
Modelacion de procesos-Motor CC con excitacion independiente
15
TP N°1 – Control Clásico y Moderno Bajura, Carlos - 1 - MODELACIÓN DE PROCESOS Ejercicio N° 2: A. Modelación matemática 1. Un motor de corriente continua con excitación independiente, cuyo circuito eléctrico está representado en la Figura 1, es controlado por la corriente de armadura, manteniéndose la corriente de campo () = = . Este motor acciona una carga de momento de inercia J. En este esquema se tiene: Tm: par o torque mecánico producido por el motor. Tc: par antagónico de carga. b: coeficiente de rozamiento. vb: fuerza contraelectromotriz. Ra: resistencia de la armadura. La: inductancia de la armadura. Kt: constante de proporcionalidad entre el par motor y la corriente de armadura. Kb: constante de proporcionalidad entre la velocidad angular y la tensión inducida. ia: corriente en la armadura. va: tensión aplicada a la armadura (acción de control). θ: desplazamiento angular del eje del motor. ω: velocidad angular del eje del motor. a. Escriba las ecuaciones diferenciales que describen el comportamiento dinámico de este sistema electromecánico.
-
Upload
carlosbajura -
Category
Engineering
-
view
64 -
download
3
Transcript of Modelacion de procesos-Motor CC con excitacion independiente
TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 1 -
MODELACIÓN DE PROCESOS
Ejercicio N° 2:
A. Modelación matemática
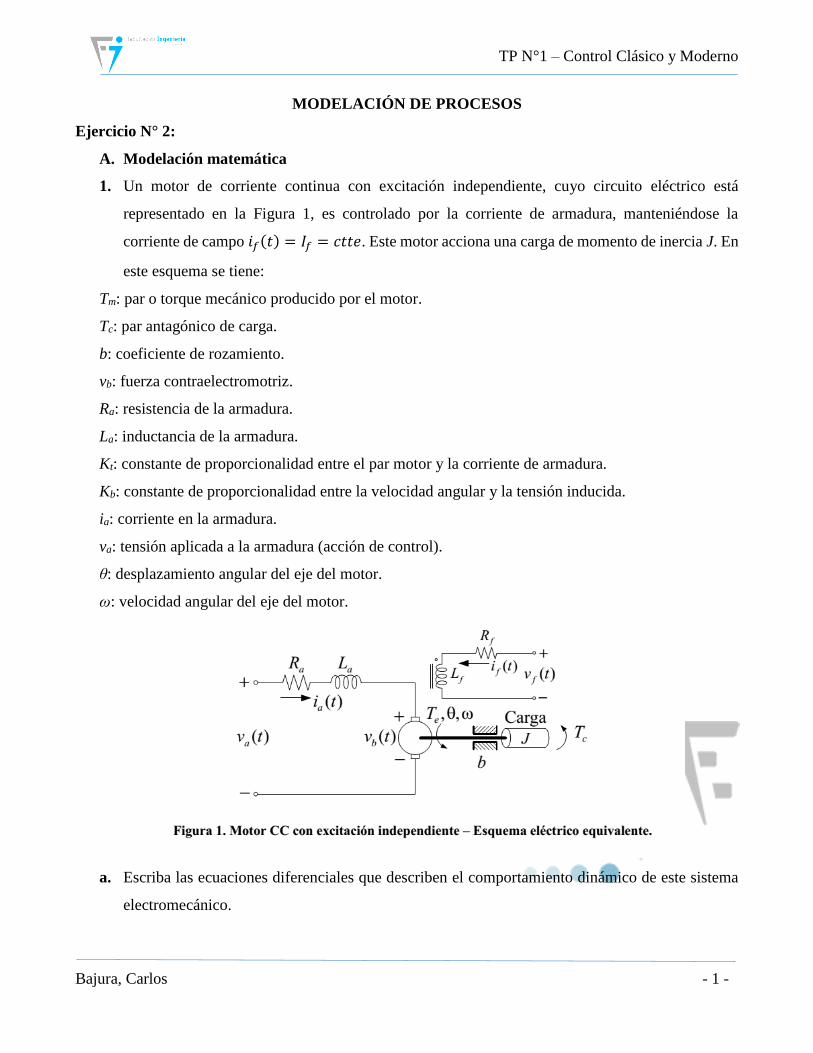
1. Un motor de corriente continua con excitación independiente, cuyo circuito eléctrico está
representado en la Figura 1, es controlado por la corriente de armadura, manteniéndose la
corriente de campo 𝑖𝑓(𝑡) = 𝐼𝑓 = 𝑐𝑡𝑡𝑒. Este motor acciona una carga de momento de inercia J. En
este esquema se tiene:
Tm: par o torque mecánico producido por el motor.
Tc: par antagónico de carga.
b: coeficiente de rozamiento.
vb: fuerza contraelectromotriz.
Ra: resistencia de la armadura.
La: inductancia de la armadura.
Kt: constante de proporcionalidad entre el par motor y la corriente de armadura.
Kb: constante de proporcionalidad entre la velocidad angular y la tensión inducida.
ia: corriente en la armadura.
va: tensión aplicada a la armadura (acción de control).
θ: desplazamiento angular del eje del motor.
ω: velocidad angular del eje del motor.
a. Escriba las ecuaciones diferenciales que describen el comportamiento dinámico de este sistema
electromecánico.

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 2 -
b. Halle la relación en el domnio de Laplace, de la velocidad angular del eje del motor, Ω(s) respecto
de la tensión de entrada Va(s) y del par de carga Tc(s).
c. Siendo Ra=0,3Ω; La=5mH; Kt=1N·m/A; Kb=1V·s/rad; J=0,02N·m·s2/rad y b=0,01N·m·s/rad,
obtenga las funciones transferencia 𝐺𝑣(𝑠) =Ω(𝑠)
𝑉𝑎(𝑠) y 𝐺𝑑(𝑠) =
Ω(𝑠)
𝑇𝑐(𝑠). Calcular los polos y ceros de
ambas funciones de transferencia y trace las respuestas en frecuencia de magnitud y de fase
respectivas. Grafique también las respuestas al escalón de 𝐺𝑣(𝑠) y de 𝐺𝑑(𝑠). Analice y obtenga
las conclusiones sobre las mismas.
d. Considerando que la constante de tiempo eléctrica del motor es mucho menor que la que la
constante de tiempo mecánica, obtenga la función transferencia 𝐺𝑝(𝑠) =Θ(𝑠)
𝑉𝑎(𝑠), donde Θ(s) es la
transformada de Laplace de la posición angular del eje del motor. Calcule la ganancia Km y
la constante de tiempo del motor τm. En este punto considere que el par de carga Tc(s)=0.
e. Trazar la respuesta en frecuencia de magnitud y de fase y la respuesta al escalón de este
sistema. Analice y concluya sobre la misma.
B. Modelación experimental
2. Dados los gráficos de magnitud y de fase de la respuesta en frecuencia de un proceso, indicados
en las Figuras 2 y 3, identificar la función de transferencia del mismo. Trazar la respuesta al
escalón de esta función de transferencia y analizar que correspondencias encuentra entre esta
última y la respuesta de magnitud de la Figura 2.

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 3 -
RESOLVIENDO
A. Modelación matemática
a. Las ecuaciones matemáticas que modelan la dinámica del motor CC con excitación independiente
se presentan a continuación:
El par electromagnético generado está dado por la siguiente relación:
Considerando que la corriente de campo es constante:
Y haciendo la siguiente igualdad:
Sustituyendo estos resultados en la ecuación (1), resulta:
Aplicando la ley de Kirchhoff de tensiones al circuito de la armadura del motor y obtenemos la
siguiente expresión:
𝑇𝑒(𝑡) = 𝐾𝑖𝑓(𝑡)𝑖𝑎(𝑡) (1)
𝑖𝑓(𝑡) = 𝐼𝑓 = 𝑐𝑡𝑡𝑒 (2)
𝐾𝐼𝑓 = 𝐾𝑡 (3)
𝑇𝑒(𝑡) = 𝐾𝑡𝑖𝑎(𝑡) (4)
𝑣𝑎(𝑡) = 𝑖𝑎(𝑡)𝑅𝑎 + 𝐿𝑎
𝑑𝑖𝑎(𝑡)
𝑑𝑡+ 𝑣𝑏(𝑡) (5)

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 4 -
La tensión contraelectromotriz está dada por:
Sustituyendo esta última en (5), tenemos:
Partiendo de la segunda ley de Newton, obtenemos la siguiente relación de equilibrio:
Reemplazando la (4) en la (8) y despejando 𝐾𝑡𝑖𝑎(𝑡):
b. Pasamos las ecuaciones (7) y (9) al dominio de Laplace, obteniendo las siguientes expresiones:
Despejando 𝐼𝑎(𝑠) de la (10):
Y luego sustituyendo en la ecuación (11), tenemos:
Operando algebraicamente:
𝑣𝑏(𝑡) = 𝐾𝑏𝜔(𝑡) (6)
𝑣𝑎(𝑡) = 𝑖𝑎(𝑡)𝑅𝑎 + 𝐿𝑎
𝑑𝑖𝑎(𝑡)
𝑑𝑡+ 𝐾𝑏𝜔(𝑡) (7)
𝑇𝑒(𝑡) − 𝑇𝑐(𝑡) − 𝑏𝜔(𝑡) = 𝐽𝑑𝜔(𝑡)
𝑑𝑡 (8)
𝐾𝑡𝑖𝑎(𝑡) = 𝐽𝑑𝜔(𝑡)
𝑑𝑡+ 𝑏𝜔(𝑡) + 𝑇𝑐(𝑡) (9)
𝑉𝑎(𝑠) = 𝑠𝐿𝑎𝐼𝑎(𝑠) + 𝑅𝑎𝐼𝑎(𝑠) + 𝐾𝑏𝛺(𝑠) (10)
𝐾𝑡𝐼𝑎(𝑠) = 𝑠𝐽𝛺(𝑠) + 𝑇𝑐(𝑠) + 𝑏𝛺(𝑠) (11)
𝐼𝑎(𝑠) =𝑉𝑎(𝑠) − 𝐾𝑏𝛺(𝑠)
𝐿𝑎𝑠 + 𝑅𝑎 (12)
𝐾𝑡 (𝑉𝑎(𝑠) − 𝐾𝑏𝛺(𝑠)
𝑠𝐿𝑎 + 𝑅𝑎) = (𝑠𝐽 + 𝑏)𝛺(𝑠) + 𝑇𝑐(𝑠) (13)
𝐾𝑡𝑉𝑎(𝑠)
𝑠𝐿𝑎 + 𝑅𝑎−
𝐾𝑡𝐾𝑏𝛺(𝑠)
𝑠𝐿𝑎 + 𝑅𝑎− (𝑠𝐽 + 𝑏)𝛺(𝑠) = 𝑇𝑐(𝑠) (14)
𝛺(𝑠) [𝐾𝑡𝐾𝑏
𝑠𝐿𝑎 + 𝑅𝑎+ (𝑠𝐽 + 𝑏)] =
𝐾𝑡𝑉𝑎(𝑠)
𝑠𝐿𝑎 + 𝑅𝑎− 𝑇𝑐(𝑠) (15)

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 5 -
Despejando 𝛺(𝑠), obtenemos la ecuación en función de dos tperminos:
En esta última ecuación podemos distinguir dos funciones de transferencia diferentes:
Y
Entonces la ecuación (17) la podemos escribir como:
Luego, la ecuacion (11) se convierte en:
Despejando 𝛺(𝑠):
𝛺(𝑠)𝑠2𝐽𝐿𝑎 + 𝑠(𝐽𝑅𝑎 + 𝑏𝐿𝑎) + 𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏
𝑠𝐿𝑎 + 𝑅𝑎=
𝐾𝑡
𝑠𝐿𝑎 + 𝑅𝑎𝑉𝑎(𝑠) − 𝑇𝑐(𝑠) (16)
𝛺(𝑠) =𝐾𝑡
[𝑠2𝐽𝐿𝑎 + 𝑠(𝐽𝑅𝑎 + 𝑏𝐿𝑎) + 𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏]𝑉𝑎(𝑠) −
(𝑠𝐿𝑎 + 𝑅𝑎)
[𝑠2𝐽𝐿𝑎 + 𝑠(𝐽𝑅𝑎 + 𝑏𝐿𝑎) + 𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏]𝑇𝑐(𝑠) (17)
𝐺𝑣(𝑠) =𝛺(𝑠)
𝑉𝑎(𝑠)=
𝐾𝑡
[𝐽𝐿𝑎𝑠2 + 𝑠(𝐽𝑅𝑎 + 𝑏𝐿𝑎) + 𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏] (18)
𝐺𝑑(𝑠) =𝛺(𝑠)
𝑇𝑐(𝑠)=
(𝐿𝑎𝑠 + 𝑅𝑎)
[𝐽𝐿𝑎𝑠2 + 𝑠(𝐽𝑅𝑎 + 𝑏𝐿𝑎) + 𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏] (19)
𝛺(𝑠) = 𝐺𝑣(𝑠)𝑉𝑎(𝑠) − 𝐺𝑑(𝑠)𝑇𝑐(𝑠) (20)
𝐾𝑡𝐼𝑎(𝑠) − 𝑇𝑐(𝑠) = (𝑠𝐽 + 𝑏)𝛺(𝑠) (21)
𝛺(𝑠) =𝐾𝑡𝐼𝑎(𝑠) − 𝑇𝑐(𝑠)
(𝑠𝐽 + 𝑏)=
𝑇𝑒(𝑠) − 𝑇𝑐(𝑠)
(𝑠𝐽 + 𝑏)= (22)
TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 6 -
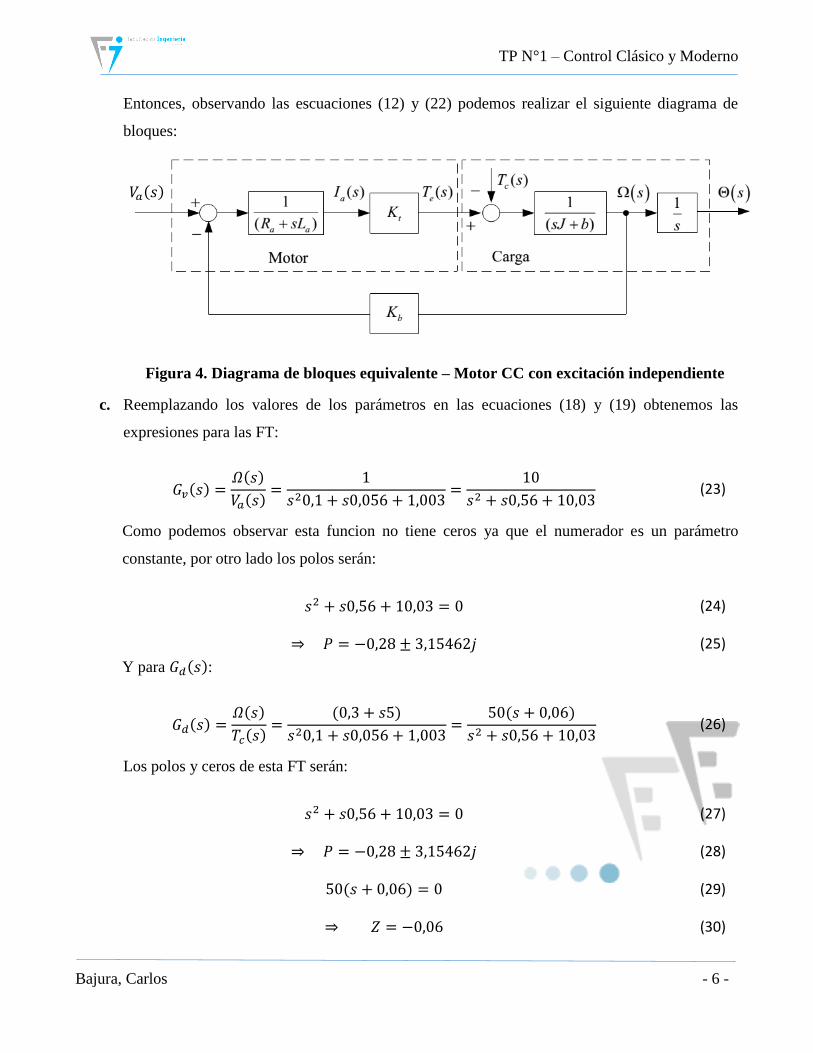
Entonces, observando las escuaciones (12) y (22) podemos realizar el siguiente diagrama de
bloques:
Figura 4. Diagrama de bloques equivalente – Motor CC con excitación independiente
c. Reemplazando los valores de los parámetros en las ecuaciones (18) y (19) obtenemos las
expresiones para las FT:
Como podemos observar esta funcion no tiene ceros ya que el numerador es un parámetro
constante, por otro lado los polos serán:
Y para 𝐺𝑑(𝑠):
Los polos y ceros de esta FT serán:
𝐺𝑣(𝑠) =𝛺(𝑠)
𝑉𝑎(𝑠)=
1
𝑠20,1 + 𝑠0,056 + 1,003=
10
𝑠2 + 𝑠0,56 + 10,03 (23)
𝑠2 + 𝑠0,56 + 10,03 = 0 (24)
⇒ 𝑃 = −0,28 ± 3,15462𝑗 (25)
𝐺𝑑(𝑠) =𝛺(𝑠)
𝑇𝑐(𝑠)=
(0,3 + 𝑠5)
𝑠20,1 + 𝑠0,056 + 1,003=
50(𝑠 + 0,06)
𝑠2 + 𝑠0,56 + 10,03 (26)
𝑠2 + 𝑠0,56 + 10,03 = 0 (27)
⇒ 𝑃 = −0,28 ± 3,15462𝑗 (28)
50(𝑠 + 0,06) = 0 (29)
⇒ 𝑍 = −0,06 (30)
𝑉𝑎(𝑠)

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 7 -
Una vez obtenidas las FT respectivas podemos trazar las curvas de respuesta en frecuencia de
magnitud y fase para ambas funciones, del mismo modo, podemos graficar también las respuestas
al escalón. Esto realizamos con la ayuda de un script escrito en el software MATLAB. Los
resultados obtenidos se presentan en las Figuras 6 y 7.
Figura 6. Curvas de las respuestas en frecuencia de magnitud y fase de 𝐺𝑣(𝑠) y 𝐺𝑑(𝑠)
clear all; clc; s=tf('s'); % Establecemos las dos FT G1=10/(s^2+(0.56)*s+10.03) G2=(50*(s+0.06))/(s^2+(0.56)*s+10.03) % Trazamos la respuesta en frecuencia magnitud y fase (Bode) figure(1); bode(G1,'b', G2, 'g--'); legend('Gv(s)','Gd(s)'); grid on; % Trazamos la respuesta al escalon figure(2); step(G1,'b', G2,'g--'); legend('Gv(s)','Gd(s)'); grid on;
Figura 5. Script en MATLAB para graficar las respuestas en frecuencia y las respuestas
al escalón

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 8 -
Figura 7. Curvas de las respuestas al escalón de 𝐺𝑣(𝑠) y 𝐺𝑑(𝑠)
En la Figura 6 se presentan las curvas de la respuesta en frecuencia de magbitud y fase para ambas
funciones de transferencias de las ecuaciones (23) y (26), como podemos ver cuando conectamos la carga
al motor tenemos una ganancia negativa de -10dB lo cual manifiesta el esfuerzo contrario que ejerce la
carga sobre el motor. Las dos funciones presentan un pico de resonancia a una frecuencia de
arpoximadamente 3,19 rad/s. Podemos observar ademas que se trata de un sistema amortiguado con un
par de polos complejos conjugados con parte real negativa.
En la Figura 7, la cual representa la respuesta al escalón para las dos FT, Podemos apreciar
nuevamente que se trata de dos sitemas amortiguados con un tiempo de asentamiento bastante elevado,
el cual aumenta aún más cuando se conecta la carga. También podemos ver que al conectar dicha carga,
los valores de amplitudes de las oscilaciones para la respuesta son mucho más elevados que en el caso
en que está sin carga.

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 9 -
d. Considerando que la constante de tiempo eléctrica del motor es mucho menor que la que la
constante de tiempo mecánica:
Y Sabiendo que:
Pasando esta última al dominio de Laplace, considerando 𝜃(0) = 0:
Remplazando el resultado de la (33) en 𝐺𝑝(𝑠):
Y con 𝐿𝑎 ≈ 0, la 3cuación (34) nos queda:
Luego, Factorizando el denominador, obtenemos:
De la ecuación (36) obtenemos que la contante de tiempo del motor es:
Y la ganancia estática es:
𝜏𝑒 ≪ 𝜏𝑚 ⇒ 𝐿𝑎 ≈ 0 (31)
𝜃(𝑡) = ∫ 𝜔(𝑡)𝑑𝑡𝑡
0
+ 𝜃(0) (32)
Θ(𝑠) =1
𝑠Ω(𝑠) ⇒ Ω(𝑠) = 𝑠Θ(𝑠) (33)
𝐺𝑝(𝑠) =Θ(𝑠)
𝑉𝑎(𝑠)=
Ω(𝑠)
𝑠𝑉𝑎(𝑠)=
𝐾𝑡
𝐽𝐿𝑎𝑠3 + 𝑠2(𝐽𝑅𝑎 + 𝑏𝐿𝑎) + 𝑠(𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏) (34)
𝐺𝑝(𝑠) =𝐾𝑡
𝑠2𝐽𝑅𝑎 + 𝑠(𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏) (35)
𝐺𝑝(𝑠) =𝐾𝑡
[𝑠𝐽𝑅𝑎
(𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏)+ 1] 𝑠(𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏)
(36)
𝜏𝑀 =𝐽𝑅𝑎
(𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏) (37)
𝐾𝑚 =𝐾𝑡
(𝑏𝑅𝑎 + 𝐾𝑡𝐾𝑏) (38)

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 10 -
Reemplazando los valores de los parámetros en las ecuaciones (37) y (38), llegamos a los
siguientes resultados:
Y
De forma similar, reemplazando los valores e los parámetros en la ecuación (35), llegamos a:
Como podemos ver, esta FT no posee ceros, pero si posee dos polos:
e. A partir de estos resultados podemos trazar la respuesta en frecuencia de magnitud y fase, como
también la respuesta al escalón de 𝐺𝑝(𝑠). Mediante un script en MATLAB obtuvimos las gráficas,
las cuales se ilustran en las Figuras 8 y 9.
𝜏𝑀 =0,02 ∙ 0,3
(0,01 ∙ 0,3 + 1)= 5,98 𝑚𝑠 (39)
𝐾𝑚 =1
(0,01 ∙ 0,3 + 1)= 0,997
𝑟𝑎𝑑
𝑉 ∙ 𝑠 (40)
𝐺𝑝(𝑠) =1/0,006
𝑠20,02 ∙ 0,3 + 𝑠(0,01 ∙ 0,3 + 1)=
500/3
𝑠(𝑠 + 1003/6) (41)
𝑠(𝑠 + 1003/6) = 0 (42)
⇒ 𝑃1 = 0
(43)
⇒ 𝑃2 = −1003
6= −167.166 (44)

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 11 -
Figura 8. Curva de la respuesta en frecuencia de magnitud y fase de 𝐺𝑝(𝑠)
Figura 9. Curva de la respuesta al escalón de 𝐺𝑝(𝑠)

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 12 -
En la Figura 8, la cual representa la respuesta en frecuencia de la FT 𝐺𝑝(𝑠), vemos que al principio
la curva de magnitud presenta una inclinación de -20dB por década lo cual es debido al polo que está
ubicado en el origen, luego para la parte de frecuencias un poco más altas la curva toma una inclinación
de -40dB por década lo cual se debe, además del polo ubicado en el origen, a otro polo real negativo
ubicado sobre el eje.
B. Modelación experimental
Figura 10. Curva de la respuesta en frecuencia de magnitud y fase
ωc
-45°
ωc
7 -3dB

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 13 -
Analizando el gráfico de magnitud podemos observar que la curva está desplazada
aproximadamente 7𝑑𝐵 hacia arriba, con lo cual obtenemos:
En el gráfico de fase tenemos que la fase para la constante es cero, entonces:
Trazando una recta horizontal a partir de valor de 45° hasta cortar la curva en el gráfico de fase,
en ese punto obtenemos la frecuencia de corte de la función de transferencia. El valor obtenido es:
Pasamos a rad/s:
Volviendo sobre la curva de magnitud, vemos que a partir de este valor de frecuencia la curva
comienza a descender. Tomando dos puntos sobre la parte lineal de la curva con una separación de una
década obtenemos un valor de pendiente de -20dB por década, esto nos indica que tenemos un polo
simple real negativo en nuestra función de transferencia.
La función de transferencia para este caso está determinada por siguiente ecuación:
Reemplazando los datos obtenidos de los gráficos, nos queda:
Que es la expresión final de la función de transferencia.
7𝑑𝐵 = 20𝑙𝑜𝑔|𝐾| ⇒ |𝐾| = 107/20 = 2.238
(45)
𝜃𝐾 = 0° ⇒ K es un valor positivo
𝑓𝑐 = 0.9 𝐻𝑧
(46)
𝜔𝑐 = 2𝜋𝑓𝑐 = 2𝜋0.9 𝐻𝑧 =9
5𝜋
𝑟𝑎𝑑
𝑠= 5,651
𝑟𝑎𝑑
𝑠
(47)
𝐺(𝑠) =𝐾
1 + 𝑠1/𝜔0 (48)
𝐺(𝑠) =2.238
1 + 𝑠1
5,651
(49)

TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 14 -
Utilizando el software MATLAB, realizamos el trazado de los gráficos de la respuesta en frecuencia de
magnitud y fase y la comparamos con los gráficos de la guía, también graficamos la correspondiente
respuesta al escalón para la FT.
Figura 11. Curva de la respuesta en frecuencia de magnitud de 𝐺(𝑠)
Superposición de las curvas original y la obtenida con los cálculos.
clear all; clc; num=[ 0 0 2.238]; den= [0 5/(9*pi) 1]; G=tf(num,den) figure(1); % Graficamos la respuesta en frecuencia de la FT bode (G); grid on; figure(2); % Graficamos la respuesta al escalon de la FT step (G); grid on;
TP N°1 – Control Clásico y Moderno
Bajura, Carlos - 15 -
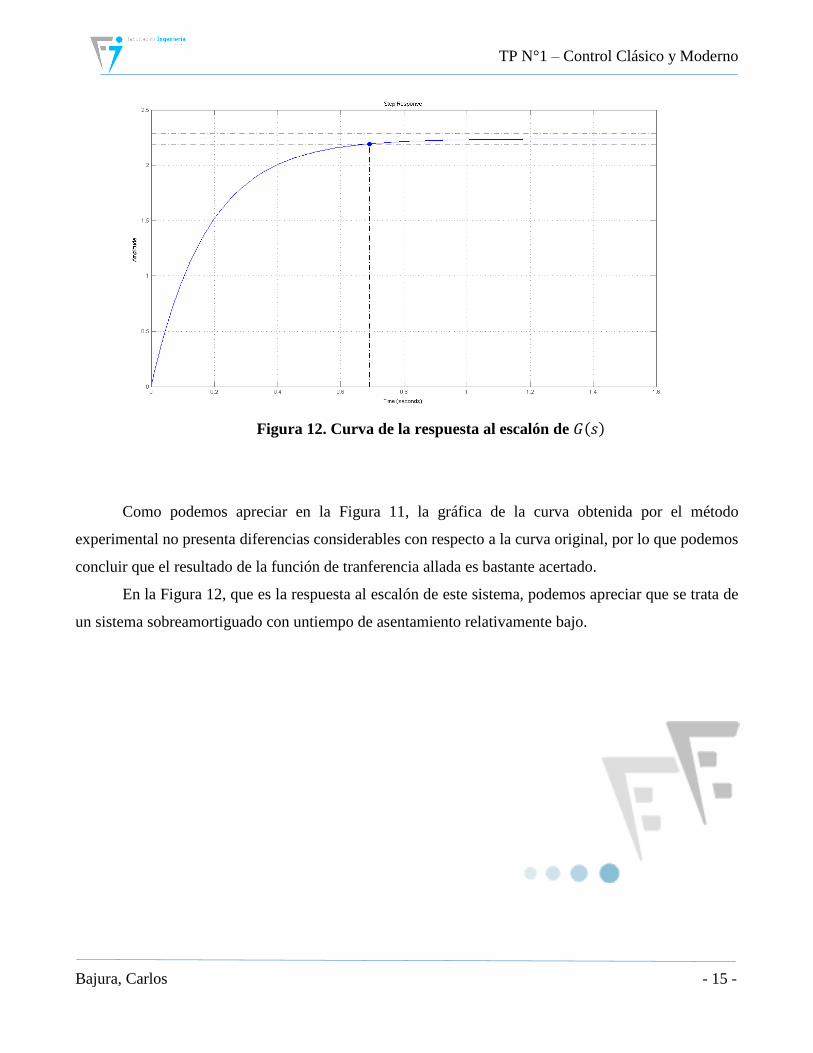
Figura 12. Curva de la respuesta al escalón de 𝐺(𝑠)
Como podemos apreciar en la Figura 11, la gráfica de la curva obtenida por el método
experimental no presenta diferencias considerables con respecto a la curva original, por lo que podemos
concluir que el resultado de la función de tranferencia allada es bastante acertado.
En la Figura 12, que es la respuesta al escalón de este sistema, podemos apreciar que se trata de
un sistema sobreamortiguado con untiempo de asentamiento relativamente bajo.


















