PROBLEMAS DE TEORÍA DE MÁQUINAS Y MECANISMOS … resuelt… · PROBLEMAS DE TEORÍA DE MÁQUINAS...
14
PROBLEMAS DE TEORÍA DE MÁQUINAS Y MECANISMOS RESUELTOS EN CLASE (NO DEL LIBRO) (CURSO 2013-2014). 1) La barra AB conecta dos correderas en A y en B. Si V B = 5 m/s, calcular analíticamente V A . 0 1 2 - 0 0 k j i i 5 R ω v v v v AB AB AB B AB B A Como O es el centro de rotación de la corredera (eslabón 4), se puede relacionar con el punto A de la corredera: 0 45 cos 1 - 45 sen 1 0 0 k j i R ω v v v 4 AO 4 AO O A rad/s 5 rad/s 14 , 14 0 45 cos 1 - 45 sen 1 0 0 k j i 0 1 2 0 0 k j i i 5 AB 4 4 AB j 10 i 10 0 1 2 - 5 0 0 k j i i 5 R ω v v v AB AB AB B A Por lo tanto: s / m 14 , 14 v ; j 10 i 10 v (rad/s) k 5 A A AB
Transcript of PROBLEMAS DE TEORÍA DE MÁQUINAS Y MECANISMOS … resuelt… · PROBLEMAS DE TEORÍA DE MÁQUINAS...

PROBLEMAS DE TEORÍA DE MÁQUINAS Y MECANISMOS RESUELTOS EN CLASE (NO DEL LIBRO) (CURSO 2013-2014). 1) La barra AB conecta dos correderas en
A y en B. Si VB = 5 m/s, calcular analíticamente VA.
012-
00
kji
i5Rωvvvv ABABABBABBA
Como O es el centro de rotación de la corredera (eslabón 4), se puede relacionar con el punto A de la corredera:
045 cos1-45sen 1
00
kji
Rωvvv 4AO4AOOA
rad/s 5
rad/s 14,14
045 cos1-45sen 1
00
kji
012
00
kji
i5AB
4
4AB
j10i10
012-
500
kji
i5Rωvvv ABABABBA
Por lo tanto:
s/m 14,14 v; j10i10v
(rad/s) k5
AA
AB

2) Dos collarines C y D se mueven a lo
largo de la barra vertical mostrada. Si la velocidad del collarín C es de 660 mm/s hacia abajo, determinar analíticamente:
a. Velocidad del collarín D. b. Velocidad angular del
elemento AB.
00,32-0,24
ω00
k j i
00,10-0,24
ω00
k j i
j66,0vvvvvv
vvv23BABCC
BAAB
BCCB
s
radk4 ω
s
radk1,25 ω
jω0,24 iω32,0 jω0,24 iω0,10 j66,0
3
2
2233
j0,3 i0,4
00,32-0,24
1,2500
k j i
Rωvv BA2BAB
s
mj1,26 v
s
radk4- ω
00,10-0,24-
ω00
k j i
j0,3 i0,4 jvvvv
D
4
4DBABD
3) En la figura adjunta, el diámetro del disco es de 1 m. y la longitud de la barra AB es de 1 m. El disco está rodando sin deslizamiento y el punto B se desliza sobre la superficie plana. Determinar analíticamente la velocidad angular de la barra AB y la velocidad del punto B.
El punto de contacto entre la rueda y la superficie plana (punto O2) es el CIR I12 y por lo tanto no tiene velocidad. Si el centro de coordenadas es dicho punto O2.
j2i2
00,50,5
400
kji
Rωvvv222 AO2AOOA
s
rad 2,30ω
s
m 3,15v
00,5-0,87
ω00
kji
j2i2i vvvv
3
B
3BBAAB
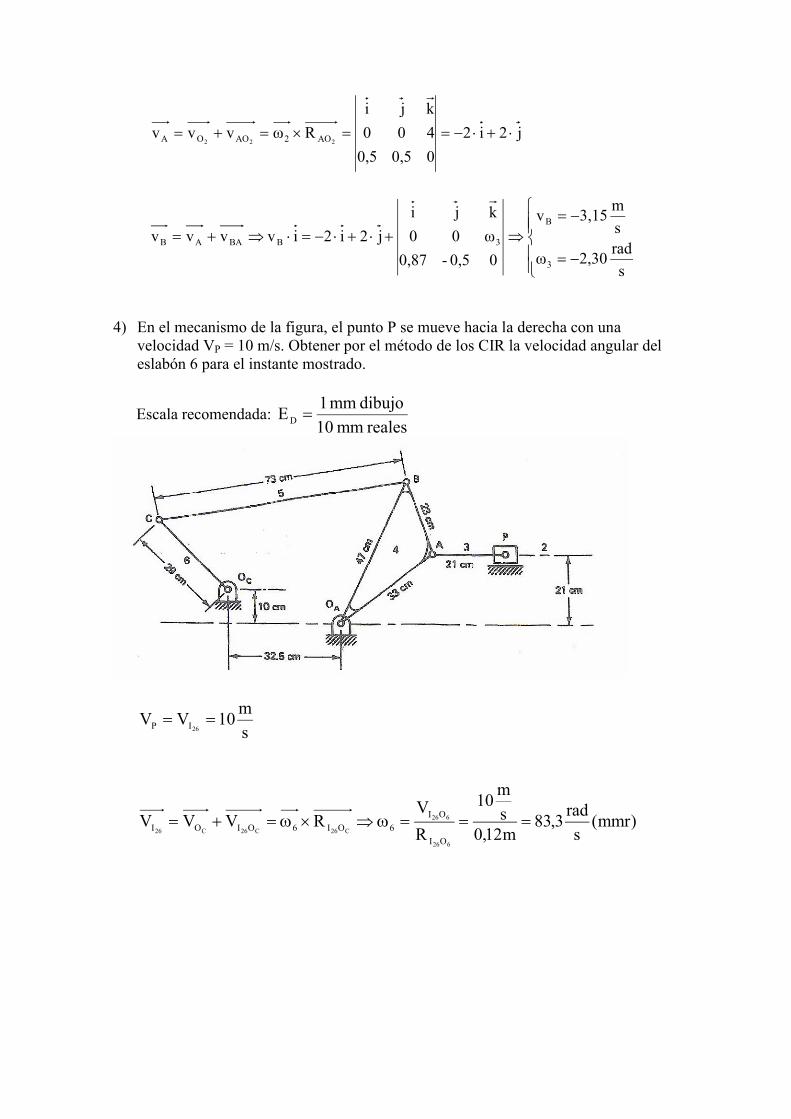
4) En el mecanismo de la figura, el punto P se mueve hacia la derecha con una
velocidad VP = 10 m/s. Obtener por el método de los CIR la velocidad angular del eslabón 6 para el instante mostrado.
Escala recomendada: reales mm 10
dibujo mm 1ED
s
m10VV
26IP
)mmr(s
rad3,83
m12,0s
m10
R
VRVVV
626
626
C26C26C26
OI
OI
6OI6OIOI

5) Dos barras rígidas, ABC y CDE, están articuladas entre sí en C y articuladas a los bloques deslizantes en las guías fijas en A, B, y E como se ve en la figura.
En la posición indicada la velocidad de A es igual a 5 cm/s.
Localizar el centro instantáneo de rotación de la barra CDE y determinar la velocidad del punto D.
Datos: AB = 13,65 cm, BC = 3,75 cm, CD = 6,25 cm, DE = 10 cm

6) La barra AB se mueve con la velocidad angular y
aceleración angular mostradas. a. Determinar analíticamente la veloc.
angular de la barra AC y la velocidad del pasador A respecto a la ranura de la barra AB.
b. Determinar analíticamente la aceleración angular de AC y la aceleración del pasador A respecto a la ranura en la barra AB.

3/223
22
33
3/223
ABACA
BABA
CACA
AAA
vvv
vvv
vvv
vvv
; j1,6 i0,8
00,40,8
200
k j i
Rωv BA2BA 22
j º 26,6 cosv i º 26,6 cosvv ;º 26,60,8
0,4 tgarcα
3/23/23/2 AAA
j º 26,6 cosv i º 26,6 cosv j1,6 i0,8
00,40
ω00
k j i
3/23/2 AA3
j1,6 i3,2v ;s
m 3,58 v;k10 ω ;
s
rad 10ω
3/23/2 AA33
tA
cAA
tBA
nBA
tCA
nCA
tBA
nBABA
tCA
nCACA
tA
nA
cAAAA
3/2232233
222
333
3/23/22323
AAAAAA
AAAA
AAAA
AAAAA
;
00,40
ε00
k j i
RεA ; j6,1RωA
j º 26,6 cosA i º 26,6 cosAA ; 0ρ
vA ;
01,63,2
200
k j i
2vω2A ;
00,40,8
1000
k j i
A ; j1,6 i3,2RωA
3CA3t
CACA23
nCA
tA
tA
tA
23n
A
A2c
AAt
BABA22
nBA
3333
3/23/23/2
2/2
3/2
3/2232222
3/23/23/2 A
t
A2
t
A23 A j 33,64 i 67,18 A ;s
m 75,13A ;
s
radk170ε
7) La barra AD está doblada en forma de un arco de círculo de radio b = 200 mm. La
posición de la barra se controla mediante el pasador B que resbala en la ranura horizontal y que también resbala a lo largo de la barra. Sabiendo que en el instante mostrado el pasador B se mueve hacia la derecha con una rapidez constante de 0,1 m/s, obtener de forma analítica:

a. Velocidad angular de la barra. b. Aceleración angular de la barra.
s
m i0,1v
3B
ABBBBABAB
ABAB
BBB
23/233/223
22
3/223 vvvvvvvvvv
vvv
Aplicando el teorema del coseno:
m 0,33mm 66,273AB 110º cos2002002200200AB 222
j2
110ºsen v i
2
110º cosvv ; jω0,33
000,33
ω00
k j i
Rωv3/23/23/222 BBB22AB2AB
s
rad 0,42ω
s
m 0,17v
jω0,33 j2
110ºsen v i
2
110º cosv i0,1
2
B
2BB
3/2
3/23/2
tB
nB
cBB
tAB
nAB
tAB
nABAB
tB
nB
cBBBB
3/23/22322
222
3/23/22323AAAAA0
AAAA
AAAAA
22tB
tB
tB
22Bn
B
B2c
BB2AB2t
AB2AB22
nAB
s
rad0,26ε ; j
2
110ºsen i
2
110º cosAt AA
; j0,083 i0,118 j2
110º cos i
2
110ºsen
0,2
0,17n
ρ
vA ; j0,082 i0,117
vω2A ; jε0,33RεA ; s
m i0,058RωA
3/23/23/2
3/2
3/2
3/2232222

8) a. Determinar el par motor que hay
que aplicar a la barra de entrada para equilibrar estáticamente el mecanismo. Dibujar el diagrama de cuerpo libre de todos los eslabones.
b. Determinar el par motor que
habría que aplicar, en el caso de que PB fuese horizontal con sentido hacia la izquierda.
Datos: O2A = 75 mm, AB = O4C = 200 mm, AC = 300 mm, BC =150 mm, O2O4 = 400 mm.
N 50
mm 1E ;
reales mm 5
dibujo mm 1E FD ;
a)
mN 108,5M m; 0,070 h
kN; 1FFF kN; 1,55FFF
122
144334123223
b) mN 86,25M m; 0,075 h kN; 1,15F 12232
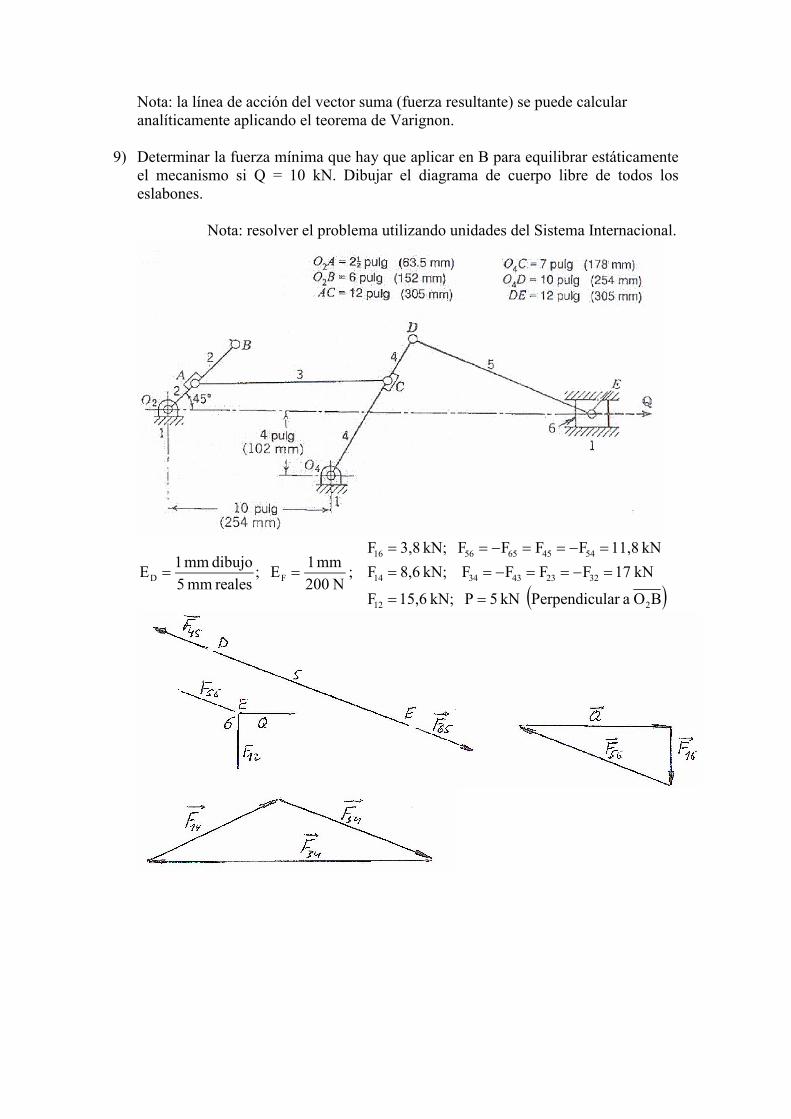
Nota: la línea de acción del vector suma (fuerza resultante) se puede calcular analíticamente aplicando el teorema de Varignon.
9) Determinar la fuerza mínima que hay que aplicar en B para equilibrar estáticamente
el mecanismo si Q = 10 kN. Dibujar el diagrama de cuerpo libre de todos los eslabones.
Nota: resolver el problema utilizando unidades del Sistema Internacional.
N 200
mm 1E ;
reales mm 5
dibujo mm 1E FD ;
BO alar Perpendicu kN 5P kN; 15,6F
kN 17FFFF kN; 8,6F
kN 11,8FFFF kN; 3,8F
212
3223433414
5445655616
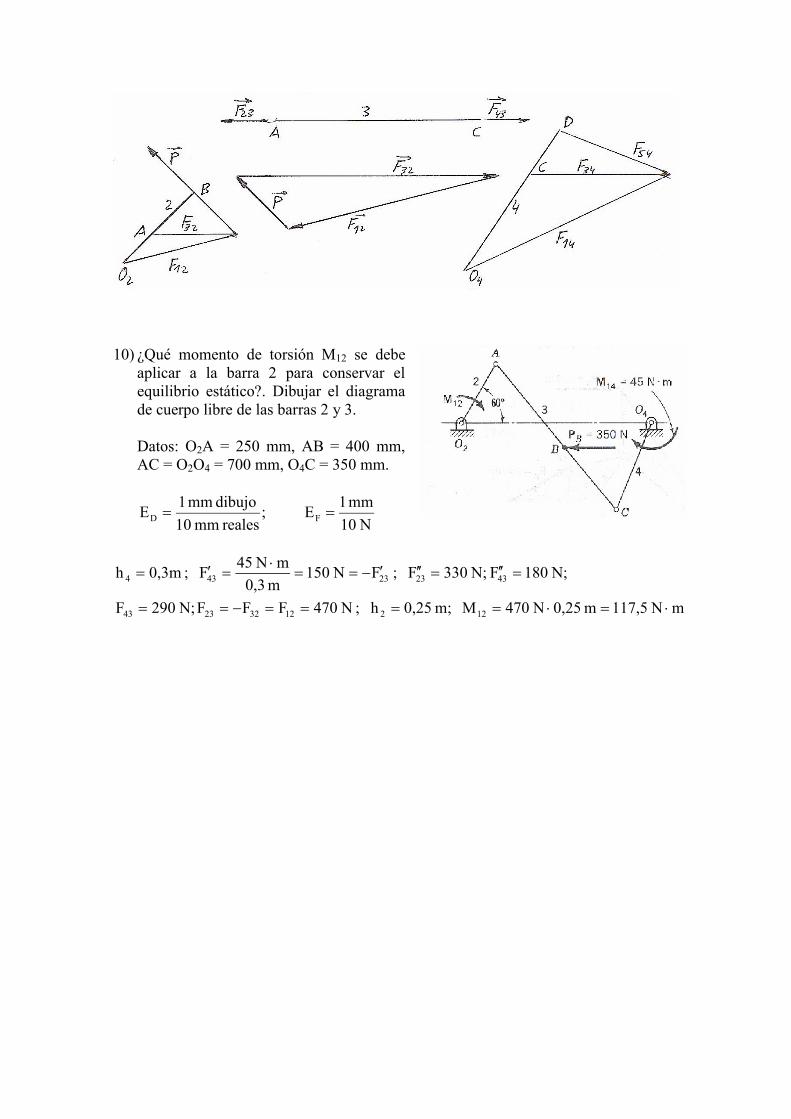
10) ¿Qué momento de torsión M12 se debe
aplicar a la barra 2 para conservar el equilibrio estático?. Dibujar el diagrama de cuerpo libre de las barras 2 y 3.
Datos: O2A = 250 mm, AB = 400 mm, AC = O2O4 = 700 mm, O4C = 350 mm.
N 10
mm 1E ;
reales mm 10
dibujo mm 1E FD
mN 117,5m 0,25N 470M m; 0,25h ; N 470FFFN; 290F
N; 180F N; 330F ; FN 150m 0,3
mN 45F ; 0,3mh
12212322343
432323434
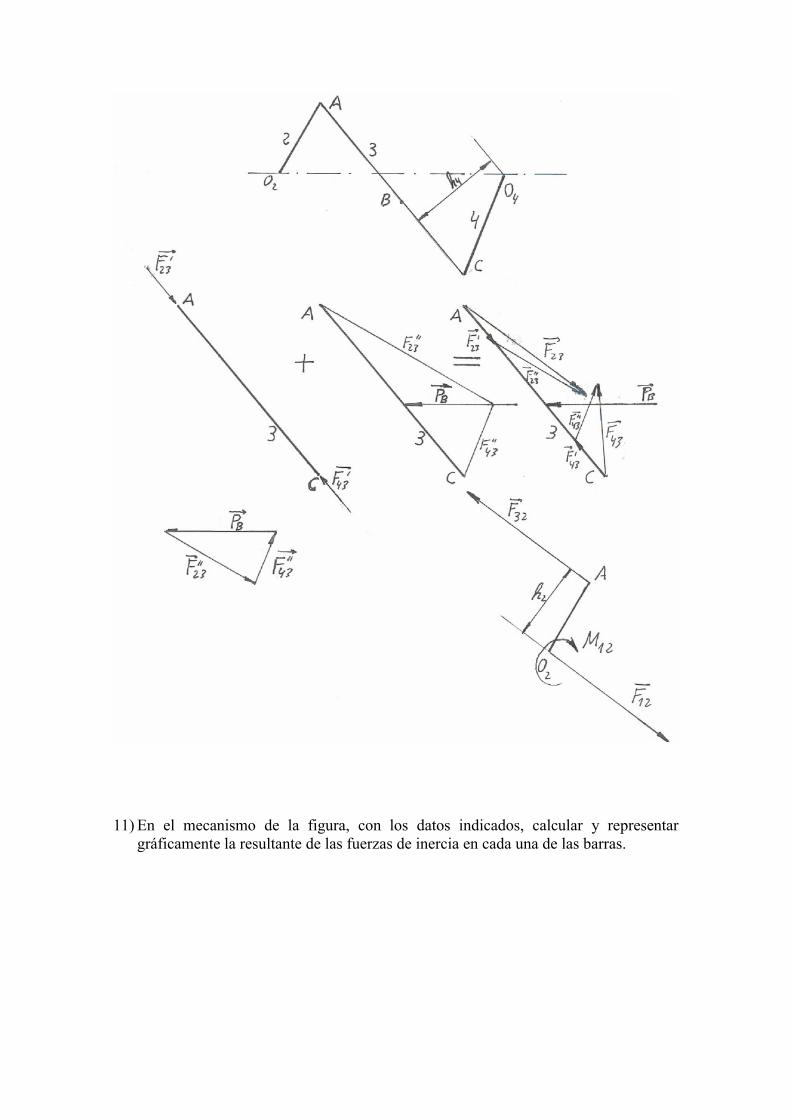
11) En el mecanismo de la figura, con los datos indicados, calcular y representar
gráficamente la resultante de las fuerzas de inercia en cada una de las barras.
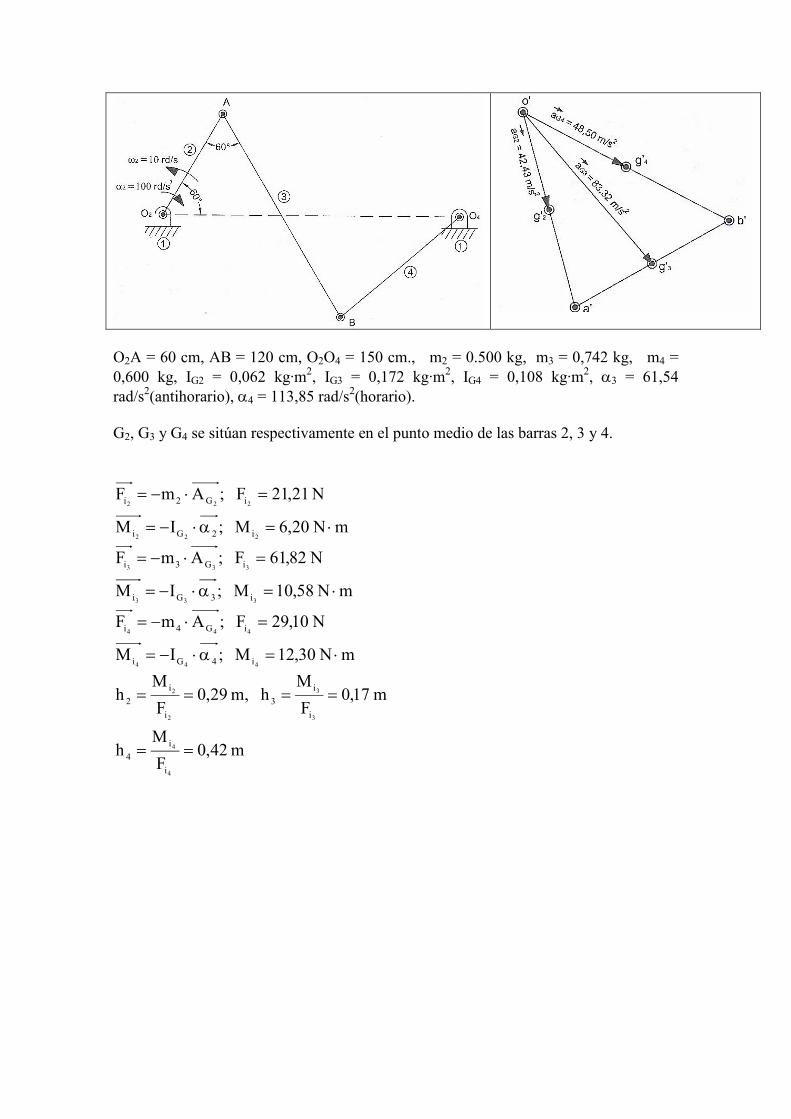
O2A = 60 cm, AB = 120 cm, O2O4 = 150 cm., m2 = 0.500 kg, m3 = 0,742 kg, m4 = 0,600 kg, IG2 = 0,062 kg·m2, IG3 = 0,172 kg·m2, IG4 = 0,108 kg·m2, 3 = 61,54 rad/s2(antihorario), 4 = 113,85 rad/s2(horario). G2, G3 y G4 se sitúan respectivamente en el punto medio de las barras 2, 3 y 4.
mN 20,6M ;IM
N 21,21F ;AmF
222
222
i2Gi
iG2i
mN 58,10M ;IM
N 82,61F ;AmF
333
333
i3Gi
iG3i
mN 30,12M ;IM
N 10,29F ;AmF
444
444
i4Gi
iG4i
m 42,0F
Mh
m 17,0F
Mh ,m 29,0
F
Mh
4
4
3
3
2
2
i
i
4
i
i
3
i
i
2
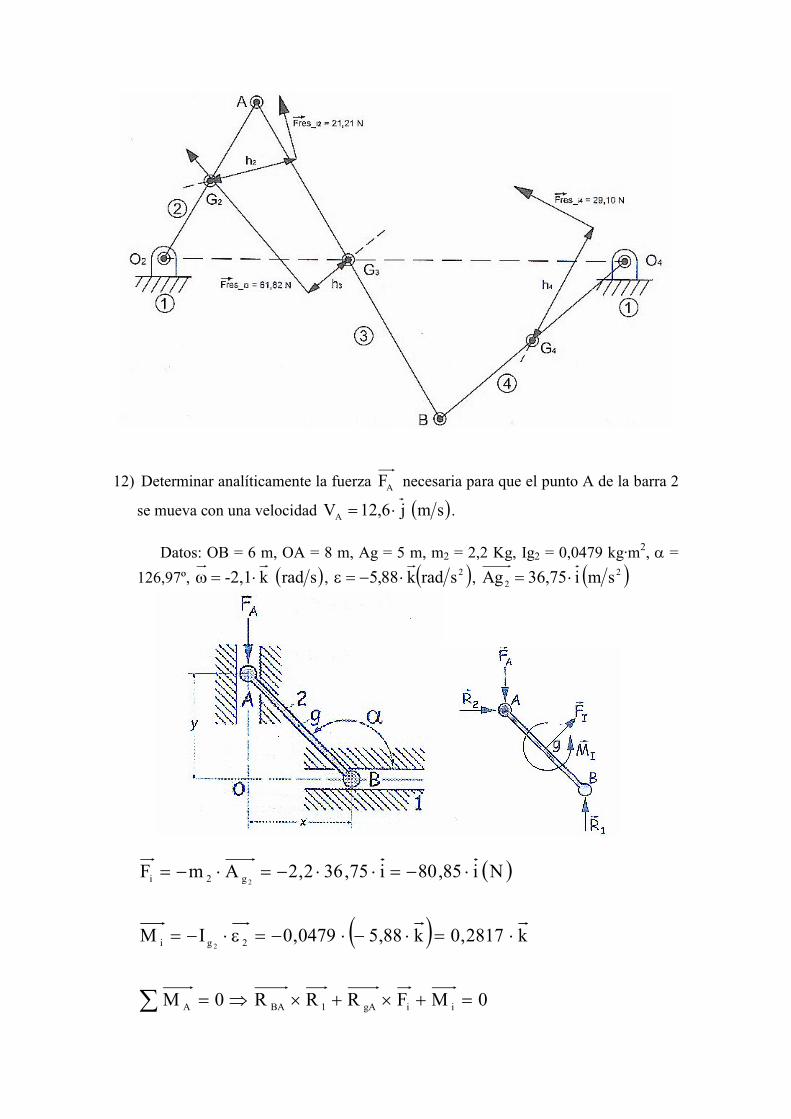
12) Determinar analíticamente la fuerza AF necesaria para que el punto A de la barra 2
se mueva con una velocidad sm j6,12VA .
Datos: OB = 6 m, OA = 8 m, Ag = 5 m, m2 = 2,2 Kg, Ig2 = 0,0479 kg·m2, =
126,97º, srad k -2,1 , 2sradk88,5 , 2
2 sm i75,36 gA
0MFRRR0M
k2817,0k88,50479,0IM
N i85,80i75,362,2AmF
iigA1BAA
2gi
g2i
2
2

N j 85,53R N; 85,53R
0k88,50479,0
0085,80
087,126180sen587,126180cos5
kji
0R0
086
kji
11
1
N 85,53F
N 85,80R0j85,53i85,80jFiR0F
A
2
A2
N j85,53F ;N i85,80R A2