Modelos de Series de Tiempo Estacionarios Univariados

of 37
Transcript of Modelos de Series de Tiempo Estacionarios Univariados
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
1/37
2.1
C APÍTULO 2MODELOS DE SERIES DE TIEMPO
ESTACIONARIAS UNIVARIADOS
En esta sección discutimos las herramientas básicas del análisis de series de tiempo paramodelos con una sola variable. Ciertamente, modelar una variable puede parecer una propuestamodesta; la mayoría de los problemas en economía se refieren a la interacción entre variableseconómicas y, en particular, en la influencia que unas tienen sobre otras.
Eisten dos ra!ones para enfocarse en modelos univariados. "a primera es de tipopeda#ó#ico y se refiere a que los conceptos que se desarrollan en este capítulo pueden ser etendidos
a modelos multivariados directamente, pero resulta más fácil entenderlos en un conteto univariado.$e#undo, y más importante, los modelos univariados proveen una importante fuente deconocimiento en dos dimensiones% primero, para identificar las características propias de cada seriede tiempo &tama'o de sus innovaciones, persistencia, dinámica hacia el equilibrio( y, se#undo, parapredecir el comportamiento futuro de una variable económica con confian!a y economía de medios.
2.01 PRIMERA R EPRESENTACIÓN FUNDAMENTAL DE UN PROCESO ESTOCÁSTICO
)ran parte del análisis de modelos univariados de series de tiempo estacionarias lo haremossobre la base de la función de autocovarian!as &*+t ( del proceso y t -, que se define como%
jt = E [ y t −t ] [ y t − j −t − j ] &2.1(
donde t es la media de la serie en el instante t y E es la esperan!a matemática condicional en lainfomación disponible hasta el instante t-1. /aturalmente, *0t es la varian!a de la serie en el instante t .
"a función de autocovarian!a es la primera representación fundamental de un procesoestocástico. El concepto de fundamental se refiere a que dicha función identifica y caracteri!a elproceso estocástico completamente. $i dos variables tienen la misma función de autocovarian!as,entonces son el mismo proceso estocástico.
2.02 ESTACIONARIEDAD Y ERGODICIDAD
$e define la estacionariedad como aquella propiedad de la función #eneradora de los datos&3)4( que da ori#en a la muestra, tal que%
• Estacionariedad débil: cuando la media y covarianzas no dependen del tiempo (sólo de j).• Estacionariedad fuerte: cuando la función de probabilidad conjunta de las realizaciones de x t no depende
del tiempo y sólo depende de j !.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
2/37
2.2
/ote que la estacionariedad fuerte compromete todos los momentos de la distribución, entanto que la estacionariedad d5bil se limita a dos de ellos &media y covarian!as(. En realidad, ladenominación de estacionariedad d5bil es simplemente coloquial. 6no podría definir estacionariedad
para cualquier momento de la función de distribución; así, el proceso sería estacionario de primerorden si la media es constante, estacionario de se#undo orden si la covarian!a es constante, etc.
4or otro lado, el que un proceso cumpla con estacionariedad fuerte no implica que cumplacon estacionariedad d5bil. 4or e+emplo, datos #enerados se#7n la distribución de Cauchy cumpliráncon la propiedad de ser estacionarios en el sentido fuerte, pero no con ser estacionarios en el sentidod5bil. $in embar#o, estacionariedad d5bil más normalidad implican estacionariedad fuerte.
Cuando una variable aleatoria es estacionaria d5bil, su función de autocovarian!as puede serescrita, y eventualmente estimada, como%
j= E [ y
t −][ y
t − j−] &2.2(
"a importancia que tiene el que una variable sea estacionaria queda #raficada en la reducciónen el n7mero de parámetros necesarios para describirla como se desprende al comparar la ecuación&2.1( con &2.2(. $i la distribución fuese normal pero no estacionaria, en cada instante de tiempohabría que parametri!ar su media, varian!a y covarian!as. En una muestra de tama'o n , ello equivalea estimar n n n1 / 2 parámetros. $i la variable, por otro lado, es estacionaria, basta conparametri!ar la media y la función de autocovarian!as, con sólo n"1 parámetros.
8Cómo sabemos si la serie es estacionaria9 Esta es una pre#unta comple+a, a la cual lededicaremos bastante análisis en el Capítulo :. 4or el momento baste decir que el problema que ellaplantea es el si#uiente% 8es posible usar la muestra y t - y calcular los momentos E y < y Cov y
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
3/37
2.=
En la práctica, y como demostraremos formalmente más adelante, lo que se requiere es quelas autocovarian!as tiendan a cero cuando +HI.2 "a intuición es que para que la serie seaestacionaria el pasado remoto &+HI( no debe contener información 7til para hacer predicciones
sobre las reali!aciones contemporáneas o futuras del proceso estocástico. Esto ei#e%
∑ j=0
∞
| j | ∞ &2.:(
G#ualmente, una serie estacionaria en covarian!a es er#ódica en los se#undos momentos si
limT → ∞1
T − j ∑t = j1
T
y t − y t − j−→ j &2.J(
6sualmente er#odicidad y estacionariedad son equivalentes. /o obstante, considere el
proceso y t i=i t , donde i es la media de cada secuencia y se etrae de una /&0,KL(. El proceso esestacionario porque E [ y t
i ]= E [i ]=0 y V [ y t i ]=2
2 , pero no es er#ódico porque el promediode una secuencia dada computado usando &2.=( no es cero sino i.
2.03 FUNCIÓN DE A UTOCORRELACIÓN3
En la práctica, la función de autocovarian!as no se utili!a para el análisis de series de tiempoporque depende de unidades de medida que hacen comple+a su interpretación. "a función deautocorrelación Mdefinida como la función de autocovarian!as normali!ada por la varian!aM tiene la venta+a de ser adimensional &sin unidades( y estar acotada al intervalo A1,1
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
4/37
2.:
2.04 PROCESO R UIDO BLANCO4
Este proceso, que es la base del análisis de series de tiempo, se describe como aquel que
satisface las si#uientes propiedades%
E [t ]= E t | t −1 ,t −2 ,=0 &2.T(
V [t ]=V t |t −1 , t −2 ,=2 &2.@(
E [t t − j ]= E t t − j | t −1 ,t −2 ,=0 j ≠ 0 &2.B(
"as condiciones &2.@( y &2.B( se refieren a la ineistencia de correlación serial o predecibilidadde la variable. Es decir, condicional en la información disponible en el instante t no es posiblepredecir el valor futuro condicional del proceso -. "a condición &2.B( se'ala que el proceso tiene
varian!a condicional constante &homocedasticidad condicional(. $i, además, se tiene que lasinnovaciones t ↝ N 0,
2 , entonces este proceso se llama Uuido ?lanco )aussiano.J
Evidentemente, este es un proceso estacionario en media y covarian!a. Como 5stas sonconstantes, no dependen del tiempo.
El correlo#rama teórico del ruido blanco es bastante simple%
j=1 j=0
j=0 j ≠0&2.10(
lo que indica que el proceso no tiene memoria del pasado.
Como representación de series económicas este proceso es limitado porque no da cuenta deuna de sus principales características% la persistencia. En el ruido blanco, una innovación #rande M positiva o ne#ativaV no tiende a ser se#uida por una innovación de tama'o o dirección similar. Ounque el proceso parece poco atractivo, está en la base de muchos modelos económicos modernos&considere el tipo de perturbación de un modelo de epectativas racionales( y de todos los modeloseconom5tricos &considere el papel del residuo en el modelo clásico de re#resión y t = x t t (.Wás a7n, al#unos modelos económicos predicen que el comportamiento de variables claves de laeconomía debe ser el de un ruido blanco &p.e., las #anancias etraordinarias de las acciones, se#7n elmodelo de ama, 1BT0 (.
: Xri#inalmente, el t5rmino ruido blanco se refería a interferencia radial o el5ctrica y fue acu'ado por ". 3. Carson, Q.U. Wiles Y $. $. $tevens en 1B:=. Ellos se'alan que 2nside t&e plane ... 3e &ear all freuencies added to#et&er at once4 producin#a noise 3&ic& is to sound 3&at 3&ite li#&t is to li#&t. "a lu! blanca es aquella que combina todos las otras luces que eistenen distintas frecuencias &SZision, [earin# and Oeronautical 3esi#n,S cientific *ont&ly , J, &1B:=(, ::A:J1(.
J Es posible #enerali!ar el proceso ruido blanco. 4or e+emplo, puede asumirse que las innovaciones no sonindependientes. $i solo se cumple la primera condición, entonces
t corresponde a una martin#ale difference seuence .
E. ama, 1BT0, Efficient capital mar5et: a revie3 of t&eory and empirical 3or5, Nournal of inance 2J%2 &Way(, =@=A:1T
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
5/37
2.J
Wás allá de su aplicabilidad directa para representar series económicas, el valor del ruidoblanco es que se utili!a para la construcción de otros procesos estocásticos como se describe acontinuación.
"a i#ura 1 presenta 1.000 reali!aciones de un proceso tipo ruido blanco )aussiano estándar&es decir, con
2=1 ( hechas usando )auss y su correlo#rama emp6rico.T /ote que, aunque el procesopor construcción es ruido blanco, las correlaciones mayores a cero estimadas sobre la base de unamuestra no son eactamente cero. Esto se debe a que las correlaciones muestrales están estimadascon informacción limitada y, por ello, son susceptibles de depender de la conformación de lamuestra. $i reali!a el eperimento con 10,000 observaciones verá como las correlaciones muestralesson más parecidas a las teóricas.
Fig!" 2.1
P!#$% Ri'# B(")$#S%!i% * C#!!%(#g!"+"
T El correlo#rama empírico depende, de manera natural, de la muestra x t - y su tama'o, por lo que no resulta etra'o
que ten#a correlaciones medidas distintas de cero cuando j es #rande. El pro#rama de )auss está en el Op5ndice?.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
6/37
2.
2.0, PROCESOS MEDIA MÓVIL@
Este proceso se contruye usando una combinación de ruidos blancos. El proceso media
móvil de orden finito , WO& (, se define como%
y t =t 1t −12 t −2qt −q &2.11(
donde y el vector \ son parámetros constantes y distintos de infinito. "a media del proceso &2.11(es E [ y t ]= , obviamente, y su varian!a es 0=
21122
2q2 . "a función de
autocovarian!as es%
j=2
j j11 j2 2q q− j ∀ j=1, q=0 ∀ jq
&2.12(
"a función de autocorrelación correspondiente es muy similar%
j =[ j j1 1 j2 2...q q− j
10...q∀ j=0,1,... , j
0 ∀ jq ] &2.1=(
con 7 891. Como se deduce de la ecuación &2.1=( los modelos de media móvil tienen autocorrelaciones distintas de cero. Es decir, la memoria se les acaba en el re!a#o y la informacióndel pasado distante Mmayor a M no influye en la predicción de y t ni en su varian!a. En la +er#a deseries de tiempo se dice que el correlo#rama muere s7bito en .B /ótese que no es posible
identificar de manera 7nica un proceso WO& ( a partir del correlo#rama. 4or e+emplo, los si#uientesprocesos tienen el mismo correlo#rama%
a y t = t −1t b y t =1
t −1t &2.1:(
Odicionalmente, resulta obvio que el WO& ( es estacionario porque su función deautocovarian!a no depende del tiempo y es finita. "a suma de los \ + es siempre menor que infinito,lo que vuelve estacionario el proceso.
8]u5 sucede si el WO es de orden infinito, es decir si 9 9 Esta pre#unta es bastante
comple+a pues nos lleva a pensar en límites de secuencias. 4or el momento usaremos un resultadoque demostraremos más adelante% i la secuencia de coeficientes del *() es sumable absoluta (absolute
@ El primer econometrista en estudiar seriamente procesos de media móvil fue ).6. Rule en un traba+o de 1B0B queutili!aba promedios instantáneos& 0ournal of t&e oyal tatistical ociety , T2, T21AT=0(. El t5rmino se populari!ó con elteto de Q. G. Fin#^s Elements of tatistical *et&ods &1B12(. /o obstante, el uso de promedios móviles para suavi!ardatos se había populari!ado varias d5cadas antes de los traba+os de Rule.
B ;na disciplina no puede ser ense
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
7/37
2.T
summable)4 entonces la secuencia de autocovarianzas es sumable absoluta y el proceso es estacionario. Consideremosla varian!a del proceso &2.11(, recordando que las innovaciones son independientes, cuando H I
V [ y t ]=lim q →∞ ∑ j=0
q
j2
2= 2 limq → ∞ ∑
j =0
q
j2 &2.1J(
Este límite será finito Mes decir, la varian!a de la serie será finitaM sólo si la secuencia decoeficientes del WO es sumable cuadrática & suare summability (. "as series estacionarias cumplen unacondición un poco más estricta llamada sumable en valor absoluto & absolute summability (%
∑ j=0
∞
| j |∞ &2.1(
/aturalmente, si el WO& ( tiene coeficientes que son sumables en valor absoluto, la serie será
er#ódica en la media. $i, además, _t es )aussiano entonces el proceso será er#ódico en todos losmomentos. Esto lo vamos a usar más adelante para construir funciones de verosimilitud.
En la i#ura 2.2 se presentan 1.000 reali!aciones del si#uiente proceso WO&2( y t =0.2t −1−0.4t −2t , incluyendo su correlo#rama empírico. Como se puede ver, la memoriadel proceso se acaba en el se#undo re!a#o.
Fig!" 2.2P!#$% M%'i" M-i( MA/2
S%!i% * C#!!%(#g!"+"
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
8/37
2.@
2.0 PROCESOS A UTOREGRESIVOS
"os procesos autore#resivos tienen una ló#ica distinta de los modelos WO porque no se
construyen a partir de la historia de las innovaciones sino la de la misma variable &más la innovacióncontemporánea(.
Pomemos el más simple de los procesos autore#resivos, un OU&1( del tipo
y t = y t −1 t &2.1T(
nótense las diferencias entre este proceso y cualquier WO& (.
4or recursión, podemos escribir este proceso como%
y t =t [t −1 y t −2]=t t −1 2
y t −2 &2.1@(
continuando la recursión adAinfinitum obtenemos%
y t =t t −12t −2
3t −3 ... &2.1B(
es decir, es un WO&I(. 4ara que el proceso sea estacionario la secuencia tiene que ser sumable en valor absoluto, lo que a su ve! requiere que `` 1.
"a media del proceso &2.1T( es cero, pero si el proceso fuese y t = y t −1t , su medianoAcondicional sería%
E [ y t ]=
1−&2.20(
la implicación de este resultado es que si en cualquier modelo autore#resivo incluimos una constante,5sta dará cuenta de la media de la serie.
"a varian!a del proceso OU&1( es 0= 2
1−2 y su función de autocovarian!as es;
+=+ 2
1−2&2.21(
lo que da ori#en a una función de autocorrelación decreciente suave, del tipo j = j .
[ay dos elementos que se deben hacer notar%
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
9/37
2.B
1. $i 0, el correlo#rama tiene ciclos, i.e., valores positivos alternados con ne#ativos. "ama#nitud de los ciclos, sin embar#o, es decreciente.
2. "a propiedad de estacionariedad de la serie implica que Cov [ y t , y t − j ]=Cov [ y t , y t j ] .Wecánicamente esto sucede porque podemos hacer la recursión hacia atrás o hacia adelante.Conceptualmente, la ra!ón es que siendo estacionaria la serie lo 7nico que determina unacovarian!a es el lar#o del re!a#o, es decir, la distancia entre y t e y t-j y no t .
En la i#ura 2.= se presentan 1.000 reali!aciones del proceso y t =0.85 y t −1t donde lasinnovaciones son ruido blanco )aussiano estándar y y 898. $e incluye, además, el autocorrelo#ramaempírico en el que se puede ver claramente el patrón suavemente declinante de lasautocorrelaciones.
Fig!" 2.3P!#$% A#!%g!%&i# AR/1
S%!i% * C#!!%(#g!"+"
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
10/37
2.10
El mane+o de modelos de serie de tiempo es más fácil si se usa el operador de re!a#os, = ,que permite operar con los re!a#os de manera cómoda y al#ebráicamente. 10 $e define el operadorcomo L y t = y t −1 . Osí, L
2 y t = y t −2 y L−2
y t = y t 2 .
El modelo OU&1( se puede reAescribir como%
1− L y t =t &2.22(
de donde se desprenden las ecuaciones &2.1B( y &2.20( directamente. /ote que si por simplicidad sereduce 0, entonces de &2.22( se deduce%
1− L yt = t ⇒ y t = t 1− L =t 1 L
2 L
2... &2.2=(
es decir, obtenemos nuevamente el resultado anterior Mque todo OU&1( tiene una representaciónWO&I(M pero además queda en evidencia que, para que el proceso sea invertible, se requiereimponer restricciones sobre . /ote que la ecuación &2.2=( se obtiene usando una epansión de Paylor.
$i etendemos el modelo anterior a un caso #eneral que llamaremos OU& p ( tenemos%
y t =1 y t −12 y t −2... p y t − pt &2.2:(
"a media y función de autocovari!an!as del proceso OU& p ( son bastante más difíciles de
obtener. Zamos a usar un modelo autore#resivo de se#undo orden y el operador de re!a#os paraestudiar los procesos #enerales. UeAescribiendo &2.2:( como un OU&2( tenemos%
y t =1 y t −12 y t −2t &2.2J(
usamos el operador de re!a#os
y t 1−1 L−2 L2=t &2.2(
si factori!amos el t5rmino en " como un cuadrado de binomio tenemos%
1−1 L−2 L2=1−1 L 1−2 L &2.2T(
6sando &2.2( y &2.2T( tenemos las si#uientes restricciones
12=−212=1
&2.2@(
10 Zer el Op5ndice O para una descripción más completa de este operador.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
11/37
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
12/37
2.12
Fig!" 2.4P!#$% A#!%g!%&i# AR/2
S%!i% * C#!!%(#g!"+"
Zamos a tener que usar una función adicional para identificar el orden del OU. Esta funciónes llamada función de autocorrelación parcial. "a identificación del orden del OU& p ( se hará sobre la
base de ambos correlo#ramas.
"a intuición función de autocorrelación parcial es simple. $upon#a que el verdadero procesoes OU& p (. 4ero parametri!amos &estimamos( los datos usando un modelo OU& p-1 (. $in demasiadaformalidad escribimos%
y t = AR p−1 y t −1t &2.==(
8Como sería Kt en este caso9 Xbviamente, no podría ser ruido blanco porque contiene tantolas verdaderas innovaciones t como el t5rmino p yt − p que no hemos incluido en el modelo. 4orlo tanto, Kt va a estar correlacionado con y t-p. Zamos a usar eactamente esta observación para
construir la función de correlación parcial y para determinar el orden p del modelo autore#resivo.Estudiemos la si#uiente covarian!a%
j*=cov [ y t − E [ yt | y t −1 , y t −2... y t − j 1] , y t − j ] &2.=:(
donde E es la me+or predicción lineal de y t hecha con sus propios j re!a#os. El primer t5rmino de lacovarian!a es el error de predicción de y t que se comete al usar un modelo lineal basado en j re!a#os.Cuando no hay covarian!a, si#nifica que el error de predicción no contiene información 7til para
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
13/37
2.1=
predecir y t porque no queda t5rminos del tipo y t-p omitidos del modelo. Osí, cuando j* es cero, ese
es el orden del modelo OU. /aturalmente, normali!amos la covarian!a parcial por la varian!a paraevitar problemas de unidades de medida.
6n e+emplo del uso de ambos correlo#ramas se muestra en la i#ura 2.J. El correlo#ramatotal presenta un patrón de caída suave aunque cíclico. Ello identifica un modelo tipo OU& p (. Elcorrelo#rama parcial muere s7bitamente en la se#unda correlación. Ello identifica el modelo comoun OU&2(.
Fig!" 2.,C#!!%(#g!"+" T#"( * P"!$i"( AR/2
Ra que hemos derivado la función de autocorrelación parcial, conviene pre#untarse por laforma que toma 5sta en el caso de un proceso de media móvil. Uecordando que todo WO puede ser
escrito como una OU&I( se deduce que el correlo#rama parcial tendrá infinitos t5rminos distintos decero. Odemás, como debe cumplirse la sumabilidad absoluta, el correlo#rama será decreciente.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
14/37
2.1:
2.0 PROCESOS A UTOREGRESIVOS Y DE MEDIA MÓVIL
/ada le impide a un proceso estocástico tener ambos componentes &OU y WO(, refle+andodistintas fuer!as que determinan la evolución de la variable, en cuyo caso los llamamos proceso OUWO& p4 (. /aturalmente, es posible interpretar un modelo OU o WO como un caso particular delmodelo OUWO. En t5rminos #en5ricos el OUWO& p4 ( es%
y t =1 y t −12 y t −2... p y t − pt 1t −12t −2...qt −q &2.=J(
Calcular la funciones de correlación total y parcial es directo pero tedioso. Opelamos anuestros conocimientos de modelos OU y WO para intuir cómo son dichas funciones%
• Uespecto del correlo#rama total, 5ste tiene ambos componentes hasta el re!a#o cuando la
parte WO de+a de operar y sólo queda la parte OU que decae suavemente con o sinoscilaciones.
• Uespecto del correlo#rama parcial, 5ste tiene ambos componentes hasta el re!a#o p cuandola parte OU de+a de operar y sólo queda la parte WO que decae suavemente con o sinoscilaciones.
"a combinación de ambos correlo#ramas nos permite determinar la naturale!a del proceso OUWO y el lar#o de re!a#os de cada componente.
2.0 IDENTIFICACIÓN DE PROCESOS ESTOCÁSTICOS ESTACIONARIOS
"as re#las de pul#ar para identificar procesos estocásticos se presentan en el Cuadro 2.1%
C"'!# 2.1R%g("& '% i'%)i5i$"$i-) '% 6!#$%& %&"$i#)"!i#&
P!#$% A#$#!!%("$i-) T#"( A#$#!!%("$i-) P"!$i"(
Uuido ?lanco Wuere s7bito en 8 Wuere s7bito en 8
WO& ( Wuere s7bito en Wuere suave &con o sin ciclos(
OU& p ( Wuere suave &con o sin ciclos( Wuere s7bito en p OUWO& p4 ( Wuere suave desde &con o sin ciclos( Wuere suave desde p &con o sin ciclos(
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
15/37
2.1J
2.07 FUNCIONES DE CORRELACIÓN A DMISIBLES Y EL TEOREMA DE 8OLD11
Ontes de avan!ar hacia la parte empírica de este tipo de modelos univariados &llamada
t5cnica de ?oANenins(, debemos pre#untarnos si es le#ítimo modelar una variable usando estametodolo#ía. [ay tres pre#untas que debemos responder% &1( 8qu5 nos permite ase#urar querepresentar una serie usando modelos OUWO& p4 ( es adecuado9, &2( 8qu5 nos hace pensar que alestudiar una función de autocorrelación podremos encontrar el verdadero modelo9 y &=( 8cómosabemos que una secuencia de n7meros efectivamente es una reali!ación de la función deautocorrelación de al#7n proceso estocástico de inter5s9
F)$i#)%& '% "#$#!!%("$i-) "'+i&i9(%&
/o toda secuencia de n7meros {1, ρ 1 , ρ 2 , ρ3, ...} corresponde a una función deautocorrelación de un proceso estocástico. Xbviamente debemos restrin#ir los valores de ρ para que
cumplan ̀ρi ̀ 1. 4ero ello no es necesariamente suficiente. Odemás se debe ei#ir que las varian!as ρ0 sean positivas. Consideremos un caso particular pero ilustrativo%
V [0 y t 1 y t −1]=0[0 1][ 1 11 1 ][ 01]≥0 &2.=(
3ado que *0 es positiva, entonces [ 1 11 1 ] tiene que ser positiva semiAdefinida. Osí, la 7nicarestricción necesaria es que ̀ρ1`1 &nótese que no hay restricciones sobre los coeficientes(.
$i el modelo tuviese un se#undo re!a#o, su varian!a quedaría descrita de manera análo#a a
&2.=(, ecepto que la matri! de correlaciones sería ahora [ 1 1 21 1 12 1 1
] . 4ara que dicha matri! seadefinida positiva, se debe cumplir que el determinante y los subdeterminantes sean positivos. Esto7ltimo requiere que ̀ρ1`1 y ̀ρ2`1, en tanto que el primero ei#e
12122−21
2−2 22≥ 0 ⇒ 2−21
2−12−1≤ 0 &2.=T(
pero como ̀ρ2`1, entonces se debe cumplir que
2−212−1≥ 0 ⇒ 2≥ 21
2−1 ⇒ −1≤
2−12
1−12
≤ 1 &2.=@(
esto impone restricciones a los valores de ρ2 dado los valores de ρ1. 4or e+emplo si este 7ltimo es 0.B,entonces 0.2 ρ2 1.
11 Zer la prueba del teorema en Phomas $ar#ent, ,ynamic *acroeconomics4 1B@T. "a demostración requiere conocer lamecánica de los espacios de [ilbert, pero es relativamente intuitivo.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
16/37
2.1
T%#!%+" '% 8#('
O7n si contamos con una secuencia de valores que pueda ser con#ruente con una función de
autocorrelación y, por necesidad, con una función de autocovarian!as de al#7n proceso estocástico,8qu5 nos permite ase#urar que es posible representar variables económicas con modelos OUWO9 Elsi#uiente teorema es la base del análisis de series de tiempo%
>ualuier proceso con media cero y estacionaria en covarianza ?y t @ puede ser representado demanera Anica por un componente lineal determin6stico y un componente lineal no determin6stico! .
y t = P * [ y t | y t −1 , y t −2... y t − p ]∑
i=0
∞
i t −i &2.=B(
donde B " es un predictor lineal y se cumple%
• t = y t − P *[ yt | y t −1 , yt −2 , ...] es un error de predicción.
• t es ruido blanco, es decir tiene media cero, varian!a constante, no covaría con
P *[ y t | y t −1 , y t −2 , ...] ni con los re!a#os de y t .
• 7 891 y se cumple ∑ j=0
∞
j2∞ &sumabilidad cuadrática(
• Podas las raíces de \&"( están fuera del círculo unitario.
8Cuál es el me+or predictor lineal de y t 9 4odemos aproimar este problema usando unmodelo OU con p re!a#os.
y t =∑i=1
p
i yt −i∑i=0
∞
i t −i &2.:0(
Este es un modelo OUWO. El primer t5rmino es un OU& p ( pero el se#undo es una mediamóvil de orden infinito. Xbviamente, 5ste no puede ser estimado con muestras aleatorias de tama'ofinito. 6samos como solución de compromiso buscar el me+or a+uste con re!a#os finitos.
y t =∑i=1
p
i y t −i∑i=0
q
i t −i &2.:1(
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
17/37
2.1T
Ol#unas observaciones importantes respecto del Peorema de Qold.
1. /o se requiere que los errores se distribuyan normal o sean i.i.d.
2. /o se requiere que E y t ,t =0 sino que P * y t ,t =0 . "a diferencia radica en que 4&(
es una proyección lineal, en tanto que E&( considera todas las posibles formas de proyecciónde y t , tanto lineales como no lineales.
=. "os errores t no tienen por qu5 ser las verdaderas innovaciones del proceso.
:. "a representación de la serie como un WO&I( es una posible representación del 3)4 de losdatos que captura el se#undo momento, no es la representación de la serie. Xtrasrepresentaciones pueden capturar, además, momentos de orden superior.
J. "a representación de la serie se#7n la ecuación &2.=B( es 7nica entre modelos lineales en quelos errores de proyección son lineales.
2.10 METODOLOGÍA DE BO:;
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
18/37
2.1@
2.11 >CÓMO V OLVER ESTACIONARIA UNA V ARIABLE?
"a metodolo#ía ?oANenins enfrenta el problema de remover la tendencia de las series
mediante dos t5cnicas básicas.1:
$i la variable es estacionaria basta con hacer una re#resión contrauna tendencia lineal y ocupar los residuos de dicha estimación. Considere la ecuación &2.:2(
y t = t L t &2.:2(
donde g y son dos parámetros y &"( es la representación media móvil de un modelo OUWO& p4 (para las innovaciones t . "a remoción de tendencia correspondería a obtener y t − − t . Estopuede ser hecho usando t5cnicas de mínimos cuadrados para filtrar la serie.
$i la variable no es estacionaria Mlo que se verifica cuando el correlo#rama muestral no cae olo hace demasiado lentoM se debe tomar la primera diferencia de la serie. Es decir,
1− L y t =!* L t &2.:=(
Eactamente cuándo se debe usar cada m5todo es lo que nos preocupará más adelantecuando se estudie el tema de raíces unitarias &ver Capítulo :(. En esta sección supondremos que eleconometrista sabe a-priori cuándo usar primeras diferencias o diferencias con respecto a unatendencia lineal.
Pambi5n es necesario remover los componentes determinísticos, tales como los efectosestacionales, usando al#7n tipo de filtro. $oto &2002(1J demuestra que los m5todos más populares dea+uste estacional &p.e., OUGWO jA11( no pueden ser considerados una simplificación inocente de los
datos sin p5rdidas sustanciales de información valiosa. El tratamiento estándar para remover laestacionalidad supone que la variable es estacionaria. $i este supuesto es correcto, $ims &1BT:(demuestra que la remoción de componentes estacionales usando un proceso de filtrado com7n paratodas las series mantiene las condiciones de con#ruencia del modelo ori#inal. )hysels y 4erron&1BB=(1, por otro lado, demuestran que la conclusión anterior no puede ser etendida a modelosdinámicos en los cuales se incluyen variables endó#enas re!a#adas. $oto &2002( demuestra que si elsupuesto de estacionariedad de la estacionalidad no se cumple, la remoción de componentesestacionales con m5todos tipo OUGWO jA11 es inadecuada porque induce correlación serial a7n si5sta no eiste en los datos ori#inales.
1: Como de costumbre, consideramos todas las variables en lo#aritmos, de modo tal que cambios en la variablecorresponden a su tasa de crecimiento.
1J O+uste Estacional e Gnte#ración en Zariables Wacroeconómicas, >uadernos de Econom6a , =B%1=JA1JJ, 2002.1 $ims, C. O. &1BT:(. $easonality in re#ression, 0ournal of t&e merican tatistical ssociation , B, 1@A2T. )hysels, E.
and 4. 4erron &1BB=(. Phe effect of seasonal ad+ustment filters on tests for a unit root, 0ournal of Econometrics &JJ(1A2. pp. JTAB@
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
19/37
2.1B
2.12 IDENTIFICACIÓN DEL TIPO DE MODELO ARMA
En las secciones anteriores hemos identificado los distintos tipos de modelos &OU, WO, OUWO( mediante el uso de correlo#ramas teóricos. $i tenemos una muestra finita, sin embar#o,tendremos estimadores de las correlaciones. Es decir, tendremos que hacer inferencias basados en laevidencia muestral, para lo cual es necesario determinar la distribución del correlo#rama muestral.
$i los datos son de un WO& ( con innovaciones )aussianas, entonces a partir del re!a#o lascorrelaciones muestrales debieran ser cero en valor esperado, pero como 5stas son una variableestocástica podrían ser num5ricamente distintas de cero. Como dichas estimaciones tienen varian!aello nos permite hacer intervalos de confian!a para la hipótesis nula H 0: j=0 . "a varian!a de lascorrelaciones es%
Va j" 1T [12∑
i=1
q
i2] j =q1,q2... &2.::(
4or ello, si el WO tiene innovaciones )aussianas el intervalo de confian!a para un test de lahipótesis nula j =0 de tama'o BJk es ! 2/# T .
1T
$i los datos provienen de un OU& p (, y considerando que la función de autocorrelación parciales%
y t = 1 " y t −1 2
" y t −2... " " y t −"t
* &2.:J(
entonces, el 7ltimo coeficiente gm debiese ser 0 en valor esperado si mDp. $u varian!a es%
Va " ""
1
T &2.:(
por lo que el intervalo de confian!a para el test de la hipótesis nula "=0 de tama'o BJk es
! 2/# T . Esto soluciona el problema de inferencia.
"a fi#ura 2. presenta #ráficamente dos simulaciones hechas para un OU&2( con parámetroscomunes, pero cambiando el tama'o de muestra. El panel de la i!quierda corresponde a una muestra
de 100 observaciones, el de la derecha corresponde a 1.000 observaciones. [ay dos elementosdestacables. 4rimero, la reducción de la incertidumbre en el estimador de la correlación. $e#undo, lamayor precisión de la estimación de las correlaciones. /o obstante, ambos #ráficos su#ieren que elmodelo es un OU&2(.
1T /ote que 5sta no es la varian!a asintótica estimada, la que requiere un estimador de 2_.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
20/37
2.20
Fig!" 2.E5%$# '%( T"+"@# '% M%&!" %) I'%)i5i$"$i-) %) ) AR/2
Pama'o de Wuestra 100 Pama'o de muestra 1.000
3ebe reconocerse que la identificación por correlo#ramas es, en la práctica, al#o difícilporque los correlo#ramas empíricos son menos nítidos que los correlo#ramas teóricos, sobre todoen muestras peque'as. 4or ello, la si#uiente etapa del m5todo de ?o y Nenins &estimación demodelos OUWO( es crucial. Estimar el modelo OUWO es relativamente directo por máima verosimilitud, pero lo vamos a ver paso por paso.
Ol#unos autores se'alan que se deben usar los correlo#ramas muestrales sólo para teneruna idea del tipo de proceso y su lar#o, pero que la clave consiste en ase#urar que los innovacionessean ruido blanco usando tests de dia#nóstico adecuados.
2.13 ESTIMACIÓN DE MODELOS A UTOREGRESIVOS
El caso del (1)
$ea y t =c yt −1t . ]ueremos construir la función de verosimilitud de la muestra queincluye y 1 4 y 4 ... 4 y n -. Como el modelo de y t depende de la observación anterior, tendremosproblemas computando para t91 porque no hay observación en t98. 4or eso, necesitamos computarla esperan!a y la varian!a no condicionales para la primera observación & y 1 (%
E [ y1]= c
1− V [ y1]=
2
1−2&2.:T(
"a función de densidad noAcondicional de y 1, si la innovación es )aussiana, es%
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
21/37
2.21
# y1 $= 1
# 2
1
# 2/1−2
%[− y1−c /1−
2
22/1−2 ] &2.:@(
"a función de densidad de y condicional en haber observado y 1 es%
# y2 | y 1 $ = 1
# 2 2
%[− y 2−c− y1
2
2 2 ] &2.:B(
/ote que para la densidad de y condicional en y 14 el valor observado de y 1 es una constanteno una variable aleatoria. Entonces, E [ y2]=c y1 y la 7nica varian!a es la del error _ t, por lo que
y se distribuye N c y1 , 2 (. En #eneral, las densidades condicionales para los datos desde 2 a
n se pueden escribir como%
# y t | y t −1 , y t −2 ... y1 $ = # y t | yt −1 $ = 1
# 2 2%[− yt −c− y t −12 2 ] &2.J0(
3ado que los y i son independientes, la densidad con+unta de la muestra es el producto de lasmar#inales. 4ara la primera y se#unda observación es%
# y2, y1 $= # y2 | y1 $ # y1 $ &2.J1(
4odemos hacer esto para todas las observaciones y i de la muestra y obtener la función de
verosimilitud eacta%
ℒ =$t =2
/
f y t ` y t −1 + % f F 1 y 1 + &2.J2(
Pomando lo#aritmos%
lo# ℒ = lo# f y 1 + ∑t =2
/
lo# f y t ` y t −1 + &2.J=(
o, lo que es equivalente%
lo# ℒ =−1
2 lo# 2−
1
2 lo#
2
1−2− y 1−c /1−
2
22 / 1−2
−/ −12
lo# 2−/ −1
2 lo# 2−∑
t =2
/ y t −c − y t −12
22
&2.J:(
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
22/37
2.22
Esta función se optimi!a por cálculo num5rico1@. [ay que reconocer, no obstante, que laestimación puede ser en#orrosa, en particular porque los m5todos de optimi!ación directa de lafunción de verosimilitud son sensibles a los puntos de partida y al al#oritmo de estimación. 6na
alternativa práctica es optimi!ar la densidad condicional en y 1
f y t 4 y t −1 4 y t −2 ...` y 1 + =$t =2
/
f y t ` y t −1 + &2.JJ(
entonces
lo# ℒ =−/ −1
2lo# 2−
/ −1
2lo# 2 −
∑t =2
/
y t −c − y t −12
2 2&2.J(
"a ecuación &2.J( tiene tres componentes, de los cuales los primeros dos son constantes.4or ello, maimi!ar lo# &\( es equivalente a minimi!ar el 7ltimo t5rmino. 4ero esto 7ltimo esℒ equivalente a hacer una re#resión de mínimos cuadrados ordinarios. Osí, la maimi!ación de ladensidad condicional en y 1 de la muestra produce estimadores de los parámetros que sonequivalentes a los obtenidos por una re#resión X"$ de y t en sus re!a#os. Este resultado se etiendedirectamente a un proceso OU& p (.
2.14 ESTIMACIÓN DE MODELOS MEDIA MÓVIL
E&i+"$i-) '% ) M#'%(# MA/1
$ea y t =t t −1 . Como vimos en el caso del modelo OU, maimi!ar la densidadcondicional es más simple que hacerlo sobre la densidad eacta. En el caso del WO&1(condicionamos sobre _tA1.
y t `t −1↝ ) [t −1 4 2 ] &2.JT(
"amentablemente, no es posible estimar este proceso por mínimos cuadrados ordinarios. 3ehecho, el problema es más comple+o de lo que parece% para estimar \ se necesitan los residuos peropara determinar los residuos se necesita estimar \. 4or ello necesitamos un al#oritmo iterativo%
• $i sabemos que G 80, entonces, y t `0=0↝
) [ 42
] . Entonces y 19 G 1. • $i conocemos y 1, entonces podemos conocer G 1 9 y 1- H.• $i conocemos y y G 1, obtenemos G 9 y - H I 7G 1• $i conocemos y J y G , obtenemos G J 9 y J - H I 7G 4 etc.
3e esta forma, tenemos toda la secuencia de G t condicional en G 8 0.
1@ Capítulo de otas de >lases EE-JK8
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
23/37
2.2=
4odemos formar entonces la densidad con+unta condicional y la función de verosimilitudcondicional%
lo# ℒ =−/ −12
lo# 2− / −12
lo# 2 − 12 2 ∑t =1
/
t 2 &2.J@(
El problema de la ecuación &2.J@( es que no podemos estimarla. "a 7nica solución es darle\0, computar las innovaciones G t 4 obtener y optimi!ar lo# &\( determinando un nuevo con+unto deℒ parámetros \1 e iterar hasta que la función de verosimilitud conver+a. $i `\` es peque'o, el efecto desuponer G 8 0 es poco importante y desaparece lue#o. $i `\`1, el al#oritmo diver#e.
Este mismo al#oritmo se utili!a para estimar un WO& (, sólo que deberemos darle parámetros iniciales.
2.1, ESTIMACIÓN DE UN MODELO ARMA
"a aproimación a la función de verosimilitud en el caso de los OU fue condicionada a los y piniciales. "a aproimación a la función de verosimilitud en el caso de los WO fue condicionada a losG iniciales. "a aproimación a la función de verosimilitud de los OUWO, naturalmente, condicionarespecto de los y p y G iniciales.
lo# ℒ =−/
2lo# 2−
/
2lo# 2−
1
2 2∑t =1
/
t 2 &2.JB(
t
= y t
−c −1
y t −1
−2
y t −2
−...− p
y t − p
−1
t −1−
2
t −2
...−
t −
&2.0(
2.1 PREDICCIONES CON MODELOS ARMA 1B
"a predicción de una variable económica envuelve dos dimensiones% el valor que se esperaque la variable tome en el período t"j y, debido a la aleatoriedad de los modelos econom5tricos, laimprecisión o varian!a de la predicción. Es decir, queremos%
E [ y t j ]= E[ y t j ` y t j −1 4 y t j −2 4 ... 4t 4t −1 4 ...]
L [ y t j ]=L [ y t j ` y t j −1 4 y t j −2 4 ... 4t 4t −1 4 ...]&2.1(
1B =a predicción es al#o muy dif6cil4 sobre todo acerca del futuro, /iels ?ohr.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
24/37
2.2:
P!%'i$$i-) '% ) +#'%(# AR/1
Consideremos el modelo y t = y t −1t , entonces
Et [ y t 1 ]= E t [ y t t 1 ]= y t Et [ y t 2 ]= E t [ y t 1t 2]=
2 y t
Et [ y t = ]= E t [ y t 2t =]== y t
⋮
Et [ y t j ]= E t [ y t j −1 t j ]= j
y t
&2.2(
/ótese que la predicción del OU&1( es su representación de media móvil de orden infinito. Odemás, si tomamos la predicción en el infinito &es decir, el límite cuando +HI(, vemos que es cero,lo que es ra!onable en un proceso estacionario con media no condicional cero%
lim j M∞ E t y t j =0= E [ y t ] &2.=(
recuerde que los momentos noAcondicionales son los límites de los momentos condicionales.
4or otro lado la varian!a de la predicción es%
L t [ y t 1 ]=L t [ y t t 1]=2
L t [ y t 2]=L t [ y t 1t 2 ]=12
2
L t [ y t = ]=L t [ y t 2t = ]=12:
2
⋮L t [ y t j ]=L t [ y t j −1t j ]=1
2...2 j −1 2
&2.:(
3e la ecuación &2.:( se desprende que la imprecisión de la predicción es creciente en eltiempo. /uevamente, tomamos el límite de la varian!a para descubrir que la incertidumbre en elproceso estacionario crece con j pero está acotada%
lim j M∞ L t y t j =1
1−2
2=L [ y t ] &2.J(
Este análisis puede etenderse tediosamente aunque sin dificultades analíticas para el OU& p (.Eiste una t5cnica que estudiaremos más adelante que permite escribir un OU& p ( como si fuese un OU&1( de modo de computar las predicciones y sus varian!as de acuerdo a las ecuaciones &2.:( y&2.J( fácilmente.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
25/37
2.2J
P!%'i$$i-) '% ) +#'%(# MA/
Como hemos visto, la predicción de un modelo OU& p ( es equivalente a obtener su
representación WO&I( y tomar esperan!a y varian!a de la predicción. En el caso del WO& ( esto esdirecto. $i consideramos el modelo y t =t 1 t −12 t −2... t − , entonces%
E[ y t j ]= E [t j 1t j −12t j −2...( t j −( ]
b j t j 1t −1...( t j −( &2.(
donde nuevamente en el límite, la predicción condicional equivale a la noAcondicional. 4or otro ladola varian!a de la predicción es%
L [ y t j ]=L [t j 1 t j −1... t j − ]=1 j 2 j 1
2 ... 2
2&2.T(
donde es evidente que en el límite & j HI( la varian!a es una constante.
"as predicciones de modelos OUWO son llamadas a menudo las Sfunciones impulsoArespuestaS. "a ra!ón es que si pensamos en el efecto de una innovación que toma valor 1 en elinstante 0 y cero en adelante, lo que obtenemos es eactamente lo descrito por las ecuaciones depredicción del OU& p ( o del WO& (.
Uecordemos, sin embar#o, que hemos usado modelos sin tendencia, sin estacionalidad, sinmedia y a veces en diferencias, por lo que las predicciones de estos modelos en realidadcorresponden más bien a simulaciones de los modelos que a predicciones SrealistasS &se pueden
obtener estas 7ltimas a'adiendo los componentes que hemos removido(. /o obstante, podemosentender bastante de la dinámica de las variables económicas estudiando su respuesta frente ainnovaciones.
2.1 SIMULACIÓN ISTÓRICA CON MODELOS ARMA
6na ve! estimado el OUWO& p4 (, predecir es relativamente simple. 3ado el modelo%
y t =1 y t −12 y t −2... p y t − pt 1 t −12 t −2... t − &2.@(
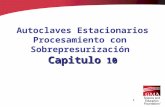
&O( podremos predecir usando los p re#a!os de y t y los re#a!os de G t . Este tipo de simulaciónse llama predicción estNtica . Zer i#ura 2.T.
&?( podremos predecir usando los p re#a!os de y t y los re#a!os de G t ya predichos por elmodelo en iteraciones anteriores. Este tipo de simulación se llama predicción dinNmica . Zer i#ura 2.@.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
26/37
2.2
i#ura 2.T4redicción Estática
i#ura 2.@4redicción 3inámica
2.1 V ALIDACIÓN DEL MODELO ECONOMTRICO ARMA
6na ve! estimado el modelo, tenemos que estar se#uros que 5ste ten#a sentidoeconom5trico. Ol#unas re#las 7tiles al respecto son%
• "os residuos deben ser ruido blanco &sin estructura(. Eisten numerosos test de verificaciónque los residuos son no correlacionados &p.e., "+un#A?o, ?oA4ierce, etc(.
• El a+uste del modelo debe ser Sra!onableS. Considere que, como lo que un modelo OUWOeplota es la memoria de las series, la bondad de a+uste debe ser alta.
• "a si#nificancia de los parámetros individuales es irrelevante, porque va a haber colinealidad./o obstante, la si#nificancia de los parámetros en bloque es relevante &test con (.
• [ay que tener cuidado con el problema de sobreparametri!ar & overfittin# (. 3ebido a queestamos traba+ando con polinomios, mientras más polinomios usemos el UL tenderá a crecer.6n criterio más preciso que la identificación visual de los correlo#ramas son los tests delar#o de re#a!os. Entre los más comunes están aquellos de Scontenido informacionalS, queconsisten en hacer un trade-off entre a+uste &medido por la suma de residuos al cuadrado( yeceso de parámetros & 5 ( respecto del tama'o de muestra &P(%
• Pest de Oaie% min −2 lo# ℒ
P
2c
P
• Pest de $ch>art! min −2lo# ℒ
P
lo# P
P
• Pest de [annanA]uinn min −2lo# ℒ
P
2 lo# lo# P
P
-.20
-.15
-.10
-.05
.00
.05
.10
.15
1980 1985 1990 1995 2000
-.15
-.10
-.05
.00
.05
.10
.15
.20
1980 1985 1990 1995 2000
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
27/37
2.2T
A PNDICE A OPERADOR DE R EAGOS
1. El operador de re!a#os = es definido como% =y t = y t −1 .
2. $i se aplica repetidamente el operador = a la variable y t se obtiene%=
p y t == ∘ = ∘ = ... ∘ = = y t − p .
=. El operador tiene función inversa "A1, de modo tal que ""−1 y t == −1
=y t = y t
:. El operador es lineal, = −1 y t = = −1
=y t = y t −1 .
J. /ote que 1− = −1=1 = 2 = 2 ... .
. $e puede usar el operador para definir un operador similar que se utili!a en modelosmultivariados, llamado el operador de re!a#os polinomial. Este se define como= =1−1 = −2 =
2−...− p= p . Ol i#ual que en el caso anterior, este operador tiene inversa
= = −1 y t == −1 = y t = y t .
T. 4ropiedades del operador polinomial de re!a#os%
a. Wultiplicación% a = b = =a 0a 1 = ... b 0b 1= ...
b. 4ropiedad conmutativa% a = b = =b = a =
c. 4otencias enteras positivas% a = 2=a = a =
d. Gnversión% a = =1− O 1 1− O 2⇒ a = −1=1− O 1
−1 1− O 2−1
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
28/37
2.2@
A PNDICE B CÓDIGO G AUSS PARA SIMULACIÓN DE MODELOS ARMA
/* PROGRAMA QUE SIMULA CUALQUIER TIPO DE ARMA(p,q) y COMPUTA AUTOCORRELACIONES TOTALES Y
PARCIALES */
new;c!;"#$%$y p&$%p';L%$& e % !e$"e (+-) ;;en.cn(,); /* p"e %$& e %0! e!e % cn!% */p.;q.;
Ce1"c"en0e! e p$ce! ARMA(p,q) ;O$en e p2 ;; /* p"e %$& e AR e!e % cn!% */p.cn(,);"1 p ne ;
In&$e!% ce1"c"en0e! e % p%$0e AR2 ;;p'".cn(p,);
en"1;O$en e q2 ;; /* p"e %$& e MA e!e % cn!% */
q.cn(,);"1 q ne ;
In&$e!% ce1"c"en0e! e % p%$0e MA2 ;;
0'e0%.cn(q,);0'e0%.30'e0%;
en"1 ;
%0%.$nn(en-+,); /* c$e% w'"0e n"!e, cn + #!e$4%c"ne! e50$% */
"1 p.. %n q..;0"0.R6" 7%nc; /* n8#$e !e$"e */!e$"e.0$"8$(%0%,+,); /* q6"0% + %0! e50$% */
e!e"1 p.. %n q9;
1"e.;18%0.:**1;#.10!(q,18%0,1"e,); /* cn4"e$0e n68e$ e $e.en-+; .; %65.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
29/37
2.2B
1"e.;18%0.:**1;#p.10!(p,18%0,1"e,);#q.10!(q,18%0,1"e,);0"0.ARMA( =-#p=-,=-#q=-); /* n8#$e !e$"e */
%$.ne!(en-+,)*;".8%5c(p3q)-; /* c$e% %0% AR(p) */ w'"e ">.en-+; .; %65p.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
30/37
2.=0
enp;
p$c(J).8y%60(%0%);c% .
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
31/37
2.=1
A PNDICE C E
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
32/37
2.=2
b( $upon#a ahora que g 1. 8Es un estimador consistente de g9 Encuentre la distribuciónlímite del estimador.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
33/37
2.==
A PENDICE D METODOLOGÍAS DE R EMOCIÓN DE ESTACIONALIDAD PARA V ARIABLES ESTACIONARIAS
Entre los m5todos más comunes para remover la estacionalidad están el uso de variablesmudas estacionales y el m5todo de promedios móviles, que incluye desde la variación en Aperiodos hasta el OUGWO jA11. Esta 7ltima es la metodolo#ía más popular tanto porque su nivelde desarrollo analítico es superior, como porque viene implementada como una opción sencilla deusar en muchos pro#ramas econom5tricos.
En esta sección consideramos las dos principales metodolo#ías de remoción de laestacionalidad que parten de la base que las series son estacionarias% el m5todo de las variablesmudas & dummies) y la metodolo#ía jA1120. Estas son las metodolo#ías más anti#uas y, pese a ser a7npopulares, son limitadas e imponen fuertes restricciones a la naturale!a estocástica de las series y de
la estacionalidad.
MF2#'# '% R%g!%&i-)
Esta es, probablemente, la manera más simple de remover componentes estacionales. /oobstante es la que impone mayores restricciones sobre las características que debe cumplir elfenómeno de estacionalidad. En el m5todo de re#resión se utili!a una serie de variables mudas paracapturar los efectos estacionales%
y t =01 , 1 2, 2 5 , 5 x t t
donde cada variable 3i toma valores 1 en el periodo que 5sta representa &p.e., enero de cada a'o( ycero en cualquier otro periodo. El modelo &1( puede ser etendido para incluir otras variableseplicativas o un proceso más comple+o Maunque estacionarioM para el error &p.e., un OUWO(.
En la medida que los coeficientes i sean estadísticamente si#nificativos, habrán componentes
estacionales. Consecuentemente, la serie desestacionali!ada y t se calcula como%
y t e= y t − 1 , 1− 2, 2−− 5 , 5
donde i son los parámetros estimados para cada componente estacional que resultensi#nificativos.
Como resulta evidente, al modelar la estacionalidad de esta manera se asume que el efectoestacional sea determinístico &o constante en valor esperado(, es decir que en cada a'o el cambio enla variable por ra!ones estacionales sea eactamente el mismo. Ello no es un supuesto adecuado paramuchas de las variables económicas debido a que el comportamiento estacional se determina pornumerosas y muy hetero#5neas fuentes, lo que su#iere que 5ste sea modelado como una variablealeatoria.
20 "a metodolo#ía de la variación en x Aperiodos implícitamente supone que la serie es no estacionaria Mal menos en elcomponente estacionalM por lo que su descripción se incorpora en la sección :.2.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
34/37
2.=:
El uso de variables mudas para modelar estacionalidad en un análisis de re#resión presenta elproblema de inducir correlaciones esp7reas entre las variables &Obeysin#he, 1BB:a(, en tanto que suuso para predecir variables en modelos de series de tiempo &p.e., OUGWO, ZOU( produce
predicciones fuera de muestra que son de peor calidad que las que se obtienen de otros m5todos &jA11 o la variación en x Aperiodos(, en especial en modelos multivariados &Obeysin#he, 1BB:b(.
/o obstante, este m5todo satisface al#unas características que son deseables en cualquierm5todo de remoción de estacionalidad% que se preserve el promedio de la serie ori#inal, que loscomponentes estacionales sean orto#onales entre sí, y que al aplicar el m5todo a la seriedesestacionali!ada no se obten#an nuevos factores estacionales &idempotencia(.
4ese a su popularidad, las metodolo#ías tradicionales tienen #randes limitaciones.Gmplícitamente, ellas suponen que la variable que se desea desestacionali!ar cumple determinadaspropiedades estadísticas, las que usualmente no son verificadas previamente en los datos. Ol#unast5cnicas suponen que los factores estacionales son determinísticos en tanto que otras asumen que
5stos son estocásticos y estacionarios. En #eneral, estas metodolo#ías requieren que las seriesori#inales sean estacionarias para estimar adecuadamente los componentes estacionales.Gnadvertidamente, al#unos m5todos imponen estructuras dinámicas que las variables nonecesariamente poseen &p.e., la variación en x Aperiodos(. Cuando dichas propiedades no se verifican,las metodolo#ías de remoción del componente estacional entre#an series filtradas que presentanfuertes distorsiones y que pueden llevar a mala especificación en modelos o a conclusionesequivocadas cuando 5stas se usan para hacer tests de hipótesis.
Wás allá de las limitaciones t5cnicas de los distintos m5todos de desestacionali!ación, eisteuna ra!ón más profunda para investi#ar el comportamiento estacional de las principales variablesmacroeconómicas y que se relaciona con nuestro conocimiento de las fuentes y efectos de lasfluctuaciones de la economía. ?eaulieu y Wiron &1BBJ( se'alan que, en ocasiones, el estudio de los
componentes estacionales puede convertirse en una herramienta 7til para comprender la estructurade los ciclos económicos. "a ra!ón fundamental para ello es que el estudio de ciclos requiereimponer condiciones de identificación sobre los shocs &transitorios, permanentes( que afectan a la variable de inter5s, de la misma manera que se hace para distin#uir en un mercado cualquiera losshocs de oferta y demanda. $e#7n estos autores, resulta más creíble imponer dichas restriccionessobre los componentes estacionales que sobre los componentes fundamentales.
MF2#'# '% (#& P!#+%'i#& M-.i(%&
El más conocido de los m5todos de promedios móviles es el jA11 &y su versión másmoderna, el OUGWO jA12( populari!ado por el 6.$. ?ureau of the Census. El punto de partida de lametodolo#ía es el teorema de Qold que demuestra que cualquier serie de tiempo estacionaria puedeser descompuesta en tres componentes básicos% una tendencia determinística, un componenteestacional, y un con+unto de innovaciones &[amilton, 1BB:(.
En líneas #en5ricas, la metodolo#ía se compone de dos etapas que funcionan de maneraindependiente. El ob+etivo de la primera etapa es eliminar de la serie aquellas observacionesSetremasS que, de no ser eliminadas, podrían distorsionar la medición de los componentesestacionales. 4ara ello, se estima un modelo OUGWO que incluye re#resores &dummies( para capturarefectos de eventos especiales &feriados, a'os bisiestos, etc.(, observaciones atípicas &outliers(,
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
35/37
2.=J
cambios de niveles de las series &quiebres(, tendencia y un con+unto de variables mudas que operancomo estimadores preliminares de la estacionalidad. El modelo OUGWO se esco#e de modo tal quesatisfa#a varios requisitos, entre ellos un ba+o error de predicción fuera de muestra, ausencia de
correlación y estacionariedad de residuos. 6na ve! estimado el modelo OUGWO se reali!an dostransformaciones a la serie ori#inal% &1( se reempla!an los valores etremos por valores filtradoseliminándose la posible distorsión, y &2( se predice un cierto n7mero de periodos &típicamente 2a'os( fuera de cada etremo de la muestra y se a'aden los valores predichos a la serie ori#inal. Elob+etivo de esto 7ltimo se describe a continuación.
En la se#unda etapa se estiman los componentes estacionales por medio de promediosmóviles. En una primera parte, se estima el componente de tendencia de la serie transformada en laetapa anterior utili!ando los llamados promedios móviles de [enderson. El promedio móvil de[enderson es un promedio ponderado de manera decreciente de =, J, T, ... observaciones centradoen la observación de inter5s, por lo que considera valores pasados y futuros. El n7mero deobservaciones es frecuentemente seleccionado de modo automático por el pro#rama. En la se#unda
etapa, se estiman los componentes estacionales de la serie a+ustada en la primera etapa a la cual se lehan eliminado adicionalmente los componentes de tendencia. El papel que cumplen lasobservaciones a'adidas en la primera etapa es me+orar el cálculo de los componentes estacionalesusando promedios móviles en los etremos de la muestra donde la información está truncada.
El procedimiento para datos trimestrales es el si#uiente ¶ datos mensuales elprocedimiento es análo#o(%
$e transforman los datos usando la t5cnica de ?o y Co &1B:(.
$e filtran las series de la si#uiente manera% x t =[ 0.J y t 2 y t 1 y t y t −1 0.J y t −2 ]
:
$e obtiene la serie r t = y t
x t
$e calculan los índices estacionales, i, como el promedio de los valores de r estimados paracada trimestre &por e+emplo, para el primer trimestre se usan r1, rJ, rB, ...(.
$e normali!an los índices estacionales para preservar la media de la serie ori#inal de la
si#uiente manera% s i =
i (
# i 1 i 2 i = i :
$e obtiene la seria desestacionali!ada como y t =
y t s i
y se verifica que la modelación es
adecuada haciendo tests de especificación y de estacionalidad residual.
Ounque el m5todo OUGWO jA11 es muy popular no está eento de limitaciones. En primerlu#ar, el m5todo produce en la mayor parte de las aplicaciones prácticas un filtro no lineal, porque en
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
36/37
2.=
los subfiltros se utili!an promedios de [enderson con distinto n7mero de re!a#os determinados demanera endó#ena en función de la presencia de valores etremos en los datos &)hysels y 4erron,1BB=(. Ello distorsiona las propiedades dinámicas de las series. $e#undo, el filtro induce correlación
en datos distantes producto del uso de promedios móviles de [enderson que no necesariamenteeiste en las series ori#inales. Percero, para varias clases de modelos el uso de un OUGWO para lapredicción en las puntas de la muestra utili!ando variables epresadas en lo#arítmos produce unses#o sistemático hacia aba+o en las series a+ustadas por estacionalidad &ranses, 1BBT(. "a ma#nitudy sentido del ses#o son desafortunadamente, desconocidos porque dependen de la estructuraparticular de cada muestra y modelo. Cuarto, el tratamiento de los componentes irre#ulares &pore+emplo, $emana $anta que cae en distintos días del mes de abril de cada a'o( no es necesariamenteóptimo en esta metodolo#ía, favoreci5ndose su remoción por m5todos indirectos previos al filtradode los datos con jA11 &"ee, 1BB@(.
-
8/18/2019 Modelos de Series de Tiempo Estacionarios Univariados
37/37
2.=T
C#)%)i'#&
Capítulo 2..................................................................................................................................................1Wodelos de $eries de Piempo ..............................................................................................................1Estacionarias 6nivariados......................................................................................................................12.01 4rimera Uepresentación undamental de un 4roceso Estocástico.......................................12.02 Estacionariedad y Er#odicidad.....................................................................................................12.0= unción de Outocorrelación.........................................................................................................=2.0: 4roceso Uuido ?lanco..................................................................................................................:2.0 4rocesos Outore#resivos..............................................................................................................@2.0T 4rocesos Outore#resivos y de Wedia Wóvil.............................................................................1:2.0@ Gdentificación de 4rocesos Estocásticos Estacionarios........................................................1:
2.0B unciones de Correlación Odmisibles y el Peorema de Qold............................................1J2.10 Wetodolo#ía de ?oANenins.....................................................................................................1T2.11 8Cómo Zolver Estacionaria una Zariable9...............................................................................1@2.12 Gdentificación del Pipo de Wodelo OUWO..............................................................................1B2.1T $imulación [istórica con Wodelos OUWO............................................................................2J2.1@ Zalidación del Wodelo Econom5trico OUWO.......................................................................2 Op5ndice O% Xperador de Ue!a#os.................................................................................................2T Op5ndice ?% Códi#o )auss para simulación de modelos OUWO..............................................2@ Op5ndice C% E+ercicios.......................................................................................................................=1 Opendice 3% Wetodolo#ías de Uemoción de Estacionalidad para Zariables Estacionarias... ==
6ltima corrección% 2@0J0T