GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un...
42
Modelado Grafcet Dpto. Ingeniería Eléctrica, Electrónica, Automática y Física Aplicada www.ieef.upm.es
Transcript of GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un...
![Page 1: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/1.jpg)
Modelado GrafcetDpto. Ingeniería Eléctrica, Electrónica, Automática y Física Aplicada
www.ieef.upm.es
![Page 2: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/2.jpg)
Introducción a GrafcetGrafcet: Grafo Funcional de Control Etapa TransiciónModelado gráfico para representar la parte secuencial deun automatismo.Interpretable por todos los actores del procesoproductivo: organización, producción, mantenimientoEs más que un lenguaje de programación.
![Page 3: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/3.jpg)
Niveles de representación1. Nivel 1: Descriptivo (lenguaje natural, verbos)
Marcro-etapas: desglose en etapas. Visión de arriba-abajo
2 Nivel 2: Tecnológico (tipos de sensores válvulas )2. Nivel 2: Tecnológico (tipos de sensores, válvulas,…)Parte operativa
3. Nivel 3: Detalle (programación, señales,…) Etapas = variables de estados
No es óptimo en número de memoriasFiabilidad más fácil el mantenimientoFiabilidad, más fácil el mantenimiento
![Page 4: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/4.jpg)
Niveles
Nivel 1: Descriptivo Nivel 2: Tecnológico Nivel 3: Detalle
Análisis de viabilidad Diseño (representación de la parte operativa)
Implementación
![Page 5: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/5.jpg)
Elementos básicos del grafcetE i i i l
Elementos:Etapa, transición, arco, acciones y receptividad
Grafo dirigido con dos tipos de vértices
Etapa inicial o de reposo
Marca de Etapa activa
Grafo dirigido con dos tipos de vérticesEtapas (cuadrado)Transiciones (trazo horizontal)
Los arcos dirigidos enlazan siempre vértices
0
receptividad1
Los arcos dirigidos enlazan siempre vérticesdistintos:
etapa+arco+transición+arco+etapa+…Normalmente, el grafcet se lee de arriba abajo
1 Tarea1 Tarea2
g jy los arcos tienen sentido descendiente.Cuando el arco tiene sentido ascendente debeindicarse obligatoriamente con una flecha.S d i ti id d l f ió ló i
receptividad2
Acciones de control
0
Se denomina receptividad a la función lógicaque define la transición.Las etapas se numeran. La numeración de lasreceptividades es opcional.
control
ecept v a es es opc o a .Se pueden añadir comentariosentrecomillados en los vértices o ref. enparéntesis.
![Page 6: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/6.jpg)
Elementos básicos del grafcetPuede haber varias etapas en reposo o activas a la vezPuede haber varias etapas en reposo o activas a la vez.Marca es un círculo negro que indica la etapa activa en un instante de tiempo cuando el PLC está ejecutando un instante de tiempo cuando el PLC está ejecutando un programa.C d t i l t d bit d iCada etapa es implementada por un bit de memoria.Se representa cada etapa por X# (bit de memoria)Transición validada
Cuando están activas las etapas que la anteceden.
Transición franqueadaEstá validada y es receptiva
1S 1 31S X S⋅ ⋅ 1 1S ↑
A B C D E
Ejemplos de sintaxis válidas para receptividades
![Page 7: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/7.jpg)
Acciones
Una etapa tiene un número asociado de acciones: 0,1,…,nCada acción se añade como una caja a la izquierda de la etapaa la que va asociada.
Ejemplos de acciones continuas con la etapa
continuas con la etapa
Sin acción: etapa de esperaSin acción: etapa de esperaMúltiples acciones se ejecutan de forma concurrenteAcción condicionada: Condiciona la acción de control a un Acción condicionada: Condiciona la acción de control a un evento
A B
![Page 8: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/8.jpg)
Evolución del grafcet
Transición receptiva Se=1 Pon Sc Se⋅ ⋅ Pon Sc Se⋅ ⋅
Transición lid d X1 1validada X1=1
Cilindro expandiendo
Cilindro expandido (acción mantenida)
FRANQUEABLE
Sc Se
Expandir
![Page 9: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/9.jpg)
Práctica 1
Realizar un automatismo para el control de un cilindro dedoble efecto con una electroválvula 5/2 biestable. Sedi d l d P d d i ió S1dispone de un pulsador P y dos sensores de posición S1 yS2, que detectan la compresión y expansión del cilindrorespectivamente. Al pulsar P se realizará un ciclo completorespectivamente. Al pulsar P se realizará un ciclo completode expansión/compresión del cilindro. Para la compresióndel cilindro P debe estar desactivado
![Page 10: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/10.jpg)
Ejemplo
0 Reposo
1 Comprimir
Inicio
1 Comprimir
Inicio·S1
2 Expandir
No/Inicio· S2No/Inicio S2
![Page 11: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/11.jpg)
S5
![Page 12: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/12.jpg)
S5
![Page 13: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/13.jpg)
S5
![Page 14: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/14.jpg)
S5
![Page 15: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/15.jpg)
S5
![Page 16: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/16.jpg)
S5
![Page 17: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/17.jpg)
Control de un carroDado un pulsador PON y un carro, el cual está inicializadosiempre en posición de reposo (parado y en el A). Al pulsarPON el carro hace el ciclo de ir a la derecha, llegar al final deB y volver a posición inicial. Si en el ciclo, se vuelve a pulsarPON, no se modifica el comportamiento del ciclo, i.e. sólo estenido en cuenta el pulsador cuando el carro está enreposo.
Entradas SalidasDcha
A B
Entradas Salidas
PON Izq
S D h
Izqda
PON
A B SA Dcha
SB
![Page 18: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/18.jpg)
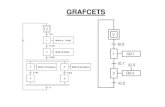
Estructuras lógicas fundamentales
Secuencia Divergencia concurrente (Y)
Convergencia concurrente (Y)( )
Divergenciaalternativa (OR)
Convergencia alternativa (OR)
Saltos(casos particulares de divergencia OR)
![Page 19: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/19.jpg)
Reglas de evolución
1-Regla de inicio: El arranque del sistema supone la activación de todas las etapas iniciales y solamente éstas
II-Regla de evolución de una transición: Una transición franqueable debe ser inmediatamente franqueada
III R l d l ió d l i III- Regla de evolución de las etapas activas: El franqueo de una transición supone la activación simultánea de todas las etapas inmediatamente posteriores y desactivación simultánea de todas las etapas inmediatamente p y panteriores
IV-Regla de franqueamiento simultáneo: Todas las transiciones franqueables se franquearán inmediata y simultáneamente
V-Regla de prioridad de etapa activa: Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET (debido a las reglas anteriores) implica la activación y desactivación simultánea de una etapa, ésta deberá permanecer activa
![Page 20: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/20.jpg)
Ejemplos
1
2• 3• 2 3c=1
1
1
c
1•
c
Estado prohibido: transición franqueable REGLA II
Franqueamiento habitual (c=1)REGLA III
a=1, b=1
1
c
2•
d
3
4•
f
5
d=1, f=1
Franqueo simultáneo (d=1, f=1) Activación y Desactivación simultánea
e g
Franqueo simultáneo (d 1, f 1)REGLA IV
Activación y Desactivación simultánea REGLA V
![Page 21: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/21.jpg)
Ecuación Fundamental
En-1SET RESET & Enclavamiento
1 1 1n n n n nE E T E E− − += ⋅ + ⋅ En
Tn-1
SET RESET & Enclavamiento
En+1
Tn
n+1
Ecuación de retención del estado
La etapa En se activará, si estando activada la etapa En-1 se satisface la transición Tn-1. A partir de este instante permanecerá activada hasta que se active la En+1
![Page 22: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/22.jpg)
Prioridad en estructuras O
La estructura O en su forma más simple no indica prioridad. Si es posible que C2=C3=1 simultáneamente entonces existe un error de diseño.
SOLUCIONES
c2 c3⋅
Modelado de prioridad en la receptividad
Norma IEC 61131-3
Recomendación de diseño: Toda divergencia acaba en una convergencia
![Page 23: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/23.jpg)
Ejemplo
La presente figura representa una bifurcación en el planovertical en una cinta transportadora. Para conseguir elmovimiento del segmento del carril de la bifurcación seha dispuesto de un cilindro neumático de simple efecto,controlado por una válvula monoestable pilotadaeléctricamente.
![Page 24: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/24.jpg)
EjemploEl sensor S1 es un sensor infrarrojo, dispuesto de tal forma quecuando las cajas entrantes superan una determinada altura, elsensor responderá con 24 V mientras que estará fijando unasensor responderá con 24 V, mientras que estará fijando unaseñal de 0V en cualquier otro caso (cajas más pequeñas oninguna). El sensor capacitivo de presencia S2 detecta, en el carrilsuperior, que la caja ya ha salido completamente de la bifurcación.S2 está situado al final del carril móvil. El automatismo funcionade la siguiente manera:de la siguiente manera:
![Page 25: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/25.jpg)
EjemploLa posición de reposo es la indicada en la figura. Siempre que se detecte unacaja en S1 (es decir, una caja alta) se desviará al carril superior y por tantodeberá permanecer en esta posición hasta detectar que la caja ha salido (S2).Las cajas discurren por las cintas con bastante espacio entre ellas no dándoseLas cajas discurren por las cintas con bastante espacio entre ellas, no dándosenunca la situación de que dos cajas puedan estar a la vez en la bifurcación. Alsistema se le añaden dos pulsadores, uno de inicio y otro de parada. Al pulsarel botón de inicio, el sistema moverá las cintas transportadoras C1 y C2 o C1, p yy C3 según el tamaño de las cajas. Si se pulsa el botón de parada, las cintas separarán pero asegurándose que no se queda ninguna caja alta en labifurcación.
C1
C3C3
C2
![Page 26: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/26.jpg)
Grafcet (nivel 2)
0
![Page 27: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/27.jpg)
Resolución S7
Bloque: OB100 Símbolo Dirección Tipo de datos ComentarioA1 A 124.3 BOOL
Segm.: 1 ReposoSETS "X0"S "X10"
A1 A 124.3 BOOLC1 A 124.0 BOOLC2 A 124.1 BOOLC3 A 124.2 BOOLInicio E 124.0 BOOL
R "X1"R "X2"R "X11"
Inicio E 124.0 BOOLParada E 124.1 BOOLS1 E 124.2 BOOLS2 E 124.3 BOOLX0 M 1.0 BOOL0 0 OOX1 M 1.1 BOOLX10 M 1.3 BOOLX11 M 1.4 BOOLX2 M 1.2 BOOL
![Page 28: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/28.jpg)
Resolución S7Bloque: OB1
Segm.: 1 Etapa 0->1U "X0"
Segm.: 5 Etapa de 10-> 11U "X10"U "Inicio"UN "Parada"U X0
U "X11"R "X0"S "X1“
UN ParadaR "X10"S "X11“
Segm : 6 Etapa 11->10Segm.: 2 Etapa 1->0U "X1"U "X10"R "X1"
Segm.: 6 Etapa 11 >10U "X11"U "Parada"R "X11"S "X10“R X1
S "X0“
Segm.: 3 Etapa 1->2U "X1"
S X10
Segm.: 7 Activación de C1 en X1 o X2O "X1"O "X2" Actividades enU X1
UN "X10"U "S1"R "X1"S "X2“
O X2= "C1“Segm.: 8 Activación de C2U "X1"= "C2“
varias etapas
S X2
Segm.: 4 Etapa 2 -> 1U "X2"U "S2"
C2Segm.: 9 Activación C3U "X2"= "C3"Segm.: 10 Activación A1U S2
R "X2"S "X1"
Segm.: 10 Activación A1U "X2"= "A1"
![Page 29: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/29.jpg)
Simulador
![Page 30: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/30.jpg)
Ejercicio propuesto (práctica 1)
Modelado grafcet e implementación en STEP 5 del control dedos cilindros de doble efecto con pulsador de arranque (PON) yparada (POFF). La secuencia completa del ciclo debe serEXPANSION1-EXPANSIÓN2-COMPRESIÓN1-COMPRESIÓN2.
SC1 SE1 SC2 SE2
4 2
5 3A2 A1
4 2
5 3B2 B1
51
3 1
![Page 31: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/31.jpg)
Divergencia concurrente (Y)Errores de sintaxis
Recomendación de diseño: Toda divergencia acaba en una convergencia
![Page 32: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/32.jpg)
Evolución fugazSi C1=C2=1
![Page 33: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/33.jpg)
Grafcet parcialesEtapas fuentes-sumiderasRearme del autómata
Grafcet parcial
![Page 34: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/34.jpg)
EjemploEl esquema de la figura representa un sistema de transferenciasde piezas. El dispositivo efectúa la transferencia de piezas sobre
f fdos plataformas diferentes. Desde que una pieza se presentadelante del posicionador 1, éste la envía delante del posicionador2 que situado perpendicularmente transfiere dicha pieza sobre2 que, situado perpendicularmente, transfiere dicha pieza sobrela plataforma de evacuación.
![Page 35: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/35.jpg)
Nivel 1
![Page 36: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/36.jpg)
Nivel 2
![Page 37: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/37.jpg)
S7
A1 E 124.0 BOOLOB100A2 E 124.1 BOOL
B1 E 124.2 BOOLB2 E 124.3 BOOLS1 E 124.4 BOOL
OB100 SET S "X0"R "X1"R "X2"V1 A 124.0 BOOL
V2 A 124.1 BOOLX0 M 1.0 BOOLX1 M 1.1 BOOL
R "X2"R "X3"R "X4"R "X5"
X2 M 1.2 BOOLX3 M 1.3 BOOLX4 M 1.4 BOOLX5 M 1.5 BOOL
![Page 38: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/38.jpg)
S7
Segm.: 1 De 0 -> 1U "X0"U "S1"
Segm.: 4 De 3 y 4 a 5U "X3" U "X4"U S1
U "A1"U "B1"R "X0"S "X1"
U X4U "A1"U "B1"R "X3"R "X4"S X1
Segm.: 2 De 1 a 2 y 4U "X1"U "A2"
R X4S "X5"
Segm.: 5 De 5 a 1U "X5"U A2
R "X1"S "X2"S "X4“
U X5 U "A1"U "B1"U "S1"R "X5"
Segm.: 3 De 2 a 3U "X2"U "B2"R "X2"
R X5S "X1"
Segm.: 6 Acción válvula 1U "X1"R X2
S "X3"U X1= "V1"
Segm.: 7 Acción válvula 2U "X2"U X2 = "V2"
![Page 39: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/39.jpg)
S7
![Page 40: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/40.jpg)
Problema propuestoModelado grafcet e implementación en STEP 7 del control dedos cilindros de doble efecto con pulsador de arranque (PON) y
d (POFF) L l d l l d bparada (POFF). La secuencia completa del ciclo debe serconcurrente: EXPANSION 1-2 - COMPRESIÓN 1-2.
SC1 SE1 SC2 SE2
4 24 2
51
3A2 A1
4 2
51
3B2 B1
1
![Page 41: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/41.jpg)
Problema propuestoUn montacargas compuesto por dos pisos. Para su mando,en cada piso está previsto un botón:
- en el piso inferior de pedir la subida (PS).- en el piso superior de pedir la bajada (PB).p p p j ( )
Para que estas informaciones sean tomadas enconsideración, es necesario que el montacargas esté paradoco s e ac ó , es ecesa o que e o taca gas esté pa a oen su piso correspondiente. Los finales de carrera de pisoalto (FCPA) y bajo (FCPB), permiten conocer las posiciones( ) y j ( ) p pextremas del montacargas. Con la salida C1 el motor subeel montacargas con la señal C2 baja.
![Page 42: GrafcetBasico.cpd..ppt [Modo de compatibilidad] · Ejemplos de acciones ... Si la evolución de un GRAFCET (debido a las e las a te io es) i plica la acti ació desacti ació GRAFCET](https://reader039.fdocuments.ec/reader039/viewer/2022031102/5ba1f3b209d3f2616b8d6f55/html5/page/42.jpg)
Montacargas
“Montacargas”
0
1 C1 2 C2
(PS_I+PS_S)·FCPB
“Sube” “Baja”
(PB_I+PB_S)·FCPA
1 C1 2 C2
FCPA FCPB
Sube Baja