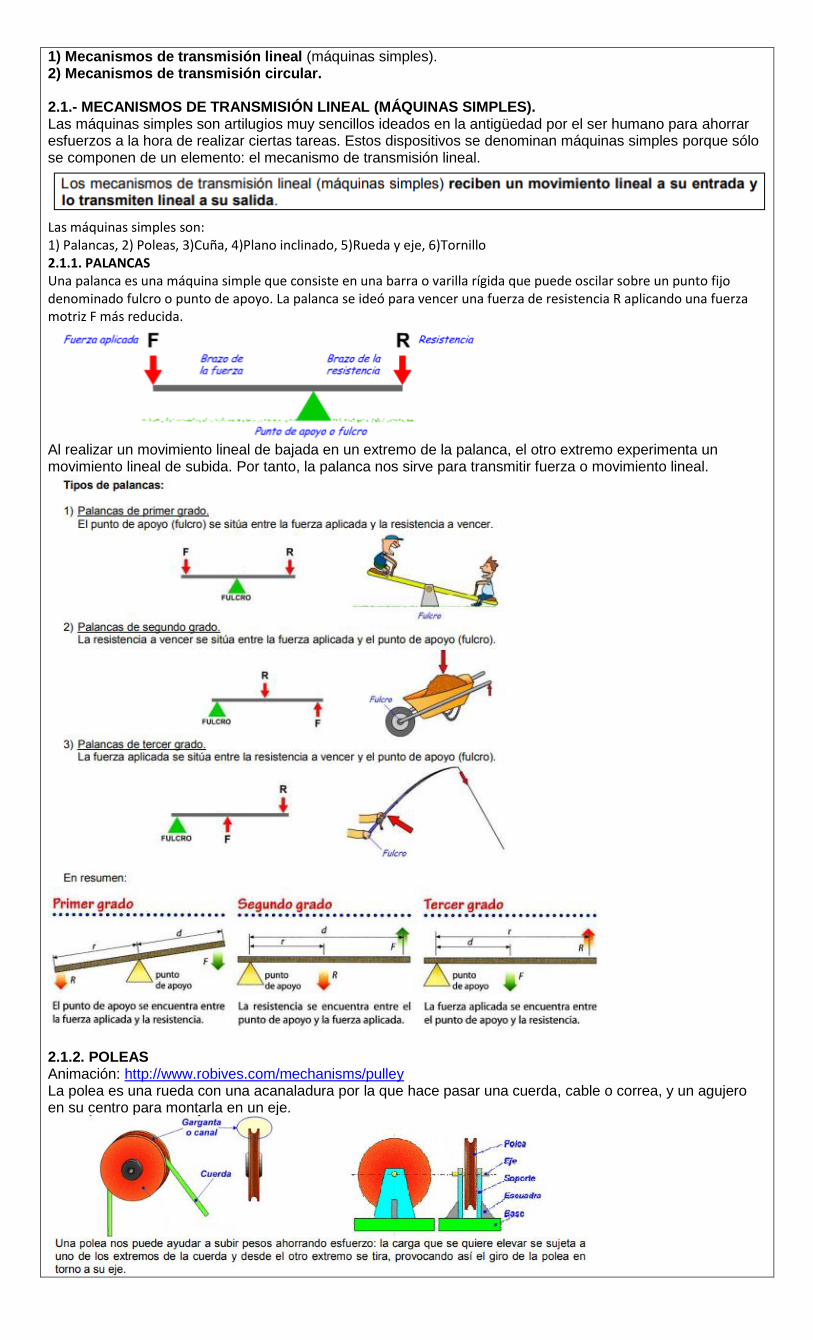
Las máquinas simples son: 1) Palancas, 2) Poleas, 3)Cuña, 4)Plano inclinado, 5)Rueda y eje, 6)Tornillo 2.1.1. PALANCAS Una palanca es una máquina simple que consiste en una barra o varilla rígida que puede oscilar sobre un punto fijo denominado fulcro o punto de apoyo. La palanca se ideó para vencer una fuerza de resistencia R aplicando una fuerza motriz F más reducida.
Al realizar un movimiento lineal de bajada en un extremo de la palanca, el otro extremo experimenta un movimiento lineal de subida. Por tanto, la palanca nos sirve para transmitir fuerza o movimiento lineal.
2.1.2. POLEAS Animación: http://www.robives.com/mechanisms/pulley La polea es una rueda con una acanaladura por la que hace pasar una cuerda, cable o correa, y un agujero en su centro para montarla en un eje.

Existen dos tipos de poleas: a) Polea fija (polea simple).
Se trata de una polea donde su eje se fija a un soporte, manteniéndola inmóvil. No proporciona ahorro de esfuerzo para subir una carga (F = R). Sólo se usa para cambiar la dirección o sentido de la fuerza aplicada y hacer más cómodo su levantamiento (porque nuestro peso nos ayuda a tirar). b) Polipasto.
Se le llama así a un conjunto de dos o más poleas se le llama polipasto. El polipasto está constituido por dos grupos de poleas: -Poleas fijas: son poleas inmóviles, porque están sujetas a un soporte. -Poleas móviles: son poleas que se mueven. A medida que aumentamos el número de poleas en un polipasto, el mecanismo es más complejo, pero permite reducir mucho más el esfuerzo necesario para levantar una carga. Los polipastos se usan para elevar cargas muy pesadas con menor esfuerzo. 2.1.3. CUÑA De forma sencilla se podría describir como un prisma triangular con un ángulo muy agudo. También podríamos decir que es una pieza terminada en una arista afilada que actúa como un plano inclinado móvil.
La cuña es sumamente versatil y forma parte de multitud de mecanismo de uso cotidiano. Algunas de sus utilidades prácticas son: Modificar la dirección de una fuerza. Pues convierte una fuerza longitudinal en dos fuerzas perpendiculares a los planos que forman el ángulo agudo. Esta utilidad es la empleada para abrir o separar cuerpos: obtener tablones de los árboles, partir piedras en canteras, cerrar o abrir los dientes de una cremallera... Convertir un movimiento lineal en otro perpendicular. Si combinamos dos cuñas podemos convertir el movimiento lineal de una en el desplazamiento perpendicular de la otra creando una gran fuerza de apriete. Esta utilidad es especialmente apreciada en el ajuste de ensambles en madera, sujección de puertas, ajuste de postes en la construcción, llaves de cerraduras...
2.1.4. PLANO INCLINADO El plano inclinado es una superficie plana que forma con otra un ángulo muy agudo (mucho menor de 90º). En la naturaleza aparece en forma de rampa, pero el ser humano lo ha adaptado a sus necesidades haciéndolo móvil, como en el caso del hacha o del cuchillo. El plano inclinado es el punto de partida de un nutrido grupo de operadores y mecanismos cuya utilidad tecnológica es indiscutible. Sus principales aplicaciones son tres: Se emplea en forma de rampa para reducir el esfuerzo necesario para elevar una masa (carreteras, subir ganado a camiones, acceso a garajes subterráneos, escaleras...).

2.1.5. RUEDA Y EJE La rueda es un disco con un orificio central por el que penetra un eje que le guía en el movimiento y le sirve de sustento. La parte operativa de la rueda es la periferia del disco, que se recubre con materiales o terminaciones de diversos tipos con el fin de adaptarla a la utilidad correspondiente. Algunas de las ruedas más empleadas son: Rueda dentada, empleada principalmente para la transmisión del movimiento giratorio entre ejes. Rueda de transporte, empleada para reducir el rozamiento con el suelo. Unas muy empleadas con las de cámara de aire. Polea, muy empleada tanto para la transmisión de movimientos como para la reducción del esfuerzo al elevar o mover pesos. Turbinas (rueda de palas), empleadas para la obtención de un movimiento giratorio a partir del movimiento de un fluido (agua, aire, aceíte...)
Las ruedas se emplean en multitud de aplicaciones, algunas muy usuales son: Facilitar el desplazamiento de objetos reduciendo el rozamiento entre superficies (tren de rodadura, rodillo, rodamiento); como en carretillas, coches, bicicletas, patinetes, pasillos rodantes... 2.1.6. TORNILLO El tornillo es un operador que deriva directamente del plano inclinado y siempre trabaja asociado a un orificio roscado
Básicamente puede definirse como un plano inclinado enrollado sobre un cilindro, o lo que es más realista, un surco helicoidal tallado en la superficie de un cilindro (si está tallado sobre un cilindro afilado o un cono tendremos un tirafondo o tornillo normal). ACTIVIDAD 1 DISEÑO DE UNA MAQUINA COMPUESTA POR MAQUINAS SIMPLES Teniendo en cuenta los mecanismos de transmisión lineal y tipos de movimientos vistos anteriormente realizar el diseño de una maquina en 3 dimensiones en medio pliego de cartulina blanca marcada correctamente, donde se integren los siguientes aspectos en su diseño:
a. Debe tener un elemento motriz (operador energético) de inicio de la maquina como una turbina de aire, una turbina de agua, un motor eléctrico o’ un operador muscular (manivela).
b. Se debe incluir 3 de los 4 tipos de movimientos (lineal, circular, circular oscilante y lineal alternativo) en su funcionamiento.
c. Los 6 tipos de máquinas simples. d. Debe tener una o varias finalidades como meter una cesta, tumbar unas fichas encender un bombillo
etc...
Nota: el docente hará una clase asincrónica por plataforma virtual para despejar dudas en la elaboración metodológica de esta actividad, por lo cual es importante que lean e interpreten anticipadamente los contenidos teóricos suministrados. VER EJEMPLO ANEXO 1

3. OPERADORES PARA LA TRANSFORMACIÓN DE MOVIMIENTOS Para la elaboración de nuestros proyectos tecnológicos necesitamos emplear mecanismos que a su vez están construidos con operadores. La mayoría de los operadores mecánicos derivan de una máquina simple (o de una combinación de ellas), por lo que, aunque no sea una agrupación muy usual, se puede relacionar cada operador mecánico con la máquina simple de la que deriva. 3.1 BIELA Consiste en una barra rígida diseñada para establecer uniones articuladas en sus extremos. Permite la unión de dos operadores transformando el movimiento rotativo de uno (manivela, excéntrica, cigüeñal...) en el lineal alternativo del otro (émbolo...), o viceversa. Desde el punto de vista tecnológico, una de las principales aplicaciones de la biela consiste en convertir un
movimiento giratorio continuo en uno lineal alternativo, o viceversa. La amplitud del movimiento lineal
alternativo depende de la excentricidad del operador al que esté unido. Este operador suele estar asociado
siempre a una manivela (o también a una excéntrica o a un cigüeñal).
La biela se emplea en multitud de máquinas que precisan de la conversión entre movimiento giratorio continuo y lineal alternativo. Son ejemplos claros: trenes con máquina de vapor, motores de combustión interna (empleados en automóviles, motos o barcos); máquinas movidas mediante el pie (máquinas de coser, ruecas, piedras de afilar), bombas de agua...etc. 3.2 CIGÜEÑAL Cuando varias manivelas se asocian sobre un único eje da lugar al cigüeñal. En realidad este operador se comporta como una serie de palancas acopladas sobre el mismo eje o fulcro. En el cigüeñal se distinguen cuatro partes básicas: eje, muñequilla, cuello y brazo. -El eje sirve de guía en el giro. Por él llega o se extrae el movimiento giratorio. -El cuello está alineado con el eje y permite guiar el giro al unirlo a soportes adecuados. -La muñequilla sirve de asiento a las cabezas de las bielas. -El brazo es la pieza de unión entre el cuello y la muñequilla. Su longitud determina la carrera de la biela.
La utilidad práctica del cigüeñal viene de la posibilidad de convertir un movimiento rotativo continuo en uno lineal alternativo, o viceversa. Para ello se ayuda de bielas (sistema biela-manivela sobre un cigüeñal). 3.3 CREMALLERA En mecánica, una cremallera es un prisma rectangular con una de sus caras laterales tallada con dientes. Estos pueden ser rectos o curvados y estar dispuestos en posición transversal u oblicua. Desde el punto de vista tecnológico podemos considerarla como un caso particular de la rueda dentada, pues puede suponerse que es un engranaje de radio infinito.
Se emplea, junto con un engranaje (piñón), para convertir un movimiento giratorio en longitudinal o viceversa. Tiene gran aplicación en apertura y cierre de puertas automáticas de corredera, desplazamiento de órganos de algunas máquinas herramientas (taladros, tornos, fresadoras...), cerraduras, microscopios, gatos de coche... 3.4 ÉMBOLO El émbolo es una barra cuyos movimientos se encuentran limitados a una sola dirección como consecuencia
de emplear guías. Solamente está sometido a esfuerzos de tracción y compresión.
Si analizáramos el desplazamiento de la biela en un mecanismo biela-manivela observaríamos que su pie
sigue un movimiento lineal alternativo, pero la orientación de su cuerpo varía constantemente dependiendo de
la posición adoptada. Para conseguir un movimiento lineal alternativo más perfecto se recurre al émbolo.
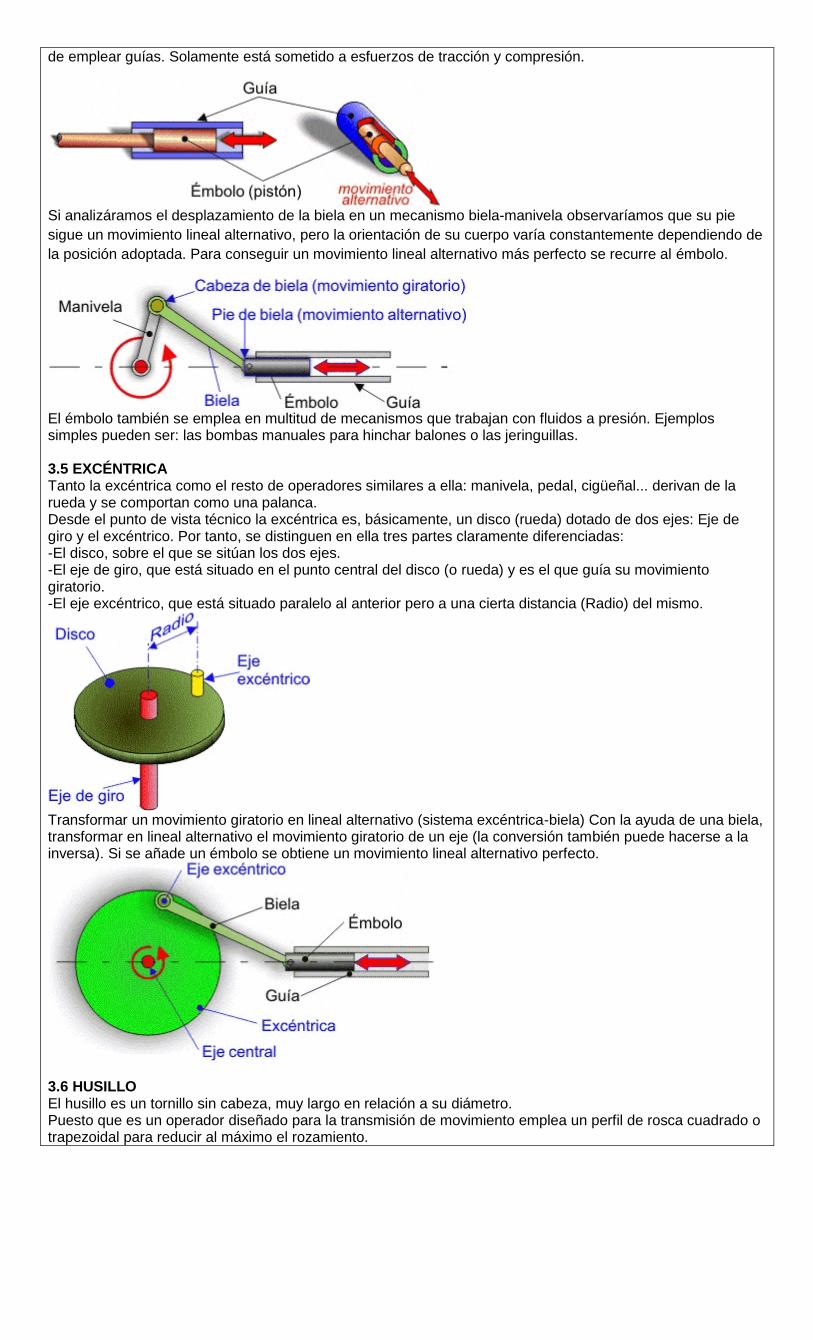
El émbolo también se emplea en multitud de mecanismos que trabajan con fluidos a presión. Ejemplos simples pueden ser: las bombas manuales para hinchar balones o las jeringuillas. 3.5 EXCÉNTRICA Tanto la excéntrica como el resto de operadores similares a ella: manivela, pedal, cigüeñal... derivan de la rueda y se comportan como una palanca. Desde el punto de vista técnico la excéntrica es, básicamente, un disco (rueda) dotado de dos ejes: Eje de giro y el excéntrico. Por tanto, se distinguen en ella tres partes claramente diferenciadas: -El disco, sobre el que se sitúan los dos ejes. -El eje de giro, que está situado en el punto central del disco (o rueda) y es el que guía su movimiento giratorio. -El eje excéntrico, que está situado paralelo al anterior pero a una cierta distancia (Radio) del mismo.
Transformar un movimiento giratorio en lineal alternativo (sistema excéntrica-biela) Con la ayuda de una biela, transformar en lineal alternativo el movimiento giratorio de un eje (la conversión también puede hacerse a la inversa). Si se añade un émbolo se obtiene un movimiento lineal alternativo perfecto.
3.6 HUSILLO El husillo es un tornillo sin cabeza, muy largo en relación a su diámetro. Puesto que es un operador diseñado para la transmisión de movimiento emplea un perfil de rosca cuadrado o trapezoidal para reducir al máximo el rozamiento.

En combinación con una tuerca o un orificio roscado en otro operador, se emplea para convertir un movimiento giratorio en uno longitudinal, dando lugar al denominado sistema tornillo-tuerca. Lo podemos encontrar en tornos, fresadoras, presillas, prensas, pegamento en barra... 3.7 LEVA La leva es un disco con un perfil externo parcialmente circular sobre el que apoya un operador móvil (seguidor de leva) destinado a seguir las variaciones del perfil de la leva cuando esta gira. Conceptualmente deriva de la rueda y del plano inclinado. La leva va solidaria con un eje (árbol) que le transmite el movimiento giratorio que necesita; en muchas aplicaciones se recurre a montar varias levas sobre un mismo eje o árbol (árbol de levas), lo que permite la sincronización del movimiento de varios seguidores a la vez.
Perfiles de leva La forma del contorno de la leva (perfil de leva) siempre está supeditada al movimiento que se necesite en el seguidor, pudiendo aquel adoptar curvas realmente complejas.
La leva es un mecanismo que nos permite transformar un movimiento giratorio en uno alternativo lineal (sistema leva-émbolo) o circular (sistema leva-palanca), estando su principal utilidad en la automatización de máquinas (programadores de lavadora, control de máquinas de vapor, apertura y cierre de las válvulas de los motores de explosión...).
3.8 MANIVELA Desde el punto de vista técnico es un eje acodado, conceptualmente derivado de la palanca y la rueda. En ella se pueden distinguir tres partes principales: Eje, Brazo y Empuñadura. -El eje determina el centro de giro de la manivela. -El brazo determina la distancia entre eje y empuñadura. Es similar al brazo de una palanca. -La empuñadura es la parte adaptada para ser cogida con las manos (en el caso de los pedales esta se adapta a las características del pie).

Además de las utilidades propias de la excéntrica (conversión de movimientos), la manivela es el operador manual más empleado para disminuir la fuerza necesaria para imprimir un movimiento rotativo a una eje (cuando se mueve empleando los pies recibe el nombre de pedal). Se emplea en multitud de objetos: pasapurés, tornos, gatos, bicicletas, toldos enrollables, puertas elevables...
3.9 RODILLO El rodillo es simplemente un cilindro (o un tubo) mucho más largo de grueso. En la actualidad también se le da el nombre de rodillo a ruedas cuya longitud es muy grande respecto a su diámetro y que manteniéndose fijas en el espacio (gracias a que también disponen de un eje de giro) permiten el desplazamiento de objetos sobre ellas.
Permite suprimir (más bien minimizar) la fricción que existe entre un objeto y la superficie sobre la que se mueve, al convertir el desplazamiento por deslizamiento en desplazamiento por rodadura. La principal diferencia entre el rodillo y la rueda es que esta se desplaza con el objeto que se mueve (va unida a él gracias al eje y el soporte), mientras que el rodillo no (permanece fijo en el espacio o se traslada a diferente velocidad que el objeto). 3.10 RUEDA DENTADA (ENGRANAJE- PIÑÓN-LINTERNA) La rueda dentada (engranaje, piñón) es, básicamente, una rueda con el perímetro totalmente cubierto de dientes. El tipo más común de rueda dentada lleva los dientes rectos (longitudinales) aunque también las hay con los dientes curvos, oblicuos... Para conseguir un funcionamiento correcto, este operador suele girar solidario con su eje, por lo que ambos se ligan mediante una unión desmontable que emplea otro operador denominado chaveta.
Este operador se puede emplear para dos funciones básicas: -Transmitir un movimiento giratorio entre dos ejes con la idea de modificar su sentido de giro, velocidad o dirección, bien acoplándose directamente varias ruedas dentadas entre sí (rueda dentada-linterna, tren de engranajes, sinfín-piñón) o empleando una cadena articulada (mecanismo cadena-piñón). El sistema de engranajes se emplea mucho en automóviles (cambio de marchas), máquinas herramientas (taladros, tornos, fresadoras...), relojería... como reductor de velocidad, pues permite acoplar ejes paralelos o que se crucen con cualquier ángulo

3.10.1 LINTERNA Durante la edad media se empleaban mecanismos de rueda dentada-linterna que eran de uso común en todos los ingenios hidráulicos de la época (molinos, mazos...). Permite acoplar ejes paralelos o cruzados a 90º
3.10.2 EL SISTEMA CADENA-PIÑÓN Podemos verlo en bicicletas, motos, puertas de apertura automática (ascensores, supermercados, aeropuertos...), mecanismos internos de motores...; pero solamente permite acoplar ejes paralelos entre si.
3.10.3 SINFÍN Desde el punto de vista conceptual el sinfín es considerado una rueda dentada de un solo diente que ha sido tallado helicoidalmente (en forma de hélice). Este operador ha sido diseñado para la transmisión de movimientos giratorios, por lo que siempre trabaja unido a otro engranaje El sinfín, acompañado de un piñón (mecanismo sinfín-piñón), se emplea para transmitir un movimiento giratorio entre ejes perpendiculares que se cruzan, obteniendo una gran reducción de velocidad. Podemos encontrarlo en limpiaparabrisas, clavijas de guitarra, reductores de velocidad para motores, manivelas para andamios colgantes...
Otra variación puede ser:
ACTIVIDAD 2 DISEÑO DE UNA MAQUINA COMPUESTA POR OPERADORES MECANICOS Teniendo en cuenta los operadores energéticos, los operadores mecánicos y las maquinas simples vistos anteriormente realizar el diseño de una maquina en 3 dimensiones en medio pliego de cartulina blanca marcada correctamente, donde se integren los siguientes aspectos en su diseño: a. Debe tener un elemento motriz (operador energético) de inicio de la maquina como una turbina de aire, una turbina de agua, un motor eléctrico o’ un operador muscular (manivela). b. Se debe incluir 7 operadores mecánicos de los 13 vistos.

c. Debe incluir 3 máquinas simples. d. Se debe llegar a una finalidad como apagar una vela, explotar una bomba, hacer un gol, hacer una cesta etc… Nota: el docente hará una clase asincrónica por una plataforma virtual para despejar dudas en la elaboración metodológica de esta actividad, por lo cual es importante que lean e interpreten anticipadamente los contenidos teóricos suministrados. VER EJEMPLO ANEXO 2
RECURSOS PARA QUE EL ESTUDIANTE UTILICE: Identificación y descripción de operadores http://concurso.cnice.mec.es/cnice2006/material107/ Teoría de operadores mecánicos. https://docs.google.com/viewer?a=v&pid=sites&srcid=ZGVmYXVsdGRvbWFpbnx0ZWNub2xvZ2lhaW5kdXN0cmlhbGliaXphfGd4OjU1ZDU1ZDdhYTUwNTNkZDc funcionamiento de algunos operadores mecánicos. https://salesianosorotava-tecnologia.blogspot.com/2012/01/operadores-mecanicos.html mecaneso. http://concurso.cnice.mec.es/cnice2006/material107/ AUTOEVALUACIÓN DEL ESTUDIANTE (¿QUE APRENDIÓ?, ¿ESE APRENDIZAJE PARA QUE LE SIRVE PARA LA VIDA?) ANEXO 1
ANEXO 2



















