Presentación Gapsi Pizzoleo y Sofia Sanz - eModa Day Buenos Aires 2016

Diseño de Sistemas de Control Robusto No Lineal para Procesos
con Gran Incertidumbre
Grupo de Ingeniería de Controlhttp://www.ayc.unavarra.es/ceg/home.htm
Departamento de Automática y Computación.Universidad Pública de Navarra, Pamplona
Departamento de Ingeniería Eléctrica. Área Ing.Sistemas. Universidad de La Rioja
Red Temática de Ingeniería de ControlSevilla, 4-5 Marzo 2004

Grupo de Investigación
• Grupo de Ingeniería de Controlhttp://www.ayc.unavarra.es/ceg/home.htm
Head of the Group: Prof.Dr. Mario García-Sanz
Doctors: Dr. Igor Egaña Santamarina
Dra. Montserrat Gil Martínez
Dr. Juan Carlos Guillén
Dr. Xabier Ostolaza Zamora
PhD. Students: Marta Barreras Ana Huarte
Alejandro Asenjo Javier Castillejo
Juan Antonio Osés Pablo Vital
Javier Villanueva Juan José Martín
Manuel Motilva Irene Eguinoa
Europe
Pamplona &Logroño (Spain)

Justificación. Problemática¿Siempre existe solución al problema de control realimentado?
Múltiples especificaciones robustas
¿Compatibilidad?
Múltiples especificaciones robustas
¿Compatibilidad?
Especificaciones arbitrariamente exigentes
Especificaciones arbitrariamente exigentes
Incertidumbre arbitrariamente grande
Incertidumbre arbitrariamente grande
Objetivos contrapuestos
Objetivos contrapuestos
QFT (Quantitative Feedback Theory) permite cuantificar la influencia de todos estos factores, en el dominio de la frecuencia. Tesis Doctoral “Síntesis de controladores robustos mediante el análisis de la compatibilidad de especificaciones e incertidumbre”. Montserrat Gil Martínez

Justificación. SolucionesObjetivoDiseño de un controlador QFT, con performanceadecuado, para sistemas de gran incertidumbre.
Si no es posible:Relajar especificaciones de control.
Si el comportamiento no es adecuado:División de la incertidumbre. Varios controladores: Controller-Scheduler.CONTROL NO LINEAL.

Control No-LinealController-Scheduler
Identificación Punto Operación: ‘• ’
GF P
d1 d2
r
n
yue+
-
+
+
+
+
Pre-filtro Controlador Planta con Incertidumbre +
+
Scheduler de Controladores:
F1, G1
F2, G2
...
Fn, Gn
Selección Fi, Gi
12... n
2 12...n
∠ P
|P|ω1
ω2
P(jωi)

Etapas diseño Controller-Scheduler• Cómo dividir la incertidumbre
– Estudio de los contornos y forma diseño QFT.– Variable auxiliar (scheduled variable).– Aplicación particular.
• Diseño de controladores– para cada zona de incertidumbre con QFT
• Familia de Controladores Lineales– función de la incertidumbre paramétrica de la planta
• Implementación del Controller-Scheduler– Coeficientes o estructura de los controladores, cambian
de acuerdo al valor actual de la variable auxiliar.• Estudio del Performance
– ¿Analíticamente?. Simulación

¿Cómo dividir la incertidumbre?• Para un diseño óptimo: mejor performance al
mínimo coste. Sin perder, la estabilidad robusta.• Empleando QFT: templates, contornos, planta
nominal, loopshaping.– Tipología de contornos.– Influencia de la especificación de control.– Influencia de la incertidumbre paramétrica.
• Realización del mínimo numero de divisiones.• Otros factores:
– Aplicación particular.– Estructura Scheduler.

Compatibilidad Contornos QFT. Tipologías
G(s)F(s) P(s)
D1(s) D2(s)
R(s)
N(s)
Y(s)
U(s)
+
−
++
++
+
+
Prefiltro Controlador Planta con Incertidumbre
H(s)
Sensor
Tipo nBeneficios
Realimentación
“Simultaneous meeting of robust control specifications in QFT,” M. Gil-Martínez, and M. García-Sanz,Proc. 5th International Symposium on QFT and Robust Frequency Domain Methods, Pamplona, Spain, Aug. 2001, pp.193-202. Also accepted for the Special Issue on Frequency Domain Methods of the Int. J. Robust Control, expected publication date: 2004.
Tipo oEstabilidad
Tipo uLimitaciones Realimentación
Especificación Robusta Valor Tipología
11 <δ u1
11 δ≤==
NY
DUT
11 >δ o
12 <δ n2
22 δ≤=
DYT
12 >δ o
p<3δ n3
13 δ≤=
DYT
3 p>δ o
p<4δ u4
24 δ≤===
RFU
NU
DUT
/14 p>δ o
minmax pp /5 <δ n5sup55inf δδ ≤=<
RY
T , inf5
sup55
5
δδ
δ =≤FT
minmax pp /5 >δ o
Mag
nitu
d: |G
P 0|
Fase: ∠ GP0

‘Agresividad’ Contorno QFT y Especificación
l [dB]
ψ0 [º]
l [dB]
360º 0º ψ0 [º]360ºº 0º ψ0 [º]360º
0º
0º
Incremento ‘agresividad’ de contorno y de especificación
“Robust specification influence on feedback control strategies.” M. Gil-Martínez, and M. García-Sanz,Proc. 15th IFAC World Congress on Automatic Control, Barcelona, Spain, 21-26 July 2002, 6 pp.

Incertidumbre y Contornos QFT
ψ0 [º]
Bounds QFT en ωi para L0. Reducción sensibilidad l.c. a variación parámetros en l.a.
Reducción ganancias ωi→ Reducción Ueffort
Reducción ganancias ωhf→ Reducción amplificación ruidos y perturbaciones hf
2
l [dB]L=G⋅P=l∠ψ
360º 0º180º
PT
Pd1L0T
L0d1
ωi
ωhf
Pd1
PT
∠ P=θ
∆θd1
P(jωhf)
No división incertidumbre en ωhfpara estabilidad robusta
“Robust tracking performance enhancement through uncertainty division.” M. Gil-Martínez, and M.García-Sanz, European ControlConference, (ECC), Cambridge, Sep 2003
Bounds QFT ωhf.Estabilidad l.c. en términos de L0.
∆θT
∆pTP(jωi)
|P|=p Varias divisiones incertidumbre en ωinterés
“Plant Uncertainty Contribution to QFT Tracking Control Design” M. Gil-Martínez, and M. García-Sanz, Robust Control Design (ROCOND), Milán, Jun. 2003
∆pd1
Reducción tamaño incertidumbre en fase y ganancia

Ejemplo simulación: Motor DCParameter Nominal ValuesUnload Rotor Inertia, J 0.01 kg m2
Friction, b 0.1 N m sMotor constant, Km 0.05 N m /AField Resistance, Rf 1 ΩField Inductance, Lf <<0.1 HbsJ
KbsJ
RKV
sP
bJRLfm
f
ff
+=
+==
<</
)(
//Ω
Modelo:
I
R L
J, b
V
ω
+
−E
+
−
Incertidumbre: K=[0.0475, 0.0525]; J=[0.01, 0.1]; b=[0.08, 0.12]

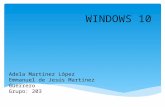
Motor DC. División Incertidumbre
-8 -6 -4 -2 0-10
-8
-6
-4
-2
plant phase (º)
plant magnitude (dB)
-60 -40 -20 0-12
-10
-8
-6
-4
-2
plant phase (º)
plant magnitude (dB)
-90 -80 -70 -60 -50 -40-28
-24
-20
-16
-12
-8
plant phase (º)
plant magnitude (dB)
-90 -88 -86 -84 -82-50
-45
-40
-35
-30
-25
-20
plant phase (º)
plant magnitude (dB)
JD2
(a) frequency=0.1 (rad/s)
(c) frequency=10 (rad/s)
(b) frequency=1 (rad/s)
(d) frequency=100 (rad/s)
JD1
JD1
JD2
JD2 JD1
JD1
JD2
JT=[0.01, 0.1]JD!=[0.01, 0.05]JD2=[0.05, 0.1]

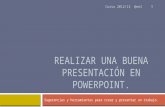
Motor DC. Diseño Controladores QFT
-360 -270 -180 -90 0-50
-40
-30
-20
-10
0
10
20
30
40
50
60
phase (º)
magnitude (dB)
-360 -270 -180 -90 0-50
-40
-30
-20
-10
0
10
20
30
40
50
60
phase (º)
agnitude(dB)
B(j0.1)
B(j1)
B(j10)
B(j100)
ω=10
ω=1
ω=0.1
L0(jω) P0(jω)
ω=100
B(j0.1)
B(j1)
B(j10)
ω=0.1
ω=1
ω=10B(j100)
ω=100
L0(jω) P0(jω)
(a) (b)
-360 -270 -180 -90 0-50
-40
-30
-20
-10
0
10
20
30
40
50
60
phase (º)
magntude(dB)
(a)
-360 -270 -180 -90 0-50
-40
-30
-20
-10
0
10
20
30
40
50
60
phase (º)
magnitude (dB)
(b)
B(j0.1)
B(j1)
B(j10) B(j100)
L0(jω)
P0(jω)
ω=10
ω=1
ω=0.1
ω=100
B(j0.1)
B(j1)
B(j10) B(j100)
L0(jω)
P0(jω)
ω=10
ω=1
ω=0.1
ω=100
JT JD1 JD2
m

Motor DC. Beneficios División Incertidumbre
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
time (s)
rotor speed (rad/s)
0 1 2 3-5
0
5
10
field voltage (V)
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
time (s)
rtrs
(r/s)
0 1 2 3-5
0
5
10
field voltage (V)
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
time (s)
rotor speed (rad/s)
0 1 2 3-2
0
2
4
6
field voltage (V)
0 0.5 1 1.5 2 2.5 30
0.2
0.4
0.6
0.8
1
time (s)
rotorspeed(rad/s)
0 1 2 3-2
0
2
4
6
field voltage (V)
JT JD1 JD2
ad
peed
oo
ti ( )
+
+= 1
5.1751
7.071.37)( ssssGT
+
+= 1
7.261
1.22.16)(1
ssssGD
+
+= 1
61.181
7.37.27)(2
ssssGD

Aplicación real. MOTOR DC

Modelo con IncertidumbrePlantillas QFTIncertidumbre total: τ=[1, 10],División 1: τ1=[1, 4.5] División 2: τ2=[4.5, 10]
11
11
)()()( 0
+=
+==
ssCRsQsQsP
i τ
Ejemplo. Sistema Fluidos
qo(t)
qi(t)
h(t)
CapacitanceC
ResistanceR
Load Valve
Control Valve
Especificaciones Robustas ControlEstabilidad:
PM≥45º GM ≥ 5dB |T1|=|L/(1+L)|≤δ1,
δ1(ωi1)= δ1 (0.1,0.7,1,100)=1.3
Seguimiento referencias:|T5/F|=|L/(1+L)|≤δ5, δ5(ωi5=0.1,0.7,1)=1.001, 1.061, 3.129
Limitaciones de la realimentación:|L(ωhf)|<-12dB, ωhf>100

Sistema FluidosDiseño de Controladores QFT
(a) Total τ=[1, 10], (b) Division1 τ1=[1, 4.5], (c) Division2 τ2=[4.5, 10]

(a)(c)(e): Outflow qo tracking performance of GT, Gd1 and Gd2, (b)(d)(f): Control inflow qi demanded by GT, Gd1 and Gd2, Simulations for nominal plants τ0T=10, τ0d1=4.5, τ0d2=10.
Sistema FluidosBeneficios División Incertidumbre
Pre-filtro
+
+= 1
101
31)( sssF
Controlador
+
+= 1
5.4291
16.095.98)( ssssGT
+
+= 1
36.671
70.098.61)(2
ssssGd
+
+= 1
4.1711
31.013.33)(1
ssssGd

Aplicación real:Procesos de Fluidos

ConclusionesObjetivoSi gran incertidumbre en modelo, para comportamiento adecuado: división de la incertidumbre. Controller-Scheduler.Estudios (QFT)
• Cómo dividir la incertidumbre.• Diseño de controladores • Familia de Controladores Lineales• Implementación del Controller-Scheduler• Estudio del Performance
Aplicaciones• Motor Dc• Planta de Pasteurización

Otras líneas Investigación del Grupo• Control Multivariable
• Control Distribuido