Ordenagailu bidezko sisemen kontrola · eten hori exekutatzen den bakoitzean, 5 kontrol-algoritmoa...
20
Transcript of Ordenagailu bidezko sisemen kontrola · eten hori exekutatzen den bakoitzean, 5 kontrol-algoritmoa...


aurkibidea
HITZAURREA........................................................................................................ 5
1 SARRERA .................................................................................................. 9
2 LAGINKETA................................................................................................ 31
3 SISTEMA DISKRETUAK ................................................................................ 51
4 Z TRANSFORMATUA.................................................................................... 91
5 BEGIZTA ITXIKO SISTEMEN TRANSFERENTZIA-FUNTZIOA ................................. 151
6 ERANTZUN HARMONIKOA ............................................................................ 189
7 EGONKORTASUNA...................................................................................... 215
8 DIGITALIZAZIOA ......................................................................................... 269
9 SINTESI DISKRETUA.................................................................................... 297
10 RST ERREGULADOREA............................................................................... 379
11 IDENTIFIKAZIOA.......................................................................................... 449
12 KONTROL MOLDAKORRA............................................................................. 497
13 EGOERA-ADIERAZPENA .............................................................................. 525
14 ZENBATESPENA ......................................................................................... 625
15 HOBETZE-KONTROLA ................................................................................. 661
16 KONTROL ESTOKASTIKOA ETA IRAGARTZE-KONTROLA................................... 685

9
1 Sarrera
1.1 AUTOMATIKAREN DEFINIZIOA ETA ORDENAGAILU BIDEZKO KONTROLA
Automatika deritzo sistemen kontrola lantzen duen ingeniaritzako atalari. Definizio horrekin batera beste zenbait galdera datozkigu burura. Lehenik, zer da sistema bat?, eta, gero, zer esan nahi du kontrola hitzak? Automatikaren esparruan, sistemaren kontzeptua oso garrantzitsua da. Gure ingurune fisikoaren atal bat edo zati bat besterik ez da sistema. Gure ingurune fisikoan, makina bat, hegazkin bat, auto bat edo makina-multzo bat izan dezakegu; sistema biologiko bat ere izan dezakegu. Beraz, gure ingurune fisikoko atal bat da sistema.
Automatikan sistema bat kontrolatu nahi dugunean, argi izan behar dugu zein den kontrolatu nahi dugun sistema, bai eta zein diren gure sistemaren mugak, beste ingurune fisikoetatik ongi bereizi ahal izateko. Sistemaren aukeraketa aztertu eta landu nahi dugunaren araberakoa da. Beraz, aplikazioaren arabera, sistema bat edo beste bat aukeratu beharko dugu.
Kontrola da beste kontzeptu garrantzitsu bat. Sistemei egotzi beharreko tekniken multzoa da kontrola, sistema batek era jakin batean lan egin dezan, gizakien inolako eragin zuzenik gabe. Teknika horiek multzo fisikoak eta algoritmoak lantzen dituzte. Multzo fisikoen artean daude, adibidez, konputagailuak, zirkuitu elektronikoak, motor baten abiadura neurtzen duen egitura mekanikoa (in.: encoder); beste era batera esanda, sistema kontrolatzeko aztertu beharreko aspektu fisiko guztiak daude.

10
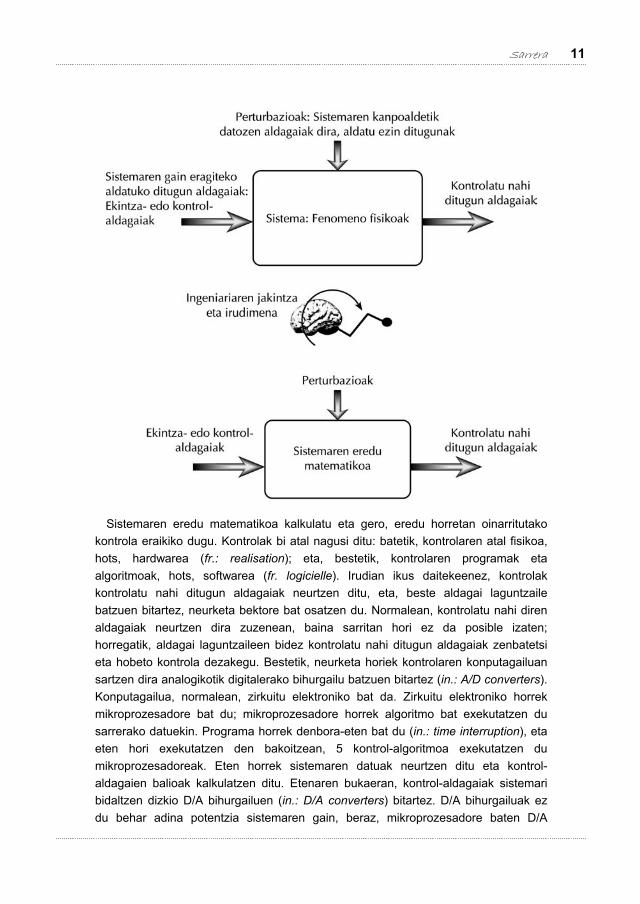
Kontrolaren barruan beste alde garrantzitsu bat ere badago: sistema baten kontrola egiteko ez da nahikoa neurgailu edota eragingailu on batzuk izatea (in.: actuators; adibidez, potentzia elektronikoaren artezgailuak –in.: AC/DC converters–, zilindro pneumatikoak, etab.); horrez gain, beharrezkoa da konputagailuan edo mikroprozesadorean sartuko ditugun programak egitea. Programa horiek kalkulatzen dute, algoritmo baten bitartez, sistemaren gainean nola eragin behar dugun. Beraz, ondorengo irudian ikus daitekeen modura, sistema da guk kontrolatu nahi dugun unibertsoko atala.
Irudian, bestalde, komunikazio-satelite bat ere ikus daiteke. Satelite hori espazioan nola higitzen den kontrolatu nahi dugu; beraz, satelite hori inguruko guztiez bereizi eta gure sistema definitzen dugu.
Ondoren, sisteman eragiten duten fenomeno fisiko garrantzitsu guztiak aztertuko ditugu. Horretarako, ingeniariaren jakintza eta esperientzia jokoan sartzen dira. Une horretan aukeratzen dira kontrolatu nahi ditugun aldagaiak ere. Bestalde, guk kontrolatu nahi ditugun aldagaiez gain, guk kontrola ditzakegun aldagaiak ere aztertu behar ditugu. Aldagai horien bitartez, guk kontrolatu nahi ditugun aldagaiak aldatu ahal izango ditugu. 'Sarrera-aldagai' horiei ekintza-aldagai edo kontrol-aldagai deritze. Horrez gain, perturbazioak ditugu, sistemaren inguruak sistemari berari eragiten dizkionak. Perturbazioak, ekintza- edo kontrol-aldagaiak bezala, 'sarrera-aldagaiak' dira, baina aldagai horiek normalean ezin dira neurtu era zuzen eta zehatz baten bitartez. Bestalde, ezin ditugu perturbazioak aldatu. Guk erraz aldatu ahal izango bagenitu, ekintza- edo kontrol-aldagaitzat hartuko genituzke. Aldagaiak era egoki batean identifikatu eta gero, ongi aztertu behar ditugu sistemaren dinamika finkatzen duten fenomeno garrantzitsuenen nondik norakoak, hots, sistemaren lege fisikoak. Hausnarketa edo azterketa horren bidez, sistemaren irudia izango den eredu matematikoa finkatuko dugu. Hortaz, ongi bereizi behar ditugu sistema eta guk kalkulatutako eredu matematikoa. Gogoratu, sistema guretzat atal fisikoa dela, eta eredu matematikoa guk sistema horretaz dugun irudi ideal bat besterik ez dela.
Sarrera 11
Sistemaren eredu matematikoa kalkulatu eta gero, eredu horretan oinarritutako kontrola eraikiko dugu. Kontrolak bi atal nagusi ditu: batetik, kontrolaren atal fisikoa, hots, hardwarea (fr.: realisation); eta, bestetik, kontrolaren programak eta algoritmoak, hots, softwarea (fr. logicielle). Irudian ikus daitekeenez, kontrolak kontrolatu nahi ditugun aldagaiak neurtzen ditu, eta, beste aldagai laguntzaile batzuen bitartez, neurketa bektore bat osatzen du. Normalean, kontrolatu nahi diren aldagaiak neurtzen dira zuzenean, baina sarritan hori ez da posible izaten; horregatik, aldagai laguntzaileen bidez kontrolatu nahi ditugun aldagaiak zenbatetsi eta hobeto kontrola dezakegu. Bestetik, neurketa horiek kontrolaren konputagailuan sartzen dira analogikotik digitalerako bihurgailu batzuen bitartez (in.: A/D converters). Konputagailua, normalean, zirkuitu elektroniko bat da. Zirkuitu elektroniko horrek mikroprozesadore bat du; mikroprozesadore horrek algoritmo bat exekutatzen du sarrerako datuekin. Programa horrek denbora-eten bat du (in.: time interruption), eta eten hori exekutatzen den bakoitzean, 5 kontrol-algoritmoa exekutatzen du mikroprozesadoreak. Eten horrek sistemaren datuak neurtzen ditu eta kontrol-aldagaien balioak kalkulatzen ditu. Etenaren bukaeran, kontrol-aldagaiak sistemari bidaltzen dizkio D/A bihurgailuen (in.: D/A converters) bitartez. D/A bihurgailuak ez du behar adina potentzia sistemaren gain, beraz, mikroprozesadore baten D/A

12
bihurgailuen ostean eragingailu batzuk ditugu (in.: actuators). Eragingailu horiek serbozilindroak izan daitezke; hau da, motorren potentzia elektronikoaren bihurgailu izan daitezke (in.: AC/DC, DC/DC, DC/AC converters, motor drivers, cycloconverters, linear motors drivers). Potentzia txikia behar duten sarrera elektrikoak dituzte eragingailuek, eta oso tentsio txikien bitartez kontrola daitezke. Normalean, tentsio horiek ±5 voltekoak izaten dira. Eragingailuek, berriz, potentzia handiko irteerak dituzte, eta sistemaren kontrol-aldagaiak modu egokian alda ditzakete. Beste alde garrantzitsu bat da jakitea neurgailuak, kontroleko konputagailutik urrun egon arren, kontrolaren barruan hartu behar ditugula. Neurgailuetan ere esparru zabala dugu. Neurgailu mota asko ditugu, eta era askotako teknologia dugu gaur egun. Sentsoreek (in.: Sensor & captors), normalean, tentsioan ematen dute beren balioa, eta A/D neurgailuen bitartez neurtzen ditugu.
Konputagailu bitartez kontrolaturiko sistema batek nola lan egiten duen ulertu eta gero, hau aipatu behar dugu: nahiz eta gure kontrol-algoritmoak gure eredu matematikoaren arabera kontrol-aldagaiak kalkulatzen dituen, kontrolak beti sistemarekin lan egin behar du. Horrek arazo asko ekar ditzake, eredu horrek ez baitu behar bezala irudikatzen sistema. Bestalde, kontuan izan behar dugu kontsigna-aldagaiak oso garratzi handikoak direla. Kontsigna-aldagaiek ematen dizkigute sisteman kontrolaturiko aldagaiek izan beharko lituzketen balioak; beraz, kontrolaren kanpoaldetik datoz. Sisteman kontrolaturiko aldagaiek kontsignei jarraitu beharko liekete. Beraz, kontrolaren benetako eginkizuna da sistematik kontrolatu nahi ditugun aldagaiak kontsignaren balio berberak izan ditzatela bermatzea. Horretarako nahitaezkoa da sistemaren egoera ezagutzeko neurketa batzuk egitea. Horrez gain, sistemari nolabait eragin egin behar zaio. Sistemaren gain eragiteko, kontrol-aldagaiak ditugu. Aldagai horien bitartez, sistemak kontsignei jarraitu

Sarrera 13
diezaiela egin behar dugu. Lan egiteko teknika horri berrelikadura deritzo (in.: feedback). Bestetik, kontsignak sortzeko begirale bat behar dugu (in.: supervisor); normalean, begiraleak kontsignak sortzeaz gain beste eginkizun batzuk ere baditu. Eginkizun horien artean dago sistemaren lan-egoera (adibidez, alarma-egoera, produkzio-egoera, etab.). Horrelako begiraleak dira, esate baterako, automata programagarriak (in.: PLC) edota zenbakizko kontrolak (in.: CNC). Kontsignaren kalkulua eta sistemaren kontrola konputagailu berberean egon daitezke. Gaur egun, horrelakoak egiteko, ordenagailu industrialak erabiltzen dira, eta aldagai asko kontrolatu behar ez direnerako erabaki merkeena dira. Irudian ikus daiteke nola lan egiten duen kontrol digital batek. Erlojuak (in.: clock) begiralea, konputagailua, eta A/D eta D/A bihurgailuak sinkronizatzen ditu. Beraz, erlojuko denbora-tarte finkoetan,

14
begiraleak kontsignak ematen dizkio konputagailuari. Aldi berean, A/D bihurgailuak sisteman kontrolaturiko aldagaiak neurtzen ditu, eta konputagailuari ematen dizkio neurtutako lagin guztiak. Ondoren, konputagailuak datu horiek guztiak irakurri eta kontrol-aldagaiak kalkulatzen ditu algoritmo baten arabera. Konputagailuak balio horiek D/A bihurgailura bidaltzen dizkio, eta bihurgailuak, erlojuaren onespena duenez, balioa ateratzen du eta balio horiek mantentzen ditu erlojuaren hurrengo zikloa hasi arte. Irteera bat baino gehiago baldin badira, bihurgailu bat baino gehiago behar ditugu, edota irteera anitzeko D/A bihurgailuak. Eragingailuek, normalean, ez dute erlojuaren beharrik, baina zenbait kasutan beharrezkoa dute erlojuaren seinalea izatea eta konputagailuarekin sinkronizaturik egotea. Horren adibide ditugu potentzia elektronikoaren eragingailuak. Neurgailuetan, berriz, ez dugu A/D bihurgailuaren beharrik, neurgailuek zuzenean balio digitala ematen dutelako. Adibidez, abiadura-neurgailuek (in.: encoder) zuzenean balio digitalak ematen dituzte. Beraz, nolabait, A/D bihurgailu bat aurrezten dugu. Bestalde, argi utzi behar dugu eragingailuek eta neurgailuek berezko dinamikak dituztela, eta haien dinamika kontuan eduki behar dugula kontrolaren algoritmoa egiteko. Horrez gain, eragingailuek nahitaez potentzia handia izan behar dute sistemaren gain eragiteko.
Hona hemen konputagailuaren kontrola nola exekutatzen den ulertzeko irudi bat. Hor ikus daitezke mikroprozesadorearen pausoak, erlojuaren bitartez eten bat jasotzen duenean (in.: time interruption). Normalean, erloju hori konputagailuarena izaten da. Lehenik, kontsignak eta A/D bihurgailuak irakurtzen ditu eta, ondoren, kontrol-algoritmoa exekutatzen du. Algoritmoak kontrol-aldagaiak kalkulatzen ditu eta D/A bihurgailuetara bidaltzen ditu balio horiek. Etena exekutatu ondoren, beste ataza (in.: task) batzuk egiten jarraitzen du, harik eta erlojuak hurrengo etena sortu arte. Erlojuak berriz etena sortutakoan, mikroprozesadoreak etena exekutatzen du. Berriro A/D irakurri eta berriro kalkulatzen ditu kontrol-aldagaiak D/A bihurgailuetatik ateratzeko. Ziklo hori behin eta berriz exekutatzen da.

Sarrera 15
Ikus daitekeenez, automatikak ingeniaritzako esparru askori eragiten die. Batetik, mekanika eta, bestetik, elektronika eta elektrizitatea. Informatikak ere zeresan handia du automatikan, automatika digitalean batez ere. Automatikan zientzietako beste arlo garrantzitsu batzuk ere parte hartzen dute, hala nola matematikak, sistema dinamikoen teorian, eta fisikak, sistemen eredu matematikoak kalkulatzean.
1.1 ariketa
Demagun dutxan zaudela eta ura tenperatura zehatz batean izan nahi duzula. Irudikatu, marrazki baten bidez, nahi dugun uraren tenperatura eskuz kontrolatzeko parte hartzen duten atalen eskema edo bloke-diagrama. Zehaztu eskemako atalen arteko aldagaiak.

16
1.2 ariketa
Demagun etxera itzultzean etxeko atea ireki behar dugula. Horretarako, etxeko giltza ateko sarrailan sartu behar dugu. Irudikatu giltzaren posizioa kontrolatzeko parte hartzen duten atalen eskema edo bloke-diagrama. Zehaztu eskemako atalen arteko aldagaiak.
1.3 ariketa
Demagun gurdi bat gidatzen ari garela. Horretarako, gurdia daramaten zaldiak gidatu behar ditugu. Irudikatu gurdiaren posizioa kontrolatzeko parte hartzen duten atalen eskema edo bloke-diagrama. Zehaztu eskemako atalen arteko aldagaiak.
1.4 ariketa
Demagun zirkuitu-anplifikadore bat dugula. Ondoko irudian agertzen den bezala, zirkuitu hori anplifikadore operazional baten bitartez egina dago (in.: Operational Amplifiers). Aztertu zirkuituaren berrelikadura; eta aztertu, orobat, zirkuituaren dinamika, zirkuituaren erresistentziak ezagunak direla suposatuz. Zirkuitua deskribatzen duen ekuazioaren bloke-diagrama.

Sarrera 17
Hau dugu:
us = –Ku
ue = R1i + R2i + us
ue = R1i + u
u eta i desagerrarazten baditugu:
1
211
2
KRRR
1
1RR
++
⋅−=e
s
uu
+
+−= ses uuKu
2
1
21
1
1
2
RR
RRR
RR
ekuazioak deskribatzen duen funtzioaren
eskema ondorengo irudian agertzen da:
k > 1 denean:
1
2
RR
−=e
s
uu
1.2 DENBORA JARRAITUKO SISTEMA: OINARRIZKO TEORIA
Hurrengo orrialdeetan oinarrizko automatika aztertuko dugu. Lehenik eta behin, sistema jarraitu eta linealen azterketarako hain garrantzitsua den tresna matematiko bat azalduko dugu: Laplace-ren transformatua, hain zuzen ere. Tresna horrek

18
sistema jarraituak eta linealak oso erraz ebazten ditu. Egia esanda, sistema horiei beste muga batzuk ere jartzen dizkiegu; adibidez, ekuazio diferentzialen koefizienteak konstanteak izan behar dutela denboran zehar edo sistemak kausalak izan behar dutela. Hau da, horrelako sistemek ezin dutela sarreren eraginei esker beren egoera aldatu sarrerako aldaketak eman baino lehen.
Laplaceren transformatuari esker, sistema jarraituen eta linealen zenbait propietate garrantzitsu ere azaldu genitzake. Bestalde, tresna matematiko horrek dituen gauza erabilgarrienetarikoak hauexek dira:
1. Sistema lineal eta jarraituen dinamika polinomioen azterketara mugatu daitekeela.
2. Geroago ikusiko dugun transferentzia-funtzioei esker, sistemaren abstrakzio maila lortzen dugula, hau da, ez dugula sistemaren barne-muina ezagutu beharrik kontroladorea edo konpentsadorea kalkulatu ahal izateko.
1.2.1 Laplaceren transformatua
Laplaceren transformatua funtzio bati aplikatzen zaio, eta funtzio horretan, eskuarki, aldagai askea (aldagai aske horrek beti du izaera erreala) denbora izan ohi da. Bestalde, funtzioa gehienetan funtzio erreal bat izaten da. Dena den, funtzioak ez du zertan funtzio erreala izan, konplexua ere izan daiteke. Berez, lortutako transformatua F(s) funtzio konplexu gisa definitzen da. Transformatuan agertzen den s aldagaia konplexua da eta aldagai berri hori F(s)ren aldagai askea izango da.
Definizioa: Demagun funtzio hau dugula: f : ℜ ⇒ ℜ. Izatez, funtzio horrek denbora izango du aldagai asketzat, eta honela izendatuko dugu: f(t).
Laplaceren transformatua honela definituko dugu:
∫α+
−⋅=0
)()(F dtetfs st s ∈ C
Laplaceren transformatuak hainbat ezaugarri matematiko ditu:
1. Linealtasuna. Funtzioen konbinazio lineal baten transformatua funtzio bakoitzaren transformatuen konbinazio lineala da:
L(α1f1 + α2f2) = α2L(f1) + α2L(f2)
L(f(t)) da f(t) aldagaiaren Laplaceren transformatua.

Sarrera 19
Linealtasun-ezaugarri hori integralaren linealtasun-ezaugarriari esker egiaztatzen dugu:
( ) ( )[ ] ( ) ( )∫∫∫α+
−α+
−−α+
⋅α+⋅α=⋅α+α0
220
110
2211 dtetfdtetfdtetftf ststst
2. Deribatuaren transformatua. Ezaugarri honek ere oso garrantzi handia du, ekuazio diferentzial linealetarako ezaugarri erabilgarria delako. Berez, ezaugarri honek hau dio: aldagai baten deribatuaren transformatua lehen mailako polinomio bihurtzen du.
( ) ( )+−⋅=
0FL fssdtdf
Egiaztapena honelakoa da; zatikako integrazioaren irizpidea erabiliz, berdintza honetara iritsiko gara:
[ ] [ ] [ ] =⋅⋅⋅+=⋅−⋅=⋅ ∫∫∫+∞
−∞+−+∞
∞+−+∞
00
00
0
)()(.)( dtetfstfeduvvudtetfdtd ststst
)()0()(F +∞⋅+−= ∞−+ fefss s
)0()(FL +−=
fssdtdf Baldin eta s = a + ib; a > 0
u = e–st ⇔ du = –s · e–st · dt
[ ] )()( tfvdttfdtddv =⇔⋅=
3. n-garren deribatuaren transformatua. Aurreko legea era errepikakorrean erabilita egiazta daiteke ezaugarri matematiko hau. Hau da, n-garren deribatuari transformatua egokituta lortuko genuke sFn–1 – 1−nf (0). Baina, Fn–1 kalkulatu ahal izateko, lehen deribatuaren legea erabili beharko genuke. Beraz, aurreko ezaugarria behin eta berriz erabilita honera iritsiko ginateke:
( )⇒−
=
+−−
−
0LL 11
1n
n
n
n
nf
dtfds
dtfd
( ) ( )+−+−−
−
−
−
=
⇒ 00LL 12
2
2nn
n
n
n
nff
dtfdss
dtfd

20
( )+−−
−
−
−
−
=
0LL 2
2
2
1
1n
n
n
n
nf
dtfds
dtfd
( ) ( )+−+−−
−
−−
=
00LL 12
2
22 nn
n
n
n
nfsf
dtfds
dtfd
deribatuaren ezaugarria n aldiz errepikatuz, hau lortuko dugu:
( ) ( ) ( ) ( ) ( )0...000FL 13221 fsfsfsfssdt
fd nnnnnn
⋅−−⋅−⋅−−⋅=
−−−−
4. Integralaren transformatua. Ezaugarri hau integralaren transformatuan datza. Ezaugarri hau honela egiazta daiteke: denborarekiko integratzean, aldagai laguntzaile bat erabil dezakegu. Guk τ erabiliko dugu. Integrala beti era mugatuan adieraziko dugu, baina hasierako balio bat egokituta. Hala, integral mugatuetarako zein mugagabeetarako aplikatu ahal izango dugu. Horrenbestez, honela adieraziko dugu integrala:
⇒⋅= ∫ )()( dttytIy Integral mugagabea
i
ttt
k+τ⋅τ=τ⋅τ+τ⋅τ=τ⋅τ ∫∫∫∫∞−∞− 0
0
0
d)y(d)y(d)y(d)y(
Iy(0), ki: integralaren hasierako balioa
Integral mugatuaren lehen atalaren transformatua honelakoa da:
τ
⋅τ=τ
⋅⋅τ=⋅⋅
τ⋅τ=
τ⋅τ ∫ ∫∫ ∫∫ ∫∫
∞ ∞
τ
−∞ ∞
τ
−−∞
ddteyddteydtedydy stststtt
000 00
)()()()(L
stydey
sd
se
seydy s
sst ))((L)(1)()(L000
=τ⋅τ=τ⋅
−τ=
τ⋅τ ∫∫∫
∞τ−
∞ ∞−τ−
Izate-eremua: s = a + ib; e–s∞ = e–(a+ib)∞ < e–a∞ ∈ C ⇒ a > 0
Integral mugatuaren bigarren atala konstante bat denez, bere transformatua oso erraz kalkula daiteke:

Sarrera 21
s
dy
ske
skdtek isist
i
∫∫ ∞−∞−∞
−
τ⋅τ
==−=⋅⋅
0
0
)(
)1(
Izate-eremua: e–s∞ ∈ C ⇒ e–s∞ = e–(a+ib)∞ ≤ e–a∞ ⇒ a > 0
( )( ) ( )sk
ssdttf i+=⋅∫
FL
ki: integralaren hasierako balioa
Izate-eremua: s = a + ib ∈ C : a > 0, hots, planu konplexuko eskuinaldea
5. Hasierako balioaren teorema. Teorema hau garrantzi handiko ezaugarria da, sistema linealek denboran duten erantzuna kalkulatu ordez, hasierako balioa zuzenean kalkulatzeko erabil litekeelako.
)0()(F0
fssdtedtdf st −=⋅⋅
∫∞
−
∫∞
− ⋅⋅=0
)()(F dtetfs st
[ ] ,0)0()(Flimlim0
=−⋅=⋅⋅
∞→
∞−
∞→ ∫ fssdtedtdf
sst
s baldin eta 0lim =
∞→ sts edtdf
( )( )0
lim ( ) lim Fst
f t s s+ →∞→
= ⋅
6. Azken limitearen teorema. Ezaugarri honek ere garrantzi handia du. Sistema linealetan, denborak infiniturantz jotzen duenean, sistemak hartzen duen balioa kalkulatzeko aukera ematen digu, sistemaren ekuazio diferentziala ebatzi gabe. Esanak esan, ezaugarri hau egiaztatuko dugu:
0
L F( ) (0 )stdf df e dt s s fdt dt
∞− + = ⋅ ⋅ = ⋅ −
∫
( ))0()(FlimLlim00
+
→→−⋅=
fssdtdf
ss

22
( ) ( ))(lim)(limlim0
000
tytydtdtdfdte
dtdf
ttst
s →∞→
∞∞−
→−=⋅=⋅⋅ ∫∫
( ) )0()(lim))0()(F(lim0
+
∞→
+
→−=− ftyfss
ts
( ) ))((lim)(Flim0
tyssts ∞→→
=⋅
Dena den, ezaugarri hori egiaztatzean, aldez aurretik suposatu dugu limitearen balioa erreala dela. Baina beti ez da hori gertatzen; adibidez, sistemak infiniturantz jotzen duenean, teorema honek ez du zertan balio izan. Horregatik, kontu handia izan behar dugu teorema hau erabiltzean. Horrenbestez, sistema linealen analisia egiten dugunean emango ditugu irizpide egokiak teorema hau egoki erabili ahal izateko.
7. Funtzio esponentzial batekiko biderketaren transformatuaren ezaugarria. Ezaugarri honek duen erabilgarritasuna zertan datzan ulertu ahal izateko, sistema linealen analisira jo behar dugu. Aurrerapen gisa esan daiteke funtzio esponentzialak sarritan agertzen direla sistema linealak ebazteko orduan. Ezaugarri honen garrantziaz jabetu ostean, bere egiaztapena aurkezten dugu:
∫ ∫+∞ +∞
+−−− ⋅⋅=⋅⋅⋅0 0
)()()( dtetfdtetfe tasstat
∫∞
− ⋅⋅=0
)()(F dtetfs st
∫+∞
−− +=⋅⋅⋅0
)(F)( asdtetfe stat
∀ a ∈ ℜ, F(s) izate-eremua s = u + iv : u > 0 bada, F(s+a)ren izate-eremua s = u + iv : u · a > 0
8. Transformatuaren s aldagaiarekiko deribatuaren ezaugarria. Ezaugarri honek badu garrantzia, sistemen erantzuna kalkulatu ahal izateko; adibidez, tn moduko denboraren mendeko sarrerentzako. Egiaztapena lehen deribatua-rentzat egingo dugu, eta, gero, behin eta berriz errepikatuta, lege orokorra ere asma daiteke oso erraz.

Sarrera 23
[ ]∫∫∫∞
−∞
−∞
− ⋅⋅=
⋅⋅=⇒=⋅⋅
000
)()()(F)(F)( dtetfdsddtetf
dsd
dssdsdtetf ststst
dssddttfetdttfet
dssd stst )(F)()()(F
0 0
−=⋅⋅⋅⇒⋅⋅⋅−= ∫ ∫∞ ∞
−−
∫∞
− ⋅⋅⋅=0
22
2)()(F dtetft
dssd st
n
nnstnst
dssddtetftdtetft
dssd )(F)1()()()(F
00
33
3−=⋅⋅⋅⇒⋅⋅⋅=− ∫∫
∞−
∞−
Indukzio-irizpidearen bitartez egiaztatuko dugu. Lehenik n-garren ataletik hasiko gara. Atal hori deribatzen badugu, behean dugun adierazpen matematikoa lortuko dugu s aldagaiarekiko. Bigarren urratsa n-garren atalari berriz aplikatuta, n+1-garren elementua aurkituko dugu berriro ere. n+1 atala legearekin kalkulatutakoaren baliokidea bada, esango dugu legea frogatuta dagoela.
∫∫∞
−+−∞
⋅⋅⋅=
⋅⋅−
0
1
0
)()( dtetftdtetftdsd stnstn : n + 1-garren elementua deribatuz
lortuta
=
−−=⋅−=⋅⋅⋅
+
++
∞−+∫ n
nn
n
nnstn
dssd
dsd
dssddtetft )(F)1()(F)1()(
1
11
0
1
⋅⋅−= −
∞
∫ dtetftdsd stn )(
0
: n + 1-garren elementua legeari aplikatuz berdinak
direnez, legea frogatutzat joko dugu.
9. Atzerapenaren transformatuaren ezaugarria. Ezaugarri matematiko hau ere oso erabilgarria da, atzerapenak sarritan agertzen direlako naturan. Ezaugarri honetarako, besteekin bezala, transformatuaren definizioa erabiliko dugu. f(t) funtzio baten transformatua F(s) bada eta f(t) t0 denbora atzeratzen badugu, 0 eta t0 denbora-tartean f(t – t0) funtzioak zero balioa hartzen du.
=⋅⋅−=⋅⋅−⇒=⋅⋅ −∞ ∞
−∞
− ∫ ∫∫ dtettfdtettfsdtetf st
t
stst
000
0 0
)()()(F)(

24
dueuf tus ⋅⋅= ∫∞
+−
0
)( 0)(
u = t – t0; du = dt
)(F)()()( 000
0000 sedueufedueeufdtettf stsuststsust ⋅=⋅⋅=⋅⋅⋅=⋅⋅− −
∞−−
∞−−
∞− ∫∫∫
10. Denbora-eskalaren aldaketaren transformatua. Ezaugarri honek ere garrantzia du bi sistemen arteko dinamika oso abiadura ezberdinean gertatzen denean. Hona hemen ezaugarriaren froga:
( ) ( ) ∫∫∞
−∞
− ⋅⋅=⋅⋅⋅=⋅⋅=⇒=0
).(
0
)(F)()/()/(L)(F)(L saadueufadteatfatfstf usast
dta
duaatu ⋅=⇒ℜ∈∀=1 ;/
L(f(t/a)) = a · F(a · s)
11. Laplaceren alderantzizko transformatua. Denboraren funtzioa aldagai konplexu baten mendeko funtzio bihurtu eta gero, eta ekuazio diferentziala kalkulatu ostean, alderantzizko eragiketa egin nahiko dugu emaitza aurkitu ahal izateko. Beraz, hori egiteko, alderantzizko transformatua definituko dugu:
( ) )()(F21)(FL 1 tfdses
js
jc
jc
st ≡⋅⋅π
= ∫∞+
∞−
−
∀ c ∈ ℜ : V c ∈ F(s)-ren izate-eremua da
∫∞
− ⋅⋅=0
)())((L dtetftf st
⋅
τ⋅⋅τ
π= ∫ ∫
∞ +
−
τ−
∞→dsedef
jtf st
jwc
jwc
sw
0
)(lim21)(
s = c + jγ : c = kte ⇒ ds = jdγ

Sarrera 25
γ⋅
τ⋅⋅τ
π= γ+
∞
−
τγ+−
∞→ ∫ ∫ jdedefj
tf tjcjw
jw
jcw
)(
0
)()(lim21)(
γ⋅
τ⋅⋅τ
π= γ+
∞
−
τγ+−
∞→ ∫ ∫ dedeftf tjcjw
jw
jcw
)(
0
)()(lim21)(
γ⋅
τ⋅⋅τ
π= γ+
∞
−
τγ+−
∞→ ∫ ∫ dedeftf tjcjw
jw
jcw
)(
0
)()(lim21)(
( )
γ
τ⋅⋅τ
π= ∫ ∫
∞
−
τ−γ+
∞→ddeftf
jw
jw
tjcw
0
)()(lim21)(
( )
τ
γ⋅⋅τ
π= ∫ ∫
−
∞τ−γ+
∞→ddeftf
jw
jw
tjcw
0
)()(lim21)(
γ⋅
τ⋅⋅τ
π= ∫ ∫
−
∞τ−γ+
∞→ddeftf
jw
jw
tjcw
0
))(()(lim21)(
γ⋅
τ⋅⋅⋅τ
π= ∫ ∫
−
∞γτ−τ−γ+
∞→ddeefetf
jw
jw
jctjcw
0
)( )(lim21)(
Fourier-en integralaren arabera, barneko integrala eta 2π konstantearen balioa f(τ) da. Beraz, honela garatu dezakegu:
τ⋅⋅τ⋅= τ−
−∞→ ∫ defetf c
jw
jw
ctw
)(lim)(
τ⋅⋅⋅= −
−
γ
∞→ ∫ detfetf ctjw
jw
tjw
)(lim)(
1.2.2 Sistema linealen teoria
Atal honetan, denboran zehar era jarraituan lan egiten duten sistemak aztertuko ditugu. Beraz, gure sistemaren definizioei muga edo ezaugarri batzuk finkatuko dizkiegu:

26
1. Sistemak denboran zehar duen bilakaera jarraitua da, hots, sistemaren aldagai guztiak denborarekiko partzialki jarraituak izango dira. Beraz, sistema diskretuak definizio honetatik kanpo geratzen dira.
2. Sistema dinamikoak aztertuko ditugu. Sistemak estatikoak edo dinamikoak izan daitezke. Sistema estatiko baten aldiune jakin baterako irteera aldiune horretako balioaren araberakoa da. Beraz, horrelako sistemek ez dute inolako mendekotasunik iraganarekiko edo geroarekiko. Sistema dinamikoetan, berriz, printzipioz, aldiuneko irteera aldiune horren aurretik eta haren ostean sarrerek duten balioen araberakoa da. Naturan, sarritan, sistema dinamikoak gertatzen dira, eta horregatik aztertuko ditugu sistema dinamikoak. Sistema estatiko baten definizio gisa hau har dezakegu: erresistentzia elektriko baten balioa bakarrik tenperaturaren araberakoa da. Beraz, aldiune baten erresistentziak duen balioa aldiune horretan duen tenperaturaren araberakoa da. Honelako definizio matematikoa dugu sistema estatikoentzat:
Y(t) = ℑ(X(t))
Y(t): t aldiunean irteerak duen balioa X(t): t aldiunean sarrerak duen balioa
Hau izango litzake sistema dinamiko baten adibide bat: gorputz baten aldiuneko tenperatura ez dago aldiune horretako bero-emariaren mende bakarrik; aldiune horren aurretik emandako beroa emariaren araberakoa ere. Beraz, definizio matematikoetan honelakoaz baliatuko gara:
{Y(t)} = ℑ{X(t)}
{Y(t)}: irteerak t-n hartzen dituen balio guztien multzoa {X(t)}: sarrerak t-n hartzen dituen balio guztien multzoa
3. Sistema dinamiko baten irteeraren balioak t aldiunerako, dena den, t aldiune horren osteko sarreren araberakoak izan daitezke. Horrelako sistemei ez-kausal deritzegu, irteerak sarrerak eragin baino lehen erantzuten duelako. Naturan ez dago horrelako sistemarik. Dena den, gerta daiteke sisteman sartu baino lehen sistemaren sarrera jakitea. Adibide garbiena honako hau da: discman askok aurrerapen handiarekin irakurtzen dute jo behar duen soinua. Beraz, soinua jo baino lehen sistema presta daiteke; horrenbestez, alde horretatik, discman baten soinu-sistemak sistema ez-kausal baten antzera jokatuko luke.
4. Sistemen linealtasuna da finkatuko dugun beste ezaugarri garrantzitsu bat. Sistema linealak garrantzi handiko ezaugarri bat dute: sarrera bakoitzari