
Programación. Instrucciones básicas (I)
20
AUTÓMATAS PROGRAMABLES AUTÓMATAS PROGRAMABLES Programación básica • Contactos y marcas • Funciones AND / OR • Enclavamientos: KEEP, SET, RSET • Temporizadores y contadores (TIM / CNT) • Flancos (DIFU /DIFD) Roberto Álvarez Sindín (2011)
-
Upload
ead-cavanilles -
Category
Documents
-
view
227 -
download
2
description
Programación. Instrucciones básicas (I)
Transcript of Programación. Instrucciones básicas (I)

AUTÓMATAS PROGRAMABLESAUTÓMATAS PROGRAMABLESProgramación básica
• Contactos y marcas• Funciones AND / OR• Enclavamientos: KEEP, SET,
RSET• Temporizadores y contadores
(TIM / CNT)• Flancos (DIFU /DIFD)
Roberto Álvarez Sindín (2011)

Restricciones
Siempre especificar condición de entrada (usar P_on si es necesario)
No insertar entradas DESPUÉS de salidas
NO programar 2 veces la misma salida
Completar el diagrama
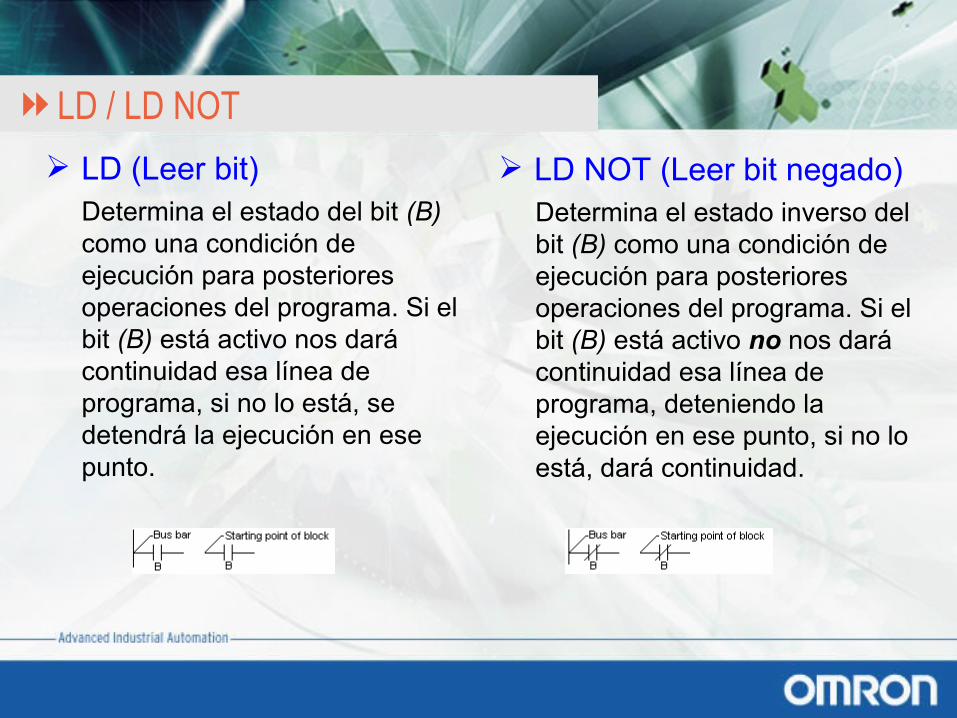
LD / LD NOT LD (Leer bit)
Determina el estado del bit (B) como una condición de ejecución para posteriores operaciones del programa. Si el bit (B) está activo nos dará continuidad esa línea de programa, si no lo está, se detendrá la ejecución en ese punto.
LD NOT (Leer bit negado)Determina el estado inverso del bit (B) como una condición de ejecución para posteriores operaciones del programa. Si el bit (B) está activo no nos dará continuidad esa línea de programa, deteniendo la ejecución en ese punto, si no lo está, dará continuidad.
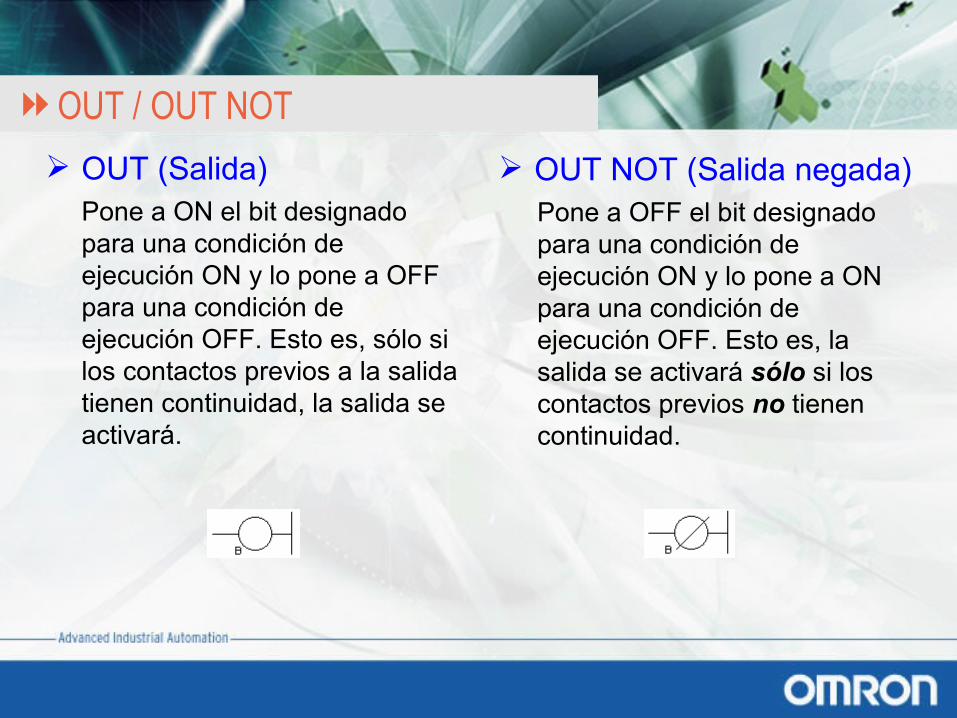
OUT / OUT NOT OUT (Salida)
Pone a ON el bit designado para una condición de ejecución ON y lo pone a OFF para una condición de ejecución OFF. Esto es, sólo si los contactos previos a la salida tienen continuidad, la salida se activará.
OUT NOT (Salida negada)Pone a OFF el bit designado para una condición de ejecución ON y lo pone a ON para una condición de ejecución OFF. Esto es, la salida se activará sólo si los contactos previos no tienen continuidad.
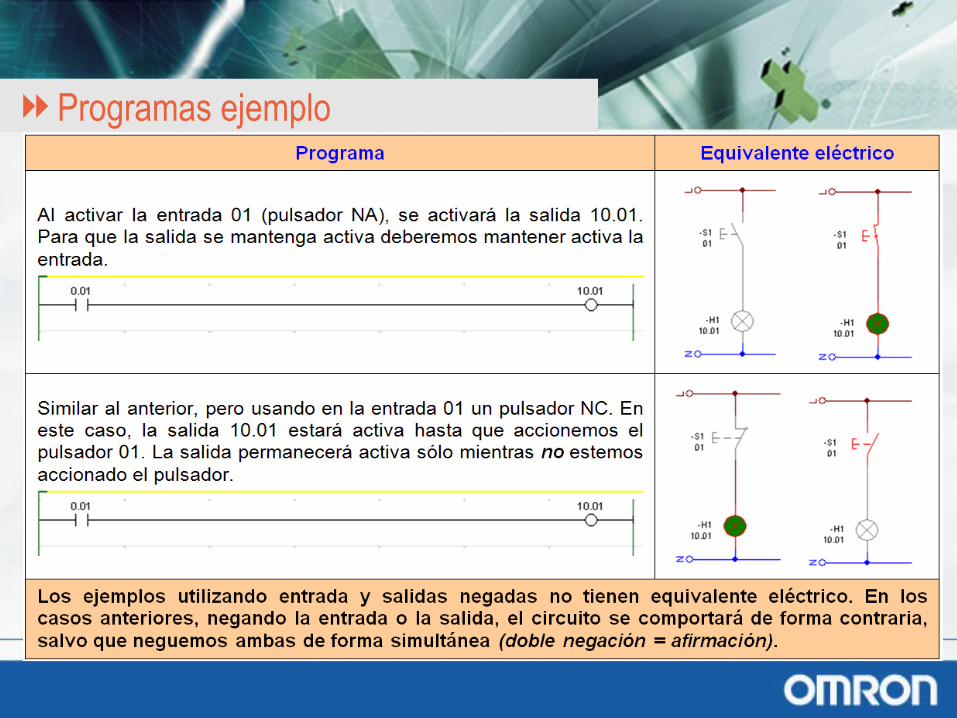
Programas ejemplo
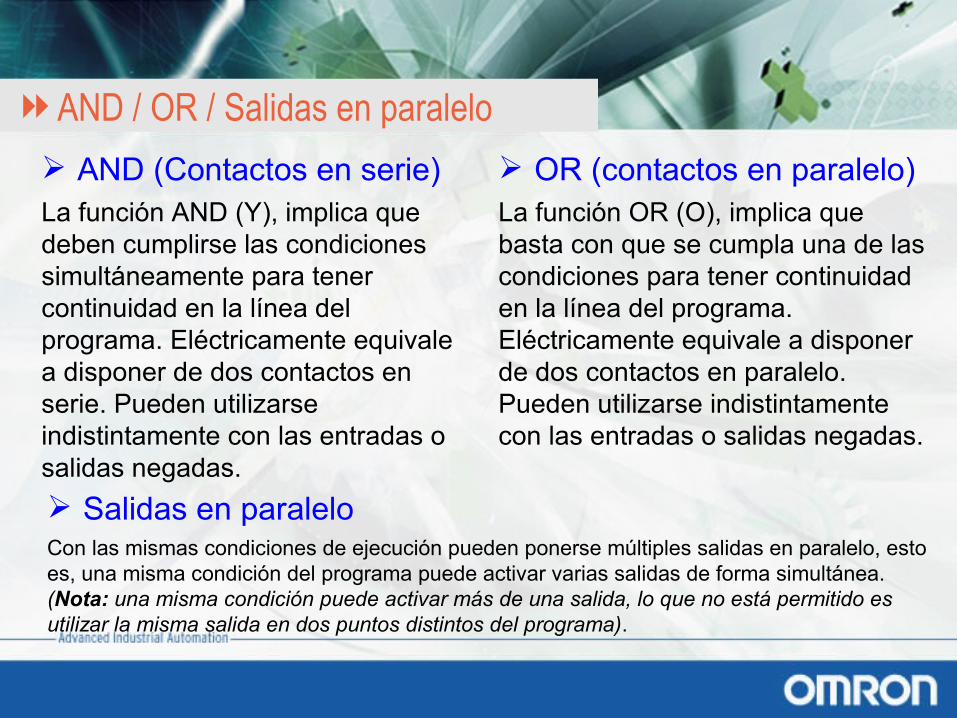
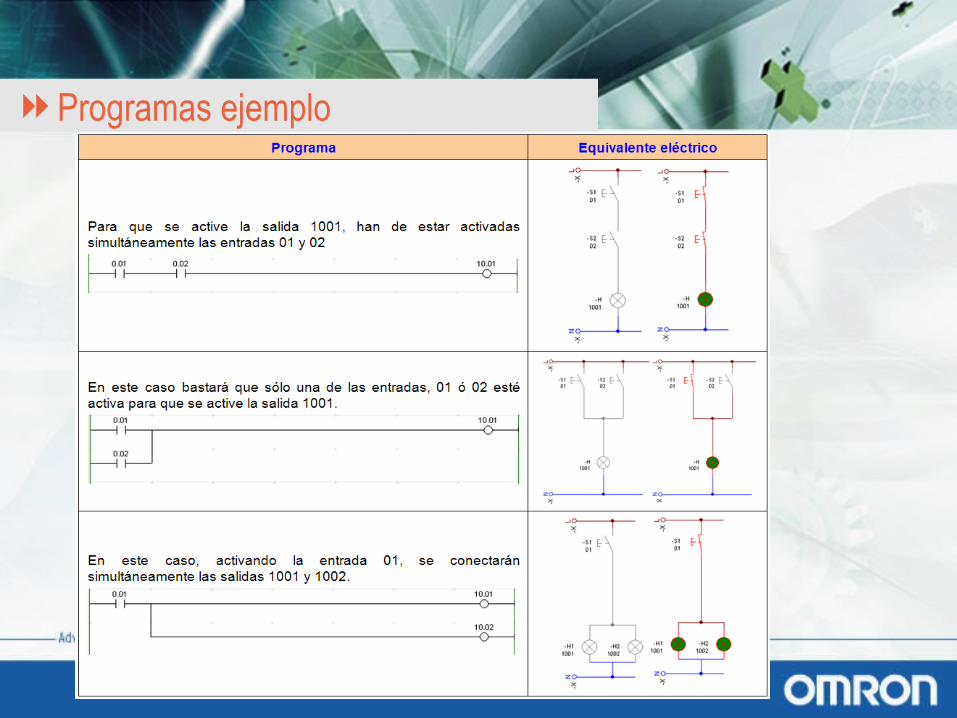
AND / OR / Salidas en paralelo AND (Contactos en serie)La función AND (Y), implica que deben cumplirse las condiciones simultáneamente para tener continuidad en la línea del programa. Eléctricamente equivale a disponer de dos contactos en serie. Pueden utilizarse indistintamente con las entradas o salidas negadas.
OR (contactos en paralelo)La función OR (O), implica que basta con que se cumpla una de las condiciones para tener continuidad en la línea del programa. Eléctricamente equivale a disponer de dos contactos en paralelo. Pueden utilizarse indistintamente con las entradas o salidas negadas.
Salidas en paraleloCon las mismas condiciones de ejecución pueden ponerse múltiples salidas en paralelo, esto es, una misma condición del programa puede activar varias salidas de forma simultánea. (Nota: una misma condición puede activar más de una salida, lo que no está permitido es utilizar la misma salida en dos puntos distintos del programa).
Programas ejemplo
Programas ejemplo
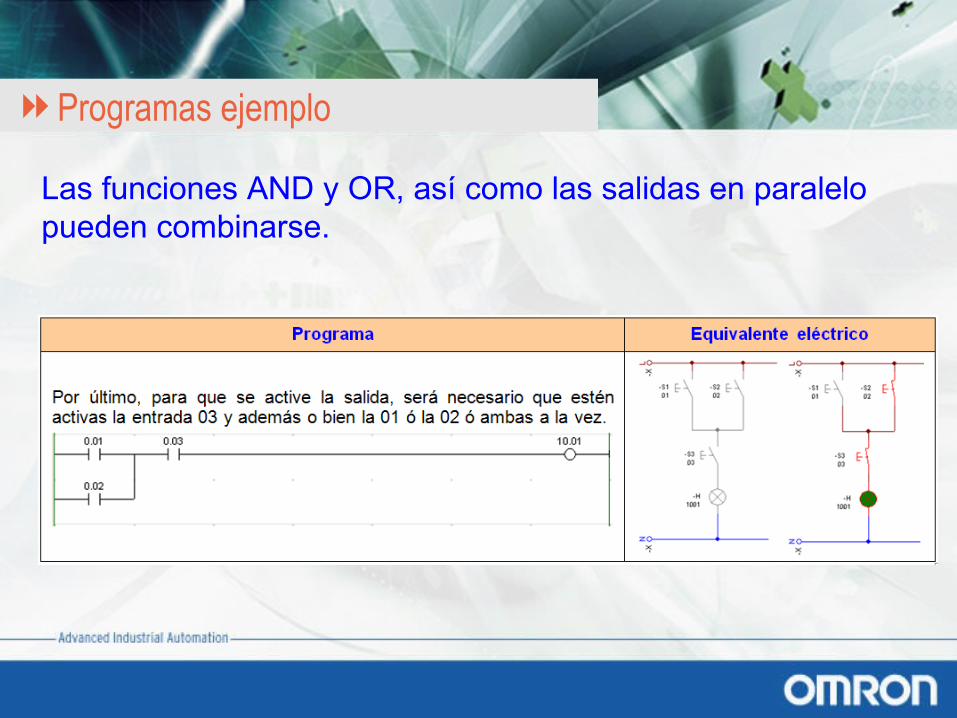
Las funciones AND y OR, así como las salidas en paralelo pueden combinarse.
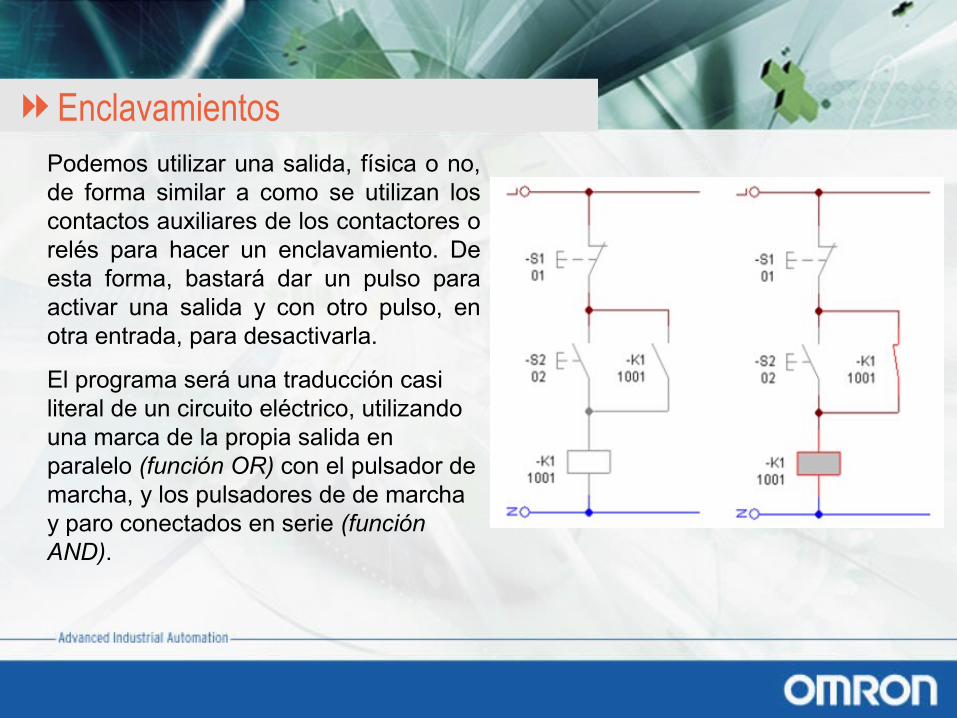
EnclavamientosPodemos utilizar una salida, física o no, de forma similar a como se utilizan los contactos auxiliares de los contactores o relés para hacer un enclavamiento. De esta forma, bastará dar un pulso para activar una salida y con otro pulso, en otra entrada, para desactivarla.
El programa será una traducción casi literal de un circuito eléctrico, utilizando una marca de la propia salida en paralelo (función OR) con el pulsador de marcha, y los pulsadores de de marcha y paro conectados en serie (función AND).

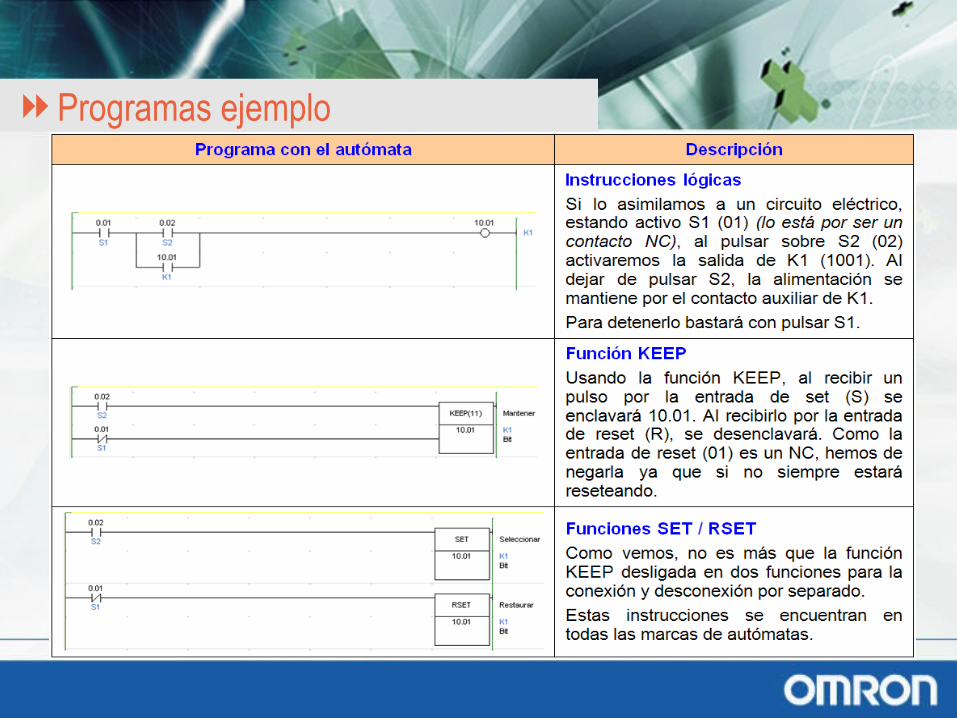
Enclavamientos: KEEP, SET/RSET KEEP (mantener)Esta función realiza el enclavamiento de un bit, activado por una entrada de set (S) y desactivado por una entrada de reset (R). Es equivalente al ejemplo anterior, pero resumido en una única función. En caso de recibir señales simultáneas por ambas entradas, siempre predomina el reset sobre el set.
SET y RSETSET: Pone el bit operando a ON
cuando la condición de ejecución es ON.
RSET: Pone el bit operando a OFF cuando la condición de ejecución es ON.
En caso de simultaneidad de señales a un mismo bit, siempre predominará el RSET sobre el SET.
Programas ejemplo
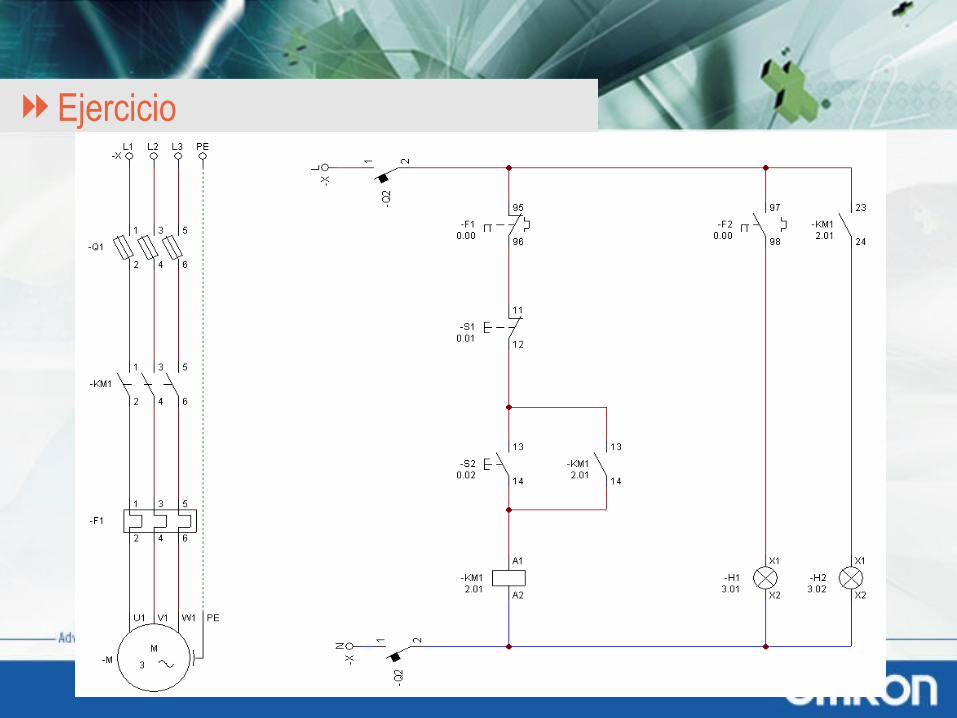
Ejercicio

Ejercicio (Solución)Traducción directa
Con función KEEP
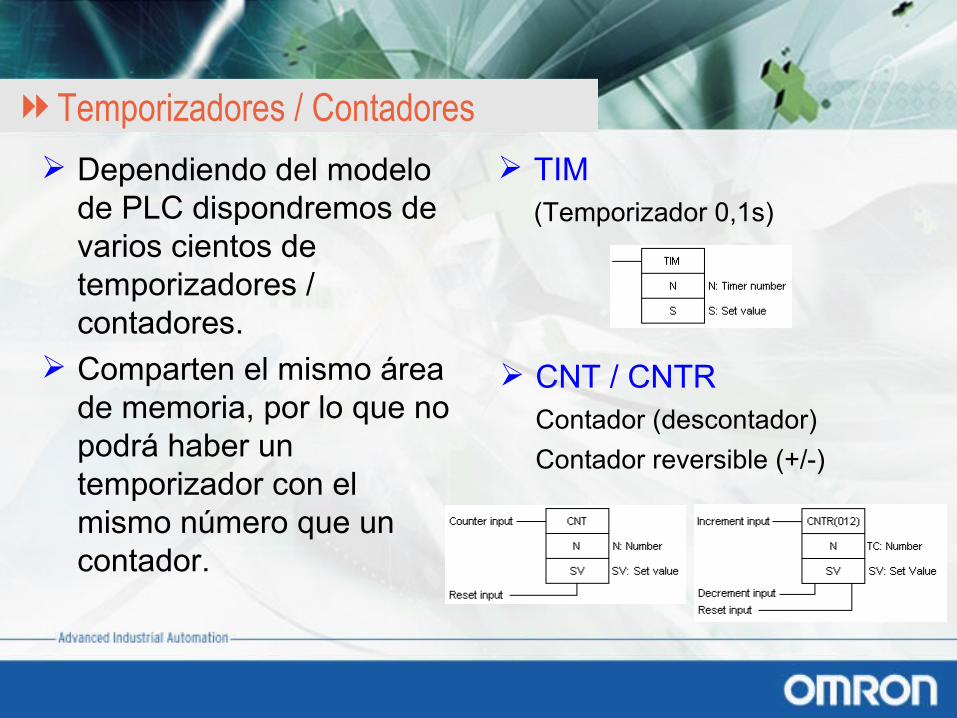
Temporizadores / Contadores Dependiendo del modelo
de PLC dispondremos de varios cientos de temporizadores / contadores.
Comparten el mismo área de memoria, por lo que no podrá haber un temporizador con el mismo número que un contador.
TIM (Temporizador 0,1s)
CNT / CNTR Contador (descontador)Contador reversible (+/-)

Ejemplos de aplicación
A los 5 s de estar activa la entrada 01 se activará la salida 2.01
Cuando se reciban 5 impulsos de 0.01, se activará la salida 2.01Reset con 0.00

Los flancos ponen a ON un bit durante un ciclo de scan (el tiempo que tarda en completarse el programa), cuando la condición de ejecución (los bits de entrada a la intrucción) pasan de OFF a ON (flanco ascendente DIFU(13)) o de ON a OFF (flanco descendente DIFD(14)). Se utilizan cuando queremos dar únicamente un pulso de señal, independientemente del tiempo que el bit de entrada esté activo.
Flancos: DIFU / DIFD
DIFU: Manda un pulso cuando la entrada pasa de OFF a ON
DIFD: Manda un pulso cuando la entrada pasa de ON a OFF
Una flecha o una barra nos indica si de un contacto estamos usando el flanco.En los CJ y en los nuevos CP no es necesario definir el flanco, se puede usar directamente
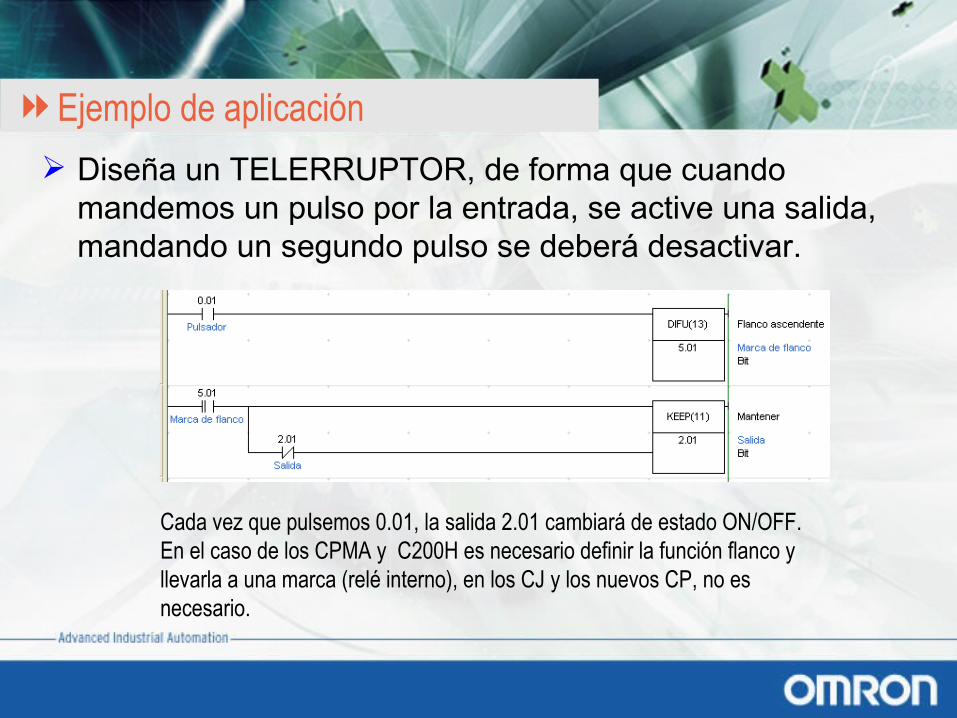
Diseña un TELERRUPTOR, de forma que cuando mandemos un pulso por la entrada, se active una salida, mandando un segundo pulso se deberá desactivar.
Ejemplo de aplicación
Cada vez que pulsemos 0.01, la salida 2.01 cambiará de estado ON/OFF.En el caso de los CPMA y C200H es necesario definir la función flanco y llevarla a una marca (relé interno), en los CJ y los nuevos CP, no es necesario.
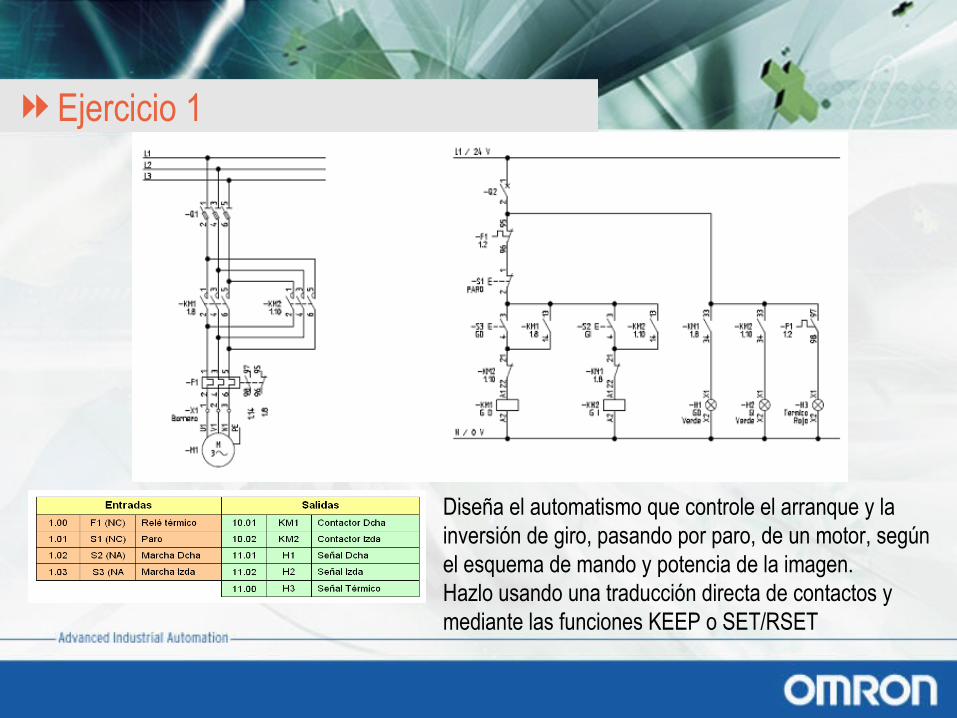
Ejercicio 1
Diseña el automatismo que controle el arranque y la inversión de giro, pasando por paro, de un motor, según el esquema de mando y potencia de la imagen.Hazlo usando una traducción directa de contactos y mediante las funciones KEEP o SET/RSET

Ejercicio 2
Diseña el automatismo que controle el arranque temporizado de dos motores, según el esquema de mando y potencia de la imagen.Al accionar el pulsador S2 se pondrá en marcha el motor M1. A los 10 segundos deberá ponerse en marcha el motor M2, deteniéndose el motor 1. La instalación podrá se detenida en cualquier momento pulsando el pulsador de paro S1.Hazlo usando una traducción directa de contactos y mediante las funciones KEEP o SET/RSET

Ejercicio 3Una plataforma movida por un motor trifásico debe trasportar una carga entre 2 posiciones. En la posición inicial, un pulsador acciona el motor y desplaza la plataforma hasta la segunda posición, donde un final de carrera la detiene. Pasado un tiempo (5 segundos), la plataforma regresa a su posición inicial de forma automática, el punto inicial queda establecido mediante otro final de carrera.
Señalización:
Avance de plataforma: piloto verdeRetorno de plataforma:piloto ámbar intermitente.Sobrecarga: piloto rojo.


















