PERSISTENCIA DE FRENTES OCEÁNICOS EN EL GOLFO DE ... · Agradecimientos Una vez terminado esta...
78
PERSISTENCIA DE FRENTES OCEÁNICOS EN EL GOLFO DE CALIFORNIA MEDIANTE PERCEPCIÓN REMOTA TESIS QUE PARA OBTENER EL GRADO DE MAESTRÍA EN CIENCIAS EN MANEJO DE RECURSOS MARINOS PRESENTA FRANK CLAUDIO OLAYA LA PAZ, B. C. S., DICIEMBRE DE 2016 INSTITUTO POLITÉCNICO NACIONAL CENTRO INTERDISCIPLINARIO DE CIENCIAS MARINAS
Transcript of PERSISTENCIA DE FRENTES OCEÁNICOS EN EL GOLFO DE ... · Agradecimientos Una vez terminado esta...
PERSISTENCIA DE FRENTES OCEÁNICOS EN EL
GOLFO DE CALIFORNIA MEDIANTE
PERCEPCIÓN REMOTA
TESIS
QUE PARA OBTENER EL GRADO DE MAESTRÍA EN CIENCIAS EN MANEJO DE RECURSOS MARINOS
PRESENTA
FRANK CLAUDIO OLAYA
LA PAZ, B. C. S., DICIEMBRE DE 2016
INSTITUTO POLITÉCNICO NACIONAL
CENTRO INTERDISCIPLINARIO DE CIENCIAS MARINAS

DEDICATORIA
A MI HIJO, MATEO OLAYA HERRERA
A MI MADRE, MANUELA OLAYA MARTÍNEZ
A MI HERMANA, CAMILA MARTÍNEZ OLAYA
A MIS HERMANOS, JORGE MARTÍNEZ Y EDWIN CARO
A TODA MI FAMILIA

Agradecimientos
Una vez terminado esta etapa de mi vida quiero agradecer primeramente al Padre
Celestial el cual ha guiado cada uno de mis caminos. A cada una de las personas que
hicieron parte de este proceso, en especial al Dr. Guillermo Martínez Flores por la
oportunidad y la confianza que me dio para desarrollar este trabajo. A mi codirector Dr.
Oleg Zaitsev por sus conocimientos, y a mi comité tutorial integrado por los Doctores
Enrique H. Nava Sánchez, Víctor M. Gómez y Gerardo Aceves Medina por hacer parte
de este trabajo. A los profesores y compañeros del departamento de oceanologia del
CICIMAR, por sus aportes en los seminarios y en algunos casos por sus muestras de
apoyo.
Al CICIMAR-IPN por brindarme la oportunidad y el apoyo de realizar el posgrado en esta
institución para realizar mis sueños y demostrar mis capacidades en el ámbito
profesional. A CONACYT por los recursos brindados durante estos dos años de
maestría. A Humberto Cesaña Amador y Cesar Casas Núñez del departamento de
servicios educativos, por la disposición que siempre me han brindado, por estar atentos
del proceso del alumno, por mantenernos informados y ser pieza clave en todos los
procesos académico.
Gracias a mi madre Manuela Olaya y mi hermana Camila Martínez porque a distancia
siempre me han brindado su apoyo moral y su amor, permitiendo que sea su orgullo por
las cosas que he alcanzado. A mi hijo le doy gracias pues sé que, aunque me aleje de
su vida por un tiempo me tiene en su pensamiento y en su corazón, además de ser la
fuerza pujante de este proceso. A “Amaita” (Elsy Melo) por ser mi segunda madre,
criarme a unos de sus hijos y creer en mis capacidades donde nadie las veía. A Itzy
Burgos Vásquez por ser una persona especial conmigo, por su confianza y apoyo
incondicional. A mis amigos de crianza pues siempre me reconocieron como una persona
que puede superar los escollos de la vida para lograr muchas metas y me motivaron para
no desfallecer en el intento. A mis amigos de maestría Felipe Muriel, Sergio Maciel,
Román Ahumada, Julio Parra, Cinthia Méndez por cada momento que se compartió.
CONTENIDO
1. INTRODUCCIÓN ................................................................................................... 11
1.1 Planteamiento del problema............................................................................. 13
1.2 Hipótesis .......................................................................................................... 14
1.3 Objetivo General .............................................................................................. 14
1.4 Objetivos Específicos ....................................................................................... 14
1.5 Área de Estudio ................................................................................................ 15
2 ESTADO DEL CAMPO DEL ARTE ........................................................................ 17
2.1 Percepción remota y procesamiento de imágenes .................................... 17
2.2 Técnicas para la detección de frentes .............................................................. 20
3 DATOS Y MÉTODOS ............................................................................................ 22
3.1 Datos ................................................................................................................ 22
3.1.1 Imágenes satelitales G1SST ..................................................................... 22
3.1.2 Datos del crucero oceanográfico ............................................................... 23
3.2 Métodos ........................................................................................................... 23
3.2.1 Calibración de algoritmos en imágenes sintéticas ..................................... 23
3.2.2 Detección de frentes en imágenes de temperatura superficial del mar. .... 27
3.2.3 Evaluación y comparación de algoritmos .................................................. 30
3.2.4 Persistencia e intensidad de frentes oceánicos ......................................... 34
3.2.5 Distancia de los frentes obtenidos a las estaciones de muestreo de cruceros
oceanográficos ....................................................................................................... 36
4 RESULTADOS Y DISCUSIÓN............................................................................... 38
4.1 Comparación de algoritmos de detección de frentes ....................................... 38
4.2 Estimación de persistencia e intensidad de frentes con el ACR ...................... 45
4.3 Distancia de las estaciones de muestreo a los pixeles-frente .......................... 51
4.4 Análisis de la persistencia de frentes ............................................................... 54
4.5 Análisis de la intensidad de frentes .................................................................. 57
5 CONCLUSIONES .................................................................................................. 60
RECOMENDACIONES ................................................................................................. 61
REFERENCIAS ............................................................................................................. 62
ANEXOS ....................................................................................................................... 69
Anexo 1. .................................................................................................................... 69
Anexo 2. .................................................................................................................... 71
LISTA DE FIGURAS
Figura 1. Área de estudio: Golfo de California (datos batimétricos tomados de GEBCO
http://www.gebco.net/data_and_products/gridded_bathymetry_data/).......................... 15
Figura 2. Etapas en el procedimiento de imágenes digitales, (adaptado de Larcher et al.,
2011). ............................................................................................................................ 18
Figura 3. Representación de imágenes digitales por matrices de puntos discretos
(pixeles) en una malla rectangular. a) Dos dimensiones b) Tres dimensiones. Adaptado
y modificada de Jähne. (2005). ..................................................................................... 18
Figura 4. Generación de imagen sintética. .................................................................... 23
Figura 5. Mascara de convolución de Sobel y Roberts en la dirección horizontal y vertical.
...................................................................................................................................... 24
Figura 6. Detección de bordes en imágenes sintéticas utilizando el operador Roberts. 25
Figura 7. Detección de borde en imágenes sintéticas utilizando el operador Sobel. .... 25
Figura 8. Detección de bordes en imágenes utilizando el algoritmo de Canny y de
Crecimiento de Regiones. ............................................................................................. 26
Figura 9. Diagrama conceptual para la detección de frentes en imágenes de TSM
G1SST. ......................................................................................................................... 27
Figura 10. Zonas utilizadas para comparar los algoritmos de Cayula-Cornillon, Canny y
ACR. .............................................................................................................................. 30
Figura 11. Definición de la vecindad de un pixel P. a Vecindad 4, definida sobre P y b
vecindad 8, definida sobre P. ........................................................................................ 32
Figura 12. Diagrama conceptual para determinar la persistencia e intensidad de los
frentes oceánicos en el GC. .......................................................................................... 34
Figura 13. Diagrama conceptual para determinar la distancia entre los frentes y las
estaciones de muestreo del crucero oceanográfico. ..................................................... 36
Figura 14. Imagen G1SST (2012/05/12) utilizada para la comparación de los algoritmos
de frentes oceánicos. .................................................................................................... 38
Figura 15. Comparación de los algoritmos de detección de frentes oceánicos, Canny (A),
Cayula-Cornillon (B) y ACR (C). .................................................................................... 39

Figura 16. Comparación de algoritmos de detección de frentes oceánicos en de
diferentes regiones: 1. Frente al Golfo de Ulloa; 2. Boca del GC y 3. Golfo de
Tehuantepec. ................................................................................................................ 40
Figura 17. Comparación de algoritmos de detección de frentes oceánicos en diferentes
regiones: 4. Corriente del Golfo; 5 Patagonia; y 6 Costas de Japón. ............................ 41
Figura 18. Histograma de frecuencias del número de pixeles-frente según el algoritmo de
detección aplicado y la zona evaluada. ......................................................................... 42
Figura 19. Histograma de frecuencias del número de componentes conexas según el
algoritmo de detección aplicado y la zona evaluada. .................................................... 43
Figura 20. Índice de circularidad de los pixeles-frente en cada una de las zonas de
estudio. .......................................................................................................................... 43
Figura 21. Índice de persistencia de frentes utilizado, para comparar los algoritmos de
Cayula-Cornillon, Canny y ACR. ................................................................................... 44
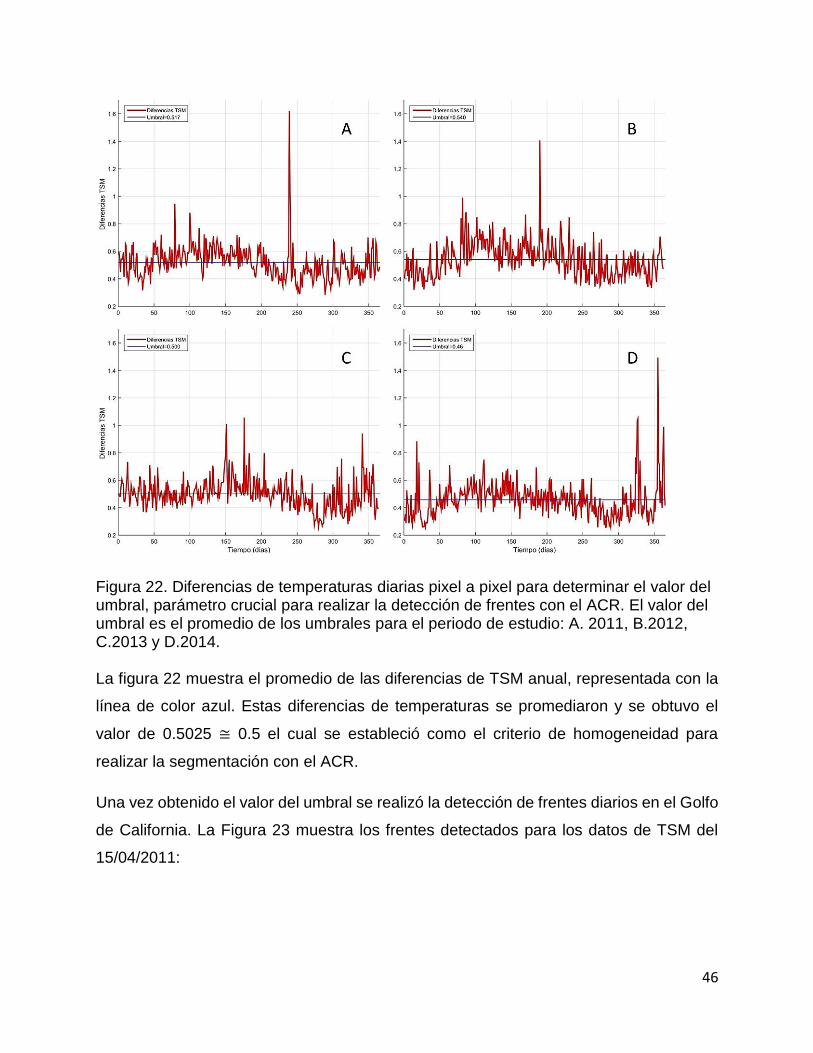
Figura 22. Diferencias de temperaturas diarias pixel a pixel para determinar el valor del
umbral, parámetro crucial para realizar la detección de frentes con el ACR. El valor del
umbral es el promedio de los umbrales para el periodo de estudio 2011-2014. ........... 46
Figura 23. Detección de frentes oceánicos en el GC para el 15/04/2011. .................... 47
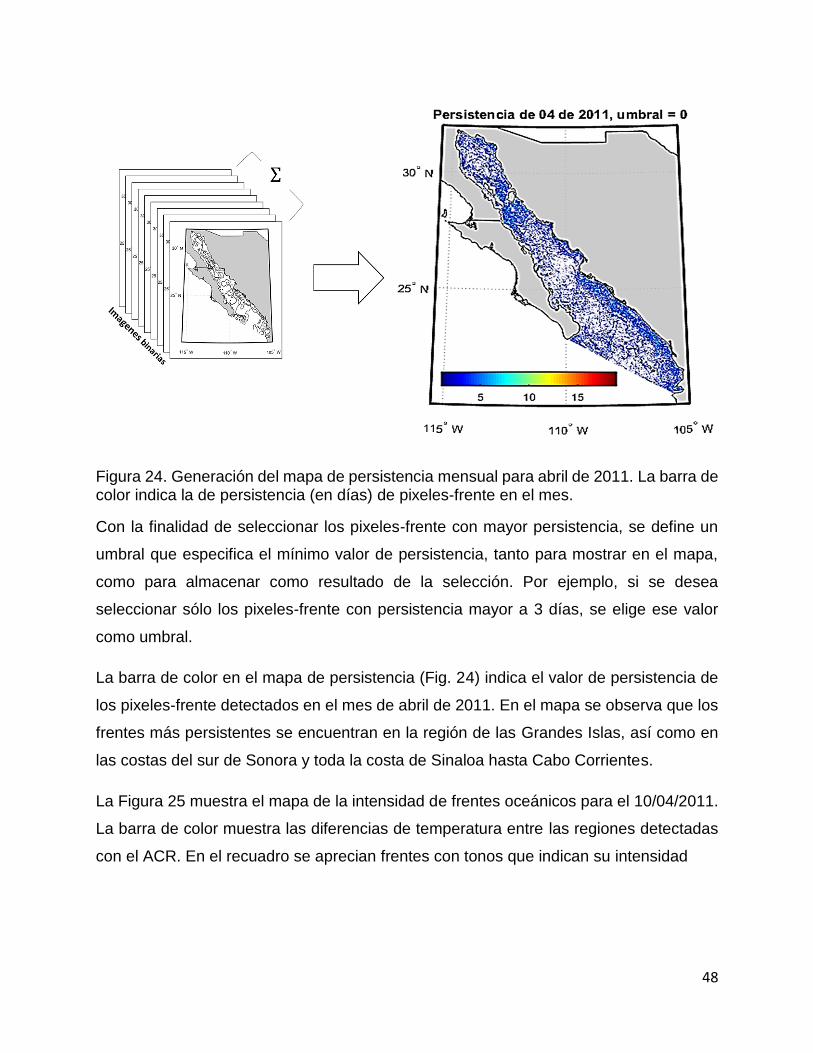
Figura 24. Generación del mapa de persistencia mensual para abril de 2011. La barra de
color indica la de persistencia (en días) de pixeles-frente en el mes. ........................... 48
Figura 25. Mapa de intensidades en el GC para 10 de abril del 2011 .......................... 49
Figura 26. Mapa de intensidades para los datos de TSM del 10/04/2011. Se utilizan
diferentes valores de umbral (0, 0.5, 0.8 y 1). ............................................................... 50
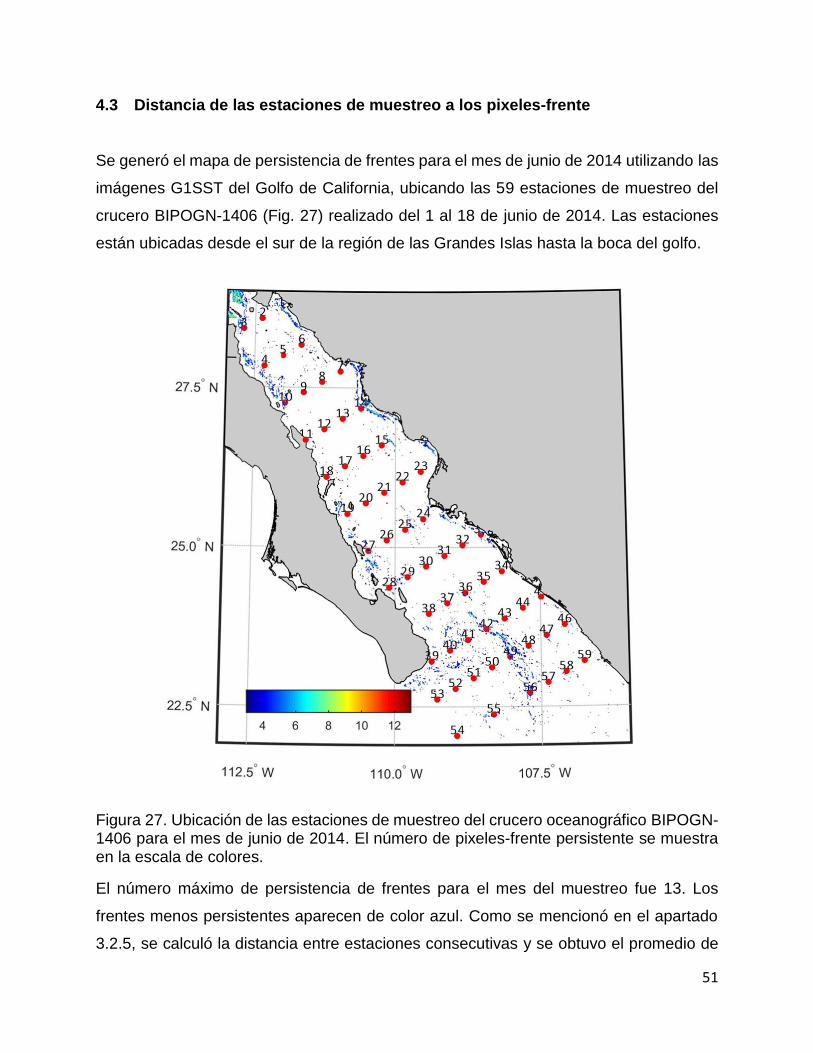
Figura 27. Ubicación de las estaciones de muestreo del crucero oceanográfico BIPOGN-
1406 para el mes de junio de 2014. El número de pixeles-frente persistente se muestra
en la escala de colores. ................................................................................................. 51
Figura 28. Distancia en las estaciones de muestreo 9 y 44 y los pixeles-frente
encontrados en cada una de ellas. ............................................................................... 52
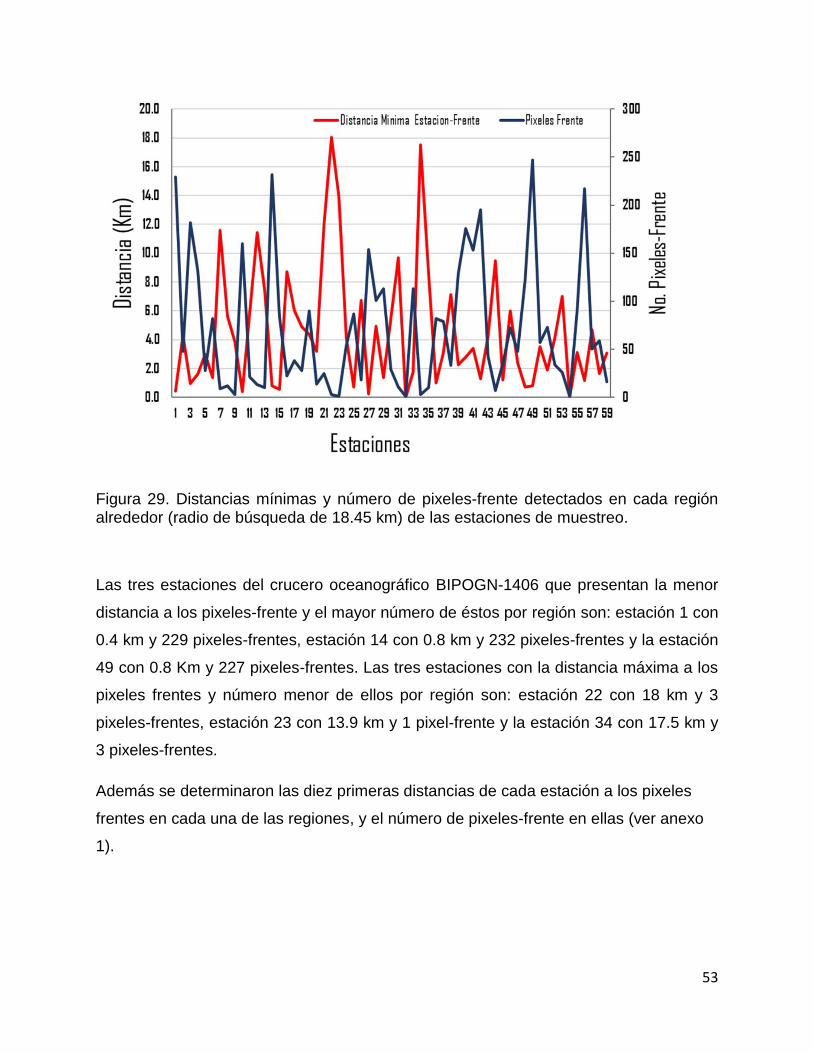
Figura 29. Distancias mínimas y número de pixeles-frente detectados en cada región
alrededor (radio de búsqueda de 18.45 km) de las estaciones de muestreo. ............... 53
Figura 30 Promedio mensual de la temperatura superficial del mar entre los años 2011 y
2014. ............................................................................................................................. 54
Figura 31. Serie de persistencias máximas mensual de los frentes oceánicos en el GC
para el periodo 2011-2014. ........................................................................................... 55
Figura 32. Mapas de persistencia mensual de pixeles-frente mayores a dos días, para
los meses de abril y septiembre de 2011. ..................................................................... 56
Figura 33. Persistencia máxima , promedio de TSM e Iindice multivariado ENSO (MEI)
para el periodo 2011 al 2014 (MEI: http://www.esrl.noaa.gov/psd/enso/mei/ ). ............. 57
Figura 34. Intensidad media mensual de los frentes en el Golfo de California para el
periodo 2011-2014. ....................................................................................................... 58
Figura 35. Acumulación mensual de las intensidades de los pixeles-frente de acuerdo a
la latitud. ........................................................................................................................ 59
LISTA DE TABLAS
Tabla 1. Sensores utilizados por Chao et al. (2009) para generar imágenes G1SST. .. 22
Tabla 2. Funciones utilizadas para la detección de frentes, utilizando ACR. ................ 29
Tabla 3. Descripción de las zonas utilizadas para comparar los algoritmos de Canny,
Cayula-Cornillon y ACR. ............................................................................................... 31
Tabla 4. Funciones desarrolladas en MATLAB para la comparación de algoritmos. .... 33
Tabla 5. Funciones codificadas en MATLAB para determinar la distancia de los frentes
a las estaciones de muestreo. ....................................................................................... 37
Tabla 6. Estaciones de muestreo del crucero oceanográfico BIPOGN-1406, con las diez
primeras distancias en las regiones circulares establecidas y el número de pixeles
frente en cada una de ellas. .......................................................................................... 69

LISTADO DE ABREVIATURAS
ACC: Agua de la Corriente de California
ACR: Algoritmo de Crecimiento de Regiones
AGC: Aguas del Golfo de California
AIP: Agua Intermedia del Pacifico
APP: Agua Profunda del Pacífico
ASE: Agua Superficial Ecuatorial
ASsSt: Agua Subsuperficial Subtropical
BOFD: Bayesian oceanic front detection
ENSO: El Niño Southern Oscillation
ERDDAP: Environmental Research Division's Data Access Program
G1SST: Global 1-km Sea Surface Temperature
GC: Golfo de California
GODAE: Global Ocean Data Assimilation Experiment
JPL: Jet Propulsion Laboratory
MODIS:
The moderate resolution imaging spectroradiometer
ROMS: Regional Ocean Modeling System
TSM: Temperatura Superficial del Mar

GLOSARIO
Borde: Se define como la frontera entre dos regiones de una imagen digital donde
ocurren cambios entre los valore de pixeles adyacente.
Componentes conexas: Es un conjunto de píxeles tal que, para cualquier par de píxeles
contenidos en el conjunto, existe un camino digital que los une.
Camino digital: Un camino digital entre un píxel p de coordenadas (𝑥, 𝑦) y un píxel 𝑞 de
coordenadas (s, t) viene definido por una sucesión de píxeles (x0, y0),(x1, y1),..., (xn, yn)
donde (𝑥0, 𝑦0) es el pixel inicial y (xn, yn) es el pixel final, y se cumple que:
(x0, y0) ≡ (x, y) son las coordenadas del píxel p
(xn, yn) ≡ (s, t) son las coordenadas del píxel q
(𝑥𝑖, 𝑦𝑖) es adyacente a (xi−1, yi−1) donde 1≤ i ≤ n; siendo n la longitud del camino. La
adyacencia se puede definir por la relación con sus 4 u 8 vecinos, determinados por la
expresión:
xi−1 = {xi + 1
óxi − 1
; yi−1 = {
yi + 1ó
yi − 1
Frente Oceánico: Área de convergencia entre dos tipos de agua de distintas
características fisicoquímicas.
Imagen digital: Es una función en dos dimensiones F(x, y) , donde x e y son
coordenadas espaciales, la amplitud F en el punto (x, y) es conocida como la intensidad
de la imagen en ese punto.
Imagen binaria: Imagen digital en la que cada pixel tiene asignado el valor de 0 ó 1.
Mar Interior: Es una extensión grande pero relativamente poco profundo de agua, dentro
de una masa de tierra, a veces conectado con el océano.
Mar Costero: O mar litoral, son mares abiertos y extensos de los océanos como los
golfos.
MATLAB: Es un lenguaje de computación técnica integrada que combina computación
numérica, visualización avanzada y programación de alto nivel.
Percepción Remota o Teledetección: Técnica a través de la cual se obtiene
información de un objeto analizando los datos adquiridos mediante algún dispositivo que
no está en contacto físico con dicho objeto.
Persistencia de frentes: Frecuencia de frentes oceánicos presentes en una zona
determinada durante un periodo.
Pixel: Unidad más pequeña que compone una imagen digital (picture element).
9
RESUMEN
Los frentes oceánicos constituyen zonas relativamente estrechas con gradientes de sus
propiedades físicas, químicas y biológicas. Además, se ha demostrado que son sitios
con alta productividad primaria. La teledetección del medio marino permite analizar el
desarrollo y la distribución de los procesos oceánicos, por lo que la frecuencia, el tamaño,
intensidad y tiempo de existencia de los frentes pueden ser caracterizados en series de
tiempo de imágenes satelitales. En este trabajo se desarrolla y aplica un algoritmo de
segmentación (crecimiento de regiones) a imágenes diarias de temperatura superficial
del mar de 1 km de resolución espacial y libres de nubosidad (G1SST), con el fin de
detectar frentes oceánicos en el Golfo de California (GC), determinando su intensidad
(diaria) y persistencia (mensual) en el periodo 2011-2014. El algoritmo de crecimiento de
regiones fue comparado con los algoritmos de Cayula-Cornillon y Canny. Para ello se
seleccionaron imágenes G1SST de seis zonas del mundo en donde se ha estudiado este
tipo de estructuras oceánicas, aplicando métricas sobre las componentes conexas en
imágenes binarias obtenidas de la detección mensual de los frentes. El algoritmo de
crecimiento de regiones detecta frentes más continuos en comparación con los
algoritmos de Canny y Cayula-Cornillon. Además de detectar frentes, el algoritmo de
crecimiento de regiones segmenta regiones, permitiendo determinar el gradiente de los
frentes. Se determinó el número de pixeles frentes mensuales del periodo establecido y
se observa la mayor persistencia para los meses de marzo y abril, y la menor en agosto
y septiembre. Se generaron los mapas mensuales de las persistencias e intensidades de
los frentes donde se observa que los frentes más persistentes e intensos en GC están
hacia las costas de los estados de Sonora y Sinaloa, como también hacia el sur de la
región de las Grandes Islas.
10
ABSTRACT
Ocean fronts are relatively narrow areas with large gradients of physical, chemical and
biological properties. Also, it has been demonstrated that those are sites with high primary
productivity. Remote sensing of the marine environment allows the analysis of the
development and distribution of ocean processes, and then the frequency, size, intensity
and time of existence of the fronts can be characterized in time series of satellite images.
This work develops and applies a segmentation algorithm (region growing) to daily sea
surface temperature images of 1 km spatial resolution and free of cloudiness (G1SST),
in order to detect ocean fronts in the Gulf of California (GC), and estimate their daily
intensity and monthly persistence during the period of 2011-2014. The region growing
algorithm was compared with the Cayula-Cornillon and Canny algorithms. For this
sequence of G1SST images six areas of the World Ocean were selected, to study this
type of ocean structures, applying metrics for the associated components in binary
images obtained from the monthly detected fronts. The region growth algorithm detects
more continuous fronts compared to the Canny and Cayula-Cornillon algorithms. In
addition to detecting fronts, the region growth algorithm segments regions, allowing the
gradient of the fronts to be determined.The number of monthly front pixels has been
determined over the entire observation period. It was found that the maximum number of
fronts was observed in March and April, and the lowest in August and September. Maps
of the monthly front persistence and intensity show that the most persistent and intense
fronts were observed in the coastal zone of the states of Sonora and Sinaloa, as well as
to the south of the Midriff Islands region.
11
1. INTRODUCCIÓN
Los frentes oceánicos son zonas relativamente estrechas en las que los gradientes de
las propiedades físicas, químicas y biológicas delinean fronteras entre diferentes tipos
de agua (Ullman y Cornillon, 1999). Los frentes son considerados estructuras dinámicas
susceptibles a inestabilidades baroclínicas que ocurren en una gran variedad de escalas.
Tienen una variabilidad propia que depende de los forzamientos que lo producen y las
condiciones oceanográficas en las que se desarrollan (Fedorov, 1986).
Los frentes son característicos tanto en las zonas costeras como oceánicas. Existen
diferentes tipos de frentes como los frentes del quiebre de la plataforma continental,
frentes termohalinos, frentes de plumas de ríos, frente de mezcla de marea, y frentes
asociados a surgencias. Estos últimos se forman por el ascenso de aguas de menor
temperatura y mayor densidad, y pueden alcanzar cientos de kilómetros a lo largo de la
costa (Letelier, 2010); además los frentes se han asociado a regiones de giros oceánicos
(Pollard y Regier, 1992; Halliwell et al. 1991).
En los mares costeros, los frentes oceánicos han demostrado ser sitios de alta
producción primaria que corresponden a grandes poblaciones de fitoplancton (Holligan,
1981). Los frentes influyen en los ecosistemas marinos en todos sus niveles,
directamente o a través de efectos cascada en la cadena trófica (Nieto, 2012), por lo que
Bakun (2006) menciona la importancia de los frentes en los procesos del ecosistema,
dado que cualquier frente que persiste en un periodo significativo, puede ser asociado a
una zona de convergencia y por lo tanto, a la formación de agua de densidad intermedia,
que concentra partículas, además de formar áreas de alta productividad biológica.
Los sistemas satelitales dedicados a estudios oceanográficos, detectan propiedades de
la superficie del mar, como temperatura, color, pendiente o rugosidad. Es por ello, que
cualquier parámetro oceanográfico que se quiera medir, debe producir una variación en
algunas de estas cuatro propiedades superficiales (Canton Garbin y Hernández Guerra,
1991).
La teledetección del medio marino estudia el desarrollo y la distribución de los procesos
oceánicos, por lo que la frecuencia, el tamaño y el tiempo de existencia de los frentes
12
pueden ser estudiados en series de tiempo de imágenes satelitales para lograr una mejor
comprensión de este tipo de fenómenos (Diehl et al., 2002). La segmentación es el
proceso de dividir una imagen en regiones cuyos pixeles poseen atributos comunes
(Crespo y Ochoa, 2009), su objetivo es localizar objetos y los límites de estos (bordes).
Los bordes detectados en las imágenes de temperatura superficial del mar representan
los frentes térmicos, objeto de estudio de este trabajo. La detección de bordes es uno de
los problemas más comunes en el análisis de imágenes digitales. Es a menudo la primera
etapa importante en la segmentación, ya que se puede utilizar para simplificar las
imágenes para el estudio de los objetos en ella. Compensaciones entre detectabilidad
del borde, la sensibilidad al ruido y la eficiencia computacional siempre están
involucradas en la selección del operador de borde apropiado para una aplicación
específica (Holyer y Peckinpaugh, 1989).
El Golfo de California (GC) es el único mar interno del Pacífico Oriental, la región
pesquera más importante de México y uno de los ecosistemas marinos más observados
por el sector de conservación a nivel mundial (Lluch-Cota et al., 2007). En el GC no se
han realizado estudios sobre el análisis de persistencia e intensidad de los frentes
oceánicos. En el presente trabajo de tesis se presenta un algoritmo de detección de
frentes (Crecimiento de Regiones) para determinar la persistencia e intensidad en el GC
de frentes térmicos entre los años 2011-2014.
13
1.1 Planteamiento del problema
Los frentes oceánicos son de suma importancia a nivel físico y biológico ya que son sitios
en donde se ha demostrado una alta productividad primaria (Holligan, P. M., 1981;
Ullman y Cornillon, 1999; Oram et al., 2008). Los avances en la oceanografía por satélite
han dado como resultado la comprensión e importancia de la detección de frentes
oceánicos, observando su variabilidad en el espacio y el tiempo (Davidovich, 2014). La
identificación de frentes oceánicos sin un procedimiento automatizado sobre un gran
número de imágenes satelitales es una tarea, subjetiva y en la que se invierte mucho
tiempo. El objetivo de los algoritmos utilizados para la detección de frentes, es la
obtención de estadísticas de la imagen, para determinar la ubicación de los frentes. En
el GC no existen trabajos sobre el análisis de frentes oceánicos que determinen su
persistencia e intensidad por medio de imágenes satelitales. Es por esto que en el
presente trabajo se propuso, determinar la persistencia e intensidad de los frentes
oceánicos en el GC entre los años 2011 y 2014, utilizando datos satelitales de TSM de
1 km de resolución, así como desarrollar un algoritmo para la detección de frentes basado
en el crecimiento de regiones.

14
1.2 Hipótesis
La segmentación por medio del algoritmo de crecimiento de regiones en imágenes
satelitales de temperatura superficial del mar, permite determinar eficientemente la
persistencia e intensidad de frentes oceánicos.
1.3 Objetivo General
Determinar la persistencia e intensidad de frentes oceánicos en el Golfo de California,
implementando un algoritmo de segmentación basado en crecimiento de regiones en
imágenes diarias de TSM, para el periodo 2011-2014.
1.4 Objetivos Específicos
Calibrar algoritmos de detección de bordes en imágenes sintéticas.
Aplicar los algoritmos de Canny, Cayula-Cornillon y crecimiento de regiones
para la detección de frentes en imágenes de TSM.
Comparar el algoritmo de crecimiento de regiones con los algoritmos de
Cayula-Cornillon y Canny.
Analizar la persistencia e intensidad de los frentes en series de tiempo de
datos satelitales de TSM.
Aplicar un algoritmo para el cálculo de distancia de los frentes obtenidos a las
estaciones de muestreo de cruceros oceanográficos contemporáneos.
15
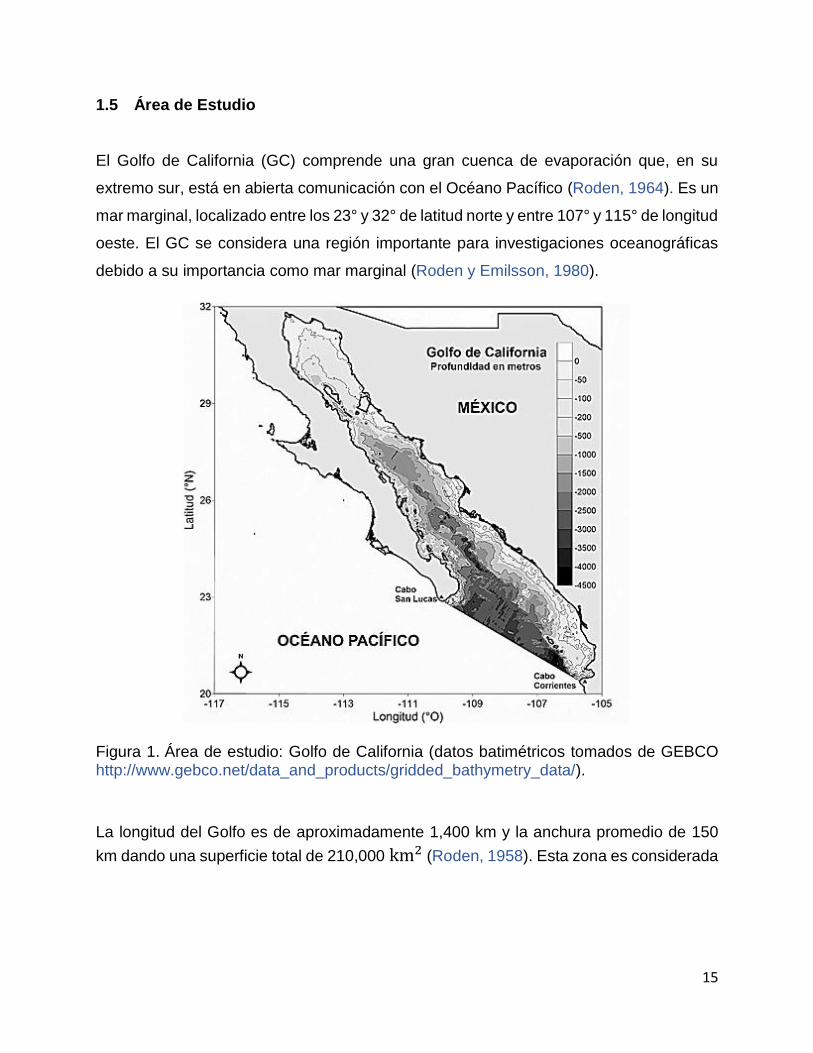
1.5 Área de Estudio
El Golfo de California (GC) comprende una gran cuenca de evaporación que, en su
extremo sur, está en abierta comunicación con el Océano Pacífico (Roden, 1964). Es un
mar marginal, localizado entre los 23° y 32° de latitud norte y entre 107° y 115° de longitud
oeste. El GC se considera una región importante para investigaciones oceanográficas
debido a su importancia como mar marginal (Roden y Emilsson, 1980).
Figura 1. Área de estudio: Golfo de California (datos batimétricos tomados de GEBCO http://www.gebco.net/data_and_products/gridded_bathymetry_data/).
La longitud del Golfo es de aproximadamente 1,400 km y la anchura promedio de 150
km dando una superficie total de 210,000 km2 (Roden, 1958). Esta zona es considerada
16
de gran interés en aspectos oceanográficos y meteorológicos, por su similitud con otros
mares como el Mar Rojo y el Mar Adriático (Badan-Dangon et al., 1991).
La batimetría del Golfo consiste de una serie de cuencas profundas separadas entre sí,
con profundidades que varían desde un promedio de 200 m en la cabeza a 3600 m en la
boca (Jiménez et al, 2005).
El efecto del Océano Pacifico sobre el clima del Golfo es en gran medida reducido por
una cadena casi ininterrumpida de montañas, de 1 a 3 km de altura, de la península de
Baja California. Por tanto, el clima del Golfo de California es más continental que
oceánico, (Hernández, 1923; Roden, 1964). Es cálido y árido, típico de regiones
desérticas. Las condiciones más tropicales ocurren durante el verano cuando los vientos
prevalecientes introducen aire húmedo del sur (Merrifield et al., 1989; Torres-Orozco,
1993).
Una de las características más importantes de la circulación atmosférica es su variación
espacial, la cual genera vorticidad atmosférica que se transfiere al mar mediante flujos
de momentum capaces de crear turbulencia y giros en la columna de agua (Parés-Sierra
et al., 2003; Jiménez et al, 2005). En el golfo se presenta principalmente a lo largo de su
eje longitudinal, a causa de la elevada topografía a ambos lados de éste (Badan-Dangon
et al., 1991; Jiménez et al., 2005).
En términos generales, la circulación superficial del GC se caracteriza por flujos hacia el
sur en invierno y hacia el norte en verano; presentando diferentes direcciones en
primavera y presencia de giros anticiclónicos en algunas regiones del Golfo. En otoño no
hay un patrón claro de circulación, por eso es considerado como un periodo de transición
entre los patrones de circulación de verano a invierno (Torres-Orozco, 1993). La
circulación de las aguas superficiales del Golfo está muy ligada al patrón de vientos;
siendo estos principalmente del noroeste en invierno y del sureste en verano, generando
a su vez surgencias estacionales que se presentan a lo largo de ambas costas del GC
(Roden, 1984).
Torres-Orozco (1993), realizó una clasificación de las masas de agua del GC en términos
volumétricos. En el promedio anual más del 70% del volumen total del GC es ocupado

17
por masas de agua más profunda: el Agua Intermedia del Pacifico (AIP) contribuye con
el 33% y el Agua Profunda del Pacifico (APP) con el 41%. El volumen restante es
ocupado por tres masas de agua, de éste el 19% corresponde al Agua Subsuperficial
Subtropical (ASsSt), el 6% el Agua del Golfo (AGC) y el 1% el Agua Superficial Ecuatorial
(ASE). El Agua de la Corriente de California (ACC) no es detectada en el análisis
volumétrico, lo que sugiere que su volumen es muy pequeño o nulo.
2 ESTADO DEL CAMPO DEL ARTE
2.1 Percepción remota y procesamiento de imágenes
La percepción remota se define como la técnica para información útil sobre los objetos,
áreas o fenómenos bajo investigación, mediante análisis de datos adquiridos por
dispositivos, que no están en contacto físico con éstos. La percepción remota o
teledetección, permite adquirir imágenes de la superficie terrestre con sensores
instalados en plataformas espaciales, debido a que entre la Tierra y el sensor existe una
interacción energética, ya sea por reflexión de la energía solar o por emisión propia. A
su vez, es preciso que la energía que es recibida por el sensor, se transmita a la
superficie terrestre, donde la señal transmitida pueda almacenarse y en última instancia,
ser interpretada para una determinada aplicación (Chuvieco, 1995).
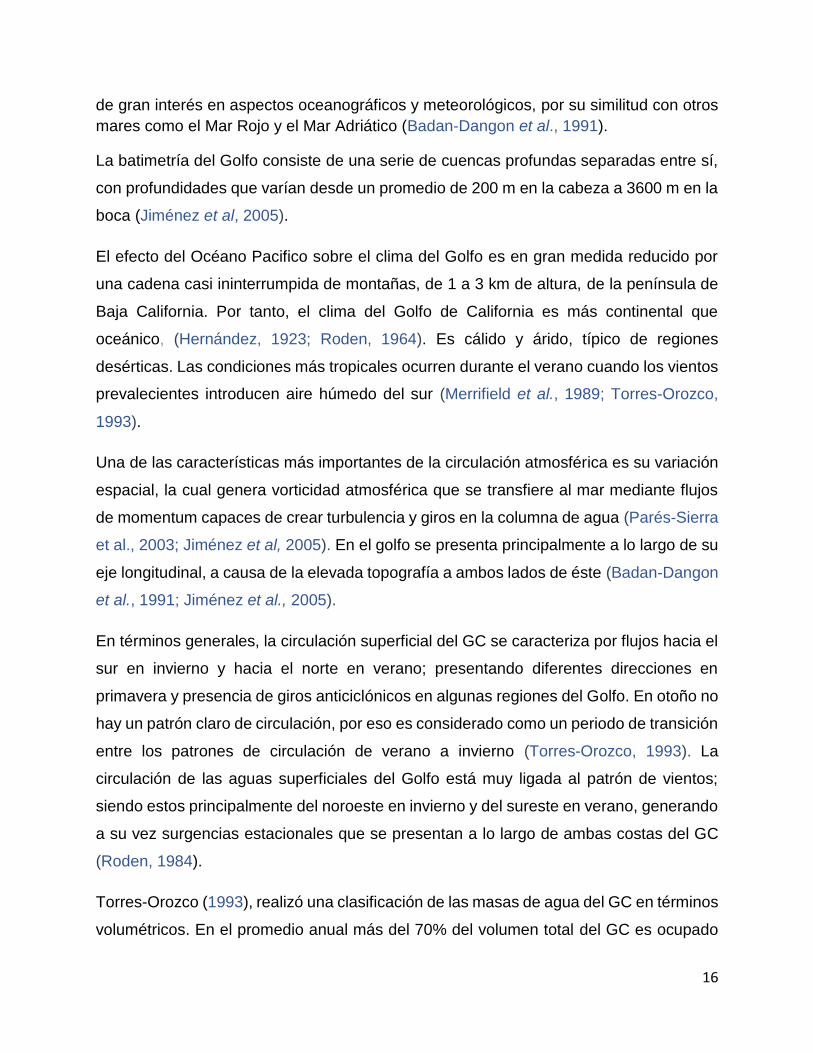
El procesamiento de imágenes juega un papel muy importante dentro de la percepción
remota, debido a que su finalidad es la de estudiar un objeto, o estructuras representadas
en la imagen como son los frentes oceánicos. Se puede definir como la manipulación de
los valores digitales contenidos en una imagen con el fin de corregir, perfeccionar y/o
extraer los rasgos característicos de ésta (Silva et al., 2002). En este proceso se
distinguen varias etapas que van desde la adquisición de la imagen por medio de un
sensor remoto, pasando por los algoritmos de segmentación, los cuales permiten dividir
la imagen en regiones u objetos cuyos pixeles poseen atributos similares; hasta el
reconocimiento o clasificación en la que se muestran los objetos segmentados, gracias
al análisis de las características que se establecieron previamente para diferenciarlos
(Fig. 2).
18
Figura 2. Etapas en el procedimiento de imágenes digitales, (adaptado de Larcher et al., 2011).
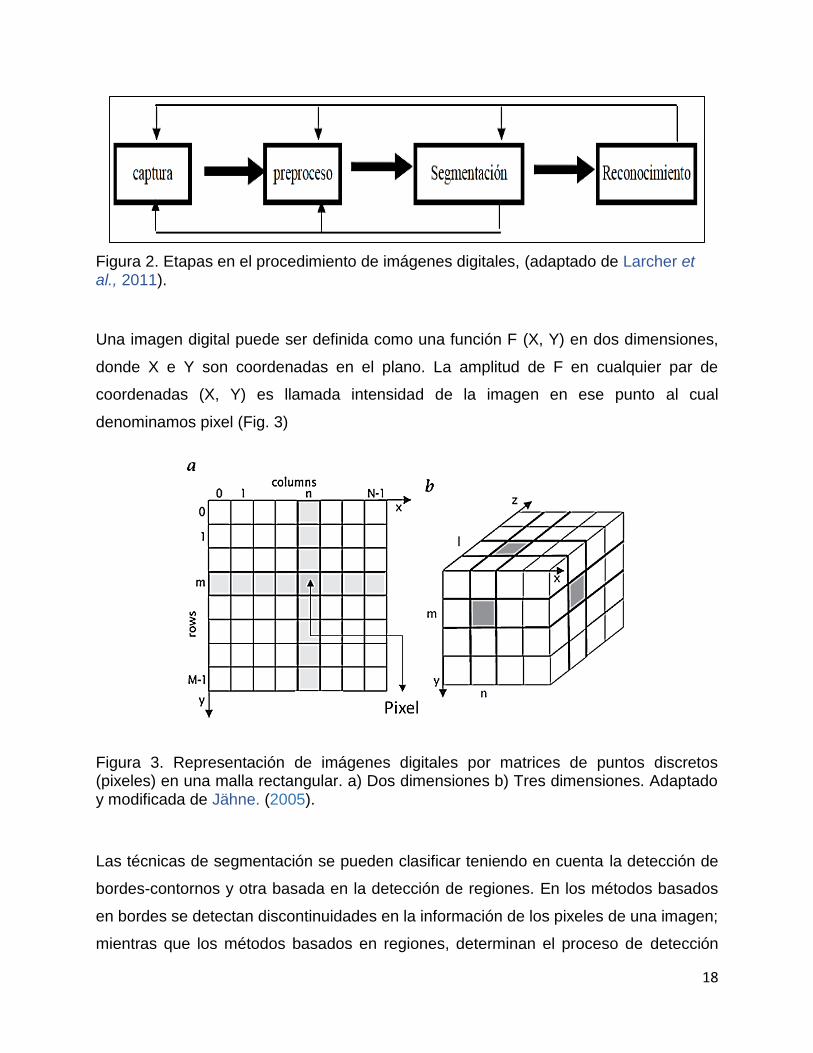
Una imagen digital puede ser definida como una función F (X, Y) en dos dimensiones,
donde X e Y son coordenadas en el plano. La amplitud de F en cualquier par de
coordenadas (X, Y) es llamada intensidad de la imagen en ese punto al cual
denominamos pixel (Fig. 3)
Figura 3. Representación de imágenes digitales por matrices de puntos discretos (pixeles) en una malla rectangular. a) Dos dimensiones b) Tres dimensiones. Adaptado y modificada de Jähne. (2005).
Las técnicas de segmentación se pueden clasificar teniendo en cuenta la detección de
bordes-contornos y otra basada en la detección de regiones. En los métodos basados
en bordes se detectan discontinuidades en la información de los pixeles de una imagen;
mientras que los métodos basados en regiones, determinan el proceso de detección
19
mediante una medida cuantitativa (umbral) de las propiedades de un grupo conexo de
pixeles (Jaramillo et al., 2010)
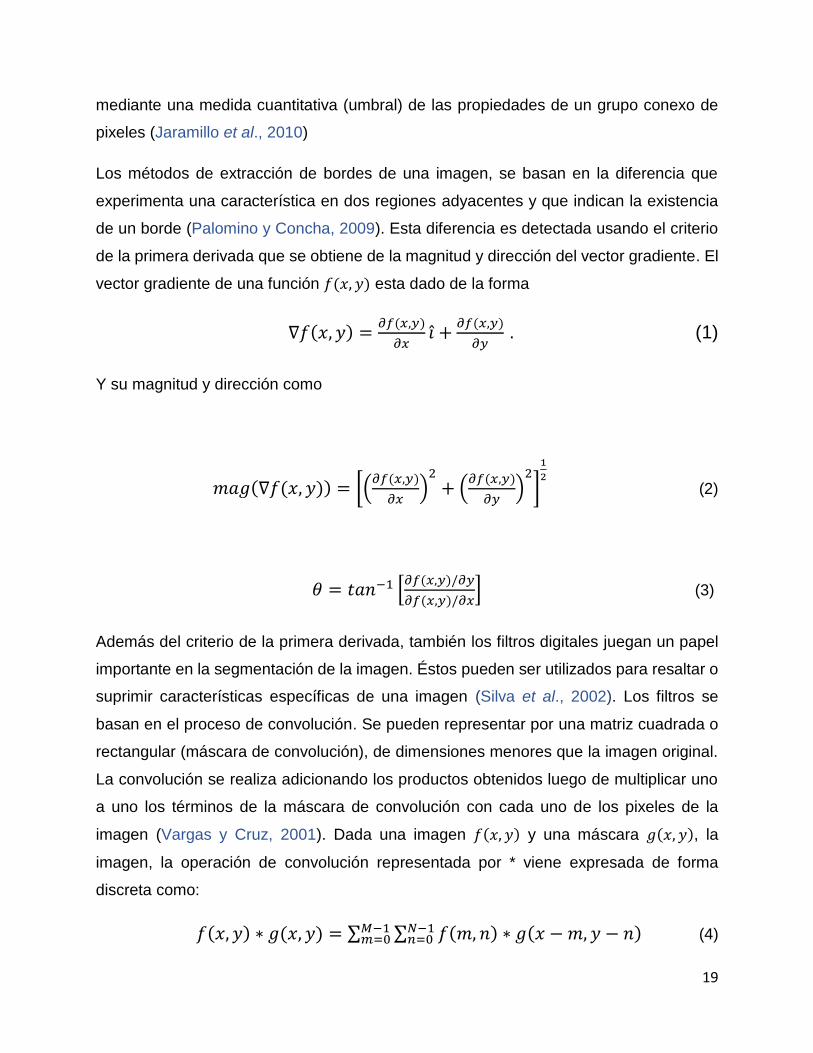
Los métodos de extracción de bordes de una imagen, se basan en la diferencia que
experimenta una característica en dos regiones adyacentes y que indican la existencia
de un borde (Palomino y Concha, 2009). Esta diferencia es detectada usando el criterio
de la primera derivada que se obtiene de la magnitud y dirección del vector gradiente. El
vector gradiente de una función 𝑓(𝑥, 𝑦) esta dado de la forma
∇𝑓(𝑥, 𝑦) =𝜕𝑓(𝑥,𝑦)
𝜕𝑥�̂� +
𝜕𝑓(𝑥,𝑦)
𝜕𝑦 . (1)
Y su magnitud y dirección como
𝑚𝑎𝑔(∇𝑓(𝑥, 𝑦)) = [(𝜕𝑓(𝑥,𝑦)
𝜕𝑥)
2+ (
𝜕𝑓(𝑥,𝑦)
𝜕𝑦)
2
]
1
2
(2)
𝜃 = 𝑡𝑎𝑛−1 [𝜕𝑓(𝑥,𝑦)/𝜕𝑦
𝜕𝑓(𝑥,𝑦)/𝜕𝑥] (3)
Además del criterio de la primera derivada, también los filtros digitales juegan un papel
importante en la segmentación de la imagen. Éstos pueden ser utilizados para resaltar o
suprimir características específicas de una imagen (Silva et al., 2002). Los filtros se
basan en el proceso de convolución. Se pueden representar por una matriz cuadrada o
rectangular (máscara de convolución), de dimensiones menores que la imagen original.
La convolución se realiza adicionando los productos obtenidos luego de multiplicar uno
a uno los términos de la máscara de convolución con cada uno de los pixeles de la
imagen (Vargas y Cruz, 2001). Dada una imagen 𝑓(𝑥, 𝑦) y una máscara 𝑔(𝑥, 𝑦), la
imagen, la operación de convolución representada por * viene expresada de forma
discreta como:
𝑓(𝑥, 𝑦) ∗ 𝑔(𝑥, 𝑦) = ∑ ∑ 𝑓(𝑚, 𝑛) ∗ 𝑔(𝑥 − 𝑚, 𝑦 − 𝑛)𝑁−1𝑛=0
𝑀−1𝑚=0 (4)

20
Donde 𝑥 = 0,1,2, … . , 𝑀 y 𝑦 = 0,1,2, … . , 𝑁
La segmentación de imágenes también puede implementarse mediante el crecimiento
de regiones, algoritmo para extraer regiones de la imagen, las cuales están conectadas
según un criterio predefinido (Coto, 2003). A partir de píxeles iniciales previamente
escogidos, se comienza un proceso iterativo que asigna paso a paso, píxeles vecinos al
píxel inicial con propiedades similares a éste de acuerdo con un criterio de uniformidad
seleccionado (Lira, 2002; Bastarrika y Chuvieco, 2006).
2.2 Técnicas para la detección de frentes
Por más de tres décadas de desarrollo de algoritmos de detección de bordes para el
estudio de frentes oceánicos, estos han utilizado diferentes técnicas para realizar la
detección de este tipo de estructura, lo que ha contribuido a un mejor entendimiento en
otros campos de la oceanografía y la ecología marina. Entre los métodos clásicos se
destacan los operadores gradiente de Sobel, Roberts, Kirsh y Laplacian, los cuales
obedecen al criterio de la primera y segunda derivada para determinar discontinuidades
(Simpson, 1990). Estas técnicas de detección basadas en operadores gradiente son muy
sensibles al ruido en las imágenes, por lo que no son muy adecuadas para la detección
de estructuras de mesoescala (Holyer y Peckinpaugh, 1989; Vásquez et al., 1999). Oram
et al. (2008) utilizaron seis años de datos satelitales de temperatura superficial del mar y
clorofila para determinar frentes en el sureste de la ensenada de California, aplicando el
criterio de la primera derivada con el método de Canny (Canny, 1986).
Cayula y Cornillon (1992, 1995) desarrollan un algoritmo de detección de frentes basado
en el análisis de histogramas, el cual fue utilizado inicialmente para detectar frentes cerca
de las costas de Carolina del Norte en imágenes de TSM. Este algoritmo procesa en dos
partes, una a nivel de ventana y la otra a nivel de toda la imagen, buscando una
bimodalidad en el histograma que indica la presencia de diferentes pixeles con distintas
características de temperatura. Aunque la utilización de una ventana fija lo hace sensible
en la detección de frentes falsos, por lo que Diehl et al. (2001) mejoran el algoritmo
21
utilizando un tamaño de ventana variable determinando la correlación de los datos que
rodean el punto central de la ventana. Otros autores también han trabajado con este
algoritmo para la generación de mapas de frentes (Kahru et al., 1995; Ullman y Cornillon,
1999; Belkin et al., 2009).
Vásquez et al. (1999) diseñaron un método para la detección de estructuras de
mesoescala en imágenes de TSM. Este método se basa en un criterio entrópico,
utilizando la divergencia Jensen-Shannon, y es muy robusto para eliminar el ruido en las
imágenes. El método se evaluó en un conjunto de datos satelitales del Océano Atlántico
y del Mar Mediterráneo, cerca de la zona de la Península Ibérica. Al igual que el algoritmo
de Cayula, éste presenta dificultad debido a la obtención de frentes falsos al delinear
estructuras curvilíneas. Este algoritmo de detección fue mejorado por (Shimada et al.,
2005) y utilizado en secuencias de imágenes de TSM identifican frentes cerca de la costa
de Japón. Los autores de ese trabajo utilizaron imágenes libres de nubosidad de 5 km
de resolución espacial, a las que aplicaron la divergencia de Jensen-Shannon y
operaciones morfológicas en el procesamiento para reducir el número de frentes falsos.
Chang y Cornillon (2013), aplicaron dos algoritmos de detección de frentes oceánicos, el
de Cayula y Cornillon (1995) y el entrópico de Shimada et al. (2005), utilizando datos
satelitales e in situ de TSM de la región entre Nueva York y Las Bermudas. Estos autores,
obtuvieron una mejora significativa en cuanto al número de frentes débiles encontrados
por Shimada et al. (2005).
Se destacan al igual otros métodos que combinan diferentes técnicas, como la detección
de frentes de temperatura basados en gradientes por medio del análisis de isotermas
(Davidovich, 2013). Este algoritmo detecta un frente como una secuencia de isotermas
que tienen características similares. La detección de frentes mediante esta técnica se
implementó para la Corriente del Golfo.
Ping et al. (2014), desarrollaron una técnica en imágenes de TSM llamada BOFD
(Detección de Frentes Oceánicos Bayesiano) la cual combina el algoritmo de Sobel con
la teoría bayesiana para establecer la ocurrencia de frentes falsos. Además, utiliza un
umbral que es determinado por el histograma acumulativo de gradiente y es comparado

22
con el algoritmo de Canny, mostrando ser un algoritmo que no solo suprime el ruido, sino
que también detecta frentes continuos.
3 DATOS Y MÉTODOS
3.1 Datos
La utilización de sensores remotos permite estudiar estructuras oceánicas, debido a que
es posible obtener una gran cantidad de datos a diversas escalas espacio-temporales.
En este trabajo se utilizan imágenes satelitales de TSM obtenidas con diferentes tipos
de sensores, las cuales se describen a continuación.
3.1.1 Imágenes satelitales G1SST
Son datos diarios globales de la temperatura superficial del mar, con 1 km de resolución
espacial, producidas por el grupo JPL/ROMS, aplicando el algoritmo de Chao et al.
(2009). Éste interpola datos de varios sensores, así como datos in situ. Estas imágenes
están libres de nubosidad.
Tabla 1. Sensores utilizados por Chao et al. (2009) para generar imágenes G1SST.
Satélite Sensor Tipo de sensor Resolución
NOAA AVHRR Infrarrojo 2km
ENVISAT AATSR Infrarrojo 1km
TERRA MODIS Visible/Infrarrojo 1km
AQUA MODIS Visible/Infrarrojo 1km
METOP GOES Infrarrojo 6km
AQUA AMSR-E Micro ondas 25km
La Tabla 1 presenta los sensores con los que se obtienen los datos para generar
imágenes G1SST con el algoritmo de Chao et al. (2009). El algoritmo también incorpora
datos in situ de la temperatura superficial del mar del GODAE (Global Ocean Data

23
Assimilation Experiment), datos de miles de barcos y mediciones de boyas de la TSM.
Los datos G1SST están disponibles a partir del 9 de junio de 2010
(http://upwell.pfeg.noaa.gov/erddap/griddap/jplG1SST)
3.1.2 Datos del crucero oceanográfico
Se utilizaron la ubicación de 59 estaciones de muestreo del crucero oceanográfico
BIPOGN-1406 realizado del 1 al 18 de junio del 2014, en el Golfo de California.
3.2 Métodos
El método que se utilizó en este trabajo se presenta a continuación según los objetivos
trazados.
3.2.1 Calibración de algoritmos en imágenes sintéticas
Se generaron imágenes sintéticas (512 × 512 pixeles) caracterizando valores de TSM
con diferentes gradientes (0.5, 1.0, 1.5 y 2.0) para llevar a cabo la detección de bordes y
medir sensibilidad de los algoritmos ante los gradientes de la imagen
Figura 4. Generación de imagen sintética.
24
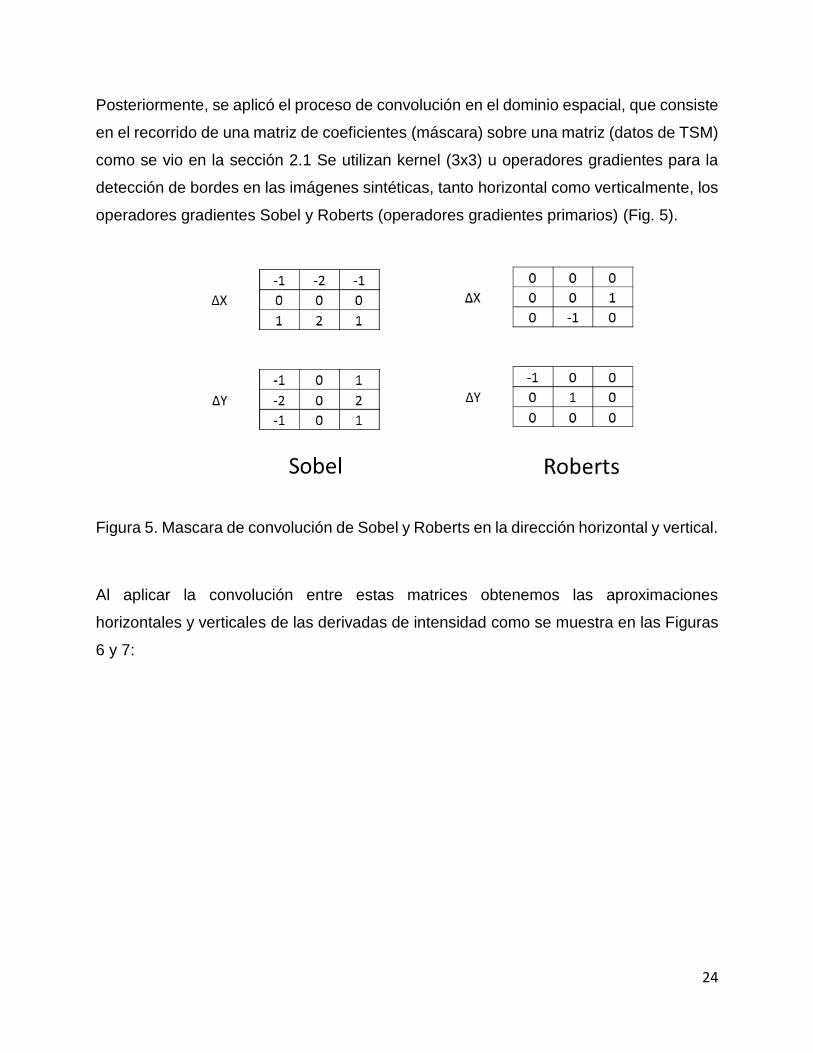
Posteriormente, se aplicó el proceso de convolución en el dominio espacial, que consiste
en el recorrido de una matriz de coeficientes (máscara) sobre una matriz (datos de TSM)
como se vio en la sección 2.1 Se utilizan kernel (3x3) u operadores gradientes para la
detección de bordes en las imágenes sintéticas, tanto horizontal como verticalmente, los
operadores gradientes Sobel y Roberts (operadores gradientes primarios) (Fig. 5).
Figura 5. Mascara de convolución de Sobel y Roberts en la dirección horizontal y vertical.
Al aplicar la convolución entre estas matrices obtenemos las aproximaciones
horizontales y verticales de las derivadas de intensidad como se muestra en las Figuras
6 y 7:

25
Figura 6. Detección de bordes en imágenes sintéticas utilizando el operador Roberts.
En la Figura 6 se muestra la detección de bordes obtenida con el operador de Roberts.
La magnitud de los gradientes se indica en la barra de color.
Figura 7. Detección de borde en imágenes sintéticas utilizando el operador Sobel.
26
La figura 7 muestra la detección de bordes con el operador de Sobel el cual es más
robusto que el operador Roberts debido a que define muy bien los bordes tanto en la
dirección horizontal y vertical. Los diferentes gradientes se observan en la barra de color.
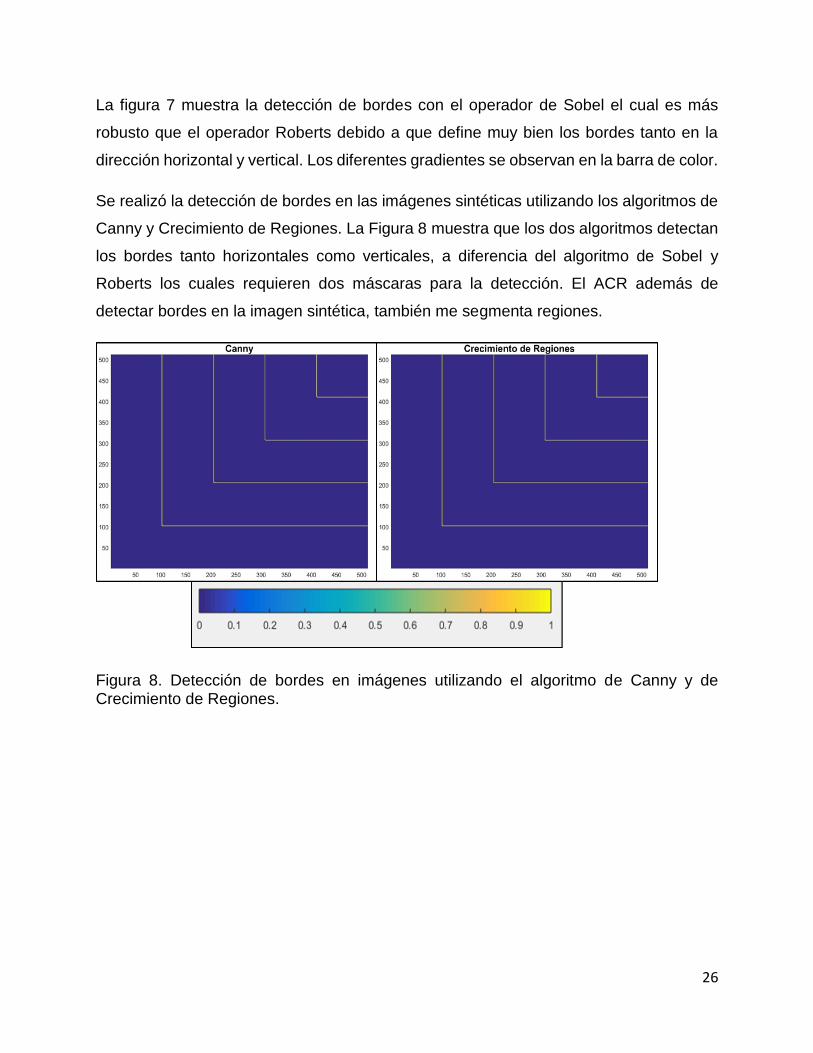
Se realizó la detección de bordes en las imágenes sintéticas utilizando los algoritmos de
Canny y Crecimiento de Regiones. La Figura 8 muestra que los dos algoritmos detectan
los bordes tanto horizontales como verticales, a diferencia del algoritmo de Sobel y
Roberts los cuales requieren dos máscaras para la detección. El ACR además de
detectar bordes en la imagen sintética, también me segmenta regiones.
Figura 8. Detección de bordes en imágenes utilizando el algoritmo de Canny y de Crecimiento de Regiones.

27
3.2.2 Detección de frentes en imágenes de temperatura superficial del mar.
La Figura 9 muestra el diagrama conceptual generar para el tratamiento de los datos.
Los algoritmos fueron programados en MATLAB.
Figura 9. Diagrama conceptual para la detección de frentes en imágenes de TSM G1SST.
Se descargaron datos de temperatura superficial del mar G1SST en formato .mat.
Se aplicó un filtro de suavizado a los datos de TSM, con el fin de reducir la
variación local. En este paso se utilizó el filtro de mediana con la función
medfilt2 la cual se describe en la Tabla 2. Este filtro recorre cada pixel de la
imagen de TSM; remplazando su valor por la mediana de los 9 valores (8 vecinos
y el pixel central). La mediana se calcula ordenando los nueve valores y
seleccionando el valor central, Se eligió este filtro porque no promedia los valores
de temperatura, como lo hace el filtro de media.
28
Se realiza la detección de frentes utilizando el algoritmo de Canny el cual se basa
principalmente en la utilización de máscaras de convolución y el criterio de la
primera derivada. Este algoritmo se ejecuta en tres pasos; el cálculo de la
magnitud y dirección del vector gradiente en cada pixel, el adelgazamiento del
ancho de los bordes y la reducción de aparición de contornos falsos (Canny, 1986;
Rebaza, 2007). En esta etapa se utilizó la función edge.
Se detectan los frentes con el algoritmo de Cayula-Cornillon (1992), modificado
por Diehl et al. (2002), descrito en el apartado 2.2. Para esto se utiliza la función
edgedetect la cual genera una imagen binaria donde los bordes están
representados con el valor de 1.
Detección de frentes utilizando el algoritmo de segmentación basado en
crecimiento de regiones (desde ahora ACR); el cual agrupa pixeles según un
criterio de similitud predefinido (Alfaro y Mendoza, 2006). Si representamos la
región de la imagen completa como 𝑅 , podemos ver la segmentación como el
proceso que divide 𝑅 en 𝑛 subregiones 𝑅1, 𝑅2, 𝑅3, … , 𝑅𝑛 tal que:
1. ⋃ 𝑅𝑖 = 𝑅𝑛𝑖=1 .
2. 𝑅𝑖 es una región conexa, 𝑖 = 1,2,3, … , 𝑛.
3. 𝑅𝑖 ∩ 𝑅𝑗 = ∅, ∀ 𝑖, 𝑗, 𝑖 ≠ 𝑗.
4. 𝑃(𝑅𝑖) = VERDADERO
5. 𝑃(𝑅𝑖 ∪ 𝑅𝑗) = FALSO, ∀ 𝑖, 𝑗, 𝑖 ≠ 𝑗.
Donde 𝑃(𝑅𝑖) es un predicado lógico (umbral) definido sobre los pixeles en el
conjunto 𝑅𝑖 .y ∅ denota el conjunto vacío. Con estas implicaciones tenemos que
todo pixel debe pertenecer a una región, además que toda región en la imagen
debe ser conexa y también debe ser totalmente disyunta, es decir que un pixel
pertenezca a una sola región.
Se desarrolló el algoritmo de crecimiento de regiones considerando las siguientes
etapas:
1. Codificación de la función RegionGrowing Ésta recibe como parámetro
de entrada la imagen suavizada de TSM y genera como resultado dos
matrices, una binaria conteniendo los frentes y otra con las regiones

29
etiquetadas. El procedimiento inicia eligiendo aleatoriamente la posición de
un pixel (x,y) de los datos de TSM, el cual se denomina pixel semilla (𝑃𝑠).
El pixel seleccionado se compara secuencialmente con sus ocho vecinos
en el sentido de las manecillas del reloj, para determinar si:
| 𝑃𝑖 - 𝑃𝑠 | ≤ sd, donde sd es el umbral y 𝑃𝑖 es un vecino del pixel semilla.
2. Las coordenadas de los pixeles vecinos que cumplan la condición descrita
anteriormente, se agregan en una lista, de donde una vez completado el
primer ciclo, cada uno será evaluado, de esta forma se repetirá el proceso
para cada elemento de la lista. Cuando la lista queda vacía, significa que
una región en particular dejó de crecer y se vuelve a elegir otro pixel semilla.
Para llevar a cabo este procedimiento se diseñó la función
elementos_lista (Tabla 2) que recibe parámetros de la posición del
pixel semilla (renglón y columna al cual pertenece) el valor del pixel semilla
(md) y el valor del umbral a utilizar (sd). Esta función genera una lista con
los vecinos que han sido evaluados y cumplen con la condición para hacer
crecer una región. Una lista es generada durante el proceso de crecimiento
de cada región de la imagen.
3. Los pixeles pertenecientes a una región son etiquetados con un número
consecutivo que identifica cada región generada. Esta matriz de regiones
es del mismo tamaño que la matriz de entrada (de TSM).
Tabla 2. Funciones utilizadas para la detección de frentes, utilizando ACR.
Función Descripción
medfil2 Aplica un filtro de mediana a la matriz de entrada TSM
elementos_lista Genera una lista con la ubicación de los pixeles vecinos
del pixel semilla que han sido evaluados.
edgecre Realiza la detección de bordes de la matriz que contiene las regiones etiquetadas.
RegionGrowin Función principal que ejecuta el ACR, y contiene a las
funciones anteriores

30
3.2.3 Evaluación y comparación de algoritmos
Se evaluaron y compararon los algoritmos de crecimiento de regiones (ACR), el de
Cayula-Cornillon (1992) y el de Canny (1986) utilizando datos de temperatura superficial
del mar (G1SST) en seis regiones costeras del mundo (1, Frentes al Golfo de Ulloa (GU);
2, Boca del golfo de california (GC); 3, Golfo de Tehuantepec; 4, Corriente del Golfo en
el Atlántico occidental; 5, Patagonia y 6, Costas de Japón) (Fig. 10).
Figura 10. Zonas utilizadas para comparar los algoritmos de Cayula-Cornillon, Canny y ACR.
Estas regiones fueron seleccionadas porque han sido estudiadas por investigadores que
han aplicado algoritmos de detección de frentes oceánicos en imágenes de satélite.
Se aplicaron los tres algoritmos de detección de frentes oceánicos a imágenes G1SST,
a las seis zonas descritas en la Tabla 3:

31
Tabla 3. Descripción de las zonas utilizadas para comparar los algoritmos de Canny, Cayula-Cornillon y ACR.
ZONA LATITUD LONGITUD FECHA VARIACION.TEMP. (◦C)
1 24 -27N 116 -119O 05/01/2011 16.14 - 18.51
2 20 -23N 109 -112O 05/01/2011 17.14 - 23.53
3 13 -16N 107 -110O 09/09/2010 26.75 - 29.3
4 35 -38N 69 - 72O 23/03/2011 12.26 - 22.76
5 40 -43S 52 -55O 07/02/2011 15.18 - 24.28
6 29 -32N 132 -135E 24/05/2011 17.69 - 21.88
Para la comparación de los algoritmos establecimos cuatro criterios (o métricas) una vez
realizada la detección de frentes. Estas son:
1. Número de pixeles frentes detectados.
2. Número de componentes conexas (pixeles frente contiguos).
3. Número de pixeles frente por cada componente conexa encontrada.
4. Compacidad de las componentes conexas.
Para determinar cada uno de los criterios anteriores se construyó una función RegConex
(Tabla 5). Como parámetro de entrada recibe la imagen binaria obtenida con los
algoritmos de detección de frentes. Se aplica la función bwlabel que recibe la imagen
binaria y el tipo de conectividad que deseamos. Para una imagen binaria se dice que dos
pixeles A(x,y) y B(p,q), cuyos valores en la imagen son 1, están conectados con
conectividad-4 si ambos se encuentran en relación 4-vecinos. De igual manera los
mismos pixeles estarían conectados con conectividad-8 (para nuestro caso) si ambos se
encuentran en relación 8-vecinos (Cuevas et al.,2010), como se observa en la Figura 11.
32
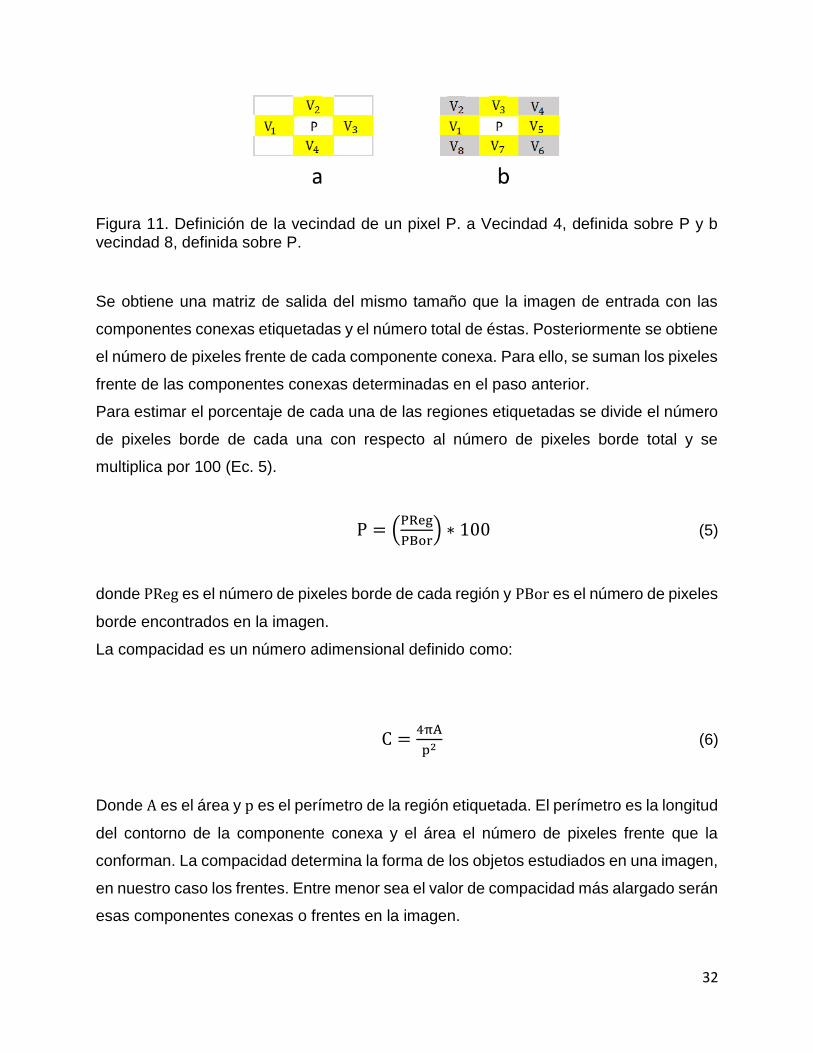
Figura 11. Definición de la vecindad de un pixel P. a Vecindad 4, definida sobre P y b vecindad 8, definida sobre P.
Se obtiene una matriz de salida del mismo tamaño que la imagen de entrada con las
componentes conexas etiquetadas y el número total de éstas. Posteriormente se obtiene
el número de pixeles frente de cada componente conexa. Para ello, se suman los pixeles
frente de las componentes conexas determinadas en el paso anterior.
Para estimar el porcentaje de cada una de las regiones etiquetadas se divide el número
de pixeles borde de cada una con respecto al número de pixeles borde total y se
multiplica por 100 (Ec. 5).
P = (PReg
PBor) ∗ 100 (5)
donde PReg es el número de pixeles borde de cada región y PBor es el número de pixeles
borde encontrados en la imagen.
La compacidad es un número adimensional definido como:
C =4πA
p2 (6)
Donde A es el área y p es el perímetro de la región etiquetada. El perímetro es la longitud
del contorno de la componente conexa y el área el número de pixeles frente que la
conforman. La compacidad determina la forma de los objetos estudiados en una imagen,
en nuestro caso los frentes. Entre menor sea el valor de compacidad más alargado serán
esas componentes conexas o frentes en la imagen.
33
Para cada una de las seis zonas (cuadrante 3°× 3°) se calculó el índice de persistencia
de frentes (IPF), como el número de pixeles-frentes persistentes entre el número de días
en que se determinó la persistencia, como se indica en la ecuación 7:
IPF =No.Pixeles−Frente
No.dias de Persistencia . (7)
Tabla 4. Funciones desarrolladas en MATLAB para la comparación de algoritmos.
Función Descripción
bwLabel Genera una matriz con las componentes conexas
etiquetadas
RegConex
Función principal que contiene la función anterior y genera las métricas establecidas como número de
componentes conexas, compacidad y número de pixeles
34
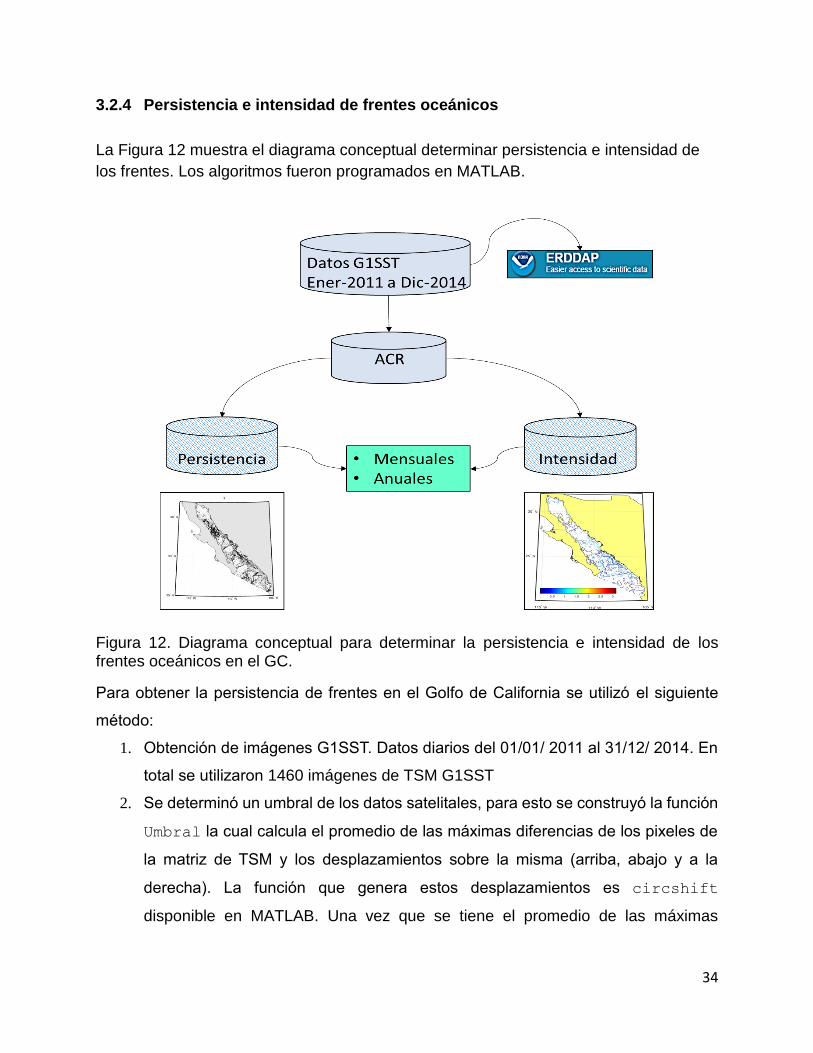
3.2.4 Persistencia e intensidad de frentes oceánicos
La Figura 12 muestra el diagrama conceptual determinar persistencia e intensidad de
los frentes. Los algoritmos fueron programados en MATLAB.
Figura 12. Diagrama conceptual para determinar la persistencia e intensidad de los frentes oceánicos en el GC.
Para obtener la persistencia de frentes en el Golfo de California se utilizó el siguiente
método:
1. Obtención de imágenes G1SST. Datos diarios del 01/01/ 2011 al 31/12/ 2014. En
total se utilizaron 1460 imágenes de TSM G1SST
2. Se determinó un umbral de los datos satelitales, para esto se construyó la función
Umbral la cual calcula el promedio de las máximas diferencias de los pixeles de
la matriz de TSM y los desplazamientos sobre la misma (arriba, abajo y a la
derecha). La función que genera estos desplazamientos es circshift
disponible en MATLAB. Una vez que se tiene el promedio de las máximas
35
diferencias de los datos para el periodo establecido, se grafican por año para
determinar el valor del umbral.
3. Se suavizan los datos aplicando el filtro de mediana utilizando la función
medfilt2 la cual se describió en la sesión 3.2.2.
4. Se realiza la detección de bordes con el ACR, utilizando la función
RegionGrowin, con el valor de las regiones etiquetadas bajo el criterio
establecido en el primer paso, y las matrices binarias generadas de la detección
de borde que son los límites de las regiones etiquetadas. Estos bordes y regiones
se almacenan en matrices de tridimensionales bordes3d y regiones3d
respectivamente.
5. Para la obtención de la persistencia se suma pixel a pixel cada matriz binaria
contenida dentro de bordes3d para cada mes del periodo que se planteó.
Para el cálculo de la intensidad se construyó la función intensity (Tabla 4) que tiene
como parámetro de entrada la matriz de temperatura superficial del mar y la matriz con
las regiones etiquetadas (regiones3d) una vez que se le ha aplicado el ACR.
Posteriormente se encuentran los índices de los pixeles etiquetados en la matriz
regiones3d, y se relacionen con la matriz de TSM; para luego calcular la media y la
diferencia entre las temperaturas promedio de cada región, procedimiento mediante el
cual se obtiene la intensidad de los bordes.
36
3.2.5 Distancia de los frentes obtenidos a las estaciones de muestreo de
cruceros oceanográficos
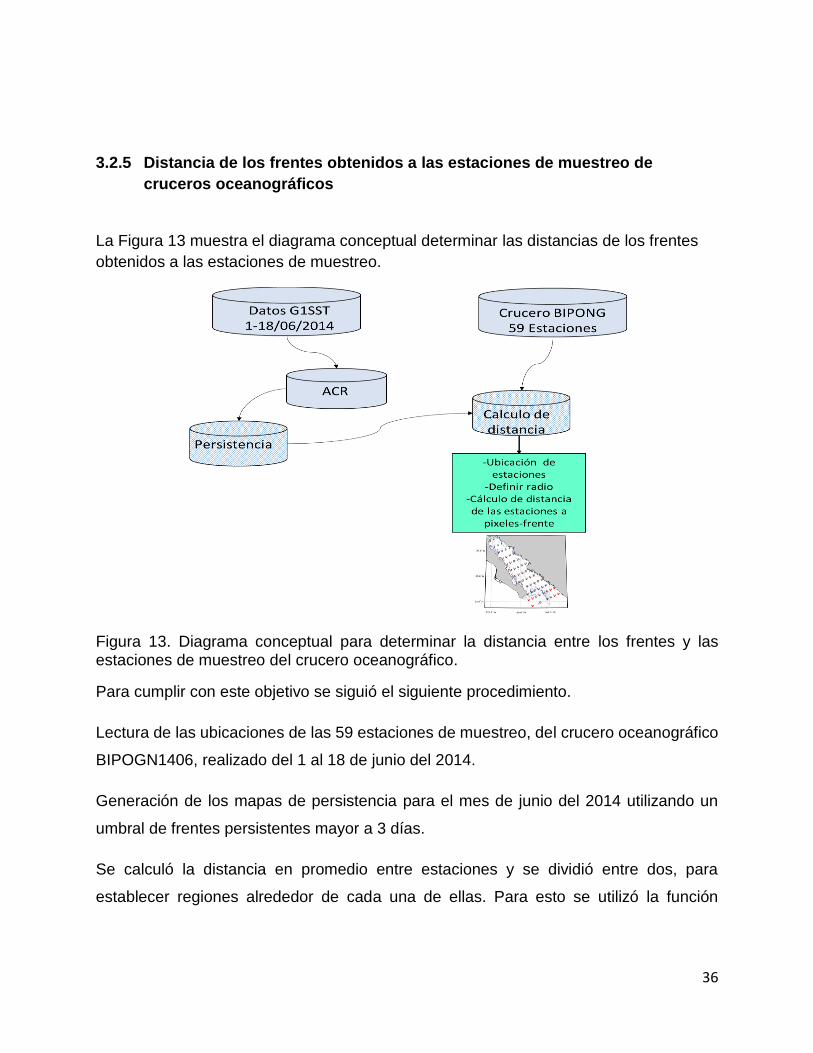
La Figura 13 muestra el diagrama conceptual determinar las distancias de los frentes
obtenidos a las estaciones de muestreo.
Figura 13. Diagrama conceptual para determinar la distancia entre los frentes y las estaciones de muestreo del crucero oceanográfico.
Para cumplir con este objetivo se siguió el siguiente procedimiento.
Lectura de las ubicaciones de las 59 estaciones de muestreo, del crucero oceanográfico
BIPOGN1406, realizado del 1 al 18 de junio del 2014.
Generación de los mapas de persistencia para el mes de junio del 2014 utilizando un
umbral de frentes persistentes mayor a 3 días.
Se calculó la distancia en promedio entre estaciones y se dividió entre dos, para
establecer regiones alrededor de cada una de ellas. Para esto se utilizó la función
37
distance que recibe como parámetros las coordenadas de las estaciones de muestreo
así como de cada pixel-frente en el radio de búsqueda.
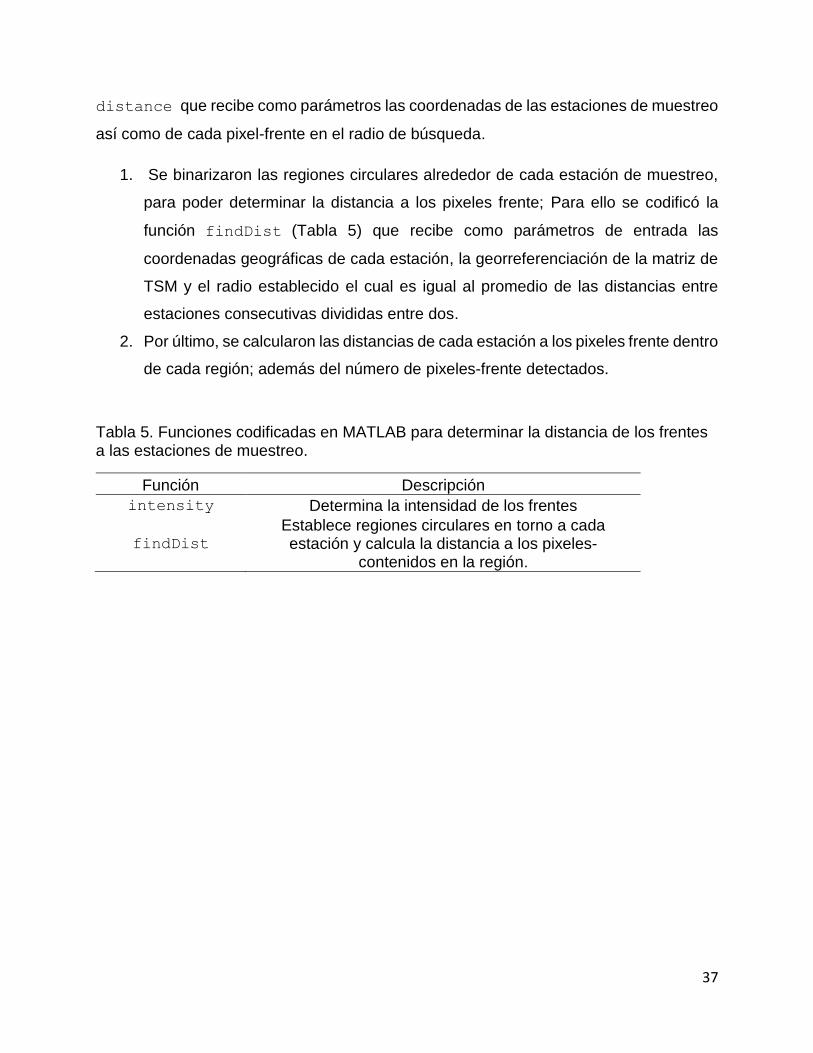
1. Se binarizaron las regiones circulares alrededor de cada estación de muestreo,
para poder determinar la distancia a los pixeles frente; Para ello se codificó la
función findDist (Tabla 5) que recibe como parámetros de entrada las
coordenadas geográficas de cada estación, la georreferenciación de la matriz de
TSM y el radio establecido el cual es igual al promedio de las distancias entre
estaciones consecutivas divididas entre dos.
2. Por último, se calcularon las distancias de cada estación a los pixeles frente dentro
de cada región; además del número de pixeles-frente detectados.
Tabla 5. Funciones codificadas en MATLAB para determinar la distancia de los frentes a las estaciones de muestreo.
Función Descripción
intensity Determina la intensidad de los frentes
findDist
Establece regiones circulares en torno a cada estación y calcula la distancia a los pixeles-
contenidos en la región.

38
4 RESULTADOS Y DISCUSIÓN
4.1 Comparación de algoritmos de detección de frentes
En esta sección se muestran los resultados de la comparación de los algoritmos de
Canny, Cayula-Cornillon y ACR; utilizando la imagen G1SST del 2012/05/12 según el
método explicado en 3.2.2. El rango de temperatura en esta imagen es de 14.3°C a
29.3°C (Fig. 14).
Figura 14. Imagen G1SST (2012/05/12) utilizada para la comparación de los algoritmos de frentes oceánicos.
Posteriormente al suavizado de la imagen de TSM se aplicaron los algoritmos de Canny,
Cayula-Cornillon y ACR. Para solucionar el problema de que se generen frentes falsos,
alrededor de la parte continental se dilato la matriz inicial de TSM utilizando la función de
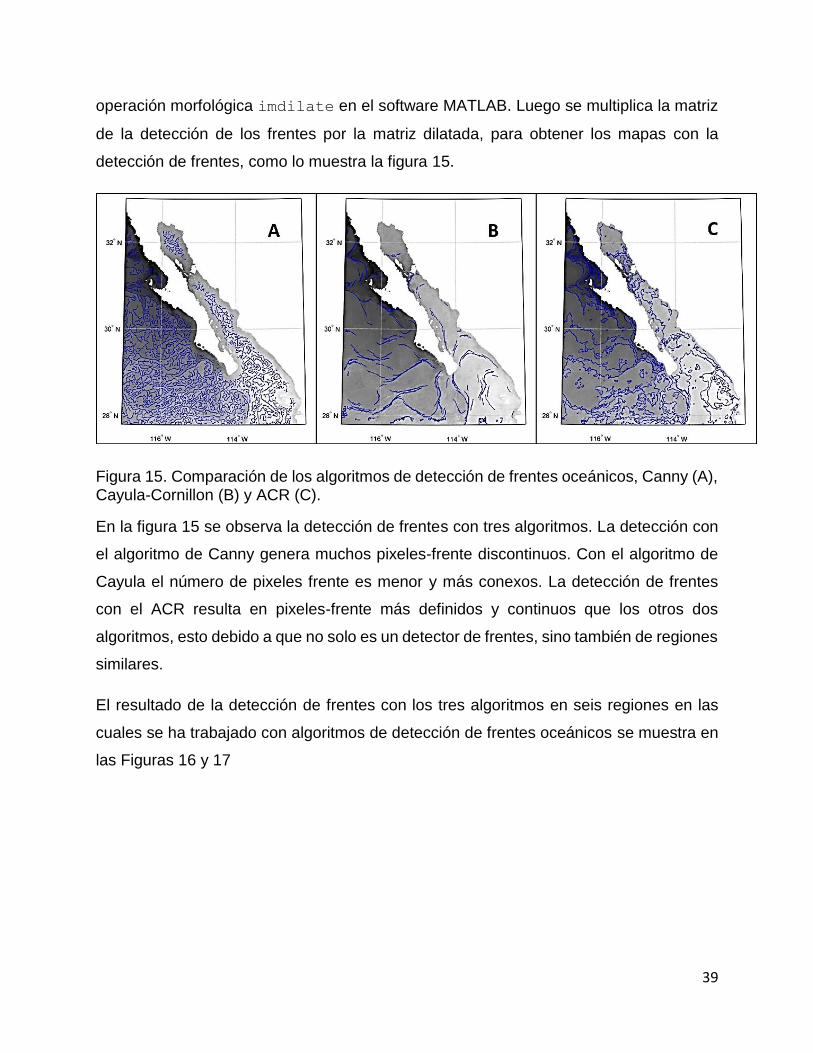
39
operación morfológica imdilate en el software MATLAB. Luego se multiplica la matriz
de la detección de los frentes por la matriz dilatada, para obtener los mapas con la
detección de frentes, como lo muestra la figura 15.
Figura 15. Comparación de los algoritmos de detección de frentes oceánicos, Canny (A), Cayula-Cornillon (B) y ACR (C).
En la figura 15 se observa la detección de frentes con tres algoritmos. La detección con
el algoritmo de Canny genera muchos pixeles-frente discontinuos. Con el algoritmo de
Cayula el número de pixeles frente es menor y más conexos. La detección de frentes
con el ACR resulta en pixeles-frente más definidos y continuos que los otros dos
algoritmos, esto debido a que no solo es un detector de frentes, sino también de regiones
similares.
El resultado de la detección de frentes con los tres algoritmos en seis regiones en las
cuales se ha trabajado con algoritmos de detección de frentes oceánicos se muestra en
las Figuras 16 y 17

40
Figura 16. Comparación de algoritmos de detección de frentes oceánicos en de diferentes regiones: 1. Frente al Golfo de Ulloa; 2. Boca del GC y 3. Golfo de Tehuantepec.
41
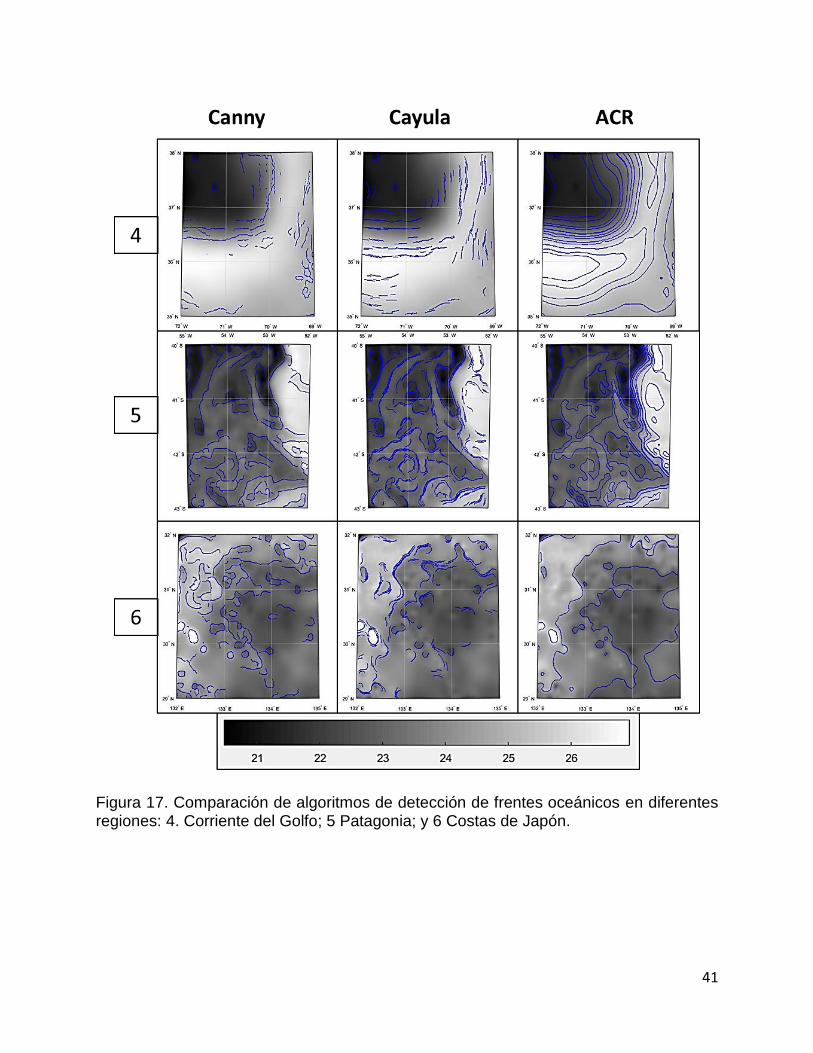
Figura 17. Comparación de algoritmos de detección de frentes oceánicos en diferentes regiones: 4. Corriente del Golfo; 5 Patagonia; y 6 Costas de Japón.
42
En las Figuras 16 y 17 observa que los tres algoritmos realizan una detección diferente
en cuanto al número de pixeles-frente en cada región. El algoritmo de Canny detecta
más frentes, pero con poca conectividad de pixeles, mientras que el algoritmo de Cayula-
Cornillon genera menos frentes que el anterior y las componentes conexas son más
extensas. El ACR detecta menos frentes que el de Cayula-Cornillon y Canny, pero cada
frente muestra un conjunto mayor de pixeles-frente conexos.
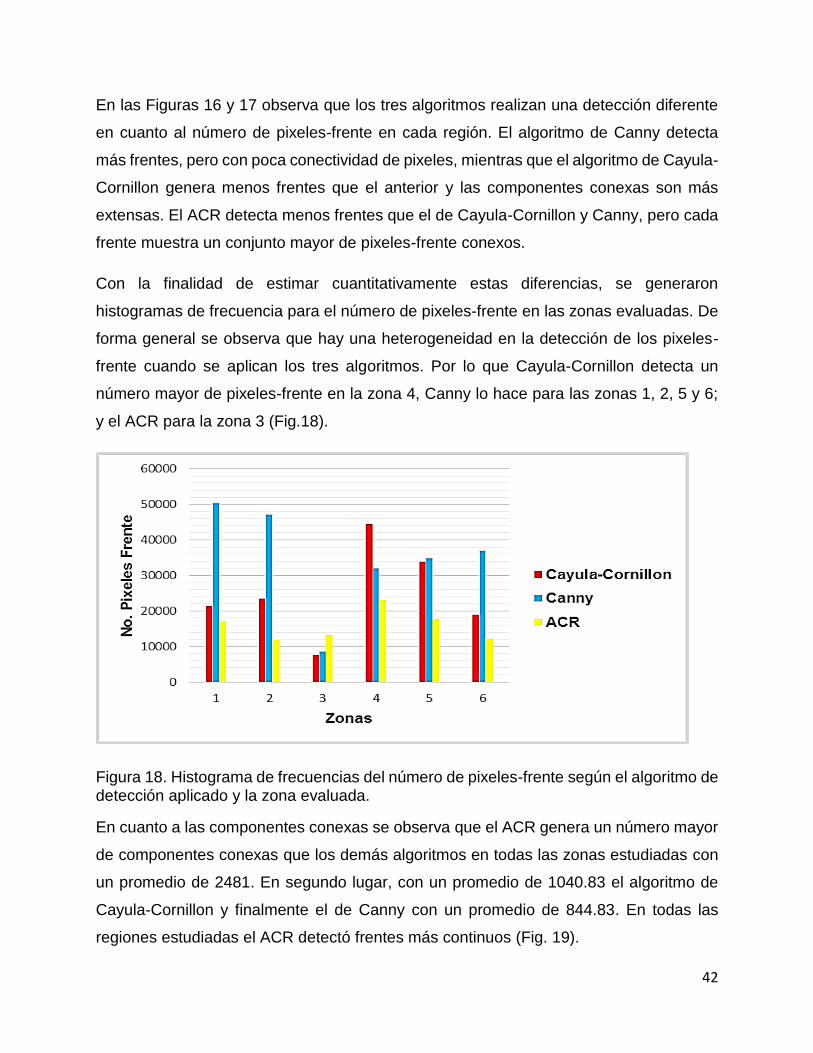
Con la finalidad de estimar cuantitativamente estas diferencias, se generaron
histogramas de frecuencia para el número de pixeles-frente en las zonas evaluadas. De
forma general se observa que hay una heterogeneidad en la detección de los pixeles-
frente cuando se aplican los tres algoritmos. Por lo que Cayula-Cornillon detecta un
número mayor de pixeles-frente en la zona 4, Canny lo hace para las zonas 1, 2, 5 y 6;
y el ACR para la zona 3 (Fig.18).
Figura 18. Histograma de frecuencias del número de pixeles-frente según el algoritmo de detección aplicado y la zona evaluada.
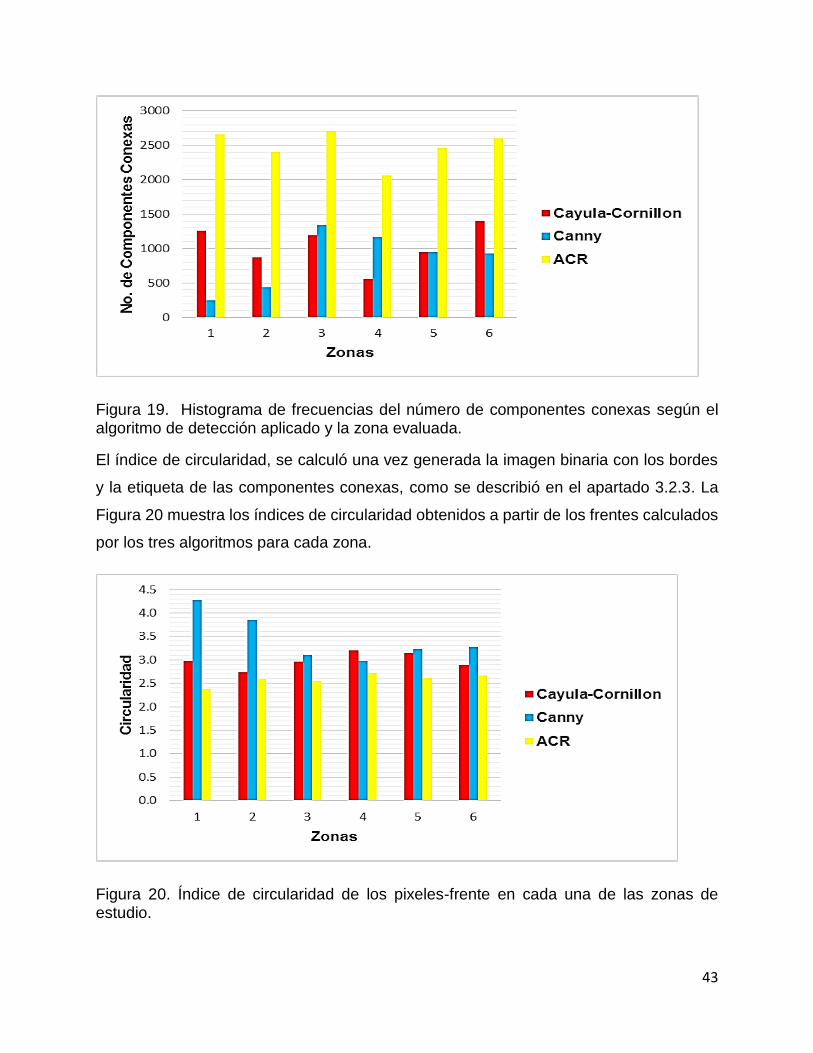
En cuanto a las componentes conexas se observa que el ACR genera un número mayor
de componentes conexas que los demás algoritmos en todas las zonas estudiadas con
un promedio de 2481. En segundo lugar, con un promedio de 1040.83 el algoritmo de
Cayula-Cornillon y finalmente el de Canny con un promedio de 844.83. En todas las
regiones estudiadas el ACR detectó frentes más continuos (Fig. 19).
43
Figura 19. Histograma de frecuencias del número de componentes conexas según el algoritmo de detección aplicado y la zona evaluada.
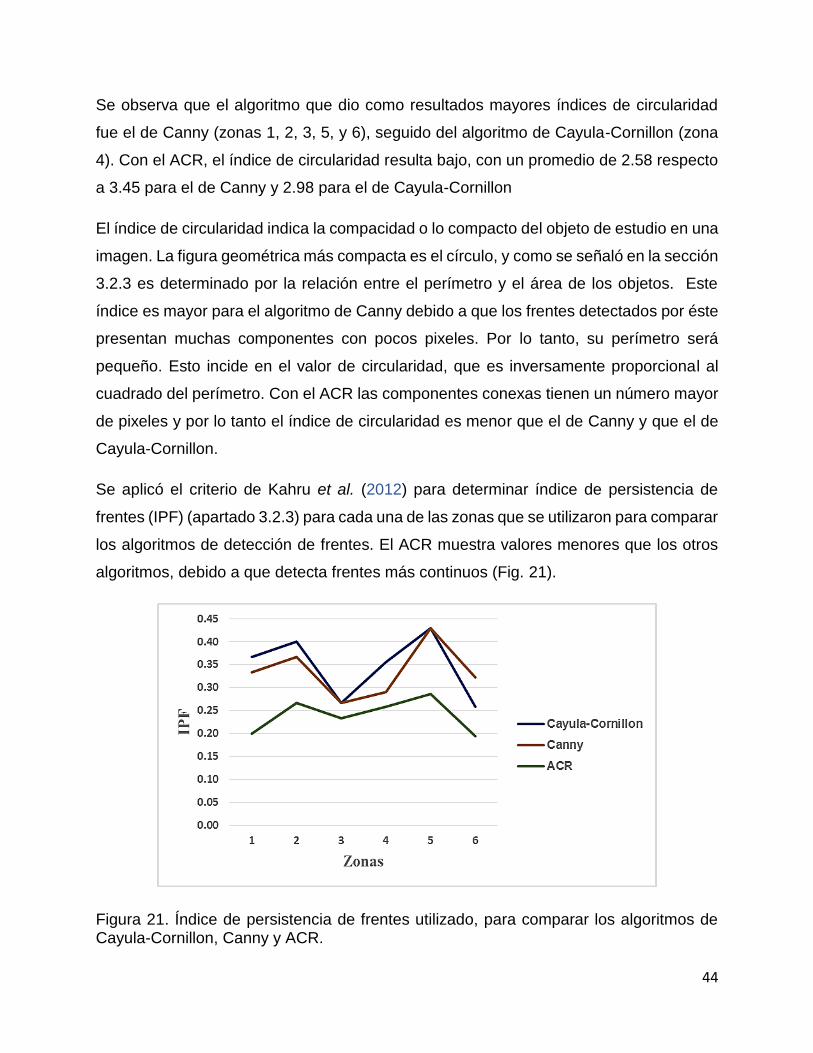
El índice de circularidad, se calculó una vez generada la imagen binaria con los bordes
y la etiqueta de las componentes conexas, como se describió en el apartado 3.2.3. La
Figura 20 muestra los índices de circularidad obtenidos a partir de los frentes calculados
por los tres algoritmos para cada zona.
Figura 20. Índice de circularidad de los pixeles-frente en cada una de las zonas de estudio.
44
Se observa que el algoritmo que dio como resultados mayores índices de circularidad
fue el de Canny (zonas 1, 2, 3, 5, y 6), seguido del algoritmo de Cayula-Cornillon (zona
4). Con el ACR, el índice de circularidad resulta bajo, con un promedio de 2.58 respecto
a 3.45 para el de Canny y 2.98 para el de Cayula-Cornillon
El índice de circularidad indica la compacidad o lo compacto del objeto de estudio en una
imagen. La figura geométrica más compacta es el círculo, y como se señaló en la sección
3.2.3 es determinado por la relación entre el perímetro y el área de los objetos. Este
índice es mayor para el algoritmo de Canny debido a que los frentes detectados por éste
presentan muchas componentes con pocos pixeles. Por lo tanto, su perímetro será
pequeño. Esto incide en el valor de circularidad, que es inversamente proporcional al
cuadrado del perímetro. Con el ACR las componentes conexas tienen un número mayor
de pixeles y por lo tanto el índice de circularidad es menor que el de Canny y que el de
Cayula-Cornillon.
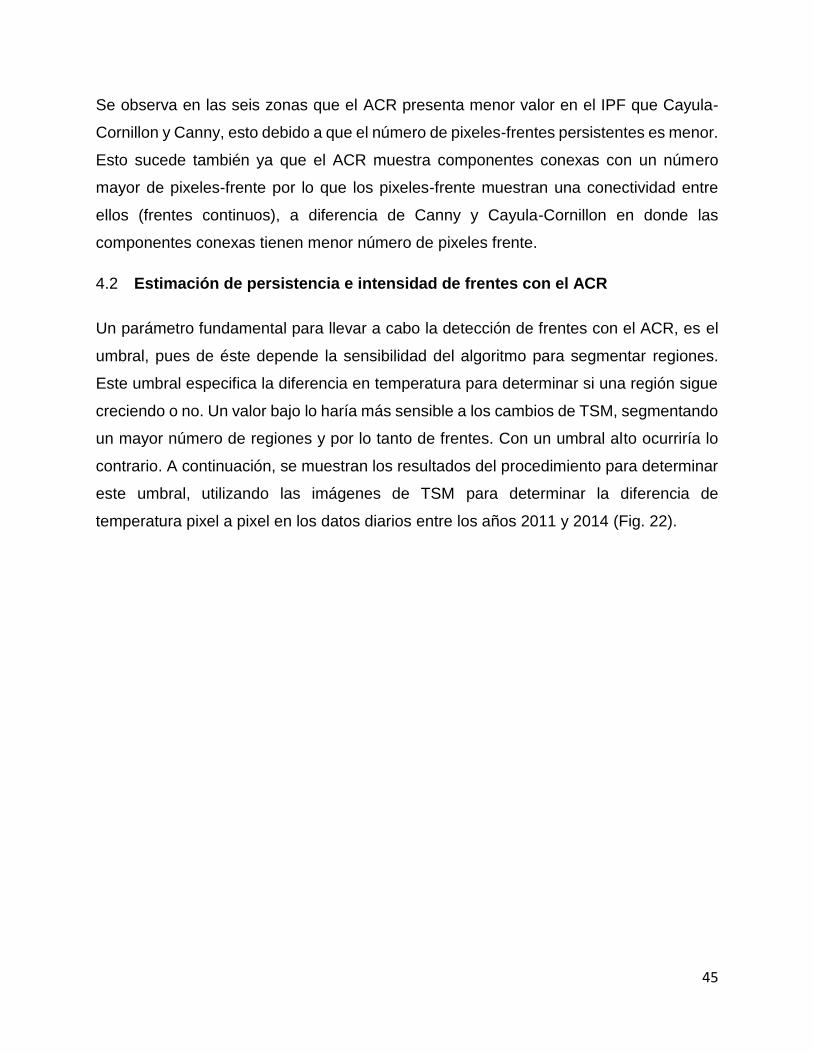
Se aplicó el criterio de Kahru et al. (2012) para determinar índice de persistencia de
frentes (IPF) (apartado 3.2.3) para cada una de las zonas que se utilizaron para comparar
los algoritmos de detección de frentes. El ACR muestra valores menores que los otros
algoritmos, debido a que detecta frentes más continuos (Fig. 21).
Figura 21. Índice de persistencia de frentes utilizado, para comparar los algoritmos de Cayula-Cornillon, Canny y ACR.
45
Se observa en las seis zonas que el ACR presenta menor valor en el IPF que Cayula-
Cornillon y Canny, esto debido a que el número de pixeles-frentes persistentes es menor.
Esto sucede también ya que el ACR muestra componentes conexas con un número
mayor de pixeles-frente por lo que los pixeles-frente muestran una conectividad entre
ellos (frentes continuos), a diferencia de Canny y Cayula-Cornillon en donde las
componentes conexas tienen menor número de pixeles frente.
4.2 Estimación de persistencia e intensidad de frentes con el ACR
Un parámetro fundamental para llevar a cabo la detección de frentes con el ACR, es el
umbral, pues de éste depende la sensibilidad del algoritmo para segmentar regiones.
Este umbral especifica la diferencia en temperatura para determinar si una región sigue
creciendo o no. Un valor bajo lo haría más sensible a los cambios de TSM, segmentando
un mayor número de regiones y por lo tanto de frentes. Con un umbral alto ocurriría lo
contrario. A continuación, se muestran los resultados del procedimiento para determinar
este umbral, utilizando las imágenes de TSM para determinar la diferencia de
temperatura pixel a pixel en los datos diarios entre los años 2011 y 2014 (Fig. 22).
46
Figura 22. Diferencias de temperaturas diarias pixel a pixel para determinar el valor del umbral, parámetro crucial para realizar la detección de frentes con el ACR. El valor del umbral es el promedio de los umbrales para el periodo de estudio: A. 2011, B.2012, C.2013 y D.2014.
La figura 22 muestra el promedio de las diferencias de TSM anual, representada con la
línea de color azul. Estas diferencias de temperaturas se promediaron y se obtuvo el
valor de 0.5025 ≅ 0.5 el cual se estableció como el criterio de homogeneidad para
realizar la segmentación con el ACR.
Una vez obtenido el valor del umbral se realizó la detección de frentes diarios en el Golfo
de California. La Figura 23 muestra los frentes detectados para los datos de TSM del
15/04/2011:

47
Figura 23. Detección de frentes oceánicos en el GC para el 15/04/2011.
A partir de estos datos de frentes diarios, se calculó la persistencia de frentes para cada
mes del periodo establecido. Esto se realizó sumando pixel a pixel en las imágenes
binarias que se generan de la detección de bordes. Como resultado se obtuvieron
imágenes que representan la persistencia de frentes durante cada mes del periodo (Fig.
24).
48
Figura 24. Generación del mapa de persistencia mensual para abril de 2011. La barra de color indica la de persistencia (en días) de pixeles-frente en el mes.
Con la finalidad de seleccionar los pixeles-frente con mayor persistencia, se define un
umbral que especifica el mínimo valor de persistencia, tanto para mostrar en el mapa,
como para almacenar como resultado de la selección. Por ejemplo, si se desea
seleccionar sólo los pixeles-frente con persistencia mayor a 3 días, se elige ese valor
como umbral.
La barra de color en el mapa de persistencia (Fig. 24) indica el valor de persistencia de
los pixeles-frente detectados en el mes de abril de 2011. En el mapa se observa que los
frentes más persistentes se encuentran en la región de las Grandes Islas, así como en
las costas del sur de Sonora y toda la costa de Sinaloa hasta Cabo Corrientes.
La Figura 25 muestra el mapa de la intensidad de frentes oceánicos para el 10/04/2011.
La barra de color muestra las diferencias de temperatura entre las regiones detectadas
con el ACR. En el recuadro se aprecian frentes con tonos que indican su intensidad

49
Figura 25. Mapa de intensidades en el GC para 10 de abril del 2011
Con la función de intensidad (codificada en MATLAB) intensity también es posible
seleccionar la intensidad de los frentes diarios que se desean mostrar, mediante la
especificación de otro umbral, el de la intensidad que se desea obtener. La Figura 26
muestra diferentes mapas de intensidad para el 10/04/2011. El valor del umbral se va
modificando, así, a medida que aumenta los frentes mostrados se restringen.

50
Figura 26. Mapa de intensidades para los datos de TSM del 10/04/2011. Se utilizan
diferentes valores de umbral (0, 0.5, 0.8 y 1).
51
4.3 Distancia de las estaciones de muestreo a los pixeles-frente
Se generó el mapa de persistencia de frentes para el mes de junio de 2014 utilizando las
imágenes G1SST del Golfo de California, ubicando las 59 estaciones de muestreo del
crucero BIPOGN-1406 (Fig. 27) realizado del 1 al 18 de junio de 2014. Las estaciones
están ubicadas desde el sur de la región de las Grandes Islas hasta la boca del golfo.
Figura 27. Ubicación de las estaciones de muestreo del crucero oceanográfico BIPOGN-1406 para el mes de junio de 2014. El número de pixeles-frente persistente se muestra en la escala de colores.
El número máximo de persistencia de frentes para el mes del muestreo fue 13. Los
frentes menos persistentes aparecen de color azul. Como se mencionó en el apartado
3.2.5, se calculó la distancia entre estaciones consecutivas y se obtuvo el promedio de

52
estas distancias. La distancia promedio se dividió entre 2 para obtener un radio de
búsqueda (18.45 km) de pixeles-frente a partir de la ubicación de cada estación y generar
regiones circulares en torno a cada estación. Después se calcularon las distancias de
cada estación a los pixeles-frentes que dentro de cada región circular (Fig. 28).
Figura 28. Distancia en las estaciones de muestreo 9 y 44 y los pixeles-frente encontrados en cada una de ellas.
En la Figura 29 se muestran las distancias mínimas de las estaciones a los frentes y el
número de pixeles-frente en cada región.
53
Figura 29. Distancias mínimas y número de pixeles-frente detectados en cada región alrededor (radio de búsqueda de 18.45 km) de las estaciones de muestreo.
Las tres estaciones del crucero oceanográfico BIPOGN-1406 que presentan la menor
distancia a los pixeles-frente y el mayor número de éstos por región son: estación 1 con
0.4 km y 229 pixeles-frentes, estación 14 con 0.8 km y 232 pixeles-frentes y la estación
49 con 0.8 Km y 227 pixeles-frentes. Las tres estaciones con la distancia máxima a los
pixeles frentes y número menor de ellos por región son: estación 22 con 18 km y 3
pixeles-frentes, estación 23 con 13.9 km y 1 pixel-frente y la estación 34 con 17.5 km y
3 pixeles-frentes.
Además se determinaron las diez primeras distancias de cada estación a los pixeles
frentes en cada una de las regiones, y el número de pixeles-frente en ellas (ver anexo
1).
54
4.4 Análisis de la persistencia de frentes
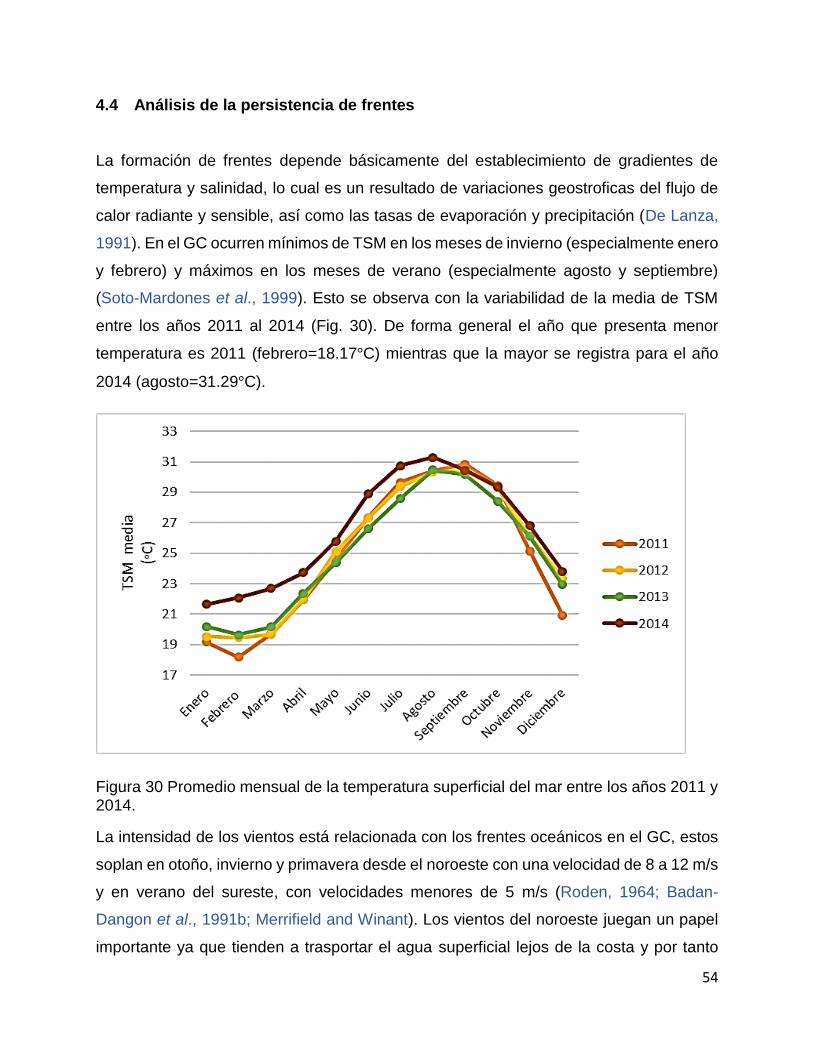
La formación de frentes depende básicamente del establecimiento de gradientes de
temperatura y salinidad, lo cual es un resultado de variaciones geostroficas del flujo de
calor radiante y sensible, así como las tasas de evaporación y precipitación (De Lanza,
1991). En el GC ocurren mínimos de TSM en los meses de invierno (especialmente enero
y febrero) y máximos en los meses de verano (especialmente agosto y septiembre)
(Soto-Mardones et al., 1999). Esto se observa con la variabilidad de la media de TSM
entre los años 2011 al 2014 (Fig. 30). De forma general el año que presenta menor
temperatura es 2011 (febrero=18.17°C) mientras que la mayor se registra para el año
2014 (agosto=31.29°C).
Figura 30 Promedio mensual de la temperatura superficial del mar entre los años 2011 y 2014.
La intensidad de los vientos está relacionada con los frentes oceánicos en el GC, estos
soplan en otoño, invierno y primavera desde el noroeste con una velocidad de 8 a 12 m/s
y en verano del sureste, con velocidades menores de 5 m/s (Roden, 1964; Badan-
Dangon et al., 1991b; Merrifield and Winant). Los vientos del noroeste juegan un papel
importante ya que tienden a trasportar el agua superficial lejos de la costa y por tanto

55
producen afloramiento (Thorade, 1909). Durante el verano el viento produce surgencias
muy débiles ya que el agua está mucho más estratificada y la velocidad de los vientos
es mucho menor (Candela, 1984). Esto se observa en la Figura 31, que muestra una
serie mensual de persistencias de frentes durante el periodo 2011-2014. Los frentes se
obtuvieron con el ACR, según el procedimiento descrito en el apartado 3.2.4.
Figura 31. Serie de persistencias máximas mensual de los frentes oceánicos en el GC para el periodo 2011-2014.
En la figura 31 se observa que los meses con máximos de persistencia de pixeles-frentes
fueron marzo, abril, mayo y noviembre. Estos frentes se generan de surgencias por las
causas descritas anteriormente de los vientos del noroeste. Para el mes de septiembre
disminuye el número de pixeles-frente persistentes en el GC lo cual puede ser debido a
la homogeneidad de las aguas superficiales del golfo.
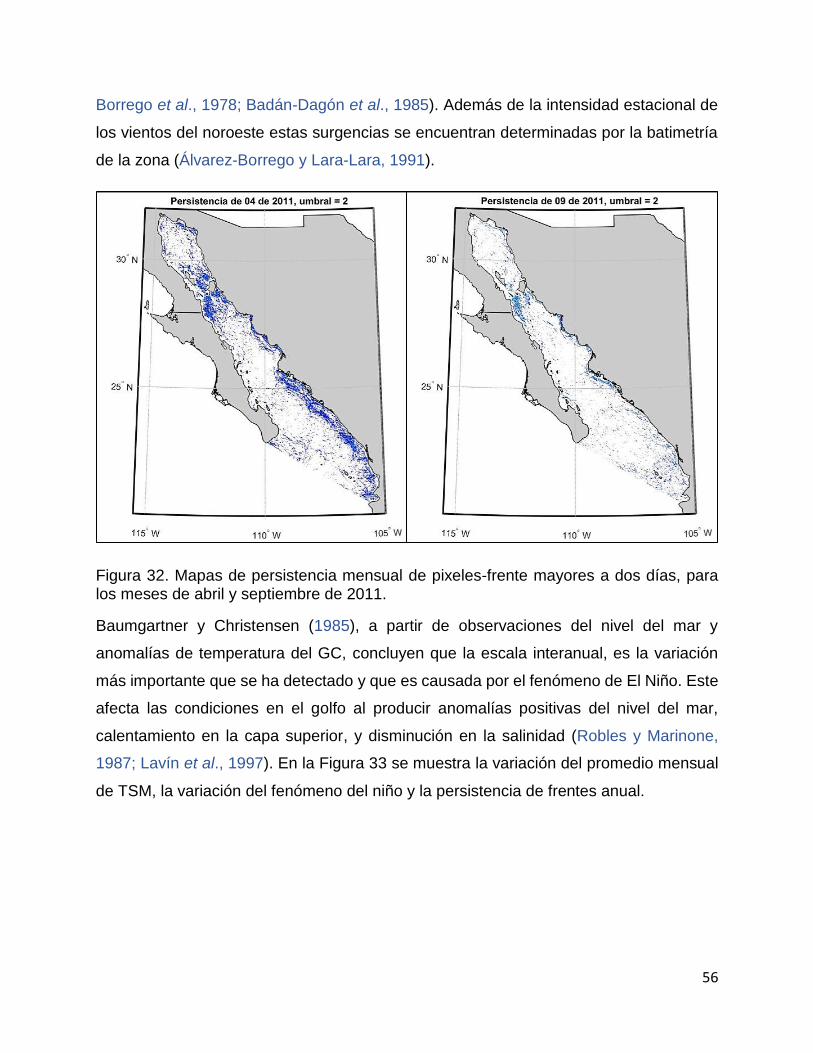
El mapa de persistencia para abril y septiembre (Fig. 32) muestra que es menor el
número de pixeles frente persistente en este último mes. En abril se visualizan los frentes,
los cuales están asociados con surgencias costeras, que ocurren con mayor intensidad
entre invierno y primavera sobre las costas de Sonora y Sinaloa (Roden, 1958; Álvarez-
56
Borrego et al., 1978; Badán-Dagón et al., 1985). Además de la intensidad estacional de
los vientos del noroeste estas surgencias se encuentran determinadas por la batimetría
de la zona (Álvarez-Borrego y Lara-Lara, 1991).
Figura 32. Mapas de persistencia mensual de pixeles-frente mayores a dos días, para los meses de abril y septiembre de 2011.
Baumgartner y Christensen (1985), a partir de observaciones del nivel del mar y
anomalías de temperatura del GC, concluyen que la escala interanual, es la variación
más importante que se ha detectado y que es causada por el fenómeno de El Niño. Este
afecta las condiciones en el golfo al producir anomalías positivas del nivel del mar,
calentamiento en la capa superior, y disminución en la salinidad (Robles y Marinone,
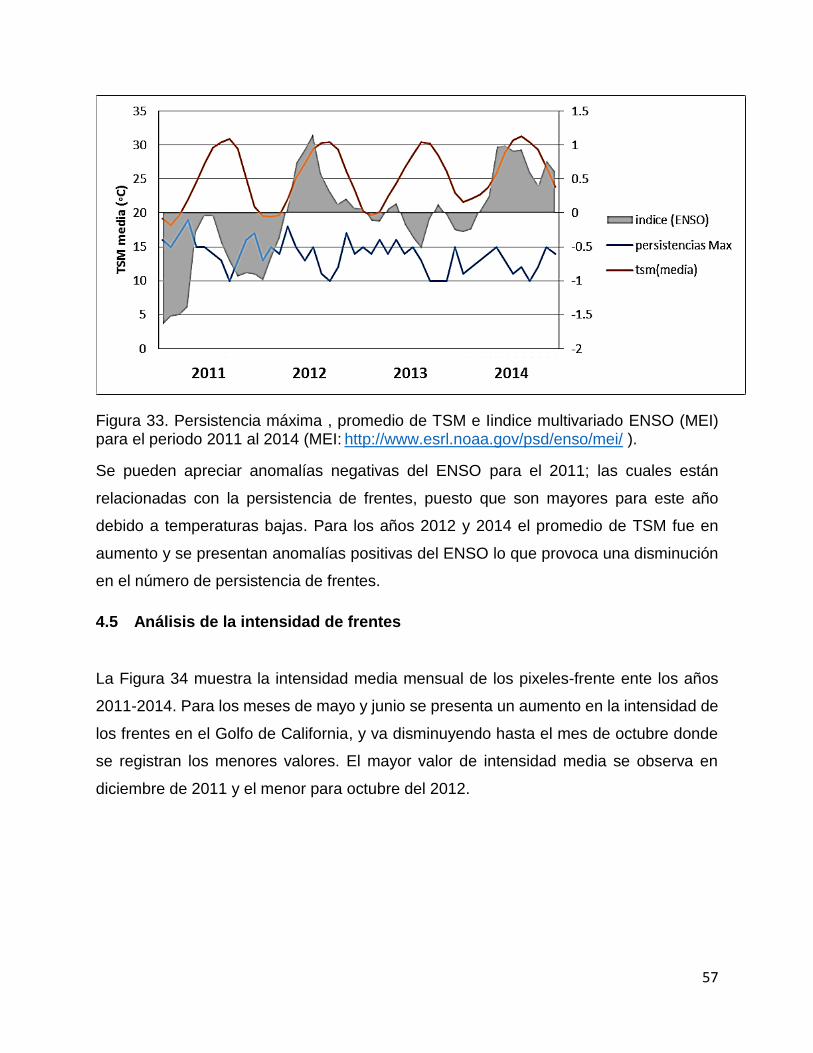
1987; Lavín et al., 1997). En la Figura 33 se muestra la variación del promedio mensual
de TSM, la variación del fenómeno del niño y la persistencia de frentes anual.
57
Figura 33. Persistencia máxima , promedio de TSM e Iindice multivariado ENSO (MEI) para el periodo 2011 al 2014 (MEI: http://www.esrl.noaa.gov/psd/enso/mei/ ).
Se pueden apreciar anomalías negativas del ENSO para el 2011; las cuales están
relacionadas con la persistencia de frentes, puesto que son mayores para este año
debido a temperaturas bajas. Para los años 2012 y 2014 el promedio de TSM fue en
aumento y se presentan anomalías positivas del ENSO lo que provoca una disminución
en el número de persistencia de frentes.
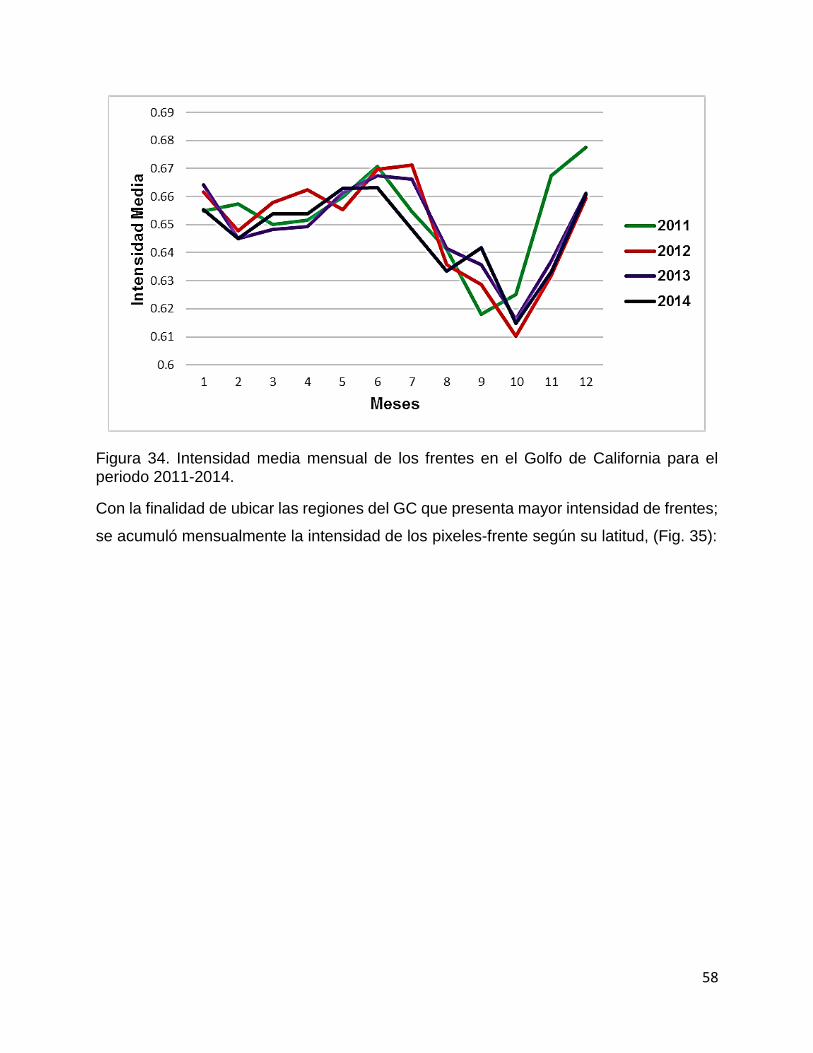
4.5 Análisis de la intensidad de frentes
La Figura 34 muestra la intensidad media mensual de los pixeles-frente ente los años
2011-2014. Para los meses de mayo y junio se presenta un aumento en la intensidad de
los frentes en el Golfo de California, y va disminuyendo hasta el mes de octubre donde
se registran los menores valores. El mayor valor de intensidad media se observa en
diciembre de 2011 y el menor para octubre del 2012.
58
Figura 34. Intensidad media mensual de los frentes en el Golfo de California para el periodo 2011-2014.
Con la finalidad de ubicar las regiones del GC que presenta mayor intensidad de frentes;
se acumuló mensualmente la intensidad de los pixeles-frente según su latitud, (Fig. 35):
59
Figura 35. Acumulación mensual de las intensidades de los pixeles-frente de acuerdo a la latitud.
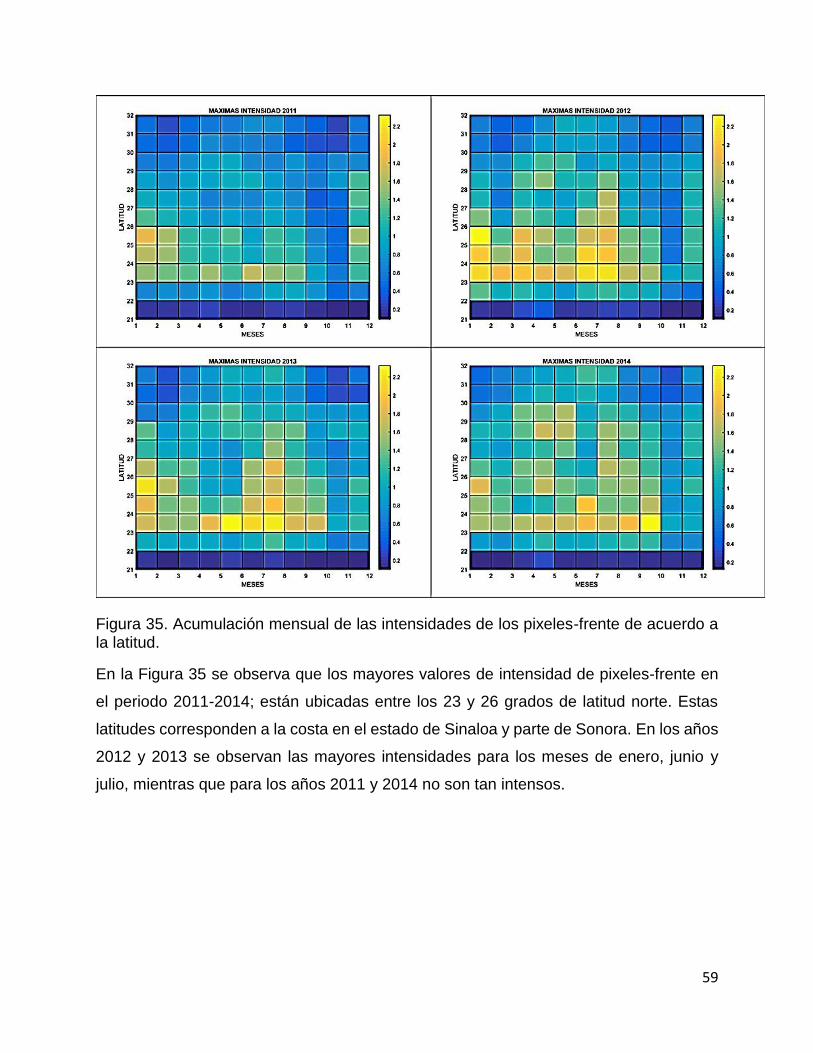
En la Figura 35 se observa que los mayores valores de intensidad de pixeles-frente en
el periodo 2011-2014; están ubicadas entre los 23 y 26 grados de latitud norte. Estas
latitudes corresponden a la costa en el estado de Sinaloa y parte de Sonora. En los años
2012 y 2013 se observan las mayores intensidades para los meses de enero, junio y
julio, mientras que para los años 2011 y 2014 no son tan intensos.
60
5 CONCLUSIONES
Se implementaron los algoritmos de Canny y Cayula-Cornillon y se propuso un
algoritmo de crecimiento de regiones (ACR) para detectar frentes en imágenes de
temperatura superficial del mar. Entre las diferencias significativas se observa que
el ACR detecta frentes más continuos que Cayula-Cornillon y Canny.
El ACR tiene un valor de compacidad menor que los algoritmos de Canny y
Cayula-Cornillon, es decir que detecta frentes más delgados y con una mayor
longitud.
El ACR también detecta áreas según un criterio de semejanza establecido
(umbral).
En la secuencia de imágenes de TSM para los años 2011-2014 se observó que
los meses con mayores pixeles-frente persistentes son marzo, abril y noviembre;
y los de menor persistencias agosto y septiembre. Estos frentes persistentes se
ubican en la costa oriental del GC entre los estados de Sonora y Sinaloa, así como
también en la región de las Grandes Islas.
Las mayores intensidades de los pixeles-frente acumulados mensualmente a
partir de la detección diaria en imágenes de TSM se encuentran entre los 23 y 26
grados de latitud norte correspondiente al estado de Sinaloa y parte sur de
Sonora.
Se determinaron distancias entre estaciones de muestreo del crucero
oceanográfico BIPOGN-1406 y los pixeles-frentes en una región alrededor de
cada estación. Estas distancias son de importancia debido a que se pueden
relacionar con la distribución de larvas de peces y determinar la influencia de los
frentes en los índices de abundancia, riqueza y diversidad.
61
RECOMENDACIONES
El estudio de frentes oceánicos mediante algoritmos de detección de bordes puede
ser complementado con el análisis de parámetros ambientales como la velocidad y
dirección del viento y sus cambios en el tiempo.
El fenómeno del niño (ENSO) afecta las condiciones en el GC como el aumento de
la temperatura en la capa superior. Se recomienda trabajar una serie con más de diez
años de datos satelitales y detectar frentes para analizar el efecto del fenómeno del
niño y la niña en la persistencia e intensidades de los frentes
El ACR realiza la detección de frentes con un costo computacional alto, ya que
requiere más tiempo que los otros algoritmos. El ACR demora 14 veces más para
detectar frentes que el algoritmo de Cayula-Cornillon y 100 veces más que el de
Canny. De acuerdo a esta situación se recomienda trabajar con procesamiento en
paralelo para la ejecución simultánea de las instrucciones contenidas en el ACR, para
obtener resultados más rápidos. Para este propósito se debe contar con lenguaje de
programación de alto nivel como MATLAB y del hardware adecuado para la ejecución
de las tareas.

62
REFERENCIAS
Alfaro, A. J. A., y Mendoza, I. A. S. (2006). Diseño de un Algoritmo de Segmentación de
Imágenes aplicando el Funcional de Mumford-Shah para mejorar el desempeño
de los Algoritmos Clásicos de Segmentación. Computer Engineering thesis,
School of Informatic, University National of Trujillo.
Alvarez-Borrego S. and Lara-Lara J.R. 1991. The physical enviroment and primary
productivity of the Gulf of California. En: Dauphin JP and Simoneit B (eds) The
Gulf and Peninsular Province of the California. American Association of Petroleum
Geologists.47, Tulsa: 555– 567.
Alvarez-Borrego S., Rivera J.A., Gaxiola-Castro G., Acosta- Ruiz M.J. y Schwartzlose
R.A. 1978. Nutrientes en el Golfo de California. Ciencias Marinas. 6: 13-22. Arias-
Aréchiga J.P. 1998. Regionalización del Golfo de California: una propuesta a partir
de concentración de pigmentos fotosintéticos (CZCS). Tesis professional. UABCS.
México.
Badan-Dangon. A., Dorman, C.E., Merrifield, M.A. y Winant, C.D.1991.The lower
atmosphere over the Gulf of California. Journal of Geophysical Research,
96(16):877-896.
Badan-Dangon A., Kolinsky D.J. and Baumgartner T. 1985. Spring and summer in the
Gulf of California: observations of surface thermal patterns. Oceanologica Acta. 8:
13–22.
Bakun A (2006) Fronts and eddies as key structures in the habitat of marine fish larvae:
Opportunity, adaptive response and competitive advantage. Scientia Marina
70:105-122.
Bastarrika, A., y Chuvieco, E. (2006). Cartografía del área quemada mediante
crecimiento de regiones: aplicación en entornos mediterráneos con imágenes tm
y etm+. GeoFocus. Revista Internacional de Ciencia y Tecnología de la
Información Geográfica, (6), 182-204.
63
Baumgartner, T.R. and Christensen, N. Jr. (1985). Coupling of the Gulf of California to
large-scale interannual climatic variability. J. Mar. Res., 43: 825–848
Belkin, I. M., Cornillon, P. C., and Sherman, K. (2009). Fronts in large marine
ecosystems. Progress in Oceanography, 81(1), 223-236.
Bray, N. A., and Robles, J. M. (1991). Physical oceanography of the Gulf of California. The
Gulf and peninsular province of the California, 47, 511e533.
Candela, J., A. Badán-Dangon y C.D. Winant, 1984. Distribución espacial de variables
físicas en las capas bajas de la atmósfera sobre el Golfo de California. Un reporte
de dalos. Voi 1. Verano de 1983. Scripps Inst. Oceanogr. Ref. Series #84-83, La
Jolla, CA. 211 p.
Canny. A Computational Approach to Edge Detection, IEEE Trans. on Pattern Analysis
and Machine Intelligence, 8(6), pp. 679-698 (1986).
Canton Garbin, M. y Hernández Guerra, A. (1991). TELEDETECCION EN EL ESTUDIO
DEL OCEANO. APLICACIONES EN CANARIAS. Jornadas en APLICACIONES A
CARTOGRAFIA DIGITAL; Las Palmas de Gran Canaria, pp.1-29.
Castro, R., Mascarenhas, A. S., Durazo, R., and Collins, C. A. (2000). Variación
estacional de la temperatura y salinidad en la entrada del Golfo de California,
México.
Cayula, J. F., and Cornillon, P. (1992). Edge detection algorithm for SST images. Journal
of Atmospheric and Oceanic Technology, 9(1), 67-80.
Cayula, J. F., and Cornillon, P. (1995). Multi-image edge detection for SST images.
Journal of Atmospheric and Oceanic Technology, 12(4), 821-829.
Chang, Y., and Cornillon, P. (2013). A comparison of satellite-derived sea surface
temperature fronts using two edge detection algorithms. Deep Sea Research Part
II: Topical Studies in Oceanography.

64
Chao, Y., Li, Z., Farrara, J. D., & Hung, P. (2009). Blending sea surface temperatures
from multiple satellites and in situ observations for coastal oceans. Journal of
Atmospheric and Oceanic Technology, 26(7), 1415-1426.
Chuvieco Salinero, E. (1996). Fundamentos de teledetección espacial. Rialp. Madrid,
España, 27 p.
Coto, E. (2003). Métodos de segmentación de imágenes médicas. Universidad Central
de Venezuela: Lecturas en Ciencias de la Computación, 1, 9-15.
Crespo, C., & Ochoa, D. (2009). Evaluación Cuantitativa de la Influencia de los Espacios
de Color para la Detección Automática de Células.
Davidovich, V. A. (2014). Algorithm of automated recognition of oceanic temperature
fronts. Oceanology, 54(1), 95-101.
De la Lanza Espino, G. (1991). Oceanografía de mares mexicanos. AGT Editor, S.A.
569 p.
Diehl, S. F., Budd, J. W., Ullman, D., & Cayula, J. F. (2002). Geographic window sizes
applied to remote sensing sea surface temperature front detection. Journal of
Atmospheric and Oceanic Technology, 19(7), 1105-1113.
Erik, C., Daniel, Z., & Marco, P. (2010). Procesamiento Digital de Imágenes con MATLAB
y SIMULINK. RA-MA Editorial, México.
Fedorov, K. N. 1986. The Physical Nature and Structure of Oceanic Fronts, tomo 19 de
Lecture Notes on Coastal and Estuarine Studies. Springer-Verlag, New York. ISBN
3540964452, 333 p.
Gonzalez, R. C., Woods, R. E., y Eddins, S. L. (2004).Digital image processing using
MATLAB. Pearson Education India.
Halliwell, G. R., Jr., P. Cornillon, K. H. Brink, R. T. Pollard, D. L. Evans, L. A. Regier, J.
M. Tooke and R. W. Schmitt. 1991. Descriptive oceanography during the Frontal
Air-Sea Interaction Experiment: medium to large-scale variability. J. Geophys.
Res., 96, 8553-8568.
Hernandez, J., 1923, The temperature of Mexico: Monthly Weather Rev. Supp. 23, 24 p.
65
Holligan, P. M. (1981). Biological implications of fronts on the northwest European
continental shelf. Philosophical Transactions of the Royal Society of London A:
Mathematical, Physical and Engineering Sciences, 302(1472), 547-562.
Holyer, R. J., & Peckinpaugh, S. H. (1989). Edge detection applied to satellite imagery of
the oceans. IEEE Transactions on Geoscience and Remote Sensing, 27(1), 46-
56.
Jähne, B. (2005). Digital image processing. The Netherlands: Springer-Verlag.
Jaramillo, M. A., Fernández, J. A., & de Salazar, E. M. (2010). Implementación del
Detector de Bordes de Canny sobre Redes Neuronales Celulares. Universidad de
Extremadura.
Jiménez, A., Marinone, S. G., & Parés-Sierra, A. (2005). Efecto de la variabilidad espacial
y temporal del viento sobre la circulación en el Golfo de California. Ciencias
Marinas, 31(2), 357-368.
Kahru, M., Håkansson, B., & Rud, O. (1995). Distributions of the sea-surface temperature
fronts in the Baltic Sea as derived from satellite imagery. Continental Shelf
Research, 15(6), 663-679.
Kahru, M., Di Lorenzo, E., Manzano-Sarabia, M., & Mitchell, B. G. (2012). Spatial and
temporal statistics of sea surface temperature and chlorophyll fronts in the
California Current. Journal of plankton research, 34(9), 749-760.
Larcher, L. I., Biasoni, E. M., Cattaneo, C. A., Ruggeri, A. I., & Herrera, A. C. Mecánica
Computacional, Volume XXX. Number 37. Interdisciplinary Mathematical Models
(B).
Lavín, M.F., Beier, E. y Badán, A. (1997). Estructura hidrográfica y circulación del Golfo
de California: Escalas estacional e interanual. Contribuciones de la Oceanografía
Física en México.
66
Letelier, J. (2010). Surgencias y Estructuras de Mesoescala frente a Chile (18–42
S) (Doctoral dissertation, Ph. D. Thesis, Universidad de Concepción, Biobío,
Chile).
Lira, J. (2002). Introducción al tratamiento digital de imágenes. México: Instituto
Politécnico Nacional. Universidad Nacional Autónoma de México. Fondo de
Cultura Económica.
Lluch-Cota S. E., E. A. Aragón-Noriega, F. Arreguín-Sánchez, D. Aurioles-Gamboa, J. J.
Bautista-Romero, R. C. Brusca, R. Cervantes-Duarte, R. Cortés-Altamirano, P.
Del-Monte-Luna, A. Esquivel-Herrera, G. Fernández, M. E. Hendrickx, S.
Hernández-Vázquez, H. Herrera-Cervantes, M. Kahru, M. Lavín, D. Lluch-Belda,
D. B. Lluch-Cota, J. López-Martínez, S. G. Marinone, M. O. Nevárez-Martínez, S.
Ortega-García, E. Palacios-Castro, A. Parés-Sierra, G. Ponce-Díaz, M. Ramírez-
Rodríguez, C. A. Salinas-Zavala, R. A. Schwartzlose & A. P. Sierra-Beltrán. 2007.
The Gulf of California: review of ecosystem status and sustainability challenges.
Progress in Oceanography, 73(1):1-26.
Martínez-Flores, G. & Avendaño-Ibarra, R. (2014). Distribución espacial de frentes de
temperatura en el golfo de California. XXI Congreso Nacional de Ciencias y
Tecnología del Mar, Cozumel, Q. Roo.
Merrifield, M. A. y C.D Winant, 1989.Shelf Ciriculation in the Gulf of California. A
descripcion of the variability y J.G.R.94 (C12): 18133-18160.
Nieto, K. (2009). Variabilidad oceánica de mesoescala en los ecosistemas de
afloramiento de Chile y Canarias: una comparación a partir de datos satelitales.
Spain: PhD thesis, Universidad de Salamanca, 165.
Oram, J. J., McWilliams, J. C., & Stolzenbach, K. D. (2008). Gradient-based edge
detection and feature classification of sea-surface images of the Southern
California Bight. Remote Sensing of Environment, 112(5), 2397-2415.
67
Palomino, N. L. S., & Concha, U. N. R. (2009). Técnicas de segmentación en
procesamiento digital de imágenes. Revista de investigación de Sistemas e
Informática, 6(2), 9-16.
Parés-Sierra, A., Mascarenhas, A., Marinone, S.G. and Castro, R. (2003). Temporal and
spatial variation of the surface winds in the Gulf of California. Geophys. Res. Lett,
20(6), 1312, doi: 10.1029/ 2002GL016716.
Ping, B., Su, F., Meng, Y., Fang, S., & Du, Y. (2014). A model of sea surface temperature
front detection based on a threshold interval. Acta Oceanologica Sinica, 33(7), 65-
71.
Pollard, R. T. and L. A. Regier. 1992. Vorticity and vertical circulation at an ocean front.
J. Phys. Oceanogr., 22, 609-625.
Rebaza, J. V. (2007). Detección de bordes mediante el algoritmo de Canny. Escuela
Académico Profesional di Informática. Universidad Nacional de Trujillo.
Robinson, I. S. (2010). Discovering the Ocean from Space: The unique applications of
satellite oceanography (Vol. 4110). Springer Science & Business Media.
Robles, J.M. and Marinone, S.G. (1987). Seasonal and interannual thermohaline
variability in the Guaymas Basin of the Gulf of California. Cont. Shelf Res., 7: 715–
733.
Roden, G. I. (1958). Oceanographic and meteorological aspects of the Gulf of California,
22p.
Roden, G. I. (1964). Oceanographic aspects of Gulf of California, University of California,
30p.
Roden, G. I., & Emilsson, I. (1980). Oceanografía física del Golfo de California. Centro
de Ciencias del mar y Limnología UNAM, contribución, (90), 67.
68
Shimada, T., Sakaida, F., Kawamura, H., & Okumura, T. (2005). Application of an edge
detection method to satellite images for distinguishing sea surface temperature
fronts near the Japanese coast. Remote sensing of environment, 98(1), 21-34.
Silva, E. P., Llenque, C. E., Herrero, J. M., Gomero, F. C., & Acuña, J. R. (2002). Software
De Procesamiento De Imágenes Del Sensor AVHRR De La Serie De Satélites
NOAA. Electrónica-UNMSM, (8), 33-44.
Simpson, J. J. (1990). On the accurate detection and enhancement of oceanic features
observed in satellite data. Remote Sensing of Environment, 33(1), 17-33.
Soto-Mardones, L., Marinone, S. G., & Parés-Sierra, A. (1999). Variabilidad Espacio
Temporal de la Temperatura Superficial del Mar en el Golfo de California. Ciencias
Marinas, 25(1), 1-30.
Terán Naranjo, M. F., & Viteri Hermoza, L. A. (2005). Procesamiento de imágenes
satelitales para determinación de cambios de cobertura vegetal y deforestación
utilizando MATLAB (Doctoral dissertation, QUITO/EPN/2005).
Thorade, H. 1909. Uber die Kalifornische Meeresstrornung. Hydrog. U. Marit. Met., Ann.
37: 17- 34, 63-76.
Torres-Orozco, E., 1993. Análisis volumétrico de las masas de agua en el Golfo de
California. M.Sc. Thesis, CICESE, Ensenada, México, 80pp.
Ullman, D. S., and Cornillon, P. C. (1999). Surface temperature fronts off the East Coast
of North America from AVHRR imagery. J. Geophys. Res, 104(C10), 23459-
23478.
Vargas, M. G. F., and Cruz, E. A. A. (2001). Estudio del Efecto de las Máscaras de
Convolución en Imágenes Mediante el Uso de la Transformada de Fourier.
Ingeniería e Investigación, (48), 46-51.
Vázquez, D. P., Atae-Allah, C., and Escamilla, P. L. L. (1999). Entropic approach to edge
detection for SST images. Journal of Atmospheric and Oceanic Technology, 16(7),
970-979.
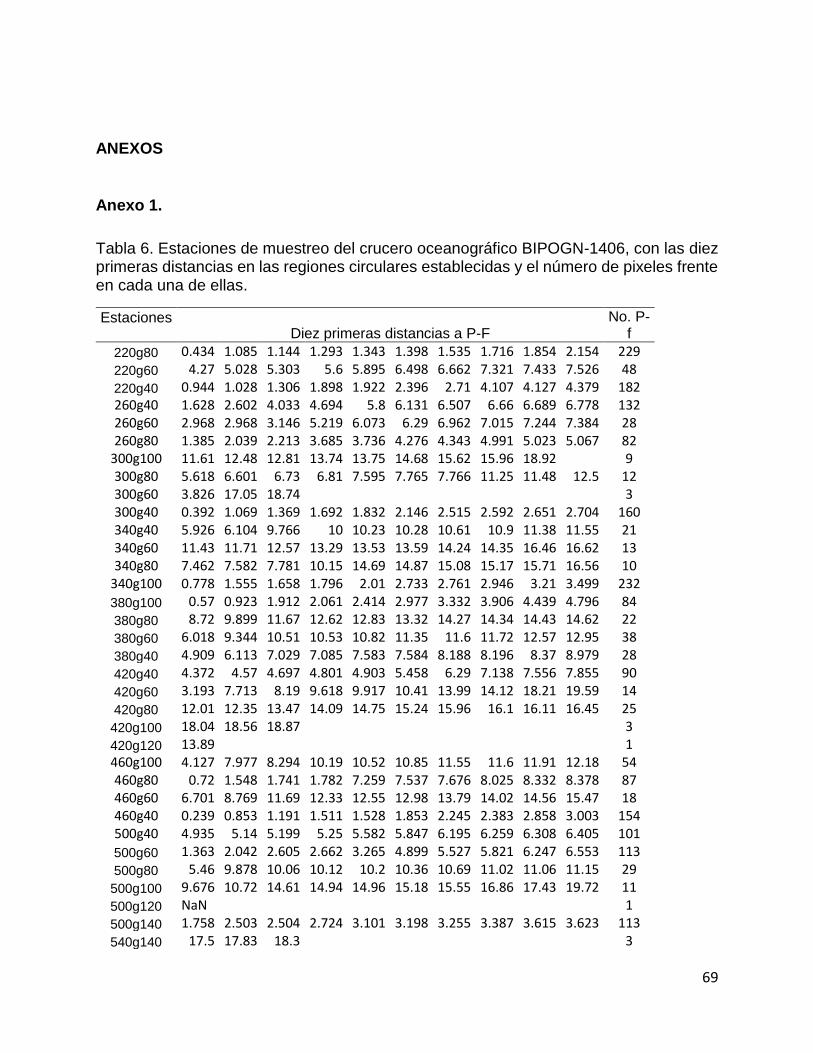
69
ANEXOS
Anexo 1.
Tabla 6. Estaciones de muestreo del crucero oceanográfico BIPOGN-1406, con las diez primeras distancias en las regiones circulares establecidas y el número de pixeles frente en cada una de ellas.
Estaciones Diez primeras distancias a P-F
No. P-f
220g80 0.434 1.085 1.144 1.293 1.343 1.398 1.535 1.716 1.854 2.154 229
220g60 4.27 5.028 5.303 5.6 5.895 6.498 6.662 7.321 7.433 7.526 48
220g40 0.944 1.028 1.306 1.898 1.922 2.396 2.71 4.107 4.127 4.379 182 260g40 1.628 2.602 4.033 4.694 5.8 6.131 6.507 6.66 6.689 6.778 132 260g60 2.968 2.968 3.146 5.219 6.073 6.29 6.962 7.015 7.244 7.384 28 260g80 1.385 2.039 2.213 3.685 3.736 4.276 4.343 4.991 5.023 5.067 82
300g100 11.61 12.48 12.81 13.74 13.75 14.68 15.62 15.96 18.92 9 300g80 5.618 6.601 6.73 6.81 7.595 7.765 7.766 11.25 11.48 12.5 12 300g60 3.826 17.05 18.74 3 300g40 0.392 1.069 1.369 1.692 1.832 2.146 2.515 2.592 2.651 2.704 160 340g40 5.926 6.104 9.766 10 10.23 10.28 10.61 10.9 11.38 11.55 21 340g60 11.43 11.71 12.57 13.29 13.53 13.59 14.24 14.35 16.46 16.62 13 340g80 7.462 7.582 7.781 10.15 14.69 14.87 15.08 15.17 15.71 16.56 10
340g100 0.778 1.555 1.658 1.796 2.01 2.733 2.761 2.946 3.21 3.499 232
380g100 0.57 0.923 1.912 2.061 2.414 2.977 3.332 3.906 4.439 4.796 84
380g80 8.72 9.899 11.67 12.62 12.83 13.32 14.27 14.34 14.43 14.62 22
380g60 6.018 9.344 10.51 10.53 10.82 11.35 11.6 11.72 12.57 12.95 38
380g40 4.909 6.113 7.029 7.085 7.583 7.584 8.188 8.196 8.37 8.979 28
420g40 4.372 4.57 4.697 4.801 4.903 5.458 6.29 7.138 7.556 7.855 90
420g60 3.193 7.713 8.19 9.618 9.917 10.41 13.99 14.12 18.21 19.59 14
420g80 12.01 12.35 13.47 14.09 14.75 15.24 15.96 16.1 16.11 16.45 25
420g100 18.04 18.56 18.87 3
420g120 13.89 1 460g100 4.127 7.977 8.294 10.19 10.52 10.85 11.55 11.6 11.91 12.18 54 460g80 0.72 1.548 1.741 1.782 7.259 7.537 7.676 8.025 8.332 8.378 87 460g60 6.701 8.769 11.69 12.33 12.55 12.98 13.79 14.02 14.56 15.47 18 460g40 0.239 0.853 1.191 1.511 1.528 1.853 2.245 2.383 2.858 3.003 154 500g40 4.935 5.14 5.199 5.25 5.582 5.847 6.195 6.259 6.308 6.405 101
500g60 1.363 2.042 2.605 2.662 3.265 4.899 5.527 5.821 6.247 6.553 113
500g80 5.46 9.878 10.06 10.12 10.2 10.36 10.69 11.02 11.06 11.15 29
500g100 9.676 10.72 14.61 14.94 14.96 15.18 15.55 16.86 17.43 19.72 11
500g120 NaN 1
500g140 1.758 2.503 2.504 2.724 3.101 3.198 3.255 3.387 3.615 3.623 113
540g140 17.5 17.83 18.3 3
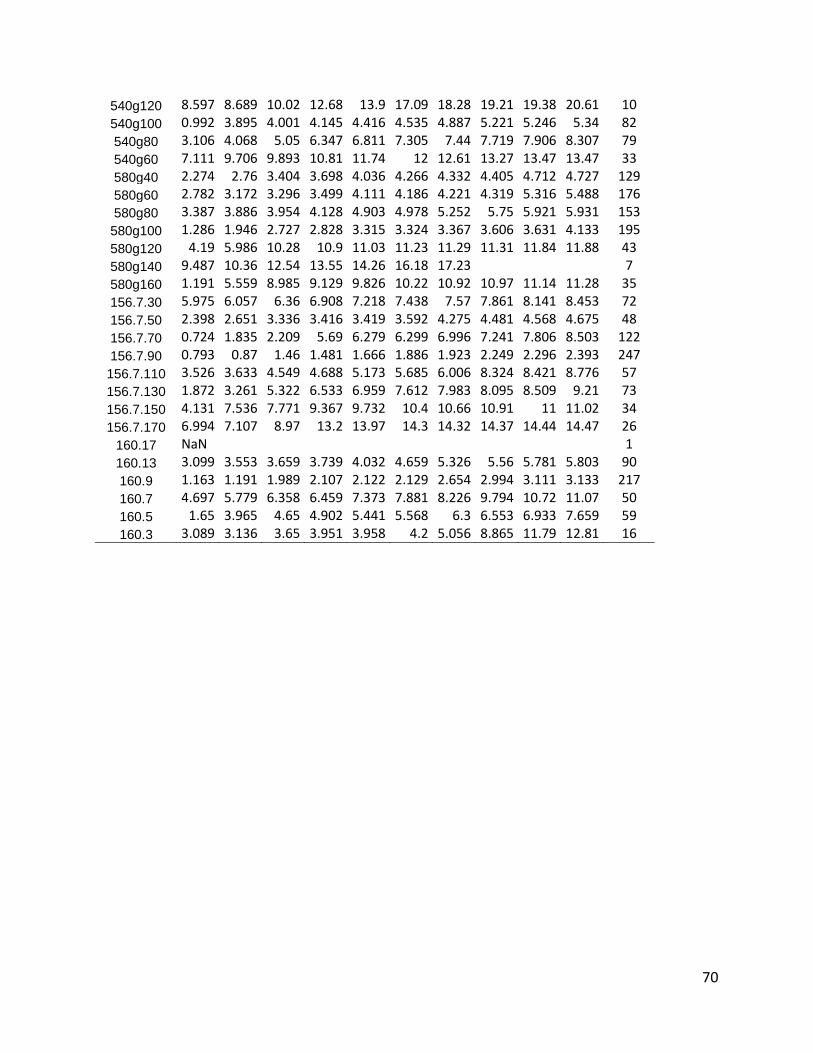
70
540g120 8.597 8.689 10.02 12.68 13.9 17.09 18.28 19.21 19.38 20.61 10
540g100 0.992 3.895 4.001 4.145 4.416 4.535 4.887 5.221 5.246 5.34 82
540g80 3.106 4.068 5.05 6.347 6.811 7.305 7.44 7.719 7.906 8.307 79
540g60 7.111 9.706 9.893 10.81 11.74 12 12.61 13.27 13.47 13.47 33
580g40 2.274 2.76 3.404 3.698 4.036 4.266 4.332 4.405 4.712 4.727 129
580g60 2.782 3.172 3.296 3.499 4.111 4.186 4.221 4.319 5.316 5.488 176
580g80 3.387 3.886 3.954 4.128 4.903 4.978 5.252 5.75 5.921 5.931 153
580g100 1.286 1.946 2.727 2.828 3.315 3.324 3.367 3.606 3.631 4.133 195
580g120 4.19 5.986 10.28 10.9 11.03 11.23 11.29 11.31 11.84 11.88 43
580g140 9.487 10.36 12.54 13.55 14.26 16.18 17.23 7
580g160 1.191 5.559 8.985 9.129 9.826 10.22 10.92 10.97 11.14 11.28 35
156.7.30 5.975 6.057 6.36 6.908 7.218 7.438 7.57 7.861 8.141 8.453 72
156.7.50 2.398 2.651 3.336 3.416 3.419 3.592 4.275 4.481 4.568 4.675 48
156.7.70 0.724 1.835 2.209 5.69 6.279 6.299 6.996 7.241 7.806 8.503 122
156.7.90 0.793 0.87 1.46 1.481 1.666 1.886 1.923 2.249 2.296 2.393 247
156.7.110 3.526 3.633 4.549 4.688 5.173 5.685 6.006 8.324 8.421 8.776 57
156.7.130 1.872 3.261 5.322 6.533 6.959 7.612 7.983 8.095 8.509 9.21 73
156.7.150 4.131 7.536 7.771 9.367 9.732 10.4 10.66 10.91 11 11.02 34
156.7.170 6.994 7.107 8.97 13.2 13.97 14.3 14.32 14.37 14.44 14.47 26
160.17 NaN 1
160.13 3.099 3.553 3.659 3.739 4.032 4.659 5.326 5.56 5.781 5.803 90
160.9 1.163 1.191 1.989 2.107 2.122 2.129 2.654 2.994 3.111 3.133 217
160.7 4.697 5.779 6.358 6.459 7.373 7.881 8.226 9.794 10.72 11.07 50
160.5 1.65 3.965 4.65 4.902 5.441 5.568 6.3 6.553 6.933 7.659 59
160.3 3.089 3.136 3.65 3.951 3.958 4.2 5.056 8.865 11.79 12.81 16
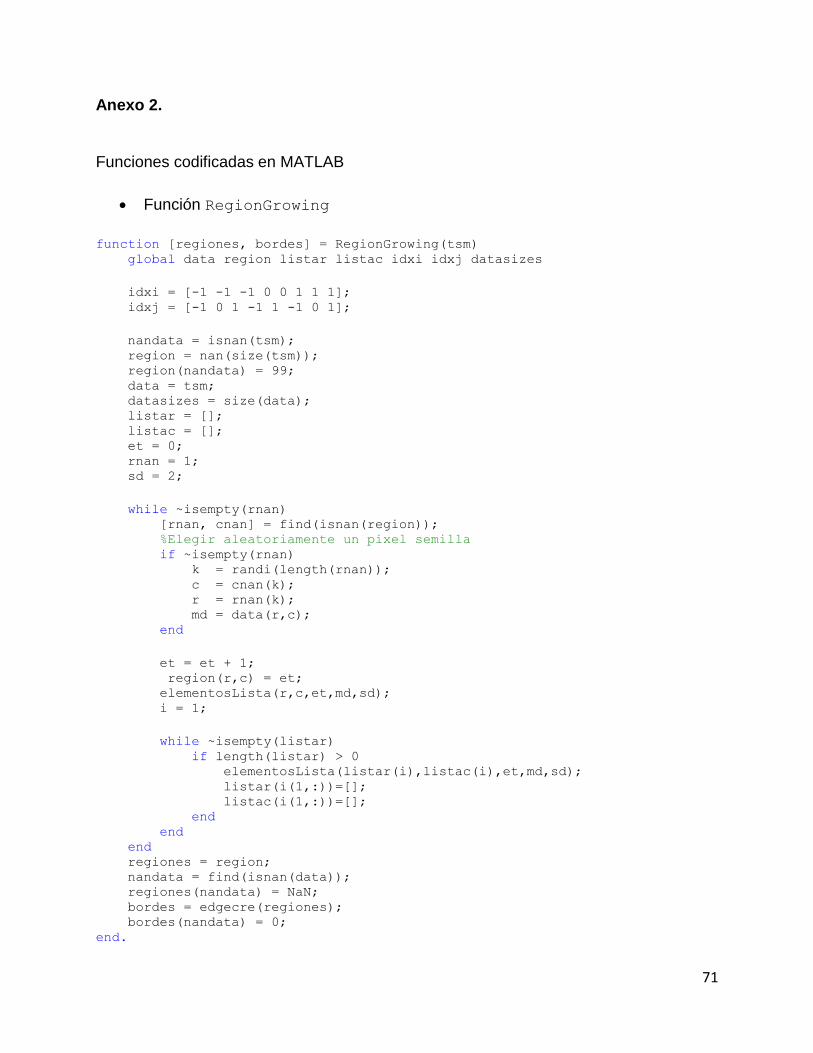
71
Anexo 2.
Funciones codificadas en MATLAB
Función RegionGrowing
function [regiones, bordes] = RegionGrowing(tsm) global data region listar listac idxi idxj datasizes
idxi = [-1 -1 -1 0 0 1 1 1]; idxj = [-1 0 1 -1 1 -1 0 1];
nandata = isnan(tsm); region = nan(size(tsm)); region(nandata) = 99; data = tsm; datasizes = size(data); listar = []; listac = []; et = 0; rnan = 1; sd = 2;
while ~isempty(rnan) [rnan, cnan] = find(isnan(region)); %Elegir aleatoriamente un pixel semilla if ~isempty(rnan) k = randi(length(rnan)); c = cnan(k); r = rnan(k); md = data(r,c); end
et = et + 1; region(r,c) = et; elementosLista(r,c,et,md,sd); i = 1;
while ~isempty(listar) if length(listar) > 0 elementosLista(listar(i),listac(i),et,md,sd); listar(i(1,:))=[]; listac(i(1,:))=[]; end end end regiones = region; nandata = find(isnan(data)); regiones(nandata) = NaN; bordes = edgecre(regiones); bordes(nandata) = 0; end.

72
Función elementos_lista
function [lista] = elementos_lista(r,c,T,et) global data region listar listac %Entrega una lista de coordenadas de los vecinos del pixel semilla %los cuales cumplen la condición idxi=[-1 -1 -1 0 0 1 1 1]; idxj=[-1 0 1 -1 1 -1 0 1]; datasizes=size(data);
for i=1:8 re=r+idxi(i); co=c+idxj(i); if (re>=1)&&(co>=1)&&(re<=datasizes(1))&&(co<=datasizes(2)) if isnan (region(re,co)) difer = abs(data(r,c)-data(re,co));
if difer <= T listar=[listar re]; listac=[listac co]; region(re,co)=et; pcolor(region), shading flat
end end end
end
end
Función edgecre function [b] = edgecre(p) % p es la matriz con las regiones etiquetadas, a las cuales se le detectara % los bordes m=size(p,1); n=size(p,2); b=zeros(m,n);
idxi=[0 1 0]; idxj=[1 1 1];
for i=2:m-1 for j=2:n-1 for k=1:3 f=i+idxi(k); c=j+idxj(k); if (p(f,c) ~= p(i,j)) b(i,j) = 1; break end
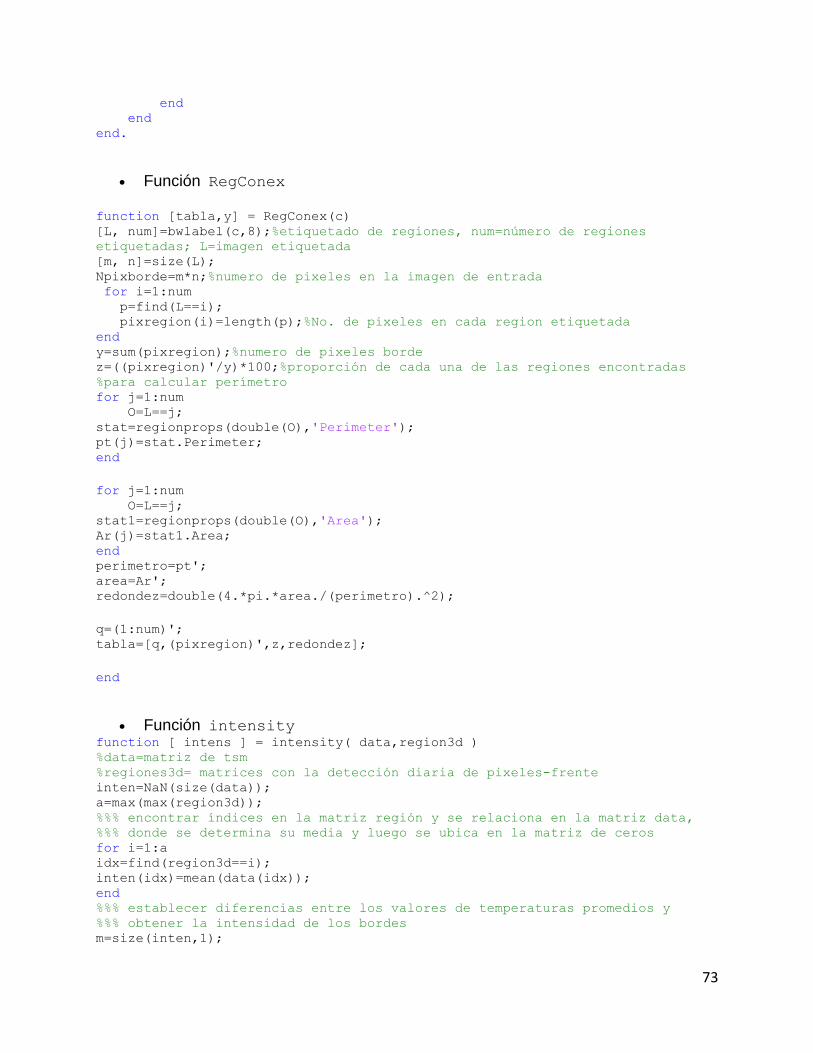
73
end end end.
Función RegConex function [tabla,y] = RegConex(c) [L, num]=bwlabel(c,8);%etiquetado de regiones, num=número de regiones
etiquetadas; L=imagen etiquetada [m, n]=size(L); Npixborde=m*n;%numero de pixeles en la imagen de entrada for i=1:num p=find(L==i); pixregion(i)=length(p);%No. de pixeles en cada region etiquetada end y=sum(pixregion);%numero de pixeles borde z=((pixregion)'/y)*100;%proporción de cada una de las regiones encontradas %para calcular perímetro for j=1:num O=L==j; stat=regionprops(double(O),'Perimeter'); pt(j)=stat.Perimeter; end
for j=1:num O=L==j; stat1=regionprops(double(O),'Area'); Ar(j)=stat1.Area; end perimetro=pt'; area=Ar'; redondez=double(4.*pi.*area./(perimetro).^2);
q=(1:num)'; tabla=[q,(pixregion)',z,redondez];
end
Función intensity function [ intens ] = intensity( data,region3d ) %data=matriz de tsm
%regiones3d= matrices con la detección diaria de pixeles-frente inten=NaN(size(data)); a=max(max(region3d)); %%% encontrar índices en la matriz región y se relaciona en la matriz data, %%% donde se determina su media y luego se ubica en la matriz de ceros for i=1:a idx=find(region3d==i); inten(idx)=mean(data(idx)); end %%% establecer diferencias entre los valores de temperaturas promedios y %%% obtener la intensidad de los bordes m=size(inten,1);
74
n=size(inten,2); intens=nan(m,n);
idxi=[0 1 0]; idxj=[1 1 1];
for i=2:m-1 for j=2:n-1 for k=1:3 f=i+idxi(k); c=j+idxj(k); if (inten(f,c) ~= inten(i,j)) intens(i,j)=abs(inten(f,c)-inten(i,j)); break end end end
end
Función findDist function [dist] = findDist(eLat,eLon,radio,imFronts,LAT,LON) [N,M] = size(imFronts); latlim = double([min(LAT(:)) max(LAT(:))]); lonlim = double([min(LON(:)) max(LON(:))]); R = makerefmat('RasterSize',[N,M],'Latlim',latlim,'Lonlim',lonlim); [rowEst, colEst] = latlon2pix(R,eLat,eLon); c = [fix(rowEst) fix(colEst)]; %fix(size(A) / 2); %# Ellipse center
point (y, x) r_sq = [radio,radio] .^ 2; %# Ellipse radii squared (y-axis, x-axis) ej:
[15,15] [X, Y] = meshgrid(1:M, 1:N); ellipseMask = double((r_sq(2) * (X - c(2)) .^ 2 + r_sq(1) * (Y - c(1))
.^ 2 <= prod(r_sq))); edgesMasked = imFronts.* ellipseMask; idx2search = find(edgesMasked==1); if isempty(idx2search) dist = NaN; else for i=1:length(idx2search) latdegRoi=LAT(idx2search(i)); londegRoi=LON(idx2search(i)); dist(i) =
distance(eLat,eLon,latdegRoi,londegRoi,earthRadius('meters')) / 1000; end end end