Productos de robot de soldadura - sluzba.cz · que se produzcan como consecuencia del uso de este...
36
Descripción del sistema Productos de robot de soldadura IRC5
Transcript of Productos de robot de soldadura - sluzba.cz · que se produzcan como consecuencia del uso de este...

Descripción del sistemaProductos de robot de soldadura
IRC5


© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
Descripción del sistemaProductos de robot de soldadura
IRC5ID de documento: 3HAC031146-005
Revisión: -

© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
La información de este manual puede cambiar sin previo aviso y no puede entenderse como un compromiso por parte de ABB. ABB no se hace responsable de ningún error que pueda aparecer en este manual.Excepto en los casos en que se indica expresamente en este manual, ninguna parte del mismo debe entenderse como garantía alguna por parte de ABB por las pérdidas, lesiones, daños materiales, idoneidad para un fin determinado ni garantías similares.ABB no será en ningún caso responsable de los daños accidentales o consecuentes que se produzcan como consecuencia del uso de este manual o de los productos descritos en el mismo.Ni este manual ni ninguna de sus partes debe ser reproducido ni copiado sin la autorización por escrito de ABB ni su contenido debe ser entregado a terceras partes ni utilizarse para ningún fin no autorizado. Cualquier incumplimiento de esta norma será perseguido legalmente. Usted puede obtener copias adicionales de este manual a través de ABB, con el coste aplicable en el momento de su solicitud.
© Copyright 2008 ABB. Reservados todos los derechos.
ABB AB Robotics Products
SE-721 68 Västerås Suecia

Contenido©
Cop
yrig
ht 2
008
AB
B. R
eser
vado
s tod
os lo
s der
echo
s.
1: Generalidades 5
2: Sistema de robot de soldadura 7
3: Sistema de control adaptado para equipos periféricos 9
3.1: Sistema de control de robot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2: Sistema de control para equipos periféricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2.1 Ubicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.2.2 Diagrama de bloques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2.3 Conexiones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4: Robot con equipo de soldadura 19
4.1: Fuente de potencia de soldadura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204.2: Pistolas de soldadura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214.3: Unidades de servicio de pistola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.4: Sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5: Posicionador IRBP 23
5.1: Posicionador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6: Track de desplazamiento para el robot 27
6.1: Track de desplazamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7: Panel del operador 29
7.1: Comunicación del operador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297.2: Panel de control de trabajos manuales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
8: Equipos de seguridad 31
8.1: Funciones de seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3HAC031146-005 Revisión: - 3

Contenido
4

1 Generalidades©
Cop
yrig
ht 2
008
AB
B. R
eser
vado
s tod
os lo
s der
echo
s.
1: GeneralidadesEste documento describe la gama estándar de ABB en cuanto a sistemas de robot de soldadura al arco.
3HAC031146-005 Revisión: - 5

1 Generalidades
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
6 3HAC031146-005 Revisión: -

2 Sistema de robot de soldadura©
Cop
yrig
ht 2
008
AB
B. R
eser
vado
s tod
os lo
s der
echo
s.
2: Sistema de robot de soldaduraSuministro
El sistema de robot de soldadura se suministra en secciones en el caso de su configuración estándar. Todos los elementos incluidos en el suministro se montan en sus secciones correspondientes.
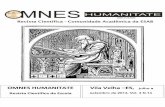
Ejemplo de sistema de robot individualLos componentes que pueden formar un sistema de robot de soldadura son, por ejemplo:
Figura 1: Estación de robot de soldadura completo con un robot
Elemento Descripción
1. Posicionador
2. Equipos de seguridad
3. Robot, alimentador de hilo, pistola de soldadura y paquete de mangueras
4. Fuente de potencia de soldadura
5. Armario de control
6. Panel del operador
7. Track de desplazamiento (no se muestra, consulte la Figure 19: on page 27)
Accesorios: unidad de refrigeración, unidad de limpieza de salpicaduras de soldadura, cortador de hilo, unidad de comprobación del TCP (Tool Center Point, punto central de la herramienta), detector de cordón y seguimiento de cordones
1
3 4
5
6
2
3HAC031146-005 Revisión: - 7

2 Sistema de robot de soldadura
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
8 3HAC031146-005 Revisión: -

3 Sistema de control adaptado para equipos periféricos3.1: Sistema de control de robot
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
3: Sistema de control adaptado para equipos periféricosDescripción
El sistema de control se utiliza para controlar los robots, el equipo de soldadura, los posicionadores y el resto de equipos periféricos.
El producto se ha diseñado para los tipos de robots siguientes:• IRB1600/2400L con configuración AW.
3.1: Sistema de control de robot
GeneralidadesEl sistema de control IRC5 está disponible en dos configuraciones: Single Cabinet Controller y Dual Cabinet Controller.
Figura 2: Single Cabinet Controller y Dual Cabinet Controller
Elemento Descripción
1. Single Cabinet Controller
2. Dual Cabinet Controller, Control Module
3. Dual Cabinet Controller, Drive Module
1
3
2
¡Atención!Existe un Drive Module por cada robot adicional que esté conectado al sistema (en el caso de un solo robot, sólo el Single Cabinet Controller o Dual Cabinet Controller).
3HAC031146-005 Revisión: - 9

3 Sistema de control adaptado para equipos periféricos3.1: Sistema de control de robot
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
Process Module
El Process Module está presente en el sistema en los casos siguientes:
Figura 3: Process Module
Descripción
1. Si el sistema cuenta con un sistema de seguimiento de cordones AWC
2. Si el cliente ha pedido un Process Module para disponer de espacio adicional
¡Atención!Los sistemas de control para robots se describen en el Manual del producto - Controlador de robot IRC5.Los sistemas de control de los equipos periféricos se describen en los documentos Manual del producto - Equipo de control de posicionador, Product manual - Process Interface y Manual del producto - Equipo de seguridad.
10 3HAC031146-005 Revisión: -

3 Sistema de control adaptado para equipos periféricos3.2: Sistema de control para equipos periféricos
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
3.2: Sistema de control para equipos periféricos
DescripciónEl sistema de control IRC5 se complementa con equipos de control para posicionadores, equipos de soldadura, equipos de seguridad y otros equipos periféricos.
Figura 4: Sistema de control para equipos periféricos
Pos. Descripción
1. Equipo de control de posicionador y procesos
2. Equipo de control de seguridad
2
1
3HAC031146-005 Revisión: - 11

3 Sistema de control adaptado para equipos periféricos3.2.1 Ubicación
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
3.2.1 Ubicación
Equipo de control de posicionadorEl equipo de control de posicionador está situado en el Single Cabinet Controller o el Dual Cabinet Controller.
Equipo de control de procesoEl equipo de control de proceso está situado dentro de la fuente de potencia de soldadura.
Consulte el manual de la fuente de potencia ESAB.
Equipo de control de seguridadEl equipo de control de seguridad está situado en la pared lateral del armario. El equipo de control también puede estar situado en la protección o en una pared fija del edificio.
Figura 5: Ubicación del equipo de control de posicionador
Figura 6: Ubicación del equipo de control de seguridad en el Single Cabinet Controller y el Dual Cabinet Controller
12 3HAC031146-005 Revisión: -

3 Sistema de control adaptado para equipos periféricos3.2.2 Diagrama de bloques
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
3.2.2 Diagrama de bloques
Diagrama de bloques del posicionador
Diagrama de bloques de proceso
Figura 7: Diagrama de bloques de posicionador
Figura 8: Diagrama de bloques de proceso
3HAC031146-005 Revisión: - 13

3 Sistema de control adaptado para equipos periféricos3.2.2 Diagrama de bloques
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
Diagrama de bloques del panel del operador y del movimiento manual
Diagrama de bloques de seguridad
Figura 9: Diagrama de bloques del panel del operador y del movimiento manual
Figura 10: Diagrama de bloques de seguridad
Elemento Descripción
1. Prerrestablecimiento
2. Restablecimiento de puerta
3. Interruptor de puerta
4. Barrera fotoeléctrica
321
4
14 3HAC031146-005 Revisión: -

3 Sistema de control adaptado para equipos periféricos3.2.3 Conexiones
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
3.2.3 Conexiones
Conexión de posicionador
A continuación se muestra el posicionador conectado al Single Cabinet Controller o el Drive Module conectado al Dual Cabinet Controller:
Posicionador 1
Posicionador 2
¡Atención!Los sistemas de control para posicionadores se describen en el Manual del producto - Equipo de control de posicionador.
Figura 11: Conexión de posicionador 1
Elemento Descripción
1. Posicionador 1
2. Tarjeta de medida serie para posicionador 1
1
2
Figura 12: Conexión de posicionador 2
Elemento Descripción
1. Posicionador 2
2. Tarjeta de medida serie para posicionador 2
1
2
3HAC031146-005 Revisión: - 15

3 Sistema de control adaptado para equipos periféricos3.2.3 Conexiones
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
Track de desplazamiento RTT
Conexión de proceso/seguridad
A continuación se muestran las ubicaciones de los casquillos de cables para el equipo de proceso y seguridad. Los cables se conectan a terminales o unidades del interior del armario de control.
Figura 13: Conexión de track de desplazamiento
Elemento Descripción
1. Track de desplazamiento RTT
2. Tarjeta de medida serie para track de desplazamiento RTT
1
2
¡Atención!El equipo de control de proceso se describe en el documento Product manual - Process Interface.
¡Atención!El equipo de control de seguridad se describe en el Manual del producto - Equipo de seguridad.
16 3HAC031146-005 Revisión: -

3 Sistema de control adaptado para equipos periféricos3.2.3 Conexiones
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
Single Cabinet Controller
Figura 14: Casquillos para proceso y seguridad en el Single Cabinet Controller
3HAC031146-005 Revisión: - 17

3 Sistema de control adaptado para equipos periféricos3.2.3 Conexiones
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
Dual Cabinet Controller
Figura 15: Casquillos para proceso y seguridad en el Dual Cabinet Controller
18 3HAC031146-005 Revisión: -

4 Robot con equipo de soldadura©
Cop
yrig
ht 2
008
AB
B. R
eser
vado
s tod
os lo
s der
echo
s.
4: Robot con equipo de soldaduraSoldadura al arco
En los sistemas de robot de soldadura al arco se utiliza normalmente un robot IRB1600 o IRB2400L. En algunos sistemas, pueden incluirse otros modelos, por ejemplo robots de soldadura, manipulación o mecanización.
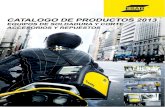
En los sistemas de soldadura al arco, el robot incorpora equipo de soldadura compuesto por las unidades siguientes:
Ejemplo
Figura 18: IRB 1600 con equipo de soldadura
Elemento Descripción
A Fuente de potencia de soldadura AristoMig
B Hilo MarathonPac
C Unidad de alimentación de hilo Aristo RoboFeed
D Pistola Binzel
E Centro de servicio de pistola TSC
3HAC031146-005 Revisión - 21

4 Robot con equipo de soldadura4.1: Fuente de potencia de soldadura
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
4.1: Fuente de potencia de soldaduraEstán disponibles las alternativas estándar siguientes en cuanto a la fuente de potencia:
Descripción Figura
ESAB AristoMig 4000iESAB AristoMig 4000iwESAB AristoMig 5000iESAB AristoMig 5000iw
22 3HAC031146-005 Revisión -

4 Robot con equipo de soldadura4.2: Pistolas de soldadura
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
4.2: Pistolas de soldaduraEstán disponibles las alternativas estándar siguientes en cuanto a las pistolas de soldadura:
Descripción Figura
IRB 1600ID:Binzel ISTM ABIROB A500 22°
IRB 1600/2400:Binzel ABIROB A500 22°
IRB 1600ID:Binzel ISTM ABIROB W500 22°
IRB 1600/2400:Binzel ABIROB W500 22°
3HAC031146-005 Revisión - 23

4 Robot con equipo de soldadura4.3: Unidades de servicio de pistola
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
4.3: Unidades de servicio de pistolaEstán disponibles las alternativas estándar siguientes en cuanto a las unidades de servicio de pistolas:
4.4: SensoresEstán disponibles las alternativas estándar siguientes en cuanto a los sensores:
Descripción Figura
Centro de servicio de pistolas TSC basado en el TC96/compuesto de:
1. Limpiador de pistola
2. Cortador de hilo
3. Unidad de calibración de TCP
• Es posible adquirir sus distintas partes como componentes individuales.
2
3
1
Descripción
Detector de cordón
• SmarTac• Detección de contacto (sólo para los equipos de soldadura Fronius)Seguimiento de cordón
• AWC
24 3HAC031146-005 Revisión -

5 Posicionador IRBP5.1: Posicionador
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
5: Posicionador IRBP5.1: Posicionador
DescripciónLos posicionadores se utilizan para posicionar las piezas de trabajo de forma óptima para las uniones de soldadura y los robots. El posicionador IRBP está equipado con motores de CA sin mantenimiento y dotados de frenos electromagnéticos.
• El número del nombre del posicionador indica su capacidad de manejo máxima.
• La letra del nombre del posicionador indica el tipo de posicionador.
Están disponibles las alternativas estándar siguientes en cuanto a los tipos de posicionadores:
Descripción Figura
IRBP 500/1000C
IRBP 250/500C Index
3HAC031146-005 Revisión - 25

5 Posicionador IRBP5.1: Posicionador
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
IRBP 250/500/750/2000/5000L
IRBP 250/500/750K
IRBP 250/500/750R
Descripción Figura
26 3HAC031146-005 Revisión -

5 Posicionador IRBP5.1: Posicionador
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
IRBP 250/500/750A
IRBP 250/500/750B
IRBP 250/ 500D
Descripción Figura
3HAC031146-005 Revisión - 27

5 Posicionador IRBP5.1: Posicionador
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
28 3HAC031146-005 Revisión -

6 Track de desplazamiento para el robot6.1: Track de desplazamiento
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
6: Track de desplazamiento para el robot6.1: Track de desplazamiento
DescripciónEl track de desplazamiento se utiliza para posicionar un robot en estaciones de trabajo diferentes o dentro de un área de trabajo amplia.
Figura 19: Track de desplazamiento
Descripción
Track de desplazamiento Marathon o Bobin de 3,7 m
Longitud de recorrido
1,7 m 7,7 m
2,7 m 8,7 m
3,7 m 9,7 m
4,7 m 10,7 m
5,7 m 11,7 m
6,7 m
3HAC031146-005 Revisión - 29

6 Track de desplazamiento para el robot6.1: Track de desplazamiento
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
30 3HAC031146-005 Revisión -

7 Panel del operador7.1: Comunicación del operador
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
7: Panel del operador7.1: Comunicación del operador
Existe un panel del operador con distintas funciones con pulsadores, para permitir al operador comunicarse con el sistema de robot de soldadura al arco. Están disponibles las alternativas estándar siguientes en cuanto a paneles del operador:
Descripción Figura
Panel del operador para un área de trabajo
Panel del operador para dos áreas de trabajo
3HAC031146-005 Revisión - 31

7 Panel del operador7.2: Panel de control de trabajos manuales
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
7.2: Panel de control de trabajos manualesExiste un panel de control con dos funciones con pulsadores (+/-) y una unidad de retención para que el operador pueda controlar manualmente el posicionador. El panel de control se utiliza para conseguir una posición ergonómicamente correcta para la carga y descarga de posicionador.
Descripción Figura
Movimiento manual del posicionador:K/R/L.
32 3HAC031146-005 Revisión -

8 Equipos de seguridad8.1: Funciones de seguridad
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
8: Equipos de seguridadPara que el personal pueda trabajar de forma segura con un sistema de robot de soldadura al arco, el sistema debe contar con distintos componentes de seguridad que se integran en el sistema de seguridad del armario de control.
8.1: Funciones de seguridad
Funciones de seguridad
Supervisión del área de trabajo con barreras fotoeléctricas
Unidad de prerrestablecimiento de las barreras fotoeléctricas
Indicación de área de trabajo para:
• Robot o track de desplazamiento• PosicionadorSupervisión de puerta
Unidad de restablecimiento de la supervisión de puerta
Figura 20: Estación de robot de soldadura con equipos de seguridad
3HAC031146-005 Revisión - 33

8 Equipos de seguridad8.1: Funciones de seguridad
© C
opyr
ight
200
8 A
BB
. Res
erva
dos t
odos
los d
erec
hos.
34 3HAC031146-005 Revisión -


ABB ABRobotics ProductsS-721 68 VÄSTERÅSSUECIATeléfono: +46 (0) 21 344000Fax: +46 (0) 21 132592
3HA
C03
1146
-005
, Rev
isió
n -,
es