SEMINARIO 1: ELEMENTOS DIFERENCIALES DE...
20
SEMINARIO 1: ELEMENTOS DIFERENCIALES DE LÍNEA, SUPERFICIE Y VOLUMEN • Sistemas de coordenadas 3D • Transformaciones entre sistemas • Integrales de línea y superficie
-
Upload
truongthuy -
Category
Documents
-
view
213 -
download
0
Transcript of SEMINARIO 1: ELEMENTOS DIFERENCIALES DE...

SEMINARIO 1: ELEMENTOS DIFERENCIALES DE LÍNEA, SUPERFICIE Y VOLUMEN
• Sistemas de coordenadas 3D• Transformaciones entre sistemas• Integrales de línea y superficie

SISTEMA COORDENADO CARTESIANO O RECTANGULARLos elementos de referencia son tres planos perpendiculares entre sí (XY, XZ,YZ), denominados planos coordenados, cuya intersección determina el origen. Loque comúnmente se denominan ejes coordenados son la intersección de cadapar de elementos de referencia.
La posición del punto P se determina a través de la intersección de tres planosque pasan por él y son paralelos a los de referencia. La característicageométrica de cada uno (coordenada) es la distancia respecto al plano dereferencia correspondiente.

SISTEMA COORDENADO CARTESIANO O RECTANGULARTal cual se observa en la imagen, los vectores unitarios mutuamenteperpendiculares ax, ay y az, se definen como ortogonales a las superficies x=x1,y=y1, z=z1. Son los denominados vectores base. app1
Se puede observar que cumplen las siguientes relaciones vectoriales:
ax · ay = ay · az = ax · az = 0 PRODUCTO ESCALARax · ax = ay · ay = az · az = 1ax x ay= az PRODUCTO VECTORIALay x az = axaz x ax = ay
El vector posición del punto P se expresa como:
r = x1 ax + y1 ay + z1az ⇒ r = |r| = (x12 + y1
2+ z12)1/2
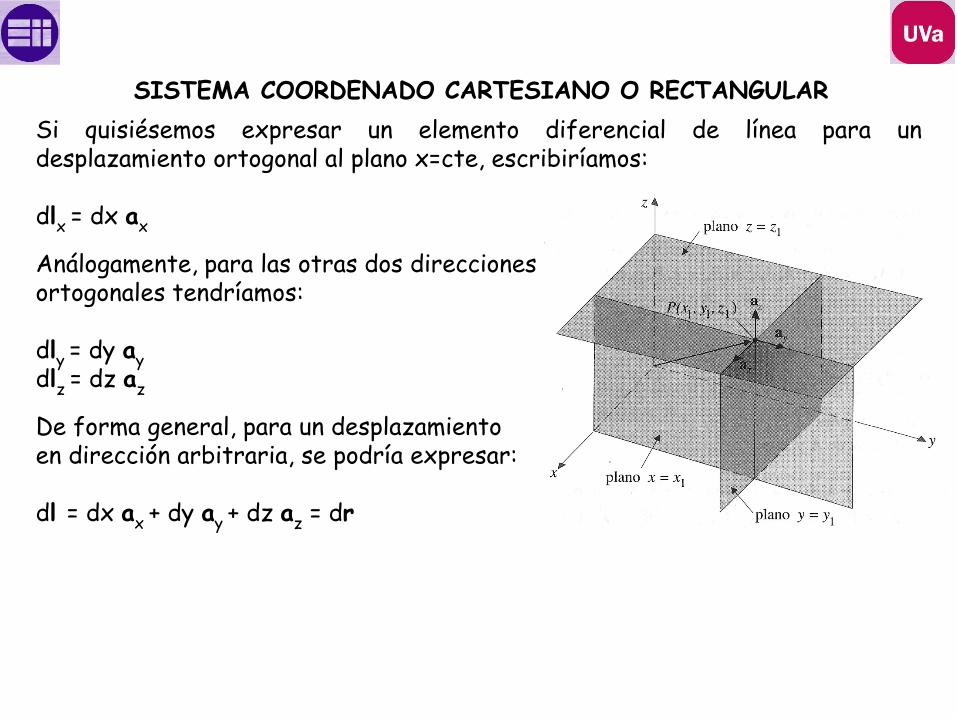
SISTEMA COORDENADO CARTESIANO O RECTANGULARSi quisiésemos expresar un elemento diferencial de línea para undesplazamiento ortogonal al plano x=cte, escribiríamos:
dlx = dx ax
Análogamente, para las otras dos direccionesortogonales tendríamos:
dly = dy aydlz = dz az
De forma general, para un desplazamientoen dirección arbitraria, se podría expresar:
dl = dx ax + dy ay + dz az = dr

SISTEMA COORDENADO CARTESIANO O RECTANGULARLos diferenciales de superficie, entendidos como vectores, se definen conmódulo igual a su área y dirección ortogonal a la superficie de coordenadaconstante. Así*:
dSx = dy dz axdSy = dx dz aydSz = dx dy az
El elemento de volumen corresponderíaal paralelepípedo delimitado por esas áreas:
dV = dx dy dz
* Sentido => en una superficie cerrada, saliente respecto a ésta.

SISTEMA DE COORDENADAS CILÍNDRICASLas coordenadas del punto P son el radio del cilindro (r o ρ), el ángulo que formael semiplano con el eje X (φ o ϕ) y la altura del plano respecto al de referencia(z, coincidente con la cartesiana).
Nótese que de esas tres coordenadas una es el ángulo φ ∈ [0, 2π], mientras quelas otras dos son longitudinales (r o ρ, z). La aparición de una coordenadaangular va a complicar las expresiones analíticas de los elementos de línea,superficie y volumen.
SISTEMA DE COORDENADAS CILÍNDRICAS
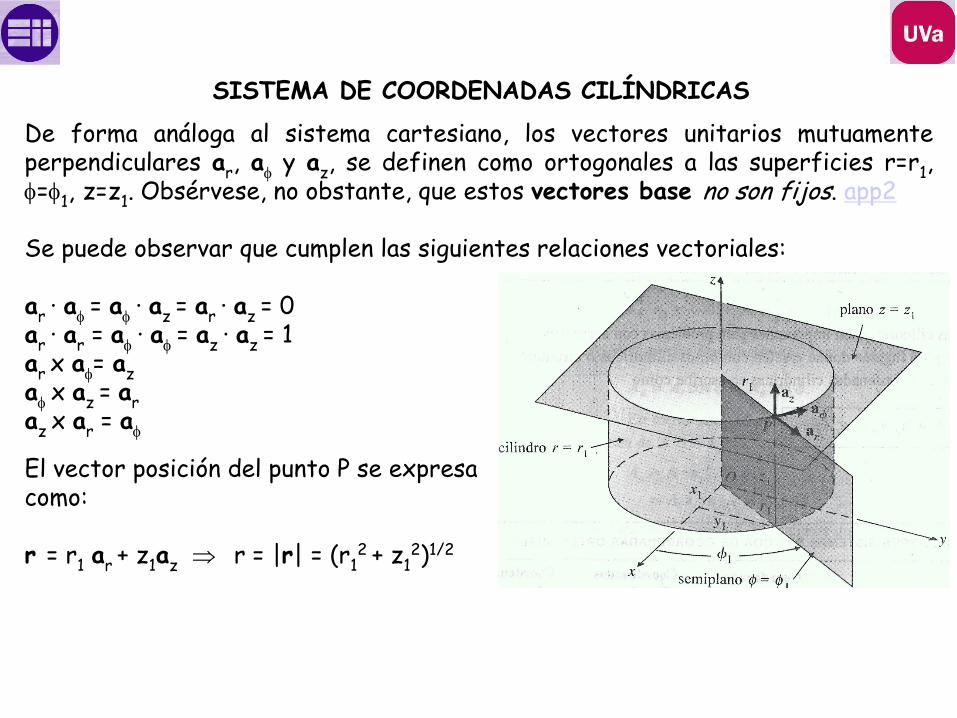
De forma análoga al sistema cartesiano, los vectores unitarios mutuamenteperpendiculares ar, aφ y az, se definen como ortogonales a las superficies r=r1,φ=φ1, z=z1. Obsérvese, no obstante, que estos vectores base no son fijos. app2
Se puede observar que cumplen las siguientes relaciones vectoriales:
ar · aφ = aφ · az = ar · az = 0ar · ar = aφ · aφ = az · az = 1ar x aφ= azaφ x az = araz x ar = aφ
El vector posición del punto P se expresacomo:
r = r1 ar + z1az ⇒ r = |r| = (r12 + z1
2)1/2
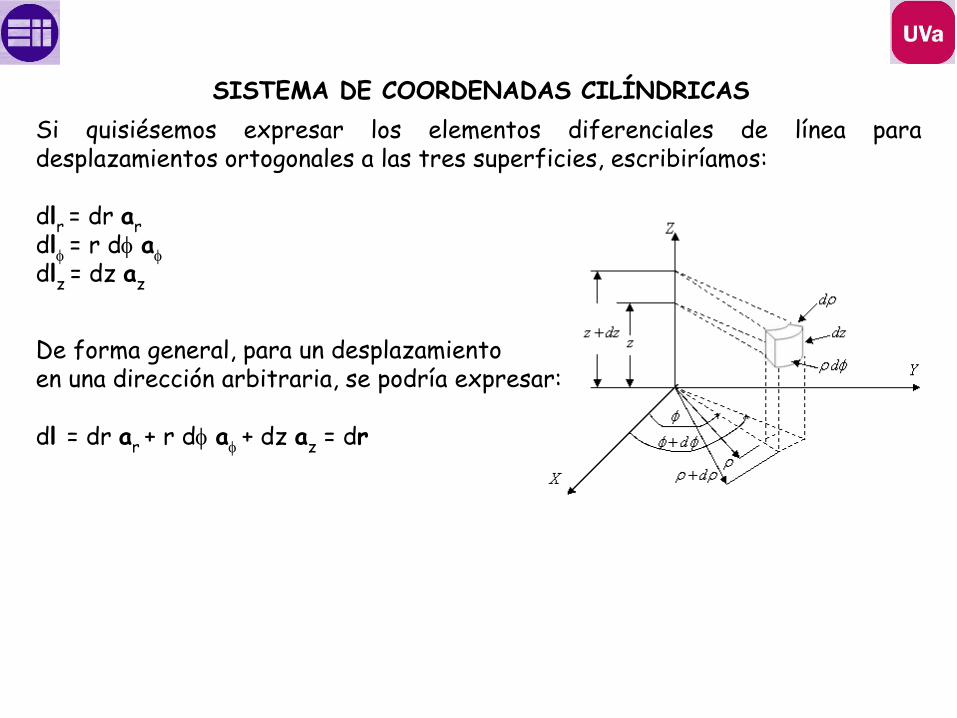
SISTEMA DE COORDENADAS CILÍNDRICASSi quisiésemos expresar los elementos diferenciales de línea paradesplazamientos ortogonales a las tres superficies, escribiríamos:
dlr = dr ardlφ = r dφ aφdlz = dz az
De forma general, para un desplazamientoen una dirección arbitraria, se podría expresar:
dl = dr ar + r dφ aφ + dz az = dr

SISTEMA DE COORDENADAS CILÍNDRICAS
Los diferenciales de superficie se definen de nuevo con módulo igual a su área ydirección ortogonal a la superficie de coordenada constante. Así*:
dSr = r dφ dz ardSφ = dr dz aφdSz = r dr dφ az
El elemento de volumen corresponderíaal paralelepípedo delimitado por esas áreas:
dV = r dr dφ dz
* Sentido => en una superficie cerrada, saliente respecto a ésta.

SISTEMA DE COORDENADAS ESFÉRICAS
Los elementos de referencia son los mismos que para esféricas: el origen, un planoque pasa por él (plano XY cartesiano), una recta orientada sobre dicho plano (ejeX cartesiano) y otra ortogonal al mismo (eje Z cartesiano), que también pasan porel origen.
La posición del punto P se localiza a través de laintersección de tres superficies que pasan porél: una esfera centrada en el origen; un conocuyo eje coincide con el Z y cuyo vértice es elorigen; y un semiplano ortogonal al de referencia,limitado por el eje Z.
SISTEMA DE COORDENADAS ESFÉRICAS
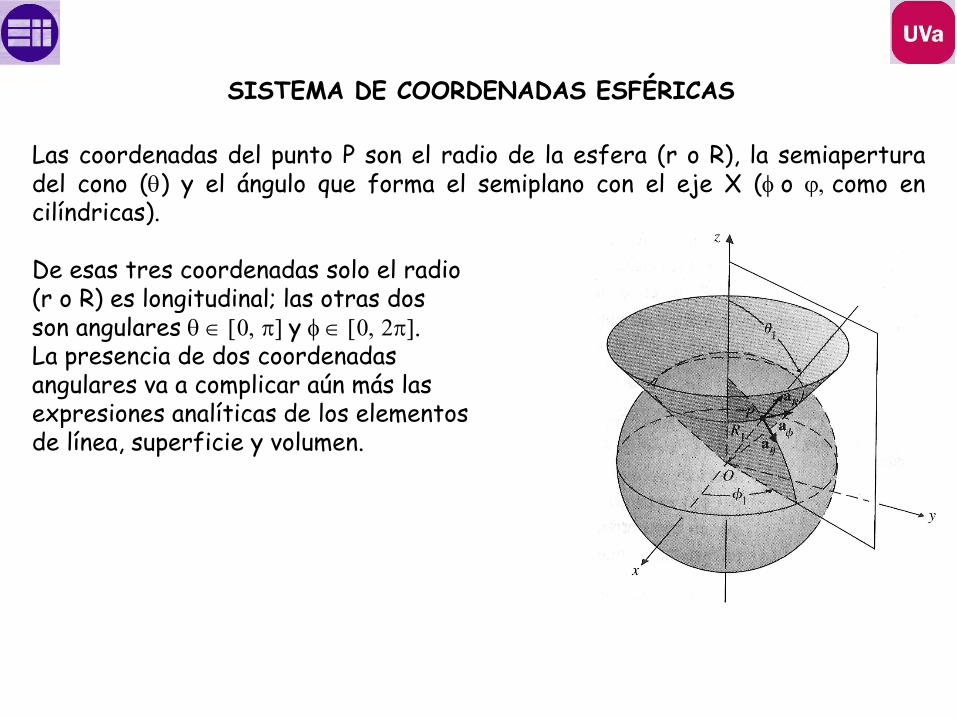
Las coordenadas del punto P son el radio de la esfera (r o R), la semiaperturadel cono (θ) y el ángulo que forma el semiplano con el eje X (φ o ϕ, como encilíndricas).
De esas tres coordenadas solo el radio(r o R) es longitudinal; las otras dosson angulares θ ∈ [0, π] y φ ∈ [0, 2π].La presencia de dos coordenadasangulares va a complicar aún más lasexpresiones analíticas de los elementosde línea, superficie y volumen.

SISTEMA DE COORDENADAS ESFÉRICAS
TERRESTRES CELESTES

SISTEMA DE COORDENADAS ESFÉRICAS
Nuevamente, los vectores unitarios mutuamente perpendiculares aR, aθ y aφ, sedefinen como ortogonales a las superficies R=R1, φ=φ1, θ=θ1. Al igual que sucede encilíndricas, estos vectores base no son fijos. app3
Se puede observar que cumplen las siguientesrelaciones vectoriales:
aR · aθ = aθ · aφ = aR · aφ = 0aR · aR = aθ · aθ = aφ · aφ = 1aR x aθ= aφaθ x aφ= aRaφ x aR = aθ
El vector posición del punto P se expresa como:
r = R1 aR ⇒ r = |r| = R1

SISTEMA DE COORDENADAS ESFÉRICASSi quisiésemos expresar los elementos diferenciales de línea paradesplazamientos ortogonales a las tres superficies, escribiríamos:
dlR = dR aRdlθ = R dθ aθdlφ = R senθ dφ aφ
De forma general, para un desplazamientoen una dirección arbitraria, se podría expresar:
dl = dR aR + R dθ aθ + R senθ dφ aφ = dr
SISTEMA DE COORDENADAS ESFÉRICAS
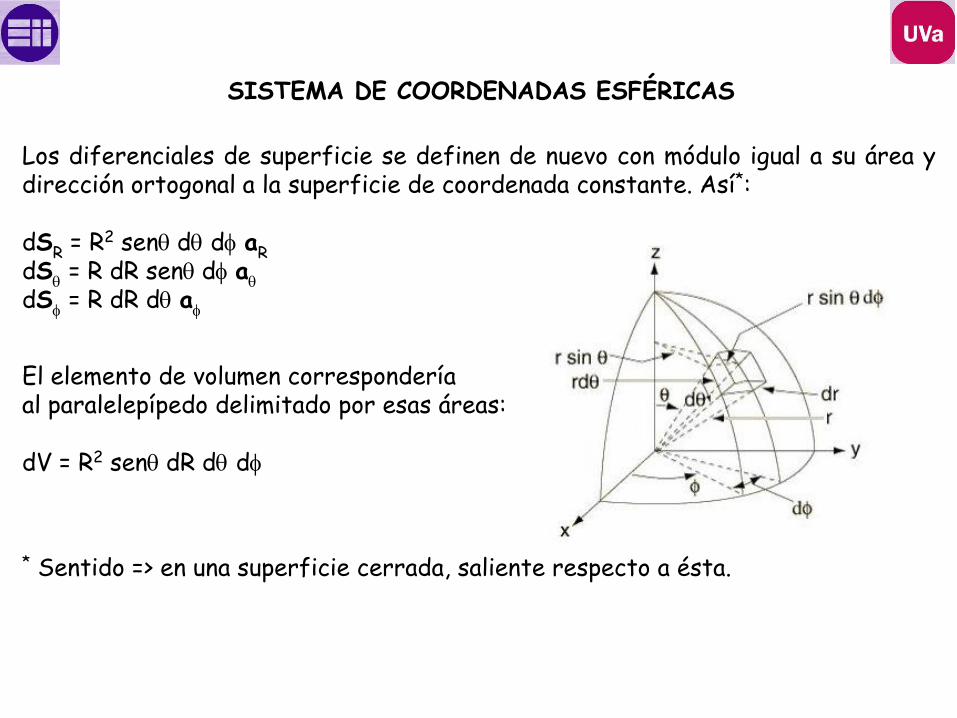
Los diferenciales de superficie se definen de nuevo con módulo igual a su área ydirección ortogonal a la superficie de coordenada constante. Así*:
dSR = R2 senθ dθ dφ aRdSθ = R dR senθ dφ aθdSφ = R dR dθ aφ
El elemento de volumen corresponderíaal paralelepípedo delimitado por esas áreas:
dV = R2 senθ dR dθ dφ
* Sentido => en una superficie cerrada, saliente respecto a ésta.

INTEGRAL DE LÍNEA DE UNA FUNCIÓN VECTORIAL
Recordemos la expresión del trabajo realizado por una fuerza constante en uncierto desplazamiento rectilíneo:
W = F · d · cosθ = F · d
donde F es la fuerza aplicada, d el desplazamientoy θ el ángulo formado por los dos vectores.
Si la fuerza aplicada fuese variable y/o la trayectoria no fuese rectilínea (oambas cosas a un tiempo), podríamos evaluar trabajos incrementales asociados apequeños tramos en los que se podría considerar la fuerza como aproximadamenteconstante y/o la dirección y el sentido del desplazamiento como básicamenteinvariables:
∆W = F (r) · ∆l (r)
Aquí r denota la posición en cada tramo de la trayectoria en que esta se divide.

INTEGRAL DE LÍNEA DE UNA FUNCIÓN VECTORIAL
Si la integral comienza y termina en el mismo punto, esto es, si se integra a lolargo de una trayectoria cerrada, la magnitud evaluada recibe el nombre decirculación. Matemáticamente se denota como:
La circulación dependerá en general tanto de la función vectorial como de latrayectoria seguida. Volveremos sobre esta expresión más adelante.
∮⃗F ·d l⃗ = ∫a
a
F⃗ · d l⃗ = C F
INTEGRAL DE SUPERFICIE DE UNA FUNCIÓN VECTORIAL
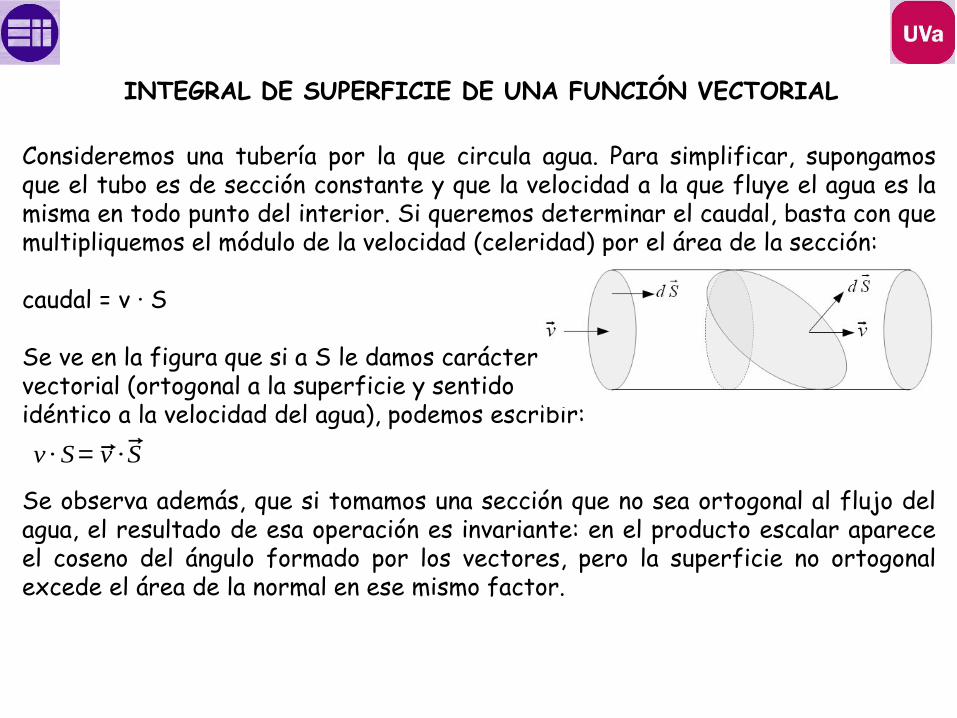
Consideremos una tubería por la que circula agua. Para simplificar, supongamosque el tubo es de sección constante y que la velocidad a la que fluye el agua es lamisma en todo punto del interior. Si queremos determinar el caudal, basta con quemultipliquemos el módulo de la velocidad (celeridad) por el área de la sección:
caudal = v · S
Se ve en la figura que si a S le damos caráctervectorial (ortogonal a la superficie y sentidoidéntico a la velocidad del agua), podemos escribir:
Se observa además, que si tomamos una sección que no sea ortogonal al flujo delagua, el resultado de esa operación es invariante: en el producto escalar apareceel coseno del ángulo formado por los vectores, pero la superficie no ortogonalexcede el área de la normal en ese mismo factor.
v · S= v⃗ · S⃗

INTEGRAL DE SUPERFICIE DE UNA FUNCIÓN VECTORIAL
La descripción que hemos realizado, evidentemente, es una idealización. Laviscosidad del agua y el rozamiento del fluido con las paredes de la tuberíaconducen a una distribución de velocidades análoga a la ilustrada.
Para evaluar el caudal en este flujo no uniformepodemos dividir el tubo en elementos de secciónpequeña, para los cuales v será aproximadamenteconstante (tanto más cuanto menor sea dicha sección).
Esta es la definición matemática de la integral de superficie de la velocidad, oflujo del vector velocidad: la integral doble, evaluada a través de una superficie,del producto escalar de la función vectorial por el elemento diferencial de área encada punto de dicha superficie.
caudal= limΔ S i→0
∑i
v⃗ i ·Δ S⃗ i=∬S
v⃗ · d S⃗i= Φv

INTEGRAL DE SUPERFICIE DE UNA FUNCIÓN VECTORIAL
Si el flujo se evalúa a través de una superficie cerrada, su magnitud informasobre la posible presencia de fuentes o sumideros.
Si no los hubiese, la cantidad neta de agua que fluiría hacia el volumen englobadosería igual a la que lo abandonaría, y el flujo neto sería 0.
Si el volumen englobase una fuente de agua, del volumen saldría más agua de laque fluiría a su interior, y tomaremos el flujo neto como positivo. Obsérvese queesto requiere que en la expresión matemática los diferenciales de superficietengan un sentido saliente respecto al volumen encerrado.
Si dentro del volumen hay un sumidero de agua, el flujo neto será negativo.
Φv= ∬S cerrada
v⃗ · d S⃗= ∮S cerrada
v⃗ · d S⃗





![7HPD (OHFWURPDJQHWLVPR -XDQ -LPpQH] 'WR …mudarra.cpd.uva.es/goya/Intranet/pages/programas/fisica2/2015-201…7hpd (ohfwurpdjqhwlvpr )xhu]d pdjqpwlfd vreuh fdujdv \ fruulhqwhv $solfdflrqhv](https://static.fdocuments.ec/doc/165x107/5a95f4667f8b9a30358ccd2c/7hpd-ohfwurpdjqhwlvpr-xdq-lppqh-wr-7hpd-ohfwurpdjqhwlvpr-xhud-pdjqpwlfd.jpg)




![Tema 4-ondas electromagneticas [Modo de compatibilidad]mudarra.cpd.uva.es/goya/Intranet/pages/programas/fisica2/2015-2016/... · 7hpd 2qgdv hohfwurpdjqpwlfdv (fxdflrqhv gh 0d[zhoo](https://static.fdocuments.ec/doc/165x107/5a95ee287f8b9a18628cda96/tema-4-ondas-electromagneticas-modo-de-compatibilidad-2qgdv-hohfwurpdjqpwlfdv.jpg)