Metodos Neuronales En Sistemas Difusos
15
Métodos Neuronales en Sistemas Difusos Al usar las técnicas de entrenamiento de redes neuronales se permite la habilidad de incrustar la información empírica dentro de los sistemas difusos. Esto expande el rango de aplicaciones en los cuales los sistemas difusos pueden ser usados. El usar ambas informaciones (experta y empírica) realza la utilidad de los sistemas difusos. Una de las limitaciones de los sistemas difusos viene de la dimensionalidad. Una limitación que se tiene al solo utilizar el conocimiento experto es la inhabilidad de afinar eficazmente un sistema difuso el cual de varias salidas precisas y posiblemente contradictorias. El uso del error basado en las técnicas de entrenamiento permite a los sistemas difusos aprender la complejidad inherente en los datos empíricos. Introducción a la sinergia Este capitulo se enfoca hacia el camino de cómo proveer sistemas difusos con capacidades de aprendizaje neuronal con el propósito de hacer estos mas adaptativos. Aunque ambas aproximaciones difusas y neuronales poseen notables propiedades cuando se emplean individualmente, hay grandes ventajas usándolos juntos. En el dominio de la inteligencia humana, hay absolutamente una sinergia(Concurso activo y concertado de varios órganos para realizar una función) entre la transducción neuronal y el proceso de señales sensoriales, por una parte, el cognitivo, perceptual y altas funciones lingüísticas del cerebro, en la otra. A continuación se tiene un ejemplo del proceso involucrado en nuestra conciencia en cuanto a la temperatura ambiente(ver fig. 1). La sensación de la temperatura esta basada en dos clases de receptores de temperatura en la piel: un señalamiento de calor y otro de frío. Las fibras neuronales de miles de receptores de temperatura entran a la médula espinal, y ascienden dentro del ventral y lateral spinothalamic y terminan en la región del Ventrobasal thalamus(en la parte mas baja del cerebro) como se muestra en la figura 1. Las células llevan esta información a la corteza cerebral (la parte mas alta del cerebro). Finalmente en la corteza cerebral estas sensaciones de temperatura se logran fusionar y expresar lingüísticamente. De esta forma una persona puede conocer que la temperatura en el cuarto esta fría o cálida o caliente, todas las categorizaciones que se tiene al sentir la temperatura. Esto llega hacer la base de las decisiones y acciones humanas, como por ejemplo apagar o accionar el aire acondicionado de acuerdo a la temperatura. Por analogía nosotros podemos entrenar una red neuronal y mapear un grupo de medidas de temperatura para el ambiente a un grupo de valores difusos. Fig. 1
Transcript of Metodos Neuronales En Sistemas Difusos

Métodos Neuronales en Sistemas Difusos
Al usar las técnicas de entrenamiento de redes neuronales se permite la habilidad de incrustar la información empírica dentro de los sistemas difusos. Esto expande el rango de aplicaciones en los cuales los sistemas difusos pueden ser usados. El usar ambas informaciones (experta y empírica) realza la utilidad de los sistemas difusos.
Una de las limitaciones de los sistemas difusos viene de la dimensionalidad. Una limitación que se tiene al solo utilizar el conocimiento experto es la inhabilidad de afinar eficazmente un sistema difuso el cual de varias salidas precisas y posiblemente contradictorias. El uso del error basado en las técnicas de entrenamiento permite a los sistemas difusos aprender la complejidad inherente en los datos empíricos.
Introducción a la sinergia
Este capitulo se enfoca hacia el camino de cómo proveer sistemas difusos con capacidades de aprendizaje neuronal con el propósito de hacer estos mas adaptativos.Aunque ambas aproximaciones difusas y neuronales poseen notables propiedades cuando se emplean individualmente, hay grandes ventajas usándolos juntos.
En el dominio de la inteligencia humana, hay absolutamente una sinergia(Concurso activo y concertado de varios órganos para realizar una función) entre la transducción neuronal y el proceso de señales sensoriales, por una parte, el cognitivo, perceptual y altas funciones lingüísticas del cerebro, en la otra.
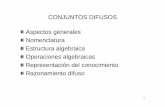
A continuación se tiene un ejemplo del proceso involucrado en nuestra conciencia en cuanto a la temperatura ambiente(ver fig. 1).La sensación de la temperatura esta basada en dos clases de receptores de temperatura en la piel: un señalamiento de calor y otro de frío.
Las fibras neuronales de miles de receptores de temperatura entran a la médula espinal, y ascienden dentro del ventral y lateral spinothalamic y terminan en la región del Ventrobasal thalamus(en la parte mas baja del cerebro) como se muestra en la figura 1. Las células llevan esta información a la corteza cerebral (la parte mas alta del cerebro). Finalmente en la corteza cerebral estas sensaciones de temperatura se logran fusionar y expresar lingüísticamente. De esta forma una persona puede conocer que la temperatura en el cuarto esta fría o cálida o caliente, todas las categorizaciones que se tiene al sentir la temperatura. Esto llega hacer la base de las decisiones y acciones humanas, como por ejemplo apagar o accionar el aire acondicionado de acuerdo a la temperatura. Por analogía nosotros podemos entrenar una red neuronal y mapear un grupo de medidas de temperatura para el ambiente a un grupo de valores difusos.
Fig. 1

Sistemas Híbridos (neuronal-difuso)
Los métodos neuronales pueden ser usados en la construcción de sistemas difusos como otra forma de entrenamiento. Estas pueden también ser usados para la selección de reglas y determinación de funciones de membresía.Los sistemas Híbridos son sistemas que emplean redes neuronales y sistemas difusos.
De manera abstracta, un sistema puede ser observado como se muestra en la figura 2(a), la cual es una relación entre las entradas y salidas (donde la relación no es necesariamente una función, pero es una relación mas general como un mapeo de “muchos a muchos”).
En la figura 2(b) y 2(c) tenemos dos extremos idealizados en donde en la fig.(b) conocemos exactamente como el sistema debe estar trabajando pero no contamos con ejemplos del comportamiento de la entrada-salida, en la fig. (c) nosotros conocemos el comportamiento de la entrada y salida, pero no tenemos conocimiento de los sistemas internos.
En el primer caso, es conveniente escribir las reglas difusas (if/then) en el nivel apropiado de precisión para describir el comportamiento del sistema. En el segundo caso, es conveniente usar los datos disponibles de entrada-salida para entrenar redes artificiales a sistemas internos. Por lo tanto podemos utilizar varias herramientas híbridas de redes neuronales y difusas para obtener exitosamente modelos de sistemas.
El arreglo más grande de condiciones en un sistema puede ser el que cuenta con una gran variedad de series y combinaciones en paralelo de sistemas neuronales y difusos.Para un entender lo anterior considere el siguiente(ver fig. 3) ejemplo:
La red neuronal es entrenada para recibir tres medidas como entradas(datos eléctricos y visuales para una automatización de prueba de una estación que aproxima los componentes electrónicos con el propósito de eliminar los defectos físicos).
Fig. 2(a)
Fig. 2(b)

Funcionamiento
La entrada es mapeada a 2 valores numéricos que sirven como entrada al algoritmo difuso. La salida del modulo de la neurona indica el grado de daño físico que tiene el componente(un numero entre 0 y 1) y la señal de porcentaje de ruido(un numero entre 0 y 30). Estas 2 características son subsecuentemente entradas en un sistema difuso donde las variables difusas a mapear serán la señal de porcentaje de ruido y la información de la calidad y daño físico del componente. La salida del sistema difuso es una acción(decisión) la cual ya sea que acepte o rechace el componente.
Por lo tanto, el filtrado neuronal y de las características de espacio del mapeo de las mediciones numéricas pueden facilitar la rápida acción para un controlador difuso.
Redes Neuronales para determinar Funciones de Membresía
La determinación de una función de membresía puede ser observada como una agrupación de datos y clasificación del problema. Primero el dato es clasificado dentro de clusters y los valores de membresía son dados a patrones individuales en los clusters. Las arquitecturas de redes neuronales como los mapas organizativos de Kohonen Self, están bien situados para encontrar clusters en los datos de entrada. Después los centros de los clusters son identificados, el ancho de los parámetros de las funciones SOM, las cuales son usualmente Gaussianas, pueden ser grupos, así que las salidas de la función SOM son los valores de membresía.
Una metodología de implementación del tipo “2 etapas de proceso” es el algoritmo de Adeli-Hung. La primera etapa es llamada “clasificación”, la cual una red neuronal es usada para agrupar o clasificar dominios de datos dentro de un cierto número de clusters. La segunda etapa es llamada “fusificación.”, la cual consiste en un proceso de fusificación donde los valores de membresía difusos son asignados en conjuntos de cluster de clasificación.
Supongamos que tenemos N patrones de entrada con M componentes. El algoritmo Adeli-Hung construye dos capas neuronales con M entradas y C clusters. Los clusters son añadidos como nuevas entradas, las cuales no tienen gran parecido con los clusters viejos, y estos son presentados a la red neuronal.
Los pasos del algoritmo son los siguientes:
1. Calcular el grado de diferencia entre la entrada del vector Xi y cada centro del cluster Ci.
dist X C x ci j ijj
M
( , ) ( )= −=
∑ 2
1
donde: xj es la jth entrada.cij es el jth componente del ith cluster.M es el numero de clusters.
2. Encontrar el cluster más cercano al patrón de entrada y llamar este Cp.
3. Comparar la distancia del cluster más cercano: dist(X,Cp) con alguna distancia predeterminada. Si este es más cercano que la distancia predeterminada, añade este al cluster, si este es más lejano que el cluster predefinido, entonces añade un nuevo cluster y su centro en la entrada del vector. Cuando una entrada es añadida a un cluster, el centro del cluster(vector prototipo) es recalculado como el significativo de todos los patrones del cluster.
[ ]C c c cn
Xp p p pMp
ip
i
np
= ==∑1 2
1
1...
Fig. 3

4. La membresía de un vector Xi a un cluster Cp es definida como:
µκ
κκ
p
wip
p
wip
p wip
p
if D X C
D X Cif D X C
=>
− <
0
1
( , )
( , )( , )
Donde: κ es el ancho de una función de membresía triangular.
( ) ( )D X C x cwip
p ijp
pjj
M
, = −=
∑ 2
1
, el peso de la norma, es la distancia Euclidiana:
Un ejemplo en Matlab de la implementación del algoritmo de Adeli-Hung es el siguiente:
X=[1 0 .9;0 1 0;1 1 1;0 0 0;0 1 1;.9 1 0;1 .9 1;0 0 .1];% EntradasC=[1 0 1]; % Matriz de clusters.data=[1 0 1 1]; % Matriz de datos; 4a. columna especifica las clases.tolerance=1; % Valores de tolerancia usados para crear nuevos clusters.for k=1:length(X);% Paso1: Encontrar la distancia Euclidiana para cada centro del cluster.
[p,inputs]=size(C);for i=1:p
distance(i)=dist(X(k,:),C(i,:)).^.5;end
% Paso 2: Encontrar el cluster mas cercano.ind=find(min(distance)==distance);
% Paso 3: Comparar con una tolerancia predefinida.if min(distance)>tolerance
C=[C;X(k,:)];% Hacer X un Nuevo centro del cluster.
data=[data;[X(k,:) p+1]];else
% Calcular el centro del cluster viejo.data=[data;[X(k,:) ind]]; % Añandir un Nuevo patrón de datos.cluster_inds=find(data(:,4)==ind);% Otros clusters en las clases.for j=1:inputs
C(ind,j)=sum(data(cluster_inds,j))/length(cluster_inds);end
end% Paso 4: Calcular las membresías de todas las p clases.
mu=zeros(p,1);for i=1:p
D=dist(X(k,:),C(i,:)).^.5;if D<=tolerance;
mu(i)=1-D/tolerance;end
endendC % Despliega los prototipos del cluster.

data % Despliega todas los vectores de entrada y sus clasificaciones. mu % Despliega las membresías de las ultimas entradas de cada prototipo.save AHAdata data C% Guarda los resultados para la siguiente sección. Salidas
C =1.0000 0 0.9500
0 0.3333 0.03330.6667 0.9667 1.00000.9000 1.0000 0
data =1.0000 0 1.0000 1.00001.0000 0 0.9000 1.0000
0 1.0000 0 2.00001.0000 1.0000 1.0000 3.0000
0 0 0 2.00000 1.0000 1.0000 3.0000
0.9000 1.0000 0 4.00001.0000 0.9000 1.0000 3.0000
0 0 0.1000 2.0000mu=
00.6601
00
Hay cuatro clusters creados para la matriz de datos “X” y sus vectores prototipos fueron almacenados en la matriz “C”. Los primeros tres elementos en cada fila de la matriz de datos es el dato original y la ultima columna contiene el identificador para el cluster mas cercano a este. El vector “mu” contiene la membresía del ultimo vector de datos de cada cluster. Puede observarse que este es el mas cercano al vector prototipo numero 2.
Los métodos usados en la categorización de un universo de discurso son típicamente basados en algunos tipos de Kohonen o redes de aprendizaje no supervisado. Un método de agrupamiento de patrones basado en el algoritmo de rasgo mapeo de Kohonen ha sido usado por la determinación de funciones de membresía por Pham y Bayro-Corrochano (1994). El método es primero aplicado al conjunto de datos entrenado para dividir lo entre el conjunto de etiquetas usando el algoritmo de Kohonen y un procedimiento de conjunto etiquetado. El conjunto de datos es entonces empleado para entrenar el perceptrón de tres niveles. El acercamiento es autoorganizado por virtud del algoritmo de Kohonen y produce salidas difusas como consecuencia de la red de retropropagación.
Kuo, Cohen y Kumara de Penn Satet han tomado uno similar no obstante diferentes acercamientos en desarrollo de un nuevo modelo difuso autoorganizativo y autoajustable acercándose con capacidades aprendidas. Básicamente su acercamiento consiste en dos etapas: un estado auotorganizativo y un estado autoajustable. En la primera etapa, los datos de entrada son divididos entre algunos grupos por aplicación aspectos de mapas de Kohonen. Las funciones de distribución Gaussiana son empleadas como la forma estándar de las funciones de membresía. Las herramientas de estadística son usadas para determinar el centro y la altura de las funciones de membresía de cada grupo. El error de la retropropagación atenúa los parámetros involucrados. La estimación neuronal hacia delante para la determinación de funciones de membresia y la clasificación difusa también han sido investigadas por Purushotaman y Karayiannis de la Universidad de Houston, mientras Higgins y Goodman del MIT construyen diferentes métodos para el aprendizaje de funciones de membresía y reglas de un conjunto de ejemplos. Sus métodos es una función general de aproximación de sistemas usando tres pasos: Primero, aprende las funciones de membresía y crea una celda basada en reglas de representación, segundo, simplifica la celda basada de reglas usando una información teórica aproximándose de la inducción de reglas de datos de valores discretos, y finalmente construyendo una red neuronal para computar el valor de la función dada de variables independientes.
Un uso típico de las redes neuronales que producen funciones de membresia involucran un proceso de dos etapas. El primer paso es esencialmente una clasificación donde una red neuronal es usada para clasificar o dominar un

conjunto de datos dentro de una cierto número de conjuntos. Es segundo paso es un proceso de fusificación donde los valores de las funciones difusas para cada instancia entrenada en un conjunto de soporte, conjuntos clasificados, son evaluados.
Determinación de las funciones de membresía a través del Algorimto de Adeli-Hung
Supongamos que nuestros datos consisten de N instancias entrenadas X1, X2,..., XN y nosotros tenemos M patrones de cada instancia Xi = [Xi1, Xi2,... XiM]. El vector medio de estas instancias puede ser definido como:
Para N + 1 instancias el vector medio puede ser expresado con XN como sigue:
La clasificación por AHA es ejecutada usando una topología y cambio de peso en una red de dos niveles (flat) donde el número de entradas equivale al numero de patrones (M) en cada instancia entrenada y el número de nodos de salida equivale al número de grupos.
El algoritmo usa una red NN(M,1) con M entradas y sin un determinado número de salidas. La primera instancia entrenada adquiere asignación del primer grupo. Si la segunda instancia es clasificada como el primer grupo, el nodo de salida representa el primer grupo activo convertido. Si l segunda instancia entrenada es clasificada como un nuevo grupo, un nodo de salida adicional es sumado a la red, y así sucesivamente, hasta que todas las instancias son clasificadas.
Para ejecutar la clasificación en AHA, una función de diff(X,C) es definida, llamada el grado de diferencia, representando la diferencia entre una instancia entrenada X y un grupo C en un red NN(M, P) (P indica el número de nodos de salida o equivalentemente el número de clases). Esta función mapea dos vectores dados (X y C) a un número real (diff). Los patrones de cada grupo (el más pequeño de la instancia en el grupo) son almacenados en los pesos de la red durante el proceso de clasificación. El siguiente procedimiento para clasificar una instancia entrenada dentro de un activo o nuevo grupo es usado en AHA:
Paso 1. Calcula el grado de diferencia, diff(X, Ci), entre la instancia entrenada, X, y cada grupo Ci, Una distancia Euclidean es usada (en aplicaciones de reconocimiento de imagen) y la función de diff(X, Ci) se convierte:
Paso 2: Encontrar el grado más pequeño de diferencia diffmin(X,Ci) y hacer el grupo con el más pequeño grado de diferencia de un grupo activo:
Paso 3: Comparar el valor de diffmin con un valor predefinido de umbral. Si el valor de la diffmin es más grande que el valor de umbral predefinido, la instancia entrenada es clasificada en un nuevo grupo.
∑=
=N
I
N XiN
X1
1
11
1
1+
++
+= NN X
NX
N
N
∑=
−=M
J
CijXjCiXdiff1
2)(),(
{ }{ }PiCiXdiffminCCactive ,...,2,1,),(| ==

Suponer que las N instancias entrenadas dadas han sido clasificadas dentro de un grupo P. Dejando de usar Cj para denotar los grupos jth y usando U para denotar el conjunto de todos los grupos. Si los grupos son completamente desarticulados cada instancia en el conjunto de entrenamiento constituye solo para uno de los grupos clasificados y una matriz Z binaria que puede ser usada para guardar los grupos de cada instancia. Si la instancia i convierte al grupo j nuestros tenemos Zij = 1, mientras si no constituye nosotros tenemos Zij =0. Si los grupos clasificados están en parte traslapado, una instancia dada en el conjunto de entrenamiento puede relacionarse con más grupos. Por lo tanto los limites de los grupos clasificados son más bien difusos que rápidos. La matriz binaria Z puede ser usada para recordar los grupos de cada instancia, el prototipo de cada grupo es definido como el significado de todas las instancias en ese grupo y el grado de membresía de cada instancia en cada grupo es basado sobre como simular esta instancia es el prototipo de una. La similitud puede ser definida como una función de distancia entre la instancia y el prototipo de los grupos. Si hay n instancias en un grupo p, el vector patrón de las ith instancias en el grupo p es Xipn =.[Xip, xi2p,...,xiMp] Entonces el vector del prototipo de instancias en el grupo es definido como
Donde, usando funciones de membresía de forma triangular los valores difusos de las funciones de membresía de los ith instancias en el p grupo es definido como
Donde un predefinido umbral valor k es usado como un valor pasadero. La función similiar es definida como los pesos normales Dw(Xip Cp. Entonces las normas en el AHA es definida como una distancia Euclidean
En reconocimiento de imagen, un valor de 1 es usado para los pesos de los parámetros w y wp. Si la distancia Eculcidean para una instancia dada es menos que el valor de X, la instancia pertenece al grupo p para un grado dado por el valor de membresía.
Redes neuronales manejando razonamiento difuso.
En los sistemas difusos que emplean más de tres o cuatro variables, puede dificultar en formular las reglas if/then, y podría ser atractivo si ellos podrían extraer automáticamente fuera de los datos del sistema físico siendo modelado. El problema de inducción (extracción) de reglas difusas ha sido manejado por algunos investigadores y ha habido una investigación intensa. En un importante publicación en 1991, Atsushita Electric ingenieros Tagaki y Hayashi presenta un acercamiento comprensivo para la inducción y ajuste de las reglas difusas, sabemos como las redes neuronales manejan razonamiento difuso o el método Tahagi.-Hayashi (T-H).
Considerando esta situación mostraremos la figura donde nosotros tenemos un espacio de datos de dos entradas X1 y X2, se conoce el objetivo o la salida deseada, y una partición no lineal de este espacio en tres regiones. Estas regiones corresponden a tres reglas if/then difusas. Las reglas R1, R2 y R3 son una variedad el tipo Sugeno, que es, sus consecuencia es una mapeo funcional de las variables antecedentes, con el mapeo actualmente siendo ejecutado por entrenamiento especificado ce redes neuronales. El Metofdo Takagi-Hayashi consiste en tres partes:
Parte 1: Partición del control o decisión sobre la superficie dentro de un número de reglas
{ }P1,2,...,iCi), diff(X,min k if =<= XCnew
∑=
==np
i
PMpp Xipnp
CCCCp´
1
211
],...,,[
)],([)( CpXDfXipp piw=µ
∑=
−==M
J
Pij
WPi
Pi
w CpjXCpXWpCpXD1
2)(,(),(

Parte 2: Identifica un reglas das LHS (antecedente) valores (por ejemplo determinar la función de membresía)Parte 3 Identifica un número de reglas dadas RHS (consecuentes) valores .
Parte 1 determina el número de reglas de inferencia difusa a través de agrupaciones ejecutado sobre los datos Parte 2 emplea una red neuronal para derivar las funciones de membresia para cada regla. El método T-H combina todas las variables en el LHS y esta basado en resultados teóricos de una función continua arbitraria, y es equivalente a una red neuronal que contiene al menos una capa culta.Buckley y Hayashi han mostrado la equivalencia computacional entre funciones continuas, redes neuronales regulares, controles difusos y sistemas expertos difusos discretos y han mostrado como construir redes neuronales numéricamente idénticas para un control difusos o un sistema experto difuso discreto. Parte 3 del método T-H determina la parte RHS usando redes neuronales con aprendizaje supervisado
Las reglas de tipo Sugeno son usadas donde las salidas es una función de las entradas. Las reglas de Sugeno son de la forma:
If x1 es A1 AND x es A2 ,..., entonces y = F(x,...,xn)
Donde f es la función de las entradas X1,...Xn. En el método T-H esta función ha sido reemplazada por una red neuronal, por ejemplo la reglas podría se la forma:
If (X1, X2) es As entonces ys = NNs(X1, X2)
Donde x = (X1, X2) es el vector de entradas y ys = NN(X1, x2) es la red neuronal que determina la salida ys de la sth regla As . Es la función de membresia del antecendente de la sth regla.
Algoritmo T-H
Un diagrama a bloques del método Takagi-Hayashi utiliza varias redes neuronales. La red neuronal NNmem es responsable de generar las funciones de membresía de los antecedentes (función LHS)de las reglas mientras que las redes NN1, NN2, ..., NNr, determinan las partes consecuentes (función RHS) de las reglas de Sugeno. En aplicaciones actuales estas son redes tri-capa entrenadas por back-propagation.
Los siguientes ocho pasos constituyen el proceso utilizado en el método Takagi-Hayashi.
Paso 1. Definimos yi como la salida y xj, j=1,2,...,k, como las variables de entrada. Las entradas xj j=1,2,...k que están
vinculadas con el valor observado a la salida son seleccionadas por una red neuronal a través de un método de eliminación hacia atrás (backward) usando la suma del cuadrado de error como una función con el propósito de eliminar variables de entrada atribuidas al ruido.
Paso 2. La población entrada-salida n es dividido dentro de los datos de entrenamiento (TRD de nt) y los datos de
chequeo (CHD de nc) donde:
Paso 3. La TRD es particionada en r grupos usando un método de categorización. Cada partición es etiquetada como
Rs, s=1,2,...,r.
Paso 4. La parte de antecedentes de cada regla es identificada a través de NNmem. Si xi son los valores de la capa de
entrada de NNmem, los pesos Wi s son asignados como los datos supervisados para la capa de salida, donde:
wis = { 1, xi Î R
s y 0, xi Î Rs
ct nnn +=

La red Nnmem es entrenada para inferir pesos Wi s dado un vector de entrada x. NNmem por lo tanto debe de ser capaz
de calcular el grado de membresía wi s ^ de cada dato de entrenamiento xi o partición Rs. La función de membresía del
antecedente As de la sentesima regla es definida como el valor wi s ^ que es, la salida de NNmem.
Paso 5. Identificaremos ahora el consecuente de la fusificación Sugeno, es decir, las reglas if/then. Los datos de entrenamiento son usados como pares entrda-salida para el entrenamiento de la red neuronal NNs que modela el
consecuente de la sentesima regla. Los datos de chequeo xi1, xi2,...xim i=1,2..nc son usadas como entradas y la suma
del cuadrado de errores forma:
Donde: us(xi) es la salida calculada de NNs
Yi es el objetivo de salida para la red
Qms es la suma del cuadrado de los errores
Paso 6. En este paso de modo arbitrario, un número de variables pueden ser eliminadas desde el consecuente através de un método de eliminación hacia atrás, con el proposito de eliminar variables de entrada atribuidas al ruido.
Paso 7. Las operaciones en el paso 6 pueden ser transportadas para permanecer m-1 variables de entrada hasta que la
condición Qms > Qm-1
sp sea cierta para alguno de los valores restantes.
Paso 8. La siguiente ecuación da el valor final de control yi*
.
Como se puede notar el método T-H pertenece a una partición no lineal de las funciones de membresía. Cada categoría de los datos de entrada corresponden a un tipo de reglas Sugeno if/then. Aunque estas reglas individualmente hacen un buen acoplamiento para los datos similares que deben ser entrenados, debe llevarse a cabo un acoplamiento gradual de múltiples reglas para acercar los datos a la región de frontera.
Ejemplos
Desarrollo de sensores virtuales basados en redes neuronales y lógica difusa orientado a la simulación y control de procesos
( ) ( ) 2][ is
isism xAxuy µ•−=Θ ∑
( ) ( )[ ]
( )∑
∑
=
=
•= r
si
s
r
sisi
s
i
xA
xuxAy
1
1inf
µ
µ

Resumen:
La motivación para esta propuesta de desarrollo nace hacia fines del año 1996 cuando se introduce una interesante actividad colateral en el área de control automático dentro del proyecto de Uso Racional de la Energía que el INTI a través del CIPURE llevaba a cabo con la agencia de cooperación internacional del Japón JICA desde el año 1995.
En tal sentido se comienza por recibir la visita de expertos Ing. K. Furuya e Ing M. Watanabe del área de control de procesos de la empresa Yokogawa Electric Co. de Japón que a través de diversos cursos efectúan una puesta al día en el estado del arte en la vasta y esencial área del control automático de procesos, desde el uso de controladores convencionales hasta las aplicación de sistemas de control multivariable predictivo y los sistemas de control inteligente basados en sistemas expertos ,´fuzzy logic´ y redes neuronales.
En septiembre de 1997 se visita el centro de capacitación técnica de la empresa Yokogawa dirigido por el Ing. M. Watanabe, comenzando con él, un trabajo de identificación y modelado de datos provenientes de una planta de destilación de petróleo con el objeto del diseño de un controlador multivariable predictivo. En septiembre de 1998 la visita de los expertos de control de procesos de refinerías de petróleo , Ing K. Nakai y Ing Aizawa nos traen entre otras valiosas experiencias de intercambio tecnológico la evidencia de la importancia que se le está dando en los países avanzados a las tecnologías de control inteligente.Y la explicación es que esas tecnologías avanzadas permiten alcanzar objetivos tales como:
• Ahorro energético
• Control de calidad
• Mayor productividad
Proyectos concernientes a la utilización de redes neuronales en la forma de ´soft sensors´ para modelizar algunas variables de proceso en función de otras mediciones cuando no se tiene un modelo o cuando tal modelo es casi imposible de formular, lo cual permite que tal enfoque pueda ser de interés interdisciplinario a ser utilizado por una vasta cantidad de aplicaciones.
Por ejemplo, en la empresa Idemitsu de Japón una de las aplicaciones de alto valor económico que usa tal tecnología es en el blending de naftas. Otros ejemplos incluyen el control de proceso de fermentación desarrollado en el MIT. Sin duda otras posibles, tal vez nuevas aplicaciones podrían ser el control de plantas de secado, la predicción de roturas de elementos de la construcción, o más generalmente en el mantenimiento predictivo de maquinarias, etc.
Las redes neuronales se diferencian de los sistemas expertos en que "aprenden" a partir de ejemplos usando algoritmos especiales, en lugar de a partir de reglas basadas en el conocimiento que un experto tendría que utilizar para resolver un problema. El usuario entrena a una red neuronal presentándole series de datos de entrada con sus correspondientes salidas. La red "aprende" la correlación entre las entradas y las salidas esperadas y es capaz no sólo de repetir estos ejemplos sino de establecer relaciones generales entre entradas y salidas que no se habían usado durante la fase del entrenamiento.
Por eso se puede pensar a la red neuronal como un interpolador "inteligente". Las redes han dejado de ser un tema de interés académico, sino que están fundamentando una sólida tecnología de aplicaciones a diversas áreas gracias a su buen comportamiento respecto al ruido; hay artículos que afirman que son superiores a los métodos estadísticos de regresión múltiple.
La lista de aplicaciones actuales de esta tecnología incluye:
• Simulación y control de procesos químicos
• Predicción del clima
• Control de calidad

• Identificación de polímeros y compuestos químicos
• Análisis de mercado (stocks,costos,precios)
• Modelización para programas de entrenamiento de operadores
• Mantenimiento preventivo: localización incipiente de fallos.
En general las técnicas llamadas de "Control Avanzado de Procesos" requieren del uso de modelos dinámicos del proceso. Esta es la parte esencial de la aplicación porque el controlador avanzado se especifica para que optimice una trayectoria deseada dentro de un "horizonte" de predicción. En cierto sentido el controlador es como un inverso del proceso. En el campo de los procesos químicos, en especial en petroquímica el gran número de variables involucradas, y también las reacciones químicas muy complejas hacen que habitualmente se utilicen métodos estadísticos para modelizar sus relaciones. El problema es que en regresión se tienen que postular la forma de las funciones que se usan para su ajuste. El enfoque de redes neuronales, por el contrario rescata relaciones no lineales sin basarse en otra cosa que los datos medidos de variables del proceso.

Otro ejemplo:
SISTEMA INTELIGENTE PARA EL CONTROL EN EL BOMBEO DE SANGRE DE UN MODELO DE CORAZON ARTIFICIAL BASADO EN SISTEMAS NEURODIFUSOS.
AdolfoCatral Sanabria, Arturo Coral FollecoUniversidad Distrital "FJC", Santafé de Bogotá; Université de Paris XII Val-de-Marne, France
ABSTRACT:
Una de las causas más frecuentes de mortalidad, en la mayoría de países, es la muerte por causas cardiacas, ya que esta se encuentra entre las cinco primeras causa de muerte de la población mundial, una de las soluciones es el reemplazo del corazón, por un mecanismo robótico autómata conocido como corazón artificial, aunque las estadísticas de eficiencia sobre los resultados de esta solución, demuestra que tiene muchos inconvenientes, uno de estos es la variabilidad del bombeo sanguíneo, traducido al ritmo cardiaco, es decir él numero de pulsaciones por minuto, la variabilidad es en esencia un problema, ya que el riego sanguíneo no es algo constante sino que varia ampliamente por condiciones del medio ambiente tales como actividad física, niveles emocionales, estados alimenticios y otros, por que segundo a segundo la exigencia de oxigeno es diferente en el cuerpo humano.
Tomando en cuenta esto, tenemos que el control convencional no ofrece la flexibilidad requerida debido a la no-linealidad de este comportamiento se propone la utilización de nuevos métodos para el modelamiento y desarrollo de un control que permita, una mejor adaptación a los requerimientos de oxigeno fluctuantes segundo a segundo, y así variar de forma eficiente el ritmo cardiaco de los que están provistos de un corazón artificial y hacerlo totalmente eficiente al cambio de las exigencias de oxigeno que se presentan.
Para lo cual el proyecto propone un sistema inteligente que sea capaz de adaptarse al cambio fluctuante, y que sea también capaz de inferir reglas de comportamiento, con esto realizar mejor su trabajo, entre mas tiempo lleve de ejecución el control.
Nos basaremos el sistema Modelo de Inferencia Difusa TSK (Takagi Sugeno Kang) Quien incorpora a la lógica difusa con las redes neuronales, teniendo así un conjunto de entradas, las cuáles son sometidos a un conjunto de reglas iteradas las cuales terminan dando, una única salida la cual resulta la mas optima para ese momento.
El modelo en simulaciones por computador ha tenido resultados, óptimos, dando deltas de error mucho menores que los sistemas, lineales o los sistemas basados en programas de fluctuación o simples sistemas multi-nivel.
En esto se encuentran, cuatro categorizaciones, la lineal, que pierde así deltas por curvatura con la de requerimientos, la basada en programas no todos los organismos tiene el mismo comportamiento y pierden eficiencia por desviación estándar, y los multinivel pierden por falta de amplitud de rangos y variación entre ellos.
Pero cuando el control se basa en el sistema adaptativo neurodifuso, los deltas por error tienden a cero y son muy cercanos a cero con el transcurrir de la ejecución de dicho control.
La importancia de este nuevo modelo salta a la vista por que además de su mayor eficiencia y eficacia con el control la implementación física dentro del mismo corazón artificial es muchísimo más fácil, por que necesita menos hardware que los demás.
La demanda comercial de este tipo de dispositivos es inmensa pensando que la población que requiere de los usos de un corazón artificial es también inmensamente grande, solo es revisar las estadísticas y darse cuenta la mortalidad por causas cardiacas

Desarrollo de Enseres Domésticos Mayores
DESARROLLO DE BANCOS DE PRUEBAS PARA LA INTRODUCCIÓN DE CONTROLES INTELIGENTES EN ELECTRODOMÉSTICOS.
En este proyecto se desarrolla un banco de pruebas que permita establecer relaciones entre las variables de operación en el ciclo de lavado. El banco opera con lógica difusa y redes neuronales. Esta misma tecnología se está realizando para un desarrollo similar en el proceso de refrigeración doméstica. El objetivo es que la empresa patrocinadora pueda manejar diferentes opciones de proceso para mejorar la tecnología de lavado (corros de burbujas, agitación múltiple, ultrasonido, etc.) combinándola con la capacidad de adaptación de los controles a los hábitos particulares del usuario y a las condiciones de operación propias del lugar donde se instala el aparato. De tal forma, que pueda el aparato interactuar de manera inteligente con el usuario y optimizar los insumos de agua y energía.

Desarrollo de Enseres Domésticos Mayores
Desarrollo de enceres domésticos mayores:

Máquina de inferencia difusa: