
Optimización de Sistemas de Control Difuso para Robots Autónomos Móviles
43
Trabajo de Tesis de la O, Castillo, Mel´ endez Introducci´on Antecedentes Objetivos General Espec´ ıficos Justificaci´on Metas MarcoTe´orico L´ogicaDifusa Conjunto Difuso Sistemas Difusos Optimizaci´on mediante Nubes de Part´ ıculas (PSO) Propuesta Cronograma Referencias Optimizaci´ on de Sistemas de Control Difuso para Robots Aut´ onomos M´ oviles Trabajo de Tesis Tesista: Ing. David Salom´ on de la O Hidalgo Director: Dr. Oscar Castillo L´ opez Instituto Tecnol´ ogico de Tijuana 27 de Febrero del 2013
-
Upload
david-de-la-o -
Category
Documents
-
view
433 -
download
1
Transcript of Optimización de Sistemas de Control Difuso para Robots Autónomos Móviles
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Optimizacion de Sistemas de Control Difusopara Robots Autonomos Moviles
Trabajo de Tesis
Tesista: Ing. David Salomon de la O HidalgoDirector: Dr. Oscar Castillo Lopez
Instituto Tecnologico de Tijuana
27 de Febrero del 2013

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Introduccion
Los origenes de los sistemas difusos se remontan a la decada delos 60’s, con el desarrollo de un nuevo concepto llamado logicadifusa, sin embargo su aplicacion radica fundamentalmente, enel diseno de sistemas de control difusos que a partir de ladecada de los ochentas y de los noventa han demostrado sugran versatilidad en la resolucion de una gran cantidad deproblemas de nuestras actividades diarias, desde el control delmezclado en una fabrica, pasando por el control de frenado desistemas de transporte, hasta el control de calidad de limpiezaen una lavadora.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Introduccion
El uso de robots moviles se ha incrementado en las ultimasdecadas en muchas areas tanto como trabajo industrial, lainvestigacion y del hogar.El robot movil, necesita moverse alrededor de su entorno es poreso que una gran cantidad de investigacion se ha invertido enuna prueba con sistemas de control que permiten a los robotsnavegar por su cuenta.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Introduccion
PSO es una de las metaheurısticas mas usadas paraoptimizacion con parametros reales. Esto es debido a lassiguientes ventajas:
(1) es muy sencillo de implementar,
(2) converge mas rapido que los Algoritmos Evolutivos enalgunos problemas y
(3) tiene un mejor desempeno en algunos casos del queproveen los Algoritmos Evolutivos.Ademas, se han propuesto varias versiones nuevas y, lascuales optimizan problemas multiobjetivo.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Antecedentes
[1] P. Melin and O. Castillo, “Intelligent control of aircraft dynamicsystems with a new hybrid neuro-fuzzy fractal approach,” inf. Sci.,vol. 142, no. 1-4, pp. 161-175, 2002.
[2] A. Melendez, Castillo O. , and Soria J. , “Reactive Control of aMobile Robot in a Distributed Environment Using Fuzzy Logic,” inFuzzy Information Processing Society, New York, 2008.
[3] A. Melendez, Castillo O. , and Soria J. , “Reactive and TrackingControl of a Mobile Robot in a Distributed Environment Using FuzzyLogic,” in Fuzzy Systems (FUZZ), IEEE International Conference,Madrid, 2010.
[4] L. Aguilar, P. Melin, and O. Castillo, “Intelligent Control of a
stepping motor drive using a hybrid neuro-fuzzy ANFIS approach,”
Appl Soft Comput, pp. 209-219, 2003.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Objetivo General
Desarrollar un algoritmo multi-objetivo con base en lametaheurıstica conocida como nube de partıculas, para laoptimizacion de parametros del Sistemas de Control Difuso,para la navegacion de Robots Autonomos Moviles.
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Objetivos Especıficos
Disenar un Algoritmo PSO para la Optimizacion delControl Difuso de Seguimiento.
Disenar un Algoritmo PSO para la Optimizacion delControl Difuso Reactivo.
Disenar un Algoritmo PSO para la Optimizacion delControl Difuso Integrador.
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Justificacion
En muchas de las actividades que realizamos diariamente existeuna gran cantidad de problemas de optimizacion para los cualeslos metodos matematicos no pueden garantizar que lasolucion obtenida sea optima y, en muchos de ellos, ni siquierapueden aplicarse. En dichos problemas la alternativa viable sonlas metaheurısticas. De las diversas metaheurısticas que existenen la actualidad, los algoritmos PSO se cuentan entre los maspopulares debido a su facilidad de implementacion y su eficacia.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Metas
Publicar al menos un articulo de libro o en revistaindexada.
Prototipo de Optimizacion de parametros para unSistemas de Control Difuso de Robots Autonomos Moviles.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Logica Difusa
Se ha considerado de manera general que el concepto de logicadifusa aparecio en 1965, en la Universidad de California enBerkeley, introducido por Lotfi A. Zadeh[38]. La logica difusa,es esencialmente logica multivaluada que extienden a la logicaclasica(falso o verdadero), que utiliza conceptos absolutoscuando se refiere al mundo real, la logica difusa define estosconceptos en un grado variable de pertenencia, siguiendopatrones de razonamiento de los del pensamiento humano. Elrazonamiento humano utiliza valores de verdad que nonecesariamente son “tan deterministas”. Sus aplicaciones, vandesde el control de complejos procesos industriales, disenodispositivo para controlar la electronica del hogar y elentretenimiento, ası como los sistemas de diagnostico.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Conjunto Difuso
Un conjunto difuso en un universo dado o conjunto universal Use caracteriza por una funcion de membrecıa que puede tomartodos los valores reales en el intervalo [0, 1]. [1]
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
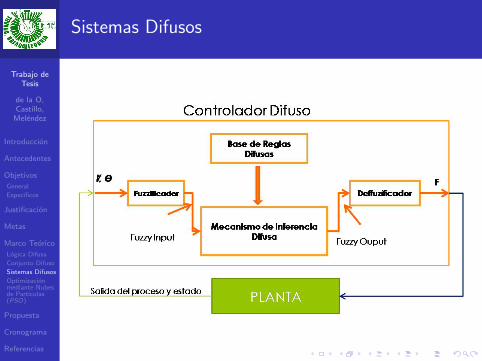
Sistemas Difusos
El sistema de inferencia difusa es una estructura computacionalmuy popular basada en los conceptos de la teorıa difusa, enreglas del tipo si-entonces y en metodos de inferencia difusa.Los sistemas de inferencia difusa, actualmente han encontradodiversas aplicaciones exitosas dentro de una gran variedad deareas tales como el control automatico, la clasificacion dedatos, el analisis de decisiones, los sistemas expertos, laprediccion de series de tiempo, la robotica y en elreconocimiento de patrones. A causa de su naturalezamultidisciplinaria, los sistemas de inferencia difusa sonconocidos como sistemas experto, modelos difusos,controladores logicos difusos o simplemente como sistemasdifusos.
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Sistemas Difusos
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Optimizacion mediante Nubes de Partıculas (PSO)
Kennedy y Eberhart [1995] propusieron la Optimizacionmediante Cumulos de Partıculas PSO, que es un algoritmo debusqueda basado en la simulacion del comportamiento socialde los pajaros dentro de una parvada. En PSO, los individuos,llamados partıculas vuelan a traves de un espacio de busquedamultidimensional. Los cambios a la posicion de las partıculasdentro del espacio de busqueda se basan en la tendenciasocio-psicologica de los individuos a emular el exito de otrosindividuos.
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
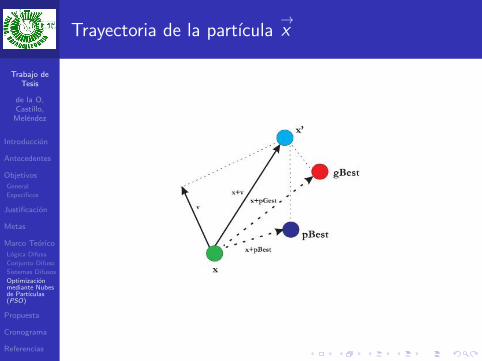
Optimizacion mediante Nubes de Partıculas (PSO)
Un nubes consiste en un conjunto de partıculas, donde cadapartıcula representa una solucion potencial al problema. Laposicion de cada partıcula cambia de acuerdo a su propia
experiencia y a la de sus vecinos. Sea→x i (t) que denota la
posicion de la partıcula pi , en el tiempo t. La posicion de pi
cambia al agregarse una velocidad→v i (t):
→x i (t + 1) =
→x i (t)+
→v i (t + 1)
→x Vector de posicion→v Vector de velocidad
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Optimizacion mediante nubes de Partıculas (PSO)
El vector velocidad conduce el proceso de optimizacion y reflejala informacion intercambiada socialmente (factores sociales ycognitivos).
vij (t+1) = vij (t)+c1r1j (t)[yij (t)−xij (t)]+c2r2j (t)[yij (t)−xij (t)]
donde:yi es la mejor particula del vencindarioc1r1 componente cognitivo, representa la distancia entre laposicion actual y la mejor conocida por esa partıculac2r2 componente social, representa la distancia entre laposicion actual y la mejor posicion del vecindario
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Trayectoria de la partıcula→x

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Optimizacion mediante nubes de Partıculas (PSO)
Pseudocodigo de PSO
Empezar.Generar aleatoriamente un nube inicial de soluciones.Calcular la aptitud del nube inicial.Repetir.Seleccionar al lıder (o lıderes del cumulo).Para cada partıcula, actualizar la posicion (vuelo).Evaluar cada partıcula.Actualizar el pbest de cada partıcula.
Hasta que se satisfaga una condicion de paro.Fin.
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Optimizacion mediante nubes de Partıculas (PSO)
Pseudocodigo de PSO
Empezar.Generar aleatoriamente un nube inicial de soluciones.Calcular la aptitud del nube inicial.Repetir.Seleccionar al lıder (o lıderes del cumulo).Para cada partıcula, actualizar la posicion (vuelo).Evaluar cada partıcula.Actualizar el pbest de cada partıcula.
Hasta que se satisfaga una condicion de paro.Fin.

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Bases
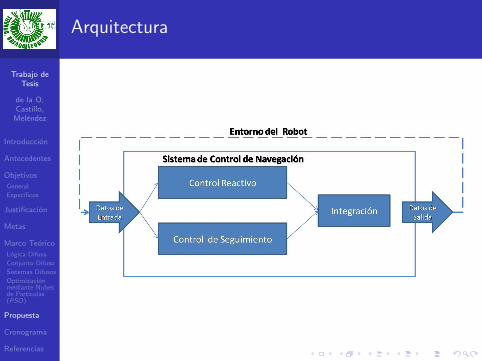
Tomaremos como base la propuesta[2] siguiente:
Controlador reactivo
Controlador de seguimiento
Integracion de los controladores implementado unaintegracion por pesos difusos (WFIS).

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Bases
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
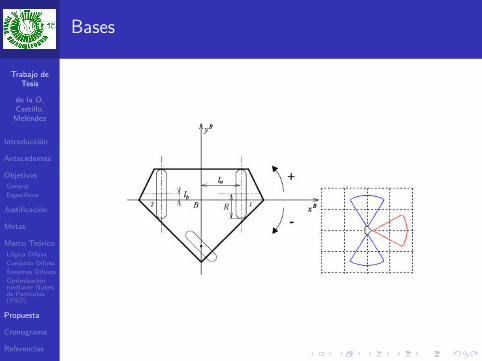
Bases
El robot se basa en la descripcion de la Toolbox de simulacionpara robots moviles[3], un robot con ruedas moviles, consta deuna rueda convencional, dirigida sin actuador y no sensada, ydos ruedas convencionales, con actuador, y sensada.
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Bases
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Arquitectura
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Arquitectura

Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
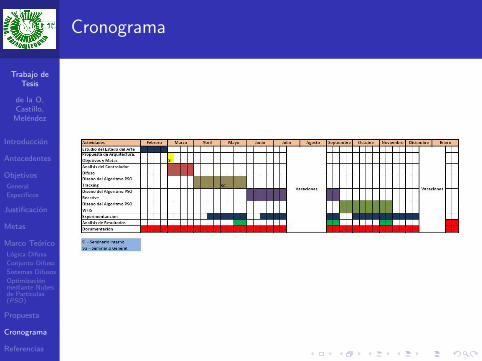
Cronograma
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Indice
1 Introduccion
2 Antecedentes
3 ObjetivosGeneralEspecıficos
4 Justificacion
5 Metas
6 Marco TeoricoLogica DifusaConjunto DifusoSistemas DifusosOptimizacion mediante Nubes de Partıculas (PSO)
7 Propuesta
8 Cronograma
9 Referencias
Trabajo deTesis
de la O,Castillo,
Melendez
Introduccion
Antecedentes
Objetivos
General
Especıficos
Justificacion
Metas
Marco Teorico
Logica Difusa
Conjunto Difuso
Sistemas Difusos
Optimizacionmediante Nubesde Partıculas(PSO)
Propuesta
Cronograma
Referencias
Referencias
[1] P. Melin and O. Castillo, “Intelligent control of aircraft dynamic systems witha new hybrid neuro-fuzzy fractal approach,” inf. Sci., vol. 142, no. 1-4, pp.161-175, 2002.
[2] A. Melendez, Castillo O. , and Soria J. , “Reactive Control of a Mobile Robotin a Distributed Environment Using Fuzzy Logic,” in Fuzzy InformationProcessing Society, New York, 2008.
[3] A. Melendez, Castillo O. , and Soria J. , “Reactive and Tracking Control of aMobile Robot in a Distributed Environment Using Fuzzy Logic,” in FuzzySystems (FUZZ), IEEE International Conference, Madrid, 2010.
[4] L. Aguilar, P. Melin, and O. Castillo, “Intelligent Control of a stepping motordrive using a hybrid neuro-fuzzy ANFIS approach,” Appl Soft Comput, pp.209-219, 2003.
[5] Melendez, A., (2012). Optimizacion de Sistemas de Control Difuso Tipo-2para Robots Autonomos Moviles. Tesis de Doctorado no publicada, InstitutoTecnologico de Tijuana, Tijuana, BC, Mexico.
[6] Measurement and Instrumentation, Faculty of Electrical Engineering andComputer Science, Brno University of Technology, Czech Republic Department ofcontrol. (2001, June) Autonomous Mobile Robotics ToolboxFor Matlab 5.[Online].
![Análisis del comportamiento de robots móviles autónomos en ...vehículos de Braitenberg [5], quien diseña una serie de vehículos los cuales mediante una serie de conexiones excitadoras](https://static.fdocuments.ec/doc/165x107/5e9fcfa4f184c061f42b19a4/anlisis-del-comportamiento-de-robots-mviles-autnomos-en-vehculos-de.jpg)

















