Movimiento Oscilatorio - santoti.files.wordpress.com · Cuando se perturba un sistema y éste...
28
1 Movimiento Oscilatorio 1. Introducción. 2. El Movimiento Armónico Simple. a) Estudio cinemático. b) Estudio dinámico. c) Estudio energético. 3. Péndulos. a) Péndulo simple. b) Péndulo físico. 4. Oscilaciones amortiguadas. a) Energía del oscilador amortiguado. 5. Oscilaciones forzadas. Resonancia.
Transcript of Movimiento Oscilatorio - santoti.files.wordpress.com · Cuando se perturba un sistema y éste...

1
Movimiento Oscilatorio
1. Introducción.
2. El Movimiento Armónico Simple.
a) Estudio cinemático.
b) Estudio dinámico.
c) Estudio energético.
3. Péndulos.
a) Péndulo simple.
b) Péndulo físico.
4. Oscilaciones amortiguadas.
a) Energía del oscilador amortiguado.
5. Oscilaciones forzadas. Resonancia.
Cuando se perturba un sistema y éste pierde su posición de equilibrio, se produce una oscilación o vibración. Hay muchos ejemplos familiares en los que podemos observar este tipo de movimiento. Casos representativos son el movimiento que describe el péndulo de un reloj o el que se observa en un objeto colgado de un muelle o resorte.
Esencialmente se trata de un movimiento de vaivén alrededor de un punto fijo o punto de equilibrio. Este movimiento puede ser regular en dirección y frecuencia o aleatorio, que es lo más frecuente.
De todos los movimientos oscilatorios, el más importante es el movimiento armónico simple (MAS) o movimiento vibratorio armónico. Además de ser el más sencillo de describir y analizar, es representativo de otras muchas oscilaciones que se observan en la naturaleza. Por eso, la mayor parte de nuestro estudio se centrará en este tipo de movimiento.
1.- Introducción

3
2a.- Cinemática del Movimiento Armónico Simple (I)
Un movimiento armónico simple, como el que realiza el sistema de la figura adjunta puede describirse por una ecuación del tipo:
( )cos ωx A t ϕ= +
Donde A, ω y θ son constantes características del movimiento. Los parámetros que caracterizan a este movimiento son los siguientes:
• x (elongación) → es la posición que ocupa el móvil en cada instante, medida desde la posición de equilibrio.
• A (amplitud) → es el máximo desplazamiento respecto a la posición de equilibrio, es decir, es la máxima elongación.
• T (periodo) → es el tiempo que tarda el móvil en realizar una oscilación completa.
• f (frecuencia) → es el número de oscilaciones que realiza el móvil es la unidad de tiempo y se mide en hercios (Hz) en el S.I.
4
2a.- Cinemática del Movimiento Armónico Simple (II)
De la propia definición se desprende que periodo y frecuencia están relacionados por:
1f
T=
La frecuencia angular, ω, puede relacionarse con el periodo o con la frecuencia mediante las expresiones:
2ω o bien ω 2 f
T
ππ= =
Finalmente, el término φ se conoce como fase inicial o corrección de fase, y nos da información acerca de la posición inicial del móvil, es decir, de la posición cuando el tiempo, t, vale cero:
0Obsérvese que cuando 0t x A ϕ= ⇒ = cos
El término (ω t + φ) recibe el nombre de ángulo de fase o simplemente fase del M.A.S., donde ω es una característica del M.A.S. que se llama pulsación o frecuencia angular.
5
2a.- Cinemática del Movimiento Armónico Simple (III)
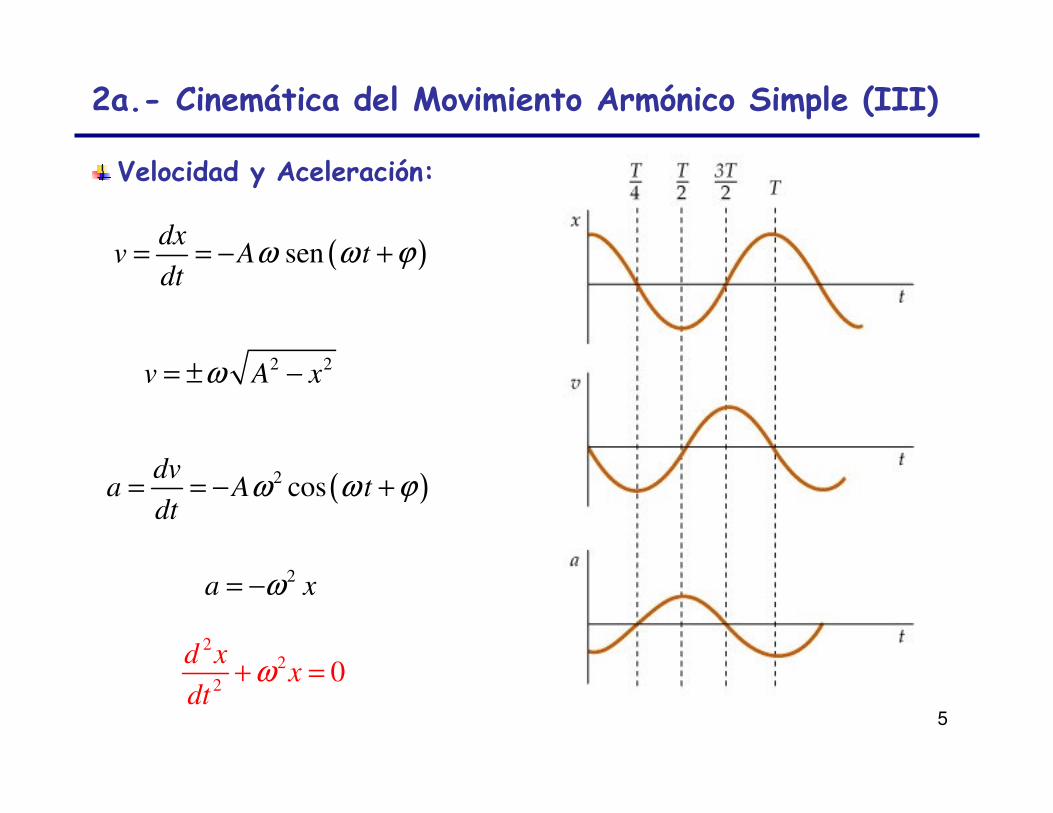
Velocidad y Aceleración:
( )sendx
v A tdt
ω ω ϕ= = − +
2 2v A xω= ± −
( )2 cosdv
a A tdt
ω ω ϕ= = − +
2a xω= −
22
20
d xx
dtω+ =

6
2a.- Cinemática del Movimiento Armónico Simple (IV)
En 1610 Galileo descubrió las cuatro lunas de Júpiter. Cada luna parecía moverse para
delante y para detrás en lo que llamaríamos un movimiento armónico. Lo que realmente
estaba viendo Galileo era un movimiento circular descrito por cada luna, pero lo estaba
observando de perfil. Podemos utilizar lo que Galileo experimentaba para describir algunas
propiedades del movimiento armónico simple utilizando un paralelismo con el movimiento
circular uniforme
En 1610 Galileo descubrió las cuatro lunas de Júpiter. Cada luna parecía moverse para delante y para detrás en lo que llamaríamos un movimiento armónico. Lo que realmente estaba viendo Galileo era un movimiento circular descrito por cada luna, pero lo estaba observando de perfil. Podemos utilizar lo que Galileo experimentaba para describir algunas propiedades del movimiento armónico simple utilizando un paralelismo con el movimiento circular uniforme.
7
Ejemplo 1.
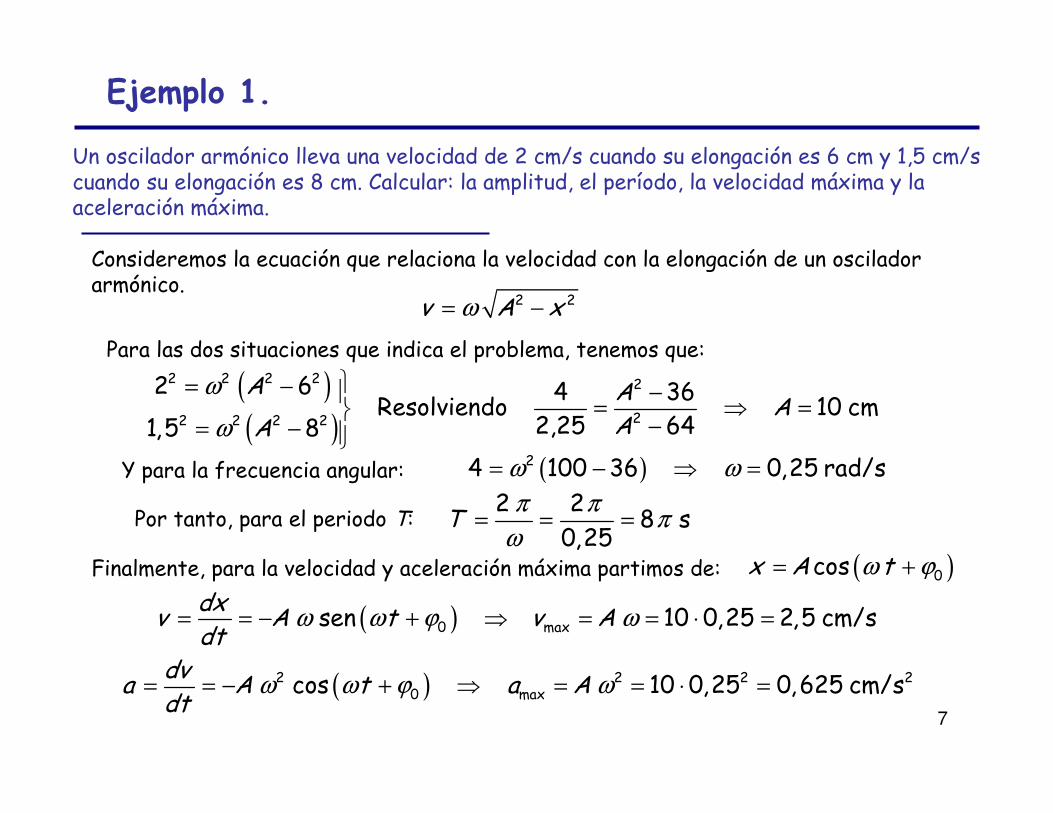
Un oscilador armónico lleva una velocidad de 2 cm/s cuando su elongación es 6 cm y 1,5 cm/s cuando su elongación es 8 cm. Calcular: la amplitud, el período, la velocidad máxima y la aceleración máxima.
Consideremos la ecuación que relaciona la velocidad con la elongación de un oscilador armónico.
2 2v A xω= −
Para las dos situaciones que indica el problema, tenemos que:
( )( )
2 2 2 2 2
22 2 2 2
2 6 4 36Resolviendo 10 cm
2,25 641,5 8
A AA
AA
ω
ω
= − −= ⇒ =
−= − Y para la frecuencia angular: ( )24 100 36 0,25 rad/sω ω= − ⇒ =
Por tanto, para el periodo T:2 2
8 s0,25
Tπ π
πω
= = =
( )0 maxsen 10 0,25 2,5 cm/sdx
v A t v Adt
ω ω ϕ ω= = − + ⇒ = = ⋅ =
( )2 2 2 20 maxcos 10 0,25 0,625 cm/s
dva A t a A
dtω ω ϕ ω= = − + ⇒ = = ⋅ =
Finalmente, para la velocidad y aceleración máxima partimos de: ( )0cosx A tω ϕ= +

8
2b.- Dinámica del Movimiento Armónico Simple (I)
Según hemos visto:2
a xω= −
¿Qué fuerza puede producir esa aceleración? De acuerdo con la ecuación fundamental de la dinámica, podemos escribir:
2F ma F ma m x k xω= ⇒ = = − = −�
�
Donde las dos constantes, m y ω2, la hemos englobado en una sola, k. Obsérvese que la fuerza que hemos obtenido es del tipo del que establece la ley de Hooke, es decir, una fuerza de recuperación elástica, análoga a la que se produce en un sistema masa-resorte cuando se separa la masa de la posición de equilibrio.
Ya que: 2 o =k
k mm
ω ω=
El periodo de oscilación de la masa será:
2m
Tk
π=NOTA: Observe que x es la distancia de separación de la masa m respecto a la posición de equilibrio.
9
Ejemplo 2.
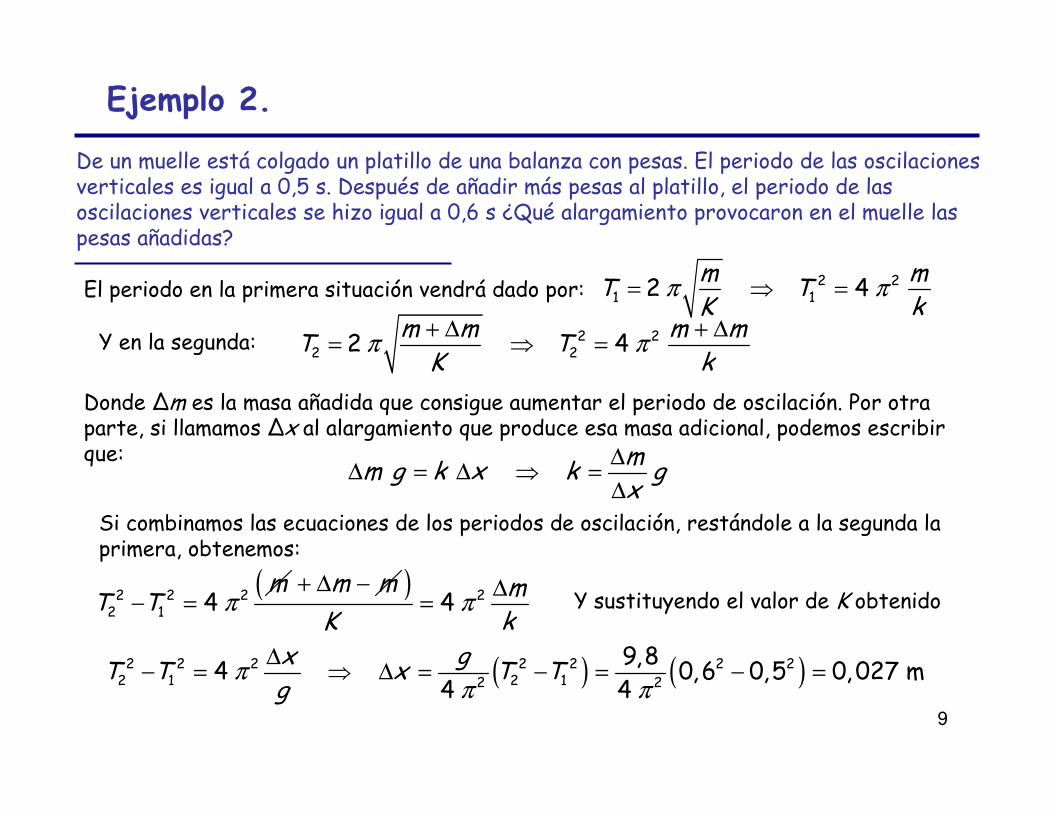
De un muelle está colgado un platillo de una balanza con pesas. El periodo de las oscilaciones verticales es igual a 0,5 s. Después de añadir más pesas al platillo, el periodo de las oscilaciones verticales se hizo igual a 0,6 s ¿Qué alargamiento provocaron en el muelle las pesas añadidas?
El periodo en la primera situación vendrá dado por: 2 21 12 4
m mT T
K kπ π= ⇒ =
Y en la segunda: 2 22 22 4
m m m mT T
K kπ π
+ ∆ + ∆= ⇒ =
Donde ∆m es la masa añadida que consigue aumentar el periodo de oscilación. Por otra parte, si llamamos ∆x al alargamiento que produce esa masa adicional, podemos escribir que: m
m g k x k gx
∆∆ = ∆ ⇒ =
∆
Si combinamos las ecuaciones de los periodos de oscilación, restándole a la segunda la primera, obtenemos:
2 2 22 1 4
mT T π− =
m m+ ∆ −( ) 24m
K kπ
∆= Y sustituyendo el valor de K obtenido
( ) ( )2 2 2 2 2 2 22 1 2 12 2
9,84 0,6 0,5 0,027 m
4 4
gxT T x T T
gπ
π π
∆− = ⇒ ∆ = − = − =

10
2c.- Energía del Movimiento Armónico Simple (I)
La energía cinética de una partícula animada por un M.A.S. vendrá dada por:
{ } ( )2 2 2 2 2 21 1
2 2cE mv v A x m A xω ω= = = ± − = −
Mientras que la energía potencial puede obtenerse a partir de:
{ }2 2 2 2
0 0 0
1 1
2 2
U x x
dU F dx U k x dx k x k m m xω ω= − ⇒ = − − = = = =∫ ∫ ∫Por tanto, la energía mecánica será:
( )2 2 2 2 2 2 2
M C
1 1 1
2 2 2E E U m A x m x m Aω ω ω= + = − + =
O bien: 2
M
1
2E k A=
La energía mecánica es pues CONSTANTE, como era de esperar dado el carácter conservativo de la fuerza de recuperación elástica responsable del movimiento.

11
2c.- Energía del Movimiento Armónico Simple (II)
EC
-A A0 x
U(x)
EMecánica
EC
(máx
ima)
U

12
3.1.- El péndulo simple
Se trata de una partícula suspendida de un hilo inextensible y sin masa.
La fuerza que causa el movimiento oscilatorio es la componente tangencial de la fuerza peso:
T senF mg φ= −
Donde el signo menos se debe al hecho de que la fuerza siempre está dirigida en sentido opuesto al desplazamiento. Así, tenemos que:
2
2sen sen
d smg ma g
dtφ φ− = ⇒ =
De donde, considerando que: s Lφ=
2 2
2 2
d s dL
dt dt
φ= Es decir:
2
2sen
d g
Ldt
φφ= −
Para ángulos pequeños: senφ φ≈ Por tanto:2
2
d g
Ldt
φφ= −
Donde:2 g
Lω = Y, por consiguiente 2
LT
gπ=

13
3.2.- El péndulo físico
Es un sistema formado por un sólido rígido suspendido de un eje fijo que no pasa por su CM.
Al separar el sólido de su posición de equilibrio un cierto ángulo aparece un momento recuperador que tiende a llevar de nuevo al sólido a su posición de equilibrio. Este momento es:
senM m g d φ= −
Teniendo en cuenta la ecuación fundamental de la dinámica de rotación:
2
2
dM I I
dt
φα= =
De donde:2
2sen
d m g d
Idt
φφ= − Para desplazamientos pequeños
2
2
d m g d
Idt
φφ= − Y, por tanto:
m g d
Iω = cuyo periodo es: 2
IT
m g dπ=
Note que el momento de inercia que aparece en la ecuación del periodo se refiere al momento de inercia respecto al eje de rotación real del sólido.
14
Ejemplo 3.
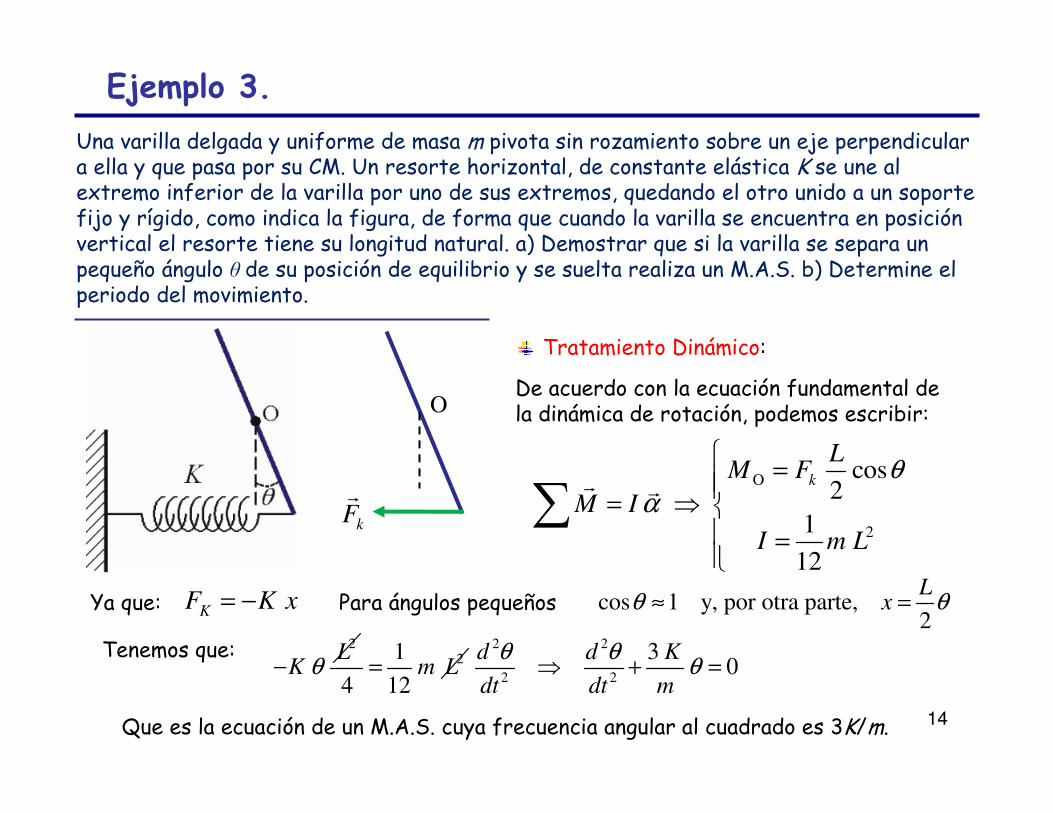
Una varilla delgada y uniforme de masa m pivota sin rozamiento sobre un eje perpendicular a ella y que pasa por su CM. Un resorte horizontal, de constante elástica K se une al extremo inferior de la varilla por uno de sus extremos, quedando el otro unido a un soporte fijo y rígido, como indica la figura, de forma que cuando la varilla se encuentra en posición vertical el resorte tiene su longitud natural. a) Demostrar que si la varilla se separa un pequeño ángulo θ de su posición de equilibrio y se suelta realiza un M.A.S. b) Determine el periodo del movimiento.
kF�
O
Tratamiento Dinámico:
De acuerdo con la ecuación fundamental de la dinámica de rotación, podemos escribir:
O
2
cos2
1
12
k
LM F
M I
I m L
θα
=
= ⇒ =
∑�
�
Ya que: KF K x= − Para ángulos pequeños cos 1 y, por otra parte,2
Lxθ θ≈ =
Tenemos que: 2L
K θ− 21
4 12m L=
2 2
2 2
30
d d K
dt dt m
θ θθ⇒ + =
Que es la ecuación de un M.A.S. cuya frecuencia angular al cuadrado es 3K/m.
15
Ejemplo 3 (continuación).
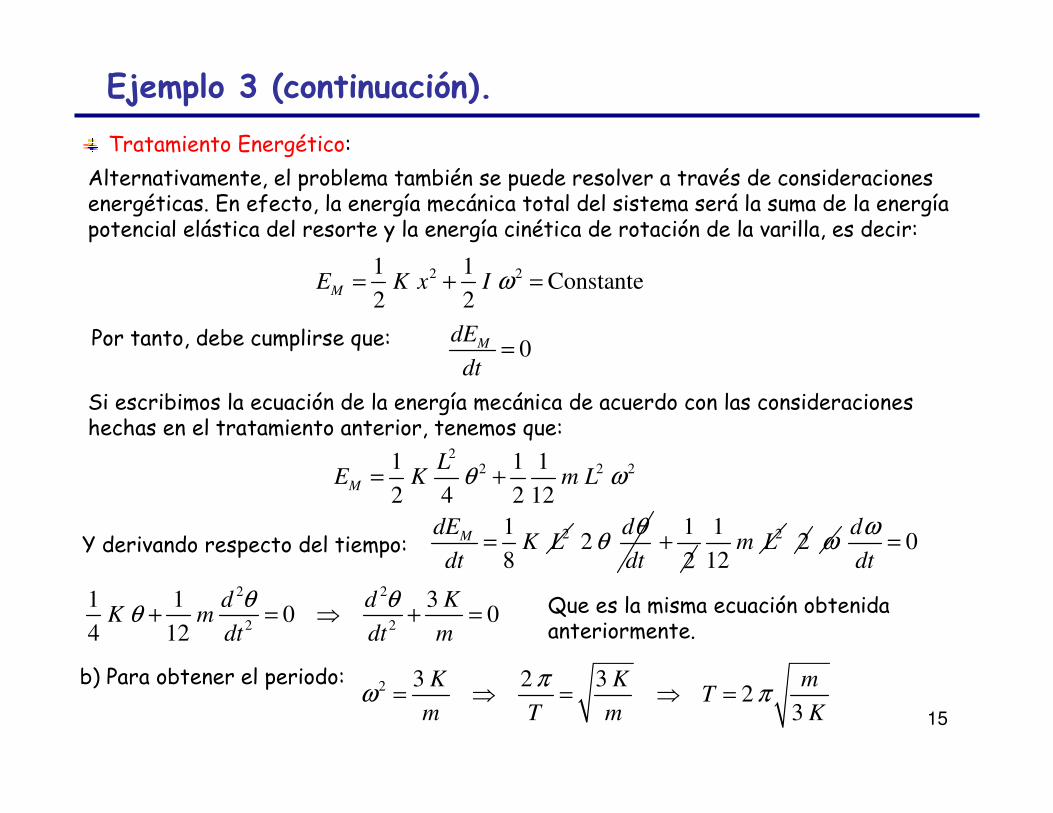
Tratamiento Energético:
Alternativamente, el problema también se puede resolver a través de consideraciones energéticas. En efecto, la energía mecánica total del sistema será la suma de la energía potencial elástica del resorte y la energía cinética de rotación de la varilla, es decir:
2 21 1Constante
2 2ME K x I ω= + =
Por tanto, debe cumplirse que:0MdE
dt=
Si escribimos la ecuación de la energía mecánica de acuerdo con las consideraciones hechas en el tratamiento anterior, tenemos que:
22 2 21 1 1
2 4 2 12M
LE K m Lθ ω= +
Y derivando respecto del tiempo:21
8
MdEK L
dt= 2
d
dt
θθ
1
2+ 21
12m L 2 ω 0
d
dt
ω=
2 2
2 2
1 1 30 0
4 12
d d KK m
dt dt m
θ θθ + = ⇒ + = Que es la misma ecuación obtenida
anteriormente.
b) Para obtener el periodo:2 3 2 3
23
K K mT
m T m K
πω π= ⇒ = ⇒ =

16
4.- Oscilaciones Amortiguadas (I)
En los sistemas reales son frecuentes la presencia de fuerzas disipativas (fuerzas de rozamiento, en general) que ocasionan pérdidas de la energía mecánica del sistema oscilante dando lugar a las denominadas Oscilaciones Amortiguadas.
Consideremos un caso como el que muestra la figura, donde la fuerza disipativa es proporcional a la velocidad de cuerpo y sentido contrario:
RF bv= − donde b es una constante positiva.
dvF ma k x bv m
dtΣ = ⇒ − − =�
�
La ecuación dinámica para este sistema será:
Que puede escribirse como:
2 2
0 02 0 donde2
dv k bv x y
dt m mβ ω ω β+ + = = =
siendo β el denominado factor de amortiguamiento. Obteniéndose finalmente:2
2
022 0
d x dxx
dtdtβ ω+ + =
Que es la ecuación general del oscilador amortiguado.
17
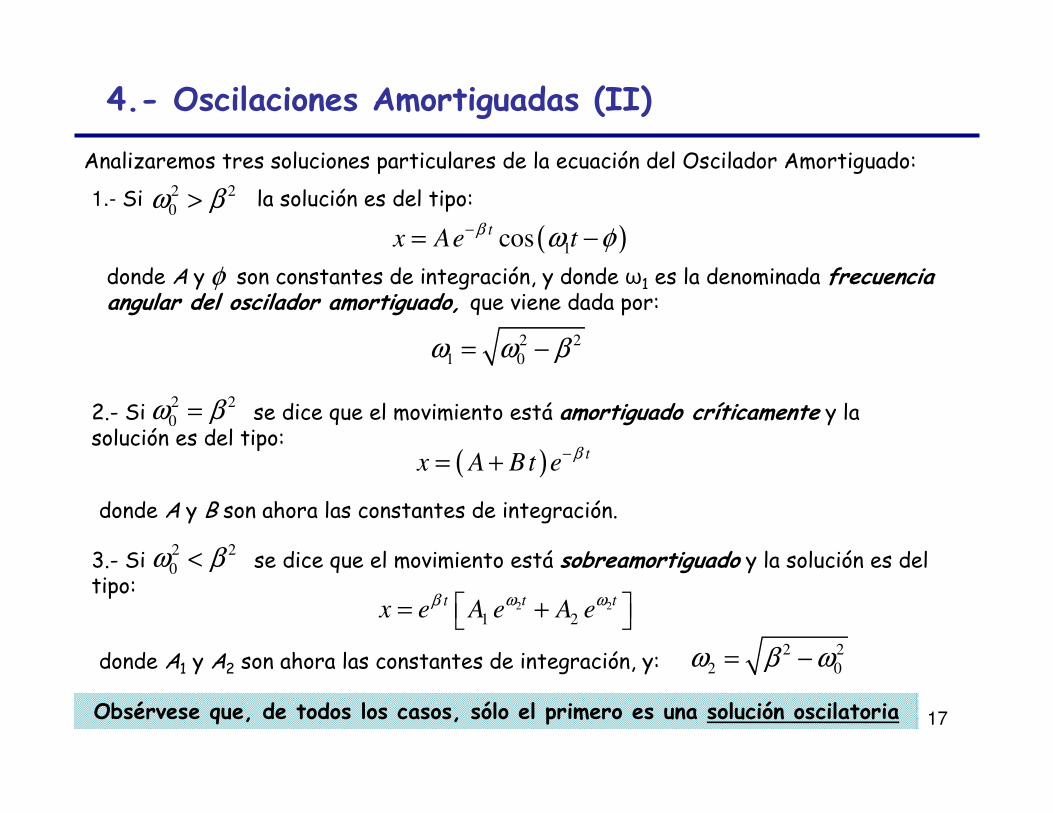
4.- Oscilaciones Amortiguadas (II)
Analizaremos tres soluciones particulares de la ecuación del Oscilador Amortiguado: 2 2
0ω β>1.- Si la solución es del tipo:
( )1costx Ae t
β ω φ−= −
donde A y son constantes de integración, y donde ω1 es la denominada frecuencia angular del oscilador amortiguado, que viene dada por:
φ
2 2
1 0ω ω β= −
2.- Si se dice que el movimiento está amortiguado críticamente y la solución es del tipo:
2 2
0ω β=
( ) tx A Bt e
β−= +
donde A y B son ahora las constantes de integración.
3.- Si se dice que el movimiento está sobreamortiguado y la solución es del tipo:
2 2
0ω β<
2 2
1 2
t ttx e A e A e
ω ωβ = +
donde A1 y A2 son ahora las constantes de integración, y:2 2
2 0ω β ω= −
Obsérvese que, de todos los casos, sólo el primero es una solución oscilatoria

18
4.- Oscilaciones Amortiguadas (III)
-A e-(b/2m) t
T = 2π/ω0
ω0 = (k/m)
1/2
8T7T6T5T4T3T2TT
-A
A
t
A e-(b/2m) t
x
( )1costx Ae t
β ω φ−= −Veamos gráficamente la solución oscilatoria:
19
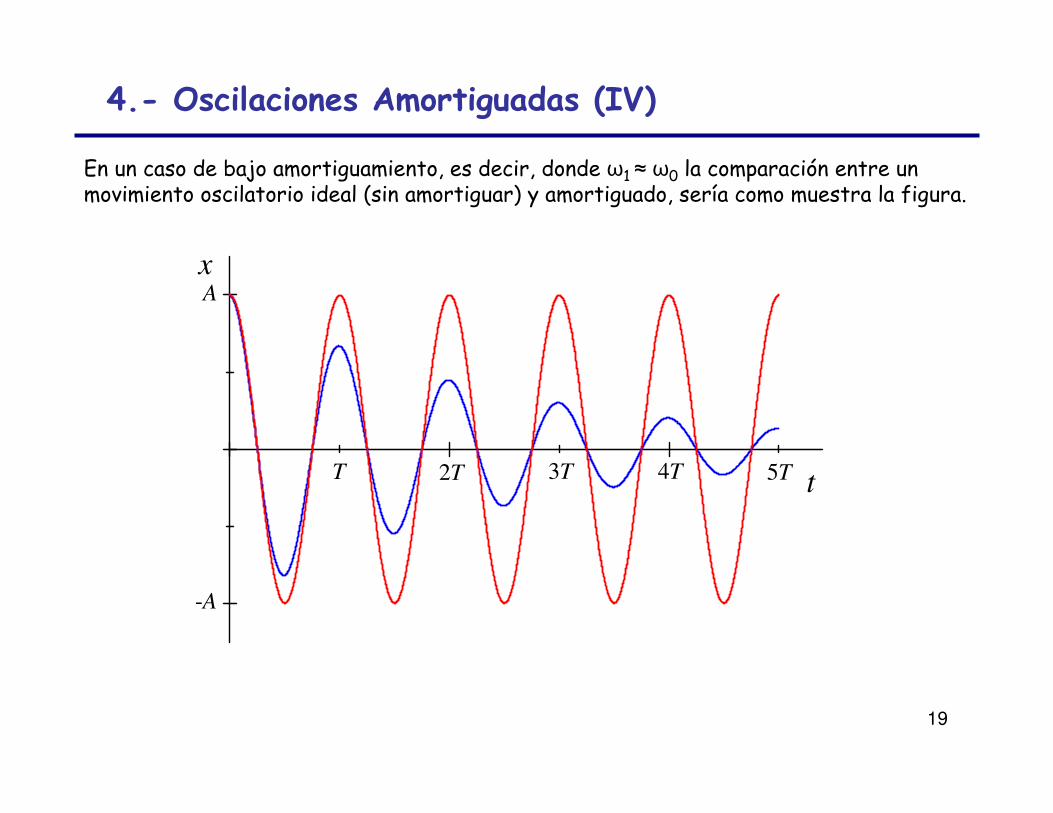
4.- Oscilaciones Amortiguadas (IV)
En un caso de bajo amortiguamiento, es decir, donde ω1 ≈ ω0 la comparación entre un movimiento oscilatorio ideal (sin amortiguar) y amortiguado, sería como muestra la figura.
5T4T3T2T
-A
A
x
tT

20
4.- Oscilaciones Amortiguadas (V)
Amortiguado críticamente
(ω0
2 = β
2)
Sobreamortiguado
(ω0
2 < β
2)
t
x
En las soluciones no oscilatorias, es decir, la segunda y tercera, la representación gráfica sería la que muestra la figura.
( ) Amortiguado críticamentetx A Bt e
β−= + ⇒
2 2
1 2 Sobreamortiguadot tt
x e A e A eω ωβ = + ⇒

21
4a- Energía del Oscilador Amortiguado
Ya que la energía mecánica de un oscilador es proporcional al cuadrado de la amplitud, y esta decae exponencialmente con el tiempo en el oscilador amortiguado, la energía también disminuye exponencialmente con el tiempo, es decir:
2 2 2
0 0
1 1donde
2 2
tE k A m A A A e
βω −= = =
Aunque no lo haremos aquí, puede demostrarse que la energía promedio por ciclo, viene dada por:
E
2 2 2 2
0 0 0
1
2
t tE m A e E e
β βω − −= =
donde A0 es la amplitud del oscilador sin amortiguar. Por tanto:
donde E0 es la energía del oscilador sin amortiguar. Por tanto:
2
0
tE E e
β−=
2 2 2
0 0
1 1( )
2 2
tE k A m A e
βω −= =

22
5.- Oscilaciones Forzadas
En las oscilaciones reales inevitablemente existe amortiguamiento. Por eso la amplitud de la oscilación disminuye con el tiempo hasta que la oscilación se extingue. Para mantener la oscilación es necesario comunicar energía al sistema oscilante para compensar las pérdidas producidas por las fuerzas disipativas.
Este aporte de energía se consigue mediante la aplicación de una fuerza externa, en cuyo caso hablamos de un Oscilador Forzado.
El carácter de esa fuerza externa puede ser muy diverso, pero un caso sencillo de estudiar y relativamente frecuente es el de una fuerza que varía con el tiempo de forma sinusoidal, es decir:
0( ) cosF t F tω=
donde ω es la frecuencia angular de la fuerza externa, que no debe confundirse con la frecuencia natural del oscilador ω0. La aplicación de la ecuación fundamental de la dinámica en este caso sería:
( )F ma k x bv F t maΣ = ⇒ − − + =�
�
O bien:2
2 002
2 cosFd x dx
x tdt mdt
β ω ω+ + =

23
5.1.- Solución de la Ecuación del Oscilador Forzado
La solución de la ecuación diferencial que describe el Oscilador Forzado consta de dos términos. Es decir:
( )( )
1cos
cos
t
g
g p
p
x Ae tx x x
x G t
β ω φ
ω θ
− = −= +
= −
Obsérvese que xg es la solución del Oscilador Amortiguado, mientras que xp es una solución particular que contiene dos parámetros, G y θ, que son la amplitud del oscilador forzado y el desfase con respecto a la fuerza impulsora, respectivamente, dados por:
( )
0
22 2 2 2
0 4
FmG
ω ω ω β=
− +2 2
0
2arctan
ω βθ
ω ω
=
− y
Por tanto, la solución del Oscilador Forzado es de la forma:
( ) ( )1cos costx Ae t G t
β ω φ ω θ−= − + −
Solución TRANSITORIA Solución ESTACIONARIA

24
5.2.- Características de los parámetros del Oscilador Forzado
( )
0
22 2 2 2
0 4
FmG
ω ω ω β=
− +
ω0
b = 0
b = 4.4
b = 2.4 b = 1.6
b = 0.8
b = 0.4G
ω
aumenta β
aumenta β
π
π/2
θ
ω0 ω
2 2
0
2arctan
ω βθ
ω ω
=
−
Obsérvese que la posición del máximo
de la amplitud depende del valor de β.
Obsérvese que, independientemente del valor
de β, cuando el desfase entre la fuerza impulsora y el oscilador siempre es de
π/2.
0ω ω=

25
5.3.- Potencia suministrada al Oscilador Forzado (I)
¿Bajo qué condiciones el agente que ejerce la fuerza impulsora suministra la máxima potencia al oscilador? La potencia entregada al oscilador vendrá dada por el producto de la fuerza impulsora por la velocidad en cada instante del oscilador, es decir:
( )( )( )
0 cos
coscos donde
2
F F t
P F v d G tdxv G t
dt dt
ω
ω θ πω ω δ δ θ
=
= −= = = − = −
Puede demostrarse que la potencia instantánea entregada al oscilador viene dada por:
{ }2
0 cos cos cos sen senP G F t t t tω ω δ ω ω ω= ⋅ + ⋅ ⋅
Y la potencia promedio corresponderá al valor medio de la función anterior, es decir:
0
1cos
2P G Fω δ= donde el término “cos δ” es el denominado factor de potencia.
Obsérvese que la potencia promedio suministrada es máxima cuando cos δ = 1, es decir, cuando δ = 0, o lo que es lo mismo, cuando F y v están en fase. Esto también
implica que el desfase θ sea π/2, lo que ocurre cuando ω = ω0, como se ha visto
anteriormente (observe la gráfica que muestra la variación de θ con ω).

26
5.3.- Potencia suministrada al Oscilador Forzado (II)
En definitiva, cuando la frecuencia de la fuerza impulsora coincide con la frecuencia natural del oscilador se produce una máxima transferencia de potencia del primero al segundo. A esta situación se le denomina RESONANCIA EN LA TRANSFERENCIA DE POTENCIA.
Veamos gráficamente esta situación: Ahora se observa que cuanto menor es el amortiguamiento mayor es el valor de la potencia entregada y más estrecha es la curva de potencia. Sin embargo, también se observa que la máxima potencia entregada siempre ocurre cuando lo cual es contrario a lo que se observaba en el caso de la amplitud G.
Por tanto, debemos distinguir entre la situación de Resonancia en la transferencia de potencia, en la que siempre la frecuencia de la fuerza impulsora coincide con la natural del oscilador, y la Resonancia en Amplitud que depende del
factor de amortiguación β.
0ω ω=
27
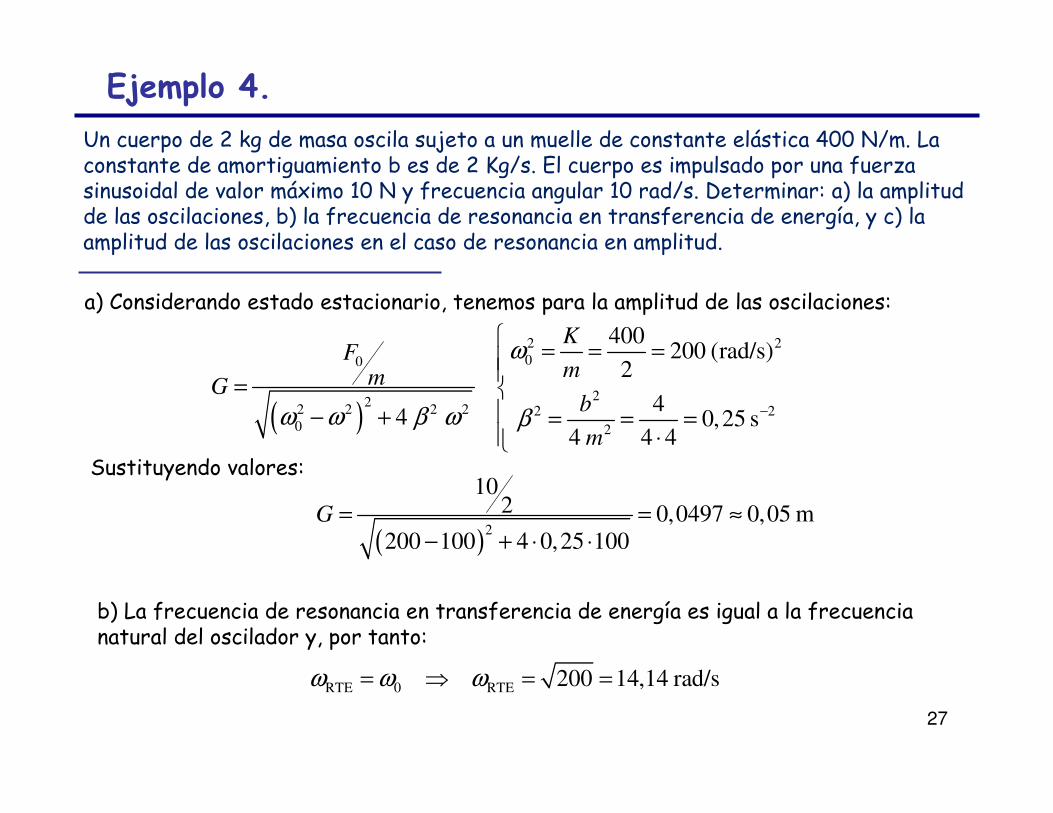
Ejemplo 4.
Un cuerpo de 2 kg de masa oscila sujeto a un muelle de constante elástica 400 N/m. La constante de amortiguamiento b es de 2 Kg/s. El cuerpo es impulsado por una fuerza sinusoidal de valor máximo 10 N y frecuencia angular 10 rad/s. Determinar: a) la amplitud de las oscilaciones, b) la frecuencia de resonancia en transferencia de energía, y c) la amplitud de las oscilaciones en el caso de resonancia en amplitud.
a) Considerando estado estacionario, tenemos para la amplitud de las oscilaciones:
( )
2 2
00
222 2 2 2 2 20 2
400200 (rad/s)
2
44 0,25 s
4 4 4
KF
mmGb
m
ω
ω ω β ω β −
= = =
= − + = = = ⋅
Sustituyendo valores:
( )2
102 0,0497 0,05 m
200 100 4 0,25 100
G = = ≈− + ⋅ ⋅
b) La frecuencia de resonancia en transferencia de energía es igual a la frecuencia natural del oscilador y, por tanto:
RTE 0 RTE 200 14,14 rad/sω ω ω= ⇒ = =
28
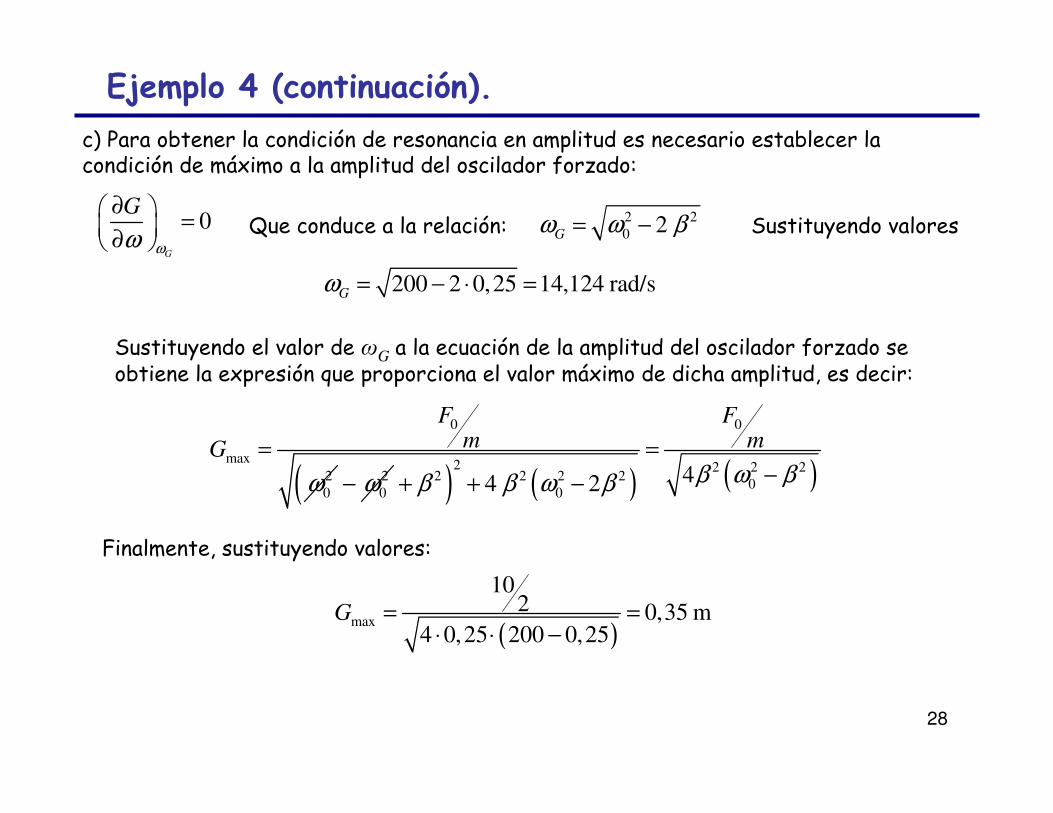
Ejemplo 4 (continuación).
c) Para obtener la condición de resonancia en amplitud es necesario establecer la condición de máximo a la amplitud del oscilador forzado:
0
G
G
ωω
∂ =
∂ Que conduce a la relación: 2 2
0 2Gω ω β= − Sustituyendo valores
200 2 0,25 14,124 rad/sGω = − ⋅ =
Sustituyendo el valor de ωG a la ecuación de la amplitud del oscilador forzado se obtiene la expresión que proporciona el valor máximo de dicha amplitud, es decir:
0
max
2
0
FmG
ω
=2
0ω−( ) ( ) ( )
0
2 2 2 22 2 2 2
00
44 2
Fm
β ω ββ β ω β
=−+ + −
Finalmente, sustituyendo valores:
( )max
102 0,35 m
4 0,25 200 0,25G = =
⋅ ⋅ −