Boletin Mayo - Capacitaciones en Democracia Inclusiva, observadores internacionales

Centro Nacional de Investigacion y Desarrollo Tecnologico
Departamento de Ingenierıa Electronica
TESIS DE MAESTRIA EN CIENCIAS
“Modelado, control y observadores de estado enintercambiadores de calor”
presentada por
Omar Hernandez GonzalezIng. Electronico por el I. T. de Minatitlan
como requisito para la obtencion del grado de:
Maestrıa en Ciencias en Ingenierıa Electronica
Directores de tesis:Dr. Carlos Manuel Astorga Zaragoza
Dr. Arturo Zavala Rıo
Cuernavaca, Morelos, Mexico. Mayo de 2008


Centro Nacional de Investigacion y Desarrollo Tecnologico
Departamento de Ingenierıa Electronica
TESIS DE MAESTRIA EN CIENCIAS
“Modelado, control y observadores de estadoen intercambiadores de calor”
presentada por
Omar Hernandez GonzalezIng. Electronico por el I. T. de Minatitlan
como requisito para la obtencion del grado de:
Maestrıa en Ciencias en Ingenierıa Electronica
Director de tesis:Dr. Carlos Manuel Astorga Zaragoza
Co-Director de tesis:Dr. Arturo Zavala Rıo
Jurado:
Dr. Victor Manuel Alvarado MartınezM.C. Pedro Rafael Mendoza EscobarDr. Carlos Manuel Astorga Zaragoza
Cuernavaca, Morelos, Mexico. Mayo de 2008


Dedicatoria
Dedico este trabajo:
A Dios, ya que siempre ha estado conmigo. Ademas por concederme la
vida, inteligencia y sabidurıa, para conducirme por un buen camino, gracias
por amarme, ¡Estas en mi corazon!.
A mi padres Jesus e Irma, por el apoyo, el amor y los valores que toda la
vida me han dado de corazon; sin ustedes no hubiera sido posible alcanzar
todas las metas propuestas hasta ahora, espero seguir contando con ustedes
para las siguientes, ¡Los amo!.
A mi hermana Olivia por amarme y apoyarme en todos los momentos de
mi vida.
A mis familias Hernandez Balboa y Gonzalez Perez, por estar cerca
de mi siempre. De un modo muy particular a mis tıas Silvia y Haydee,
ya que siempre he contado con su apoyo y su amor incondicional.
A mi nina Eusebia, por estar siempre conmigo y por su amor tan grande,
¡Te amo BABI!.


Agradecimientos
Agradezco:
A Dios y a mis padres, porque siempre he contado con su apoyo y amor en
todos los momentos de mi vida.
Agradezco a mis asesores el Dr. Carlos Manuel Astorga Zaragoza y el Dr.
Arturo Zavala Rıo por guiarme en este trabajo de investigacion mediante
sus invaluables consejos y observaciones, tambien agradezco la confianza
que depositaron en mi.
Al Dr. David Juarez Romero por sus ensenanzas, comentarios y consejos
sugeridos durante el desarrollo de la tesis.
A los miembros del comite revisor: Dr. Victor Manuel Alvarado Martınez
y al M.C. Pedro Rafael Mendoza Escobar por los valiosos comentarios que
enriquecieron este trabajo.
A mis profesores: Dr. Gerardo Vicente Guerrero, Dr. Hugo Calleja Gjum-
lich, Dr. Alejandro Rodrıguez Palacios, Dr. Marco A. Oliver Salazar, Dr.
Carlos Daniel Garcia Beltran, Dr. Luis Gerardo Vela Valdes y Dr. Enrique
Quintero-Marmol, por todos los conocimientos brindados.
A mis companeros y a mis amigos: Toy, Paco, Isaura, Dana, Gisela,

Miguel, Ronay, Benedicto, Manuel, Ivan, Jorge Luis, Nacho, Pacheco,
Diego, Adriana T., Adriana A., Beto, Leetch y Aristeo, por todos los buenos
momentos que pasamos juntos, agradezco a Eusebia, por estar conmigo en
todo momento, por ser parte de su vida, ¡Gracias por todo, Te amo!.
Al CENIDET por permitirme crecer profesionalmente; y a todo el personal
que labora en el centro, por todas las finas atenciones prestadas durante mi
estancia. Ası mismo al IPICYT por la estancia academica realiza en esta
institucion.
Finalmente a CONACYT y a la DGEST por el apoyo economico que me
brindaron para la realizacion del trabajo.

Modelado, control y observadores de estados para
intercambiadores de calor
Autor
Omar Hernandez Gonzalez
(RESUMEN)
En este tema de tesis se desarrolla un modelo matematico de un intercambiadorde calor tipo helicoidal enchaquetado, considerando un balance de energıa. Para la vali-dacion del modelo se presentan pruebas experimentales realizadas en la planta piloto dela columna de destilacion binaria, ya que en esta se encuentra el intercambiador de calor,el cual funciona como condensador.
Dicho modelo matematico permite desarrollar algoritmos de estimacion de estadosy un parametro interno, a traves de observadores de estados. Dicho parametro a estimares el coeficiente de transferencia de calor U de una seccion del intercambiador de calor.Con la estimacion se puede observar el deterioro del coeficiente de transferencia de calor,debido a la acumulacion de fouling. Para validar los observadores propuestos se utilizandatos experimentales obtenidos de la planta piloto de la columna de destilacion binaria.
Por otro lado se propone un controlador para la regulacion de la temperatura desalida de un intercambiador de calor tipo tubos concentricos, el cual considera la dinamicadel sistema y los lımites fısicos de la entrada de control, ademas no necesita conocer losparametros internos del intercambiador de calor. El algoritmo se nombra controladoracotado positivo. Para evaluar el funcionamiento del controlador propuesto se realizanpruebas en simulacion y experimentales en el banco de regulacion de temperatura; laspruebas experimentales se realizaron en configuracion de los fluidos del intercambiador decalor: contraflujos y paralelos. Ademas se realizan pruebas experimentales en presenciade disturbios y sin ellos.
Por ultimo, se realizaron pruebas en simulacion y experimentales en el banco de regu-lacion de temperatura, con el controlador proporcional-integral y un controlador no linealpor retroalimentacion de estados, con el fin de compararlos con respecto al controladorpropuesto en este tema de tesis.


Modeled, control and state observers for heat
exchangers
Autor
Omar Hernandez Gonzalez
(ABSTRACT)
In this thesis is developed a mathematical model of jacketed coil heat exchanger,considering a energy balance. For the validation of the model are presented experimentaltests made in the bench-scale binary distillation column, since in this one is the heat ex-changer, which works like condenser.
This mathematical model allows to develop to algorithms of internal parameter andstate estimation, through states observers. This parameter to estimate is the heat transfercoefficient U of a section of the heat exchanger. With the estimation the degradationof the heat transfer coefficient can be observed, due to the accumulation of fouling. Inorder to validate the proposed observers are obtained experimental data of the bench-scalebinary distillation column.
On the other hand is proponed a controller for the regulation of the outlet temper-ature of a double-pipe heat exchanger, which considers the dynamics of the system andthe physical limits of the control input, moreover it does not need to know the inter-nal parameters of the heat exchanger. The algorithm is named bounded positive control.In order to evaluate the operation of the controller proposed are made tests in simula-tion and experimentally in the pilot plant heat exchanger; the experimental tests weremade in configuration of the fluids of the heat exchanger: counter flow and parallel flow.In addition are made experimental tests in the presence of disturbances and without them.
Finally, were made simulation and experimental tests in the pilot plant heat ex-changer, with the proportional-integral controller and a non-linear controller by feedbackof states, with the purpose of comparing them with respect to the controller proposed inthis thesis.


Tabla de Contenido
Lista de figuras V
Lista de tablas IX
Notacion XI
1. Introduccion 1
1.1 Planteamiento del problema: . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Hipotesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Objetivo general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.1 Objetivos especıficos . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Alcances y limitaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Motivacion y justificacion . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.6 Aportaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.7 Estado del arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.7.1 Observadores de estados adaptables . . . . . . . . . . . . . . . . . . 9
1.7.2 Controladores aplicados a intercambiadores de calor . . . . . . . . . 10
1.8 Degradacion del funcionamiento en los intercambiadores de calor . . . . . . 11
I

1.9 Metodologıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.10 Organizacion del documento . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2. Modelado de intercambiadores de calor tipo helicoidal enchaquetado 15
2.1 Condensador de la columna de destilacion . . . . . . . . . . . . . . . . . . 15
2.2 Modelo del condensador de la columna de destilacion binaria . . . . . . . . 17
2.2.1 Modelo de la columna de destilacion . . . . . . . . . . . . . . . . . 17
2.2.2 Modelo del condensador tipo helicoidal enchaquetado . . . . . . . . 18
2.3 Validacion del modelo del intercambiador de calor tipo helicoidal enchaque-tado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3. Diseno de observadores adaptables 37
3.1 Observabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1.1 Ejemplo: Intercambiador de calor tipo tubos concentricos . . . . . . 40
3.2 Observador de forma adaptable . . . . . . . . . . . . . . . . . . . . . . . . 43
3.3 Observador de gran ganancia . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.4 Observador proporcional-integral . . . . . . . . . . . . . . . . . . . . . . . 48
3.5 Observador de Kalman extendido con estados aumentados . . . . . . . . . 51
3.6 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4. Validacion de los observadores adaptables en procesos de intercambio decalor 55
4.1 Observador de forma adaptable . . . . . . . . . . . . . . . . . . . . . . . . 55
4.1.1 Validacion del observador de forma adaptable . . . . . . . . . . . . 56
4.2 Observador de gran ganancia . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2.1 Validacion del observador de gran ganancia . . . . . . . . . . . . . . 63
4.3 Observador proporcional-integral . . . . . . . . . . . . . . . . . . . . . . . 68
4.3.1 Validacion del observador proporcional-integral . . . . . . . . . . . 69
II
4.4 Observador de Kalman extendido con estados-aumentados . . . . . . . . . 74
4.4.1 Validacion del observador de Kalman extendido con estados aumen-tados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.5 Comparacion de las estimaciones del parametro interno U . . . . . . . . . 79
4.6 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5. Control acotado positivo 83
5.1 Control acotado positivo para el intercambiador de calor tipo tubos concen-tricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.1.1 Control acotado positivo para un intercambiador de calor tipo tubosconcentricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.2 Otras tecnicas de control para el intercambiador de calor tipo tubos concen-tricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.2.1 Controlador proporcional-integral . . . . . . . . . . . . . . . . . . . 92
5.2.2 Controlador linealizante por retroalimentacion de estados . . . . . . 95
5.3 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
6. Conclusiones y trabajos futuros 99
6.1 Conclusiones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.2 Trabajos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Referencias 103
A. Tabla de parametros 107
B. Modelo de la columna de destilacion 109
C. Modelo del intercambiador de calor tipo: tubos concentricos 113
D. Controlador linealizante por retroalimentacion de estados aplicado alintercambiador tipo tubos concentricos 117
E. Implementacion practica de los controladores en el banco de regulacion
III

de temperatura 119
IV

Lista de figuras
1.1 Clasificacion de los intercambiadores de calor . . . . . . . . . . . . . . . . . 2
1.2 Presencia de fouling en las paredes del tubo . . . . . . . . . . . . . . . . . 12
2.1 Condensador helicoidal enchaquetado de la columna de destilacion binariadel CENIDET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2 Diagrama esquematico de la columna de destilacion . . . . . . . . . . . . . 18
2.3 Diagrama esquematico del condensador helicoidal enchaquetado . . . . . . 19
2.4 Curva de enfriamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.5 Temperatura del hervidor y del vapor de entrada al condensador Ti. . . . . 26
2.6 Validacion del modelo del intercambiador de calor. . . . . . . . . . . . . . . 27
2.7 Temperatura del hervidor y del vapor de entrada al condensador. . . . . . 29
2.8 Validacion del modelo del intercambiador de calor. . . . . . . . . . . . . . . 30
2.9 Temperatura del hervidor y del vapor de entrada al condensador. . . . . . 32
2.10 Validacion del modelo del intercambiador de calor. . . . . . . . . . . . . . . 32
4.1 Validacion del observador de forma adaptable . . . . . . . . . . . . . . . . 58
4.2 Estimacion de U con el observador de forma adaptable . . . . . . . . . . . 58
4.3 Error de estimacion del observador de forma adaptable . . . . . . . . . . . 59
4.4 Validacion del observador de forma adaptable . . . . . . . . . . . . . . . . 60
4.5 Estimacion de U con el observador de forma adaptable . . . . . . . . . . . 60
V
4.6 Error de estimacion del observador de forma adaptable . . . . . . . . . . . 61
4.7 Validacion del observador de gran ganancia . . . . . . . . . . . . . . . . . 64
4.8 Estimacion de U con el observador de gran ganancia . . . . . . . . . . . . 65
4.9 Error de estimacion del observador de gran ganancia . . . . . . . . . . . . 65
4.10 Validacion del observador de gran ganancia. . . . . . . . . . . . . . . . . . 66
4.11 Estimacion de U con el observador de gran ganancia. . . . . . . . . . . . . 67
4.12 Error de estimacion del observador de gran ganancia . . . . . . . . . . . . 67
4.13 Validacion del observador proporcional-integral. . . . . . . . . . . . . . . . 70
4.14 Estimacion de U con el observador proporcional-integral. . . . . . . . . . . 71
4.15 Error de estimacion del observador proporcional-integral. . . . . . . . . . . 71
4.16 Validacion del observador proporcional-integral. . . . . . . . . . . . . . . . 72
4.17 Estimacion de U con el observador proporcional-integral. . . . . . . . . . . 73
4.18 Error de estimacion del observador proporcional-integral. . . . . . . . . . . 73
4.19 Validacion del observador de Kalman extendido con estados aumentados. . 76
4.20 Estimacion de U con el observador de Kalman extendido con estados au-mentados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.21 Error de estimacion del observador de Kalman extendido con estados au-mentados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.22 Validacion del observador de Kalman extendido con estados aumentados. . 78
4.23 Estimacion de U con el observador de Kalman extendido con estados au-mentados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.24 Error de estimacion del observador de Kalman extendido con estados au-mentados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.25 Comparaciones de las estimaciones de U de cada observador con el experi-mento 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.26 Comparaciones de las estimaciones de U de cada observador con el experi-mento 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.1 Planta piloto de regulacion de temperatura . . . . . . . . . . . . . . . . . . 87
VI
5.2 Resultados en simulacion del controlador acotado positivo en el intercam-biador de calor en configuracion contraflujo: Tho y Fc . . . . . . . . . . . . 89
5.3 Resultados experimentales del controlador acotado positivo en la planta pi-loto en configuracion contraflujo: Tho y Fc . . . . . . . . . . . . . . . . . . 90
5.4 Resultados experimentales del controlador acotado positivo en la planta pi-loto en configuracion paralelo: Tho y Fc . . . . . . . . . . . . . . . . . . . . 90
5.5 Resultados experimentales del controlador acotado positivo en la plantapiloto en configuracion contraflujo ante un disturbio en el flujo del ladocaliente Fh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.6 Resultados en simulacion del controlador proporcional-integral en el inter-cambiador de calor en configuracion contraflujo: Tho y Fc . . . . . . . . . . 93
5.7 Resultados experimentales del controlador proporcional-integral en la plantapiloto en configuracion contraflujo: Tho y Fc . . . . . . . . . . . . . . . . . 94
5.8 Resultados experimentales del controlador proporcional-integral en la plantapiloto en configuracion contraflujo ante un disturbio en el flujo del ladocaliente Fh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.9 Resultados en simulacion del controlador no lineal [Malleswararao y Chi-dambaram, 1992] en el intercambiador de calor en configuracion contraflujo(Ki = 0): Tho y Fc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.10 Resultados experimentales del controlador no lineal [Malleswararao y Chi-dambaram, 1992] en la planta piloto en configuracion contraflujo: Tho yFc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.11 Resultados experimentales del controlador no lineal [Malleswararao y Chi-dambaram, 1992] en la planta piloto en configuracion contraflujo (Ki = 0):Tho y Fc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
B.1 Diagrama de equilibrio lıquido-vapor . . . . . . . . . . . . . . . . . . . . . 110
C.1 Discretizacion del intercambiador de calor: a)n-celdas y b)una celda . . . . 113
C.2 Intercambiador de calor tipo: tubos concentricos en configuracion contraflujo114
E.1 Interfaz grafica del controlador acotado positivo . . . . . . . . . . . . . . . 120
E.2 Interfaz grafica del controlador proporcional-integral . . . . . . . . . . . . . 121
E.3 Interfaz grafica del controlador no lineal utilizando la linealizacion del modelo122
VII

VIII

Lista de tablas
2.1 Senales de entrada en el experimento 1 . . . . . . . . . . . . . . . . . . . . 25
2.2 Senales de entrada en el experimento 2 . . . . . . . . . . . . . . . . . . . . 28
2.3 Senales de entrada en el experimento 3 . . . . . . . . . . . . . . . . . . . . 31
2.4 Errores medio cuadratico del modelo del condensador helicoidal enchaquetado 35
4.1 Condiciones iniciales del observador . . . . . . . . . . . . . . . . . . . . . . 57
5.1 Propiedades y parametros del intercambiador de calor tipo tubos concentricos 88
A.1 Caracterısticas fısicas de la planta piloto de destilacion binaria . . . . . . . 107
A.2 Propiedades termodinamicas de la mezcla Metanol-Etanol . . . . . . . . . . 107
A.3 Parametros iniciales de las pruebas experimentales . . . . . . . . . . . . . . 108
A.4 Propiedades termodinamica del vapor a condensar (Metanol) . . . . . . . . 108
A.5 Propiedades fısicas y termodinamicas del lıquido de enfriamiento . . . . . . 108
IX

X

Notacion
Letras mayusculas
A Area de transferencia de calor (m2)B Flujo molar del producto de fondo (moles/min)Cp Calor especıfico (Jouls/molC)Cpc Calor especıfico del componente c (Jouls/molC)Cphl Calor especıfico del lıquido condensado (Jouls/(molC))Cphv Calor especıfico del vapor a condensar (Jouls/(molC))Cpj Calor especıfico del lıquido de enfriamiento (Jouls/(kgC))Do Flujo lıquido de salida en el condensador (moles/min)F Flujo molar de la alimentacion (moles/min)Fc Flujo del lıquido del lado frıo (kg/seg)Fh Flujo del lıquido del lado caliente (kg/seg)Fj Flujo del lıquido de enfriamiento (litros/min)Fv Flujo volumetrico de la alimentacion (m3/min)H1 Entalpıa de vapor a la entrada del condensador (Jouls/mol)Lo Flujo lıquido de recirculacion en el condensador (moles/min)Lr Flujo lıquido en la seccion de enriquecimiento (moles/min)Ls Flujo de vapor en la seccion de empobrecimiento (moles/min)M Masa (moles)Mw Peso molecular (gramos)PAb Porcentaje de apertura de la valvula de fondoQ Transferencia de calor (Jouls/min)Qb Transferencia de calor en el hervidor (Watts)Qo Transferencia de calor en el condensador (Jouls/min)R Valvula de recirculacion
XI
T12 Temperatura de la mezcla en el hervidor (C)Tbc1 Temperatura de ebullicion del metanol (C)Tci Temperatura de entrada en el lado frıo (C)Tco Temperatura de salida en el lado frıo (C)TF Temperatura de alimentacion (C)Thd Temperatura de referencia de la salida controlada (C)Thi Temperatura de entrada en el lado caliente (C)Tho Temperatura de salida en el lado caliente (C)Ti Temperatura del vapor a condensar (C)Tji Temperatura de entrada del lıquido de enfriamiento (C)Tjo Temperatura de salida del lıquido de enfriamiento (C)To Temperatura de salida del lıquido condensado (C)U Coeficiente de transferencia de calor (Jouls/(minCm2))Vc Volumen del lıquido de enfriamiento (m3)Vci Volumen de cada estado (ml)VFc Volumen de un componente en la alimentacion (ml)Vr Flujo de vapor en la seccion de enriquecimiento (moles/min)Vs Flujo de vapor en la seccion de empobrecimiento (moles/min)Wtc Porcentaje en peso de un componente en la alimentacion
Letras minusculas
cpc Calor especıfico en el lado frıo (Jouls/(kgC))cph Calor especıfico en el lado caliente (Jouls/(kgC))h Entalpıa lıquida (Jouls/mol)hji Entalpıa lıquida de entrada del lıquido de enfriamiento (Jouls/kg)hjo Entalpıa lıquida de salida del lıquido de enfriamiento (Jouls/kg)ho Entalpıa lıquida de salida del condensador (Jouls/mol)q Calidad de la alimentacionvc Volumen en el lado frıo (m3)vh Volumen en el lado caliente (m3)x Concentracion molar lıquida (moles)y Concentracion molar vapor (moles)
Letras subındices
c Componentef Zona de alimentacionj Zona del lıquido de enfriemientor Zona de enrequecimientos Zona de empobrecimiento
XII

Notacion. XIII
Letras griegas
ρci Densidad del componente i (gramos/cm2)ρc Densidad del fluido frıo (Jouls/(kgC))ρh Densidad del fluido caliente (Jouls/(kgC))ρj Densidad del lıquido de enfriamiento (Jouls/(kgC))βAo Perdidas de energıa al medio ambiente (Jouls/min)∆Hvap
c1 Entalpıa de vaporizacion del Metanol (Jouls/mol)∆Hvap
c2 Entalpıa de vaporizacion del Etanol (Jouls/mol)θ Vector de parametros desconocidos∆T Diferencia de temperaturas
Marcas diacrıticas
∧ Estimacion∗ Deseada
Caracteres especiales
R Campo de los numeros reales
Acronimos
ARIMAX Auto-Regresivo Integrado Promedio Movil con Entrada ExternaARMAX Auto-Regresivo Promedio Movil con Entrada ExternaARX Auto-Regresivo con Entrada ExternaCD Corriente DirectaCENIDET Centro Nacional de Investigacion y Desarrollo TecnologicoEOH EtanolFPC Control Predictivo FuncionalGPC Control Predictivo GeneralizadoLMI Matriz de Desigualdad LinealLMTD Diferencia de Temperatura por Media LogarıtmicaMeOH MetanolMIMO Sistema con Multiples Entradas y Multiples Salidas.PI Proporcional e IntegralSISO Sistema con una Entrada y una Salida.

XIV Notacion.
Capıtulo 1
Introduccion
Los intercambiadores de calor son equipos que propician el flujo de energıa termicaentre dos o mas fluidos a diferentes temperaturas. Los intercambiadores de calor son uti-lizados en una amplia variedad de aplicaciones. Estas incluyen produccion de energıa;procesos quımicos e industria alimenticia; electronica; ingenierıa ambiental; industria ma-nufacturera; y ademas diversas aplicaciones de tecnologıa espacial [Kakac y Liu, 2002].
Estos equipos se pueden clasificar segun los criterios presentados a continuacion[Kakac y Liu, 2002]:
• Recuperacion/Regeneracion.
• Geometrıa de construccion: Tubos, planos y superficies extendidas.
• Direccion de los flujos: Flujo Paralelo, contra flujo y flujo cruzado.
• Mecanismo de transferencia de calor: De una fase y de dos fases.
• Proceso de transferencia: Contacto directo e indirecto.
En la Fig. 1.1 se muestran esquemas representativos de esta clasificacion.
Intercambiadores de calor de Recuperacion/Regeneracion
Recuperadores:
En los intercambiadores de calor recuperadores, la transferencia de calor se realizaentre dos rangos de flujos que no se mezclan o que no tienen contacto entre sı. Los rangos
1

2 CAPITULO 1. INTRODUCCION
Figura 1.1: Clasificacion de los intercambiadores de calor

3
de fluidos estan separadas por una pared hecha de algun tipo de metal o aleacion quefacilita la transferencia de calor.
Regeneradores:
Los regeneradores son intercambiadores de calor donde se aplica un tipo de flujoperiodico. Es decir, el mismo espacio es ocupado alternativamente por los gases calientesy frıos entre los cuales se intercambia el calor.
El fluido caliente fluye a traves del mismo espacio seguido de uno frıo en forma al-ternada, con tan poca mezcla fısica como sea posible entre las dos fluidos. La superficieque alternativamente recibe y luego libera la energıa termica, es muy importante en estedispositivo.
En general los regeneradores se emplean para recalentar el aire de las plantas defuerza de vapor, de los hornos de fundicion o de los altos hornos y ademas en muchas otrasaplicaciones que incluyen la produccion de oxıgeno y la separacion de gases a muy bajastemperaturas.
Clasificacion de los intercambiadores de calor por su geometrıa
Hay distintos tipos de geometrıas de construccion en los intercambiadores de calor,los principales son los ya mencionados, pero a su vez cada uno de esos tipos de geometrıastiene distintas clasificaciones.
I. Geometrıa tubular:
Tubos Concentricos consiste en un tubo colocado dentro de otro concentrico demayor diametro con una union adecuada para dirigir el flujo de una seccion ala siguiente. Dicho intercambiador de calor pueden utilizarse en configuracioncontraflujo y paralelo en direccion de los fluidos, para satisfacer la caıda depresion y la diferencia de temperaturas.
Tubo y Coraza consiste en una serie de tubos cilındricos de gran tamano montadosdentro de una coraza, los tubos se colocan de forma paralela a la coraza. Ellosson ampliamente utilizados como enfriadores de aceite, plantas de energıa y enla industria quımica.
Tubo espiral consiste de bobinas enrolladas en espiral colocadas en una coraza.Son disenadas como condensadores y evaporadores coaxiales que se utilizan ensistemas de refrigeracion.
II. Geometrıa plana:

4 CAPITULO 1. INTRODUCCION
Planos juntados consiste en una serie de placas delgadas con corrugaciones o unasuperficie ondulada que separa los fluidos.
Planos espiral esta formado por dos largas rodaduras, placas paralelas dentro deuna espiral usando un cilindro y soldadas en los bordes de las placas adyacentesa los canales formados.
Laminado consiste en un conjunto de laminas paralelas, soldadas. Dichas laminasse encuentran en canales colocadas longitudinalmente en una coraza.
III. Otras geometrıas:
Aletas Planas los flujos de vapor estan separados por placas planas, entre las cualesexisten aletas corrugadas, se pueden organizar en una variedad de configura-ciones con respecto a los flujos de los vapores. Son ampliamente utilizadas encriogenicos, recuperacion de energıa, industria de procesos, y en la refrigeraciony sistemas de aire acondicionado.
Aletas Tubulares consisten en un conjunto de tubos con aletas fijas en el exterior.Las aletas en la parte exterior de los tubos pueden ser normalmente tubos indi-viduales y tambien pueden ser transversales, helicoidales o longitudinales. Lasaletas longitudinales se utilizan comunmente en intercambiadores de calor tipotubos concentricos y tubo y coraza sin deflectores. Se utilizan comunmente enlos sistemas de calefaccion, ventilacion, refrigeracion y sistemas de aire acondi-cionado.
Clasificacion de los intercambiadores de calor de acuerdo con la direccionde los flujos
Los intercambiadores se clasifican de acuerdo con el arreglo del flujo. En el arreglode flujos paralelos, los fluidos caliente y frıo entran por el mismo extremo, fluyen en lamisma direccion y salen por el mismo extremo. En el arreglo de contraflujos, los fluidosentran y salen por extremos opuestos, fluyen en direccion opuesta. Por ultimo el arreglode flujos cruzados, un fluido fluye en direccion perpendicular al otro.
Clasificacion de los intercambiadores de calor de acuerdo al mecanismode transferencia
Los intercambiadores de calor tambien pueden clasificarse acorde a los mecanismosde transferencia de calor como:
Convencion en ambos lados de una fase: Cuando ningun fluido cambia de fase.
Convencion en un lado de una fase, convencion del otro lado de dos fases: Cuan-do un fluido no cambia de fase y el otro si lo hace.

1.1. PLANTEAMIENTO DEL PROBLEMA: 5
Convencion en ambos lados de dos fases: Cuando los dos fluidos cambian de fase.
Clasificacion de los intercambiadores de calor de acuerdo al proceso detransferencia
Acorde al proceso de transferencia, los intercambiadores de calor se pueden clasificaren intercambiadores de calor de contacto directo e intercambiadores de calor de contactoindirecto.
En los intercambiadores de calor de contacto directo, la transferencia de calor entreun fluido caliente y uno frıo es a traves de contacto directo entre los fluidos. No hay paredentre los fluidos frıo y caliente, y la transferencia de calor ocurre a traves de la interfazentre los dos fluidos.
En los intercambiadores de calor de contacto indirecto, la energıa de calor es trans-ferida entre un fluido caliente y otro frıo, a traves de una superficie de transferencia decalor, es decir, una pared separa a los dos fluidos.
Los intercambiadores de calor que se abordan en esta tesis son de dos tipos: tubosconcentricos y helicoidal enchaquetado. El primero cuenta con una geometrıa tubular,no existe cambio de fase en sus fluidos y es de tipo recuperador. El segundo tiene unageometrıa tubular (una espiral y una chaqueta), existe cambio de fase en uno de sus fluidos,es decir, se condensa, por lo que este intercambiador de calor es un condensador.
1.1 Planteamiento del problema:
En este trabajo de tesis, se pretende abordar dos tipos de intercambiadores de calor:intercambiador de calor tipo helicoidal enchaquetado e intercambiador de calor tipo tubosconcentricos, ya que en el CENIDET se cuenta con estos dos tipos de intercambiadoresde calor. Por otra parte, no se cuenta aun con un modelo matematico que se haya desa-rrollado en CENIDET para el intercambiador de calor tipo helicoidal enchaquetado.
Uno de los problemas mas frecuentes en los intercambiadores de calor es la sedimen-tacion de residuos en los tubos o en las paredes del mismo, lo que ocasiona una variacionen el coeficiente de transferencia de calor. Este problema es conocido como fouling.
Existen trabajos reportados recientemente en la literatura para detectar el fouling.En todos los casos, se reconoce que el fouling es inevitable, sin embargo, con un algoritmoadecuado para su deteccion, se podran evitar danos irreparables en el equipo, como corro-
6 CAPITULO 1. INTRODUCCION
sion o erosion, es por ello que en este tema de tesis se pretenden proporcionar algoritmoscapaces de estimar la degradacion del coeficiente de transferencia de calor.
Por otra parte, en lo que se refiere al control de los intercambiadores de calor, enla literatura se reportan varias tecnicas para estos procesos. Se han propuesto algoritmoslinealizantes por retroalimentacion de estados parcial y totalmente, basados en un modelocompartimental simplificado (una celda, vease Fig. C.1.b) [Alsop y Edgar, 1989; Malles-wararao y Chidambaram, 1992], sin embargo estos algoritmos requieren que se conozcanlos parametros de la planta. Hay otros algoritmos que requieren que se lleve a cabo unproceso de identificacion de la planta, sin embargo, con dichas tecnicas no se capturatoda la dinamica del proceso, por ejemplo [Lim y Ling, 1989]. Tambien existen contro-ladores convencionales (controlador PI), los cuales no consideran restricciones de la senalde control, esto produce en ocasiones que esta se sature y con ello no se obtengan un buendesempeno de dichos controladores. Por todo lo mencionado anteriormente, se consideranecesario desarrollar un control facil de implementar que considere las limitaciones de lasenal de control, sin necesidad de conocer los parametros de la planta.
1.2 Hipotesis
Las hipotesis planteadas para este trabajo de investigacion son las siguientes:
• A traves de observadores de estado se estiman variables medibles y no mediblesdel intercambiador de calor tipo helicoidal enchaquetado, ası como un parametrointerno, el cual es el coeficiente de transferencia de calor, que varıa con la presenciadel fouling.
• Por medio de un controlador no lineal acotado positivo se controla la temperatura deun fluido del intercambiador de calor tipo tubos concentricos considerando solamenterestricciones en la entrada de control.
1.3 Objetivo general
1. Obtencion del modelo matematico basado en leyes fısicas del intercambiador de calortipo helicoidal enchaquetado, el cual permitira desarrollar algoritmos de estimacionde la variacion del coeficiente de transferencia de calor debido al fouling, que seraconsiderada como una falla.
2. Implementacion de un controlador acotado positivo en el intercambiador de calortipo: tubos concentricos.

1.4. ALCANCES Y LIMITACIONES 7
1.3.1 Objetivos especıficos
• Desarrollar y evaluar experimentalmente el modelo matematico del intercambiadorde calor tipo helicoidal enchaquetado que tiene la columna de destilacion del CENIDET.
• Analizar y disenar observadores de estado aplicados al intercambiador de calor tipohelicoidal enchaquetado.
• Desarrollar e implementar un controlador no lineal acotado positivo para el inter-cambiador de calor tipo tubos concentricos.
• Comparar el controlador no lineal acotado positivo con otras tecnicas de controldesarrolladas para los intercambiadores de calor.
1.4 Alcances y limitaciones
Alcances:
En este trabajo se desarrolla un modelo matematico simplificado del intercambiadorde calor tipo helicoidal enchaquetado que permite desarrollar observadores no lineales queestiman tanto las variables medibles y no medibles, ası como un parametro interno. Talparametro sera el coeficiente de transferencia de calor, como se sabe se degrada en la pres-encia del fouling.
En este trabajo se desarrolla e implementa un controlador no lineal acotado positivoque considera restricciones en la entrada de control del intercambiador de calor tipo tubosconcentricos en configuraciones contraflujo y paralelo.
Limitaciones:
• El modelado matematico del intercambiador de calor tipo helicoidal enchaquetadosolo considera el balance de energıa, debido a que es suficiente este balance paramonitorear la desviacion del coeficiente de transferencia de calor.
• El intercambiador de calor tipo helicoidal enchaquetado no esta totalmente instru-mentado, ya que no cuenta con un transmisor de temperatura en la salida del lıquidocondensado.
• Solo se analizo la estimacion del coeficiente de transferencia de calor, el cual da lapauta para un analisis posterior de la presencia del fouling.
• La comparacion de las tecnicas de control solo se realizo en configuracion de con-traflujo en el intercambiador de calor tipo tubos concentricos.

8 CAPITULO 1. INTRODUCCION
1.5 Motivacion y justificacion
Los intercambiadores de calor son equipos utilizados con gran demanda en los proce-sos industriales. Tener totalmente instrumentados dichos equipos es muy costoso, lo queocasiona tener una instrumentacion incompleta, y por ende no tener disponibles todas lasvariables del proceso. Esto trae como consecuencia no presenciar algun tipo de falla comolo es el fouling, la cual es inevitable en este tipo de procesos.
Es por ello que se buscan ciertas alternativas para poder detectar la desviacion delcoeficiente de transferencia de calor, la cual puede deberse a la presencia del fouling, sinla necesidad de tener medibles todas las variables del proceso por sensores fısicos.
Una de las alternativas es desarrollar algoritmos que permitan estimar tanto varia-bles del proceso que no esten instrumentadas, como parametros internos. Cabe aclararque con esto se tiene un notable ahorro economico, por un lado al utilizar observadores deestado, es decir, sensores virtuales en vez de sensores fısicos y por otro lado el ahorro deenergıa que se tiene al detectar a tiempo la desviacion del coeficiente de transferencia decalor.
Existen varios controladores propuestos en la literatura para este tipo de procesos,desde los controladores linealizantes por retroalimentacion de estados [Alsop y Edgar,1989; Malleswararao y Chidambaram, 1992], los cuales son difıciles de implementar (de-bido a que requiere de varios calculos para obtener la senal de control) y no arrojan muybuenos resultados en la practica (ya que es lento y ruidoso), hasta los controladores queutilizan una identificacion de la planta los cuales descuidan las caracterısticas fısicas de laestabilidad del sistema [Lim y Ling, 1989].
Con lo anterior es necesario proponer un controlador que sea facil de implemen-tar, que contemple la dinamica del sistema (sin necesidad de conocer sus parametros) yque considere restricciones en la entrada de control. Dicho controlador se implemento ydesarrollo en esta tema de tesis.
1.6 Aportaciones
Las aportaciones de este trabajo de tesis son las siguientes:
I En este trabajo de tesis se aporto un modelo matematico del intercambiador de calortipo helicoidal enchaquetado de la columna de destilacion binaria que se encuentraen el CENIDET necesario para seguir con el estudio de la dinamica de la columnade destilacion, ası como algoritmos de estimacion de estados y parametros de dicho

1.7. ESTADO DEL ARTE 9
intercambiador de calor.
II En el trabajo de tesis se abordan cuatro observadores de estados no lineales loscuales son: observador de forma adaptable, de gran ganancia, Kalman extendido yproporcional-integral para sistemas no lineales. La aportacion de este trabajo esel estudio y desarrollo de los dos ultimos observadores mencionados. En el casodel observador proporcional-integral para sistemas no lineales existen escasos traba-jos reportados en la literatura, por lo que en este trabajo se considera como unaaportacion original. En el caso de los observadores de Kalman extendido, existennumerosos trabajos reportados en la literatura, sin embargo, la gran mayorıa deestos, solo estiman variables de estado siendo muy pocos los trabajos donde se real-iza la estimacion de parametros. Por otra parte, los algoritmos utilizados son muycomplejos (ya que necesitan que se resuelvan una serie de ecuaciones diferenciales),por lo que en este trabajo se propone un algoritmo simple para la estimacion deparametros.
III Se aporta tambien un controlador para el intercambiador de calor de tipo tubosconcentricos, el cual se basa en un algoritmo simple que considera los lımites fısicosde la senal de control de la planta y una facil sintonizacion, estas cualidades per-miten que dicho controlador se pueda implementar muy facilmente y con excelentesresultados.
1.7 Estado del arte
1.7.1 Observadores de estados adaptables
La teorıa sobre observadores de estados en sistemas lineales es muy bien cono-cida y se empezo a estudiar desde los anos 70′s. Sin embargo, el diseno de observadoresasintoticamente estables sigue siendo una tarea ardua en el caso no lineal.
En los ultimos anos se han propuesto diversos disenos de observadores de estado parasistemas no lineales. Por ejemplo [Walcott y Zak, 1986, 1987], propusieron un nuevo tipode observadores para sistemas no lineales sujetos a lımites o incertidumbres. Este tipo deobservadores no requiere un conocimiento exacto del sistema no lineal. [Bastin y Gevers,1988] tambien describen un observador de estado adaptable, para el caso de sistemas nolineales SISO, capaz de estimar estados y adaptacion de parametros. [Marino, 1980] de-sarrollo la misma idea y propuso un observador restringido mas sencillo, sin embargo, esteestudio era para una clase de sistemas con parametros constantes desconocidos. Como re-sultado principal, la construccion de un observador puede desarrollarse encontrando tantoun adecuado espacio de estado, como una adecuada transformacion de coordenadas delas salidas del sistema no lineal, quedando expresado en forma observable. De la cual se

10 CAPITULO 1. INTRODUCCION
puede derivar un observador con dinamica lineal. [Krener e Isidori, 1983; Xia y Gao, 1988]propusieron algebra de Lie y condiciones de rango para la observabilidad de procesos nolineales.
Algunos trabajos acerca de observadores de estado adaptables se basan en cambiosde transformacion de las variables del sistema original a traves alguna forma canonica,en la cual la presencia de parametros desconocidos se simplifica para la extension de al-gunos. Recientemente, un observador simple con ganancia constante ha sido propuesto en[Besancon, 2000]. Estos enfoques involucran dos parametros de sintonizacion independi-entemente del numero de ecuaciones diferenciales del modelo.
Exitosamente han sido aplicados observadores de estado adaptables para una ampliavariedad de sistemas dinamicos, por ejemplo, para la estimacion de: la masa suspendidaen automoviles [Rajamani y Hedrick, 1995], la presion parcial de hidrogeno en el anodode las celdas de combustible [Arcak y col., 2004], la reaccion cinetica en reactores depolimerizacion [Astorga y col., 2001] o bioreactores [Perrier y col., 2000], la resistencia delrotor y el torque de la carga en motores de induccion [Mangsuli y Rao, 2006], la velocidaddel rotor en un motor de CD [Yachiangkam y col., 2004] y la densidad del trafico [Alvarezy col., 2004], etc.
1.7.2 Controladores aplicados a intercambiadores de calor
Respecto al control para los intercambiadores de calor en la literatura se han usadovarias tecnicas. Por ejemplo, controladores linealizantes por retroalimentacion de estadosparcial y totalmente [Alsop y Edgar, 1989; Malleswararao y Chidambaram, 1992] basadosen un modelo compartimental simplificado, dichos algoritmos son difıciles de implementary no consideran las variaciones de los parametros del sistema, ni las restricciones en lasentradas de control. Otros trabajos proponen esquemas de Control Predictivo Generali-zado (GPC), los cuales hacen uso de modelos ARX, ARMAX o ARIMAX [Lim y Ling,1989]. Trabajos similares se detallan en [Jalili y Araabi, 2003], en el cual se presenta uncontrol predictivo neuronal. En esa misma lınea, tambien se han desarrollado multiplestrabajos sobre Control Predictivo Funcional (FPC) basados en modelos difusos [Skrjanc yMatko, 2000]. Las desventajas de estos ultimos, es que utilizan tecnicas de identificacionpara aproximar el modelo, con lo cual no se captura totalmente la dinamica del proceso.Otra tecnica de control propuesta aplicada a los intercambiadores de calor se presenta en[Hangos y col., 2004], donde se desarrolla un Control Hamiltoniano.
1.8. DEGRADACION DEL FUNCIONAMIENTO EN LOS INTERCAMBIADORES DE CALOR 11
1.8 Degradacion del funcionamiento en los intercam-
biadores de calor
Un problema importante en los intercambiadores recuperadores de calor es el fou-ling. El fouling puede ser definido como la acumulacion de substancias indeseables en unasuperficie. En general, se refiere a la acumulacion de impurezas en la parte interior de lasuperficie.
Un intercambiador de calor debe efectuar un cambio deseado en las condicionestermicas del proceso, debido a los cambios de rango de flujo, esto debera continuarhaciendose durante un perıodo de tiempo especıfico. En la operacion, la disminuciondel area de transferencia de calor, resulta un incremento en la resistencia termica y amenudo un incremento en la caıda de presion, ası como la potencia de bombeo. Ambosefectos repercuten en la degradacion del funcionamiento del intercambiador de calor. Elintercambiador de calor se puede deteriorar al grado de ser retirado de servicio, ya seapara su sustitucion o mantenimiento.
El fouling puede influir significativamente en el diseno general del intercambiador decalor y puede determinar la cantidad de material empleado para la construccion, ası comoel tiempo de funcionamiento sin necesidad de limpiarlo. Consecuentemente, el foulingcausa una perdida economica enorme, como es un impacto directo en el costo inicial, costode operacion y su funcionamiento. Una revision detallada y actualizada sobre el disenode modelos de intercambiadores de calor considerando la presencia del fouling se da por[Kakac y Liu, 2002].
El fouling reduce la eficiencia de un intercambiador de calor mediante la reduccionde la transferencia de calor, ademas tambien afecta a la caıda de presion. Esta reduccionde la transferencia de calor recae principalmente en una desviacion en el coeficiente detransferencia de calor. La presencia del fouling en un intercambiador de calor tipo tubularse muestra en la Fig. 1.2.
1.9 Metodologıa
La metodologıa empleada para desarrollar el tema de tesis es la siguiente:
1. Estudio de los procesos de destilacion y condensacion. Ya que estos estudios sonnecesarios para desarrollar el modelo matematico, ademas facilitan la compresiondel funcionamiento de la columna de destilacion.
2. Desarrollo del modelo matematico del intercambiador de calor de tipo helicoidal

12 CAPITULO 1. INTRODUCCION
Figura 1.2: Presencia de fouling en las paredes del tubo
enchaquetado. Debido a que es necesario para desarrollar los observadores de estadopropuestos en esta tesis.
3. Validacion experimental del modelo. Esto se llevo a cabo para poder comprobar queel modelo matematico tuviese una aproximacion cercana a la planta.
4. Estudio y diseno de observadores de estado aplicado al intercambiador de calor tipohelicoidal enchaquetado. Se desarrollaron cuatro observadores de estados: de formaadaptable, gran ganancia, proporcional-integral y Kalman extendido con estadosaumentados.
5. Validacion de los observadores de estado. Dicha validacion se llevo a cabo con datosexperimentales de la planta piloto.
6. Estudio del modelo matematico del intercambiador de calor tipo tubos concentricos.Ya que el estudio de este modelo era necesario para el desarrollo del controladorpropuesto en la tesis.
7. Desarrollo e implementacion del controlador no lineal acotado positivo aplicado alintercambiador de calor tipo tubos concentricos en configuraciones contraflujo y pa-ralelo. Se realizaron pruebas del controlador en simulacion y experimentales.
8. Implementacion de otras tecnicas de control aplicadas al intercambiador de calortipo tubos concentricos. Se realizaron pruebas con un controlador no lineal conretroalimentacion de estados (dicho controlador necesita el modelo del sistema) yun controlador proporcional-integral, para poder comparar el funcionamiento delcontrolador propuesto.
9. Analisis de resultados. Se obtuvieron las respuestas de la columna de destilacionque se utilizaron para validar el modelo propuesto y los observadores de estado. Asıcomo tambien las respuestas del controlador con el intercambiador de calor tubosconcentricos.

1.10. ORGANIZACION DEL DOCUMENTO 13
10. Conclusiones y escritura de la memoria de tesis.
1.10 Organizacion del documento
El presente documento consta de 6 capıtulos, los cuales se describen brevemente acontinuacion:
En el Capıtulo 2 se presentan los conceptos basicos del proceso de condensacion,ası como el desarrollo del modelado matematico del intercambiador de calor tipo helicoidalenchaquetado.
En el Capıtulo 3 se presentan cuatro metodos de diseno de observadores de estadobajo un enfoque de observadores de estado adaptables: de forma adaptable, de gran ganan-cia, Kalman extendido con estados aumentados y proporcional-integral que son propuestoscomo alternativa para resolver el problema de la variacion del coeficiente de transferenciade calor.
En el Capıtulo 4 se muestra la aplicacion de los observadores de estado al inter-cambiador de calor tipo helicoidal enchaquetado. Tambien se muestran los resultados deestos algoritmos.
En el Capıtulo 5 se presenta el diseno e implementacion del controlador no linealaplicado al intercambiador de calor tipo tubos concentricos en configuraciones contraflujoy paralelo. En el mismo se presenta la comparacion de este controlador con otras tecnicasde control.
En el Capıtulo 6 se presentan las conclusiones y los trabajos futuros.

14 CAPITULO 1. INTRODUCCION

Capıtulo 2
Modelado de intercambiadores de calor tipo
helicoidal enchaquetado
El objetivo de este capıtulo es presentar el diseno y desarrollo del modelo matematicodel intercambiador de calor tipo helicoidal enchaquetado, el cual funciona como un con-densador. Tambien se presentan los resultados de los experimentos que se llevaron a cabopara validar dicho modelo.
En la Seccion 2.1 se presenta una descripcion del intercambiador de calor tipo heli-coidal enchaquetado, el cual se encuentra fısicamente ubicado en la columna de destilacionbinaria del CENIDET. En la Seccion 2.2 se presenta el desarrollo del modelado matematicode este intercambiador basado en leyes fısicas, el cual se obtuvo del balance de energıa.En la Seccion 2.3 se presentan los resultados obtenidos en pruebas experimentales en lacolumna de destilacion binaria con el objeto de validar el modelo del intercambiador decalor propuesto. Por ultimo en la Seccion 2.4 se mencionan las conclusiones obtenidas eneste capıtulo.
2.1 Condensador de la columna de destilacion
La columna de destilacion binaria con la que cuenta el CENIDET, consiste en 10platos, un condensador y un hervidor. Se etiqueta al condensador con el numero uno, alhervidor con el numero doce, y los platos intermedios son enumerados ascendentementedel condensador al hervidor, teniendo en cuenta que el plato de alimentacion es el numero7. Con estos componentes la columna se puede seccionar en zonas las cuales son: zona deenriquecimiento, empobrecimiento, alimentacion, hervidor y condensador [Torres, 2005;
15

16 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
Valencia, 2006].
Uno de los intercambiadores de calor que se estudia en este tema de tesis es el inter-cambiador de calor que se encuentra en la cima de la columna de destilacion. La funcionde tal intercambiador de calor es de remover el calor del producto destilado de la sustanciamas ligera de la mezcla, es decir, condensa el vapor destilado de dicha sustancia para queel lıquido obtenido pueda ser recolectado como producto destilado en fase lıquida. Por loque a este intercambiador de calor que tiene como funcion condensar un vapor se le conocecomo condensador [Kakac y Liu, 2002].
Este tipo de condensador, es llamado condensador helicoidal enchaquetado(vease laFig. 2.1), se le conoce ası, debido a que tiene un tubo helicoidal por donde fluye el lıquidode enfriamiento, este tipo de geometrıa es muy usada para los condensadores y evapo-radores (para cambios de fase). Tal geometrıa permite tener un elevado coeficiente detransferencia de calor. Por otra parte, este condensador tiene una chaqueta. Siendo estetipo de condensador poco comun.
Cabe mencionar que este condensador es de tipo total, es decir, que el flujo devapor proveniente de los platos de la columna de destilacion que entra al condensadorhelicoidal enchaquetado es condensado, independientemente del flujo de vapor que entreal condensador.
Figura 2.1: Condensador helicoidal enchaquetado de la columna de destilacion binaria del CENIDET

2.2. MODELO DEL CONDENSADOR DE LA COLUMNA DE DESTILACION BINARIA 17
2.2 Modelo del condensador de la columna de desti-
lacion binaria
Para desarrollar el modelo del condensador primero hay que tener en cuenta el modelode la columna de destilacion binaria. Por ello se presenta en la siguiente subseccion unmodelo simplificado de la columna de destilacion.
2.2.1 Modelo de la columna de destilacion
El modelo de la columna consiste en balances de materia, de componente y de ener-gıa. Ademas de estas ecuaciones diferenciales se tienen ecuaciones algebraicas las cualesson necesarias para definir los parametros de alimentacion, flujos, masas molares y el equi-librio entre las fases lıquida y gaseosa de la mezcla (vease en el Anexo B).
Tomando en cuenta las suposiciones presentadas en el Anexo B, que permite obtenerun modelo simple de una columna de destilacion binaria, se considera el siguiente mode-lo matematico de la columna descrito por el balance de los componentes [Torres, 2005;Valencia, 2006]:
M1dxD
dt= Vr(y2 − xD)
Midxi
dt= Vr(yi+1 − yi) + Lr(xi−1 − xi) i = 2, ..., f − 1
Mfdxf
dt= ycf+1Vs − xfLs − yfVr + xf−1Lr + FxF
Midxi
dt= Vs(yi+1 − yi) + Ls(xi−1 − xi) i = f + 1, ..., n− 1
Mndxn
dt= Ls (xn−1 − xcn) + Vs (ycn − xcn)
(2.1)
En el caso del condensador helicoidal enchaquetado es necesario conocer el flujo de vaporque se genera en la zona de enriquecimiento de la columna de destilacion binaria Vr, debidoa que este es el flujo molar a condensar en el condensador. Tambien es necesario conocer latemperatura a la cual se encuentra este flujo Ti, ya que esta es la temperatura de entradadel condensador.

18 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
2.2.2 Modelo del condensador tipo helicoidal enchaque-
tado
En el diagrama de la columna de destilacion binaria mostrado en la Fig. 2.2 se puedeapreciar los flujos de entrada Fv, salida Do y molares Ls, Lr, Vs y Vr de la columna dedestilacion ademas de las transferencias de calor que se tienen en el condensador Qo yhervidor Qb. Se observa que el flujo molar que entra al condensador es el vapor de la mez-cla binaria en la zona de enriquecimiento Vr, el cual se condensa para obtener la mezcladestilada.
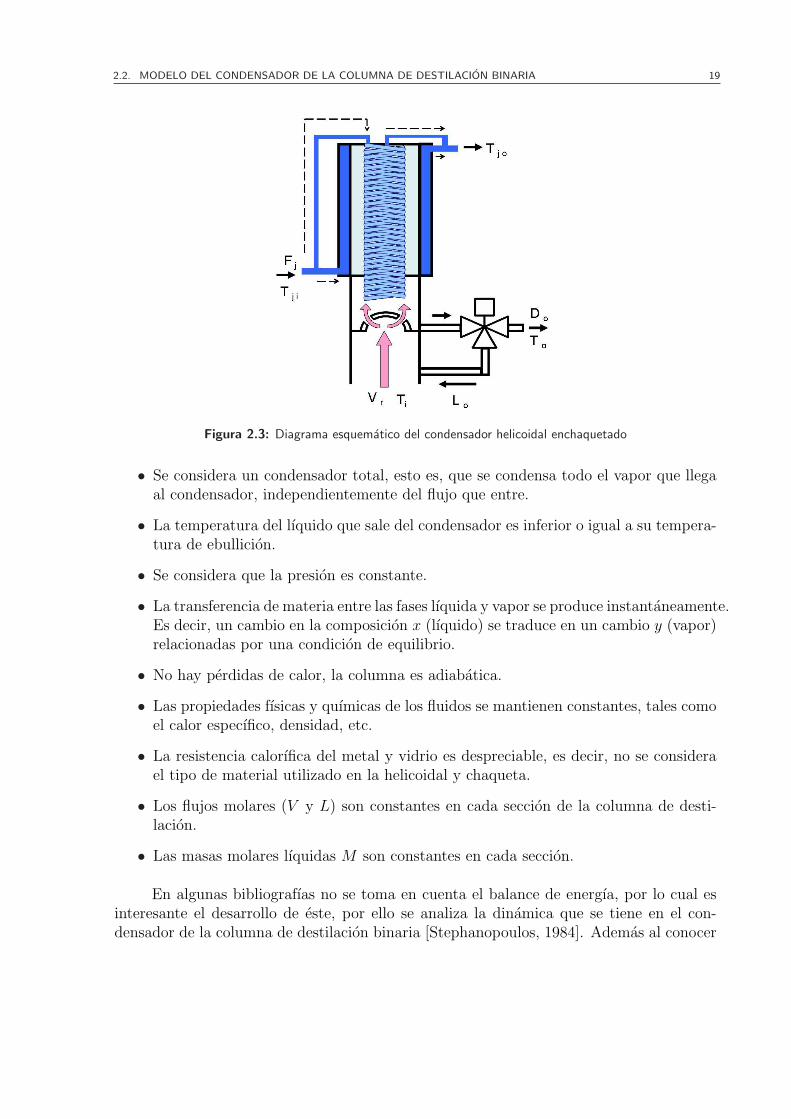
En la Fig. 2.3 se muestra el diagrama esquematico del condensador. En ella sepueden apreciar las variables de entrada en el lado del flujo a condensar las cuales son Ti
y Vr, que son la temperatura y flujo de vapor de la mezcla a condensar respectivamente,ademas se observan las entradas en el lado del flujo de enfriamiento que son la temperaturay flujo del lıquido de enfriamiento Tji y Fj respectivamente. Las salidas del condensadorson las temperaturas a la que se encuentra el producto destilado y el agua de enfriamientoTo y Tjo. Ademas se aprecia el flujo del lıquido destilado Do, ası como el flujo que seretorna a la columna Lo.
Figura 2.2: Diagrama esquematico de la columna de destilacion
Para desarrollar el modelo del condensador se toman en cuenta ciertas suposiciones,las cuales son:
2.2. MODELO DEL CONDENSADOR DE LA COLUMNA DE DESTILACION BINARIA 19
Figura 2.3: Diagrama esquematico del condensador helicoidal enchaquetado
• Se considera un condensador total, esto es, que se condensa todo el vapor que llegaal condensador, independientemente del flujo que entre.
• La temperatura del lıquido que sale del condensador es inferior o igual a su tempera-tura de ebullicion.
• Se considera que la presion es constante.
• La transferencia de materia entre las fases lıquida y vapor se produce instantaneamente.Es decir, un cambio en la composicion x (lıquido) se traduce en un cambio y (vapor)relacionadas por una condicion de equilibrio.
• No hay perdidas de calor, la columna es adiabatica.
• Las propiedades fısicas y quımicas de los fluidos se mantienen constantes, tales comoel calor especıfico, densidad, etc.
• La resistencia calorıfica del metal y vidrio es despreciable, es decir, no se considerael tipo de material utilizado en la helicoidal y chaqueta.
• Los flujos molares (V y L) son constantes en cada seccion de la columna de desti-lacion.
• Las masas molares lıquidas M son constantes en cada seccion.
En algunas bibliografıas no se toma en cuenta el balance de energıa, por lo cual esinteresante el desarrollo de este, por ello se analiza la dinamica que se tiene en el con-densador de la columna de destilacion binaria [Stephanopoulos, 1984]. Ademas al conocer

20 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
las temperaturas de salida del intercambiador de calor se podrıa conocer la presenciadel fouling que podrıa danar o disminuir la eficiencia del equipo con el paso del tiempo.El fouling hace variar la transferencia de energıa, lo cual se refleja en el balance de energıa.
El balance de energıa del lado del flujo de vapor a condensar se da por:
dMho
dt= VrH1 − L0ho −D0ho − βAo −Qo (2.2)
El balance de energıa del lado del flujo de enfriamiento se da por [Wayne, 2002]:
ρjVcdhjo
dt= Fjρj (hji − hjo) + Qo (2.3)
Estos balances estan en funcion de las energıas que entran y salen del condensadortanto del lado del flujo a condensar, el cual es el flujo de vapor del ultimo plato de lacolumna de destilacion, como del lado del flujo de enfriamiento. Ademas se tiene encuenta la transferencia de energıa Qo de un flujo a otro, en el lado del flujo a condensarse resta debido a que se pierde calor y en el lado del flujo de enfriamiento se suma ya quese gana calor.
Debido a que se consideran constantes las masas molares M y ademas que no hayperdidas de energıa (βAo = 0), se simplifica la ecuacion del balance de energıa del flujo acondensar dado en la Ec. (2.2), quedando:
Mdho
dt= Vr (H1 − h0)−Qo (2.4)
El calculo de una entalpıa esta en funcion de la composicion, temperatura y presion.Como se considera la presion constante se puede hacer una simplificacion. La entalpıapara un lıquido en forma simplificada esta dado por [Luyben, 1996]:
h = CpT (2.5)
Por lo que las entalpıas del lado del flujo de enfriamiento de entrada hji y salida hjo,estan dadas por [Luyben, 1996]:
hji = CpjTji (2.6)
hjo = CpjTjo (2.7)

2.2. MODELO DEL CONDENSADOR DE LA COLUMNA DE DESTILACION BINARIA 21
La entalpıa molar en la fase de vapor H1 es una funcion de la composicion y latemperatura. Dicha entalpıa es del componente mas ligero de la mezcla.
La entalpıa molar en la fase del vapor de entrada al condensador queda:
H1 = ∆Hvapc1 + Cphv(Ti − Tbc1) (2.8)
En el caso de la entalpıa de salida del lıquido condensado se puede obtener mediantela siguiente expresion [Schmitz, 1995]:
ho = Cph` (To − Tbc1) (2.9)
Esto se debe a que se considera un condensador total, esto da a entender que el vaporque llega es totalmente transformado a lıquido, independientemente del flujo de vapor quellegue. Tomando en cuenta tambien la suposicion que el lıquido condensado sale a unatemperatura igual o menor a la temperatura de ebullicion. Esto se debe a que el lıquidocondensado escurre en las paredes de la chaqueta y helicoidal, cediendo una parte de sucalor antes de que salga definitivamente del condensador.
Sustituyendo las Ecs. (2.6 - 2.9) en las ecuaciones de balance de energıa tanto comoen el lado del vapor a condensar (Ec. (2.2)) y del lado del lıquido de enfriamiento (Ec.(2.3)), ademas considerando que no existe algun tipo de perdida de energıa βAo = 0, queda:
dTo(t)
dt= [∆Hvap
c1 + Cphv (Ti(t)− Tbc1)− Cph` (To(t)− Tbc1)]Vr(t)
MCph`
− Qo
MCph`
(2.10)
dTjo(t)
dt=
1
Vc
[Fj(t) (Tji(t)− Tjo(t)) +
Qo
Cpjρj
](2.11)
Qo es la cantidad de calor transferido por unidad de tiempo. Como se observa enlas Ecs. (2.10) y (2.11), en el lado del lıquido condensado se resta para ceder calor y enel lado del lıquido de enfriamiento se suma para anadir calor. Para calcular esta cantidadse necesita interpretar la siguiente grafica:

22 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
Figura 2.4: Curva de enfriamiento
En la Fig. 2.4 se aprecia que para condensar la mezcla que esta en fase de vapora una temperatura Ti, se empieza a extraer calor progresivamente hasta que la mezclacambie a fase lıquida a una temperatura To. Se observa que existen tres transferenciasde calor Q, esto significa que el intercambiador de calor se puede divider en la seccion 1,seccion 2 y seccion 3, esto es Q1, Q2 y Q3 respectivamente. Por lo que la transferencia decalor Qo = Q1 + Q2 + Q3.
En la seccion 1 (Q1) se tiene una transferencia de calor expresada en la Ec. (2.12),donde cabe mencionar que en esta seccion el coeficiente de transferencia es muy pequenoen la columna de destilacion binaria, por lo que en esta seccion no hay transferencia decalor muy significativa.
Q1 = U1A (To(t)− Tjo(t)) (2.12)
En la seccion 2 existe una transferencia de calor expresado por la Ec. (2.13), enesta seccion es donde se pasa de vapor a lıquido y es donde ocurre la mayor parte de latransferencia de calor en todo el intercambiador de calor de la columna de destilacion.
Q2 = Vr∆Hvapc1 (2.13)
donde ∆Hvapc1 es el calor latente de vaporizacion. El calor latente es la energıa absorbida
por las sustancias al cambiar de estado; si el cambio se produce de un estado lıquido agaseoso se le llama calor latente de vaporizacion. Al cambiar una substancia de estadogaseoso al estado lıquido, se regresa la misma cantidad de energıa, es decir, es el calornecesario para cambiar de fase.
En la seccion 3 ocurre otra transferencia de calor que no es tan significativa como laanterior, pero sı es muy importante, ya que esta establece a que temperatura va a llegar

2.3. VALIDACION DEL MODELO DEL INTERCAMBIADOR DE CALOR TIPO HELICOIDAL ENCHAQUETADO 23
el lıquido despues de ser condensado. Cuando todo el vapor se haya transformado enlıquido, al extraer calor empieza nuevamente a descender la temperatura (calor sensible),alcanzando la temperatura de salida, esto es:
Q3 = U2A (To(t)− Tjo(t)) (2.14)
Como se expreso en las Ecs. (2.12) y (2.14), existen dos coeficientes de transferenciade calor U1 y U2. En el caso de la seccion 1, este coeficiente es muy pequeno comparado conel coeficiente de la seccion 3, por lo que se hace la siguiente suposicion, que la sumatoriade Q1 y Q3 se expresa de la forma:
Q1 + Q3 ≈ U2A (To(t)− Tjo(t)) = UA (To(t)− Tjo(t)) (2.15)
Por lo que la transferencia total de calor queda expresada de la forma:
Qo = Vr∆Hvapc1 + UA (To(t)− Tjo(t)) (2.16)
Sustituyendo la transferencia de calor que existe en el intercambiador de calor dadapor la Ec. (2.16) en el balance de energıa del condensador expresado en la Ec. (2.11) paraambos fluidos, el modelo matematico del intercambiador de calor queda expresado como:
dTo(t)
dt= [Cphv (Ti(t)− Tbc1)− Cph` (To(t)− Tbc1)]
Vr(t)
MCph`
− UA (To(t)− Tjo(t))
MCph`
(2.17)
dTjo(t)
dt=
1
Vc
[Fj(t) (Tji(t)− Tjo(t)) + ∆Hvap
c1 Vr(t) +UA (To(t)− Tjo(t))
Cpjρj
](2.18)
2.3 Validacion del modelo del intercambiador de calor
tipo helicoidal enchaquetado
En esta seccion se aborda la validacion experimental del modelo del intercambiadorde calor. Para ello fue necesario realizar una serie de experimentos en la planta piloto dela columna de destilacion binaria.
La mezcla binaria elegida para los experimentos de este trabajo fue Metanol-Etanol,

24 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
cuyas propiedades termodinamicas la clasifican como una mezcla ideal. Estas propiedadesson listadas en la Tabla A.2. La pureza de los componentes (Metanol y Etanol) emplea-dos en las pruebas no es total, sin embargo se consideran como tales para mantener lasuposicion de una mezcla binaria y no alterar la relacion de equilibrio (Diagrama de equi-librio B.1).
La planta de destilacion binaria donde se realizaron las pruebas experimentales es laque se encuentra en el CENIDET, la cual tiene sensores RTD′s P t100 (Termoresistenciasde platino) para la medicion de temperatura, las cuales se encuentran en la entrada delcondensador ası como en los platos: 2, 4, 6, 7, 9, 11 y en el hervidor. Ademas se consideranlas caracterısticas fısicas de la columna de destilacion listadas en la Tabla A.1.
En la Tabla A.3, se presentan los parametros iniciales de la mezcla utilizada en laspruebas experimentales, los cuales estan involucrados en la obtencion del flujo de vaporen la zona de enriquecimiento, el cual es el vapor a condensar en el intercambiador de calor.
Las propiedades termodinamicas del vapor a condensar (Metanol) se muestran enla Tabla A.4. Ası tambien las propiedades fısicas y quımicas del lıquido de enfriamiento(agua), que se utiliza en la columna de destilacion binaria se encuentran en el la Tabla A.5.
Las mediciones de las temperaturas son registradas por medio de la estacion demonitoreo de la columna de destilacion, con el fin de validar el modelo matematico delcondensador. Cabe mencionar que el perıodo de muestreo de las mediciones de tempe-ratura es de 0.2 minutos y las muestras son tomadas a partir del momento en el que entodas las etapas de la columna de destilacion han alcanzado el equilibrio.
En la temperatura de salida del lıquido de enfriamiento Tjo no existe algun sensorcon que cuente el equipo, pero la lectura de dicha temperatura se realizo a traves de untermometro digital que cuenta con un termopar, el cual se coloco en las paredes de vidriodel tubo de salida del lıquido condensado, cabe mencionar que dicha pared es mas delgadaque la del resto de la columna, el grosor de las paredes del cuerpo de la columna de des-tilacion es de 2mm, por lo que se considera que la medicion del termometro nos da unarepresentacion fiel de la temperatura de salida del lıquido de enfriamiento.
Para validar el modelo matematico del condensador se llevaron a cabo tres experi-mentos, los cuales tienen diferentes senales de excitacion y distintos tiempos de aplicacion.Las senales de entrada de los experimentos se describen a continuacion en las Tablas 2.1,2.2 y 2.3, posteriormente se muestran los datos obtenidos de la planta piloto, que son tem-peraturas de salida del intercambiador de calor, y se valida el modelo del intercambiadorde calor de tipo helicoidal enchaquetado. Cabe mencionar que el modelo del intercambi-

2.3. VALIDACION DEL MODELO DEL INTERCAMBIADOR DE CALOR TIPO HELICOIDAL ENCHAQUETADO 25
ador de calor tipo helicoidal enchaquetado se programo en Simulink.
Experimento 1. Validacion del modelo matematico del condensador heli-coidal enchaquetado considerando cambios en el flujo de enfriamiento Fj y enla valvula de recirculacion R:
El objetivo de este experimento es apreciar el efecto que causan los cambios del flujode enfriamiento Fj y de la valvula de recirculacion R, en las temperaturas de salida delcondensador To y Tjo.
Las senales de excitacion de la columna de destilacion binaria para este experimentoson las presentadas en el Tabla 2.1. En esta tabla es facil apreciar la secuencia en la quese aplicaron las senales de excitacion.
Tabla 2.1: Senales de entrada en el experimento 1
Entrada Senal Tiempo
Potencia Calorıfica (Qb) 1000 Watts 0 min
Flujo de alimentacion (Fv) 0 ml/min 0 min
Temperatura del lıquido 25 C 0 min
de enfriamiento (Tji)
Flujo del lıquido 3.33 l/min 0 min
de enfriamiento (Fj)
Valvula de recirculacion (R) Tren de pulsos: 1.2 min
Ton = 12 seg y Toff = 24 seg
Flujo del lıquido Escalon de 3.33 l/min a 6.66 l/min 21.65 min
de enfriamiento (Fj)
Flujo del lıquido Escalon de 6.66 l/min a 2.5 l/min 36.3 min
de enfriamiento (Fj)
Las condiciones iniciales del experimento son las que se muestran en la Tabla 2.1para las entradas de la columna de destilacion: Qb, Fv, Fj y Tji, donde las temperaturasT12, Ti, To y Tjo estan en condiciones estables.

26 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
A traves de las senales de entrada descritas en la Tabla 2.1 se obtienen las tem-peraturas del hervidor y del vapor en la entrada del condensador (vease Fig. 2.5). Latemperatura del hervidor T12, es necesaria para el calculo del flujo de vapor en la zona deempobrecimiento Vs (como se aprecia en las Ecs. (B.1) y (B.4) ) y con esto se calcula elflujo de vapor en la zona de enriquecimiento Vr dada en la Ec. (B.2). La temperatura ala que entra el vapor a condensar Ti en el intercambiador de calor, es necesaria por que esuna de las entradas del modelo del intercambiador de calor.
0 10 20 30 40 5064
65
66
67
68
69
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura del vapor a condensar (Ti)
1.2
0 10 20 30 40 5069
69.5
70
70.5
71
71.5
72
72.5
73
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura del hervidor (T12
)
1.2
Figura 2.5: Temperatura del hervidor y del vapor de entrada al condensador Ti.
En la Fig. 2.5 se aprecia como las dos temperaturas Ti y T12 empiezan en condicionesestables, posteriormente aumentan en el minuto 1.2, debido a que se excita la valvula dereflujo, se observa que no dejan de aumentar, esto se debe a que el vapor aumenta y ellıquido de la mezcla en el hervidor disminuye. Ya que solo se esta extrayendo mezcla yno se esta alimentando la columna en el plato de alimentacion Fv = 0. El aumento de lastemperaturas Ti y T12 seguira hasta que se termine la mezcla en el hervidor. Ademas seobserva que cuando existe el cambio en el flujo de lıquido de enfriamiento Fj, la tempera-tura de vapor a condensar Ti no cambia.
Por otro lado, en la Fig. 2.6 se presentan los resultados obtenidos en las salidas delintercambiador de calor helicoidal enchaquetado. En esta graficas se presentan los datosexperimentales obtenidos de la planta piloto To y Tjo, comparados con los resultados delmodelo propuesto para el condensador helicoidal enchaquetado. En la Fig. 2.6 se observanlas temperaturas To y Tjo en la planta piloto, dichas temperatura inicialmente se encuen-tran en condiciones estables, posteriormente existe un cambio en el minuto 1.2, dondela temperatura To empieza a aumentar, esto se debe principalmente a la dinamica de latemperatura de entrada Ti en el condensador, este aumento permanecera hasta que la tem-peratura de entrada Ti se estabilice. En el caso de la temperatura de salida Tjo no existeningun cambio significativo en este lapso de tiempo. Posteriormente, en el minuto 21.65

2.3. VALIDACION DEL MODELO DEL INTERCAMBIADOR DE CALOR TIPO HELICOIDAL ENCHAQUETADO 27
0 10 20 30 40 5056
57
58
59
60
61
62
Tiempo (minutos)
Tem
pera
tura
(°C
)Temperatura de salida del líquido condensado (T
o)
To Modelo
To Experimental
1.2 21.65 36.3
0 10 20 30 40 5026
27
28
29
30
31
32
33
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Modelo
Tjo Experimental
21.65 36.3
Figura 2.6: Validacion del modelo del intercambiador de calor.
existe un aumento en el flujo del lıquido de enfriamiento Fj, por lo que la temperatura desalida del lıquido de enfriamiento Tjo disminuye. Por ultimo se realiza una disminucionen el flujo de enfriamiento Fj, lo que provoca que la temperatura de salida Tjo aumente.Estos dos ultimos cambios no se reflejan en la dinamica de la temperatura de salida To.
En el caso de la temperatura de salida To del modelo del condensador helicoidalenchaquetado, se aprecia como la temperatura tambien aumenta de la misma manera queen los datos reales, pero existe un error de 1C, del minuto 21.65 al 36.3, donde la tem-peratura de salida del lıquido condensado del modelo disminuye, debido a que existe unadisminucion del flujo del agua de enfriamiento. En los datos experimentales no se apreciaque existe algun cambio en esta temperatura. Posteriormente del minuto 36.3, el modelovuelve a tener una representacion aceptable comparada con los datos experimentales.
En la Fig. 2.6 se aprecia la comparacion de la temperatura de salida del lıquido deenfriamiento Tjo de los datos obtenidos de la planta piloto con la respuesta del modeloa esta temperatura. Se observa una dinamica del modelo similar a los datos reales de laplanta, el error que existe es de magnitud, dicho error se presenta cuando se disminuye elflujo del lıquido de enfriamiento en el minuto 36.3, el cual es aproximadamente de un 1C.Antes del minuto 36.3 el error es de 0.3C.
Experimento 2. Validacion del modelo matematico del condensador heli-coidal enchaquetado considerando cambios en la valvula de recirculacion R yen el flujo de alimentacion Fv:
El objetivo de este experimento es apreciar el efecto que causan los cambios del flujo

28 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
de alimentacion Fv y de la valvula de recirculacion R, en las temperaturas de salida delcondensador To y Tjo.
Las senales de excitacion de la columna de destilacion binaria para este experimentoson las presentadas en el Tabla 2.2. En esta tabla es facil apreciar la secuencia en la quese aplicaron las senales de excitacion.
Tabla 2.2: Senales de entrada en el experimento 2
Entrada Senal Tiempo
Potencia Calorıfica (Qb) 1000 Watts 0 min
Flujo de alimentacion (Fv) 0 ml/min 0 min
Temperatura del lıquido 26 C 0 min
de enfriamiento (Tji)
Flujo del lıquido 3.33 l/min 0 min
de enfriamiento (Fj)
Valvula de recirculacion (R) Tren de pulsos: 0 min
Ton = 9 seg y Toff = 24 seg
Flujo de alimentacion (Fv) Escalon de 0 ml/min a 25.5 ml/min 2.8 min
Valvula de recirculacion (R) Tren de pulsos: 12.7 min
Ton = 12 seg y Toff = 24 seg
Flujo de alimentacion (Fv) Escalon de 25.5 ml/min a 49.5 ml/min 38.6 min
Las condiciones iniciales del experimento son las que se muestran en la Tabla 2.2para las entradas de la columna de destilacion: Qb, Fv, Fj y Tji, donde las temperaturasT12, Ti, To y Tjo estan en condiciones estables.
A traves de las senales de entrada descritas en la Tabla 2.2 se obtienen las tempera-turas del hervidor y del vapor en la entrada del condensador (vease Fig. 2.7), las cualesson necesarias para el calculo de los flujos de vapor. La temperatura a la que entra elvapor a condensar Ti en el intercambiador de calor, es necesaria por que es una de lasentradas del modelo del intercambiador de calor.

2.3. VALIDACION DEL MODELO DEL INTERCAMBIADOR DE CALOR TIPO HELICOIDAL ENCHAQUETADO 29
0 10 20 30 40 5064
65
66
67
68
69
Tiempo (minutos)
Tem
pera
tura
(°C
)Temperatura del vapor a condensar (T
i)
2.8 38.612.7
0 10 20 30 40 5069
69.5
70
70.5
71
71.5
72
72.5
73
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura del hervidor (T12
)
2.8
Figura 2.7: Temperatura del hervidor y del vapor de entrada al condensador.
En la Fig. 2.7 se aprecia que las dos temperaturas Ti y T12 empiezan a aumentar enel minuto 2.8, debido a que se presenta un cambio en el flujo de alimentacion Fv, se observaque hay aumentos en las temperaturas Ti y T12. Posteriormente se acciona la valvula dereflujo R en el minuto 12.7. Esto ocasiona que las temperaturas Ti y T12 aumenten, hastallegar a estabilizarse en el minuto 35. Por ultimo se realiza un aumento en el flujo dealimentacion en el minuto 38.6, lo que ocasiona un aumento de 0.5C en la temperaturaTi, llegando a estabilizarse mas rapidamente, esto se logra en el minuto 41.5. Ademasse aprecia que los aumentos de temperatura en Ti y T12 no son significativos, debido aque en este experimento ya existe un flujo de alimentacion y compensa la salida de lamezcla, debido a la valvula de reflujo. Tambien se puede observar que la temperatura deentrada en el intercambiador de calor aumenta pero de una manera mas lenta y que llegaa estabilizarse, esto se debe a lo ya mencionado.
Por otro lado, en la Fig. 2.8 se observan las temperaturas de salida To y Tjo enel condensador helicoidal enchaquetado. Se observa que las temperaturas inicialmente seencuentran en estado estable y permanecen ası hasta el minuto 2.8, minuto en el cual sepresenta un flujo de alimentacion Fv, la temperatura To aumenta de forma lenta. Poste-riormente se presenta una excitacion en la valvula de reflujo R en el minuto 12.7, lo queprovoca que la temperatura To siga aumentando de una forma gradual, esta temperaturase estabiliza en el minuto 35. Por ultimo existe un aumento en el flujo de alimentacionFv, lo que ocasiona que exista un aumento en la temperatura To, la cual se estabiliza enel minuto 41.5. En el caso de la temperatura Tjo, esta no sufrio ningun cambio.
Tambien en la Fig. 2.8 se observan los resultados obtenidos en las temperaturas desalida del intercambiador, tanto los datos experimentales de la planta como los obtenidospor el modelo del intercambiador de calor. En el caso de la temperatura de salida del

30 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
0 10 20 30 40 5056
57
58
59
60
61
62
Tiempo (minutos)
Tem
pera
tura
(°C
)Temperatura de salida del líquido condensado (T
o)
To Modelo
To Experimental
2.8 38.6
0 10 20 30 40 5027
28
29
30
31
32
33
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Modelo
Tjo Experimental
Figura 2.8: Validacion del modelo del intercambiador de calor.
lıquido condensado se puede apreciar que no existe diferencia significativa del modelo conrespecto a los datos de la planta piloto, el error a lo largo de la prueba es de 0.12C parael To y de 0.2C para Tjo (vease Tabla 2.4). Se observa que la temperatura aumenta deforma gradual hasta llegar a estabilizarse en el minuto 41.5, debido a que ya existe unflujo de alimentacion Fv y la columna tambien lo hace. Lo mismo sucede para el caso dela temperatura de salida del lıquido de enfriamiento, pues los datos obtenidos de la plantapiloto y del modelo del intercambiador son similares, se aprecia que no existe un cambioen la temperatura de salida del lıquido de enfriamiento, debido a que no se presento uncambio en el flujo del lıquido de enfriamiento.
Experimento 3. Validacion del modelo matematico del condensador he-licoidal enchaquetado considerando cambios en la valvula de recirculacion R,en el flujo de alimentacion Fv y en el flujo del lıquido de enfriamiento Fj:
El objetivo de este experimento es apreciar el efecto que causan cambios en las en-tradas de la columna de destilacion, los cuales son del flujo de alimentacion Fv, de lavalvula de recirculacion R y del flujo de lıquido de enfriamiento Fj, en las temperaturasde salida del condensador To y Tjo.
Las senales de excitacion de la columna de destilacion binaria para este experimentoson las mostradas en el Tabla 2.3. En dicha tabla es posible apreciar la secuencia en laque se aplicaron las senales de excitacion.

2.3. VALIDACION DEL MODELO DEL INTERCAMBIADOR DE CALOR TIPO HELICOIDAL ENCHAQUETADO 31
Tabla 2.3: Senales de entrada en el experimento 3
Entrada Senal Tiempo
Potencia Calorıfica (Qb) 1000 Watts 0 min
Flujo de alimentacion (Fv) 0 ml/min 0 min
Temperatura del lıquido 27 C 0 min
de enfriamiento (Tji)
Flujo del lıquido de 3.33 l/min 0 min
enfriamiento (Fj)
Valvula de recirculacion (R) Tren de pulsos: 3.3 min
Ton = 12 seg y Toff = 24 seg
Flujo de alimentacion (Fv) Escalon de 0 ml/min a 4 ml/min 16.5 min
Flujo de alimentacion (Fv) Escalon de 4 ml/min a 25.5.5 ml/min 19.5 min
Valvula de recirculacion (R) Abierta 37.8 min
Flujo del lıquido Escalon de 3.33 l/min a 6.66 l/min 52.6 min
enfriamiento (Fj)
Valvula de recirculacion (R) Tren de pulsos: 57 min
Ton = 3 seg y Toff = 24 seg
Las condiciones iniciales del experimento son las que se muestran en la Tabla 2.3para las entradas de la columna de destilacion: Qb, Fv, Fj y Tji, donde las temperaturasT12, Ti, To y Tjo estan en condiciones estables.
Primeramente se muestran las temperaturas del hervidor y del vapor en la entradadel condensador obtenidas (vease Fig. 2.7) con las senales de entrada de la Tabla 2.3, lascuales son necesarias para el calculo de los flujos de vapor. La temperatura a la que entrael vapor a condensar Ti en el intercambiador de calor, es necesaria, por que es una de lasentradas del modelo del intercambiador de calor.
En la Fig. 2.9 se aprecia que inicialmente las temperaturas Ti y T12 se encuentranen estado estable. Posteriormente, en el minuto 3.3, se observa que existe un aumentoen la temperatura To, debido a la excitacion que se presenta en la valvula de reflujo,cabe mencionar que el aumento de estas temperaturas si es significativo con respecto a losexperimentos anteriores. Luego, en los minutos 16.5 y 19.5, se presentan dos aumentos

32 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
0 10 20 30 40 50 60 70 757564
65
66
67
68
69
70
71
72
Tiempo (minutos)
Tem
pera
tura
(°C
)Temperatura del vapor a condensar (T
i)
3.3 19.5 37.8 57
0 10 20 30 40 50 60 70 7570
71
72
73
74
75
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura del hervidor (T12
)
58
Figura 2.9: Temperatura del hervidor y del vapor de entrada al condensador.
en el flujo de alimentacion Fv, lo que ocasiona inicialmente que se disminuya el aumentode temperatura, pero a partir del minuto 22 se empieza a observar un descenso en latemperatura Ti, en el caso de la temperatura T12 se estabiliza. Luego, en el minuto 37.8,se procede a abrir totalmente la valvula de reflujo y empieza a presentar un aumentosignificativo en la temperatura del vapor de entrada al intercambiador de calor, hastaestabilizarse, en el minuto 43, se puede apreciar que la temperatura del vapor se estabilizaen un valor de 71C, en el caso de la temperatura T12 se observa que existe un aumento.Luego se presenta un aumento en el flujo del lıquido de enfriamiento Fj, dicho cambio nose ve reflejado en las dos temperaturas. Por ultimo se hace un cambio en la excitacion dela valvula de reflujo y empieza a disminuir la temperatura Ti, de forma muy considerable,la temperatura T12 permanece estable.
0 10 20 30 40 50 60 70 7556
58
60
62
64
66
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido condensado (To)
To Modelo
To Experimental
3.8 38 57
0 10 20 30 40 50 60 70 757527
28
29
30
31
32
33
34
35
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Modelo
Tjo Experimental
52.6
Figura 2.10: Validacion del modelo del intercambiador de calor.

2.3. VALIDACION DEL MODELO DEL INTERCAMBIADOR DE CALOR TIPO HELICOIDAL ENCHAQUETADO 33
Por otro lado, en la Fig. 2.10 se observan las temperaturas de salida To y Tjo en elcondensador helicoidal enchaquetado. Se observa que las dos temperaturas inicialmente seencuentra en estado estable. En el minuto 3.8, empieza a aumentar la temperatura To deforma considerable, debido a la excitacion de la valvula de reflujo R. Posteriormente, enlos minutos 16.5 y 19.5, se presentan aumentos del flujo de alimentacion Fv, los cuales oca-sionan que la temperatura To empiece a decrecer en el minuto 22, cabe mencionar que loscambios que se han realizados hasta ahora no se han visto reflejados en la temperatura Tjo.
Luego, en el minuto 37.8, se presenta una apertura total en la valvula de reflujo R, loque ocasiona que la temperatura To empiece a aumentar de forma muy considerable, hastaestabilizarse en el minuto 42, con una temperatura de 63C, dicha temperatura es menora la temperatura de ebullicion del componente mas ligero de la mezcla, debido a que sufreun subenfriamiento en las paredes de los tubos, en este caso el componente mas ligero esel Metanol el cual tiene una temperatura de ebullicion de 64.7C. Con este cambio enla valvula de recirculacion R se aprecia un aumento casi de 1C en la temperatura Tjo.Posteriormente, en el minuto 52.6, existe un aumento del flujo del lıquido de enfriamientoFj, lo que ocasiona que la temperatura Tjo disminuya al existir un mayor flujo Fj, en elcaso de la temperatura To, esta no presento ningun cambio.
Por ultimo se realiza un cambio en la excitacion de la valvula de reflujo R, en elminuto 57.4, lo que ocasiona que la temperatura To disminuya de forma gradual hastaestabilizarse en el minuto 71, a una temperatura de 58.2C, en el caso de la temperaturaTjo, no hubo ningun cambio ante la presencia de la senal de excitacion en el minuto 52.6.
Tambien en la Fig. 2.10 se presentan los datos obtenidos tanto de la planta pilotocomo los del modelo del intercambiador de calor. Los datos obtenidos de la planta pilotoen el caso de la temperatura de salida del lıquido condensado tienen una dinamica similar,pero las magnitudes son diferentes a las obtenidas por el modelo, en el cual se apreciaque existe una magnitud menor a la de los datos de la planta piloto. Donde se observaque los datos de la temperatura en la planta piloto empiezan a aumentar al excitar lavalvula de reflujo en el minuto 3.3. Posteriormente disminuyen en el minuto 22, debidoa los cambios en el flujo de alimentacion que se presentan en la planta, en los minutos16.5 y 19.5. Luego se presenta una apertura total de la valvula de reflujo, lo que ocasionaun aumento significativo en la temperatura de salida hasta estabilizarse en 63C, cabemencionar que esta temperatura es inferior a la temperatura de ebullicion del componentemas ligero de la mezcla (metanol), lo que confirma que existe otro subenfriamiento despuesde pasar de vapor a lıquido, debido a que la temperatura de salida del lıquido condensadono llega a la temperatura de ebullicion, es donde se puede apreciar la existencia de U , eneste caso existe una diferencia de magnitudes entre la temperatura To experimental con ladel modelo, pero con una dinamica similar.

34 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO
Por ultimo se realizo un cambio en la valvula de reflujo R en el minuto 57.4, loque ocasiona que disminuya la temperatura To de la planta y del modelo teniendo unadinamica similar y con error de magnitud de 1C.
En la temperatura de salida del lıquido de enfriamiento existe un error de 1C hastael minuto 28 del modelo con respeto a los datos experimentales. Posteriormente, existeun aumento en la temperatura To en el caso experimental, dicho aumento no se apreciaen el caso del modelo. En el minuto 52.6 se presenta un aumento en el flujo del lıquidode enfriamiento y la temperatura disminuye en la planta piloto, ası como tambien en larespuesta del modelo, existe un error de 0.4C.
Analisis del error de modelado
Haciendo un analisis cualitativo del modelo propuesto a partir de los experimentosanteriores, se puede mencionar que la respuesta dinamica del modelo es aceptable conrespecto a las mediciones realizadas en la planta piloto. Sin embargo, la aproximacion delmodelo se puede cuantificar mediante el calculo del error entre los datos obtenidos en losexperimentos y los resultados obtenidos del modelo, dicha evaluacion del error se calculapor el error medio cuadratico. La expresion del error empleado esta dada por la siguienteecuacion:
EMC =
√√√√√N∑
j=1
(TReal
j − TModeloj
)2
N(2.19)
donde N es el numero de datos obtenidos en el experimento, j es la iteracion en que seencuentra la sumatoria, T es la temperatura de salida del condensador y el error mediocuadratico tiene unidades de C.
El error medio cuadratico proporciona el error promedio a lo largo del experimento.Los valores numericos del error se muestran en la Tabla 2.4 para cada experimento reali-zado, donde los valores de los errores mostrados son relativos a las pruebas experimentalesrealizadas, por esta razon no se pueden generalizar para otros experimentos. El errordepende de muchos factores como: las condiciones de operacion de la planta, la resolucionen la adquisicion de los datos, la presencia de ruido en las mediciones, la suposicionde componentes puros, la suposicion de que el coeficiente de transferencia de calor y laentalpıa de vaporizacion son constantes, etc. Por lo que el error puede ser menor o mayordependiendo de los factores mencionados.

2.4. CONCLUSIONES 35
Tabla 2.4: Errores medio cuadratico del modelo del condensador helicoidal enchaquetado
Temperatura de salida Experimento 1 Experimento 2 Experimento 3
del condensador
Temperatura del lıquido 0.4C 0.12C 0.76C
condensado (To)
Temperatura del lıquido 0.54C 0.2C 0.67C
de enfriamiento (Tjo)
2.4 Conclusiones
En este capıtulo se desarrollo el modelo matematico del intercambiador de calor detipo helicoidal enchaquetado, dicho modelo se desarrollo a traves de un balance de energıaen el condensador. Tambien se presenta la validacion del modelo mediante la comparacionde datos obtenidos en pruebas experimentales en la planta piloto de la columna de desti-lacion, bajo diferentes excitaciones en las senales de entrada del proceso.
En el caso del experimento 1 se obtiene un error promedio en la temperatura To de0.4C, debido al cambio en el flujo del lıquido de enfriamiento en gran medida, dondela temperatura del modelo decrece 1C, no ası en la planta piloto. Para el caso de latemperatura Tjo el error promedio es de 0.54C, esto es debido al error de magnitud encasi toda la prueba.
Para el experimento 2 los errores promediados son de 0.12C para To y de 0.2C paraTjo, debido a que en este experimento las temperaturas del modelo fueron similares a lasde los datos experimentales en todo el intervalo de tiempo, esto se debe principalmente aque en este experimento no existen cambios significativos en las senales de excitacion.
Por ultimo, en el experimento 3 se obtuvieron mayores errores, debido a que enesta prueba se realizaron distintos cambios en las senales de entrada de la planta, lo queocasiono que existieran errores de magnitudes en ciertos intervalos de tiempo en el modelo.
Con los anteriores valores de error se puede constatar la aceptable aproximacion delmodelo con respecto a los datos de la planta piloto.

36 CAPITULO 2. MODELADO DE INTERCAMBIADORES DE CALOR TIPO HELICOIDAL ENCHAQUETADO

Capıtulo 3
Diseno de observadores
adaptables
El objetivo de este capıtulo es el diseno de diferentes tipos de observadores de estadoadaptables propuestos en esta tesis para resolver el problema de estimacion de estados yparametros en sistemas no lineales. Estas estimaciones, son posibles al asegurar ciertascondiciones de observabilidad, por lo que se definen propiedades para satisfacer la observa-bilidad en sistemas no lineales.
En la Seccion 3.1 se presentan conceptos relevantes sobre la observabilidad en sis-temas no lineales, ası como un ejemplo de la determinacion de la observabilidad en unaclase de sistemas no lineales. En la Seccion 3.2 se presenta el diseno de un observador deforma adaptable para una clase de sistemas no lineales. En la Seccion 3.3 se presenta eldiseno de un observador de gran ganancia, con el enfoque de observador adaptable. En laSeccion 3.4 se presenta el diseno de un observador proporcional-integral, adaptandolo a laestimacion de un parametro interno del sistema no lineal. En la Seccion 3.5 se presenta undiseno de un observador de Kalman extendido con estados aumentados, considerando unanueva alternativa para el calculo de las matrices de varianza y covarianza. Finalmente enla Seccion 3.6 se presentan algunas conclusiones.
3.1 Observabilidad
El concepto de observabilidad es util al resolver problemas de reconstruccion de es-tados no medibles a partir de variables que si lo son en el menor tiempo posible.
37

38 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
De forma general, el problema de observabilidad en sistemas no lineales es el si-guiente: ¿Bajo que condiciones se puede distinguir los estados iniciales de una entradaal sistema no lineal descrito mediante la observacion de sus salidas?. Se examinara estapropiedad localmente. Para esto se necesita definir los conceptos de estados indistinguiblesy observabilidad [Hangos y col., 2004].
Considere una clase de sistemas no lineales a fines de control:
x(t) = f(x) +m∑
i=1
gi(x)ui i = 1, . . . , m
y = h(x)(3.1)
Definicion 3.1 (Estados indistinguibles, observabilidad) Un par de estados x1, x2
son llamados indistinguibles (denotado mediante x1Ix2) para el sistema dado en (3.1) si
para cada entrada u las funciones de salidas y(t, 0, x1, u) y y(t, 0, x2, u) para t ≥ 0 son
identicas.
El sistema es llamado observable si x1Ix2 implica x1 = x2.
Las versiones de observabilidad local [Hangos y col., 2004], son las siguientes:
Definicion 3.2 (Estados indistinguibles-V , observabilidad local) Sea V ⊂ X un
conjunto abierto y x1, x2 ∈ V . Los estados x1 y x2 son indistinguibles en V (denotado
mediante x1IV x2 ), si para cada entrada admisible u con las soluciones x(t, 0, x1, u) y
x(t, 0, x2, u) dentro de V para t ≤ T , las funciones de salidas y(t, 0, x1, u) y y(t, 0, x2, u)
son las mismas para t ≤ T .
El sistema no lineal dado en la Ec. (3.1) es localmente observable en x0, si existe
una vecindad W de x0 tal que para cada vecindad V ∈ W de x0 la relacion x0IV x1
implica x1 = x0. Si el sistema es localmente observable en cada x0, entonces es localmente
observable.
Definicion 3.3 (Espacio observable) El espacio observable O del sistema dado en la
Ec. (3.1) es el espacio lineal de funciones en X que contienen h1 . . . hp y todas las repeti-
ciones de las derivadas de Lie.
Lτ1Lτ1 . . . Lτkhj, j = 1, . . . , p, k = 1, 2, . . . (3.2)

3.1. OBSERVABILIDAD 39
donde τi ∈ g0, g1, . . . gm, i = 1, . . . , k.
Recordar que el espacio observable contiene las funciones de salida y todas susderivadas a lo largo de la trayectoria del sistema.
El siguiente teorema da una condicion suficiente para la observabilidad local.
Teorema 3.1 Considere el sistema dado en la Ec.(3.1) con dimX = n y asuma que
dimO(x0) = n donde:
dO(x) = span dH(x)|H ∈ O , x ∈ X
Entonces el sistema es localmente observable en x0.
Basado en esto, es util definir la llamada observabilidad de codistribucion.
Definicion 3.4 (Observabilidad de codistribucion) La observabilidad de codistribu-
cion dO de una entrada al sistema no lineal con un espacio observable O esta definida
como:
dO(x) = span dH(x)|H ∈ O , x ∈ X (3.3)
Si el rango de la observabilidad de codistribucion es igual al numero de estados, elsistema es observable en x0. Para esto se construye un algoritmo para la observabilidadde codistribucion.
Algoritmo para la construccion de la Observabilidad de Codistribucion
1. Punto de inicio
Ω0 = spandh1, . . . , dhp
2. Desarrollo de la observabilidad de codistribucion
Ωk = Ωk−1 +m∑
i=0
LgiΩk−1

40 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
3. Detencion del criterioSi existe una k∗ tal que Ωk∗ = Ωk∗+1, entonces
Ω0 = Ωk∗ = 〈g0, . . . , gm|Ω0〉
La dimension de la codistribucion Ωk∗ no singular en x0 es igual a la dimension dela observabilidad de codistribucion en x0.
Si la dimension de la observabilidad de codistribucion es estrictamente menor quen− estados, entonces se encontro una transformacion de coordenadas local, la cual mues-tra la combinacion no lineal no observable de las variables de estados.
3.1.1 Ejemplo: Intercambiador de calor tipo tubos concen-
tricos
Para ejemplificar el analisis de la observabilidad de un sistema no lineal se consideroun intercambiador de calor tipo tubos concentricos en configuracion de contraflujos. Elmodelo no lineal del intercambiador de calor se presenta en la Ec. (C.1).
Teniendo en cuenta que:
k1 =2UA
vccpcρc
y k2 =2UA
vhcphρh
el modelo descrito en (C.1) se representa por:
dTco(t)
dt= k1∆T + 2
(Tci − Tco
vcρc
)Fc
dTho(t)
dt= −k2∆T + 2
(Thi − Tho
vhρh
)Fh
(3.4)
donde cabe mencionar que ∆T es la diferencia de temperaturas expresado por la LMTDdada en la Ec. (C.3).
El modelo representado por las Ecs.(3.4) tiene la forma del sistema dado en la Ec.
(3.1), donde el vector de entradas u =(
Fc Fh
)Ty las funciones f y g del sistema estan

3.1. OBSERVABILIDAD 41
dadas por:
g0(x) = f(x) =
(k1∆T−k2∆T
)
g1(x) =
2
(Tci − Tco
vcρc
)
0
g2(x) =
0
2
(Thi − Tho
vhρh
)
siendo:gi(x) =
(g1(x) g2 (x)
)
Cabe mencionar que ∆T esta en funcion de Tco y Tho (Vease (C.3)), las cuales sonvariables de estado. Segun las variaciones de las diferencias de temperatura ∆T1 y ∆T2,∆T puede expresarse de dos maneras (como se aprecia en (C.3)). Por lo que f(x) serepresenta por:
g0(x) = f(x) =
(k1 (Tho − Tci)−k2 (Tho − Tci)
)∆T1 = ∆T2
k1
(Tho − Tci)− (Thi − Tco)
lnTho − Tci
Thi − Tco
−k2
(Tho − Tci)− (Thi − Tco)
lnTho − Tci
Thi − Tco
∆T1 6= ∆T2
(3.5)
Se considera que la ecuacion de salida del sistema esta dada por:
y(t) = h(x) = Tco (3.6)
Con lo anterior se desarrolla el analisis de observabilidad de codistribucion, siguiendolos pasos del algoritmo de construccion de la Observabilidad de Codistribucion, descritoanteriormente. Primeramente se desarrolla para ∆T1 = ∆T :
1. El primer paso del algoritmo es:
Ω0(x) = span dh(x) = span[
1 0]
2. El producto de Lie de ω = dh a lo largo de f acorde a la definicion es:

42 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
Para i=0
Lg0ω(x) = Lfω(x) = fT (x)
(∂ωT
ωx
)T
+ ω(x)∂f
∂x=
[0 k1
]
Para i=1Lg1ω(x) =
[ −2/vcρc 0]
Para i=2Lg2ω(x) =
[0 0
]
3. Despues de un primer paso Ωk=1, la observabilidad de codistribucion esta dada por:
Ω1(x) = span[
1 0],[
0 k1
]
En lo anterior se puede observar que el sistema satisface la condicion de observabili-dad local, ya que su dimension es 2 en cualquier punto del espacio de estados y es igual alnumero de estados.
Ahora se desarrolla la observabilidad de codistribucion para ∆T1 6= ∆T2:
1. El primer paso del algoritmo es similar al anterior, debido a que la salida es la misma.
2. El producto de Lie de ω = dh a lo largo de f acorde a la definicion es:
Para i=0 :
Lg0ω(x) = Lfω(x) =
k1β −
k1 (∆T2 −∆T1)
∆T1
β2
k1β −k1 (∆T2 −∆T1)
∆T2
β2
siendo:
β = ln
(∆T2
∆T1
)
Lg1ω(x) y Lg2ω(x) son iguales a los calculados en el caso anterior.
3. Despues de un primer paso Ωk=1, la observabilidad de codistribucion esta dada por:
Ω1(x) = span
[1 0
],
k1β −
k1 (∆T2 −∆T1)
∆T1
β2
k1β −k1 (∆T2 −∆T1)
∆T2
β2

3.2. OBSERVADOR DE FORMA ADAPTABLE 43
Se puede apreciar que el sistema satisface la condicion de observabilidad local, yaque su dimension es 2 en cualquier punto del espacio de estados, como en el caso anterior.Por lo que el sistema no lineal del intercambiador de calor tipo tubos concentricos enconfiguracion de contraflujo con la salida seleccionada Tco es localmente observable paratodos los puntos del espacio de estados.
3.2 Observador de forma adaptable
Un observador adaptable es un algoritmo recursivo que se usa para estimar los es-tados de un sistema con parametros desconocidos o conjuntamente estima los estados ylos parametros desconocidos del sistema. La mayorıa de los disenos de esos observadoresadaptables se basan en formas especıficas de los sistemas considerados, por lo que puedenser llamados observadores de forma adaptable.
En el trabajo de [Besancon, 2000], el autor propone la unificacion de un observadoradaptable, para sistemas de la forma expresada en la Ec. (3.7). En este trabajo, sepresentan algunas propiedades que permiten la estimacion asintotica de estados a pesarde los parametros desconocidos.
y(t) = α (y(t), z(t), u(t)) + β (y(t), z(t), u(t)) θ(t)
z(t) = γ (y(t), z(t), u(t))(3.7)
y ∈ Rp, z ∈ Rq, u ∈ Rm y θ ∈ Rr
En el sistema representado en la Ec. (3.7), y (t) ∈ Rp es el vector de salida (es-tados medibles), z (t) ∈ Rq es el vector de los estados no medibles, u (t) ∈ Rm es elvector de entradas limitadas medibles y θ (t) ∈ Rr es el vector de parametros descono-cidos. α (y (t) , z (t) , u (t)) y β (y (t) , z (t) , u (t)) son dos funciones globalmente Lipschitzcon respecto a z(t).
En este trabajo, el diseno se basa, por una parte en una propiedad comun de lossistemas considerados, la cual es la detectabilidad independiente de los parametros, quees el resultado de algunas condiciones de pasividad y puede ser introducida mediante laayuda de transformaciones de coordenadas; y por otro lado en una condicion de excitacionadecuada.
Definicion 3.5 El sistema de la Ec.(3.7) esta de la forma observable adaptable no
lineal sı:
1. y es la salida medida.

44 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
2. Existe una funcion V (t, e), decreciente, definida positiva tal que para cualquier
condicion inicial x0 =
(y0
z0
)para el sistema de la Ec.(3.7), cualquier entrada u
∈ U , cualquier funcion y(t) que satisface la Ec. (3.7) con entrada de control u yy(0) = y0, cualquier z, e ∈ Rq , y cualquier t > 0 tenemos
∂V
∂t(t, e) +
∂V
∂e(γ (y (t) , e + z, u (t) , t)− γ (y (t) , z, u (t) , t)) 6 −k (e) , (3.8)
para alguna funcion k(e) definida positivamente.
3. Para cualquier condicion inicial x0 =
(y0
z0
)para el sistema de la Ec.(3.7), cualquier
entrada u ∈ U , cualquier funcion x (t) =
(y (t)
z (t)
)que satisface la Ec.(3.7) con
entrada de control x(0) = x0, cualquier z, e ∈ Rq, y cualquier t > 0 tenemos
(a)
‖α (y (t) , e + z, u (t) , t)− α (y (t) , z, u (t) , t)‖ 6 γα
√k (e), γα > 0
‖β (y (t) , e + z, u (t) , t)− β (y (t) , z, u (t) , t)‖ 6 γβ
√k (e), γβ > 0
(3.9)
(b)
‖β (y (t) , ζ (t) , u (t) , t)‖ 6 b, b > 0 (3.10)
Notar que el punto 2 significa que una copia de la dinamica γ proporciona un obser-vador para γ. Esto resalta alguna propiedad de detectibilidad del sistema, a pesar de quealgunos estados no medibles de γ no pueden ser observables, aun ası pueden ser estimados.Como una consecuencia, el sistema de la forma de la Ec.(3.7) solo satisface el punto 1 y 2,con lo que se admite un observador de orden reducido, que es un observador que solo es-tima estados no medibles γ. Este observador es robusto con respecto a cualquier parametrodesconocido θ. Este parametro θ puede ser estimado siempre y cuando β cumpla algunacondicion de excitacion apropiada, cumpliendo el punto 3.
La motivacion de la Definicion 3.5 puede resumirse mediante el siguiente resultado[Astorga y col., 2007; Besancon, 2000]:
Proposicion 3.1 Para cualquier sistema en forma observable adaptable no lineal
dado por la Ec. (3.7) (que satisfaga la Definicion 3.5) con θ = 0, existe un observador de

3.3. OBSERVADOR DE GRAN GANANCIA 45
la forma:
˙y (t) = α (y (t) , z (t) , u (t)) + β (y (t) , z (t) , u (t)) θ (t)− ky (y (t)− y (t))
˙z (t) = γ (y (t) , z (t) , u (t))
˙θ (t) = −kθβ
T (y (t) , z (t) , u (t)) (y (t)− y (t))
(3.11)
tal que para algun y (0), z (0), algun y(0), z(0) y alguna u(t) limitada medible, los erroresde estimacion ‖y (t)− y (t)‖ y ‖z (t)− z (t)‖ asintoticamente van a cero cuando t tiende
a infinito, mientras∥∥∥θ (t)− θ (t)
∥∥∥ continua acotada. Tambien, si βT (y, z, u, t) es persis-
tentemente excitada, y el tiempo derivativo se limita, entonces∥∥∥θ (t)− θ (t)
∥∥∥ −−−→t→∞
0.
Las constantes ky > 0 y kθ > 0 son las ganancias del observador. Generalmente, estasganancias del observador son positivas y pueden tener diferentes valores. Sin embargo esrecomendable tomar en cuenta que ky < kθ.
Un ejemplo de la aplicacion de este observador para un intercambiador de calor tipotubos concentricos ha sido publicado en [Astorga y col., 2007].
3.3 Observador de gran ganancia
En los trabajos [Farza y col., 1997, 1998] se propone un observador no lineal quetiene como proposito estimar los estados y parametros internos de una clase de sistema nolineales. Este observador es facil de implementar y de sintonizar, de hecho, la expresionde ganancia del observador esta dada de manera explıcita y es valida en todos lo casos.Esta expresion contiene un solo parametro de sintonizacion, no importando el numerode estados o parametros a estimar del sistema. Ademas, se demuestra que el observadorpropuesto es asintoticamente estable. Este observador utiliza un enfoque de gran ganan-cia propuesto en [Gauthier y col., 1992]. Por lo que este observador se le conoce comoobservador de gran ganancia.
Para desarrollar un observador de gran ganancia, se considera un sistema no linealde la forma:
z1 (t) = f (z1 (t) , s (t)) F1 (z1 (t) , s (t)) z2 (t) + b1 (u (t) , z1 (t) , s (t))
z2 (t) = b2 (u (t) , z1 (t) , s (t)) + ε (t)
y (t) = z1 (t)
(3.12)

46 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
donde el vector de estado z(t) =[
z1(t) z2(t)] ∈ R2n, z1(t), z2(t) ∈ Rn, la entrada
u (t) ∈ Rm, la salida y (t) ∈ Rn y una senal conocida s (t) ∈ Rp; F1 y f son, respectiva-mente, una funcion matricial de n× n y una funcion escalar real (son diferenciables y lasderivadas parciales correspondientes son continuas); ε es una funcion que puede dependerde z, s, u, etc. Se asume que y, u y s son conocidas y ε es una funcion desconocida peroacotada.
El sistema de la Ec. (3.12) puede ser escrito de la siguiente forma condensada:
z = f (z1, s) F (z1, s) z + B (u, z1, s) + ε (t)
y = Cz(3.13)
donde
F (z1, s) =
[0 F1 (z1, s)0 0
], B (u, z1, s) =
[b1 (u, z1, s)
b2 (u, z1, s)
], ε (t) =
[0
ε (t)
]y C = [In, 0]
siendo ln una matriz identidad de n× n.
Se consideran las siguientes suposiciones para el diseno del observador:
1. Existen dos numeros reales α, β que definen el intervalo 0 < α 6 β tales que ∀ξ ∈Rn, ∀t > 0:
α2In 6 F T1 (ξ, s (t)) F1 (ξ, s (t)) 6 β2In
2. Existen dos numeros reales αf , βf que definen el intervalo 0 < αf 6 βf tales que ∀ξ∈ Rn, ∀t > 0:
αf 6 ‖f (ξ, s (t))‖ 6 βf
3. La funcion ε(t) esta acotada.
4. El estado z(t) permanece en un conjunto acotado contenido en R2n
5. ‖s (t)‖ y ‖ds (t) /dt‖ estan acotadas uniformemente.
6. La funcion B es globalmente Lipschitz con respecto a z1, localmente uniforme conrespecto a u y s.
7. F1(z1, s) es globalmente Lipschitz con respecto a z1, localmente uniforme con respectoa s.

3.3. OBSERVADOR DE GRAN GANANCIA 47
Un observador de gran ganancia para el sistema de la Ec. (3.13) es propuesto por[Farza y col., 1997, 1998] aplicado a la estimacion de parametros en un bioproceso, asıcomo tambien se aplico en [Astorga y col., 2001] para le estimacion de parametros en unreactor de polimerizacion:
˙z = f (y, s) F (y, s) z + B (u, y, s)− f (y, s) Λ−1 (y, s) S−1φ CT (Cz − y) (3.14)
donde
i)
z =
[z1
z2
]∈ R2n, z1, z2 ∈ Rn,
(u, s) y y son, respectivamente, las entradas y salidas del sistema de la Ec. (3.13).
ii)
Λ (z1, s) =
[In 00 F1 (z1, s)
]
iii) Sθ es una matriz simetrica unica, definida positiva que satisface la ecuacion algebraicade Lyapunov
φSφ + AT Sφ + SφA− CT C = 0 (3.15)
donde
A =
[0 In
0 0
]y φ > 0
y φ > 0 es el parametro de sintonizacion del observador.
Cuando ε (t) = 0, la convergencia del error de estimacion tiende exponencialmentea cero. En el caso de que ε (t) 6= 0, el error asintotico se puede hacer arbitrariamentepequeno eligiendo valores suficientemente grandes de φ. Sin embargo, los valores suficien-temente grandes de φ deben ser evitados en la practica puesto que el estimador puedeser sensible al ruido de medicion. Ası, la eleccion de φ es un compromiso entre la rapidaconvergencia y la sensibilidad al ruido medicion.
Notese que la solucion de la Ec.(3.15) para un sistema de orden n estados de z1(t),es dada por:
Sφ =
[ 1φIn − 1
φ2 In
− 1φ2 In
2φ3 In
]

48 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
y consecuentemente la ganancia del observador dada por la Ec. (3.14) es:
f (z1, s) Λ−1 (z1, s) S−1φ CT = f (z1, s)
[2φln
φ2F−11 (z1, s)
]
El estado estimado z1 puede ser sustituido por su medicion, y, en la ecuacion delobservador de la Ec. (3.14). Por lo que el observador queda finalmente de la siguientemanera:
˙z = f (y, s) F (y, s) z + B (u, y, s)− f (y, s) Λ−1 (y, s) S−1φ CT (Cz − y) (3.16)
3.4 Observador proporcional-integral
El observador proporcional-integral fue originalmente propuesto para sistemas linea-les, y en artıculos mas recientes se han desarrollado sistemas de deteccion de fallas con estetipo de observador. En el caso de sistemas no lineales existen muy pocos trabajos reporta-dos, algunos de estos son [Bahram y Hossein, 2003; Ramesh y Mukhopadhyay, 2004]. En[Bahram y Hossein, 2003] se da un nuevo diseno de un observador proporcional-integralpara una clase de sistemas no lineales, en el cual la ganancia integral es usada para esta-bilizar la dinamica del error de estimacion sin ruido, mientras la ganancia proporcional esusada para desacoplar un disturbio.
En el caso de sistemas lineales se considera el siguiente sistema:
x(t) = Ax(t) + Bu (t) + βd(t)
y(t) = Cx(t)(3.17)
con dimensiones n, m, s y p para los estados x(t), entradas u(t), salidas y(t) y disturbiosd(t), respectivamente. Siendo un sistema SISO, donde A = (δi,j−1) (i y j pueden tomarvalores de 1 a n y δ puede comenzar de 0 o 1). Las matrices β y C se definen comoβT =
[0 0 . . . 1
]y C =
[1 0 0 . . .
]. La estructura del observador proporcional-
integral se da por [Bahram y Hossein, 2003]:
˙x(t) = Ax(t) + Bu (t) + Kp (y − Cx) + βd(t)
˙d(t) = KI (y − Cx)
(3.18)
donde Kp y KI son ganancias proporcional e integral, respectivamente.

3.4. OBSERVADOR PROPORCIONAL-INTEGRAL 49
El observador proporcional-integral proporcional la flexibilidad de la seleccion de laganancia apropiada para alcanzar la estimacion de las salidas derivadas y del disturbio.Para el diseno del observador proporcional-integral, se eligen los polos deseados para dichoobservador, tomando en cuenta que la dinamica del observador esta dada por Az = Ax −KxCx, donde
Ax =
[A β0 0
], Bx =
[B
0
], Cx =
[C 0
], Kx =
[KP
KI
]
Se aprecia que Ax y Cx mantienen la misma estructura, como en las matrices origi-nales A y C y uno puede aplicar la asignacion de eigenvalores como se desea para obtenerKx, el cual contiene a KP y KI .
En forma condensada, el observador proporcional-integral se expresa, como:
˙z(t) = Axx(t) + Bxx(t) + Kx(y(t)− Cxz(t)) (3.19)
siendo z(t) =[
xT (t) dT (t)], donde x(t) son los estados estimados y d(t) el disturbio
estimado del sistema.
Para el caso de sistemas no lineales se realiza una extension de la teorıa anteriormentedesarrollada para sistemas lineales. Ademas, considerando el observador desarrollado en[Bahram y Hossein, 2003] para una clase de sistemas no lineales, se propone un observadorproporcional-integral capaz de estimar estados y parametros para una clase de sistemasno lineales de la forma de la Ec. (3.20):
x(t) = F (x(t), u(t)) + β(x(t), u(t))θ(t)
y(t) = Cx(t)(3.20)
donde F (x(t), u(t)) es una funcion global Lipschitz con respecto a x(t) ∈ Rn, y localmenteuniforme con respecto a u ∈ Rm, u son las entradas, x estados del sistema y θ ∈ Rp es unparametro del sistema, teniendo como ecuacion diferencial a θ = 0. Por ultimo y(t) ∈ Rs
son las salidas del sistema. Cabe mencionar que esta clase de sistemas no lineales sonMIMO.
Un observador proporcional-integral para la clase de sistemas no lineales representado

50 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
en la Ec. (3.20) es:
˙x(t) = F (x(t), u(t)) + β(x(t), u(t))θ(t) + KP (y(t)− Cx(t))
˙θ(t) = KI(y(t)− Cx(t))
y(t) = Cx(t)
(3.21)
Agrupando:
˙z(t) = Axz(t) + F ∗(x(t), u(t)) + Kx(y(t)− Cxz(t))
y(t) = Cxz(t)(3.22)
donde las matrices Ax, Cx, y Kx se definen como:
Ax =
[0 β(x(t), u(t))0 0
], Cx =
[C 0
]=
[In 0
]y Kx =
[KP
KI
]
y F ∗ =
[F (x(t), u(t))
0
], donde z(t) =
[x(t)
θ(t)
]se definen como vectores aumentados por
la incorporacion de θ como otro estado. Cabe aclarar que este observador es de ordencompleto por lo que la matriz C es una matriz identidad de n×n estados de x. La matrizde ganancias Kx, esta integrada por la ganancia proporcional KP ∈ Rn×s y la gananciaintegral KI ∈ Rp×s. La ganancia Kx se puede obtener de varias maneras.
i) Una manera de calcular Kx puede ser a traves de la asignacion de los polos deseadosP (s). Donde se debe encontrar una matrix Kx tal que la matrix Az = Ax −KxCx
del observador proporcional-integral dado por la Ec. (3.22) tiene el polinomio carac-terıstico P (s).
ii) Otro metodo requiere la solucion de la siguiente ecuacion de Lyapunov :
ρPρ + ATx Pρ + PρAx − CT
x Cx = 0 (3.23)
con ρ > 0 suficientemente grande, que es el parametro de sintonizacion.
3.5. OBSERVADOR DE KALMAN EXTENDIDO CON ESTADOS AUMENTADOS 51
La solucion de la Ec. (3.23) esta dada por:
Pρ =
1ρIn − 1
ρ2 Inβ(x(t), u(t))
− 1ρ2 β
T (x(t), u(t))In2ρ3 β
T (x(t), u(t))β(x(t), u(t))
(3.24)
siendo In una matriz identidad de n× n.
La matriz de ganancias Kx se calcula de la siguiente forma:
Kx = P−1ρ CT
x (3.25)
3.5 Observador de Kalman extendido con estados au-
mentados
Sin duda, una de las tecnicas mas populares de estimacion son los observadores deKalman extendido. Se han reportado numeroso trabajos con este tipo de observadores.El mecanismo de convergencia en el caso de sistemas lineales es bien conocido, el analisisde estabilidad esta lejos de ser resuelto cuando se consideran sistemas no lineales. En eltrabajo de [Boutayeb y Aubry, 1999] se explica que debe considerarse la influencia de lasmatrices Rk y Qk, varianza y covarianza respectivamente, en el mecanismo de convergenciade los observadores de Kalman extendido, dicha influencia no ha sido considerada. Cuandoestas matrices se eligen arbitrariamente, en general Rk = ηIp y Qk = σIn con 0 ≥ η yσ ≤ 1, el observador de Kalman extendido no converge si no esta inicializado estrictamentecercano a la situacion actual de los estados del sistema.
En [Boutayeb y Aubry, 1999] se considera el papel que juegan estas matrices. Latecnica que proponen los autores, consiste en introducir las matrices diagonales descono-cidas para cuantificar los errores de linealizacion. Con la ayuda del enfoque de Lyapunov,se demuestra el analisis de estabilidad del observador de Kalman extendido, esto se realizaal resolver una matriz de desigualdad lineal (LMI), donde Rk y Qk desempenan un papelcentral para mejorar la convergencia del observador de Kalman extendido. El diseno deestas matrices se da afın de que aseguren un buen seguimiento (bajo la condicion del rangode observabilidad) del observador, incluso si el vector de error de los estados pertenece aun conjunto compacto convexo muy grande.
Los observadores adaptables aplicando la tecnica de observador de Kalman extendidose han propuesto en [Bohn, 2000; Doblinger, 1998; Wiklander, 2003]. Donde se abordan

52 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
dos tecnicas para la estimacion de parametros, las cuales son: observador de Kalman ex-tendido con estados aumentados y observador de Kalman extendido adaptable. La segundatecnica presenta un algoritmo muy complejo, pero asegura un mejor desempeno en la es-timacion con respecto a la primera.
La estimacion de parametros del sistema utilizando un observador de Kalman ex-tendido con estados aumentados tiene un desempeno aceptable, donde se considera unsistema no lineal en tiempo discreto de la forma:
zk+1 = f(zk, uk) = fuk(zk)
yk = Czk
(3.26)
zk =[
xk θk
]T ∈ Rn, siendo xk ∈ Rm son los estados del sistema y θk ∈ Rp son losparametros del mismo, teniendo como ecuacion diferencial θk+1 = 0; uk ∈ Rr y yk ∈ Rs
denotan los estados, entradas y vectores de salida en un instante k, respectivamente.
El observador de Kalman extendido con estados aumentados para un sistema dadopor la Ec. (3.26) se da por:
zk+1 = fuk(zk) + Kk+1ek+1 (3.27)
donde Kk+1 ∈ Rn×s es la matriz de ganancias y ek+1 es el vector de error de estimacion.Para el calculo de esta matriz de ganancias se desarrolla una serie de pasos que se describena continuacion.
Primero se calcula la matriz de propagacion de la covarianza de tk ≤ t ≤ tk+1:
Pk+1|k = FkPkFTk + Qk (3.28)
siendo Fk la matriz de linealizacion del sistema no lineal en el punto de equilibrio zk, lacual se obtiene a traves del Jacobiano de la funcion fuk(zk) (vease la Ec. (3.29)). Qk es lamatriz de covarianza, propuesta en la Ec. (3.30).
Fk =∂fuk(zk)
∂xk
∣∣∣∣zk=zk
(3.29)

3.5. OBSERVADOR DE KALMAN EXTENDIDO CON ESTADOS AUMENTADOS 53
Qk =
(Qx 00 Qp
)(3.30)
donde Qk esta conformada por Qx y Qp, las cuales son las covarianzas de los estados xk
y del estado aumentado (parametro a estimar), respectivamente. Estas covarianzas estandadas por:
Qx = γeTk ekIm + δIm (3.31)
Qp = γpθkδp (3.32)
Im es una matriz identidad de orden m que es el numero de estados xk.
Los parametros γ y γp tienen que ser elegidos lo suficientemente grandes y deben serpositivos, en particular para malas condiciones iniciales (cuando no se inicializa cercanoa los estados xk), mientras que δ y δp son dos escalares positivos los cuales deben serpequenos.
Posteriormente se realiza el calculo de la aproximacion del error de prediccion de lamatriz de covarianza, la cual se expresa por:
Ak+1 = Hk+1Pk+1|kHTk+1
+ Rk+1 (3.33)
donde Hk+1 es la matriz C, y la matriz Rk+1 es la varianza y se propone:
Rk+1 = λHk+1Pk+1|kHTk+1 + δIs (3.34)
siendo λ un escalar positivo y la matriz Is una matriz identidad de dimension s, que es elnumero de salidas del sistema.
Despues de todo esto, se calcula la matriz de ganancias Kk que se expresa por:
Kk+1 = Pk+1|kHTk+1A
−1k+1 (3.35)
Por ultimo se realiza la actualizacion de la matriz de covarianza:
54 CAPITULO 3. DISENO DE OBSERVADORES ADAPTABLES
Pk+1 = (In −Kk+1Hk+1) Pk+1|k (3.36)
3.6 Conclusiones
En este capıtulo se realizo un estudio sobre las tecnicas de estimacion de estadosy parametros basadas en observador de forma adaptable y observador de gran ganancia.Ademas se propuso el observador proporcional-integral para una clase de sistemas no li-neales mas general, que los propuestos en la literatura, este es capaz de estimar estados;por ultimo se realiza una adaptacion a la teorıa del observador de Kalman extendido conestados-aumentados al considerar un nuevo calculo de las matrices de covarianza y vari-anza.
Al estudiar el diseno de estos observadores se concluye que el diseno que presentauna mayor complejidad es el diseno del observador de Kalman extendido con estados-aumentados, ya que este tipo de observador requiere para su diseno la linealizacion delsistema y un numero mayor de pasos para el calculo de la matriz de ganancia, con respectoa los otros observadores. Una ventaja del diseno de este observador es que se puede realizarpara cualquier clase de sistemas no lineales.
El diseno del observador de forma adaptable presenta mayor sencillez comparadocon los disenos de los otros observadores, ya que no requiere un calculo de las ganancias,debido a que estas son constantes. Aunque este observador solo se emplea para una clasede sistemas no lineales.

Capıtulo 4
Validacion de los observadores adaptables en
procesos de intercambio de calor
El objetivo de este capıtulo es presentar el desarrollo y validacion de los observadoresadaptables aplicados a un intercambiador de calor tipo helicoidal enchaquetado. Dichosobservadores estiman las salidas y un parametro interno del intercambiador. El parametrointerno a estimar es el coeficiente de transferencia de calor U , ya que este parametro sirvecomo indicador de la presencia del fouling en las paredes del intercambiador de calor, loque ocasiona una disminucion de la eficiencia del equipo.
Para validar dichos observadores se realizaron pruebas, considerando diferentes valo-res en las entradas del proceso. En la Seccion 4.1 se presenta tanto el desarrollo, como losresultados del observador de forma adaptable aplicado al intercambiador de calor. En laSeccion 4.2 se muestra el desarrollo y resultados del observador de gran ganancia. En laSeccion 4.3 se presenta el desarrollo y resultados del observador proporcional-integral. Enla Seccion 4.4 se presentan los mismos puntos que en las secciones anteriores, pero ahorapara un observador de Kalman extendido con estados-aumentados. En la Seccion 4.5 sepresenta una comparacion de los observadores desarrollados. Finalmente en la Seccion 4.6se presentan algunas conclusiones.
4.1 Observador de forma adaptable
Para desarrollar este observador es necesario expresar el modelo matematico delintercambiador de calor tipo helicoidal enchaquetado (vease la Seccion 2.2) dado en la Ec.
55

56 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
(3.7), el cual se muestra a continuacion:
dTo(t)
dtdTjo(t)
dt
=
[Cphv (Ti(t)− Tbc1)− Cph` (To(t)− Tbc1)]Vr(t)
MCph`
Fj(t)
Vc
(Tji(t)− Tjo(t)) +Vr(t)
Vc
∆Hvapc1
︸ ︷︷ ︸α(y(t),z(t),u(t))
+
−A (To(t)− Tjo(t))
MCph`
A (To(t)− Tjo(t))
VcCpjρj
︸ ︷︷ ︸β(y(t),z(t),u(t))
U(t)
(4.1)
Por lo que un observador de forma adaptable de la forma de la Ec. (3.11) para elmodelo matematico de la Ec. (4.1), se da por:
dTo
dt=
[Cphv (Ti − Tbc1)− Cph`
(To − Tbc1
)] Vr
MCph`
−A
(To − Tjo
)
MCph`
U − ky
(To − To
)
dTjo
dt=
Fj
Vc
(Tji − Tjo
)+
Vr
Vc
∆Hvapc1 +
A(To − Tjo
)
VcCpjρj
U − ky
(Tjo − Tjo
)
dU
dt= −kθ
[−
A(To − Tjo
)
MCph`
A(To − Tjo
)
VcCpjρj
][To − To
Tjo − Tjo
]
(4.2)
En estas ecuaciones del observador se da la estimacion tanto para las salidas comopara el parametro interno. Siendo ky y kθ los parametros de sintonizacion del observador.
4.1.1 Validacion del observador de forma adaptable
La validacion del observador se realizo en base a los datos obtenidos de la plantapiloto de la columna de destilacion binaria. Para ello se utilizaron los datos obtenidos enlos experimentos descritos en el Capıtulo 2, los cuales sirvieron para validar el modelo delintercambiador de calor. Cabe mencionar que en este capıtulo solo se presentan los dosexperimentos mas significativos para validar los observadores expuesto en la tesis. Estosexperimentos son el uno y tres, segun lo descrito en el Capıtulo 2.
Las condiciones iniciales de los estados y el parametro del observador fueron:

4.1. OBSERVADOR DE FORMA ADAPTABLE 57
Tabla 4.1: Condiciones iniciales del observador
Estados Condicion
Inicial
To(0) 61 C
Tjo(0) 31 C
U(0) 200 J/(min m2 C)
Experimento 1. Validacion del observador de forma adaptable dado en laEc. (4.2) disenado para el condensador helicoidal enchaquetado, considerandocambios en el flujo de enfriamiento Fj y en la valvula de recirculacion R:
El objetivo de este experimento es apreciar los tiempos de convergencia de las es-timaciones de los estados y el parametro interno, obtenidas por el observador de formaadaptable. Ası como el comportamiento de la estimacion del coeficiente de transferenciade calor U .
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 1, desarrollado en la Seccion 2.2, los cuales resultaronde las senales de excitacion de la Tabla 2.1. Ademas se realiza una cuantificacion del errorde estimacion de las salidas, dicho error esta dado por: e = ||x− x||.
Las ganancias del observador son: ky = 10 y kθ = 1000, con dichas ganancias seobtiene el mejor desempeno del observador ante los datos experimentales.
En la Fig. 4.1 se muestran los datos de las temperaturas de salida del intercambiadorde calor en el experimento y sus estimaciones (estados del sistema), por medio del obser-vador de forma adaptable. Se observa que la estimacion de las salidas es precisa y tiene unbuen tiempo de convergencia en ambos estados. En la salida del lıquido de enfriamiento seaprecia que el tiempo de convergencia es aproximadamente 1 minuto, la salida del lıquidocondensado presenta un tiempo de estimacion de aproximadamente 2.5 minutos. Tambiense aprecia que el observador tiene una mejor estimacion en la salida del lıquido condensado.
Por otro lado, en la Fig. 4.2 se puede observar la estimacion del parametro interno(U) en el experimento, dicha estimacion converge en 122 J/(minm2C), este valor es cer-cano al considerado en la validacion del modelo, el cual es de 120 J/(minm2C). Ademas,
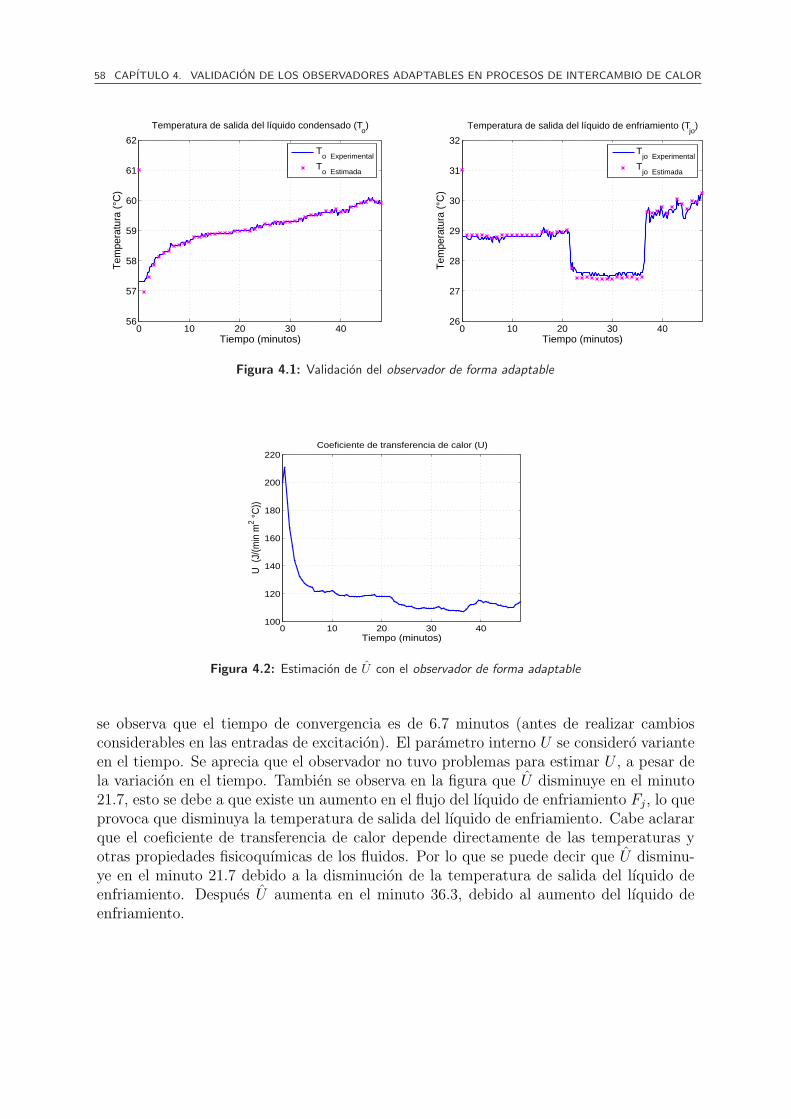
58 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
0 10 20 30 4056
57
58
59
60
61
62
Tiempo (minutos)
Tem
pera
tura
(°C
)Temperatura de salida del líquido condensado (T
o)
To Experimental
To Estimada
0 10 20 30 4026
27
28
29
30
31
32
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Experimental
Tjo Estimada
Figura 4.1: Validacion del observador de forma adaptable
0 10 20 30 40100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Figura 4.2: Estimacion de U con el observador de forma adaptable
se observa que el tiempo de convergencia es de 6.7 minutos (antes de realizar cambiosconsiderables en las entradas de excitacion). El parametro interno U se considero varianteen el tiempo. Se aprecia que el observador no tuvo problemas para estimar U , a pesar dela variacion en el tiempo. Tambien se observa en la figura que U disminuye en el minuto21.7, esto se debe a que existe un aumento en el flujo del lıquido de enfriamiento Fj, lo queprovoca que disminuya la temperatura de salida del lıquido de enfriamiento. Cabe aclararque el coeficiente de transferencia de calor depende directamente de las temperaturas yotras propiedades fisicoquımicas de los fluidos. Por lo que se puede decir que U disminu-ye en el minuto 21.7 debido a la disminucion de la temperatura de salida del lıquido deenfriamiento. Despues U aumenta en el minuto 36.3, debido al aumento del lıquido deenfriamiento.

4.1. OBSERVADOR DE FORMA ADAPTABLE 59
0 10 20 30 400
1
2
3
4
5
Tiempo (minutos)Er
ror d
e Es
timac
ión (°
C)
Figura 4.3: Error de estimacion del observador de forma adaptable
Por ultimo, en la Fig. 4.3 se aprecia el error de estimacion del observador en lastemperaturas de salida, el cual tiende rapidamente a disminuir. Dicho error es cercano acero a partir del minuto 1. Posteriormente, el error aumenta 0.1C en el minuto 21.7, estose debe al aumento del flujo de enfriamiento Fv. Al paso del tiempo dicho error empiezaa disminuir.
Experimento 2. Validacion del observador de forma adaptable dado en laEc. (4.2) disenado para el condensador helicoidal enchaquetado, considerandomultiples cambios en las entradas
El objetivo de este experimento es apreciar las estimaciones de los estados y elparametro interno, realizadas por el observador de forma adaptable. Ası como tambien lavariacion de la estimacion del coeficiente de transferencia de calor U , debidas a multiplescambios en las entradas del sistema.
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 3, desarrollado en la Seccion 2.2, los cuales resul-taron de las senales de excitacion de la Tabla 2.3. Igual que en los casos anteriores, serealiza una cuantificacion del error de estimacion de las salidas, dicho error esta dado por:e = ||x− x||. Las ganancias del observador son ky = 10 y Kθ = 1000.
Se puede apreciar en la Fig. 4.4 que el observador de forma adaptable logra estimarlas salidas en poco tiempo y con buen desempeno. En la salida del lıquido condensado, laestimacion se alcanza en 4 minutos aproximadamente y el observador logra tener un buendesempeno. En el caso de la temperatura de salida del lıquido de enfriamiento, el tiempode estimacion es de 1 minuto aproximadamente, aunque existe un error 0.13C partir delminuto 52.6, donde se presenta un cambio en el flujo del agua de enfriamiento.
En la Fig. 4.5 se aprecia la estimacion que logra el observador en este experimento.

60 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
0 10 20 30 40 50 60 7056
58
60
62
64
66
Tiempo (minutos)
Tem
pera
tura
(°C
)Temperatura de salida del líquido condensado (T
o)
To Experimental
To Estimada
0 10 20 30 40 50 60 7028
29
30
31
32
33
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Experimental
Tjo Estimada
Figura 4.4: Validacion del observador de forma adaptable
El tiempo de convergencia para U es de 8 minutos, con un valor de 122 J/(min m2 C),el cual es un valor cercano al utilizado en la validacion del modelo. En el caso de esteexperimento, se puede apreciar que el parametro varıa significativamente debido a la granvariacion en las temperaturas de salida, provocadas por los multiples cambios en las senalesde entrada al sistema (vease la Tabla 2.3).
0 10 20 30 40 50 60 7080
100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Figura 4.5: Estimacion de U con el observador de forma adaptable
Tambien se observa en la Fig. 4.5 que a partir del minuto 12 hasta el minuto 24disminuye el parametro, debido al aumento en la temperatura de salida del lıquido conden-sado y posteriormente aumenta hasta el minuto 38, debido a que en la salida del lıquidocondensado empieza a disminuir la temperatura. Despues el parametro disminuye, de-bido a que la valvula de reflujo se abre totalmente y entonces la temperatura empieza a

4.2. OBSERVADOR DE GRAN GANANCIA 61
aumentar hasta alcanzar los 62.8C en la salida del lıquido condensado, que es la tem-peratura maxima que se logro en todos los experimentos, y es menor a la temperatura deebullicion del componente mas ligero de la mezcla, que en este caso es el metanol. Conlo que se confirma que el condensador es de tipo total, aunque el flujo de vapor disminu-ye, el condensador sigue condensando. Posteriormente se aumenta el flujo del lıquido deenfriamiento (minuto 52.6) y disminuye su temperatura, esto ocasiona que U disminuya.Por ultimo se realiza un cambio en la apertura de la valvula de reflujo (minuto 57.4) y Uempieza a aumentar hasta estabilizarse.
0 10 20 30 40 50 60 700
1
2
3
4
5
Tiempo (minutos)
Err
or d
e E
stim
ació
n (°
C)
Figura 4.6: Error de estimacion del observador de forma adaptable
En la Fig. 4.6 se observa que el error de estimacion tiende a cero rapidamente, en1 minuto. El error no supera los 0.15C, a pesar que en este experimento se realizaronmuchos cambios en las entradas del proceso y esto provoco muchas variaciones en lastemperaturas de salida. El error de 0.15C se debio a el cambio del flujo del agua deenfriamiento en el minuto 52.6, esto tambien se aprecia en la Fig. 4.4 en la estimacion dela temperatura de salida del agua de enfriamiento.
4.2 Observador de gran ganancia
Para disenar un observador de gran ganancia para el intercambiador de calor heli-coidal enchaquetado de la columna de destilacion binaria, es necesario acomodar el modelo
expresado en las Ecs. (2.17) y (2.18) de la forma (3.13), donde z(t) =[
z1 z2
]T ∈ R2n,siendo n =2 debido a las dos salidas del sistema To y Tjo, por lo que el observador estimara

62 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
dos veces el parametro U , estos se nombran como U1 y U2. Esto es:
dTo(t)
dtdTjo(t)
dtdU1(t)
dtdU2(t)
dt
︸ ︷︷ ︸z(t)
=
0 0 −A (To(t)− Tjo(t))
MCph`
0
0 0 0A (To(t)− Tjo(t))
VcCpjρj
0 0 0 00 0 0 0
︸ ︷︷ ︸F (z1(t),s(t))
To(t)Tjo(t)U1(t)U2(t)
+
[Cphv (Ti(t)− Tbc1)− Cph` (To(t)− Tbc1)]Vr(t)
MCph`
Fj(t)
Vc
(Tji(t)− Tjo(t)) +Vr(t)
Vc
∆Hvapc1
00
︸ ︷︷ ︸B(u(t),z1(t),s(t))
+
00εε
(4.3)
donde:
F1 (y (t) , s (t)) =
−A (To(t)− Tjo(t))
MCph`
0
0A (To(t)− Tjo(t))
VcCpjρj
(4.4)
siendo f(y(t), s(t)) = 1 y s(t) = 0.
Un observador de gran ganancia de la forma de la Ec. (3.14) para el modelo no lineal

4.2. OBSERVADOR DE GRAN GANANCIA 63
expresado en al Ec. (4.3) esta dado por:
dTo(t)
dtdTjo(t)
dtdU1(t)
dtdU2(t)
dt
=
0 0 −A
(To(t)− Tjo(t)
)
MCph`
0
0 0 0A
(To(t)− Tjo(t)
)
VcCpjρj
0 0 0 00 0 0 0
To(t)
Tjo(t)
U1(t)
U2(t)
+
[Cphv (Ti(t)− Tbc1)− Cph`
(To(t)− Tbc1
)] Vr(t)
MCph`
Fj(t)
Vc
(Tji(t)− Tjo(t)
)+
Vr(t)
Vc
∆Hvapc1
00
+
2φ
[1 00 1
]
φ2
− MCph`
A(To(t)− Tjo(t)
) 0
0VcCpjρj
A(To(t)− Tjo(t)
)
[To(t)− To(t)
Tjo(t)− Tjo(t)
]
(4.5)
φ es el parametro de sintonizacion del observador de gran ganancia.
4.2.1 Validacion del observador de gran ganancia
Para la validacion de este observador tambien se utilizaron los datos experimentalescon los cuales se valido el modelo del intercambiador de calor. Se presentan los resultadosobtenidos del observador para el experimento 1 y 3, desarrollados en la Seccion 2.2. Lascondiciones iniciales del observador son las presentadas en la Tabla 4.1.
Experimento 1. Validacion del observador de gran ganancia dado en laEc. (4.5) disenado para el condensador helicoidal enchaquetado, considerandocambios en el flujo de enfriamiento Fj y en la valvula de recirculacion R:
El objetivo de este experimento es apreciar el desempeno del observador de granganancia. Ademas, de observar los tiempos de convergencia de las estimaciones de los es-

64 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
tados y el parametro interno. Ası como el comportamiento de la estimacion del coeficientede transferencia de calor U .
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 1, desarrollado en la Seccion 2.2, los cuales resultaronde las senales de excitacion de la Tabla 2.1. Ademas se realiza una cuantificacion del errorde estimacion de las salidas, dicho error esta dado por: e = ||x− x||.
El parametro de sintonizacion tiene un valor φ = 2.5, con el cual se lograron resul-tados satisfactorios.
0 10 20 30 4056
57
58
59
60
61
62
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido condensado (To)
To Experimental
To Estimada
0 10 20 30 4026
27
28
29
30
31
32
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Experimental
Tjo Estimada
Figura 4.7: Validacion del observador de gran ganancia
En la Fig. 4.7 se muestran los datos de las temperaturas de salida del experimentoy sus estimaciones, con el observador de gran ganancia. Se puede observar un tiempo deconvergencia rapido en ambos estados del sistema. En el caso de la temperatura de salidadel lıquido condensado, el tiempo de convergencia es de 2.5 minutos aproximadamente yen el caso de la temperatura de salida del lıquido de enfriamiento, es de 1 minuto. Ambasestimaciones logran aproximar las temperaturas de salida en todo el intervalo de tiempo,a pesar de las variaciones en el flujo del lıquido de enfriamiento.
Por oro lado, en la Fig. 4.8 se muestra la estimacion obtenida de U en el experimento1, en esta se aprecia que el tiempo de convergencia es de 6.5 minutos aproximadamente yconverge en un valor de 122 J/(min m2 C), dicho valor es cercano al utilizado en la vali-dacion del modelo. Tambien en este observador se considero el coeficiente de transferenciade calor variante en el tiempo, lo cual no resulto ser un problema para lograr una buena

4.2. OBSERVADOR DE GRAN GANANCIA 65
0 10 20 30 40100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Figura 4.8: Estimacion de U con el observador de gran ganancia
estimacion. Se aprecia que en el minuto 21.7, hay una disminucion de U , que es provocadapor la disminucion de la temperatura de salida del lıquido de enfriamiento; posteriormentehay un aumento en dicha temperatura en el minuto 36.3, lo que provoca un aumento enU .
0 10 20 30 400
1
2
3
4
5
Tiempo (minutos)
Err
or d
e E
stim
ació
n (°
C)
Figura 4.9: Error de estimacion del observador de gran ganancia
En la Fig. 4.9 se presenta el error de estimacion de las temperaturas de salida delintercambiador de calor. En esta se observa que el error rapidamente disminuye a unvalor cercano a 0, esto lo logra en 2.5 minutos aproximadamente. Existen dos aumentosen el error, que son provocados cuando se presentan los cambios en el flujo del lıquido deenfriamiento, pero aun ası vuelve a converger a cero rapidamente.
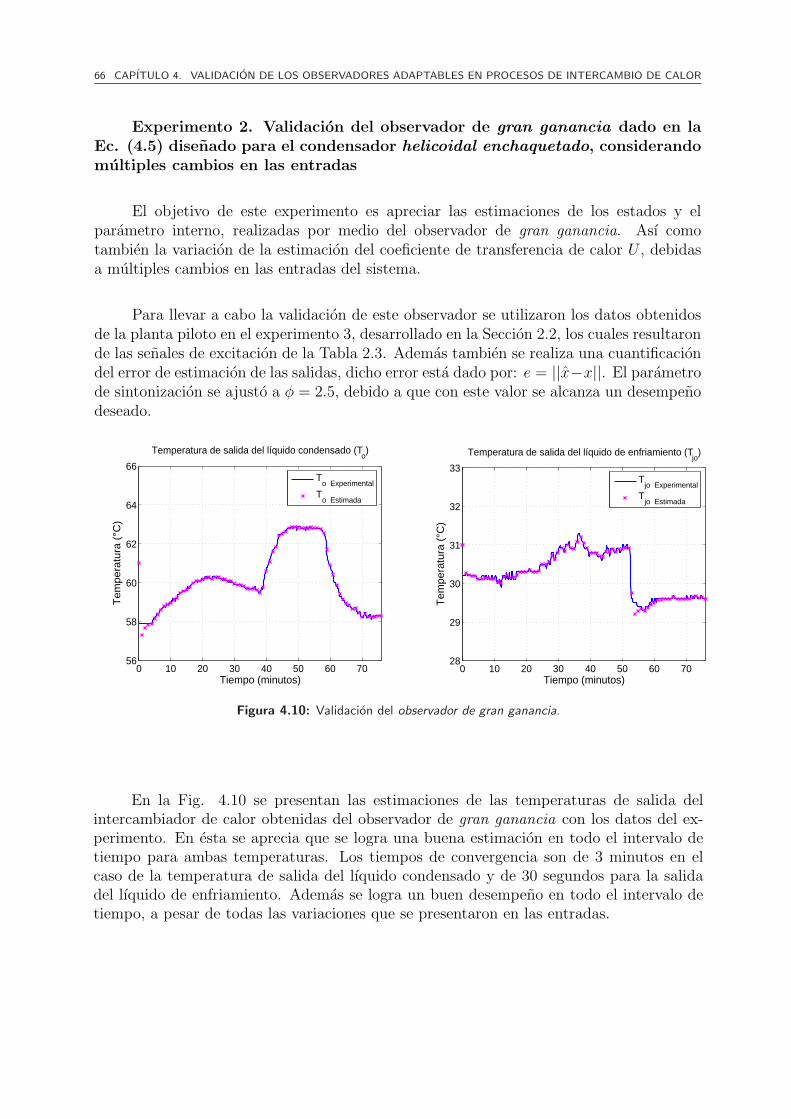
66 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
Experimento 2. Validacion del observador de gran ganancia dado en laEc. (4.5) disenado para el condensador helicoidal enchaquetado, considerandomultiples cambios en las entradas
El objetivo de este experimento es apreciar las estimaciones de los estados y elparametro interno, realizadas por medio del observador de gran ganancia. Ası comotambien la variacion de la estimacion del coeficiente de transferencia de calor U , debidasa multiples cambios en las entradas del sistema.
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 3, desarrollado en la Seccion 2.2, los cuales resultaronde las senales de excitacion de la Tabla 2.3. Ademas tambien se realiza una cuantificaciondel error de estimacion de las salidas, dicho error esta dado por: e = ||x−x||. El parametrode sintonizacion se ajusto a φ = 2.5, debido a que con este valor se alcanza un desempenodeseado.
0 10 20 30 40 50 60 7056
58
60
62
64
66
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido condensado (To)
To Experimental
To Estimada
0 10 20 30 40 50 60 7028
29
30
31
32
33
Tiempo (minutos)
Tem
pera
tura
(°C
)Temperatura de salida del líquido de enfriamiento (T
jo)
Tjo Experimental
Tjo Estimada
Figura 4.10: Validacion del observador de gran ganancia.
En la Fig. 4.10 se presentan las estimaciones de las temperaturas de salida delintercambiador de calor obtenidas del observador de gran ganancia con los datos del ex-perimento. En esta se aprecia que se logra una buena estimacion en todo el intervalo detiempo para ambas temperaturas. Los tiempos de convergencia son de 3 minutos en elcaso de la temperatura de salida del lıquido condensado y de 30 segundos para la salidadel lıquido de enfriamiento. Ademas se logra un buen desempeno en todo el intervalo detiempo, a pesar de todas las variaciones que se presentaron en las entradas.

4.2. OBSERVADOR DE GRAN GANANCIA 67
0 10 20 30 40 50 60 7080
100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Figura 4.11: Estimacion de U con el observador de gran ganancia.
Por otro lado, en la Fig. 4.11 se presenta la estimacion de U en el experimento 3. Setiene un tiempo de convergencia de 8.5 minutos aproximadamente, alcanzando un valor de122 J/(min m2 C), cercano al valor con que se valido el modelo. Esta estimacion de Ues similar a la obtenida por el observador de forma adaptable, como se aprecia en la Fig. 4.5.
0 10 20 30 40 50 60 700
1
2
3
4
5
Tiempo (minutos)
Erro
r de
Estim
ació
n (°
C)
Figura 4.12: Error de estimacion del observador de gran ganancia
En la Fig. 4.12 se puede observar el error de estimacion que se tiene en el obser-vador de gran ganancia en el experimento. Se aprecia que tiende rapidamente a cero, en2.5 minutos. El error se mantiene cercano a cero en todo el intervalo de tiempo, exceptocuando existe un cambio en el flujo del lıquido de enfriamiento en el minuto 52.6 y cuandohay un cambio en la valvula de reflujo en el minuto 57, pero en ambos casos el error espequeno y ademas vuelve a tender a cero.

68 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
4.3 Observador proporcional-integral
Para desarrollar el observador proporcional-integral es necesario expresar el modelono lineal del intercambiador de calor tipo helicoidal enchaquetado expresado en las Ecs.(2.17) y (2.18) en un modelo de la forma de la Ec. (3.20), lo cual queda de la siguientemanera:
dTo(t)
dtdTjo(t)
dt
=
[Cphv (Ti(t)− Tbc1)− Cph` (To(t)− Tbc1)]Vr(t)
MCph`
Fj(t)
Vc
(Tji(t)− Tjo(t)) +Vr(t)
Vc
∆Hvapc1
︸ ︷︷ ︸F (x(t),u(t))
+
−A (To(t)− Tjo(t))
MCph`
A (To(t)− Tjo(t))
VcCpjρj
︸ ︷︷ ︸β(x(t),u(t))
U(t)
(4.6)
El modelo no lineal se expresa en la Ec. (4.6), considerando que U es otro estado, sepueden agrupar las matrices Ax y Cx, donde Cx esta conformada de una matriz identidadque representa las temperaturas de salida medibles y otra matriz de orden 2×1 con valoresde cero que representa que U , es un parametro interno del sistema y no es medible.
Ax =
0 0 −A (To(t)− Tjo(t))
MCph`
0 0A (To(t)− Tjo(t))
VcCpjρj
0 0 0
Cx =
[1 0 00 1 0
](4.7)
Se agrupa la parte no lineal del sistema de la Ec. (4.6) y se aumenta otro estado, locual queda expresa como:
F ∗(x(t), u(t)) =
[Cphv (Ti(t)− Tbc1)− Cph` (To(t)− Tbc1)]Vr(t)
MCph`
Fj(t)
Vc
(Tji(t)− Tjo(t)) +Vr(t)
Vc
∆Hvapc1
0
(4.8)
Un observador proporcional-integral de la forma (3.22) para el intercambiador de

4.3. OBSERVADOR PROPORCIONAL-INTEGRAL 69
calor de la columna de destilacion binaria queda expresado como:
dTo(t)
dtdTjo(t)
dtdU(t)
dt
=
0 0 −A
(To(t)− Tjo(t)
)
MCph`
0 0A
(To(t)− Tjo(t)
)
VcCpjρj
0 0 0
To(t)
Tjo(t)
U(t)
+
[Cphv (Ti(t)− Tbc1)− Cph`
(To(t)− Tbc1
)] Vr(t)
MCph`
Fj(t)
Vc
(Tji(t)− Tjo(t)
)+
Vr(t)
Vc
∆Hvapc1
0
+ Kx
[To(t)− To(t)
Tjo(t)− Tjo(t)
]
(4.9)
donde la matriz de ganancias Kx esta compuesta de las ganancias proporcional e integral.La matriz se encuentra al resolver la Ecuacion de Lyapunov expresada por (3.23), lo queda como resultado que Kx se exprese de la siguiente manera:
Kx =
1ρ
0 1ρ2
A(To(t)−Tjo(t))
MCph`
0 1ρ
− 1ρ2
A(To(t)−Tjo(t))
VcCpjρj
1ρ2
A(To(t)−Tjo(t))
MCph`− 1
ρ2
A(To(t)−Tjo(t))
VcCpjρj
2ρ3
((A(To(t)−Tjo(t))
MCph`
)2
+(
A(To(t)−Tjo(t))
VcCpjρj
)2)
−1
CTx
ρ es el parametro de sintonizacion del observador proporciona-integral.
4.3.1 Validacion del observador proporcional-integral
Para la validacion de este observador tambien se utilizaron los mismos datos con quese validaron los anteriores observadores, que fueron los datos de las temperaturas de salidaen el experimento 1 y 3, desarrollados en la Seccion 2.2, con el proposito de compararlos.
Experimento 1. Validacion del observador proporcional-integral dadoen la Ec. (4.9) disenado para el condensador helicoidal enchaquetado, con-siderando cambios en el flujo de enfriamiento Fj y en la valvula de recirculacionR:
El objetivo de este experimento es evaluar el desempeno del observador proporcional-integral, a traves de los tiempos de convergencia de las estimaciones de los estados y el
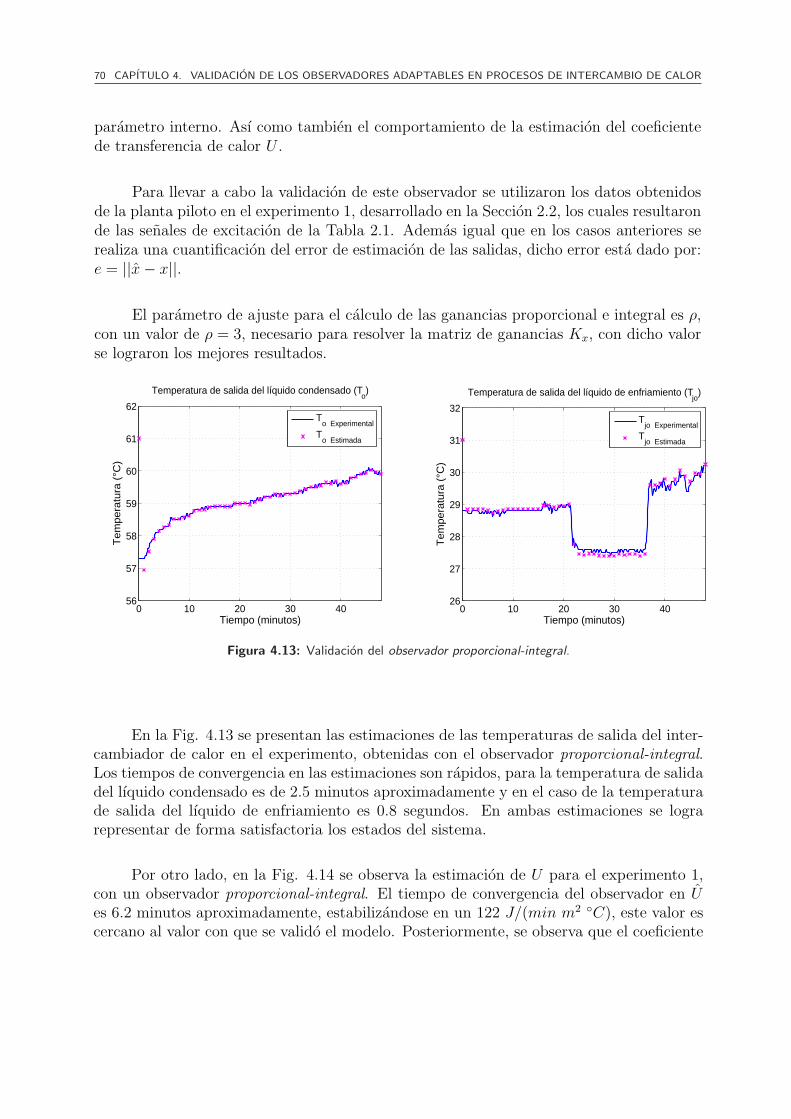
70 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
parametro interno. Ası como tambien el comportamiento de la estimacion del coeficientede transferencia de calor U .
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 1, desarrollado en la Seccion 2.2, los cuales resultaronde las senales de excitacion de la Tabla 2.1. Ademas igual que en los casos anteriores serealiza una cuantificacion del error de estimacion de las salidas, dicho error esta dado por:e = ||x− x||.
El parametro de ajuste para el calculo de las ganancias proporcional e integral es ρ,con un valor de ρ = 3, necesario para resolver la matriz de ganancias Kx, con dicho valorse lograron los mejores resultados.
0 10 20 30 4056
57
58
59
60
61
62
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido condensado (To)
To Experimental
To Estimada
0 10 20 30 4026
27
28
29
30
31
32
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Experimental
Tjo Estimada
Figura 4.13: Validacion del observador proporcional-integral.
En la Fig. 4.13 se presentan las estimaciones de las temperaturas de salida del inter-cambiador de calor en el experimento, obtenidas con el observador proporcional-integral.Los tiempos de convergencia en las estimaciones son rapidos, para la temperatura de salidadel lıquido condensado es de 2.5 minutos aproximadamente y en el caso de la temperaturade salida del lıquido de enfriamiento es 0.8 segundos. En ambas estimaciones se lograrepresentar de forma satisfactoria los estados del sistema.
Por otro lado, en la Fig. 4.14 se observa la estimacion de U para el experimento 1,con un observador proporcional-integral. El tiempo de convergencia del observador en Ues 6.2 minutos aproximadamente, estabilizandose en un 122 J/(min m2 C), este valor escercano al valor con que se valido el modelo. Posteriormente, se observa que el coeficiente
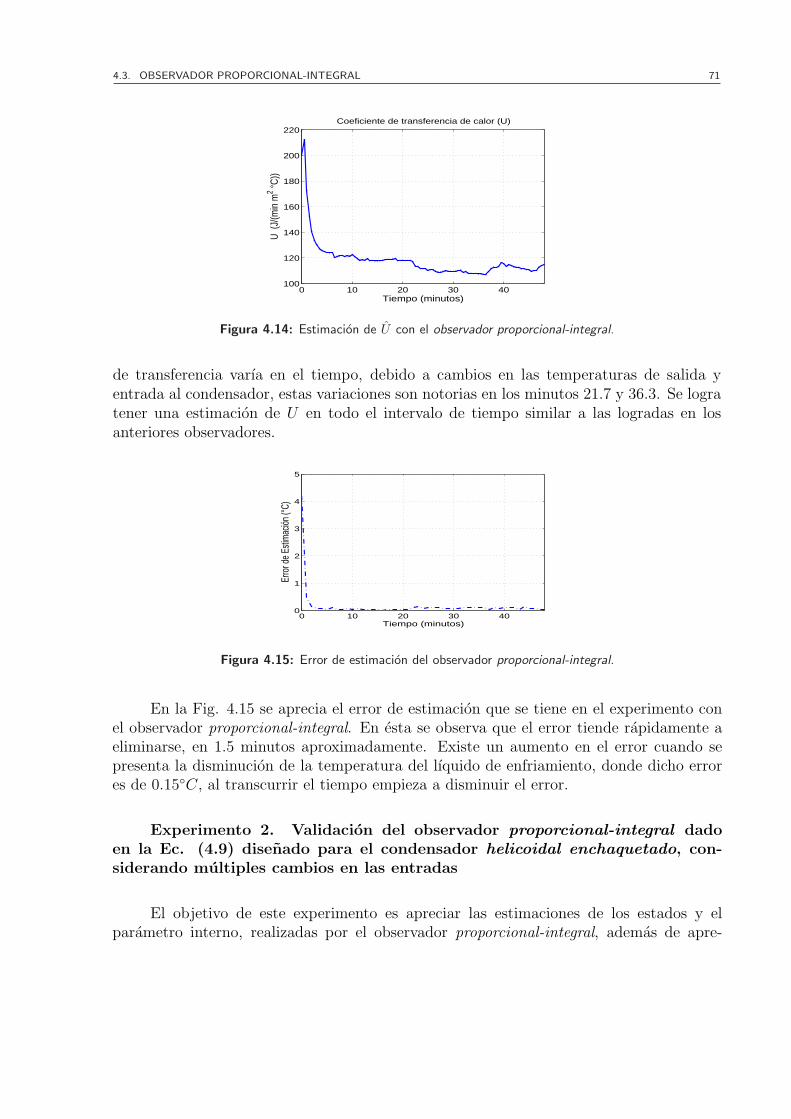
4.3. OBSERVADOR PROPORCIONAL-INTEGRAL 71
0 10 20 30 40100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C))
Coeficiente de transferencia de calor (U)
Figura 4.14: Estimacion de U con el observador proporcional-integral.
de transferencia varıa en el tiempo, debido a cambios en las temperaturas de salida yentrada al condensador, estas variaciones son notorias en los minutos 21.7 y 36.3. Se logratener una estimacion de U en todo el intervalo de tiempo similar a las logradas en losanteriores observadores.
0 10 20 30 400
1
2
3
4
5
Tiempo (minutos)
Erro
r de
Estim
ación
(°C)
Figura 4.15: Error de estimacion del observador proporcional-integral.
En la Fig. 4.15 se aprecia el error de estimacion que se tiene en el experimento conel observador proporcional-integral. En esta se observa que el error tiende rapidamente aeliminarse, en 1.5 minutos aproximadamente. Existe un aumento en el error cuando sepresenta la disminucion de la temperatura del lıquido de enfriamiento, donde dicho errores de 0.15C, al transcurrir el tiempo empieza a disminuir el error.
Experimento 2. Validacion del observador proporcional-integral dadoen la Ec. (4.9) disenado para el condensador helicoidal enchaquetado, con-siderando multiples cambios en las entradas
El objetivo de este experimento es apreciar las estimaciones de los estados y elparametro interno, realizadas por el observador proporcional-integral, ademas de apre-

72 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
ciar los tiempos de convergencias para los estados y el parametro. Ası como tambien lavariacion de la estimacion del coeficiente de transferencia de calor U , debidas a multiplescambios en las entradas del sistema.
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 3, desarrollado en la Seccion 2.2, los cuales resultaronde las senales de excitacion de la Tabla 2.3. Ademas se realiza una cuantificacion del errorde estimacion de las salidas, dicho error esta dado por: e = ||x − x||. El parametro desintonizacion se ajusto a ρ = 3, debido a que con este valor se alcanza un desempenodeseado.
0 10 20 30 40 50 60 7056
58
60
62
64
66
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido condensado (To)
To Experimental
To Estimada
0 10 20 30 40 50 60 7028
29
30
31
32
33
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Experimental
Tjo Estimada
Figura 4.16: Validacion del observador proporcional-integral.
En la Fig. 4.16 se aprecian las estimaciones obtenidas con el observador propor-cional-integral en el experimento. Se observa que las estimaciones son satisfactorias, yaque tienen un tiempo de convergencia rapido, 2 minutos aproximadamente en la tem-peratura de salida del lıquido condensado y 0.8 minutos en la temperatura de salida dellıquido de enfriamiento. Se alcanza un buen desempeno en el caso de la temperatura desalida del lıquido condensado en todo el intervalo de tiempo, en el caso de la temperaturade salida del lıquido de enfriamiento se tiene una buena estimacion hasta el instante de52.6 minutos, ya que en este se presenta un cambio en el flujo del lıquido de enfriamientoy provoca un error en la salida, el cual es 0.15C.
Por otro lado, en la Fig. 4.17 se muestra la estimacion de U en el experimento, pormedio del observador proporcional-integral. Se observa un tiempo de convergencia muyrapido (aproximadamente de 8 minutos) y alcanza un valor de 122 J/(min m2 C), el cual
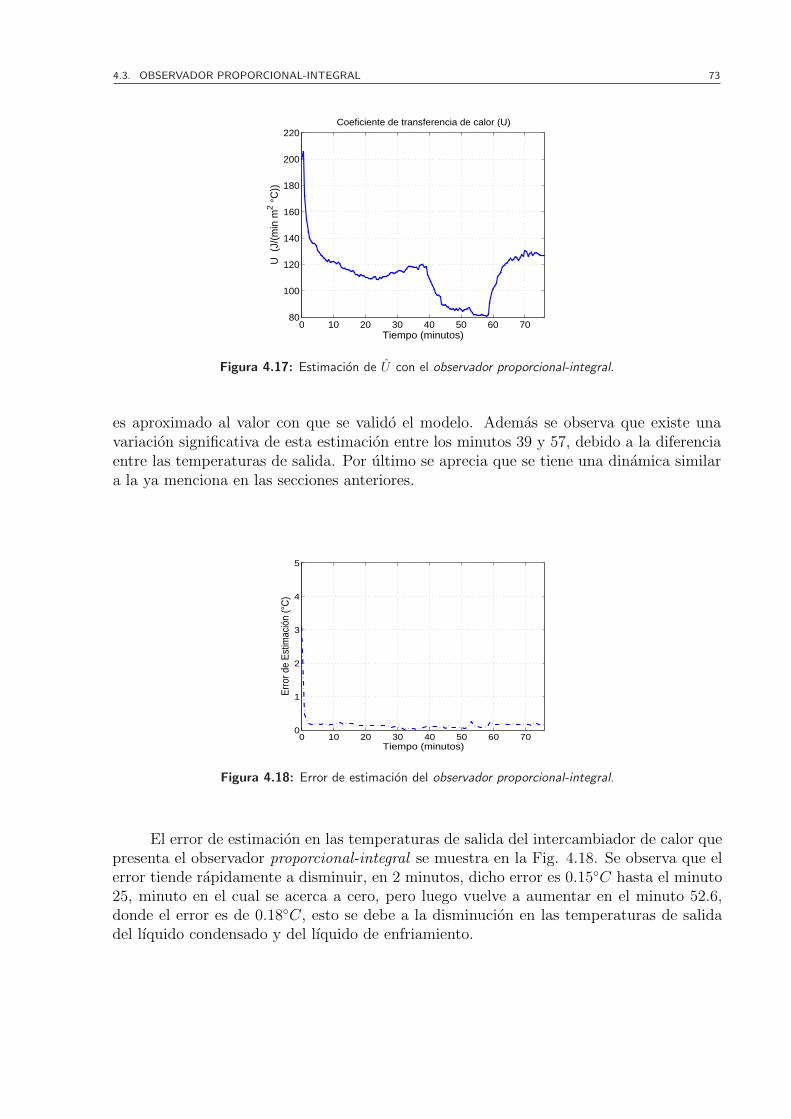
4.3. OBSERVADOR PROPORCIONAL-INTEGRAL 73
0 10 20 30 40 50 60 7080
100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Figura 4.17: Estimacion de U con el observador proporcional-integral.
es aproximado al valor con que se valido el modelo. Ademas se observa que existe unavariacion significativa de esta estimacion entre los minutos 39 y 57, debido a la diferenciaentre las temperaturas de salida. Por ultimo se aprecia que se tiene una dinamica similara la ya menciona en las secciones anteriores.
0 10 20 30 40 50 60 700
1
2
3
4
5
Tiempo (minutos)
Err
or d
e E
stim
ació
n (°
C)
Figura 4.18: Error de estimacion del observador proporcional-integral.
El error de estimacion en las temperaturas de salida del intercambiador de calor quepresenta el observador proporcional-integral se muestra en la Fig. 4.18. Se observa que elerror tiende rapidamente a disminuir, en 2 minutos, dicho error es 0.15C hasta el minuto25, minuto en el cual se acerca a cero, pero luego vuelve a aumentar en el minuto 52.6,donde el error es de 0.18C, esto se debe a la disminucion en las temperaturas de salidadel lıquido condensado y del lıquido de enfriamiento.

74 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
4.4 Observador de Kalman extendido con estados-
aumentados
Para el diseno de un observador de Kalman Extendido no se necesita acomodar elmodelo no lineal del intercambiador de calor de una forma especıfica, como en los obser-vadores anteriores, donde el modelo no lineal se tiene que acomodar en una clase particularde sistemas no lineales. El motivo de lo anterior, es que este observador no lineal es paratoda clase de sistemas no lineales, ya que tiene la forma (3.27).
El observador de Kalman con estados aumentados se nombra ası debido a que elparametro (U) a estimar se agrega en el vector de estado. Primeramente es necesariotener una linealizacion del modelo en un punto de operacion, el cual es zk+1, que sonlas estimaciones de los estados zk+1 = [ To Tjo U ]. La linealizacion del modelo delcondensador helicoidal enchaquetado dado por las Ecs. (2.17) y (2.18), queda expresadade la forma:
Fk =
−Vr(t)
M− AU
MCph`
AU
MCph`
−A
(To(t)− Tjo(t)
)
MCph`
AU
VcCpjρj
−Fj(t)
Vc
− AU
VcCpjρj
A(To(t)− Tjo(t)
)
VcCpjρj
0 0 1
(4.10)
La matriz de salida esta dada de la forma:
Hk+1 =
[1 0 00 1 0
]
Las matrices Fk y Hk+1 son necesarias para el calculo de la matriz de ganancias Kk+1
(Vease Seccion 3.5). Un observador de Kalman extendido con estados-aumentados para el

4.4. OBSERVADOR DE KALMAN EXTENDIDO CON ESTADOS-AUMENTADOS 75
intercambiador de calor en la columna de destilacion esta dado por:
dTo(t)
dtdTjo(t)
dtdU(t)
dt
=
[Cphv (Ti(t)− Tbc1)− Cph`
(To(t)− Tbc1
)]Vr(t)
MCph`−
A(To(t)− Tjo(t)
)U(t)
MCph`
Fj(t)
Vc
(Tji(t)− Tjo(t)
)+
Vr(t)
Vc
∆Hvapc1 +
A(To(t)−Tjo(t))U(t)
VcCpjρj
0
+Kx
[To(t)− To(t)
Tjo(t)− Tjo(t)
]
(4.11)
siendo Kx la matriz de ganancias, la cual se calcula a traves del desarrollo presentado enla Seccion 3.5.
4.4.1 Validacion del observador de Kalman extendido con
estados aumentados
Para validar este observador en el intercambiador de calor de la columna destilacionbinaria, se tomaron los datos experimentales de las pruebas 1 y 3 como en los anterioresobservadores.
Experimento 1. Validacion del observador de Kalman extendido conestados-aumentados dado en la Ec. (4.11) disenado para el condensador he-licoidal enchaquetado, considerando cambios en el flujo de enfriamiento Fj yen la valvula de recirculacion R:
El objetivo de este experimento es evaluar el desempeno del observador de Kalmanextendido con estados-aumentados, a traves de los tiempos de convergencia de las estima-ciones de los estados y el parametro interno. Ası como el comportamiento de la estimaciondel coeficiente de transferencia de calor U .
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 1, desarrollado en la Seccion 2.2, los cuales resultande las senales de excitacion de la Tabla 2.1. Tambien se realiza una cuantificacion del errorde estimacion de las salidas, dicho error esta dado por: e = ||x− x||.
El parametro de ajuste para el calculo de las ganancias proporcional e integral es ρ,

76 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
con un valor de ρ = 3, necesario para resolver la matriz de ganancias Kx, con dicho valorse lograron los mejores resultados.
Los mejores resultados se obtuvieron con los siguientes parametros de sintonizaciondel observador de Kalman extendido con estados-aumentados (vease la Seccion 3.5) : λ =0.001, γ = 10× 1015, γp = 10× 1022, δ = 1× 10−2, δp = 1× 10−4 y la condicion inicial dePk es:
Pk(0) =
10× 102 0 00 10× 102 00 0 10× 105
0 10 20 30 4056
57
58
59
60
61
62
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido condensado (To)
To Experimental
To Estimada
0 10 20 30 4026
27
28
29
30
31
32
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Experimental
Tjo Estimada
Figura 4.19: Validacion del observador de Kalman extendido con estados aumentados.
En la Fig. 4.19 se muestran las estimaciones de las temperaturas de salida en elexperimento, con el observador de Kalman extendido con estados-aumentados. Se apreciaque se obtiene una buena estimacion de las salidas, ya que estas tienen un tiempo deestimacion rapido, aproximadamente de 3 minutos en la temperatura de salida del lıquidocondensado y de 1 minuto en la temperatura de salida del lıquido de enfriamiento. Cabemencionar que esta ultima temperatura presenta un error de 0.22C cuando existe unaumento en el flujo de enfriamiento en el minuto 21.6 hasta el minuto 36.3.
La estimacion de U en este experimento se presenta en la Fig. 4.20, en esta seaprecia la buena estimacion de U , teniendo un tiempo de convergencia de 7 minutosaproximadamente y llegando a un valor de 122 J/(min m2 C), el cual es aproximado alvalor con que se valido el modelo. Es importante mencionar que su desempeno es muysuave, provocado a que elimina el ruido de medicion.
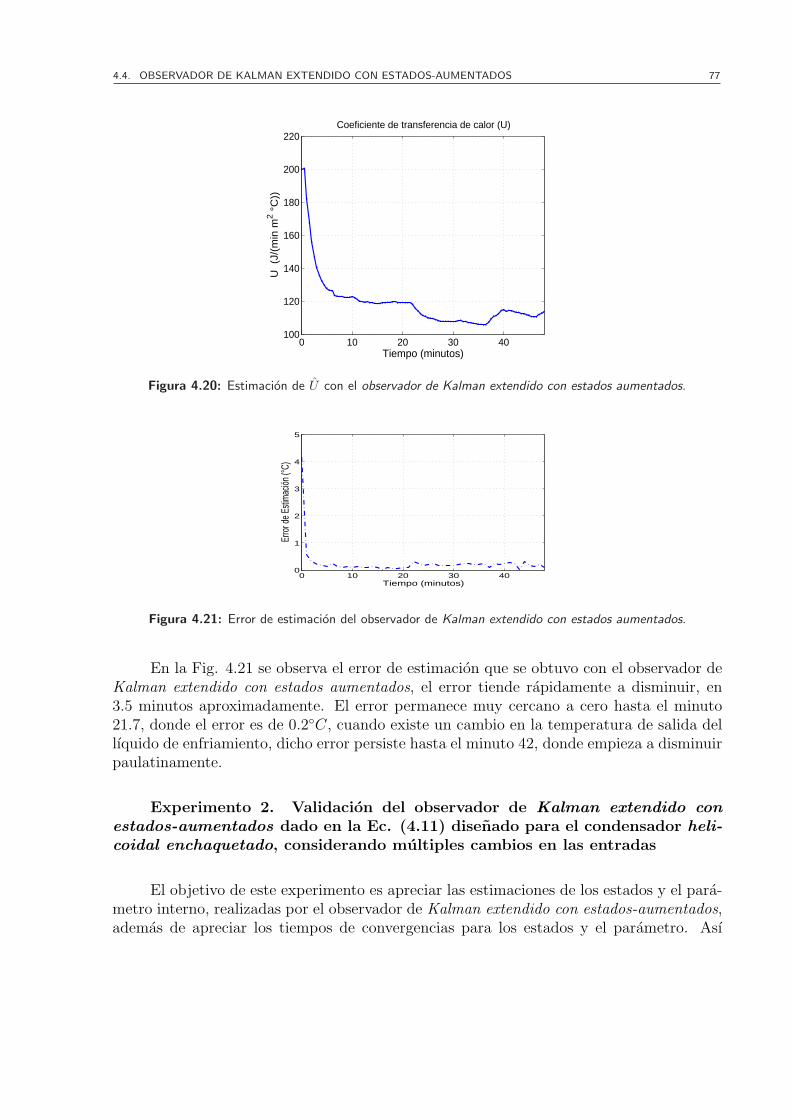
4.4. OBSERVADOR DE KALMAN EXTENDIDO CON ESTADOS-AUMENTADOS 77
0 10 20 30 40100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Figura 4.20: Estimacion de U con el observador de Kalman extendido con estados aumentados.
0 10 20 30 400
1
2
3
4
5
Tiempo (minutos)
Erro
r de
Estim
ación
(°C)
Figura 4.21: Error de estimacion del observador de Kalman extendido con estados aumentados.
En la Fig. 4.21 se observa el error de estimacion que se obtuvo con el observador deKalman extendido con estados aumentados, el error tiende rapidamente a disminuir, en3.5 minutos aproximadamente. El error permanece muy cercano a cero hasta el minuto21.7, donde el error es de 0.2C, cuando existe un cambio en la temperatura de salida dellıquido de enfriamiento, dicho error persiste hasta el minuto 42, donde empieza a disminuirpaulatinamente.
Experimento 2. Validacion del observador de Kalman extendido conestados-aumentados dado en la Ec. (4.11) disenado para el condensador heli-coidal enchaquetado, considerando multiples cambios en las entradas
El objetivo de este experimento es apreciar las estimaciones de los estados y el para-metro interno, realizadas por el observador de Kalman extendido con estados-aumentados,ademas de apreciar los tiempos de convergencias para los estados y el parametro. Ası

78 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
como tambien la variacion de la estimacion del coeficiente de transferencia de calor U ,debidas a multiples cambios en las entradas del sistema.
Para llevar a cabo la validacion de este observador se utilizaron los datos obtenidosde la planta piloto en el experimento 3, desarrollado en la Seccion 2.2, los cuales resultaronde las senales de excitacion de la Tabla 2.3. Ademas se realiza una cuantificacion del errorde estimacion de las salidas, dicho error esta dado por: e = ||x − x||. Los parametrosde sintonizacion con que se alcanzaron una desempeno deseado fueron los utilizados en elexperimento anterior.
0 10 20 30 40 50 60 7056
58
60
62
64
66
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido condensado (To)
To Experimental
To Estimada
0 10 20 30 40 50 60 7028
29
30
31
32
33
Tiempo (minutos)
Tem
pera
tura
(°C
)
Temperatura de salida del líquido de enfriamiento (Tjo
)
Tjo Experimental
Tjo Estimada
Figura 4.22: Validacion del observador de Kalman extendido con estados aumentados.
En la Fig. 4.22 se muestran las estimaciones logradas con los datos del experimento.En esta figura se observa que se tienen desempenos aceptables en las estimaciones. Lostiempos de convergencias son muy rapidos, en el caso de la temperatura de salida dellıquido condensado es 3 minutos y en la temperatura de salida del lıquido de enfriamientoes de 1.5 minutos, pero tiene un error de 0.25C en los primeros 25 minutos, posteriormentepresenta otro error en el minuto 52.6 de 0.2C.
La estimacion de U en el experimento se presenta en la Fig. 4.23. En esta se observaque se tiene un tiempo de convergencia de 9 minutos aproximadamente, con un valor de125 J/(min m2 C), el cual es aproximado al valor con que se valido el modelo. Tambiense observa una gran variacion del minutos 40 hasta el minuto 58, esto es debido a la grandiferencia que se presenta en las temperaturas de salida en ese tiempo. Ademas se tieneque la estimacion de U es muy suave debido a que se elimina la influencia del ruido demedicion. La estimacion del coeficiente de transferencia es muy similar a la presentada en

4.5. COMPARACION DE LAS ESTIMACIONES DEL PARAMETRO INTERNO U 79
0 10 20 30 40 50 60 7080
100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Figura 4.23: Estimacion de U con el observador de Kalman extendido con estados aumentados.
los demas observadores para este experimento.
0 10 20 30 40 50 60 700
1
2
3
4
5
Tiempo (minutos)
Erro
r de
Estim
ación
(°C)
Figura 4.24: Error de estimacion del observador de Kalman extendido con estados aumentados.
El error de estimacion de las salidas del experimento se presenta en la Fig. 4.24. Elerror se elimina en 2 minutos, donde se observa que se tiene un error de 0.3 C hasta elminuto 20. Posteriormente se elimina con el paso del tiempo. En el minuto 52.6 presentarotro error de 0.2C, debido a la disminucion de la temperatura de salida del lıquido de en-friamiento. Cabe mencionar que en esta prueba se obtuvieron los mas altos indices de error.
4.5 Comparacion de las estimaciones del parametro
interno U
En las siguientes figuras se muestran comparaciones de las estimaciones del parametrointerno (U), obtenidas por los observadores propuestos.

80 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR
0 5 10 15 20 25 30 35 40 45100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Forma AdaptableGran GananciaProporcional−IntegralKalman Extendido
Figura 4.25: Comparaciones de las estimaciones de U de cada observador con el experimento 1.
En la Fig. 4.25 se observan las estimaciones logradas por los observadores con losdatos del experimento 1. En esta es posible observar que las cuatro estimaciones de Utienen una respuesta similar. Los tiempos de convergencias son muy similares entre ellas.El tiempo de convergencia del observador proporcional-integral es menor en comparaciona los demas, el cual es 6.5 minutos. La estimacion lograda por el observador de Kalmanextendido con estados aumentados es la mas lenta con respecto a las otras estimaciones, en7 minutos, pero presenta una respuesta mas suave y no se aprecia ruido en la estimacion.En las respuestas de los observadores de forma adaptable y de gran ganancia se obtuvieronrespuestas muy similares con respecto a el observador proporcional-integral, en 6.8 minutosy 6.6 minutos respectivamente.
0 10 20 30 40 50 60 7080
100
120
140
160
180
200
220
Tiempo (minutos)
U (
J/(m
in m
2 °C
))
Coeficiente de transferencia de calor (U)
Forma AdaptableGran GananciaProporcional−IntegralKalman Extendido
Figura 4.26: Comparaciones de las estimaciones de U de cada observador con el experimento 2.

4.6. CONCLUSIONES 81
Por otro lado, en la Fig. 4.26 se observan las estimaciones de U logradas por los ob-servadores con los datos del experimento 2. Se aprecia que el comportamiento de los cuatroobservadores son similares. Tambien se observa que el observador proporcional-integral yel observado de gran ganancia son los que presentan menor tiempo de convergencia, 8minutos. El mas lento es la respuesta del observador de Kalman extendido con estadosaumentados, el cual tiene un tiempo de convergencia de 9 minutos.
4.6 Conclusiones
En este capıtulo se presentaron los resultados de los cuatro observadores propuestosaplicados al intercambiador de calor de la columna de destilacion binaria. Los cuatroobservadores presentan un comportamiento similar en la estimacion de U y el tiempo deconvergencia es casi el mismo en todos, por mencionar el mas rapido serıa el observadorproporcional-integral, en 6.5 minutos, y el mas lento es el observador de Kalman extendidocon estados aumentados, en 7 minutos, dichos tiempos evaluados para el experimento 1.En caso de las estimaciones de las temperaturas de salida del intercambiador de calor,las diferencias fueron mas notarias. Los mejores resultados presentados fueron los delobservador de gran ganancia, ya que su error de estimacion en ambos experimentos fuemuy cercano a cero, con un tiempo de convergencia de 2.5 minutos. Por el contrario elobservador que alcanzo mayor margen de error fue el observador de Kalman extendido conestados aumentados, principalmente en los datos del experimento 2, dicho error fue de0.3C.
Los observadores de forma adaptable, gran ganancia y proporcional-integral presen-taron resultados muy similares, tanto en tiempos de convergencia, alrededor de 6.7, 6.6 y6.5 minutos, respectivamente. Ası como tambien en los errores de estimacion, que fueron de0.1C, 0.1C y 0.15C, respectivamente, los cuales son resultados satisfactorios. Ademasse podrıa concluir que estos observadores son los que presentan una mayor facilidad deimplementacion.

82 CAPITULO 4. VALIDACION DE LOS OBSERVADORES ADAPTABLES EN PROCESOS DE INTERCAMBIO DE CALOR

Capıtulo 5
Control acotado positivo
El objetivo de este capıtulo es presentar el desarrollo y resultados en simulaciony experimentales del controlador acotado positivo, aplicado a un intercambiador de calortipo tubos concentricos. El esquema de control propuesto en este capıtulo tiene como fin laregulacion de la temperatura de salida del intercambiador de calor tipo tubos concentricos.La regulacion se logra a traves de un simple controlador que no necesita conocer todos losestados del sistema, tampoco depende de los valores exactos de los parametros internos delsistema; tiene como caracterıstica la estabilidad del sistema de lazo cerrado globalmente enel dominio del espacio de estados. Ademas, el enfoque propuesto garantiza la positividady acotamiento (evitando la saturacion) del rango del flujo de entrada, de una manera queresulta ser simple y original.
Tambien en este capıtulo se presentan los resultados obtenidos con otras tecnicas decontrol aplicadas al intercambiador de calor, dichos resultados obtenidos tienen la finali-dad de que sirvan como parametro de comparacion con el controlador propuesto.
Para validar el funcionamiento del controlador propuesto en este capıtulo se rea-lizaron pruebas, tanto en simulacion como tambien pruebas experimentales en el bancode regulacion de temperatura que se encuentra en el CENIDET, debido a que este, es unintercambiador de calor tipo tubos concentricos. En la Seccion 5.1 se presenta tanto eldesarrollo, como los resultados obtenidos en simulacion y experimentales del controladoracotado positivo aplicado al intercambiador de calor tipo tubos concentricos, tambien eneste seccion se presentan los resultados experimentales del controlador en presencia dedisturbios. En la Seccion 5.2 se muestran los desarrollos y resultados de los controladores:controlador proporcional-integral y del controlador no lineal propuesto en [Malleswararaoy Chidambaram, 1992]. Finalmente en la Seccion 5.3 se presentan algunas conclusiones.
83

84 CAPITULO 5. CONTROL ACOTADO POSITIVO
5.1 Control acotado positivo para el intercambiador
de calor tipo tubos concentricos
Se han usado varias tecnicas de control para los intercambiadores de calor en laliteratura. Por ejemplo el propuesto en [Malleswararao y Chidambaram, 1992], el cualpropone un controlador linealizante por retroalimentacion de estados, el cual se basa enun modelo compartimental simplificado (una sola celda, vease Fig. C.1.b). Desafortu-nadamente, tales tecnicas realizan una compensacion total de la dinamica del sistema conla cual se desprecian las propiedades analıticas del sistema. Otros proponen un algoritmode control predictivo generalizado, haciendo uso de los modelos de tipo ARX, ARMAX oARIMAX [Lim y Ling, 1989]. Sin embargo, estos controladores se ajustan por medio deuna identificacion del sistemas, sin considerar las leyes fısicas que determinan el compor-tamiento del proceso, tales acercamientos tambien descuidan las caracterısticas fısicas dela estabilidad del sistema. Por otra parte, ninguno de los trabajos anteriores consideranla positividad (unidireccional) y las acotaciones fısicas del rango de flujo.
Con el controlador acotado positivo, se propone un controlador simple para la regu-lacion de la temperatura de salida del flujo caliente del proceso de temperatura en elintercambiador de calor tipo tubos concentricos, considerando el flujo frıo como la entradade control. El algoritmo propuesto considera las propiedades naturales del analisis de es-tabilidad del intercambiador de calor, ası como tambien los lımites fısicos del flujo frıo, elcual es la entrada de control del proceso, por ello se le nombra controlador acotado positivo.
Considerando el modelo no lineal del intercambiador de calor tipo tubos concentricos,descrito en el Anexo C (Vease Ec. (C.1)), donde ∆T es la LMTD expresada por la Ec.(C.3). Por lo que un razonamiento fısico en el dominio de espacio de estados para elsistema (C.1) esta dado por:
D =
(To1, To2) ∈ R2|Tci < Toj < Thi, j = 1, 2
(To1, To2) ∈ R2|Tci < To1 < To2 < Thi
ContraflujoParalelo
(5.1)
donde To1 = Tco y To2 = Tho.
Considerando flujos constantes, se muestra que el campo vectorial en (C.1) tiene uncomponente apuntando al interior de D para cada punto en sus lımites. Consecuente-mente, para todo vector de estados iniciales en D, las trayectorias del sistema permanecena D en un tiempo global, y dichas trayectorias son acotadas puesto que D es acotada.Ademas, D contiene un unico conjunto invariante, compuesto por un unico punto de equi-librio (T ∗
co,T∗ho). Por ende, cada trayectoria del sistema (C.1) converge a ese unico punto
(T ∗co,T
∗ho).

5.1. CONTROL ACOTADO POSITIVO PARA EL INTERCAMBIADOR DE CALOR TIPO TUBOS CONCENTRICOS 85
La idea es entonces proponer un controlador dinamico tal que la dinamica en lazocerrado guarde las mismas caracterısticas analıticas, con Fc forzandolo a que evolucionedentro del interior de Fc, y forzando la existencia de un punto unico de equilibrio (T ∗
co, T ∗ho
y F ∗c ) donde T ∗
ho = Thd. Esto se logra a traves del siguiente esquema de control [Zavala ycol., 2007].
Proposicion 5.1 Considerando la dinamica del sistema expresado en (C.1)con Fc ∈ Fc,
se considera que Fc se calcula de manera dinamica, de acuerdo a:
Fc = kη (Fc) (Tho − Thd) (5.2)
para cualquier Thd ∈ intRh (Vease Ec. (5.4)), donde:
η (Fc) = (Fc − Fcl) (Fcu − Fc)
y k es una constante positiva lo suficientemente pequena. Entonces, para cualquier condicion
inicial en lazo cerrado del vector de estado extendido[
Tco Tho Fc
](0) ∈ D × int(Fc):
Tho → Thd cuando t →∞, con Fc(t) ∈ int(Fc), ∀t > 0 y (Tco, Tho)(t) ∈ D, ∀t > 0.
Si se evalua la funcion no lineal descrita en la Ec. (C.1) con rangos de flujos cons-tantes, se obtiene un unico punto de equilibrio (T ∗
co, T∗ho) ∈ D, por lo que T ∗
ho esta enfuncion de un punto de Fc:
T ∗ho , gh (Fc) (5.3)
Ademas, se considera que Fc tiene restricciones fısicas. Fc varia entre los limites Fcu
(lımite superior) y Fcl (lımite inferior). Lo que restringe a T ∗ho a un espacio de estados
definido por:
Rh , [gh (Fcu) , gh (Fcl)] (5.4)
Por lo que cualquier valor de Tho ∈ Rh es definido de manera unica por un valor derango de flujo F ∗
c ∈ Fc, por lo que T ∗ho es unico.
La matriz Jacobiana del sistema (C.1) con el vector de estado[
Tco Tho Fc
], esta

86 CAPITULO 5. CONTROL ACOTADO POSITIVO
expresada por:
∂f
∂x=
− 2Fc
vcρc
+2UA
vcρccpc
∂∆T
∂Tco
2UA
vcρccpc
∂∆T
∂Tho
2(Tci − Thi)
vcρc
− 2UA
vhρhCph
∂∆T
∂Tco
− 2Fh
vhρh
+2UA
vhρhCph
∂∆T
∂Tho
0
0 kη (Fc) kη′(Fc)(Tho − Thd)
∣∣∣∣∣∣∣∣∣∣∣∣∣∣x=x∗
(5.5)
donde η′(Fc) = dηdt
(Fc) = Fcu + Fcl − 2Fc, es evaluada para x∗l y x∗u (son los vectores de
estado x∗ logrados en los puntos Fcl y Fcu, respectivamente), es decir ∂f∂x
∣∣x=x∗l
y ∂f∂x
∣∣x=x∗u
,
teniendo eigenvalores k (Fcu − Fcl) (gh (Fcl)− Thd) > 0 y k (Fcl − Fcu) (gh (Fcu)− Thd) > 0,respectivamente. Esto significa que se evaluan en el lımite inferior Fcl y en el lımite su-perior Fcu. Por lo que x∗l y x∗u son puntos inestables y por consecuencia los puntos enD × ∂Fc no pueden ser alcanzados por las trayectorias del sistema asintoticamente desdeel interior del sistema en espacio de estados, o bien en su dominio.
Ahora, se considera la matriz Jacobiana expresada en la Ec. (5.5), evaluada en x∗.Teniendo un polinomio caracterıstico dado por P (λ) = λ3 + a2λ
2 + a1λ + a0, donde:
a2 ,[
2Fc
vcρc
+2Fh
vhρh
− 2UA
vcρccpc
∂∆T
∂Tco
+2UA
vhρhcph
∂∆T
∂Tho
]∣∣∣∣x=x∗
a1 ,[
4FcFh
vcρcvhρh
+4FcUA
vcρcvhρhcph
∂∆T
∂Tho
− 4FhUA
vcρcvhρhcpc
∂∆T
∂Tco
]∣∣∣∣x=x∗
y a0 , ka0 siendo:
a0 ,[4UAη(Fc)(Tci − Tco)
vcρcvhρhcph
∂∆T
∂Tco
]∣∣∣∣x=x∗
Dichos terminos cumplen con las siguientes desigualdades:
a2 > b2 ,[
2Fc
vcρc
+2Fh
vhρh
]∣∣∣∣x=x∗
> 0
a1 > b1 , − 4FhUA
vcρcvhρhcpc
[∂∆T
∂Tco
]∣∣∣∣x=x∗
> 0
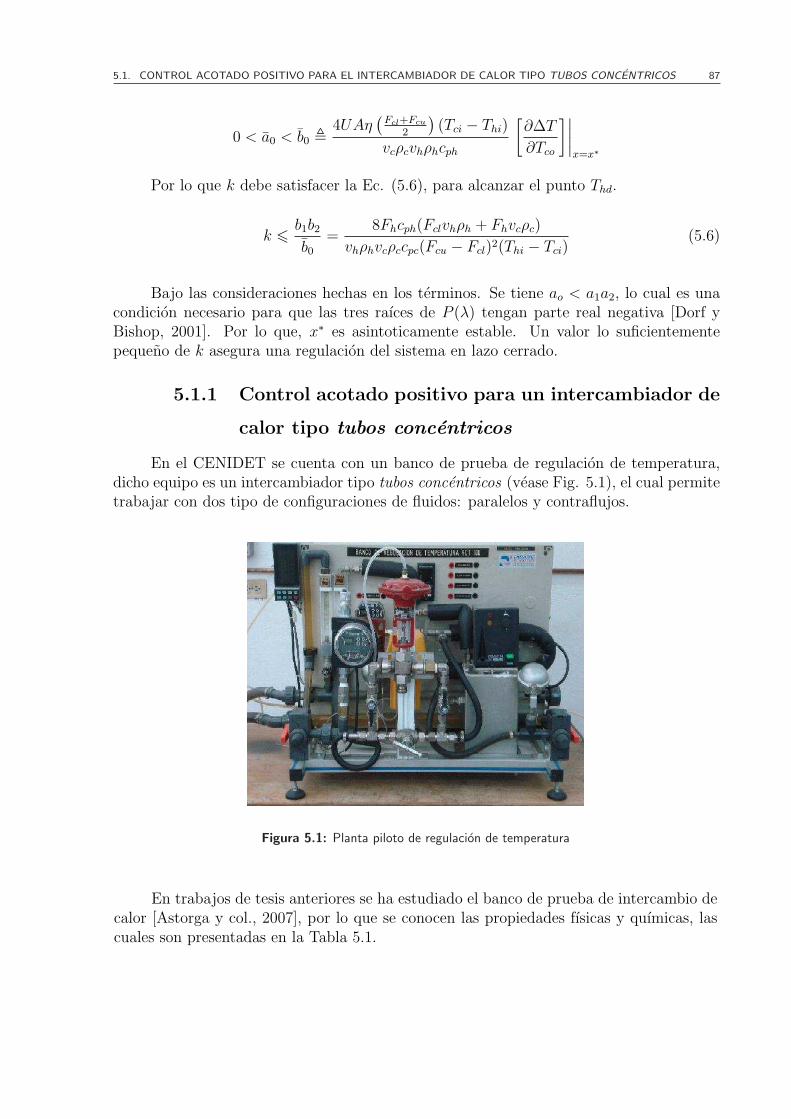
5.1. CONTROL ACOTADO POSITIVO PARA EL INTERCAMBIADOR DE CALOR TIPO TUBOS CONCENTRICOS 87
0 < a0 < b0 ,4UAη
(Fcl+Fcu
2
)(Tci − Thi)
vcρcvhρhcph
[∂∆T
∂Tco
]∣∣∣∣x=x∗
Por lo que k debe satisfacer la Ec. (5.6), para alcanzar el punto Thd.
k 6 b1b2
b0
=8Fhcph(Fclvhρh + Fhvcρc)
vhρhvcρccpc(Fcu − Fcl)2(Thi − Tci)(5.6)
Bajo las consideraciones hechas en los terminos. Se tiene ao < a1a2, lo cual es unacondicion necesario para que las tres raıces de P (λ) tengan parte real negativa [Dorf yBishop, 2001]. Por lo que, x∗ es asintoticamente estable. Un valor lo suficientementepequeno de k asegura una regulacion del sistema en lazo cerrado.
5.1.1 Control acotado positivo para un intercambiador de
calor tipo tubos concentricos
En el CENIDET se cuenta con un banco de prueba de regulacion de temperatura,dicho equipo es un intercambiador tipo tubos concentricos (vease Fig. 5.1), el cual permitetrabajar con dos tipo de configuraciones de fluidos: paralelos y contraflujos.
Figura 5.1: Planta piloto de regulacion de temperatura
En trabajos de tesis anteriores se ha estudiado el banco de prueba de intercambio decalor [Astorga y col., 2007], por lo que se conocen las propiedades fısicas y quımicas, lascuales son presentadas en la Tabla 5.1.

88 CAPITULO 5. CONTROL ACOTADO POSITIVO
Tabla 5.1: Propiedades y parametros del intercambiador de calor tipo tubos concentricos
Propiedad o parametro Valor
Area de transferencia de calor (A) 14× 10−3 m2
Calor especıfico en el lado caliente (cph) 4179 J/(kgC)
Calor especıfico en el lado frıo (cpc) 4174 J/(kgC)
Coeficiente de transferencia de calor (U) 1050 J/(segm2C)
Densidad del flujo caliente (ρh) 983.3 kg/m3
Densidad del flujo frıo (ρc) 991.8 kg/m3
Flujo del lıquido del lado caliente (Fh) 16.66× 10−3 kg/seg
Flujo maximo del lıquido del lado frıo (Fcu) 10.833× 10−3 kg/seg
Flujo mınimo del lıquido del lado frıo (Fcl) 0.833× 10−3 kg/seg
Volumen del lıquido del lado caliente (vh) 15.5× 10−6 m3
Volumen del lıquido del lado frıo (vc) 135× 10−6 m3
Ademas se considera que las temperaturas de entrada del intercambiador son: Tci =30C y Thi = 66C, para todos las pruebas presentadas en este capıtulo.
Simulacion del controlador acotado positivo
Primeramente se realizaron pruebas en simulacion del controlador acotado positivo,tomando en cuenta el modelo del intercambiador de calor tipo tubos concentricos (VeaseEc. (C.1)). Se consideran las propiedades fısicas y termodinamicas del equipo mostradasen la Tabla 5.1. Ademas se considera que el intercambiador de calor se encuentra en con-figuracion de contraflujo. Dicha simulacion del controlador se realizo bajo la interfaz deSimulink de Matlab, con el metodo de integracion de Euler, con un tiempo de integracionde un segundo. Ademas se consideraron los lımites fısicos del flujo del lado frıo Fc, loscuales son: el lımite superior Fcu y el lımite inferior Fcl (Vease Tabla 5.1). Los resultadosobtenidos fueron los que se presentan en la Fig. 5.2.
En la Fig. 5.2 se observan los resultados obtenidos para la regulacion de la temperatu-ra de salida del lado caliente Tho. La ganancia del controlador es de k = 5[1/(KgC)], conla cual se logra una buena regulacion de Tho, con respecto a la referencia. Ademas se apreciaque existe un cambio de referencia en el segundo 200, de Thd = 62.81C a Thd = 60C, lasalida Tho alcanza la referencia en 100 segundos aproximadamente. Tambien se observa

5.1. CONTROL ACOTADO POSITIVO PARA EL INTERCAMBIADOR DE CALOR TIPO TUBOS CONCENTRICOS 89
que se tiene una respuesta suave en el controlador, lo cual se aprecia en la senal de controlFc, ademas esta se encuentra dentro de los lımites de la senal de control (Fcu y Fcl), debidoa que se consideran estas restricciones, evitando con ello la saturacion de la senal de controlFc.
0 100 200 300 400 500 60059
60
61
62
63
64
Temperatura de salida del lado caliente (Tho
)
Tiempo (segundos)
Tem
pera
tura
(°
C)
Tho
Referencia
0 100 200 300 400 500 6000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control (Fc)
Tiempo (segundos)
Fluj
o (k
g/se
g)Figura 5.2: Resultados en simulacion del controlador acotado positivo en el intercambiador de calor en con-
figuracion contraflujo: Tho y Fc
Implementacion practica del controlador acotado positivo (sin distur-bios)
Posteriormente de la simulacion se paso a la implementacion practica en el banco deregulacion de temperatura que se muestra en la Fig. 5.1. Se consideran las propiedadesfısicas y quımicas de la Tabla 5.1. Tambien se consideran los lımites fısicos del flujo dellıquido frıo Fc, los cuales se toman en cuenta para este controlador. Para la implementaciondel controlador se desarrollo un programa que permite la interaccion de la planta y delalgoritmo, por lo que se utilizo el software de LabView, que se utiliza para la adquisicionde datos, el manejo de los mismos y ademas permite desarrollar algoritmos complejos,tambien permite elaborar interfaces graficas que son muy faciles de operar para cualquierusuario, la interfaz grafica de este controlador se presenta en el Anexo E (Vease la Fig.E.1).
Los mejores resultados para el controlador acotado positivo implementado en elbanco de regulacion de temperatura se muestran en la Fig. 5.3 en configuracion de con-traflujo del intercambiador de calor. Los cuales fueron obtenidos con una ganancia dek = 0.9[1/(KgC)]. El tiempo de muestreo utilizado en esta prueba es de 2 segundos.
Esta ley de control puede ser implementada para flujos paralelos (Vease la Fig. 5.4),por lo que tambien se obtuvo su respuesta, con la misma ganancia utilizada en la configu-racion de contraflujo.

90 CAPITULO 5. CONTROL ACOTADO POSITIVO
0 100 200 300 400 50059.5
60
60.5
61
61.5
62
62.5
63
63.5
64
Temperatura de salida del lado caliente (Tho
)
Tiempo (segundos)
Tem
pera
tura
(°C
)
0 100 200 300 400 5000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control (Fc)
Tiempo (segundos)
Flu
jo (
kg/s
eg)
Figura 5.3: Resultados experimentales del controlador acotado positivo en la planta piloto en configuracion
contraflujo: Tho y Fc
0 100 200 300 400 50059.5
60
60.5
61
61.5
62
62.5
63
63.5
64
64.5
Temperatura de salida del lado caliente Tho
Tiempo (segundos)
Tem
pera
tura
(°C
)
0 100 200 300 400 5000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control Fc
Tiempo (segundos)
Flu
jo (
kg/s
eg)
Figura 5.4: Resultados experimentales del controlador acotado positivo en la planta piloto en configuracion
paralelo: Tho y Fc
Como se puede observar, en ambas configuraciones se tiene una muy buena regulacionde la salida controlada Tho, debido a que el controlador no necesita conocer parametrosde la planta y su calculo es muy sencillo, esto lo hace mas facil para su implementacionpractica. Tambien este controlador no se satura siempre y cuando, se cumpla con el crite-rio de la eleccion de k, esto se debe a que se conocen los lımites de la planta. Ademas lasalida controlada Tho alcanza a la referencia Thd = 60C en 250 segundos despues de cerrarel lazo de control en la configuracion de contraflujo; y en 300 segundos en configuracionparalelo, ambos tiempos son muy aceptables. Por otro lado, se observa que las senales decontrol presentan una respuesta muy suave en ambos casos.

5.1. CONTROL ACOTADO POSITIVO PARA EL INTERCAMBIADOR DE CALOR TIPO TUBOS CONCENTRICOS 91
Implementacion practica del controlador acotado positivo (ante un dis-turbio en el flujo del lado caliente Fh)
Se procedio a probar el funcionamiento del controlador acotado positivo bajo la pre-sencia de un disturbio. Se aplico un disturbio en el flujo del lado caliente Fh (Vease laFig. 5.5). Los mejores resultados fueron con la ganancia de k = 0.9[1/(KgC)]. En estaprueba se aplicaron dos cambios de referencia y posteriormente un disturbio.
0 200 400 600 800 1000 1200 1400 160059
60
61
62
63
64
65
Temperatura de salida del lado caliente Tho
Tiempo (seg)
T ho (
°C)
Tho
Referencia
0 200 400 600 800 1000 1200 1400 16000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de control Fc
Tiempo (seg)
F c (kg
/s)
0 200 400 600 800 1000 1200 1400 16000.016
0.0165
0.017
0.0175
0.018
0.0185
0.019
0.0195
0.02
0.0205
Disturbio Fh
Tiempo (seg)
F h (kg/s
)
Figura 5.5: Resultados experimentales del controlador acotado positivo en la planta piloto en configuracion
contraflujo ante un disturbio en el flujo del lado caliente Fh

92 CAPITULO 5. CONTROL ACOTADO POSITIVO
En la Fig. 5.5 se aprecian los resultados obtenidos del controlador acotado positivo,al existir dos cambios de referencia: el primer cambio de referencia fue Thd = 62.5C en elsegundo 50 y la salida controlado Tho alcanzo a la referencia en 160 segundos; el segundocambio de referencia es de Thd = 60C en el segundo 600 y la salida controlada Tho alcanzaa la referencia en 200 segundos. Se observa que se obtiene una muy buena regulacion deTho. Por ultimo se aplica un disturbio, el cual consiste en el aumento del flujo del ladocaliente Fh en el segundo 1100, la influencia del disturbio se elimina en 200 segundos.Ademas se aprecia que la senal de control Fc es muy suave, tanto como en los cambios dereferencias como tambien en el disturbio.
5.2 Otras tecnicas de control para el intercambiador
de calor tipo tubos concentricos
Se han implementado otros tipos de controladores para este tipo de proceso, paracomparar el controlador acotado positivo se escogio implementar dos controladores, loscuales fueron un controlador proporcional-integral (es el mas comun) y el controlador nolineal presentado en [Malleswararao y Chidambaram, 1992], el cual es un control linealizan-te por retroalimentacion de estados, basado en un modelo simplificado del intercambiadorde calor (Vease Anexo D).
5.2.1 Controlador proporcional-integral
Primeramente, se realizo un controlador proporcional-integral, debido a que su leyde control es muy conocida, es muy facil de implementar y ademas no necesita conocerlas propiedades fısicas y quımicas de la planta; ası como la ley de control del controladoracotado positivo. El controlador proporcional-integral se presenta en la Ec. (5.7), la cualesta dada en forma discreta, debido a que es necesario expresarla de esta manera para suposterior implementacion practica.
Fc(h) = Fc(h− 1) + kp(e(h)− e(h− 1)) + Ie(h) (5.7)
siendo
I = kptsti
donde kp es la ganancia proporcional, ti es el tiempo integral del controlador, ts es eltiempo de muestreo y e es el error, que es la diferencia de la salida controlada con respecto

5.2. OTRAS TECNICAS DE CONTROL PARA EL INTERCAMBIADOR DE CALOR TIPO TUBOS CONCENTRICOS 93
a la referencia.
Simulacion del controlador proporcional-integral
Los resultados en simulacion del controlador proporcional-integral utilizado para laregulacion de Tho en el intercambiador de calor, se muestran en la Fig. 5.6. Las gananciascon las que se obtuvieron estos resultados fueron: kp = 8× 10−2[kg/(segC)] y ti = 5seg.
0 100 200 300 400 500 60059
60
61
62
63
64
Temperatura de salida del lado caliente (Tho
)
Tiempo (segundos)
Tem
pera
tura
(°
C)
Tho
Referencia
0 100 200 300 400 500 6000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control (Fc)
Tiempo (segundos)
Fluj
o (k
g/se
g)
Figura 5.6: Resultados en simulacion del controlador proporcional-integral en el intercambiador de calor en
configuracion contraflujo: Tho y Fc
Se observa que se obtiene una buena regulacion de la salida Tho, ya que se apreciaque se alcanza a la referencia de Thd = 60 en 100 segundos. Ademas se observa que lasenal de control Fc tiene una respuesta muy suave.
Implementacion practica del controlador proporcional-integral (sin dis-turbios)
Despues se realizo la implementacion practica del controlador proporcional-integral,para el cual se desarrollo un programa en el software de LabView que se presenta en elAnexo E (Vease la Fig. E.2). Los mejores resultados se obtuvieron con las siguientesganancia: Ki = 2.166× 10−4 y Kp = 6.25× 10−3[kg/(segC)].
En la Fig. 5.7 se aprecian los resultados obtenidos del controlador en el banco deregulacion de temperatura, donde se observa que existe una saturacion de la senal decontrol Fc, al inicio de la regulacion, posteriormente la salida controlada Tho oscila sobrela referencia debido a que la senal es muy oscilante, debido a que esta es muy sensible.

94 CAPITULO 5. CONTROL ACOTADO POSITIVO
0 100 200 300 400 50059
59.5
60
60.5
61
61.5
62
62.5
63
63.5
64
Temperatura de salida del lado caliente (Tho
)
Tiempo (segundos)
Tem
pera
tura
(°C
)
0 100 200 300 400 5000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control Fc
Tiempo (segundos)
Fluj
o (k
g/se
g)
Figura 5.7: Resultados experimentales del controlador proporcional-integral en la planta piloto en configu-
racion contraflujo: Tho y Fc
Implementacion practica del controlador proporcional-integral (ante undisturbio en el flujo del lado caliente Fh)
Se procedio a probar el funcionamiento del controlador proporcional-integral bajo lapresencia de un disturbio. Se aplico un disturbio en el flujo del lado caliente Fh similar alque se aplico en el controlador acotado positivo (Vease la Fig. 5.5). Los mejores resultadosfueron con las ganancias Kp = 1.4 × 10−3[kg/(segC)] y ti = 20seg. En esta prueba seaplicaron dos cambios de referencia y posteriormente un disturbio.
En la Fig. 5.8 se aprecian los resultados obtenidos del controlador proporcional-integral, al existir dos cambios de referencia: el primer cambio de referencia fue Thd =62.5C en el segundo 50 y la salida controlado Tho alcanzo la referencia en 150 segundos,se observa que presenta un sobre tiro (aproximadamente 0.55 C) y oscila 200 segundosantes de mantenerse sobre la referencia, esto se debe a que la senal de control es muysensible; el segundo cambio de referencia es de Thd = 60C en el segundo 600 y la salidacontrolada Tho alcanza a la referencia en 150 segundos, tiene un sobre tiro de 0.6 C ypresenta una oscilacion muy notoria. Por ultimo se aplica un disturbio, el cual consiste enel aumento del flujo del lado caliente Fh = 20×10−3kg/seg en el segundo 1100, se observaque se elimina la influencia del disturbio en 200 segundos y posteriormente de eliminarlose sigue presentado una oscilacion.

5.2. OTRAS TECNICAS DE CONTROL PARA EL INTERCAMBIADOR DE CALOR TIPO TUBOS CONCENTRICOS 95
0 200 400 600 800 1000 1200 1400 160060
60.5
61
61.5
62
62.5
63
63.5
64
64.5
65Temperatura de salida del lado caliente
Tiempo (seg)
T ho
(°C)
Set−PointT
ho
0 200 400 600 800 1000 1200 1400 16000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de control Fc
Tiempo (seg)
F c (kg
/s)
Figura 5.8: Resultados experimentales del controlador proporcional-integral en la planta piloto en configu-racion contraflujo ante un disturbio en el flujo del lado caliente Fh
5.2.2 Controlador linealizante por retroalimentacion de
estados
Tambien se implemento otro controlador, el cual consiste en un control no linealpropuesto en [Malleswararao y Chidambaram, 1992], donde utiliza una tecnica de controllinealizante por retroalimentacion, basado en un modelo simplificado del intercambiadorde calor dado por la Ec. (C.1), dicha regulacion se provoca tambien anadiendo una accionintegral, proporcional y derivativa para el calculo de la senal de control Fc (vease el AnexoD), por lo que se necesita conocer los parametros fısicos y termodinamicos de la planta.Este controlador funciona correctamente siempre y cuando se conozcan con exactitud suspropiedades.

96 CAPITULO 5. CONTROL ACOTADO POSITIVO
Simulacion del controlador no lineal propuesto en [Malleswararao y Chi-dambaram, 1992]
Los resultados obtenidos en simulacion se presentan en la Fig. 5.9. Los mejoresresultados en simulacion fueron con las ganancias: ki = 3.4 × 10−3, kp = 12.3 × 10−3 ykd = 0.166, las cuales se calculan segun lo propuesto en [Malleswararao y Chidambaram,1992].
En la Fig. 5.9 se muestran los resultados del controlador no lineal, en estos se apreciaque se tiene una buena regulacion de la temperatura de salida del lado caliente Tho. Seobserva que en el cambio de referencia de Thd = 60 en el segundo 200, la salida Tho alcanzaa la referencia en 100 segundos. La senal de control Fc presenta una senal muy suave.
0 100 200 300 400 500 60059
60
61
62
63
64
Temperatura de salida del lado caliente (Tho
)
Tiempo (segundos)
Tem
pera
tura
(°
C)
Tho
Referencia
0 100 200 300 400 500 6000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control (Fc)
Tiempo (segundos)
Fluj
o (k
g/se
g)
Figura 5.9: Resultados en simulacion del controlador no lineal [Malleswararao y Chidambaram, 1992] en el
intercambiador de calor en configuracion contraflujo (Ki = 0): Tho y Fc
Implementacion practica del controlador no lineal propuesto en [Malles-wararao y Chidambaram, 1992]
La implementacion practica de este controlador se realizo de la misma manera queen los controladores anteriores. Teniendo como interfaz, la grafica presentada en la Fig.E.3. Para las pruebas en el banco de regulacion de temperatura se utilizaron las mismasganancias que en simulacion.
En la Fig. 5.10 se observan los resultados obtenidos con el controlador no lineal pre-sentado en [Malleswararao y Chidambaram, 1992], donde la salida controlada Tho alcanzala referencia en 1300 segundos, debido a que la senal de control varıa muy lentamente.Cabe mencionar que se utilizaron otros valores en las ganancias y los resultados fueronmuy similares. Ademas se observa que la senal de control presenta mucho ruido, esto se

5.2. OTRAS TECNICAS DE CONTROL PARA EL INTERCAMBIADOR DE CALOR TIPO TUBOS CONCENTRICOS 97
0 200 400 600 800 1000 1200 1400 1600 180058
59
60
61
62
63
64
65
Temperatura de salida del lado caliente (Tho
)
Tiempo (segundos)
Tem
pera
tura
(°
C)
0 200 400 600 800 1000 1200 1400 1600 18000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control (Fc)
Tiempo (segundos)
Fluj
o (k
g/se
g)
Figura 5.10: Resultados experimentales del controlador no lineal [Malleswararao y Chidambaram, 1992] en laplanta piloto en configuracion contraflujo: Tho y Fc
debe a que algunos valores pueden variar como ∆T y U y se refleja en la senal de controlFc, ya que se toman en cuenta todos los valores numericos (propiedades fısicas y quımicas),ademas por que se necesita la retroalimentacion de los dos estados, los cuales presentanruido en sus mediciones y se reflejan considerablemente.
Tambien se realizo pruebas del controlador no lineal propuesto en [Malleswararao yChidambaram, 1992], considerando la ganancia ki = 0 y las ganancias kd y kp similares alas consideradas anteriormente.
0 100 200 300 400 500 600 700 80059
60
61
62
63
64
65
Temperatura de salida del lado caliente (Tho
)
Tiempo (segundos)
Tem
pera
tura
(°
C)
0 100 200 300 400 500 600 700 8000
0.002
0.004
0.006
0.008
0.01
0.012
Señal de Control (Fc)
Tiempo (segundos)
Fluj
o (k
g/se
g)
Figura 5.11: Resultados experimentales del controlador no lineal [Malleswararao y Chidambaram, 1992] en la
planta piloto en configuracion contraflujo (Ki = 0): Tho y Fc
En la Fig. 5.11 se presentan los resultados obtenidos del controlador no lineal con-siderando la ganancia ki = 0, en esta se aprecia que se mejora la regulacion de la salidacontrolada Tho con respecto a la prueba anterior, donde dicha salida alcanza a la referencia

98 CAPITULO 5. CONTROL ACOTADO POSITIVO
en 500 segundos. Esto se debe a que la senal de control Fc es mucho mas suave que en laprueba anterior, pero por otro lado existe todavıa ruido en la senal de control Fc, debido aque se reflejan los ruidos de medicion de los estados y la variacion de algunos parametrosinternos del intercambiador de calor. Dichos resultados de regulacion de Tho siguen siendomuy lentos con respecto a los demas controladores.
Tambien es posible apreciar que el controlador tiene muy buena respuesta en si-mulacion, debido a que se conocen los parametros y ademas, no varıa el coeficiente detransferencia de calor. Su respuesta del controlador fue muy distinta en el banco depruebas, debido a que no se conocen con exactitud los parametros de la planta y ademas,el coeficiente de transferencia de calor varıa con las temperaturas de salida.
5.3 Conclusiones
En este capıtulo se presentaron los resultados obtenidos del controlador propuestoen este trabajo de tesis, que es el controlador acotado positivo y ademas se presentanresultados con otras tecnicas de control aplicadas a el intercambiador de calor tipo tubosconcentricos. Se observo en simulacion que los tres controladores tuvieron comportamien-tos similares. Por otro lado, existio mucha diferencia en los resultados obtenidos en elbanco de regulacion de temperatura, donde el controlador acotado positivo fue muchomejor en varios aspecto, como: el tiempo pequeno en alcanzar a la referencia, senal decontrol Fc suave, esto ultimo es debido a que se consideran los lımites fısicos de la senalde control Fc y no presenta ruido en la senal de control, ya que no depende de demasiadoscalculos y mediciones, como el controlador no lineal propuesto en [Malleswararao y Chi-dambaram, 1992]. Ademas fue muy facil encontrar la ganancia en el controlador acotadopositivo, y no ası las ganancias kp y ki del controlador proporcional-integral (cabe men-cionar que la sintonizacion se realizo a prueba y error en ambos controladores), el cualpresento oscilacion en la senal de control Fc. Cabe mencionar que el controlador acotadopositivo no presento oscilacion en la senal de control, tanto en los resultados con disturbiosy sin ellos.
Tambien se presentaron los resultados obtenidos del controlador acotado positivo antedisturbios y se observo que puede eliminar rapidamente la influencia de dichos disturbios,ademas mantiene el mismo desempeno en los dos ambitos (con o sin disturbio).

Capıtulo 6
Conclusiones y
trabajos futuros
6.1 Conclusiones
En este tema de tesis se desarrollo el modelo del intercambiador de calor tipo heli-coidal enchaquetado, el cual esta basado en un balance energıa. La evaluacion del modelodescrito se llevo a cabo en la planta piloto de la columna de destilacion binaria, medi-ante la destilacion de un mezcla binaria ideal (Metanol-Etanol). La comprobacion de laproximidad del modelo con el proceso real fue llevada a cabo mediante la comparacionde las mediciones de temperaturas de salida del condensador de la columna de destilacion(en tres experimentos) con los resultados proporcionados por el simulador del modelo delcondensador (intercambiador de calor tipo helicoidal enchaquetado). La aproximacion delmodelo fue evaluada mediante el calculo del error medio cuadratico, el cual proporcionael error promedio a lo largo del experimento evaluado. Los resultados obtenidos de laevaluacion del modelo, presentan errores que van desde 0.12C hasta 0.76C para To y de0.2C hasta 0.67C para Tjo. Con dichos valores de error se puede concluir que el modeloes valido para algunos puntos de operacion y en otros puntos de operacion los parametros(variacion del coeficiente de transferencia de calor y la entalpıa de vaporizacion) juegan unpapel fundamental en la aproximacion del modelo. Con dichos errores se puede considerarque el modelo resultante se puede utilizar como un modelo aproximado del intercambiadorde calor tipo helicoidal enchaquetado.
Con el modelo del intercambiador de calor se disenaron cuatro observadores de es-tado, los cuales estiman los estados y un parametro interno (coeficiente de transferenciade calor U), debido a que dicho parametro varıa al paso del tiempo y es algo inevitable en
99

100 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
los intercambiadores de calor.
Se presentaron resultados de los observadores. A traves de estos resultados es posibleconcluir que cada observador presenta ciertas cualidades con respecto a los demas. En elcaso del observador de forma adaptable, este resulta ser muy sencillo de aplicarse en unsistema no lineal, debido a que el modelo para el desarrollo del observador no es complejoy ademas es facil de sintonizar, ya que solo cuenta con dos parametros de sintonizacion,sin embargo es importante mencionar que se limita a una clase de sistema no lineales.Con respecto al observador de gran ganancia, en este se necesita acomodar el modelo deuna forma mas especıfica, la sintonizacion del observador es mas sencilla, por que solopresenta un parametro de sintonizacion, este observador se aplica en una sola clase desistemas no lineales. El observador proporcional-integral resulto muy facil de sintonizar,debido a que tan solo necesita un parametro de sintonizacion, otra ventaja es que puedeestimar cualquier numero de parametros, independientemente de los estados que estime,a diferencia del observador de gran ganancia ya que en este se necesita estimar los mis-mos numeros de parametros y de estados, una desventaja que presenta este observador esque es para una clase de sistemas no lineales muy restringida. El observador de Kalmanextendido con estados aumentados resulto muy difıcil de sintonizar, ya que tiene variosparametros de sintonizacion, este observador tiene dos grandes ventajas ante los demas,estas son: elimina la influencia del ruido en las estimaciones y la principal es que se aplicapara toda clase de sistemas no lineales.
Los observadores de: forma adaptable, gran ganancia y proporcional-integral presen-taron tiempos de convergencias similares en las estimaciones de los estados y el parametro.El observador de forma adaptable presento tiempos de convergencias buenos. El obser-vador de gran ganancia fue el que presento mejor desempeno en la estimacion de losestados y el parametro, debido a que su error de estimacion fue menor que los demasobservadores. El observador proporcional-integral fue el que presento menor tiempo deconvergencia. Por ultimo, en el observador de Kalman extendido con estados aumentadosel ruido de medicion fue menos apreciado en la estimacion del parametro U .
Otro punto que se abordo en este tema de tesis fue el desarrollo de una ley de controlpara la regulacion de la temperatura de salida del intercambiador de calor de tipo tubosconcentricos. Dicha ley toma en cuenta la dinamica del proceso, las restricciones fısicasde la senal de entrada de la planta, ademas que es un algoritmo simple, con lo que sepermite una facil implementacion de este. Dicho algoritmo se llama controlador acotadopositivo, su nombre se debe a la consideracion de los lımites superior e inferior de la senalde entrada a la planta, con la cual se regulara la temperatura de salida. La temperatura aregular en este tema de tesis fue la temperatura de salida del lado caliente Tho y la senalde control fue Fc.

6.1. CONCLUSIONES 101
Para validar el funcionamiento de la ley de control en el intercambiador de calor tipotubos concentricos se realizaron pruebas, tanto en simulacion como experimentales en elbanco de regulacion de temperatura. Las pruebas experimentales en el intercambiadorde calor fueron en configuraciones de flujos paralelos y contraflujos. Ademas, tambien sepuso a prueba el controlador acotado positivo ante presencia de disturbios en el banco deregulacion de temperatura en configuracion contraflujo del intercambiador de calor. Entodas las pruebas, tanto en simulacion como en experimentacion los resultados fueron al-tamente satisfactorios, ya que la temperatura controlada alcanzo a la referencia en cortostiempos, tanto en configuracion de contraflujo como paralelo (en el caso experimental),ademas ante la presencia de disturbios el controlador logro compensar a la salida Tho, todose debio a la senal de control Fc calculada por el algoritmo, ya que siempre se presentouna senal muy suave y rapida. Dicha ley de control presenta un algoritmo muy simple, loque permite una facil implementacion practica.
Ademas se implementaron otros controladores los cuales fueron: controlador propor-cional-integral (clasico) y el controlador no lineal propuesto en [Malleswararao y Chi-dambaram, 1992], con dichos controladores se realizaron pruebas en simulacion y experi-mentales en el banco de regulacion. En estos no se obtuvieron resultados muy satisfactoriasen las pruebas realizadas en el banco de regulacion, en ambos controladores se presentaronproblemas.
En el caso del controlador proporcional-integral, este fue muy difıcil sintonizarlo, yaque la sintonizacion depende de las ganancias y de la condicion inicial de Fc. Ademasno considera los lımites fısicos de la planta, por lo que este controlador puede presentarsaturacion en la senal de control, ademas que es demasiado sensible, esto lo hace que oscilesobre la referencia.
En el caso del controlador no lineal propuesto en [Malleswararao y Chidambaram,1992], no se obtuvieron muy buenos resultados en el banco de regulacion, ya que la senalde control es lenta cuando existe la ganancia ki, posteriormente se realizaron pruebas sin ki
y el tiempo que le tomo a la salida controlada Tho alcanzar a la referencia fue menor, perosigue siendo demasiado lento con respecto a los demas controladores. Ademas presenta unasenal de control Fc altamente ruidosa, esto se debe principalmente, a que este controladorretroalimenta los estados del sistema, por lo que afecta en gran parte el ruido de lasmediciones; por otro lado considera constantes todos los parametros internos del sistema,cuando en la realidad existen variaciones. Tal es el caso del coeficiente de transferencia decalor, el cual varıa con las temperaturas de salida. Por ultimo este controlador presentaun algoritmo de control complejo.

102 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
6.2 Trabajos futuros
Los posibles trabajos futuros que se proponen en base a lo observado durante eldesarrollo de este trabajo de tesis se enlistan a continuacion:
• Considerar la variacion de la entalpıa de vaporizacion ∆Hvapc1 , ya que este parametro
varıa segun la concentracion de la mezcla, con ello se aproximarıa mas a la trans-ferencia total de calor del intercambiador de calor y ademas se podrıa conocer elcoeficiente de transferencia de calor total del intercambiador de calor helicoidal en-chaquetado.
• Considerar en el modelado las perdidas de calor al medio ambiente.
• Ademas tambien serıa conveniente modelar la variacion del parametro U , en laseccion Q1 y Q3 del intercambiador de calor de tipo helicoidal enchaquetado (VeaseSeccion 2.2), puesto que es un coeficiente que depende de muchas condiciones (comopuede ser la geometrıa del intercambiador de calor, las propiedades fısicas y ter-modinamicas de los fluidos).
• A traves de los observadores propuestos se puede desarrollar un sistema de deteccionde fallas en el intercambiador de calor tipo helicoidal enchaquetado, con el cual sepueda detectar la presencia del fouling en el equipo, ya que esta falla se presenta alpaso del tiempo.

REFERENCIAS 103
Referencias
Alsop, A. y T. Edgar (1989). Nonlinear Heat Exchanger Control Through the use ofpartially linearized control variables, Chemical Engineering Communications, vol. 75,pag. 155-170.
Alvarez, I., L. Munoz, X. Sun y R. Horowitz (2004). Adaptive observer for traficc densityestimation, American Control Conference IEEE, vol. 3, pag. 2705-2710.
Arcak, M., H. Gorgun, L.M. Pedersen y S. Varigonda (2004). A nonlinear observer desingfor fuel hydrogen estimation, IEEE Trans. on Control Systems Technology, vol. 12,pag. 101-110.
Astorga, C., N. Othman, S. Othman, H. Hammouri y T. McKenna (2001). Nonlinearcontinuous-discrete observers: application to emulsion polymerization reactors, Controlengineering practice, vol. 10, no. 3-13.
Astorga, C., A. Zavala, R. Mendez, V. Alvarado y J. Reyes (2007). Performance monitoringof heat exchangers via adaptive observers, Measurement, vol. 40, pag. 392-405.
Bahram, S. y O. Hossein (2003). Output Derivative Estimation and Disturbance Attenua-tion using PI Observer with Application to a Class of Nonlinear Systems, IEEE Trans.Automatic Control, vol. 7, pag. 650-858.
Bastin, G. y M.R. Gevers (1988). Stable adaptive observers for non-linear time-vaxyingsystems, IEEE, pag. 196-200.
Besancon, G. (2000). Remarks on nonlinear adaptive observer design, Systems and ControlLetters, vol. 41, pag. 271-280.
Bjarne, A. y J. Gordon (1992). Optimal heating and cooling strategies for heat exchangerdesing, J. Appl. Phys., vol. 71, no. 1.
Bohn, C. (2000). Parameter Estimation for Non-Linear Systems: Adaptive InnovationsModel Filters vs Adaptative Extended Kalman Filters, IEEE, pag. 578-582.
Boutayeb, M. y D. Aubry (1999). A Strong Traking Extended Kalman Observer for Non-linear Discrete-Time Systems, IEEE, vol. 44, no. 8, pag. 1550-1556.
Doblinger, G. (1998). Adaptive Kalman smoothing of ar signals disturbed by impulsesand colored noise, IEEE Symp. on Advances in Dig. Filt. and Sig. Proc., pag. 72-76.
Doherty, M. y M. Malone (2001). Conceptual desing of Distillation Systems. Mc GrawHill.
Dorf, R.C. y R.H. Bishop (2001). Modern Control Systems. Prentice-Hall.

104 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
Farza, M., H. Hammouri, S. Othman y K. Busawon (1997). Nonlinear observers for pa-rameter estimation in bioprocesses, Chemical Engineering Science, vol. 52, no. 23.
Farza, M., K. Busawon, y H. Hammouri (1998). Simple nonlinear observers for on-lineestimation of kinetic rates in bioreactors Control engineering practice, vol. 34, no. 3.
Fazlur, M. y R. Devanathan (1994). Modelling and Dynamic Feedback Linearization of aHeat Exchanger Model, IEEE.
Gauthier, J., H. Hammouri y S. Othman (1992). A simple observer for nonlinear systemsapplications to bioreactors, IEEE Transactions Automatic Control,vol. 37, pag. 875-880.
Hangos, K., J. Bokor y G. Szederkenyi (2004). Analysis and Control of Nonlinear Process,Systems. Springer.
Jalili, M. y B. Araabi (2003). Neuro Predictive Control of a heat exchanger: comparisonwith generalized predictive control, International Conference on Electronic Circuit andSystems, IEEE, vol. 2, pag. 14-17.
Kakac, S. y H. Liu (2002). Heat exchangers selection, rating, and thermal design. CrcPress.
Katayama, T., T. Itoh, M. Ogawa y H. Yamamoto (1990). Optimal tracking control ofa heat exchanger with change in load condition, Conference on Decision and Control,IEEE, vol. 3, pag. 1584-1589.
Krener, A.J. y A. Isidori (1983). Linearization by output injection and non-linear observers,System and Control Letters, vol. 3, pag. 47-52.
Lim, K. y K. Ling (1989). Generalized Predictive Control of a Heat Exchanger, ControlSystems Magazine, vol. 9, pag. 9-12.
Luyben, W. (1996). Process modeling, simulation and control for chemical engineers. McGraw Hill.
Malleswararao, Y.S.N y Chidambaram M. (1992). Non-linear controllers for a heat ex-changers, Journal of Process Control, vol. 2, pag. 17-21.
Mangsuli, P. y N.J Rao (2006). Adaptive Observers for a Class of Nonlinear Systemswith Application to Induction Motor, Robotics, Automation and Mechatronics, IEEEConference, vol. 1, pag. 1-6.
Marino R. (1980). Adaptive observers for :ingle output nonlinear systems, IEEE Trans.Automatic Control, vol. 9, pag. 1054-105.
REFERENCIAS 105
Perrier, M., S.F. Azevedo, E.C. Ferreira y D. Dochaun. (2000). Tuning of observer-basedestimators: theory and application to the on-line estimation of Kinetic parameters,Control Engineering Practice, vol. 8, pag. 377-388.
Rajamani, R. y J.K. Hedrick. (1995). Adaptive observers for active automotive suspen-sions: theory and experiment, IEEE Trans. Automatic Control, vol. 3, pag. 86-93.
Ramesh, P. y S. Mukhopadhyay (2004). State Estimation in Electro-Hydraulic Actuatorusing Proportional Integral Observer, IEEE, pag. 233-236.
Schmitz, K. E. (1995). Modelado y simulacion de una torre de destilacion multicompo-nente. Tesis de Maestria IPN.
Simani, Fantuzzi y Patton (2003). Model-based Fault Diagnosis in Dynamic Systems UsingIdentification. Springer-Verlag.
Skrjanc, I. y D. Matko (2000). Predictive Functional Control Based on Fuzzy Model forHeat Exchanger Pilot Plant, Trans. on Fuzzy Systems, IEEE, vol. 8, pag. 705-712.
Steiner, M. (1989). Low order dynamic models of heat exchangers. Proceedings of theInternational Symposium on District Heat Simulations, Reykjavik, Iceland.
Stephanopoulos, G. (1984). Chemical process control an introduction to theory andpractice. Mc Graw Hill.
Torres, F. L. (2005). Observacion y control no lineal de columnas de destilacion. Tesis deMaestria CENIDET.
Valencia, G. (2006). Aplicacion del Control Predictivo Multivariable a una Columna deDestilacion Binaria. Tesis de Maestria CENIDET.
Walcott, B.L. y S.H. Zak (1986). Observation of dynamical systems in the presence ofbounded non-linearities / uncertainties, Proc. of 25th IEEE Conference on Decisionand Control, pag. 961-966.
Walcott, B.L. y S.H. Zak (1987). Stare observation of nonlinear uncertain dynamical sys-tems, IEEE Trans. Automatic Control, vol. 32, pag. 166-170.
Wayne, B. (2002). Behavior of a CSTR with a Recirculating Jacket Heat Transfer System,American Control Conference, Archorage.
Weyer, E., G. Szederkenyi y K. Hangos (2000). Grey box fault detection of heat exchangers,Control Engineering Practice, vol. 8, pag. 121-131.
Wiklander, J. (2003). Performance comparison of the Extended Kalman Filter and theRecursive Prediction Error Method. Tesis de doctorado Universidad de Linkoping.
106 CAPITULO 6. CONCLUSIONES Y TRABAJOS FUTUROS
Xia, X.H. y W.B. Gao (1988). On exponential observer for non-linear systems, System andControl Letters, vol. 11, pag. 319-325.
Yachiangkam, S., C. Prapanavarat, U. Yungyuen y S. Po-ngam (2004). Speed-sensorlessseparately escited DC motor drive with an adaptive observer, TENCON, IEEE, vol. 4,pag. 163-166.
Zavala, A., C. Astorga y O. Hernandez (2007). Bounded positive non-linear integral controlfor double-pipe heat exchangers, Congreso AMCA 2007, Monterrey N.L.
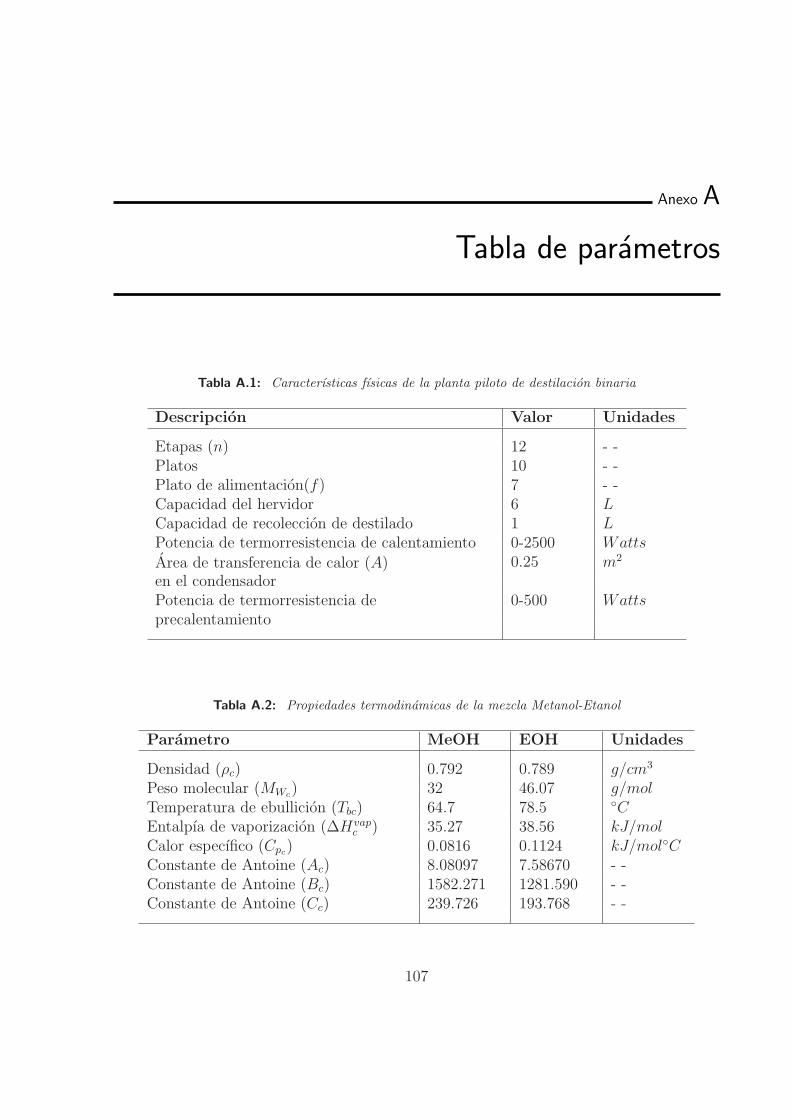
Anexo A
Tabla de parametros
Tabla A.1: Caracterısticas fısicas de la planta piloto de destilacion binaria
Descripcion Valor Unidades
Etapas (n) 12 - -Platos 10 - -Plato de alimentacion(f) 7 - -Capacidad del hervidor 6 LCapacidad de recoleccion de destilado 1 LPotencia de termorresistencia de calentamiento 0-2500 Watts
Area de transferencia de calor (A) 0.25 m2
en el condensadorPotencia de termorresistencia de 0-500 Wattsprecalentamiento
Tabla A.2: Propiedades termodinamicas de la mezcla Metanol-Etanol
Parametro MeOH EOH Unidades
Densidad (ρc) 0.792 0.789 g/cm3
Peso molecular (MWc) 32 46.07 g/molTemperatura de ebullicion (Tbc) 64.7 78.5 CEntalpıa de vaporizacion (∆Hvap
c ) 35.27 38.56 kJ/molCalor especıfico (Cpc) 0.0816 0.1124 kJ/molCConstante de Antoine (Ac) 8.08097 7.58670 - -Constante de Antoine (Bc) 1582.271 1281.590 - -Constante de Antoine (Cc) 239.726 193.768 - -
107

108 ANEXO A. TABLA DE PARAMETROS
Tabla A.3: Parametros iniciales de las pruebas experimentales
Parametro Valor Unidades
Volumen de MeOH en la alimentacion (VF1) 2000 mLVolumen de EOH en la alimentacion (VF2) 2000 mLVolumen de MeOH en el hervidor (V112) 2000 mLVolumen de EOH en el hervidor (V212) 2000 mLPresion del proceso (PT ) 101.3 kPa
Tabla A.4: Propiedades termodinamica del vapor a condensar (Metanol)
Parametro Valor Unidades
Calor especıfico en fase lıquida (Cphl) 81.6 J/molCCalor especıfico en fase gaseosa (Cphv) 43.9 J/molCCoeficiente de transferencia de calor (U) 120 J/(m2Cmin)Masa retenida en el condensador (M) 1.0455 moles
Tabla A.5: Propiedades fısicas y termodinamicas del lıquido de enfriamiento
Parametro Valor Unidades
Volumen del lıquido de agua de enfriamiento (Vc) 1.8 LCalor especıfico (Cpj) 4191 J
kgCDensidad del agua (ρj) 1000 kg/m3

Anexo B
Modelo de la columna de destilacion
Para llegar al modelado de la columna de destilacion se consideraron las siguientessuposiciones [Torres, 2005; Valencia, 2006]:
• La mezcla es binaria e ideal.
• La pureza de los componentes se consideran del 100%.
• La presion es constante a lo largo de la columna.
• La masa molar de vapor es insignificante comparada con la masa molar lıquida.
• La masa volumetrica y la masa molar lıquida retenidas en cada etapa son constantes.
• El condensador es total, por lo que la composicion del vapor que abandona la columnapor la cabeza serıa la misma que la corriente de reflujo y destilado.
• No hay perdidas de calor, la columna es adiabatica.
Diagrama de equilibrio
En el diagrama de equilibrio de una mezcla binaria mostrado en la Fig. B.1 seaprecian las curvas obtenidas de la relacion entre la fraccion molar lıquida, fraccion molarde vapor y la temperatura a una presion constante.
109

110 ANEXO B. MODELO DE LA COLUMNA DE DESTILACION
Figura B.1: Diagrama de equilibrio lıquido-vapor
A partir de dicho diagrama se puede calcular un polinomio que calcula la fraccionmolar lıquida en funcion de las temperaturas. Este polinomio se puede encontrar en laliteratura dependiendo la mezcla binaria, en este caso se analiza una mezcla metanol-etanol, por lo que dicho polinomio esta expresado:
xi = −1.840810× 10−5T 3 + 0.0051057T 2 − 0.51947T + 18.209 (B.1)
Flujos y masas molares
El calculo de los flujos molares se obtienen con las siguientes expresiones:
• Seccion de enriquecimiento
Vr = Vs + (1− q)F (B.2)
Lr = (1−R)V (B.3)
• Seccion de empobrecimiento
Vs =Qb
∆Hvap1 x1n + ∆Hvap
2 (1− x1n)(B.4)
Ls = Lr + qF (B.5)

111
• Flujos externos
F = Fv (ρ1Wt1 + ρ2(1−Wt1))
(xF
Mw1
+1− xF
Mw2
)(B.6)
D = (1−R)Vr (B.7)
B = (Ls − Vs)PAB (B.8)
El calculo de la masa molar lıquida se puede realizar por:
M1i = V1i
[(ρ1
Mw1
− ρ2
Mw2
)Wt1 +
ρ1
Mw2
](B.9)
Parametros de alimentacion
El flujo de alimentacion q se obtiene por:
q = 1 +Cpc(Tbc − TF )
∆Hvapc
(B.10)
La concentracion molar lıquida con respecto al componente ligero, es calculada por:
xF =Mw2Wt1
(Mw2 −Mw1)Wt1 + Mw1
(B.11)
donde el porcentaje en peso del componente ligero es dado por:
Wt1 =ρ1VF1
ρ1VF1 + ρ2VF2
(B.12)
Balance de materia
El balance de materia aplicado a cada plato de la columna de destilacion con respectoal componente c es:
dM1
dt= V2 − Lo −Do
dMi
dt= Vi+1 − Li − Vi + Li−1 i = 2, ..., f − 1
dMf
dt= Vf+1 − Lf − Vf + Lf−1 + F
dMi
dt= Vi+1 − Li − Vi + Li−1 i = f + 1, ..., n− 1
dMn
dt= Ln−1 − Vn −B
(B.13)

112 ANEXO B. MODELO DE LA COLUMNA DE DESTILACION
El balance de componente aplicado a cada plato de la columna de destilacion es:
dM1xD
dt= yc2V2 − xDLo − xDDo
dMixci
dt= yci+1Vi+1 − xciLi − yciVi + xci−1Li−1 i = 2, ..., f − 1
dMfxcf
dt= ycf+1Vf+1 − xcfLf − ycfVf + xcf−1Lf−1 + FxF
dMixci
dt= yci+1Vi+1 − xciLi − yciVi + xci−1Li−1 i = f + 1, ..., n− 1
dMnxcn
dt= Ln−1xcn−1 − Vnycn −Bxcn
(B.14)
Se consideran constantes los flujos en cada seccion, esto es:
Vi = Vi−1 = V
Li = Li+1 = L
Ademas se considera constantes las masas molares lıquidas en cada plato. Por lo quese tiene que el modelo queda de la siguiente manera:
M1dxD
dt= Vr(y2 − xD)
Midxi
dt= Vr(yi+1 − yi) + Lr(xi−1 − xi) i = 2, ..., f − 1
Mfdxf
dt= ycf+1Vs − xfLs − yfVr + xf−1Lr + FxF
Midxi
dt= Vs(yi+1 − yi) + Ls(xi−1 − xi) i = f + 1, ..., n− 1
Mndxn
dt= Ls (xn−1 − xcn) + Vs (ycn − xcn)
(B.15)
Con lo anteriormente mencionado se desprecia el balance de energıa, por lo que elmodelo de la columna de destilacion se describe a traves del balance de componente y lasecuaciones algebraicas anteriormente descritas.

Anexo C
Modelo del intercambiador de calor tipo:tubos concentricos
Una de las tecnicas mas utilizada para el modelado de los intercambiadores de calor,consiste en la discretizacion del intercambiador de calor en N celdas (Vease la Fig. C.1.a),de manera que cada par de celdas se describen por ecuaciones diferenciales ordinarias.Ademas, se aprecia que un conjunto de pares de N celdas en cascadas se consideran dostanques (un tubo en el que se almacena lıquido frıo y en el otro tubo se almacena lıquidocaliente) con entradas y salidas de fluidos. La transferencia de calor de los fluidos se realizaa traves del area de contacto entre los tanques.
a) b)
Figura C.1: Discretizacion del intercambiador de calor: a)n-celdas y b)una celda
Considerese el intercambiador de calor de tipo tubos concentricos en configuracioncontraflujo mostrado en la Fig. C.2.
Para obtener el modelo matematico se supone lo siguiente:
• No existe transferencia de calor con el medio ambiente.
113

114 ANEXO C. MODELO DEL INTERCAMBIADOR DE CALOR TIPO: TUBOS CONCENTRICOS
Figura C.2: Intercambiador de calor tipo: tubos concentricos en configuracion contraflujo
• Las propiedades fısicas y quımicas son constantes.
• El coeficiente de transferencia de calor se considera constante.
• Se desprecia la resistencia calorıfica del metal.
• Las temperaturas de entrada Thi y Tci son contantes.
• No existe almacenamiento de energıa en las paredes del tubo.
• Las temperaturas y velocidades de los fluidos son radialmente uniformes.
Considerando que el intercambiador de calor de la Fig. C.2 puede ser modelado conun par de celdas (Vease la Fig. C.1.b) y realizando un balance de energıa, se obtienenlas siguientes ecuaciones diferenciales (C.1) para el lado caliente y para el lado frıo delintercambiador en un intervalo de tiempo [Fazlur y Devanathan, 1994].
dTco(t)
dt=
2
vcρc
[Fc(Tci − Tco) +
UA
cpc
∆T
]
dTho(t)
dt=
2
vhρh
[Fh(Thi − Tho)− UA
cph
∆T
] (C.1)
De acuerdo con la dinamica del proceso, la mejor aproximacion del termino de dife-rencia de temperatura ∆T es a traves de la aplicacion de la diferencia de temperatura por

115
media logarıtmica (LMTD) [Steiner, 1989] la cual se muestra en la ecuacion (C.2):
∆Tl =∆T2 −∆T1
ln∆T2
∆T1
(C.2)
donde ∆T1 y ∆T2 para la configuracion de contraflujo, se expresan de la siguiente manera:
∆T1 = Thi − Tco
∆T2 = Tho − Tci
En el caso de la configuracion de flujos paralelos ∆T1 y ∆T2, se expresan:
∆T1 = Thi − Tci
∆T2 = Tho − Tco
Cuando ∆T1 = ∆T2, la ecuacion ∆T es indeterminada, lo cual es un problemaespecialmente en el caso de la configuracion contraflujo, por lo que se considera la funciondescrita en (C.3):
∆T =
∆Tl si ∆T2 6= ∆T1
∆T0 si ∆T2 = ∆T1 = ∆T0
(C.3)
Como se aprecia, el modelo del sistema es no lineal.

116 ANEXO C. MODELO DEL INTERCAMBIADOR DE CALOR TIPO: TUBOS CONCENTRICOS

Anexo D
Controlador linealizante por retroalimentacionde estados aplicado al intercambiador tipo
tubos concentricos
Considerando el modelo de un intercambiador de calor tipo tubos concentricos (veasela Ec. (C.1)) y una LMTD para fluidos en contraflujo (vease la Ec. (C.3)), se tiene quela ley control esta dada por [Malleswararao y Chidambaram, 1992]:
Fc =v − ym − 2
vhρh
(Fh + UA
Cph
∂∆TL
∂Tho
)Tho − (2UA)2
vcρcvhρhCpcCph
∂∆TL
∂Tco∆TL
4UAvcρcvhρhCph
∂∆TL
∂Tco(Tci − Tco)
(D.1)
siendo
v = −kpe− ki
∫ t
0
e (τ) dτ − kde
e = r − ym
ym = −λmr + λmym
donde r es la temperatura de referencia.
∆TL =
∆T2 −∆T1
ln ∆T2
∆T1
∆T2 6= ∆T1
∆T0 ∆T2 = ∆T1 = ∆T0
∂∆TL
∂Tco
=
[ln ∆T2
∆T1− ∆T2−∆T1
∆T1
]
[ln ∆T2
∆T1
]2 ∆T2 6= ∆T1
−1
2∆T2 = ∆T1
117

118ANEXO D. CONTROLADOR LINEALIZANTE POR RETROALIMENTACION DE ESTADOS APLICADO AL
INTERCAMBIADOR TIPO TUBOS CONCENTRICOS
∂∆TL
∂Tho
=
[ln ∆T2
∆T1− ∆T2−∆T1
∆T2
]
[ln ∆T2
∆T1
]2 ∆T2 6= ∆T1
1
2∆T2 = ∆T1
donde
∆T1 = Thi − Tco
∆T2 = Tho − Tci

Anexo E
Implementacion practica de los controladoresen el banco de regulacion de temperatura
Para la implementacion de los controladores descritos en el Capıtulo 5 en el bancode regulacion de temperatura (intercambiador de calor), fue necesario desarrollar algorit-mos en un programa que facilite la implementacion practica de las leyes de control. En laactualidad uno de los softwares mas utilizados para la adquisicion de datos y manejo delos mismos es el LabView. Tambien este software permite realizar algoritmos de controlcomplejos, ademas permite crear un ambiente muy visual, como los utilizados en las plan-tas industriales.
Las implementaciones de los tres controladores fue a traves de la utilizacion delsoftware de LabView, el cual permitio el desarrollo de las ecuaciones diferenciales de loscontroladores bajo una programacion de lenguaje C, se utilizo el metodo de integracion deEuler con pasos de integracion de 2 segundos. La comunicacion entre el intercambiador decalor y la computadora fue mediante una tarjeta de adquisicion de datos AT-MIO-16E-1de National Instruments.
En la Fig. E.1 se presenta la interfaz grafica utilizada en la implementacion delcontrolador acotado positivo. A la izquierda de dicha interfaz se observa el ajuste de lareferencia a seguir por el controlador, el tiempo de muestreo, la ganancia del controlador yel tiempo de la prueba realizada. En la parte central de la interfaz se despliegan los datosobtenidos de la temperatura controlada del intercambiador de calor (en este caso Tho) yla senal de control calculada, la cual se presenta en kg/s, ası como su representacion envoltaje (se convierte en corriente, ya que es la senal con que se manipula la valvula) y encm3/min, debido a que el indicador de flujo de la planta tiene estas unidades. Por ultimoen la parte superior derecha se despliegan las dos temperaturas de salida del intercambiadorde calor, ası como tambien se encuentra el ajuste a cero de la valvula de control del flujofrıo Fc (senal de control), los botones de guardado de los datos, paro de la prueba y elboton con el que se cierra el lazo de control.
119

120ANEXO E. IMPLEMENTACION PRACTICA DE LOS CONTROLADORES EN EL BANCO DE REGULACION DE
TEMPERATURA
Figura E.1: Interfaz grafica del controlador acotado positivo
En la Fig. (E.2) se presenta la interfaz grafica utilizada en la implementacion delcontrolador proporcional-integral. A la izquierda de dicha interfaz se observa el ajuste dela referencia a seguir por el controlador, el tiempo de muestreo, las ganancias del contro-lador (ganancia proporcional y tiempo integral) y el tiempo de la prueba realizada. En laparte central de la interfaz se despliegan los datos obtenidos de la temperatura controladadel intercambiador de calor (en este caso Tho) y la senal de control calculada, la cual sepresenta en m3/s, ası como su representacion en voltaje (se convierte en corriente, ya quees la senal con que se manipula la valvula). Por ultimo en la parte superior derecha sedespliegan las dos temperaturas de salida del intercambiador de calor (Tho y Tco), ası comotambien se encuentra el ajuste a cero de la valvula de control del flujo frıo Fc (senal decontrol), los botones de guardado de los datos, paro de la prueba y el boton con el que secierra el lazo de control.
En la Fig. E.3 se presenta la interfaz grafica utilizada en la implementacion delcontrolador no lineal que utiliza la linealizacion del modelo del intercambiador de calor.A la izquierda de dicha interfaz se observa el ajuste de la referencia a seguir por el con-trolador, el tiempo de muestreo, los ajustes del controlador (λm, ε y tss necesarios para elcalculo de las ganancias proporcional, integral y derivativa del controlador [Malleswararaoy Chidambaram, 1992], el ajuste a cero de la valvula de control del flujo frıo Fc (senal decontrol) y por ultimo la temperatura de entrada del lado frıo Tci. En la parte central de la

121
Figura E.2: Interfaz grafica del controlador proporcional-integral
interfaz se despliegan los datos obtenidos de la temperatura controlada del intercambiadorde calor (en este caso Tho) y la senal de control calculada, la cual se presenta en kg/s,ası como su representacion en voltaje (se convierte en corriente, ya que es la senal conque se manipula la valvula) y en cm3/min. En la parte superior derecha se desplieganlas dos temperaturas de salida del intercambiador de calor (Tho y Tco), ası como tambiense encuentran los botones de guardado de los datos, paro de la prueba y el boton con elque se cierra el lazo de control, ası como tambien se muestran las ganancias calculadas delcontrolador (kp, ki y kd). Por ultimo en la parte inferior derecha se muestra el tiempo dela prueba.
El software de LabView permite que se observe en las tres interfaces de los contro-ladores, una facil operacion del controlador en el equipo, debido a que se despliegan todaslas variables medibles del intercambiador de calor, ası como las variables de control y losparametros de ajuste de cada controlador. Ademas se tienen todos los botones necesariospara la aplicacion del controlador en el intercambiador de calor, ası como el guardado delos resultados obtenidos de la prueba.

122ANEXO E. IMPLEMENTACION PRACTICA DE LOS CONTROLADORES EN EL BANCO DE REGULACION DE
TEMPERATURA
Figura E.3: Interfaz grafica del controlador no lineal utilizando la linealizacion del modelo