Parte I Memoria · proyecto forma parte de un conjunto de dos proyectos que completan el desarrollo...
138
1 Parte I Memoria ................................................................................... 3 Capítulo 1 Introducción ........................................................................ 4 1 Estudio de los trabajos existentes / tecnologías existentes ........................ 8 2 Motivación del proyecto ................................................................................. 20 3 Objetivos ........................................................................................................... 21 4 Metodología / Solución desarrollada ........................................................... 22 5 Recursos / herramientas empleadas ............................................................. 26 Capítulo 2 Diseño mecánico del robot aspirador ............................ 27 1 Diseño e implantación del brazo telescópico ............................................. 27 2 Elección e implantación unidad motora aspiración .................................. 33 3 Diseño servo-válvula de gestión aspiración .............................................. 41 4 Diseño carcasa exterior ................................................................................... 49 5 Elección motores tracción ............................................................................... 58 6 Diseño e implantación barredores laterales (Sweepers) .......................... 65 Capítulo 3 Diseño electrónico del robot aspirador ......................... 72 1 Diseño del actuador motor aspirador .......................................................... 72 2 Actuador barredores laterales (Sweepers): ................................................. 76 3 Diseño actuadores motores de tracción y brazo telescópico:................... 78 4 Diseño sensor luminosidad ........................................................................... 84 5 Diseño placa de alimentación ....................................................................... 91 6 Diseño placa aviso batería baja..................................................................... 93 Capítulo 4 Resultados/Experimentos ................................................ 94 Capítulo 5 Conclusiones.................................................................... 104 Capítulo 6 Futuros desarrollos ........................................................ 108 Bibliografía.............................................................................................. 114 Parte II Estudio económico.............................................................. 117
Transcript of Parte I Memoria · proyecto forma parte de un conjunto de dos proyectos que completan el desarrollo...

1
Parte I Memoria ................................................................................... 3
Capítulo 1 Introducción ........................................................................ 4
1 Estudio de los trabajos existentes / tecnologías existentes ........................ 8
2 Motivación del proyecto................................................................................. 20
3 Objetivos ........................................................................................................... 21
4 Metodología / Solución desarrollada........................................................... 22
5 Recursos / herramientas empleadas ............................................................. 26
Capítulo 2 Diseño mecánico del robot aspirador............................ 27
1 Diseño e implantación del brazo telescópico............................................. 27
2 Elección e implantación unidad motora aspiración .................................. 33
3 Diseño servo-válvula de gestión aspiración.............................................. 41
4 Diseño carcasa exterior ................................................................................... 49
5 Elección motores tracción............................................................................... 58
6 Diseño e implantación barredores laterales (Sweepers) .......................... 65
Capítulo 3 Diseño electrónico del robot aspirador......................... 72
1 Diseño del actuador motor aspirador .......................................................... 72
2 Actuador barredores laterales (Sweepers): ................................................. 76
3 Diseño actuadores motores de tracción y brazo telescópico:................... 78
4 Diseño sensor luminosidad ........................................................................... 84
5 Diseño placa de alimentación ....................................................................... 91
6 Diseño placa aviso batería baja..................................................................... 93
Capítulo 4 Resultados/Experimentos................................................ 94
Capítulo 5 Conclusiones.................................................................... 104
Capítulo 6 Futuros desarrollos ........................................................ 108
Bibliografía.............................................................................................. 114
Parte II Estudio económico.............................................................. 117
2
Parte III Manual de usuario.............................................................. 119
Parte IV Presupuesto Económico..................................................... 132
Parte V Data sheets .......................................................................... 138
3
Parte I MEMORIA

4
Capítulo 1 INTRODUCCIÓN
En este capítulo se hace una introducción. En el segundo capítulo y
tercero se describirá el desarrollo técnico realizado en el proyecto.
Como más adelante se concretará en el apartado de objetivos, este
proyecto forma parte de un conjunto de dos proyectos que
completan el desarrollo del robot aspirador inteligente. Con el fin de
dar una visión global del conjunto, se comentarán los principales
aspectos y características del prototipo desarrollado. Queda el lector
invitado a hojear la segunda parte de este proyecto titulada
“Software y Brazo Mecánico”.
El robot aspirador diseñado, nace de la necesidad de mejora de las
actuales aspiradoras inteligentes presentes en el mercado. Dichas
aspiradoras se ven incapaces de alcanzar ciertos rincones como bajos
de sillones, sillas, sofás etc… dejando una importante suciedad sin
eliminar. Para dar solución a este problema se recurre a la
implantación de un brazo telescópico, a la vez aspirador, en la
morfología típica, hasta hoy, de aspirador robótico.
La clave de la innovación se encuentra en el brazo telescópico.
Articulado por una antena eléctrica de automóvil y con una longitud
de setenta centímetros, realiza su despliegue según detecte la
necesidad o no. Para la discriminación de la utilización de dicha
extremidad, se han incorporado un conjunto de sensores infrarrojos.
En la figura siguiente puede observarse su colocación.

5
Figura 1: Disposición de sensores del
brazo telescópico
Figura 2: Detalle de sensores del brazo
telescópico
Además de los sensores mostrados en las dos figuras anteriores, se
incorporó un sensor de contacto en el extremo del primer segmento
del brazo telescópico. El cometido de este sensor, es la señalización al
control de la contracción del brazo en caso de fallo en el sensor
infrarrojo. Los sensores de contacto localizados en el extremo de la
boca de aspiración cumplen la misión de señalizar el choque con
obstáculos.
Para la dotación de inteligencia y el control del robot aspirador se
recurrió a un sistema tipo maestro-esclavo entre una PDA y una
microcontroladora denominada TCS (realizada en ICAI). En la PDA
residen los algoritmos programados en un lenguaje orientado a
objetos. La gestión y comunicación con los sensores la realiza la TCS.
Esta microcontroladora, va impulsada por dos microprocesadores
PIC, idénticos, de la marca Microchip. El siguiente esquema trata de
resumir la jerarquía de los elementos.
6
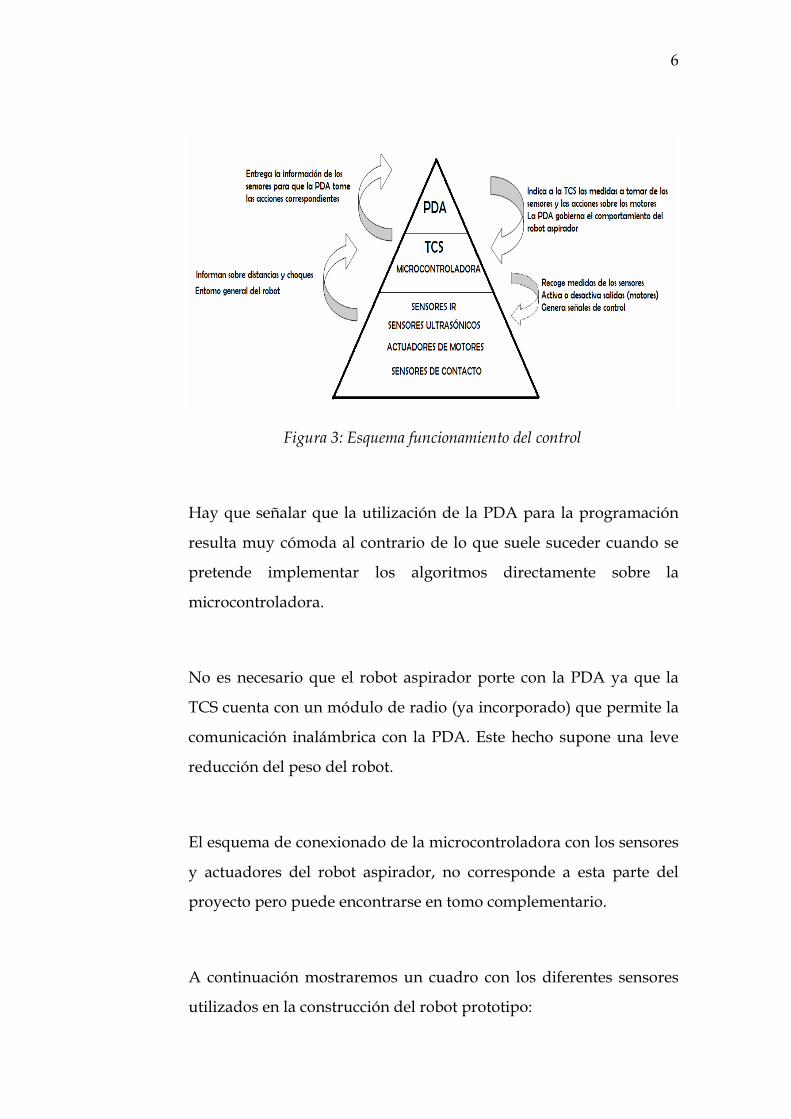
Figura 3: Esquema funcionamiento del control
Hay que señalar que la utilización de la PDA para la programación
resulta muy cómoda al contrario de lo que suele suceder cuando se
pretende implementar los algoritmos directamente sobre la
microcontroladora.
No es necesario que el robot aspirador porte con la PDA ya que la
TCS cuenta con un módulo de radio (ya incorporado) que permite la
comunicación inalámbrica con la PDA. Este hecho supone una leve
reducción del peso del robot.
El esquema de conexionado de la microcontroladora con los sensores
y actuadores del robot aspirador, no corresponde a esta parte del
proyecto pero puede encontrarse en tomo complementario.
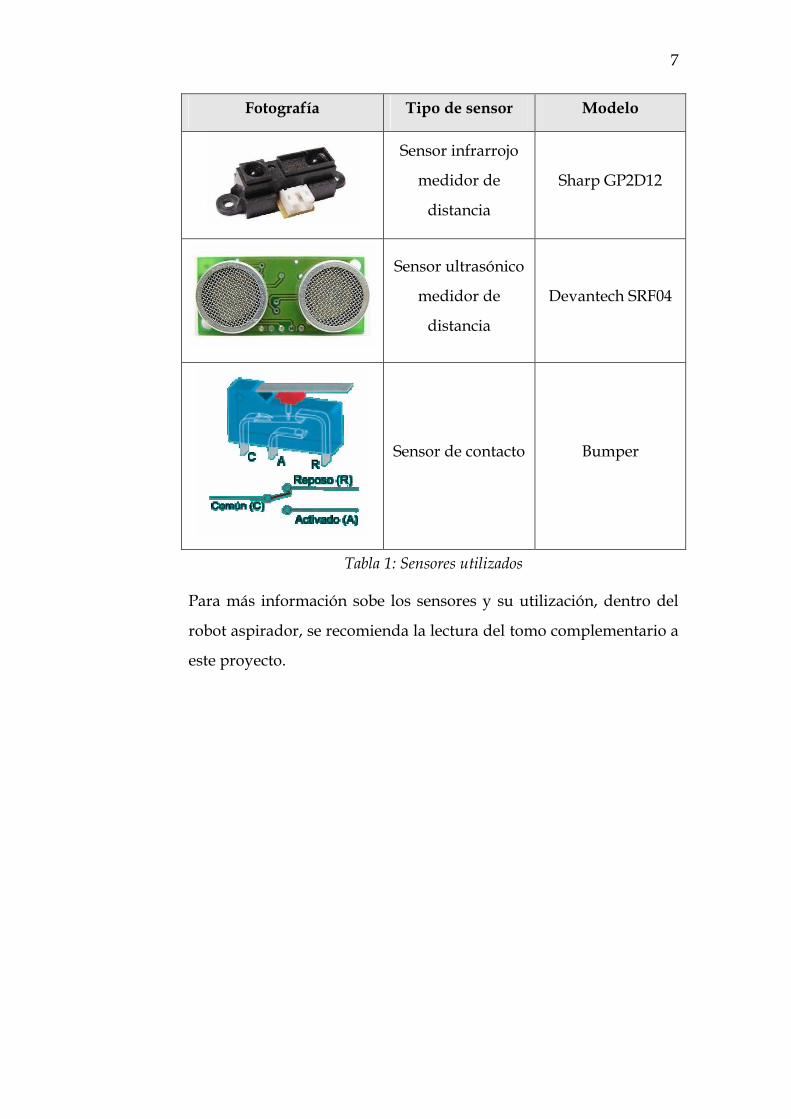
A continuación mostraremos un cuadro con los diferentes sensores
utilizados en la construcción del robot prototipo:
7
Fotografía Tipo de sensor Modelo
Sensor infrarrojo
medidor de
distancia
Sharp GP2D12
Sensor ultrasónico
medidor de
distancia
Devantech SRF04
Sensor de contacto Bumper
Tabla 1: Sensores utilizados
Para más información sobe los sensores y su utilización, dentro del
robot aspirador, se recomienda la lectura del tomo complementario a
este proyecto.

8
1 Estudio de los trabajos existentes / tecnologías
existentes
La robótica en general y la robótica móvil en particular es un
área de intenso estudio por la comunidad científica debido a las
múltiples aplicaciones que ofrece. En el uso cotidiano del término se
considera un robot a cualquier dispositivo mecánico que realiza
tareas automatizadas ya sea por medio de un programa, por
supervisión directa de un humano o mediante técnicas de
Inteligencia Artificial.
El empleo de brazos robóticos está implantado desde hace
tiempo en la industria moderna, siendo su utilización muy extendida
para la realización de tareas repetitivas o de riesgo: atornillar piezas,
pintar coches, realizar soldaduras, desplazar objetos pesados, etc.
Estos aparatos trabajan en entornos controlados y preparados
específicamente para ellos, a los que el operador humano no suele
tener acceso mientras están en funcionamiento. Aparte de los brazos
robóticos industriales, existen otras utilidades que se les están dando
cada vez con mayor frecuencia a máquinas de este tipo. Así, es cada
vez más habitual la utilización de brazos robóticos para realizar
operaciones quirúrgicas, sobre todo las relacionadas con la
microcirugía y cirugía no invasiva debido al alto grado de precisión
que se puede obtener. También se utilizan como implantes para
miembros amputados, dentro de la ingeniería biónica. Estos robots
tienen un grado de autonomía limitado y no se engloban en la
categoría de robots móviles autónomos estudiados en esta memoria.
Desde esta perspectiva, un robot es un agente con un cuerpo físico
con capacidades motrices y situado en un entorno real con el que el
robot interactúa. La autonomía en un agente de este tipo requiere de

9
capacidades complejas como trabajar durante largos periodos de
tiempo sin supervisión en entornos dinámicos en los que es
imposible predecir el estado del mismo. Esto implica a su vez
capacidad de navegar en el entorno, además de técnicas de
autoalimentación, detección de fallos, auto-regulación y auto-
generación de reglas de comportamiento. El grado de autonomía en
los robots móviles disponibles hoy día está todavía lejos de ajustarse
a esta definición. Es de destacar, que el estado del arte en el
desarrollo de sistemas robóticos autónomos no se corresponde con lo
que de ellos se espera por parte de la sociedad. Los avances en la
tecnología no se reflejan a la misma velocidad en la robótica móvil.
Seguramente, la pregunta más oída por un investigador del área en
ámbitos sociales sea: ¿Para cuándo uno que pase la aspiradora o que
corte el césped? Tareas que, aunque no triviales, no suponen grandes
dificultades, están lejos de ser realizadas por un robot móvil con un
grado de éxito satisfactorio.
Obviamente, las aplicaciones de este tipo de sistemas son
infinitas, desde robots guías en museos y centros públicos, hasta la
exploración marítima y espacial. Por otro lado, hoy en día se están
construyendo dentro de la robótica autónoma muñecas o mascotas
artificiales de compañía para personas mayores, debido a que en los
países desarrollados la esperanza de vida crece pero no el índice de
natalidad, lo que hace que existan cada vez más personas ancianas
que viven en soledad y que pudieran verse beneficiadas por robots
de este tipo. Así, se han construido robots imitando a “mamíferos”
que muestran cierto grado de sensibilidad en el trato con las
personas, pero suponen todavía un costo no abordable para lograr
un uso generalizado.
No hay soluciones “mágicas” para resolver los problemas; incluso

10
una tarea tan simple como la de evitar obstáculos depende
fuertemente tanto de la morfología del robot y de los sensores de que
dispone, como del propio entorno y del grado de dinamismo que
presenta el mismo. La navegación con objetivo en entornos con un
grado de estructuración pequeño, más allá del puro deambule, algo
casi “instintivo” para los animales, es uno de los mayores escollos a
resolver para conseguir robots fiables y convertirlos así en algo
rutinario en los espacios comunes.
Hasta prácticamente finales de los 80 el rumbo tomado para el
desarrollo de agentes autónomos se fundamentaba en la Inteligencia
Artificial. Se consideraba que, una vez conseguida la “mente artificial
inteligente”, el paso de añadirle un cuerpo a esa “mente” sería, si no
inmediato, un problema ingenieríl de menor dificultad. Claro reflejo
de esto es el vago número de referencias a robots físicos reales que
puede hallarse en la literatura de la época.
A finales de los 80, R. A. Brooks revolucionó el área atacando la
filosofía seguida hasta entonces desde su base. Postuló que para
conseguir robots autónomos inteligentes debe empezarse por
construir agentes físicos reales con capacidades básicas que puedan
actuar en entornos reales, y que una vez logrado ese objetivo, se
podría aspirar a ir aumentando las habilidades del robot y, en
definitiva, su grado de autonomía. La irrupción de las ideas de
Brooks dio lugar a lo que hoy día se conoce como Sistemas basados
en el comportamiento.
Centrándose en la situación de los robots aspiradores sería
lógico preguntarse:-“¿Qué diablos pasó para que los robots
aspiradores no empezasen a desarrollarse antes?”. De jóvenes

11
cuando se leían novelas de ciencia ficción, la imaginación proponía
que los robots ocuparían parte de lo común hoy día. En vez de esto
los robots han ocupado las tareas industriales más importantes como
la construcción de automóviles.
Desde el año 2001 han aparecido varios modelos que se han
ido desarrollando lentamente a la sombra del mercado para llegar
hoy a aspiradores robóticas como la Roomba Pro. Aunque Japón
siempre cuenta con la última palabra en robótica parece que se
inclinan más por conseguir robots de aspecto humanoide. Se
menciona este producto de la empresa iRobot por haberse convertido
en una referencia importante en lo que a aspiradoras robotizadas se
refiere. Roomba Pro ya se ofrece en dos colores distintos, con
habilidades de succión y barrido del polvo, recarga automática de
baterías y sensores de caída por escaleras. Cuando ésta aspiradora
encuentra un obstáculo gira 45º y continúa limpiando. El sistema de
aspiración seleccionado por iRobot es el de bolsa de aspiración en
seco (es la forma tradicional como sistema de aspiración). El robot se
maneja muy bien con suelos duros y alfombras poco altas y sin
flecos.
Figura 4: Detalle 1 sensores
ROOMBA Figura 5: Detalle 2 sensores ROOMBA

12
La estrategia de navegación adoptada por iRobot para Roomba es la
de inicio mediante espiral. Poco a poco, el robot va describiendo una
trayectoria circular con radio creciente (con forma de caracola) para
luego comenzar un algoritmo aleatorio de navegación por la
habitación al más puro estilo ping-pong. El comportamiento puede
describirse como “poco inteligente” recurriendo a una lógica reactiva
lo que se traduce en el sucesivo repaso de zonas concretas de la
habitación. Se preguntó al servicio de atención al cliente si pensaban
desarrollar algún algoritmo de navegación alternativo, a lo que
contestaron – al menos no en la versión de 230$. Roomba como el
resto de aspiradores robotizados del mercado sigue una navegación
aleatoria, dejando actuar la probabilidad y consiguiendo una
eficiencia del 95% de superficie aspirada en una habitación cuadrada
y sin obstáculos.
Figura 6: Algoritmo navegación
ROOMBA
Figura 7: Elementos de limpieza de
ROOMBA
iRobot se sirvió de un sistema operativo de menos de 256
bytes de memoria. (Menos que el propio logo de Microsoft
Windows). Con esta relativamente baja potencia de cálculo es capaz
de manejar sensores de infrarrojos (medidores de distancia), sensores
de contacto y sencillos algoritmos de escape ante “aprisionamientos”.
Cuando por alguna circunstancia no es capaz de encontrar una salida

13
apaga sus motores y emite un pitido de auxilio para ser rescatada
por algún ser humano.
Figura 8: Detalle motores ROOMBA Figura 9: Detalle cepillos ROOMBA
El sistema de acumulación de polvo del aspirador es relativamente
pequeño siendo muchas veces necesario su vaciado si la suciedad de
la habitación en cuestión es importante. La filosofía en éste aspecto es
la de mantener una limpieza continua y no dejar que la suciedad se
acumule.
iRobot también ha desarrollado últimamente algunos accesorios
como cepillos especiales, generadores de paredes virtuales (se trata
de un dispositivo que genera un rayo infrarrojo y evita que la
aspiradora atraviese dicha frontera) y mandos de control a distancia
para el robot.
Sus baterías tardan 12h en cargar y ofrecen una autonomía de hasta
90 minutos de aspiración al robot.
También debe mencionarse otros modelos de robot aspirador
inteligente que apuestan por otras tecnologías. El esquema siguiente
resume los modelos presentes hoy en el mercado.

14
Esquema 1: Oferta robots aspiradores del mercado
El apartado tecnológico al que se hace referencia en el esquema
superior merece especial mención. Hoy día existen tres maneras para
absorber la suciedad de nuestros hogares:
- Tecnología bolsa en seco (Tradicional)
Mediante una diferencia de presión
generada por un ventilador
eléctrico, el aire presente en la boca
de aspiración a presión ambiente se
introduce por la toma de aire a
través de los cepillos y de la bolsa
dejando en el filtro intermedio la
suciedad.
Las ventajas de éste método son el
bajo coste del material filtrante, el
bajo peso (comparado con otras
tecnologías) y la sencillez de diseño.

15
Los principales inconvenientes son la pérdida de eficiencia de
aspiración a medida que el filtro se obtura, el ruido del motor
aspirador y el retorno de partículas de polvo al ambiente en la
mayoría de los casos. También merece la pena destacar la
incomodidad que supone el cambio de las bolsas filtrantes y la
incapacidad de reutilización de las mismas. Es necesaria una gran
potencia eléctrica para el conjunto.
El método de bolsa en seco es el más extendido en el mundo de las
aspiradoras robóticas debido a su sencillez y a la ausencia de
patentes de ésta tecnología. Como ejemplos de productos aparecen
además de la comentada Roomba:
Foto Producto Descripción técnica
Smart Multi-Function Vacuum Cleaner
(TRV-10) con control remoto. Vuelve
automáticamente al punto de carga una
vez que detecta un nivel bajo de baterías.
Con variedad de programas de limpieza
(semanal, diaria etc..). Posibilidad de
alargar el periodo de limpieza para
grandes superficies. El control remoto
permite guiar el aspirador hacia lugares
específicos.

16
Las características del AV-838 son el
detector anti-caída por escaleras, detector
virtual de paredes, sensor seguimiento de
paredes, función de control remoto.
Tensión de entrada al cargador :100-240V
AC ,Tensión salida del cargador:24C DC
Tensión en baterías:14.4V . Potencia
media de la unidad 23 W. Tiempo recarga
5h. Autonomía 50-70 minutos.
Ubot propone la siguiente aspiradora:
Funciones de señalización con voz digital.
Seguidor de paredes. Especificaciones:
dimensiones: 42 x 18cm. Peso:
8.12kg.Cargador externo: AC 100-
240V.Salida del cargador: DC 19V,
3.16A.Tensión en baterías: 14.4V.potencia
del motor: 60W
Tiempo de recarga 4 horas máximo.
Autonomía 100 minutos. Velocidad:
0.2m/sec. Volumen bolsa aspiración 0.7L.
Tipo de baterías Li-ion recargable.
Aspiradora de VS Electronics.
Altura 98mm. Autonomía 58min. Peso
3.4kgs. Tiempo de recarga 3hrs. Ruido
65DB.El peso es de 1Kg. Capacidad bolsa
de aspiración 0.7L. Potencia de aspirador
30W. Velocidad 0.2m/s Baterías
recargables de Ni-MH. El tamaño de la
habitación es configurable. Se carga
manualmente. Función de control remoto.
Tabla 2: Características modelos presentes en el mercado
17
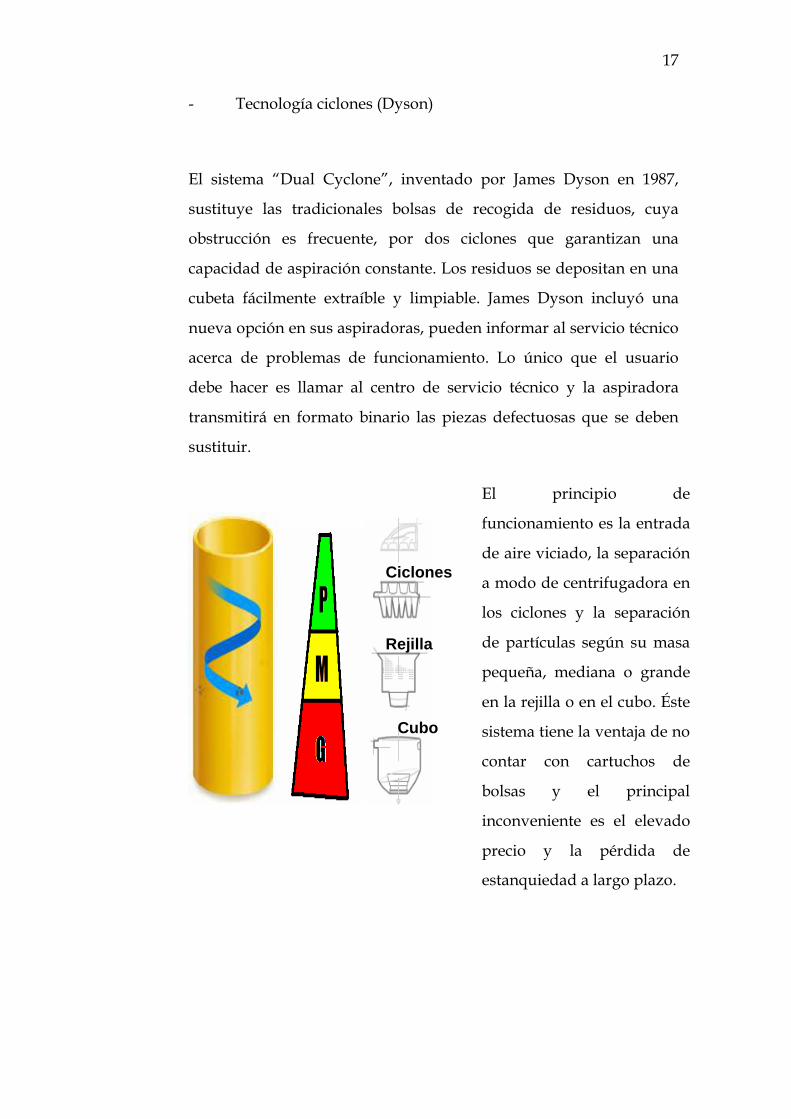
- Tecnología ciclones (Dyson)
El sistema “Dual Cyclone”, inventado por James Dyson en 1987,
sustituye las tradicionales bolsas de recogida de residuos, cuya
obstrucción es frecuente, por dos ciclones que garantizan una
capacidad de aspiración constante. Los residuos se depositan en una
cubeta fácilmente extraíble y limpiable. James Dyson incluyó una
nueva opción en sus aspiradoras, pueden informar al servicio técnico
acerca de problemas de funcionamiento. Lo único que el usuario
debe hacer es llamar al centro de servicio técnico y la aspiradora
transmitirá en formato binario las piezas defectuosas que se deben
sustituir.
Ciclones
Rejilla
Cubo
El principio de
funcionamiento es la entrada
de aire viciado, la separación
a modo de centrifugadora en
los ciclones y la separación
de partículas según su masa
pequeña, mediana o grande
en la rejilla o en el cubo. Éste
sistema tiene la ventaja de no
contar con cartuchos de
bolsas y el principal
inconveniente es el elevado
precio y la pérdida de
estanquiedad a largo plazo.
18
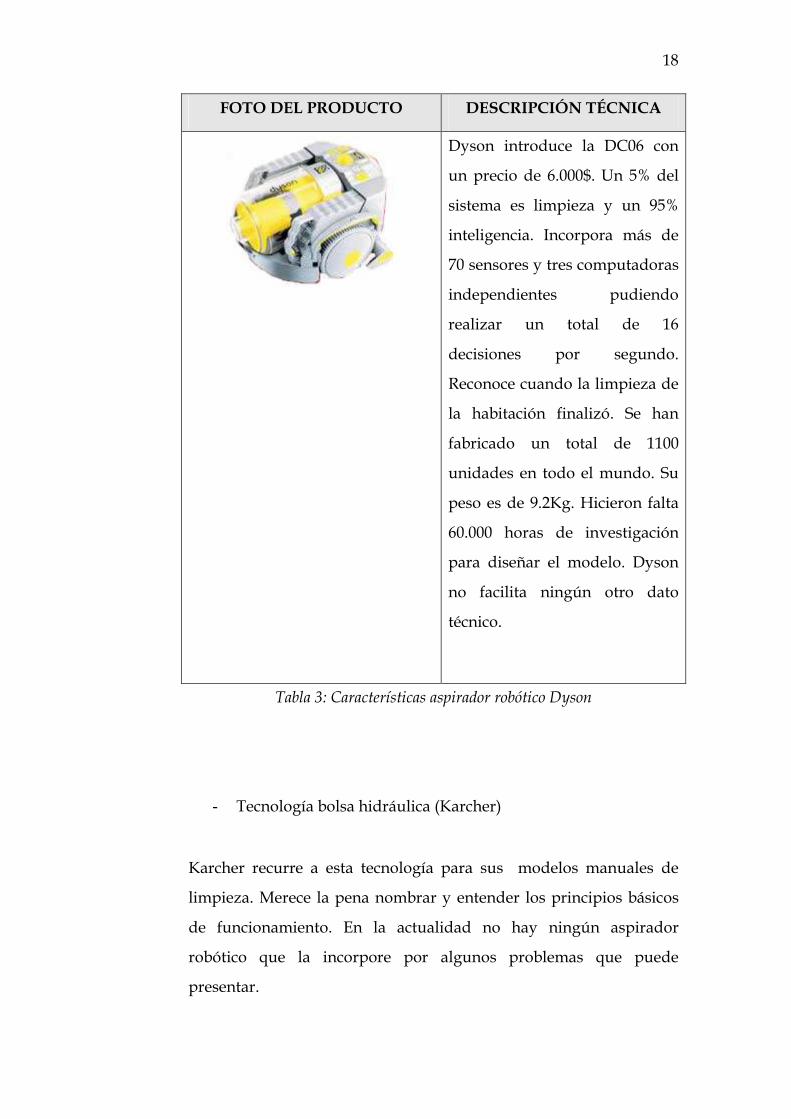
FOTO DEL PRODUCTO DESCRIPCIÓN TÉCNICA
Dyson introduce la DC06 con
un precio de 6.000$. Un 5% del
sistema es limpieza y un 95%
inteligencia. Incorpora más de
70 sensores y tres computadoras
independientes pudiendo
realizar un total de 16
decisiones por segundo.
Reconoce cuando la limpieza de
la habitación finalizó. Se han
fabricado un total de 1100
unidades en todo el mundo. Su
peso es de 9.2Kg. Hicieron falta
60.000 horas de investigación
para diseñar el modelo. Dyson
no facilita ningún otro dato
técnico.
Tabla 3: Características aspirador robótico Dyson
- Tecnología bolsa hidráulica (Karcher)
Karcher recurre a esta tecnología para sus modelos manuales de
limpieza. Merece la pena nombrar y entender los principios básicos
de funcionamiento. En la actualidad no hay ningún aspirador
robótico que la incorpore por algunos problemas que puede
presentar.

19
FOTO DEL PRODUCTO DESCRIPCIÓN
TÉCNICA
Aspiradora Robot
Robocleaner 3000. Cuenta
con una autonomía de 60
minutos. El peso del
conjunto son 2Kg. El
depósito del acumulador de
suciedad es de 0.2L.Las
dimensiones son Ø
280x105 mm .La tensión de
servicio empleada es de
12V. Su precio ronda los
1500€. Limpia unos 15
metros cuadrados a la hora.
Cuenta con un programa
especial para el
reconocimiento de los flecos
El principio de funcionamiento es el
establecimiento de una diferencia
de presión utilizando un ventilador.
Las partículas y el aire procedentes
del exterior se introducen por el
canal de aspiración. El ventilador se
encuentra situado en la parte más
alta de la aspiradora de tal manera
que únicamente las partículas más
livianas son capaces de ascender
por el canal de ventilación siendo
las más gruesas atrapadas en el
recipiente de agua.

20
de alfombra para no quedar
enganchado con ellos. La
estación de mando cuenta
con un depósito de suciedad
de 2L que va llevando según
se recarga la unidad móvil.
El sistema de navegación se
basa en rayos infrarrojos.
Cuenta con una potencia de
aspiración de 18W.
La velocidad máxima es de
20cm por segundo.
Tabla 4: Aspirador robótico Robocleaner 3000
El mercado no reaccionó tan mal como se esperaba los últimos
5 años vendiéndose entre 2002 y 2003 un total de 570.000 unidades.
La proyección de futuro para éste mercado entre 2003 y 2007 son 4.1
millones de aspiradores vendidas con una valor total de más de 4
billones de dólares.
2 Motivación del proyecto
Trabajar con robots exige un conocimiento multidisciplinar. Si bien la
Electrónica y la Informática acaparan un buen porcentaje de las
materias que implica la Robótica, es muy conveniente y beneficioso
tener ideas y habilidades en Mecánica, Sensores, Comunicaciones,
Motores e Inteligencia Artificial. Esta combinación de disciplinas
constituye un excelente valor formativo para cualquier ingeniero.
El proyecto “Construcción de una aspiradora inteligente para la
limpieza automática de las casas” pretende introducir una
importante mejora en un producto muy innovador por si mismo.

21
Pocas son las familias que hoy disponen de una aspiradora
inteligente en sus domicilios, pero no debemos subestimar un
mercado que movió más de 4.1Billones de dólares en 2006 creciendo
a un ritmo del 9% desde 2001.
La aspiradora que se plantea construir no se encuentra aún en el
mercado, la idea de introducir un brazo telescópico en un robot
aspirador es innovadora y muy desafiante. Encajar el brazo
telescópico persigue, fundamentalmente, el aumento de superficie
disponible de aspiración ante los problemas de accesibilidad a ciertos
rincones de las aspiradoras robóticas tradicionales.
El entorno de funcionamiento del robot aspirador es uno de los más
difíciles para navegar; las sillas, escaleras y demás obstáculos,
configuran un entorno muy desetructurado y al mismo tiempo
interesante para estudiar.
La construcción del aspirador robótico que se plantea, parte de cero y
pretende abrir una nueva línea de proyectos en la Universidad
Pontificia de Comillas. Las posibilidades para futuros desarrollos son
enormes, pudiendo mejorar los resultados que se obtengan en este
proyecto hasta alcanzar un producto casi comercial.
3 Objetivos
El objetivo principal del proyecto es el diseño y construcción de una
aspiradora inteligente para la limpieza automática de las casas. Este
objetivo también contempla la introducción de un brazo telescópico
22
en dicho robot aspirador para la mejora de la superficie efectiva de
aspiración en los hogares.
Para la consecución del objetivo principal el proyecto se divide en
dos proyectos:
• Diseño electromecánico y electrónico del robot aspirador. • Programación y control del brazo telescópico.
El presente proyecto resuelve el diseño electromecánico y electrónico
del robot aspirador. Para ello se divide en dos sub-objetivos:
• Diseño e implantación de elementos electromecánicos:
-Diseño y construcción de la estructura exterior general del
robot aspirador.
-Diseño y construcción del brazo telescópico.
-Selección e implantación de motores, servomecanismos etc…
• Diseño e implantación de elementos electrónicos:
-Diseño y construcción de los distintos actuadores para los
motores del robot aspirador.
4 Metodología / Solución desarrollada
El proyecto fin de carrera “Construcción de una aspiradora
inteligente para la limpieza automática de las casas” se plantea
con una duración aproximada de nueve meses.

23
La construcción del robot aspirador va acompañada de un
alto componente de ingeniería de diseño, fabricación de
estructura, implantación de distintos elementos y pruebas de
funcionamiento.
La metodología para la el alcance del objetivo principal se
basa en la consecución de cuatro fases para cada uno de los
módulos a incorporar en el robot aspirador. Estas fases son:
1. Diseño teórico del elemento y contraste con otras alternativas.
2. Fabricación o simulación mediante ordenador del diseño teórico anterior.
3. Prueba del elemento una vez integrado en el conjunto aspirador.
4. Contraste de los resultados con otras alternativas de diseño ya experimentadas.
Esta metodología es imprescindible ya que se trata del diseño
de un producto innovador del que no se conoce ninguna
referencia en el mercado.
La metodología y el calendario de comienzo y finalización de
cada tarea puede observarse en la tabla incluida al final de
este apartado. Básicamente consta de dos bloques:
• Diseño y construcción electromecánica y electrónica.
• Programación y dotación de inteligencia al robot aspirador.

24
Hay que señalar que el objetivo del proyecto pudo alcanzarse
gracias a la división en dos subproyectos. Fue necesaria la
plena colaboración con el proyecto de programación del
robot aspirador ya que las decisiones influían de manera
directa en ambos proyectos.
La solución desarrollada es la incorporación de un brazo
telescópico, de 70 centímetros de longitud, transversal al
sentido de la marcha del robot aspirador, articulado con la
ayuda de una antena eléctrica de automóvil. También, se
introdujo una servo-válvula para poder seleccionar si la
aspiración se realiza por la base del robot o por el extremos
del brazo telescópico.
La potencia del robot aspirador prototipo construido es de
60W ofreciendo una autonomía aproximada de
funcionamiento de 20 minutos. El peso final del conjunto es
de 8.5 Kg. El control se realiza mediante una PDA y una
microcontroladora desarrollada por ICAI y denominada
TCS.
A continuación se presenta el calendario de actuación de
cada tarea:

25
5 Recursos / herramientas empleadas
La realización del proyecto incorpora un fuerte componente de diseño e
implantación mecánica. También integra el diseño de varios actuadores y
sensores de categoría eléctrica-electrónica.
El proyecto fue financiado prácticamente en su totalidad por la
Universidad Pontificia de Comillas. La mayoría de materiales son de
origen reciclado para reducir el impacto medioambiental de su
construcción.
La parte de diseño mecánico se resolvió con la utilización de una
herramienta software en tres dimensiones: “3D Studio Max R4”. Dicha
herramienta fue determinante para la simulación del movimiento del
brazo telescópico. En la Universidad Pontificia de Comillas no se
encuentra disponible la licencia de este paquete, se realizó en un
ordenador particular externo a la universidad
La construcción del robot aspirador incluye la utilización de toda clase de
herramientas y máquinas herramientas. Martillos, serretas, taladradoras,
sierras de pelo etc… fueron necesarias para el traslado a la realidad del
robot aspirador diseñado previamente.
El diseño electrónico se realizó con SPICE, una herramienta de simulación
electrónica. La gran parte de las placas se simularon antes de su
realización física. La realización de las placas conlleva la utilización de
soldadores de 25W eléctricos, multímetros de medida eléctrica y fuentes
reguladas de alimentación y de señal.

Memoria. Diseño mecánico del robot aspirador 27
Capítulo 2 DISEÑO MECÁNICO DEL ROBOT
ASPIRADOR
El diseño mecánico del robot aspirador es el aspecto más estudiado y más
desafiante del proyecto. La morfología del robot configura su
comportamiento y determina su eficacia, en gran medida, en la limpieza
del hogar. A continuación, se irán explicando detallada y sucesivamente
los procedimientos seguidos para el diseño y la implantación de cada unos
de los elementos mecánicos del robot aspirador prototipo. Los elementos
mecánicos distinguidos son el brazo telescópico, la unidad motora de
aspiración, servo-válvula gestión aspiración, carcasa exterior, motores de
tracción y barredores laterales.
1 Diseño e implantación del brazo telescópico
La incorporación de un brazo a la aspiradora fue una idea del director del
proyecto que surgió en el año 2005. El diseño actual del brazo se basa en el
diseño realizado en el año 2005-06 en el IIT
El brazo telescópico de la aspiradora robótica supone un componente de
innovación tecnológica que hasta ahora no había en el mercado. La
necesidad de mejorar la superficie efectiva de aspiración de los modelos
que hoy día se comercializan hizo surgir la idea de su utilización. Para su
diseño se debe responder a ciertas preguntas clave: ¿Debería ser articulado
o fijo? ¿Qué longitud total se precisa? ¿Qué materiales son los más
adecuados para su fabricación? ¿Qué posición debe ocupar en el robot
aspirador?
Memoria. Diseño mecánico del robot aspirador 28
El proceso de diseño fue largo y tedioso ya que se recurrió a la
experimentación para el contraste de la calidad de las soluciones.
Transcurridos los experimentos se alcanzó la solución considerada más
adecuada. Se trata de un brazo telescópico con movimiento prismático,
plegable instantáneamente, articulado mediante una antena eléctrica de
automóvil y formado por tres segmentos de distinta sección, que se
introducen uno dentro del otro para quedar retraídos en una longitud
aproximada de 35cm. La longitud máxima alcanzada, con el despliegue de
sus tres segmentos, es de aproximadamente setenta centímetros. El
segmento tubular de menor diámetro porta la boca de aspiración del brazo
telescópico.
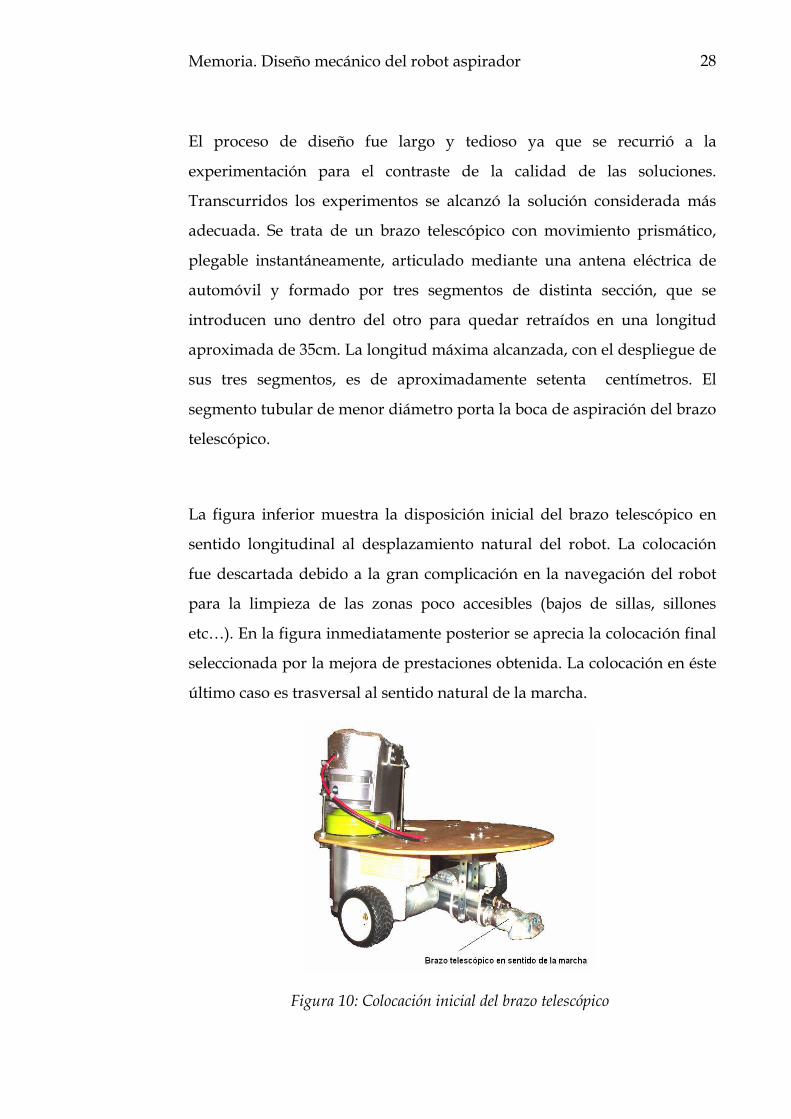
La figura inferior muestra la disposición inicial del brazo telescópico en
sentido longitudinal al desplazamiento natural del robot. La colocación
fue descartada debido a la gran complicación en la navegación del robot
para la limpieza de las zonas poco accesibles (bajos de sillas, sillones
etc…). En la figura inmediatamente posterior se aprecia la colocación final
seleccionada por la mejora de prestaciones obtenida. La colocación en éste
último caso es trasversal al sentido natural de la marcha.
Figura 10: Colocación inicial del brazo telescópico

Memoria. Diseño mecánico del robot aspirador 29
Figura 11: Colocación final del brazo telescópico en robot aspirador teórico
En la versión de prototipo se utilizó una antena eléctrica solidaria
longitudinalmente al brazo para lograr el movimiento prismático de sus
articulaciones. Dicha antena fue obtenida de un desguace de automóviles.
Sus características principales son 12V de tensión nominal y 12W de
potencia nominal. Plenamente desplegada, alcanza una longitud de 2m lo
cual obliga a establecer medidas para limitar su extensión a la longitud del
brazo telescópico. La longitud del brazo telescópico fue limitada a 1 metro
por las características de los materiales utilizados para su construcción.
Fueron utilizados materiales plásticos de PVC, aunque cuentan con buena
rigidez y relativamente bajo peso, únicamente se comercializan en unos
diámetros y grosores determinados. Este hecho, hizo que la pérdida de
carga resultase apreciable por los pequeños huecos existentes entre las
uniones de los segmentos que configuran el brazo telescópico. Para la
versión final, se propone confeccionar un brazo de mayor calidad con
tubos de aleación en Duraluminox de gran resistencia, anodinados en tres
capas con calidad de aviación.

Memoria. Diseño mecánico del robot aspirador 30
Figura 12: Detalle antena eléctrica de automóvil utilizada
El anclaje del brazo telescópico a la aspiradora robot se realiza bajo la base
y transversalmente al sentido natural de marcha de dicho robot. La
argumentación de la elección de la disposición del brazo se fundamenta en
la obtención de un barrido completo en dos dimensiones, mediante la
extensión del brazo telescópico en una dirección y el avance de la
aspiradora robótica en el otro. Es trascendental, que el brazo telescópico
una vez retraído no sobresalga de la vista en planta del aspirador.
Figura 13: Esquema movimiento general del robot
El tamaño de partícula máxima aspirada viene determinada por el
diámetro de la última sección (que empuña la boca de aspiración) que
resulta ser de 24mm en la versión prototipo.

Memoria. Diseño mecánico del robot aspirador 31
Figura 14: Brazo telescópico prototipo Figura 15: Vista inferior colocación
brazo telescópico
El mantenimiento del brazo telescópico debe realizarse periódicamente ya
que se trata de un elemento dotado de articulaciones y expuesto
continuamente a la suciedad. Los segmentos se desmontan separando los
tubos con un movimiento brusco y seco. Mediante un bastoncito
impregnado con alcohol deben limpiarse cuidadosamente las juntas de
goma que garantizan la estanquiedad del conjunto. Antes de armar de
nuevo el conjunto, se pasa un fino bastón al que se le enrollará un pedazo
de tela o estopa impregnada con un aceite fino (los mismos bastones que
son utilizados para limpiar un arma - se puede fabricar con un bastón de
madera o comprarlo en una armería) por las uniones entre los segmentos.
Pasar un capa de spray tipo WD4 ó similar y empezar de la misma
operación de limpieza interna de los tubos. Limpiar bien los conos de
presión y la superficie de los tubos con el mismo aceite fino - No utilizar
gasolina o productos detergentes. Engrasar los empaques y el interior de
los tubos con grasa de silicona y remontar con un movimiento de la mano
dando un golpe seco en la punta de los tubos a fin de ensamblarlos uno
dentro del otro. Deslizar los tubos uno dentro del otro varias veces a fin de
engrasar sus paredes internas. Limpiar con un trapo seco el exceso de
grasa que pudiera encontrarse en la parte externa del brazo. Siempre se

Memoria. Diseño mecánico del robot aspirador 32
aconseja, después de utilizarlo, pasar un trapo sobre el brazo antes de
plegarlo después de su mantenimiento.
Finalmente se muestra una fotografía esquematizada con el
emplazamiento final del brazo telescópico.
Figura 16: Esquema emplazamiento final del brazo telescópico
La figura 16 muestra los tres segmentos que configuran el brazo
telescópico, la antena eléctrica de automóvil solidaria al brazo para
conseguir su movimiento y la boca de aspiración.

Memoria. Diseño mecánico del robot aspirador 33
2 Elección e implantación unidad motora aspiración
La unidad motora de aspiración es el elemento fundamental del robot
aspirador. La aspiradora es la encargada de provocar la diferencia de
presión necesaria para elevar la suciedad del suelo e introducirla en la
bolsa de aspiración.
En la actualidad los aspiradores normalmente llevan incorporados uno de
los siguientes motores para realizar la aspiración de partículas:
-Motores de aspiración directa:
Aquellos que se refrigeran con el mismo aire de aspiración. Estos motores
no son adecuados para la aspiración de líquidos. Es muy importante evitar
la saturación del filtro de aspiración, para facilitar la refrigeración del
motor. Los parámetros constructivos más importantes son el número de
turbinas, el voltaje, la potencia, el alto de turbina, el alto total y el sistema
de fijación al conjunto (presión o tornillo).
Figura 17: Fotografía motor aspiración directa

Memoria. Diseño mecánico del robot aspirador 34
-Motores by-pass periféricos:
Tienen dos circuitos de aire. El aire que refrigera el motor eléctrico, por
medio de unas aspas situadas encima del motor, es independiente al de la
aspiración. El aire de aspiración es evacuado lateralmente, no debe
comunicarse con la parte eléctrica. Salida de aire periférica. Los
parámetros constructivos más importantes son el número de turbinas, el
voltaje, la potencia, el alto de turbina, el alto total y el sistema de fijación al
conjunto (presión o tornillo).
Figura 18: Fotografía motor by-pass periféricos
-Motores by-pass-tangenciales:
Tienen dos circuitos de aire. El aire que refrigera el motor eléctrico, por
medio de unas aspas situadas encima del motor, es independiente al de la
aspiración. El aire de aspiración es evacuado lateralmente, no debe
comunicarse con la parte eléctrica. Salida de aire tangencial. . Los
parámetros constructivos más importantes son el número de turbinas, el
voltaje, la potencia, el alto de turbina, el alto total y el sistema de fijación al
conjunto (presión o tornillo).
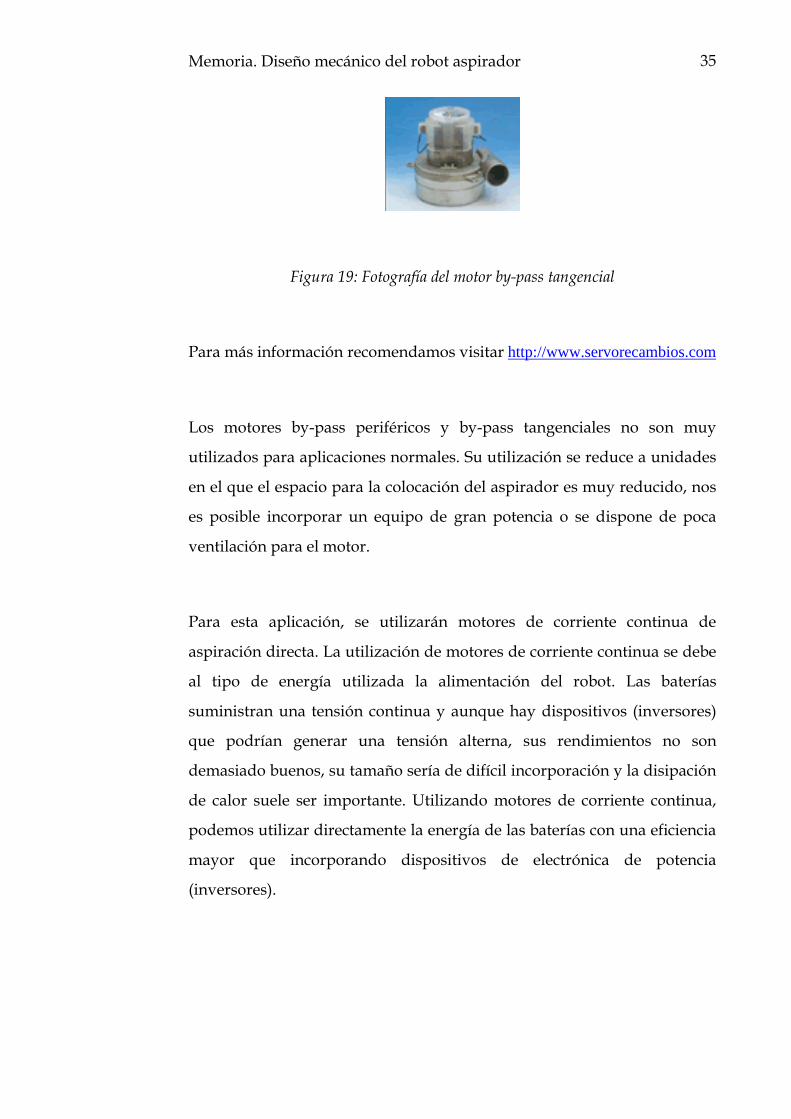
Memoria. Diseño mecánico del robot aspirador 35
Figura 19: Fotografía del motor by-pass tangencial
Para más información recomendamos visitar http://www.servorecambios.com
Los motores by-pass periféricos y by-pass tangenciales no son muy
utilizados para aplicaciones normales. Su utilización se reduce a unidades
en el que el espacio para la colocación del aspirador es muy reducido, nos
es posible incorporar un equipo de gran potencia o se dispone de poca
ventilación para el motor.
Para esta aplicación, se utilizarán motores de corriente continua de
aspiración directa. La utilización de motores de corriente continua se debe
al tipo de energía utilizada la alimentación del robot. Las baterías
suministran una tensión continua y aunque hay dispositivos (inversores)
que podrían generar una tensión alterna, sus rendimientos no son
demasiado buenos, su tamaño sería de difícil incorporación y la disipación
de calor suele ser importante. Utilizando motores de corriente continua,
podemos utilizar directamente la energía de las baterías con una eficiencia
mayor que incorporando dispositivos de electrónica de potencia
(inversores).

Memoria. Diseño mecánico del robot aspirador 36
Las aspiradoras inteligentes cuentan con una ventaja fundamental
respecto a las aspiradoras manuales, no necesitan elevar la suciedad a
grandes alturas ya que su diseño se concibe muy cercano al suelo. Esto se
traduce en un decremento substancial en la potencia de aspiración
necesaria ,debido a la desaparición de codos en el circuito de aspiración (el
emplazamiento de los canales es fijo, no como en el caso de las aspiradoras
manuales que se forman nudos y estricciones en las mangueras etc..) y a la
consecuente reducción del consumo de energía por partícula aspirada.
Figura 20: Esquema comparativo aspirador manual y robot aspirador
Aunque los sistemas de aspiración no han sufrido cambios substanciales
en los casi cien años que llevan en el mercado, sí han aparecido
alternativas a la ya tradicional aspiradora en seco eléctrica. Entre los
sistemas alternativos destaca el sistema Double Cyclone propuesto por
Dyson. El principio de funcionamiento ha sido descrito en el capítulo
primero apartado uno del presente proyecto explicando sus ventajas e
inconvenientes.

Memoria. Diseño mecánico del robot aspirador 37
En la construcción del robot aspirador prototipo debía encontrarse un
motor de aspiradora convencional que operara mediante motor eléctrico
de corriente continua. La potencia fue la principal incógnita para elección
del motor aspirador. Se recurrió a la experimentación con algunos
modelos para selección del más apropiado. Entre los modelos probados se
encuentran la Moulinex CEN-1.41 Pronto y la Balai Sweeper Ns130.
Moulinex CEN-1.41 Pronto CARACTERÍSTICAS
Potencia de aspiración: 60W
Tipo aspirador : portátil manual
Capacidad depósito:0.5 L
Precio de venta: 74.5€
Tipo baterías: plomo-ácido
Potencia variable: NO
Nivel de ruido: 73dB
Tabla 5: Apirador Moulinex
Balai Sweeper Ns130. CARACTERÍSTICAS
Potencia de aspiración: 25W
Tipo aspirador : portátil manual
Capacidad depósito:0.3 L
Precio de venta: 42€
Tipo baterías: recargables AA, LR06
Potencia variable: NO
Nivel ruido: No disponible
Tabla 6: Aspirador Balai

Memoria. Diseño mecánico del robot aspirador 38
Los dos modelos representados en las figuras anteriores simbolizan a dos
familias diferentes de aspiradores portátiles. La aspiradora Moulinex es de
diseño anterior a la Balai. Moulinex apuesta en el modelo por la colocación
de la bolsa de aspiración en la parte más cercana a la empuñadura del
usuario lo que, en parte, justifica la diferencia de potencia con el motor de
Balai. El otro modelo analizado (Balai) es de potencia claramente inferior,
pero lleva la bolsa de aspiración incluida en el conjunto base de
aspiración. Incluir en la base la bolsa de aspiración tiene como
consecuencias la reducción de potencia necesaria de aspiración, la
complicación del diseño de la bolsa de aspiración para optimizar su
capacidad y la reducción del consumo de potencia.
Balai Sweeper Ns130 basa no basa su eficacia en su unidad aspiradora. Un
complicado e ingenioso sistema de rodillos y cepillos arrastra
mecánicamente la suciedad hacia el recipiente. Últimamente, muchas
aspiradoras inteligentes incorporan el sistema de rodillos y cepillos por ser
más eficiente en relación potencia necesaria y limpieza de partículas. El
inconveniente principal de agregar al robot el sistema, es el aumento de
complejidad en el diseño general para su incorporación en la estructura
base.
Finalmente, se optó por incorporar el motor aspirador de la Moulinex
CEN-1.41 Pronto. Su relativa alta potencia de aspiración compensaba las
pérdidas en la servo-válvula de gestión de aspiración y con sus baterías la
autonomía superaba los veinte minutos.
El siguiente cuadro compara las potencias utilizadas en varios aspiradores
presentes hoy en el mercado.

Memoria. Diseño mecánico del robot aspirador 39
MODELO POTENCIA ASPIRACIÓN
UBOT
60W
VS Electronics
30W
Robot Robocleaner
18W
ROOMBA
25W
Tabla 7: Comparativa potencias robots aspiradores
El prototipo aspirador se situaría al nivel de UBOT que también considera
necesario para su diseño la incorporación de un motor de 60W.
La implantación del motor aspirador dentro del robot puede apreciarse en
la figura siguiente:

Memoria. Diseño mecánico del robot aspirador 40
Figura 21: Implantación del motor aspirador en la versión prototipo.
La sujeción se realizó mediante tornillos y tres puntos de anclaje. Es
importante prestar especial cuidado al acoplamiento entre el motor
aspirador y la bolsa de aspiración para reducir al máximo las pérdidas de
succión.

Memoria. Diseño mecánico del robot aspirador 41
3 Diseño servo-válvula de gestión aspiración
La introducción del brazo telescópico supone la apertura de nuevas
posibilidades para los métodos de aspiración de las aspiradoras robóticas.
En un principio, se pensó realizar la aspiración únicamente por el extremo
del último segmento del brazo pero apareció la inquietud de gestionar dos
comportamientos de aspiración atendiendo a las necesidades de cada
momento. Así, comenzó el diseño de un elemento mecánico que en
contacto con la unidad de control pudiese seleccionar indistintamente una
aspiración por la base del robot o por el brazo telescópico. Una válvula
parecía ser la mejor opción pero: ¿Qué tipo de válvula utilizar?
Una válvula se puede definir como un aparato mecánico con el cual se
puede iniciar, detener o regular la circulación (paso) de líquidos o gases
mediante una pieza movible que abre, cierra u obstruye en forma parcial
uno o más orificios o conductos.
Las válvulas, son unos de los instrumentos de control más esenciales en la
industria. Debido a su diseño y materiales, las válvulas pueden abrir y
cerrar, conectar y desconectar, regular, modular o aislar una enorme serie
de líquidos y gases, desde los más simples hasta los más corrosivos o
tóxicos. Sus tamaños van desde una fracción de pulgada hasta 30 ft (9 m) o
más de diámetro. Pueden trabajar con presiones que van desde el vació
hasta mas de 20000 lb/in² (140 Mpa) y temperaturas desde las criogénicas
hasta 1500 °F (815 °C). En algunas instalaciones se requiere un sellado
absoluto; en otras, las fugas o escurrimientos no tienen importancia. En
nuestra aplicación es necesario un sellado absoluto.

Memoria. Diseño mecánico del robot aspirador 42
La palabra flujo expresa el movimiento de un fluido, pero también
significa para nosotros la cantidad total de fluido (el aire también es un
fluido) que ha pasado por una sección de terminada de un conducto.
Caudal es el flujo por unidad de tiempo; es decir, la cantidad de fluido que
circula por una sección determinada del conducto en la unidad de tiempo.
La válvula automática de control generalmente constituye el último
elemento en un lazo de control instalado en la línea de proceso y se
comporta como un orificio cuya sección de paso varia continuamente con
la finalidad de controlar un caudal en una forma determinada.
Las válvulas de control constan básicamente de dos partes que son: la
parte motriz o actuador y el cuerpo.
• Actuador: el actuador también llamado accionador o motor, puede
ser neumático, eléctrico o hidráulico, pero los más utilizados son los
dos primeros, por ser las más sencillas y de rápida actuaciones. En
robótica se utilizan fundamentalmente los actuadotes eléctricos.
Aproximadamente el 90% de las válvulas utilizadas en la industria
son accionadas neumáticamente. Los actuadores neumáticos
constan básicamente de un diafragma, un vástago y un resorte.
• Cuerpo de la válvula: este esta provisto de un obturador o tapón,
los asientos del mismo y una serie de accesorios. La unión entre la
válvula y la tubería puede hacerse por medio de bridas soldadas o
roscadas directamente a la misma. El tapón es el encargado de
controlar la cantidad de fluido que pasa a través de la válvula y
puede accionar en la dirección de su propio eje mediante un
movimiento angular. Esta unido por medio de un vástago al
actuador.

Memoria. Diseño mecánico del robot aspirador 43
Debido a las diferentes variables, no puede haber una válvula universal;
por tanto, para satisfacer los cambiantes requisitos de la industria se han
creado innumerables diseños y variantes con el paso de los años, conforme
se han desarrollado nuevos materiales. Todos los tipos de válvulas recaen
en nueve categorías: válvulas de compuerta, válvulas de globo, válvulas
de bola, válvulas de mariposa, válvulas de apriete, válvulas de diafragma,
válvulas de macho.
A continuación, se explicarán brevemente dichos tipos de válvulas. Seria
imposible mencionar todas las características de cada tipo de válvula que
se fabrica y no se ha intentado hacerlo. Más bien se presenta una
descripción general de cada tipo en un formato general, se dan
recomendaciones para su utilización, aplicaciones, ventajas, desventajas y
otras informaciones útiles para su selección.
Nombre Aplicación Ventaja Inconveniente Fotografía
Válvula de
compuerta
Aceites,
petróleo,
gas, aire,
pasta
semilíquida
Alta capacidad,
cierre
hermético, bajo
coste, sencillo
funcionamiento,
poca resistencia
a circulación
Control deficiente
circulación,
mucha fuerza
para accionar,
cubierta o cerrada
por completo, uso
poco frecuente
Válvula de
macho
Servicio
general,
pastas
semilíquida
s, líquidos,
vapores,
gases,
corrosivos
Alta capacidad.
Bajo coste.
Cierre
hermético.
Funcionamiento
rápido
Requiere alta
torsión (par) para
accionarla.
Desgaste del
asiento.

Memoria. Diseño mecánico del robot aspirador 44
Válvula de
globo
Servicio
general,
líquidos,
vapores,
gases,
corrosivos,
pastas
semilíquida
Control preciso
de la
circulación.
Disponible con
orificios
múltiples
Larga vida
Gran caída de
presión.
Costo relativo
elevado
Válvula de
bola
Servicio
general,
altas
temperatur
as, pasta
semilíquida
Bajo costo. Alta
capacidad.
Corte
bidireccional
Circulación en
línea recta.
Pocas fugas. Se
limpia por si
sola. Poco
mantenimiento
Alta torsión para
accionarla.
Susceptible al
desgaste de sellos
o empaquetadura
Válvula de
mariposa
Servicio
general,
líquidos,
gases,
pastas
semilíquida
s, líquidos
con sólidos
en
suspensión.
Ligera de peso,
compacta, bajo
costo.Requiere
poco .No tiene
bolas o
cavidades.Alta
capacidad.Circu
lación en línea
recta.Se limpia
por si sola.
Alta torsión (par)
para accionarla.
Capacidad
limitada para
caída de presión.
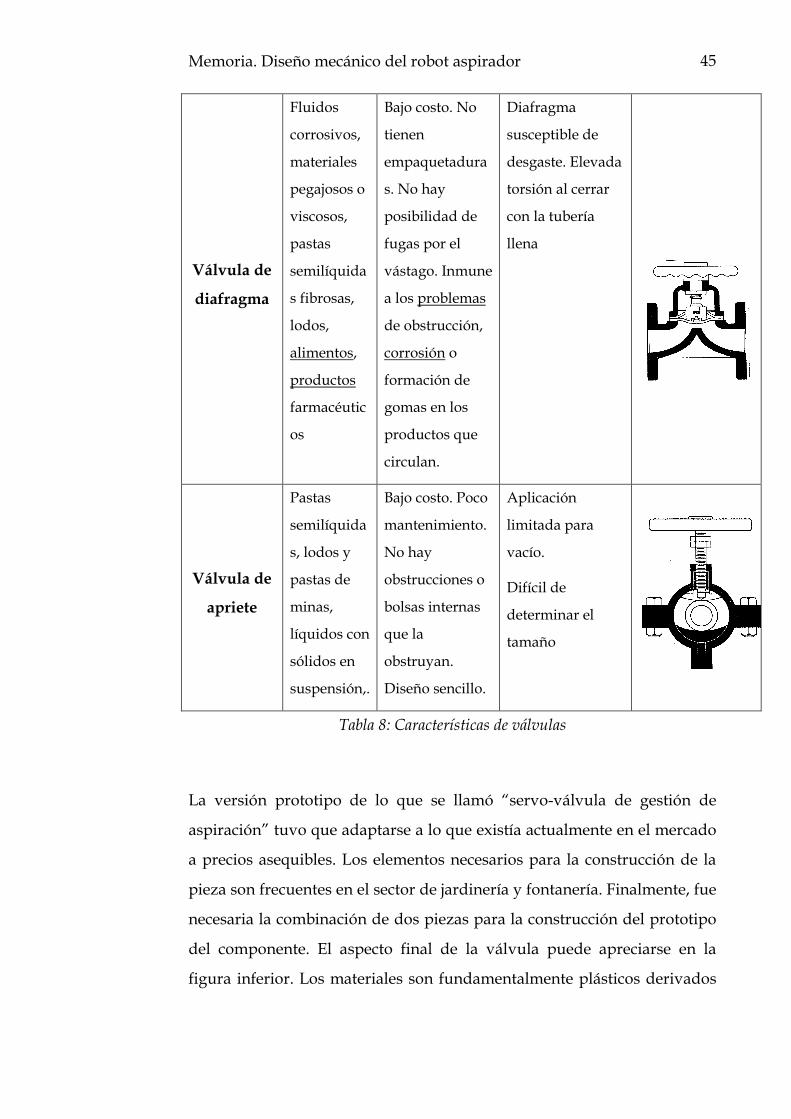
Memoria. Diseño mecánico del robot aspirador 45
Válvula de
diafragma
Fluidos
corrosivos,
materiales
pegajosos o
viscosos,
pastas
semilíquida
s fibrosas,
lodos,
alimentos,
productos
farmacéutic
os
Bajo costo. No
tienen
empaquetadura
s. No hay
posibilidad de
fugas por el
vástago. Inmune
a los problemas
de obstrucción,
corrosión o
formación de
gomas en los
productos que
circulan.
Diafragma
susceptible de
desgaste. Elevada
torsión al cerrar
con la tubería
llena
Válvula de
apriete
Pastas
semilíquida
s, lodos y
pastas de
minas,
líquidos con
sólidos en
suspensión,.
Bajo costo. Poco
mantenimiento.
No hay
obstrucciones o
bolsas internas
que la
obstruyan.
Diseño sencillo.
Aplicación
limitada para
vacío.
Difícil de
determinar el
tamaño
Tabla 8: Características de válvulas
La versión prototipo de lo que se llamó “servo-válvula de gestión de
aspiración” tuvo que adaptarse a lo que existía actualmente en el mercado
a precios asequibles. Los elementos necesarios para la construcción de la
pieza son frecuentes en el sector de jardinería y fontanería. Finalmente, fue
necesaria la combinación de dos piezas para la construcción del prototipo
del componente. El aspecto final de la válvula puede apreciarse en la
figura inferior. Los materiales son fundamentalmente plásticos derivados
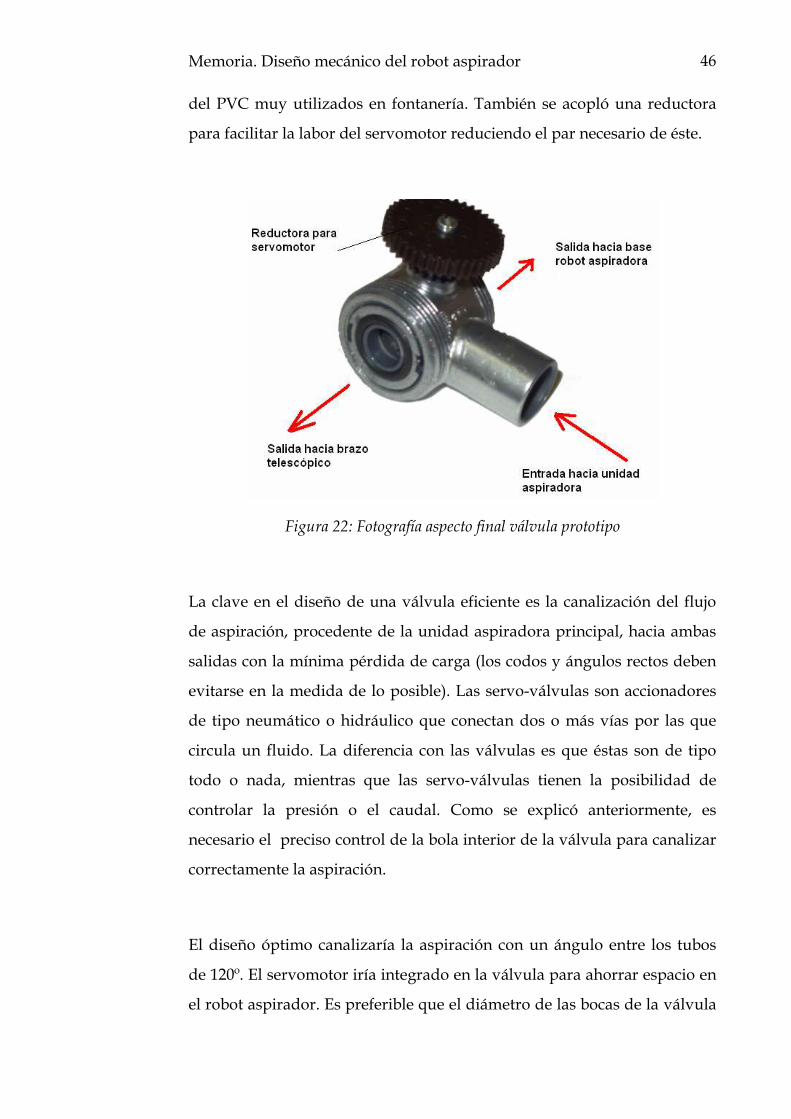
Memoria. Diseño mecánico del robot aspirador 46
del PVC muy utilizados en fontanería. También se acopló una reductora
para facilitar la labor del servomotor reduciendo el par necesario de éste.
Figura 22: Fotografía aspecto final válvula prototipo
La clave en el diseño de una válvula eficiente es la canalización del flujo
de aspiración, procedente de la unidad aspiradora principal, hacia ambas
salidas con la mínima pérdida de carga (los codos y ángulos rectos deben
evitarse en la medida de lo posible). Las servo-válvulas son accionadores
de tipo neumático o hidráulico que conectan dos o más vías por las que
circula un fluido. La diferencia con las válvulas es que éstas son de tipo
todo o nada, mientras que las servo-válvulas tienen la posibilidad de
controlar la presión o el caudal. Como se explicó anteriormente, es
necesario el preciso control de la bola interior de la válvula para canalizar
correctamente la aspiración.
El diseño óptimo canalizaría la aspiración con un ángulo entre los tubos
de 120º. El servomotor iría integrado en la válvula para ahorrar espacio en
el robot aspirador. Es preferible que el diámetro de las bocas de la válvula

Memoria. Diseño mecánico del robot aspirador 47
sea menor que el diámetro del tubo de conexión entre aspiradora-válvula,
base aspiración-válvula y brazo telescópico- válvula. De esta manera, se
reducen las pérdidas de carga debido a los escalones producidos por las
diferentes medidas de diámetros.
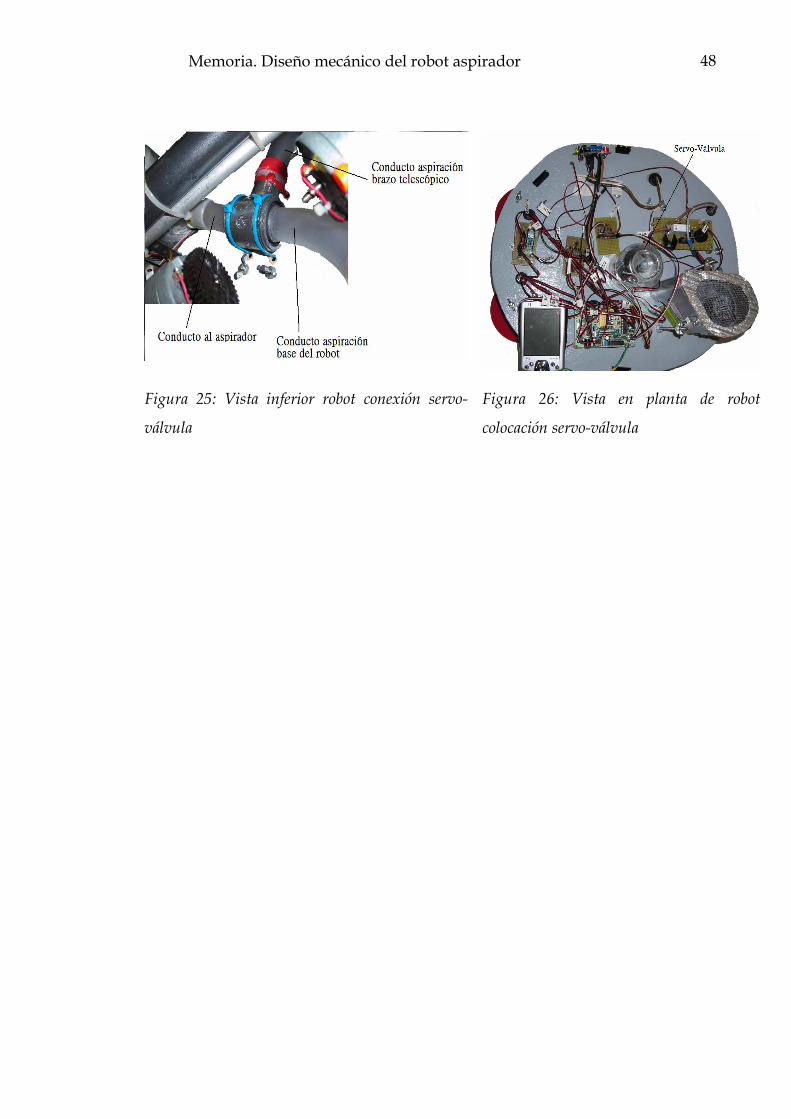
La colocación de la servo-válvula de gestión de aspiración en la aspiradora
robótica puede observarse en la fotografía inferior. Su emplazamiento
depende fuertemente de la disposición de los elementos involucrados
(aspirador, brazo telescópico y boca base) y de la minimización de codos y
retorcimientos en los tubos de conexión.
Los programas de modelado por ordenador permiten dar una imagen del
modelo óptimo de dicha servo-válvula. Las dos figuras inferiores son
producto de la utilización de dichos programas.
Para finalizar, en la figura inferior puede observarse el aspecto final de la
servo-válvula en el robot aspirador prototipo.
Figura 23: Diseño teórico válvula Figura 24: Funcionamiento teórico de la servo-
válvula
Memoria. Diseño mecánico del robot aspirador 48
Figura 25: Vista inferior robot conexión servo-
válvula
Figura 26: Vista en planta de robot
colocación servo-válvula

Memoria. Diseño mecánico del robot aspirador 49
4 Diseño carcasa exterior
La carcasa exterior, aunque elemento no imprescindible para el
funcionamiento general, determina en gran medida la capacidad de acceso
a rincones específicos y el movimiento del conjunto robot aspirador. No se
trata únicamente de incorporar una carcasa con el fin de mejorar la
estética general de producto, también cumple una importante labor
estructural para la colocación de sensores y las posibilidades de
navegación por la vivienda.
La primera impresión es muy importante a la hora de adquirir un robot
aspirador o un aspirador tradicional. Como revela un estudio realizado en
Estados Unidos en una cadena de supermercados de gran superficie, el
aspecto exterior y el tamaño son elementos clave para el cliente.
El siguiente gráfico muestra las preferencias del mercado en distintos
atributos propios del mercado de los aspiradores:
Aspectos preferidos en la elección de un nuevo aspirador
Manejable10%
Peso15%
Forma10%
Color10%Marca
13%
Precio42%
ManejablePesoFormaColorMarcaPrecio
Gráfico 1: Preferencias del mercado

Memoria. Diseño mecánico del robot aspirador 50
El óptimo en el diseño de la carcasa exterior de un robot aspirador es la
conjugación de un bajo peso y buena resistencia, baja altura, atractivo
diseño a bajo coste y una morfología adecuada para la labor que se quiere
desempeñar. A continuación se justificarán cada una de las características:
• Bajo peso y buena resistencia
La carcasa exterior no debe suponer una carga importante para el
robot aspirador. Se trata de conseguir un resultado lo más ligero
posible con la máxima resistencia.
En los últimos 10 años se ha desarrollado un amplio abanico de
materiales que mejoran las prestaciones en cuanto a peso, precio y
resistencia de los existentes anteriormente. Entre los nuevos materiales
se encuentran:
Fibra de vidrio: (del inglés Fiber Glass) es un material fibroso obtenido al
hacer fluir vidrio fundido a través de una pieza de agujeros muy finos
(espinrete) y al solidificarse tiene suficiente flexibilidad para ser usado
como fibra.
Sus principales propiedades son el buen aislamiento térmico, inerte ante
ácidos, soporta altas temperaturas. Estas propiedades y el bajo precio de
sus materias primas, le han dado popularidad en muchas aplicaciones
industriales. Las características del material permiten que la Fibra de
Vidrio sea moldeable con mínimos recursos, la habilidad artesana suele
ser suficiente para la autoconstrucción de piezas de bricolaje tales como
kayak, cascos de veleros, terminaciones de tablas de surf o esculturas, etc.
Debe ser considerado que los químicos con que se trabaja su moldeo
dañan la salud, pudiendo producir cáncer.

Memoria. Diseño mecánico del robot aspirador 51
Plásticos: Los plásticos son sustancias que contienen como ingrediente
esencial una sustancia orgánica de masa molecular llamada polímero. En
su significación más general, el término plástico, se aplica a las sustancias
de distintas estructuras y naturalezas que carecen de un punto fijo de
ebullición y poseen durante un intervalo de temperaturas propiedades de
elasticidad y flexibilidad que permiten moldearlas y adaptarlas a
diferentes formas y aplicaciones. Los plásticos proporcionan el balance
necesario de propiedades que no pueden lograrse con otros materiales por
ejemplo: color, poco peso, tacto agradable y resistencia a la degradación
ambiental (aunque algunos tipos tarden 500 años en degradarse) y
biológica. Son baratos, tienen una baja densidad, son impermeables,
aislantes eléctricos y térmicos, aunque la mayoría no resisten temperaturas
elevadas. Su quema es muy contaminante. Son resistentes a la corrosión y
a estar a la intemperie.
Grafito: o fibra de carbono es un material compuesto no metálico de tipo
polimérico. Está formado por una matriz parte del material llamada fase
dispersante que da forma a la pieza, también llamada resina que contiene
un refuerzo o fase dispersa a base de fibras, en este caso de carbono -cuya
materia prima es el polietilnitrilio-. Es un material muy caro, de
propiedades mecánicas elevadas y ligero. Al igual que la fibra de vidrio, es
un caso común de metonímia, en el cual se le da al todo el nombre de una
parte, en este caso el nombre de las fibras que lo refuerzan. Las
propiedades principales de este material compuesto son su elevada
resistencia mecánica, con un módulo de elasticidad elevado, baja
densidad, en comparación con otros elementos como por ejemplo el acero,
elevado precio de producción, resistencia a agentes externos, gran
capacidad de aislamiento, resistencia a las variaciones de temperatura,
conservando su forma, sólo si se utiliza matriz termoestable y buenas
propiedades ignífugas.

Memoria. Diseño mecánico del robot aspirador 52
El siguiente cuadro muestra una tabla con los pesos de algunos modelos
de aspiradores inteligentes presentes en el mercado.
MODELO PESO
ROOMBA 2.9 Kg
uBOT 8.12 Kg
Infinuvo CleanMate 3.2Kg
Tabla 8: Comparativa pesos aspiradores robóticos
Un indicador de la calidad del producto es el peso del robot que da el
fabricante.
Al tratarse de un producto muy orientado a la economía de costes, suele
seleccionarse el plástico como material de confección de la carcasa
exterior. El plástico ofrece grandes ventajas para la producción a grandes
escalas ya que la técnica de inyección únicamente precisa de un molde
patrón Los modelos más avanzados tecnológicamente y de precio más
elevado, sí incorporan otros materiales como la fibra de vidrio.
Para el prototipo de aspirador robotizado realizado en el proyecto se
utilizó plástico como material de confección de la carcasa exterior aunque
fue necesario adaptar en gran medida la forma del conjunto a las formas
disponibles en el mercado.
• Baja altura

Memoria. Diseño mecánico del robot aspirador 53
La altura del robot aspirador es una de las características más importantes
en el diseño de la carcasa del robot aspirador. Un buen diseño debe
mezclar un relieve mecánico minimizado para lograr ventajas en cuanto a
la navegación se refiere. Bajas alturas del conjunto se traducen en acceso a
nuevos rincones del hogar y consecuentemente mejora de la superficie
disponible para aspirar. Conseguir una baja altura, significa estar
tecnológicamente avanzado debido a que el diseño de la bolsa de
aspiración, motores de tracción y el propio motor aspirador se complica.
El siguiente cuadro muestra un resumen de la altura de diversas
aspiradoras inteligentes presentes hoy en el mercado.
MODELO ALTURA
ROOMBA 7.03 cm
uBOT 18 cm
Infinuvo CleanMate 9.4 cm
Tabla 9: Comparativa altura aspiradores robóticos
En el caso de la altura, también es un importante indicador de calidad y
tecnología. Ubot, de 18cm de altura, no cuenta, en general, con gran
calidad en sus componentes ni puede presumir de liderazgo en el
mercado.
El modelo prototipo tiene una altura de 27 cm, que es una altura muy
parecida a la del fabricante uBOT que cuenta con un producto comercial.
• Atractivo diseño a bajo coste y adecuada morfología

Memoria. Diseño mecánico del robot aspirador 54
La cubierta del robot aspirador no es aconsejable que supere el 6 % del
coste de materiales. Los clientes y la sociedad en general tienen inercia al
cambio de gusto por cambios en la moda etc… Es muy interesante realizar
un diseño que permita el cambio de carcasas fácil y rápidamente. Este
hecho mejorará el tiempo de reparación en caso de producirse daños y
añadirá un toque de personalización en el producto.
A continuación, pueden observarse algunos de los diseños presentes hoy
en el mercado.
Robot Vacuum Cleaner Robot Vacuum Cleaner II Auto Vacuu m Cleaner
Robot Cleaner Dyson DC1 Smart Multifunction
Tabla 10: Comparativa diseños carcasa exterior robots aspiradores

Memoria. Diseño mecánico del robot aspirador 55
Existe un claro dominio de los diseños circulares debido a su simplicidad
en la algoritmia de programación del robot aspirador y a los buenos
resultados que con relativamente “ poca inteligencia ” se consiguen.
Los productos más innovadores y menos asequibles, por su alto precio de
venta al público, cuentan con una morfología algo más estudiada para
mejorar la eficiencia en lo que respecta al comportamiento de aspiración
general.
Es muy común la introducción del voluminoso sensor de contacto frontal
en la mayoría de las unidades. El 99% de los modelos no cuentan con
abrazaderas para facilitar la acción humana de desplazamiento. La
simetría en el aspecto es denominador común en todos los fabricantes.
La morfología circular que la mayoría de los aspiradores adopta, queda
muy justificada por la ventaja que ofrece para hacer frente a los obstáculos
que, normalmente, aparecen en los hogares (generalmente nos
enfrentamos a los ángulos rectos presentes en esquinas o patas de silla,
con una estructura circular podemos evitar quedar atascados), por la
necesidad de situar los distintos componentes (motores, cepillos, bolsa
aspiradora) en un mismo plano (para lograr mantener una altura lo más
baja posible).
Finalmente presentamos una imagen del diseño futuro del robot aspirador
y del aspecto del prototipo realizado en el proyecto.

Memoria. Diseño mecánico del robot aspirador 56
Figura 27: Diseño carcasa teórica Figura 28: Diseño carcasa prototipo
La apertura superior practicada en la carcasa del prototipo cumple la
función de alojar la PDA de control. Se realizó una compuerta en dicho
hueco para proteger de suciedad y golpes a la PDA. También, fue
necesaria la incorporación del sensor de contacto que aparece en la figura
del prototipo de color gris plata. Un esquema general con otras vistas de
las partes principales de la carcasa exterior prototipo puede observarse en
las figuras siguientes:
Figura 29: Vista en planta carcasa teórica Figura 30: Vista de perfil carcasa teórica

Memoria. Diseño mecánico del robot aspirador 57
Como puede observarse en la vista en planta de la figura 29 el sensor de
luminosidad para el encendido automático de luces se sitúa en la parte
más alta de la carcasa. La carcasa incluye 10 diodos LED que cumplen la
función de señalizar la posición del robot en la oscuridad.
Se realizó una ventana de refrigeración con el fin de poder observar la
electrónica desde el exterior (únicamente interesante en la versión
prototipo). La función de refrigeración la cumple por establecer el contacto
entre la temperatura interior y exterior del robot aspirador prototipo.

Memoria. Diseño mecánico del robot aspirador 58
5 Elección motores tracción
La elección de los motores que dotarán de movimiento al robot aspirador
supone la determinación de los parámetros básicos de su funcionamiento.
Aspectos como la velocidad, la potencia, el peso y la forma movimiento,
quedan configurados con el diseño de este elemento.
El primer paso para la elección de los motores de tracción comienza por
determinar el tipo de movimiento que se quiere dar al robot. Existen
varias soluciones, pero la más utilizada en robots aspiradores es el sistema
de dirección diferencial o “differential drive” en inglés. Este sistema puede
concebirse como una única rueda loca pasiva y dos ruedas motrices de
tracción independiente. En robótica es muy utilizado debido a su sencillez,
aunque cuente con el inconveniente de la falta de estabilidad al
desplazarse hacia los extremos el centro de gravedad del robot en
cuestión. Se adoptó el sistema de dirección diferencial para el movimiento
del robot aspirador, serían necesarios dos motores de corriente continua
de imanes permanentes con reductora incorporada. Los motores de
corriente continua (DC) suelen controlar el giro de las ruedas de los robots
móviles y algunos incluyen un grupo reductor que proporciona un buen
par de fuerza y una gran estabilidad en la velocidad de giro. Son motores
de baja inercia en los instantes de arranque y parada. Suelen admitir un
amplio rango de alimentación en DC y tienen un peso y tamaño
reducidos.
Este tipo de motores proporcionan un par proporcional al voltaje de
entrada, lo que significa que tienen una regulación precisa. Sin embargo
no disponen de recursos para saber el ángulo girado y tiene que trabajar

Memoria. Diseño mecánico del robot aspirador 59
en lazo cerrado con sensores para controlar el ángulo girado. La siguiente
figura muestra un esquema de la cinemática del sistema de dirección
diferencial:
Figura 31: Esquema cinemática de dirección diferencial
Las ecuaciones que rigen el movimiento de este tipo de sistema son:
)21(2
ωω +⋅= RV
)21( ωω −⋅=ΩD
R
El radio de curvatura viene determinado por ΩV
Siendo:
Ω : Velocidad angular del móvil
V: Velocidad lineal del móvil

Memoria. Diseño mecánico del robot aspirador 60
21 ωω y : Velocidades angulares de las ruedas
R: Radio de curvatura
D: La longitud del eje
Determinados el número de motores, debe seleccionarse la potencia que
han de desarrollar. El primer paso fue cuantificar el peso del robot, que
sería de aproximadamente 9 Kg.
El coeficiente estático de rozamiento fue determinado experimentalmente
como se muestra en la figura inferior:
Figura 32: Esquema de fuerzas sobre robot aspirador
Como vemos en la figura superior, las fuerzas que actúan sobre el robot
aspirador son, el peso mg, la reacción del plano inclinado N, y la fuerza de
rozamiento, opuesta al movimiento.

Memoria. Diseño mecánico del robot aspirador 61
Como hay equilibrio en sentido perpendicular al plano inclinado, la fuerza
normal N es igual a la componente perpendicular al plano inclinado del
peso.
N=mg cosθ
Si el bloque se mueve con velocidad constante (aceleración cero) la
componente del peso a lo largo del plano inclinado es igual a la fuerza de
rozamiento.
mg senθ =Fr
Como el bloque se está moviendo la fuerza de rozamiento es igual al
producto del coeficiente de rozamiento cinético por la fuerza normal.
Fr=µ kN
Con estas ecuaciones, obtenemos que la medida del coeficiente de
rozamiento por deslizamiento que viene dado por la tangente del ángulo
que forma el plano inclinado con la horizontal. A este ángulo, para el cual
el movimiento del bloque es uniforme, se le suele denominar ángulo
crítico.
µ k= tanθ
Queda entonces demostrado que elevando el robot aspirador hasta el
ángulo de deslizamiento, podemos calcular el coeficiente de rozamiento
estático entre las ruedas y el plano inclinado. Para el experimento se
utilizó una plancha de madera barnizada y el ángulo a partir del cual se
producía el deslizamiento fue de 42º.
La velocidad del robot aspirador debía elegirse con cuidado de no ser
demasiado exigente teniendo en cuenta el peso del robot prototipo.

Memoria. Diseño mecánico del robot aspirador 62
Realizando un estudio de la competencia se elaboró un cuadro resumen
con las velocidades de algunos de los robots aspiradores presentes en el
mercado. El cuadro siguiente muestra dicho resumen:
Modelo de Robot Velocidad en centíemtros/segundo
uBOT 20
Vs Electronics 20
RoboCleaner 3000 20
Roomba SE 20
Tabla 11: Comparativa de velocidades robots aspiradores
Como se aprecia en el cuadro superior, todas las aspiradoras analizadas
cuentan con una velocidad de desplazamiento en llano de 20 cm/s. La
versión prototipo del robot únicamente se desplaza a 10 cm/s. Aunque
pudiese parecer que el prototipo se encuentra el último de la cola, en lo
que a velocidad se refiere, debe señalarse que la responsabilidad de la baja
velocidad recae fundamentalmente en la utilización de baterías de plomo
ácido. Estas baterías cuentan con una densidad de potencia por unidad de
peso muy inferior a las utilizadas en los robots aspiradores comerciales
que suelen ser del tipo Ni-MH o Ni-Cd.
Conocido el coeficiente de rozamiento, el peso del robot y la velocidad de
desplazamiento, se pude calcular la potencia necesaria de los motores
como:
Ns
mKggmF kapp 46.7981.999.0
2=⋅⋅=⋅⋅= µ

Memoria. Diseño mecánico del robot aspirador 63
WWs
mNvFP appteóricam 8946.71.046.79)( ≈=⋅=⋅=
WWP realmotores 3284)( =⋅=
El factor de 4x está recomendado en el capítulo de selección de motores
del “Seminario de Diseño y Construcción de Microrrobots 2001” del
profesor D.Jesús Ureña Ureña de la Universidad de Alcalá de Henares.
Mediante los cálculos, se conoce la potencia necesaria de los motores para
mover el robot en llano (unos 32W). Se buscaron varios modelos de
motores de corriente continua y se dio con uno que daba 19.2W trabajando
a una tensión nominal de 24V. Este motor fue la elección final debido a la
potencia que suministraban, considerando que el robot aspirador tuviese
que subir pendientes de hasta 15º.
Los cálculos serían los siguientes:
NsengmgmF kapp 6.99cos =⋅⋅+⋅⋅⋅= θθµ
WWs
mNvFP appteóricam 1096.91.06.99)( ≈=⋅=⋅=
WWP realmotores 84.3996.94)( =⋅=
Los motores que se seleccionaron para el movimiento en llano podrían dar
unos 19.2x2=38.4W que es prácticamente la potencia requerida en el caso
de pendientes de hasta 15º.
Una ventaja de trabajar con tensiones más altas es la disminución de la
corriente necesaria para dar la misma potencia. Así, si se hubiesen

Memoria. Diseño mecánico del robot aspirador 64
seleccionado un modelo de motores que trabajase a doce voltios de tensión
nominal serían necesarios 1.6 amperios de corriente nominal para
conseguir la misma potencia. Superar la barrera del amperio en el
funcionamiento de los motores de tracción, supone la utilización de un
driver para los motores de más capacidad y la introducción de un
disipador en el circuito actuador de dichos motores. También, hay otras
consecuencias como son la reducción de la sección del cableado y el
empleo de dos baterías de doce voltios en serie ya que no existen de
veinticuatro voltios en el mercado.
Por último, queda justificar la colocación de los motores en el robot
aspirador. Los motores se colocaron delante del brazo telescópico (el brazo
telescópico pesa unos 400 gramos) para evitar el cabeceo del conjunto.
Situando el brazo telescópico en la mitad de la planta del robot, el centro
de masa del conjunto con mucha probabilidad se posicionaría en el centro
del robot. Este hecho, asegura estabilidad frente a cabeceos ya que los
motores barredores fueron instalados en el borde exterior del robot.
Por último se muestra una figura con la colocación de los motores en el
robot aspirador prototipo.
Figura 33: Colocación de motores de tracción en robot aspirador
Memoria. Diseño mecánico del robot aspirador 65
6 Diseño e implantación barredores laterales (Sweepers)
La idea de incorporación de los barredores laterales se encuentra inspirada
en las barredoras para la limpieza viaria. Su principal finalidad es la de
concentrar las partículas de suciedad en la parte central del robot, para
facilitar la absorción de dichas partículas por la boca base del robot
aspirador. Los barredores también cumplen otra función importante en la
limpieza y es la desincrustación de la suciedad más adherida al suelo.
En el mercado, gran parte de los modelos de robots aspiradores incluyen
una serie de cepillos. Los sistemas de barrido que utiliza cada fabricante se
encuentran frecuentemente patentados. La eficacia en la limpieza de
partículas depende en un ochenta por cien del sistema de cepillos y en un
veinte por cien del sistema aspirador, hasta el límite de que algunos
fabricantes como Balai han eliminado la aspiración por completo en
alguno de sus modelos.
El sistema seleccionado para desempeñar la canalización y el barrido en el
robot aspirador prototipo, consiste en un conjunto de dos discos giratorios
paralelos al suelo accionados por dos motores independientes. Los discos
giran en sentido contrario uno del otro como se muestra en la figura
inferior.

Memoria. Diseño mecánico del robot aspirador 66
Figura 34: Esquema funcionamiento mecánico de barredores laterales
La velocidad angular de giro de los cepillos no debe ser necesariamente
elevada. Una alta velocidad de giro proyectaría la suciedad hacia el
exterior o la haría rebotar contra las cerdas del otro cepillo. Para la versión
prototipo, se utilizaron dos motores de doce voltios de corriente continua
que giran a ciento veinte revoluciones por minuto ( dos vueltas cada
segundo). Los motores deben ser de par elevado, porque no olvidemos
que al pasar por alfombras y superficies poco deslizantes el rozamiento es
mayor entre el suelo y cepillo.
A continuación se comentarán algunos de los más avanzados sistemas de
cepillos que han incorporado algunos de los fabricantes a sus robots
aspiradores. El primer modelo a comentar será la tan comentada
ROOMBA SE de iRobot. La figura siguiente muestra el sistema de cepillos
del modelo europeo que consta de tres fases:
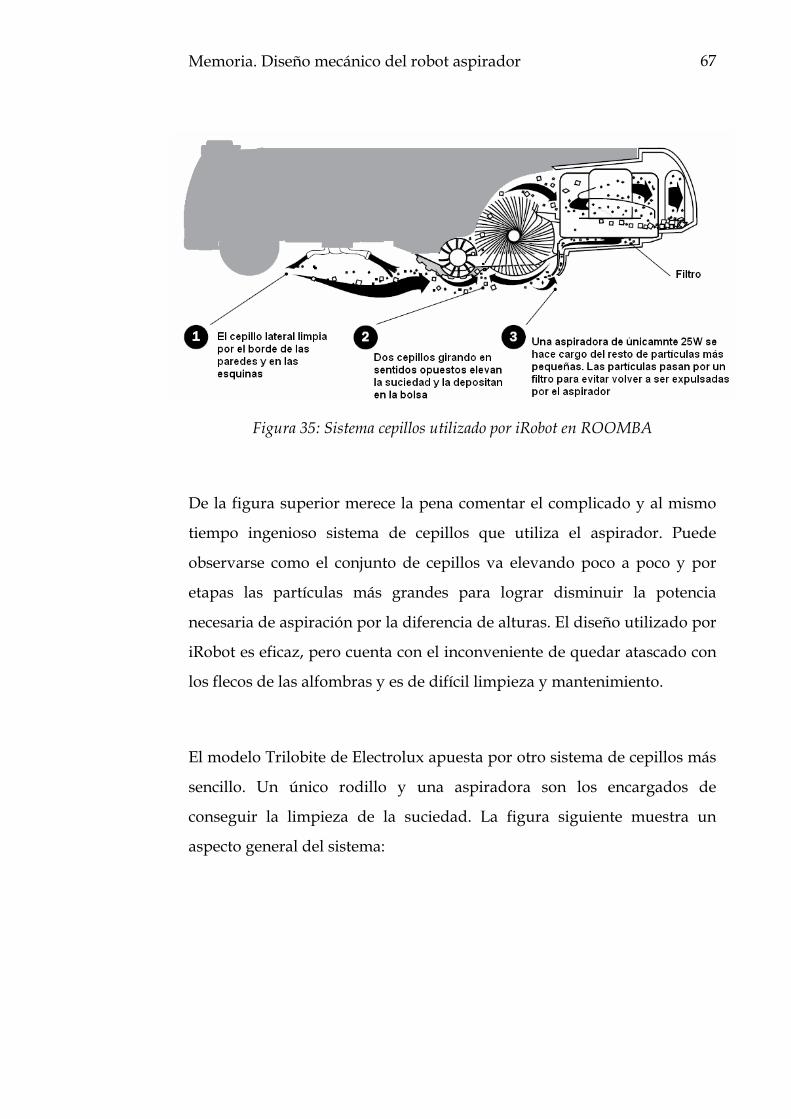
Memoria. Diseño mecánico del robot aspirador 67
Figura 35: Sistema cepillos utilizado por iRobot en ROOMBA
De la figura superior merece la pena comentar el complicado y al mismo
tiempo ingenioso sistema de cepillos que utiliza el aspirador. Puede
observarse como el conjunto de cepillos va elevando poco a poco y por
etapas las partículas más grandes para lograr disminuir la potencia
necesaria de aspiración por la diferencia de alturas. El diseño utilizado por
iRobot es eficaz, pero cuenta con el inconveniente de quedar atascado con
los flecos de las alfombras y es de difícil limpieza y mantenimiento.
El modelo Trilobite de Electrolux apuesta por otro sistema de cepillos más
sencillo. Un único rodillo y una aspiradora son los encargados de
conseguir la limpieza de la suciedad. La figura siguiente muestra un
aspecto general del sistema:
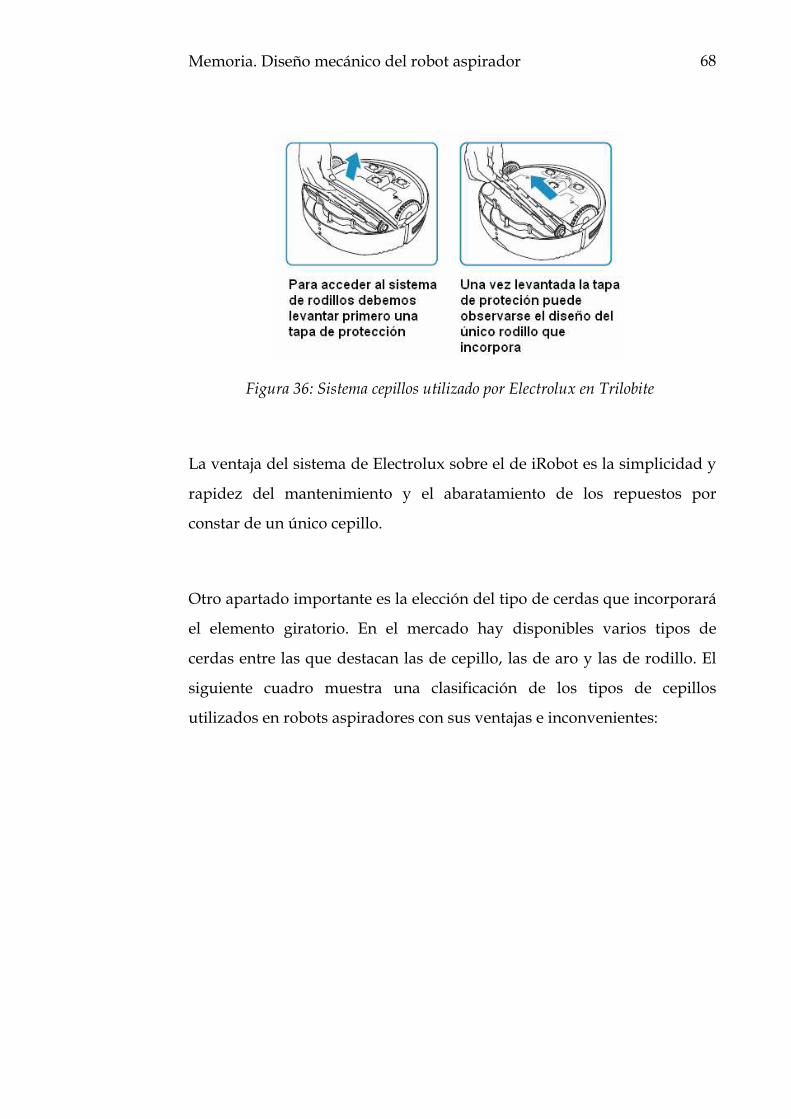
Memoria. Diseño mecánico del robot aspirador 68
Figura 36: Sistema cepillos utilizado por Electrolux en Trilobite
La ventaja del sistema de Electrolux sobre el de iRobot es la simplicidad y
rapidez del mantenimiento y el abaratamiento de los repuestos por
constar de un único cepillo.
Otro apartado importante es la elección del tipo de cerdas que incorporará
el elemento giratorio. En el mercado hay disponibles varios tipos de
cerdas entre las que destacan las de cepillo, las de aro y las de rodillo. El
siguiente cuadro muestra una clasificación de los tipos de cepillos
utilizados en robots aspiradores con sus ventajas e inconvenientes:

Memoria. Diseño mecánico del robot aspirador 69
Tipo cepillo y fotografía Ventajas Inconvenientes
Cepillo Scarab tipo cepillo
Permite no tener
que acercar el
anillo giratorio
al suelo. Bueno
con alfombras.
Fácil
mantenimiento.
Eficaz con
partículas de
tamaño medio y
grande.
Eleva la altura del
conjunto robot
aspirador. Poco
eficaz con
partículas
pequeñas. Precio
más elevado que
el cepillo aro
sencillo. Cerdas
no reemplazables,
es necesaria la
sustitución del
cepillo completo.
Cepillo Tennant tipo aro
Muy eficaz con
partículas de
pequeño
tamaño.
Permite reducir
la altura del
robot aspirador.
Mantenimiento
muy sencillo.
Peso mayor que
el cepillo tipo
Scarab anterior.
Cerdas no
reemplazables, es
necesaria la
sustitución del
cepillo completo.
Mal
comportamiento
con alfombras
por alto
rozamiento.
Mucha potencia
necesaria.

Memoria. Diseño mecánico del robot aspirador 70
Cepillo Hako tipo aro
Muy eficaz con
partículas de
gran tamaño.
Permite
reducir altura
del robot.
Mantenimiento
no necesario.
Más barato
que cepillo
tipo Tennant
Peso ligero.
Cerdas no
reemplazables.
Nula eficiencia
con partículas
pequeñas.
Buen
comportamiento
ante navegación
sobre alfombras
del robot.
Tabla 12: Comparativa características de cepillos barredores
El diseño de cepillo que se propone en el prototipo, consiste en un cepillo
mixto entre el tipo Scarab y el tipo Tennant. Las cerdas del diseño del
prototipo son del tipo cepillo pero la estructura soporte se asemeja más al
tipo Tennant. Además, se introduce la idea de cerdas repuesto sin
necesidad de adquirir una estructura de sujeción nueva. Para lograr este
comportamiento, se recurre al velcro. El sistema velcro fue inventado en el
año 1941 por George de Mestral. Se trata de un ingenioso sistema que ha
tenido múltiples usos, en aparatos domésticos, en fábricas y oficinas y en
cualquier producto que deba ser unido en dos partes. Consiste en un
sistema de apertura y cierre rápido, que cuenta en un lado con unos
ganchos más o menos deformables que se agarran a una tira de fibras
enmarañadas.
Para más información sobre cepillos visitar : http://www.isidrotorras.net,
última visita Febrero 2007.
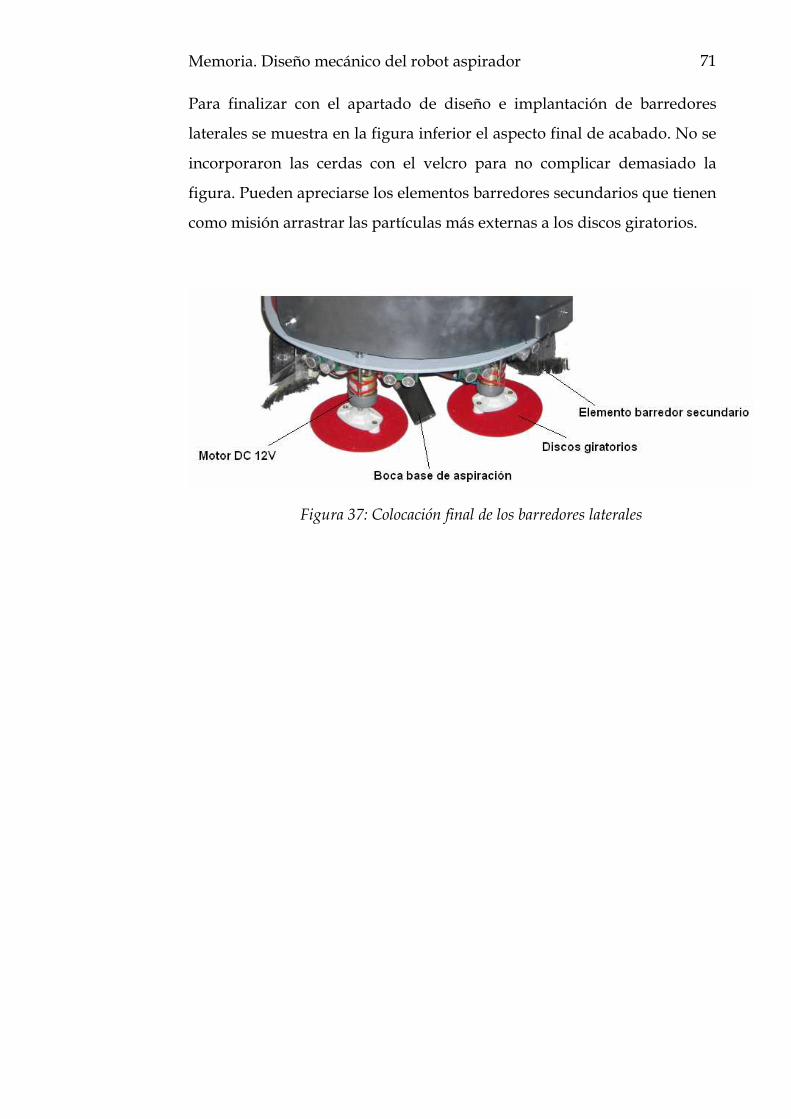
Memoria. Diseño mecánico del robot aspirador 71
Para finalizar con el apartado de diseño e implantación de barredores
laterales se muestra en la figura inferior el aspecto final de acabado. No se
incorporaron las cerdas con el velcro para no complicar demasiado la
figura. Pueden apreciarse los elementos barredores secundarios que tienen
como misión arrastrar las partículas más externas a los discos giratorios.
Figura 37: Colocación final de los barredores laterales

Memoria. Diseño electrónico del robot aspirador 72
Capítulo 3 DISEÑO ELECTRÓNICO DEL ROBOT
ASPIRADOR
El diseño electrónico comprende aquellos circuitos que incorpora el robot
aspirador para la correcta activación de los distintos elementos y funciones
del robot aspirador.
1 Diseño del actuador motor aspirador
El actuador del motor aspirador tiene como misión la traducción de la
débil señal generada por el microprocesador del robot, en el encendido o
apagado de un elemento de gran potencia como es el motor de la
aspiradora.
Estudiando el data sheet del microprocesador utilizado para el control de
todos los elementos del robot aspirador, puede encontrarse el valor de
máxima corriente y tensión de salida por las patillas del mismo. Estos
valores son de unos 25mA para la corriente total por puerto y 5V para la
tensión. La máxima potencia de salida es pues 5Vx 25mA= 0.125W. Si
Figura 38: Tarjeta actuadora motor aspirador

Memoria. Diseño electrónico del robot aspirador 73
comparamos este último dato con la potencia del aspirador, que es de
60W, comprendemos que es necesaria la incorporación de un bloque
intermedio para actuar sobre el motor aspirador. Para ello se diseño la
“tarjeta actuadota del motor aspirador” mostrada en la figura inferior:
Las entradas de la tarjeta actuadora son la señal de activado del aspirador
y alarma (acústica y luminosa) por el microprocesador, la tensión de
alimentación para el transistor que excita el circuito de mando del relé y la
tensión de alimentación de 6V para el motor aspirador. La salida de la
tarjeta actuadora la configura los cables de conexión al motor aspirador. A
continuación describiremos el proceso de diseño del actuador.
En primer lugar, para diseñar el actuador, se debe conocer el tipo de
control que queremos ejercer sobre el motor aspirador. No tiene mucho
sentido establecer un control de potencia absorbida, pues difícil sería
establecer cuando hay mucho polvo o poco polvo en la habitación. Se trata
pues de un control lógico ( no lineal ), esto es, de encendido o apagado del
aspirador según dicte la señal procedente del microprocesador.
Una vez establecido el tipo de control debe seleccionarse el elemento, en
este caso, conmutador. Se utilizará un relé para conmutar entre el estado
apagado o encendido del motor aspirador.
Un relé o relevador (del francés relais, relevo) es un dispositivo
electromecánico, que funciona como un interruptor controlado por un
circuito eléctrico en el que, por medio de un electroimán, acciona un juego
de uno o varios contactos que permiten abrir o cerrar otros circuitos
eléctricos independientes. Fue inventado por Joseph Henry en 1835. El relé
es capaz de controlar un circuito de salida de mayor potencia que el de
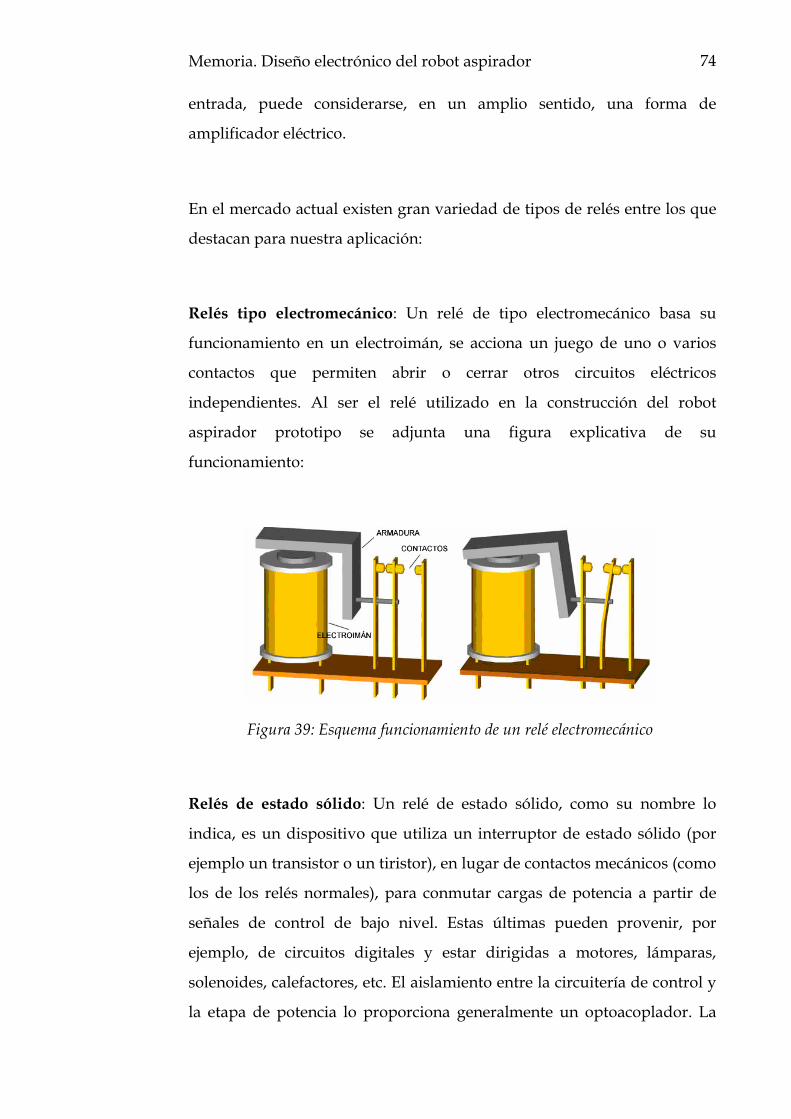
Memoria. Diseño electrónico del robot aspirador 74
entrada, puede considerarse, en un amplio sentido, una forma de
amplificador eléctrico.
En el mercado actual existen gran variedad de tipos de relés entre los que
destacan para nuestra aplicación:
Relés tipo electromecánico: Un relé de tipo electromecánico basa su
funcionamiento en un electroimán, se acciona un juego de uno o varios
contactos que permiten abrir o cerrar otros circuitos eléctricos
independientes. Al ser el relé utilizado en la construcción del robot
aspirador prototipo se adjunta una figura explicativa de su
funcionamiento:
Figura 39: Esquema funcionamiento de un relé electromecánico
Relés de estado sólido: Un relé de estado sólido, como su nombre lo
indica, es un dispositivo que utiliza un interruptor de estado sólido (por
ejemplo un transistor o un tiristor), en lugar de contactos mecánicos (como
los de los relés normales), para conmutar cargas de potencia a partir de
señales de control de bajo nivel. Estas últimas pueden provenir, por
ejemplo, de circuitos digitales y estar dirigidas a motores, lámparas,
solenoides, calefactores, etc. El aislamiento entre la circuitería de control y
la etapa de potencia lo proporciona generalmente un optoacoplador. La

Memoria. Diseño electrónico del robot aspirador 75
conmutación propiamente dicha puede ser realizada por transistores
bipolares, MOSFETs de potencia, triacs, SCRs, etc.
Un relé de estado sólido ofrece varias ventajas notables respecto a los
tradicionales relés y contactores electromecánicos: son más rápidos,
silenciosos, livianos y confiables, no se desgastan, son inmunes a los
choques y a las vibraciones, pueden conmutar altas corrientes y altos
voltajes sin producir arcos ni ionizar el aire circundante, generan muy
poca interferencia, proporcionan varios kilovoltios de aislamiento entre la
entrada y la salida, físicamente de menor tamaño, etc…
Las características del relé electromecánico utilizado en la tarjeta
actuadora del motor aspirador son: tensión de mando 12V, corriente
máxima 16A, corriente de excitación 30mA y un único circuito de contacto
normalmente abierto. El relé se encuentra sobredimensionado en corriente
máxima por el circuito de potencia. Esta es una práctica muy común al
trabajar con motores pues no olvidemos que en el arranque se producen
picos de corriente. El motor aspirador alimentado a tensión nominal de 6V
necesita de 10A de corriente, por lo tanto se sobredimensionó en un 60%.
Al trabajar con relés y motores eléctricos debemos considerar la
incorporación de diodos de protección para la descarga de las bobinas
(bobina del motor y bobina del relé). Para la descarga de energía del motor
aspirador se utilizó un diodo de potencia BYW80-200, que tiene una
capacidad de conducción de corriente en régimen continuo de 8A y de
16A en picos de corriente con frecuencias menores a los 20kHz.
Para finalizar, debe señalarse la incorporación de un microinterruptor
para el apagado de la alarma acústica (que podría resultar molesta), un
fusible de 16ª para la protección del conjunto en caso de cortocircuito y un

Memoria. Diseño electrónico del robot aspirador 76
diodo LED que señaliza la conmutación del relé, para solución de posibles
averías en el circuito. Puede consultase el apartado de planos para una
información más detallada del circuito tarjeta actuadora motor aspirador.
2 Actuador barredores laterales (Sweepers):
El diseño del actuador de los barredores laterales es muy similar al diseño
del actuador del motor de aspirador. Para este caso también se utilizó un
relé electromecánico para la conmutación lógica entre los estos de apagado
o encendido de los barredores laterales. No tiene sentido controlar la
velocidad de los barredores laterales, pero debemos apagarlos cuando nos
encontremos extendiendo el brazo telescópico.
Las características técnicas de los motores seleccionados para la
implantación de los barredores laterales determina en gran medida el
diseño del actuador. Los motores, como pudo observarse en el capitulo
primero apartado sexto “Diseño e implantación de barredores laterales”
del presente proyecto, cuentan con una tensión nominal de 12V y una
corriente nominal de 600mA. No hay que olvidar que el diseño de los
barredores cuenta con dos motores de iguales características.
Las propiedades del relé electromecánico de la tarjeta actuadora, de los
barredores laterales, son 12V de tensión de mando, 10A de corriente
máxima y dos circuitos. En este caso, la corriente máxima se encuentra
muy sobredimensionada pero el precio de los relés en este rango de
corriente es muy parejo. En la figura siguiente puede observarse el aspecto
final de la tarjeta:

Memoria. Diseño electrónico del robot aspirador 77
Figura 40: Tarjeta actuadora de barredores laterales
Las entradas de la tarjeta son la entrada de tensión de alimentación al
transistor de excitación del circuito de mando del relé, la entrada de
alimentación a los motores (se prefirió colocar un conector para que en
futuros desarrollos se pudiesen conectar motores de otras características) y
la señal lógica de control procedente de microprocesador. Las salidas son
las bornas de conexión a los motores de los barredores laterales. Se incluyó
un diodo LED para señalizar la conmutación del relé y así facilitar la labor
de detección de posibles fallos en el circuito.
Para más información sobre el diseño de la tarjeta actuadora de los
barredores laterales se recomienda observar los planos adjuntos en el
presente proyecto.

Memoria. Diseño electrónico del robot aspirador 78
3 Diseño actuadores motores de tracción y brazo telescópico:
El control de los dos motores destinados a dotar de movimiento al robot
aspirador no puede ser de tipo lógico. Es necesario el control de la
velocidad y el sentido de giro de ambos motores independientemente.
El eje de los motores de c.c. no gira ángulos discretos sino que puede
ubicarse en cualquier posición. Sin embargo, no pueden funcionar sin
realimentación puesto que no disponen de información sobre su
posicionamiento sobre el eje. El motor de c.c. debe llevar un detector de
posición e informar de la misma al sistema de control. Este motor está
compuesto por una bobina que se arrolla sobre un eje giratorio y que se
halla dentro de un campo magnético generado por un imán permanente
que los rodea. Las bobinas giratorias se llaman inducido (rotor) y el imán
permanente inductor (estator). Por la bobina giratoria circula una corriente
procedente de la tensión de alimentación aplicada a los bornes de dicha
bobina. Cada media vuelta se invierte el sentido de giro de la corriente por
la bobina, produciéndose fuerzas de atracción y repulsión que mantienen
al inducido en movimiento.
Para el control de motores de c.c. de alta potencia se usa la rectificación
por tiristores y para bajas potencias (<10Kw) se usan los transistores de
potencia.
Existen varias técnicas para resolver el problema según José M° Angulo
Usategui, Susana Romero Yesa y Ignacio Angulo Martínez. autores del libro
“Microbótica Tecnología, Aplicaciones y Montaje Práctico”, entre ellas
destacamos:

Memoria. Diseño electrónico del robot aspirador 79
• Rectificación controlada por silicio: Si la potencia a regular es
grande se utiliza el tiristor. Cuando se polariza directamente el
tiristor (positivo al ánodo y negativo al cátodo) el diodo se hace
conductor cuando la puerta recibe un impulso positivo de tensión.
Se utilizan puentes de Graetz con un tiristor en cada rama.
• Conmutación electrónica: Si la potencia a regular es pequeña se
regula el tiempo y el sentido de la corriente por las bobinas del motor
mediante transistores de potencia y circuitos integrados. Las
configuraciones básicas son el Puente en H y el Puente en T. El
Puente en H usa 4 transistores de potencia y una sola fuente de
alimentación. Funcionan los transistores dos a dos bloqueados o
conduciendo. Si una de las parejas conduce la otra está cortada.
Regulando el tiempo de conducción o bloqueo se varía la velocidad
y regulando la pareja que conduce se regula el sentido de la
intensidad. El Puente en T usa dos transistores de potencia y dos
fuentes de alimentación.
• Modulación de anchura por pulsos (PWM): Este método se basa
en aplicar la potencia al motor mediante impulsos de amplitud
variable, cuanto mayor duración tengan los pulsos en los que se
aplica la alimentación, mayor potencia recibirá el motor. El
generador de los impulsos que controla los conmutadores que
alimentan al motor produce impulsos a la misma frecuencia pero
con una anchura variable de la parte positiva para acomodarse al
carga y ala velocidad requerida.
• Modulación de la frecuencia de pulsos (PFM): En lugar de variar
la anchura de los pulsos manteniendo la frecuencia, en este método
se mantiene la anchura de los impulsos pero se varía la frecuencia
de los mismos, con lo que se obtiene unos resultados semejantes.
La anchura de pulso no varía, pero si la frecuencia con la que se
produce.

Memoria. Diseño electrónico del robot aspirador 80
Para el control de los motores se utilizó el integrado L293B. Se trata de un
driver de 4 canales capaz de proporcionar una corriente de salida de hasta
1A por canal. Cada canal es controlado por señales de entrada compatibles
TTL y cada pareja de canales dispone de una señal de habilitación que
desconecta las salidas de los mismos. Dispone de una patilla para la
alimentación de las cargas que se están controlando, de forma que dicha
alimentación es independiente de la lógica de control.
Al principio, se pensó en la utilización de una de otras dos variantes del
driver anterior, el L293D y el L298. El L293D es muy similar al driver
finalmente implantado para el control de motores de tracción del robot
aspirador prototipo. La diferencia fundamental es que el L293D lleva
incorporados los diodos correspondientes de protección para la descarga
de corriente de las bobinas. El inconveniente es que únicamente ofrece
600mA por canal, que es inferior a los 850mA que necesitan cada uno de
los motores utilizados.
El integrado L298, más sofisticado que los anteriores, incluye una
capacidad de salida de 4A de corriente y sensado de la tensión de salida
para el establecimiento de controles y protecciones de sobretensión. Fue
descartado por su precio en comparación con el L293B y por no requerirse
tanta corriente de salida en nuestra aplicación.
El esquema de funcionamiento del driver L293B utilizado es el siguiente:

Memoria. Diseño electrónico del robot aspirador 81
Figura 41: Esquema del integrado L293B
Cada canal o driver es controlado por medio de una señal de control
compatible TTL (no superior a 7V) y los canales se habilitan de dos en dos
por medio de las señales de control EN1 (canal 1 y 2) y EN2 (canal 3 y 4),
en la siguiente tabla vemos el funcionamiento de las entradas y como
responden las salidas. En la siguiente tabla se aprecia el funcionamiento de
las entradas y como responden las salidas.
ENn INn OUTn
H H H
H L L
L H Z
L L Z
Tabla 13: Funcionamiento entradas y salidas L293B

Memoria. Diseño electrónico del robot aspirador 82
Así pues, se observa que poniendo a nivel alto la entrada de habilitación
“EN” del driver, la salida de este “OUT” pasa de alta impedancia al
mismo nivel que se encuentre la entrada del driver “IN” pero amplificado
en tensión y en corriente, siendo esta de 1ª máximo. La tensión de
alimentación del circuito integrado no es la misma que se aplica a las carga
conectada a las salidas de los drivers, y para estas salidas se a de alimentar
el driver por su patita número 8 (Vs), la tensión máxima aplicable a estas
patitas es de 36V .
Como este integrado no dispone de disipador, el fabricante recomienda
hacer pasar una pista ancha de circuito impreso por las patitas de masa
que junten todas estas y al mismo tiempo haga de pequeño disipador
térmico.
La figura inferior muestra la integración de los motores en el driver. Para
tener el control de dos direcciones o bidireccional se usan dos drivers del
L293B conectando sus salidas a los polos del motor, entonces podremos
cambiar la polaridad de alimentación del motor con tan solo cambiar de
estado las entradas de los drivers.
Por ejemplo, para que el motor gire hacia la derecha se energizará la
entrada “A” a nivel alto “1” y “B” a nivel bajo “0” y para hacer girar el
motor a la izquierda se tendrán que invertir las señales de entrada de tal
manera, la entrada “A” a nivel bajo “0” y “B” a nivel alto “1”. Los diodos
son como en el caso anterior para proteger el integrado de corrientes
inversas.
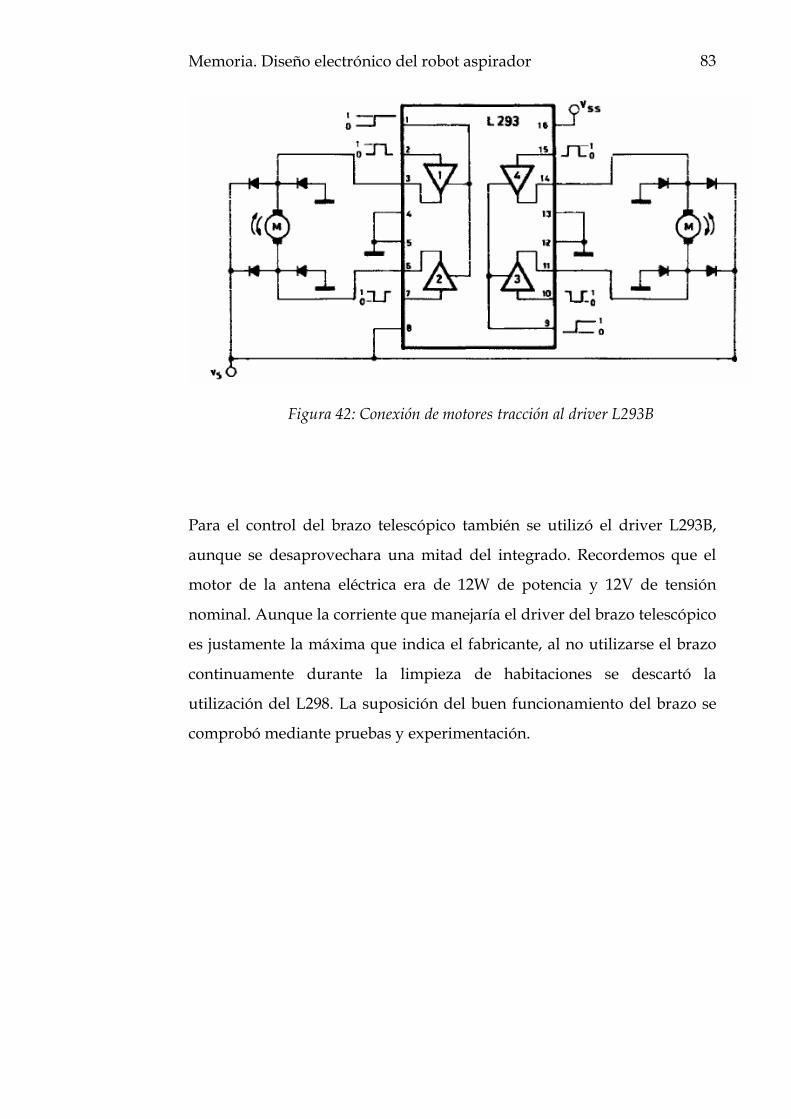
Memoria. Diseño electrónico del robot aspirador 83
Figura 42: Conexión de motores tracción al driver L293B
Para el control del brazo telescópico también se utilizó el driver L293B,
aunque se desaprovechara una mitad del integrado. Recordemos que el
motor de la antena eléctrica era de 12W de potencia y 12V de tensión
nominal. Aunque la corriente que manejaría el driver del brazo telescópico
es justamente la máxima que indica el fabricante, al no utilizarse el brazo
continuamente durante la limpieza de habitaciones se descartó la
utilización del L298. La suposición del buen funcionamiento del brazo se
comprobó mediante pruebas y experimentación.
Memoria. Diseño electrónico del robot aspirador 84
4 Diseño sensor luminosidad
En este apartado se explicará el diseño del sensor de luminosidad
incorporado en el robot aspirador. El objetivo es establecer un sistema de
medida y control de la intensidad luminosa del ambiente para señalizar
selectivamente la presencia del robot en la habitación. Para ello se utilizará
una fotorresistencia como sensor de intensidad luminosa y un conjunto de
diez diodos LED para la señalización. El sistema mantiene constante e
igual a una consigna externa la intensidad luminosa medida por el sensor,
mediante un control de la alimentación a los diodos LED.
Las aspiradoras robóticas presentes hasta hoy en el mercado no incluyen
ningún tipo de señalización para la localización del aspirador durante su
actividad nocturna. La fotografía siguiente muestra el aspecto final de la
placa de señalización luminosa:
Figura 43: Placa de señalización luminosa del robot aspirador

Memoria. Diseño electrónico del robot aspirador 85
El proceso de acondicionamiento del sensor de luminosidad es el
siguiente:
Se necesita que la consigna de intensidad luminosa sea lineal en el rango
0v (40lux) a 10v (400lux). Se deberá diseñar un acondicionador cuya salida
sea aproximadamente lineal con la intensidad luminosa medida por el
sensor. El control diseñado será de tipo proporcional. (aunque exista algún
error en el valor de luminosidad alcanzado será imperceptible para la
vista humana).
Para su construcción se emplearon los siguientes elementos: operacionales
LF411,un transistor bipolar de potencia BD137, un conjunto de diez diodos
LED y una fotorresistencia VT43N2.
El sistema a diseñar se encontrará en realimentación negativa en lazo
cerrado. La realimentación será la encargada de corregir la salida para
intentar hacerla igual que la consigna deseada. Consta de 3 bloques:
-Regulador: Será el encargado de aplicar la tensión de mando necesaria
para que el actuador corrija a la bombilla.
-Sensor y acondicionamiento: Medirá la intensidad luminosa de la
bombilla dándonos una señal en tensión que restaremos a la consigna
deseada.
-Actuador y planta. La labor del actuador la realizará el transistor de
potencia que alimentará a la bombilla que se situará en su emisor.

Memoria. Diseño electrónico del robot aspirador 86
Figura 44: Diagrama de bloques del sistema de control de iluminación
Las etapas para la realización del diseño fueron las siguientes:
- Linealización del sensor.
- Acondicionamiento del sensor a la característica entrada/salida deseada.
- Diseño de Regulador y Actuador
LINEALIZACIÓN DEL SENSOR:
El sensor fotoresistivo utilizado es de características claramente no
lineales, es necesario realizar un circuito de acondicionamiento para
conseguir la característica de salida deseada.
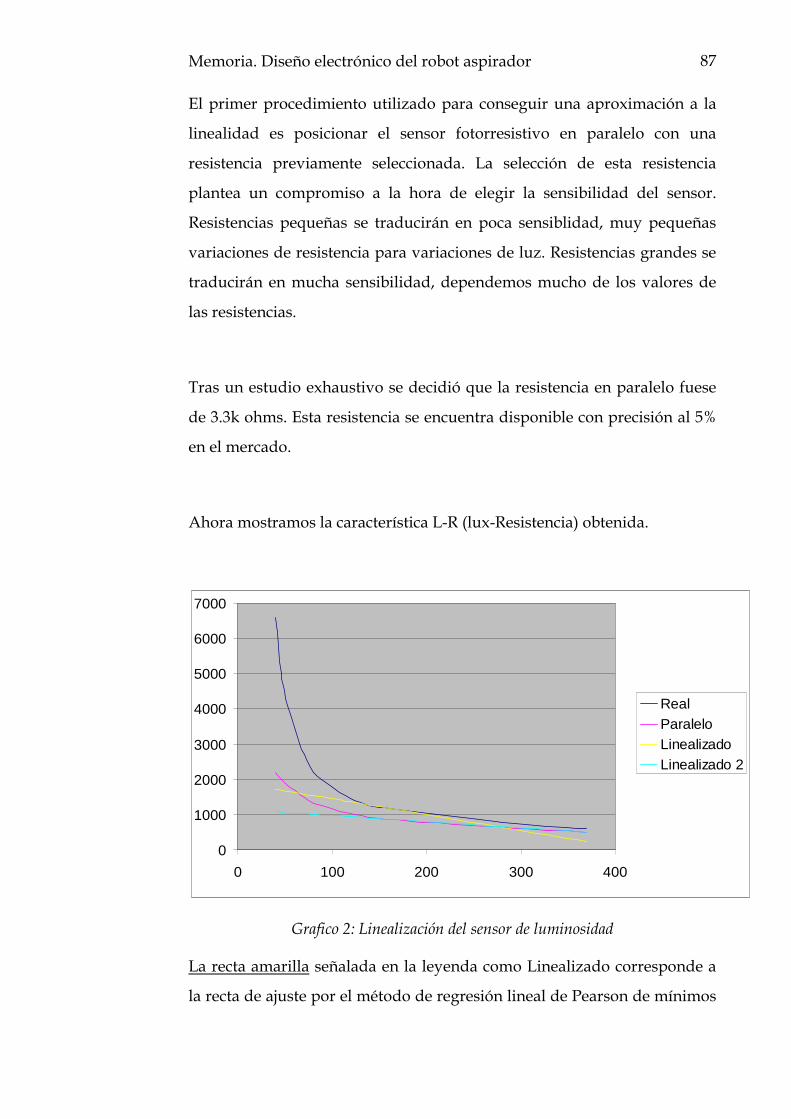
Memoria. Diseño electrónico del robot aspirador 87
El primer procedimiento utilizado para conseguir una aproximación a la
linealidad es posicionar el sensor fotorresistivo en paralelo con una
resistencia previamente seleccionada. La selección de esta resistencia
plantea un compromiso a la hora de elegir la sensibilidad del sensor.
Resistencias pequeñas se traducirán en poca sensiblidad, muy pequeñas
variaciones de resistencia para variaciones de luz. Resistencias grandes se
traducirán en mucha sensibilidad, dependemos mucho de los valores de
las resistencias.
Tras un estudio exhaustivo se decidió que la resistencia en paralelo fuese
de 3.3k ohms. Esta resistencia se encuentra disponible con precisión al 5%
en el mercado.
Ahora mostramos la característica L-R (lux-Resistencia) obtenida.
0
1000
2000
3000
4000
5000
6000
7000
0 100 200 300 400
RealParaleloLinealizadoLinealizado 2
Grafico 2: Linealización del sensor de luminosidad
La recta amarilla señalada en la leyenda como Linealizado corresponde a
la recta de ajuste por el método de regresión lineal de Pearson de mínimos

Memoria. Diseño electrónico del robot aspirador 88
cuadrados. Esta recta correspondería a la de mínimo error posible
considerando el rango de trabajo utilizado. Se decidió no utilizar esta
característica de L-R ya que se comprobó que en condiciones normales de
trabajo en el laboratorio nos situaríamos entorno a unos 100 lux que
sumados a la intensidad luminosa de la bombilla podría llevarnos
fácilmente a valores de unos 300-450 lux. La recta correspondiente sería R
= -4.48L + 1892
La recta morada señalada como Paralelo corresponde a la característica
obtenida una vez introducida la resistencia en paralelo con el sensor
fotorresistivo.
La recta azul señalada como Linealizado2 corresponde a la característica
obtenida escogiendo únicamente 2 puntos de la recta marcada como
Paralelo. Estos puntos seleccionados fueron P1(150,880) y P2(370,508)
obteniendo una recta de ecuación
R= -1.7L + 1137.
Esta es la característica que se consideró conveniente utilizar para el
circuito de acondicionamiento por las razones anteriormente expuestas. El
haber seleccionado esta característica se traduce en conseguir una gran
precisión a partir de consignas de 2V- 10V. Los errores cometidos para
consignas 0V a 2V no son muy significativos ya que para 40-80 lux la
bombilla esta prácticamente apagada.
Una vez seleccionadas las resistencias se procede a diseñar el resto del
acondicionamiento.
Memoria. Diseño electrónico del robot aspirador 89
ACONDICIONAMIENTO DEL SENSOR A LA CARACTERÍSTICA
ENTRADA/SALIDA DESEADA.
Se decidió utilizar una tensión de alimentación de 12V dual ya que los
valores típicos del rango de salida del LM411 rondan los 13.5V y
queremos controlar un conjunto de diodos LED.
Para obtener la característica deseada, será necesario invertir la
característica de la resistencia y multiplicarla por una corriente de
referencia, sumar un cierto valor de offset para ajustar el punto (40,0) y
ajustar la ganancia de la etapa sumadora inversora para conseguir el
punto (400,10).
Los cálculos correspondientes son los siguientes:
xIILV oo ++⋅⋅−= 11377.11 ;
xII oo ++⋅⋅−= 1137407.10 ;Para el punto P(40,0) sabiendo que la corriente
es 1mA
x = -1.069V;
);069.111377.1)((0 −+⋅⋅−−= ooa IILGV Para el punto P(400,10)
Ga = 16.33 V/V será la ganancia del sumador
Se ajustará la referencia de x = -1.069V para utilizar una alimentación de
12V
Memoria. Diseño electrónico del robot aspirador 90
-1.069V / R = -12 / x ; La nueva referencia será de 14R.
El circuito de acondicionamiento resultante será:
DISEÑO DE REGULADOR Y ACTUADOR
Los diez diodos utilizados para la iluminación de la carcasa exterior
suponen una necesidad de potencia mayor que lo que se ofrece en los BJT
de señal tradicionales. Los amplificadores operacionales no pueden dar
más de unos pocos mA de corriente luego es necesaria la utilización del
transistor de potencia.
En la base del transistor de potencia se incluyó una resistencia limitante
para evitar dañar los LED por usar tensiones algo más elevadas que 12V.
Resultó ser de unos 50 ohms.

Memoria. Diseño electrónico del robot aspirador 91
5 Diseño placa de alimentación
La placa de alimentación cumple la misión de facilitar la recarga de
baterías, establecer los puntos de conexión de alimentación de cada
elemento y el apagado general del robot aspirador.
Su diseño es sencillo y resulta muy práctico a la hora de trabajar con una
versión prototipo. La figura inferior muestra el aspecto general de la placa
de alimentación:
El diodo LED que aparece en la figura de color transparente, en realidad
emite una luz azulada al ser activado. Este diodo es utilizado para la
señalización de activado de alimentación de los 24V de tensión. El
interruptor que aparece a su derecha cumple la función de activar o
desactivar la alimentación de 24V. Recordemos, que los motores de
Figura 45: Placa alimentación robot aspirador

Memoria. Diseño electrónico del robot aspirador 92
tracción principal funcionan con una tensión de 24V. De esta manera, se
puede aislar el movimiento del robot del resto de actuadores del robot.
El diodo LED que aparece en la figura de color amarillo, se utiliza para
señalizar la conexión de los 12V de alimentación al robot aspirador. El
interruptor situado a su derecha sirve para la desconexión de alimentación
de los 12V de alimentación. Permite aislar aquellos elementos que
funcionan con la tensión de 12V (Sweepers, motor de antena etc..).
Las bananas de conexión sirven, fundamentalmente, para la recarga
sencilla de las baterías de 12V. Conectándose dos bananas procedentes de
un cargador de baterías y cerciorándose de que los interruptores de la
placa se encuentren en posición abierta, puede realizarse la carga a 24V. La
conexión es de dos baterías de 12V en serie. Recordemos que la corriente
no debe superar los 200mA.
Se incluyó un fusible de protección de 3A para proteger al circuito de
sobretensiones o accidentes que provocara el usuario.
Para la alimentación de los distintos elementos del robot aspirador se han
utilizado “pinchos de conexión”. Aunque no aseguran una buena
conexión en algunas ocasiones, para la versión de prototipo resultaron ser
muy prácticos. La desconexión de circuitos para su prueba es muy
frecuente en la fase de diseño del robot aspirador.

Memoria. Diseño electrónico del robot aspirador 93
6 Diseño placa aviso batería baja
La función de la placa de aviso de batería baja es informar al usuario y al
microcontrolador acerca de la energía de la batería de 6V del aspirador.
Dos diodos LED señalan si el nivel de batería es correcto o no. (Verde
significa correcto y rojo incorrecto). También se informa al
microcontrolador con una señal lógica del estado de la batería.
El circuito es muy sencillo. Se trata de un comparador inversor con
histéresis. Se incluyó un interruptor para desconectar el LED de batería
correcta para ahorrar energía. Las entradas a la tarjeta son la alimentación
de 12V del circuito y el sensado de la tensión de batería de 6V. La única
salida es el aviso mediante una señal entre 0 y 5V para el
microcontrolador.
El margen de histéresis se encuentra entre, aproximadamente, 5.8V y 6.2V.
No debemos olvidar que la tensión de flotación de la batería debe estar
entorno a los 6.5V para considerarla cargada y que durante el uso no
debiera trabajar con menos de 6.2V. La figura inferior muestra la placa.
Figura 46: Placa señalización batería aspirador baja
Memoria. Resultados/Experimentos 94
Capítulo 4 RESULTADOS/EXPERIMENTOS
En este apartado se comentarán los experimentos con el robot aspirador
final realizado entre los dos proyectistas involucrados.
El conjunto de experimentos se divide en dos tipos de pruebas:
• Pruebas de aspiración: Incluye las pruebas de aspiración por la base del robot aspirador y el brazo telescópico con servo-válvula y sin servo-válvula. Se somete a la boca base y a la boca del brazo telescópico a diferentes cargas para comprobar la potencia de aspiración efectiva. El protocolo de pruebas se comentará más adelante en este apartado.
• Pruebas de navegación: Incluye las pruebas de navegación general del robot aspirador con todos sus elementos por una habitación del hogar seleccionada. Las condiciones de la prueba se describirán más adelante.
1. PROTOCOLO DE PRUEBAS DE ASPIRACIÓN
A continuación se describen las características de entorno más relevantes
para la realización de la prueba de aspiración.
Las pruebas de aspiración se dividen en dos grupos:
1.1 Pruebas sin servo-válvula
En las pruebas sin servo-válvula se eliminará del circuito de aspiración del
robot la servo-válvula de gestión de aspiración. La conexión de la boca

Memoria. Resultados/Experimentos 95
base de aspiración o de la boca del brazo telescópico se hará directamente
con la bolsa de aspiración. Este experimento tiene como objetivo principal
evaluar cualitativamente las pérdidas debidas a fugas en el brazo
telescópico y la potencia efectiva de aspiración en cada una de las bocas de
aspiración (base y brazo telescópico).
Las pruebas se realizaron con las siguientes condiciones:
1. La batería de 6V del motor aspirador se encontrará cargada completamente con una tensión de flotación de aproximadamente 7,2V.
2. La temperatura ambiente rondará los 25ºC. Nunca superior a los 42ºC.
3. La prueba nunca durará más de 15 minutos de aspiración continuada. Entre la preparación de cada carga de partículas y las conexiones del circuito de aspiración, la aspiradora permanecerá apagada. En caso de tener que repetir el experimento se dejará recargando la batería de 6V un mínimo de 3 horas, hasta alcanzar la tensión de flotación mencionada en el apartado 1.
4. Las cargas seleccionadas se irán acercando lentamente hacia la toma de aspiración que se quiera analizar, pero nunca se empujarán dentro de la toma en cuestión.
5. Las partículas seleccionadas como cargas de prueba de aspiración serán: un conjunto de finos papeles de celulosa cortados en cuadrados, bolitas de papel de aluminio compactadas, garbanzos caseros crudos, judías pintas caseras crudas, tornillos y tuercas. Para el caso del brazo telescópico, por motivos de morfología de la boca de aspiración, la carga será de una mezcla de sal fina y café molido.
6. Terminada la aspiración de todos los elementos que configuren una carga, (ejemplo: Aspiración todas las bolitas de papel) se apagará la aspiradora y se retiraran los elementos aspirados de la bolsa de aspiración.
7. Cada prueba únicamente se considerará satisfactoria si se han aspirado y encontrado en la bolsa una cantidad igual o superior al 90% de las partículas que configuraban la carga. Ejemplo: Si de 10 elementos aspiramos 10 y encontramos 9 en la bolsa la prueba se dará por satisfactoria.
8. El robot aspirador se encontrará en posición completamente horizontal y la bolsa de aspiración llevará la tapa inferior de la bolsa cerrada.
Memoria. Resultados/Experimentos 96
9. Antes de comenzar el experimento se deberá comprobar que no existan fugas, roturas u obstrucciones en el circuito de aspiración.
10. Para la realización de la prueba de aspiración de la boca del brazo telescópico, éste debe encontrarse extendido hasta su longitud máxima. Podrán realizarse hasta un máximo de dos pasadas del brazo por encima de la carga para lograr la aspiración. La velocidad de extensión y contracción del brazo será la misma que la utilizada en la navegación general del robot.
11. Deben evitarse, en la medida de lo posible, la aparición de codos en el circuito de aspiración.
12. Podrán activarse los barredores laterales del robot aspirador para facilitar la canalización de la carga hacia la boca base de aspiración.
13. Debe comprobarse que la toma de salida de aire del motor aspirador se encuentra despejada de obstáculos o suciedad para la realización de ambas pruebas (aspiración base y aspiración brazo telescópico).
14. Para la prueba de aspiración base de éste conjunto de pruebas, conéctese directamente la bolsa de aspiración con la boca base de aspiración mediante el tubo flexible incluido.
15. Para la prueba de aspiración del brazo telescópico de éste conjunto de pruebas, conéctese directamente la bolsa de aspiración con el primer segmento (mayor en diámetro) del brazo telescópico de aspiración mediante el tubo flexible incluido
1.2 Pruebas con servo-válvula
En las pruebas con servo-válvula se incorpora el elemento “servo-válvula
de gestión de aspiración” en el conjunto robot aspirador. El cometido de
este conjunto de pruebas es la medida cualitativa de eficiencia de la servo-
válvula en la aspiración de base y en la aspiración por el brazo telescópico.
A continuación se describen los requisitos que debe reunir la prueba.
1. Se aplicará la normativa del apartado 1.1 Pruebas sin servo-válvula exceptuando las normas 14 y 15.
2. La servo-válvula debe colocarse en la posición diseñada en el robot aspirador para tal efecto. Su sujeción será firme a la estructura del robot.
3. Se procederá al calibrado del conjunto servomotor y engranaje reductor para lograr el cambio de la dirección de caudal base o brazo telescópico.

Memoria. Resultados/Experimentos 97
4. Antes de la conexión de los tubos flexibles de aspiración se comprobará el correcto funcionamiento de la servo-válvula, programando los giros con la unidad de control.
5. Se conectarán los tubos flexibles como se explicó en el apartado de “Diseño e Implantación de la Servo-válvula de Gestión de Aspiración” del presente proyecto.
6. Antes de la aspiración de las partículas, se orientará adecuadamente la servo-válvula hacia la base o el brazo telescópico según corresponda.
2. PROTOCOLO DE PRUEBAS DE NAVEGACIÓN
A continuación se describen las características de entorno más relevantes
para la realización de la prueba de navegación. El objetivo de la prueba es
demostrar la eficacia de los algoritmos de navegación del robot aspirador
en distintos entornos. Se distinguen dos escenarios distintos para la
navegación:
• Entorno estructurado: La finalidad de someter al robot aspirador a un entorno estructurado es la búsqueda de medidas de superficie efectiva de aspiración. En la actualidad todos los fabricantes de robots aspiradores incluyen mediciones que relacionan la superficie visitada por unidad de tiempo. La medida duele facilitarse en tanto por cien. Ejemplo: 90% de eficacia en 6 metros cuadrados en un tiempo de 30 minutos. Supone visitar 0.9*6=5.4 metros cuadrados de superficie en 30 minutos. El entorno en esta situación suele ser cuadrado, de dimensiones definidas y libre de obstáculos.
• Entorno desestructurado: la finalidad de someter al robot aspirador a un entorno desestructurado es la valoración global y real del comportamiento de la unidad. Los fabricantes de aspiradores inteligentes, generalmente, abordan este apartado presentando videos de demostración de las habilidades de sus productos. Para este caso el entorno no debe estar definido en forma ni tamaño y debe presentar obstáculos.
Memoria. Resultados/Experimentos 98
2.1 DEFINICIÓN DEL PROTOCOLO DE PRUEBAS PARA ENTORNO ESTRUCTURADO
1 Las pruebas de navegación del robot aspirador en entorno desestructurado se realizarán en una superficie plana, cuadrada, embaldosada de área 25 metros cuadrados.
2 En cada baldosa se colocará una pegatina que se irá retirando cuando el robot aspirador pase por encima de ella.
3 La duración total de la prueba será de 8 minutos y 30 segundos. 4 El robot aspirador se situará el cualquier lugar de la superficie
de prueba. 5 El arranque del robot aspirador debe sincronizarse con un
cronómetro para la cuenta del tiempo de prueba. 6 Trascurrido el tiempo de prueba no se quitarán más pegatinas
de nuevas baldosas que pudiera visitar el robot. Se procederá al apagado de éste.
7 Para el cálculo del rendimiento de la prueba se realizará la siguiente operación: (Baldosas visitadas/baldosas totales)*100 en 8 minutos y 30 segundos.
8 La prueba se realizará con ambas las baterías de 12V cargadas completamente, alcanzando una tensión de flotación de 13.7V
9 Entre dos pruebas deben reponerse las pegatinas arrancadas en la prueba anterior.
10 Durante la prueba no se debe modificar la trayectoria del robot aspirador. La persona que arranque las pegatinas irá siempre detrás del robot.
11 En ningún caso podrá tocarse el robot aspirador una vez comenzada la prueba.
12 La utilización de la unidad aspiradora es opcional y no necesaria.
13 La aspiradora incorporará todos sus elementos para la realización de la prueba. (Bocas de aspiración, baterías, carcasa exterior etc..)
2.2 DEFINICIÓN DEL PROTOCOLO DE PRUEBAS PARA ENTORNO DESESTRUCTURADO
1. Son aplicables a estas pruebas los puntos 3, 4, 5, 8, 11, 12 y 13. 2. Podrán utilizarse lugares con bajadas de escaleras y que cuenten
con obstáculos tipo sillas, mesas, camas sillones etc…
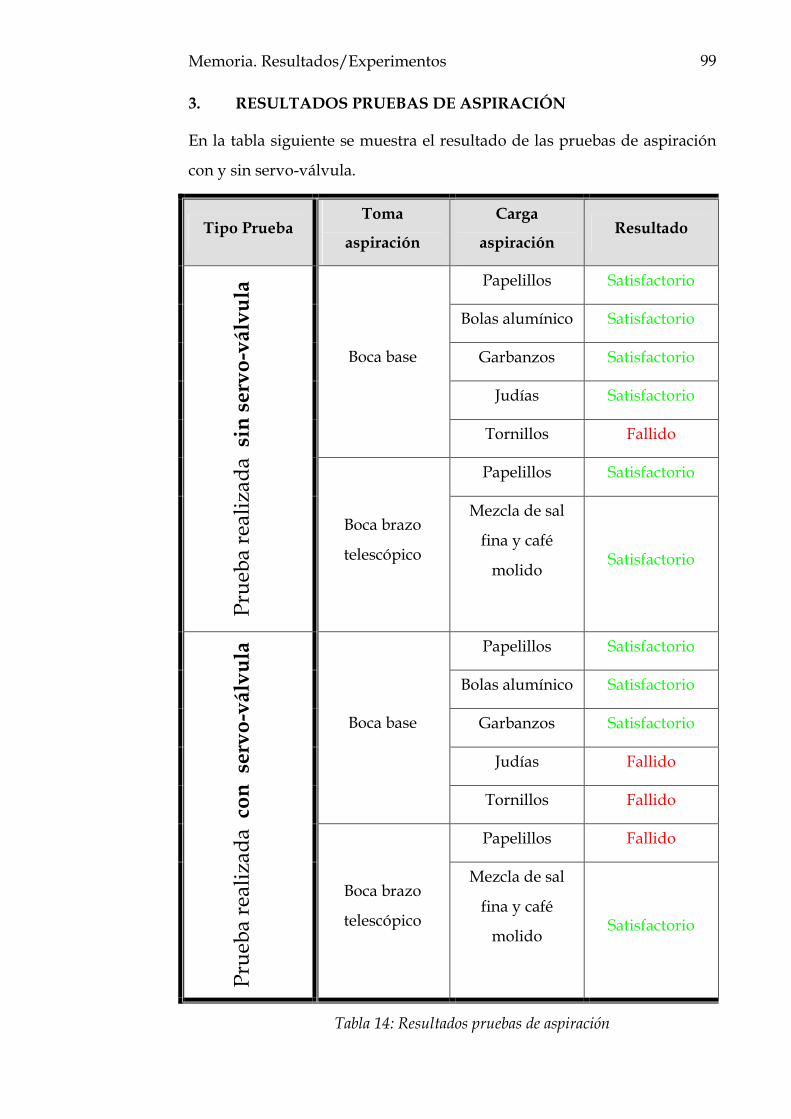
Memoria. Resultados/Experimentos 99
3. RESULTADOS PRUEBAS DE ASPIRACIÓN
En la tabla siguiente se muestra el resultado de las pruebas de aspiración
con y sin servo-válvula.
Tipo Prueba Toma
aspiración
Carga
aspiración Resultado
Papelillos Satisfactorio
Bolas alumínico Satisfactorio
Garbanzos Satisfactorio
Judías Satisfactorio
Boca base
Tornillos Fallido
Papelillos Satisfactorio
Pru
eba
real
izad
a sin servo-válvula
Boca brazo
telescópico
Mezcla de sal
fina y café
molido
Satisfactorio
Papelillos Satisfactorio
Bolas alumínico Satisfactorio
Garbanzos Satisfactorio
Judías Fallido
Boca base
Tornillos Fallido
Papelillos Fallido
Pru
eba
real
izad
a con servo-válvula
Boca brazo
telescópico
Mezcla de sal
fina y café
molido
Satisfactorio
Tabla 14: Resultados pruebas de aspiración
Memoria. Resultados/Experimentos 100
Como puede comprobarse en la tabla anterior, la introducción de la
válvula se traduce en un empeoramiento de la capacidad de aspiración del
robot. Las cargas con cierto diámetro tienden a salir rebotadas en el caso
de la aspiración por la boca base y la utilización de la servo-válvula, al
chocar contra la base. En el caso de la utilización de la servo-válvula y la
toma de aspiración del brazo telescópico no se produce la succión de la
carga por pérdidas en la servo-válvula. Este hecho se debe a que las
pérdidas en la válvula sumadas a las pérdidas en el brazo telescópico son
considerables.
Se concluye que es imprescindible un buen diseño y construcción de la
servo-válvula para evitar pérdidas de carga importantes en le circuito de
aspiración. La potencia de aspiración, es más que suficiente para la
aspiración independiente por brazo telescópico o base.
La no introducción de cargas voluminosas por la boca del brazo
telescópico queda justificada por el diseño de la misma. En este proyecto,
se concibió el brazo telescópico como complemento a la limpieza realizada
por la toma base del robot aspirador. Es por ello, que únicamente se
pretende aspirar polvo o partículas de poca masa presentes generalmente
en los lugares más inaccesibles del hogar.
Todos los intentos de aspiración de tornillos, resultaron fallidos debidos a
su alargada forma. Al tratarse de un robot aspirador el circuito de
aspiración debe estar confinado en un volumen muy reducido, la
aparición de codos o pequeños ángulos es inevitable. Las cargas más
alargadas, aunque no sean de gran masa, quedan atascadas en los codos
del tubo flexible de aspiración.

Memoria. Resultados/Experimentos 101
3. RESULTADOS PRUEBAS DE NAVEGACIÓN
El algoritmo tachado como “algoritmo corto” consiste en la navegación del
robot utilizando cada cierto tiempo una variable aleatoria, que es tenida en
cuenta cada poco tiempo, para la realización indistinta de giros a la
izquierda o a la derecha del robot.
El algoritmo tachado como “algoritmo largo” consiste en la navegación
del robot utilizando cada cierto tiempo una variable aleatoria, que es
tenida en cuenta cada mucho tiempo, para la realización indistinta de
giros a la izquierda o a la derecha del robot.
Los algoritmos “corto” y “largo” únicamente se probaron en el entorno
estructurado. Para un entorno estructurado es aconsejable siempre utilizar
el “algoritmo corto”.
Para más información sobre las condiciones de la prueba consúltese el
apartado 2.1 Definición del protocolo de pruebas para entorno
estructurado.
La siguiente tabla muestra los resultados de las pruebas de navegación en
entorno estructurado. En la prueba figuran los resultados de dos
algoritmos distintos de navegación.

Memoria. Resultados/Experimentos 102
PRUEBA NAVEGACIÓN CON ALGORITMO CORTO
Tiempo
de prueba
minutos
Número
total de
baldosas
Número
baldosas
visitadas
Número
baldosas
sin visitar
Velocidad
del robot
aspirador
Eficiencia
en %
8.5 121 87 34 9.52 cm/s 72
8.5 121 82 39 9.52 cm/s 67
Tabla 15: Resultados navegación algoritmo corto
PRUEBA NAVEGACIÓN CON ALGORITMO LARGO
Tiempo
de prueba
minutos
Número
total de
baldosas
Número
baldosas
visitadas
Número
baldosas
sin visitar
Velocidad
del robot
aspirador
Eficiencia
en %
8.5 121 112 9 9.52 cm/s 93
8.5 121 107 14 9.52 cm/s 88
Tabla 16: Resultados navegación algoritmo largo
Como puede apreciarse de las tablas anteriores, el algoritmo largo es más
eficiente en entornos grandes estructurados. La eficiencia máxima
conseguida por el aspirador se sitúa en el 93% de superficie visitada en el
tiempo establecido. La velocidad media del robot fue de 9,52cm/s en
todas las pruebas. El tamaño de baldosa es de 32 x 33 cm lo que supone un
área total de la prueba de 32 x 33 x 121 =127.776 2cm que equivalen a una
superficie de aproximadamente 13 2m .
Una vez estudiados los resultados de la prueba de navegación en entorno
estructurado, se pasará a comentar las pruebas en el entorno
desestructurado. Para más información sobre las condiciones de la prueba

Memoria. Resultados/Experimentos 103
consúltese el apartado 2.2 Definición del protocolo de pruebas para
entorno desestructurado.
Los resultados de las pruebas realizadas son satisfactorios. El brazo
telescópico se introdujo correctamente en los lugares de reducido acceso.
El comportamiento general del aspirador fue el adecuado, el brazo
telescópico se mantuvo retraído durante la navegación y aspiración por la
base.
El robot aspirador reaccionó ante la posible caída por escaleras a tiempo
sin llegar a caer. El recorrido realizado por la habitación seleccionada fue,
aunque aleatorio, bastante eficaz y poco repetitivo.
Para la ampliación de los resultados de la prueba se recomienda explorar
el CD-ROM incluido en el proyecto. Dicho CD-ROM dispone de varios
videos en formato *.avi que lo corroboran.

Memoria. Conclusiones 104
Capítulo 5 CONCLUSIONES
En este apartado se expondrán las conclusiones del proyecto, la medida de
cumplimiento de los objetivos y las aportaciones complementarias
realizadas.
El objetivo principal de proyecto, que consiste en el diseño y construcción
de una aspiradora inteligente para la limpieza automática de las casas, fue
alcanzado satisfactoriamente y en el tiempo establecido.
El problema de incorporación de un brazo telescópico en el robot
aspirador fue resuelto con la utilización de una antena eléctrica de
automóvil y un conjunto de tubos.
Se estudió el comportamiento del nuevo robot aspirador construido y
único en su categoría obteniendo importantes conclusiones:
1. La introducción de un brazo telescópico en el robot aspirador es
factible y se traduce en una mejora substancial de la superficie
disponible para aspirar.
2. La colocación del brazo telescópico debe realizarse
transversalmente al sentido de la marcha del robot aspirador. El
despliegue del brazo telescópico por la izquierda o derecha del
robot es indiferente.

Memoria. Conclusiones 105
3. El brazo telescópico abre la posibilidad de incorporación de una
válvula que seleccione el lugar por donde realizar la succión, por la
base o por el brazo.
4. La servo-válvula de gestión de aspiración debe ser estanca y ofrecer
las mínimas pérdidas de carga en el circuito de aspiración. Se
recomienda la utilización de una válvula de bola de tres vías,
dichas vías deben formar 120º entre si.
5. La forma exterior del robot aspirador debe ser preferiblemente
circular. De esta forma se facilita el diseño y la navegación del
robot.
6. La longitud del brazo telescópico debe estar comprendida entre los
0.5m y los 1.3m. Longitudes inferiores no mejorarán la superficie
accesible para aspiración, medidas mayores complicarán la elección
de los materiales y la integración del brazo telescópico en el robot
aspirador.
7. La altura del brazo telescópico puede ser reducida con modelos de
antena eléctrica más adecuados. El brazo telescópico, únicamente
quedaría limitado a la limpieza del polvo. La suciedad de mayores
dimensiones requiere una elevación del extremo de la boca con la
consecuente pérdida de carga asociada. Con el modelo prototipo,
dada la poca eficiencia de la servo-válvula no fue posible aspirar
grandes partículas.
8. Es posible reducir en gran medida el diseño exterior del robot
aspirador prototipo realizado en este proyecto. La incorporación
del brazo telescópico no implica un aumento considerable del
tamaño del conjunto.
9. Es aconsejable mantener la estructura de tracción diferencial para el
movimiento del robot aspirador. Esta estructura facilita la
implantación mecánica y la programación.

Memoria. Conclusiones 106
10. La potencia de aspiración de 60W utilizada puede reducirse
invirtiendo esfuerzos en la mejora de la servo-válvula y en el acople
de los segmentos que forman el brazo telescópico. El tope
tecnológico hasta la fecha parece rondar los 25W. Debe estudiarse la
posibilidad de reducción de potencia de la aspiradora una vez
optimizada la servo-válvula.
11. El sistema de barredores laterales (Sweepers) se muestra bastante
efectivo con cargas medianas y grandes, pero se aconseja introducir
en el robot aspirador un sistema de cepillos sofisticado para la
mejora de la efectividad de aspiración. Las cerdas de los cepillos
barredores sobresaldrán de la planta del robot aspirador.
12. Las bocas de aspiración utilizadas resultaron ser muy efectivas. La
focalización de la suciedad en un punto de los barredores laterales
permite, con la utilización de una boca estrecha, la mejora de la
capacidad de succión del robot. La boca de aspiración del brazo
telescópico se muestra implacable con pequeñas partículas de
polvo.
13. Las baterías son un aspecto muy importante en el robot aspirador.
Debe procurarse, en la medida de lo posible, seleccionar una
tecnología que garantice una reducción de peso respecto al plomo-
ácido.
14. La altura del robot aspirador prototipo no es tan determinante
como en el caso de los aspiradores robóticas sin brazo, pero es
conveniente mantenerla lo más baja posible. Para lograr reducirla,
se aconseja la realización de un diseño de bolsa de aspiración
adaptado a la forma del robot, la colocación de baterías de poca
anchura, la reducción del tamaño de los motores y ruedas, la
confección de una carcasa exterior de perfil mínimo y la
implantación de un motor de aspiradora más pequeño.

Memoria. Conclusiones 107
15. Los motores de tracción utilizados han resultado suficientes para
desplazar el robot aspirador. La velocidad de 9,52 cm/s debe ser
mejorada hasta 20 cm/s (tope tecnológico hasta la fecha). Si se
realizan mejoras considerables en el peso del conjunto, es
aconsejable recalcular la potencia de los nuevos motores.
En lo que se refiere a las aportaciones complementarias a los objetivos
esenciales del proyecto destacamos:
1. Incorporación de una servo-válvula de gestión de toma de
aspiración.
2. Incorporación de un sistema de barredores laterales o sweepers y
sus actuadores correspondientes.
3. Posibilidad de recarga más sencilla mediante dos simples bananas
de una fuente de alimentación.
4. Sensor de luminosidad para la señalización del conjunto robot
aspirador durante operaciones nocturnas.
5. Elaboración de una carcasa exterior para el robot aspirador
prototipo.
6. Incorporación de sensores de caída por escaleras.
7. Incorporación de sensor detector de batería baja del aspirador.
8. Implantación de placa de alimentación que permite aislar la
alimentación de diversos bloques del aspirador, para la depuración
de fallos la unidad.
9. Incorporación de alarma de señalización acústica para emergencias.
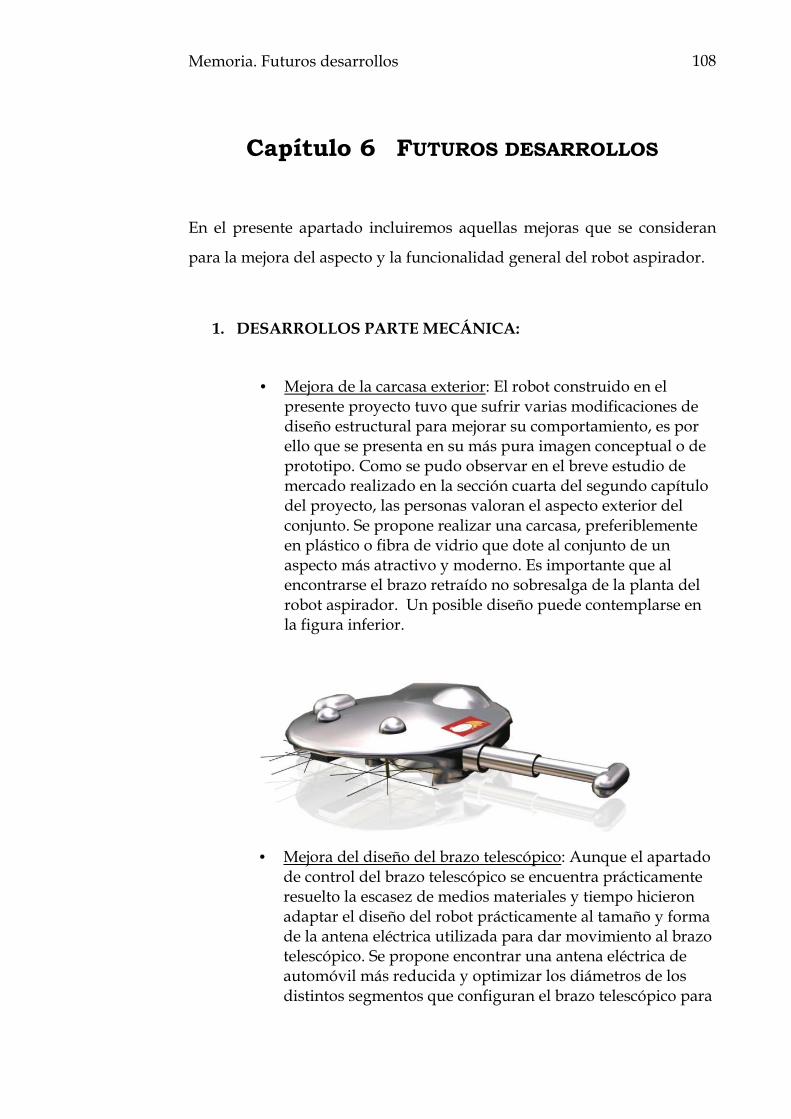
Memoria. Futuros desarrollos 108
Capítulo 6 FUTUROS DESARROLLOS
En el presente apartado incluiremos aquellas mejoras que se consideran
para la mejora del aspecto y la funcionalidad general del robot aspirador.
1. DESARROLLOS PARTE MECÁNICA:
• Mejora de la carcasa exterior: El robot construido en el presente proyecto tuvo que sufrir varias modificaciones de diseño estructural para mejorar su comportamiento, es por ello que se presenta en su más pura imagen conceptual o de prototipo. Como se pudo observar en el breve estudio de mercado realizado en la sección cuarta del segundo capítulo del proyecto, las personas valoran el aspecto exterior del conjunto. Se propone realizar una carcasa, preferiblemente en plástico o fibra de vidrio que dote al conjunto de un aspecto más atractivo y moderno. Es importante que al encontrarse el brazo retraído no sobresalga de la planta del robot aspirador. Un posible diseño puede contemplarse en la figura inferior.
• Mejora del diseño del brazo telescópico: Aunque el apartado de control del brazo telescópico se encuentra prácticamente resuelto la escasez de medios materiales y tiempo hicieron adaptar el diseño del robot prácticamente al tamaño y forma de la antena eléctrica utilizada para dar movimiento al brazo telescópico. Se propone encontrar una antena eléctrica de automóvil más reducida y optimizar los diámetros de los distintos segmentos que configuran el brazo telescópico para

Memoria. Futuros desarrollos 109
conseguir menores pérdidas en las uniones entre segmentos y una mayor longitud del brazo (1.10 metros es lo ideal).
• Mejora del diseño de los cepillos: El robot aspirador cuenta con un sistema de cepillos delanteros cuya misión es canalizar la suciedad hacia la boca base de aspiración. Se propone dotar al sistema de un sistema de cepillos con algún tipo especial de cerdas que optimice la limpieza de superficies blandas (como las alfombras) y duras (como la baldosa).
• Mejora en ruedas motrices: Las ruedas incluidas en el prototipo son de un material plástico bastante duro y con bajo coeficiente de rozamiento. Éste hecho es muy relevante ya que en ciertas situaciones podría deteriorar suelos de madera o resbalar ante condiciones de humedad. Se propone sustituir las ruedas motrices por otras fabricadas de un material esponjoso, suave pero a la vez suficientemente rígido como el neopreno de alta densidad. El producto se encuentra disponible en el mercado a un precio poco razonable.
• Mejora diseño servo-válvula de distribución de aspiración: La servo-válvula es un elemento fundamental en el robot aspirador ya que canaliza la succión para que se produzca por la base del robot o por el brazo telescópico. En el presente proyecto se adaptó al diseño a lo que podía proporcionar la industria de forma económica. Para optimizar la canalización del flujo de aire y reducir al máximo la pérdida de carga por codos en la válvula se propone el siguiente diseño en V a aproximadamente 120º:
Figura 47: Detalle funcionmiento válvua Figura 48: Detalle funcionmiento válvua II

Memoria. Futuros desarrollos 110
• Mejora del diseño de bolsa de aspiración: La bolsa de aspiración en un importante en el robot aspirador ya que delimita, en muchos casos, la autonomía y la eficiencia de la aspiración. Se propone sustituir el recipiente almacenador de suciedad por uno con una forma que se amolde más al espacio asignado al elemento bajo el aspirador. La medida podría incorporar algún tipo de filtro bacteriano (HEPA) que haría que la limpieza del robot aspirador no dañara a personas alérgicas. También sería interesante diseñar un testigo de suciedad electrónico incorporado en la bolsa.
2. DESARROLLOS PARTE ELÉCTRICA-ELECTRÓNICA:
• Mejora del sistema de baterías: Para el prototipo del proyecto se utilizaron baterías de plomo-ácido de 12V y 6V. Este tipo de baterías tiene como inconveniente el elevado volumen y peso que añaden al robot aspirador. La razón fundamental que tuvo su utilización es su bajo precio. Las baterías de plomo también cuentan con una vida mucho más reducida comparada con las nuevas baterías de Litio (vida de unos 5-7 años) ya incorporadas en el campo de la telefonía móvil. La mejora que se propone es reemplazar las baterías de plomo-ácido por otras más modernas. El cambio supondría una mejora de la autonomía de hasta el 60% y una reducción de peso de hasta el 55%.
• Desarrollo de una base de recarga de baterías: Cuando el robot aspirador detecta que su nivel de batería no es el adecuado debemos recargarlo en una base de recarga de baterías. Preferiblemente, se debería incorporar una base de recarga pensada para recargas automatizadas del robot aspirador, evitando así obligar al usuario a extraer las baterías. La figura inferior muestra una imagen conceptual del centro de recarga.
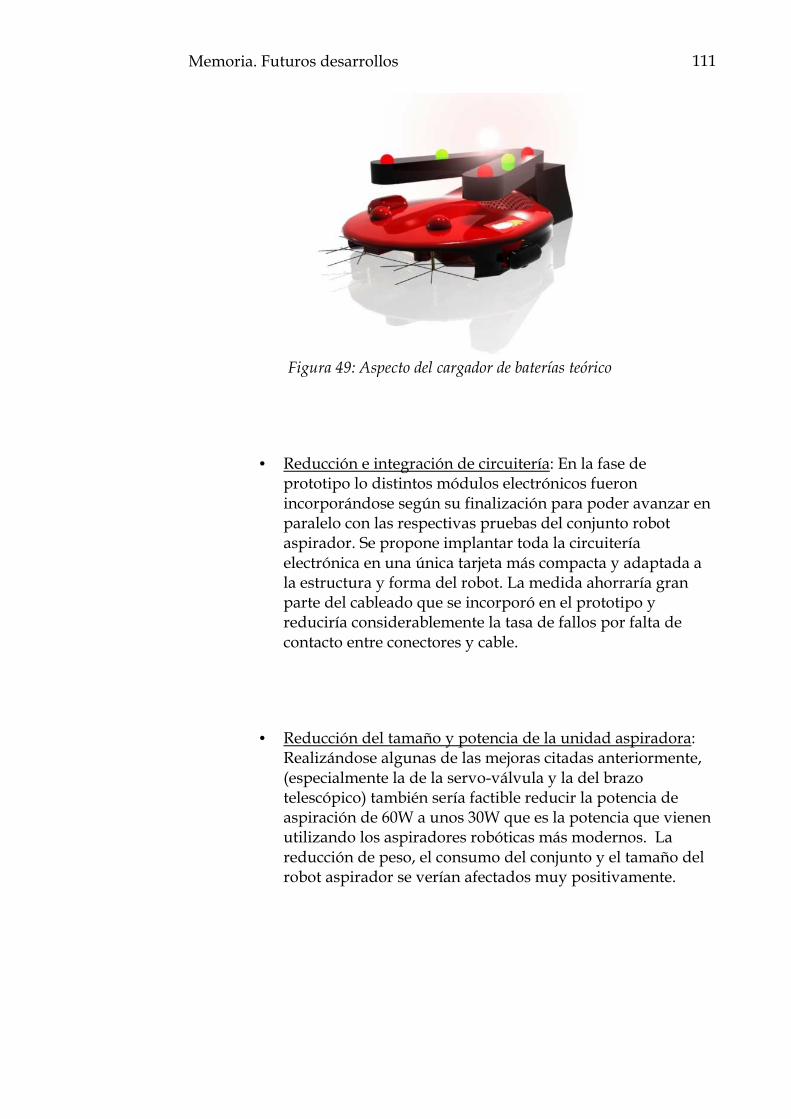
Memoria. Futuros desarrollos 111
Figura 49: Aspecto del cargador de baterías teórico
• Reducción e integración de circuitería: En la fase de prototipo lo distintos módulos electrónicos fueron incorporándose según su finalización para poder avanzar en paralelo con las respectivas pruebas del conjunto robot aspirador. Se propone implantar toda la circuitería electrónica en una única tarjeta más compacta y adaptada a la estructura y forma del robot. La medida ahorraría gran parte del cableado que se incorporó en el prototipo y reduciría considerablemente la tasa de fallos por falta de contacto entre conectores y cable.
• Reducción del tamaño y potencia de la unidad aspiradora: Realizándose algunas de las mejoras citadas anteriormente, (especialmente la de la servo-válvula y la del brazo telescópico) también sería factible reducir la potencia de aspiración de 60W a unos 30W que es la potencia que vienen utilizando los aspiradores robóticas más modernos. La reducción de peso, el consumo del conjunto y el tamaño del robot aspirador se verían afectados muy positivamente.
Memoria. Futuros desarrollos 112
• Incorporación de sensores detectores de suciedad: Se trata de un tipo especial de sensores cuya tecnología no se encuentran dispuestos a facilitar los más avanzados fabricantes de robots aspiradores. La incorporación de este tipo de sensores sería muy interesante para mejorar la relación tiempo/superficie aspirada.
3. DESARROLLOS PARTE SOFTWARE E INTELIGENCIA:
• Incorporación de nuevos comportamientos: Una vez finalizada la construcción de la base de recarga de baterías se debe incorporar una rutina de búsqueda de la estación. El comportamiento podría conseguirse mediante una comunicación vía radio entre base y robot. El robot trataría de moverse de tal manera que no choque contra obstáculos y mejore la potencia de señal recibida. El mercado ya ha dado solución al problema mediante algoritmos, que aunque algo lentos, que cubren la necesidad.
• Incorporación de nuevos comportamientos II: Con el fin de introducir alguna mejora no presente en el mercado, proponemos la comunicación del robot aspirador con ascensores. Mediante una célula infrarroja (a modo de mando a distancia de televisión) el robot podría comunicarse con el ordenador del ascensor para solicitar algún otro piso que aún no limpió. La idea surge al pensar en instalaciones como los hospitales o los grandes complejos de oficinas. Consideramos que, aunque algo futurista, existen hoy los medios para llevarla acabo. Las figuras inferiores pretenden dar una idea del funcionamiento:
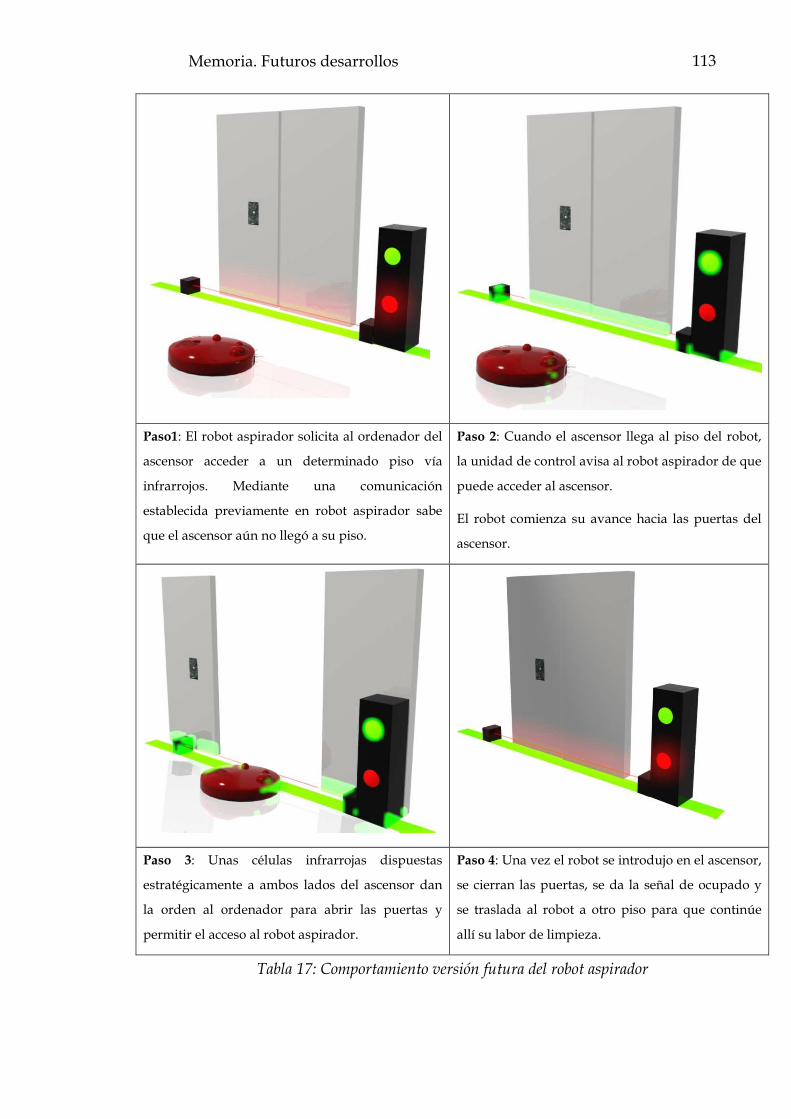
Memoria. Futuros desarrollos 113
Paso1: El robot aspirador solicita al ordenador del
ascensor acceder a un determinado piso vía
infrarrojos. Mediante una comunicación
establecida previamente en robot aspirador sabe
que el ascensor aún no llegó a su piso.
Paso 2: Cuando el ascensor llega al piso del robot,
la unidad de control avisa al robot aspirador de que
puede acceder al ascensor.
El robot comienza su avance hacia las puertas del
ascensor.
Paso 3: Unas células infrarrojas dispuestas
estratégicamente a ambos lados del ascensor dan
la orden al ordenador para abrir las puertas y
permitir el acceso al robot aspirador.
Paso 4: Una vez el robot se introdujo en el ascensor,
se cierran las puertas, se da la señal de ocupado y
se traslada al robot a otro piso para que continúe
allí su labor de limpieza.
Tabla 17: Comportamiento versión futura del robot aspirador

Memoria. Bibliografía 114
BIBLIOGRAFÍA
A continuación se incluyen las referencias bibliográficas utilizadas para la
consecución del proyecto:
• Libros consultados:
-“Microbótica” Tecnología, Aplicaciones y Montaje Práctico. Autores: José
Mª Angulo Usategui, Susana Romero Yesa, e Ignacio Angulo Martínez.
Editorial THOMSON.
-“Where am I?” Sensors and Methods for Mobile Robot Positioning.
Autores: J.Borenstein, H.R.Everett y L.Feng. Editorial The University of
Michigan. 1996 Edition.
-“Electrónica 2ª Edición”. Autor: Allan R.Hambley. Editorial: Pearson
Prentice Hall
• Artículos de revistas, presentaciones, manuales usuario, estudios etc..
-“Seminario Construcción de Robots”. Diseño y Contrucción de
Microrrobots.
Autor: D.Julio Pastor Mendoza
- “Seminario Control de Motores”. Diseño y Construcción de
Microrrobots.
Memoria. Bibliografía 115
Autor: D. Jesús Ureña Ureña.
-“iROBOT ROOMBA SE Owners Manual”.
-“Electrolux Trilobite Owners Manual”
-“Scientific American Working Knoledge Funcionamiento Cortacésped
Intelligente” Autor: Mark Fischetti.
-“A Vacuum in the Market”. Autores: F. Cassidy y T.Walker
-“European Ecolabel: Vacuum Cleaners Technical Study on Criteria
Definition and Updating”. Autor CSTB en cooperación con
CERTIFICACIÓN AFNOR para la comisión europea.
• Links de Internet y direcciones de correo :
Dirección electrónica : http://www.alibaba.com
Descripción: Página de marcado carácter comercial pero que permite conocer gran
variedad de modelos de robots aspiradores presentes en el mercado. La página incluye
breves descripciones técnicas sobre los robots aspiradores. Última visita Enero 2007.
Dirección electrónica : http://www.howstuffworks.com
Descripción: Página de curiosidades de ámbito general. Los artículos presentados son
de gran calidad y cuentan con trabajados esquemas gráficos que ayudan a la
compresión de los más complicados sistemas. Última visita Febrero 2007.
Dirección electrónica : http://www.dyson.com http://www.irobot.com

Memoria. Bibliografía 116
Descripción: Dyson e iROBOT representan la tecnología más puntera y un ejemplo de
estrategia de llegada al mercado respectivamente. Merece la pena visitar estos
fabricantes. Última visita Febrero 2007.
Dirección correo: [email protected] [email protected]
Descripción: Se trata de dos catedráticos de la universidad de Alcalá de Henares.
Durante la presentación de la aspiradora inteligente prototipo en la feria “Madrid por la
Ciencia” mostraron gran interés por el proyecto y ofrecieron su ayuda para consultas
etc..
Dirección correo : [email protected], [email protected]
Descripción: Se trata del director del presente proyecto y del alumno proyectista del
proyecto complementario Programación y Control del Brazo Telescópico.
Estudio económico. Bibliografía 117
Parte II ESTUDIO ECONÓMICO

Estudio económico. Bibliografía 118
En el apartado de resultados del presente proyecto, queda demostrado el
correcto funcionamiento del robot aspirador inteligente desarrollado. Por
ello, merece detenerse para analizar la viabilidad del traslado del
aspirador al mercado.
El mercado de las aspiradoras inteligentes movió en Estados Unidos 4.1
Billones de dólares en 2006. Es un sector que lleva creciendo entorno al 9%
desde el año 2001. Las ventas entre los años 2002 y 2003 fueron de 570.000
unidades vendidas en todo el mundo.
La aspiradora inteligente prototipo construida, cuenta con una importante
mejora tecnológica que ninguna aspiradora tenía hasta ahora: “Un brazo
telescópico aspirador inteligente”. Este hecho le dota de una gran ventaja
competitiva pero no olvidemos que es fácilmente copiable.
Aunque el aspecto estético del prototipo no es muy atractivo a la vista,
una mejora en la carcasa y en ciertos aspectos puntuales haría que
mereciera una oportunidad de entrada en el mercado. Las unidades
presentes hasta hoy, quedan claramente por debajo en cuanto al acceso a
rincones se refiere. El modelo desarrollado de aspirador entraría a
sustituir la tecnología existente sin brazos telescópicos.
La elección de un buen modelo de negocio, la estrategia de introducción
del producto en el mercado y la elección del momento, podrían convertir
al hoy prototipo aspirador en un producto estrella en el sector de los
electrodomésticos.

Manual de usuario. Bibliografía 119
Parte III MANUAL DE USUARIO
Manual de usuario. Bibliografía 120
www.upco.es

Manual de usuario. Bibliografía 121
ÍNDICE DEL MANUAL
Instrucciones importantes de seguridad………………………3
Descripción del producto………….……….……………...…….……6
Carga y recambio de las baterías………..……………………...…8
Puesta en marcha, parada y pausa………………………….........9
Guía de problemas y soluciones………………………………….12
Especificaciones técnicas……………………………………………..14
Manual de usuario. Bibliografía 122
Instrucciones Importantes de Seguridad
Peligro Advertencia Precaución
INSTRUCCIONES GENERALES DE SEGURIDAD
Campos de utilización
• Utilice el aspirador para limpiar sólo suelos domésticos comunes, incluyendo madera, baldosas, linóleo, moquetas de pelo corto y medio.
• No utilice el aspirador para limpiar:
- Suelos mojados (incluyendo por líquidos inflamables o combustibles).
- Baños, cocinas u otras habitaciones húmedas.
- Escaleras.
- Mesas y estanterías.
- Objetos ardiendo o humeando (cigarrillos, cerillas, cenizas calientes).
- Habitaciones sin vigilar con chimeneas abiertas o sistemas de la calefacción de fuego vivo (braseros).
Niños, animales y otras consideraciones
• El robot aspirador no es un juguete. Vigile los niños pequeños y los animales de compañía para que no jueguen con el aparato.
• No se siente ni apoye nada sobre el robot. Podría romperse.
ANTES DE LIMPIAR
Riesgo de caída

Manual de usuario. Bibliografía 123
• El robot no puede detectar desniveles inferiores a 10 centímetros. Por tanto, puede caerse por una escalera o de una terraza si el desnivel es pequeño. Por consiguiente, asegúrese que no puede caerse por ningún sitio.
Objetos en el suelo
• Antes de utilizar la unidad, recoja los objetos como ropa, papeles sueltos, manteles, telas, cables, y objetos frágiles. Podrían impedir el correcto funcionamiento del robot.
• Retire también los objetos pequeños que puedan ser aspirados y que no quiera que esto suceda (monedas, billetes, fichas, etc.).
Otras consideraciones
• Antes de limpiar, asegúrese de que los cepillos están en buenas condiciones.
• Mire que la bolsa de basura del robot no esté llena y la tapa esté cerrada.
• No maneje el robot si tiene las manos húmedas
DURANTE LA LIMPIEZA
Riesgo de choque
• Para evitar tropezones con el robot, asegúrese de que todas las personas de la vivienda sepan que está funcionando.
Líquidos
• No deje que el robot limpie líquidos. Esto podría dañar seriamente el aspirador.
DESPUÉS DE LIMPIAR
Limpieza del robot

Manual de usuario. Bibliografía 124
• Limpie regularmente la superficie los sensores (especialmente los de desnivel) con un paño limpio y suave de algodón que no esté húmedo.
• Para la limpieza del resto del robot use un paño limpio y seco.
• El brazo telescópico precisa de un mantenimiento especial. Cada aproximadamente 600h de funcionamiento las uniones entre los segmentos telescópicos deben ser engrasadas con aceite multiuso.
• Mantenga las bocas de aspiración de base y brazo telescópico limpias y libres de suciedades pegajosas.
Vaciado de la bolsa de suciedad
• Vacíe con cuidado el depósito de suciedad. El polvo recogido en la unidad puede causar reacciones alérgicas a las personas sensibles.
• Es posible que el robot aspire veneno para ratas, insectos, etc. Por razones de seguridad, vacíe el polvo en una bolsa de plástico, ciérrela y tírela a la basura.
• Si lo considera conveniente, utilice guantes de fibra de látex para el vaciado de la bolsa de aspiración.
Baterías
• No tire las pilas agotadas en cualquier sitio. Envíelas al sitio indicado para reciclarlas. Infórmese en su municipio de los lugares acondicionados para el reciclaje de baterías. No olvide que se trata de un producto muy contaminante para el medioambiente.
• Bajo ninguna circunstancia caliente o exponga al fuego las baterías. Pueden llegar a explotar.
ALMACENAJE
Lugar de almacenaje
• Guarde el robot y sus accesorios en un lugar frío , ventilado y seco.
• Asegúrese que ningún menor pueda ponerla en funcionamiento accidentalmente.

Manual de usuario. Bibliografía 125
Descripción del Producto

Manual de usuario. Bibliografía 126
Manual de usuario. Bibliografía 127
Carga y Recambio de las Baterías
1. Cargue el robot durante unas cuatro horas antes de la primera utilización.
2. La unidad robot prototipo no cuenta con base y algoritmo de búsqueda de carga automática. Debe usted recargar el aspirador cuando trascurran aproximadamente 20 minutos de uso o se active la alarma acústica interna.
3. El robot aspirador cuenta con baterías de 12V y 6V. La recomendación del fabricante es cargar las baterías a 13.8V y 7.5V de tensión de flotación respectivamente.
4. Para la carga de las baterías de 12V conecte el polo positivo del cargador al hueco banana hembra y el polo negativo al hueco banana hembra negativo de la placa de alimentación.
5. La carga de la batería de 6V debe realizarse conectando unos conectores tipo cocodrilo a las bornas de la batería. Recuerde conectar el polo positivo (+) con el positivo del cargador y el polo negativo (-) al negativo del cargador.
6. La corriente de carga no debe superar los 200mA en la carga de las baterías.
7. Sea cuidadoso al desconectar las bananas de las baterías y evite el contacto entre las bornas de signo opuesto.
8. A los 2 años de funcionamiento y como mantenimiento preventivo deposite las baterías usadas en un lugar destinado especialmente a tal efecto.
No realice el proceso de carga si no cuenta con los
conocimientos necesarios. Pida ayuda o consejo a un
experto
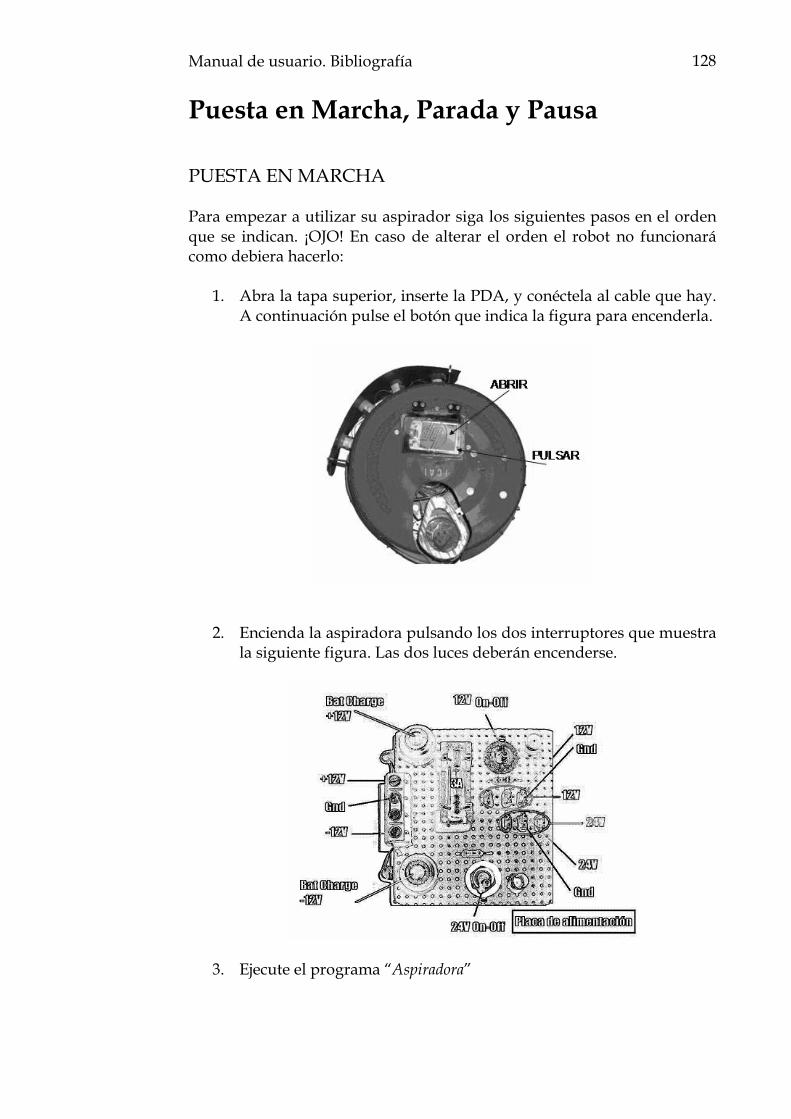
Manual de usuario. Bibliografía 128
Puesta en Marcha, Parada y Pausa PUESTA EN MARCHA Para empezar a utilizar su aspirador siga los siguientes pasos en el orden que se indican. ¡OJO! En caso de alterar el orden el robot no funcionará como debiera hacerlo:
1. Abra la tapa superior, inserte la PDA, y conéctela al cable que hay. A continuación pulse el botón que indica la figura para encenderla.
2. Encienda la aspiradora pulsando los dos interruptores que muestra
la siguiente figura. Las dos luces deberán encenderse.
3. Ejecute el programa “Aspiradora”
Manual de usuario. Bibliografía 129
4. Pulse el botón “Start”. Aparecerá un punto verde en la pantalla de la PDA. Si fuera rojo, consulte el apartado “Guía de Problemas y Soluciones” de este manual.
5. Baje la tapa superior.
PARAR EL ROBOT El robot dejará de moverse cuando se agote la batería del motor de aspiración y empezará a sonar una alarma acústica. Tanto para este caso como si se quiere parar antes el robot, los pasos que se deben seguir son:
1. Abra la tapa superior y pulse el botón “Stop” de la PDA. Aparecerá un punto verde en la pantalla de la PDA. Si fuera rojo, consulte el apartado “Guía de Problemas y Soluciones” de este manual.
2. Pulse de nuevo los dos interruptores que pulsó para encenderlo.
Las dos luces deberán apagarse. Y la alarma dejará de sonar (en caso de que lo hiciera por batería baja).
3. Apague la PDA, pulsando de nuevo el botón que usó para
encenderla. Extráigala si quiere (no es necesario). PAUSA Puede ser que quiera parar un momento el robot y a continuación volverlo a poner en marcha. En tal caso de hacer lo siguiente:
1. Abra la tapa superior y pulse el botón “Stop” de la PDA. Aparecerá un punto verde en la pantalla de la PDA. Si fuera rojo, consulte el apartado “Guía de Problemas y Soluciones” de este manual.
2. Pulse el botón “Start” cuando desee que vuelva a limpiar, y baje la
tapa.
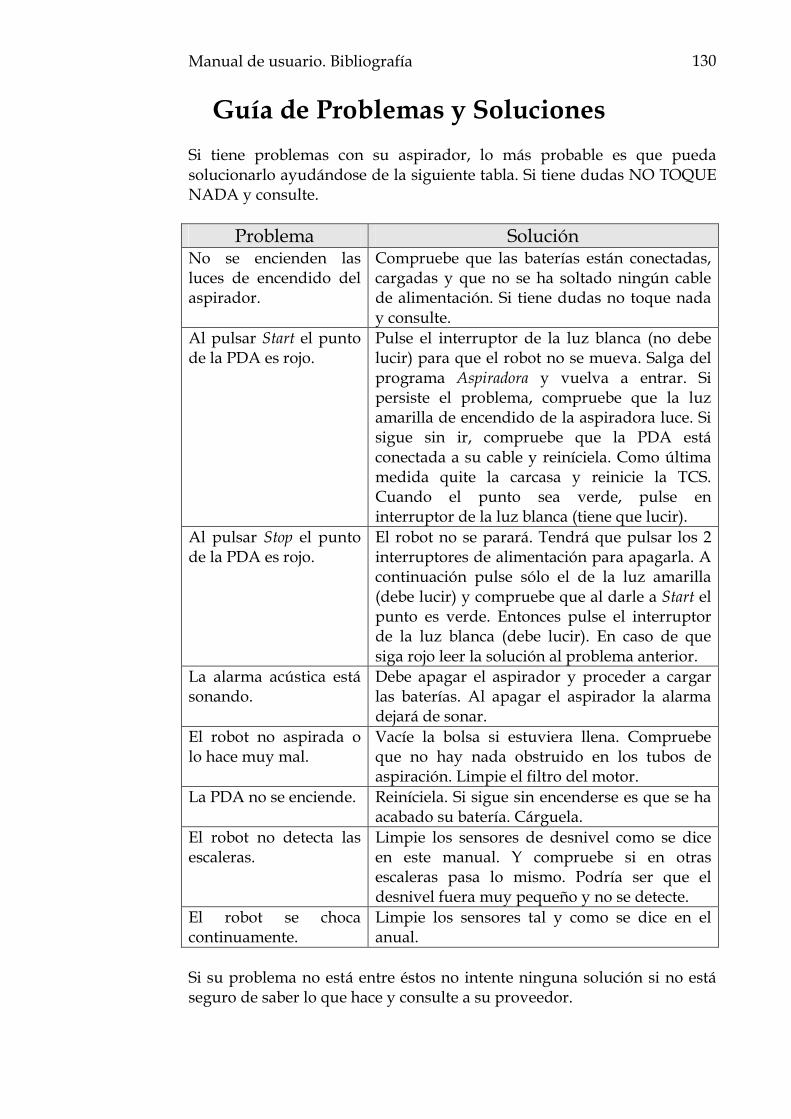
Manual de usuario. Bibliografía 130
Guía de Problemas y Soluciones Si tiene problemas con su aspirador, lo más probable es que pueda solucionarlo ayudándose de la siguiente tabla. Si tiene dudas NO TOQUE NADA y consulte.
Problema Solución No se encienden las luces de encendido del aspirador.
Compruebe que las baterías están conectadas, cargadas y que no se ha soltado ningún cable de alimentación. Si tiene dudas no toque nada y consulte.
Al pulsar Start el punto de la PDA es rojo.
Pulse el interruptor de la luz blanca (no debe lucir) para que el robot no se mueva. Salga del programa Aspiradora y vuelva a entrar. Si persiste el problema, compruebe que la luz amarilla de encendido de la aspiradora luce. Si sigue sin ir, compruebe que la PDA está conectada a su cable y reiníciela. Como última medida quite la carcasa y reinicie la TCS. Cuando el punto sea verde, pulse en interruptor de la luz blanca (tiene que lucir).
Al pulsar Stop el punto de la PDA es rojo.
El robot no se parará. Tendrá que pulsar los 2 interruptores de alimentación para apagarla. A continuación pulse sólo el de la luz amarilla (debe lucir) y compruebe que al darle a Start el punto es verde. Entonces pulse el interruptor de la luz blanca (debe lucir). En caso de que siga rojo leer la solución al problema anterior.
La alarma acústica está sonando.
Debe apagar el aspirador y proceder a cargar las baterías. Al apagar el aspirador la alarma dejará de sonar.
El robot no aspirada o lo hace muy mal.
Vacíe la bolsa si estuviera llena. Compruebe que no hay nada obstruido en los tubos de aspiración. Limpie el filtro del motor.
La PDA no se enciende. Reiníciela. Si sigue sin encenderse es que se ha acabado su batería. Cárguela.
El robot no detecta las escaleras.
Limpie los sensores de desnivel como se dice en este manual. Y compruebe si en otras escaleras pasa lo mismo. Podría ser que el desnivel fuera muy pequeño y no se detecte.
El robot se choca continuamente.
Limpie los sensores tal y como se dice en el anual.
Si su problema no está entre éstos no intente ninguna solución si no está seguro de saber lo que hace y consulte a su proveedor.

Manual de usuario. Bibliografía 131
Especificaciones Técnicas Modelo ELEFENTA 001 – Prototipo Diámetro 37 cm Altura 27 cm Peso en vacío 8.5 Kg Peso máximo en carga 10 Kg Potencia aspiración 60W Velocidad 9.52 cm/s Ruido 73 dB Batería motor aspiración Plomo-Ácido 6V 4.8 Amp/h Tiempo de carga bat. Mot. Asp. 3h Autonomía bat. Mot. Asp. 20 min Baterías motores ruedas 2x Plomo-Ácido 12V 1.4 Amp/h Tiempo de carga bat. Mot. Rued. 2.5 h Autonomía bat. Mot. Rued. 30 min Filtro de polvo Esponja polvo normal Capacidad bolsa 0.3 L Electrónica controlada por TCS-2 Sensores desnivel SHARP mod.GP2D12 Sensores proximidad Devantech Ltd. mod. SRF04 Sensores control brazo SHARP mod.GP2D12 Material de la carcasa Plástico Velocidad máxima del brazo 15 cm/s Ruedas motrices 2x 7.5 cm diámetro Distancia al suelo desde plataforma base
13 cm
Capacidad para aspirar suelos húmedos
No cuenta con capacidad para aspirar suelos húmedos
Material de la bolsa Plástico Temperatura de uso 10º- 50º Accesorios No disponible Avisador de bolsa llena Nivel de suciedad visible a través
de bolsa trasparente Señalización de funcionamiento SÍ, 10 luces LED para condiciones
de trabajo nocturnas Tiempo en limpiar 15 2m 8.5 min

Presupuesto Económico. Bibliografía 132
Parte IV PRESUPUESTO ECONÓMICO

Presupuesto Económico. Bibliografía 133
A continuación se presenta el presupuesto económico para la realización
del robot aspirador prototipo.
SUBCONJUNTO DESCRIPCIÓN DEL ARTÍCULO UNIDADES PRECIO
COMPRA UNIDAD €
TOTAL €
BRAZO TELESCÓPICO Antena eléctrica 12V 12W 1 35 35
Boca aspiracion 1 2 2 Sensores infrarrojos gp2d12 36 3 18,35 55,05 Sensores digitales 4 2,5 10 tubo PVC diam 24mm long 390mm 1,5€/m 1 0,59 0,59 tubo PVC diam 30mm long 400mm 1,5€/m 1 0,6 0,6 tubo PVC diam 20mm long 380mm 1,5€/m 1 0,57 0,57 Tornillo metrica C.Ancha Hend Azinc 5x60 2 0,25 0,5 Arandelas AC.zincado D.5 8 0,09 0,72 Tuerca métrica C.cilind Hend A.zinc 4x12 6 0,06 0,36 Tuercas Mariposa AC.zincado D.5 2 0,14 0,28 Tornillo métrica C.cilind Hend A.zinc 4x12 2 0,12 0,24 Pieza mecano 1 0,5 0,5 Bridas 2.5x100mm 8 0,1 0,8 Extensor cable retráctil USB portátil 1 1,75 1,75 Tubo plastico transpa. long 300mm 3€/m 1 0,9 0,9 Cerdas escoba 1 0,4 0,4
Total Brazo Telescópico 110,26 €
SWEEPERS (BARREDORES)
Motores con reductora ref GH12/2217Y 12V 600mA 120rpm 2 19,55 39,1
Bridas 2.5x100mm 4 0,1 0,4 Tornillo metrica C.Ancha Hend Azinc 5x60 4 0,25 1 Arandelas AC.zincado D.5 8 0,09 0,72 Tuercas Mariposa AC.zincado D.5 4 0,14 0,56 Tuerca métrica C.cilind Hend A.zinc 4x12 4 0,06 0,24 Discos de pulido/barnizado madera 2 3 6 Tornillo métrica C.cilind Hend A.zinc 4x12 4 0,12 0,48
Total Sweepers
(Barredores) 48,50 € BASE DEL ROBOT
Base madera 0,2 m2 6€/m2 1 1,2 1,2 Liston de madera 2x2,5cm2 long 400mm 1 0,54 0,54 Tacos madera 4,5x4,5cm long 8 2 0,2 0,4 Soporte motores de madera 2 1,5 3 Motores con reductora 24V 0.8A 250rpm 2 40 80 Rueda loca 1 3,5 3,5 Pinza papel 3 0,2 0,6 Tuerca métrica C.cilind Hend A.zinc 4x12 16 0,06 0,96 Arandelas AC.zincado D.5 13 0,09 1,17 Motor aspiradora 60W 6V Moulinex 1 50 50 Válvula esfera pegar PVC-Pres EPE D20 1 6,54 6,54

Presupuesto Económico. Bibliografía 134
Manguito liso H-H PVC-PRES EPE D20 1 0,42 0,42 Tubo plástico long 200mm 1 2,5 2,5 Boca base aspiración plástico 1 2 2
Bolsa suiedad (recipiente de pelotas de tenis 1 1,1 1,1
Escuadras ángulo 30x30mm Bicr mod 3 0,15 0,45 Tuerca métrica C.cilind Hend A.zinc 4x12 3 0,06 0,18 Tuercas Mariposa AC.zincado D.5 3 0,14 0,42 Pintura madera color rojo LEROY MERLÍN 1 9,66 9,66 Barniz madera LEROY MERLÍN 1 9,95 9,95 Ruedas motrices diámetro 7,5 cm 2 2,15 4,3 Bateria 6V plomo-acido 4,8 A/h 1 20 20 Bateria 12V plomo-acido 1,2 A/h 2 14,71 29,42 Sens ultrasonicos SRF04 DEVANTECH 4 19,25 77 Sens infrarrojos gp2d12 36 2 18,35 36,7 Cinta velcro recambio tesa 5,60M 1 5,78 5,78 Servo FUTABA S3010 5V Par 6,5Kg 1 25 25 Total Base Robot 372,79 €
CARCASA EXTERIOR
Cubo lavandería diam 500mm 1 4,6 4,6 Pintura spray efecto decor sat nitro 400ml 1 7,68 7,68 Pintura spray efecto decor brillo 400ml 1 12,55 12,55 Tornillo metrica C.Ancha Hend Azinc 5x60 4 0,25 1 Led luz difusa 10 0,2 2 Visagra 2 piezas corta para arcón 1 2,7 2,7 Arandela AC.zincado D.5 20 0,09 1,8 Interruptor 2 circuitos 3A 1 1,75 1,75 Burlete umbral tesa marrón 1 2,9 2,9 Microinterruptor 4 0,4 1,6 PLACA ILUMINACION Amplificador operacional LF411 3 0,5 1,5 Resistencia 0,25W 12 0,09 1,08 Resistencia 2W 1 0,2 0,2 Clemas sujecion cable 2 0,75 1,5 Potencioetro 10K 1 0,2 0,2 Transistor de potencia BD135/137/139 1 0,9 0,9 Placa de insercion baquelita 9x8cm2 1 5,5 5,5 Sensor luminosidad LDR 1 1 1 Total Carcasa Exterior 50,46 €
PLACAS ELECTRONICAS
ACTUADOR ASPIRADOR Led luz difusa 2 0,2 0,4 Timbre electrónico 1 0,8 0,8 Microinterruptor 1 0,4 0,4 Transistor señal npn 3904 1 0,3 0,3 Portafusible 1 0,42 0,42 Fusible 16A 1 0,14 0,14 Relé 4571 1 N0 13/30A 12V (SPB) 2 2,33 4,66 Resistencia 0,25W 4 0,09 0,36

Presupuesto Económico. Bibliografía 135
Disipador 1 0,8 0,8 Diodo de potencia BYW80-200 1 1,3 1,3 Placa inserción fibra vidrio 12x5cm2 1 8 8 Diodo 1 0,3 0,3 Conectores de insercion placa 3 0,75 2,25 PUENTE H ANTENA Transistor señal npn 3904 1 0,3 0,3 Diodo 4 0,3 1,2 Resistencia 0.25W 2 0,09 0,18 Zocalo 18 pines 1 0,5 0,5 Integrado L293B 1 2,57 2,57 Conector de insercion placa 4 0,75 3 Placa inserción fibra vidrio 4x7cm2 1 4 4 PUENTE H MOTORES DE TRACCION Transistor señal npn 3904 2 0,3 0,6 Diodo 8 0,3 2,4 Resistencia 0.25W 4 0,09 0,36 Zocalo 18 pines 1 0,5 0,5 Integrado L293B 1 2,57 2,57 Conector de insercion placa 5 0,75 3,75 Placa inserción fibra vidrio 4x7cm2 1 4 4 PLACA ALIMENTACION Clemas de insercion placa 2 cables 2 0,75 1,5 Banana hembra 2 0,8 1,6 Interruptor 3A 1 circuito 2 1,5 3 Led luz difusa 2 0,2 0,4 Resististencia 0.25W 2 0,09 0,18 ACTUADORS WEEPERS Relé 12V 10A 2 contactos 1 2,15 2,15 Portafusible inserción en placa 1 0,42 0,42 Fusible 4A 1 0,14 0,14 Transistor señal npn 3904 1 0,3 0,3 Diodos 2 0,3 0,6 Resistencia 0.25W 2 0,09 0,18 Conectores de insercion placa 3 0,75 2,25 Placa insercion fibra vidrio 7x4cm2 1 4 4 COMPARADOR NIVEL BATERIA Amplificadores operacionales LF411 3 0,5 1,5 Led luz difusa 2 0,2 0,4 Zocalo 18 pines 3 0,5 1,5 Resist 0.25W 7 0,09 0,63 Microinterruptor 1 0,4 0,4 Clema de insercion placa 2 0,75 1,5 Placa insercion fibra vidrio 10x3,5cm2 1 6 6 TCS (MICROCONTROLADORA) 1 35 35 PDA HP iPAQ hx2190 1 384 384
Total Placas Electrónicas 493,71 €
OTROS MATERIALES
Pegamento loctite Super Glu-3 3 5,9 17,7

Presupuesto Económico. Bibliografía 136
Estaño soldadura Salki ref. 8500118 1 1,95 1,95 Cartucho silicona 3 0,6 1,8 Cable termorretractil 50cm 5€/m 1 2,5 2,5
Cable 2x0,75mm Rojo/Negro 4,5m 0,43€/m 1 1,94 1,94
Cable 4mm 1m 0,88€/m 1 0,88 0,88 Pieza lego 7 0,2 1,4 Total Otros Materiales 28,17 €
TOTAL COSTE MATERIALES Total Brazo Telescópico 110,26 €
Total Sweepers (Barredores) 48,50 € Total Base Robot 372,79 €
Total Carcasa Exterior 50,46 € Total Placas Electrónicas 493,71 €
Total Otros Materiales 28,17 € TOTAL 1.103,89 €
TOTAL COSTE MANO DE OBRA DIRECTA Precio hora ingeniero €/h 40,00 €
Horas por semana 40 CÁLCULO HORAS MANO OBRA DIRECTA
Número de semanas Horas Total euros
Documentación Previa 4 160 6.400,00 €
Desarrollo Técnico
Ingeniería y Diseño (Mecanica. y Control)
3 120 4.800,00 € Ejecución de circuitería electrónica y
montaje eléctrico del conjunto 5 200 8.000,00 € Programación TCS
(Microcontroladora) 2 80 3.200,00 €
Supervisón, Pruebas y Chequeo 2 80 3.200,00 € Documentación del Proyecto 1,5 60 2.400,00 €
TOTAL € 28.000 €
TOTAL COSTES INDIRECTOS
Descripción del concepto Coste € Gastos de servicios generales. Luz, equipos y comunicación 15,00 €
Gastos adicionales de materiales deteriorados 10,00 € TOTAL € 25,00 €
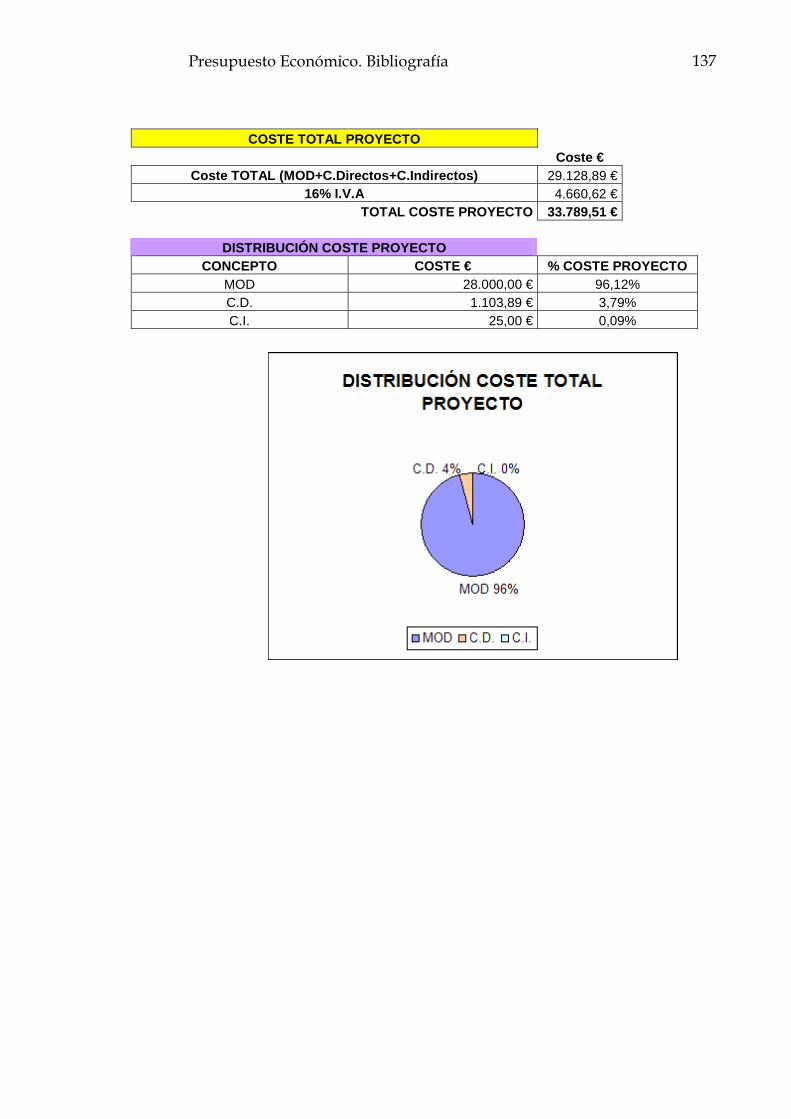
Presupuesto Económico. Bibliografía 137
COSTE TOTAL PROYECTO Coste €
Coste TOTAL (MOD+C.Directos+C.Indirectos) 29.128,89 € 16% I.V.A 4.660,62 €
TOTAL COSTE PROYECTO 33.789,51 €
DISTRIBUCIÓN COSTE PROYECTO CONCEPTO COSTE € % COSTE PROYECTO
MOD 28.000,00 € 96,12% C.D. 1.103,89 € 3,79% C.I. 25,00 € 0,09%

Data sheets. Bibliografía 138
Parte V DATA SHEETS