Reporte 2
76
Universidad de Costa Rica Facultad de Ingeniería Escuela de Ingeniería Eléctrica Laboratorio Eléctrico II IE-0408 Reporte Segundo experimento OSCILADORES MULTIVIBRADORES Y FILTROS Grupo de Trabajo: 3 Profesor: Jaime Cascante Grupo: 2 Daniel Hernández Méndez, B03027 Jesús Arturo Quirós Fallas, B05014 Fecha de entrega: 6 de mayo del 2014
-
Upload
arturo-quiros -
Category
Documents
-
view
45 -
download
0
Transcript of Reporte 2

Universidad de Costa Rica
Facultad de Ingeniería
Escuela de Ingeniería Eléctrica
Laboratorio Eléctrico II IE-0408
Reporte
Segundo experimento
OSCILADORES MULTIVIBRADORES Y FILTROS
Grupo de Trabajo: 3
Profesor: Jaime Cascante
Grupo: 2
Daniel Hernández Méndez, B03027
Jesús Arturo Quirós Fallas, B05014
Fecha de entrega: 6 de mayo del 2014

Índice
1. OBJETIVOS 1
1.1. Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2. Objetivos específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2. NOTA TEÓRICA 2
2.1. Consideraciones para el diseño . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1.1. Osciladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2.1.2. Multivibradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.3. Filtros Activos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2. Cuestionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3. LISTA DE EQUIPOS 7
4. LISTA DE COMPONENTES 8
5. DISEÑO CORREGIDO 10
5.1. I Parte: Osciladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.1.1. Condición de oscilación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.1.2. Frecuencia de oscilación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.3. Simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5.1.4. Oscilador de frecuencia variable . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2. II Parte : Multivibradores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2.1. Utilizando dos LM555 y todos los componentes periféricos que requiera, di-
señe el dispositivo multivibrador que genere la salida mostrada en la Figura
7: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.2.2. Construya un generador de señales cuadradas de frecuencia variable entre
100 Hz a 10 kHz con un CD4047 y todos los componentes periféricos que
requiera. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.2.3. Verifique el funcionamiento del circuito diseñado el punto 3. con varias simu-
laciones (al menos 3) comparando los valores de frecuencia simulados con
los teóricos definidos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.3. III Parte :Filtros Activos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.3.1. Filtro Pasa Bajos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
5.3.2. Filtro Pasa altos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
II

5.3.3. Filtro Pasa Bandas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.3.4. Sumador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6. RESULTADOS EXPERIMENTALES Y ANÁLISIS DE LOS RESULTADOS 34
6.1. Oscilador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.2. Multivibradores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.2.1. LM555 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.2.2. CD4047 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.3. Filtros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.3.1. Filtro Pasa Bajos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.3.2. Filtro Pasa Altos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.3.3. Filtro Pasa bandas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.3.4. Sumador no inversor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
6.3.5. FFT y dominio en el tiempo de los filtros . . . . . . . . . . . . . . . . . . . . . . 43
7. CONCLUSIONES Y RECOMENDACIONES 52
7.1. Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
7.2. Recomendaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
8. BIBLIOGRAFÍA 53
9. ANEXOS 54
9.1. Anexo A. Tablas para la función de transferencia para filtros . . . . . . . . . . . . . . . 54
9.2. Anexo B. Hoja del frabricante LM555 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
9.3. Anexo C. Hoja del frabricante CD4047 . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
9.4. Anexo D. Prereporte suministrado por el profesor Cascante . . . . . . . . . . . . . . . 63
III

Índice de Figuras
1. Diagrama de bloques para un sistema realimentado sencillo [2] . . . . . . . . . . . . 2
2. Diagrama de bloques del LM555 [?] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3. Diagrama de bloques del CD4047 [Anexo C] . . . . . . . . . . . . . . . . . . . . . . . . 4
4. Circuito oscilador a diseñar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5. Circuito oscilador a calcular su FTLA . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
6. Respuesta en el tiempo para el oscilador, simulado en TINA. . . . . . . . . . . . . . . 13
7. Dispositivo multivibrador. [Anexo D] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
8. Diagrama de bloques del diseño del multivibrador. . . . . . . . . . . . . . . . . . . . . 14
9. Primer Etapa circuito multivibrador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
10. Simulación primer etapa. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
11. Segunda Etapa circuito multivibrador. . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
12. Simulación segunda etapa: 1000 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
13. Simulación segunda etapa: 500 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
14. Circuito completo multivibrador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
15. Simulación circuito completo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
16. Circuito generador de señales cuadradas . . . . . . . . . . . . . . . . . . . . . . . . . . 22
17. Diagrama de bloques del ecualizador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
18. Topología Sallen Key no inversor para pasa bajos . . . . . . . . . . . . . . . . . . . . . 23
19. Bode del filtro pasa bajos para las bajas frecuencias del ecualizador, simulado en TINA. 25
20. Bode del filtro pasa bajos para las bajas frecuencias del ecualizador, simulado en
MATLAB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
21. Topología filtro pasa altos Sallen Key no inversor. . . . . . . . . . . . . . . . . . . . . . 27
22. Bode del filtro pasa altos para las altas frecuencias del ecualizador, simulado en TINA. 28
23. Bode del filtro pasa altos para las altas frecuencias del ecualizador, simulado en MATLAB. 28
24. Filtro pasa bandas, a partir de las dos topologías en cascada. . . . . . . . . . . . . . . 29
25. Barrido de frecuencias para el filtro pasa bandas, en TINA. . . . . . . . . . . . . . . . 30
26. Bode para el filtro pasa bandas, en MATLAB. . . . . . . . . . . . . . . . . . . . . . . . 31
27. Esquemático para el sumador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
28. Esquemático del ecualizador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
29. Diagrama de bode del ecualizador, en MATLAB. . . . . . . . . . . . . . . . . . . . . . . 33
30. Salida circuito oscilador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
31. LM555 a 1 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
32. Salida del Lm555 a 500 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
IV
33. Salida del LM555 a 1000 Hz. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
34. Salida multivibrador LM555. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
35. Frecuencia de salida mínima CD4047. . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
36. Frecuencia de salida máxima CD4047. . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
37. Barrido de frecuencias filtro pasa bajos . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
38. Barrido de frecuencias filtro pasa altos . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
39. Barrido de frecuencias filtro pasa bandas . . . . . . . . . . . . . . . . . . . . . . . . . 42
40. Barrido de frecuencias para el ecualizador. . . . . . . . . . . . . . . . . . . . . . . . . . 43
41. FFT Filtro Pasa Bajos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
42. Respuesta en el dominio del tiempo Filtro Pasa Bajos. . . . . . . . . . . . . . . . . . . 45
43. FFT Filtro Pasa Altos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
44. Respuesta en el dominio del tiempo Filtro Pasa Altos. . . . . . . . . . . . . . . . . . . 47
45. FFT Filtro Pasa Bandas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
46. Respuesta en el dominio del tiempo Filtro Pasa Bandas. . . . . . . . . . . . . . . . . . 49
47. FFT sumador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
48. Respuesta en el dominio del tiempo sumador. . . . . . . . . . . . . . . . . . . . . . . . 51
V

Índice de Tablas
1. Comparación LM555 y CD4047 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2. Lista de Equipos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3. Lista de Componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4. Lista de Componentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5. Lista de Equipos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
VI

IE0408 - Laboratorio Eléctrico II Reporte 2
Resumen
En el presente reporte se muestran los resultados de pruebas de distintos generadores de
onda, dos juegos de multivibradores y un generador de onda sinusoidal a partir del uso amplifi-
cadores operacionales. A parte se realizó un diseño de un ecualizador con tres filtros, pasa altos,
pasa bandas y pasa bajos. Se comprobó el funcionamiento de cada etapa, donde los mejores
resultados de los multivibradores se obtuvieron con los circuitos de LM555. Para los filtros del
ecualizador se realizaron pruebas en frecuencia. Finalmente se probó el comportamiento de las
ondas producidas por los multivibradores y generadores de ondas al pasar dichas señales gene-
radas por el sistema de filtros del ecualizador.
Palabras Clave : CD4047, LM555, Oscilador Sinusoidal, Multivibrador, Ecualizador, Filtros ac-
tivos
Escuela de Ingeniería Eléctrica 1 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
1. OBJETIVOS
1.1. Objetivo general
z Estudiar el funcionamiento básico de un circuito oscilador y multivibrador.
z Diseñar dispositivos de generación de frecuencias para aplicaciones prácticas.
z Diseñar un filtro analógico utilizando las técnicas aprendidas en el curso de Electrónica II.
z Verificar experimentalmente la respuesta en frecuencia del sistema diseñado.
1.2. Objetivos específicos
z Analizar el comportamiento de las ondas ante distintos tipos y combinaciones de filtros.
z Comparar y revisar los resultados obtenidos de las características eléctricas obtenidas expe-
rimentalmente contra los datos simulados.
Escuela de Ingeniería Eléctrica 1 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
2. NOTA TEÓRICA
2.1. Consideraciones para el diseño
2.1.1. Osciladores
En el caso del presente experimento se utilizan los osciladores sinusoidales, los cuales están
basados en una condición de estabilidad crítica. Una de las principales características de estos
sistemas es que no poseen una entrada. Para generar que un sistema oscile indefinidamente, se
utilizan los criterios de estabilidad y respuesta en frecuencia.
En la ecuación (1) se presenta la fórmula de la función de transferencia de lazo cerrado, en
función de sus dos bloques. Esto a partir del diagrama de bloques presentado en la figura 1.
Figura 1: Diagrama de bloques para un sistema realimentado sencillo [2]
FTLC =K1
1∓K1K2
=K1
1∓ FTLA(1)
De la ecuación 1 se puede definir la ecuación característica, la cual se presenta en la ecuación
(2). Donde N(s) es el polinomio característico, y las soluciones de N(s) son los polos o raíces de la
FTLC.
1−K1K2 =N(s)
D(s)= 0 (2)
Entonces para que el sistema sea oscilatorio se ocupa que los polos de N(s) sean complejos,
conjugados y con parte real igual a cero. De manera que una vez que se obtiene N(s) se puede
determinar la condición de oscilación y la frecuencia de oscilación para el sistema. En el caso de
Escuela de Ingeniería Eléctrica 2 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
los sistemas con N(s) de segundo orden se tiene para N(s) la froma de la ecuación (3) .
a2S2 + a1S + a0 = 0 (3)
Siendo las soluciones de la ecuación (3) los polos del sistema, se cambia s por jw en la misma
ecuación y se busca la forma en hacer que dichos polos sean complejos conjugados con parte
real igual a cero. Así las condición de oscilación se presenta en la ecuación (4) y la frecuencia de
oscilación al despejar para w se presenta en la ecuación (5).
a1 = 0 (4)
ω =
√a0a2
(5)
Donde la frecuencia de oscilación y la condición de oscilación dependerán de los componentes
con los cuales se armó el circuito, es decir, dependiendo de la variación de las magnitudes en ellos,
así variará la frecuencia de oscilación.
2.1.2. Multivibradores
Los multivibradores son circuitos regenerativos diseñados especialmente para aplicaciones de
temporización, basados en la conmutación de elementos no lineales y en la carga y descarga de
elementos almacenadores de energía. Se clasifican en: biestables, astables y monoestables.
Un multivibrador biestable presenta dos estados estables como su nombre lo indica. Requiere
de una excitación externa para el cambio de estado. Un multivibrador monoestable presenta un
estado estable y al igual que el biestable requiere de excitación externa para cambiar el estado,
comúnmente llamado disparador.
El multivibrador astable, no presenta estados estables y cambia de un estado a otro sin la nece-
sidad de excitación externa.
Temporizadores monolíticos:
La necesidad de las funciones monoestables y astables aparece con tanta frecuencia que hay
circuitos especiales llamados temporizadores IC, los cuales están disponibles para satisfacer estos
requerimientos. Entre la variedad de productos disponibles, el que ha obtenido una aceptación
más amplia en términos de costo y versatilidad es el temporizador 555. El 555 está disponible en
sus versiones bipolar y CMOS. En la Figura 2 se muestra como esta compuesto el LM555, que cons-
ta básicamente de 2 comparadores, un biestable RS (flip-flop) y un elemento conmutador (transis-
tor).
Escuela de Ingeniería Eléctrica 3 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 2: Diagrama de bloques del LM555 [?]
Otro circuito integrado de uso frecuente es el CD4047. Es un multivibrador capaz de operar en
forma astable y monoestable. Requiere de un capacitor y un resistor externo para determinar el
pulso de salida tanto en configuración monoestable como astable. La frecuencia de salida (de un
ciclo de trabajo del 50 %) en las terminales de salida Q y Q está determinada por el valor de los
componentes R y C. En la Figura 3 se muestra el diagrama de bloques del CD4047.
Figura 3: Diagrama de bloques del CD4047 [Anexo C]
2.1.3. Filtros Activos
Los filtros activos son redes eléctricas que alteran características de amplitud o fase de la señal
de entrada con respecto a su frecuencia. Los tipos de filtros se pueden clasificar según su respuesta
en la frecuencia, los distintos tipos se mencionan a continuación.
Escuela de Ingeniería Eléctrica 4 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
z Pasa bajos, como su nombre lo dice, permite el paso de las bajas frecuencias, hasta una má-
xima, la cual es su frecuencia de corte.
z Pasa altos, permite el paso a partir de una frecuencia de corte hacia frecuencias más altas.
z Pasa banda, permite el paso entre dos frecuencias de corte establecidas.
z Rechaza banda, impide el paso de las frecuencias en un intervalo específico entre sus dos
frecuencias de corte.
z Pasa todo, este filtro permite el paso de todas las frecuencias, pero se caracteriza por generar
un desfase variante según la frecuencia de la onda.
Para realizar el filtro, se pueden elegir entre distintos tipos de aproximaciones para la función
de transferencia. De las más utilizadas son Butterworth y Tschebyscheff o Chebyshev. La aproxiam-
ción de Butterworth presenta una gran uniformidad en la banda de paso del filtro, es decir, tiende a
ser muy constante en su ganancia. Mientras que Chebyshev tiende a generar un rizado en su ban-
da de paso, lo cual genera que las ganancias no tiendan a ser uniformes para distintas frecuencias
dentro del pasa bandas.
2.2. Cuestionario
1. ¿Por qué un sistema electrónico puede llegar a oscilar? Un sistema electrónico con retro-
alimentación negativa llega a oscilar cuando sus polos de la función de transferencia de lazo
cerrado (FTLC) se encuentran situados sobre el eje imaginario del plano complejo y además
no poseen parte real. En este caso el sistema presentara una salida oscilatoria de tipo senoi-
dal.
2. ¿Un oscilador presenta entradas? ¿Por qué si/no? Un oscilador no presenta entradas, al ser
un sistema realimentado no son necesarias las entradas externas, ya que al oscilar la estabi-
lidad es muy marginal, por lo que requieren únicamente una pequeña perturbación, tratán-
dose así de circuitos capaces de generar la oscilación sin necesidad de una entrada externa.
3. ¿Qué diferencias existen entre el CD4047 y el LM555? ¿Qué fortalezas presentan uno con
respecto al otro? Agrupe estas fortalezas/debilidades en una tabla.
Primeramente el CD4047 es un multivibrador que presenta distintos modos de operación,
astable y monoestable, de fácil ajuste y con un ciclo de trabajo del 50 %. En cambio el LM555
es un circuito integrado sencillo de bajo costo, donde sus principales aplicaciones residen
como multivibrador astable y monoestable. Entre las diferencias que se encuentran, el LM555
Escuela de Ingeniería Eléctrica 5 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
es de menor tamaño y de menor costo comparado el CD4047, en el caso del CD4047 su ciclo
de trabajo es constante en comparación con el LM555 que es ajustable, LM555 puede disipar
más que el CD4047, el CD4047 es de mas fácil ajuste ya que esto se hace solamente mediante
una resistencia y un capacito. En resumen estas fortalezas/debilidades se encuentran en la
tabla 1.
Tabla 1: Comparación LM555 y CD4047
4. Investigue un poco sobre el diseño de filtros. ¿Es lo mismo que un filtro procese una señal
cuadrada que una senoidal pura? (Recuerde Fourier). Los filtros son redes eléctricas que
alteran las características de la señal de entrada tales como la amplitud o fase de la misma,
esto con respecto a su frecuencia. Los hay de viarios tipos según su construcción, RLC pasivos,
RC activos o capacitores conmutados, entre otros.
Mediante el uso de Fourier se sabe que una señal cuadrado es expresado mediante una suma
infinita de armónicos impares, en otras palabras expresada como una suma de señales senoi-
dales a distintas frecuencias. Entonces el filtro al procesar una señal senoidal pura, esta va a
estar afectada debido a una única frecuencia, mientras que una señal cuadrada el procesa-
miento es distinto, ya que se verán afectadas su forma y ganancia debido a que se afectan sus
distintos componentes senoidales, esto independiente de la frecuencia de la onda cuadrado.
Escuela de Ingeniería Eléctrica 6 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
3. LISTA DE EQUIPOS
En la Tabla 2 se tienen los equipos que se utilizarán a lo largo de la presente práctica en cada
sesión, con su respectivo modelo y placa.
Tabla 2: Lista de Equipos
Equipo Marca Placa
Osciloscopio Tektronix 280686
Generador de señales Tektronix 345589
Fuente DC 1 Tektronix 189875
Fuente DC 2 Tektronix 343471
Multímetro Tektronix 329740
Escuela de Ingeniería Eléctrica 7 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
4. LISTA DE COMPONENTES
Tabla 3: Lista de Componentes
Componente Sigla V. Teórico V. Real
Resistor R1 2200 Ω 2208 Ω
Resistor R2 2200 Ω 2154 Ω
Resistor R3 2200 Ω 2201 Ω
Capacitor C1 15 nF 15,59 nF
Capacitor C2 10 nF 10,72 nF
Capacitor C3 10 nF 10,75 nF
Capacitor C4 47 uF 45 uF
Resistor R4 15 kΩ 14,64 kΩ
Resistor R5 15 kΩ 15,12 kΩ
Capacitor C5 10 nF 10,49 nF
Capacitor C6 470 nF 487 nF
Resistor R6 1,5 kΩ 1,488 kΩ
Resistor R7 1,5 kΩ 1,492 kΩ
Capacitor C7 470 nF 484 nF
Resistor R8 47 Ω 47,4 Ω
Capacitor C8 100 nF 102,5 nF
Capacitor C9 220 nF 215 nF
Resistor R9 1 kΩ 986 Ω
Resistor R10 5,6 kΩ 5,53 kΩ
Capacitor C10 100 nF 99,5 nF
Capacitor C11 100 nF 101,6 nF
Resistor R11 330 Ω 320 Ω
Resistor R12 680 Ω 668 Ω
Capacitor C12 100 nF 101,6 nF
Capacitor C13 220 nF 236,7 nF
Escuela de Ingeniería Eléctrica 8 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Tabla 4: Lista de Componentes 2
Componente Sigla V. Teórico V. Real
Resistor R13 560 Ω 562 Ω
Resistor R14 100 Ω 100,7 Ω
Capacitor C14 100 nF 95,3 nF
Capacitor C15 100 nF 98,8 nF
Resistor R15 6800 Ω 6,71 kΩ
Resistor R16 3300 Ω 3,34 kΩ
Resistor R17 1 kΩ 1006 Ω
Resistor R18 1 kΩ 986 Ω
Resistor R19 1 kΩ 1003 Ω
Resistor R20 1 kΩ 978 Ω
Amplificador operacional LF353 LF353 - 2 unidades
Diodo 1N4001 - 4 unidades
Transistor 2N2222 - 1 unidad
Multivibrador LM555 - 2 unidades
Multivibrador CD4047 - 1 unidad
Escuela de Ingeniería Eléctrica 9 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
5. DISEÑO CORREGIDO
5.1. I Parte: Osciladores
En esta parte se diseñará el circuito mostrado en la figura 4.
Figura 4: Circuito oscilador a diseñar
5.1.1. Condición de oscilación
Para que dicho circuito oscile, se debe encontrar la condición o relación entre sus componen-
tes, con la condición de que Rx = 3 R. Para ello se busca su condición de oscilación a partir del
método de Van Valkenburg el cual estipula que se debe abrir el lazo de realimentación principal y
determinar la FTLA. Una vez que se obtiene la FTLA se continúa con el procedimiento de diseño
que se presenta más adelante.
Por lo tanto, en este caso el lazo de realimentación principal es el que viene de Vo a Vx. Por lo
tanto se abre dicho lazo, y a la entrada del mismo se denomina VT . Esto se presenta en la figura
5. Así la FTLA será de la forma V o/VT . Para poder obtener la FTLA se determinarán las relaciones
entre las tensiones Vo, VT , Vx y Vo1.
Escuela de Ingeniería Eléctrica 10 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 5: Circuito oscilador a calcular su FTLA
La FTLA se determinará con la relación que se presenta en la ecuación (6).
FTLA =VoVT
=V o
Vo1
Vo1V x
V x
VT(6)
La relación del amplificador operacional U2, es la de un inversor. La cual se presenta en la ecua-
ción (7).
V0Vo1
=−RX
R= −3 (7)
La relación de las tensiones del primer amplificador operacional U1, es la de un integrador.
Dicha relación se presenta en la ecuación (8).
V01VX
=−1
SC1R(8)
Finalmente para la relación de Vx/VT se utiliza el principio de superposición y de CCV para U1.
De manera que V − de U1 está conectada a tierra. Así se obtienen las ecuaciones de (9) a (13).
Vx =V01R//
1SC2
R// 1SC2
+R+
VTR/2
R/2 + 1SC2
(9)
R//1
SC2
=R
1 +RSC2
(10)
Al reducir la ecuación (9) se obtiene la forma simplificada que se presenta en la ecuación (11)
Escuela de Ingeniería Eléctrica 11 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
para Vx en términos de VTyVo1.
Vx =Vo1 + VTRSC2
2 +RSC2
(11)
Ahora se utiliza (11) en (8) para así obtener Vo1 en término de sí mismo y de VT . Y se simplifica
en la ecuación (13).
Vo1 =−1
SC1R∗ Vo1 + VTRSC2
2 +RSC2
(12)
Vo1 =−VTRC2S
R2S2C1C2 + 2C1RS + 1(13)
Finalmente de las ecuaciones (7) y (13) se obtiene la relación VO/VT , es decir se obtiene la FTLA.
La cual se presenta en la ecuación (14).
FTLA =VOVT
=−3VTRC2S
R2S2C1C2 + 2C1RS + 1(14)
Con la FTLA se puede obtener la ecuación característica la cual tiene la forma que se presenta en
la ecuación (2). Para este sistema el polinomio característico N(s) tiene se presenta en la ecuación
(15).
N(s) = R2S2C1C2 + (2C1 − 3C2)RS + 1 = 0 (15)
Ahora siguiendo la condición presentada en la nota teórica en la ecuación (4) y (3). Se obtiene
la condición de oscilación la cual se presenta en la ecuación (16).
C1 =3C2
2(16)
Así los valores reales para los capacitores y resistores se presentan a continuación.
R = 2208Ω (17)
R = 2201Ω (18)
R = 2254Ω (19)
Rx = 6600Ω (20)
C1 = 15 nF (21)
C2 = 10 nF (22)
Escuela de Ingeniería Eléctrica 12 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Para Rx se utiliza un potenciómetro para poder tener una mayor precisión y un rango de ajuste.
5.1.2. Frecuencia de oscilación
Se tiene de la nota teórica la frecuencia de oscilación presentada en la ecuación (5) la cual se
determina a partir de las ecuaciones (15) y (3). La frecuencia de oscilación para este circuito se
presenta en la ecuación (23).
fo =1
2π
√1
R2C1C2
(23)
Al cambiar las variables de la resistencia y los capacitores por los valores de la ecuación (17)
a (22), se obtiene el valor de la frecuencia a la cual se espera que el circuito oscile, dicho valor se
presenta en la ecuación (24), con R siendo un promedio de los tres valores de los resistores.
fo = 5543Hz (24)
5.1.3. Simulación
Para la simulación se trabajó con el simulador de TINA. Se implementó el circuito de la Figura
4 y se determinaron condiciones iniciales las cuales permitieran a los capacitores tener suficiente
carga incial como para empezar a oscilar. La respuesta de la simulación se presenta en la Figura 6.
Figura 6: Respuesta en el tiempo para el oscilador, simulado en TINA.
De la Figura 6 se nota que la diferencia de tiempo de las ondas es de 178,14 µs el cual serí el
periodo. Al obtener la inversa del periodo se tiene la frecuencia del oscilador la cual se presenta en
Escuela de Ingeniería Eléctrica 13 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
la ecuación (25).
f = (178, 14 µs)−1 = 5613 Hz (25)
5.1.4. Oscilador de frecuencia variable
La forma que se encuentra para modificar la frecuencia sería modificando el Rx, que de por sí
según el diseño ya está previsto que sea un potenciómetro. Además revisando la fórmula de la re-
lación de los capacitores no se encuentra que la condición de oscilación dependa de los resistores.
Sin embargo, se encuentra difícil al revisar en la frecuencia de oscilación la procedencia de esa R,
se determina que no es del Rx = 3 R. Así que no se encuentra forma de modificar la frecuencia, más
que variar Rx, el cual no se determina con claridad si logrará su cometido.
5.2. II Parte : Multivibradores.
5.2.1. Utilizando dos LM555 y todos los componentes periféricos que requiera, diseñe el dis-
positivo multivibrador que genere la salida mostrada en la Figura 7:
Figura 7: Dispositivo multivibrador. [Anexo D]
Entonces la idea general es utilizar dos LM555 en modo astable como se muestra en la figura 8:
Figura 8: Diagrama de bloques del diseño del multivibrador.
Escuela de Ingeniería Eléctrica 14 de 69 Universidad de Costa Rica
IE0408 - Laboratorio Eléctrico II Reporte 2
Donde la idea general es que un LM555 maneje al otro Lm555, de manera que el IC1 haga que el
IC2 cambia la frecuencia cada medio segundo, para esto se configuran los dos a modo astable con
ciclo de trabajo del 50 %. Ahora para el primer el primer LM555 el IC1, se configura a una frecuencia
de 1 Hz y un ciclo de trabajo de D=0,5, entonces para lograr esto se usa la configuración mostrada
en la figura 9:
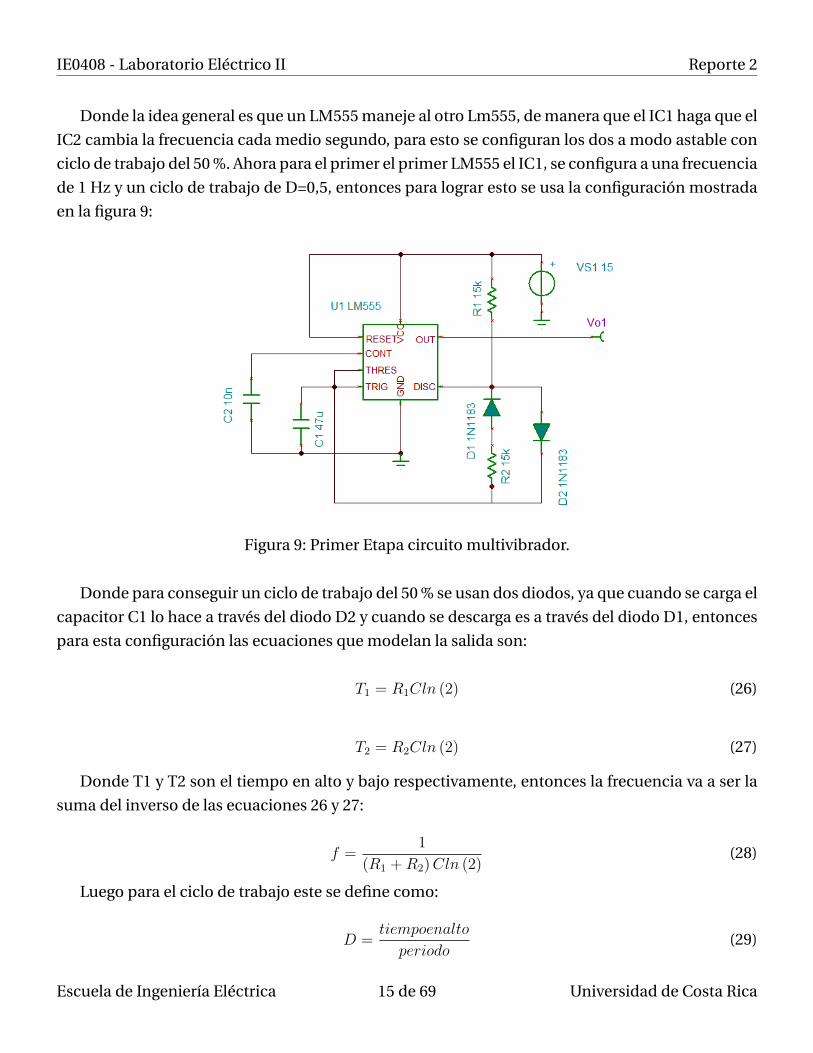
Figura 9: Primer Etapa circuito multivibrador.
Donde para conseguir un ciclo de trabajo del 50 % se usan dos diodos, ya que cuando se carga el
capacitor C1 lo hace a través del diodo D2 y cuando se descarga es a través del diodo D1, entonces
para esta configuración las ecuaciones que modelan la salida son:
T1 = R1Cln (2) (26)
T2 = R2Cln (2) (27)
Donde T1 y T2 son el tiempo en alto y bajo respectivamente, entonces la frecuencia va a ser la
suma del inverso de las ecuaciones 26 y 27:
f =1
(R1 +R2)Cln (2)(28)
Luego para el ciclo de trabajo este se define como:
D =tiempoenalto
periodo(29)
Escuela de Ingeniería Eléctrica 15 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Por lo que:
D =R1
R1 +R2
(30)
Entones para lograr una frecuencia f1=1 Hz y D=0,5, entonces de la ecuación () para lograr
D=0,5:
1
2=
R1
R1 +R2
→ 2R1 + 2R2 = R1
R1 = R2
Lo que lleva a que las resistencia deben tener el mismo valor, entonces ahora se va a fijar el valor
del capacitor C1 para lograr la frecuencia de 1 Hz y despejar R1+R2 de la ecuación, entonces con
C1=47 uF:
R1 +R2 =1
47x10−6ln (2)
R1 +R2 = 30, 7 kΩ
Para lograr esto se usan valores comerciales de resistencias:
R1 = R2 = 15kΩ
Siendo los valores reales:
R1 = 14, 64kΩ R2 = 15, 12kΩ
C = 45 µF
Entonces con estos valores se obtiene una frecuencia teórica de:
f1,teorica = 1, 078Hz
Ahora simulando en TINA el circuito se obtiene:
Escuela de Ingeniería Eléctrica 16 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 10: Simulación primer etapa.
Donde la frecuencia de la simulación en TINA es:
f1,sim =1
0, 976Hz = 1, 02Hz
Con un porcentaje de error del Pe = 5, 68 %.
Luego se coloca un capacitor de 10 nF conectado a tierra en la patilla 5 control, esto para mejo-
rar la estabilidad del LM555. Los diodos usados son los de uso común de la serie 4000, de capacidad
de 1 A, en este caso los 1N4001.
Ahora se diseña la segunda etapa del LM555 el IC2, usando la misma configuración de la etapa
anterior, pero debe lograr producir en su salida dos distintas frecuencias, una de 1000 Hz y otra de
la mitad de esta 500 Hz, como se muestra en la figura 8. Para lograr esto lo que se hace es que de
la ecuación (28), lo único modificable para lograr esto es la capacitancia, ya que si se modifican
el valor de las resistencias lo hace el ciclo de trabajo. Entonces la idea es que primero se logre la
frecuencia de 500 Hz con cierto valor de capacitancia y luego se agregue otro valor de capacitancia
en paralelo del mismo valor para que se logre la frecuencia de 1000 Hz. Entonces de la ecuación 28
con un valor de capacitancia de 0,47 uF:
R1 +R2 =1
0, 47x10−6ln (2)
R1 +R2 = 3069, 6 Ω
Para lograr esto se usan valores comerciales de resistencias:
Escuela de Ingeniería Eléctrica 17 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
R1 = R2 = 1500 Ω
Con valores reales de:
R3 = 1492Ω
R4 = 1488 Ω
C3 = 487nF
C4 = 10, 49nF
C5 = 508nF
Entonces con estos valores se obtiene una frecuencia teórica de:
f2,teorica = 994Hz
Entonces si se agrega otra capacitancia del mismo valor en paralelo, estas se suman y logra una
frecuencia de:
f3,teorica = 486, 6Hz
Para lograr que conecte y desconecte el capacitor se usa un switch como se muestra en la figura
8, que es controlador por el IC1, el circuito de esta etapa se muestra en la figura 11:
Figura 11: Segunda Etapa circuito multivibrador.
Escuela de Ingeniería Eléctrica 18 de 69 Universidad de Costa Rica
IE0408 - Laboratorio Eléctrico II Reporte 2
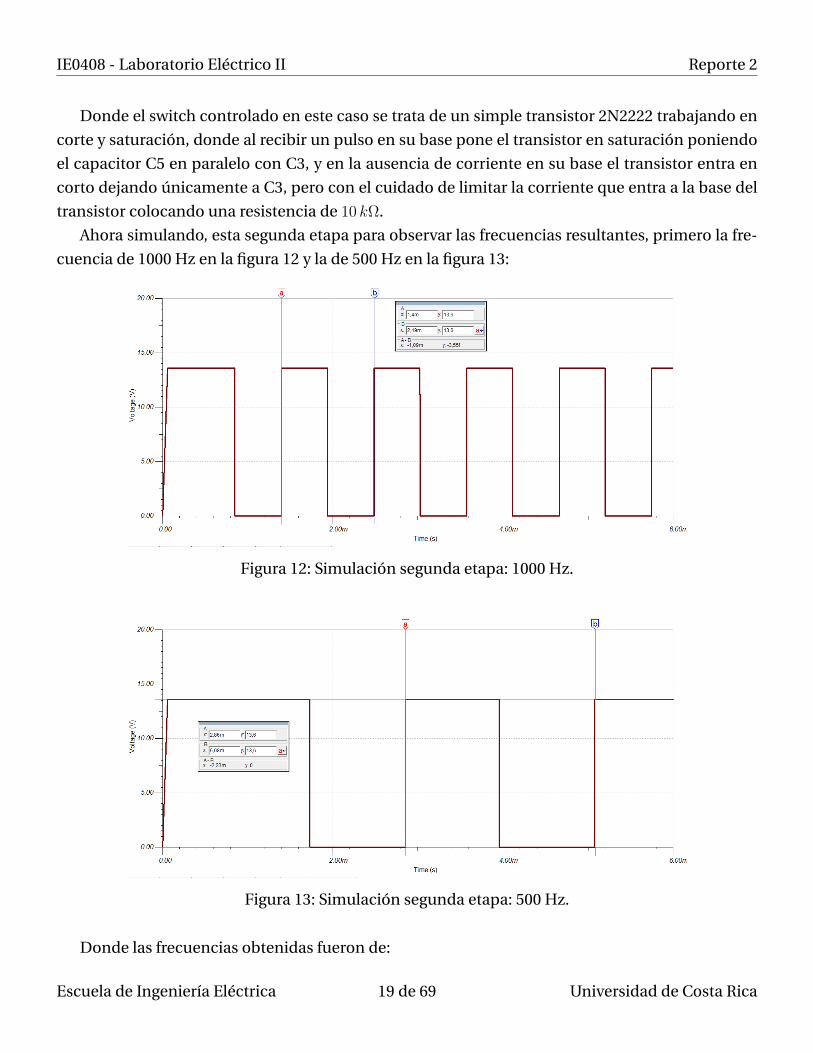
Donde el switch controlado en este caso se trata de un simple transistor 2N2222 trabajando en
corte y saturación, donde al recibir un pulso en su base pone el transistor en saturación poniendo
el capacitor C5 en paralelo con C3, y en la ausencia de corriente en su base el transistor entra en
corto dejando únicamente a C3, pero con el cuidado de limitar la corriente que entra a la base del
transistor colocando una resistencia de 10 kΩ.
Ahora simulando, esta segunda etapa para observar las frecuencias resultantes, primero la fre-
cuencia de 1000 Hz en la figura 12 y la de 500 Hz en la figura 13:
Figura 12: Simulación segunda etapa: 1000 Hz.
Figura 13: Simulación segunda etapa: 500 Hz.
Donde las frecuencias obtenidas fueron de:
Escuela de Ingeniería Eléctrica 19 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
f2,sim =1
1, 09x10−3Hz = 917, 4Hz
f3,sim =1
2, 23x10−3Hz = 448, 4Hz
Ahora el circuito completo es el mostrado en la figura 14:
Figura 14: Circuito completo multivibrador.
Ahora la simulación del circuito completo se muestra en la figura 15:
Figura 15: Simulación circuito completo.
De la figura 15, se nota como empieza a una frecuencia de 1000 Hz y luego se reduce a la 500 Hz
Escuela de Ingeniería Eléctrica 20 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
para después volver a la 1000 Hz y asi sucesivamente provocando dos tonos a frecuencias diferentes
que pueden ser escuchados por medio del parlante SPK de 8 Ohms.
5.2.2. Construya un generador de señales cuadradas de frecuencia variable entre 100 Hz a 10
kHz con un CD4047 y todos los componentes periféricos que requiera.
Al construir el generador de señales cuadradas de frecuencia variables con el CD4047, lo único
que se varía en este circuito integrado es el modo de conexión astable y los parámetros de Resis-
tencia y Capacitancia.
Donde la conexión se saca de la hoja del fabricante, de la Truth table se escogió la de la función
multivibrador astable el modo Free-Running (corrida libre), que indica que las patillas 4,5,6,14 van
conectadas a Vcc y las patillas 7,8,9,10 van a tierra y la salida se toma de 10. Luego según la ecuación
dada en la hoja del fabricante para el cálculo de la frecuencia tomando la salida en patilla 10:
f =1
4, 40RC(31)
Donde el valor de R va a ser variable para variar la frecuencia, y el valor de C fijo, en este caso
para obtener la frecuencia máxima se utiliza un capacitor de 470 nF, entonces de la ecuación (31):
R =1
4, 4 ∗ 470x10−9 ∗ 10000= 48, 35Ω
Donde el valor más cercano de resistencia es 47 Ω. Luego para la frecuencia mínima:
R =1
4, 4 ∗ 470x10−9 ∗ 100= 4835 Ω
Por lo que se utiliza un potenciómetro de 5 kΩ.
El circuito es el mostrado en la siguiente figura 16
Escuela de Ingeniería Eléctrica 21 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 16: Circuito generador de señales cuadradas
Entonces los valores de frecuencia teóricos van desde los 95,8 Hz hasta 10,3 kHz.
5.2.3. Verifique el funcionamiento del circuito diseñado el punto 3. con varias simulaciones (al
menos 3) comparando los valores de frecuencia simulados con los teóricos definidos.
Debido a que las herramientas de software de simulación de circuitos electrónicos disponibles
no poseen este componente a causa de que es reciente no se pudieron realizar las simulaciones de
este generador de señales cuadradas.
5.3. III Parte :Filtros Activos
Como se pide que los tres filtros tengan el mínimo rizado posible, entonces se elige la aproxi-
mación por Butterworth. A continuación se expone el diagrama de bloques para el ecualizador en
la Figura 17.
Escuela de Ingeniería Eléctrica 22 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 17: Diagrama de bloques del ecualizador
Para el diseño de esta parte se propone el uso de dos filtros pasa bajos de segundo orden y dos
filtros pasa altos de segundo orden. De manera que uno de los filtros pasa bajos sirve para las bajas
frecuencias, uno de los pasa altos para las altas frecuencias y el pasa bandas se compone de los dos
filtros restantes. El pasa bandas se obtiene a partir de realizar en cascada el filtro pasa altos con el
filtro pasa bajos.
5.3.1. Filtro Pasa Bajos
Para este filtro se ha pedido una banda de 0 Hz a 330 Hz y como ya se mencionó se usará la
aproximación por Butterworth. Para este filtro se utilizará la topología Sallen Key no inversor para
pasa bajos, dicha topologia se presenta en la figura 18.
Figura 18: Topología Sallen Key no inversor para pasa bajos
Escuela de Ingeniería Eléctrica 23 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
La ventaja que permite esta topología es que se encuentra el valor de sus componentes a partir
de la frecuencia de corte y de dos valores a1 y b1. Las fórmulas para los valores de los componentes
se presentan en las ecuaciones (32) y (33). Donde a1, b1 se determinan de la tabla del anexo 1, y el
valor de C1 se elige para determinar el de C2. La ecuación (34) presenta la función de transferencia
para esta topología.
R1 = R2 =a1C2 ∓
√a13C2
2 − 4b1C1C2
4πfcC1C2
(32)
C2 ≥ C14b1a21
(33)
H(s) =1
1 + 2πfcC1(R1 +R2)s+ 4π2f 2cR1R2C1C2S2
Revisando la tabla del anexo 1 para Butterworth se tienen los valores de a1 = 1, 4142 y para
b1 = 1. Así con un valor de C1 = 100 nF se determinan los valores para los resistores y C1. Se
usará fc = 350Hz para agregar un pequeño intervalo de precaución por el verdadero valor de los
componentes.
C1 = 100 nF (34)
C2 ≥ 200, 004 nF− > C2 = 220 nF (35)
R1 = 930Ω− > R1 = 1000Ω (36)
R2 = 5500Ω− > R2 = 5600Ω (37)
Y los valores reales del experimento fueron de:
C1 = 102, 5 nF (38)
C2 = 215, 2 nF (39)
R1 = 986Ω (40)
R2 = 5530Ω (41)
Al realizar un barrido de frecuencias con los valores comerciales, se obtuvo el barrido que se
Escuela de Ingeniería Eléctrica 24 de 69 Universidad de Costa Rica
IE0408 - Laboratorio Eléctrico II Reporte 2
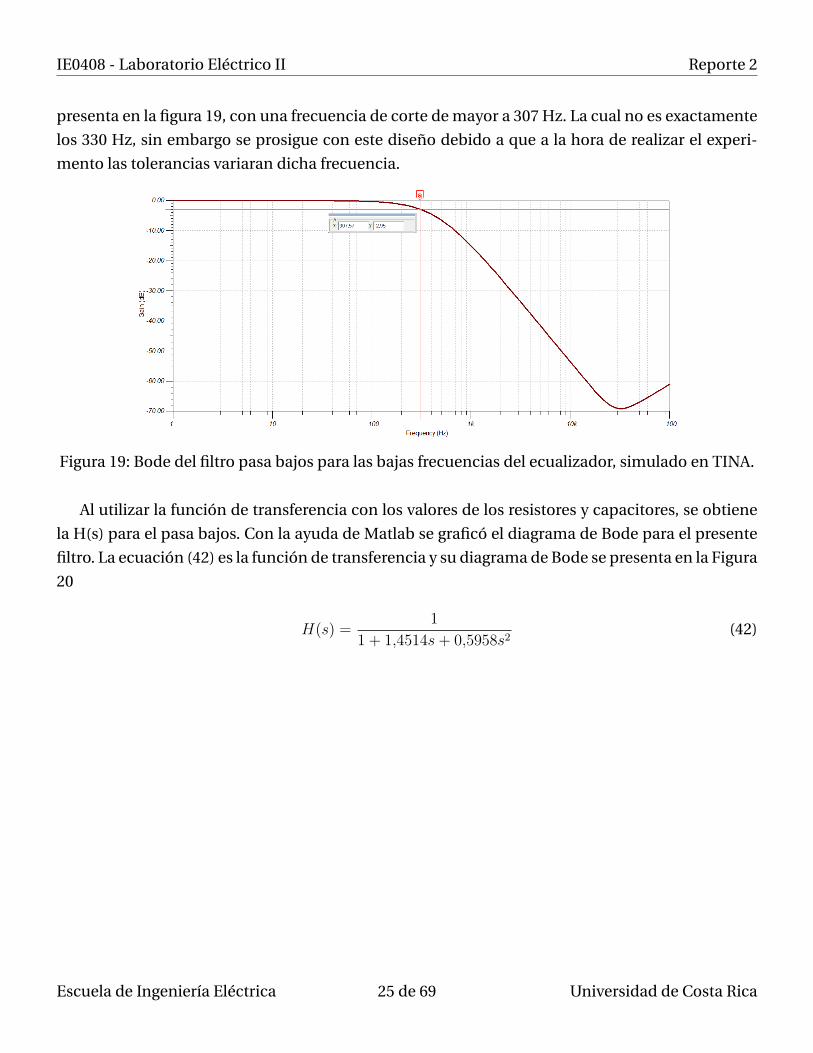
presenta en la figura 19, con una frecuencia de corte de mayor a 307 Hz. La cual no es exactamente
los 330 Hz, sin embargo se prosigue con este diseño debido a que a la hora de realizar el experi-
mento las tolerancias variaran dicha frecuencia.
Figura 19: Bode del filtro pasa bajos para las bajas frecuencias del ecualizador, simulado en TINA.
Al utilizar la función de transferencia con los valores de los resistores y capacitores, se obtiene
la H(s) para el pasa bajos. Con la ayuda de Matlab se graficó el diagrama de Bode para el presente
filtro. La ecuación (42) es la función de transferencia y su diagrama de Bode se presenta en la Figura
20
H(s) =1
1 + 1,4514s+ 0,5958s2(42)
Escuela de Ingeniería Eléctrica 25 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 20: Bode del filtro pasa bajos para las bajas frecuencias del ecualizador, simulado enMATLAB.
La frecuencia de corte según Matlab resulta en 350 Hz.
5.3.2. Filtro Pasa altos
Para este filtro se requiere una fc = 3300 Hz. La topología de los filtros pasa altos se presenta en
la Figura 21, esto para el caso de un Sallen Key no inversor. Las fórmulas para calcular los valores
de los componentes se exponen en las ecuaciones (43) y (44). Donde en este caso se permite elegir
los valores de las capacitancias.
Escuela de Ingeniería Eléctrica 26 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 21: Topología filtro pasa altos Sallen Key no inversor.
R1 =1
πfca1(43)
R2 =a1
4πfcCb1(44)
Como se utiliza la aproximación por Butterworth a1 = 1, 4142 y b1 = 1. Eligiendo una capacitan-
cia de 100 nF para los dos capacitores, se obtienen los valores para los dos resistores. Además se
determinan los valores comerciales disponibles mas cercanos a los teóricos.
R1 = 682Ω− > 680Ω (45)
R2 = 341Ω− > 330Ω (46)
Los valores de los componentes utilizados en el laboratorio se presentan a continuación.
R1 = 668Ω (47)
R2 = 321Ω (48)
C1 = 99, 5 nF (49)
C2 = 101, 6 nF (50)
Con dichos valores se procede a simular el circuito con TINA. Se obtiene un barrido de frecuen-
cias, y se presenta en la figura 22. La frecuencia de corte resulta igual a 2410 Hz la cual está lejana a
Escuela de Ingeniería Eléctrica 27 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
los 3300 Hz.
Figura 22: Bode del filtro pasa altos para las altas frecuencias del ecualizador, simulado en TINA.
Se obtiene el diagrama de Bode en MATLAB a partir de la función de transferencia. Dicho dia-
grama de Bode se presenta en la Figura 23. Donde se ve que la frecuencia de corte es de aproxima-
damente 3300 Hz.
Figura 23: Bode del filtro pasa altos para las altas frecuencias del ecualizador, simulado en MATLAB.
Escuela de Ingeniería Eléctrica 28 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
5.3.3. Filtro Pasa Bandas
Para este filtro, como ya se explicó se utilizarán dos filtros en cascada. Un pasa bajos con la
frecuencia de corte en 3300 Hz y un pasa altos con la frecuencia de corte en 330 Hz. Para ellos se
utilizarán las topologías ya propuestas así como sus ecuaciones para calcular los valores de sus
componentes. La topología propuesta en cascada se muestra en la Figura 24.
Figura 24: Filtro pasa bandas, a partir de las dos topologías en cascada.
Primeramente se diseñará el filtro pasa bajos. Como ya se dijo se necesita que tenga una fre-
cuencia de corte de 3300 Hz. Así recordando que se usa la aproximación de Butterworth se obtie-
nen los valores para los resistores y C2 con C1 = 100 nF. Buscando a su vez los valores disponibles
comerciales más cercanos.
C2 = 200 nF− > 220 nF (51)
R2 = 583Ω− > 560Ω (52)
R1 = 99Ω− > 100Ω (53)
Con los valores reales:
C1 = 95, 3 nF (54)
C2 = 236, 7 nF (55)
R2 = 562Ω (56)
R1 = 101Ω (57)
Escuela de Ingeniería Eléctrica 29 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Y luego, para el filtro pasa altos se eligen los capacitores de 100 nF. Con la frecuencia de corte en
330 Hz.
C1 = C2 = 100nF (58)
R1 = 6820Ω− > 6800Ω (59)
R2 = 3410Ω− > 3300Ω (60)
Siendo los valores reales los siguientes:
C1 = 95, 3 nF (61)
C2 = 99 nF (62)
R1 = 6710Ω (63)
R2 = 3340Ω (64)
Así con dichos valores se procede a obtener el diagrama de Bode con el simulador de TINA.
Dicho barrido de frecuencias se presenta en la Figura 25. Donde se ve que las frecuencia de corte
baja está en 2920 Hz y la de corte en alta 3170 Hz.
Figura 25: Barrido de frecuencias para el filtro pasa bandas, en TINA.
Para obtener el Bode en Matlab lo que se hace es obtener las funciones de transferencia de cada
uno de los filtros, y debido a que están en cascada se multiplican. Así se obtuvo el bode en MATLAB
de la Figura 26.
Escuela de Ingeniería Eléctrica 30 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 26: Bode para el filtro pasa bandas, en MATLAB.
5.3.4. Sumador
Se pide que para integrar las tres señales de los tres filtros, se utilice un sumador no inversor, al
cual se le pueda variar su ganancia. De manera que se utilizará el circuito de la Figura 27 con un
potenciómetro para así variar su ganancia.
Figura 27: Esquemático para el sumador.
Para encontrar el valor de V + se aplica super posición, ya que este valor depende de las tensio-
Escuela de Ingeniería Eléctrica 31 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
nes de salida de los 3 filtros.
V + = LP ∗ R3//R2
R1 +R3//R2+ PB
R1//R3
R1//R3 +R2+ Pa
R1//R2
R1//R2 +R3(65)
R1 = R2 = R3 = 1000Ω− > 1000Ω//1000Ω = 500Ω (66)
V + = LP1
3+ PB
1
3+ PA
1
3(67)
Y con la formula del no inversor, se obtiene el resultado en la ecuación 68
Vo = V +(1 +pot
R4) (68)
Vo = (LP + PB + PA) ∗ pot+R4
3R4(69)
Así al conectar en cascada de la misma forma que se encuentra en el diagrama de bloques de la
figura 17 se obtiene el ecualizador de tres bandas. El esquemático del ecualizador se presenta en la
Figura 28.
Figura 28: Esquemático del ecualizador.
Se intentó simular el circuito en TINA, sin embargo TINA no permitió realizar el barrido de
Escuela de Ingeniería Eléctrica 32 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
frecuencias, dado a que aparentemente el circuito es muy grande. Para MATLAB se sumaron las
tres funciones de transferencia de los distintos filtros para así obtener el diagrama de Bode del
sumador. No se tomó en cuenta el sumador como tal debido a que sólo usa resistores los cuales no
presentan mayor alteración con respecto a la frecuencia y además se sabe que el ancho de banda
del LF353 es muy grande. Por lo tanto con tales consideraciones se obtuvo el diagrama de bode de
la Figura 29.
Figura 29: Diagrama de bode del ecualizador, en MATLAB.
Finalmente en la tabla 5 se presentan las frecuencias obtenidas en las simulaciones para los
filtros.
Tabla 5: Valores de las frecuencias de los filtros
Filtro Frecuencia (Hz)Ideal TINA MATLAB
Pasa Bajos 330 307 330Pasa Bandas PA 330 250 334Pasa Bandas PB 3300 3170 3262Pasa altos 3300 2410 3294
Escuela de Ingeniería Eléctrica 33 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
6. RESULTADOS EXPERIMENTALES Y ANÁLISIS DE LOS RESUL-
TADOS
6.1. Oscilador
Una vez armado el circuito de la figura 4 se obtuvo una onda senoidal como se esperaba según
se muestra en la figura 30:
Figura 30: Salida circuito oscilador.
Y como se nota la frecuencia resultante del circuito fue de,
f = 6, 048kHz
Con un porcentaje de error del 2,41 % respecto al valor teórico de oscilación.
Escuela de Ingeniería Eléctrica 34 de 69 Universidad de Costa Rica
IE0408 - Laboratorio Eléctrico II Reporte 2
6.2. Multivibradores
6.2.1. LM555
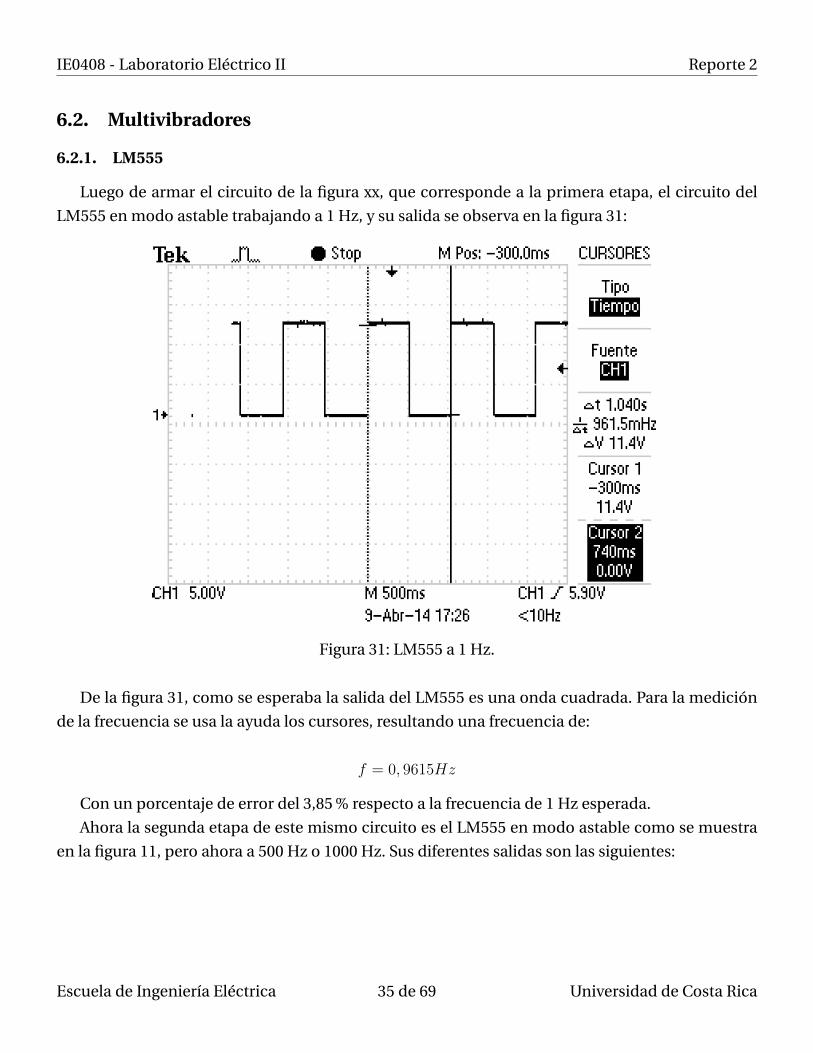
Luego de armar el circuito de la figura xx, que corresponde a la primera etapa, el circuito del
LM555 en modo astable trabajando a 1 Hz, y su salida se observa en la figura 31:
Figura 31: LM555 a 1 Hz.
De la figura 31, como se esperaba la salida del LM555 es una onda cuadrada. Para la medición
de la frecuencia se usa la ayuda los cursores, resultando una frecuencia de:
f = 0, 9615Hz
Con un porcentaje de error del 3,85 % respecto a la frecuencia de 1 Hz esperada.
Ahora la segunda etapa de este mismo circuito es el LM555 en modo astable como se muestra
en la figura 11, pero ahora a 500 Hz o 1000 Hz. Sus diferentes salidas son las siguientes:
Escuela de Ingeniería Eléctrica 35 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 32: Salida del Lm555 a 500 Hz.
Escuela de Ingeniería Eléctrica 36 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 33: Salida del LM555 a 1000 Hz.
Con porcentajes de error del 14,2 % y 11,1 % respectivamente de sus valores teóricos. Estos valo-
res altos de porcentaje de error son debido a la tolerancia de los componentes usados en el circuito.
Ahora si se conectan las dos etapas anteriores de acurdo a la figura 14, por medio de un transis-
tor uso como switch manejado por la primera etapa se obtiene la forma de onda como se muestra
en la figura 34:
Escuela de Ingeniería Eléctrica 37 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 34: Salida multivibrador LM555.
Como se observa se producen los dos tonos a una frecuencia de conmutación de 1 Hz, como se
esperaba.
6.2.2. CD4047
Luego de armar el circuito de la figura XX para el CD4047, y al variar el potenciómetro a su valor
máximo de resistencia se obtenía la frecuencia mínima de 100 Hz, pero al querer obtener la fre-
cuencia máxima de 10 kHz al poner el potenciómetro en cero Ohms, no se obtuvo esta frecuencia,
sino más bien una de 4 kHz, que dista mucho de la esperada. Esto es debido a la resistencia esco-
gida en el diseño con respecto al aspecto físico, ya que al escoger una resistencia tan pequeña de
47 Ω la resistencia entre los contactos de la protoboard afecta esta resistencia provocando que la
frecuencia de salida máxima sea de 4 kHz, entonces, la solución es aumentar la resistencia con tal
de que las resistencia parásitas sean despreciables en comparación con la R. Por lo que diseñando
de nuevo los componentes quedaría:
R =1
4, 4 ∗ 10nF ∗ 10k= 2272Ω = 2, 16kΩ
Y el potenciómetro de pot = 224kΩ = 250kΩ.
Escuela de Ingeniería Eléctrica 38 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Con estos nuevos valores calculados se obtienen de nuevo las nuevas frecuencias de salida,
representadas en las figuras 35 y 36.
Figura 35: Frecuencia de salida mínima CD4047.
Escuela de Ingeniería Eléctrica 39 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 36: Frecuencia de salida máxima CD4047.
Donde se nota como ahora si se acercan más a las frecuencias esperadas, con porcentajes de
error del 7 % y 8,76 %, debido al ajuste de componentes disponibles y su respectiva tolerancia.
6.3. Filtros
6.3.1. Filtro Pasa Bajos
Se procedió a armar el circuito de la figura 18, y se realizo el barrido de frecuencias para de-
terminar la frecuencia de corte experimental del circuito. En la figura 37 se muestra la gráfica del
barrido de frecuencias para el filtro pasa bajos.
Escuela de Ingeniería Eléctrica 40 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 37: Barrido de frecuencias filtro pasa bajos
La frecuencia de corte (punto rojo en la figura 37) es de 326Hz, con un porcentaje de error de
1, 21 %, este valor se debe a la tolerancia de los componentes, aunque es muy pequeño, por lo que
el filtro se comporta de muy buena manera.
6.3.2. Filtro Pasa Altos
Se procedió a armar el circuito de la figura 21, y se realizo el barrido de frecuencias para de-
terminar la frecuencia de corte experimental del circuito. En la figura 38 se muestra la gráfica del
barrido de frecuencias para el filtro pasa altos.
Figura 38: Barrido de frecuencias filtro pasa altos
La frecuencia de corte (punto rojo en la figura 38) es de 3346Hz, con un porcentaje de error de
Escuela de Ingeniería Eléctrica 41 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
1, 39 %, este valor se debe a la tolerancia de los componentes, aunque es muy pequeño, por lo que
el filtro se comporta de muy buena manera.
6.3.3. Filtro Pasa bandas
Se procedió a armar el circuito de la figura 21, y se realizo el barrido de frecuencias para de-
terminar la frecuencia de corte experimental del circuito. En la figura 39 se muestra la gráfica del
barrido de frecuencias para el filtro pasa bandas.
Figura 39: Barrido de frecuencias filtro pasa bandas
Las frecuencias de corte (puntos rojo en la figura 39) son de 318Hz y 3409Hz, con un porcentaje
de error de 3, 6 % y 3, 3 % respectivamente, este valor se debe a la tolerancia de los componentes,
a diferencia de los anteriores el error aumento, esto es debido a que la cantidad de componentes
aumenta por lo que la cantidad de tolerancias también aumenta, haciendo que crezca el error en
las frecuencias.
6.3.4. Sumador no inversor
Se procedió a armar el circuito de la figura 28, y se realizo el barrido de frecuencias para visua-
lizar el comportamiento del ecualizador completo. En la figura 40 se muestra la gráfica del barrido
de frecuencias para el filtro pasa bajos.
Escuela de Ingeniería Eléctrica 42 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 40: Barrido de frecuencias para el ecualizador.
Como es de esperar el ecualizador tiene máxima ganancia para las frecuencias muy bajas y
muy altas, para las frecuencias medias (en este caso entre 330Hz y 3300Hz) la ganancia tiende a
aumentar pero las frecuencias no logran pasar ya que no supera los -3dB que es la ganancia a la
que se presentan las frecuencias de corte.
6.3.5. FFT y dominio en el tiempo de los filtros
Ahora lo que se hace es poner en la entrada de cada filtro una onda cuadrada a una frecuencia de
2 kHz, pero como se sabe que la onda cuadrada es en realidad una suma de armónicos a distintas
frecuencias, los filtros no van a procesar una onda cuadrada de la misma forma que harían con
una sinusoidal pura afectando su amplitud y fase, sino que con una onda cuadrada va a afectar su
forma de onda. Esto se puede ver de la salida de los diferentes filtros a continuación.
Empezando con el filtro pasa bajos, en las figuras 41 y 42 se muestra el comportamiento del
filtro como FFT y en el dominio del tiempo para una frecuencia de 2kHz respectivamente.
Escuela de Ingeniería Eléctrica 43 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 41: FFT Filtro Pasa Bajos.
Escuela de Ingeniería Eléctrica 44 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 42: Respuesta en el dominio del tiempo Filtro Pasa Bajos.
De la figura 41 se puede ver de la FFT como el filtro atenuó las frecuencias altas dejando algunos
armónicos, ya que la frecuencia de corte esta muy por debajo de la frecuencia fundamental de la
onda cuadrada, resultando en el dominio del tiempo de la figura 42 una onda con su amplitud
disminuida 88 mV y forma alterada.
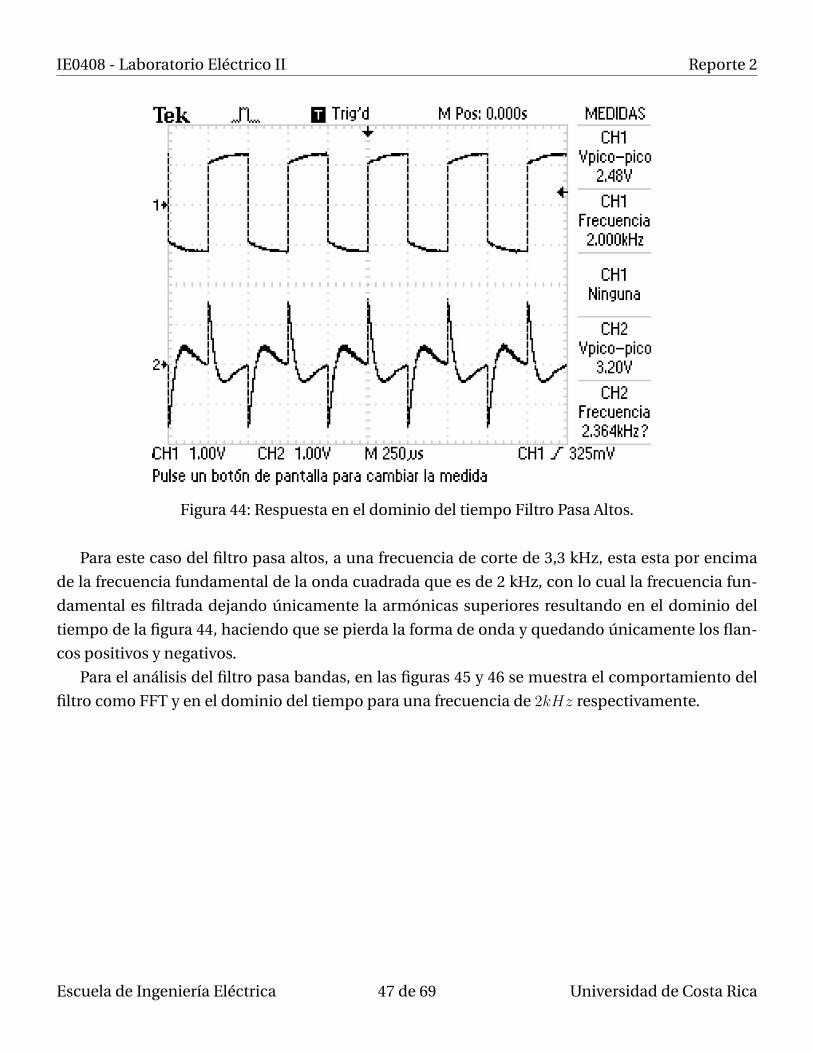
Ahora para el filtro pasa altas, en las figuras 43 y 44 se muestra el comportamiento del filtro
como FFT y en el dominio del tiempo para una frecuencia de 2kHz respectivamente.
Escuela de Ingeniería Eléctrica 45 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 43: FFT Filtro Pasa Altos.
Escuela de Ingeniería Eléctrica 46 de 69 Universidad de Costa Rica
IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 44: Respuesta en el dominio del tiempo Filtro Pasa Altos.
Para este caso del filtro pasa altos, a una frecuencia de corte de 3,3 kHz, esta esta por encima
de la frecuencia fundamental de la onda cuadrada que es de 2 kHz, con lo cual la frecuencia fun-
damental es filtrada dejando únicamente la armónicas superiores resultando en el dominio del
tiempo de la figura 44, haciendo que se pierda la forma de onda y quedando únicamente los flan-
cos positivos y negativos.
Para el análisis del filtro pasa bandas, en las figuras 45 y 46 se muestra el comportamiento del
filtro como FFT y en el dominio del tiempo para una frecuencia de 2kHz respectivamente.
Escuela de Ingeniería Eléctrica 47 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 45: FFT Filtro Pasa Bandas.
Escuela de Ingeniería Eléctrica 48 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 46: Respuesta en el dominio del tiempo Filtro Pasa Bandas.
Para este filtro, la frecuencia fundamental de la onda cuadrada queda en medio de la banda de
paso del filtro, resultando en el dominio del tiempo de la figura 46 una onda casi senoidal, ya que
se ven afectadas las armónicas que le dan la forma de onda cuadrada, quedando la fundamental y
pocas armónicas, haciendo que la onda resultante tenga tal forma senoidal.
Finalmente para el sumador con los tres filtros conectados y al poner en su entrada la misma
onda cuadrada anterior, en las figuras 47 y 48 se muestra el comportamiento del sumador para la
FFT y en el dominio del tiempo.
Escuela de Ingeniería Eléctrica 49 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 47: FFT sumador.
Escuela de Ingeniería Eléctrica 50 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
Figura 48: Respuesta en el dominio del tiempo sumador.
Para este sumador se combinan los efectos anteriores, atenuándose ciertas armónicas y dejan-
do la fundamental sin filtrar, resultando en el dominio del tiempo la onda mostrada en la figura 48
donde se afecta la forma de onda original, pero sin llegar al extremo de quedar una forma de onda
sinusoidal ni tampoco que solo se visualicen los flancos.
Escuela de Ingeniería Eléctrica 51 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
7. CONCLUSIONES Y RECOMENDACIONES
7.1. Conclusiones
z Gracias al circuito realimentado oscilador diseñado se pudo comprobar el funcionamiento
de un generador de señales de frecuencia constante, sin la necesidad de una señal de entrada
externa.
z El valor de frecuencia de la onda de salida del oscilador, fue muy cercano al diseñado, demos-
trando la utilidad de este tipo de circuitos.
z Se pudo ver como los LM555 son muy versátiles para producir ondas cuadradas a distintas
frecuencias y ciclo de trabajo variable.
z Se pudo conectar dos etapas de LM555 para producir un sonido de 2 tonos diferentes.
z En el caso del CD4047 es de más fácil implementación que el LM555, pero con una desventaja
de que el ciclo de trabaja siempre es del 50 %.
z Es más fácil variar la frecuencia en un CD4047 para un ciclo de trabajo constantes, comparado
con un LM555.
z El comportamiento de los filtros activo fue el esperado según el diseño, comprobándose sus
distintas frecuencias de corte, con bajos índices de error.
z El ecualizador implementado mediante el circuito sumador, permitió que se sumaran las dis-
tintas salidas de los filtros en el dominio de la frecuencia.
z Al procesar la onda cuadrada mediante los distintos filtros, se comprobó como la señal cuadra
está compuesta una senoidal pura que marca la frecuencia fundamental así como infinitas
armónicas que le dan forma a los flancos verticales.
7.2. Recomendaciones
z A la hora de realizar el diseño, tener en cuenta el aspecto físico, como en el caso del diseño
para el CD4047 que la resistencia para sita de la protoboard afecto la salida del circuito.
z Fijarse bien en la tolerancia de los componentes porque estos llegan a afectar las frecuencias
de salida de los multivibradores así como las frecuencias de corte de los distintos filtros.
Escuela de Ingeniería Eléctrica 52 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
8. BIBLIOGRAFÍA
Referencias
[1] Karris, S. (2005). Electronic Devices and Amplifier Circuits with MATLAB Applications.
U.S.A.: Orchad Publications.
[2] Abarca Calderón, F. (2013). Documentos electrónicos dados en el curso de Electrónica II.
U.C.R. S.J., Costa Rica.
[3] LM555/NE555/SA555, Fairchild Semiconductor Corporation, California, SJ, 2002.
Escuela de Ingeniería Eléctrica 53 de 69 Universidad de Costa Rica

IE0408 - Laboratorio Eléctrico II Reporte 2
9. ANEXOS
9.1. Anexo A. Tablas para la función de transferencia para filtros
Escuela de Ingeniería Eléctrica 54 de 69 Universidad de Costa Rica

Table 20.8: Butterworth Coefficients
n i ai bi ki = fCi /fC Qi
1 1 1.0000 0.0000 1.000 —
2 1 1.4142 1.0000 1.000 0.71
3 1 1.0000 0.0000 1.000 —
2 1.0000 1.0000 1.272 1.00
4 1 1.8478 1.0000 0.719 0.54
2 0.7654 1.0000 1.390 1.31
5 1 1.0000 0.0000 1.000 —
2 1.6180 1.0000 0.859 0.62
3 0.6180 1.0000 1.448 1.62
6 1 1.9319 1.0000 0.676 0.52
2 1.4142 1.0000 1.000 0.71
3 0.5176 1.0000 1.479 1.93
7 1 1.0000 0.0000 1.000 —
2 1.8019 1.0000 0.745 0.55
3 1.2470 1.0000 1.117 0.80
4 0.4450 1.0000 1.499 2.25
8 1 1.9616 1.0000 0.661 0.51
2 1.6629 1.0000 0.829 0.60
3 1.1111 1.0000 1.206 0.90
4 0.3902 1.0000 1.512 2.56
9 1 1.0000 0.0000 1.000 —
2 1.8794 1.0000 0.703 0.53
3 1.5321 1.0000 0.917 0.65
4 1.0000 1.0000 1.272 1.00
5 0.3473 1.0000 1.521 2.88
www.newnespress.com
430 Chapter 20

IE0408 - Laboratorio Eléctrico II Reporte 2
9.2. Anexo B. Hoja del frabricante LM555
Escuela de Ingeniería Eléctrica 56 de 69 Universidad de Costa Rica

LM555
www.ti.com SNAS548C –FEBRUARY 2000–REVISED MARCH 2013
Electrical Characteristics (1) (2)
(TA = 25°C, VCC = +5V to +15V, unless otherwise specified)
Limits
Parameter Test Conditions LM555C Units
Min Typ Max
Supply Voltage 4.5 16 V
Supply Current VCC = 5V, RL = ∞ 3 6mAVCC = 15V, RL = ∞ 10 15
(Low State) (3)
Timing Error, Monostable
Initial Accuracy 1 %
Drift with Temperature RA = 1k to 100kΩ, 50 ppm/°C
C = 0.1μF, (4)
Accuracy over Temperature 1.5 %
Drift with Supply 0.1 %/V
Timing Error, Astable
Initial Accuracy 2.25 %
Drift with Temperature RA, RB = 1k to 100kΩ, 150 ppm/°C
C = 0.1μF, (4)
Accuracy over Temperature 3.0 %
Drift with Supply 0.30 %/V
Threshold Voltage 0.667 x VCC
Trigger Voltage VCC = 15V 5 V
VCC = 5V 1.67 V
Trigger Current 0.5 0.9 μA
Reset Voltage 0.4 0.5 1 V
Reset Current 0.1 0.4 mA
Threshold Current (5) 0.1 0.25 μA
Control Voltage Level VCC = 15V 9 10 11V
VCC = 5V 2.6 3.33 4
Pin 7 Leakage Output High 1 100 nA
Pin 7 Sat (6)
Output Low VCC = 15V, I7 = 15mA 180 mV
Output Low VCC = 4.5V, I7 = 4.5mA 80 200 mV
Output Voltage Drop (Low) VCC = 15V
ISINK = 10mA 0.1 0.25 V
ISINK = 50mA 0.4 0.75 V
ISINK = 100mA 2 2.5 V
ISINK = 200mA 2.5 V
VCC = 5V
ISINK = 8mA V
ISINK = 5mA 0.25 0.35 V
(1) All voltages are measured with respect to the ground pin, unless otherwise specified.(2) Absolute Maximum Ratings indicate limits beyond which damage to the device may occur. Operating Ratings indicate conditions for
which the device is functional, but do not ensure specific performance limits. Electrical Characteristics state DC and AC electricalspecifications under particular test conditions which ensures specific performance limits. This assumes that the device is within theOperating Ratings. Specifications are not ensured for parameters where no limit is given, however, the typical value is a good indicationof device performance.
(3) Supply current when output high typically 1 mA less at VCC = 5V.(4) Tested at VCC = 5V and VCC = 15V.(5) This will determine the maximum value of RA + RB for 15V operation. The maximum total (RA + RB) is 20MΩ.(6) No protection against excessive pin 7 current is necessary providing the package dissipation rating will not be exceeded.
Copyright © 2000–2013, Texas Instruments Incorporated Submit Documentation Feedback 3
Product Folder Links: LM555

LM555
SNAS548C –FEBRUARY 2000–REVISED MARCH 2013 www.ti.com
Figure 14. Time Delay
ASTABLE OPERATION
If the circuit is connected as shown in Figure 15 (pins 2 and 6 connected) it will trigger itself and free run as amultivibrator. The external capacitor charges through RA + RB and discharges through RB. Thus the duty cyclemay be precisely set by the ratio of these two resistors.
Figure 15. Astable
In this mode of operation, the capacitor charges and discharges between 1/3 VCC and 2/3 VCC. As in thetriggered mode, the charge and discharge times, and therefore the frequency are independent of the supplyvoltage.
Figure 16 shows the waveforms generated in this mode of operation.
VCC = 5V Top Trace: Output 5V/Div.TIME = 20μs/DIV. Bottom Trace: Capacitor Voltage 1V/Div.RA = 3.9kΩRB = 3kΩC = 0.01μF
Figure 16. Astable Waveforms
8 Submit Documentation Feedback Copyright © 2000–2013, Texas Instruments Incorporated
Product Folder Links: LM555

LM555
www.ti.com SNAS548C –FEBRUARY 2000–REVISED MARCH 2013
The charge time (output high) is given by:t1 = 0.693 (RA + RB) C (1)
And the discharge time (output low) by:t2 = 0.693 (RB) C (2)
Thus the total period is:T = t1 + t2 = 0.693 (RA +2RB) C (3)
The frequency of oscillation is:
(4)
Figure 17 may be used for quick determination of these RC values.
The duty cycle is:
(5)
Figure 17. Free Running Frequency
FREQUENCY DIVIDER
The monostable circuit of Figure 12 can be used as a frequency divider by adjusting the length of the timingcycle. Figure 18 shows the waveforms generated in a divide by three circuit.
VCC = 5V Top Trace: Input 4V/Div.TIME = 20μs/DIV. Middle Trace: Output 2V/Div.RA = 9.1kΩ Bottom Trace: Capacitor 2V/Div.C = 0.01μF
Figure 18. Frequency Divider
PULSE WIDTH MODULATOR
When the timer is connected in the monostable mode and triggered with a continuous pulse train, the outputpulse width can be modulated by a signal applied to pin 5. Figure 19 shows the circuit, and in Figure 20 aresome waveform examples.
Copyright © 2000–2013, Texas Instruments Incorporated Submit Documentation Feedback 9
Product Folder Links: LM555

IE0408 - Laboratorio Eléctrico II Reporte 2
9.3. Anexo C. Hoja del frabricante CD4047
Escuela de Ingeniería Eléctrica 60 de 69 Universidad de Costa Rica

Absolute Maximum Ratings (Notes 1 and 2)
If Military/Aerospace specified devices are required,
please contact the National Semiconductor Sales
Office/Distributors for availability and specifications.
DC Supply Voltage (VDD) b0.5V to a18VDC
Input Voltage (VIN) b0.5V to VDD a0.5VDC
Storage Temperature Range (TS) b65§C to a150§CPower Dissipation (PD)
Dual-In-Line 700 mW
Small Outline 500 mW
Lead Temperature (TL)
(Soldering, 10 seconds) 260§C
Recommended OperatingConditions (Note 2)
DC Supply Voltage (VDD) 3V to 15VDC
Input Voltage (VIN) 0 to VDD VDC
Operating Temperature Range (TA)
CD4047BM b55§C to a125§CCD4047BC b40§C to a85§C
DC Electrical Characteristics CD4047BM (Note 2)
Symbol Parameter Conditionsb55§C 25§C 125§C
UnitsMin Max Min Typ Max Min Max
IDD Quiescent Device Current VDD e 5V 5 5 150 mA
VDD e 10V 10 10 300 mA
VDD e 15V 20 20 600 mA
VOL Low Level Output Voltage lIOl k 1 mA
VDD e 5V 0.05 0 0.05 0.05 V
VDD e 10V 0.05 0 0.05 0.05 V
VDD e 15V 0.05 0 0.05 0.05 V
VOH High Level Output Voltage lIOl k 1 mA
VDD e 5V 4.95 4.95 5 4.95 V
VDD e 10V 9.95 9.95 10 9.95 V
VDD e 15V 14.95 14.95 15 14.95 V
VIL Low Level Input Voltage VDD e 5V, VO e 0.5V or 4.5V 1.5 2.25 1.5 1.5 V
VDD e 10V, VO e 1V or 9V 3.0 4.5 3.0 3.0 V
VDD e 15V, VO e 1.5V or 13.5V 4.0 6.75 4.0 4.0 V
VIH High Level Input Voltage VDD e 5V, VO e 0.5V or 4.5V 3.5 3.5 2.75 3.5 V
VDD e 10V, VO e 1V or 9V 7.0 7.0 5.5 7.0 V
VDD e 15V, VO e 1.5V or 13.5V 11.0 11.0 8.25 11.0 V
IOL Low Level Output Current VDD e 5V, VO e 0.4V 0.64 0.51 0.88 0.36 mA
(Note 3) VDD e 10V, VO e 0.5V 1.6 1.3 2.25 0.9 mA
VDD e 15V, VO e 1.5V 4.2 3.4 8.8 2.4 mA
IOH High Level Output Current VDD e 5V, VO e 4.6V b0.64 b0.51 b0.88 b0.36 mA
(Note 3) VDD e 10V, VO e 9.5V b1.6 b1.3 b2.25 b0.9 mA
VDD e 15V, VO e 13.5V b4.2 b3.4 b8.8 b2.4 mA
IIN Input Current VDD e 15V, VIN e 0V b0.1 b10b5 b0.1 b1.0 mA
VDD e 15V, VIN e 15V 0.1 10b5 0.1 1.0 mA
DC Electrical Characteristics CD4047BC (Note 2)
Symbol Parameter Conditionsb40§C 25§C 85§C
UnitsMin Max Min Typ Max Min Max
IDD Quiescent Device Current VDD e 5V 20 20 150 mA
VDD e 10V 40 40 300 mA
VDD e 15V 80 80 600 mA
VOL Low Level Output Voltage lIOl k 1 mA
VDD e 5V 0.05 0 0.05 0.05 V
VDD e 10V 0.05 0 0.05 0.05 V
VDD e 15V 0.05 0 0.05 0.05 V
VOH High Level Output Voltage lIOl k 1 mA
VDD e 5V 4.95 4.95 5 4.95 V
VDD e 10V 9.95 9.95 10 9.95 V
VDD e 15V 14.95 14.95 15 14.95 V
2

Logic Diagram
TL/F/5969–3
*Special input protection circuit to permit larger input-voltage swings.
Truth Table
Terminal ConnectionsOutput Pulse
Typical Output
FunctionTo VDD To VSS
Input Pulse FromPeriod or
ToPulse Width
Astable Multivibrator
Free-Running 4, 5, 6, 14 7, 8, 9, 12 10, 11, 13 tA (10, 11) e 4.40 RC
True Gating 4, 6, 14 7, 8, 9, 12 5 10, 11, 13tA (13) e 2.20 RC
Complement Gating 6, 14 5, 7, 8, 9, 12 4 10, 11, 13
Monostable Multivibrator
Positive-Edge Trigger 4, 14 5, 6, 7, 9, 12 8 10, 11
Negative-Edge Trigger 4, 8, 14 5, 7, 9, 12 6 10, 11 tM (10, 11) e 2.48 RC
Retriggerable 4, 14 5, 6, 7, 9 8, 12 10, 11
External Countdown*14 5, 6, 7, 8, 9, 12 (See Figure) (See Figure) (See Figure)
Note: External resistor between terminals 2 and 3. External capacitor between terminals 1 and 3.
*Typical Implementation of External Countdown Option
TL/F/5969–4
tEXT e (N b 1) tA a (tM a tA/2)
4

IE0408 - Laboratorio Eléctrico II Reporte 2
9.4. Anexo D. Prereporte suministrado por el profesor Cascante
Escuela de Ingeniería Eléctrica 63 de 69 Universidad de Costa Rica

Universidad de Costa RicaFacultad de IngenieríaEscuela de Ingeniería EléctricaLABORATORIO ELÉCTRICO II________________________________________________________________________________________________________
EXPERIMENTO #2OSCILADORES, MULTIVIBRADORES Y FILTROS
Objetivos
• Estudiar el funcionamiento básico de un circuito oscilador y multivibrador.• Diseñar dispositivos de generación de frecuencias para aplicaciones prácticas.• Diseñar un filtro analógico utilizando las técnicas aprendidas en el curso de Electrónica II. • Verificar, experimentalmente, la respuesta en frecuencia del sistema diseñado.
Nota teórica 1
Osciladores
Consideremos un sistema realimentado y su función de transferencia de lazo cerrado:
Figura N°1. Sistema realimentado
FTLC s =y s r s
=GC s ⋅GP s
1+GC s ⋅GP s ⋅H s (1)
La estabilidad del sistema depende de las raíces del polinomio o ecuación característica. Si todas sus raíces tienen parte real negativa el sistema es estable. Si al menos una raíz tiene parte real positiva el sistema es inestable. Si existen raíces situadas sobre el eje imaginario, es decir que tienen parte real igual a cero, el sistema es oscilatorio. Por esto se dice que los osciladores son generadores de onda senoidal.
Figura N°2. Polos críticos
1 Fuente: Investigación de Pablo A. Leiva Calvo1

A partir de la ecuación característica, dependiendo del orden del sistema, se puede hallar una ecuación de la forma:
1+GC s ⋅GP s ⋅H s =0 (2)
a0⋅s n +a1⋅sn−1 +a2⋅sn−2⋯+an−1⋅s+an=0 (3)
Un par de raíces conjugadas localizadas sobre el eje imaginario en ±j0 indica que el circuito oscila a la frecuencia 0. Hacemos s = j0, y se agrupan los términos de la ecuación anterior para obtener una expresión de la forma a + j ∙b = 0. De aquí se obtienen dos ecuaciones (a=0 y b=0), de donde se encuentran la frecuencia de oscilación en términos de los parámetros a i y la condición de oscilación, la cual es la relación entre los ai que es esencial para que el circuito oscile.
Multivibradores
Existen muchas aplicaciones, sobre todo en circuitos digitales, donde es necesario un tren de pulsos de reloj, por ejemplo para sincronizar las operaciones del sistema. El tren de pulsos se genera mediante circuitos de temporización llamados multivibradores astables. A veces, para otras aplicaciones, se necesita un solo pulso que inicie en cierto momento y de una duración determinada. Estos pulsos son generados por multivibradores monoestables.
Un multivibrador monoestable sencillos, puede ser construido utilizando compuertas NOR:
Figura N°3. Multivibrador monoestable con NOR
Para iniciar el trabajo monoestable se aplica un pulso a la entrada Vi1. La duración del pulso de salida es:
T=RC⋅ln V R
V R−V T (4)
Un multivibrador astable puede también formarse utilizando compuertas NOR:
Figura N°4. Multivibrador astable con NOR
La frecuencia de este multivibrador astable se varía sabiendo que su período de oscilación, que continua indefinidamente es T = T1 + T2, donde T1 es el tiempo en bajo y T2 el tiempo en alto:
T 1 =RC⋅ln 2VC−V T
V C−VT T 2 =RC⋅lnV C +V T
V T (5)
Existen temporizadores mucho más complejos y precisos, como por ejemplo el integrado 555, y su funcionamiento básico utiliza la carga y descarga de capacitores, en forma similar a los temporizadores básicos descritos anteriormente.
2

El 555 permite temporización desde microsegundos hasta horas, así como modos de funcionamiento como monoestable y astable. Algunas otras aplicaciones son oscilador, divisor de frecuencia, modulador de frecuencia y generador de señales triangulares.
Para trabajar en modo monoestable se necesita únicamente una resistencia y un capacitor externo. Cuando la señal de disparo se encuentra en nivel alto, la salida se mantiene en bajo, el estado de reposo. Una vez que se produce el flanco descendente de la señal de disparo, la salida se activa un tiempo:
T=1 .1⋅RC (6)
Para el modo astable, se utilizan dos resitencias y un capacitor externo. Si se desea obtener una señal cuadrada, es decir con un ciclo de trabajo de 50%, se utilizan resistencias de igual valor y un diodo para lograr que la carga del capacitor se haga a través de una de ellas y la descarga a través de la otra. Con esto se logra un tiempo en alto igual al tiempo en bajo:
T= 0 . 69⋅RC (7)
Otro temporizador integrado muy utilizado es el CD4047, que puede operar también en modo monostable y astable, pero tan solo requiere una resistencia y un capacitor externo.
La operación como astable, de ciclo de trabajo de 50%, se activa o desactiva al poner en alto o bajo su patilla de control, y el disparo para el modo monoestable puede hacerse con un flanco positivo o negativo en su respectiva patilla. Además el CD4047 es redisparable, es decir que un disparo antes que termine el pulso de salida, prolonga la salida en estado alto un período más. Otras aplicaciones del 4047, además de circuitos temporizadores, son detección de envolventes, generador de señales triangulares y multiplicador / divisor de frecuencias.
Filtros
Una aplicación común de los AO es la construcción de filtros activos. Para realizar circuitos de filtros también se pueden utilizar elementos pasivos: resistencias y capacitores. Un filtro activo utiliza además un amplificador para proporcionar amplificación de voltaje y acoplamiento de señales.
Un filtro ideal pasabajas proporciona una salida desde dc hasta una frecuencia de corte fOH y luego no pasa señales por arriba de esa frecuencia.
Figura N°5. Diagrama en frecuencia de un filtro pasobajas
Un filtro que proporciona o pasa señales por arriba de una frecuencia de corte fOL es un filtro pasaaltas.
3

Figura N°6. Diagrama en frecuencia de un filtro pasoaltas
Se puede construir un filtro pasabanda usando dos etapas, la primera es un filtro pasaaltas y la segunda en filtro pasabajas. La operación combinada se convierte en la respuesta pasabanda deseada.
Figura N°7. Diagrama en frecuencia de un filtro pasabanda.
Cuestionario:
1. ¿Por qué un sistema electrónico puede llegar a oscilar?2. ¿Un oscilador presenta entradas? ¿Por qué si/no?3. ¿Qué diferencias existen entre el CD4047 y el LM555? ¿Qué fortalezas presentan uno con respecto al otro? Agrupe estas
fortalezas/debilidades en una tabla.4. Investigue un poco sobre el diseño de filtros. ¿Es lo mismo que un filtro procese una señal cuadrada que una senoidal pura?
(Recuerde Fourier).
4

I Parte: Osciladores
Diseño:
Para el siguiente circuito:
VEE
C2
U1BLF353
7
5
6
411
OUT
+
-
V+V-
U1ALF353
1
3
2
411
OUT
+
-
V+V-
R
VEE
C1
RVDD
0
R
RxVDD
0
Figura Nº8. Circuito oscilador (con LF353)
1. Determine las condiciones que debe cumplir C1 para que el circuito oscile, para Rx = 3R. Utilice el método de Van Valkenburg.
2. Calcule la frecuencia de oscilación natural del circuito.3. Simule el circuito de la Figura N°8; utilice OrCAD o programa similar. Compare la frecuencia simulada con la teórica
calculada.4. ¿Utilizaría un oscilador de este tipo para construir un generador de señales senoidales de frecuencia variable? Justifique su
respuesta.
Procedimiento:
1. Diseñe el oscilador en el laboratorio y verifique su funcionamiento. Capture las señales necesarias que ilustren el caso. Arme la configuración en una protoboard grande. TODAS la configuraciones serán ensambladas en una SOLA protoboard. Debe aprovechar muy bien el espacio de armado.
2. NO DESARME la configuración.
II Parte : Multivibradores.
Diseño:
1. Utilizando dos LM555 y todos los componentes periféricos que requiera, diseñe el dispositivo multivibrador que genere la salida mostrada en la Figura N°9.
2. Simule el circuito diseñado en el punto 1. ; utilice OrCAD o programa similar.3. Construya un generador de señales cuadradas de frecuencia variable entre 100 Hz a 10 kHz con un CD4047 y todos los
componentes periféricos que requiera.5

4. Verifique el funcionamiento del circuito diseñado el punto 3. con varias simulaciones (al menos 3) comparando los valores de frecuencia simulados con los teóricos definidos.
Figura Nº9. Dispositivo multivibrador.
Procedimiento:
1. Construya ambas configuraciones y compruebe su funcionamiento. Capture las señales necesarias que ilustren el caso. Ensamble la configuración en la misma protoboard en la que montó en el oscilador. Aproveche muy bien el espacio de armado.
2. NO DESARME la configuración.
III Parte: Filtros
Diseño:
1. Divida el ámbito de frecuencias de audio (0 a 15 kHz.) entre bandas: baja frecuencia (0 a 330 Hz), frecuencias medias (330 Hz a 3.3 kHz) y altas frecuencias (3.3 a 15 kHz). De acuerdo a los rangos de frecuencia diseñe un ecualizador de tres bandas (3 filtros de ganancia UNITARIA más un sumador NO inversor de ganancia ajustable), que garantice el mínimo rizado posible en la banda pasante (limite su diseño a filtros de orden menor a 4). Puede utilizar 3 filtros pasabanda o uno paso bajo + paso banda + paso alto.
2. Simule (con Matlab o similar, y Orcad o similar) cada una de las etapas por separado, y de ser posible las 4 etapas en grupo. Haciendo uso de una tabla, compare los rubros de diseño definidos con los obtenidos en las simulaciones.
Procedimiento: 1. Arme su ecualizador en la MISMA protoboard utilizada anteriormente.2. Pruebe su ecualizador con los generadores de las partes I y II del experimento. Capture diversas ondas de salida de acuerdo al
tipo de entrada. ¿Funciona como debe?, ¿hay algún incoveniente al utilizar los generadores de onda cuadrada?.3. Ajuste su ecualizador a una ganancia única para todo el intervalo de frecuencias.4. Realice un barrido en frecuencia para cada uno de los filtros.5. Pruebe su ecualizador con el generador de señales del laboratorio y haga un barrido en frecuencia para obtener una gráfica de
ganancia.6. Ilustre el concepto de Fourier utilizando una señal cuadrada como entrada. Para ello observe la salida (en el tiempo y en
frecuencia, utilice el osciloscopio y su módulo de Fourier) del ecualizador al tener a la entrada una señal de 2 Khz y cuatro condiciones de filtrado: 1. con los tres filtros activos, 2. con sólo el filtro pasobajos activo, 3. con sólo el filtro pasabanda activo y 4. con sólo el filtro pasoaltos activo. Es IMPORTANTE que la ganancia total de cada filtro sea semejante entre ellos a la hora de hacer las pruebas respectivas.
6