Metodolog´ıa para el Diseno e Implementaci˜ on de un ...
6
Metodolog´ ıa para el Dise˜ no e Implementaci´ on de un Sistema de Evaluaci´ on Ergon´ omica en tiempo real M.C Graciela Rodr´ ıguez Vega, Dr. Ulises Zald´ ıvar Colado, Dra. Xiomara Zald´ ıvar Colado Abstract— El presente art´ ıculo propone una metodolog´ ıa para el dise ˜ no de un sistema que permita determinar el nivel de riesgo ergon´ omico en estaciones de trabajo con actividades repetitivas. La evaluaci´ on de la tarea consistir´ a en el an´ alisis de los rangos de movimiento de las articulaciones del cuerpo tales como: mu ˜ neca, codo, hombro, cuello, torso, espalda, cadera, rodilla y tobillo, as´ ı como la duraci´ on y frecuencia de las posturas estresantes. Se aplicar´ an los criterios establecidos en los m´ etodos de evaluaci´ on ergon´ omica Rapid Entire Body Assessment (REBA) y la ecuaci´ on NIOSH. El m´ etodo REBA, incluye una penalizaci´ on para posturas con cambios repentinos, por lo que la velocidad del movimiento es un factor importante para la determinaci´ on del nivel de riesgo. Por otra parte, ambos m´ etodos incluyen penalizaciones en la determinaci´ on del nivel de riesgo, cuando el agarre del objeto es deficiente. La metodolog´ ıa propuesta considera la fusi´ on de datos de dos sistemas de captura de movimiento: un sistema conformado por tres sensores kinect, y un sistema integrado por seis sensores inerciales. A partir de la cinem´ atica directa, del peso de la carga manipulada, el tipo de agarre del objeto y la velocidad del movimiento, se obtendr´ a el ´ ındice de riesgo ergon´ omico. I. INTRODUCCI ´ ON El estudio del movimiento del cuerpo humano ha sido de gran inter´ es en disciplinas relacionadas con la medi- cina, rehabilitaci´ on y ergonom´ ıa, as´ ı como en el an´ alisis biomec´ anico de actividades art´ ısticas y deportivas, como la danza[1]. En el ´ ambito de la salud ocupacional, el estudio de los movimientos adoptados al realizar las actividades labo- rales, es de suma importancia. La combinaci´ on de posturas estresantes, esfuerzos excesivos y altas tasas de repetici´ on, es la causa principal de la ocurrencia de enfermedades laborales que afectan al sistema m´ usculo-esquel´ etico, tales como los des´ ordenes de trauma acumulado[2], mismas que inciden directamente en el funcionamiento ´ optimo de cualquier em- presa (altos ´ ındices de d´ ıas de incapacidad/a˜ no, incremento de primas del seguro social, as´ ı como disminuci´ on de la productividad)[3]. En la actualidad, existen diferentes m´ etodos para determi- nar el nivel de riesgo de ocurrencia de una lesi´ on m´ usculo- esquel´ etica debido a actividades laborales. Li y Buckle [4] clasifican los m´ etodos en las siguientes categor´ ıas: 1. M´ etodos basados en la percepci´ on del trabajador. 2. M´ etodos basados en la observaci´ on de expertos ana- listas. 3. M´ etodos basados en la medici´ on directa. El primer grupo de m´ etodos consiste en la consulta directa de la opini´ on del trabajador respecto a sus actividades laborales. Su principal desventaja es la ambigu¨ edad, debido a que la percepci´ on del trabajador debe ser interpretada por un analista, lo que ocasiona baja confiabilidad en el resultado[5]. En el segundo grupo, la medici´ on se realiza tomando en cuenta la experiencia del analista, as´ ı como la obtenci´ on de las caracter´ ısticas del movimiento (´ angulos de rotaci´ on de las articulaciones) a partir de im´ agenes (medici´ on est´ atica) obtenidas por medio de la filmaci´ on de un ciclo de traba- jo,siendo dificultad de medici´ on su prinicpal desventaja[4]. Los m´ etodos de medici´ on directa (tercer grupo), consisten en obtener informaci´ on a trav´ es de sensores colocados en el cuerpo del trabajador. Su principal desventaja, es su dif´ ıcil aplicaci´ on en situaciones reales de trabajo [5]. En los ´ ultimos a˜ nos, las t´ ecnicas de modelado digital del movimiento del cuerpo, como la captura de movimiento (MoCap), han sido empleadas en el an´ alisis biomec´ anico y la determinaci´ on del riesgo ergon´ omico. La retroalimen- taci´ on ergon´ omica en tiempo real, basada en captura de movimiento, disminuye los ´ ındices de riesgo de lesi´ on, al informar continuamente al trabajador de las posturas estre- santes adoptadas[6]. En el presente trabajo se propone una metodolog´ ıa para el dise˜ no e implementaci´ on de un sistema de evaluaci´ on ergon´ omica en tiempo real, basada en un sistema de sensores Kinect TM e inerciales. El sistema ser´ a capaz de determinar el nivel de riesgo de lesi´ on por actividades manuales repetitivas bajo las t´ ecnicas RULA y REBA. II. ANTECEDENTES Las t´ ecnicas de captura de movimiento se dividen en sistemas ´ opticos y no ´ opticos. Los primeros capturan los movimientos 3D por medio de c´ amaras y sensores de ima- gen, mientras que los sistemas no ´ opticos se colocan sobre los objetos para proporcionar la informaci´ on correspondiente a la orientaci´ on y desplazamiento. [7]. II-A. Sistemas basados en visi´ on Para realizar la captura de movimiento mediante sistemas ´ opticos, pueden emplearse sistemas basados en marcadores o sin marcadores [7]. En estos ´ ultimos, no es necesario que el sujeto porte alg´ un marcador para monitorear la trayectoria del movimiento. Los m´ etodos basados en marcadores han tenido gran popularidad a pesar de requerir un ambiente de iluminaci´ on controlado para la adquisici´ on de datos de alta calidad y del excesivo tiempo necesario para la colocaci´ on de los marcadores [4]. Los sistemas conformados por dis- positivos ´ opticos y sensores infrarrojos pueden capturar la profundidad en la que se localizan los objetos dentro de un ambiente, lo que permite determinar si un sujeto ha ingresado a un ´ area espec´ ıfica, o bien, si ha salido de ella [7].
Transcript of Metodolog´ıa para el Diseno e Implementaci˜ on de un ...
Metodologıa para el Diseno e Implementacion de un Sistema deEvaluacion Ergonomica en tiempo real
M.C Graciela Rodrıguez Vega, Dr. Ulises Zaldıvar Colado, Dra. Xiomara Zaldıvar Colado
Abstract— El presente artıculo propone una metodologıapara el diseno de un sistema que permita determinar el nivelde riesgo ergonomico en estaciones de trabajo con actividadesrepetitivas. La evaluacion de la tarea consistira en el analisis delos rangos de movimiento de las articulaciones del cuerpo talescomo: muneca, codo, hombro, cuello, torso, espalda, cadera,rodilla y tobillo, ası como la duracion y frecuencia de lasposturas estresantes. Se aplicaran los criterios establecidosen los metodos de evaluacion ergonomica Rapid Entire BodyAssessment (REBA) y la ecuacion NIOSH. El metodo REBA,incluye una penalizacion para posturas con cambios repentinos,por lo que la velocidad del movimiento es un factor importantepara la determinacion del nivel de riesgo. Por otra parte,ambos metodos incluyen penalizaciones en la determinaciondel nivel de riesgo, cuando el agarre del objeto es deficiente.La metodologıa propuesta considera la fusion de datos de dossistemas de captura de movimiento: un sistema conformado portres sensores kinect, y un sistema integrado por seis sensoresinerciales. A partir de la cinematica directa, del peso de lacarga manipulada, el tipo de agarre del objeto y la velocidaddel movimiento, se obtendra el ındice de riesgo ergonomico.
I. INTRODUCCION
El estudio del movimiento del cuerpo humano ha sidode gran interes en disciplinas relacionadas con la medi-cina, rehabilitacion y ergonomıa, ası como en el analisisbiomecanico de actividades artısticas y deportivas, como ladanza[1]. En el ambito de la salud ocupacional, el estudio delos movimientos adoptados al realizar las actividades labo-rales, es de suma importancia. La combinacion de posturasestresantes, esfuerzos excesivos y altas tasas de repeticion, esla causa principal de la ocurrencia de enfermedades laboralesque afectan al sistema musculo-esqueletico, tales como losdesordenes de trauma acumulado[2], mismas que incidendirectamente en el funcionamiento optimo de cualquier em-presa (altos ındices de dıas de incapacidad/ano, incrementode primas del seguro social, ası como disminucion de laproductividad)[3].
En la actualidad, existen diferentes metodos para determi-nar el nivel de riesgo de ocurrencia de una lesion musculo-esqueletica debido a actividades laborales. Li y Buckle [4]clasifican los metodos en las siguientes categorıas:
1. Metodos basados en la percepcion del trabajador.2. Metodos basados en la observacion de expertos ana-
listas.3. Metodos basados en la medicion directa.El primer grupo de metodos consiste en la consulta directa
de la opinion del trabajador respecto a sus actividadeslaborales. Su principal desventaja es la ambiguedad, debido aque la percepcion del trabajador debe ser interpretada por unanalista, lo que ocasiona baja confiabilidad en el resultado[5].
En el segundo grupo, la medicion se realiza tomando encuenta la experiencia del analista, ası como la obtencion delas caracterısticas del movimiento (angulos de rotacion delas articulaciones) a partir de imagenes (medicion estatica)obtenidas por medio de la filmacion de un ciclo de traba-jo,siendo dificultad de medicion su prinicpal desventaja[4].Los metodos de medicion directa (tercer grupo), consistenen obtener informacion a traves de sensores colocados en elcuerpo del trabajador. Su principal desventaja, es su difıcilaplicacion en situaciones reales de trabajo [5].
En los ultimos anos, las tecnicas de modelado digital delmovimiento del cuerpo, como la captura de movimiento(MoCap), han sido empleadas en el analisis biomecanicoy la determinacion del riesgo ergonomico. La retroalimen-tacion ergonomica en tiempo real, basada en captura demovimiento, disminuye los ındices de riesgo de lesion, alinformar continuamente al trabajador de las posturas estre-santes adoptadas[6].
En el presente trabajo se propone una metodologıa parael diseno e implementacion de un sistema de evaluacionergonomica en tiempo real, basada en un sistema de sensoresKinectTM e inerciales. El sistema sera capaz de determinar elnivel de riesgo de lesion por actividades manuales repetitivasbajo las tecnicas RULA y REBA.
II. ANTECEDENTES
Las tecnicas de captura de movimiento se dividen ensistemas opticos y no opticos. Los primeros capturan losmovimientos 3D por medio de camaras y sensores de ima-gen, mientras que los sistemas no opticos se colocan sobrelos objetos para proporcionar la informacion correspondientea la orientacion y desplazamiento. [7].
II-A. Sistemas basados en vision
Para realizar la captura de movimiento mediante sistemasopticos, pueden emplearse sistemas basados en marcadores osin marcadores [7]. En estos ultimos, no es necesario que elsujeto porte algun marcador para monitorear la trayectoriadel movimiento. Los metodos basados en marcadores hantenido gran popularidad a pesar de requerir un ambiente deiluminacion controlado para la adquisicion de datos de altacalidad y del excesivo tiempo necesario para la colocacionde los marcadores [4]. Los sistemas conformados por dis-positivos opticos y sensores infrarrojos pueden capturar laprofundidad en la que se localizan los objetos dentro de unambiente, lo que permite determinar si un sujeto ha ingresadoa un area especıfica, o bien, si ha salido de ella [7].
El error en la determinacion del riesgo ergonomico me-diante sistemas de vision depende directamente de la pos-tura evaluada, y se incrementa rapidamente conforme seincrementa la complejidad de la tarea y la saturacion delentorno de trabajo (debido a la gran cantidad de componentesrequeridos para llevar a cabo la actividad). Para evitar laoclusion,Plantard et.al. [9] propusieron una nueva estructurade datos llamada Filtered Pose Graph, que hace mas eficienteun grupo de posturas antes de la correcion, asegurando lacontinuidad y maximizando la confiabilidad cuando oclu-siones importantes ocurren. Esto mejora la velocidad decomputo y la calidad de la correccion.
En el trabajo presentado por Xu, Robertson et. al. [10],se empleo el sensor kinect para determinar la cinematicadel hombro durante el uso de computadoras. Los autoresconcluyeron que si el sensor se coloca de frente al sujetose obtienen mejores resultados que si se coloca a 15 o30 grados, ademas de que la estimacion es mejor para laflexion/extension de hombro en comparacion con la abduc-cion/aduccion de hombro.
Diego-Mas y Alcaide-Marzal [11] desarrollaron una apli-cacion para el procesamiento de los datos provistos por elsensor kinect y compararon los resultados con los obtenidospor el metodo OWAS. Los investigadores concluyeron queKinect puede ser un buen sistema de rastreo del esqueletocuando se encuentra posicionado justo en frente del sujeto,o bien, dentro de un rango de ±40 grados, en cualquierotro caso su confiabilidad disminuye considerablemente. Enescenarios reales, es comun encontrar objetos que obstruyenla visibilidad de las articulaciones por parte del sensor, obien, el trabajador asume posturas en las que es difıcil parala camara detectar ciertas partes del cuerpo.
Wei, Chang y Chai [12], senalan que el rastreo 3D y ladeteccion de posturas 3D se complementan en el procesode reconstruccion de posturas 3D. Emplearon una camara deprofundidad y realizaron la reconstruccion de todas las postu-ras, excepto de las que requieren inicializacion y que surgenpor la interrupcion de la captura de los marcos, mismas queson inicializadas o reestablecidas mediante la deteccion deposturas de manera automatica. Los resultados indican queel 0.46% del total de marcos fue reinicializado mediante eldetector 3D mientras que el resto fue reconstruıdo por elrastreo 3D.
Moon, Park et.al. [13] senalan que para resolver los pro-blemas ocasionados por la auto-oclusion del sensor kinect,se requiere emplear multiples camaras de manera simultanea,de tal forma que los datos que no se pueden leer a traves deun sensor, sean proporcionados por otro. Para la fusion dedatos es necesario estimar la confiabilidad de cada mediciony combinar multiples observaciones.
II-B. Sistemas basados en sensores inerciales
Los sistemas inerciales (no opticos), conformados por unconjunto de sensores sujetos al cuerpo, proveen medicionesespaciales y temporales. El diseno de un sistema portable,que optimice el numero de sensores, representa ciertas ven-tajas: 1) mayor facilidad de uso, a traves de la reduccion del
tiempo deajuste del sistema al cuerpo, ası como disminuciondificultad para el desplazamiento del individuo y del pesototal del sistema, y 2) disminucion del consumo de energıay el uso de memoria del sistema, mejorando la integracionfisica de los sensores e incrementando la confiabilidad delsistema [8]. La principal desventaja de los sistemas decaptura de movimiento basados en sensores inerciales ymagneticos es que, en ocasiones, pueden ser incompatiblescon los lineamientos de seguridad de las empresas y puedenser pertubados por el ambiente electromagnetico [9].
En el trabajo realizado por Tao, Sun et.al[14], se pre-sento el diseno un sistema conformado por sensores iner-ciales para modelar el cuerpo humano de 45 grados delibertad, incluyendo 6 grados para la orientacion y traslaciondel cuerpo en un marco de referencia global. Se utilizo unmodelo cinematico jerarquico, en el que los eslabones tienenuna relacion padre-hijo. La pelvis, como centro de gravedaddel cuerpo, fue considerado la raız de las cinco cadenascinematicas analizadas. El sistema requiere de calibracioninicial, en la que se ajusta la estatura del individuo, yposteriormente las dimensiones de los eslabones y el anchode hombros son capturados en el sistema. El modelo decinematica directa es obtenido mediante quaterniones.
III. METODOS DE EVALUACION ERGONOMICA
La determinacion del nivel de riesgo ergonomico queconlleva una actividad laboral, es de suma importancia enel sector productivo. A traves de ella, se puede identificarlos puestos de trabajo que representan un riesgo para lasalud del trabajador y que pueden incidir directamente enla productividad de la empresa. Existen diferentes metodospara la determinacion del nivel de riesgo ergonomico. Dentrode los metodos basados en la observacion directa de la acti-vidad, los mas utilizados son Rapid Entire Body Assessment(REBA), que proporciona el nivel de riesgo de lesion a travesdel analisis postural, y la ecuacion NIOSH 1991 (NationalInstitute of Occupational Safety and Health) para el analisisbiomecanico debido a actividades de levantamientos.
La evaluacion ergonomica mediante REBA, implica alanalisis de la postura mas estresante en un ciclo de trabajo,es decir, previo a la evaluacion se determina la posturaadoptada por el trabajador mas alejada de las condicionesideales del movimiento (ver fig 1)[15]. La postura anatomicarecomendada es de pie o sedente, con los codos flexionados a90 grados, para actividades que no requieren de un alto nivelde detalle, dentro del plano sagital. Una vez seleccionada lapostura, se realiza el analisis del rango del movimimiento(ROM) para cada articulacion considerada en el metodo. Elanalisis del ROM, se efectua en dos secciones: 1) cabeza,torso y piernas, y 2) hombro, brazo, muneca. En esta ultimaseccion, se incluye la variable tipo de agarre, misma queesta en funcion del control del objeto que se realice (grado deflexion de dedos). Posteriormente,los ındices obtenidos delanalisis de los grupos A y B, a partir de tablas de referencia,se emplean para determinar el ındice C, que representa elnivel de riesgo de lesion por carga postural. Al final, seincluye una penalizacion por esfuerzos sostenidos (duracion
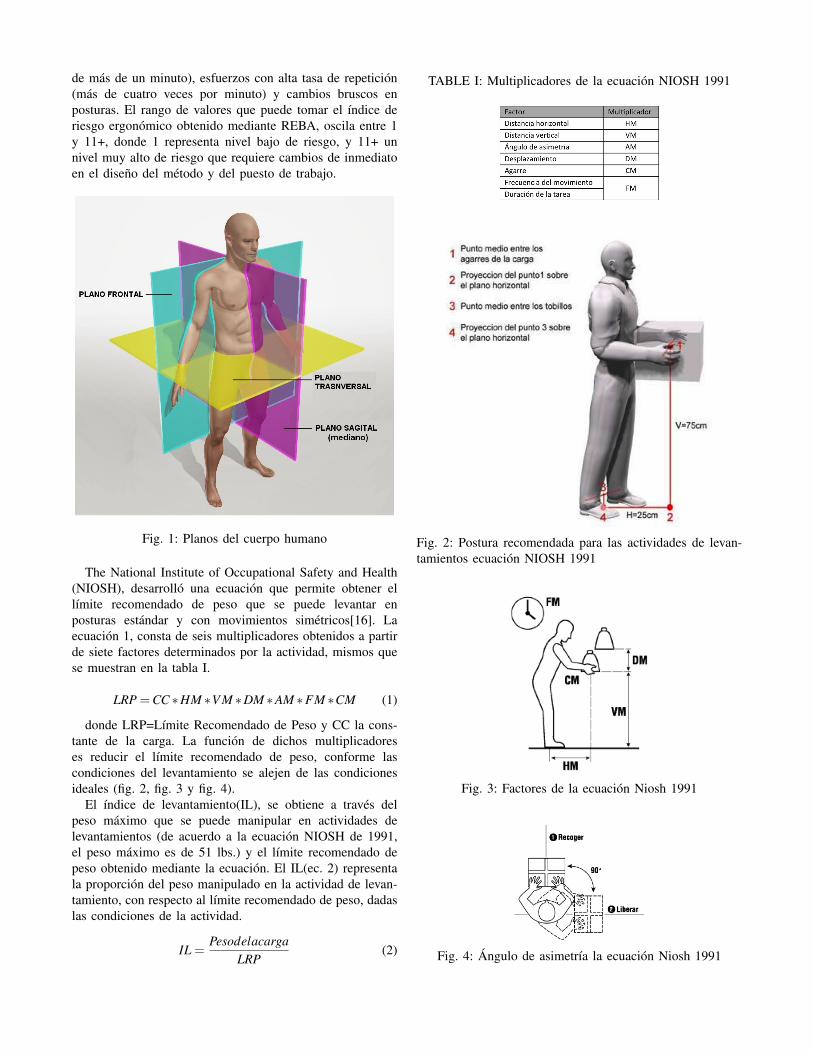
de mas de un minuto), esfuerzos con alta tasa de repeticion(mas de cuatro veces por minuto) y cambios bruscos enposturas. El rango de valores que puede tomar el ındice deriesgo ergonomico obtenido mediante REBA, oscila entre 1y 11+, donde 1 representa nivel bajo de riesgo, y 11+ unnivel muy alto de riesgo que requiere cambios de inmediatoen el diseno del metodo y del puesto de trabajo.
Fig. 1: Planos del cuerpo humano
The National Institute of Occupational Safety and Health(NIOSH), desarrollo una ecuacion que permite obtener ellımite recomendado de peso que se puede levantar enposturas estandar y con movimientos simetricos[16]. Laecuacion 1, consta de seis multiplicadores obtenidos a partirde siete factores determinados por la actividad, mismos quese muestran en la tabla I.
LRP =CC ∗HM ∗V M ∗DM ∗AM ∗FM ∗CM (1)
donde LRP=Lımite Recomendado de Peso y CC la cons-tante de la carga. La funcion de dichos multiplicadoreses reducir el lımite recomendado de peso, conforme lascondiciones del levantamiento se alejen de las condicionesideales (fig. 2, fig. 3 y fig. 4).
El ındice de levantamiento(IL), se obtiene a traves delpeso maximo que se puede manipular en actividades delevantamientos (de acuerdo a la ecuacion NIOSH de 1991,el peso maximo es de 51 lbs.) y el lımite recomendado depeso obtenido mediante la ecuacion. El IL(ec. 2) representala proporcion del peso manipulado en la actividad de levan-tamiento, con respecto al lımite recomendado de peso, dadaslas condiciones de la actividad.
IL =Pesodelacarga
LRP(2)
TABLE I: Multiplicadores de la ecuacion NIOSH 1991
Fig. 2: Postura recomendada para las actividades de levan-tamientos ecuacion NIOSH 1991
Fig. 3: Factores de la ecuacion Niosh 1991
Fig. 4: Angulo de asimetrıa la ecuacion Niosh 1991
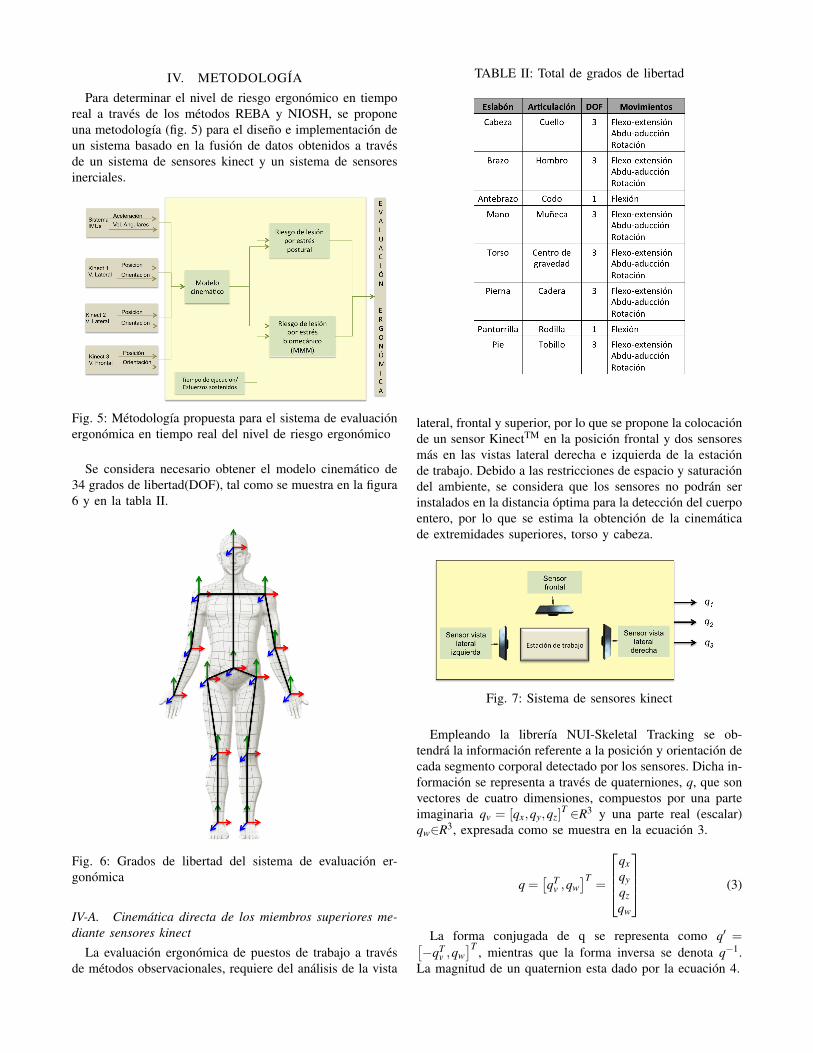
IV. METODOLOGIAPara determinar el nivel de riesgo ergonomico en tiempo
real a traves de los metodos REBA y NIOSH, se proponeuna metodologıa (fig. 5) para el diseno e implementacion deun sistema basado en la fusion de datos obtenidos a travesde un sistema de sensores kinect y un sistema de sensoresinerciales.
Fig. 5: Metodologıa propuesta para el sistema de evaluacionergonomica en tiempo real del nivel de riesgo ergonomico
Se considera necesario obtener el modelo cinematico de34 grados de libertad(DOF), tal como se muestra en la figura6 y en la tabla II.
Fig. 6: Grados de libertad del sistema de evaluacion er-gonomica
IV-A. Cinematica directa de los miembros superiores me-diante sensores kinect
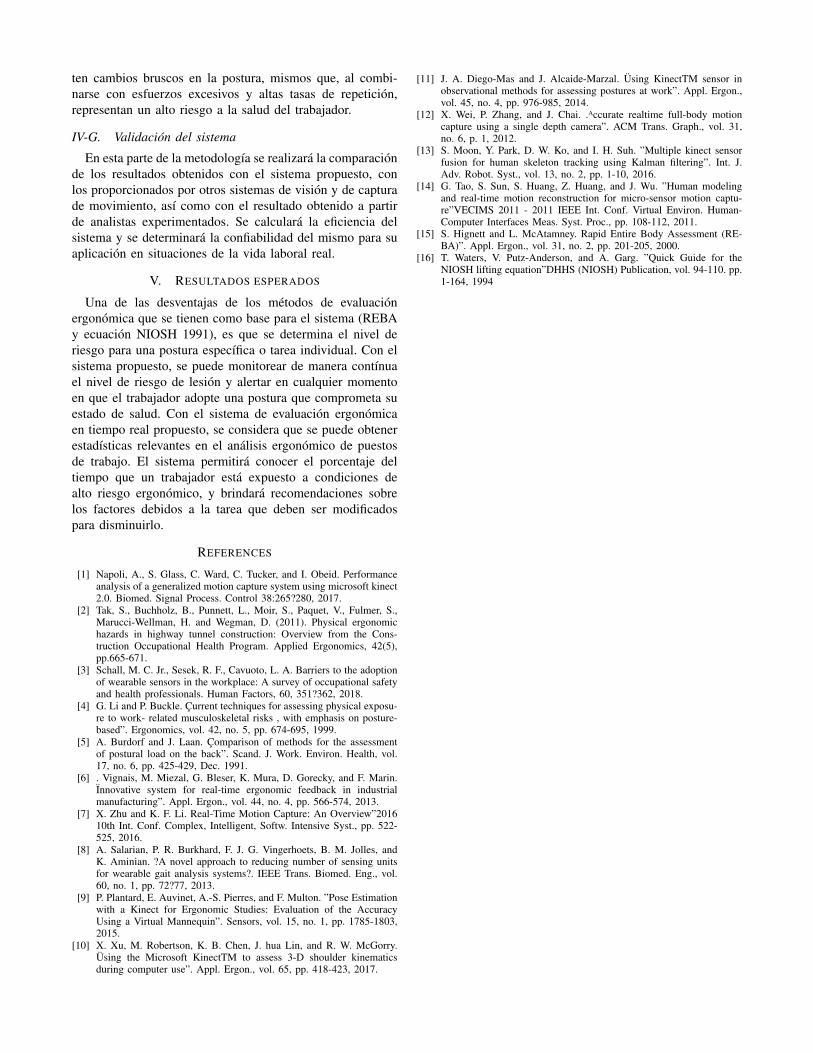
La evaluacion ergonomica de puestos de trabajo a travesde metodos observacionales, requiere del analisis de la vista
TABLE II: Total de grados de libertad
lateral, frontal y superior, por lo que se propone la colocacionde un sensor KinectTM en la posicion frontal y dos sensoresmas en las vistas lateral derecha e izquierda de la estacionde trabajo. Debido a las restricciones de espacio y saturaciondel ambiente, se considera que los sensores no podran serinstalados en la distancia optima para la deteccion del cuerpoentero, por lo que se estima la obtencion de la cinematicade extremidades superiores, torso y cabeza.
Fig. 7: Sistema de sensores kinect
Empleando la librerıa NUI-Skeletal Tracking se ob-tendra la informacion referente a la posicion y orientacion decada segmento corporal detectado por los sensores. Dicha in-formacion se representa a traves de quaterniones, q, que sonvectores de cuatro dimensiones, compuestos por una parteimaginaria qv = [qx,qy,qz]
T ∈R3 y una parte real (escalar)qw∈R3, expresada como se muestra en la ecuacion 3.
q =[qT
v ,qw]T
=
qxqyqzqw
(3)
La forma conjugada de q se representa como q′ =[−qT
v ,qw]T , mientras que la forma inversa se denota q−1.
La magnitud de un quaternion esta dado por la ecuacion 4.

‖ q ‖=√
q2x +q2
y +q2z +q2
w (4)
Cualquier rotacion se representa mediante un quaternionunitario q, de tal forma que ‖q‖ = 1. cualquier punto enel espacio R3 puede ser rotado sobre un eje arbitrario. Unpunto P [x,y,x] puede ser rotado en un angulo β mediante laecuacion 5.
Protated = q∗P∗q−1 (5)
donde q =[qT
v ,qw]T , y qw = cos
(β
2
)y qv = µsin
(β
2
)IV-B. Integracion de la informacion extraıda de los senso-res kinect
Desarrollar un algoritmo para combinar la informacionproveniente de los tres sensores kinect, y con ello obtenerla cinematica directa de los 20 grados de libertad correspon-dientes a la parte superior del cuerpo, tal como se muestraen la figura 6. De igual manera, es necesario obtener lacinematica de la mano y dedos, para determinar el tipo deagarre.
IV-C. Modelo cinematico de miembros superiores
En esta parte de la metodologıa, se propone realizar laconversion de quaterniones de referencia a angulos de Eulery mediante tecnicas de diferenciacion e integracion, obtenerel modelo cinematico que incluya posicion, velocidad yaceleracion lineal y angular.
La transformacion de quaterniones a angulos euler, depen-de del orden en el que se realicen las rotaciones. Si el ordende las rotaciones es pitch, yaw y finalmente row, los anguloseuler estarıan dados por las ecuaciones 6, 7 y 8.
α = arctang(
a(ab+ cd)a2−b2− c2 +d2
)(6)
β =−arcsin(2(bd−ac)) (7)
θ = arctang(
2(ad +bc)a2 +b2− c2−d2
)(8)
IV-D. Sistema de sensores inerciales para miembros infe-riores
Para obtener la cinematica de los miembros inferiores,es necesario conformar el sistema de sensores inerciales ydesarrollar el algoritmo que, mediante tecnicas de integraciony diferenciacion, permita obtener la posicion, orientacion,velocidad y aceleracion lineal y angular. Se colocaran 3sensores inerciales modelo MPU6050 de 6 DOF, en cadauno de los eslabones de las extremidades inferiores (pierna,pantorrilla y pie). Los sensores cuentan con un giroscopiode tres ejes con el que se puede medir la velocidad angular,ası como con un acelerometro tambien de tres ejes, que midelas componenes x, y y z de la aceleracion (Fig. 8).
Fig. 8: Sistema de sensores inerciales para miembros infe-riores
IV-E. Integrar los datos para el sistema de sensores kinecty el sistema de sensores inerciales
Es necesario realizar la fusion de datos obtenidos mediantelos sistemas de captura de movimiento que conforman alsistema de evaluacion ergonomica, para lo cual se requieredesarrollar un algoritmo que calcule la cinematica directa delos 34 grados de libertad requeridos para la descripcion delmovimiento.
IV-F. Algoritmo para la determinacion del nivel de riesgoergonomico
Una vez obtenida la cinematica de la actividad, es ne-cesario determinar la duracion de la postura, ası como sufrecuencia en un ciclo de trabajo. Ademas, se requiere con-siderar el peso de las cargas manipuladas durante la actividadanalizada. Finalmente, se obtiene el ındice de riesgo a travesde los dos metodos de evaluacion considerados (REBA yNIOSH). Para establecer el valor asignado tanto por elmetodo REBA como por NIOSH, el criterio de agarre delobjeto, requiere de la identificacion de los grados de libertadrelacionados al movimiento de la mano y los dedos, tal comose muestra en las figura 9.
Fig. 9: Determinacion del tipo de agarre
La velocidad del movimiento permitira determinar si exis-
ten cambios bruscos en la postura, mismos que, al combi-narse con esfuerzos excesivos y altas tasas de repeticion,representan un alto riesgo a la salud del trabajador.
IV-G. Validacion del sistema
En esta parte de la metodologıa se realizara la comparacionde los resultados obtenidos con el sistema propuesto, conlos proporcionados por otros sistemas de vision y de capturade movimiento, ası como con el resultado obtenido a partirde analistas experimentados. Se calculara la eficiencia delsistema y se determinara la confiabilidad del mismo para suaplicacion en situaciones de la vida laboral real.
V. RESULTADOS ESPERADOS
Una de las desventajas de los metodos de evaluacionergonomica que se tienen como base para el sistema (REBAy ecuacion NIOSH 1991), es que se determina el nivel deriesgo para una postura especıfica o tarea individual. Con elsistema propuesto, se puede monitorear de manera contınuael nivel de riesgo de lesion y alertar en cualquier momentoen que el trabajador adopte una postura que comprometa suestado de salud. Con el sistema de evaluacion ergonomicaen tiempo real propuesto, se considera que se puede obtenerestadısticas relevantes en el analisis ergonomico de puestosde trabajo. El sistema permitira conocer el porcentaje deltiempo que un trabajador esta expuesto a condiciones dealto riesgo ergonomico, y brindara recomendaciones sobrelos factores debidos a la tarea que deben ser modificadospara disminuirlo.
REFERENCES
[1] Napoli, A., S. Glass, C. Ward, C. Tucker, and I. Obeid. Performanceanalysis of a generalized motion capture system using microsoft kinect2.0. Biomed. Signal Process. Control 38:265?280, 2017.
[2] Tak, S., Buchholz, B., Punnett, L., Moir, S., Paquet, V., Fulmer, S.,Marucci-Wellman, H. and Wegman, D. (2011). Physical ergonomichazards in highway tunnel construction: Overview from the Cons-truction Occupational Health Program. Applied Ergonomics, 42(5),pp.665-671.
[3] Schall, M. C. Jr., Sesek, R. F., Cavuoto, L. A. Barriers to the adoptionof wearable sensors in the workplace: A survey of occupational safetyand health professionals. Human Factors, 60, 351?362, 2018.
[4] G. Li and P. Buckle. Current techniques for assessing physical exposu-re to work- related musculoskeletal risks , with emphasis on posture-based”. Ergonomics, vol. 42, no. 5, pp. 674-695, 1999.
[5] A. Burdorf and J. Laan. Comparison of methods for the assessmentof postural load on the back”. Scand. J. Work. Environ. Health, vol.17, no. 6, pp. 425-429, Dec. 1991.
[6] . Vignais, M. Miezal, G. Bleser, K. Mura, D. Gorecky, and F. Marin.Innovative system for real-time ergonomic feedback in industrialmanufacturing”. Appl. Ergon., vol. 44, no. 4, pp. 566-574, 2013.
[7] X. Zhu and K. F. Li. Real-Time Motion Capture: An Overview”201610th Int. Conf. Complex, Intelligent, Softw. Intensive Syst., pp. 522-525, 2016.
[8] A. Salarian, P. R. Burkhard, F. J. G. Vingerhoets, B. M. Jolles, andK. Aminian. ?A novel approach to reducing number of sensing unitsfor wearable gait analysis systems?. IEEE Trans. Biomed. Eng., vol.60, no. 1, pp. 72?77, 2013.
[9] P. Plantard, E. Auvinet, A.-S. Pierres, and F. Multon. ”Pose Estimationwith a Kinect for Ergonomic Studies: Evaluation of the AccuracyUsing a Virtual Mannequin”. Sensors, vol. 15, no. 1, pp. 1785-1803,2015.
[10] X. Xu, M. Robertson, K. B. Chen, J. hua Lin, and R. W. McGorry.Using the Microsoft KinectTM to assess 3-D shoulder kinematicsduring computer use”. Appl. Ergon., vol. 65, pp. 418-423, 2017.
[11] J. A. Diego-Mas and J. Alcaide-Marzal. Using KinectTM sensor inobservational methods for assessing postures at work”. Appl. Ergon.,vol. 45, no. 4, pp. 976-985, 2014.
[12] X. Wei, P. Zhang, and J. Chai. .Accurate realtime full-body motioncapture using a single depth camera”. ACM Trans. Graph., vol. 31,no. 6, p. 1, 2012.
[13] S. Moon, Y. Park, D. W. Ko, and I. H. Suh. ”Multiple kinect sensorfusion for human skeleton tracking using Kalman filtering”. Int. J.Adv. Robot. Syst., vol. 13, no. 2, pp. 1-10, 2016.
[14] G. Tao, S. Sun, S. Huang, Z. Huang, and J. Wu. ”Human modelingand real-time motion reconstruction for micro-sensor motion captu-re”VECIMS 2011 - 2011 IEEE Int. Conf. Virtual Environ. Human-Computer Interfaces Meas. Syst. Proc., pp. 108-112, 2011.
[15] S. Hignett and L. McAtamney. Rapid Entire Body Assessment (RE-BA)”. Appl. Ergon., vol. 31, no. 2, pp. 201-205, 2000.
[16] T. Waters, V. Putz-Anderson, and A. Garg. ”Quick Guide for theNIOSH lifting equation”DHHS (NIOSH) Publication, vol. 94-110. pp.1-164, 1994