Programación visual desarrollo de aplicaciones
20
INSTITUTO TECNOLOGICO DE TEHUACAN OLMEDO ROMERO ALEJANDRO “DESARROLLO DE APLICACIONES” PROGRAMACION VISUAL
-
Upload
olmedo-axl -
Category
Software
-
view
54 -
download
1
Transcript of Programación visual desarrollo de aplicaciones
INSTITUTO TECNOLOGICO DE TEHUACAN
OLMEDO ROMERO ALEJANDRO
“DESARROLLO DE APLICACIONES”
PROGRAMACION VISUAL
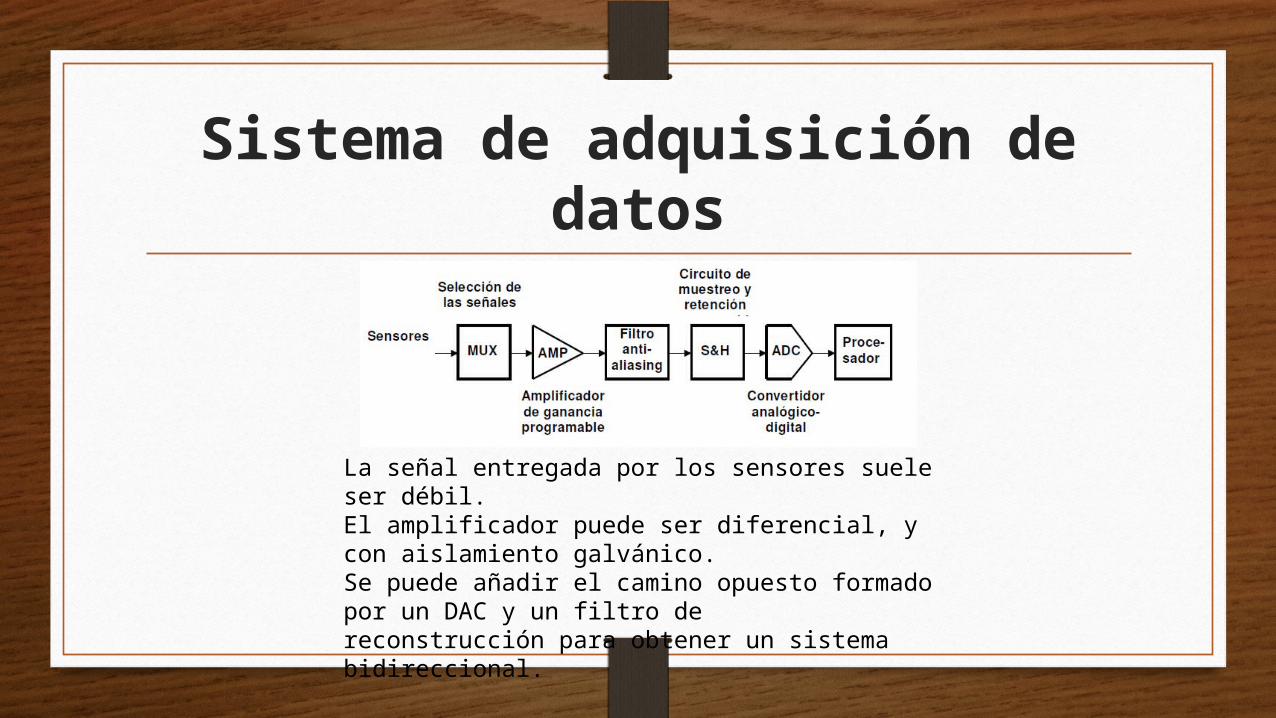
Sistema de adquisición de datos
La señal entregada por los sensores suele ser débil.El amplificador puede ser diferencial, y con aislamiento galvánico.Se puede añadir el camino opuesto formado por un DAC y un filtro dereconstrucción para obtener un sistema bidireccional.
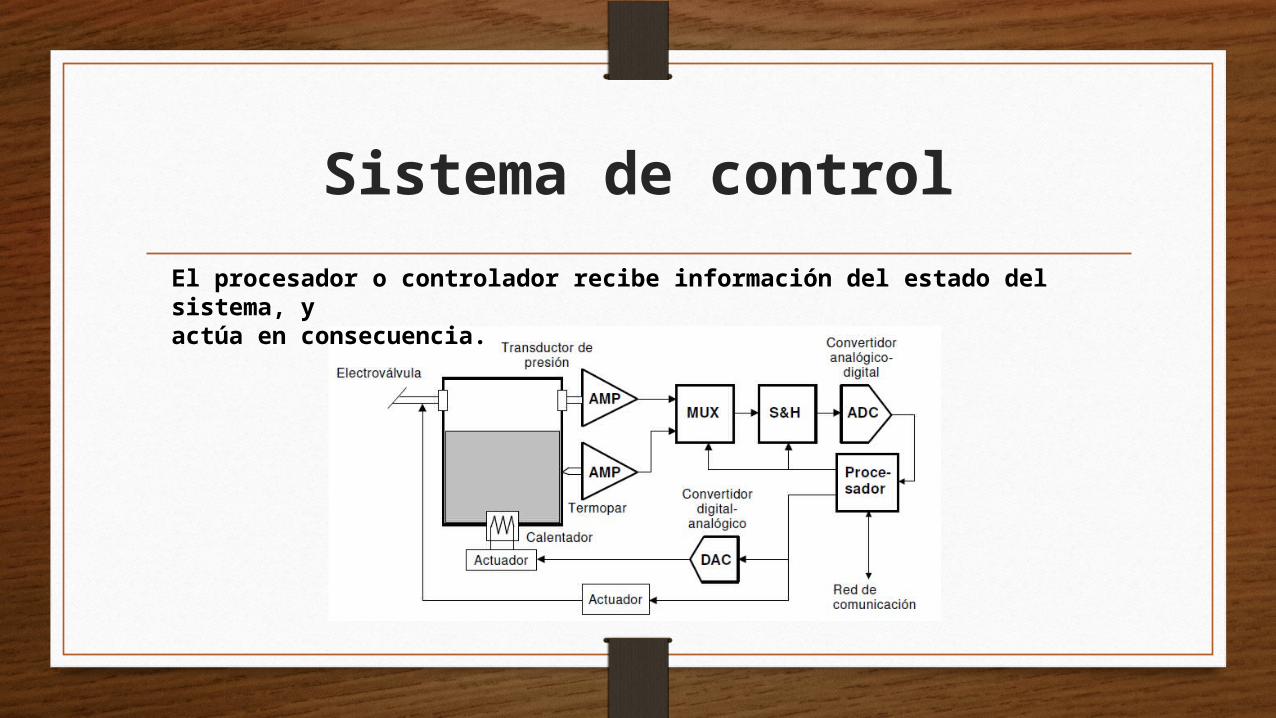
Sistema de control
El procesador o controlador recibe información del estado del sistema, yactúa en consecuencia.
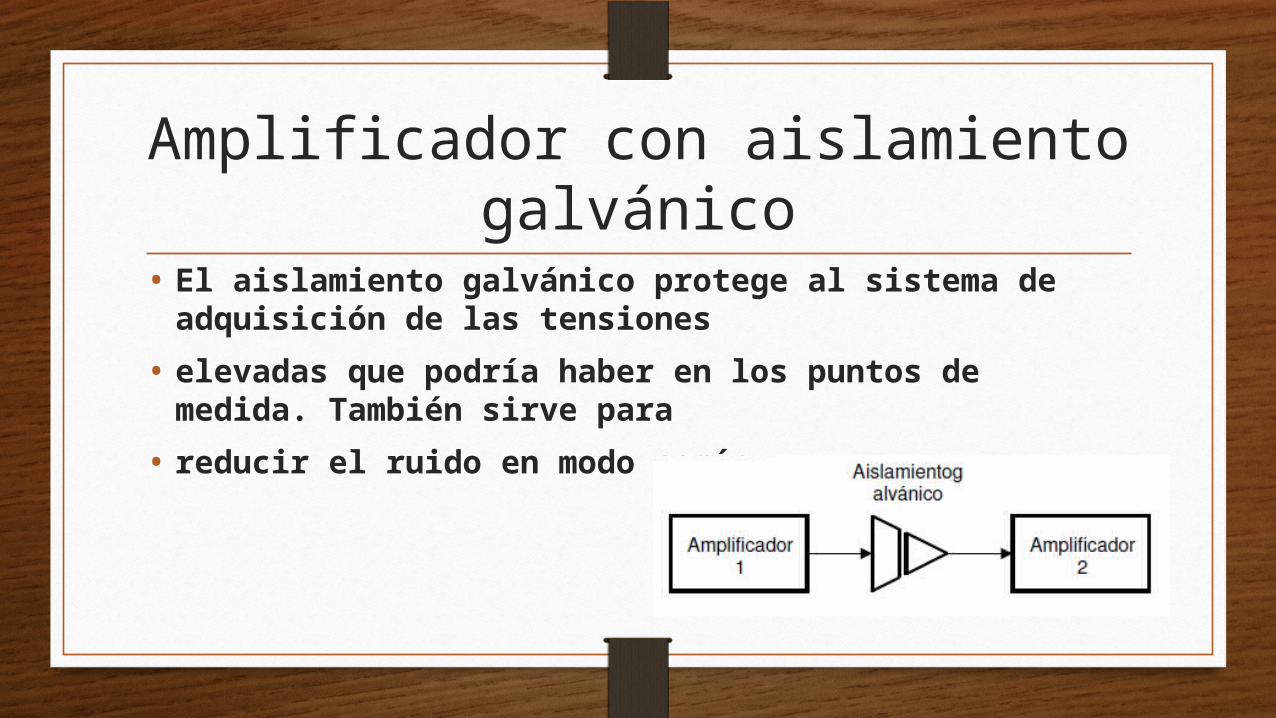
Amplificador con aislamiento galvánico
• El aislamiento galvánico protege al sistema de adquisición de las tensiones
• elevadas que podría haber en los puntos de medida. También sirve para
• reducir el ruido en modo común.
Métodos de acoplo empleados para obtener el paso de la señal sin conexión
eléctrica directa:
Acoplamiento inductivo (mediante transformador)Acoplamiento capacitivo (mediante condensador)Acoplamiento óptico (mediante IRLED y fotodiodo)
Cada amplificador (1 y 2) debe tener su propia masa y su alimentación (aisladasentre sí)
Ejemplo de aislamiento óptico
El IRED y los dos fotodiodos (FD1 y FD2)) forman parte de un único
encapsulado. El proceso de fabricación garantiza que la relación entre la
cantidad de luz que reciben FD1 y FD2 es prácticamente la misma para
cualquier corriente en el IRED dentro de un rango (diferencia < 0,1 %).
Sin embargo, la relación entre la corriente aplicada al IRED y la que se
genera en los fotodiodos es claramente alineal.
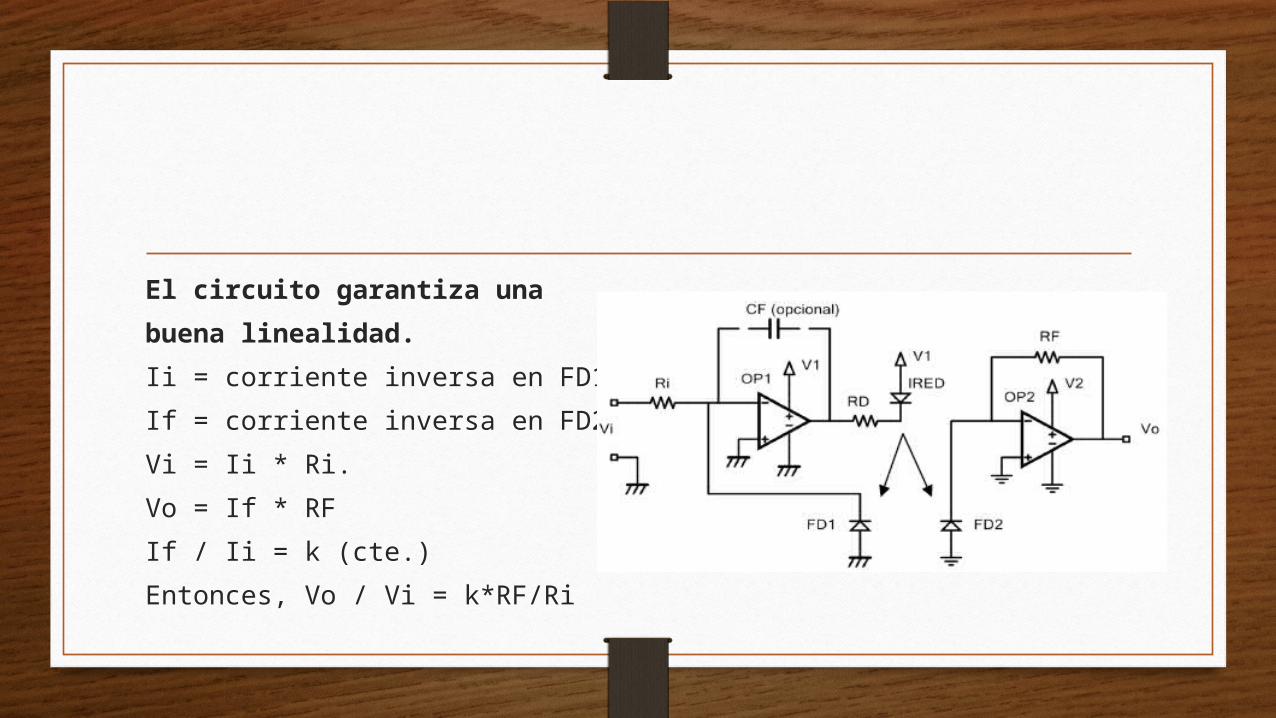
El circuito garantiza una
buena linealidad.
Ii = corriente inversa en FD1
If = corriente inversa en FD2
Vi = Ii * Ri.
Vo = If * RF
If / Ii = k (cte.)
Entonces, Vo / Vi = k*RF/Ri
Interruptores analógicos
Los interruptores analógicos son dispositivos con dos estados que permiten cerrar y
abrir un circuito eléctrico, facilitando de esta forma el control de paso de una señal.
El estado se define mediante una tensión de control. Idealmente, la resistencia en el
estado de conducción debería ser 0, y en el estado de no conducción debería ser
infinita. Estos dispositivos son útiles para el diseño de circuitos de muestreo y
retención (S&H), convertidores DAC y ADC, y en otras aplicaciones.
Los relés (relevadores electromagnéticos) se pueden utilizar como interruptores
analógicos. El tipo de relé más utilizado para esta aplicación es el rele reed, por su pequeño tamaño y su moderado consumo de corriente de control.
Sin embargo, su tiempo de conmutación (tc) es elevado (> 1 ms), y pueden presentar rebotes.
Ron < 0,1 W Roff > 1 TW
El relé reed está formado por una ampolla de vidrio rodeada por una bobina.
En el interior hay dos contactos metálicos (magnéticos) que se unen cuando
existe un campo magnético suficientemente intenso.
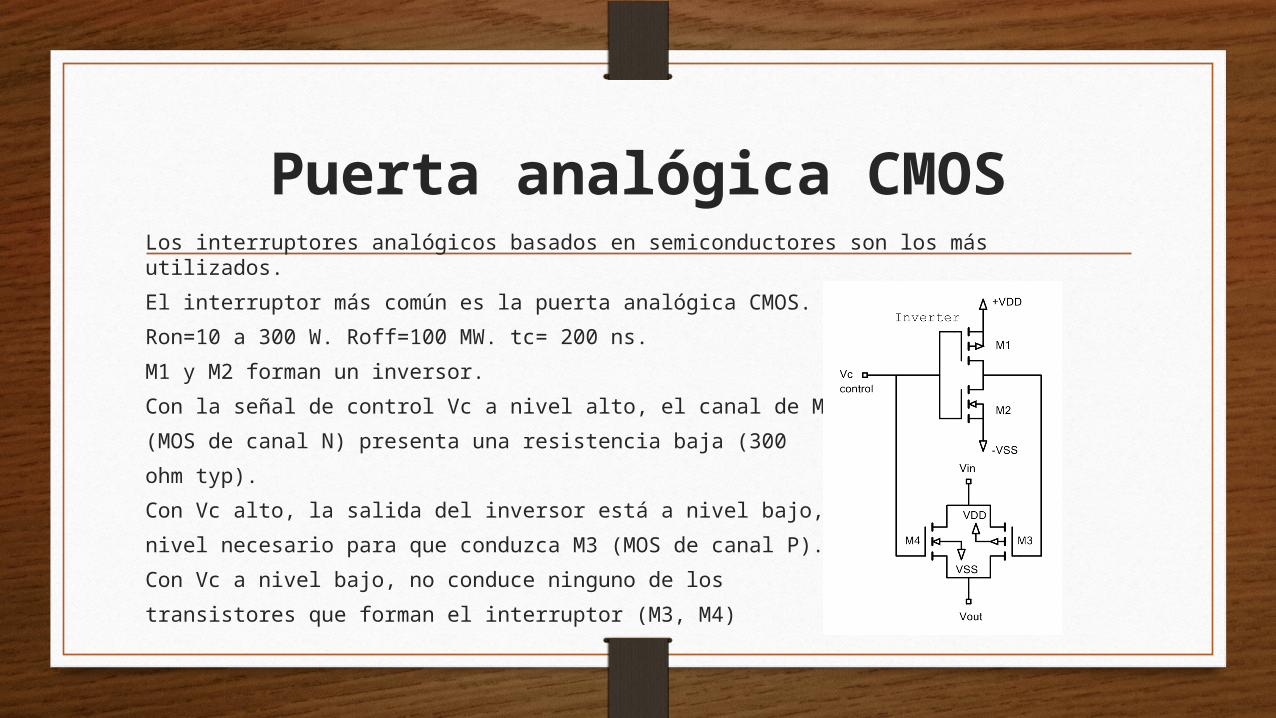
Puerta analógica CMOSLos interruptores analógicos basados en semiconductores son los más utilizados.
El interruptor más común es la puerta analógica CMOS.
Ron=10 a 300 W. Roff=100 MW. tc= 200 ns.
M1 y M2 forman un inversor.
Con la señal de control Vc a nivel alto, el canal de M4
(MOS de canal N) presenta una resistencia baja (300
ohm typ).
Con Vc alto, la salida del inversor está a nivel bajo, el
nivel necesario para que conduzca M3 (MOS de canal P).
Con Vc a nivel bajo, no conduce ninguno de los
transistores que forman el interruptor (M3, M4)
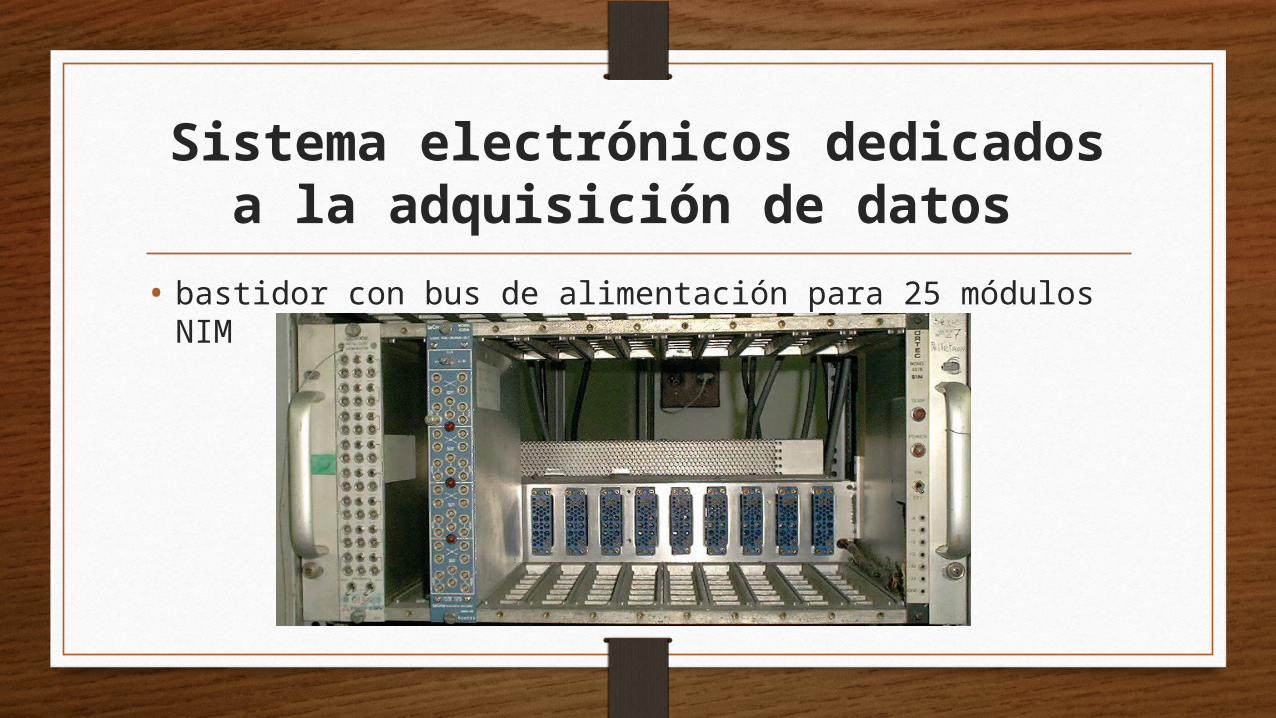
Sistema electrónicos dedicados a la adquisición de datos
• bastidor con bus de alimentación para 25 módulos NIM
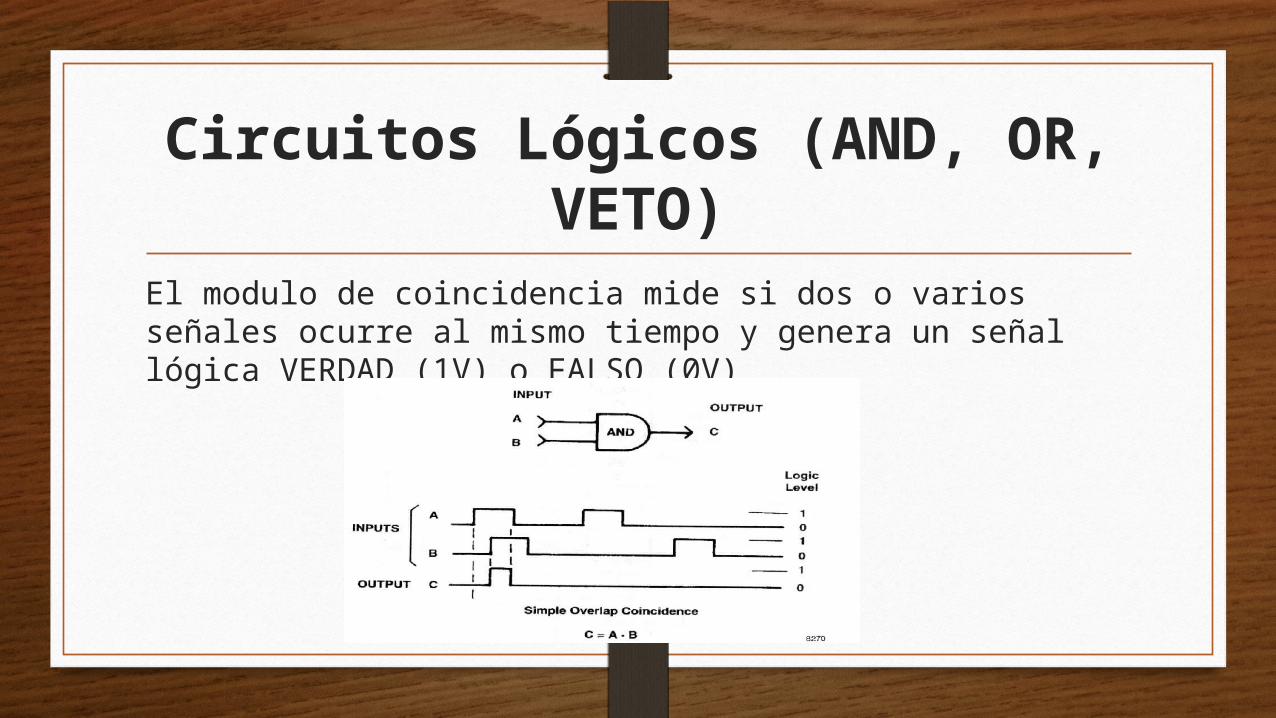
Circuitos Lógicos (AND, OR, VETO)
El modulo de coincidencia mide si dos o varios señales ocurre al mismo tiempo y genera un señal lógica VERDAD (1V) o FALSO (0V)

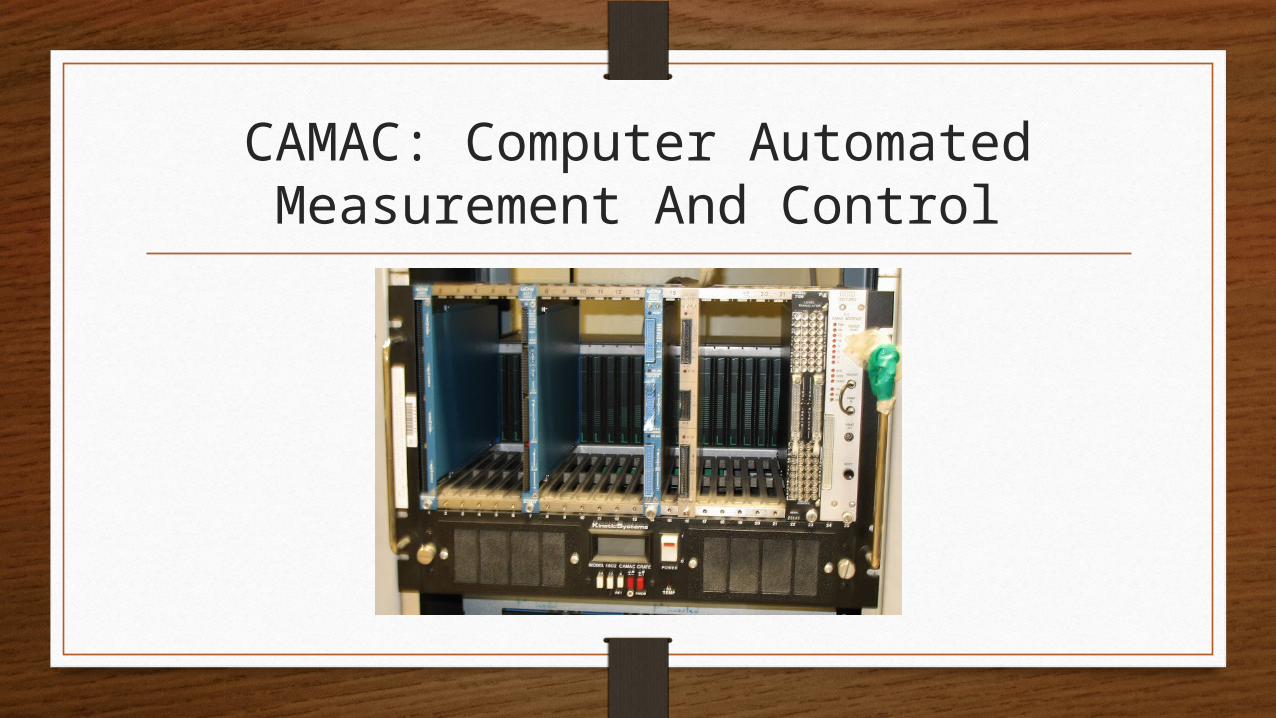
CAMAC: Computer Automated Measurement And Control
• CAMAC igual que NIM es un sistema modular pero el bastidor no sólo distribuye la alimentación para los módulos por el BACKPLANE (placa trasera del bastidor) es al mismo tiempo un bus de datos DATABUS, para que todos los módulos sean conectados con el controlador (CPU).
CAMAC es un estándar internacional de electrónico definido por el comité de
ESONE, (desarrolló originalmente en el CERN). Su función es de proporcionar
un esquema para permitir una gran variedad de módulos a comunicarse por un
backplane uniforme el DATAWAY.
– El bastidor tiene 25 posiciones
– posición 25 es reservado para el controlador
– La placa trasera lleva 86 pin sockets a todas las posiciones del bastidor.
– Por vía del bus se puede enviar comandos de CAMAC que incluye:
• station number a subaddress and a function (F)
• El modulo genera una repuesta acceptance (X)
• Hay comandos para leer un modulo READ y escribir a un modulo
WRITE line.
– El controlador puede ser mas o menos inteligente para que se puede usar
el sistema sola “standalone”, o conectada a un ordenador por vía de
ethernet .
– Data rate en el orden de 600 Kbytes/s
CAMAC: Computer Automated Measurement And Control
CONCEPTO DE ACTUADORES
Un ACTUADOR es un dispositivo inherentemente mecánico cuya función es proporcionar fuerza para mover o “actuar” otro dispositivo mecánico.
La fuerza que provoca el actuador proviene de tres fuentes posibles: Presión neumática, presión hidráulica, y fuerza motriz eléctrica (motor eléctrico o solenoide).
Dependiendo de el origen de la fuerza el actuador se denomina “neumático”, “hidráulico” o “eléctrico”.
Actualmente hay básicamente dos tipos de actuadores.
• Lineales
• Rotatorios
Los actuadores lineales generan una fuerza en línea recta, tal como haría un pistón.
Los actuadores rotatorios generan una fuerza rotatoria, como lo haría un motor eléctrico. En
este artículo nos concentraremos en los actuadores rotatorios. En la próxima actualización
tocaremos el tema de los actuadores lineales.
Como ya se mencionó, hay tres tipos de actuadores:
• Neumáticos
• Eléctricos
• Hidráulicos
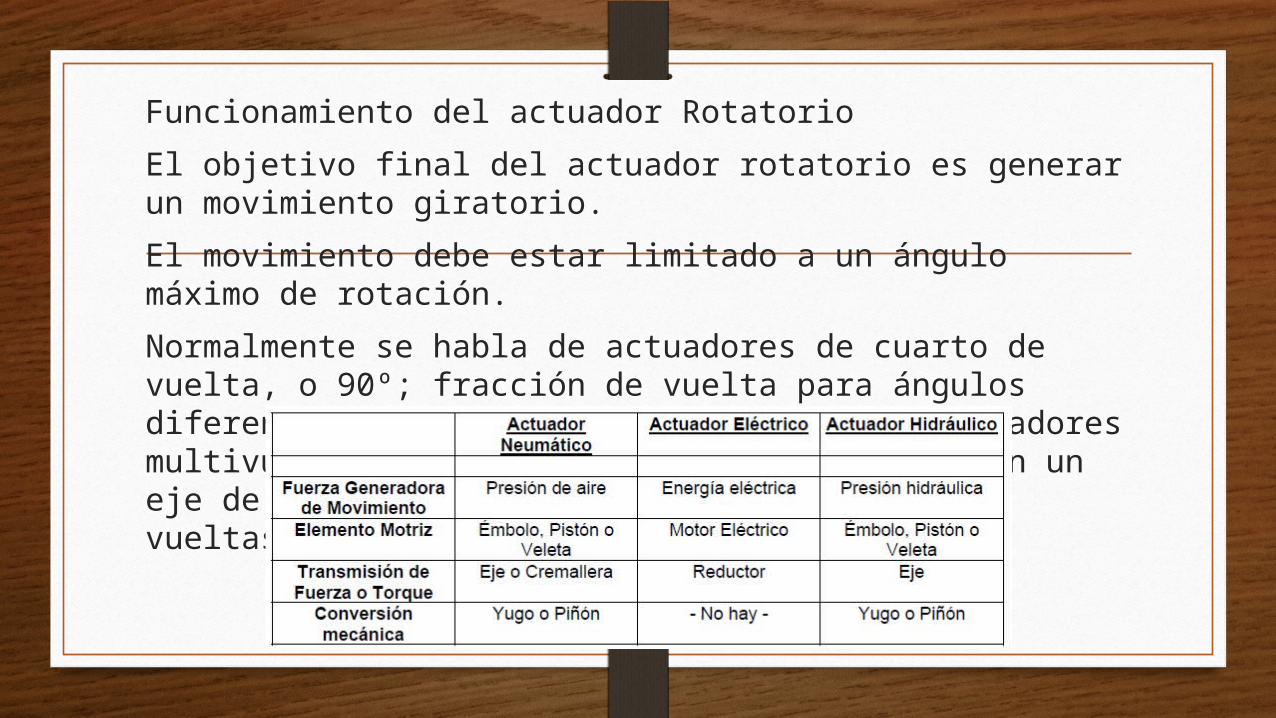
Funcionamiento del actuador Rotatorio
El objetivo final del actuador rotatorio es generar un movimiento giratorio.
El movimiento debe estar limitado a un ángulo máximo de rotación.
Normalmente se habla de actuadores de cuarto de vuelta, o 90º; fracción de vuelta para ángulos diferentes a 90º, por ejemplo 180º; y de actuadores multivuelta, para válvulas lineales que poseen un eje de tornillo o que requieren de múltiples vueltas para ser actuados.
REQUISITOS ALTERNATIVOS DE PROGRAMACION DE ACTUADORES
Actuadores Rotatorios con Posición de Falla
Hasta ahora hemos hablado de actuadores que se denominan de “doble efecto” o de
posición de falla “última posición”. A veces es conveniente que la válvula vuelva por sí
sola a una cierta posición si es que la energía falla. A estos actuadores se les denomina
de “simple efecto” o “Falla Cierre” o “Falla Abre”, FC o FA respectivamente (FC y FO en
inglés), o bien de “vuelta por resorte”.
Efectivamente, un resorte acumula energía para liberarla en la presencia de alguna falla,
o cuando se libere el actuador para que vuelva a su posición de falla.
Curvas de comportamiento de Torque
Todas las válvulas tienen un torque inherente a su porcentaje de apertura. Por ejemplo,
las válvulas mariposa de bajo rendimiento tienen su mas alto torque en la posición
cerrada, y si mínimo torque en la posición totalmente abierta.
Si se quiere tomar ventaja de esta particularidad, es importante hacer calzar los torques
de la válvula en sus diferentes posiciones, con los torques que es capaz de generar el
actuador, de otra forma puede terminar con un actuador que es el triple de lo que
realmente necesita.
En general se debe tener los puntos de torque de mas interés. Si una válvula se ha
asentado en su posición por largo tiempo, el torque requerido para sacarla de su posición
de reposo va a ser mas alto. Si se sospecha que la velocidad de flujo va a contribuir a una
variación de torque en la válvula, es algo que debe considerarse.