SERIES DE TIEMPO - econometriaii.files.wordpress.com · La técnica de alisado exponencial, Medias...
105
CAPITULO II SERIES DE TIEMPO 1º INTRODUCCIÓN La mayoría de las empresas y agentes económicos precisan realizar predicciones sobre el comportamiento de su evolución y del entorno donde actúan. Estas predicciones se utilizan para tomar decisiones operativas y, a veces, estratégicas. El conocimiento de acontecimientos futuros estará obviamente afectado de un alto grado de incertidumbre, lo que implica la utilización de probabilidades asociadas al proceso de predicción, y de modelos estadísticos y econométricos. 1.1. REGRESIÓN ESPURIA Este problema surge porque si las dos series de tiempo involucradas presentan tendencias fuertes (movimientos sostenidos hacia arriba o hacia abajo), el alto R 2 observado se debe a la presencia de la tendencia y no a la verdadera relación entre las dos. Por consiguiente es muy importante averiguar si la relación entre las variables económicas es verdadera o es espuria. Como lo han sugerido Granger y Newbold : una buena regla práctica para sospechar que la regresión estimada sufre de regresión espuria es que R 2 > D-W. Cuando las series de tiempo son no estacionarias, no se debe depender de los valores "t" estimados. Si las series de tiempo están cointegradas, entonces los resultados de la regresión estimada pueden no ser espurios y las pruebas "t" y "F" usuales son válidas. Como lo afirma Granger: "Una prueba de cointegración puede ser considerada como una prueba previa para evitar situaciones de regresión espuria". Por ejemplo: Se tiene las series anuales (1936-1972) del PNB nominal en Estados Unidos (datos en miles de millones de dólares), y de la Incidencia del melanoma en la población masculina (datos ajustados de edad) en el estado de Connecticut. Observando los gráficos, ambas series mantienen una relación lineal. 0 200 400 600 800 0 1 2 3 4 5 6 1940 1945 1950 1955 1960 1965 1970 GNP MELANOMA 100 200 300 400 500 600 700 800 0 1 2 3 4 5 6 MELANOMA GNP
Transcript of SERIES DE TIEMPO - econometriaii.files.wordpress.com · La técnica de alisado exponencial, Medias...

CCAAPPIITTUULLOO IIII
SERIES DE TIEMPO 1º INTRODUCCIÓN
La mayoría de las empresas y agentes económicos precisan realizar predicciones sobre el comportamiento de su evolución y del entorno donde actúan.
Estas predicciones se utilizan para tomar decisiones operativas y, a veces, estratégicas.
El conocimiento de acontecimientos futuros estará obviamente afectado de un alto grado de incertidumbre, lo que implica la utilización de probabilidades asociadas al proceso de predicción, y de modelos estadísticos y econométricos.
1.1. REGRESIÓN ESPURIA
Este problema surge porque si las dos series de tiempo involucradas presentan tendencias fuertes (movimientos sostenidos hacia arriba o hacia abajo), el alto R2 observado se debe a la presencia de la tendencia y no a la verdadera relación entre las dos. Por consiguiente es muy importante averiguar si la relación entre las variables económicas es verdadera o es espuria.
Como lo han sugerido Granger y Newbold : una buena regla práctica para sospechar que la regresión estimada sufre de regresión espuria es que R2 > D-W.
Cuando las series de tiempo son no estacionarias, no se debe depender de los valores "t" estimados. Si las series de tiempo están cointegradas, entonces los resultados de la regresión estimada pueden no ser espurios y las pruebas "t" y "F" usuales son válidas. Como lo afirma Granger: "Una prueba de cointegración puede ser considerada como una prueba previa para evitar situaciones de regresión espuria". Por ejemplo: Se tiene las series anuales (1936-1972) del PNB nominal en Estados Unidos (datos en miles de millones de dólares), y de la Incidencia del melanoma en la población masculina (datos ajustados de edad) en el estado de Connecticut.
Observando los gráficos, ambas series mantienen una relación lineal.
0
200
400
600
800
0
1
2
3
4
5
6
1940 1945 1950 1955 1960 1965 1970
GNP MELANOMA
100
200
300
400
500
600
700
800
0 1 2 3 4 5 6
MELANOMA
GN
P
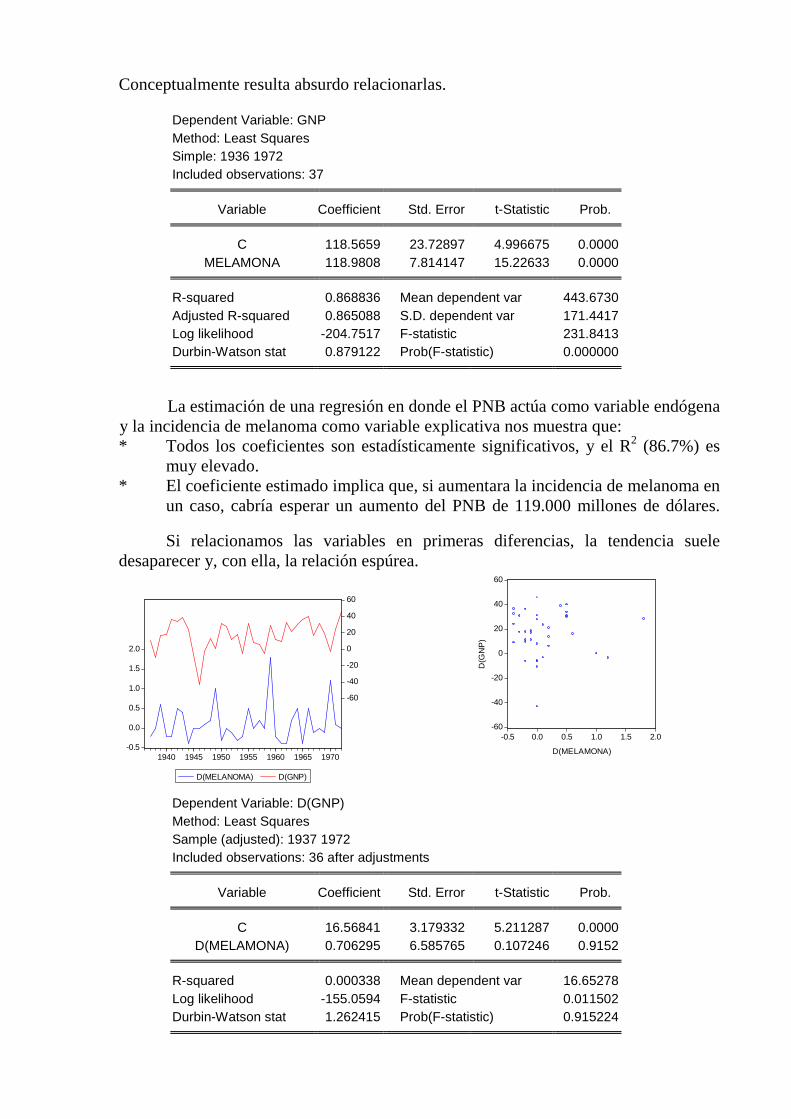
Conceptualmente resulta absurdo relacionarlas.
Dependent Variable: GNP Method: Least Squares Simple: 1936 1972 Included observations: 37
Variable Coefficient Std. Error t-Statistic Prob. C 118.5659 23.72897 4.996675 0.0000
MELAMONA 118.9808 7.814147 15.22633 0.0000 R-squared 0.868836 Mean dependent var 443.6730
Adjusted R-squared 0.865088 S.D. dependent var 171.4417 Log likelihood -204.7517 F-statistic 231.8413 Durbin-Watson stat 0.879122 Prob(F-statistic) 0.000000
La estimación de una regresión en donde el PNB actúa como variable endógena
y la incidencia de melanoma como variable explicativa nos muestra que: * Todos los coeficientes son estadísticamente significativos, y el R2 (86.7%) es
muy elevado. * El coeficiente estimado implica que, si aumentara la incidencia de melanoma en
un caso, cabría esperar un aumento del PNB de 119.000 millones de dólares.
Si relacionamos las variables en primeras diferencias, la tendencia suele desaparecer y, con ella, la relación espúrea.
Dependent Variable: D(GNP) Method: Least Squares Sample (adjusted): 1937 1972 Included observations: 36 after adjustments
Variable Coefficient Std. Error t-Statistic Prob. C 16.56841 3.179332 5.211287 0.0000
D(MELAMONA) 0.706295 6.585765 0.107246 0.9152 R-squared 0.000338 Mean dependent var 16.65278
Log likelihood -155.0594 F-statistic 0.011502 Durbin-Watson stat 1.262415 Prob(F-statistic) 0.915224
-0.5
0.0
0.5
1.0
1.5
2.0
-60
-40
-20
0
20
40
60
1940 1945 1950 1955 1960 1965 1970
D(MELANOMA) D(GNP)
-60
-40
-20
0
20
40
60
-0.5 0.0 0.5 1.0 1.5 2.0
D(MELAMONA)
D(G
NP
)
Consecuentemente, la relación de regresión entre las variables transformadas no resulta significativa
1.2. TIPOS DE PREDICCIONES
Según el horizonte de predicción se clasifican:
1 º Inmediato, hasta 3 mese, para decisiones operativas, control presupuestario. Por ejemplo: gestión de inventarios en establecimientos detallistas.
2º Corto Plazo de 3 a 12 meses, para tomar las decisiones operativas, control
presupuestario o decisiones de compra. Por ejemplo: Compra de bienes de temporada para venta al por menor.
3º Medio Plazo, comprendidas entre 1 y 3 años, para las decisiones estratégicas.
Por ejemplo: Leasing de plantas y equipos, formación de empleados para nuevos procesos.
4º Largo Plazo, de 3 a 10 años, para las decisiones estratégicas incluyendo las de
expansión. Por ejemplo: investigación y desarrollo, compra de activos, adquisiciones y absorciones.
5º Muy Largo Plazo, mayor a 10 años, para las decisiones estratégicas incluyendo
aquellas de cambio de las características principales de la empresa. Por ejemplo: predicción tecnológica en apoyo de investigación y desarrollo y planificación estratégica.
1.3. CLASIFICACIÓN DE LAS TÉCNICAS DE PREVISIÓ N
1º Históricas, la evolución de una magnitud tiene inercia temporal, lo que permite construir un modelo basado en el análisis de series temporales.
2º Causales, se basa en la interrelación entre varias variables; en un modelo
econométrico o en un modelo de variables latentes, algunas magnitudes son causa de las variaciones de otras, y se pueden usar como predictores.
3º Otros, como las encuestas de opinión a expertos, método Delphi, previsiones
por consumo y otras técnicas subjetivas. 1.4. TIPO DE PREVISIÓN DE LOS MODELOS
Según a las situaciones a las que se aplican tenemos: 1º Medios Escasos:
Corto Plazo.- La técnica de alisado exponencial, Medias móviles, Modelos Naïve y Desestacionalización.
Medio Plazo.- Ajuste de tendencia.

Largo plazo.- Curva en S. 2º Medios Normales:
Corto Plazo.- ARIMA univariante, análisis de intervención, X-11 ARIMA y Funciones de transferencia.
Medio Plazo.- Modelos econométricos uniecuacionales, modelos econométricos de pequeño tamaño y Modelos VAR.
Largo plazo.- Modelos con cambio estructural. 3º Medios Altamente Profesionalizados:
Corto Plazo.- Análisis espectral, Modelos dinámicos y Filtros. Medio Plazo.- Modelos multiecuacionales de gran tamaño, Simulación y
Input/Output. Largo plazo.- Modelos con cambio estructural y Escenarios.
1.5. ANÁLISIS DE SERIES TEMPORALES
Una serie temporal está formada por un conjunto de observaciones medidas a lo largo del tiempo. Es frecuente que se observen varias magnitudes simultáneamente, en cuyo caso se tiene una serie temporal multivariante.
1.6. OBJETIVO DEL ANÁLISIS DE UNA SERIE TEMPO RAL
El objetivo básico perseguido al realizar el análisis de una serie temporal es la predicción, es decir, la extrapolación de valores futuros de la serie a partir de los datos disponibles.
Otro objetivo es la modelización, o conocimiento de la estructura temporal del proceso generador de los datos.
Un último objetivo es la actuación externa o control, sobre el sistema a partir de las predicciones sucesivas (éste es el caso típico de un proceso de control de calidad industrial o de servicios).
1.7. FORMAS DE ANÁLISIS DE UNA SERIE TEMPORAL
Una serie temporal se puede analizar:
1º En el dominio del tiempo, consiste en construir un modelo econométrico dependiente del tiempo.
2º En el dominio de las frecuencias, o análisis espectral, trata sobre la detección
de posibles componentes cíclicos y de la aportación que realizan las distintas frecuencias en la variabilidad de la serie. El análisis espectral no persigue la construcción de modelos de predicción, sino simplemente investigar la estructura interna del proceso estocástico generador de una serie.
1.8. MÉTODOS USADOS EN EL DOMINIO DEL TIEMPO
El análisis en el dominio temporal se realiza generalmente usando dos tipos de técnicas:
1º Los métodos clásicos, como los de regresión, alisado exponencial, o medias
móviles, empleados si el número de observaciones es pequeño (hasta 40).
2º Los métodos de Box y Jenkins o utilización de modelos ARIMA, si se dispone de suficiente material estadístico. Existen otros modelos derivados o relacionados con esta metodología.
1.9. TIPOS DE MODELOS DE SERIES TEMPORALES
En el enfoque inicialmente propuesto por Box y Jenkins, se suelen dividir cinco clases de modelos con un grado creciente de complejidad y que pueden denominarse:
1º Univariante,
Se enlaza con la más clásica tradición de tratamiento aislado de una
serie temporal, cuya evolución se explica por los valores pasados de dicha serie y un cierto término de error. Es decir:
2º Función de transferencia,
La función de transferencia del filtro es el cociente de los dos
polinomiales de retardos definidos, , de la siguiente forma:
Con los mismos polinomiales de retardos definidos, de orden p y q, entonces puede definirse el modelo (simple) de función de transferencia, con ruido, como:
donde Yt puede interpretarse, a su vez, como la salida de dos filtros lineales,
uno sobre la variable de input y otro sobre la componente de ruido.
( ) ( )Φ Β Θ ΒY ut t=
( )( )
Θ ΒΦ Β
( )( )Y ut t=
Θ ΒΦ Β
( )( )
( )( )Y X ut
j
jj
K
jt t= +=∑
ωδ
ΒΒ
Θ ΒΦ Β1

Generalizando al caso de más de una variable explicativa, con K cocientes distintos de polinomiales de retardos, uno por cada input; es:
3º Intervención,
Cuando en el modelo de función de transferencia las variablesX jt son
ficticias.
4º Multivariantes, Se trata de modelos de varias variables de salida, considerando que
todos los polinomiales pueden ser distintos (tanto en orden como en valor de
los parámetros) la expresión formal matricial condensada es: representando m ecuaciones en retardos sobre las m series temporales con
retardos también en m variables de error. Puede considerarse que los polinomiales en posiciones de diagonal
principal comienzan con la unidad, mientras que los restantes comienzan con una potencia de Β ; entonces cada uno de las ecuaciones se entiende que
explica el comportamiento de cada una de las variables Z jt
.
5º Funciones de transferencia mutlivariante,
Obtenido como generalización del modelo de función de transferencia
para un output único. Una posible expresión consiste en definir, para K variables de input
(exógenas) y G variables output (endógenas), la matriz ( )V Β de G x K
polinomiales del tipo ( )( )
ϖδ
ij
ij
ΒΒ
, así como las matrices m x n de polinomiales
( )Φ Β y ( )Θ Β para los términos de error, con lo que:
2º ANÁLISIS BÁSICO DE UNA SERIE DE TIEMPO
Definimos una serie temporal como un conjunto de mediciones de un determinado fenómeno repetidas de forma homogénea con una frecuencia
( ) ( )H Z F Ut tΒ Β=
( )( )
( )( )Y X ut t t= +
ωδ
ΒΒ
Θ ΒΦ Β
( ) ( ) ( )Y V X Ut t t= + −Β Φ Β Θ Β1
determinada. De forma genérica podemos representar una serie temporal de T observaciones como:
),......,,( 21 Tt YYYY =
Una primera aproximación al análisis de las series se puede conseguir mediante
las medidas clásicas de posición: la media, ∑=
=T
ttt Y
TY
1
1 y la desviación típica,
( )∑=
−=T
ttt YY
TDesY
1
21.
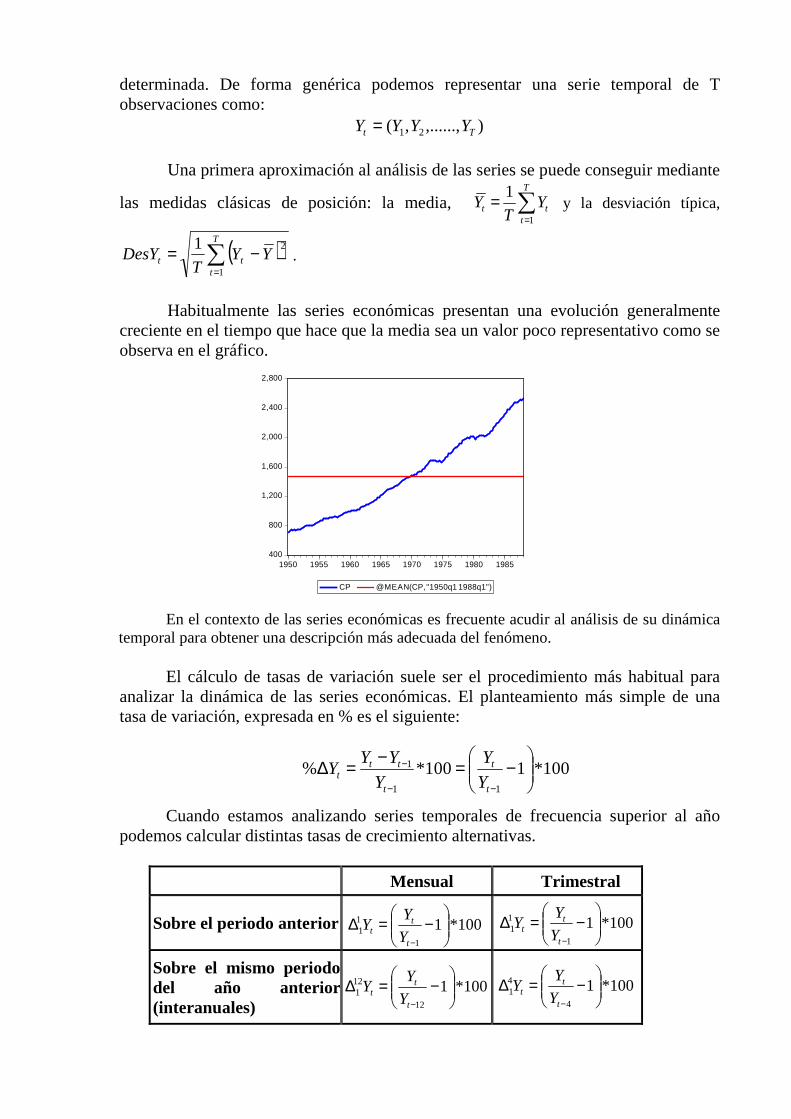
Habitualmente las series económicas presentan una evolución generalmente
creciente en el tiempo que hace que la media sea un valor poco representativo como se observa en el gráfico.
En el contexto de las series económicas es frecuente acudir al análisis de su dinámica
temporal para obtener una descripción más adecuada del fenómeno.
El cálculo de tasas de variación suele ser el procedimiento más habitual para analizar la dinámica de las series económicas. El planteamiento más simple de una tasa de variación, expresada en % es el siguiente:
Cuando estamos analizando series temporales de frecuencia superior al año podemos calcular distintas tasas de crecimiento alternativas.
Mensual Trimestral
Sobre el periodo anterior
Sobre el mismo periodo del año anterior (interanuales)
400
800
1,200
1,600
2,000
2,400
2,800
1950 1955 1960 1965 1970 1975 1980 1985
CP @MEAN(CP,"1950q1 1988q1")
100*1100*%11
1
−=−=∆
−−
−
t
t
t
ttt Y
Y
Y
YYY
100*11
11
−=∆
−t
tt Y
YY 100*1
1
11
−=∆
−t
tt Y
YY
100*112
121
−=∆
−t
tt Y
YY 100*1
4
41
−=∆
−t
tt Y
YY
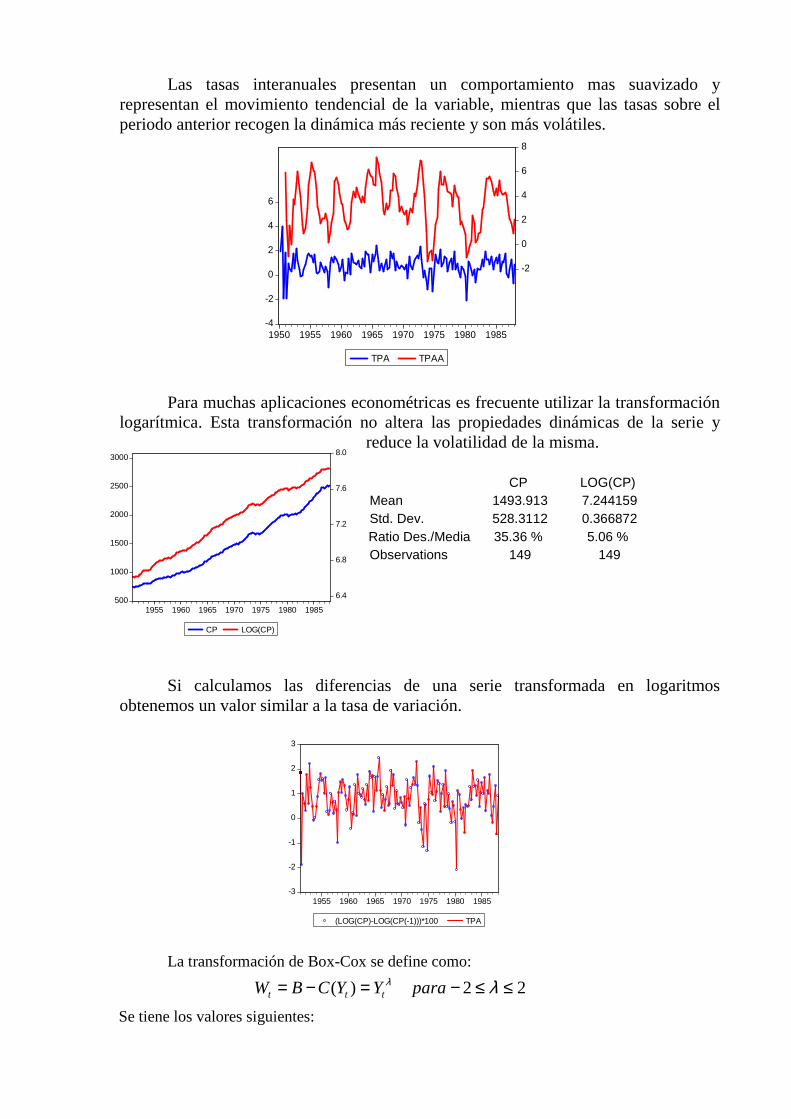
Las tasas interanuales presentan un comportamiento mas suavizado y representan el movimiento tendencial de la variable, mientras que las tasas sobre el periodo anterior recogen la dinámica más reciente y son más volátiles.
Para muchas aplicaciones econométricas es frecuente utilizar la transformación logarítmica. Esta transformación no altera las propiedades dinámicas de la serie y
reduce la volatilidad de la misma. CP LOG(CP)
Mean 1493.913 7.244159 Std. Dev. 528.3112 0.366872 Ratio Des./Media 35.36 % 5.06 % Observations 149 149
Si calculamos las diferencias de una serie transformada en logaritmos
obtenemos un valor similar a la tasa de variación.
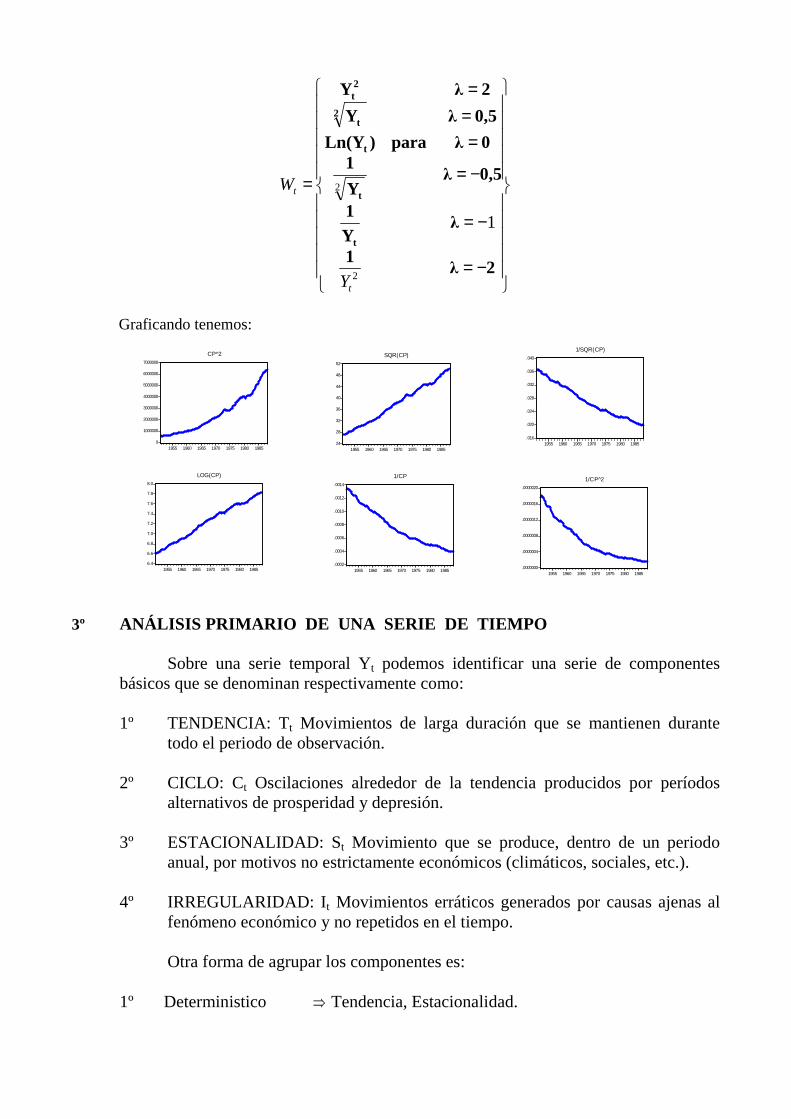
La transformación de Box-Cox se define como:
Se tiene los valores siguientes:
-4
-2
0
2
4
6
-2
0
2
4
6
8
1950 1955 1960 1965 1970 1975 1980 1985
TPA TPAA
-3
-2
-1
0
1
2
3
1955 1960 1965 1970 1975 1980 1985
(LOG(CP)-LOG(CP(-1)))*100 TPA
500
1000
1500
2000
2500
3000
6.4
6.8
7.2
7.6
8.0
1955 1960 1965 1970 1975 1980 1985
CP LOG(CP)
22)( ≤≤−=−= λλ paraYYCBW ttt
−=
−=
−=
===
=
2λ1
λY1
0,5λY
10λpara)Ln(Y
0,5λY
2λY
t
t
t
2t
2t
2
2
1
t
t
Y
W
Graficando tenemos:
3º ANÁLISIS PRIMARIO DE UNA SERIE DE TIEMPO
Sobre una serie temporal Yt podemos identificar una serie de componentes básicos que se denominan respectivamente como: 1º TENDENCIA: Tt Movimientos de larga duración que se mantienen durante
todo el periodo de observación.
2º CICLO: Ct Oscilaciones alrededor de la tendencia producidos por períodos alternativos de prosperidad y depresión.
3º ESTACIONALIDAD: St Movimiento que se produce, dentro de un periodo
anual, por motivos no estrictamente económicos (climáticos, sociales, etc.).
4º IRREGULARIDAD: It Movimientos erráticos generados por causas ajenas al fenómeno económico y no repetidos en el tiempo.
Otra forma de agrupar los componentes es:
1º Deterministico ⇒ Tendencia, Estacionalidad.
0
1000000
2000000
3000000
4000000
5000000
6000000
7000000
1955 1960 1965 1970 1975 1980 1985
CP^2
24
28
32
36
40
44
48
52
1955 1960 1965 1970 1975 1980 1985
SQR(CP)
6.4
6.6
6.8
7.0
7.2
7.4
7.6
7.8
8.0
1955 1960 1965 1970 1975 1980 1985
LOG(CP)
.016
.020
.024
.028
.032
.036
.040
1955 1960 1965 1970 1975 1980 1985
1/SQR(CP)
.0002
.0004
.0006
.0008
.0010
.0012
.0014
1955 1960 1965 1970 1975 1980 1985
1/CP
.0000000
.0000004
.0000008
.0000012
.0000016
.0000020
1955 1960 1965 1970 1975 1980 1985
1/CP^2

2º Modelable ⇒ Es posible hacer un modelo para reproducir una estructura. El componente modelable es estocástico.
3º Irregulares ⇒ Error, no se puede modelar ni deterministicamente ni
estocásticamente.
Podemos plantear diferentes esquemas alternativos de descomposición de una serie temporal:
1º ADITIVO:
2º MULTIPLICATIVO:
3º MIXTO:
Generalmente, el proceso de descomposición de una serie se realiza, en el enfoque clásico, mediante un proceso secuencial de identificación y separación de componentes.
Por regla general el orden en el que se van identificando los sucesivos
componentes es el siguiente (para estructura aditiva):
1º Estacionalidad 2º Tendencia 3º Ciclo 4º Componente irregular
3.1. DESESTACIONALIZACIÓN
Es frecuente antes de aplicar un proceso de desestacionalización realizar un análisis de LABORALIDAD y efecto PASCUA (Semana Santa). * LABORALIDAD: Corrección de los datos originales en función del número de días
laborables de cada mes. Por ejemplo, una serie mensual se puede homogeneizar a meses de 30 días, multiplicando los datos de enero por 30/31, los de febrero por 30/28 o por 30/29 si el año es bisiesto, etc. En este tratamiento previo, se aconseja realizar un gráfico temporal de la serie.
* Efecto PASCUA: Corrección que se aplica a los meses de Abril o Marzo en función
de las fechas de Semana Santa.
ttttt ISCTY +++=
ttttt ISCTY ***=
ttttt ISCTY +++= )1(*)1(*
)(ˆtt YfS =
ttt SYY ˆ1 −=
)(ˆ 1tt YfT = ttt TYY ˆ12 −=
)(ˆ 2tt YfC =
ttt CYI ˆ2 −=
A las series de las que se han eliminado estos efectos se les denomina SERIES
CORREGIDAS DE CALENDARIO. Las series temporales de datos económicos presentan generalmente características estacionales cuando se observan a una frecuencia inferior a la anual, ya sea mediante datos trimestrales, mensuales, bimestrales o semanales.
Estas características se deben a que las decisiones tomadas por los agentes económicos en un determinado trimestre (bimestre, mes, o semana) del año puede estar correlacionado con las decisiones tomadas en el mismo trimestre (bimestre, mes o semana) de otros años.
La identificación del elemento estacional es importante cuando el objetivo es explicar el comportamiento de la variable endógena, dado que una parte de las fluctuaciones de esta se manifiesta por el solo hecho de encontrarse en una época del año.
También es importante cuando el objetivo es predecir, puesto que las diferencias estacionales motivan que aun siendo idénticos los valores de las variables exógenas en cada parte del año se deberá predecir diferentes valores para la variable endógena.
Este fenómeno se puede detectar:
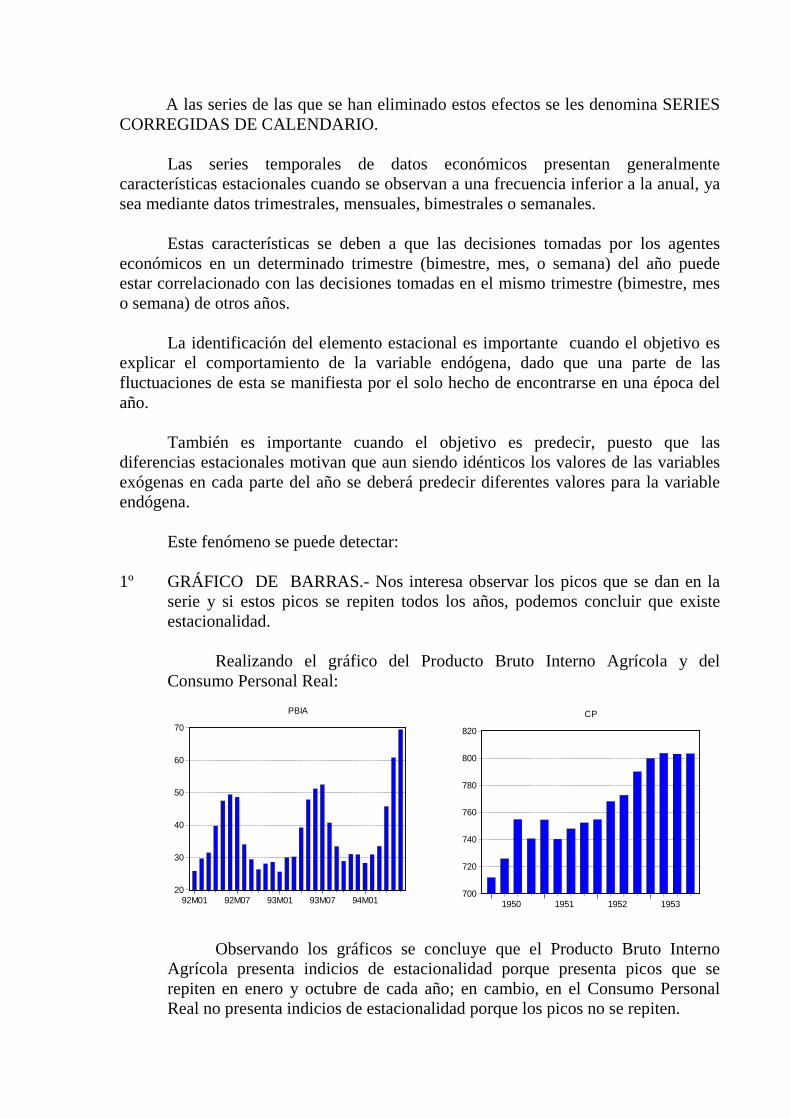
1º GRÁFICO DE BARRAS.- Nos interesa observar los picos que se dan en la
serie y si estos picos se repiten todos los años, podemos concluir que existe estacionalidad.
Realizando el gráfico del Producto Bruto Interno Agrícola y del
Consumo Personal Real:
Observando los gráficos se concluye que el Producto Bruto Interno Agrícola presenta indicios de estacionalidad porque presenta picos que se repiten en enero y octubre de cada año; en cambio, en el Consumo Personal Real no presenta indicios de estacionalidad porque los picos no se repiten.
20
30
40
50
60
70
92M01 92M07 93M01 93M07 94M01
PBIA
700
720
740
760
780
800
820
1950 1951 1952 1953
CP
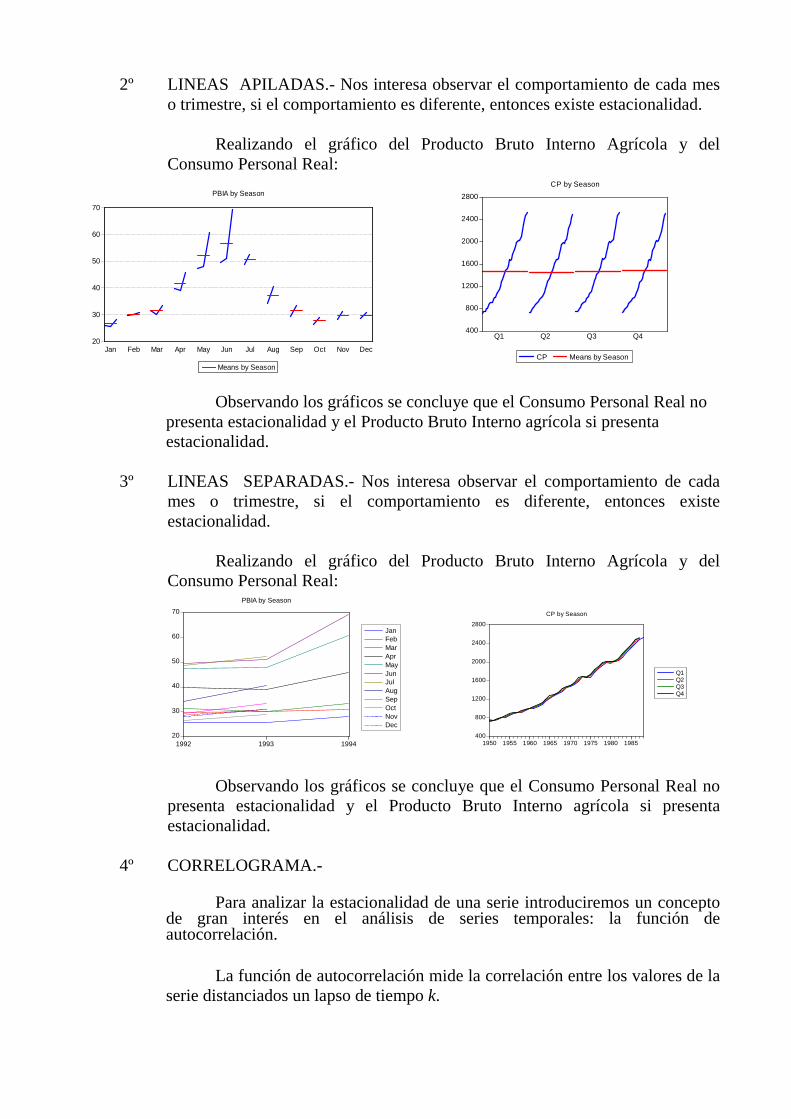
2º LINEAS APILADAS.- Nos interesa observar el comportamiento de cada mes o trimestre, si el comportamiento es diferente, entonces existe estacionalidad.
Realizando el gráfico del Producto Bruto Interno Agrícola y del
Consumo Personal Real:
Observando los gráficos se concluye que el Consumo Personal Real no presenta estacionalidad y el Producto Bruto Interno agrícola si presenta estacionalidad.
3º LINEAS SEPARADAS.- Nos interesa observar el comportamiento de cada
mes o trimestre, si el comportamiento es diferente, entonces existe estacionalidad.
Realizando el gráfico del Producto Bruto Interno Agrícola y del
Consumo Personal Real:
Observando los gráficos se concluye que el Consumo Personal Real no
presenta estacionalidad y el Producto Bruto Interno agrícola si presenta estacionalidad.
4º CORRELOGRAMA.-
Para analizar la estacionalidad de una serie introduciremos un concepto de gran interés en el análisis de series temporales: la función de autocorrelación.
La función de autocorrelación mide la correlación entre los valores de la serie distanciados un lapso de tiempo k.
20
30
40
50
60
70
Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec
Means by Season
PBIA by Season
20
30
40
50
60
70
1992 1993 1994
JanFebMarAprMayJunJulAugSepOctNovDec
PBIA by Season
400
800
1200
1600
2000
2400
2800
CP Means by Season
Q1 Q2 Q3 Q4
CP by Season
400
800
1200
1600
2000
2400
2800
1950 1955 1960 1965 1970 1975 1980 1985
Q1Q2Q3Q4
CP by Season

La función de autocorrelación es el conjunto de coeficientes de autocorrelación rk desde 1 hasta un máximo que no puede exceder la mitad de los valores observados, y es de gran importancia para estudiar la estacionalidad de la serie, ya que si ésta existe, los valores separados entre sí por intervalos iguales al periodo estacional deben estar correlacionados de alguna forma. Es decir que el coeficiente de autocorrelación para un retardo igual al periodo estacional debe ser significativamente diferente de 0.
Debemos obtener el correlograma considerando 25 retardos si la serie es
mensual, 9 retardos si la serie es trimestral, etc.. Se tiene que observar los picos que se dan en el correlograma y si estos picos se repiten en el mismo periodo en los siguientes años, podemos concluir que existe estacionalidad.
El correlograma del Producto Bruto Interno Agrícola se obtiene
siguiendo la instrucción siguiente:
Abrir el PBIA ⇒ View ⇒ Correlogram... ⇒ se marca level y se escribe
25 lag ⇒ OK y se muestra el siguiente resultado para el PBIA:
Sample: 1992M01 1995M12 Included observations: 30
Autocorrelation Partial Correlation AC PAC Q-Stat Prob . |***** | . |***** | 1 0.672 0.672 14.927 0.000
. |**. | ***| . | 2 0.234 -0.396 16.798 0.000 . *| . | .**| . | 3 -0.150 -0.222 17.596 0.001 ***| . | . *| . | 4 -0.350 -0.069 22.131 0.000 ***| . | . *| . | 5 -0.408 -0.141 28.534 0.000 ***| . | .**| . | 6 -0.398 -0.199 34.869 0.000 ***| . | . *| . | 7 -0.330 -0.127 39.414 0.000 .**| . | . *| . | 8 -0.247 -0.177 42.085 0.000 . | . | . |* . | 9 -0.024 0.160 42.112 0.000 . |**. | . |* . | 10 0.246 0.127 45.015 0.000 . |*** | . |* . | 11 0.458 0.115 55.594 0.000 . |**** | . | . | 12 0.484 0.031 68.113 0.000 . |*** | . | . | 13 0.330 0.001 74.278 0.000 . |* . | . | . | 14 0.095 -0.000 74.816 0.000 . *| . | . | . | 15 -0.133 -0.022 75.956 0.000 .**| . | . | . | 16 -0.245 0.045 80.088 0.000 .**| . | . | . | 17 -0.291 -0.023 86.322 0.000 .**| . | . | . | 18 -0.264 0.030 91.891 0.000 . *| . | . |* . | 19 -0.141 0.164 93.636 0.000 . | . | . *| . | 20 -0.027 -0.066 93.705 0.000 . | . | .**| . | 21 0.017 -0.216 93.735 0.000 . | . | . *| . | 22 0.047 -0.067 94.000 0.000 . | . | . *| . | 23 0.041 -0.186 94.235 0.000 . | . | . *| . | 24 0.000 -0.176 94.235 0.000 . | . | . | . | 25 0.000 0.033 94.235 0.000
Si observamos el correlograma del producto bruto interno agrícola se
visualiza que el pico del retardo 5 se repite en el retardo 17, por lo tanto, podemos concluir que el producto bruto interno agrícola es estacional.
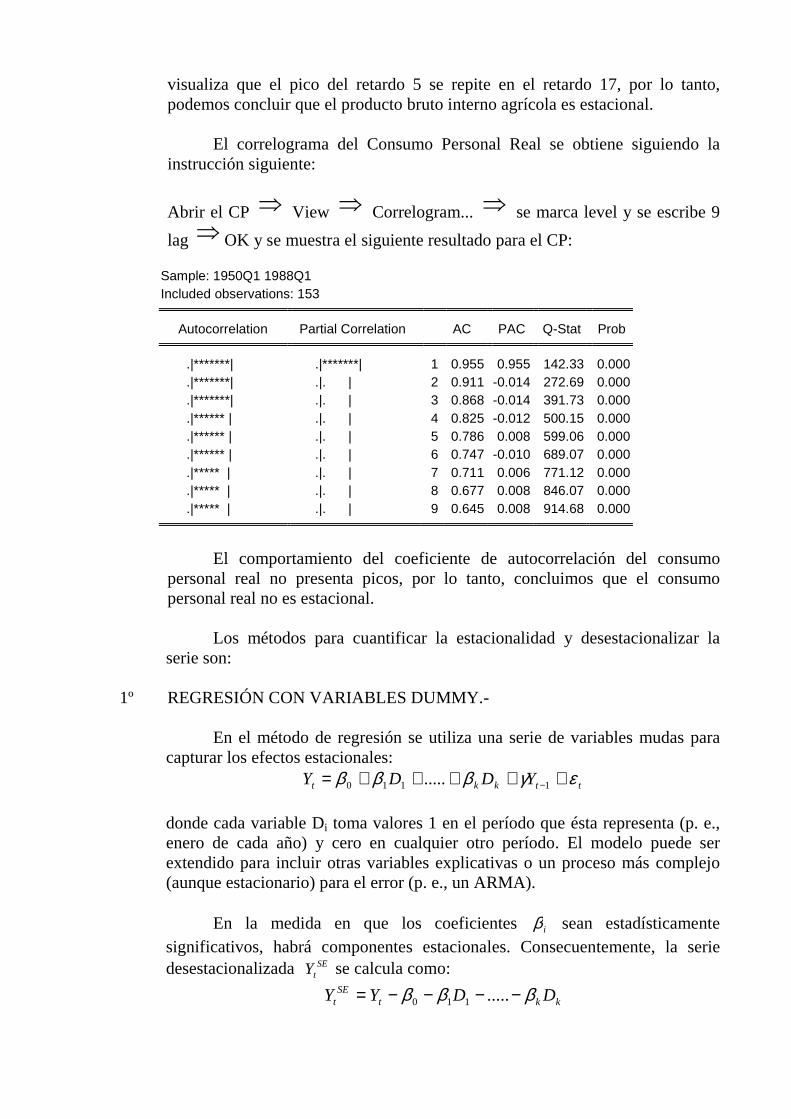
El correlograma del Consumo Personal Real se obtiene siguiendo la
instrucción siguiente:
Abrir el CP ⇒ View ⇒ Correlogram... ⇒ se marca level y se escribe 9
lag ⇒ OK y se muestra el siguiente resultado para el CP:
Sample: 1950Q1 1988Q1 Included observations: 153
Autocorrelation Partial Correlation AC PAC Q-Stat Prob .|*******| .|*******| 1 0.955 0.955 142.33 0.000
.|*******| .|. | 2 0.911 -0.014 272.69 0.000 .|*******| .|. | 3 0.868 -0.014 391.73 0.000 .|****** | .|. | 4 0.825 -0.012 500.15 0.000 .|****** | .|. | 5 0.786 0.008 599.06 0.000 .|****** | .|. | 6 0.747 -0.010 689.07 0.000 .|***** | .|. | 7 0.711 0.006 771.12 0.000 .|***** | .|. | 8 0.677 0.008 846.07 0.000 .|***** | .|. | 9 0.645 0.008 914.68 0.000
El comportamiento del coeficiente de autocorrelación del consumo personal real no presenta picos, por lo tanto, concluimos que el consumo personal real no es estacional.
Los métodos para cuantificar la estacionalidad y desestacionalizar la
serie son: 1º REGRESIÓN CON VARIABLES DUMMY.-
En el método de regresión se utiliza una serie de variables mudas para capturar los efectos estacionales:
ttkkt YDDY εγβββ +++++= −1110 ..... donde cada variable Di toma valores 1 en el período que ésta representa (p. e., enero de cada año) y cero en cualquier otro período. El modelo puede ser extendido para incluir otras variables explicativas o un proceso más complejo (aunque estacionario) para el error (p. e., un ARMA).
En la medida en que los coeficientes iβ sean estadísticamente
significativos, habrá componentes estacionales. Consecuentemente, la serie desestacionalizada SE
tY se calcula como:
kktSE
t DDYY βββ −−−−= .....110

donde iβ son los parámetros estimados para cada componente estacional que resulten significativos.
Como es evidente, al modelar la estacionalidad de esta manera se asume
que el efecto estacional sea determinístico (o constante en valor esperado), es decir, que en cada año el cambio en la variable por razones estacionales sea exactamente el mismo. Ello no es un supuesto adecuado para muchas de las variables económicas debido a que el comportamiento estacional se determina por numerosas y muy heterogéneas fuentes, lo que sugiere que éste sea modelado como una variable aleatoria.
El uso de variables mudas para modelar estacionalidad en un análisis de
regresión presenta el problema de inducir correlaciones espurias entre las variables, en tanto que su uso para predecir variables en modelos de series de tiempo (p.e., ARIMA, VAR) produce predicciones fuera de muestra que son de peor calidad que las que se obtienen de otros métodos (X-11 o la variación en x-períodos), en especial en modelos multivariados.
No obstante, este método satisface algunas características que son
deseables en cualquier método de remoción de estacionalidad: que se preserve el promedio de la serie original, que los componentes estacionales sean ortogonales entre sí, y que al aplicar el método a la serie desestacionalizada no se obtengan nuevos factores estacionales (idempotencia).
Aplicando este método a la serie Consumo personal real tenemos:
Dependent Variable: CP Method: Least Squares Sample (adjusted): 1950Q2 1988Q1 Included observations: 152 after adjustments
Variable Coefficient Std. Error t-Statistic Prob. C 0.940573 3.380101 0.278268 0.7812
@SEAS(1) 2.577797 2.784144 0.925885 0.3560 @SEAS(2) 1.529906 2.784490 0.549438 0.5835 @SEAS(3) 4.609948 2.784212 1.655746 0.0999
CP(-1) 1.006017 0.001863 539.9100 0.0000 R-squared 0.999496 Mean dependent var 1479.040
En la regresión ninguna de las variables dummy son significativas, por lo tanto el consumo personal real no presenta estacionalidad.
En GRETL se obtiene el mismo resultado:

Modelo 1: MCO, usando las observaciones 1950:2-1988:1 (T = 152) Variable dependiente: CP
Coeficiente Desv. Típica Estadístico t Valor p Const 0,940573 3,3801 0,2783 0,78120 dq1 2,5778 2,78414 0,9259 0,35602 dq2 1,52991 2,78449 0,5494 0,58354 dq3 4,60995 2,78421 1,6557 0,09991 * CP_1 1,00602 0,0018633 539,9100 <0,00001 *** Media de la vble. dep. 1479,040 D.T. de la vble. dep. 533,5063 Suma de cuad. residuos 21648,89 D.T. de la regresión 12,13554 R-cuadrado 0,999496 R-cuadrado corregido 0,999483 F(4, 147) 72922,06 Valor p (de F) 3,0e-241 Log-verosimilitud -592,5497 Criterio de Akaike 1195,099 Criterio de Schwarz 1210,219 Crit. de Hannan-Quinn 1201,241 Rho 0,147941 h de Durbin 1,818406
Aplicándolo en Eviews para Producto bruto interno agrícola resulta:
Dependent Variable: PBIA Method: Least Squares Sample (adjusted): 1992M02 1994M06 Included observations: 29 after adjustments
Variable Coefficient Std. Error t-Statistic Prob. C -11.66865 3.817922 -3.056282 0.0075
@SEAS(1) -3.149474 1.741879 -1.808090 0.0894 @SEAS(2) 4.600756 1.631591 2.819797 0.0123 @SEAS(3) 1.089949 1.591708 0.684767 0.5033 @SEAS(4) 8.744458 1.611761 5.425405 0.0001 @SEAS(5) 5.446288 2.162990 2.517944 0.0228 @SEAS(6) -4.584691 3.175343 -1.443841 0.1681 @SEAS(7) -8.288786 3.077233 -2.693585 0.0160 @SEAS(8) -21.88337 3.103516 -7.051155 0.0000 @SEAS(9) -9.241514 1.983766 -4.658570 0.0003 @SEAS(10) -4.739175 1.756342 -2.698321 0.0158 @SEAS(11) 2.503367 1.757713 1.424218 0.1736
PBIA(-1) 1.402257 0.122378 11.45837 0.0000 R-squared 0.986385 Mean dependent var 37.99448
En la regresión, siete de las variables dummy son significativas, por lo tanto el Producto bruto interno agrícola presenta estacionalidad. Entonces se aplica el método aditivo para desestacionalizar.
2º MEDIA MÓVIL.- Se desestacionaliza transformando la serie original en la que
las nuevas observaciones para cada periodo son un promedio de las observaciones originales. El orden de la media móvil indica el número de observaciones a promediar.
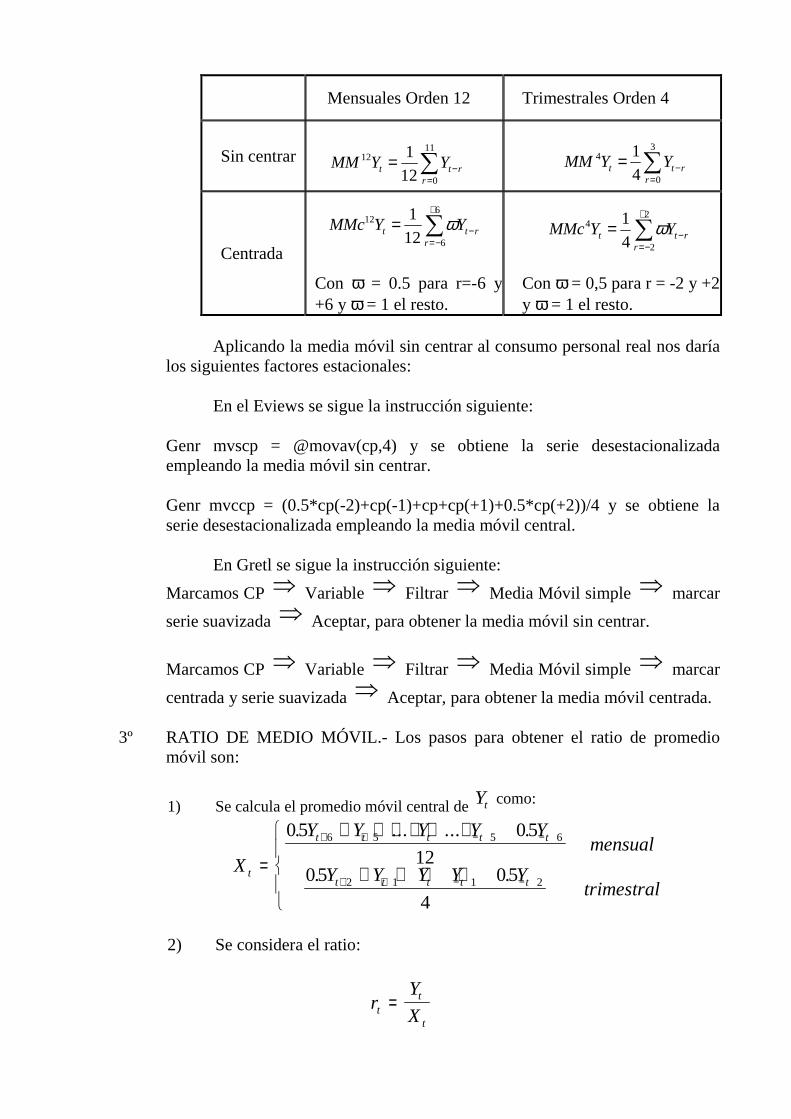
Mensuales Orden 12 Trimestrales Orden 4
Sin centrar
Centrada
Con ω = 0.5 para r=-6 y +6 y ω = 1 el resto.
Con ω = 0,5 para r = -2 y +2 y ω = 1 el resto.
Aplicando la media móvil sin centrar al consumo personal real nos daría
los siguientes factores estacionales: En el Eviews se sigue la instrucción siguiente:
Genr mvscp = @movav(cp,4) y se obtiene la serie desestacionalizada empleando la media móvil sin centrar. Genr mvccp = (0.5*cp(-2)+cp(-1)+cp+cp(+1)+0.5*cp(+2))/4 y se obtiene la serie desestacionalizada empleando la media móvil central.
En Gretl se sigue la instrucción siguiente:
Marcamos CP ⇒ Variable ⇒ Filtrar ⇒ Media Móvil simple ⇒ marcar
serie suavizada ⇒ Aceptar, para obtener la media móvil sin centrar.
Marcamos CP ⇒ Variable ⇒ Filtrar ⇒ Media Móvil simple ⇒ marcar
centrada y serie suavizada ⇒ Aceptar, para obtener la media móvil centrada.
3º RATIO DE MEDIO MÓVIL.- Los pasos para obtener el ratio de promedio móvil son:
1) Se calcula el promedio móvil central de Yt como:
2) Se considera el ratio:
∑=
−=11
0
12
12
1
rrtt YYMM ∑
=−=
3
0
4
4
1
rrtt YYMM
∑+
−=−=
6
6
12
12
1
rrtt YYMMc ω ∑
+
−=−=
2
2
4
4
1
rrtt YYMMc ω
X
Y Y Y Y Ymensual
Y Y Y Y Ytrimestral
t
t t t t t
t t t t t=
+ + + + + +
+ + + +
+ + − −
+ + − −
05 05
1205 05
4
6 5 5 6
2 1 1 2
. ... ... .
. .
rY
Xtt
t
=

3) Calculamos el índice estacional ( )im como el promedio del ratio de promedio
móvil para ese mes o trimestre en el periodo analizado.
1) El factor estacional es el ratio entre el índice estacional y la media geométrica de los índices estacionales, así:
En el Eviews se sigue la instrucción siguiente:
Abrir el CP ⇒ Proc ⇒ Seasonal Adjusment ⇒ se marca Ratio to moving
average - Multiplicative ⇒ OK y se muestra el siguiente resultado para el CP:
Sample: 1950Q1 1988Q1 Included observations: 153 Ratio to Moving Average Original Series: CP Adjusted Series: CPSA
Scaling Factors: 1 1.000019
2 0.999470 3 1.000848 4 0.999663
4º DIFERENCIA DE PROMEDIO MÓVIL.- Los pasos para obtener la diferencia
de promedio móvil son:
1.- Se calcula el promedio móvil central de Yt como:
2.- Se considera la diferencia:
3.- Calculamos el índice estacional ( )im como el promedio de la diferencia
d Y Xt t t= −
s
i
i i imensuales
i
i i i itrimestres
m
m=
1 2 1212
1 2 3 44
...
X
Y Y Y Y Ymensual
Y Y Y Y Ytrimestral
t
t t t t t
t t t t t=
+ + + + + +
+ + + +
+ + − −
+ + − −
05 05
1205 05
4
6 5 5 6
2 1 1 2
. ... ... .
. .

de promedio móvil para ese mes o trimestre en el periodo analizado. 4.- El factor estacional es la diferencia entre el índice estacional y el
promedio de los índices estacionales, así:
En el Eviews se sigue la instrucción siguiente:
Abrir el CP ⇒ Proc ⇒ Seasonal Adjusment ⇒ Difference from moving
average - Additive ⇒ OK y se muestra el siguiente resultado para el CP:
Sample: 1950Q1 1988Q1 Included observations: 153 Difference from Moving Average Original Series: CP Adjusted Series: CPSA1
Scaling Factors: 1 -0.132086
2 -0.941545 3 1.444906 4 -0.371275
5º ALISADO.- Las técnicas de alisado exponencial se utilizan en situaciones en
las que existen pocos datos (muestra pequeña), y si es necesario ir actualizando el modelo empleado cada vez que se obtiene un nuevo dato. Son muy simples en su aplicación pero limitados.
El Modelo de Holt-Winters, para series con tendencia polinomial, ciclo
estacional y componente aleatoria, tanto para tipo aditivo como multiplicativo.
El Alisado exponencial estacional con triple parámetro (Holt-Winters estacional-multiplicativo) es:
La predicción es:
Válido para series con tendencia lineal y estacionalidad. El factor
estacional no es fijo en el ajuste a periodo muestral.
s i ij j= −
( ) ( )( ) ( )
( ) st
t
tt
tttt
ttst
tt
sY
Ys
bYYb
bYs
YY
−
−−
−−−
−+=
−+−=
+−+=
δδ
ββ
αα
1ˆ
*1ˆˆ*
ˆ*1*ˆ
11
11
( ) kstttkt skbYY +−+ += **ˆˆ

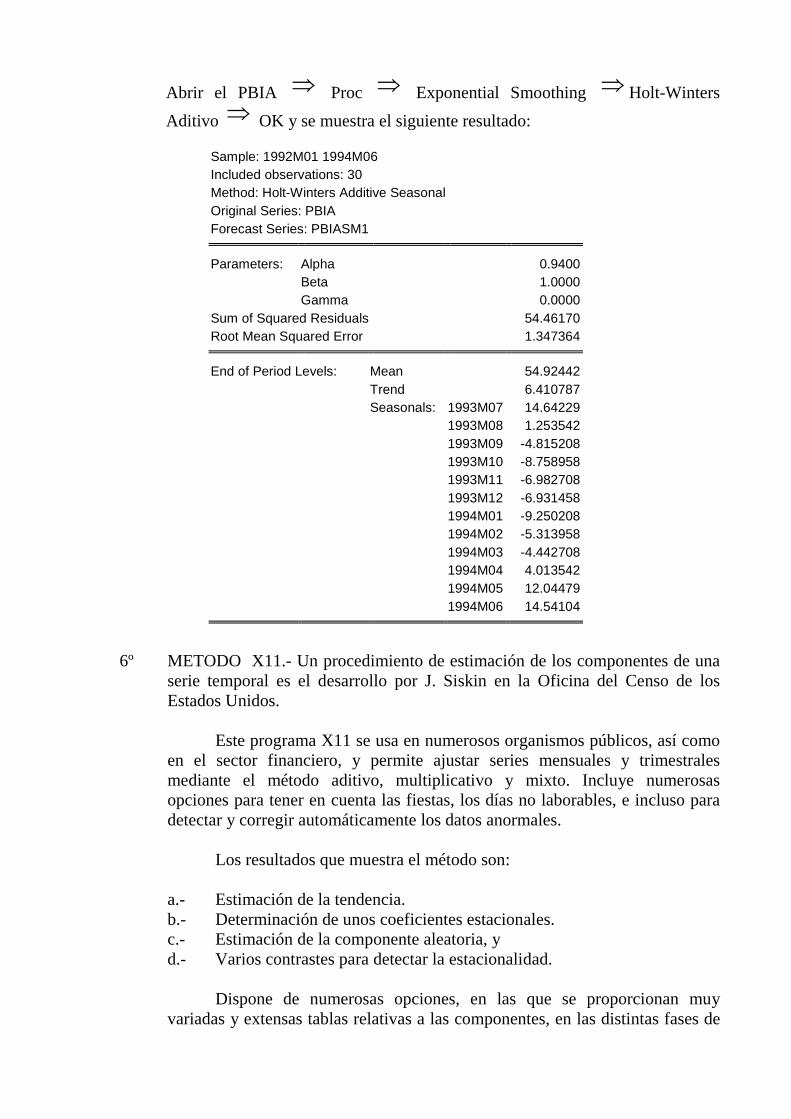
En el Eviews se sigue la instrucción siguiente:
Abrir el PBIA ⇒ Proc ⇒ Exponential Smoothing ⇒ Holt-Winters
Multiplicativo ⇒ OK y se muestra el siguiente resultado:
Sample: 1992M01 1994M06 Included observations: 30 Method: Holt-Winters Multiplicative Seasonal Original Series: PBIA Forecast Series: PBIASM
Parameters: Alpha 0.8700 Beta 1.0000 Gamma 0.0000
Sum of Squared Residuals 42.98890 Root Mean Squared Error 1.197065
End of Period Levels: Mean 49.38024 Trend 4.217104 Seasonals: 1993M07 1.406998 1993M08 1.032589 1993M09 0.865693 1993M10 0.758299 1993M11 0.807855 1993M12 0.810340 1994M01 0.735470 1994M02 0.848620 1994M03 0.874647 1994M04 1.113844 1994M05 1.338879 1994M06 1.406765
El Alisado exponencial estacional con triple parámetro (Holt-Winters
estacional-aditivo) es:
La predicción es:
Válido para series con tendencia lineal y estacionalidad. El factor
estacional no es fijo en el ajuste a periodo muestral. En el Eviews se sigue la instrucción siguiente:
( ) ( ) ( )( ) ( )( ) ( ) stttt
tttt
ttsttt
sYYs
bYYb
bYsYY
−
−−
−−−
−+−=
−+−=
+−+−=
δδ
ββ
αα
1ˆ*
*1ˆˆ*
ˆ*1*ˆ
11
11
kstttkt skbYY +−+ ++= *ˆˆ
Abrir el PBIA ⇒ Proc ⇒ Exponential Smoothing ⇒ Holt-Winters
Aditivo ⇒ OK y se muestra el siguiente resultado:
Sample: 1992M01 1994M06 Included observations: 30 Method: Holt-Winters Additive Seasonal Original Series: PBIA Forecast Series: PBIASM1
Parameters: Alpha 0.9400 Beta 1.0000 Gamma 0.0000
Sum of Squared Residuals 54.46170 Root Mean Squared Error 1.347364
End of Period Levels: Mean 54.92442 Trend 6.410787 Seasonals: 1993M07 14.64229 1993M08 1.253542 1993M09 -4.815208 1993M10 -8.758958 1993M11 -6.982708 1993M12 -6.931458 1994M01 -9.250208 1994M02 -5.313958 1994M03 -4.442708 1994M04 4.013542 1994M05 12.04479 1994M06 14.54104
6º METODO X11.- Un procedimiento de estimación de los componentes de una
serie temporal es el desarrollo por J. Siskin en la Oficina del Censo de los Estados Unidos.
Este programa X11 se usa en numerosos organismos públicos, así como
en el sector financiero, y permite ajustar series mensuales y trimestrales mediante el método aditivo, multiplicativo y mixto. Incluye numerosas opciones para tener en cuenta las fiestas, los días no laborables, e incluso para detectar y corregir automáticamente los datos anormales.
Los resultados que muestra el método son: a.- Estimación de la tendencia. b.- Determinación de unos coeficientes estacionales. c.- Estimación de la componente aleatoria, y d.- Varios contrastes para detectar la estacionalidad. Dispone de numerosas opciones, en las que se proporcionan muy
variadas y extensas tablas relativas a las componentes, en las distintas fases de
la estimación, ya que el procedimiento realiza varias iteraciones antes de estimar finalmente las componentes del modelo, incluido el modelo ARIMA para la componente aleatoria.
En unas iteraciones iniciales, se estiman las componentes de la serie y se
corrigen los datos en función de los días laborables (si se elige esta opción). Se identifican las observaciones extremas o anormales, y así se llega a unas estimaciones finales de las componentes.
En la primera iteración, con una media móvil centrada de amplitud 12,
se obtiene una estimación inicial de la tendencia y ciclo, eliminando variación estacional e irregular, que se estiman por diferencia o por cociente según el tipo de modelo.
En la segunda etapa, se aplican medias móviles a la serie que incluye las
componentes estacionales y la irregular, para estimar esta última, y se obtiene también su desviación típica mensual. De esta forma se estiman y corrigen los valores extremos, y con una nueva media móvil se estima la componente estacional. Los índices estacionales se usan para obtener una primera aproximación de la serie desestacionalizada, a partir de la cual, y mediante una media móvil ponderada, se obtienen una segunda estimación de las componentes agregadas de tendencia y ciclo no estacional.
El mismo procedimiento se utiliza para obtener una segunda estimación
de la serie desestacionalizada y de la componente irregular, que es de nuevo corregida en sus valores extremos o anormales.
En una tercera y última iteración, se estiman finalmente los índices
estacionales, y las componentes irregular y tendencial. En el Eviews se tiene: T representa la tendencia de la serie y los ciclos no estacionales. S componente estacional. I componente aleatoria o irregular. En el Eviews se sigue la instrucción siguiente:
Abrir el CP ⇒ Proc ⇒ Seasonal Adjusment ⇒ X11 (Historical) ⇒
Census X11-Multiplicative y se escribe en Factor: FEM ⇒ OK.
7º CENSUS X12-ARIMA.- es un programa de código abierto creado por el U.S. Census Bureau. Este es un programa de corrección estacional que incorpora algunas mejoras con respecto al programa X11-ARIMA (Statistics Canada) como el desarrollo de nuevas medidas de identificación de modelos y de diagnóstico de ajustes. Además es un programa de reajuste estacional. También el Census X12-
ARIMA es un método basado en promedios móviles, los cuales se sustentan en el dominio del tiempo o en el de frecuencias. Census X12-ARIMA logra el ajuste estacional con el desarrollo de un sistema de los factores que explican la variación estacional en una serie.
En años recientes, el Census X12-ARIMA ha adquirido relevancia en vista de que entre sus innovaciones se encuentran procedimientos basados en modelos (“model based”) como el Seats, el cual supone un modelo ARIMA para cada uno de los componentes de la serie de tiempo de interés. Específicamente, considera los modelos RegARIMA, los cuales son modelos de regresión cuyos errores siguen un proceso ARIMA. Por lo anterior, este programa es muy utilizado en varios bancos centrales, así como en varias oficinas de estadística como la de la Unión Europea (Eurostat) y la de Perú.
En el Eviews se sigue la instrucción siguiente:
Abrir el CP ⇒ Proc ⇒ Seasonal Adjusment ⇒ Census X12 ⇒ se marca Multiplicative, Final seasonally adjusted serie y Final seasonal factors ⇒ OK.
8º TRAMO/SEATS.- las siglas de Tramo significan “Time Series Regression with
ARIMA Noise, Missing Observations, and Outliers” y las de Seats “Signal Extraction in ARIMA Time Series”. Estos programas (que normalmente se usan juntos) han sido desarrollados por Víctor Gómez y Agustín Maravall del Banco de España.
Tramo es un programa para estimar y pronosticar modelos de regresión con errores posiblemente no estacionarios como los ARIMA (Autoregressive Integrated Moving Average) y cualquier serie de observaciones ausentes, también identifica y corrige observaciones atípicas como por ejemplo: el efecto Pascua, Calendario y el relacionado a formas de variables de intervención. El programa es eficiente en el ajuste estacional de series, y más en la extracción de señales estocásticas. El ajuste de la serie con el programa Tramo, corresponde al procedimiento que realizaba SCA (Scientific Computing Associates).
Seats es un programa para la estimación de los componentes no observados en series temporales, siguiendo el método “basado en modelos ARIMA”. Se estima y se obtienen predicciones de la tendencia, el componente estacional, el componente irregular y los componentes cíclicos. Además se obtienen los estimadores con error cuadrático medio mínimo (ECMM) de los componentes, así como sus predicciones también. Seats puede usarse para un análisis profundo de series o para aplicaciones rutinarias masivas. La estimación que realiza Seats corresponde a la metodología que llevaba a cabo X11- ARIMA.
Citando la descripción de Tramo/Seats dada en el sitio Web del Banco
de España1, “Los programas están dirigidos fundamentalmente al análisis de series temporales económicas y sociales, de frecuencia mensual o más baja.
Aunque están estructurados para satisfacer las necesidades de un analista experto, pueden utilizarse también de forma totalmente automática. Sus principales aplicaciones son predicción, ajuste estacional, detección y corrección de observaciones atípicas, estimación de efectos especiales, y control de calidad de los datos”.
En conjunto, Tramo/Seats realiza la estimación ARIMA y la
descomposición en componentes aditivos o multiplicativos; por lo que Tramo hace la estimación, mientras que Seats hace la descomposición. Asimismo se recomienda el uso de este programa para obtener un buen punto de partida al ajustar alguna serie.
En el Eviews se sigue la instrucción siguiente:
Abrir el CP ⇒ Proc ⇒ Seasonal Adjusment ⇒ Tramo/Seats ⇒ se
marca Seasonally adjusted y seasonal factor ⇒ OK.
3.2. TENDENCIA
Es un movimiento de larga duración que se mantiene durante el período de observación. Una primera idea sobre la presencia de tendencia en la serie la obtendremos en su representación gráfica.
En general es difícil diferenciar entre el componente tendencial y el cíclico y, habitualmente, se obtienen de forma conjunta eliminando de la serie desestacionalizada el componente irregular, obteniéndose una nueva serie denominada de CICLO-TENDENCIA. Se tiene los métodos siguientes: 1º MEDIA MÓVIL CENTRADA.- Una forma sencilla de eliminar el componente
irregular consiste en calcular una media móvil centrada de orden bajo (p.e. 3) sobre la serie previamente desestacionalizada.
El componente irregular se obtendría por diferencia (método aditivo) entre la serie desestacionalizada y la de Ciclo-Tendencia, así:
En el Eviews se sigue la instrucción siguiente:
Genr mvc3cp = (cp(-1)+cp+cp(+1))/3 y se obtiene el ciclo-tendencia siguiente:
∑+
−=−=
1
13
1
s
SEst
CTt YY
CTt
SEt
It YYY −=
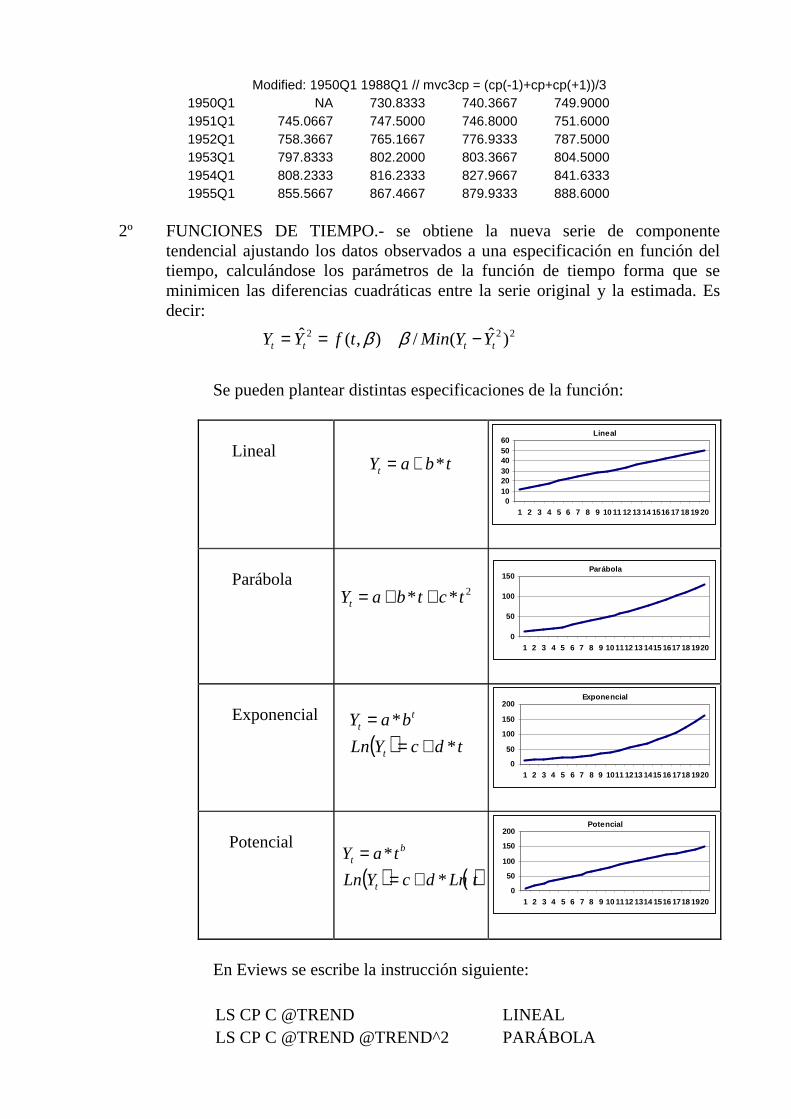
Modified: 1950Q1 1988Q1 // mvc3cp = (cp(-1)+cp+cp(+1))/3 1950Q1 NA 730.8333 740.3667 749.9000 1951Q1 745.0667 747.5000 746.8000 751.6000 1952Q1 758.3667 765.1667 776.9333 787.5000 1953Q1 797.8333 802.2000 803.3667 804.5000 1954Q1 808.2333 816.2333 827.9667 841.6333 1955Q1 855.5667 867.4667 879.9333 888.6000
2º FUNCIONES DE TIEMPO.- se obtiene la nueva serie de componente
tendencial ajustando los datos observados a una especificación en función del tiempo, calculándose los parámetros de la función de tiempo forma que se minimicen las diferencias cuadráticas entre la serie original y la estimada. Es decir:
Se pueden plantear distintas especificaciones de la función:
Lineal
Parábola
Exponencial
Potencial
En Eviews se escribe la instrucción siguiente:
LS CP C @TREND LINEAL LS CP C @TREND @TREND^2 PARÁBOLA
222 )ˆ(/),(ˆtttt YYMintfYY −== ββ
tbaYt *+=
Lineal
0102030405060
1 2 3 4 5 6 7 8 9 10 11 12 13 14 1516 17 18 19 20
2** tctbaYt ++=
Parábola
0
50
100
150
1 2 3 4 5 6 7 8 9 10 1112 13 1415 1617 18 1920
( ) tdcYLn
baY
t
tt
*
*
+==
Exponencial
0
50
100
150
200
1 2 3 4 5 6 7 8 9 1011 1213 1415 16 1718 1920
( ) ( )tLndcYLn
taY
t
bt
*
*
+==
Potencial
0
50
100
150
200
1 2 3 4 5 6 7 8 9 10 1112 1314 1516 1718 1920
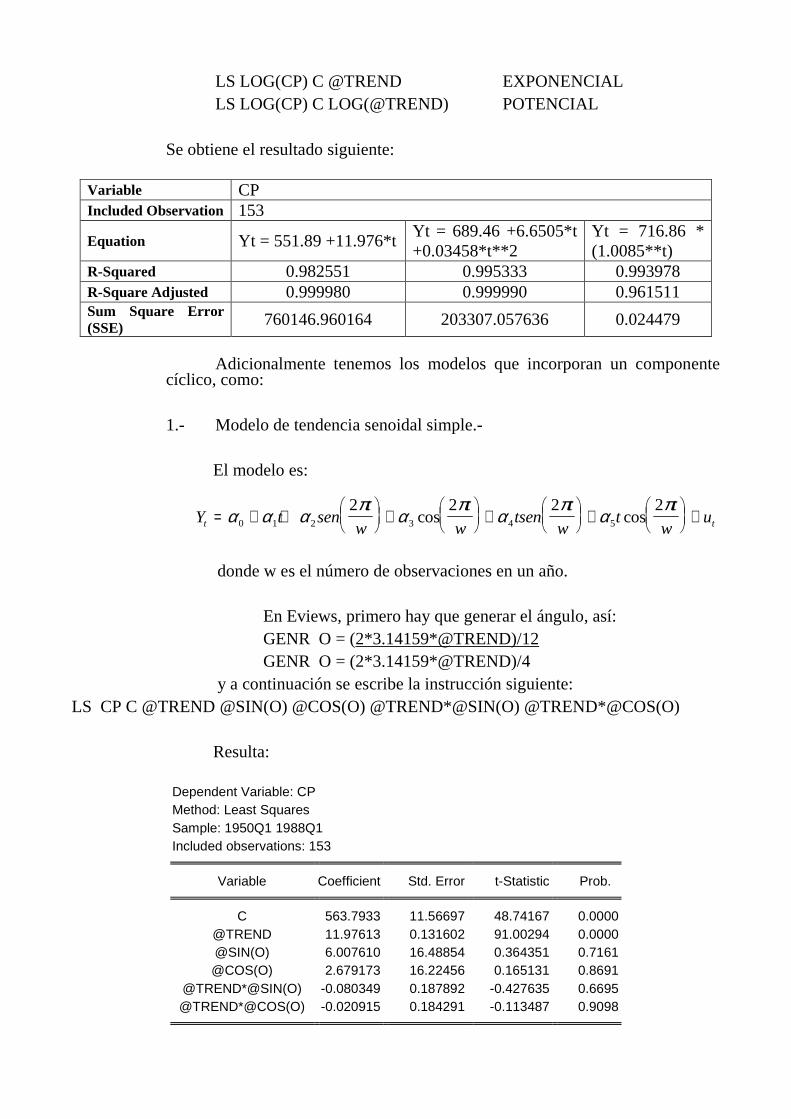
LS LOG(CP) C @TREND EXPONENCIAL LS LOG(CP) C LOG(@TREND) POTENCIAL
Se obtiene el resultado siguiente:
Variable CP Included Observation 153
Equation Yt = 551.89 +11.976*t Yt = 689.46 +6.6505*t +0.03458*t**2
Yt = 716.86 * (1.0085**t)
R-Squared 0.982551 0.995333 0.993978 R-Square Adjusted 0.999980 0.999990 0.961511 Sum Square Error (SSE) 760146.960164 203307.057636 0.024479
Adicionalmente tenemos los modelos que incorporan un componente
cíclico, como:
1.- Modelo de tendencia senoidal simple.-
El modelo es:
donde w es el número de observaciones en un año.
En Eviews, primero hay que generar el ángulo, así: GENR O = (2*3.14159*@TREND)/12 GENR O = (2*3.14159*@TREND)/4
y a continuación se escribe la instrucción siguiente: LS CP C @TREND @SIN(O) @COS(O) @TREND*@SIN(O) @TREND*@COS(O)
Resulta:
Dependent Variable: CP Method: Least Squares Sample: 1950Q1 1988Q1 Included observations: 153
Variable Coefficient Std. Error t-Statistic Prob. C 563.7933 11.56697 48.74167 0.0000
@TREND 11.97613 0.131602 91.00294 0.0000 @SIN(O) 6.007610 16.48854 0.364351 0.7161 @COS(O) 2.679173 16.22456 0.165131 0.8691
@TREND*@SIN(O) -0.080349 0.187892 -0.427635 0.6695 @TREND*@COS(O) -0.020915 0.184291 -0.113487 0.9098
Y t sent
w
t
wtsen
t
wt
t
wut t= + +
+
+
+
+α α α
πα
πα
πα
π0 1 2 3 4 5
2 2 2 2cos cos

R-squared 0.982576 Mean dependent var 1474.026 Adjusted R-squared 0.981984 S.D. dependent var 535.3530 S.E. of regression 71.85795 Akaike info criterion 11.42569 Sum squared resid 759044.1 Schwarz criterion 11.54453 Log likelihood -868.0650 F-statistic 1657.947 Durbin-Watson stat 0.033761 Prob(F-statistic) 0.000000
2.- Modelo de tendencia senoidal cuadrático.- El modelo es:
donde w es el número de observaciones en un año.
En Eviews, primero hay que generar el ángulo, así: GENR O = (2*3.14159*@TREND)/12 GENR O = (2*3.14159*@TREND)/4
y a continuación se escribe la instrucción siguiente: LS CP C @TREND @TREND^2 @SIN(O) @COS(O) @TREND*@SIN(O)
@TREND*@COS(O) @TREND^2*@SIN(O) @TREND^2*@COS(O)
Obteniendo:
Dependent Variable: CP Method: Least Squares Sample: 1950Q1 1988Q1 Included observations: 153
Variable Coefficient Std. Error t-Statistic Prob. C 696.2372 9.007112 77.29860 0.0000
@TREND 6.716405 0.273801 24.53023 0.0000 @TREND^2 0.034602 0.001744 19.84635 0.0000
@SIN(O) 0.011491 12.93618 0.000888 0.9993 @COS(O) -1.803156 12.52636 -0.143949 0.8857
@TREND*@SIN(O) 0.018841 0.393081 0.047933 0.9618 @TREND*@COS(O) 0.086830 0.380987 0.227907 0.8200 @TREND^2*@SIN(O) -0.000200 0.002504 -0.079986 0.9364 @TREND^2*@COS(O) -0.000709 0.002425 -0.292256 0.7705
R-squared 0.995339 Mean dependent var 1474.026
Adjusted R-squared 0.995080 S.D. dependent var 535.3530 S.E. of regression 37.55118 Akaike info criterion 10.14631 Sum squared resid 203053.1 Schwarz criterion 10.32457 Log likelihood -767.1926 F-statistic 3843.774 Durbin-Watson stat 0.104706 Prob(F-statistic) 0.000000
Y t t sent
w
t
wtsen
t
w
tt
wt sen
t
wt
t
wu
t
t
= + + +
+
+
+
+
+
+
α α α απ
απ
απ
απ
απ
απ
0 1 22
3 4 5
6 72
82
2 2 2
2 2 2
cos
cos cos

3º ALISADO.- Las técnicas de alisado exponencial se utilizan en situaciones en las que existen pocos datos, y si es necesario ir actualizando el modelo empleado cada vez que se obtiene un nuevo dato. Son muy simples en su aplicación pero limitados.
Alisado exponencial simple:
Predicción: Válido para series sin tendencia. La predicción no aporta información
adicional. En el Eviews se sigue la instrucción siguiente:
Abrir el PBIA ⇒ Proc ⇒ Exponential Smoothing ⇒ Single ⇒ OK y se muestra el siguiente resultado:
Sample: 1992M01 1994M06 Included observations: 30 Method: Single Exponential Original Series: PBIA Forecast Series: PBIASM
Parameters: Alpha 0.9990
Sum of Squared Residuals 1345.407 Root Mean Squared Error 6.696782
End of Period Levels: Mean 69.42131
Alisado exponencial doble (Brown): Predicción: Válido para series con tendencia lineal. La predicción es una recta con
ordenada en el origen y pendiente .
( )
( )∑−
=−
−
−=
−+=1
0
1
1*ˆ
ˆ*1*ˆ
N
sst
st
ttt
YY
YYY
αα
αα
0ˆˆ >∀=+ kYY tkt
( ) ( )( ) 1
1
11
ˆ*1ˆ*ˆ
ˆ*1*ˆ
−−+=
−+=
ttt
ttt
YYY
YYY
αα
αα
( ) ( )
( ) ( )
−−
+−=
=
−+−
−+=+
kYYYY
Yk
Yk
Y
tttt
ttkt
ˆˆ1
ˆˆ*2
ˆ*1
1ˆ*1
2ˆ
11
1
αα
αα
αα
tt YY ˆˆ*2 1 − ( ) ( )αα −− 1ˆˆ1tt YY

En el Eviews se sigue la instrucción siguiente:
Abrir el PBIA ⇒ Proc ⇒ Exponential Smoothing ⇒ Double ⇒ OK y se muestra el siguiente resultado:
Sample: 1992M01 1994M06 Included observations: 30 Method: Double Exponential Original Series: PBIA Forecast Series: PBIASM
Parameters: Alpha 0.8560
Sum of Squared Residuals 1320.795 Root Mean Squared Error 6.635247
End of Period Levels: Mean 69.53286 Trend 10.11279
El Alisado exponencial lineal con doble parámetro (Holt-Winters) es:
Los valores iniciales pueden ser:
La predicción es:
Válido para series con tendencia lineal. La predicción es una recta con ordenada en el origen y pendiente .
En el Eviews se sigue la instrucción siguiente:
Abrir el PBIA ⇒ Proc ⇒ Exponential Smoothing ⇒ Holt-Winters-No
Seasonal ⇒ OK y se muestra el siguiente resultado: Sample: 1992M01 1994M06 Included observations: 30 Method: Holt-Winters No Seasonal Original Series: PBIA Forecast Series: PBIASM
Parameters: Alpha 1.0000 Beta 0.8100
Sum of Squared Residuals 1002.241 Root Mean Squared Error 5.779969
End of Period Levels: Mean 69.43000 Trend 9.713274
( ) ( )( ) ( ) 11
11
*1ˆˆ*
ˆ*1*ˆ
−−
−−
−+−=
+−+=
tttt
tttt
bYYb
bYYY
ββ
αα
0;ˆ111 == bYY
( )12222 ;ˆ YYbYY −==
kbYY ttkt *ˆˆ +=+
1t̂Y tb
4º FILTRADO DE SERIES.- los medios más utilizados para detectar y eliminar la tendencia de una serie se basan en la aplicación de filtros a los datos. Un filtro no es más que una función matemática que aplicada a los valores de la serie produce una nueva serie con unas características determinadas.
Según Baxter y King, un método óptimo de extracción de ciclos
económicos debe cumplir con 6 objetivos:
• El filtro debe extraer un rango específico de periodicidades, sin variar sus propiedades inherentes (la varianza, correlaciones y otras medidas exploratorias de los datos).
• No debe producir un movimiento de fase (es decir, que no altere las relaciones temporales de las series a ninguna frecuencia). Este aspecto y el anterior definen un promedio móvil ideal, con ponderaciones simétricas para rezagos y adelantos.
• El método debe ser una aproximación óptima de un filtro ideal. Esto se puede determinar midiendo la diferencia de los resultados obtenidos con un filtro ideal y uno aproximado.
• La aplicación de un filtro debe producir una serie de tiempo estacionaria cuando se aplica a cifras que presentan tendencia.
• El método debe ser independiente de la longitud de la serie. • El método debe ser operacional, esto es, de fácil aplicación y uso.
Los requisitos para el filtro ideal conllevan el establecer un equilibrio
entre el estimar un filtro óptimo, lo cual implica agregar la mayor cantidad de rezagos y adelantos como explicativos de una variable y el perder observaciones al inicio y al final del período, lo cual reduce la cantidad de datos para el análisis. Los autores recomiendan utilizar como mínimo 6 años cuando se trabaja con datos trimestrales y anuales.
En la actualidad existen dos filtros:
1.- HODRICK-PRESCOTT.- partiendo del supuesto de que la serie está
compuesta por un componente tendencial más un componente cíclico, se obtiene la nueva serie de componente tendencial que sea “lo mas suave posible” (penalizándose con el parámetro λ la volatilidad de la nueva serie) y que minimize las diferencias cuadráticas frente a la serie original. Tendríamos:
Los propios autores proponen unos valores de λ para cada tipo de series: Anual = 100, Trimestral =:1600 y Mensual =14400.
En términos matriciales podemos expresar el problema de
minimización como: )ˆ()ˆ()ˆ()'ˆ( 2222
tttttt YAYAYYYYMin ′+−− λ
( ) ( ) ( )( )∑∑==
−+−−−+−=
N
t
N
ttt tttttt
YYYYYYMinYT2
22222
1
2212
11
ˆˆˆˆˆ/ˆ λ
Donde:
Igualando a cero la primera derivada y despejando la serie 2tY
obtenemos:
Posee una serie de características ideales según los criterios de
Baxter y King, por ejemplo: • Como el filtro es simétrico, no produce movimientos de fase. • Aproxima bien a un filtro ideal cuando se utiliza un 1600=λ para
datos trimestrales. • Produce series estacionarias, cuando éstas están integradas hasta el
orden cuarto. • El método es operacional.
Adolece de los problemas siguientes:
• Las ponderaciones van a depender del tiempo, por lo que el filtro dejará de ser independiente del largo de la serie.
• Por construcción el filtro no perderá ningún dato al inicio o al final de la serie. Sin embargo, las propiedades de la serie filtrada en puntos iniciales y finales es significativamente distinta de un filtro ideal, no así en los valores intermedios de la misma.
• Se relaciona con la elección un tanto arbitraria del parámetro λ . Para datos con periodicidad anual es una mala aproximación de un filtro ideal, por cuanto incluye comportamientos cíclicos que debería omitir y viceversa. Para datos anuales no existe consenso y la utilización del parámetro de suavización va desde λ = 10 hasta λ= 400.
En el Eviews se sigue la instrucción siguiente:
Abrir CP ⇒ Proc ⇒ Hodrick-Prescott Filter ⇒ OK y se muestra el siguiente resultado:
−
−−
−
=
2
23
22
21
2
ˆ
ˆ
ˆ
ˆ
*
12100000
00012100
00001210
00000121
ˆ
n
t
Y
Y
Y
Y
YA
M
L
MMMOMMMMM
L
L
L
112 )(ˆtt YAAIY −′+= λ

2.- BAXTER-KING.- su objetivo es encontrar un método útil para medir
ciclos económicos y que éste sea óptimo, por ejemplo, que cumpla con las especificaciones sobre ciclos asignadas por el investigador.
Su procedimiento se resume en dos pasos: primero se mide el
ciclo, para lo cual el investigador debe especificar ciertas características del mismo y posteriormente se le aísla, aplicando promedios móviles a los datos.
Desarrolla 3 tipos de filtro lineal: “low-pass”, “high-pass” y
“bandpass”. Un filtro de tipo “low-pass” sólo retendrá los componentes que se
mueven lento en los datos, esto es, que se producen con frecuencias muy bajas. Entre menor sea la frecuencia mayor va a ser la cantidad de períodos que abarca un ciclo.
Un filtro de tipo “high-pass” equivale a una frecuencia
relativamente alta, por lo que se espera que incluya elementos más frecuentes de la serie, como los irregulares o estacionales.
El filtro band-pass son los períodos mínimo y máximo a incluir en
el ciclo, es un tipo de construcción de promedios móviles que aísla los componentes periódicos de una serie de tiempo económica que cae en una banda de frecuencias específica.
La cantidad de rezagos a incluir en el filtro es muy importante,
por cuanto estos definen la precisión de los ponderadores. Según Baxter y King, no existe un número ideal de rezagos, pero sí ocurre que entre más rezagos se incorporen en el promedio móvil, mejor será la aproximación con el filtro ideal, a costa de una mayor pérdida de datos por encima y por debajo del valor de interés, aspecto que cobra mayor importancia al final de la serie. Por ello, la elección de k dependerá en gran medida de la cantidad de datos disponibles y de lo necesario que sea aproximar el filtro al ideal.
Este filtro cumple con la mayoría de las características:
-80
-40
0
40
80
500
1000
1500
2000
2500
3000
1950 1955 1960 1965 1970 1975 1980 1985
CP Trend Cycle
Hodrick-Prescott Filter (lambda=1600)

• es simétrico, por lo que no produce movimientos de fase. • aproxima relativamente bien un filtro ideal. • produce series estacionarias. • es un método operacional. • es superior a otros en la medida que permite introducir la definición
del investigador del ciclo económico y no produce variación en las propiedades de la variable al final de las series.
Habrá una pérdida de datos al inicio y al final de la serie igual a
dos veces la cantidad de rezagos que el investigador incluya. Se recomienda utilizar los siguientes valores de parámetros:
Series anuales upper =2 lower =8 nma =3 arpad =1 Series trimestrales upper =2 lower =32 nma =12 arpad =4 Series mensuales upper =2 lower =96 nma =12 arpad=12
Donde: Upper: número de períodos mínimos que se incluirán en el filtro,
correspondientes a frecuencias altas. Lower: número de períodos máximos que se incluirán en el filtro,
correspondientes a frecuencias bajas. Nma: número de promedios móviles (o rezagos ) del filtro. Arpad: número de parámetros autorregresivos que se utilizarán para
sustituir los valores que se pierden al final de la serie, por la aplicación de un promedio móvil truncado.
En el Eviews se sigue la instrucción siguiente:
Abrir CP ⇒ Proc ⇒ Frecuency Filter ⇒ Fixed length symmetric
(Baxter-King), lag = 12, low = 2, high = 32 ⇒ OK y se muestra el siguiente resultado:
3.- CHRISTIANO Y FITZGERALD.- es una variante al filtro Baxter-King, derivan una aproximación óptima cuando la representación de los datos tiene raíz unitaria o es estacionario alrededor de una tendencia. Asimismo, desarrollan una variante cuyas ponderaciones son diferentes para cada observación (asimétricas), la cual puede usarse para toda la muestra ya que no hay pérdida de observaciones.
-80
-40
0
40
80
500
1000
1500
2000
2500
3000
1950 1955 1960 1965 1970 1975 1980 1985
CP Non-cyclical Cycle
Fixed length symmetric (Baxter-King) filter
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
.0 .1 .2 .3 .4 .5
Actual Ideal
Frequency Response Function
cycles/period
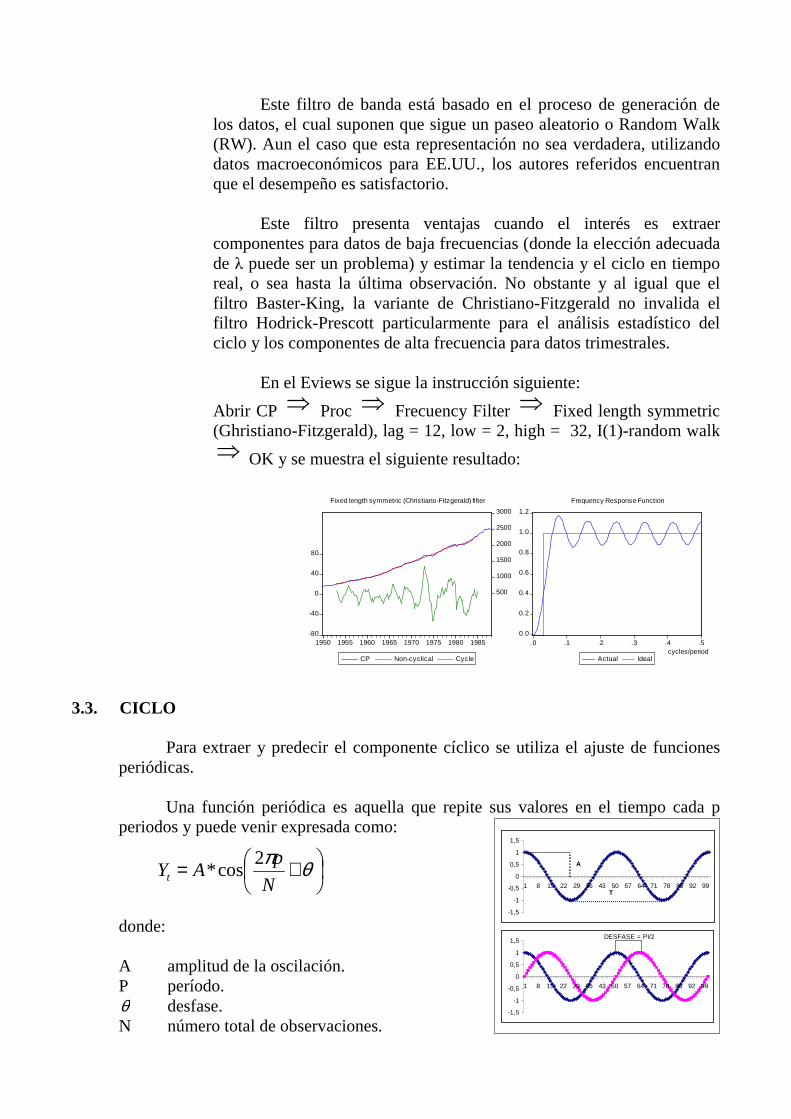
Este filtro de banda está basado en el proceso de generación de
los datos, el cual suponen que sigue un paseo aleatorio o Random Walk (RW). Aun el caso que esta representación no sea verdadera, utilizando datos macroeconómicos para EE.UU., los autores referidos encuentran que el desempeño es satisfactorio.
Este filtro presenta ventajas cuando el interés es extraer
componentes para datos de baja frecuencias (donde la elección adecuada de λ puede ser un problema) y estimar la tendencia y el ciclo en tiempo real, o sea hasta la última observación. No obstante y al igual que el filtro Baster-King, la variante de Christiano-Fitzgerald no invalida el filtro Hodrick-Prescott particularmente para el análisis estadístico del ciclo y los componentes de alta frecuencia para datos trimestrales.
En el Eviews se sigue la instrucción siguiente:
Abrir CP ⇒ Proc ⇒ Frecuency Filter ⇒ Fixed length symmetric (Ghristiano-Fitzgerald), lag = 12, low = 2, high = 32, I(1)-random walk ⇒ OK y se muestra el siguiente resultado:
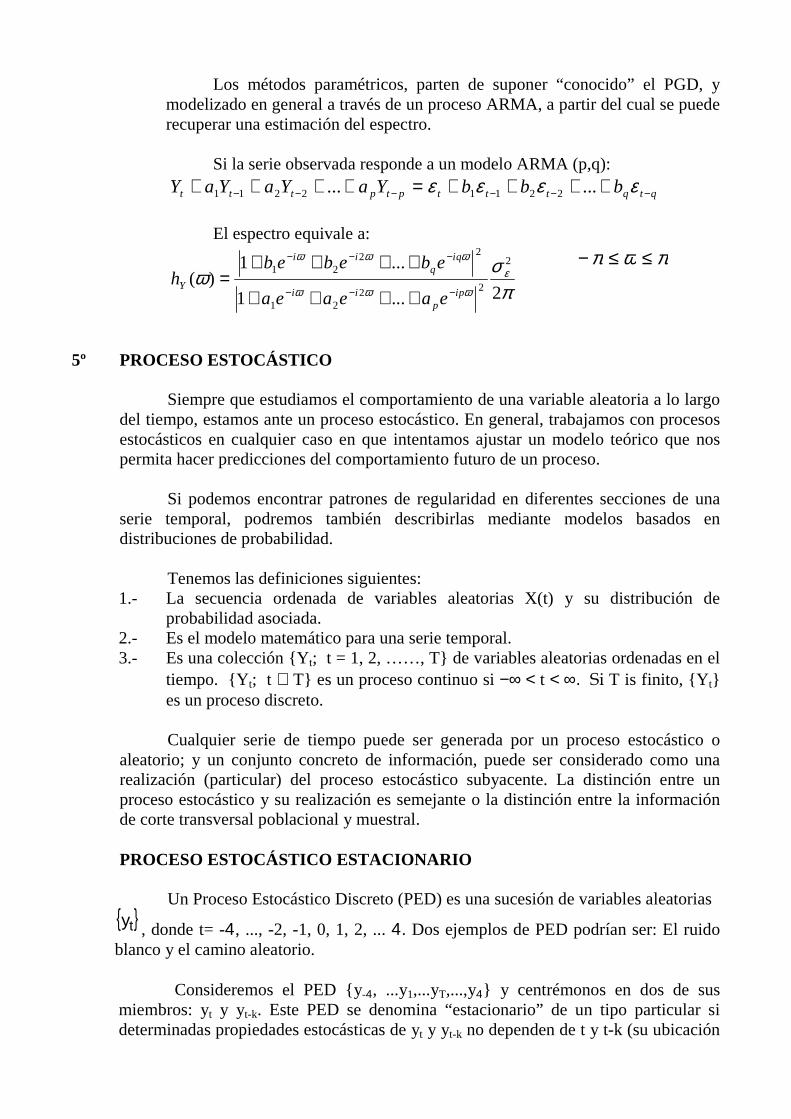
3.3. CICLO
Para extraer y predecir el componente cíclico se utiliza el ajuste de funciones periódicas.
Una función periódica es aquella que repite sus valores en el tiempo cada p
periodos y puede venir expresada como:
donde: A amplitud de la oscilación. P período. θ desfase. N número total de observaciones.
-80
-40
0
40
80
500
1000
1500
2000
2500
3000
1950 1955 1960 1965 1970 1975 1980 1985
CP Non-cyclical Cycle
Fixed length symmetric (Christiano-Fitzgerald) filter
0.0
0.2
0.4
0.6
0.8
1.0
1.2
.0 .1 .2 .3 .4 .5
Actual Ideal
Frequency Response Function
cycles/period
+= θπN
pAYt
2cos*
-1,5
-1
-0,5
0
0,5
1
1,5
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99
A
T
-1,5
-1
-0,5
0
0,5
1
1,5
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99
DESFASE = PI/2

A efectos de ajustar y predecir series cíclicas podemos utilizar la expresión
alternativa:
0ω es lo que se denomina frecuencia básica y es igual a N/*2 π .
Paso 1: Identificar el número de máximos (mínimos) cíclicos p y construir las series:
Paso 2: Ajustar mediante regresión el modelo:
Paso 3: Calcular los errores (residuos) y si tienen comportamiento cíclico repetir el proceso añadiendo nuevos términos al modelo.
Para determinar el valor del periodo p, podríamos utilizar, como primera aproximación, el número de máximos (o mínimos) locales que presenta la serie a analizar.
4º ANÁLISIS EN EL DOMINIO DE FRECUENCIAS
Una función periódica se repite transcurrido T (período), por lo tanto presentará la máxima correlación con el retardo T y sus múltiplos enteros. Puede demostrarse que la autocorrelación de una función periódica es periódica, del mismo período que dicha función. Veamos los gráficos:
Para visualizar la periodicidad de una serie, tenemos:
1.- EL PERIODOGRAMA.- se asimila a un “sintonizador” de un receptor de radio, así, la serie que observamos sería la señal emitida por una radio y el periodograma no sería más que el dial que busca en que frecuencia se “oye” mejor la señal emitida.
“Modelo” que sigue la serie observada:
)**(*)**cos(* 00 tpsentpYt ωβωα +=
)**/1416.3*2()**/1416.3*2cos( tpNsenSENPytpNCOSP tt ==
ttt SENPCOSPY ** 21 ββ +=
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
-40 -20 0 20 40
FUNCION DE AUTOCORRELACION
∑=
++=k
itiiipt tbtaY
1
)sencos( εωω
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
20 40 60 80 100 120 140 160 180 200
COS(2*PI*@TREND/(200/10))

Asumimos que las frecuencias, iω , denominadas Frecuencias de Fourier
son:
Los parámetros, a y b, se pueden estimar por MCO o bien, de forma
directa como: Se calcula el periodograma I(w):
El periodograma mide aportaciones a la varianza total de la serie de componentes periódicos de una frecuencia determinada (w). Si el periodograma presenta un “pico” en una frecuencia, indica que dicha frecuencia tiene mayor “importancia” en la serie que el resto.
De izquierda. a derecha. aumenta la frecuencia (disminuye el período):
N
pii
πω 2=
0
1
2
3
4
0 50 100 150
kpi ,...,1=( )
−=imparesNsiN
paresNsiNk
212
∑=
=N
t
t
N
Ya
10ˆ∑
=
=N
totp tpY
Na
1
cos2
ˆ ω ∑=
=N
totp tpY
Nb
1
sen2ˆ ω
0
22
2
)()(
ωω pp
p
baI
+=
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
20 40 60 80 100 120 140 160 180 200 -1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
20 40 60 80 100 120 140 160 180 200
Ciclo – Estacionalidad (Ciclo anual) Irregular Tendencia

El periodograma está basado en una herramienta matemática denominada Transformada de Fourier, según la cual una serie, que cumpla determinados requisitos, puede descomponerse como suma de un número finito o infinito de frecuencias. Del mismo modo, a partir de la representación frecuencial puede recuperarse la serie original a través de la Transformada Inversa de Fourier.
Las series periódicas presenta un periodograma discreto, es decir, solo
existe "masa" espectral en aquellas frecuencias contenidas en la serie, siendo éstas un número discreto.
Las series aperiódicas presentan un periodograma continúo, es decir,
existe "masa" en un "infinito" número de frecuencias.
Las series estocásticas presentan densidad espectral en un rango
continúo de frecuencias.
2.- EL ESPECTRO.- o densidad espectral se define para procesos estocásticos estacionarios como la transformada de Fourier de la función de autocovarianza (teorema de Wiener-Khintchine). Su estimador “natural” es el periodograma, antes visto. Como hemos comprobado es un instrumento adecuado para la detección de procesos periódicos puros, sin embargo en el caso de procesos estocásticos presenta serias limitaciones, las más importantes son la inconsistencia y la correlación asintóticamente nula entre ordenadas del periodograma. Esto implica que no converja al verdadero “espectro” cuando la muestra se amplia y que el periodograma muestre un comportamiento errático.
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
20 40 60 80 100 120 140 160 180 200
0
20
40
60
80
100
20 40 60 80 100 120 140 160 180 200
-3
-2
-1
0
1
2
3
20 40 60 80 100 120 140 160 180 200
0
5
10
15
20
0 50 100 150
FREC
PE
RD
G
0
2000
4000
6000
8000
10000
12000
0 50 100 150
FREC
PE
RD
G
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0 50 100 150
FREC
PERDG
Los métodos paramétricos, parten de suponer “conocido” el PGD, y modelizado en general a través de un proceso ARMA, a partir del cual se puede recuperar una estimación del espectro.
Si la serie observada responde a un modelo ARMA (p,q):
El espectro equivale a:
5º PROCESO ESTOCÁSTICO Siempre que estudiamos el comportamiento de una variable aleatoria a lo largo del tiempo, estamos ante un proceso estocástico. En general, trabajamos con procesos estocásticos en cualquier caso en que intentamos ajustar un modelo teórico que nos permita hacer predicciones del comportamiento futuro de un proceso. Si podemos encontrar patrones de regularidad en diferentes secciones de una serie temporal, podremos también describirlas mediante modelos basados en distribuciones de probabilidad. Tenemos las definiciones siguientes: 1.- La secuencia ordenada de variables aleatorias X(t) y su distribución de
probabilidad asociada. 2.- Es el modelo matemático para una serie temporal. 3.- Es una colección {Yt; t = 1, 2, ……, T} de variables aleatorias ordenadas en el
tiempo. {Yt; t ∈ T} es un proceso continuo si −∞ < t < ∞. Si T is finito, {Y t} es un proceso discreto.
Cualquier serie de tiempo puede ser generada por un proceso estocástico o aleatorio; y un conjunto concreto de información, puede ser considerado como una realización (particular) del proceso estocástico subyacente. La distinción entre un proceso estocástico y su realización es semejante o la distinción entre la información de corte transversal poblacional y muestral.
PROCESO ESTOCÁSTICO ESTACIONARIO
Un Proceso Estocástico Discreto (PED) es una sucesión de variables aleatorias { }ty , donde t= -4, ..., -2, -1, 0, 1, 2, ... 4. Dos ejemplos de PED podrían ser: El ruido blanco y el camino aleatorio.
Consideremos el PED {y-4, ...y1,...yT,...,y4} y centrémonos en dos de sus miembros: yt y yt-k. Este PED se denomina “estacionario” de un tipo particular si determinadas propiedades estocásticas de yt y yt-k no dependen de t y t-k (su ubicación
qtqtttptpttt bbbYaYaYaY −−−−−− ++++=++++ εεεε ...... 22112211
πσω ε
ωωω
ωωω
2...1
...1)(
2
2221
2221
ipp
ii
iqq
ii
Y
eaeaea
ebebebh
−−−
−−−
++++
++++=
πωπ ≤≤−

absoluta en la secuencia) pero dependen sólo de k (su separación relativa en la secuencia). Se tiene los tipos de estacionariedad siguiente:
1.- Estricta: Se verifica si las distribuciones de yt y yt-k (conjunta y marginal) no
dependen de t pero sólo de k.
Un proceso estocástico es estacionario en sentido estricto cuando su función de distribución conjunta es invariante respecto a un desplazamiento en el tiempo.
Considerando que t1; t2; .... ; tk corresponden a periodos sucesivos de tiempo que denominamos como t; t + 1;.. ; t + k, entonces:
);...;;();...;;( 1mt1t mktmtktt yyyfyyyf +++++++ =
2.-Débil: Se verifica cuando los dos primeros momentos de yt y yt-k dependen
posiblemente de k pero no de t, i.e. E(yt) = E(yt-k) y Var(yt) = Var(yt-k) y Cov(ytyt-k) depende posiblemente de k pero no de t.
[ ]( )
( ) ( )( ) ( )1 2 1 2
2
1 2,
t Y
t Y
t t t Y t Y
E Y
Var Y
COV Y Y E Y Y t t
µ
σ
µ µ λ
=
=
= − − = −
En el caso que las series sean estacionarias en el sentido débil, se podrán modelar a través de un conjunto de especificaciones conocidas como los modelos AR, MA y ARMA. El objetivo de los mismos es explicar el componente cíclico de la serie (o su componente estacionario) a través de su pasado por medio de diferentes tipos de relaciones.
Una serie de tiempo es estacionaria si su distribución es constante a lo largo del
tiempo; para muchas aplicaciones prácticas es suficiente considerar la llamada estacionariedad débil, esto es, cuando la media y la varianza de la serie son constantes a lo largo del tiempo. Muchas de las series de tiempo que se analizan en Econometría no cumplen con esta condición, cuando tienen una tendencia.
5º PRUEBA DE ESTACIONARIEDAD
Existen varias pruebas para verificar estacionariedad y se clasifican en los tipos
siguiente:
5.1. MÉTODO DE BOX - JENKINS
El procedimiento para verificar estacionariedad de la serie es: 1º El examen visual de la trayectoria de la serie a lo largo del tiempo puede dar
una idea de si es o no estacionaria en media. Si existe algún valor en torno al

cual la serie va oscilando pero sin alejarse de forma permanente de dicho valor, entonces se puede considerar que la serie es estacionaria en media.
2 º Si los coeficientes de AC no decaen rápidamente sería un indicio claro de que la serie es no estacionaria.
3º El primer coeficiente de PAC es significativo (es decir, mayor o igual a 0.9) entonces la serie es no estacionaria.
Si la serie es no estacionaria, la serie debería someterse a la primera diferencia,
y se volvería a analizar siguiendo los pasos anteriores. De esta forma se continuaría hasta obtener una serie diferenciada de orden d. En la práctica, es suficiente con tomar d = 1 o d = 2 para obtener una serie estacionaria en media.
EJEMPLO
1º Si observamos el ploteo del consumo personal agregado real se visualiza que no
oscila alrededor de su media, por lo tanto es no estacionaria.
2º Según el correlograma del consumo personal agregado real cae lentamente, por lo tanto no es estacionaria.
Abrir la serie ⇒ View ⇒ Correlogram... ⇒ se marca nivel y se escribe
12 lag ⇒ OK y se muestra el siguiente resultado:
Sample: 1950Q1 1988Q1 Included observations: 153
Autocorrelation Partial Correlation AC PAC Q-Stat Prob .|*******| .|*******| 1 0.955 0.955 142.33 0.000
.|*******| .|. | 2 0.911 -0.014 272.69 0.000 .|*******| .|. | 3 0.868 -0.014 391.73 0.000 .|****** | .|. | 4 0.825 -0.012 500.15 0.000 .|****** | .|. | 5 0.786 0.008 599.06 0.000 .|****** | .|. | 6 0.747 -0.010 689.07 0.000 .|***** | .|. | 7 0.711 0.006 771.12 0.000 .|***** | .|. | 8 0.677 0.008 846.07 0.000 .|***** | .|. | 9 0.645 0.008 914.68 0.000 .|***** | .|. | 10 0.616 0.011 977.69 0.000 .|**** | .|. | 11 0.590 0.012 1035.8 0.000 .|**** | .|. | 12 0.565 0.010 1089.5 0.000
3º Examinando el primer coeficiente de autocorrelación parcial del consumo
400
800
1200
1600
2000
2400
2800
1950 1955 1960 1965 1970 1975 1980 1985
CP @MEAN(CP,"1950q1 1988q1")
personal agregado real es significativo (0.955 > 0.9), entonces el ingreso personal disponible no es estacionario.
Como el consumo personal agregado real no es estacionario, tenemos que
examinar la primera diferencia de la serie y repetir el procedimiento de Box-Jenkins.
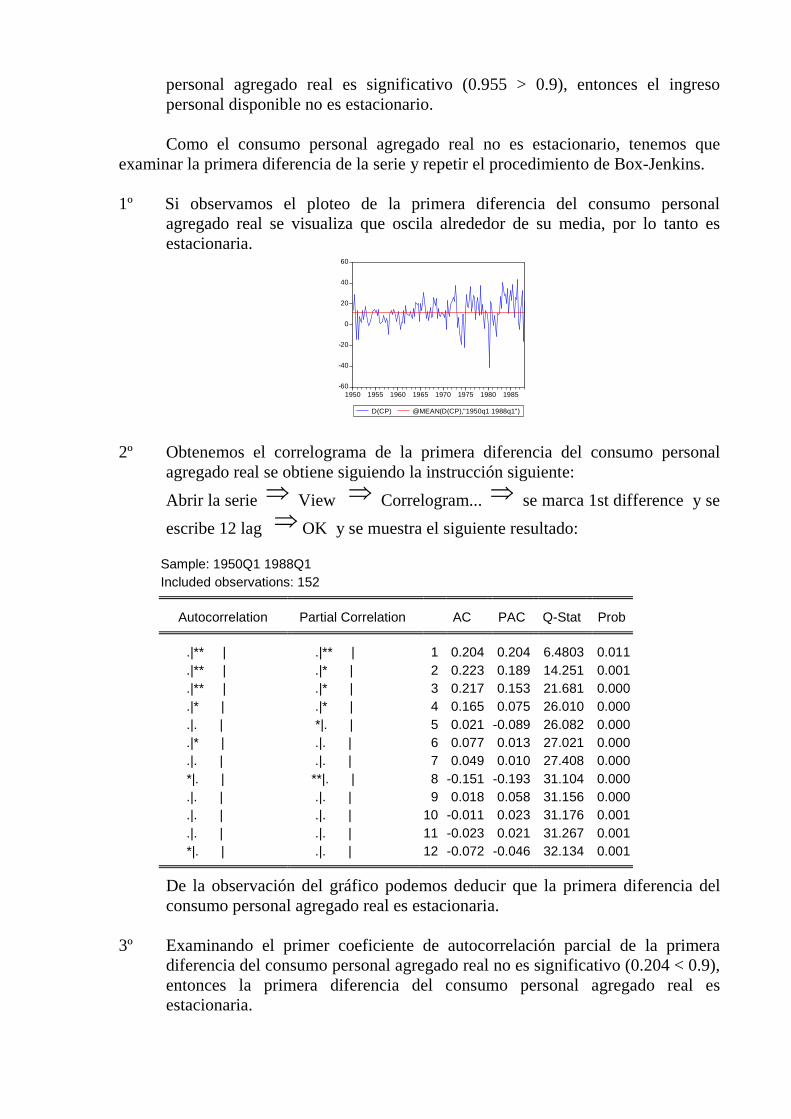
1º Si observamos el ploteo de la primera diferencia del consumo personal agregado real se visualiza que oscila alrededor de su media, por lo tanto es estacionaria.
2º Obtenemos el correlograma de la primera diferencia del consumo personal agregado real se obtiene siguiendo la instrucción siguiente:
Abrir la serie ⇒ View ⇒ Correlogram... ⇒ se marca 1st difference y se
escribe 12 lag ⇒ OK y se muestra el siguiente resultado:
Sample: 1950Q1 1988Q1 Included observations: 152
Autocorrelation Partial Correlation AC PAC Q-Stat Prob .|** | .|** | 1 0.204 0.204 6.4803 0.011
.|** | .|* | 2 0.223 0.189 14.251 0.001 .|** | .|* | 3 0.217 0.153 21.681 0.000 .|* | .|* | 4 0.165 0.075 26.010 0.000 .|. | *|. | 5 0.021 -0.089 26.082 0.000 .|* | .|. | 6 0.077 0.013 27.021 0.000 .|. | .|. | 7 0.049 0.010 27.408 0.000 *|. | **|. | 8 -0.151 -0.193 31.104 0.000 .|. | .|. | 9 0.018 0.058 31.156 0.000 .|. | .|. | 10 -0.011 0.023 31.176 0.001 .|. | .|. | 11 -0.023 0.021 31.267 0.001 *|. | .|. | 12 -0.072 -0.046 32.134 0.001
De la observación del gráfico podemos deducir que la primera diferencia del consumo personal agregado real es estacionaria.
3º Examinando el primer coeficiente de autocorrelación parcial de la primera
diferencia del consumo personal agregado real no es significativo (0.204 < 0.9), entonces la primera diferencia del consumo personal agregado real es estacionaria.
-60
-40
-20
0
20
40
60
1950 1955 1960 1965 1970 1975 1980 1985
D(CP) @MEAN(D(CP),"1950q1 1988q1")
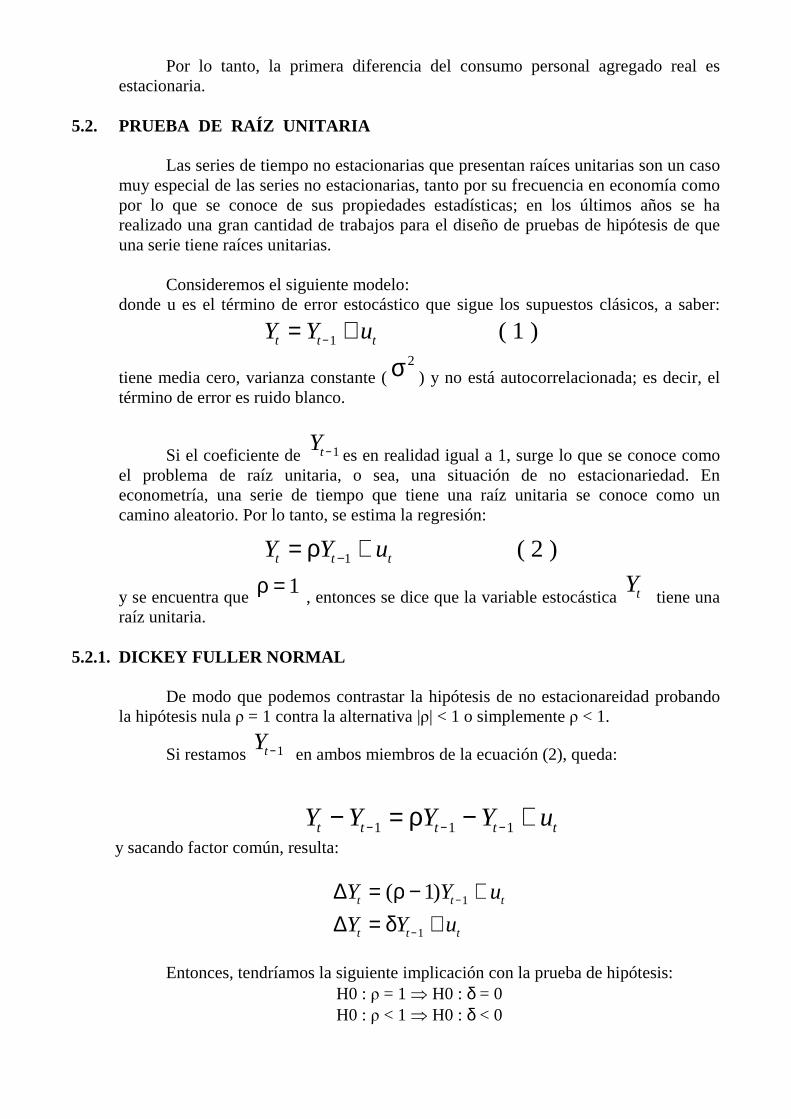
Por lo tanto, la primera diferencia del consumo personal agregado real es estacionaria.
5.2. PRUEBA DE RAÍZ UNITARIA
Las series de tiempo no estacionarias que presentan raíces unitarias son un caso
muy especial de las series no estacionarias, tanto por su frecuencia en economía como por lo que se conoce de sus propiedades estadísticas; en los últimos años se ha realizado una gran cantidad de trabajos para el diseño de pruebas de hipótesis de que una serie tiene raíces unitarias.
Consideremos el siguiente modelo:
donde u es el término de error estocástico que sigue los supuestos clásicos, a saber:
tiene media cero, varianza constante (σ2) y no está autocorrelacionada; es decir, el
término de error es ruido blanco.
Si el coeficiente de Yt −1 es en realidad igual a 1, surge lo que se conoce como
el problema de raíz unitaria, o sea, una situación de no estacionariedad. En econometría, una serie de tiempo que tiene una raíz unitaria se conoce como un camino aleatorio. Por lo tanto, se estima la regresión:
y se encuentra que ρ = 1
, entonces se dice que la variable estocástica Yt tiene una
raíz unitaria.
5.2.1. DICKEY FULLER NORMAL De modo que podemos contrastar la hipótesis de no estacionareidad probando
la hipótesis nula ρ = 1 contra la alternativa |ρ| < 1 o simplemente ρ < 1.
Si restamos Yt −1 en ambos miembros de la ecuación (2), queda:
y sacando factor común, resulta:
∆∆
Y Y u
Y Y ut t t
t t t
= − += +
−
−
( )ρδ
1 1
1 Entonces, tendríamos la siguiente implicación con la prueba de hipótesis:
H0 : ρ = 1 ⇒ H0 : δ = 0 H0 : ρ < 1 ⇒ H0 : δ < 0
Y Y Y Y ut t t t t− = − +− − −1 1 1ρ
Y Y ut t t= +−1 ( 1 )
Y Y ut t t= +−ρ 1 ( 2 )

Cuando las series en una regresión no son estacionarias, el uso del estadístico t para contrastar hipótesis δ = 0 es inadecuado pues este no sigue la distribución t Student. Esta tabla es limitada, pero Mac Kinnon preparó tablas más extensas, que están incorporadas en el Eviews.
Además de probar si una serie es una caminata aleatoria, Dickey y Fuller
desarrollaron también valores críticos para la presencia de una caminata aleatoria con desplazamiento y con tendencia determinística, es decir bajo tres distintas hipótesis nulas:
ttt
ttt
ttt
tYY
YY
YY
εαδαεδα
εδ
+++=∆++=∆
+=∆
−
−
−
210
10
1
Series como tY , las cuales se convierten en estacionarias después de tomar la
primera diferencia, se conocen como integradas de orden 1 y se designa como I(1). Las series estacionarias son series integradas de orden 0, I(0).
En general, si una serie debe ser diferenciada d veces para alcanzar
estacionaridad se dice que es integrada de orden d o I(d).
5.2.2. DICKEY FULLER AUMENTADO Al realizar la prueba de DF se supuso que el término de error ε t no estaba
correlacionado.
Dickey y Fuller, Said y Dickey (1984), Phillips y Perron (1988) y otros,
desarrollaron modificaciones de las pruebas de Dickey y Fuller cuando ε t , no es ruido blanco. Se conocen con el nombre de pruebas “aumentadas” de Dickey y Fuller.
No todos los procesos de series de tiempo pueden ser representadas por un
proceso autoregresivo de primer orden. Considerando un proceso autoregresivo de orden p, como:
y y y yt t t p t p t= + + + + +− − −α α α α ξ0 1 1 2 2 ....
adicionando y sustrayendo el término α p t py − +1 , nos resulta:
∆ ∆y y yt t i t ii
p
t= + + +− − +=∑α δ β ξ0 1 1
2 donde,
−−= ∑
=
p
ii
1
1 αδ y ∑=
=p
ijji αβ .
Donde ξt es un término de error puro con ruido blanco. El número de términos de

diferencia rezagados que se debe incluir, con frecuencia se determina de manera empírica, siendo la idea incluir los términos suficientes para que el término de error no esté serialmente relacionado. Considerando las tres posibilidades tenemos:
∆ ∆
∆ ∆
∆ ∆
y y y
y y y
y y y t
t t i t ii
p
t
t t i t ii
p
t
t t i t ii
p
t
= + +
= + + +
= + + + +
− − +=
− − +=
− − +=
∑
∑
∑
δ β ξ
α δ β ξ
α δ β α ξ
1 12
0 1 12
0 1 12
2
En la DFA se sigue probando δ = 0 y además esta prueba sigue la misma
distribución asintótica que el estadístico DF, por lo que se puede utilizar los mismos valores críticos.
Para elegir p se tiene los siguientes criterios: 1) Incluir retardos de tY hasta que el error sea ruido blanco.
2) Incluir retardos de tY significativos. 3) Utilizar AIC, SBC, etc. (“information criteria”), para elegir p.
Sin embargo, la prueba de Dickey-Fuller es frágil siempre hay que utilizar
información adicional (inspección visual de la serie, sentido común, historia, teoría) antes de aceptar o rechazar lo que sugiere la prueba de Dickey-Fuller
Si hay variables innecesarias en la regresión, es más difícil rechazar la hipótesis nula (existencia de raíz unitaria) cuando en realidad es 0<δ . Por consiguiente, existen tres pruebas:
1) Sin la constante y sin el término de tendencia. 2) Con la constante pero sin el término de tendencia. 3) Con la constante y el término de tendencia.
5.2.3. PRUEBA DE PHILLIPS - PERRON
Phillips y Perron (1988) proponen una alternativa (no paramétrico) método de control de la correlación serial cuando se realiza la prueba de raíz unitaria. Al igual
que la prueba ADF, la prueba PP es una prueba de hipótesis sobre ρ = 1 en la
ecuación:
∆Y Y tt t t= + + +−α δ β ε1
y modifica el t del coeficiente δ de modo que la correlación serial no afecta la distribución asintótica de la prueba estadística. La prueba PP se basa en la estadística:
( ) ( )( )sf
sefT
ftt
21
0
002
1
0
0
2
ˆˆ~ δγγδδ
−−
=
donde ( )δ̂se es el error estándar de coeficiente δ , s es el error estándar de la regresión de la prueba, 0γ es una estimación consistente de la varianza del error
(calculado como ( ) TskT /2− , donde k es el número de regresores) y 0f es un estimador del espectro residual en la frecuencia cero. Hay dos opciones que usted tendrá que hacer para realizar la prueba PP. En primer lugar, debe decidir si incluir una constante, una constante y una tendencia en el tiempo lineal, o ninguno, en la regresión de la prueba. En segundo lugar, usted tendrá que elegir un método para estimar 0f . Eviews apoya estimadores para 0f basados en el núcleo basado en suma-de-covarianzas, o sobre estimación de la densidad espectral autorregresivos. La distribución asintótica de la relación de PP es la misma que la de la estadística de ADF. La hipótesis nula del test de Phillips-Perron es la trayectoria de raíz unitaria con tendencia y la alternativa la estacionariedad con tendencia, si el valor t-Student
asociado al coeficiente de Yt−1es mayor en valor absoluto al valor crítico de
MacKinnon, se rechaza la hipótesis de existencia de raíz. La distribución asintótica de la prueba PP es la misma que la prueba DFA.
5.2.4. PRUEBA DE DICKEY – FULLER CON ELIMINACION D E LA TENDENCIA (DFGLS)
En los test anteriores, se puede optar por incluir una constante, o una constante y una tendencia en el tiempo lineal, en la prueba de regresión ADF. Para estos dos casos, el ERS (1996) proponen una simple modificación de las pruebas de ADF en el que los datos son sin tendencias a fin de que las variables explicativas son "sacadas" de los datos antes de ejecutar la prueba de regresión. ERS define una cuasi-diferencia de tY que depende del valor que representa la alternativa punto concreto contra el que deseamos probar la hipótesis nula:
( )
>−=
=− 1
1
1 tifaYY
tifYaYD
tt
tt
Se considera una regresión de MCO de la cuasi-diferenciada de datos ( )aYD t
sobre la cuasi-diferenciados ( )aXD t , es decir:

( ) ( ) ( ) ttt aaXDaYD εδ +′=
que tX contiene ya sea una constante, o una constante y la tendencia, y ( )aδ̂ son las estimaciones de MCO de esta regresión. Todo lo que necesitamos ahora es un valor para a . ERS recomienda el uso de
aa = , cuando:
{ }{ }
=−
=−=
tXifT
XifTat
t
,15.131
171
Definimos ahora el GLS sin tendencia de datos d
tY , utilizando las estimaciones relacionadas con a :
( )aXYY ttd
t δ̂′−= Entonces la prueba DFGLS consiste en calcular la ecuación siguiente:
td
ptpd
td
td
t YYYY υββα +∆++∆+=∆ −−− .....111
Si bien el DFGLS que es el ratio t sigue una distribución de Dickey-Fuller, en el caso de única constante, la distribución asintótica es diferente cuando se incluyen tanto una constante y tendencia. ERS simula los valores críticos de la estadística de prueba en este escenario para { }∞= ,200,100,50T . La hipótesis nula es rechazada por los valores que caen por debajo de estos valores críticos.
5.2.5. PRUEBA DE KWIATKOWSKI, PHILLIPS, SCHMIDT, Y SHIN (KPSS)
La prueba KPSS (1992) difiere de las otras pruebas de raíz unitaria, en que la
serie se supone que es estacionaria bajo la hipótesis nula. La estadística KPSS se basa en el los residuos de la regresión de MCO de tY en las variables exógenas tX :
ttt uXY +′= δ
El estadístico LM es definido como:
( ) ( )∑=
=T
t
fTtSLM1
022 /
donde 0f , es un estimador del espectro residual en la frecuencia cero y en caso de
( )tS es una función residual acumulativa:
( ) ∑=
=t
rrutS
1
ˆ
sobre la base de los residuos ( )0ˆˆ δttt XYu ′−= . Se señala que el estimador de δ utilizado en este cálculo difiere del estimador δ utilizado para GLS con eliminación

de la tendencia, ya que se basa en una regresión con los datos originales y no en la cuasi-datos diferenciados.
Para especificar la prueba KPSS, debe especificar el conjunto de regresores exógenos tX y un método para la estimación de 0f . Los valores reportados crítico para la estadística de prueba LM se basan en los resultados presentados en KPSS asintótica.
5.2.6. PRUEBA DE ELLIOT, ROTHENBERG, AND STOCK POI NT OPTIMAL
(ERS)
El estudio del punto óptimo de ERS se basa en la cuasi-regresión de
diferenciación que se define:
( ) ( ) ( ) ttt aaXDaYD εδ +′=
Definir los residuos de la ecuación como ( ) ( ) ( ) ( )aaXDaYDa ttt δε ˆˆ ′−= , y dejar
que ( ) ( )∑=
=T
tt aaSSR
1
2ε̂ sea la suma de los residuos al cuadrado. El ERS (posible) el
punto óptimo de la estadística de prueba de la hipótesis nula que 1=a frente a la alternativa que aa = , es definido como:
( ) ( )( )0
1f
SSRaaSSRPT−=
donde 0f , es un estimador del espectro residual en la frecuencia cero.
Para calcular la prueba de ERS, debe especificar el conjunto de regresores exógenos tX y un método para estimar 0f . Los valores críticos para la estadística de prueba ERS se calculan por interpolación de los resultados de la simulación prevista por el ERS para { }∞= ,200,100,50T .
5.2.7. PRUEBA DE NG Y PERRON (NP)
Ng y Perron (2001) construye cuatro pruebas estadísticas que se basan en los datos del GLS sin tendencia dtY . Estas pruebas estadísticas modifican las formas del
estadístico Phillips y Perron aZ y tZ , el estadístico Bhargava (1986) 1R y el estadístico ERS punto óptimo. En primer lugar, definimos el término:
( )∑=
−=T
t
dt TY
2
22
1 /κ
Las estadísticas modificadas puede escribirse como:
( )( ) ( )
( )( )( ) { }
( ) ( )( ) { }
=−+=−=
=
×=
−=
−
−
−
tXiffYTcc
XiffYTccMP
fMSB
MSBMZMZ
fYTMZ
td
T
td
TdT
adt
dT
da
,1/1
1/
/
2/
0
2120
212
21
0
0
21
κκ
κ
κ
donde: { }
{ }
=−=−
=tXif
Xifc
t
t
,15.13
17
Las pruebas NP requieren una especificación para tX y la elección de un
método para la estimación de 0f .
5.2.8. CRÍTICAS DE LAS PRUEBAS DE RAÍZ UNITARIA Existen varias pruebas de raíz unitaria porque difieren en el tamaño y potencia
de dichas pruebas. Por tamaño de la prueba se quiere entender el nivel de significancia (es decir, la
probabilidad de cometer error de tipo I) y por potencia de una prueba se entiende la probabilidad de rechazar la hipótesis nula cuando es falsa.
La potencia de una prueba se calcula restando la probabilidad de un error de
tipo II de uno. La mayoría de las pruebas del tipo DF tienen poco poder; es decir, tienden
aceptar la nulidad de la raíz unitaria con más frecuencia de la que se garantiza. En otras palabras, estas pruebas pudieran encontrar una raíz unitaria, aunque ésta no exista.
Perron (1989) sostuvo que los tradicionales test de raíz unitaria (Dickey-Fuller,
Dickey-Fuller Aumentado y Phillips-Perron) tenían poco poder para diferenciar una trayectoria de raíz unitaria de una estacionaria cuando había cambio estructural. En consecuencia, como estos test estaban sesgados hacia el no rechazo de la hipótesis nula de raíz unitaria, a menudo se rechazaba incorrectamente la hipótesis alternativa de estacionariedad. Perron encontró, por ejemplo, que las series de agregados macroeconómicos y financieros utilizados por Nelson y Plosser (1982) eran en su mayoría estacionarias con cambio estructural, en oposición a lo que los citados autores señalaban.
5.2.9. EJERCICIO
Considerando el consumo personal agregado real y observando su ploteo con la
media, deducimos que tiene tendencia e intercepto, además consideramos cuatro rezagos y el criterio Schwarz para elegir el retardo óptimo.
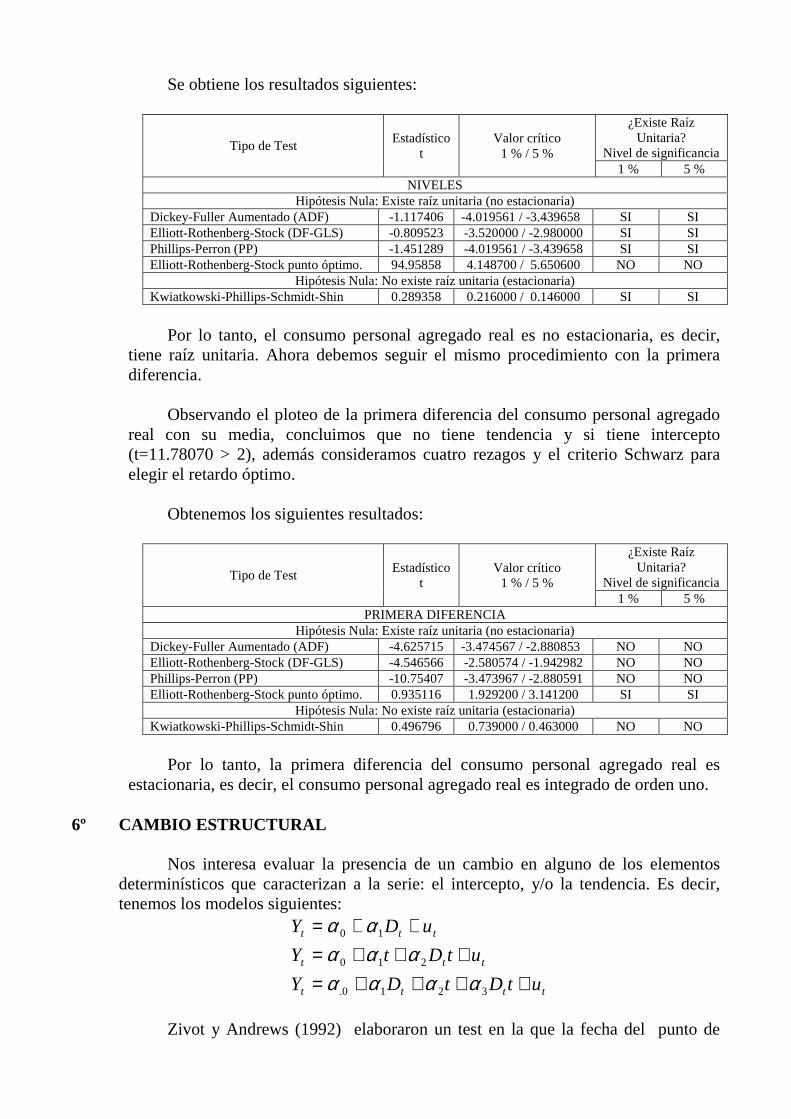
Se obtiene los resultados siguientes:
Tipo de Test Estadístico
t Valor crítico
1 % / 5 %
¿Existe Raíz Unitaria?
Nivel de significancia 1 % 5 %
NIVELES Hipótesis Nula: Existe raíz unitaria (no estacionaria)
Dickey-Fuller Aumentado (ADF) -1.117406 -4.019561 / -3.439658 SI SI Elliott-Rothenberg-Stock (DF-GLS) -0.809523 -3.520000 / -2.980000 SI SI Phillips-Perron (PP) -1.451289 -4.019561 / -3.439658 SI SI Elliott-Rothenberg-Stock punto óptimo. 94.95858 4.148700 / 5.650600 NO NO
Hipótesis Nula: No existe raíz unitaria (estacionaria) Kwiatkowski-Phillips-Schmidt-Shin 0.289358 0.216000 / 0.146000 SI SI
Por lo tanto, el consumo personal agregado real es no estacionaria, es decir,
tiene raíz unitaria. Ahora debemos seguir el mismo procedimiento con la primera diferencia.
Observando el ploteo de la primera diferencia del consumo personal agregado
real con su media, concluimos que no tiene tendencia y si tiene intercepto (t=11.78070 > 2), además consideramos cuatro rezagos y el criterio Schwarz para elegir el retardo óptimo.
Obtenemos los siguientes resultados:
Tipo de Test Estadístico
t Valor crítico
1 % / 5 %
¿Existe Raíz Unitaria?
Nivel de significancia 1 % 5 %
PRIMERA DIFERENCIA Hipótesis Nula: Existe raíz unitaria (no estacionaria)
Dickey-Fuller Aumentado (ADF) -4.625715 -3.474567 / -2.880853 NO NO Elliott-Rothenberg-Stock (DF-GLS) -4.546566 -2.580574 / -1.942982 NO NO Phillips-Perron (PP) -10.75407 -3.473967 / -2.880591 NO NO Elliott-Rothenberg-Stock punto óptimo. 0.935116 1.929200 / 3.141200 SI SI
Hipótesis Nula: No existe raíz unitaria (estacionaria) Kwiatkowski-Phillips-Schmidt-Shin 0.496796 0.739000 / 0.463000 NO NO
Por lo tanto, la primera diferencia del consumo personal agregado real es
estacionaria, es decir, el consumo personal agregado real es integrado de orden uno.
6º CAMBIO ESTRUCTURAL
Nos interesa evaluar la presencia de un cambio en alguno de los elementos determinísticos que caracterizan a la serie: el intercepto, y/o la tendencia. Es decir, tenemos los modelos siguientes:
tttt
ttt
ttt
utDtDY
utDtY
uDY
++++=+++=
++=
3210.
210
10
ααααααα
αα
Zivot y Andrews (1992) elaboraron un test en la que la fecha del punto de
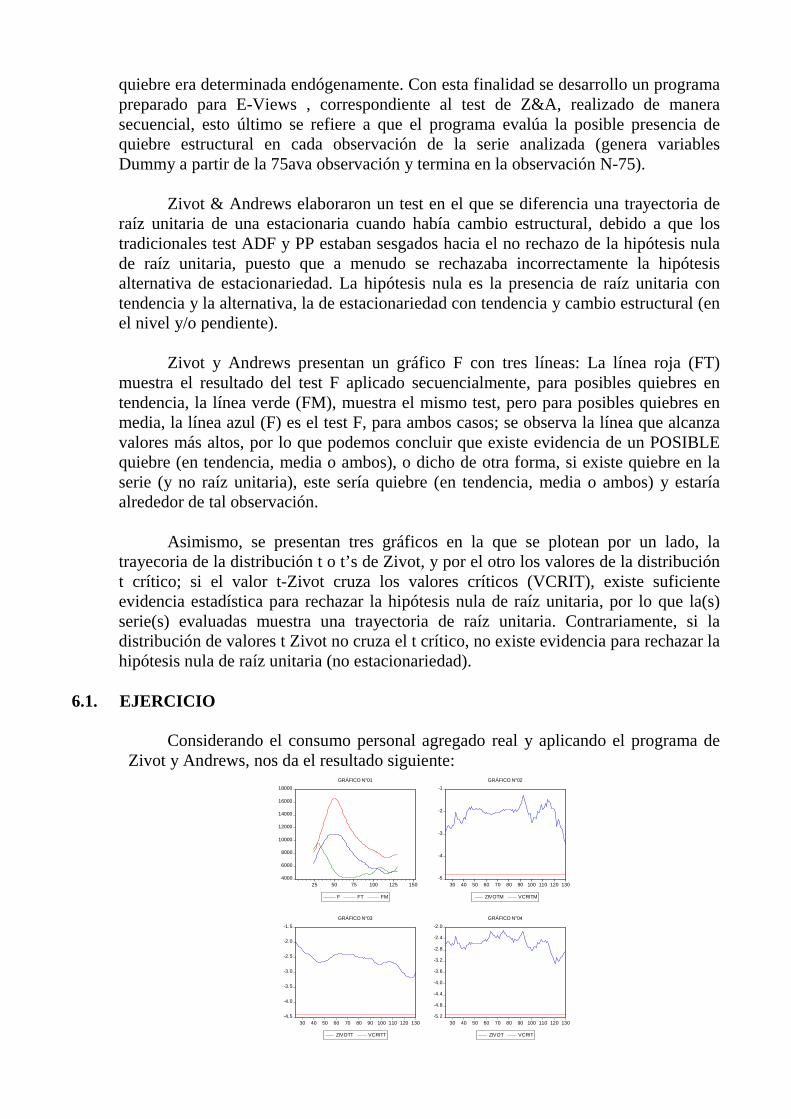
quiebre era determinada endógenamente. Con esta finalidad se desarrollo un programa preparado para E-Views , correspondiente al test de Z&A, realizado de manera secuencial, esto último se refiere a que el programa evalúa la posible presencia de quiebre estructural en cada observación de la serie analizada (genera variables Dummy a partir de la 75ava observación y termina en la observación N-75). Zivot & Andrews elaboraron un test en el que se diferencia una trayectoria de raíz unitaria de una estacionaria cuando había cambio estructural, debido a que los tradicionales test ADF y PP estaban sesgados hacia el no rechazo de la hipótesis nula de raíz unitaria, puesto que a menudo se rechazaba incorrectamente la hipótesis alternativa de estacionariedad. La hipótesis nula es la presencia de raíz unitaria con tendencia y la alternativa, la de estacionariedad con tendencia y cambio estructural (en el nivel y/o pendiente). Zivot y Andrews presentan un gráfico F con tres líneas: La línea roja (FT) muestra el resultado del test F aplicado secuencialmente, para posibles quiebres en tendencia, la línea verde (FM), muestra el mismo test, pero para posibles quiebres en media, la línea azul (F) es el test F, para ambos casos; se observa la línea que alcanza valores más altos, por lo que podemos concluir que existe evidencia de un POSIBLE quiebre (en tendencia, media o ambos), o dicho de otra forma, si existe quiebre en la serie (y no raíz unitaria), este sería quiebre (en tendencia, media o ambos) y estaría alrededor de tal observación.
Asimismo, se presentan tres gráficos en la que se plotean por un lado, la trayecoria de la distribución t o t’s de Zivot, y por el otro los valores de la distribución t crítico; si el valor t-Zivot cruza los valores críticos (VCRIT), existe suficiente evidencia estadística para rechazar la hipótesis nula de raíz unitaria, por lo que la(s) serie(s) evaluadas muestra una trayectoria de raíz unitaria. Contrariamente, si la distribución de valores t Zivot no cruza el t crítico, no existe evidencia para rechazar la hipótesis nula de raíz unitaria (no estacionariedad).
6.1. EJERCICIO Considerando el consumo personal agregado real y aplicando el programa de
Zivot y Andrews, nos da el resultado siguiente:
4000
6000
8000
10000
12000
14000
16000
18000
25 50 75 100 125 150
F FT FM
GRÁFICO N° 01
-5
-4
-3
-2
-1
30 40 50 60 70 80 90 100 110 120 130
ZIVOTM VCRITM
GRÁFICO N° 02
-4.5
-4.0
-3.5
-3.0
-2.5
-2.0
-1.5
30 40 50 60 70 80 90 100 110 120 130
ZIVOTT VCRITT
GRÁFICO N° 03
-5.2
-4.8
-4.4
-4.0
-3.6
-3.2
-2.8
-2.4
-2.0
30 40 50 60 70 80 90 100 110 120 130
ZIVOT VCRIT
GRÁFICO N° 04

Como se aprecia en el gráfico N° 01, existe un posible quiebre estructural en tendencia y en los otros tres gráficos, los valores t Zivot no cruzan el t crítico, no existe evidencia para rechazar la hipótesis nula de raíz unitaria (no estacionariedad).
7º MODELOS UNIVARIANTES DE SERIES DE TIEMPO
La serie temporal es explicada por los valores pasados de dicha serie y un cierto término de error y su pasado.
Se asume que la perturbación es generada por un proceso de ruido blanco, es decir:
Tenemos los siguientes modelos:
1º Modelo de Media Móvil de orden q.-
El proceso Yt queda descrito completamente por una suma ponderada de los errores actuales y pasados. Es decir, cada observación de la serie es generada por una media ponderada de perturbaciones aleatorias con un retardo de q periodos. Escribimos el modelo MA(q) así:
en forma simplificada es:
donde B es un operador de cambio hacia atrás (impone un retardo temporal de un periodo cada vez que se aplica a una variable).
Este proceso señala que la influencia sobre la variable Yt es
esencialmente por errores.
La media del proceso es el intercepto (E Y ut( ) = ) y la varianza es:
Var Yt q( ) ( ..... )= + + + +σ θ θ θε2
12
22 21
Si Yt es la realización de un proceso aleatorio estacionario, es preciso
que la ∑=
q
ii
1
2θ sea convergente a medida que q llega a ser infinitamente grande,
entonces los iθ son cada vez menores a medida que aumenta i. Esto implica
E Var Covt t t t k( ) ( ) ( )ε ε σ ε εε= = = ∀ ≠−0 02 , , k 0.
Y ut t t t q t q= + − − − −− − −ε θ ε θ ε θ ε1 1 2 2 .....
Y u Bt t= + θ ε( )

que si el proceso es estacionario su función de autocorrelación medida que aumenta k.
1.1. MA(1)
las características del proceso son:
siendo la condición de invertibilidad autocorrelación es:
y la función de autocorrelación parcial es:
presenta un decrecimiento exponencial porque
correlogramas
que si el proceso es estacionario su función de autocorrelación medida que aumenta k.
las características del proceso son:
siendo la condición de invertibilidad θ 1 1<
autocorrelación es:
y la función de autocorrelación parcial es:
presenta un decrecimiento exponencial porque
elogramas de un proceso de promedio móvil de primer orden son:
Y ut t t= + − −ε θ ε1 1
( ) (E Y u t
K
= = +
= − = ∀
K
γ σ
γ θ σ γε
ε
02
1 12
1
0
ρ θθ
ρ11
121
0= −+
= ∀ K
( ) ( )ρ
θ θθK
K
K* =
− −− +
1 12
2 2
1
1
que si el proceso es estacionario su función de autocorrelación ρk decrece a
1. La función de
presenta un decrecimiento exponencial porque 11 <θ . Los
proceso de promedio móvil de primer orden son:
) K > 1.
θ12
∀K > 1.
)

1.2. MA(2)
las características del proceso son:
siendo la condición de invertibilidad:
La función de autocorrelación es:
Los correlogramas
orden son:
La función de autocorrelación se anula para retardos superiores a
q, mientras que la función de autocorrelación parcial presenta un decrecimiento rápido de tipo exponencial y / o sinusoidal.
�� � � � �� � �1��-1 � �2��-2
las características del proceso son:
siendo la condición de invertibilidad:
La función de autocorrelación es:
correlogramas de un proceso de promedio móvil de segundo
La función de autocorrelación se anula para retardos superiores a q, mientras que la función de autocorrelación parcial presenta un decrecimiento rápido de tipo exponencial y / o sinusoidal.
( ) (( )
E Y u t
K
= =
= − − = −= ∀
K > 2.1 2
γ σ
γ θ θ σ γ θγ
ε
ε
02
1 22
2
1
1
0
θ θ θ θ2 1 11 1+ < − < 2
( )ρ
θ θθ θ
ρ
ρ
11 2
12
22
1
1
0
=− −
+ += ∀
K > 2.
2
K
2
de un proceso de promedio móvil de segundo
La función de autocorrelación se anula para retardos superiores a q, mientras que la función de autocorrelación parcial presenta un decrecimiento rápido de tipo exponencial y / o sinusoidal.
)+ +θ θ
σ ε
12
22
22
1
θ 1< 2
θθ θ 2
2
−+
=1+
2
12

2º Modelo de Autoregresivo de orden p.-
El proceso Yt depende de una suma ponderada de sus valores pasados y
de un término de error. Es decir, la observación actual (Yt ) es generada por
una media ponderada de observaciones anteriores que se remontan p periodos en el pasado, junto con una perturbación aleatoria correspondiente al periodo actual. El modelo AR(p) sería:
en forma simplificada es:
donde B es un operador de cambio hacia atrás (impone un retardo temporal de un periodo cada vez que se aplica a una variable).
Los valores anteriores, pueden estar incluyendo los factores tendenciales, cíclicos, y / o estacionales de la serie.
La media del proceso es:
Para que la media del proceso sea finita es necesario que la φ i
i
p
=∑
1 sea diferente a uno.
2.1. AR(1)
las características del proceso son:
siendo la condición de estacionariedad
11 <φ . La función de
autocorrelación es: K
k 1φρ = y la función de autocorrelación parcial es:
Y Y Y Yt t t p t= + + + +− − −δ φ φ φ1 1 2 2 .....
φ δ ε( )B Yt t= +
u E Yt
p
= =− − − −
( ).....
δφ φ φ1 1 2
Y Yt t t= + +−δ φ ε1 1
u
KK
=−
=−
= = =
δφ
γ σφ
γ φ γ γ φ γ γ φ γ
ε
1 110
2
12
1 1 0 2 12
0 1 0
.........

Los correlogramas de un proceso autorregresivo de primer orden son:
2.2. AR(2):
las características del proceso son:
siendo la condición de estacionariedad:
La funcción de autocorrelación es:
y la función de autocorrelación parcial es:
φ φ φ φ φ2 1 11 1 1+ < − < < 2 2
ρφ
φρ φ ρ φ ρ1
1
21 1 2 21
=−
= + ∀− − K > 1K K K
ρφ
φρ φ ρ1
1
22 21
0* * *=−
= = ∀ K > 2K
ρ φρ
1 1
0
*
*
=
= ∀K K = 2, 3,
Y Y Yt t t t= + + +− −δ φ φ ε1 1 2 2
u
+K K
=− −
= + +
= ∀− −
δφ φ
γ φ γ φ γ σ
γ φ γ φ γ
ε1 1 20 1 1 2 2
2
1 1 1 2 2
K > 0
La función de autocorrelación presenta de tipo geométrico puro, y geométrico con alteración de signos, sinusoidal o mezcla de varios tipos, mientras que la función de autocorrelación parcial se anula para retardos superiores a dos. Los orden son:
El proceso tiene una memoria infinita, es decir, el valor actual del proceso (Yesta dependencia disminuye con el
La función de autocorrelación presenta un decrecimiento rápido de tipo geométrico puro, y geométrico con alteración de signos, sinusoidal o mezcla de varios tipos, mientras que la función de autocorrelación parcial se anula para retardos superiores a dos.
Los correlogramas de un proceso autorregresivo de segundo
El proceso tiene una memoria infinita, es decir, el valor actual del
tY ) depende de todos los valores pasados, aunque el grado de esta dependencia disminuye con el tiempo.
un decrecimiento rápido de tipo geométrico puro, y geométrico con alteración de signos, sinusoidal o mezcla de varios tipos, mientras que la función de autocorrelación parcial se anula para retardos superiores a dos.
de un proceso autorregresivo de segundo
El proceso tiene una memoria infinita, es decir, el valor actual del ) depende de todos los valores pasados, aunque el grado de

Para cualquier proceso autoregresivo estacionario, sea del orden
que sea, existe un proceso de media móvil de orden infinito equivalente.
3º Modelo de Autoregresivo de Media Móvil de orden (p,q).-
En estos modelos el proceso tY es una función tanto de los errores pasados como de sus valores pasados, así como de un término de error correspondiente al periodo presente. Es decir, la observación actual (tY ) es generada por una media ponderada de observaciones anteriores que se remontan p periodos en el pasado y una media ponderada de perturbaciones aleatorias con un retardo de q periodos, junto con una perturbación aleatoria correspondiente al periodo actual. El modelo ARMA(p,q) se escribe:
en forma simplificada es:
donde B es un operador de cambio hacia atrás (impone un retardo temporal de un periodo cada vez que se aplica a una variable).
La media del proceso es:
Para que la media del proceso sea finita es necesario que la ∑=
P
ii
1
φ sea
diferente a uno.
ARMA(1,1)
las características del proceso son:
siendo la condición de estacionariedad 11 <φ y 11 <θ . La función de
autocorrelación es:
Tanto la función de autocorrelación y la función de autocorrelación parcial presenta a los primeros valores iniciales que no tienen un patrón fijo y
Yt Yt Yt pYt p t t t q t q= + − + − + + − + − − − − − − −δ φ φ φ ε θ ε θ ε θ ε1 1 2 2 1 1 2 2..... .....
φ δ θ ε( ) ( )B Y Bt t= +
u E Yt
p
= =− − − −
( ).....
δφ φ φ1 1 2
Y Yt t t t= + + −− −δ φ ε θ ε1 1 1 1
u
K k
=−
=+ −
−
= = ∀−
δφ
γθ φ θ
φσ
γ φ γ θ σ γ φ γ
ε
ε
11 2
110
12
1 1
12
2
1 1 0 1 1
- K > 112
( )( )ρ
φ θ φ θθ φ θ
ρ φ ρ11 1 1 1
12
1 11 1
1
1 2=
− −+ −
= ∀− K > 1K K

van seguidos de una mezcla de oscilaciones sinusoidales y / o exponenciales amortiguadas.
El proceso tiene una memoria infinita, es decir, el valor actual del proceso ( tY ) depende hasta el periodo q de ambos procesos (media móvil y autoregresivo) y después del retardo q solamente depende del proceso autoregresivo.
4º PROCESO ESTOCÁSTICO NO ESTACIONARIO
En la práctica, muchas de las series temporales con las que trabajamos son no estacionarias, de forma que las características del error se modifican con el transcurso del tiempo. Recordemos que la serie no estacionaria se puede transformar en estacionaria diferenciándola una o varias veces.
4.1. MODELOS ARIMA
Un proceso integrado es aquel que puede convertirse en estacionario aplicando diferencias. Así, por ejemplo, un camino aleatorio sería un proceso integrado de orden 1 (I(1)), ya que puede convertirse en estacionario tomando primeras diferencias. Definimos el orden de integración de un proceso como el número de diferencias que debemos aplicarle para convertirlo en estacionario. En el contexto de las series económicas los órdenes de integración más frecuentes son 1 ó 2 I(1) ó I(2). En algunas ocasiones las diferencias deben aplicarse sobre el valor estacional.
Tenemos los siguientes modelos:
1º Modelo Integrado de Media Móvil de orden (0,d,q).-
El proceso tdY∆ queda descrito completamente por una suma
ponderada de los errores actuales y pasados. Es decir, cada observación de la serie diferenciada es generada por una media ponderada de perturbaciones aleatorias con un retardo de q periodos.
Escribimos el modelo IMA(0,d,q) así:
en forma simplificada es:
donde B es un operador de cambio hacia atrás (impone un retardo temporal de un periodo cada vez que se aplica a una variable).
∆dt t t t q t qY u= + − − − −− − −ε θ ε θ ε θ ε1 1 2 2 .....
∆dt tY u B= + θ ε( )
2º Modelo de Autoregresivo Integrado de orden (p,d,0).-
El proceso tdY∆ depende de una suma ponderada de sus valores
pasados y de un término de error. Es decir, la observación actual ( tdY∆ )
es generada por una media ponderada de observaciones anteriores que se remontan p periodos en el pasado, junto con una perturbación aleatoria correspondiente al periodo actual.
El modelo ARI(p,d,0) sería:
en forma simplificada es:
donde B es un operador de cambio hacia atrás (impone un retardo temporal de un periodo cada vez que se aplica a una variable).
3º Modelo de Autoregresivo Integrado de Media Móvil de orden (p,d,q).-
En estos modelos el proceso t
dY∆ es una función tanto de los errores pasados como de sus valores pasados, así como de un término de error correspondiente al periodo presente. Es decir, la observación actual ( t
dY∆ ) es generada por una media ponderada de observaciones anteriores que se remontan p periodos en el pasado y una media ponderada de perturbaciones aleatorias con un retardo de q periodos, junto con una perturbación aleatoria correspondiente al periodo actual.
El modelo ARIMA(p,d,q) se escribe:
en forma simplificada es:
donde B es un operador de cambio hacia atrás (impone un retardo temporal de un periodo cada vez que se aplica a una variable).
Lo que se hace cuando se posee una serie no estacionaria, es trabajar con la serie diferenciada (modificada a estacionaria), identificando un modelo para esta serie. Si se ha llevado un análisis de predicción para las series diferenciadas, es sencillo traducir las predicciones obtenidas para estas series en predicciones para las series originales.
∆ ∆ ∆ ∆dt
dt
dt p
dt p tY Y Y Y= + + + + +− − −δ φ φ φ ε1 1 2 2 .....
φ δ ε( )B Ydt t∆ = +
∆ ∆ ∆ ∆d d d dYt Yt Yt p Yt p t t t q t q= + − + − + + − + − − − − − − −δ φ φ φ ε θ ε θ ε θ ε1 1 2 2 1 1 2 2. . . . . . . . . .
φ δ θ ε( ) ( )B Y Bdt t∆ = +
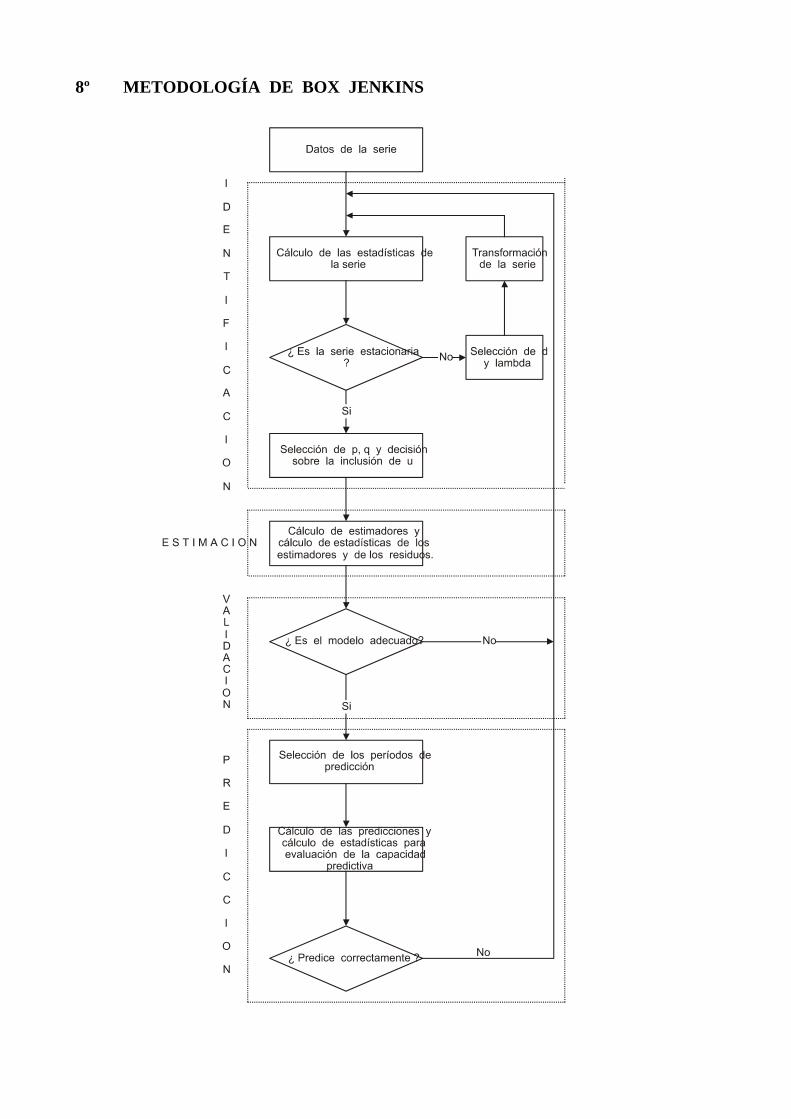
8º METODOLOGÍA DE BOX JENKINS
8.1. IDENTIFICACIÓN
I.- Serleccionar d
1º Ploteo de la serie con respecto a su media.-
Cuando la serie muestra una tendencia persistente o bien deambula haciaarriba o hacia abajo sin mostrar afinidad hacia un nivel determinado, será unaserie no estacionaria en media.
2º Correlograma de la serie.-
Si los coeficientes de la función de autocorrelación no decaenrápidamente sería un indicio claro de que la serie es no estacionaria.
3º Primer Coeficiente Autocorrelación Parcial.-
Si el primer coeficiente de autocorrelación parcial es significativo ( )≥ 09.entonces la serie es no estacionaria.
Si la serie es no estacionaria sería necesario en general tomar algunadiferencia.
Las consecuencias de aplicar un número de diferencias mayor que elnecesario han sido que el modelo sea no invertible y con una varianza mayor quesi se hubiera aplicado un número de diferencias correcto. Sin embargo, siempreserá estacionario.
Si al estimar un modelo, en la parte de medias móviles se obtiene algunao algunas raíces cercanas a uno sería indicativo de que ha existidosobreidentificación de la serie.
Para elegir la diferenciación adecuada se calcula la varianza de la serieoriginal y de la serie sometida a diferentes diferenciaciones, tomándose ladiferencia para la cual la varianza es mínima.
EJEMPLO:
Para identificar el modelo se considerará la serie Indice de Precio al Consumidor(IPC) y la información que se tiene es de enero de 1986 a diciembre de 1997.
Esta información se dividirá de la siguiente manera:Período de retardo 1986:01 - 1989:12Período de estimación 1990:01 - 1996:12Período de predicción 1997:01 - 1997:12
Lo primero que tenemos que hacer es cambiar la muestra al período deestimación, con la instrucción siguiente: SMPL 1990:01 1996:12
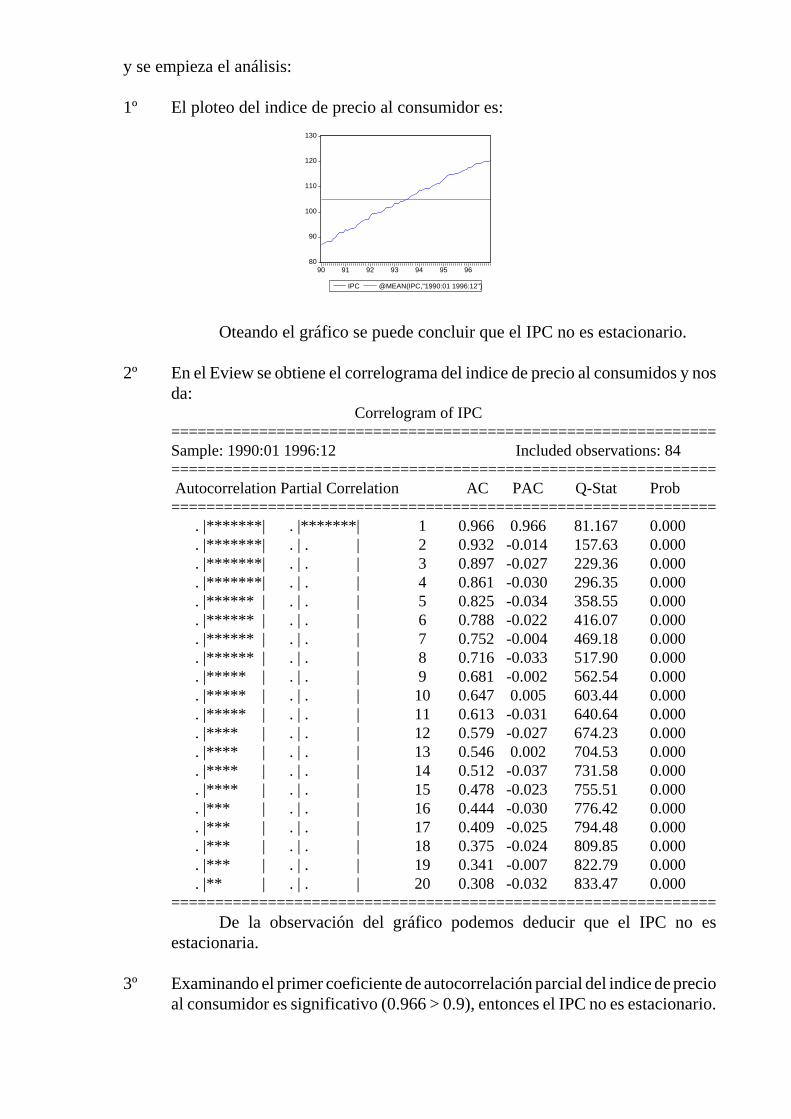
80
90
100
110
120
130
90 91 92 93 94 95 96
IPC @MEAN(IPC,"1990:01 1996:12")
y se empieza el análisis:
1º El ploteo del indice de precio al consumidor es:
Oteando el gráfico se puede concluir que el IPC no es estacionario.
2º En el Eview se obtiene el correlograma del indice de precio al consumidos y nosda:
Correlogram of IPC==============================================================Sample: 1990:01 1996:12 Included observations: 84============================================================== Autocorrelation Partial Correlation AC PAC Q-Stat Prob============================================================== . |*******| . |*******| 1 0.966 0.966 81.167 0.000 . |*******| . | . | 2 0.932 -0.014 157.63 0.000 . |*******| . | . | 3 0.897 -0.027 229.36 0.000 . |*******| . | . | 4 0.861 -0.030 296.35 0.000 . |****** | . | . | 5 0.825-0.034 358.55 0.000 . |****** | . | . | 6 0.788-0.022 416.07 0.000 . |****** | . | . | 7 0.752-0.004 469.18 0.000 . |****** | . | . | 8 0.716-0.033 517.90 0.000 . |***** | . | . | 9 0.681 -0.002 562.54 0.000 . |***** | . | . | 10 0.647 0.005 603.44 0.000 . |***** | . | . | 11 0.613 -0.031 640.64 0.000 . |**** | . | . | 12 0.579 -0.027 674.23 0.000 . |**** | . | . | 13 0.546 0.002 704.53 0.000 . |**** | . | . | 14 0.512 -0.037 731.58 0.000 . |**** | . | . | 15 0.478 -0.023 755.51 0.000 . |*** | . | . | 16 0.444 -0.030 776.42 0.000 . |*** | . | . | 17 0.409 -0.025 794.48 0.000 . |*** | . | . | 18 0.375 -0.024 809.85 0.000 . |*** | . | . | 19 0.341 -0.007 822.79 0.000 . |** | . | . | 20 0.308 -0.032 833.47 0.000==============================================================
De la observación del gráfico podemos deducir que el IPC no esestacionaria.
3º Examinando el primer coeficiente de autocorrelación parcial del indice de precioal consumidor es significativo (0.966 > 0.9), entonces el IPC no es estacionario.

-0.5
0.0
0.5
1.0
1.5
2.0
90 91 92 93 94 95 96
D(IPC)@MEAN(D(IPC),"1990:01 1996:12")
Como el indice de precio al consumidor no es estacionario, tenemos queexaminar la primera diferencia de la serie y repetir el procedimiento de Box - Jenkins.
1º Si observamos el ploteo de la primera diferencia del IPC se visualiza que oscilaalrededor de su media, por lo tanto es estacionaria.
2º Obtenemos el correlograma de la primera diferencia del IPC siguiendo lainstrucción siguiente:Abrir la serie View Correlogram... se marca 1st difference y se⇒ ⇒ ⇒escribe 20 lag OK⇒ y se muestra el siguiente resultado:
Correlogram of D(IPC)==============================================================Sample: 1990:01 1996:12 Included observations: 84============================================================== Autocorrelation Partial Correlation AC PAC Q-Stat Prob============================================================== . | . | . | . | 1 0.046 0.046 0.1826 0.669 **| . | **| . | 2 -0.198 -0.200 3.6207 0.164 .*| . | . | . | 3 -0.066 -0.048 4.0047 0.261 . | . | .*| . | 4 -0.046 -0.084 4.1997 0.380 .*| . | **| . | 5 -0.184 -0.212 7.2953 0.200 . |*. | . |*. | 6 0.178 0.178 10.235 0.115 . | . | .*| . | 7 -0.001 -0.122 10.235 0.176 . | . | . | . | 8 0.001 0.061 10.235 0.249 .*| . | **| . | 9 -0.186 -0.242 13.581 0.138 .*| . | .*| . | 10 -0.153 -0.169 15.860 0.104 . | . | .*| . | 11 -0.048 -0.062 16.090 0.138 . |**** | . |**** | 12 0.541 0.492 45.419 0.000 . | . | .*| . | 13 0.018 -0.121 45.452 0.000 .*| . | . | . | 14 -0.104 0.004 46.574 0.000 . | . | . | . | 15 -0.018 -0.027 46.607 0.000 . |*. | . |*. | 16 0.068 0.184 47.093 0.000 .*| . | . |** | 17 -0.069 0.202 47.611 0.000 . |*. | .*| . | 18 0.094 -0.127 48.574 0.000 . | . | . | . | 19 0.029 0.016 48.665 0.000 . | . | .*| . | 20 0.003 -0.068 48.666 0.000==============================================================
De la observación del gráfico podemos deducir que la primera diferenciadel IPC es estacionaria.

λλ
λ
= ⇒
= ⇒
< < ⇒
1
0
0 1
no se transforma la serie
se aplica logaritmos neperianos a la serie
se eleva la serie a un exponente fraccionario
3º Examinando el primer coeficiente de autocorrelación parcial de la primeradiferencia del IPC no es significativo (0.046 < 0.9), entonces la primeradiferencia del IPC es estacionaria.
Por lo tanto, el valor de d es igual uno.
II.- Elegir λ
La diferencia de un determinado orden es suficiente en muchos casos paraobtener series estacionarias en media y varianza.
En series económicas que se extienden a lo largo de un período dilatado detiempo y que están afectados por una fuerte tendencia, suele ser necesario efectuarademás alguna transformación instantánea del tipo Box - Cox, para obtener una serieestacionaria en varianza y que al mismo tiempo tenga una distribución normal.
Cuando:
en la práctica, las alternativas que se utilizan son las dos primeras.
Los instrumentos que usan para detectar si la serie es estacionaria o no envarianza son:
1º Ploteo de la serie.-
Es relativamente frecuente que a medida que aumenta el nivel, aumentetambién la dispersión, siendo en ese caso .λ = 0
2º Gráfico rango - media.-
Si los datos son de carácter estacional, se suele tomar la longitud delintervalo igual a la del período estacional; así para datos mensuales cada uno delos intervalos tendrá una longitud de doce datos. En el gráfico rango - media setiene las alternativas siguientes:
Si los correspondientes puntos están más o menos alineados en torno auna línea recta con pendiente ascendente sería indicativo de que las serie es no

-0.5
0.0
0.5
1.0
1.5
2.0
90 91 92 93 94 95 96
D(IPC)
estacionaria en varianza.
Puede ocurrir que los datos no sean sensibles a la elección de , en esteλcaso el gráfico rango - media de la serie y el correspondiente de la serietransformada serían muy similares; por lo tanto, la serie es estacionaria envarianza.
Cuando la serie es no estacionaria en varianza entonces la transformaciónapropiada es aplicar logaritmos neperianos a la serie.
EJEMPLO:
Observando el gráfico de la primera diferencia del Indice de Precio alConsumidor podemos concluir que la primera diferencia del IPC es estacionaria envarianza porque no presenta una tendencia definida.
Para construir el gráfico rango - media, vamos a trabajar con intervalos de un añopara determinar su media y desviación estándar, estos resultados son:
================================ PERIODO MEDIA DS================================ 1990:01-1990:12 0.470917 0.398476 1991:01-1991:12 0.423583 0.400780 1992:01-1992:12 0.432417 0.476136 1993:01-1993:12 0.419583 0.239348 1994:01-1994:12 0.387667 0.284007 1995:01-1995:12 0.402833 0.319041 1995:01-1996:12 0.312333 0.237868 ================================
Se realiza un gráfico de dispersión de la media y la desviación estándar de laprimera diferencia del indice de precio al consumidor y se deduce que la primeradiferencia del indice de precio al consumidor es estacionaria en varianza porque sepuede aproximar a una línea horizontal.

0.0
0.1
0.2
0.3
0.4
0.5
0.0 0.1 0.2 0.3 0.4 0.5
MEDIA
DS
por lo tanto, el valor de igual a uno.λ
III.- Identificar p y q
La identificación del proceso estocástico consiste en comparar el comportamientode las funciones de autococrrelación muestral con las funciones de autocorrelaciónteóricas correspondientes a distintos modelos teóricos con los que puede guardarsimilitud, teniendo en cuenta que nunca cabe esperar una similitud perfecta debido aerrores de muestreo.
Las características de las funciones de autocorrelación de los modelos teóricosson:
F. A.
MODELOAC PAC
AR(p)
Decrecimiento rápido de tipogeomét r i co pu ro , ygeométrico con alteración designos, sinusoidal o mezclade varios de tipos.
Se anula por retardossuperiores a p.
MA(q)Se anula para retardossuperiores a q.
Decrecimiento rápido de tipoexponencial y / o sinusoidal.
ARMA(p,q)
Los primeros valoresiniciales no tienen patrón fijoy van seguidos de unamezcla de oscilacioness inuso ida les y / oexponenciales amortiguadas.
Los primeros valoresiniciales no tienen patrón fijoy van seguidos de unamezcla de oscilacioness inuso ida les y / oexponenciales amortiguadas.
Por lo tanto, para identificar p se observa la función de autocorrelación parcial(PAC) y para identificar q se observa la función de autocorrelación simple (AC).
EJEMPLO: El correlograma de la primera diferencia del IPC con 36 retardos es:
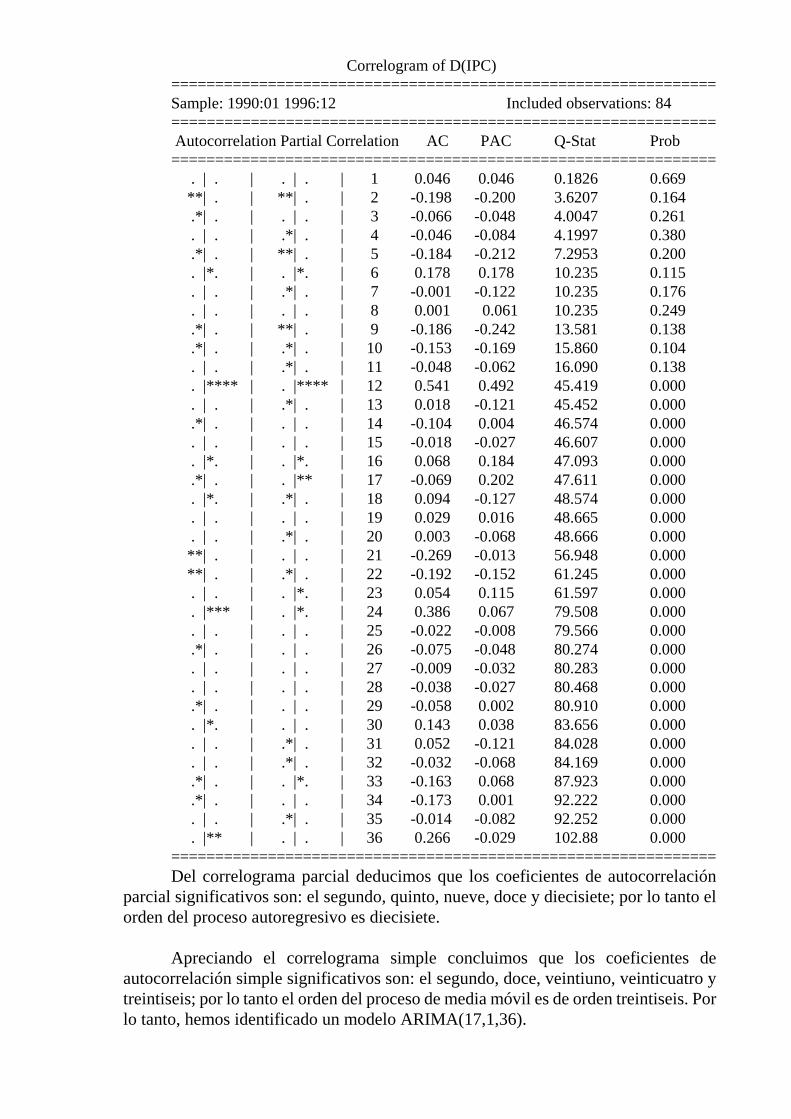
Correlogram of D(IPC)==============================================================Sample: 1990:01 1996:12 Included observations: 84============================================================== Autocorrelation Partial Correlation AC PAC Q-Stat Prob============================================================== . | . | . | . | 1 0.046 0.046 0.1826 0.669 **| . | **| . | 2 -0.198 -0.200 3.6207 0.164 .*| . | . | . | 3 -0.066 -0.048 4.0047 0.261 . | . | .*| . | 4 -0.046 -0.084 4.1997 0.380 .*| . | **| . | 5 -0.184 -0.212 7.2953 0.200 . |*. | . |*. | 6 0.178 0.178 10.235 0.115 . | . | .*| . | 7 -0.001 -0.122 10.235 0.176 . | . | . | . | 8 0.001 0.061 10.235 0.249 .*| . | **| . | 9 -0.186 -0.242 13.581 0.138 .*| . | .*| . | 10 -0.153 -0.169 15.860 0.104 . | . | .*| . | 11 -0.048 -0.062 16.090 0.138 . |**** | . |**** | 12 0.541 0.492 45.419 0.000 . | . | .*| . | 13 0.018 -0.121 45.452 0.000 .*| . | . | . | 14 -0.104 0.004 46.574 0.000 . | . | . | . | 15 -0.018 -0.027 46.607 0.000 . |*. | . |*. | 16 0.068 0.184 47.093 0.000 .*| . | . |** | 17 -0.069 0.202 47.611 0.000 . |*. | .*| . | 18 0.094 -0.127 48.574 0.000 . | . | . | . | 19 0.029 0.016 48.665 0.000 . | . | .*| . | 20 0.003 -0.068 48.666 0.000 **| . | . | . | 21 -0.269 -0.013 56.948 0.000 **| . | .*| . | 22 -0.192 -0.152 61.245 0.000 . | . | . |*. | 23 0.054 0.115 61.597 0.000 . |*** | . |*. | 24 0.386 0.067 79.508 0.000 . | . | . | . | 25 -0.022 -0.008 79.566 0.000 .*| . | . | . | 26 -0.075 -0.048 80.274 0.000 . | . | . | . | 27 -0.009 -0.032 80.283 0.000 . | . | . | . | 28 -0.038 -0.027 80.468 0.000 .*| . | . | . | 29 -0.058 0.002 80.910 0.000 . |*. | . | . | 30 0.143 0.038 83.656 0.000 . | . | .*| . | 31 0.052 -0.121 84.028 0.000 . | . | .*| . | 32 -0.032 -0.068 84.169 0.000 .*| . | . |*. | 33 -0.163 0.068 87.923 0.000 .*| . | . | . | 34 -0.173 0.001 92.222 0.000 . | . | .*| . | 35 -0.014 -0.082 92.252 0.000 . |** | . | . | 36 0.266 -0.029 102.88 0.000==============================================================Del correlograma parcial deducimos que los coeficientes de autocorrelación
parcial significativos son: el segundo, quinto, nueve, doce y diecisiete; por lo tanto elorden del proceso autoregresivo es diecisiete.
Apreciando el correlograma simple concluimos que los coeficientes deautocorrelación simple significativos son: el segundo, doce, veintiuno, veinticuatro ytreintiseis; por lo tanto el orden del proceso de media móvil es de orden treintiseis. Porlo tanto, hemos identificado un modelo ARIMA(17,1,36).

H u
H u0
1
0
0
:
:
=≠
tY
S
T
tY
T=
−
≈ −2 0 05 1
1
. ( )
S
Tp p pY
k
2
1 21 2 2 2( ..... )+ + + +
IV.- Determinar el término independiente
Si los datos de una serie proceden de un muestreo aleatorio simple sobre unapoblación normal, es decir, si los datos constituyen una realización de un proceso deruido blanco con media distinta de cero; entonce el contraste es:
La hipótesis es:
el estadístico es:
si el estadístico es menor que el de la tabla entonces se acepta la hipótesis nula, oviceversa.
Cuando los datos están autocorrelacionados, como ocurre en un proceso ARIMA,dicho estimador no resulta válido por ser inconsistente. En este caso, el estimador de lavarianza de la media muestral puede aproximarse mediante la siguiente expresión:
seleccionando k de forma que se incluyan los coeficientes que sean significativos.Cuando se obtiene un resultados negativo no es aplicable.
EJEMPLO:
Aplicando en el Eview la instrucción siguiente:Show D(IPC) View Tests for Descriptive Stats Simple Hypothesis Tests⇒ ⇒ ⇒
se escribe cero en Mean OK⇒ ⇒el software nos muestra el resultado siguiente:
Hypothesis Testing for D(IPC) Sample: 1990:01 1996:12 Included observations: 84 ==============================================Test of Hypothesis: Mean = 0.000000 ==============================================Sample Mean = 0.407048 Sample Std. Dev. = 0.337263
Method Value Probabilityt-statistic 11.06157 0.0000
==============================================

H u
H u0
1
0
0
:
:
=≠
t t= < =1106157 1988959780 05 83. .. ( )
S tt
T
( , )φ θ ε==∑ 2
1
ε φ δ
ε φ δt t
td
t
B Y
B Y
= − ⇒
= − ⇒
( )
( )
AR(p)
ARI(p,d,0)∆
ε θ δ
ε θ δ
ε θ φ δ
ε θ φ δ
t t
td
t
t t
td
t
B Y
B Y
B B Y
B B Y
= − ⇒
= − ⇒
= − ⇒
= − ⇒
−
−
−
−
( ) ( )
( ) ( )
( ) ( ( ) )
( ) ( ( ) )
1
1
1
1
MA(q)
IMA(0,d,q)
ARMA(p,q)
ARIMA(p,d,q)
∆
∆
La hipótesis es:
el estadístico es:
por lo tanto, se rechaza la hipótesis nula. Es decir, el modelo tiene intercepto.
8.2. ESTIMACIÓN
El objetivo es hallar un vector de parámetros autoregresivos y un vector de parámetros de media móvilφ φ φ φ= ( , ,..., )1 2 p
que minimicen la suma de los cuadrados de los errores:θ θ θ θ= ( , ,..., )1 2 q
Los modelos los podemos agrupar en dos:
1º El modelo autoregresivo de orden p y el modelo integrado autoregresivo deorden (p,d,0) que se pueden expresar de la siguiente forma:
tenemos que existe linealidad en parámetros y en variables, por lo tanto, elmétodo de estimación adecuado es mínimos cuadrados ordinarios.
2º Los modelos de media móvil de orden q, autoregresivo de media móvil de orden(p,q), integrado de media móvil de orden (0,d,q) y el modelo autoregresivointegrado de media móvil de orden (p,d,q) que se pueden expresar de la formasiguiente:
esta estimación es difícil, puesto que:
1º existe no linealidad respecto a los parámetros, entonces hay que usar unmétodo iterativo de estimación no lineal; como por ejemplo, mínimoscuadrados no lineales.

2º el primer término de error en la serie depende de los valores pasados y noobservados tanto de la serie como de los residuos, entonces hay que usaralgún método para "iniciar" la serie antes de aplicar el proceso deestimación no lineal.
EJEMPLO:
Vamos a estimar el modelo identificado en la primera etapa, entonces en elEview la instrucción será:
LS D(IPC) C AR(2) AR(5) AR(9) AR(12) AR(17) MA(2) MA(12)MA(21) MA(24) MA(36)
el software nos muestra el resultado siguiente:
Dependent Variable: D(IPC) Method: Least Squares Sample: 1990:01 1996:12 Included observations: 84 Convergence achieved after 12 iterations Backcast: 1987:01 1989:12 =================================================== Variable Coefficient Std. Error t-Statistic Prob. =================================================== C 0.391999 0.030395 12.89674 0.0000 AR(2) -0.111367 0.077757 -1.432242 0.1563 AR(5) -0.241520 0.090560 -2.666954 0.0094 AR(9) -0.142188 0.061791 -2.301134 0.0242 AR(12) 0.727170 0.076908 9.454997 0.0000 AR(17) 0.100439 0.091284 1.100285 0.2748 MA(2) 0.052647 0.110208 0.477701 0.6343 MA(12) -0.439483 0.136380 -3.222487 0.0019 MA(21) -0.182570 0.110103 -1.658166 0.1016 MA(24) 0.329299 0.124243 2.650444 0.0099 MA(36) 0.204430 0.146489 1.395533 0.1671 ===================================================R-squared 0.682469 Mean dependent var 0.407048 Adjusted R-squared 0.638972 S.D. dependent var 0.337263 S.E. of regression 0.202646 Akaike info criter -0.233161 Sum squared resid 2.997785 Schwarz criterion 0.085160 Log likelihood 20.79278 F-statistic 15.68989 Durbin-Watson stat 1.841697 Prob(F-statistic) 0.000000 =================================================== Inverted AR Roots .95 .85+.49i .85 -.49 .54+.40i .54 -.4 .49+.85i .49 -.85 -.03 -.98i -.03+.98 -.21+.65i -.21 -.65 -.47+.84i -.47 -.8 -.66 -.83+.50i -.83 -.50i -.99 Inverted MA Roots .97+.08 .97 -.08 .89 -.25 .89+.25i .88 -.4 .88+.41i .81 -.56 .81+.56i .64 -.6 .64+.65i .57+.80i .57 -.80i .41+.90 .41 -.90 .24+.87i .24 -.87i

ρ k TN≈ ∀( , )0 1 k
ρ ρk kTT
< <196196
..
o
H
Ht
t
0
1
:
:
es ruido blanco
no es ruido blanco
εε
.08+.99 .08 -.99 -.09+.97i -.09 -.97i -.23 -.8 -.23+.89i -.42 -.88 -.42+.88i -.55+.81 -.55 -.81 -.66 -.65 -.66+.65i -.79+.56 -.79 -.56 -.88+.23i -.88 -.23i -.89+.42 -.89 -.42 -.98+.09i -.98 -.09i ===================================================
8.3. VALIDACIÓN
Si el modelo estimado superase satisfactoriamente las etapas del proceso devalidación, se estaría en condiciones de utilizarlo en la predicción de valores futuros dela variable.
1º Análisis de los residuos
1.1. Análisis de los coeficientes de autocorrelación simple
(A) ANDERSON
Según ha demostrado Anderson (1942) los coeficientes deautocorrelación muestrales procedentes de un proceso de ruido blanco sedistribuyen, en muestras grandes, de la siguiente forma:
entonces bajo la hipótesis:
si tenemos que:
Por lo tanto, se acepta la hipótesis nula.
Para que una serie de residuos se asemeje a una serie de ruidoblanco, los coeficientes de autocorrelación simple muestral (AC) y loscoeficientes de autocorrelación parcial muestral (PAC) no deben sersignificativamente distintos de cero. El problema es que no conocemos
, entonces utilizamos ; si el comportamiento de los residuos seε t$ε t
asemeja al de una serie de ruido blanco, existirá una adecuación entre elmodelo identificado y los datos.
(B) PANKRATZ
En la práctica, se construyen bandas de confianza utilizando ladistribución de una variable ruido blanco cuya varianza aproximada,

ρ ρ
ρ ρ
k k
k k
TT
TT
< <
< < ≥
125125
160160
..
..
o para k = 1, 2, 3.
o para k 4.
H
Ht
t
0
1
:
:
es ruido blanco
no es ruido blanco
εε
viene dada por 1/T. Sin embargo, este valor no constituye una buenaaproximación ya que la distribución no es aplicable a los coeficientes deautocorrelación de una serie de residuos, especialmente en los retardos deorden bajo.
Pankratz (1983) considera que bajo la hipótesis:
si tenemos que:
Por lo tanto, se acepta la hipótesis nula.
EJEMPLO:
En el Eviews se obtiene para 20 retardos el Correlograma de los residuossiguiente:
Correlogram of Residuals==============================================================Sample: 1990:01 1996:12 Included observations: 84Q-statistic probabilities adjusted for 10 ARMA term(s) ============================================================== Autocorrelation Partial Correlation AC PAC Q-Stat Prob============================================================== . |*. | . |*. | 1 0.075 0.075 0.4874 . | . | . | . | 2 -0.002 -0.007 0.4876 . | . | . | . | 3 0.001 0.002 0.4877 .*| . | .*| . | 4 -0.101 -0.102 1.4147 .*| . | . | . | 5 -0.063 -0.048 1.7756 . | . | . | . | 6 -0.034 -0.028 1.8853 . |*. | . |*. | 7 0.130 0.138 3.4733 . | . | . | . | 8 0.054 0.026 3.7486 .*| . | .*| . | 9 -0.125 -0.146 5.2643 . | . | . | . | 10 0.013 0.021 5.2820 .*| . | .*| . | 11 -0.103 -0.087 6.3296 0.012 .*| . | . | . | 12 -0.060 -0.021 6.6939 0.035 . | . | . | . | 13 -0.026 -0.034 6.7630 0.080 . |*. | . | . | 14 0.074 0.059 7.3290 0.119 . |** | . |*. | 15 0.200 0.166 11.500 0.042 . |*. | . |*. | 16 0.103 0.103 12.627 0.049 . | . | . | . | 17 0.040 0.015 12.801 0.077 .*| . | **| . | 18 -0.179 -0.204 16.289 0.038 . | . | . | . | 19 -0.018 0.065 16.324 0.060 .*| . | . | . | 20 -0.058 -0.036 16.707 0.081==============================================================

H
Hk
k
0 1 2
1 1 2
0
0
: ....
: ....
ρ ρ ρρ ρ ρ
= = = = ≡≠ ≠ ≠ ≠ ≡
Residuos independientes
Residuos no independientes
H
H0 1 2 20
1 1 2 20
0
0
: ....
: ....
ρ ρ ρρ ρ ρ
= = = = ≡≠ ≠ ≠ ≠ ≡
Residuos independientes
Residuos no independientes
Q TBP ii
k
k p q= ≈=
− −∑ρ χ2
1
2
Q TBP ii
= ==
−∑ ρ χ2
1
20
0 05 20 102 18 307038 = 13.84866 < ( . , ) .
Según Anderson ninguno de los coeficientes de autocorrelación estimados
supera ;por lo tanto, los residuos del modelo estimado son ruido1 9684 0 213853. .=
blanco.
De acuerdo a Pankratz los tres primeros coeficientes de autocorrelación
estimados son menores a y el resto de coeficientes de1 2584 0136386. .=
autocorrelación estimados son menores a , excepto el quince y1 6084 0174574. .=
el dieciocho; por lo tanto, los residuos del modelo estimado no son ruido blanco.
1.2. Contraste Global
Se utiliza el estadístico propuesto por Box y Pierce (1970). La hipótesises:
el estadístico es:
si el estadístico es menor al de la tabla se acepta la hipótesis nula, o viceversa.
EJEMPLO:
Tenemos:
comparamos:
Por lo tanto, se acepta la hipótesis nula; es decir, los residuos sonindependientes o están incorrelacionados.
1.3. Homocedasticidad
Hay que examinar el gráfico de los residuos (ploteo). Si se advierte unatendencia creciente (o decreciente) en la evolución de dicha dispersión seráindicativo de una posible heterocedasticidad.
EJEMPLO: Aplicando en el Eview la instrucción siguiente:
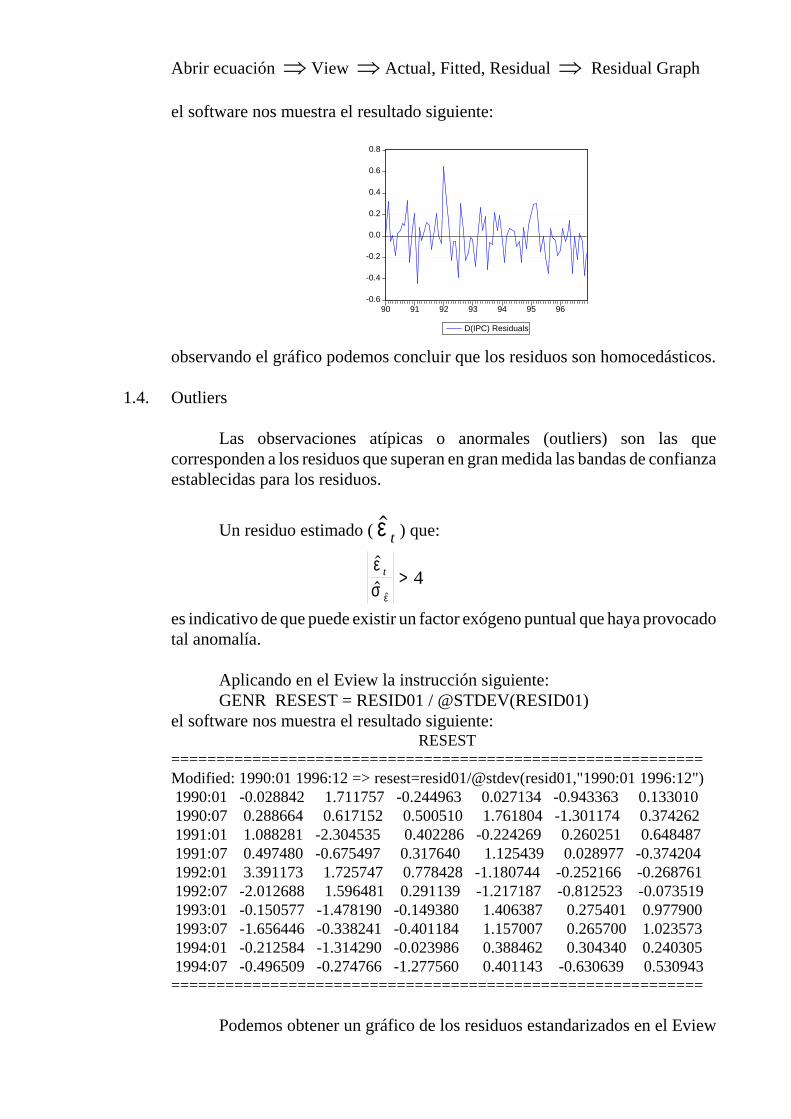
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
90 91 92 93 94 95 96
D(IPC) Residuals
$
$$
εσ ε
t > 4
Abrir ecuación View Actual, Fitted, Residual Residual Graph⇒ ⇒ ⇒
el software nos muestra el resultado siguiente:
observando el gráfico podemos concluir que los residuos son homocedásticos.
1.4. Outliers
Las observaciones atípicas o anormales (outliers) son las quecorresponden a los residuos que superan en gran medida las bandas de confianzaestablecidas para los residuos.
Un residuo estimado ( ) que:$ε t
es indicativo de que puede existir un factor exógeno puntual que haya provocadotal anomalía.
Aplicando en el Eview la instrucción siguiente:GENR RESEST = RESID01 / @STDEV(RESID01)
el software nos muestra el resultado siguiente: RESEST
===========================================================Modified: 1990:01 1996:12 => resest=resid01/@stdev(resid01,"1990:01 1996:12")
1990:01 -0.028842 1.711757 -0.244963 0.027134 -0.943363 0.133010 1990:07 0.288664 0.617152 0.500510 1.761804 -1.301174 0.374262 1991:01 1.088281 -2.304535 0.402286 -0.224269 0.260251 0.648487 1991:07 0.497480 -0.675497 0.317640 1.125439 0.028977 -0.374204 1992:01 3.391173 1.725747 0.778428 -1.180744 -0.252166 -0.268761 1992:07 -2.012688 1.596481 0.291139 -1.217187 -0.812523 -0.073519 1993:01 -0.150577 -1.478190 -0.149380 1.406387 0.275401 0.977900 1993:07 -1.656446 -0.338241 -0.401184 1.157007 0.265700 1.023573 1994:01 -0.212584 -1.314290 -0.023986 0.388462 0.304340 0.240305 1994:07 -0.496509 -0.274766 -1.277560 0.401143 -0.630639 0.530943===========================================================
Podemos obtener un gráfico de los residuos estandarizados en el Eview

-3
-2
-1
0
1
2
3
4
90 91 92 93 94 95 96
RESEST
H0 : u se aproxima a una distribución normalH1 : u no se aproxima a una distribución normal
0
4
8
12
16
-0.4 -0.2 0.0 0.2 0.4 0.6
Series: ResidualsSample 1990:01 1996:12Observations 84
Mean -0.002458Median -0.002510Maximum 0.644428Minimum -0.437933Std. Dev. 0.190031Skewness 0.217930Kurtosis 3.717076
Jarque-Bera 2.464605Probability 0.291620
JBN k
S K=−
+ −6
32 14
2( ( ) )
JB < =( . , )
.0 05 2
2599χ
con la instrucción siguiente:Abrir RESEST View Line Graph⇒ ⇒
el software nos muestra el resultado siguiente:
De la observación del cuadro o del gráfico de los residuos estandarizadosse concluye que no existe ninguna observación atípica.
1.5. Normalidad
Se plantea la siguiente hipótesis:
se utiliza el estadístico Jarque - Bera, cuya fórmula es:
se tiene la siguiente regla de decisión:
entonces, a un nivel de significancia del 5 % lo residuos se aproximan a unadistribución normal.
El test de normalidad lo obtenemos de la siguiente forma para la ecuaciónestimada:Abrir EQ1 View Residual Tests Histogram - Normality Test ⇒ ⇒ ⇒ ⇒OK, obteniéndose el siguiente resultado:
entonces, a un nivel de significancia del 5 % lo residuos se aproximan a unadistribución normal.

H
Hi
i
0
1
0
0
:
:
φ φφ φ
= ≡≠ ≡
no es significativo
si es significativoi
i
ti
i
iφ
φδ
φσ
= ≈ =$
$$
t(0.05,T-p-q- ) 2
2º Análisis de los coeficientes
2.1. Condición de Estacionariedad e Invertibilidad
Una cuestión importante en el análisis de los coeficientes es el examen desi se cumplen las condiciones de estacionariedad y de invertibilidad.
Se tiene dos casos:
1º Si no se cumple la condición de estacionariedad, entonces es un indiciode que el modelo no es estacionario, siendo aconsejable en este casotomar una diferencia adicional.
2º Si no se cumple la condición de invertibilidad, entonces este problema seha podido producir como consecuencia de una sobrediferenciación.
EJEMPLO:
Al final de la estimación observamos las raíces características de losprocesos autoregresivo y de media móvil, asimismo el Eview nos muestra uncomentario si la condición no se cumple. En este caso no existe ningúncomentario, por lo tanto, las condiciones de estacionariedad y de invertibilidadse cumplen.
2.2. Significancia de los coeficientes
Los modelos ARIMA se aplican en general a muestras grandes, entoncesse puede utilizar los niveles de significación de la normal. Se tiene:
el estadístico es:
si el estadístico es menor al de la tabla se acepta la hipótesis nula, o viceversa.
EJEMPLO:
De los resultados obtenidos de la estimación del modelo concluimos que son significativos porque son mayores a 2; mientras que losφ φ φ θ θ5 9 12 12 24, , , y
coeficientes son no significativos porque son menores a 2.φ φ θ θ θ2 17 36, , , y 2 21
2.3. Examen de la matriz de correlaciones entre los coeficientes
El objetivo es detectar si existe un problema de mutlticolinealidad.

ri j
i j
i j
i j
i j
$ $
$ $
$ $
cov($ $ )
var($ ) var($ )φ φ
φ φ
φ φ
φ φ
φ φ
σ
σ σ= =
r
r
r
r
$ $
$ $
$ $
$ $
$ $
$ $
$ $
$ $
$ $
$ $
$ $
$ $
.
. ( . ).
.
. ( . ).
.
. ( . ).
.
.
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
φ φ
σ
σ σ
σ
σ σ
σ
σ σ
σ
σ σ
2 5
2 5
2 5
2 9
2 9
2 9
2 12
2 12
2 12
2 17
2 17
2 17
0 000321
0 077757 0 090560 04558575
0 000725
0 077757 0 061791015089445
0 01389
0 077757 0 0769080 23226899
0 00000903
0
= = =
= = =
= = =
= =−
077757 0 0912840 00127219
0 004984
0 077757 0110208058160136
0 002169
0 077757 0136380 20453581
2 2
2 2
2 2
2 12
2 12
2 12
( . ).
.
. ( . ).
.
. ( . ).
$ $
$ $
$ $
$ $
$ $
$ $
= −
= =−
= −
= =−
= −
r
r
φ θ
φ θ
φ θ
φ θ
φ θ
φ θ
σ
σ σ
σ
σ σ
Cuando la correlación entre dos coeficientes estimados esté próximo a uno(ejemplo: 0.9) sería indicio suficiente para considerar que existe un problemagrave de multicolinealidad. Si esto ocurre, los coeficientes estimados serían decarácter muy inestables con lo que podrían cambiar mucho de una realización aotra.
Así, el modelo estimado para el período muestral puede diferir del que seobtendría para los periodos de predicción. Para evitar este problema puede serconveniente eliminar algún parámetro del modelo con objeto de conseguir unosestimadores más estables aun a coste de que el grado de ajuste sea más pequeño.
Si todos los coeficientes son significativos a pesar de que lamulticolinealidad sea elevada, tampoco sería aconsejable eliminar coeficientesdel modelo. En todo caso, la eliminación de parámetros no debe hacerse aexpensas de que se pierda la independencia entre los residuos.
EJEMPLO:
El coeficiente de correlación entre dos coeficientes se define:
la información requerida para calcular estos coeficientes se encuentra en laestimación del modelo.
Tenemos que calcular 45 coeficientes de correlación entre coeficientes,vamos a calcular algunos de ellos de la siguiente forma:
si todos los coeficientes de correlación de los coeficientes son no significativos,entonces no existe multicolinealidad grave.
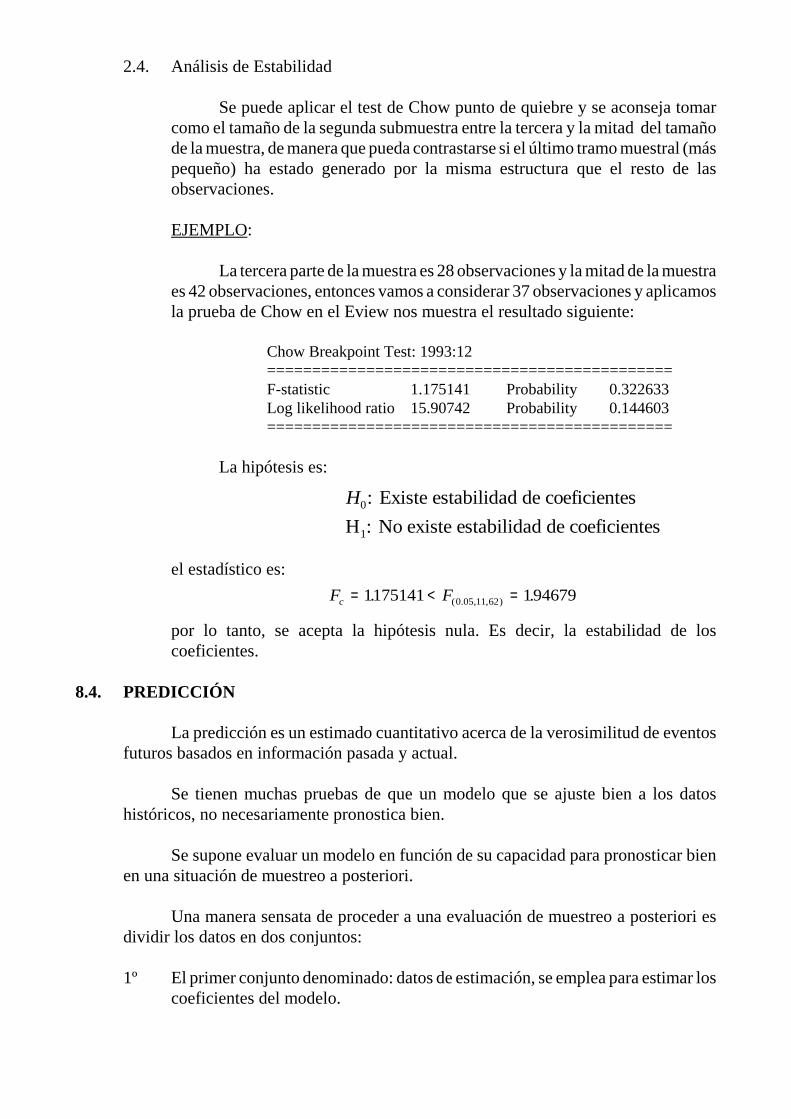
H0:
:
Existe estabilidad de coeficientes
H No existe estabilidad de coeficientes1
F Fc = < =1175141 1946790 05 11 62. .( . , , )
2.4. Análisis de Estabilidad
Se puede aplicar el test de Chow punto de quiebre y se aconseja tomarcomo el tamaño de la segunda submuestra entre la tercera y la mitad del tamañode la muestra, de manera que pueda contrastarse si el último tramo muestral (máspequeño) ha estado generado por la misma estructura que el resto de lasobservaciones.
EJEMPLO:
La tercera parte de la muestra es 28 observaciones y la mitad de la muestraes 42 observaciones, entonces vamos a considerar 37 observaciones y aplicamosla prueba de Chow en el Eview nos muestra el resultado siguiente:
Chow Breakpoint Test: 1993:12 =============================================F-statistic 1.175141 Probability 0.322633 Log likelihood ratio 15.90742 Probability 0.144603 =============================================
La hipótesis es:
el estadístico es:
por lo tanto, se acepta la hipótesis nula. Es decir, la estabilidad de loscoeficientes.
8.4. PREDICCIÓN
La predicción es un estimado cuantitativo acerca de la verosimilitud de eventosfuturos basados en información pasada y actual.
Se tienen muchas pruebas de que un modelo que se ajuste bien a los datoshistóricos, no necesariamente pronostica bien.
Se supone evaluar un modelo en función de su capacidad para pronosticar bienen una situación de muestreo a posteriori.
Una manera sensata de proceder a una evaluación de muestreo a posteriori esdividir los datos en dos conjuntos:
1º El primer conjunto denominado: datos de estimación, se emplea para estimar loscoeficientes del modelo.

( )E uu si t T
si t Tt
t== ≤= >
$
0
( )$
$
Y Y E u Y
Y Y Y
T T T T
T T T
+ +
+ +
= + =
= =1 1 1 1
2 1 1 12
φ φ
φ φ
$Y YT ii
T+ = φ1
( ) ( )( ) ( )
$ $
$ $ .....
Y E u E u u
Y E u E u Y
T T T T
T T T T
+ +
+ + + +
= − = −
= − = = =1 1 1 1
2 2 1 1 30
θ θ
θ
( )$
$ $
$ $ $
$ $ $
Y Y Y E u Y Y
Y Y Y
Y Y Y
Y Y Y
T T T T T T
T T T
T T T
T T T
+ − + −
+ +
+ + +
+ + +
= + + = +
= +
= +
= +
1 1 2 1 1 1 2 1
2 1 1 2
3 1 2 2 1
4 1 3 2 2
φ φ φ φ
φ φφ φφ φ
( ) ( ) ( )( ) ( ) ( )
$ $ $
$ $
$ . $ ....
Y E u E u E u u u
Y E u E u E u u
Y Y
T T T T T T
T T T T T
T T
+ + − −
+ + +
+ +
= − − = − −
= − − = −
= = =
1 1 1 2 1 1 2 1
2 2 1 1 2 2
3 40
θ θ θ θ
θ θ θ
2º Los puntos de los datos restantes, denominados datos de predicción, se empleapara medir la exactitud del pronóstico del modelo.
Las predicciones de la serie estacionaria son fáciles de obtener como veremosYt
con varios modelos ARMA sencillos, teniendo en cuenta que el valor esperado del ruidoblanco es:
Sea , o sea . Las previsiones son:( )Y ARt ∈ 1 Y Y ut t t= +−φ1 1
y en general
Se considera ahora un modelo , o sea ; las primeras( )Y MAt ∈ 1 Y u ut t t= − −θ1 1
predicciones son:
o sea que la estructura d medias móviles de orden 1 sólo influirá en la primerapredicción.
Con el modelo AR(2), se tienen las predicciones:
y así sucesivamente.
Se considera ahora un modelo , es:( )Y MAt ∈ 2
o sea que las predicciones se anulan después de dos unidades temporales.

( ) ( )$ $
$ $
$ $
Y Y E u E u Y u
Y Y
Y Y
T T T T T T
T T
T T
+ +
+ +
+ +
= + − = −
=
=
1 1 1 1 1 1
2 1 1
3 1 2
φ θ φ θ
φφ
e Y YT i T T i+ + += −1$
( ) ( ) ( )Var e E eT i
i= = + + + ++
−212
14
12 2 21 ϕ ϕ ϕ σ ε...
( )( ) ( )
Var e
Var e i
T
T i
+
+
=
= + ∀ >1
2
12 21 1
σ
θ σε
ε
Sea el modelo , es:( )Y ARMAt ∈ 11,
así sucesivamente se obtendrían las demás predicciones, o sea que la parte de mediamóvil sólo influye directamente sobre la primera predicción y a partir de la segunda,éstas se obtienen como en un modelo AR(1).
En el modelo ARIMA, es necesario deshacer las transformaciones en diferenciasy de Box - Cox para obtener las previsiones de la variable .Yt
El error de predicción se obtiene a partir de la expresión:
En el modelo AR(1), la varianza de predicción es:
es decir, aumenta (en forma no lineal) a medida que crece i.
En un proceso MA(1) la varianza es:
es idéntica para la predicción para el periodo segundo, tercero, etc.
I.- TIPOS DE PRONÓSTICO
1º Puntual se trata de la predicción de los valores futuros de la variableendógena en términos de un único valor o número.
2º Por intervalo cuando el valor futuro predicho de la variable endógena seexpresa dentro de un intervalo determinado.
II.- CLASIFICACIÓN DE PRONÓSTICO
1º Predicciones incondicionales cuando se conocen con certeza los valores delas variables.
2º Predicciones condicionales cuando uno o más variables independientesno se conocen con certeza y deben serestimados.

RECMH
ett T
T H
== +
+
∑1 2
1
$
EMAe
H
tt T
T H
= = +
+
∑ $
1
EPMAH
e
Yt
tt T
T H
== +
+
∑1
1
$
3º Predicciones ex ante predicciones más allá del período deestimación y son hechos usando variablesexplicativas que pueden o no ser conocidascon certeza.
4º Predicciones ex post cuando las observaciones, tanto de la variabledependiente como de las independientes, sonconocidas con certeza.
III.- CRITERIOS PARA EVALUAR LA CAPACIDAD PREDICTIVA DE UNMODELO
1º RAÍZ DEL ERROR CUADRÁTICO MEDIO (RECM)
Se define como:
Tiene las mismas unidades de medición que las series reportadas. Lafunción de pérdida implícita con el RCEM es cuadrática, entonces la pérdidaasociada con un error aumenta en proporción con el cuadrado del error.
La desventaja de esta medida es que es una medición absoluta, quedepende de las unidades de medida.
2º ERROR ABSOLUTO MEDIO (EMA)
Se define como:
Esta medida es apropiada siempre que la función de pérdida es lineal ysimétrica.
3º MEDIA DEL VALOR ABSOLUTO DEL ERROR PORCENTUAL (EPMA)
Se define como:
Es similar al EMA, excepto que es una medida relativa. Presenta un sesgoque favorece a los pronósticos que se encuentran por debajo de los valoresreportados.
RCREMH
e
Yt
tt T
T H
== +
+
∑1 2
1
$
UH
Y Y
HY
HY
t tt T
T H
tt T
T H
tt T
T H=
−
+
= +
+
= +
+
= +
+
∑
∑ ∑
1
1 1
2
1
2
1
2
1
( $ )
$
Indica qué proporción del error verdadero estimado es error de predicción.
4º RAÍZ CUADRADA RELATIVA DEL ERROR MEDIO (RCREM)
Se define como:
Es similar a RECM, excepto que es adimensional. Presenta un sesgo quefavorece a los pronósticos que se encuentran por debajo del valor reportado.Considerar el resultado satisfactorio si tiene un valor inferior a tres.
5º COEFICIENTE DE DESIGUALDAD DE THEIL
Denominado U de Theil (1961), se define:
no está influenciado por problemas de escala. U oscila entre 0 y 1.
Si U tiende a cero, el modelo puede ser utilizado para predecir dado quesus pronósticos serán fiables.
Si U tiende a uno, el modelo no sirve para predecir sus pronósticos no sonreales.
El U de Theil se descompone:SESGO + VARIANZA + COVARIANZA = 1
1º Sesgo (Bias Proportion) indica la presencia de algúnerror sistemático. El sesgodebe ser cero, en casocontrario el pronóstico no es elmás confiable.
2º Varianza(Variance Proportion) indica la habilidad delpronóstico para replicar elcomportamiento de la variablereal observada. Si estaproporción es grande significaque el modelo posee menorcapacidad para replicar elcomportamiento de la serie.
120
121
122
123
124
125
126
127
97:01 97:03 97:05 97:07 97:09 97:11
IPCF ± 2 S.E.
Forecast: IPCFActual: IPCForecast sample: 1997:01 1997:Included observations: 12
Root Mean Squared Error 0.807782Mean Absolute Error 0.698349Mean Abs. Percent Error 0.571336Theil Inequality Coefficient 0.003281 Bias Proportion 0.747406 Variance Proportion 0.068465 Covariance Proportion 0.184129
D IPC t D IPC t D IPC t D IPC t D IPC t t t
t t t t
( ) ( ) ( ) ( ) ( )= + − + − + − + − + − −
− − − − − − − −
δ φ φ φ φ ε θ ε
θ ε θ ε θ ε θ ε
2 2 5 5 12 12 17 17 2 2
12 12 21 21 24 24 36 36
3º Covarianza (Covariance Proportion) si esta medida es alta significa
que el modelo predice bien,pues el error de la predicciónse haría pequeño.
V.- EJEMPLO
Para el análisis consideraremos el modelo siguiente:
que se estimo para la información 1990:01 - 1996:12 en el Eview, y para la evaluaciónde la capacidad predictiva se considera la información correspondiente al año 1997.
Para realizar la predicción se sigue la siguiente instrucción:Abrir ecuación Procs Forecast... Se cambia el sample a 1997:01 1997:12⇒ ⇒ ⇒
OK⇒
el software nos muestra el resultado siguiente:
siendo los valores de las predicciones: IPCF
=================================== Modified: 1997:01 1997:12 // eq01.forecast(f=actual) ipcf
1997:01 121.21531997:02 121.62021997:03 122.22161997;04 123.01451997:05 123.37291997:06 123.47621997:07 123.64361997:08 124.01381997:09 124.29411997:10 124.54231997:11 124.79901997:12 125.2210
==================================
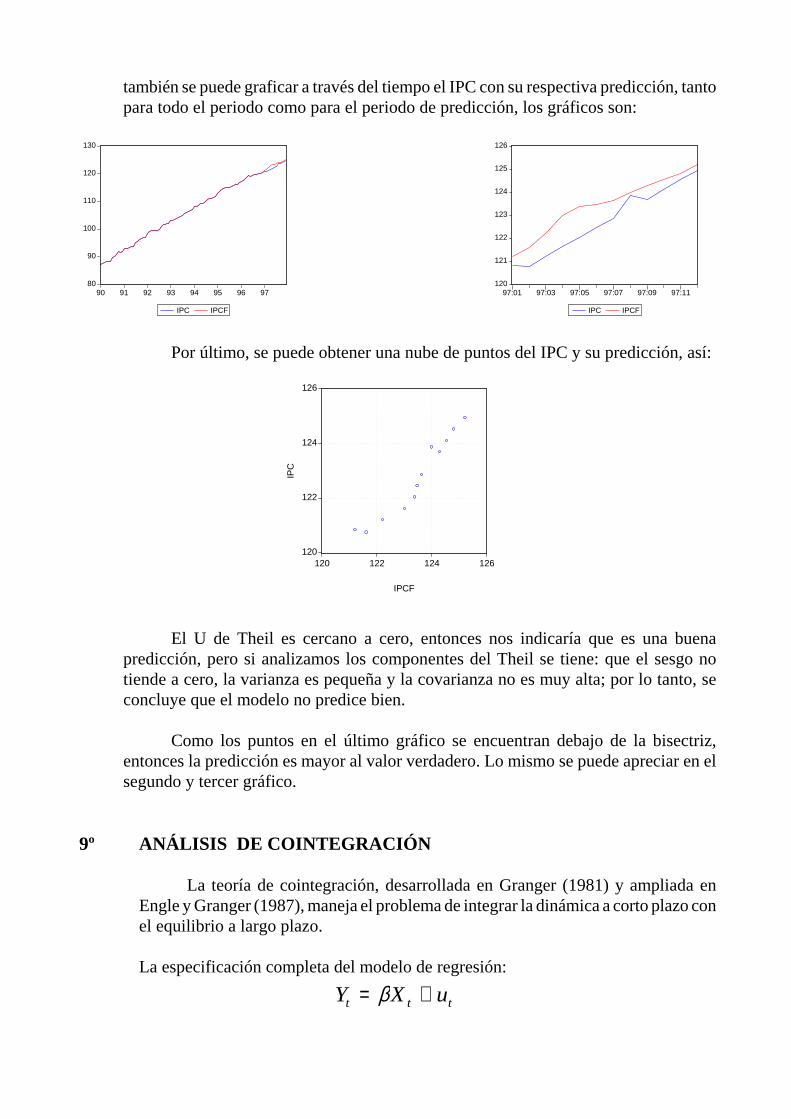
120
121
122
123
124
125
126
97:01 97:03 97:05 97:07 97:09 97:11
IPC IPCF
80
90
100
110
120
130
90 91 92 93 94 95 96 97
IPC IPCF
120
122
124
126
120 122 124 126
IPCF
IPC
Y X ut t t= +β
también se puede graficar a través del tiempo el IPC con su respectiva predicción, tantopara todo el periodo como para el periodo de predicción, los gráficos son:
Por último, se puede obtener una nube de puntos del IPC y su predicción, así:
El U de Theil es cercano a cero, entonces nos indicaría que es una buenapredicción, pero si analizamos los componentes del Theil se tiene: que el sesgo notiende a cero, la varianza es pequeña y la covarianza no es muy alta; por lo tanto, seconcluye que el modelo no predice bien.
Como los puntos en el último gráfico se encuentran debajo de la bisectriz,entonces la predicción es mayor al valor verdadero. Lo mismo se puede apreciar en elsegundo y tercer gráfico.
9º ANÁLISIS DE COINTEGRACIÓN
La teoría de cointegración, desarrollada en Granger (1981) y ampliada enEngle y Granger (1987), maneja el problema de integrar la dinámica a corto plazo conel equilibrio a largo plazo.
La especificación completa del modelo de regresión:

( )u Y X It t t= − ≈β 0
Y Xt t= β + ut
Se asume que la perturbación es una serie estacionaria (ruido blanco), peroprobablemente esto no es cierto cuando e sean series integradas.X t Yt
Generalmente, si dos series son integradas para diferentes ordenes, lascombinaciones lineales de ambas estarán integradas para el más alto de los dosordenes.
Si es integrada de orden 1 o y es integrada de orden ceroYt Y It ~ ( )1 ut
o , entonces es integrada de orden uno ou It ~ ( )0 Z Y ut t t= +.Z Y ut t t= + ~ I(1)
Supongamos que y (ambas variablesY It ~ ( )1 X It ~ ( )1tendenciales), entonces normalmente esperamos que: sea cual seaY Xt t− β ~ I(1)
el valor de , no I(0) (no estacionaria).β
Si y se mueven ambas hacia arriba con su propia tendencia, entoncesYt Xt
a menos que haya alguna relación entre esas tendencias, la diferencia entre ellasdebería estar creciendo, con otra tendencia adicional.
Si las dos series son ambas puede existir un tal que:( )I 1 β
esta diferencia entre ellas tiene que ser estable alrededor de una media fija. O que lasseries crecen simultáneamente aproximadamente a la misma tasa. Si dos seriessatisfacen estos requisitos, entonces están cointegradas.
El vector (o múltiplo de él) es un vector de cointegración. Se puede[ ]1 − βdistinguir:
1º Entre una relación de largo plazo entre y , es decir, la forma en la cualYt X t
las dos variables crecen.
2º La dinámica a corto plazo, es decir, las relaciones entre las desviaciones deYt
respecto de su tendencia a corto plazo y las deviaciones de respecto de suX t
tendencia a corto plazo.
Esto significa que la ecuación de regresión:
tiene sentido, pues y no se desvían mucho entre sí con el paso del tiempo;Yt Xt
por lo tanto, existe una relación de equilibrio a largo plazo entre ellos. Es decir, están
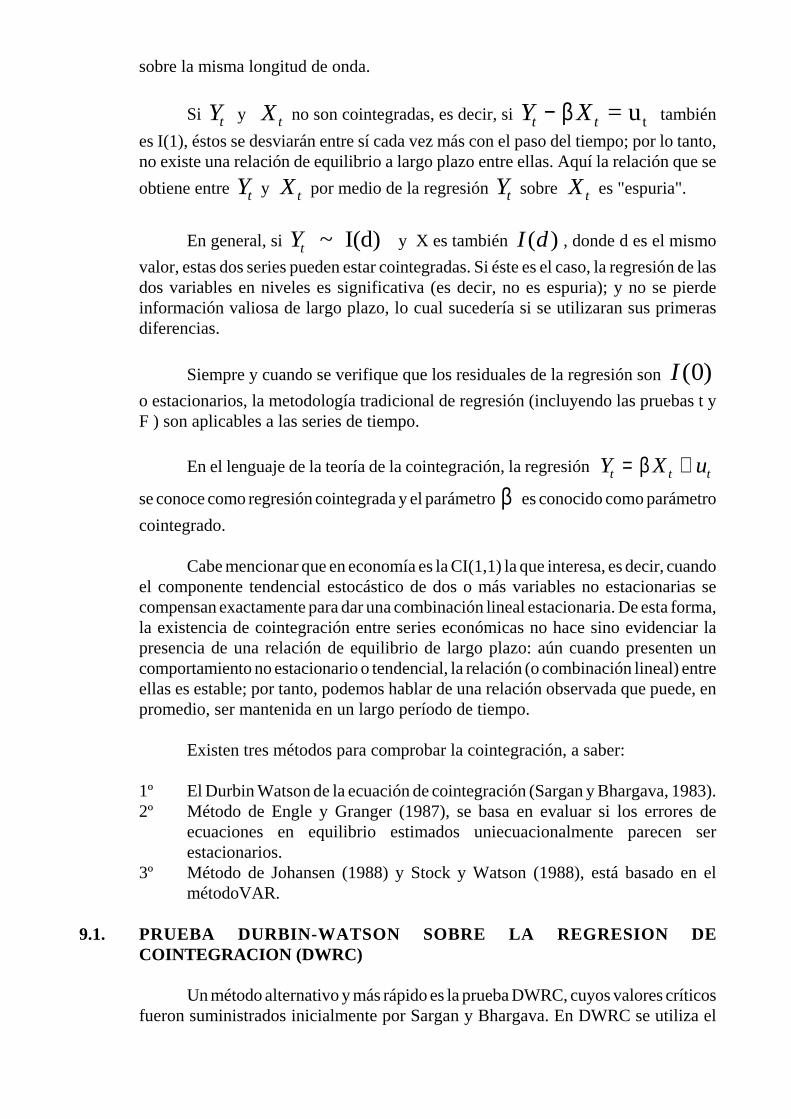
sobre la misma longitud de onda.
Si y no son cointegradas, es decir, si tambiénYt Xt Y Xt t− β = ut
es I(1), éstos se desviarán entre sí cada vez más con el paso del tiempo; por lo tanto,no existe una relación de equilibrio a largo plazo entre ellas. Aquí la relación que se
obtiene entre y por medio de la regresión sobre es "espuria".Yt Xt Yt Xt
En general, si y X es también , donde d es el mismoYt ~ I(d) I d( )valor, estas dos series pueden estar cointegradas. Si éste es el caso, la regresión de lasdos variables en niveles es significativa (es decir, no es espuria); y no se pierdeinformación valiosa de largo plazo, lo cual sucedería si se utilizaran sus primerasdiferencias.
Siempre y cuando se verifique que los residuales de la regresión son I ( )0o estacionarios, la metodología tradicional de regresión (incluyendo las pruebas t yF ) son aplicables a las series de tiempo.
En el lenguaje de la teoría de la cointegración, la regresión Y X ut t t= +βse conoce como regresión cointegrada y el parámetro es conocido como parámetroβcointegrado.
Cabe mencionar que en economía es la CI(1,1) la que interesa, es decir, cuandoel componente tendencial estocástico de dos o más variables no estacionarias secompensan exactamente para dar una combinación lineal estacionaria. De esta forma,la existencia de cointegración entre series económicas no hace sino evidenciar lapresencia de una relación de equilibrio de largo plazo: aún cuando presenten uncomportamiento no estacionario o tendencial, la relación (o combinación lineal) entreellas es estable; por tanto, podemos hablar de una relación observada que puede, enpromedio, ser mantenida en un largo período de tiempo.
Existen tres métodos para comprobar la cointegración, a saber:
1º El Durbin Watson de la ecuación de cointegración (Sargan y Bhargava, 1983).2º Método de Engle y Granger (1987), se basa en evaluar si los errores de
ecuaciones en equilibrio estimados uniecuacionalmente parecen serestacionarios.
3º Método de Johansen (1988) y Stock y Watson (1988), está basado en elmétodoVAR.
9.1. PRUEBA DURBIN-WATSON SOBRE LA REGRESION DECOINTEGRACION (DWRC)
Un método alternativo y más rápido es la prueba DWRC, cuyos valores críticosfueron suministrados inicialmente por Sargan y Bhargava. En DWRC se utiliza el
Y X ut t t= +β
u ut t t= +−ρ ε1
Q P R M ut t t t t1 1 1 10 1 2 3= + + + +β β β β
valor d de Durbin Watson obtenido de la regresión de cointegración.
Ahora la hipótesis nula es que , con base en 10,000 simulaciones, cadad = 0una de ellas conformada por 100 observaciones, los valores críticos resultantes al 1
%, 5 % y 10 % para probar la hipótesis nula es verdadera ( ) fueron 0.511,d = 00.386 y 0.322, respectivamente.
A partir de la ecuación de cointegración:
se prueba la , lo que equivale a testear que en:H DW0 0: = H0 1:ρ =
es decir, se estaría verificando la presencia de una raíz unitaria en la ecuaciónautorregresiva de . De esta forma, si no se pudiera rechazar la hipótesis nula, seut
estaría aceptando que el error es no estacionario y no se podría aceptar la presenciade cointegración entre é .X t Yt
Una regla práctica vinculada con este test de cointegración suguiere que unbuen R2 y un DW por encima de 0.5 son un indicativo de la presencia decointegración.
EJEMPLO:
Para el análisis consideraremos el modelo de demanda de gelatina siguiente:
el resultado de la estimación en el Eview es:
Dependent Variable: Q1Method: Least SquaresSample: 1985:1 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ C 457.3535 98.29010 4.653098 0.0002 P1 0.143280 1.680297 0.085270 0.9329 M1 3.893653 0.158921 24.50052 0.0000 R1 0.612120 0.108625 5.635158 0.0000============================================================R-squared 0.969154 Mean dependent var 2071.042S.E. of regression 25.42701 Akaike info criteri 9.460512Sum squared resid 12930.65 Schwarz criterion 9.656855Log likelihood -109.5261 F-statistic 209.4601Durbin-Watson stat 1.831586 Prob(F-statistic) 0.000000============================================================observando el valor del Durbin - Watson (1.831586) es superior a 0.5, entonces esindicativo de presencia de cointegración.
H0:
:
= 1
H 11
ρρ ≠
F Fc = < =18 79043 4 30094950 05 1 22. .( . , , )
Y X ut t t= +β
Aplicando la forma alternativamente tenemos que marcar los residuos de laregresión cointegrada y estimar un modelo autoregresivo de primer orden, éstoscálculos en Eviews son:
Dependent Variable: RESID01 Method: Least Squares Sample(adjusted): 1985:2 1990:4 Included observations: 23 after adjusting endpoints ============================================================ Variable Coefficient Std. Error t-Statistic Prob. ============================================================ RESID01(-1) 0.060950 0.216631 0.281352 0.7811 ============================================================R-squared 0.003210 Mean dependent var 0.458329 Adjusted R-squared 0.003210 S.D. dependent var 24.13475 S.E. of regression 24.09599 Akaike info criteri 9.244473 Sum squared resid 12773.57 Schwarz criterion 9.293842 Log likelihood -105.3114 Durbin-Watson stat 1.956895 ============================================================
En la estimación anterior View Coefficients Tests Wald -⇒ ⇒ ⇒Coefficient Restrictions ... se escribe C(1) = 0 OK⇒ ⇒
Wald Test: Equation: Untitled ====================================================Null Hypothesis C(1) = 1 ====================================================F-statistic 18.79043 Probability 0.000266 Chi-square 18.79043 Probability 0.000015 ====================================================
La hipótesis es:
el estadístico es:
por lo tanto, se rechaza la hipótesis nula. Es decir, el error es estacionario y se puedeaceptar la cointegración.
9.2. PRUEBA DE ENGLE - GRANGER ( EG )
Se estima la regresión:
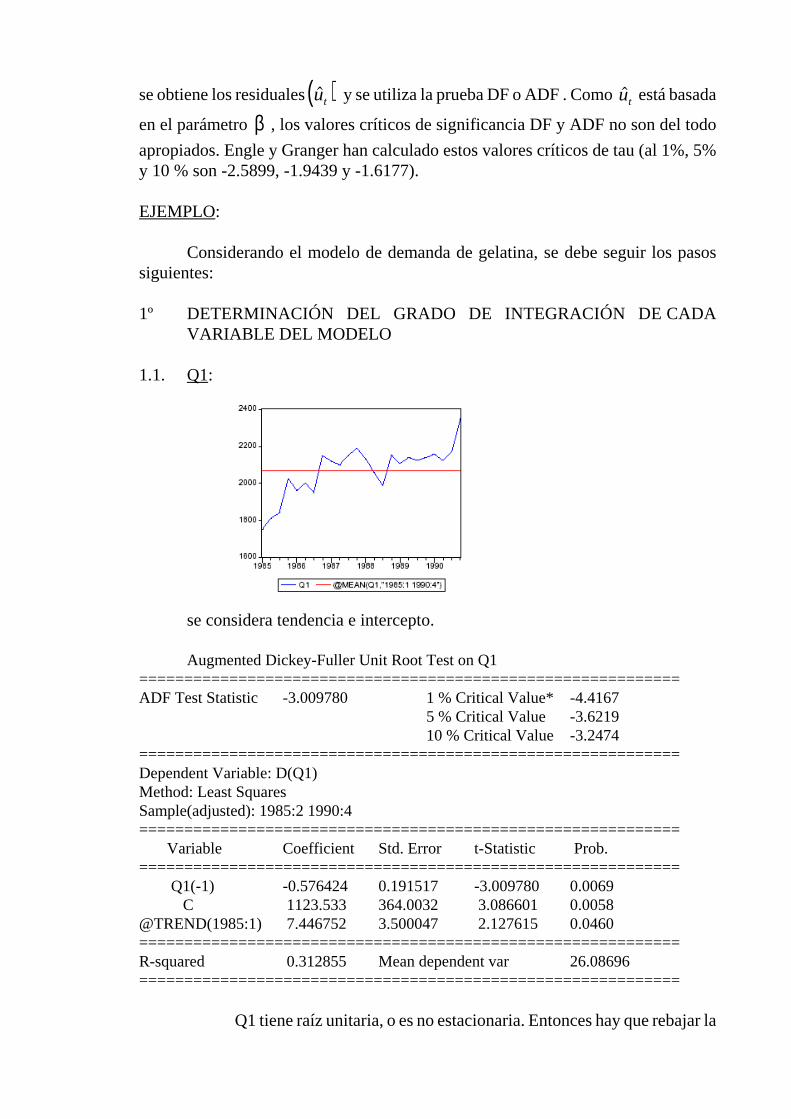
se obtiene los residuales y se utiliza la prueba DF o ADF . Como está basada( )$ut $ut
en el parámetro , los valores críticos de significancia DF y ADF no son del todoβapropiados. Engle y Granger han calculado estos valores críticos de tau (al 1%, 5%y 10 % son -2.5899, -1.9439 y -1.6177).
EJEMPLO:
Considerando el modelo de demanda de gelatina, se debe seguir los pasossiguientes:
1º DETERMINACIÓN DEL GRADO DE INTEGRACIÓN DE CADAVARIABLE DEL MODELO
1.1. Q1:
se considera tendencia e intercepto.
Augmented Dickey-Fuller Unit Root Test on Q1============================================================ADF Test Statistic -3.009780 1 % Critical Value* -4.4167
5 % Critical Value -3.621910 % Critical Value -3.2474
============================================================Dependent Variable: D(Q1)Method: Least SquaresSample(adjusted): 1985:2 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ Q1(-1) -0.576424 0.191517 -3.009780 0.0069 C 1123.533 364.0032 3.086601 0.0058@TREND(1985:1) 7.446752 3.500047 2.127615 0.0460============================================================R-squared 0.312855 Mean dependent var 26.08696============================================================
Q1 tiene raíz unitaria, o es no estacionaria. Entonces hay que rebajar la

serie y realizar el mismo análisis.
Hypothesis Testing for D(Q1)Sample: 1985:1 1990:4Included observations: 23========================================================Test of Hypothesis: Mean = 0.000000========================================================Sample Mean = 26.08696 Sample Std. Dev. = 84.08541Method Value Probabilityt-statistic 1.487876 0.1510========================================================
sin intercepto y sin tendencia.
Augmented Dickey-Fuller Unit Root Test on D(Q1)============================================================ADF Test Statistic -5.244312 1 % Critical Value* -2.6756
5 % Critical Value -1.957410 % Critical Value -1.6238
============================================================Dependent Variable: D(Q1,2)Method: Least SquaresSample(adjusted): 1985:3 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ D(Q1(-1)) -1.223190 0.233241 -5.244312 0.0000============================================================R-squared 0.566333 Mean dependent var 5.227273============================================================
La primera diferencia de Q1 no tiene raíz unitaria, es estacionaria; porlo tanto, Q1 es integrada de orden uno.
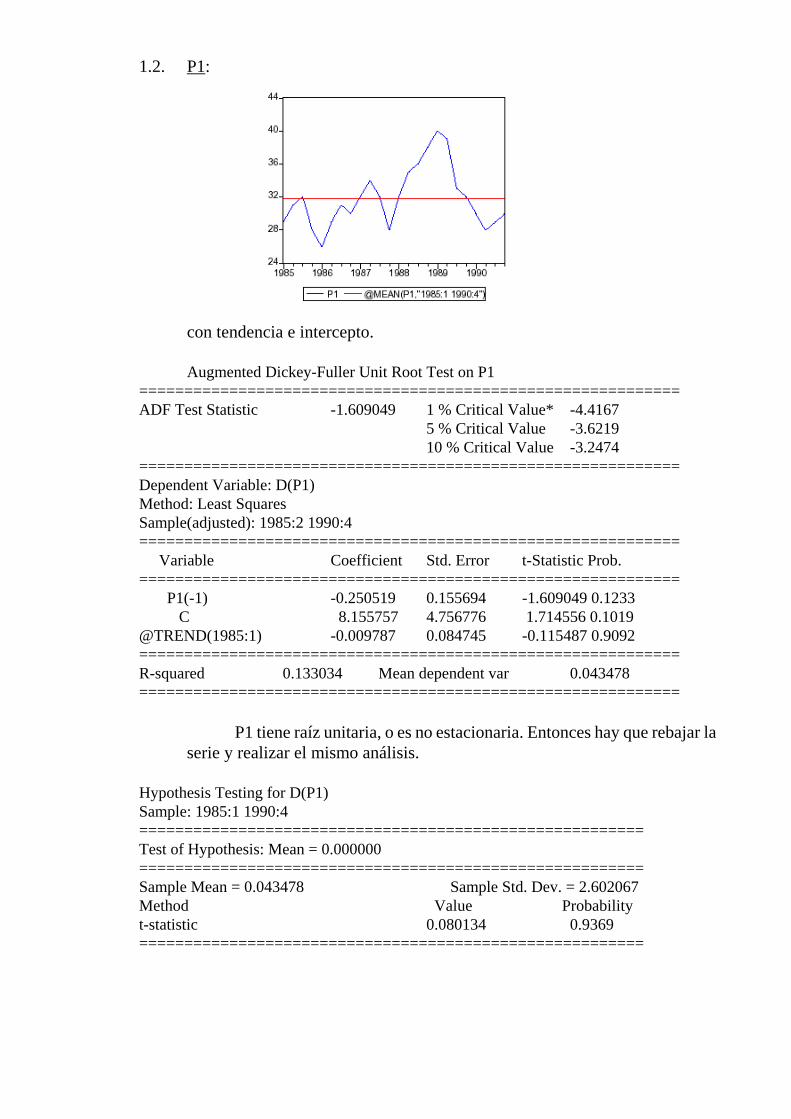
1.2. P1:
con tendencia e intercepto.
Augmented Dickey-Fuller Unit Root Test on P1============================================================ADF Test Statistic -1.609049 1 % Critical Value* -4.4167
5 % Critical Value -3.621910 % Critical Value -3.2474
============================================================Dependent Variable: D(P1)Method: Least SquaresSample(adjusted): 1985:2 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ P1(-1) -0.250519 0.155694 -1.609049 0.1233 C 8.155757 4.756776 1.714556 0.1019@TREND(1985:1) -0.009787 0.084745 -0.115487 0.9092============================================================R-squared 0.133034 Mean dependent var 0.043478============================================================
P1 tiene raíz unitaria, o es no estacionaria. Entonces hay que rebajar laserie y realizar el mismo análisis.
Hypothesis Testing for D(P1)Sample: 1985:1 1990:4========================================================Test of Hypothesis: Mean = 0.000000========================================================Sample Mean = 0.043478 Sample Std. Dev. = 2.602067Method Value Probabilityt-statistic 0.080134 0.9369========================================================

sin tendencia y sin intercepto.
Augmented Dickey-Fuller Unit Root Test on D(P1)============================================================ADF Test Statistic -3.771205 1 % Critical Value* -2.6756
5 % Critical Value -1.957410% Critical Value -1.6238
============================================================Dependent Variable: D(P1,2)Sample(adjusted): 1985:3 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ D(P1(-1)) -0.797297 0.211417 -3.771205 0.0011============================================================R-squared 0.403665 Mean dependent var -0.045455============================================================
La primera diferencia de P1 no tiene raíz unitaria, es estacionaria; porlo tanto, P1 es integrada de orden uno.
1.3. R1:
con tendencia e intercepto.
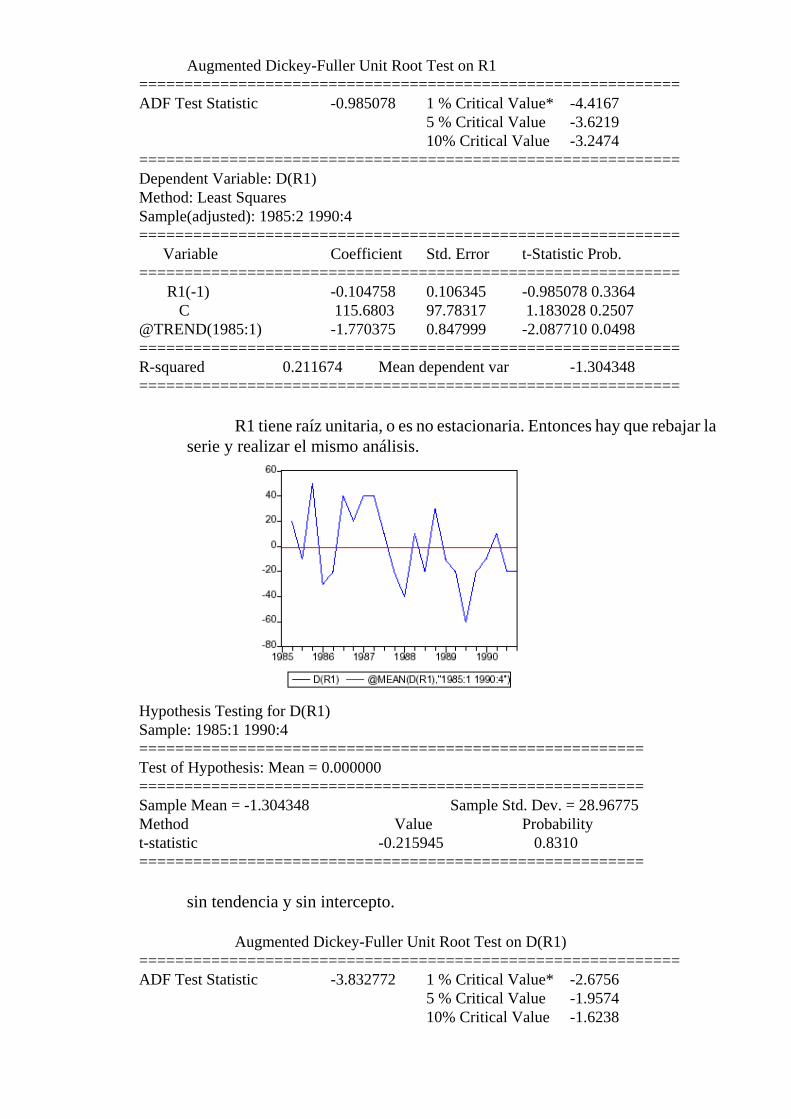
Augmented Dickey-Fuller Unit Root Test on R1============================================================ADF Test Statistic -0.985078 1 % Critical Value* -4.4167
5 % Critical Value -3.621910% Critical Value -3.2474
============================================================Dependent Variable: D(R1)Method: Least SquaresSample(adjusted): 1985:2 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ R1(-1) -0.104758 0.106345 -0.985078 0.3364 C 115.6803 97.78317 1.183028 0.2507@TREND(1985:1) -1.770375 0.847999 -2.087710 0.0498============================================================R-squared 0.211674 Mean dependent var -1.304348============================================================
R1 tiene raíz unitaria, o es no estacionaria. Entonces hay que rebajar laserie y realizar el mismo análisis.
Hypothesis Testing for D(R1)Sample: 1985:1 1990:4========================================================Test of Hypothesis: Mean = 0.000000========================================================Sample Mean = -1.304348 Sample Std. Dev. = 28.96775Method Value Probabilityt-statistic -0.215945 0.8310========================================================
sin tendencia y sin intercepto.
Augmented Dickey-Fuller Unit Root Test on D(R1)============================================================ADF Test Statistic -3.832772 1 % Critical Value* -2.6756
5 % Critical Value -1.957410% Critical Value -1.6238

============================================================Dependent Variable: D(R1,2)Method: Least SquaresSample(adjusted): 1985:3 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ D(R1(-1)) -0.823204 0.214780 -3.832772 0.0010============================================================
La primera diferencia de R1 no tiene raíz unitaria, es estacionaria; porlo tanto, R1 es integrada de orden uno.
1.4. M1:
con tendencia e intercepto.
Augmented Dickey-Fuller Unit Root Test on M1============================================================ADF Test Statistic -3.066463 1 % Critical Value* -4.4167
5 % Critical Value -3.621910% Critical Value -3.2474
============================================================Dependent Variable: D(M1)Method: Least SquaresSample(adjusted): 1985:2 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ M1(-1) -0.688533 0.224536 -3.066463 0.0061 C 159.5472 50.93765 3.132206 0.0052@TREND(1985:1) 2.552756 0.974969 2.618295 0.0165============================================================
M1 tiene raíz unitaria, o es no estacionaria. Entonces hay que rebajarla serie y realizar el mismo análisis.

Hypothesis Testing for D(M1)Sample: 1985:1 1990:4========================================================Test of Hypothesis: Mean = 0.000000========================================================Sample Mean = 6.52173 Sample Std. Dev. = 20.74930Method Value Probabilityt-statistic 1.507384 0.1459========================================================
sin tendencia y sin intercepto.
Augmented Dickey-Fuller Unit Root Test on D(M1)============================================================ADF Test Statistic -4.521066 1 % Critical Value* -2.6756
5 % Critical Value -1.957410% Critical Value -1.6238
============================================================Dependent Variable: D(M1,2)Sample(adjusted): 1985:3 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ D(M1(-1)) -1.119497 0.247618 -4.521066 0.0002============================================================R-squared 0.491413 Mean dependent var 1.818182============================================================
La primera diferencia de M1 no tiene raíz unitaria, es estacionaria; porlo tanto, M1 es integrada de orden uno.
2º DETERMINACIÓN DEL GRADO DE INTEGRACIÓN DE LOSRESIDUOS DEL MODELO
Se estima el modelo y se marcan los residuos (RESID01), acontinuación se verifica la existencia de raíz unitaria de la forma siguiente:
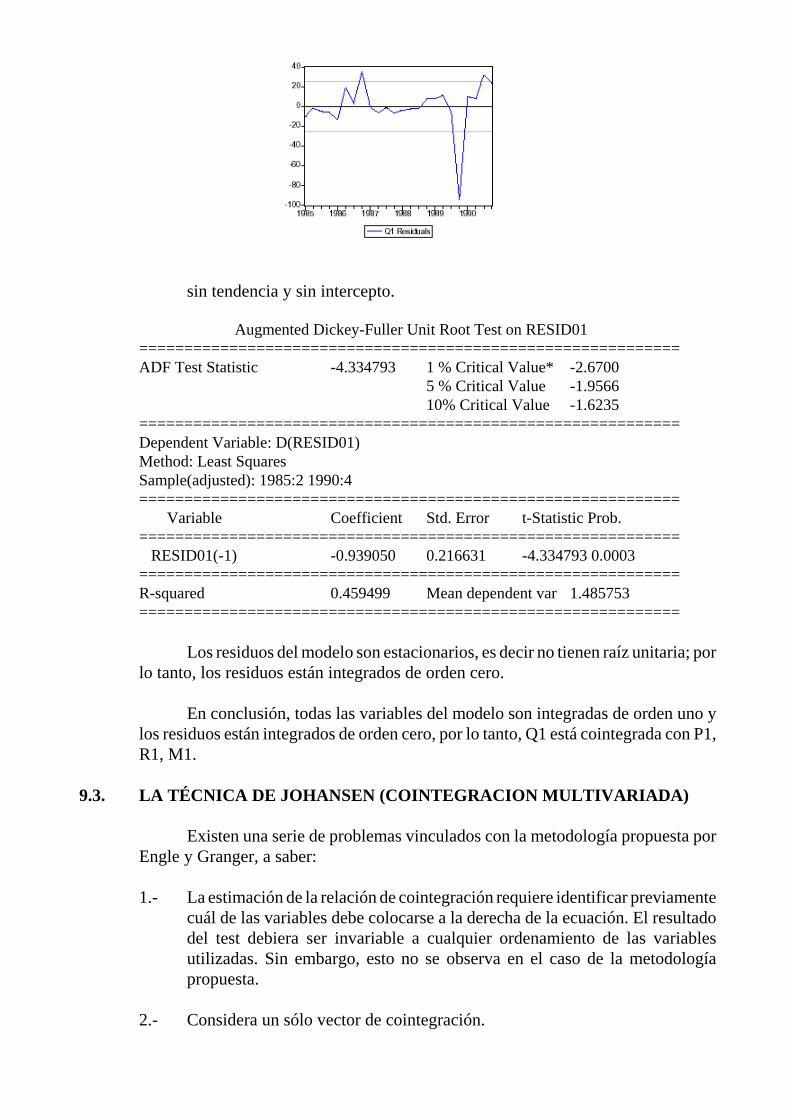
sin tendencia y sin intercepto.
Augmented Dickey-Fuller Unit Root Test on RESID01============================================================ADF Test Statistic -4.334793 1 % Critical Value* -2.6700
5 % Critical Value -1.956610% Critical Value -1.6235
============================================================Dependent Variable: D(RESID01)Method: Least SquaresSample(adjusted): 1985:2 1990:4============================================================ Variable Coefficient Std. Error t-Statistic Prob.============================================================ RESID01(-1) -0.939050 0.216631 -4.334793 0.0003============================================================R-squared 0.459499 Mean dependent var 1.485753============================================================
Los residuos del modelo son estacionarios, es decir no tienen raíz unitaria; porlo tanto, los residuos están integrados de orden cero.
En conclusión, todas las variables del modelo son integradas de orden uno ylos residuos están integrados de orden cero, por lo tanto, Q1 está cointegrada con P1,R1, M1.
9.3. LA TÉCNICA DE JOHANSEN (COINTEGRACION MULTIVARI ADA)
Existen una serie de problemas vinculados con la metodología propuesta porEngle y Granger, a saber:
1.- La estimación de la relación de cointegración requiere identificar previamentecuál de las variables debe colocarse a la derecha de la ecuación. El resultadodel test debiera ser invariable a cualquier ordenamiento de las variablesutilizadas. Sin embargo, esto no se observa en el caso de la metodologíapropuesta.
2.- Considera un sólo vector de cointegración.
X AXt t t= +−1 ε
∆∆∆ Π
X AX X
X A I X
X X
t t t t
t t t
t t t
= − += − += +
− −
−
−
1 1
1
1
εε
ε( )
3.- La existencia de dos etapas sucesivas de estimación (la relación de largo plazoy la de corrección de errores) implica una acumulación de errores a lo largo delas mismas que resta eficiencia a la estimación de la relación de largo plazo.
Por estas razones, surge una especificación alternativa del problema, en la quese incorpora la posibilidad de que exista mñas de un vector de cointegración entre unmismo conjunto de variables.
Si el vector de variables tiene n componentes (n variables noX t
estacionarias), existe la posibilidad de que hayan, por lo menos, n-1 vectores decointegración linealmente independientes. El número de vectores de cointegración seconoce como el rango cointegrante de .X t
La especificación de la metodología de Johansen se basa en una generalizaciónmultivariada del Dickey Fuller. Si es un vector de n variables que siguen unX t
proceso VAR(1):
restando en ambos lados de la ecuación anterior se obtiene:X t −1
Dado que existen n variables que constituyen el vector la dimensión deX t Πes n x n y su rango no puede ser mayor que n. A partir del Teorema de Representaciónde Granger (Engle y Granger, Johansen) se afirma que:
1º Si el rango de la matriz es igual a n (el número total de variables explicadasΠen el modelo VAR), el proceso vectorial es estacionario (todas lasX t
variables en son integradas de orden cero).X t
2º Si el rango de la matriz es igual a , existe no más deΠ r n< r n= − 1vectores de cointegración.
3º Si es una matriz de ceros de tal forma que su rango es igual a 0, entoncesΠtodas las variables son procesos con raíz unitaria y no hay combinacioneslineales de , es decir, las variables no cointegran.X t
El test de cointegración consiste en:
Dado que la determinación del número de vectores de cointegración dependedel rango de y, por lo tanto, del número de raíces características distintas de ceroΠde dicha matriz, se requiere utilizar un test para verificar dicho número.
H0: numero de vectores de cointegracion r≤
( ) ( )λ λr T Ln jjii r
n
= − − ≈= +∑ 1
1
$
Si se tienen las n raíces de la matriz , donde , se puedeΠ ,λ i λ λ λ1 2> > >... n
plantear el siguiente test:
el estadístico es :
donde es la raíz características estimada. Cuanto mayor número de sean iguales$λ i λa cero menor será el .( )λ r
Este contraste es considerado superior al método uniecuacional desarrolladopor Engle y Granger. Las propiedades estadísticas del procedimiento de Johansen songeneralmente mejores y el poder de la prueba de cointegración es más elevado. Hayque indicar que los procedimientos de Engle - Granger y Johansen se basan endiferentes metodologías econométricas y por tanto no pueden ser comparadasdirectamente.
EJEMPLO:
Considerando el modelo de demanda de gelatina, en el Eviews se sigue lasiguiente instrucción:
Quick Group Statistics Cointegration Test Q1 P1 M1 R1 ⇒ ⇒ ⇒ ⇒OK OK.⇒
el computador nos muestra el siguiente resultado:
Johansen Cointegration Test=================================================================Sample: 1985:1 1990:4 Included observations: 22 Test assumption: Linear deterministic trend in the data Series: Q1 P1 M1 R1 Lags interval: 1 to 1 =================================================================
Likelihood 5 Percent 1 Percent Hypothesized Eigenvalue Ratio Critical ValuCritical ValuNo. of CE(s)
================================================================= 0.758424 50.16823 47.21 54.46 None * 0.402068 18.91567 29.68 35.65 At most 1 0.281854 7.601560 15.41 20.04 At most 2 0.014339 0.317750 3.76 6.65 At most 3 ================================================================= *(**) denotes rejection of the hypothesis at 5%(1%) significance level L.R. test indicates 1 cointegrating equation(s) at 5% significance level

∆ ∆Y X u ut t t t= − +−α α1 2 1$
H0: numero de vectores de cointegracion r≤
LR = >5016823 4721. .
tenemos:
por lo tanto, existe una regresión de cointegración.
10º COINTEGRACIÓN Y MECANISMO DE CORRECCIÓN DE ERROR ES(ECM)
Si y están cointegradas entonces hay una relación de equilibrio de largoYt X t
plazo entre las dos y por lo tanto, se puede tratar el término de error como el “errorde equilibrio”. Y se puede utilizar este término de error para atar el comportamientode corto plazo con su valor de largo plazo.
El mecanismo de corrección de errores (ECM) utilizado por primera vez porSargan y más tarde por Engle y Granger, corrige el desequilibrio.
Se considera:
donde , es la combinación lineal de e dos variables que se( )ε σ εt N≈ 0 2, $ut X t Yt
supone son CI(1,1). recoge el efecto impacto o la relación de corto plazo entreα 1
ellas y recoge el efecto feedback o de ajuste a la relación de largo plazo.α 2
Si es significativo estadísticamente entonces éste dice qué proporción delα 2
desequilibrio en Y en un periodo es corregida en el periodo siguiente.
Engle y Granger (1987) proponen el siguiente procedimiento para estimar estetipo de modelos:
1º Verificar que e sean integradas de orden 1.X t Yt
2º Estimar por mínimos cuadrados ordinarios la ecuación de cointegración (orelación de largo plazo).
3º Verificar que los residuos de la ecuación de cointegración sea integrada deorden 1, es decir, que e cointegren.X t Yt
4º Utilizar el error de la ecuación de cointegración rezagado un período, juntocon la primera diferencia de Y e X para estimar la ecuación de corrección deerrores.

11° MODELO VAR 11.1. Introducción
Fueron planteados inicialmente por C. Sims en un artículo publicado en 1980 en ECONOMETRICA, bajo el título de “Macroeconomía y realidad”
Surgen como una crítica a los métodos tradicionales de elaboración de modelos
econométricos al estilo de la Cowles Commision, y sobre todo a la forma en como se realiza la identificación.
Sims, retoma una antigua crítica de Liu (1960) en el sentido de que las restricciones
que se imponen en los modelos son ficticias y no se corresponden con la realidad en la que todas las variables son dependientes.
Adicionalmente Sims se plantea el problema de la dinamicidad de las relaciones y la
escasa información que aporta la teoría económica
Presentación clásica a la identificación
Las relaciones que observamos son el resultado de la interacción de muchas variables por lo que debemos realizar un proceso de identificación o separación de los efectos de cada variable.
En términos de un modelo multiecuacional las relaciones que observamos son las
recogidas en la forma reducida, por lo que es necesario realizar el proceso de identificación (obtención de la forma estructural). La forma estructural es: La forma reducida es: El sistema de ecuaciones es: donde se tiene g x k ecuaciones y (g2 -g )+ (g x k) incógnitas. Existe un exceso de (g2 -g ) incógnitas que hay que eliminar, habitualmente por nulidad a priori. Por lo tanto, se tiene una condición necesaria en cada ecuación siguiente:
1−>GR
Planteamiento:
Se pretende especificar un modelo que recoja de la mejor forma posible la evolución de un sistema económico sin que sea necesario imponer demasiadas restricciones a priori. Se busca un modelo débilmente restringido.
tttt UXYY +Β+Γ=
ttt VXY +Π=
*1)( ΒΓ=Γ−Β=Π −I

Únicamente se necesita especificar las variables que intervienen y el número de retardos adecuado.
Se parte de la especificación general del modelo en la forma reducida:
Se genera un nuevo vector tZ que comprende el conjunto de variables:
Tomando el nuevo vector tZ como una variable aleatoria multivariante podemos utilizar el Teorema de la descomposición de Wold (1938) según el cual toda variable aleatoria puede descomponerse en un componente determinista y un componente aleatorio. Obviando por simplicidad el primero tenemos:
Descomponiendo la matriz de retardos c(L) en dos componentes a(L) y b(L), se tiene:
Separando los valores contemporáneos de a obtenemos la representación autorregresiva pura:
11.2. Especificación
Una vez determinadas las variables y los retardos adecuados, bastará con especificar cada variable en función de sus propios valores retardados y de los valores retardados del resto de variables. Se tiene:
Especificación escalar de la ecuación i-ésima:
Las perturbaciones aleatorias de cada ecuación son ruido blanco, es decir presentan homocedasticidad y ausencia de autocorrelación. Es decir:
Las perturbaciones aleatorias de distintas ecuaciones presentan una matriz de varianzas y covarianzas constante para cada observación t. Tenemos:
ttt VXY +Π=
),( ttt XYZ =
ttt LcDZ ε)(+= tt LcZ ε)(=
tt LbLaZ ε*)(*)(1−= tt LbZLa ε*)()( = tt BZLa ε=)(
)( 3121111
0 trtrtttt BZaZaZaZaaZ ε+++++= −−−−−
ti
m
i
r
jjtiijtiti uYDY ,
1 1,,, ++= ∑∑
= =−β
tirtmtmrtmtmtmtm
rttrtttt
rttrtttttiti
uYYYYYY
YYYDY
,,,2,,21,,1
,2,22,2,221,2,21
,1,12,1,121,1,11,,
++++
+++++
++++=
−−−
−−−
−−−
βββ
βββ
βββ
IuuEuCov 2111 )()( σ=′=
Σ=′= )(),( jiji uuEuuCov

o:
11.3. Estimación
Teniendo en cuenta que las variables explicativas son todas retardadas y como consecuencia de la ausencia de autocorrelación no están correlacionadas con las perturbaciones aleatorias, podemos estimar el modelo de forma consistente por Mínimos Cuadrados Ordinarios (MCO). Se tiene:
La existencia de correlaciones entre las distintas ecuaciones podría inducir la necesidad de utilizar métodos de estimación con información completa. Ahora bien, al no existir restricciones en la matriz de coeficientes (todas las variables aparecen incluidas en todas las ecuaciones) los métodos alternativos no serán más eficientes que los de M.C.O. Charezma (1992).
La determinación del número óptimo de retardos debe realizarse de forma cuantitativa, ya que no existen evidencias teóricas al respecto.
Sims, en su artículo inicial propone la utilización de un Ratio de verosimilitud entre el modelo restringido (el que tienen el menor número de retardos) y el modelo ampliado (el que incluye todos los retardos deseados), de la forma siguiente: con T número de observaciones, c número de variables de modelo ampliado, Σ matrices de productos cruzados de residuos, R número total de restricciones.
Otras medidas alternativas de selección de retardos son:
Akaike Information Criteria:
Schwarz Criteria:
con , m número de ecuaciones y c el número de variables.
En términos prácticos se recomienda utilizar la siguiente receta:
1º Limpiar cada una de las series de cualquier tipo de no estacionariedad. Es decir: aplicar el ploteo, correlograma (AC y PAC), DFA y el Test de Zivot y Andrews (Test de quiebre estructural).
=Σ
mmmm
m
m
22
21
2
22
222
212
12
122
112
σσσ
σσσσσσ
tjtjtjt YYYY −−
−− ′′= 1)(β̂
[ ] 2)( Rar LogLogcT χ≈Σ−Σ−
Nk
NAIC 22 +−=
NNk
NSC )log(2 +−=
Σ−+−
= log2
)2log21(2
NNm π
El Test de Zivot y Andrews determina en que periodo se debe agregar una variable dummy para corregir el quiebre que puede ser en: intercepto, tendencia o ambos.
2º Estimar por MCO cada ecuación, individualmente. 3º Determinar el número de rezagos de las variables explicativas que deben permanecer
en cada ecuación. Para ello se sugieren dos tipos de test: • El test F por bloques, para probar la hipótesis nula de que un número i de rezagos
deben incluirse como explicativas en cada ecuación, versus la alternativa de que dicho número es i+r>i. Este test tiene el problema de que debe ser aplicado individualmente a cada ecuación, pudiendo llegarse a la conclusión de que el número de rezagos a incluirse en ellas es diferente en cada caso. Esto le restaría eficiencia al estimador de MCO.
• El Test de Máxima Verosimilitud (Likelihood Ratio Statistic - LR) para el conjunto de ecuaciones. Nos sirve para determinar el número de rezagos óptimo de un VAR, SIMS (1980). La hipótesis nula de este test es que el sistema tiene un número i de rezagos versus la alternativa de que este número es i+r. El estadístico sería:
donde:
log |Ʃa| = logaritmo natural del determinante de la matriz de varianzas y covarianzas para el modelo con “a” rezagos.
T = número de observaciones. c = número de parámetros estimados en cada ecuación del sistema no
restringido. Es decir: c = m(r+i). q = grados de libertad, número de restricciones en todo el modelo. Es decir:
q = m2 r.
Este test se distribuye Ӽ2 con grados de libertad igual al número de restricciones en el sistema (q=m2r). Este test tiene poco poder para rechazar test sucesivos de restricción de rezagos; por ello el rezago referencial debe ser el de mayor valor en el sistema, es decir, cualquier hipótesis nula debe ser contrastada contra el rezago (i+r). Si se acepta la hipótesis nula (H0), procedemos a verificar con un rezago menor.
11.4. Identificación
En los modelos VAR la etapa de identificación se diferencia de la de estimación y, al contrario de los modelos clásicos, esta identificación se realiza durante el periodo de simulación. (Determinación de los efectos aislados de cada variable sobre el resto).
El proceso de identificación se realiza sobre la Matriz de Varianzas y covarianzas de
las perturbaciones ya que se utilizan dichas perturbaciones para introducir las alteraciones que nos conducen al análisis de la simulación.
Las simulaciones a realizar, denominadas ANALISIS DE IMPULSO RESPUESTA, consistirán en introducir una alteración en la perturbación aleatoria de una ecuación (generalmente igual al valor de su desviación típica, y comprobar el resultado que esta alteración tiene sobre el conjunto del sistema.)
[ ] 2)( Rar LogLogcT χ≈Σ−Σ−

Teniendo en cuenta que existen correlaciones entre las perturbaciones de las distintas ecuaciones no podremos diferenciar claramente los efectos individuales de cada perturbación a menos que se realice una transformación previa.
El proceso de identificación en un Modelo VAR se realiza mediante la ortogonalización de las perturbaciones aleatorias; es decir debemos trasformar el modelo original para que la Matriz de Varianzas y Covarianzas sea diagonal.
Toda matriz simétrica Σ puede ser convertida en una matriz diagonal operando con una nueva matriz triangular Φ de acuerdo con la siguiente expresión:
Premultiplicando las variables originales del modelo por la matriz triangular Φ, obtendremos una nuevo modelo cuya matriz de varianzas y covarianzas de la perturbación es diagonal (independiente de unas ecuaciones a otras).
La solución inicial propuesta por Sims es la conocida como factorización de Cholesky, donde la matriz Φ es una matriz triangular inferior, cuya aplicación a la matriz original perturbaciones aleatorias, genera un efecto de cadena causal entre las distintas variables (perturbaciones), por lo que previamente deberemos haber ordenado las variables del sistema de mayor a menor exogeneidad relativa.
Esta factorización de Cholesky asume que toda la perturbación aleatoria de la primera ecuación corresponde a la primera variable, es decir que no hay efecto adicional procedente de las siguientes variables; la perturbación de la segunda ecuación proviene de la primera y de la suya propia, y así sucesivamente a lo largo de una cadena causal.
El problema surge del hecho de que los resultados de la simulación no son independientes del orden de las variables por lo que ordenaciones distintas nos conducen a alternativas diferentes en la simulación. Funciones Impulso-Respuesta
Constituyen la herramienta básica de simulación con modelos VAR, para el análisis de teorías o políticas económicas. Constituyen una representación de cómo los shocks inducidos en una variable afectan al conjunto del sistema.
Parten de la representación de medias móviles del sistema autorregresivo, que una vez ortogonalizado, nos permite analizar los efectos individuales de cada una de las variables.
Partiendo del modelo autorregresivo general multivariante:
Utilizando el operador retardo:
Φ′ΦΣ=D
ti
m
i
r
jjtiijtiti uYDY ,
1 1,,, Φ+Φ+Φ=Φ ∑∑
= =−β
DuuEuuCov tjtitjti =Φ′ΦΣ=Φ′′Φ=′ΦΦ ),(),( ,,,,
t
r
jjtjt uYY +=∑
=−
1β
Y operando en la expresión anterior obtenemos: donde cada una de las variables se expresa en función de las perturbaciones aleatorias acumuladas.
La segunda herramienta de simulación que nos ofrecen los modelos VAR es la Descomposición de la varianza del error de predicción, y consiste en determinar, para cada horizonte de predicción k, qué porcentaje de las variaciones de cada variable Yi,t+k es explicado por cada perturbación ui,t+k
Nuevamente parten de la representación de medias móviles del modelo autorregresivo multivariante y previamente ortogonalizado
La varianza del error de predicción será:
Pudiendo calcularse qué porcentaje del total de la varianza viene inducido por cada perturbación i
11° MODELO VEC (Modelos de Vectores de Corrección del Error).
Ciertas modelizaciones entre variables no estacionarias, pero que cumplen ciertas condiciones denominadas de cointegración, no sólo no son espurias, sino que aportan gran información sobre las relaciones de equilibrio a largo plazo de las variables económicas.
Un modelo de vector de corrección del error (VEC) es un modelo VAR restringido
(habitualmente con sólo dos variables) que tiene restricciones de cointegración incluidas en su especificación, por lo que se diseña para ser utilizado con series que no son estacionarias pero de las que se sabe que son cointegradas.
El principio detrás de estos modelos es que existe una relación de equilibrio a largo
plazo entre variables económicas y que, sin embargo, en el corto plazo puede haber desequilibrios. Con los modelos de corrección del error, una proporción del desequilibrio de un período (el error, interpretado como un alejamiento de la senda de equilibrio a largo plazo) es corregido gradualmente a través de ajustes parciales en el corto plazo.
Una de las claves de los modelos VEC es determinar si las series que modelizamos
son cointegradas y, si es así, determinar la ecuación de cointegración. Para ello utilizamos el método de Johansen.
ttttt uYLBIuYLBY =−=+= ))(()(
[ ] ∑∑∞
=−
∞
=
− ===−=00
1 )())((s
ststs
ssttt uMuLMuLMuLBIY
∑∞
=+−+ =
0,,,
skstisikti uMY
sis
siktiktii MMYEYP ,0
,,, )(var( ′Σ=−= ∑∞
=++