Optimización Del Ajuste de Estabilizadores de Potencia
128
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA “ANTONIO JOSÉ DE SUCRE” VICE-RECTORADO PUERTO ORDAZ DIRECCIÓN DE INVESTIGACIÓN Y POSTGRADO UNIDAD REGIONAL DE POSTGRADO MAESTRÍA EN INGENIERÍA ELÉCTRICA OPTIMIZACIÓN DEL AJUSTE DE ESTABILIZADORES DE POTENCIA EN EQUIVALENTES DINÁMICOS DE SISTEMA MULTIMÁQUINA ING. TULIO ERNESTO HERNÁNDEZ RAMÍREZ PUERTO ORDAZ, ABRIL 2011
-
Upload
tulio-hernandez -
Category
Documents
-
view
49 -
download
0
Transcript of Optimización Del Ajuste de Estabilizadores de Potencia
-
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITCNICA ANTONIO JOS DE SUCRE
VICE-RECTORADO PUERTO ORDAZ DIRECCIN DE INVESTIGACIN Y POSTGRADO
UNIDAD REGIONAL DE POSTGRADO MAESTRA EN INGENIERA ELCTRICA
OPTIMIZACIN DEL AJUSTE DE ESTABILIZADORES DE POTENCIA EN EQUIVALENTES DINMICOS DE SISTEMA MULTIMQUINA
ING. TULIO ERNESTO HERNNDEZ RAMREZ
PUERTO ORDAZ, ABRIL 2011
-
ii
OPTIMIZACIN DEL AJUSTE DE ESTABILIZADORES DE POTENCIA EN EQUIVALENTES DINMICOS DE SISTEMA MULTIMQUINA
-
iii
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITCNICA ANTONIO JOS DE SUCRE
VICE-RECTORADO PUERTO ORDAZ DIRECCIN DE INVESTIGACIN Y POSTGRADO
UNIDAD REGIONAL DE POSTGRADO MAESTRA EN INGENIERA ELCTRICA
OPTIMIZACIN DEL AJUSTE DE ESTABILIZADORES DE POTENCIA EN EQUIVALENTES DINMICOS DE SISTEMA MULTIMQUINA
ING. TULIO ERNESTO HERNNDEZ RAMREZ Trabajo de Grado presentado ante la Direccin de Investigacin y Postgrado del Vicerrectorado Puerto Ordaz como parte de los requisitos para optar al Ttulo Acadmico de Magster Scientiarum en Ingeniera Elctrica.
TUTOR: ING. ALEXIS DAZ, M. Sc.
PUERTO ORDAZ, ABRIL 2011
-
iv
Hernndez Ramrez, Tulio E. Optimizacin del Ajuste de Estabilizadores de Potencia en Equivalentes Dinmicos de Sistema Multimquina. (2011). 128 Pg. Trabajo de Grado Universidad Nacional Experimental Politcnica "Antonio Jos de Sucre". Vicerrectorado Puerto Ordaz. Direccin de Investigacin y Postgrado. Maestra en Ingeniera Elctrica. Tutor: Ing. Alexis Daz, M. Sc. Bibliografa Pg. 93 1) Optimizacin. 2) Estabilidad. 3) Sistema de Excitacin. 4) Estabilizador de Potencia. 4) Sistemas Multimquina. 5) Equivalentes Dinmicos.
-
v
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITCNICA ANTONIO JOS DE SUCRE
VICE-RECTORADO PUERTO ORDAZ DIRECCIN DE INVESTIGACIN Y POSTGRADO
UNIDAD REGIONAL DE POSTGRADO MAESTRA EN INGENIERA ELCTRICA
ACTA DE EVALUACIN
En mi carcter de tutor del Trabajo de Grado presentado por el Ing. Tulio Ernesto Hernndez Ramrez, portador de cdula de identidad nmero: 11.496.160, para optar al grado de acadmico de: Magster Scientiarum en Ingeniera Elctrica. Titulado: Optimizacin del Ajuste de Estabilizadores de Potencia en Equivalentes Dinmicos de Sistema Multimquina, considero que dicho trabajo rene los requerimientos y mritos suficientes para ser sometido a la evaluacin por parte del jurado examinador.
En la ciudad de Puerto Ordaz, a los _______ das del mes de Abril de Dos mil Once.
______________________________
Ing. Alexis Daz, M.Sc. C.I. 8.181.310
-
vi
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITCNICA ANTONIO JOS DE SUCRE
VICE-RECTORADO PUERTO ORDAZ DIRECCIN DE INVESTIGACIN Y POSTGRADO
UNIDAD REGIONAL DE POSTGRADO MAESTRA EN INGENIERA ELCTRICA
ACTA DE APROBACIN
Quienes suscriben, miembros del Jurado Evaluador designados por la Comisin de Estudios de Postgrado de la Direccin de Investigacin y Postgrado de la Universidad Nacional Experimental Politcnica Antonio Jos De Sucre, Vice-Rectorado Puerto Ordaz, para examinar el Trabajo de Grado presentado por el: Ing. Tulio Ernesto Hernndez Ramrez, portador de cdula de identidad nmero: 11.496.160. Titulado: Optimizacin del Ajuste de Estabilizadores de Potencia en Equivalentes Dinmicos de Sistema Multimquina, el cual es presentado para optar al grado de acadmico de Magster Scientiarum en Ingeniera Elctrica, consideramos que dicho trabajo cumple con los requisitos exigidos para tal efecto y por la tanto lo declaramos:.
En la ciudad de Puerto Ordaz, a los _____ das del mes de Abril de Dos Mil Once.
_______________________
Presidente
_______________________
Miembro Principal
_______________________
Miembro Principal
-
vii
DEDICATORIA
A Dios, A mis Padres Nancy y Tulio,
A mi esposa Mara Herminia, A mis hijas Tina y Fabi,
A mis hermanos Carlos, Linda y Karim.
-
viii
AGRADECIMIENTOS
Agradezco a Dios por brindarme esta oportunidad y a muchas personas que colaboraron en el desarrollo de este trabajo, que con su respaldo me incentivaron a seguir adelante, no obstante es un honor citar aquellos que con su aprecio formaron parte importante de esta meta.
A Mara Herminia, por su acompaamiento y comprensin.
Al Profesor Alexis Daz, por sus consejos y enseanzas, reflejando la calidad de ser humano y docente de manera integral.
Al Profesor Sady Zurita, Honor al Merito por su constancia y orientacin en el desarrollo personal y profesional.
A los Profesores Luis Prez y Hussein Khdor, por su sabidura y enseanza.
A mis amigos, Juan Francisco Gmez, Luis Ocque, Paulo De Oliveira y Miguel Russian por compartir la lucha y esfuerzo para el desarrollo del rea elctrica.
Al personal administrativo de la Unidad Regional de Postgrado de la UNEXPO, por su colaboracin en especial a la Ing. Edita Lrez.
A mis compaeros de la Maestra, Flix Rivas, Carlos Hernndez, Sergio Pereira, Armando Sotillo, Jos Caraballo, Raider Coa, Rhociel Hernndez, y otros ms disculpen si no estn en la lista, pero a todos los que logramos vivir excelentes momentos.
A mis tesistas durante los aos 2006 al 2008, Leofrancis Farro, Carlos Vargas, Ramn Hernndez, ngel Jimnez y Gustavo Daz, por su amistad y disposicin.
Al personal de la empresa EDELCA, por todo su apoyo y colaboracin.
-
ix
Hernndez Ramrez, Tulio Ernesto (2011). Optimizacin del Ajuste de Estabilizadores de Potencia en Equivalentes Dinmicos de Sistema Multimquina. Trabajo de Grado. Universidad Nacional Experimental Politcnica Antonio Jos de Sucre. Vice-Rectorado Puerto Ordaz. Direccin de Investigacin y Postgrado. Maestra en Ingeniera Elctrica. Tutor: Ing. Alexis Daz, M.Sc.
RESUMEN
La evolucin de la sociedad demanda continuamente condiciones de operacin en nuestro sistema elctrico que deben ser atendidas de forma segura y confiable, este proceso origina una serie de evaluaciones, planificaciones, proyectos que contemplan como parte del alcance estudios de estabilidad ante eventos tales como las oscilaciones de potencia, que en el caso de no ser amortiguadas pueden ocasionar la prdida de sincronismo de los generadores, poniendo en riesgo la confiabilidad y calidad del servicio. En consecuencia, cada vez son ms complejos los requerimientos de control asociados a las unidades de generacin para solventar problemas de estabilidad inherentes a los grandes sistemas. As mismo, se han realizado aportes importantes con la incorporacin y el uso de nuevas tecnologas en controladores de potencia. En el presente trabajo de grado, se desarroll una metodologa para determinar el ajuste ptimo de los estabilizadores de potencia de un sistema multimquina, basada en una tcnica de optimizacin heurstica para mitigar las oscilaciones de potencia en el sistema para diversas condiciones de operacin factibles, basada en el algoritmo de optimizacin de enjambre de partculas, donde cada partcula est representada por un vector posicin y su movimiento en el espacio est definido por un vector velocidad que integra el comportamiento local y global de los posibles candidatos a ptimos, con estos valores y el modelo linealizado del sistema, el objetivo principal es maximizar el radio de amortiguamiento de los autovalores de la matriz de estado del sistema multimquina reducido mediante la utilizacin de equivalentes dinmicos, con esta investigacin no experimental de tipo tecnolgica aplicada, se tiene dentro de los resultados ms significativos la determinacin de los valores ptimos de los ajustes de ganancia y constantes de tiempo de los compensadores de fase del estabilizador de potencia clsico con la aplicacin de un programa desarrollado en Simulink-Matlab, donde se comprob a travs de simulaciones de pequeas perturbaciones en el sistema de nueve barras y tres generadores del WSCC, las caractersticas de robustez del estabilizador de potencia al garantizar su correcta operacin, estableciendo nuevas tcnicas durante el proceso de diseo e implementacin de nuevos sistemas de excitacin desde el punto de vista de estabilidad.
-
x
NDICE
ACTA DE EVALUACIN ........................................................................................................................................... V
ACTA DE APROBACIN ......................................................................................................................................... VI
DEDICATORIA ...................................................................................................................................................... VII
AGRADECIMIENTOS ............................................................................................................................................ VIII
RESUMEN .............................................................................................................................................................. IX
NDICE..................................................................................................................................................................... X
LISTA DE TABLAS .................................................................................................................................................. XIII
LISTA DE FIGURAS ................................................................................................................................................ XV
INTRODUCCIN ...................................................................................................................................................... 1
CAPTULO 1 ............................................................................................................................................................. 3
PLANTEAMIENTO DEL PROBLEMA .......................................................................................................................... 3
1 OBJETIVO ....................................................................................................................................................... 5
1.1 OBJETIVO GENERAL .......................................................................................................................................... 5 1.2 OBJETIVOS ESPECFICOS ................................................................................................................................... 5
CAPTULO 2 ............................................................................................................................................................. 6
MARCO TERICO .................................................................................................................................................... 6
1 ANTECEDENTES .............................................................................................................................................. 6
2 ESTABILIDAD DE LOS SISTEMAS DE POTENCIA. ............................................................................................ 10
2.1 DEFINICIN ........................................................................................................................................................ 10 2.2 CAUSAS DE INESTABILIDAD .................................................................................................................................... 11
3 GENERADORES SINCRNICOS. ..................................................................................................................... 15
3.1 DEFINICIN ........................................................................................................................................................ 15 3.2 MODELOS DEL GENERADOR SINCRNICO ................................................................................................................. 18
4 SISTEMA DE EXCITACIN. ............................................................................................................................ 22
4.1 DEFINICIN ........................................................................................................................................................ 22 4.2 TIPOS DE SISTEMAS DE EXCITACIN ........................................................................................................................ 30 4.3 MODELOS DE EXCITATRIZ ...................................................................................................................................... 35
5 ESTABILIZADORES DE POTENCIA .................................................................................................................. 36
5.1 INTRODUCCIN ................................................................................................................................................... 36 5.2 ANLISIS EN PEQUEA SEAL DE ESTABILIZADORES DE POTENCIA (EDP). ...................................................................... 37 5.3 TIPOS DE ESTABILIZADORES DE POTENCIA ................................................................................................................ 39 5.4 MODELOS DEL ESTABILIZADOR DE POTENCIA (EDP). .................................................................................................. 41
-
xi
6 SISTEMAS DE POTENCIA MULTIMQUINA. .................................................................................................. 43
6.1 DEFINICIN ........................................................................................................................................................ 43 6.2 EQUIVALENTES DINMICOS DE SISTEMAS MULTIMQUINA. ........................................................................................ 44
7 MTODOS DE OPTIMIZACIN. ..................................................................................................................... 47
7.1 ALGORITMO DE OPTIMIZACIN DE ENJAMBRE DE PARTCULAS. .................................................................................... 49
8 AJUSTE DE ESTABILIZADORES DE POTENCIA EMPLEANDO TCNICAS DE OPTIMIZACIN. ............................ 53
8.1 DEFINICIN ........................................................................................................................................................ 53 8.2 PROGRAMA DE AJUSTE PTIMO DE EDP EN SIMULINK MATLAB. .......................................................................... 57 8.3 APLICACIN DE OPTIMIZACIN DE AJUSTE DE ESTABILIZADORES DE POTENCIA (EDP) EN UNA MQUINA FRENTE A UNA BARRA INFINITA. .................................................................................................................................................................... 58 8.4 NDICE DE DESEMPEO. ....................................................................................................................................... 60
CAPTULO 3 ........................................................................................................................................................... 61
DISEO METODOLGICO ...................................................................................................................................... 61
1 TIPO DE ESTUDIO ......................................................................................................................................... 61
2 MUESTRA .................................................................................................................................................... 61
3 INSTRUMENTOS ........................................................................................................................................... 62
3.1 COMPUTADOR PORTATIL ............................................................................................................................... 62 3.2 PAQUETES COMPUTARIZADOS ...................................................................................................................... 62 3.3 RED DE INTERNET, BIBLIOTECAS Y OTRAS FUENTES ....................................................................................... 63
4 PROCEDIMIENTO ......................................................................................................................................... 63
CAPTULO 4 ........................................................................................................................................................... 65
RESULTADOS......................................................................................................................................................... 65
1 DESCRIPCIN DEL SISTEMA MULTIMQUINA. ............................................................................................. 65
1.1 CARGAS DEL SISTEMA .......................................................................................................................................... 66
2 RESULTADOS OBTENIDOS. ........................................................................................................................... 67
2.1 CONDICIN DE OPERACIN EN ESTADO ESTACIONARIO. ............................................................................................. 67 2.2 EQUIVALENTES DINMICOS DEL SISTEMA MULTIMQUINA. ......................................................................................... 68 2.3 ANLISIS DE PEQUEA SEAL. ............................................................................................................................... 70 2.4 AJUSTE PTIMO DE ESTABILIZADOR DE POTENCIA (EDP) MEDIANTE ENJAMBRE DE PARTCULAS (OEP). .............................. 73
2.4.1 Ajuste ptimo de Estabilizador de Potencia (EDP) Generador frente a Equivalente Dinmico. ........... 74 2.4.2 Ajuste ptimo de Estabilizador de Potencia (EDP) Generador frente a Generadores como Fuente de Tensin Definida. ................................................................................................................................................ 78 2.4.3 Ajuste ptimo de Estabilizador de Potencia (EDP) Generador frente a Equivalente de Thevenin........ 80 2.4.4 Ajuste ptimo de Estabilizador de Potencia (EDP) Sistema Multimquina. ......................................... 81
2.5 AUTOVALORES Y RADIOS DE AMORTIGUAMIENTO. ..................................................................................................... 81 2.6 SIMULACIN NO LINEAL DEL SISTEMA WSCC. .......................................................................................................... 83 2.7 NDICES DE DESEMPEO ....................................................................................................................................... 87 2.8 ANLISIS DE RESULTADOS. .................................................................................................................................... 87
CONCLUSIONES ..................................................................................................................................................... 88
RECOMENDACIONES ............................................................................................................................................. 91
REFERENCIAS BIBLIOGRAFICAS ............................................................................................................................. 93
-
xii
ANEXOS .............................................................................................................................................................. 102
1 DATOS DEL SISTEMA WSCC DE NUEVE BARRAS Y 3 GENERADORES. .......................................................... 103
2 REPORTE DE FLUJO DE CARGA DEL SISTEMA WSCC. ................................................................................... 104
3 PARMETROS ESTNDAR DE GENERADOR EN RGIMEN SUB-TRANSITORIO. ............................................ 105
4 TEOREMA DE REDUCCIN DE KRONN. ....................................................................................................... 106
5 FUNCIN DE MATLAB LINMOD. ................................................................................................................. 107
6 PROGRAMA EN MATLAB DE AJUSTE DE EDP UTILIZANDO ALGORITMO OEP.............................................. 110
7 CURVAS P-V DEL SISTEMA WSCC. .............................................................................................................. 112
-
xiii
LISTA DE TABLAS
TABLA 2.8.1. DATOS DEL GENERADOR Y EXCITATRIZ DEL MODELO 1GBI. ............................................................. 58
TABLA 2.8.2. AJUSTE PTIMO CON ALGORITMO OEP AL SISTEMA UNA MAQUINA FRENTE A UNA BARRA INFINITA. .............................................................................................................................................................. 59
TABLA 4.1.1. DATOS DE CARGAS DEL SISTEMA WSCC. .......................................................................................... 66
TABLA 4.2.1. RESULTADOS DE FLUJO DE CARGA POR NEWTON RAPHSON CASO BASE DEL SISTEMA WSCC.......... 67
TABLA 4.2.2. RESULTADOS DE FLUJO DE CARGA POR NEWTON RAPHSON CASO 1 DEL SISTEMA WSCC ................ 67
TABLA 4.2.3. RESULTADOS DE FLUJO DE CARGA POR NEWTON RAPHSON CASO 2 DEL SISTEMA WSCC ................ 68
TABLA 4.2.4. ADMITANCIA DE LAS CARGAS DEL SISTEMA WSCC ........................................................................... 68
TABLA 4.2.5. MATRIZ DE ADMITANCIAS REDUCIDA POR KRONN CASO BASE. ...................................................... 68
TABLA 4.2.6. MATRIZ DE ADMITANCIAS REDUCIDA POR KRONN CASO 1.............................................................. 69
TABLA 4.2.7. MATRIZ DE ADMITANCIAS REDUCIDA POR KRONN CASO 2.............................................................. 69
TABLA 4.2.8. ANGULO DEL EQUIVALENTE DINMICO DETERMINADO POR CENTRO DE ANGULO. ........................ 69
TABLA 4.2.9. EQUIVALENTE DINMICO DE LOS GENERADORES 1 Y 3 CASO BASE. ................................................ 69
TABLA 4.2.10. EQUIVALENTE DINMICO DE LOS GENERADORES 1 Y 2 CASO BASE. .............................................. 69
TABLA 4.2.11. EQUIVALENTE DINMICO DE LOS GENERADORES 1 Y 3 CASO 1. .................................................... 70
TABLA 4.2.12. EQUIVALENTE DINMICO DE LOS GENERADORES 1 Y 2 CASO 1. .................................................... 70
TABLA 4.2.13. EQUIVALENTE DINMICO DE LOS GENERADORES 1 Y 3 CASO 2. .................................................... 70
TABLA 4.2.14. EQUIVALENTE DINMICO DE LOS GENERADORES 1 Y 2 CASO 2. .................................................... 70
TABLA 4.2.15. VARIABLES DE ESTADO DEL MODELO GENERADOR EQUIVALENTE DINMICO. .............................. 71
TABLA 4.2.16. PUNTO DE OPERACIN DEL MODELO GENERADOR EQUIVALENTE DINMICO. .............................. 72
TABLA 4.2.17. LINEALIZACIN DEL SISTEMA. ........................................................................................................ 72
TABLA 4.2.18. VECTORES DE POSICIN Y VELOCIDAD INICIALES. .......................................................................... 73
TABLA 4.2.19. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL G2 CON LA FUNCIN OBJETIVO N1 ............................................................................................................................................................................. 74
TABLA 4.2.20. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL G2 CON LA FUNCIN OBJETIVO N 2 ............................................................................................................................................................................. 75
TABLA 4.2.21. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL G3 CON LA FUNCIN OBJETIVO N1 ............................................................................................................................................................................. 76
TABLA 4.2.22. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL GENERADOR 3 LA FUNCIN OBJETIVO N2 ....................................................................................................................................................... 77
TABLA 4.2.23. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL GENERADOR 2 LA FUNCIN OBJETIVO N1 ....................................................................................................................................................... 78
-
xiv
TABLA 4.2.24. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL GENERADOR 2 LA FUNCIN OBJETIVO N1 ....................................................................................................................................................... 79
TABLA 4.2.25. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL GENERADOR 2 LA FUNCIN OBJETIVO N1 ....................................................................................................................................................... 80
TABLA 4.2.26. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL GENERADOR 2 LA FUNCIN OBJETIVO N1 ....................................................................................................................................................... 80
TABLA 4.2.27. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL GENERADOR 2 DE REFERENCIA ABIDO ................................................................................................................................................................... 81
TABLA 4.2.28. AJUSTE PTIMO DEL ESTABILIZADOR DE POTENCIA (EDP) DEL GENERADOR 3 DE REFERENCIA ABIDO ................................................................................................................................................................... 81
TABLA 4.2.29. AUTOVALORES Y RADIO DE AMORTIGUAMIENTO DEL MODO ELECTROMECNICO SIN EDP REF ABIDO. .................................................................................................................................................................. 82
TABLA 4.2.30. AUTOVALORES Y RADIO DE AMORTIGUAMIENTO DEL MODO ELECTROMECNICO CON EDP FUNCIN OBJETIVO 1. .......................................................................................................................................... 82
TABLA 4.2.31. AUTOVALORES Y RADIO DE AMORTIGUAMIENTO DEL MODO ELECTROMECNICO CON EDP FUNCIN OBJETIVO 2. .......................................................................................................................................... 82
TABLA 4.2.32. AUTOVALORES Y RADIO DE AMORTIGUAMIENTO DEL MODO ELECTROMECNICO CON EDP SISTEMA MULTIMQUINA REF ABIDO. ................................................................................................................. 82
TABLA 4.2.33. AJUSTE DE ESTABILIZADORES DE POTENCIA PTIMOS SIMULADOS EN EL SISTEMA NO LINEAL. .... 85
TABLA 4.2.34. NDICE DE DESEMPEO DE LAS DESVIACIONES DE VELOCIDAD DE LOS GENERADORES. ................ 87
-
xv
LISTA DE FIGURAS
FIGURA 2.2.1. CLASIFICACIN DE LA ESTABILIDAD DE LOS SISTEMAS DE POTENCIA. ............................................ 14
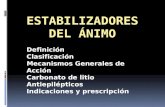
FIGURA 2.3.1. ROTOR DE GENERADOR DE LA CENTRAL HIDROELCTRICA SIMN BOLVAR, GURI, VENEZUELA ... 15
FIGURA 2.3.2. DEVANADO DEL ROTOR (A) EJE DIRECTO (B) EJE DE CUADRATURA. ............................................... 16
FIGURA 2.3.3. MODELO DE GENERADOR SINCRNICO ......................................................................................... 17
FIGURA 2.3.4. REPRESENTACIN DEL NGULO ROTOR EN LOS EJES D Y Q. ........................................................... 17
FIGURA 2.3.5. REPRESENTACIN DEL GENERADOR EN SIMULINK. ........................................................................ 19
FIGURA 2.3.6. TRANSFORMADA DE EN ESTADO ESTACIONARIO DE CORRIENTE DE ESTATOR A ROTOR BLOQUE QDE2QDR. ............................................................................................................................................................ 19
FIGURA 2.3.7. TRANSFORMADA DE TENSIONES TRANSITORIAS DE EJE D Y Q DE ROTOR A ESTATOR BLOQUE QDE2QDR. ............................................................................................................................................................ 20
FIGURA 2.3.8. DIAGRAMA DE BLOQUE DE LAS ECUACIONES DINMICAS DEL ROTOR. ......................................... 20
FIGURA 2.3.9. DIAGRAMA DE BLOQUE DE LAS VARIABLES DE SALIDA TENSIN, CORRIENTE, POTENCIA ACTIVA Y REACTIVA. ............................................................................................................................................................. 20
FIGURA 2.4.1. ESQUEMTICO DE SISTEMA DE EXCITACIN Y GOBERNACIN DE UNA UNIDAD DE GENERACIN. 23
FIGURA 2.4.2. ESQUEMA TRANSDUCTOR DE TENSIN Y CIRCUITO COMPENSADOR DE CARGA............................ 23
FIGURA 2.4.3. ESQUEMA DEL REGULADOR DE TENSIN. ...................................................................................... 24
FIGURA 2.4.4. CURVA DE MAGNETIZACIN DE UN GENERADOR SINCRNICO. .................................................... 25
FIGURA 2.4.5. FUNCIN DE TRANSFERENCIA DEL EXCITADOR DC. ........................................................................ 26
FIGURA 2.4.6. FUNCIN DE TRANSFERENCIA DEL EXCITADOR DC. ........................................................................ 27
FIGURA 2.4.7. CARACTERSTICA DE SALIDA DEL PUENTE RECTIFICADOR. .............................................................. 28
FIGURA 2.4.8. FUNCIONES DE CONTROL Y PROTECCIN DEL SISTEMA DE EXCITACIN. ....................................... 29
FIGURA 2.4.9. SISTEMA DE EXCITACIN DE CORRIENTE DIRECTA DC. ................................................................... 31
FIGURA 2.4.10. A. ANILLOS ROZANTES Y EXCITATRIZ PILOTO EN EJE DE UNIDAD HIDROGENERADORA DE 175 MVA EN GURI, VENEZUELA. B. EXCITADOR DC DE UNIDAD HIDROGENERADORA DE 175 MVA EN GURI, VENEZUELA. .. 31
FIGURA 2.4.11. SISTEMA DE EXCITACIN DE CORRIENTE ALTERNA AC CON RECTIFICADOR ESTACIONARIO. ........ 32
FIGURA 2.4.12. SISTEMA DE EXCITACIN DE CORRIENTE ALTERNA AC CON RECTIFICADOR ROTATIVO. ............... 33
FIGURA 2.4.13. SISTEMA DE EXCITACIN ESTTICO CON FUENTE DE TENSIN..................................................... 34
FIGURA 2.4.14. SISTEMA DE EXCITACIN ESTTICO CON FUENTE COMPUESTA.................................................... 34
FIGURA 2.4.15. SISTEMA DE EXCITACIN ESTTICO DE UNIDAD DE GENERACIN DE 400 MVA EN GURI, VENEZUELA ........................................................................................................................................................... 35
FIGURA 2.4.16. MODELO DE LA EXCITATRIZ IEEE TIPO 1. ...................................................................................... 35
FIGURA 2.4.17. MODELO DE LA EXCITATRIZ TIPO RPIDA. .................................................................................... 35
FIGURA 2.5.1. DIAGRAMA DE BLOQUES DE UN ESTABILIZADOR DE POTENCIA. .................................................... 36
-
xvi
FIGURA 2.5.2. DIAGRAMA DE BLOQUE DE GENERADOR, RAT Y ESTABILIZADOR DE POTENCIA. ............................ 37
FIGURA 2.5.3. VARIACIONES DEL NGULO, VELOCIDAD Y TENSIN EN TERMINALES KA =10 (BAJO) Y SIN EDP. .. 38
FIGURA 2.5.4. VARIACIONES DEL NGULO, VELOCIDAD Y TENSIN EN TERMINALES KA =10 (BAJO) Y CON EDP. . 38
FIGURA 2.5.5. VARIACIONES DEL NGULO, VELOCIDAD Y TENSIN EN TERMINALES KA =200 (ALTO) Y SIN EDP. . 38
FIGURA 2.5.6. VARIACIONES DEL NGULO, VELOCIDAD Y TENSIN EN TERMINALES KA =200 (ALTO) Y CON EDP. ............................................................................................................................................................................. 38
FIGURA 2.5.7. DIAGRAMA DE BLOQUE DEL ESTABILIZADOR DE POTENCIA TIPO DELTA P-OMEGA. ...................... 40
FIGURA 2.5.8. ESTABILIZADOR DE POTENCIA GENRICO. ...................................................................................... 41
FIGURA 2.5.9. ESTABILIZADOR DE POTENCIA PSS1A. ............................................................................................ 42
FIGURA 2.5.10. ESTABILIZADOR DE POTENCIA PSS2A. .......................................................................................... 42
FIGURA 2.6.1. MODELO CLSICO DE SISTEMAS MULTIMQUINA. ........................................................................ 43
FIGURA 2.6.2. DESPLAZAMIENTO ANGULAR DE GENERADORES Y GENERADOR EQUIVALENTE EN SISTEMAS MULTIMQUINA................................................................................................................................................... 45
FIGURA 2.6.3. MODELO DEL SISTEMA EQUIVALENTE DINMICO. ......................................................................... 46
FIGURA 2.7.1. DESCRIPCIN DE LA VELOCIDAD Y POSICIN DE PARTCULAS EN LA OEP. ...................................... 49
FIGURA 2.7.2. DIAGRAMA DE FLUJO DEL ALGORITMO DE OEP ASNCRONA. ........................................................ 52
FIGURA 2.8.1. REPRESENTACIN EN EL PLANO COMPLEJO DE FUNCIONES OBJETIVO DEL ALGORITMO DE OEP PARA AJUSTES DE EDP. ......................................................................................................................................... 55
FIGURA 2.8.2. PROCEDIMIENTO GENERAL DEL ALGORITMO DE AJUSTE OPTIMO DE EDP BASADO EN PSO. ......... 57
FIGURA 2.8.3. VALOR DE LA DESVIACIN DE LA VELOCIDAD ANGULAR SIN EDP Y CON EDP PTIMO. .................. 59
FIGURA 4.1.1. MODELO DE TRES MQUINAS Y NUEVE BARRAS SISTEMA WSCC. .................................................. 66
FIGURA 4.2.1. MODELO EN SIMULINK DE GENERADOR FRENTE A EQUIVALENTE DINMICO. ............................... 71
FIGURA 4.2.2. FUNCIN OBJETIVO 1 DEL ALGORITMO DE OEP APLICADO AL G2 CON ED. .................................... 74
FIGURA 4.2.3. FUNCIN OBJETIVO 2 DEL ALGORITMO DE OEP APLICADO AL G2 CON ED. .................................... 75
FIGURA 4.2.4. FUNCIN OBJETIVO 1 DEL ALGORITMO DE OEP APLICADO AL G3 CON ED. .................................... 76
FIGURA 4.2.5. FUNCIN OBJETIVO 2 DEL ALGORITMO DE OEP APLICADO AL G3 CON ED. .................................... 77
FIGURA 4.2.6. FUNCIN OBJETIVO 1 DEL ALGORITMO DE OEP APLICADO AL G2 CON FTD. .................................. 78
FIGURA 4.2.7. FUNCIN OBJETIVO 1 DEL ALGORITMO DE OEP APLICADO AL G3 CON FTD. .................................. 79
FIGURA 4.2.8. FUNCIN OBJETIVO 1 DEL ALGORITMO DE OEP APLICADO A LOS G2 Y G3 CON ETH. ..................... 80
FIGURA 4.2.9. MODELO DEL SISTEMA MULTIMQUINA WSCC EN SIMULINK. ...................................................... 83
FIGURA 4.2.10. RESULTADOS DE FLUJO DE CARGA DEL SISTEMA WSCC EN SIMULINK Y LIBRERA POWERGUI. .... 84
FIGURA 4.2.11. DESVIACIN DE LA VELOCIDAD ANGULAR DEL GENERADOR 01 CON FALLA TRIFSICA EN LA BARRA 7................................................................................................................................................................ 85
FIGURA 4.2.12. DESVIACIN DE LA VELOCIDAD ANGULAR DEL GENERADOR 01 CON FALLA TRIFSICA EN LA BARRA 7................................................................................................................................................................ 86
FIGURA 4.2.13. DESVIACIN DE LA VELOCIDAD ANGULAR DEL GENERADOR 03 CON FALLA TRIFSICA EN LA BARRA 7................................................................................................................................................................ 86
-
1
INTRODUCCIN
El crecimiento e impacto en la sociedad de los sistemas de generacin elctrica, ha dado origen al desarrollo y evolucin de metodologas emergentes para optimizar la planificacin, operacin y mantenimiento de los sistemas de potencia; siendo un factor importante, el anlisis de estabilidad considerando modelos complejos producto de la implementacin de nuevas tecnologas en los sistemas de control de los equipos principales de los sistemas de generacin, transmisin y distribucin de energa.
El resultado obtenido de dicho anlisis permite evaluar y mitigar uno de los mayores riesgos de un sistema de potencia, el cual consiste en una prdida total de sincronismo de las unidades de generacin o black-out, siendo las oscilaciones de potencia no amortiguadas una de las causas probables e importantes.
El estudi de este fenmeno origin la aplicacin de un elemento clave en el control de las unidades de generacin como son los estabilizadores de potencia para proporcionar una seal amortiguante en los sistemas de excitacin de las unidades de generacin. El ajuste de los parmetros de los estabilizadores de potencia es un problema complejo y su solucin influye en el desempeo satisfactorio del sistema, para obtener una solucin se han definido diversas tcnicas secuenciales cuya desventaja es que requiere un elevado tiempo de procesamiento en el clculo y dependen de los valores iniciales para obtener resultados deseados; considerando que el problema de optimizacin de los estabilizadores de potencia posee ms de un ptimo local se recurre a nuevas aplicaciones de tecnologas evolutivas que permite obtener ptimos globales basndose en estudios del comportamiento biolgico de la naturaleza; tales como, el uso de algoritmos genticos, colonia de hormigas y enjambre de partculas.
-
2
En consecuencia, el presente trabajo desarroll una metodologa para determinar el ajuste ptimo de los estabilizadores de potencia en sistemas multimquina, basado en tcnicas de optimizacin estocstica para garantizar la confiabilidad y seguridad del sistema ante oscilaciones de potencia. El alcance del trabajo comprende el estudio, desarrollo y simulacin de modelos para estabilidad dinmica de los generadores, sistemas de excitacin y estabilizadores de potencia de las unidades de generacin de un sistema modelo de tres generadores y nueve barras; as mismo, una reduccin del sistema mediante la aplicacin de equivalentes dinmicos; finalmente la aplicacin de algoritmos de optimizacin utilizando la tcnica de enjambre de partculas con el objetivo de disminuir las magnitudes de las oscilaciones de potencia en el sistema para diversos tipos de fallas.
La investigacin es no experimental del tipo tecnolgica o aplicada, debido a que se utiliz un programa en Matlab-Simulink que permite determinar los ajustes ptimos de los estabilizadores de potencia en un sistema multimquina.
El contenido del trabajo est estructurado en cinco (05) captulos; el primer captulo es el planteamiento del problema y sus motivaciones; el segundo captulo, sirve de base con el marco terico sobre los diferentes modelos del sistema de potencia, la teora de los equivalentes dinmicos y el algoritmo de optimizacin estocstica de enjambre de partculas; el tercer captulo, plantea el marco metodolgico donde se describe el procedimiento de investigacin, tipo de estudio, poblacin y muestra; el cuarto captulo es el desarrollo del modelo del sistema en estudio, los valores de los equivalentes dinmicos, ajustes inciales de los estabilizadores de potencia, parmetros del algoritmo de optimizacin con los resultados las simulaciones y su anlisis; posteriormente, las conclusiones y recomendaciones producto de este trabajo y finalmente la bibliografa consultada.
-
3
CAPTULO 1 PLANTEAMIENTO DEL PROBLEMA
Durante los ltimos aos, los avances de la tecnologa en controladores de potencia con la incorporacin de los estabilizadores de potencia (EDP) en los sistemas de excitacin de las unidades de generacin, permite que los ingenieros de diseo y planificacin de operacin del sistema, posea un equipo de control cuyos ajustes impactan de manera significativa en el anlisis de estabilidad en sistemas multimquina; debido a que permiten mitigar fenmenos no deseados como las oscilaciones de potencia que representan un riesgo en la seguridad y la confiabilidad del sistema. Sin embargo, el adecuado funcionamiento de los estabilizadores de potencia exige un estudio complejo para su correcta entonacin.
Generalmente, para resolver la determinacin de los parmetros del estabilizador de potencia (EDP) se aplican mtodos convencionales basados en un anlisis en el dominio de la frecuencia del sistema cuyos valores son ajustados por ensayo y error; lo cual, representa un gran esfuerzo por parte de los especialistas y probablemente no garantice el valor ptimo del mismo. As mismo, el desempeo del estabilizador de potencia (EDP) se reduce ante diversas condiciones de operacin con un ajuste predefinido.
En consecuencia, motivado a la importancia del problema surge la necesidad de desarrollar metodologas basadas en algoritmos de optimizacin no lineal cuyas investigaciones en esta rea indican una elevada tendencia en la formulacin de tcnicas heursticas basadas en el comportamiento de la naturaleza animal y humana; tales como, el algoritmo de enjambre de partculas (OEP).
-
4
Por lo anteriormente expuesto, se desarroll el siguiente trabajo de grado, con el propsito de determinar los ajustes ptimos de los estabilizadores de potencia en sistemas multimquina utilizando tcnicas heursticas basadas en el algoritmo de enjambre de partculas, cuyo objetivo principal es mitigar el efecto de las oscilaciones de potencia.
En funcin de presentar la metodologa de dicha investigacin, se realiz un programa informtico en Matlab Simulink donde se representaron los diversos modelos matemticos de los equipos asociados al sistema, adecuados para el anlisis de estabilidad; integrndose el algoritmo de optimizacin de enjambre de partcula en la misma plataforma; las diversas variables fueron calculadas con datos del sistema de acuerdo a referencias bibliogrficas; finalmente, la simulacin y validacin de los resultados obtenidos.
-
5
1 OBJETIVO
Con el desarrollo del alcance del siguiente estudio, se logr de forma general y especifica los siguientes objetivos:
1.1 OBJETIVO GENERAL
Optimizar los ajustes del estabilizador de potencia utilizando el algoritmo de enjambre de partculas en equivalentes dinmicos de sistemas multimquina, para garantizar la estabilidad del sistema ante oscilaciones de potencia.
1.2 OBJETIVOS ESPECFICOS
1.2.1. Analizar la literatura y referencias bibliogrficas sobre oscilaciones de potencia ante pequeas perturbaciones, representacin de modelos de estabilizadores de potencia en generadores y algoritmos de optimizacin de enjambre de partculas.
1.2.2. Definir las caractersticas tcnicas de los equipos y componentes del sistema del WSCC de nueve barras y tres generadores.
1.2.3. Determinar los equivalentes dinmicos del sistema del WSCC de nueve barras y tres generadores.
1.2.4. Aplicar y desarrollar el algoritmo de optimizacin para determinar el ajuste ptimo de los estabilizadores de potencia en el sistema del WSCC de nueve barras y tres generadores.
1.2.5. Disear y simular pruebas con un programa informtico para la validacin y anlisis de los resultados obtenidos.
-
6
CAPTULO 2 MARCO TERICO
En el siguiente captulo, se presentan las bases tericas de los conocimientos aplicados en el desarrollo del trabajo; debido a que se definen los antecedentes que reflejan la revisin de la literatura aplicada al proyecto, el estudio de la estabilidad de los sistemas de potencia, modelos o representacin de los diversos equipos y finalmente el algoritmo de optimizacin de enjambre de partculas (OEP) aplicado a la determinacin del ajuste de estabilizadores de potencia en equivalentes dinmicos de sistema multimquina.
1 ANTECEDENTES
El desarrollo del primer sistema elctrico de potencia fue realizado en el ao de 1.882 por el Ing. Thomas A. Edison basado en corriente continua y ubicado en el centro geomtrico de la carga de la ciudad de Nueva York; cuando surge la necesidad de transmitir e interconectar los sistemas producto del desarrollo de los pases; se fundamenta la fabricacin del transformador de potencia para elevar las tensiones en el sistema de corriente alterna y de esta forma transportar la energa a grandes distancias disminuyendo las perdidas en las lneas; surgiendo la normalizacin de la frecuencia de operacin del sistema en pases como Estados Unidos (60 Hz), Canad y el continente Europeo (50 Hz).
Los primeros anlisis de problemas de estabilidad nacen a principios de la dcada de los aos 1.920, con el proceso de interconexin entre los grandes sistemas de potencia y fundamentalmente asociados a tiempos de despeje lentos del sistema de
-
7
protecciones ante cortocircuitos, debido a la inexistencia de recursos tecnolgicos avanzados para el clculo se definieron modelos sencillos del sistema que permitan dar solucin con mtodos grficos como el criterio de reas iguales; los resultados obtenidos, concluyeron la importancia de poseer sistemas de despeje de fallas ms rpidos y reguladores de tensin de los sistemas de excitacin con ganancias ms elevadas; donde la puesta en funcionamiento de equipos con estas caractersticas incrementaba la estabilidad del sistema en rgimen permanente; lo cual, permita aumentar la potencia transferida a las cargas, pero se observ que en algunos casos aparecan comportamientos oscilatorios no deseados en el sistema de potencia.
La dinmica de los sistemas de excitacin se incorpor a los estudios de estabilidad durante los aos 1.950 y 1.960. La implementacin del estabilizador de potencia (EDP) en los generadores de centrales hidroelctricas surge a mediados de 1.960, con una publicacin de los investigadores De Mello y Concordia en el ao 1.969 donde se realiz el diseo de los estabilizadores de potencia (EDP), basndose en la teora de control clsica, formulando el sistema lineal equivalente y realizando clculos de los parmetros del regulador, con la limitante que al variar el punto de operacin, el sistema no amortiguaba correctamente las oscilaciones.
Durante los prximos aos, la incorporacin de nuevos elementos de electrnica de potencia y el desarrollo de los procesadores dieron origen a diversidad de aplicaciones y estudios en el rea de ingeniera elctrica, uno de los mayores avances lo proporcion el profesor De Mello en conjunto con una serie de profesionales de la empresa Power Technologies en la ciudad de Nueva York durante el ao 1.980, con la implementacin de estabilizadores de potencia (EDP) en sistemas multimquina basado en la tcnica de anlisis de autovalores.
El concepto de estabilizadores de potencia adaptivos, los investigadores Xia y Hyedt en el ao 1.983 plantean metodologas de autoajuste utilizando la teora de mnimos cuadrados de los parmetros en tiempo real en el sistema de los estabilizadores de potencia (EDP).
-
8
La determinacin de ajuste de los estabilizadores de potencia (EDP) fuera de lnea para diversas condiciones de operacin del sistema, la comparacin del amortiguamiento de las oscilaciones entre un EDP convencional y un controlador adaptivo; as mismo, la utilizacin del PSS para disminuir el efecto de las pulsaciones de presin en una central hidroelctrica son parte de los trabajos realizados por el investigador Bollinger a finales de 1.980 y principios de 1.990, en la Universidad de Alberta en Canad.
Durante la dcada de los noventa, los mtodos de solucin tienden a la aplicacin de tcnicas emergentes para la solucin ptima de problemas no lineales como el ajustes ptimo de estabilizadores de potencia; dentro de dichas tcnicas se puede citar integracin del error cuadrtico, redes neurales entrenndola con la potencia acelerante de la unidad de generacin para diversas condiciones de operacin y mtodos de programacin cuadrtica recursiva.
La evolucin de los modelos de los estabilizadores de potencia (EDP), se implementa en el ao 1.999 por los investigadores Murdoch, Venkataraman, Lawson y Pearson con el tipo de EDP considerando como seal de entrada la integral de la Potencia Acelerante. Recientemente, se introduce el nuevo concepto de estabilizador de potencia (EDP) Multibanda desarrollado por personal del Centro de Investigacin IREQ y de la empresa Asea Brown Boveri (ABB).
La aplicacin de mtodos directos para el desarrollo de estudios de estabilidad fue planteada con la extensin del criterio de reas iguales a sistemas multimquina mediante el uso de equivalentes dinmicos de los generadores considerando el concepto de coherencia y centro de ngulos, durante finales de los aos 1.980 y principios de 1.990 por los profesores Riibbens y Pavella de la Universidad de Blgica.
El desarrollo de tcnicas de inteligencia artificial estocsticas como el algoritmo de optimizacin de enjambre de partculas (OEP) nace en el ao 1995 con los
-
9
investigadores Kennedy y Herbart, los cuales presentaron esta metodologa con grandes ventajas por ser simple de implementar y con propiedades de robustez en la bsqueda de la solucin, debido a que cambia los paradigmas de los posibles candidatos a ptimos, verificando su comportamiento de forma global y local, donde la funcin objetivo siempre integra ambos, lo cual permite mantener los principios de proximidad, calidad, diversidad, estabilidad y adaptabilidad en la solucin ptima.
La aplicacin de la tcnica de enjambre de partculas en la determinacin de los ajustes ptimos de los estabilizadores de potencia, se inicia en el ao 2.002 en la Universidad King Fahd de Arabia Saudita con una investigacin del profesor Abido con el modelo lineal del sistema multimquina de nueve barras y tres mquinas, determinndose los parmetros ptimos para diversas condiciones de operacin y comparndose con los resultados obtenidos por algoritmos genticos y el mtodo del gradiente. Las recientes investigaciones relacionadas con esta tcnica, incluyen variantes con mtodos hbridos para la definicin de las partculas y funcin objetivo, se incorporan nuevos modelos de controladores como FACTS y TCSC; as mismo, su aplicacin con generadores elicos en el sistema de potencia.
En el sistema elctrico de Venezuela, su interconexin y desarrollo se fundamento principalmente con la creacin de grandes centrales hidroelctricas a partir de los aos 70; la puesta en servicio de nuevas centrales en el pas para cubrir la demanda creciente y la modernizacin de las centrales existentes, son escenarios que actualmente exigen diseos desde el punto de vista de estabilidad que ameriten la adecuada ubicacin y ajuste de estabilizadores de potencia de nueva tecnologa en nuestro sistema.
En consecuencia, el planteamiento del siguiente trabajo define una nueva metodologa que se diferencia de las presentadas hasta la fecha, por la incorporacin de equivalentes dinmicos para reducir la dimensin del problema multimquina y evaluar el comportamiento de estabilizadores de potencia (EDP) con la tcnica de optimizacin de enjambre de partculas.
-
10
2 ESTABILIDAD DE LOS SISTEMAS DE POTENCIA.
2.1 Definicin
En un sistema multimquina, su dinmica est definida por un conjunto de ecuaciones diferenciales ordinarias (EDO) no lineales, en el espacio y tiempo, cuyas funciones presentan la siguiente forma: = , , , = 1,2, ,
Ecuacin 2.2.1. Sistema No Lineal de EDO.
Donde, n es el orden del sistema y r el nmero de entradas, en notacin matricial se puede definir como el vector de x que est conformado por cada una de las variables de estado y el vector u de entradas. Las variables de salida es representado por un vector f(x,u,t) relacionado con las variables de estado y entrada mediante una funcin de tipo no lineal.
= , , = = =
Ecuacin 2.2.2. Vector de estado, entrada y funcin del Sistema No Lineal de EDO.
El punto de equilibrio del sistema se obtiene cuando las variaciones de las variables de estado con respecto al tiempo son iguales a cero. = 0
Ecuacin 2.2.3. Punto de equilibrio del sistema.
La estabilidad de un sistema dinmico en el caso lineal es independiente del valor de entrada, es decir que si el valor de la entrada es cero el sistema es capaz de volver al estado original.
En el caso de sistemas no lineales, si depende del tipo y magnitud de la entrada, siendo clasificadas de acuerdo a la regin que ocupe el vector de estado en el espacio de la manera siguiente:
-
11
Estabilidad Local Estabilidad Finita Estabilidad Global.
La estabilidad local se define cuando ocurre una pequea perturbacin en el sistema y este retorna a su punto de equilibrio original o muy cercano al mismo. Este tipo de estabilidad es basado su estudio con la linealizacin del sistema dinmico. La estabilidad finita acota el espacio o regin posible de las variables de estado y la global es el espacio general de soluciones.
En resumen, se puede decir que en funcin de los equipos, variables de estado y entradas asociadas a la dinmica del sistema multimquina; por lo tanto, un sistema es estable cuando posee la capacidad de que todas las unidades de generacin permanezcan en sincronismo y en condiciones normales y aceptables de operacin, al momento de ocurrir fenmenos que involucren el desplazamiento del ngulo del rotor, variaciones en la tensin y las condiciones de control de los equipos.
2.2 Causas de Inestabilidad
La evaluacin de la inestabilidad del sistema de potencia, obedece a diversos comportamientos dinmicos que dependen de las diversas formas de configuracin y operacin. Existen dos causas principales de inestabilidad, prdida del sincronismo de los generadores y depresiones de tensin en cada una de las barras del sistema.
a) Estabilidad del ngulo del rotor. La estabilidad del ngulo del rotor representa la capacidad de los generadores de
mantenerse en sincronismo, en condiciones normales de operacin o luego de una perturbacin. El fenmeno asociado son las oscilaciones electromecnicas del sistema consiste en aceleraciones y desaceleraciones variables del rotor de un generador o un grupo de generadores, influyendo en los valores de potencia elctrica y frecuencia de operacin del sistema.
-
12
En la condicin de operacin en rgimen permanente existe un equilibrio entre la potencia elctrica generada y la potencia mecnica, al perturbar el sistema elctrico de potencia existe una variacin angular que obedece a la aceleracin de los generadores y posteriormente una desaceleracin producto de actuacin de los sistemas de proteccin y control al retornar a su condicin original de operacin. La estabilidad de los generadores depende en cierta forma de que se generen pares de restauracin necesarios.
Una desviacin en el par elctrico, puede ser expresada en dos componentes un par sincronizante y un par de amortiguamiento, como se muestra en la siguiente ecuacin. = + !
Ecuacin 2.2.4. Desviacin en el par elctrico.
El valor representa el par de sincronizacin que vara en fase con el ngulo del rotor. El valor ! el par de amortiguamiento que vara en fase con la velocidad del rotor. Para facilitar el anlisis, es habitual clasificar la estabilidad del ngulo del rotor en dos categoras: Estabilidad de pequeas perturbaciones y transitorias.
Estabilidad de pequea seal: representa la capacidad del sistema elctrico de potencia para mantener el sincronismo bajo pequeas perturbaciones debido a la accin continua de variaciones de la demanda y la generacin, este comportamiento dinmico permite que las ecuaciones diferenciales del sistema sean linealizadas bajo el punto de operacin inicial. La inestabilidad puede aparecer de dos formas producto de falta de par de sincronizacin que origina un aumento de forma montona del ngulo del rotor y por falta de par de amortiguamiento que origina oscilaciones de la velocidad del rotor.
Los valores de inestabilidad dependen de las condiciones inciales, los parmetros de las lneas de transmisin, los sistemas de excitacin de las mquinas. En los generadores sin regulador automtico de tensin se genera un aumento del ngulo del rotor, en caso de poseer el regulador, es necesario un par de
-
13
amortiguamiento para disminuir las oscilaciones del rotor. Por lo tanto, para asegurar estabilidad en pequeas perturbaciones es necesario un par de amortiguamiento suficiente para mitigar las oscilaciones del rotor, las cuales pueden ser clasificadas de acuerdo a los siguientes tipos.
Modo Intraplanta aparece entre mquinas de una misma central, las reactancias y las constantes de inercia son pequeas, por los que la frecuencia de oscilacin son las ms elevadas del orden de 1.5 Hz a 3 Hz, tpicamente en los estudios de estabilidad no son utilizados este tipo de modos ya que se representa toda la central como un nico generador.
Modo Locales o Mquina Sistema comprende los modos asociados a un grupo de generadores con respecto al sistema. Su contante de inercia es baja, la frecuencia de oscilacin se encuentra en el rango de 0.8 Hz y 1.8 Hz.
Modos Inter-rea en los que oscilan un grupo de generadores de un rea determinada en oposicin con generadores dispuestos en otras reas, la frecuencia de oscilacin se encuentra en el rango de 0.2 Hz y 0.5 Hz.
Modos Control o Sistema de excitacin permite mejorar el factor de amortiguamiento mediante acciones de control del sistema de excitacin para los modos mecnicos.
Modos torsionales producto de las oscilaciones torsionales producidas en las distintas partes del rotor debido a que no es completamente rgido.
Estabilidad transitoria: estudia la estabilidad ante grandes perturbaciones. En este caso el estudio del comportamiento dinmico es no lineal, este tipo de perturbaciones pueden ser cortocircuitos entre fases, entre fase y tierra, conexin y desconexin brusca de grandes cargas. Las fallas son aisladas mediante la aplicacin y funcionamiento del sistema de protecciones.
-
b) Estabilidad de la tensin.Representa la capacidad de mantener en rangos aceptables de operacin de la
tensin de las diversas barras del sistema, ante condiciones normales de funcionamiento o bajo perturbaciones, se pueden originar colapsdependiendo de las condiciones de operacin inciales.
c) Intervalo del tiempo de anlisis.De acuerdo al perodo de tiempo son clasificadas en estabilidad a largo plazo y
corto plazo. La estabilidad a corto plazo estudia la dinmica ante grandes perturbaciones de la mquina y sus reguladores, se restringe a un margen de tiempo desde 0 seg hasta 60 seg. La estabilidad a largo plazo se desprecia la dinmica de los reguladores y se consideran los equipos con una dinmica ms lenta, el margen del tiempo de anlisis se amplia de 10 a 15 minutos.
Figura 2.2.1. Clasificacin de la estabilidad de los
Estabilidad de la tensin. Representa la capacidad de mantener en rangos aceptables de operacin de la
tensin de las diversas barras del sistema, ante condiciones normales de funcionamiento o bajo perturbaciones, se pueden originar colapsdependiendo de las condiciones de operacin inciales.
Intervalo del tiempo de anlisis. De acuerdo al perodo de tiempo son clasificadas en estabilidad a largo plazo y
corto plazo. La estabilidad a corto plazo estudia la dinmica ante grandes perturbaciones de la mquina y sus reguladores, se restringe a un margen de tiempo
60 seg. La estabilidad a largo plazo se desprecia la dinmica de los reguladores y se consideran los equipos con una dinmica ms lenta, el margen del tiempo de anlisis se amplia de 10 a 15 minutos.
Clasificacin de la estabilidad de los sistemas de potencia
14
Representa la capacidad de mantener en rangos aceptables de operacin de la tensin de las diversas barras del sistema, ante condiciones normales de funcionamiento o bajo perturbaciones, se pueden originar colapsos de tensin
De acuerdo al perodo de tiempo son clasificadas en estabilidad a largo plazo y corto plazo. La estabilidad a corto plazo estudia la dinmica ante grandes perturbaciones de la mquina y sus reguladores, se restringe a un margen de tiempo
60 seg. La estabilidad a largo plazo se desprecia la dinmica de los reguladores y se consideran los equipos con una dinmica ms lenta, el margen del
sistemas de potencia.
-
15
3 GENERADORES SINCRNICOS. 3.1 Definicin
Un sistema de potencia se caracteriza por la utilizacin de generadores sincrnicos trifsicos, de acuerdo a la fuente principal de energa son tpicamente asociados a turbinas hidrulicas turbinas de vapor o gas. La relevancia e importancia de dicho equipo, ha motivado al desarrollo de investigaciones que comprenden la modelacin y desempeo durante la etapa de diseo, puesta en funcionamiento y operacin del equipo.
El generador sincrnico est formado por dos elementos fundamentales como son el campo y la armadura. La armadura o estator que representa la parte fija de la mquina y el elemento sustentador del campo magntico; el campo o rotor que comprende la parte mvil o giratoria de la mquina que se encuentra acoplado a la turbina a travs de un eje. En forma general, la dimensin fsica del devanado del estator es mayor que el rotor producto del nivel de tensin de operacin, el tipo de aislamiento y los esfuerzos transitorios.
Figura 2.3.1. Rotor de Generador de la Central Hidroelctrica Simn Bolvar, Guri, Venezuela
-
16
El estator est integrado por un bastidor o marco del estator, donde en el interior se encuentra el ncleo formado por un conjunto apilado de lminas de material ferromgnetico con ranuras internas para instalar el devanado del estator formado por barras conectadas en la parte superior e inferior distribuidas igualmente sobre los pares de polos y espaciadas cada 120 elctricos, su fija cin se realiza mediante cuas de apriete y aislantes.
Los polos del rotor estn ubicados en la periferia de la estructura soporte araa, que a la vez sirve de acople el eje de la mquina; los polos dependiendo de su forma pueden ser salientes o cilndricos. Los polos salientes aplican en mquinas sincrnicas de baja velocidad, como los hidrogeneradores y los polos cilndricos aplican en los generadores trmicos de altas velocidades. El devanado del rotor es representado en dos ejes; un eje directo d que se encuentra frente al polo y un eje de cuadratura q desplazado noventa grados (90) elc tricos. El eje directo d y el eje q estn dispuestos respectivamente de forma colineal y cuadratura al eje magntico de campo, ambos girando con respecto al estator a la velocidad del rotor.
Figura 2.3.2. Devanado del Rotor (a) eje directo (b) eje de cuadratura.
(a) (b)
ESTATOR
ROTOR
POLO
FASE A
FASE C
FASE B
Devanados Polares
-
El modelo matemtico del generador sincrnico los devanados del estator en las tres fases, el devanado de cuadratura y por amortiguaen la porcin de acero solido del rotor, tal como se muestra en la figura
Figura
Al determinar las tensiones inducidas en los devanados del estator y del rotor se observa la dependencia del tiempo del estator y rotor, por lo tanto se utiliza la transformada de Park para referenciatensiones y corrientes del estator a los ejes directo d y cuadratura q del rotor eliminando la dependencia del tiempo.() es el ngulo formado entre el eje q y la tensin en barra del g
Figura 2.3.4
El modelo matemtico del generador sincrnico se conforma porlos devanados del estator en las tres fases, el devanado del rotor en el eje directo,
amortiguamiento de los polos o el efecto de las corrientes de Eddy n de acero solido del rotor, tal como se muestra en la figura
Figura 2.3.3. Modelo de Generador Sincrnico.
Al determinar las tensiones inducidas en los devanados del estator y del rotor se observa la dependencia del tiempo y la posicin del rotor en el valor de del estator y rotor, por lo tanto se utiliza la transformada de Park para referenciatensiones y corrientes del estator a los ejes directo d y cuadratura q del rotor eliminando la dependencia del tiempo. Como se muestra en la figura 3.4., el ngulo del rotor
es el ngulo formado entre el eje q y la tensin en barra del generador
3.4. Representacin del ngulo rotor en los ejes d y q.
17
se conforma por un circuito con en el eje directo, el eje
de los polos o el efecto de las corrientes de Eddy n de acero solido del rotor, tal como se muestra en la figura 2.3.3.
Al determinar las tensiones inducidas en los devanados del estator y del rotor se el valor de las inductancias
del estator y rotor, por lo tanto se utiliza la transformada de Park para referenciar las tensiones y corrientes del estator a los ejes directo d y cuadratura q del rotor eliminando
ngulo del rotor delta enerador Eb.
. Representacin del ngulo rotor en los ejes d y q.
-
18
3.2 Modelos del Generador Sincrnico
En el siguiente trabajo, se utiliz el modelo de generador de los ejes d y q, planteado anteriormente, considerando el rgimen transitorio para realizar el anlisis de estabilidad de pequeas perturbaciones para el proceso de optimizacin del estabilizador de potencia. As mismo, el modelo sub-transitorio para la simulacin del comportamiento dinmico de los generadores ante fallas trifsicas en el sistema de potencia.
a) Modelo Transitorio Simplificado del Generador Sincrnico Para el rgimen transitorio, se puede despreciar los efectos de la corriente
inducida en el eje q en un rotor de acero solido, la cual es representada por un devanado ficticio g, esta tensin de entrada Eg es aproximadamente cero. As mismo, las derivadas de los enlaces de flujo del estator en el eje de cuadratura q en el tiempo son valores despreciables, motivado a que las constantes de tiempo en rgimen transitorio son elevadas; por lo tanto, el modelo est representado por las siguientes ecuaciones: "# = %# & + ' " = % ## + '
Ecuacin 2.3.1. Ecuacin del devanado del estator. )'#) + '# = '* # )' ) + ' = '+ + ,# #-#
Ecuacin 2.3.2. Ecuacin del devanado del rotor. . = /'## + ' + ,# - #0
Ecuacin 2.3.3. Ecuacin del Torque Electromecnico.
21 )23 3/356) = .78 + .9:78 ;.778 )) = 3 3 3 =
-
19
En la siguiente figura 2.3.5, se representa el diagrama de boques del generador definido en los modelos de SIMULINK, en este se presentan las ecuaciones del estator mediante el bloque estator; las del rotor con sus ecuaciones dinmicas mediante el bloque Rotor; las de transformada de las ecuaciones de corriente y tensin reflejadas del estator al rotor y viceversa mediante los bloques qde2qdr y qdr2qde respectivamente; finalmente, para los valores de salida de tensin, corriente, potencia activa y aparente un bloque denominado VIPQ.
Figura 2.3.5. Representacin del generador en SIMULINK.
Figura 2.3.6. Transformada de en estado estacionario de corriente de estator a rotor Bloque qde2qdr.
-
20
Figura 2.3.7. Transformada de tensiones transitorias de eje d y q de rotor a estator Bloque qde2qdr.
Figura 2.3.8. Diagrama de bloque de las ecuaciones dinmicas del Rotor.
Figura 2.3.9. Diagrama de bloque de las variables de salida tensin, corriente, potencia activa y reactiva.
b) Modelo Sub-Transitorio del Generador Sincrnico El modelo sub-transitorio considerado del generador sincrnico est
representado por el modelo de estado de sexto orden y la parte mecnica es considerada similar a la de rgimen transitorio pero considerando las tensiones y reactancias de eje directo y cuadratura en rgimen sub-transitorio. El modelo considera
-
21
la dinmica del estator, rotor y devanados amortiguadores; por lo tanto, el modelo est representado por las siguientes ecuaciones:
= = > + )) ? 3?# =# = ># + )) ?# + 3? ? = @ + @. ,* & + A & - ?# = @## + @.#A#&
Ecuacin 2.3.6. Ecuacin del devanado del estator. =* & = >* * + )) ?* =A & = >A A + )) ?A
=A#& = >A#A# + )) ?A# =A#& = >A#A# + )) ?A# ?* = @* * + @. , + A & - ?A = @A A + @. , + * & - ?A# = @A#A# + @.## ?A# = @A#A# + @.##
Ecuacin 2.3.7. Ecuacin del devanado del rotor.
Este modelo es aplicado durante la simulacin no lineal del sistema y se obtiene de la librera del simpowersystem synchronous machine de Simulink y la relacin entre los parmetros de reactancias en el eje directo y cuadratura y constantes de tiempo con los parmetros de las Ecuaciones 2.3.6 y 2.3.7., se muestra en el Anexo N 03.
-
22
4 SISTEMA DE EXCITACIN. 4.1 Definicin
El sistema de excitacin de una mquina sincrnica lo constituyen el conjunto de equipos cuyo objetivo principal es proveer y controlar la corriente en el rotor necesaria para mantener el campo electromagntico en el entrehierro, en funcin de garantizar el valor de tensin en los terminales del generador de forma estable y constante; controlar la cantidad de potencia reactiva que absorbe o entrega la mquina. [1].
Una representacin esquemtica de los sistemas de control asociados a la unidad de generacin est conformada por el sistema de excitacin y de gobernacin; haciendo nfasis en el sistema de excitacin, como se muestra en la figura 2.8 est integrado por los siguientes elementos: el sensor de tensin, regulador de tensin, excitador y estabilizador de potencia.
Sensor de tensin es un elemento de medicin del valor de la tensin a la salida del generador, esta seal sirve de entrada al regulador de tensin para tomar la accin de control.
Regulador de tensin mediante la seal de referencia de la tensin en bornes controla de forma automtica o manual el valor de corriente en el rotor del generador.
Excitador es el elemento que se incorpora de manera fsica en el rotor para poder inyectar la corriente en el devanado del rotor.
Estabilizador de potencia permite amortiguar las oscilaciones de potencia influyendo en las ecuaciones dinmicas del generador con un torque amortiguador.
Circuitos Limitadores y de Proteccin estos incluyen un amplio rango de funciones de proteccin y control que aseguran que no sean excedidos los lmites de capacidad del generador y excitacin.
-
Figura 2.4.1. Esquemtico de
Transductor de tensin y circuito compensador de carga.La seal de error del sistema de excitacin se obtiene usualmente mediante la
comparacin del valor de referencia y el valor rectificatransductor de tensin y el rectificador es modelado simplemente por una cierta constante de tiempo con ganancia unitaria como se muestra en la figura Adicionalmente, se utiliza una impedancia de compensacin tensin por la corriente de carga, la magnitud de la tensin es modelada mediante la expresin que se muestra en siguiente figura.
Figura 2.4.2. Esquema transductor de tensin y circuito compensador de carga.
En el caso de impedancias de compensacin positivas permiten adicionar una cada de tensin, se utiliza en general para considerar la divisin de la potencia reactiva en generadores que comparten la misma barra y transformador elevador. En el caso de
Esquemtico de sistema de excitacin y gobernacin de una unidad de generacin
Transductor de tensin y circuito compensador de carga. seal de error del sistema de excitacin se obtiene usualmente mediante la
comparacin del valor de referencia y el valor rectificado de la seal controlada AC. El transductor de tensin y el rectificador es modelado simplemente por una cierta constante de tiempo con ganancia unitaria como se muestra en la figura Adicionalmente, se utiliza una impedancia de compensacin producto de la cada de la tensin por la corriente de carga, la magnitud de la tensin es modelada mediante la expresin que se muestra en siguiente figura.
Esquema transductor de tensin y circuito compensador de carga.
edancias de compensacin positivas permiten adicionar una cada de tensin, se utiliza en general para considerar la divisin de la potencia reactiva en generadores que comparten la misma barra y transformador elevador. En el caso de
23
sistema de excitacin y gobernacin de una unidad de generacin.
seal de error del sistema de excitacin se obtiene usualmente mediante la do de la seal controlada AC. El
transductor de tensin y el rectificador es modelado simplemente por una cierta constante de tiempo con ganancia unitaria como se muestra en la figura 2.4.2.
producto de la cada de la tensin por la corriente de carga, la magnitud de la tensin es modelada mediante la
Esquema transductor de tensin y circuito compensador de carga.
edancias de compensacin positivas permiten adicionar una cada de tensin, se utiliza en general para considerar la divisin de la potencia reactiva en generadores que comparten la misma barra y transformador elevador. En el caso de
-
impedancias de compensacin negativas para disminuir la cada de tensin producto del transformador elevador.
Regulador de tensinEl regulador de tensin permite amplificar la seal de error entre el valor de
referencia, el valor compensado de tensin y la tensin del estabipor lo tanto, se considera un elevado valor de ganancia Kcon sus respectivos limitadores Vroperacin; para evitar efectos en la ganancia producto de trfuncin de transferencia con constantes de tiempo Tpequeos, en algunos casos son despreciables.
Figura
Excitador de corriente directa DCLa seal del regulador debe ser adecuada a los valores necesarios de potencia
para excitar el devanado de campo de un generador sincrnico. El modelo del excitador DC representa el devanado de campo, la funcin no lineal del efecto magntico de la excitatriz principal y la armadura. Las tensiones inducidas en el campo y en la armadura producto de la corriente de campo son definidas mediante las siguientes ecuaciones.
Ecuacin 2.4.1. Ecuacin de tensin de campo y armadura vs. corriente de campo.
acin negativas para disminuir la cada de tensin producto del transformador elevador.
Regulador de tensin. El regulador de tensin permite amplificar la seal de error entre el valor de
referencia, el valor compensado de tensin y la tensin del estabilizador de potencia, por lo tanto, se considera un elevado valor de ganancia Ka y constante de tiempo Tcon sus respectivos limitadores Vrmax y Vrmin, definidos por la saturacin y capacidad de operacin; para evitar efectos en la ganancia producto de transitorios se utiliza una funcin de transferencia con constantes de tiempo Tb y Tc; estos valores son muy pequeos, en algunos casos son despreciables.
Figura 2.4.3. Esquema del regulador de tensin.
Excitador de corriente directa DC. lador debe ser adecuada a los valores necesarios de potencia
para excitar el devanado de campo de un generador sincrnico. El modelo del excitador DC representa el devanado de campo, la funcin no lineal del efecto magntico de la
armadura. Las tensiones inducidas en el campo y en la armadura producto de la corriente de campo son definidas mediante las siguientes ecuaciones.
"* = *%* + )B**) "C = * , C Ecuacin de tensin de campo y armadura vs. corriente de campo.
24
acin negativas para disminuir la cada de tensin producto
El regulador de tensin permite amplificar la seal de error entre el valor de lizador de potencia,
y constante de tiempo Ta, , definidos por la saturacin y capacidad de
ansitorios se utiliza una ; estos valores son muy
lador debe ser adecuada a los valores necesarios de potencia para excitar el devanado de campo de un generador sincrnico. El modelo del excitador DC representa el devanado de campo, la funcin no lineal del efecto magntico de la
armadura. Las tensiones inducidas en el campo y en la armadura producto de la corriente de campo son definidas mediante las siguientes ecuaciones.
Ecuacin de tensin de campo y armadura vs. corriente de campo.
-
El valor de la tensin de armadura es una funcin no lineal que depende de la curva magnetizacin del estator y se representa mediante la funcin Ssaturacin.
Ecuacin 2.
Figura 2.4.4.
Sustituyendo la ecuacin de la corriente de campo Ec. 2.campo Ec. 2.4.1., obtenemos,
= >Ecuacin 2.4.3. Ecuacin de tensin de campo en funcin de la tensin de armadura.
Considerando, los valores en por unidad con un valor base de la corrientes de campo Vxbase/Rag, se tiene que
"*78 =
El valor de la tensin de armadura es una funcin no lineal que depende de la curva magnetizacin del estator y se representa mediante la funcin S
* = "C>;+ + D"C D = ECFGHIJKJ 2.4.2. Ecuacin de corriente de campo y de saturacin
.
. Curva de magnetizacin de un generador sincrnico.
Sustituyendo la ecuacin de la corriente de campo Ec. 2.4.2 en la de tensin de ., obtenemos,
"* = L %*>;+ + D*%*M "C + )B*"C) %*>;+ /1 + >;+D*%*0"C + )B*"C)"C )"C) . Ecuacin de tensin de campo en funcin de la tensin de armadura.
Considerando, los valores en por unidad con un valor base de la corrientes de , se tiene que *78 = "C78 + >;+D*"C 78
= %*>;+ /1 + >;+D*0"C78 + )B*"C)"C )"C78)
25
El valor de la tensin de armadura es una funcin no lineal que depende de la curva magnetizacin del estator y se representa mediante la funcin Se el efecto de
Ecuacin de corriente de campo y de saturacin
Curva de magnetizacin de un generador sincrnico.
en la de tensin de
. Ecuacin de tensin de campo en funcin de la tensin de armadura.
Considerando, los valores en por unidad con un valor base de la corrientes de
-
"*78"*78 =
Ecuacin 2.4.4. Ecuacin de tensin de campo en funcin de la tensin de armadura en por unidad.
Ecuaci
De acuerdo a las ecuaciones de la tensin de campo, se tiene dos funciones de transferencia dependiendo, como se muestra en la siguiente figura.
Figura 2.
Estabilizador. La funcin principal del estabilizador es mejorar la respuesta en frecuencia del
lazo abierto del regulador y excitador, compensado las del excitador y reforzando el amortiguamiento negativo introducido por una alta respuesta inicial del sistema de excitacin en operacin en lnea. Una similar reduccin de la ganancia durante el perodo transitorio, puede ser ode adelanto - atraso, considerado en el regulador con las constantes de tiempo Tb y Tc como se muestra en la siguiente figura.
*78 = %*>;+ /1 + D78"C780"C78 + NO )"C78) = LPO + %*>;+ D78,"C78-M "C78 + NO )"C78)
. Ecuacin de tensin de campo en funcin de la tensin de armadura en por unidad.
D78 = *78 "C78 >;+"C78 >;+ = E RR NO = )B*"C)"C = )B*"C78)"C78 PO = %*>;+ DO = %*>;+ D78,"C78-
Ecuacin 2.4.5. Constantes del excitador DC.
De acuerdo a las ecuaciones de la tensin de campo, se tiene dos funciones de do, como se muestra en la siguiente figura.
2.4.5. Funcin de transferencia del excitador DC.
La funcin principal del estabilizador es mejorar la respuesta en frecuencia del lazo abierto del regulador y excitador, compensado las grandes constantes de tiempo del excitador y reforzando el amortiguamiento negativo introducido por una alta respuesta inicial del sistema de excitacin en operacin en lnea. Una similar reduccin de la ganancia durante el perodo transitorio, puede ser obtenida mediante un circuito
atraso, considerado en el regulador con las constantes de tiempo Tb y Tc como se muestra en la siguiente figura.
26
. Ecuacin de tensin de campo en funcin de la tensin de armadura en por unidad.
De acuerdo a las ecuaciones de la tensin de campo, se tiene dos funciones de
La funcin principal del estabilizador es mejorar la respuesta en frecuencia del grandes constantes de tiempo
del excitador y reforzando el amortiguamiento negativo introducido por una alta respuesta inicial del sistema de excitacin en operacin en lnea. Una similar reduccin
btenida mediante un circuito atraso, considerado en el regulador con las constantes de tiempo Tb y Tc
-
Figura 2.
Rectificador. La caracterstica de
fuente de corriente alterna, se presenta en tres modos:
En el modo 1, dos o tres diodos conducen alternativamente, tres cuando se realiza la conmutacin, el ngulo de retraso alfa, y el nguloincrementa desde 0 hasta 60. Los valores de corri ente de salida Idesde 0 hasta Is2, donde Iconmutacin, en el caso de la tensin la tensin promedio de salida de cdisminuye linealmente desde el valor en circuito abierto VConsiderando, el valor pico de la tensin de corriente alterna Vdado por la siguiente ecuacin.
Ecuacin 2.4.6. Ecuaciones de la tensin de salida del rectificador en el modo 1.
Donde la resistencia de conmutacin Res 33@9 T , @9 es la inductancia del lado de corriente alterna del puente rectificador.
En el modo 2 los tres diodos siempre estn conduciendo, el ngulo de retardo se incrementa de 0 hasta 30, el ngulo de conmutaci n se mantiene en 60, el valor de Id se incrementa desde Udisminuye desde 0.75 = ecuacin:
2.4.6. Funcin de transferencia del excitador DC.
La caracterstica de operacin del puente rectificador trifsico alimentado por una fuente de corriente alterna, se presenta en tres modos:
En el modo 1, dos o tres diodos conducen alternativamente, tres cuando se realiza la conmutacin, el ngulo de retraso alfa, y el ngulo de conmutacin u incrementa desde 0 hasta 60. Los valores de corri ente de salida Id
, donde Is2 es el valor de cortocircuito durante el proceso de conmutacin, en el caso de la tensin la tensin promedio de salida de cdisminuye linealmente desde el valor en circuito abierto VdoConsiderando, el valor pico de la tensin de corriente alterna Vs, el valor de Vdado por la siguiente ecuacin.
= = 33T = = = = >9U Ecuaciones de la tensin de salida del rectificador en el modo 1.
Donde la resistencia de conmutacin Rc, de un puente rectificador de seis pulsos es la inductancia del lado de corriente alterna del puente rectificador.
En el modo 2 los tres diodos siempre estn conduciendo, el ngulo de retardo se incrementa de 0 hasta 30, el ngulo de conmutaci n se mantiene en 60, el valor de U 2 hasta 3U 2 , la tensin de salida de corriente directa
hasta 3 = 4 , de forma no lineal mediante la siguiente
27
operacin del puente rectificador trifsico alimentado por una
En el modo 1, dos o tres diodos conducen alternativamente, tres cuando se de conmutacin u en el modo 1 van
es el valor de cortocircuito durante el proceso de conmutacin, en el caso de la tensin la tensin promedio de salida de corriente directa,
do hasta 0,75Vdo. , el valor de Vdo viene
Ecuaciones de la tensin de salida del rectificador en el modo 1.
, de un puente rectificador de seis pulsos es la inductancia del lado de corriente alterna del puente rectificador.
En el modo 2 los tres diodos siempre estn conduciendo, el ngulo de retardo se incrementa de 0 hasta 30, el ngulo de conmutaci n se mantiene en 60, el valor de
, la tensin de salida de corriente directa
, de forma no lineal mediante la siguiente
-
Ecuacin 2.4.7. Ecuacin de la tensin de salida del rectificador en el modo 2.
En el modo 3, tres y cuatro diodos del puente estn calternativamente, el ngulo de retardo se mantiene en 30, el ngulo de conmutacin se incrementa de 60 hasta 120, el valor de Id se inc rementa desde
la tensin de salida de corriente directa disminuye desde
Figura 2.4.7
Funciones de control y proteccin.Es importante considerar que un sistema de excitacin moderno considera un
conjunto de elementos adicionalescaractersticas o filosofa de proteccin del generador; as como, el de proteccin de cortocircuito en el campo para sistemas de excitacin esttica, tal como se muestra en la siguiente figura.
= = 3= 2 [1 \2]9U 3= ^
Ecuacin de la tensin de salida del rectificador en el modo 2.
En el modo 3, tres y cuatro diodos del puente estn calternativamente, el ngulo de retardo se mantiene en 30, el ngulo de conmutacin se incrementa de 60 hasta 120, el valor de Id se inc rementa desde 3la tensin de salida de corriente directa disminuye desde 3 = 4 has
4.7. Caracterstica de salida del puente rectificador.
Funciones de control y proteccin. Es importante considerar que un sistema de excitacin moderno considera un
adicionales al regulador de tensin, tales como limitadores con caractersticas o filosofa de proteccin del generador; as como, el de proteccin de cortocircuito en el campo para sistemas de excitacin esttica, tal como se muestra en
28
Ecuacin de la tensin de salida del rectificador en el modo 2.
En el modo 3, tres y cuatro diodos del puente estn conduciendo alternativamente, el ngulo de retardo se mantiene en 30, el ngulo de conmutacin se 3U 2 hasta 2U 3 ,
hasta 0.
Es importante considerar que un sistema de excitacin moderno considera un al regulador de tensin, tales como limitadores con
caractersticas o filosofa de proteccin del generador; as como, el de proteccin de cortocircuito en el campo para sistemas de excitacin esttica, tal como se muestra en
-
Figura 2.4.8. Funciones de control y proteccin del sistema de excitacin
Circuito de cortocircuito del devanado de campoexcitacin de corriente alterna estticos, debido a que los semiconductores no pueden conducir en forma inversa, la corriente del excitador no puede ser negativa. Si no se provee de un camino para dirigir este flujo de corriente negativa, puede ocurrir sobretensiones en el campo, por lo tanto, se crea un camino para conducir esta corriente negativa utilizandoy una resistencia de descarga.
Limitador y proteccin de V/Hz setransformador elevador de tensin de daos debido a flujos magnticos excesivos derivados de bajas frecuencias y/o sobretensiones. El flujo magntico excesivo de manera sostenida produce un calentamiento que puede resultar en daos, la medicin de la tensin y la frecuencia en valores en por unidad, est relacionada con el valor del flujo magntico, por lo tanto la tensin de salida del generador es controlada por la tensin de campo.
Funciones de control y proteccin del sistema de excitacin
Circuito de cortocircuito del devanado de campo es utilizado en sistema de excitacin de corriente alterna estticos, debido a que los semiconductores no pueden
nversa, la corriente del excitador no puede ser negativa. Si no se provee de un camino para dirigir este flujo de corriente negativa, puede ocurrir sobretensiones en el campo, por lo tanto, se crea un camino para conducir esta corriente negativa utilizando un circuito denominado crowbar conformado por un tiristor y una resistencia de descarga.
Limitador y proteccin de V/Hz se utiliza para proteger el generador y el transformador elevador de tensin de daos debido a flujos magnticos excesivos
de bajas frecuencias y/o sobretensiones. El flujo magntico excesivo de manera sostenida produce un calentamiento que puede resultar en daos, la medicin de la tensin y la frecuencia en valores en por unidad, est relacionada con el valor del
tico, por lo tanto la tensin de salida del generador es controlada por la
29
Funciones de control y proteccin del sistema de excitacin.
es utilizado en sistema de excitacin de corriente alterna estticos, debido a que los semiconductores no pueden
nversa, la corriente del excitador no puede ser negativa. Si no se provee de un camino para dirigir este flujo de corriente negativa, puede ocurrir sobretensiones en el campo, por lo tanto, se crea un camino para conducir esta
conformado por un tiristor
utiliza para proteger el generador y el transformador elevador de tensin de daos debido a flujos magnticos excesivos
de bajas frecuencias y/o sobretensiones.