Manual de Pràctiques de Màquines Elèctriques en règim ...deeea.urv.cat/DEEEA/lguasch/AlbertCid...
164
Manual de Pràctiques de Màquines Elèctriques en règim dinàmic, Mitjançant PSIM AUTOR: Albert Cid Carbó DIRECTOR: Lluis Guasch Pesquer PONENT: Lluis Guasch Pesquer DATA 6 / 02
Transcript of Manual de Pràctiques de Màquines Elèctriques en règim ...deeea.urv.cat/DEEEA/lguasch/AlbertCid...

Manual de Pràctiques de Màquines Elèctriques enrègim dinàmic, Mitjançant PSIM
AUTOR: Albert Cid CarbóDIRECTOR: Lluis Guasch Pesquer
PONENT: Lluis Guasch PesquerDATA 6 / 02

MANUAL D’INICIACIÓ AL PSIM PER AELÈCTRICS
AUTOR: Albert Cid CarbóDIRECTOR: Lluis Guasch Pesquer
PONENT: Lluis Guasch PesquerDATA 6 / 02

ÍNDEX
1 INTRODUCCIÓ AL PSIM......................................................................................................................................... 11.1. SOFTWARE I HARDWARE NECESSARI....................................................................................................... 11.2. COM INSTAL·LAR EL PROGRAMA .............................................................................................................. 11.3 DESCRIPCIÓ DELS FITXERS DEL PROGRAMA........................................................................................... 21.4 CREACIÓ I SIMULACIÓ DE CIRCUITS.......................................................................................................... 21. 5 ALTRES PROGRAMES SIMILARS AL PSIM................................................................................................. 3
1.5.1 PSIM ............................................................................................................................................................. 31.5.2 PSPICE.......................................................................................................................................................... 31.5.3 CIRQUITMAKER ........................................................................................................................................ 31.5.4 COMMSIM ................................................................................................................................................... 31.5.5 CIRQUIT SHOP............................................................................................................................................ 41.5.6 MICRO-CAP................................................................................................................................................. 41.5.7 TARGET ....................................................................................................................................................... 41.5.8 ICAP.............................................................................................................................................................. 41.5.9 SPACE-IT ..................................................................................................................................................... 41.5.10 SPACE AGE ............................................................................................................................................... 41.5.11 SIMETRIX .................................................................................................................................................. 41.5.12 TOPSPICE .................................................................................................................................................. 41.5.13 TINA ........................................................................................................................................................... 51.5.14 VISUALSPICE ........................................................................................................................................... 5
2 LLISTAT DELS MENÚS PER A ELÈCTRICS......................................................................................................... 52.1 LLISTAT DELS MENÚS DEL SIMCAD........................................................................................................... 5
2.1.1 FILE .............................................................................................................................................................. 52.1.2 EDIT.............................................................................................................................................................. 62.1.3 VIEW ............................................................................................................................................................ 72.1.4 ELEMENTS .................................................................................................................................................. 7
2.1.4.1Conceptes generals .................................................................................................................................. 72.1.4.2 Elements passius..................................................................................................................................... 82.1.4.3 Transformadors..................................................................................................................................... 142.1.4.4 Elements de maniobra .......................................................................................................................... 222.1.4.5 Màquines motrius elèctriques i càrregues mecàniques ......................................................................... 342.1.4.6 Fonts de tensió...................................................................................................................................... 392.1.4.7 Sensors i aparells de mesura................................................................................................................. 432.1.4.8 Altres funcions importants del psim ..................................................................................................... 48
2.1.5 SIMULATE................................................................................................................................................. 492.1.6 OPTIONS .................................................................................................................................................... 492.1.7 WINDOW ................................................................................................................................................... 49
2.2 LLISTAT DELS MENÚS DEL SIMVIEW....................................................................................................... 502.2.1 File menu..................................................................................................................................................... 502.2.2 Edit menu .................................................................................................................................................... 502.2.3 Axis menu ................................................................................................................................................... 512.2.4 Screen menu ................................................................................................................................................ 512.2.5 Measure menu ............................................................................................................................................. 522.2.6 View menu .................................................................................................................................................. 532.2.7 Option menu................................................................................................................................................ 532.2.8 Label menu.................................................................................................................................................. 53
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 1 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
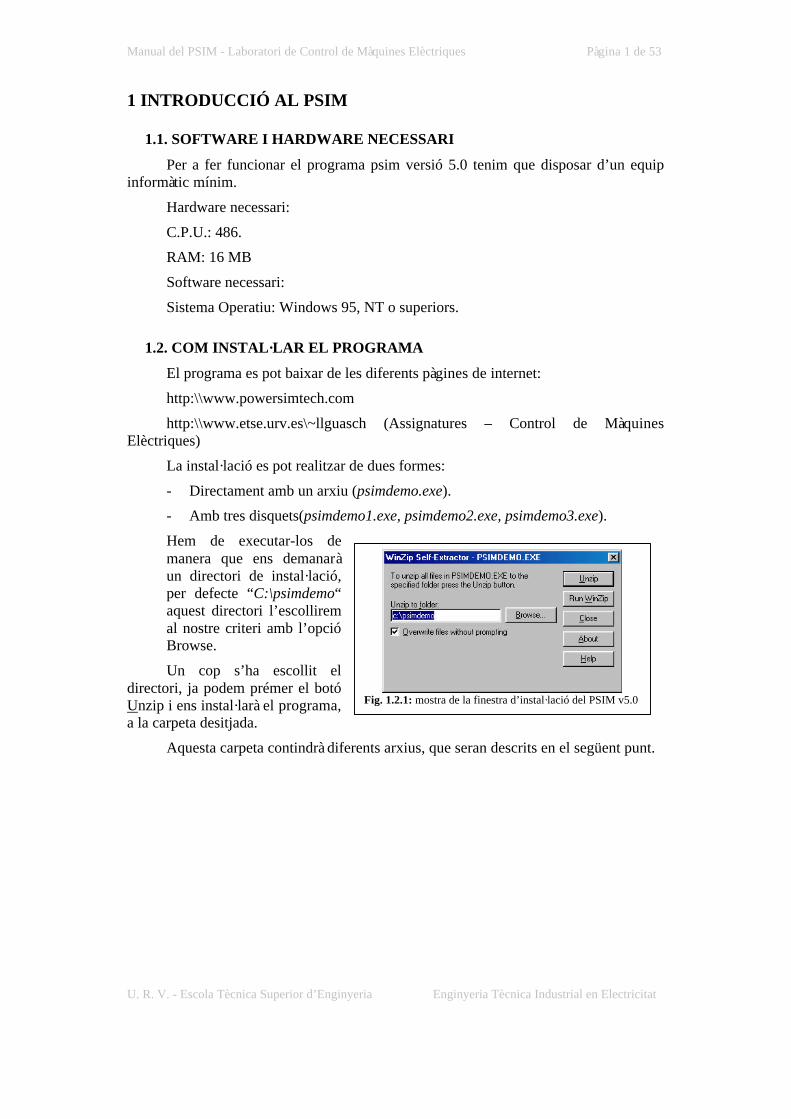
Fig. 1.2.1: mostra de la finestra d’instal·lació del PSIM v5.0
1 INTRODUCCIÓ AL PSIM
1.1. SOFTWARE I HARDWARE NECESSARI
Per a fer funcionar el programa psim versió 5.0 tenim que disposar d’un equipinformàtic mínim.
Hardware necessari:
C.P.U.: 486.
RAM: 16 MB
Software necessari:
Sistema Operatiu: Windows 95, NT o superiors.
1.2. COM INSTAL·LAR EL PROGRAMA
El programa es pot baixar de les diferents pàgines de internet:
http:\\www.powersimtech.com
http:\\www.etse.urv.es\~llguasch (Assignatures – Control de MàquinesElèctriques)
La instal·lació es pot realitzar de dues formes:
- Directament amb un arxiu (psimdemo.exe).
- Amb tres disquets(psimdemo1.exe, psimdemo2.exe, psimdemo3.exe).
Hem de executar-los demanera que ens demanaràun directori de instal·lació,per defecte “C:\psimdemo“aquest directori l’escolliremal nostre criteri amb l’opcióBrowse.
Un cop s’ha escollit eldirectori, ja podem prémer el botóUnzip i ens instal·larà el programa,a la carpeta desitjada.
Aquesta carpeta contindrà diferents arxius, que seran descrits en el següent punt.

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 2 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 1.3.1: Matriu de transmissió de duesbobines acoblades.
1.3 DESCRIPCIÓ DELS FITXERS DEL PROGRAMA
Aquests són els diferents arxius descompresos i la seva funció.
Simcad.exe: és el programa que s’utilitza per a dibuixar els esquemes elèctricsque volem analitzar.
Psim.exe: és el programa responsablede efectuar els càlculs, depenent dels aparellsque hi fiquem al esquema.
Simview.exe: programa que ens serveixper a veure els comportament que tindran elsdiferents elements del esquema en regimdinàmic.
Simcad.lib: llibreria on hi són el comportament matemàtic de tots els elementsque es poden incloure als circuits, per exemple, un acoblament de dues bobines seriauna matriu de 2x2 (figura 1.3.1)
*.hlp: la terminació dels arxius en “hlp” indica que és un fitxer d’ajuda, on hi vanexplicats els diferents elements i la seva funció.
*.sch: aquesta terminació indica que és un fitxer del SIMCAD, és a dir, unesquema elèctric realitzat amb el programa anteriorment esmentat.
*.txt: són fitxers on podem guardar els resultats del esquema, amb aquest fitxer,que en un principi el crea el PSIM, el podem analitzar amb el SIMVIEW. Però noobstant, també el podem obrir amb una fulla de càlcul, com ara el EXCEL, el fitxer estàescrit amb codi ASCII.
*.smv: és exactament igual que l’anterior però els resultats estan escrits en binari.
1.4 CREACIÓ I SIMULACIÓ DE CIRCUITS
El PSIM no és un programa que funcioni tot sol, si no el conjunt de tresprogrames que es complementen (SIMCAD, PSIM i SIMVIEW). Amb la combinaciódels tres, hom es capaç de crear i analitzar gairebé qualsevol circuit elèctric.
Per a començar a treballar amb el programa s’han de seguir els següents passos:
1er. Buscar la carpeta on hem instal·lat el PSIM i busquem el arxiu simcad.exeper tal de executar-lo amb un doble clic.
2on. Un cop s’ha executat el programa ja es pot crear un document nou o obrir-neun que s’hagi creat en anterioritat (podem guardar el esquema amb un arxiu d’extensió*.sch).
3er. Quan haguem acabat de fer el circuit pitgem el PSIM (figura 1.3.1) per a quefaci les operacions pertinents(el resultat es guarda amb un arxiu amb el mateix nom delesquema i amb la extensió *.txt).
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 3 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
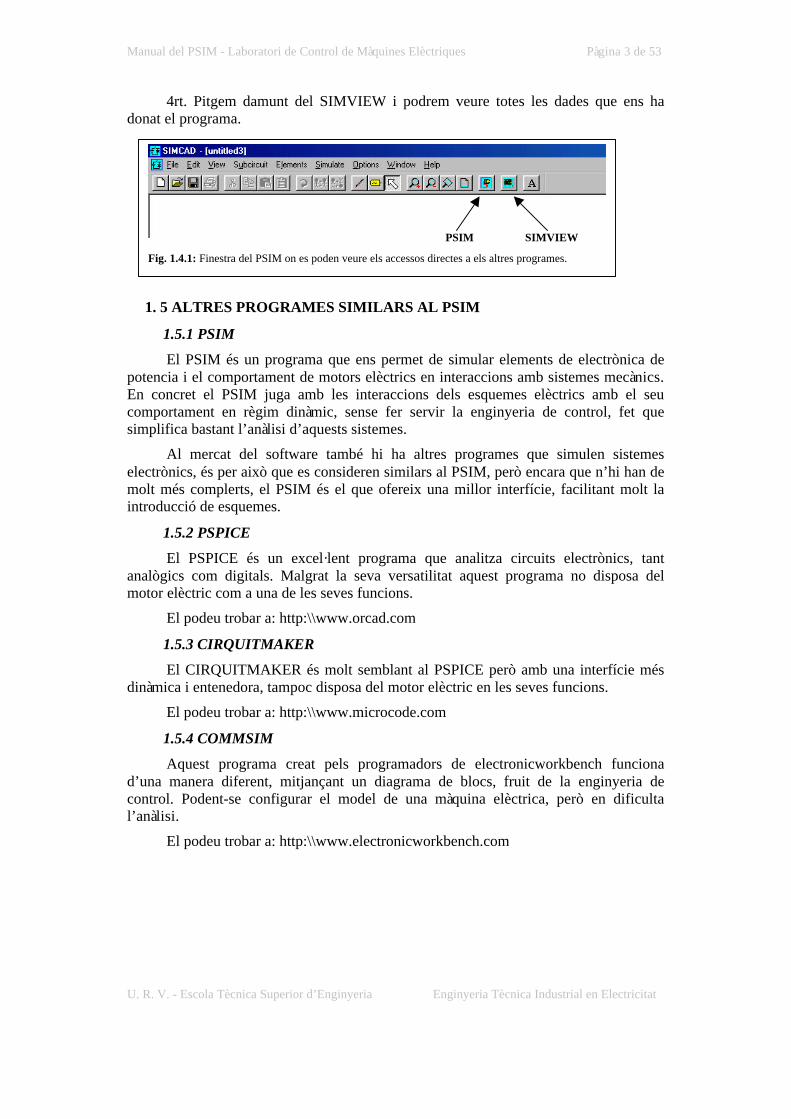
4rt. Pitgem damunt del SIMVIEW i podrem veure totes les dades que ens hadonat el programa.
1. 5 ALTRES PROGRAMES SIMILARS AL PSIM
1.5.1 PSIM
El PSIM és un programa que ens permet de simular elements de electrònica depotencia i el comportament de motors elèctrics en interaccions amb sistemes mecànics.En concret el PSIM juga amb les interaccions dels esquemes elèctrics amb el seucomportament en règim dinàmic, sense fer servir la enginyeria de control, fet quesimplifica bastant l’anàlisi d’aquests sistemes.
Al mercat del software també hi ha altres programes que simulen sistemeselectrònics, és per això que es consideren similars al PSIM, però encara que n’hi han demolt més complerts, el PSIM és el que ofereix una millor interfície, facilitant molt laintroducció de esquemes.
1.5.2 PSPICE
El PSPICE és un excel·lent programa que analitza circuits electrònics, tantanalògics com digitals. Malgrat la seva versatilitat aquest programa no disposa delmotor elèctric com a una de les seves funcions.
El podeu trobar a: http:\\www.orcad.com
1.5.3 CIRQUITMAKER
El CIRQUITMAKER és molt semblant al PSPICE però amb una interfície mésdinàmica i entenedora, tampoc disposa del motor elèctric en les seves funcions.
El podeu trobar a: http:\\www.microcode.com
1.5.4 COMMSIM
Aquest programa creat pels programadors de electronicworkbench funcionad’una manera diferent, mitjançant un diagrama de blocs, fruit de la enginyeria decontrol. Podent-se configurar el model de una màquina elèctrica, però en dificultal’anàlisi.
El podeu trobar a: http:\\www.electronicworkbench.com
Fig. 1.4.1: Finestra del PSIM on es poden veure els accessos directes a els altres programes.
PSIM SIMVIEW

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 4 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
1.5.5 CIRQUIT SHOP
És un programa molt similar al electronicworkbench molt òptim per analitzarsistemes electrònics però no inclou el tema les màquines elèctriques.
El podeu trobar a:
http://ourworld.compuserve.com/homepages/Cherrywood/cshop1.htm
1.5.6 MICRO-CAP
El MICRO-CAP és molt similar al PSPICE, tampoc disposa del motor elèctric enles seves funcions.
El podeu trobar a: http://spectrum-soft.com
1.5.7 TARGET
Aquest programa és capaç de dissenyar plaques electròniques, a banda de simularel comportament dels diferents elements electrònics. Però com en els casos anteriors noes poden inclouré màquines elèctriques motrius.
El podeu trobar a: http://ibfriendrich.com
1.5.8 ICAP
El ICAP és un altre simulador de electrònica digital i analògica, amb un entornmolt explícit i a més a més és pot adaptar amb sistemes de SCADA; òptim, però nocontempla el motor elèctric.
El podeu trobar a: http://www.intusoft.com
1.5.9 SPACE-IT
El SPACE-IT és molt similar al PSPICE i tampoc disposa del motor elèctric enles seves funcions.
El podeu trobar a: http://www.cadmigos.com
1.5.10 SPACE AGE
Com els altres casos però no te una interfície gràfica, el qual complica molt laseva utilització, a part de no tenir la màquina elèctrica com a funció.
El podeu trobar a: http://www.looking.co.uk/spice
1.5.11 SIMETRIX
Programa òptim per a la seva utilització, capaç de simular els circuits; no obstant,tampoc disposa de la màquina elèctrica en cap de les seves funcions. Un apartat molt bodel programa són els seus tutorials.
El podeu trobar a: http://www.newburytech.co.uk/
1.5.12 TOPSPICE
El TOPSPICE és molt semblant al PSPICE, tampoc disposa del motor elèctric enles seves funcions, encara que te una millor interfície.
El podeu trobar a: http://www.penzar.com/topspice.htm

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 5 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
1.5.13 TINA
Un molt bo programa per a simular circuits; tot i això, no és millor que el pspice.
El podeu trobar a: http://www.designsoftware.com/
1.5.14 VISUALSPICE
El VISUALSPACE és un altre programa similar al PSPICE.
El podeu trobar a: http://www.islandlogix.com/
2 LLISTAT DELS MENÚS PER A ELÈCTRICS
2.1 LLISTAT DELS MENÚS DEL SIMCAD
2.1.1 FILE
El menú File disposa de les següents comandes:
New (ctrl+N) crea un circuit nou
Open ( ctrl+O) obre un circuit que ja ha estat creat.
Close tanca la finestra que tenim activa
Close All tanca totes les finestres que tinguem obertes
Save (ctrl+S) guarda el circuit de la finestra que tenim activa
Save As grava el circuit de la finestra que tenim activa en undirectori que escollim nosaltres
Save All grava tots els circuits
Save with Password grava el circuit amb opció de incloure-hi un codi de
entrada
Print (ctrl+P) imprimeix el circuit.
Print Preview vista prèvia de la impressió
Print Selected imprimeix solament les parts seleccionades del circuit
Print Selected Preview vista prèvia de la impressió tan sols amb aquelles parts
seleccionades
Print Page Setup configura la llegenda de la pàgina
Printer Setup obre el menú de les propietats de la impressora
Exit surt del SIMCAD

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 6 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
2.1.2 EDIT
El menú Edit disposa de les següents comandes:
Undo Delete (ctrl+Z) recupera l’últim element que hem esborrat
Cut (Ctrl+X) esborra els elements seleccionats i els copia alportapapers
Copy (ctrl+C) copia els elements seleccionats al portapapers
Paste ( ctrl+V) enganxa els elements seleccionats del portapapers a lafinestra activa
Select All selecciona tots els elements que tenim a la finestraactiva
Copy to Clipboard - Color: copia com a imatge tot els elementsseleccionats del circuit al portapapers, amb color.
- Black & White: (ctrl+B) copia com a imatge tot elselements seleccionats del circuit al portapapers, ambblanc i negre.
Text (F9) per a insertar un text a la finestra activa, molt útil per aincloure aclariments o comentaris sobre el circuit.
Wire dibuixa una unió entre dos punts diferents.
Label (F2) posa una etiqueta a un element, molt útil per a
esquemes complicats, ja que ens permet de tallar
el circuit en diferents parts
Attributes (F4) edita els atributs dels elements (també es fa amb undoble click del ratolí)
Rotate gira els elements seleccionats
Flip L/R fa una simetria respecte el eix vertical dels elements
Flip T/B fa una simetria respecte el eix horitzontal dels elements
Find busca un element ficant el nom que te
Find Next busca el següent element que te el mateix nom que elbuscat anteriorment
Edit Library edita la llibreria dels elements (no es pot fer amb laversió demo)
Escape surt de tots els editors de llibreries oberts

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 7 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
2.1.3 VIEW
Status Bar activa o desactiva la barra de estat (indica quina es lafunció que es realitza en tot moment)
Toolbar activa o desactiva la barra de funcions del SIMCAD
Element Toolbar activa o desactiva la barra de els elements més comunsdel SIMCAD
Zoom In (+) zoom per a apropar
Zoom Out (-) zoom per a allunyar
Fit to Page enquadra tots els elements a la mida de la finestra activa
Zoom in Selected zoom de la secció seleccionada
List Element ensenya la llista dels elements seleccionats
2.1.4 ELEMENTS
En aquesta part del menú tenim moltes opcions que per als elèctrics gairebé nos’utilitzen; tan és així, que s’ha decidit d’agrupar-les d’una manera diferent a com lespodem trobar als menús del PSIM.
2.1.4.1Conceptes generals
En el menú de elements hi trobem diferents apartats, aquests són:
Power: en aquest apartat tenim tots els elements de potencia; com ara són, elselements passius passant per interruptors, transformadors i motors elèctrics.
Control: aquí podem trobar tots els elements que s’engloben dintre de laenginyeria de control, com per exemple portes lògiques funcions i altres elements queno són necessaris per al estudi de les màquines elèctriques.
Other: en el capítol d’altres elements trobem, sensors, la connexió a terra i altreselements com ara els activadors dels interruptors que s’han comentat avanç en el punt a.
Sources: com el seu nom indica aquí trobem tot tipus de fonts, ja sigui de correntcontinua com de corrent alterna.
Simbols: conte símbols, concretament la fletxa(arrow).
User Defined: si el usuari ho desitja pot crear elements diferents als que te elmenú del PSIM.

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 8 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.2.1: figura representativa de la resistència tal icom la representa el PSIMElements->Power->RLC Branches->R
Fig. 2.1.4.2.2: figura representativa de la bobina tal i com larepresenta el PSIMElements->Power->RLC Branches->L
Quan trèiem qualsevol element el podem configurar fent un doble click sobre ellmateix i s’obrirà un menú, en aquest menú hi tenim dos apartats més petits, com són:
Parameters: opcions que es poden configurar del menú que ens han de permetrede configurar els elements al nostre criteri.
Display: En la finestra de paràmetres podem activar aquesta finestreta, si la tenimactivada podrem veure el valor o el nom que fiquem al element corresponent perpantalla sense que haguem de obrir el menú.
Other info: informació addicional que no influeix en el funcionament delelement.
2.1.4.2 Elements passius
Els elements passius, com les resistències, bobines i condensadors es troben a lapart del menú Elements->Power->RLC Branches.
Resistència
Name: es fica el nom de la resistència (R1)
Resistance: es fica el valor de la resistència (Ω)
Current Flag: 0 si no volem saber quina és la intensitat que passa per laresistència i 1 si la volem saber.
Bobina
Name: es posa el nom de la bobina (L1)
Inductance: es posa el valor de la inductància (H)
Initial Current: intensitat que passa per la bobina quan T=0 (A)
Current Flag: 0 si no volem saber quina és la intensitat que passa per la bobina i1 si la volem saber.

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 9 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.2.3: figura representativa del condensador tal icom el representa el PSIMElements->Power->RLC Branches->C
Fig. 2.1.4.2.4: figura representativa del conjunt resistència -bobina tal i com el representa el PSIMElements->Power->RLC Branches->RL
Fig. 2.1.4.2.5: figura representativa del conjunt resistència -condensador tal i com el representa el PSIMElements->Power->RLC Branches->RC
Condensador
Name: es fica el nom al condensador (C1)
Capacitance: es fica el valor de la capacitància (F)
Init. Cap. voltage: tensió que te el condensador quan T=0 (V)
Current Flag: 0 si no volem saber quina es la intensitat que passa pelcondensador i 1 si la volem saber.
Conjunt resistència - bobina
Name: es fica el nom al condensador (RL1)
Resistance: es fica el valor de la resistència (Ω)
Inductance: es fica el valor de la inductància (H)
Initial Current: intensitat que passa pel conjunt resistència - bobina quan T=0 (A)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Conjunt resistència - condensador
Name: es posa el nom al Conjunt resistència - condensador (RC1)
Resistance: es posa el valor de la resistència (Ω)
Capacitance: es posa el valor de la capacitància (F)
Init. Cap. voltage: tensió que te el condensador quan T=0 (V)
Current Flag: 0 si no volem saber quina es la intensitat
que passa pel element i 1 si la volem saber.
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 10 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
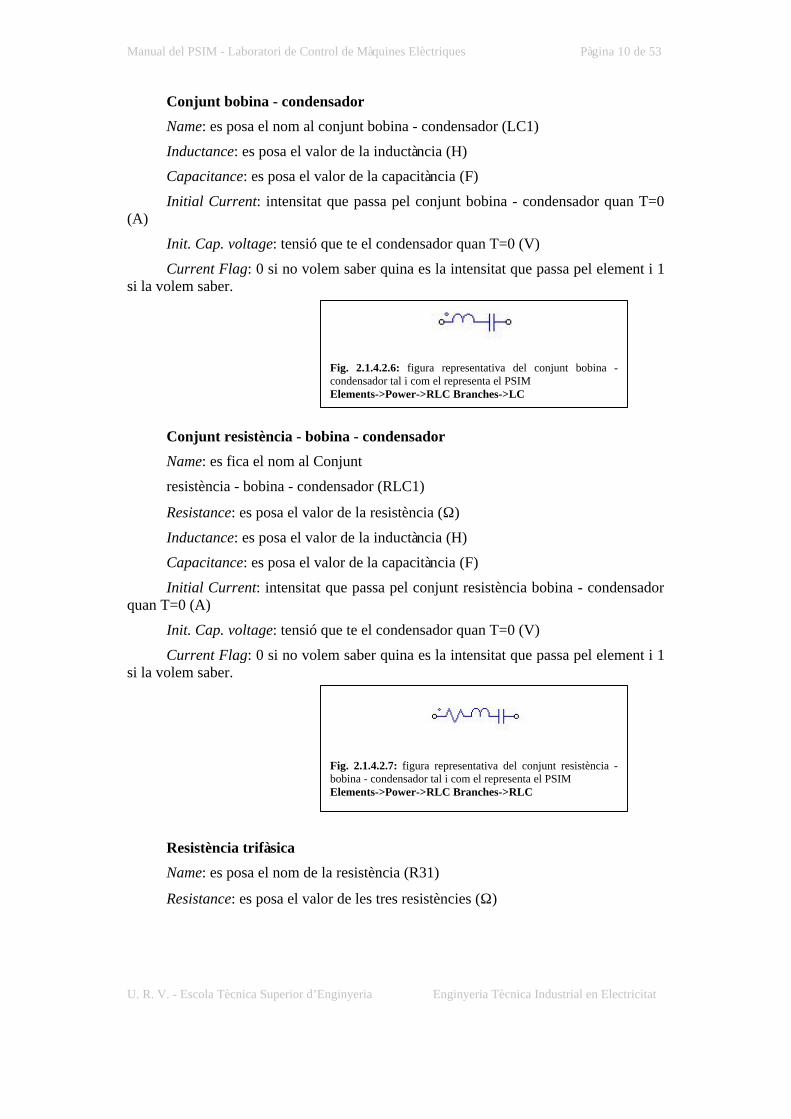
Fig. 2.1.4.2.6: figura representativa del conjunt bobina -condensador tal i com el representa el PSIMElements->Power->RLC Branches->LC
Fig. 2.1.4.2.7: figura representativa del conjunt resistència -bobina - condensador tal i com el representa el PSIMElements->Power->RLC Branches->RLC
Conjunt bobina - condensador
Name: es posa el nom al conjunt bobina - condensador (LC1)
Inductance: es posa el valor de la inductància (H)
Capacitance: es posa el valor de la capacitància (F)
Initial Current: intensitat que passa pel conjunt bobina - condensador quan T=0(A)
Init. Cap. voltage: tensió que te el condensador quan T=0 (V)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Conjunt resistència - bobina - condensador
Name: es fica el nom al Conjunt
resistència - bobina - condensador (RLC1)
Resistance: es posa el valor de la resistència (Ω)
Inductance: es posa el valor de la inductància (H)
Capacitance: es posa el valor de la capacitància (F)
Initial Current: intensitat que passa pel conjunt resistència bobina - condensadorquan T=0 (A)
Init. Cap. voltage: tensió que te el condensador quan T=0 (V)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Resistència trifàsica
Name: es posa el nom de la resistència (R31)
Resistance: es posa el valor de les tres resistències (Ω)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 11 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.2.8: figura representativa de la resistènciatrifàsica tal i com la representa el PSIMElements->Power->RLC Branches->R3
Fig. 2.1.4.2.9: figura representativa del conjunt resistència –bobina trifàsic tal i com la representa el PSIMElements->Power->RLC Branches->RL3
Current Flag_A: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber. per a la fase A, que esta al costat del punt.
Current Flag_B: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase , la que esta al mig.
Current Flag_C: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase C que esta al extrem i no te punt.
Conjunt resistència - bobina trifàsica
Name: es posa el nom del conjunt (RL31)
Resistance: es posa el valor de les tres resistències (Ω)
Inductance: es posa el valor de les tres inductàncies (H)
Current Flag_A: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase A, que esta al costat del punt.
Current Flag_B: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase , la que esta al mig.
Current Flag_C: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase C que esta al extrem i no te punt..
Conjunt resistència - condensador trifàsic
Name: es posa el nom del conjunt (RC31)
Resistance: es posa el valor de les tres resistències (Ω)
Capacitance: el valor de les tres capacitàncies (F)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 12 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.2.10: figura representativa del conjunt resistència–condensador trifàsic tal i com la representa el PSIMElements->Power->RLC Branches->RC3
Fig. 2.1.4.2.11: figura representativa del conjunt resistència– bobina - condensador trifàsic tal i com la representa elPSIMElements->Power->RLC Branches->RC3
Current Flag_A: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase A, que esta al costat del punt.
Current Flag_B: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase, la que esta al mig.
Current Flag_C: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase C que esta al extrem i no te punt..
Conjunt resistència – bobina - condensador trifàsic
Name: es posa el nom del conjunt (RLC31)
Resistance: es posa el valor de les tres resistències (Ω)
Inductance: es posa el valor de les tres inductàncies (H)
Capacitance: el valor de les tres capacitàncies (F)
Current Flag_A: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase A, que esta al costat del punt.
Current Flag_B: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase B, la que esta al mig.
Current Flag_C: 0 si no volem saber quina es la intensitat que passa per laresistència i 1 si la volem saber, per a la fase C que esta al extrem i no te punt..

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 13 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.2.12: figura representativa de dues bobinesacoblades tal i com la representa el PSIMElements->Power->RLC Branches->MUT2
Dues bobines acoblades
Name: es posa el nom del element (M1)
L11 (self):inductància de la primera bobina (H)
L12 (mutual):inductància mútua de les dos bobines (H)
L22 (self):inductància de la segona bobina (H)
i1_initial: intensitat que passa per la primera bobina quan T=0 (A)
I2_initial: intensitat que passa per la segona bobina quan T=0 (A)
Iflag_1: 0 si no volem saber quina es la intensitat que passa per la primera brancai 1 si la volem saber.
Iflag_2: 0 si no volem saber quina es la intensitat que passa per la segona branca i1 si la volem saber.
Tres bobines acoblades
Name: es posa el nom del element (MUT1)
L11 (self): inductància de la primera bobina (H)
L12 (mutual):inductància mútua de les dues primeres bobines (H)
L22 (self):inductància de la segona bobina (H)
L13 (mutual):inductància mútua de la primera a la tercera bobina (H)
L23 (mutual):inductància mútua de la segona a la tercera bobina (H)
L33 (self): inductància de la tercera bobina (H)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 14 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.2.13: figura representativa de tres bobinesacoblades tal i com la representa el PSIMElements->Power->RLC Branches->MUT3
Fig. 2.1.4.3.1: figura representativa del transformador ideal tali com el representa el PSIMElements->Power->Transformers->TF_IDEAL
i1_initial: intensitat que passa per la primera bobina quan T=0 (A)
I2_initial: intensitat que passa per la segona bobina quan T=0 (A)
I3_initial: intensitat que passa per la tercera bobina quan T=0 (A)
Iflag_1: 0 si no volem saber quina es la intensitat que passa per la primera bobinai 1 si la volem saber.
Iflag_2: 0 si no volem saber quina es la intensitat que passa per la segona bobina i1 si la volem saber.
Iflag_3: 0 si no volem saber quina es la intensitat que passa per la tercera bobina i1 si la volem saber.
2.1.4.3 Transformadors
Els elements anomenats transformadors són màquines elèctriques capaces decanviar el valor de la tensió e intensitat segons les necessitats, es poden trobar a la partdel menú Elements->Power->Transformers.
Transformador ideal monofàsic
Name: es posa el nom del transformador (TI1)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 15 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
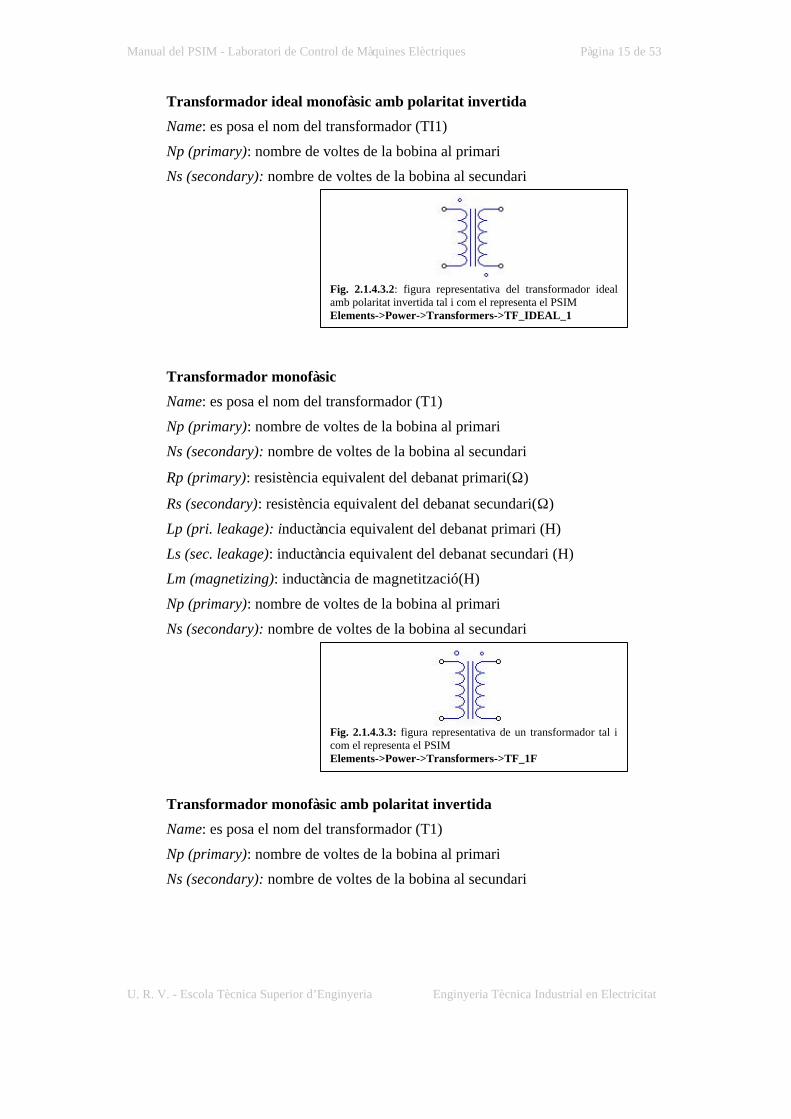
Fig. 2.1.4.3.2: figura representativa del transformador idealamb polaritat invertida tal i com el representa el PSIMElements->Power->Transformers->TF_IDEAL_1
Fig. 2.1.4.3.3: figura representativa de un transformador tal icom el representa el PSIMElements->Power->Transformers->TF_1F
Transformador ideal monofàsic amb polaritat invertida
Name: es posa el nom del transformador (TI1)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Transformador monofàsic
Name: es posa el nom del transformador (T1)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Rp (primary): resistència equivalent del debanat primari(Ω)
Rs (secondary): resistència equivalent del debanat secundari(Ω)
Lp (pri. leakage): inductància equivalent del debanat primari (H)
Ls (sec. leakage): inductància equivalent del debanat secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Transformador monofàsic amb polaritat invertida
Name: es posa el nom del transformador (T1)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 16 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
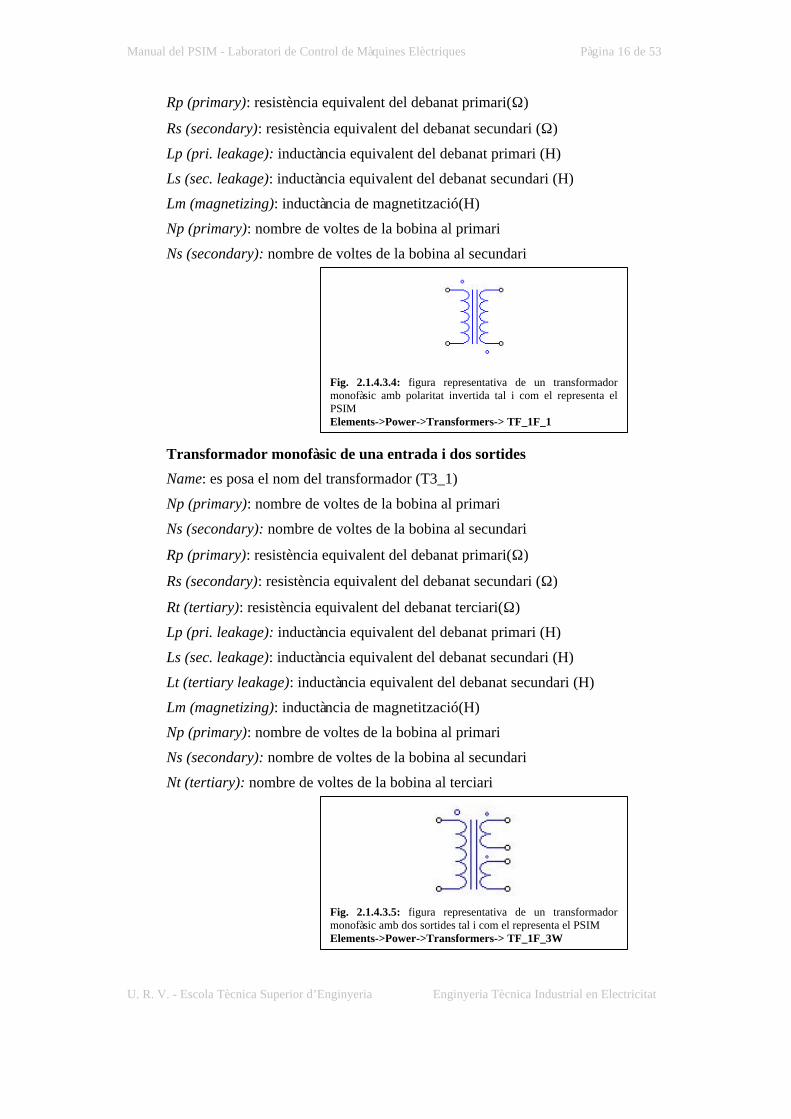
Fig. 2.1.4.3.4: figura representativa de un transformadormonofàsic amb polaritat invertida tal i com el representa elPSIMElements->Power->Transformers-> TF_1F_1
Fig. 2.1.4.3.5: figura representativa de un transformadormonofàsic amb dos sortides tal i com el representa el PSIMElements->Power->Transformers-> TF_1F_3W
Rp (primary): resistència equivalent del debanat primari(Ω)
Rs (secondary): resistència equivalent del debanat secundari (Ω)
Lp (pri. leakage): inductància equivalent del debanat primari (H)
Ls (sec. leakage): inductància equivalent del debanat secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Transformador monofàsic de una entrada i dos sortides
Name: es posa el nom del transformador (T3_1)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Rp (primary): resistència equivalent del debanat primari(Ω)
Rs (secondary): resistència equivalent del debanat secundari (Ω)
Rt (tertiary): resistència equivalent del debanat terciari(Ω)
Lp (pri. leakage): inductància equivalent del debanat primari (H)
Ls (sec. leakage): inductància equivalent del debanat secundari (H)
Lt (tertiary leakage): inductància equivalent del debanat secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de la bobina al primari
Ns (secondary): nombre de voltes de la bobina al secundari
Nt (tertiary): nombre de voltes de la bobina al terciari
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 17 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
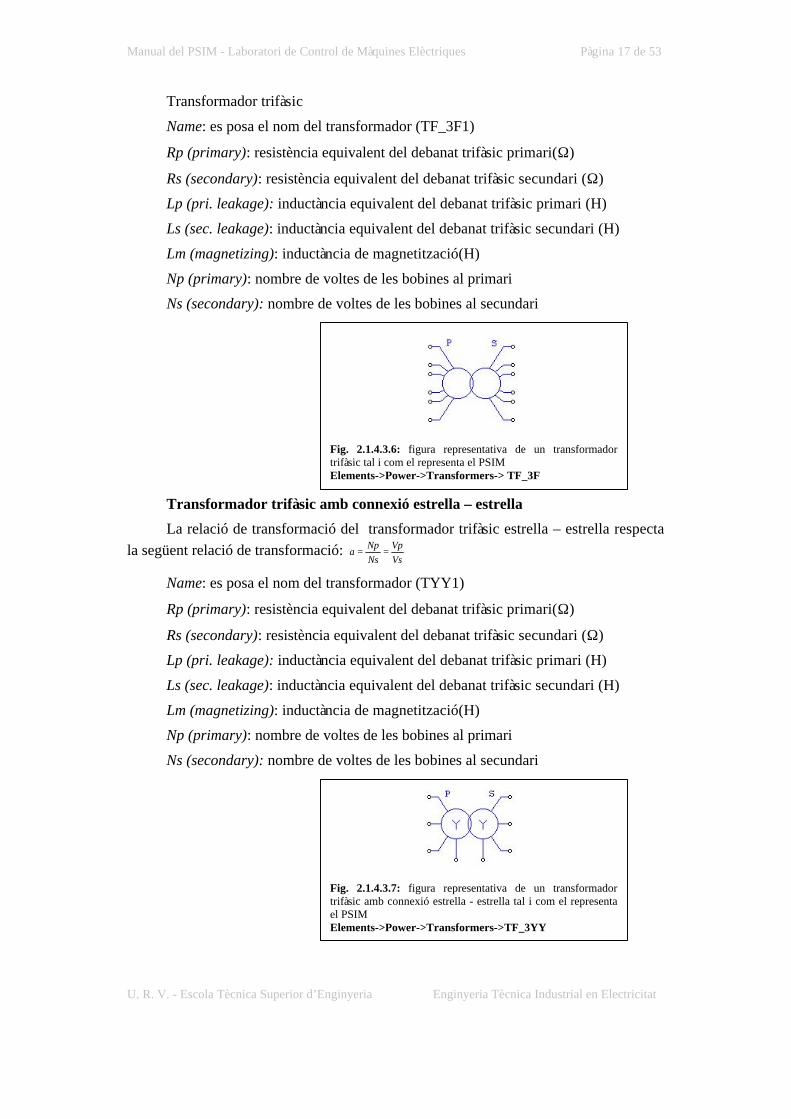
Fig. 2.1.4.3.6: figura representativa de un transformadortrifàsic tal i com el representa el PSIMElements->Power->Transformers-> TF_3F
Fig. 2.1.4.3.7: figura representativa de un transformadortrifàsic amb connexió estrella - estrella tal i com el representael PSIMElements->Power->Transformers->TF_3YY
Transformador trifàsic
Name: es posa el nom del transformador (TF_3F1)
Rp (primary): resistència equivalent del debanat trifàsic primari(Ω)
Rs (secondary): resistència equivalent del debanat trifàsic secundari (Ω)
Lp (pri. leakage): inductància equivalent del debanat trifàsic primari (H)
Ls (sec. leakage): inductància equivalent del debanat trifàsic secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de les bobines al primari
Ns (secondary): nombre de voltes de les bobines al secundari
Transformador trifàsic amb connexió estrella – estrella
La relació de transformació del transformador trifàsic estrella – estrella respectala següent relació de transformació:
Vs
Vp
Ns
Npa ==
Name: es posa el nom del transformador (TYY1)
Rp (primary): resistència equivalent del debanat trifàsic primari(Ω)
Rs (secondary): resistència equivalent del debanat trifàsic secundari (Ω)
Lp (pri. leakage): inductància equivalent del debanat trifàsic primari (H)
Ls (sec. leakage): inductància equivalent del debanat trifàsic secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de les bobines al primari
Ns (secondary): nombre de voltes de les bobines al secundari

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 18 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.3.8: figura representativa de un transformadortrifàsic amb connexió estrella - triangle tal i com el representael PSIMElements->Power->Transformers-> TF_3YD
Transformador trifàsic amb connexió estrella – triangle
La relació de transformació del transformador amb connexió trifàsic estrella –triangle respecta la següent relació de transformació:
Vs
Vp
Ns
Npa ==
·3
Name: es posa el nom del transformador (TF_3YD1)
Rp (primary): resistència equivalent del debanat trifàsic primari(Ω)
Rs (secondary): resistència equivalent del debanat trifàsic secundari (Ω)
Lp (pri. leakage): inductància equivalent del debanat trifàsic primari (H)
Ls (sec. leakage): inductància equivalent del debanat trifàsic secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de les bobines al primari
Ns (secondary): nombre de voltes de les bobines al secundari
Transformador trifàsic amb connexió triangle – estrella
La relació de transformació del transformador amb connexió trifàsic triangle –
estrella respecta la següent relació de transformació: Vs
Vp
Ns
Npa ==
3
Name: es posa el nom del transformador (TF_3DY1)
Rp (primary): resistència equivalent del debanat trifàsic primari(Ω)
Rs (secondary): resistència equivalent del debanat trifàsic secundari (Ω)
Lp (pri. leakage): inductància equivalent del debanat trifàsic primari (H)
Ls (sec. leakage): inductància equivalent del debanat trifàsic secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 19 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
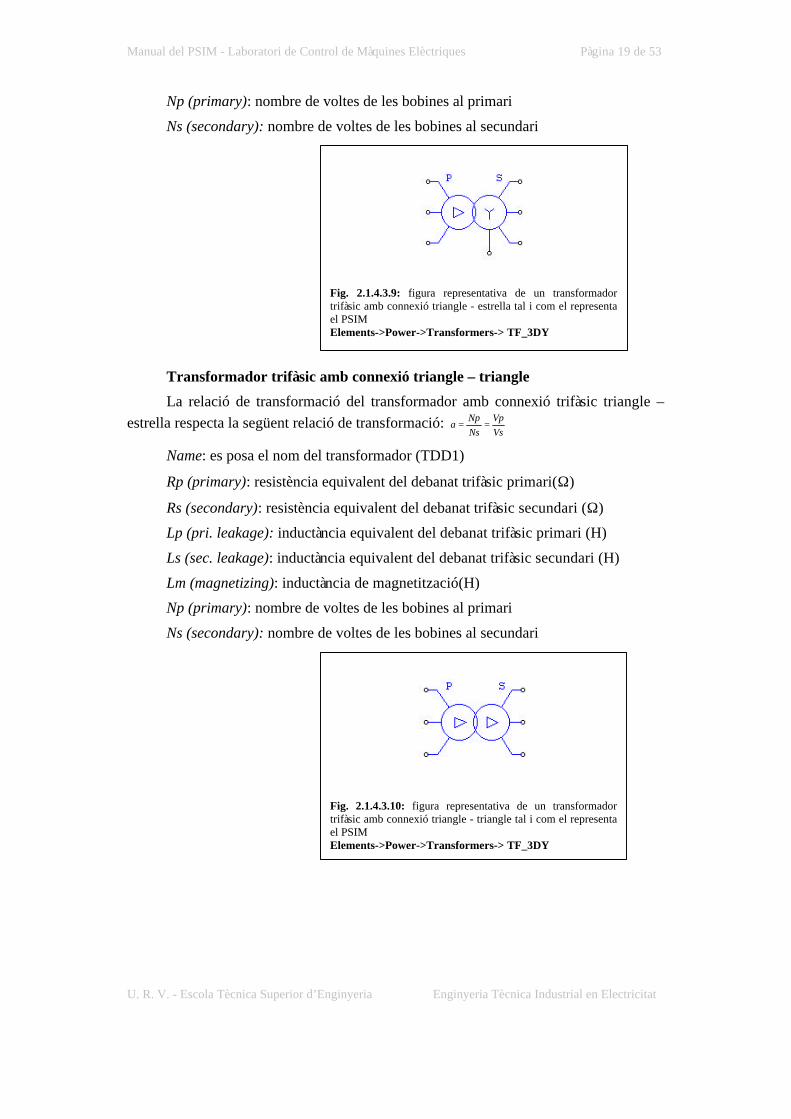
Fig. 2.1.4.3.9: figura representativa de un transformadortrifàsic amb connexió triangle - estrella tal i com el representael PSIMElements->Power->Transformers-> TF_3DY
Fig. 2.1.4.3.10: figura representativa de un transformadortrifàsic amb connexió triangle - triangle tal i com el representael PSIMElements->Power->Transformers-> TF_3DY
Np (primary): nombre de voltes de les bobines al primari
Ns (secondary): nombre de voltes de les bobines al secundari
Transformador trifàsic amb connexió triangle – triangle
La relació de transformació del transformador amb connexió trifàsic triangle –estrella respecta la següent relació de transformació:
Vs
Vp
Ns
Npa ==
Name: es posa el nom del transformador (TDD1)
Rp (primary): resistència equivalent del debanat trifàsic primari(Ω)
Rs (secondary): resistència equivalent del debanat trifàsic secundari (Ω)
Lp (pri. leakage): inductància equivalent del debanat trifàsic primari (H)
Ls (sec. leakage): inductància equivalent del debanat trifàsic secundari (H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de les bobines al primari
Ns (secondary): nombre de voltes de les bobines al secundari

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 20 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.3.11: figura representativa de un transformadortrifàsic amb connexió estrella - triangle - triangle tal i com elrepresenta el PSIMElements->Power->Transformers->TF_3YDD
Transformador trifàsic amb connexió estrella – triangle - triangle
Les relacions de transformació del transformador amb connexió trifàsica triangle– estrella – estrella respecta les següents relacions de transformació:
Vs
Vp
Ns
Npaps ==
3
Vs
Vp
Ns
Npapt ==
·3
Vs
Vp
Ns
Npast ==
Name: es posa el nom del transformador (TYDD1)
Rp (primary): resistència equivalent del debanat trifàsic primari(Ω)
Rs (secondary): resistència equivalent del debanat trifàsic secundari (Ω)
Rt (tertiary): resistència equivalent del debanat trifàsic terciari(Ω)
Lp (pri. leakage): inductància equivalent del debanat trifàsic primari (H)
Ls (sec. leakage): inductància equivalent del debanat trifàsic secundari (H)
Lt (tertiary leakage): inductància equivalent del debanat trifàsic terciari(H)
Lm (magnetizing): inductància de magnetització
Np (primary): nombre de voltes de les bobines al primari
Ns (secondary): nombre de voltes de les bobines al secundari
Nt (tertiary): nombre de voltes de les bobines al terciari
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 21 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
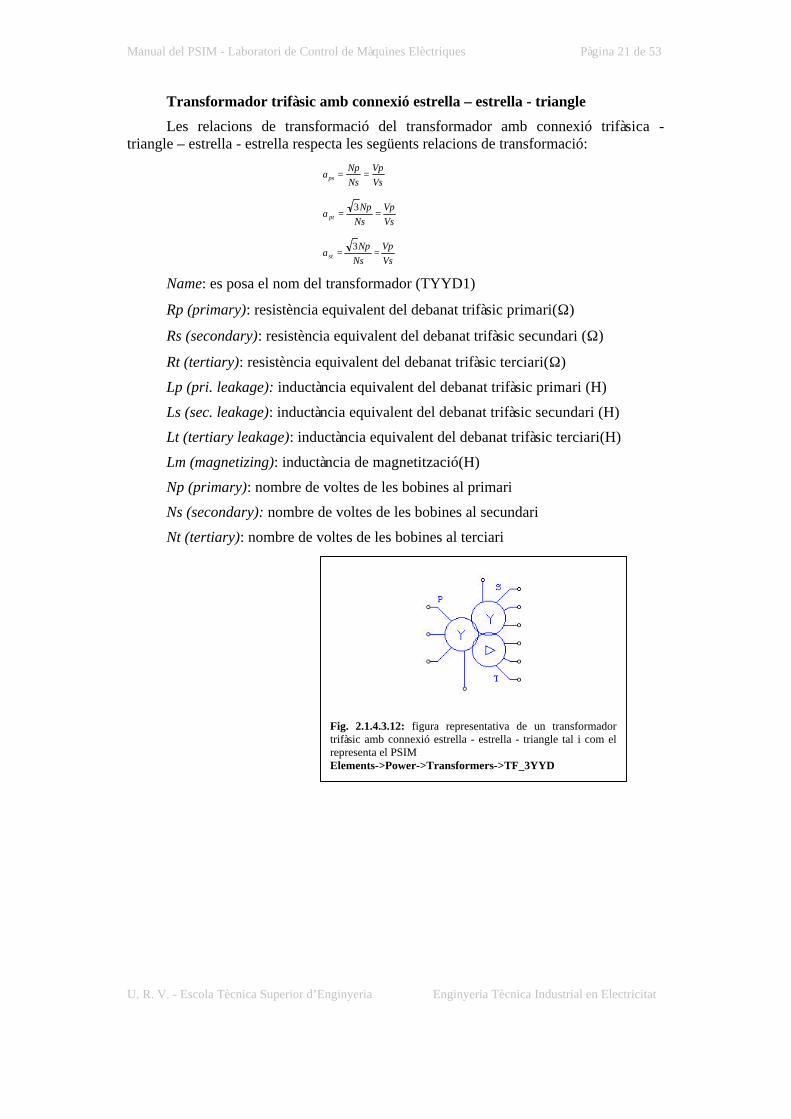
Fig. 2.1.4.3.12: figura representativa de un transformadortrifàsic amb connexió estrella - estrella - triangle tal i com elrepresenta el PSIMElements->Power->Transformers->TF_3YYD
Transformador trifàsic amb connexió estrella – estrella - triangle
Les relacions de transformació del transformador amb connexió trifàsica -triangle – estrella - estrella respecta les següents relacions de transformació:
Vs
Vp
Ns
Npaps ==
Vs
Vp
Ns
Npa pt ==
3
Vs
Vp
Ns
Npast ==
3
Name: es posa el nom del transformador (TYYD1)
Rp (primary): resistència equivalent del debanat trifàsic primari(Ω)
Rs (secondary): resistència equivalent del debanat trifàsic secundari (Ω)
Rt (tertiary): resistència equivalent del debanat trifàsic terciari(Ω)
Lp (pri. leakage): inductància equivalent del debanat trifàsic primari (H)
Ls (sec. leakage): inductància equivalent del debanat trifàsic secundari (H)
Lt (tertiary leakage): inductància equivalent del debanat trifàsic terciari(H)
Lm (magnetizing): inductància de magnetització(H)
Np (primary): nombre de voltes de les bobines al primari
Ns (secondary): nombre de voltes de les bobines al secundari
Nt (tertiary): nombre de voltes de les bobines al terciari
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 22 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
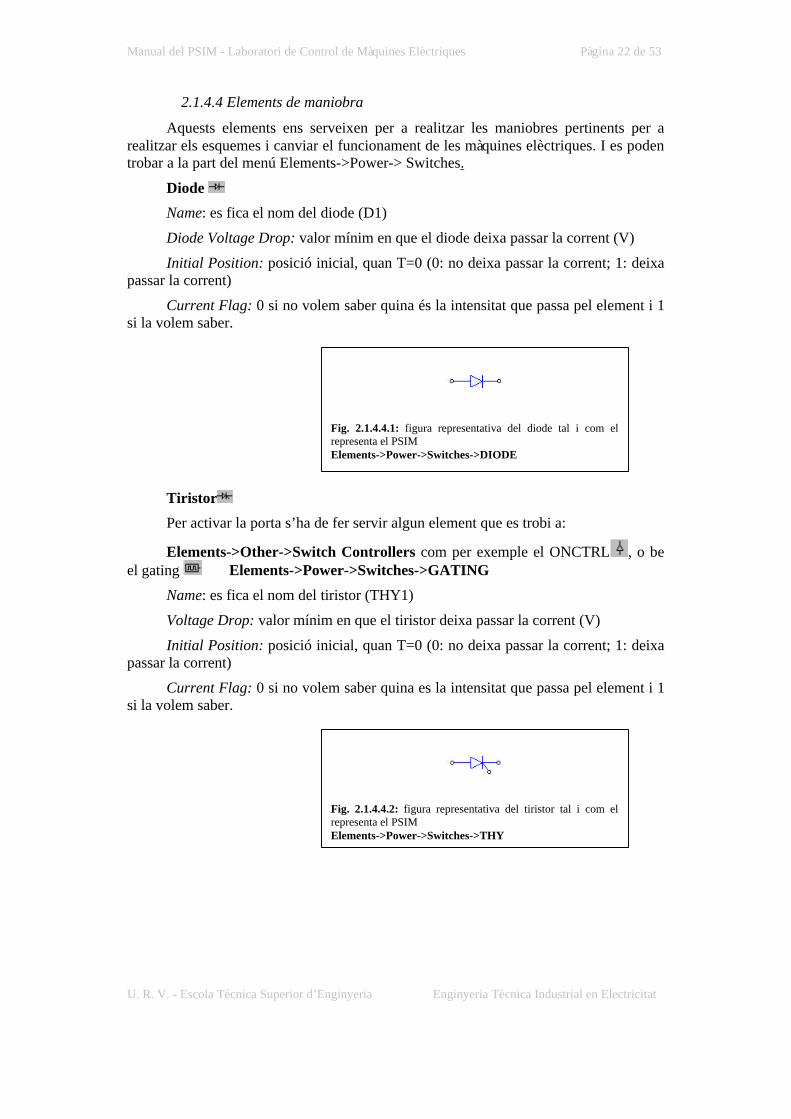
Fig. 2.1.4.4.1: figura representativa del diode tal i com elrepresenta el PSIMElements->Power->Switches->DIODE
Fig. 2.1.4.4.2: figura representativa del tiristor tal i com elrepresenta el PSIMElements->Power->Switches->THY
2.1.4.4 Elements de maniobra
Aquests elements ens serveixen per a realitzar les maniobres pertinents per arealitzar els esquemes i canviar el funcionament de les màquines elèctriques. I es podentrobar a la part del menú Elements->Power-> Switches.
Diode
Name: es fica el nom del diode (D1)
Diode Voltage Drop: valor mínim en que el diode deixa passar la corrent (V)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina és la intensitat que passa pel element i 1si la volem saber.
Tiristor
Per activar la porta s’ha de fer servir algun element que es trobi a:
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Name: es fica el nom del tiristor (THY1)
Voltage Drop: valor mínim en que el tiristor deixa passar la corrent (V)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 23 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.4.3: figura representativa del transistor NPN(funcionant com a interruptor) tal i com el representa el PSIMElements->Power->Switches->NPN
Fig. 2.1.4.4.4: figura representativa del transistor PNP(funcionant com a interruptor) tal i com el representa el PSIMElements->Power->Switches->PNP
Transistor NPN(funcionant com a interruptor)
Per activar el transistor s’ha de connectar algun element a la base que es trobi a
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Name: es fica el nom del transistor (NPN1)
Saturation Voltage: valor mínim en que el transistor deixa passar la corrent (V)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Transistor PNP (funcionant com a interruptor)
Per activar el transistor s’ha de connectar algun element a la base que es trobi a
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Name: es fica el nom del transistor (PNP1)
Saturation Voltage: valor mínim en que el transistor deixa passar la corrent (V)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 24 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.4.5: figura representativa del transistor MOSFET(funcionant com a interruptor) tal i com el representa el PSIMElements->Power->Switches-> MOSFET
Transistor MOSFET(funcionant com a interruptor, bidireccional)
Per activar el transistor s’ha de connectar algun element a la base que es trobi a
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Name: es fica el nom del transistor (MOS1)
On Resistance: resistència que ofereix el mosfet al pas de corrent (Ω)
Diode Voltage Drop: valor mínim en que el diode en antiparal·lel deixa passar lacorrent (V)
Saturation Voltage: valor mínim en que el transistor deixa passar la corrent (V)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Transistor MOSFET_P (funcionant com a interruptor, bidireccional)
Per activar el transistor s’ha de connectar algun element a la base que es trobi a
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Name: es fica el nom del transistor (PMOS1)
On Resistance: resistència que ofereix el mosfet al pas de corrent (Ω)
Diode Voltage Drop: valor mínim en que el diode en antiparal·lel deixa passar lacorrent (V)
Saturation Voltage: valor mínim en que el transistor deixa passar la corrent (V)
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 25 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
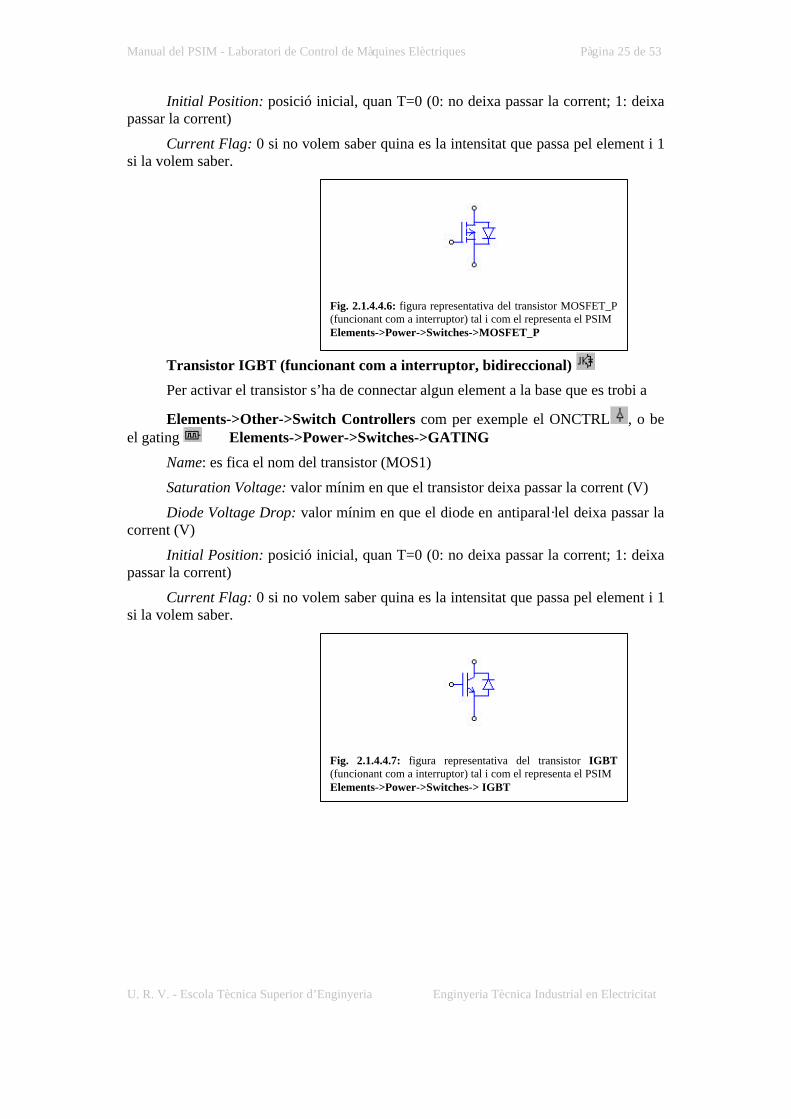
Fig. 2.1.4.4.6: figura representativa del transistor MOSFET_P(funcionant com a interruptor) tal i com el representa el PSIMElements->Power->Switches->MOSFET_P
Fig. 2.1.4.4.7: figura representativa del transistor IGBT(funcionant com a interruptor) tal i com el representa el PSIMElements->Power->Switches-> IGBT
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Transistor IGBT (funcionant com a interruptor, bidireccional)
Per activar el transistor s’ha de connectar algun element a la base que es trobi a
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Name: es fica el nom del transistor (MOS1)
Saturation Voltage: valor mínim en que el transistor deixa passar la corrent (V)
Diode Voltage Drop: valor mínim en que el diode en antiparal·lel deixa passar lacorrent (V)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 26 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
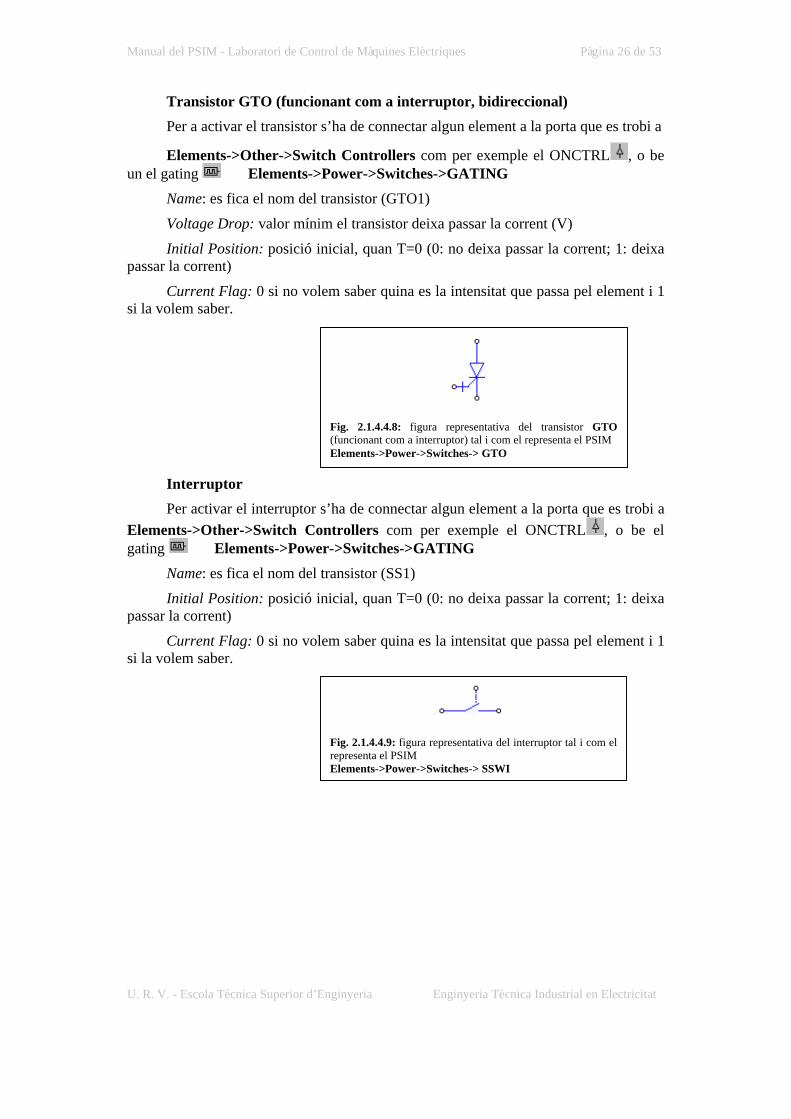
Fig. 2.1.4.4.8: figura representativa del transistor GTO(funcionant com a interruptor) tal i com el representa el PSIMElements->Power->Switches-> GTO
Fig. 2.1.4.4.9: figura representativa del interruptor tal i com elrepresenta el PSIMElements->Power->Switches-> SSWI
Transistor GTO (funcionant com a interruptor, bidireccional)
Per a activar el transistor s’ha de connectar algun element a la porta que es trobi a
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beun el gating Elements->Power->Switches->GATING
Name: es fica el nom del transistor (GTO1)
Voltage Drop: valor mínim el transistor deixa passar la corrent (V)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Interruptor
Per activar el interruptor s’ha de connectar algun element a la porta que es trobi aElements->Other->Switch Controllers com per exemple el ONCTRL , o be elgating Elements->Power->Switches->GATING
Name: es fica el nom del transistor (SS1)
Initial Position: posició inicial, quan T=0 (0: no deixa passar la corrent; 1: deixapassar la corrent)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 27 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.4.10: figura representativa del transistor NPN tal icom el representa el PSIMElements->Power->Switches->NPN_1
Fig. 2.1.4.4.11: figura representativa del transistor PNP tal icom el representa el PSIMElements->Power->Switches->PNP_1
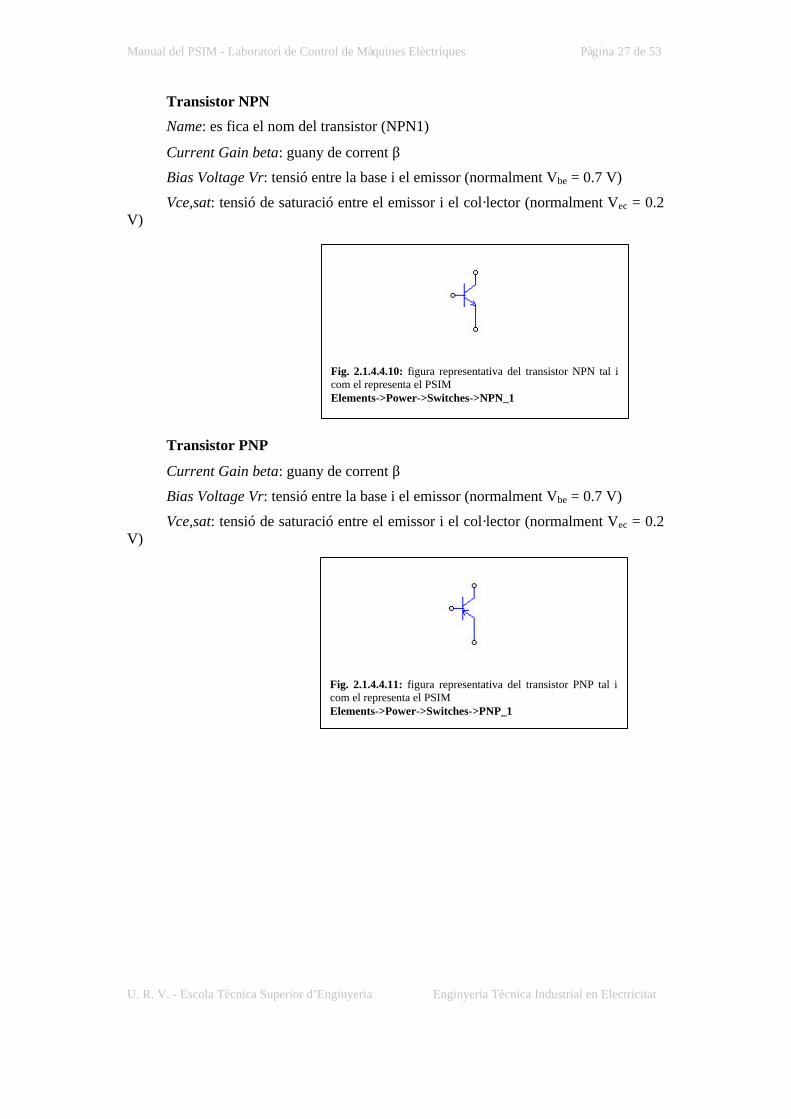
Transistor NPN
Name: es fica el nom del transistor (NPN1)
Current Gain beta: guany de corrent β
Bias Voltage Vr: tensió entre la base i el emissor (normalment Vbe = 0.7 V)
Vce,sat: tensió de saturació entre el emissor i el col·lector (normalment Vec = 0.2V)
Transistor PNP
Current Gain beta: guany de corrent β
Bias Voltage Vr: tensió entre la base i el emissor (normalment Vbe = 0.7 V)
Vce,sat: tensió de saturació entre el emissor i el col·lector (normalment Vec = 0.2V)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 28 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.4.12: figura representativa del transistor PNP tal icom el representa el PSIMElements->Power->Switches->PNP_1
Diode Zener
Name: es fica el nom del diode (Z1)
Breakdown Voltage: tensió a la que comença a conduir el zener (V)
Forward Voltage Drop: tensió de tall inversa (V)
Current Flag: 0 si no volem saber quina es la intensitat que passa pel element i 1si la volem saber.
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 29 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
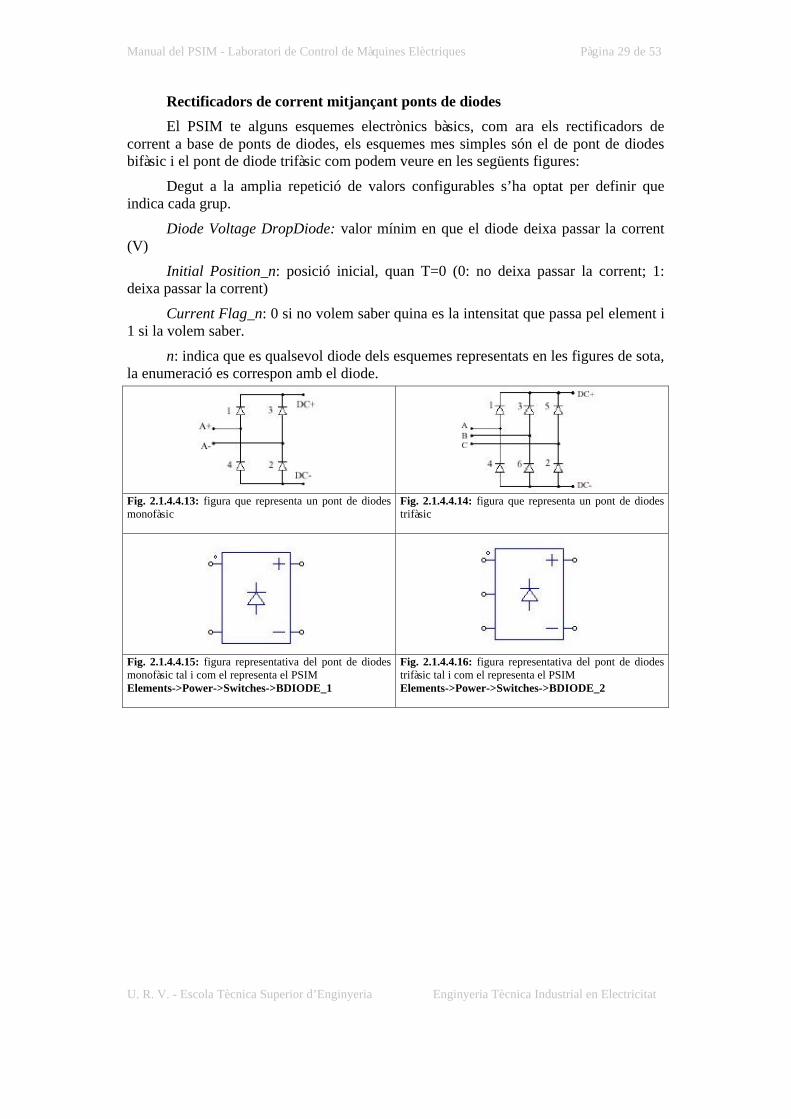
Rectificadors de corrent mitjançant ponts de diodes
El PSIM te alguns esquemes electrònics bàsics, com ara els rectificadors decorrent a base de ponts de diodes, els esquemes mes simples són el de pont de diodesbifàsic i el pont de diode trifàsic com podem veure en les següents figures:
Degut a la amplia repetició de valors configurables s’ha optat per definir queindica cada grup.
Diode Voltage DropDiode: valor mínim en que el diode deixa passar la corrent(V)
Initial Position_n: posició inicial, quan T=0 (0: no deixa passar la corrent; 1:deixa passar la corrent)
Current Flag_n: 0 si no volem saber quina es la intensitat que passa pel element i1 si la volem saber.
n: indica que es qualsevol diode dels esquemes representats en les figures de sota,la enumeració es correspon amb el diode.
Fig. 2.1.4.4.13: figura que representa un pont de diodesmonofàsic
Fig. 2.1.4.4.14: figura que representa un pont de diodestrifàsic
Fig. 2.1.4.4.15: figura representativa del pont de diodesmonofàsic tal i com el representa el PSIMElements->Power->Switches->BDIODE_1
Fig. 2.1.4.4.16: figura representativa del pont de diodestrifàsic tal i com el representa el PSIMElements->Power->Switches->BDIODE_2

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 30 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Rectificadors de corrent mitjançant ponts de tiristors
Altres ponts rectificadors ens permeten un control més acurat de la tensió encontinu, es el cas dels ponts amb tiristors. En les següents figures podrem veure quinssón i com els representa el PSIM.
Com s’ha vist anteriorment per accionar els tiristors també ens hemd’ajudar dels controladors dels interruptors.
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Voltage Drop: valor mínim en que el transistor deixa passar la corrent (V)
Initial Position_n: posició inicial, quan T=0 (0: no deixa passar la corrent; 1:deixa passar la corrent)
Current Flag_n: 0 si no volem saber quina es l’intensitat que passa per l’elementi 1 si la volem saber.
n: indica el numero assignat a cada un dels tiristors contingut en els esquemesrepresentats a les figures de sota.
Fig. 2.1.4.4.17: figura que representa un pont de tiristorsmonofàsic
Fig. 2.1.4.4.18: figura que representa un pont de tiristorstrifàsic
Fig. 2.1.4.4.19: figura representativa del pont de tiristorsmonofàsic tal i com el representa el PSIMElements->Power->Switches->BTHY_1
Fig. 2.1.4.4.20: figura representativa del pont de tiristorstrifàsic tal i com el representa el PSIMElements->Power->Switches-> BTHY_2

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 31 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Inversors d’ona
Els inversors d’ona són elements encarregats de convertir una corrent continua auna alterna.
La possibilitat de poder fer servir aquest element com a ondulador de corrent enspermet de canviar els paràmetres (tensió, freqüència, intensitat, ...) de la corrent alternaa la nostra voluntat. Primer convertint-la corrent alterna en continua amb un rectificadori desprès convertint-la en alterna, altre cop mitjançant el inversor.
Per accionar els transistors també ens hem d’ajudar dels controladors deinterruptors.
Elements->Other->Switch Controllers com per exemple el ONCTRL , o beel gating Elements->Power->Switches->GATING
Diode Voltage DropDiode: valor mínim en que el diode deixa passar la corrent(V)
Initial Position_n: posició inicial, quan T=0 (0: no deixa passar la corrent; 1:deixa passar la corrent)
Current Flag_n: 0 si no volem saber quina es la intensitat que passa pel element i1 si la volem saber.
n: indica el numero assignat a cada un dels transistor contingut en els esquemesrepresentats a les figures de sota
Fig. 2.1.4.4.21: figura que representa un inversor decorrent, en aquest cas el VSI
Fig. 2.1.4.4.22: figura que representa un inversor decorrent, en aquest cas el CSI
Fig. 2.1.4.4.23: figura representativa del pont de tiristorsmonofasic tal i com el representa el PSIMElements->Power->Switches->BTHY_1
Fig. 2.1.4.4.24: figura representativa del pont de tiristorstrifàsic tal i com el representa el PSIMElements->Power->Switches-> BTHY_2
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 32 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.4.25: figura representativa del gating tal i com elrepresenta el PSIMElements->Power->Switches->GATING
Fig. 2.1.4.4.26: figura representativa de l’amplificadoroperacional tal i com el representa el PSIMElements->Control->OP_AMP
Fig. 2.1.4.4.27: figura representativa de l’amplificadoroperacional amb la terra accessible tal i com el representa elPSIMElements->Control->OP_AMP2
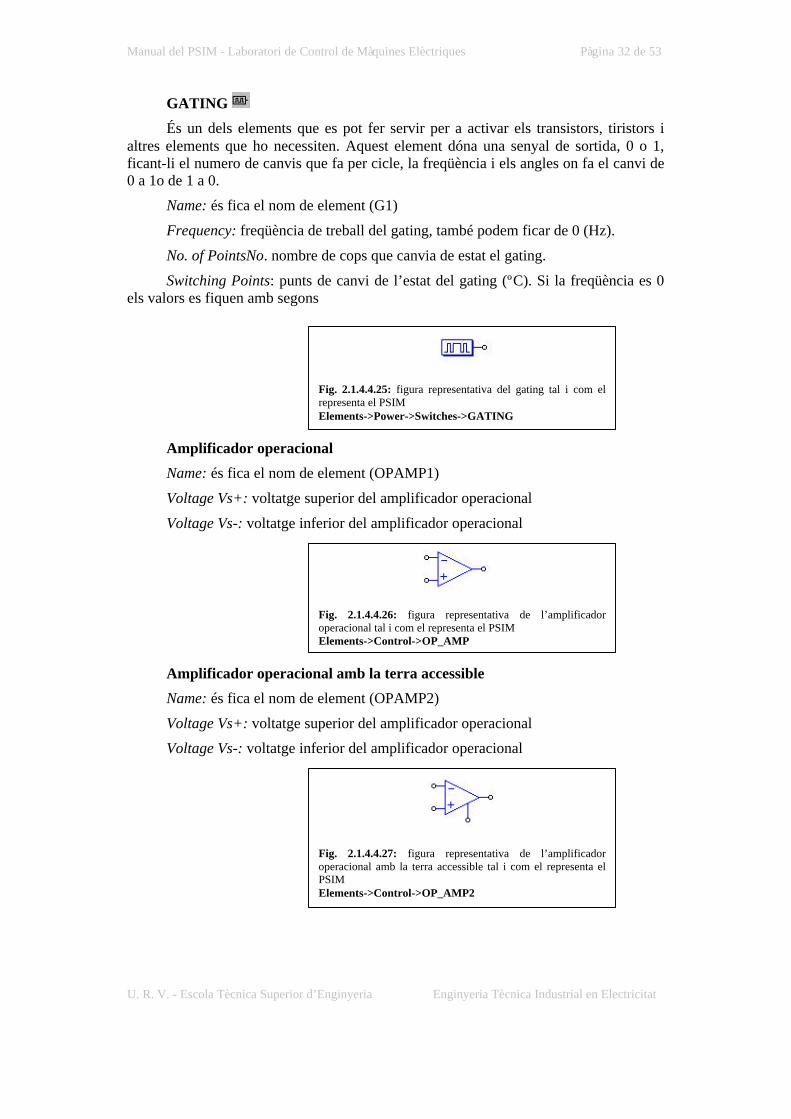
GATING
És un dels elements que es pot fer servir per a activar els transistors, tiristors ialtres elements que ho necessiten. Aquest element dóna una senyal de sortida, 0 o 1,ficant-li el numero de canvis que fa per cicle, la freqüència i els angles on fa el canvi de0 a 1o de 1 a 0.
Name: és fica el nom de element (G1)
Frequency: freqüència de treball del gating, també podem ficar de 0 (Hz).
No. of PointsNo. nombre de cops que canvia de estat el gating.
Switching Points: punts de canvi de l’estat del gating (ºC). Si la freqüència es 0els valors es fiquen amb segons
Amplificador operacional
Name: és fica el nom de element (OPAMP1)
Voltage Vs+: voltatge superior del amplificador operacional
Voltage Vs-: voltatge inferior del amplificador operacional
Amplificador operacional amb la terra accessible
Name: és fica el nom de element (OPAMP2)
Voltage Vs+: voltatge superior del amplificador operacional
Voltage Vs-: voltatge inferior del amplificador operacional

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 33 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.4.28: figura representativa de l’amplificadoroperacional amb la terra accessible i polaritat inversa, tal i comel representa el PSIMElements->Control->OP_AMP3
Amplificador operacional amb la terra accessible i polaritat inversa
Name: és fica el nom de element (OPAMP3)
Voltage Vs+: voltatge superior del amplificador operacional
Voltage Vs-: voltatge inferior del amplificador operacional
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 34 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
2.1.4.5 Màquines motrius elèctriques i càrregues mecàniques
Les màquines elèctriques són les encarregades de transformar la energia elèctricaen mecànica i a l’inrevés. Això ens permet de realitzar un treball productiu amb laenergia elèctrica.
Les càrregues mecàniques són per a simular els esforços mecànics que sofreixenles màquines elèctriques.
Aquests elements es poden trobar a la part del menú:
Elements->Power-> Motor drive.
Motor d’inducció trifàsic
El motor d’inducció trifàsic te la connexió del debanat del estator en estrella.
Name: es fica el nom del element (IM1)
Rs (stator): resistència del bobinat del estator (Ω)
Ls (stator): inductància del bobinat del estator (H)
Rr (rotor): resistència del bobinat del rotor (Ω)
Lr (rotor): inductància del bobinat del rotor (H)
Lm (magnetizing): inductància de magnetització(H)
No. of Poles P: nombre de pols
Moment of Inertia: moment d’inèrcia (Kg·m2)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 35 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.5.1: figura representativa del motor d’inducció tal icom el representa el PSIMElements->Power->Motor Drive->INDM_3S
Fig. 2.1.4.5.2: figura representativa del motor d’inducció ambopció de connectar el neutre tal i com el representa el PSIMElements->Power->Motor Drive->INDM_3SN
Torque Flag: 0 si no volem saber quin es el parell motor i 1 si el volem saber.
Master/Slave Flag: 0 si volem que funcioni com a generador (no es possible en laversió d’avaluació) i 1 si el volem com a motor.
Motor d’inducció trifàsic, amb opció de connectar el neutre.
El motor d’inducció trifàsic te la connexió dels debanats del estator en estrella.
Name: es fica el nom del element (IM1)
Rs (stator): resistència del bobinat del estator (Ω)
Ls (stator): inductància del bobinat del estator (H)
Rr (rotor): resistència del bobinat del rotor (Ω)
Lr (rotor): inductància del bobinat del rotor (H)
Lm (magnetizing): inductància de magnetització(H)
Ro (common mode): resistència del node comú (Ω)
Lo (common mode): inductància del node comú (H)
Co (common mode): capacitància del node comú (F)
No. of Poles P: nombre de pols
Moment of Inertia: moment d’inèrcia (Kg·m2)
Torque Flag: 0 si no volem saber quin es el parell motor i 1 si el volem saber.
Master/Slave Flag: 0 si volem que funcioni com a generador (no es possible en laversió d’avaluació) i 1 si el volem com a motor.

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 36 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.5.3: figura representativa de la màquina de correntcontinua tal i com el representa el PSIMElements->Power->Motor Drive->DC_M
Maquina de corrent continua.
Name: es fica el nom del element (DC1)
Ra (armature): resistència del bobinat del induït(Ω)
La (armature): inductància del bobinat del induït(H)
Rf (field): resistència del bobinat del inductor(Ω)
Lf (field): inductància del bobinat del inductor(Ω)
Moment of Inertia: moment d’inèrcia (Kg·m2)
Vt (rated): tensió nominal de la màquina (V)
Ia (rated): intensitat nominal del induït (A)
n (rated): velocitat nominal (min-1)
If (rated): intensitat nominal del inductor (A)
Torque Flag: 0 si no volem saber quin es el parell motor i 1 si el volem saber.
Master/Slave Flag: 0 si volem que funcioni com a generador (no es possible en laversió d’avaluació) i 1 si el volem com a motor.
Maquina sincrona
Name: es fica el nom del element (PMSM3)
Rs (stator resistance): resistència del bobinat del estator (Ω)
Ld (d-axis ind.): inductància en el eix del estator (H)
Lq (q-axis ind.): inductància dels eixos quan estan el rotor i el estator alineats.
Vpk / krpm: relació tensió/velocitat que ens ha de indicar el fabricant del motor.
No. of Poles P: numero de pols
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 37 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
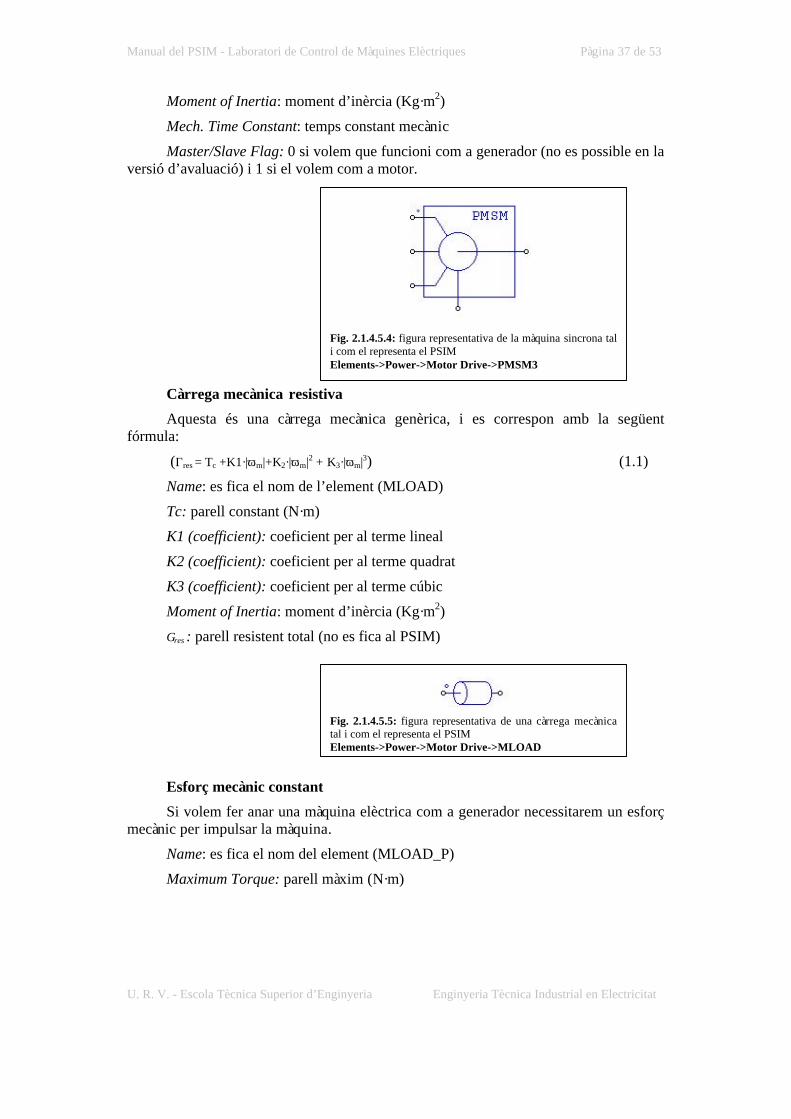
Fig. 2.1.4.5.4: figura representativa de la màquina sincrona tali com el representa el PSIMElements->Power->Motor Drive->PMSM3
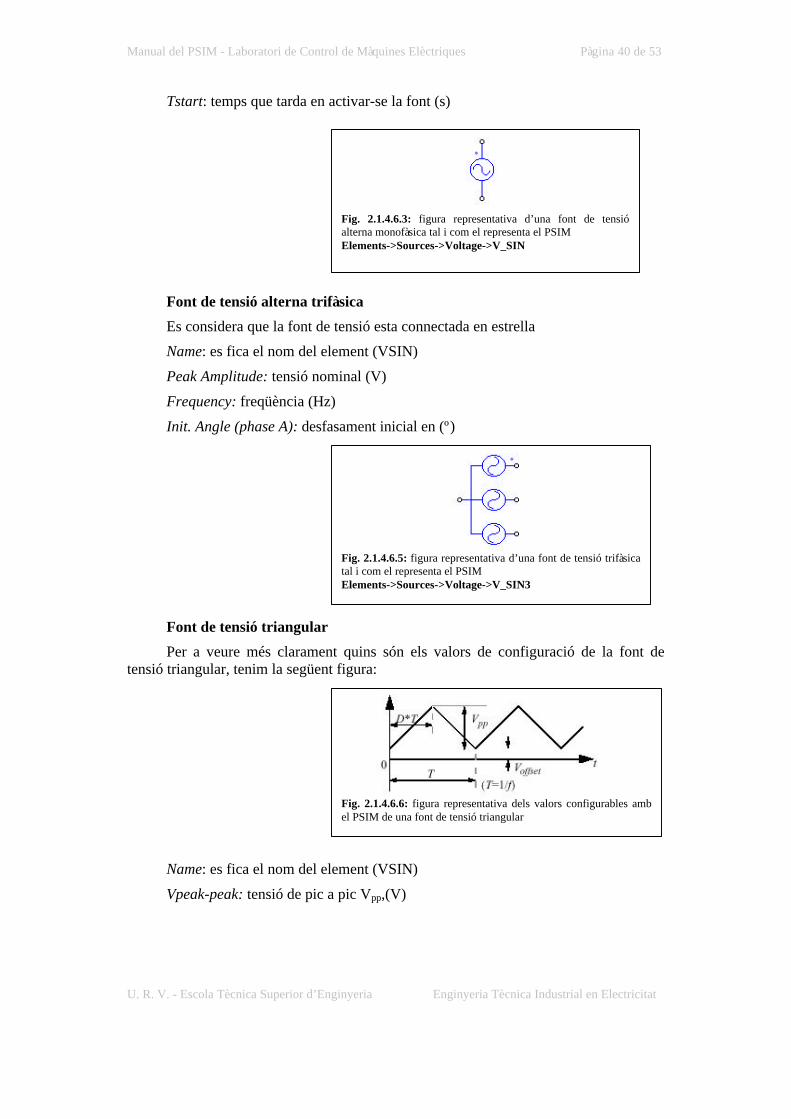
Fig. 2.1.4.5.5: figura representativa de una càrrega mecànicatal i com el representa el PSIMElements->Power->Motor Drive->MLOAD
Moment of Inertia: moment d’inèrcia (Kg·m2)
Mech. Time Constant: temps constant mecànic
Master/Slave Flag: 0 si volem que funcioni com a generador (no es possible en laversió d’avaluació) i 1 si el volem com a motor.
Càrrega mecànica resistiva
Aquesta és una càrrega mecànica genèrica, i es correspon amb la següentfórmula:
(Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Name: es fica el nom de l’element (MLOAD)
Tc: parell constant (N·m)
K1 (coefficient): coeficient per al terme lineal
K2 (coefficient): coeficient per al terme quadrat
K3 (coefficient): coeficient per al terme cúbic
Moment of Inertia: moment d’inèrcia (Kg·m2)
Γres : parell resistent total (no es fica al PSIM)
Esforç mecànic constant
Si volem fer anar una màquina elèctrica com a generador necessitarem un esforçmecànic per impulsar la màquina.
Name: es fica el nom del element (MLOAD_P)
Maximum Torque: parell màxim (N·m)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 38 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.5.6: figura representativa d’una esforç mecànic tal icom el representa el PSIMElements->Power->Motor Drive-> MLOAD_P
Fig. 2.1.4.5.7: figura representativa d’una esforç mecànic tal icom el representa el PSIMElements->Power->Motor Drive-> MLOAD_T
Fig. 2.1.4.5.8: figura representativa d’una esforç mecànic tal icom el representa el PSIMElements->Power->Motor Drive-> MLOAD_P
Base Speed (in rpm): velocitat (min-1)
Moment of Inertia: moment d’inèrcia (Kg·m2)
Parell resistent mecànic constant
Name: es fica el nom del element (MLOAD_T)
Tc: parell constant (N·m)
Moment of Inertia: moment d’inèrcia (Kg·m2)
Velocitat mecànica constant
Name: es fica el nom del element (MLOAD_P)
Constant Speed (rpm): velocitat constant(min-1)
Moment of Inertia: moment d’inèrcia (Kg·m2)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 39 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.6.1: figura representativa d’una font de tensiócontínua tal i com el representa el PSIMElements->Sources->Voltage->V_DC1
Fig. 2.1.4.6.2: figura representativa d’una font de tensió contínua(vist com a una pila) tal i com el representa el PSIMElements->Sources->Voltage->V_DC_CELL
2.1.4.6 Fonts de tensió
Per a fer anar les màquines elèctriques necessitem una font de energia elèctrica,són les fonts de tensió.
Font de tensió continua
Name: es fica el nom del element (VDC1)
VDC: tensió de la corrent continua.(V)
Font de tensió continua(vist com a una pila)
Name: es fica el nom del element (VDC1)
VDC_CELL: tensió de la corrent continua.(V)
Font de tensió alterna monofàsica
Name: es fica el nom del element (VSIN)
Peak Amplitude: tensió de pic (V)
Frequency: freqüència (Hz)
Phase Angle: desfasament inicial en (º)
DC Offset: tensió inicial(V)
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 40 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.6.3: figura representativa d’una font de tensióalterna monofàsica tal i com el representa el PSIMElements->Sources->Voltage->V_SIN
Fig. 2.1.4.6.5: figura representativa d’una font de tensió trifàsicatal i com el representa el PSIMElements->Sources->Voltage->V_SIN3
Fig. 2.1.4.6.6: figura representativa dels valors configurables ambel PSIM de una font de tensió triangular
Tstart: temps que tarda en activar-se la font (s)
Font de tensió alterna trifàsica
Es considera que la font de tensió esta connectada en estrella
Name: es fica el nom del element (VSIN)
Peak Amplitude: tensió nominal (V)
Frequency: freqüència (Hz)
Init. Angle (phase A): desfasament inicial en (º)
Font de tensió triangular
Per a veure més clarament quins són els valors de configuració de la font detensió triangular, tenim la següent figura:
Name: es fica el nom del element (VSIN)
Vpeak-peak: tensió de pic a pic Vpp,(V)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 41 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.6.7: figura representativa d’una font de tensió triangulartal i com el representa el PSIMElements->Sources->Voltage->VTRI
Fig. 2.1.4.6.8: figura representativa dels valors configurables ambel PSIM de una font de tensió d’ona quadrada
Fig. 2.1.4.6.9: figura representativa d’una font de tensió contínua(vist com a una pila) tal i com el representa el PSIMElements->Sources->Voltage->VSQU
Frequency: freqüència f (Hz)
Duty Cycle: temps que tarda a obtenir la tensió de pic D·T(s)
DC Offset: tensió mínima Voffset, (V)
Tstart: temps que tarda a activar-se la font (s)
Font de tensió d’ona quadrada
Per a veure més clarament quins són els valors de configuració de la font detensió d’ona quadrada, tenim la següent figura:
Name: es fica el nom de l’element (VSQU)
Vpeak-peak: tensió de pic a pic Vpp,(V)
Frequency: freqüència f (Hz)
Duty Cycle: temps que passa de la tensió de cresta a la tensió mínima D·T(s)
DC Offset: tensió mínima Voffset, (V)
Tstart: temps que tarda a activar-se la font (s)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 42 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.6.10: figura representativa dels valors configurables ambel PSIM de una font de tensió d’ona quadrada
Fig. 2.1.4.6.11: figura representativa d’una font de tensió d’unimpuls tal i com el representa el PSIMElements->Sources->Voltage->VSTEP
Fig. 2.1.4.6.12: figura representativa d’una font de tensió de dosimpulsos tal i com el representa el PSIMElements->Sources->Voltage->VSTEP1
Font de tensió d’un impuls
Per a veure més clarament quins són els valors de configuració de la font detensió d’un impuls, tenim la següent figura:
Name: es fica el nom del element (VSTEP)
Vstep: valor de la tensió (funció esglaó) (V)
Tstep: temps que tarda a arribar l’esglaó (s)
Font de tensió de dos impulsos
Name: es fica el nom del element (VSTEP)
Vstep1: valor de la tensió (funció esglaó) (V)
Vstep2: valor de la tensió (funció esglaó) (V)
Tstep: temps que tarda a arribar al primer esglaó (s)
T_transition: temps que tarda a arribar al segon esglaó (s)
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 43 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
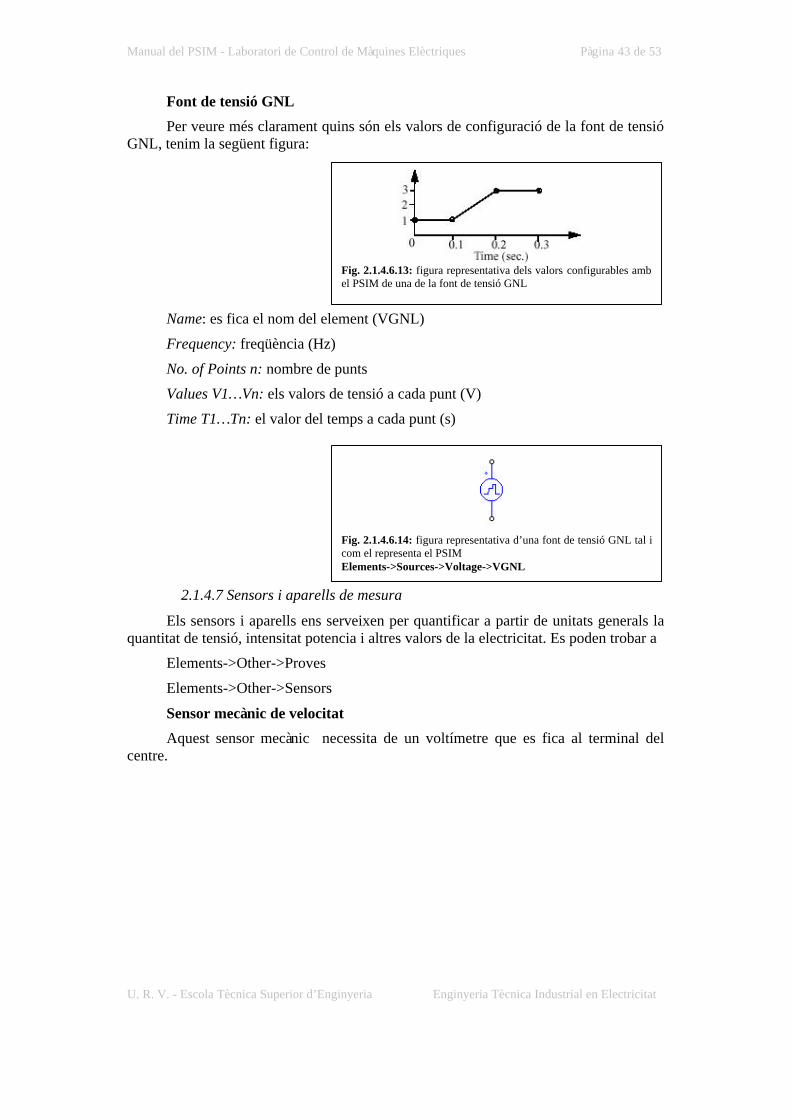
Fig. 2.1.4.6.13: figura representativa dels valors configurables ambel PSIM de una de la font de tensió GNL
Fig. 2.1.4.6.14: figura representativa d’una font de tensió GNL tal icom el representa el PSIMElements->Sources->Voltage->VGNL
Font de tensió GNL
Per veure més clarament quins són els valors de configuració de la font de tensióGNL, tenim la següent figura:
Name: es fica el nom del element (VGNL)
Frequency: freqüència (Hz)
No. of Points n: nombre de punts
Values V1…Vn: els valors de tensió a cada punt (V)
Time T1…Tn: el valor del temps a cada punt (s)
2.1.4.7 Sensors i aparells de mesura
Els sensors i aparells ens serveixen per quantificar a partir de unitats generals laquantitat de tensió, intensitat potencia i altres valors de la electricitat. Es poden trobar a
Elements->Other->Proves
Elements->Other->Sensors
Sensor mecànic de velocitat
Aquest sensor mecànic necessita de un voltímetre que es fica al terminal delcentre.

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 44 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.7.1: figura representativa d’un sensor mecànic develocitat tal i com el representa el PSIMElements->Other->Sensors-> WSEN
Fig. 2.1.4.7.2: figura representativa d’un sensor mecànic deparell tal i com el representa el PSIMElements-> Other->Sensors-> TSEN1
Fig. 2.1.4.7.3: figura representativa d’un voltímetre per a mesurarla tensió en un punt tal i com el representa el PSIMElements-> Other->Proves-> VP
Fig. 2.1.4.7.4: figura representativa d’un amperímetre per amesurar la intensitat de forma dinàmica en un punt tal i com elrepresenta el PSIMElements-> Other->Proves-> IP1
Name: es fica el nom del element (WSEN1)
Gain: Guany o relació entre1min −
V
Sensor mecànic del parell
Aquest sensor mecànic necessita d’un voltímetre que es fica al terminal delcentre
Name: es fica el nom del element (TSEN1)
Gain: Guany o relació entreΓV
Voltímetre per a mesurar la tensió en un punt
Name: es fica el nom del element (VP)
Amperímetre per a mesurar la intensitat de forma dinàmica
Name: es fica el nom del element (IP)

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 45 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.7.6: figura representativa d’un Voltímetre per a mesurarla tensió en corrent contínua tal i com el representa el PSIMElements-> Other->Proves-> V_DC
Fig. 2.1.4.7.5: figura representativa d’un voltímetre per a mesurarla tensió en dos punts tal i com el representa el PSIMElements-> Other->Proves-> VP2
Fig. 2.1.4.7.7: figura representativa d’un Voltímetre per a mesurarla tensió en corrent alterna tal i com el representa el PSIMElements-> Other->Proves-> V_AC
Fig. 2.1.4.7.8: figura representativa d’un amperimetre per a mesurarla intensitat en corrent contínua tal i com el representa el PSIMElements-> Other->Proves-> A_DC
Voltímetre per a mesurar la tensió en dos punts
Name: es fica el nom del element (VP2)
Voltímetre per a mesurar la tensió en corrent contínua
Name: es fica el nom del element (V_DC1)
Cut-off Frequency: freqüència a la que deixa de analitzar la tensió (Hz)
Voltímetre per a mesurar la tensió en corrent alterna
Name: es fica el nom del element (VPAC1)
Op. Frequency: freqüència a la qual s’analitza el circuit
Cut-off Frequency: rang de freqüència a la que deixa d’analitzar la tensió (Hz)
Amperímetre per mesurar la intensitat en corrent contínua
Name: es fica el nom de l’element (ADC1)
Cut-off Frequency: freqüència a la que deixa d’analitzar la tensió (Hz)
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 46 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
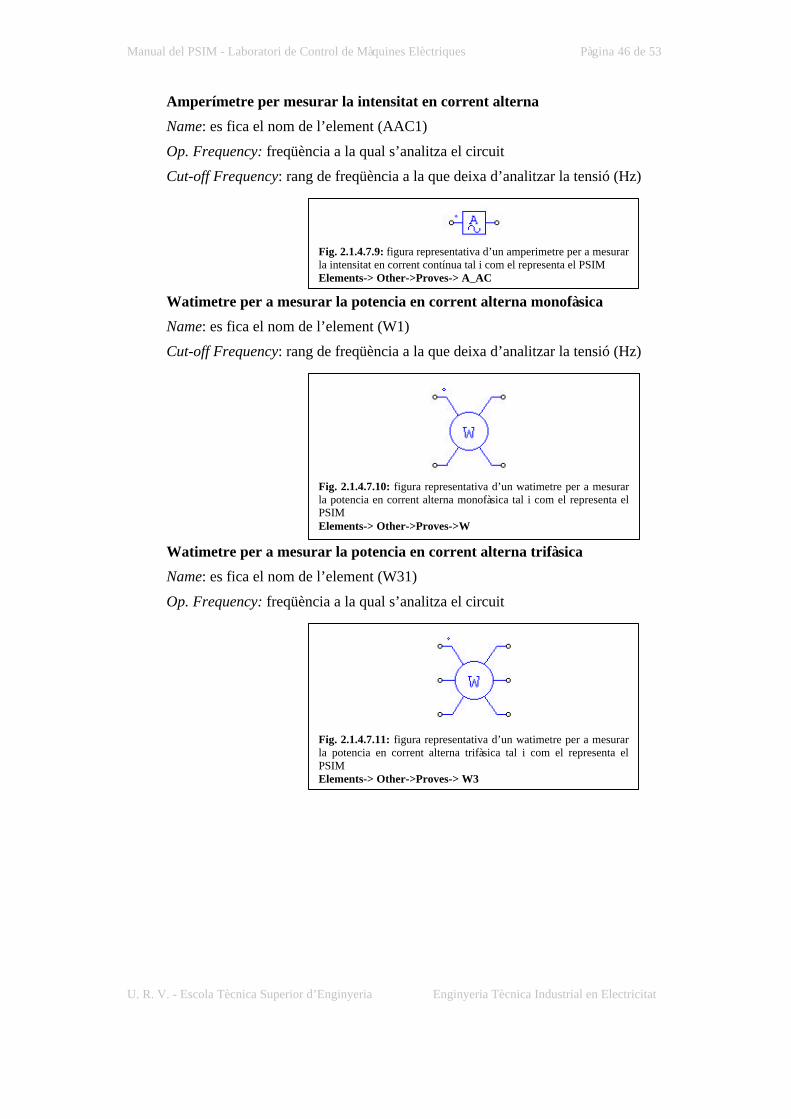
Fig. 2.1.4.7.9: figura representativa d’un amperimetre per a mesurarla intensitat en corrent contínua tal i com el representa el PSIMElements-> Other->Proves-> A_AC
Fig. 2.1.4.7.10: figura representativa d’un watimetre per a mesurarla potencia en corrent alterna monofàsica tal i com el representa elPSIMElements-> Other->Proves->W
Fig. 2.1.4.7.11: figura representativa d’un watimetre per a mesurarla potencia en corrent alterna trifàsica tal i com el representa elPSIMElements-> Other->Proves-> W3
Amperímetre per mesurar la intensitat en corrent alterna
Name: es fica el nom de l’element (AAC1)
Op. Frequency: freqüència a la qual s’analitza el circuit
Cut-off Frequency: rang de freqüència a la que deixa d’analitzar la tensió (Hz)
Watimetre per a mesurar la potencia en corrent alterna monofàsica
Name: es fica el nom de l’element (W1)
Cut-off Frequency: rang de freqüència a la que deixa d’analitzar la tensió (Hz)
Watimetre per a mesurar la potencia en corrent alterna trifàsica
Name: es fica el nom de l’element (W31)
Op. Frequency: freqüència a la qual s’analitza el circuit

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 47 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.4.7.12: figura representativa Contador de reactiva per amesurar la potencia reactiva en corrent alterna monofàsica tal i comel representa el PSIMElements-> Other->Proves-> VAR
Fig. 2.1.4.7.13: figura representativa d’un contador de reactiva pera mesurar la potencia reactiva en corrent alterna trifàsica tal i comel representa el PSIMElements-> Other->Proves-> VAR
Comptador de reactiva per a mesurar la potencia reactiva en corrent alternamonofàsica
Name: es fica el nom de l’element (VAR1)
Cut-off Frequency: rang de freqüència a la que deixa d’analitzar la tensió (Hz)
Comptador de reactiva per a mesurar la potencia reactiva en corrent alternatrifàsica
Name: es fica el nom del element (VAR1)
Cut-off Frequency: rang de freqüència a la que deixa d’analitzar la tensió (Hz)
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 48 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
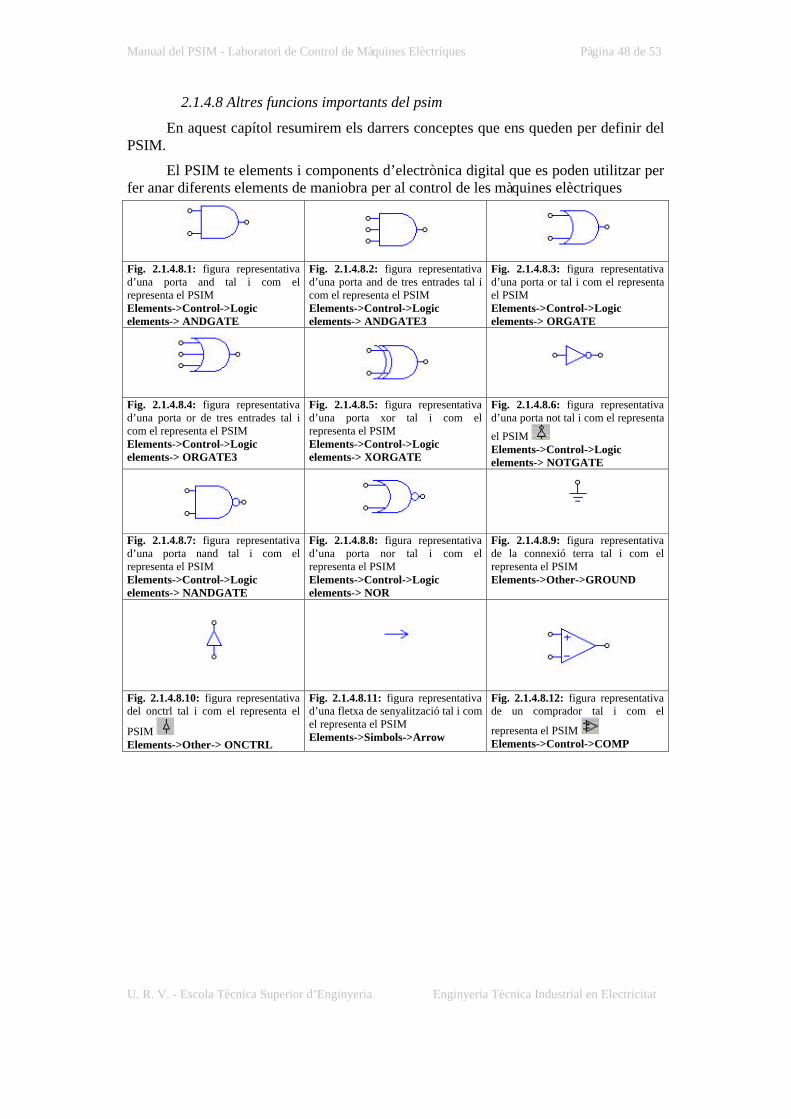
2.1.4.8 Altres funcions importants del psim
En aquest capítol resumirem els darrers conceptes que ens queden per definir delPSIM.
El PSIM te elements i components d’electrònica digital que es poden utilitzar perfer anar diferents elements de maniobra per al control de les màquines elèctriques
Fig. 2.1.4.8.1: figura representativad’una porta and tal i com elrepresenta el PSIMElements->Control->Logicelements-> ANDGATE
Fig. 2.1.4.8.2: figura representativad’una porta and de tres entrades tal icom el representa el PSIMElements->Control->Logicelements-> ANDGATE3
Fig. 2.1.4.8.3: figura representativad’una porta or tal i com el representael PSIMElements->Control->Logicelements-> ORGATE
Fig. 2.1.4.8.4: figura representativad’una porta or de tres entrades tal icom el representa el PSIMElements->Control->Logicelements-> ORGATE3
Fig. 2.1.4.8.5: figura representativad’una porta xor tal i com elrepresenta el PSIMElements->Control->Logicelements-> XORGATE
Fig. 2.1.4.8.6: figura representativad’una porta not tal i com el representa
el PSIM Elements->Control->Logicelements-> NOTGATE
Fig. 2.1.4.8.7: figura representativad’una porta nand tal i com elrepresenta el PSIMElements->Control->Logicelements-> NANDGATE
Fig. 2.1.4.8.8: figura representativad’una porta nor tal i com elrepresenta el PSIMElements->Control->Logicelements-> NOR
Fig. 2.1.4.8.9: figura representativade la connexió terra tal i com elrepresenta el PSIMElements->Other->GROUND
Fig. 2.1.4.8.10: figura representativadel onctrl tal i com el representa el
PSIM Elements->Other-> ONCTRL
Fig. 2.1.4.8.11: figura representativad’una fletxa de senyalització tal i comel representa el PSIMElements->Simbols->Arrow
Fig. 2.1.4.8.12: figura representativade un comprador tal i com el
representa el PSIM Elements->Control->COMP

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 49 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.5.1: figura representativa de que hi fiquem unsparàmetres de simulació definits, tal i com el representa elPSIMSimulate->Simulation Control
2.1.5 SIMULATE
Simulation control és on es fiquen els paràmetres per la simulació delcomportament de les màquines
Time Step: interval de temps en que es fan els càlculs, és a dir cada vegada quetroba el valors.
Total Time: temps final de simulació(s)
Print Time: temps inicial de simulació(s)
Print Step: cada quants punts es graven en el fitxer de text.
Load Flag: recupera el fitxer dels paràmetres de temps anterior, si es que s’hangravat (fitxer *.ssf)
Save Flag : grava a un fitxer els paràmetres de temps que es seleccionen per arealitzar la simulació (fitxer *.ssf)
Run PSIM (F8) realitza tots els càlculs del circuit
Run SIMVIEW (Alt+F8) visualitza els resultats (SIMVIEW)
View Netlist File mostra els valors en mode text de tots els elementsseleccionats.
2.1.6 OPTIONS
Settings valors de configuració com la reixa el color del text, i
altres ajudes al dibuix
Auto-run SIMVIEW si esta activada i els valors del circuit son correctes
executarà automàticament el SIMVIEW
2.1.7 WINDOW
New Window fa una altra finestra per executar el PSIM
Cascade presenta les finestres actives en tipus cascada
Tile presenta les finestres actives en tipus mosaic
Arrange Icons fa una alineació de les icones

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 50 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
2.2 LLISTAT DELS MENÚS DEL SIMVIEW
Aquest és el programa encarregat d’agafar el fitxer generat pel PSIM i dibuixar-lotot seguint unes escales predeterminades i uns valors que els hi donarem.
2.2.1 File menu
Open obre un fitxer generat pel PSIM(fitxer *.txt)
Open Binary obre un fitxer en binari SIMVIEW (fitxer *.fft)
Merge opció molt útil que ens permet la visualització de dues
gràfiques generades de diferents esquemes a la vegada.
primer en tenim una i desprès carreguem d’altres
(fitxers *.txt)
Re-Load Data recupera tots els valors numèrics del fitxer tot
mantenint l’escala
Save guarda el fitxer generat per el PSIM en binari
(fitxer *.fft)
Save As guarda el fitxer generat per el PSIM en binari.
Preguntant-nos on el volem guardar i amb quin nom
(fitxer *.fft)
Save Settings guarda la configuració del PSIM
Print imprimeix el gràfic
Print Setup configura la impressora
Print Page Setup canvia la configuració de com s’ha d’imprimir la
pàgina
Print Preview vista prèvia de la impressió
Exit surt del SIMVIEW
2.2.2 Edit menu
Copy to Clipboard copia el resultat gràfic del càlcul al portapapers
Edit Title edita el títol de la gràfica que sortirà per la impressora

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 51 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Fig. 2.1.6.1: figura representativa del menú de selecció tal icom el representa el SIMVIEW
2.2.3 Axis menu
X Axis canvia els valors de visualització de l’eix de les X(s)
Y Axis canvia els valors de visualització de l’eix de les Y(s)
Axis Label Setting canvia la mida de la lletra del gràfic
2.2.4 Screen menu
Add/Delete Curves afegir o treure variables
Add Screen afegeix una finestra nova
Delete Screen esborra una finestra
Cada cop que seleccionem una variable ens surt una finestreta de visualitzacióbastant didàctica, com es pot observar en la següent figura
Com es veu en la figura el SIMVIEW ens permet de realitzar operacions entrevariables amb notació algebraica, i les permeses que es descriuen a continuació
+ suma
- resta
* multiplicació
/ divisió
^ potencia (elevar un numero a un altre)
SQRT arrel quadrada
SIN sinus

Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 52 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
COS cosinus
TAN tangent
ATAN arctangent
EXP exponencial
LOG logaritme de base e
LOG10 logaritme de base 10
ABS valor absolut
SIGN valor de positiu o negatiu o zero
AVG promig de la variable
INT valor enter del numero
Per exemple, si tenim dues variables com son tensió i intensitat podem ficarV1*I1 i a la corba ens sortirà el resultat de multiplicar cada punt
2.2.5 Measure menu
És un menú important per a nosaltres, ja que ens permet analitzar les corbes pas apas
Measure si pitgem aquesta opció se’ns obre una altra finestra en
que podem mesurar els diferents valors variables de les
corbes.
Desprès s’ha clicar al damunt de la variable, a la zona
del eix per analitzar la corba.
Max troba el valor màxim de tota la corba i de la variable
seleccionada
Min troba el valor mínim de tota la corba i de la variable
seleccionada
Next Max troba el següent màxim (de dreta a esquerra)
Next Min troba el següent mínim (de dreta a esquerra)
Avg calcula la mitjana aritmètica de tots els punts
Avg(|x|) calcula la mitjana aritmètica de tots els punts en valor
absolut
Manual del PSIM - Laboratori de Control de Màquines Elèctriques Pàgina 53 de 53
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
rms calcula el valor eficaç.
Per a que calculi el rms correctament hem de fer servir tot un cicle complet, jaque sinó tindrem un error; per exemple, si tenim el cas de una corrent senoidal amb unafreqüència de 50 Hz un període complert serien 0.02 segons.
Aquest resultat surt de la fórmula
Tf
1= (2.2.5.1)
2.2.6 View menu
Zoom zoom per apropar
Redraw torna a dibuixar les dades
Toolbar activa o desactiva la barra de icones
Status Bar activa o desactiva la barra d’estat
2.2.7 Option menu
FFT canvia el anàlisis dels valors de les corbes temporals a
expressar-les en funció de la freqüència
Time canvia un anàlisis en funció del temps
Set Text Fonts configura el text
Set Curves selecciona la forma dels punts.
Set Background canvia el fons de pantalla, blanc o negre
Grid activa o desactiva la reixa.
Color selecciona si volem veure les corbes en color o en
escala de grisos
2.2.8 Label menu
En aquesta part del menú podem escollir les diferents opcions per definir punts enconcret o mostrar un nom més clar de les corbes.
Text fica un text a les corbes
Line dibuixa una línia a la gràfica
Dotted Line dibuixa una línia puntejada a la gràfica
Arrow dibuixa una fletxa a la gràfica

Manual de Pràctiques de Màquines Elèctriques enrègim dinàmic, Mitjançant PSIM
AUTOR: Albert Cid CarbóDIRECTOR: Lluis Guasch Pesquer
PONENT: Lluis Guasch PesquerDATA 6 / 02

I
ÍNDEX
A PRÒLEG ....................................................................................................................................................................1
A.1 OBJECTE DEL PROJECTE ...............................................................................................................................1 A.2 POSSIBLES SOLUCIONS I SOLUCIÓ ADOPTADA ......................................................................................1
A.2.1 Amb visió i realització de les maniobres directament sobre les màquines ...................................................1 A.2.2 Mitjançant l’ordinador amb altres programes que no son el PSIM...............................................................1
A.3 SOLUCIÓ ADOPTADA.....................................................................................................................................1 A. 4 REALITZACIÓ DE LES PRÀCTIQUES ..........................................................................................................1
1 PRÀCTICA - 1............................................................................................................................................................4 1.1 ENUNCIAT - POSTA EN MARXA DIRECTA DE UN MOTOR D’INDUCCIÓ .............................................4
1.1.1 OBJECTIU ....................................................................................................................................................4 1.1.2 ESQUEMA I VALORS INICIALS...............................................................................................................4
1.1.2.1 Aparells a utilitzar ..................................................................................................................................4 1.1.2.2 Esquema .................................................................................................................................................5
1.1.3 Tasques a realitzar per l’alumne ....................................................................................................................5 1.1.3.1 Posta en marxa en buit ............................................................................................................................5 1.1.3.2 Posta en marxa a parell resistent constant...............................................................................................5 1.1.3.3 Posta en marxa amb un parell ventilador ................................................................................................6 1.1.3.4 Qüestions ................................................................................................................................................6
1.2 INFORME DE POSTA EN MARXA DIRECTA DE UN MOTOR D’INDUCCIÓ ...........................................7 1.2.1 Introducció.....................................................................................................................................................7 1.2.2 Posta en marxa en buit...................................................................................................................................8 1.2.3 Posta en marxa a parell resistent constant......................................................................................................8 1.2.4 Posta en marxa amb un parell ventilador.....................................................................................................11 1.2.5 Qüestions .....................................................................................................................................................12
2 PRÀCTICA - 2..........................................................................................................................................................14 2.1 POSTA EN MARXA D’UN MOTOR D’INDUCCIÓ AMB LA TENSIÓ REDUÏDA A L'ESTATOR...........14
2.1.1 OBJECTIU ..................................................................................................................................................14 2.1.2 ESQUEMA I VALORS INICIALS.............................................................................................................14
2.1.2.1 Aparells a utilitzar en el arranc amb resistències estatòriques ..............................................................14 2.1.2.2 Esquema a utilitzar en la posta en marxa amb resistències estatòriques ...............................................16 2.1.2.3 Aparells a utilitzar en la posta en marxa estrella - triangle ...................................................................16 2.1.2.4 Esquema a utilitzar en la posta en marxar estrella triangle ...................................................................17 2.1.2.5 Aparells a utilitzar en la posta en marxa kusa.......................................................................................17 2.1.2.6 Esquema a utilitzar en la posta en marxa kusa......................................................................................18
2.1.3 Tasques a realitzar per l’alumne ..................................................................................................................19 2.1.3.1 Posta en marxa a tensió reduïda al estator............................................................................................19 2.1.3.2 Posta en marxa kusa..............................................................................................................................19 2.1.3.3 Qüestions ..............................................................................................................................................19
2.2 INFORME DE POSTA EN MARXA DIRECTA DE UN MOTOR D’INDUCCIÓ .........................................20 2.2.1 Introducció...................................................................................................................................................20 2.2.2 Posta en marxa a tensió reduïda del estator.................................................................................................21 2.2.3 Posta en marxa kusa ....................................................................................................................................22 2.2.4 Qüestions .....................................................................................................................................................23
3 PRÀCTICA - 3..........................................................................................................................................................26 3.1 MÈTODES DE FRENAT D’UN MOTOR D’INDUCCIÓ................................................................................26
3.1.1 OBJECTIU ..................................................................................................................................................26 3.1.2 ESQUEMA I VALORS INICIALS.............................................................................................................26
3.1.2.1 Aparells a utilitzar en el frenat a rotor lliure .........................................................................................26 3.1.2.2 Esquema a utilitzar en el en el frenat a rotor lliure ...............................................................................27 3.1.2.3 Aparells a utilitzar el frenat a contracorrent..........................................................................................27 3.1.2.4 Esquema a utilitzar en el frenat a contracorrent....................................................................................28 3.1.2.5 Aparells a utilitzar en el frenat amb corrent continua ...........................................................................28 3.1.2.6 Esquema a utilitzar en el frenat amb corrent continua ..........................................................................29
3.1.3 Tasques a realitzar per l’alumne ..................................................................................................................29 3.1.3.1 Frenat a rotor lliure ...............................................................................................................................29 3.1.3.2 Frenat a contracorrent ...........................................................................................................................29 3.1.3.3 Frenat a corrent continua ......................................................................................................................30 3.1.3.3 Qüestions ..............................................................................................................................................30
II
3.2 INFORME DE MÈTODES DE FRENAT D’UN MOTOR D’INDUCCIÓ.......................................................31 3.2.1 Introducció...................................................................................................................................................31 3.2.2 Frenat a rotor lliure......................................................................................................................................31 3.2.3 Frenat a contracorrent..................................................................................................................................31 3.2.3 Frenat amb corrent continua ........................................................................................................................32 3.2.4 Conclusions generals ...................................................................................................................................33
4 PRÀCTICA - 4..........................................................................................................................................................36 4.1 DIFERÈNCIA ENTRE L’ANÀLISI D’UN MOTOR ASÍNCRON MITJANÇANT EL MÈTODE TRADICIONAL I EL PSIM ....................................................................................................................................36
4.1.1 OBJECTIU ..................................................................................................................................................36 4.1.2 ESQUEMA I VALORS INICIALS.............................................................................................................36
4.1.2.1 Assaig en curtcircuit. ............................................................................................................................36 4.1.2.2 Esquema a utilitzar en el assaig a curtcircuit ........................................................................................37 4.1.2.3 Aparells a utilitzar per a prendre mesures del motor en buit i a règim nominal....................................37 4.1.2.4 Esquema a utilitzar per agafar mesures del motor en buit o a règim nominal.......................................38
4.1.3 Tasques a realitzar per l’alumne ..................................................................................................................38 4.1.3.1 Diagrama del cercle ..............................................................................................................................38 4.1.3.2 Obtenció de mesures a règim nominal ..................................................................................................39 4.1.3.3 Qüestions ..............................................................................................................................................40
4.2 INFORME SOBRE DIFERÈNCIA ENTRE L’ANÀLISI D’UN MOTOR ASÍNCRON MITJANÇANT EL MÈTODE TRADICIONAL I EL PSIM...................................................................................................................41
4.2.1 Introducció...................................................................................................................................................41 4.2.2 Assaig en curtcircuit ....................................................................................................................................41 4.2.3 Assaig en buit ..............................................................................................................................................41 4.2.4 Construcció del diagrama del cercle ............................................................................................................41 4.2.6 Conclusions generals ...................................................................................................................................47
5 PRÀCTICA - 5..........................................................................................................................................................47 5.1 FUNCIONAMENT DELS INVERSORS EN FONT DE TENSIÓ (VSI) AMB UNA CÀRREGA R-L...........47
5.1.1 OBJECTIU ..................................................................................................................................................47 5.1.2 ESQUEMA I VALORS INICIALS.............................................................................................................47
5.1.2.1 Aparells a utilitzar en el inversor VSI amb dos i tres interruptors tancats simultàniament. ..................47 5.1.2.2 Esquema a utilitzar en el inversor VSI amb dos i tres interruptors tancats simultàniament..................48 5.1.2.3 Aparells a utilitzar l’ inversor VSI-PWM .............................................................................................48 5.1.2.4 Esquema del inversor VSI-PWM..........................................................................................................49
5.1.3 Tasques a realitzar per l’alumne ..................................................................................................................50 5.1.3.1 Inversor VSI amb dos i tres interruptors tancats simultàniament ..........................................................50 5.1.3.2 Inversor VSI-PWM...............................................................................................................................50
5.2 INFORME FUNCIONAMENT DELS INVERSORS AMB UNA CÀRREGA R-L.........................................52 5.2.1 Introducció...................................................................................................................................................52 5.2.2 VSI amb 2 interruptors tancats simultàniament ...........................................................................................54 5.2.3 VSI amb 3 interruptors tancats simultàniament ...........................................................................................58 5.2.3 VSI-PWM....................................................................................................................................................63
6 PRÀCTICA - 6..........................................................................................................................................................68 6.1 FUNCIONAMENT DELS INVERSORS AMB UN MOTOR D’INDUCCIÓ I UNA CARREGA MECÀNICA..................................................................................................................................................................................68
6.1.1 OBJECTIU ..................................................................................................................................................68 6.1.2 ESQUEMA I VALORS INICIALS.............................................................................................................68
6.1.2.1 Aparells a utilitzar en el esquema del VSI amb tres interruptors connectats simultàniament ...............68 6.1.2.2 Esquema a utilitzar en el en VSI amb tres interruptors connectats simultàn iament ..............................69 6.1.2.3 Aparells a utilitzar el inversor VSI-PWM.............................................................................................70 6.1.2.4 Esquema a utilitzar en VSI-PWM.........................................................................................................70
6.1.3 Tasques a realitzar per l’alumne ..................................................................................................................71 6.1.3.1 VSI amb tres interruptors connectats simultàniament ...........................................................................71 6.1.3.2 VSI-PWM.............................................................................................................................................71 6.1.3.3 Qüestions ..............................................................................................................................................71
6.2 INFORME DEL FUNCIONAMENT DELS INVERSORS AMB UN MOTOR D’INDUCCIÓ I UNA CÀRREGA MECÀNICA .........................................................................................................................................72
6.2.1 Introducció...................................................................................................................................................72 6.2.2 VSI amb tres interruptors tancats simultàniament .......................................................................................72 6.2.3 VSI-PWM....................................................................................................................................................75 6.2.4 Conclusions generals ...................................................................................................................................78
III
7 PRÀCTICA - 7..........................................................................................................................................................79 7.1 ARRANC I FRENAT D’UN MOTOR DE CORRENT CONTINUA ...............................................................79
7.1.1 OBJECTIU ..................................................................................................................................................79 7.1.2 ESQUEMA I VALORS INICIALS.............................................................................................................79
7.1.2.1 Posta en marxa del motor de corrent contínua ......................................................................................79 7.1.2.1 Aparells a utilitzar en la connexió derivació i sèrie ..............................................................................79 7.1.2.2 Esquema a utilitzar en la connexió derivació........................................................................................80 7.1.2.3 Esquema a utilitzar en la connexió sèrie...............................................................................................80 7.1.2.4 Frenat del motor de corrent contínua....................................................................................................81 7.1.2.5 Esquema a utilitzar en el frenat a rotor lliure........................................................................................81 7.1.2.6 Esquema a utilitzar en el frenat regeneratiu ..........................................................................................81 7.1.2.7 Esquema a utilitzar en el frenat a contracorrent....................................................................................82
7.1.3 Tasques a realitzar per l’alumne ..................................................................................................................82 7.1.3.1 Posta en marxa amb connexió derivació...............................................................................................82 7.1.3.2 Posta en marxa amb connexió sèrie ......................................................................................................84 7.1.3.3 Frenat a rotor lliure ...............................................................................................................................84 7.1.3.4 Frenat regeneratiu .................................................................................................................................84 7.1.3.5 Frenat a contracorrent ...........................................................................................................................85 7.1.3.6 Qüestions ..............................................................................................................................................85
7.2 INFORME DE ARRANC I FRENAT D’UN MOTOR DE CORRENT CONTINUA ......................................86 7.2.1 Introducció...................................................................................................................................................86 7.2.2 Arranc amb connexió derivació...................................................................................................................87 7.2.3 Posta en marxa amb connexió sèrie .............................................................................................................88 7.2.4 Frenat a rotor lliure......................................................................................................................................89 7.2.5 Frenat regeneratiu........................................................................................................................................89 7.2.6 Frenat a contracorrent..................................................................................................................................89 7.2.7 Qüestions.....................................................................................................................................................90
8 PRÀCTICA - 8..........................................................................................................................................................92 8.1 CONTROL DE LA VELOCITAT DE UN MOTOR DE CORRENT CONTINUA MITJANÇANT UN CONVERTIDOR CONTINUA - CONTINUA........................................................................................................92
8.1.1 OBJECTIU ..................................................................................................................................................92 8.1.2 ESQUEMA I VALORS INICIALS.............................................................................................................92
8.1.2.1 Aparells a utilitzar en el chopper amb una càrrega elèctrica .................................................................92 8.1.2.2 Esquema a utilitzar en el chopper amb una càrrega elèctrica ................................................................92 8.1.2.3 Aparells a utilitzar en el chopper amb un motor de corrent continua....................................................92 8.1.2.4 Esquema a utilitzar el chopper amb un motor de corrent continua .......................................................93
8.1.3 Tasques a realitzar per l’alumne ..................................................................................................................93 8.1.3.1 Chopper amb una carrega elèctrica .......................................................................................................93 8.1.3.2 Chopper amb un motor de corrent continua..........................................................................................94
8.2 INFORME DEL CONTROL DE LA VELOCITAT DE UN MOTOR DE CORRENT CONTINUA MITJANÇANT UN CONVERTIDOR CONTINUA - CONTINUA.......................................................................95
8.2.1 Introducció...................................................................................................................................................95 8.2.2 Chopper amb una carrega elèctrica..............................................................................................................95 8.2.3 Chopper amb un motor de corrent continua.................................................................................................97
9 BIBLIOGRAFIA.......................................................................................................................................................98
Pròleg - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 1de 98
A PRÒLEG
A.1 OBJECTE DEL PROJECTE
El objecte de aquest projecte es el de presentar unes pràctiques de control demàquines elèctriques per a introduir els alumnes en el comportament en règim dinàmicde les màquines elèctriques, sense entrar en conceptes matemàtics avançats com apossible eina de treball per a altres assignatures.
A.2 POSSIBLES SOLUCIONS I SOLUCIÓ ADOPTADA
A.2.1 Amb visió i realització de les maniobres directament sobre les màquines
Els mètodes de control amb visió directa de les màquines son les pràctiquesideals cuan es disposa de un laboratori i material apropiat per a realitzar-les, faciliten laseva futura realització pràctica, i donen una idea ideal de com es comporta la màquina.
En contra tenim que es imprescindible la presencia del alumne i el professor a ellaboratori per a la realització pràctica, a més a mes de presentar una forta inversió per ala universitat.
A.2.2 Mitjançant l’ordinador amb altres programes que no son el PSIM
Aquest mètode presenta les desavantatges de que no tenim un comportament realde les màquines, i com es veu en el punt 1.5 del manual de iniciació al PSIM per aelèctrics no hi ha cap programa capaç de analitzar les màquines tan facilment com elPSIM.
A.3 SOLUCIÓ ADOPTADA
La solució que s’adopta per a que el alumne faci les pràctiques es la sevarealització amb el PSIM, perquè tenim la avantatja de que tot i ser pràcticamentimprescindible la presencia del professor a classe, l’alumne pot fer la majoria de treballa casa. Es per això que fem la realització de les pràctiques amb el PSIM.
A.4 REALITZACIÓ DE LES PRÀCTIQUES
Les Pràctiques s’han realitzat mitjançant el software de prova de la casaPOWERSIM Technologies Inc, amb la pagina web: www.powersimtech.com
El programa en concret es diu PSIM i s’adjunta en el projecte un manual deinstruccions per a fer mes senzilla la introducció en aquest programa al alumne.
Les pràctiques s’han dividit en 8 apartats, en que cada una de elles representa untema totalment independent però al mateix temps tenen punts en comú per a realitzaruna coneixença de les màquines elèctriques
Cada apartat, o cada pràctica te dos sub-apartats principals, aquests son elenunciat i el informe.
1) Enunciat: es la part del projecte que veu el alumne i conte tots els elementspràctics necessaris per a la realització del projecte.

Pròleg - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 2de 98
2) Informe: es el que hauria de realitzar el alumne. Es deure del professor llegir-se aquest apartat avanç de realitzar-se al laboratori per tal de orientar al alumne en larealització de les pràctiques.
D’altra banda s’han establert els següents objectius per a les realitzacions de lespràctiques:
1) Pràctica 1
Aquesta és la primera pràctica, de manera que es el primer contacte amb el PSIM;l'objectiu de la pràctica es veure com afecta el parell a la posta en marxa d'un motord’inducció trifàsic en règim transitori mentre s’aprèn a fer funcionar el programa.
També s’ha d’aprendre a fer servir el SIMCAD per tal de obtenir les respostestemporals de la corrent, parells motors resistents i velocitat de un motor.
2) Pràctica 2
L’objectiu de la practica es el estudi dels diferents mètodes en la posta en marxad’un motor d’inducció, l’objectiu de qualsevol mètode de posta en marxa és el de reduirla intensitat quan l’engeguem
En aquesta pràctica s’inclou el mètode de posta en marxa kusa encara que nosigui un mètode pròpiament dels de tensió reduï da.
3) Pràctica 3
En aquesta pràctica l’objectiu es veure diferents mètodes d’aturada del motord’inducció.
4) Pràctica 4
L’objectiu d’aquesta pràctica es el de veure quines diferències hi ha entre elmètode tradicional i gràfic del diagrama del cercle l’obtenció del mateix mitjançant elPSIM. Aquesta pràctica no pretén demostrar que el PSIM és un mètode d’anàlisi millor,sinó que és un mètode d’assaig teòric en que és pretén simular el comportament d’unmotor abans de la seva fabricació o si més no el seu comportament amb diferentssituacions d’una manera simple i didàctica.
També servirà per a recordar com es realitza el diagrama del cercle.
5) Pràctica 5
L’objectiu de la pràctica és el d’entendre el funcionament dels inversors d’onaquadrada i PWM, realitzar els esquemes equivalents amb el PSIM i analitzar elsresultats de forma que es pugui analitzar com converteixen els inversors la correntcontínua en alterna.
6) Pràctica 6
Ja s’han vist el funcionament dels inversors d’ona a la pràctica anterior. Arapodrem saber com es comporten aquests inversors quan alimentem un motord’inducció, realitzar els esquemes pertinents amb el PSIM i analitzar els resultats per talde veure com afecta el seu comportament a la velocitat del motor.

Pròleg - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 3de 98
7) Pràctica 7
Vistos ja els motors de corrent alterna ara analitzarem els motors de correntcontínua i es veurà com afecta el parell a la posta marxa al motor de corrent contínua enrègim transitori; amb diferents connexions, derivació i sèrie, veurem com afecta la postaen marxa amb una resistència al induï t.
El frenat d’un motor amb connexió derivació fent servir les dos formes de frenatelèctric, el frenat regeneratiu i el frenat a contra corrent.
8) Pràctica 8
Analitzar el comportament de un convertidor continua-continua (en el nostre casreductor) amb diferents càrregues i un motor de corrent continua.
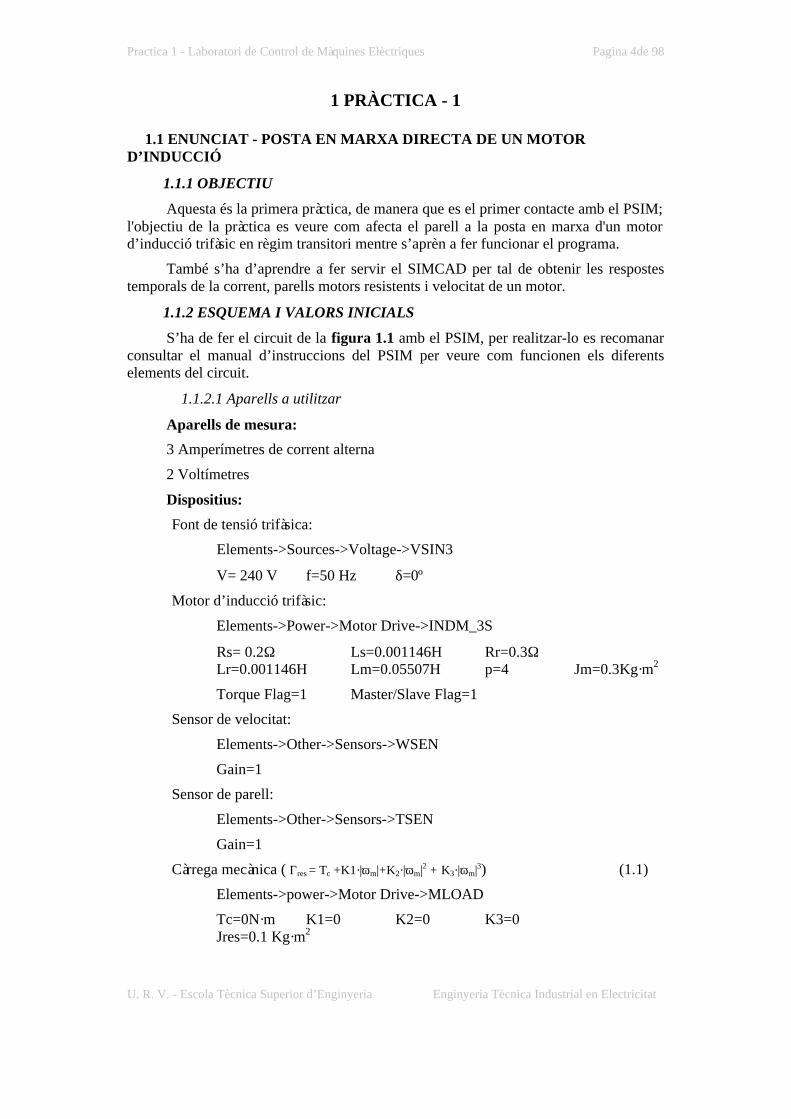
Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 4de 98
1 PRÀCTICA - 1
1.1 ENUNCIAT - POSTA EN MARXA DIRECTA DE UN MOTORD’INDUCCIÓ
1.1.1 OBJECTIU
Aquesta és la primera pràctica, de manera que es el primer contacte amb el PSIM;l'objectiu de la pràctica es veure com afecta el parell a la posta en marxa d'un motord’inducció trifàsic en règim transitori mentre s’aprèn a fer funcionar el programa.
També s’ha d’aprendre a fer servir el SIMCAD per tal de obtenir les respostestemporals de la corrent, parells motors resistents i velocitat de un motor.
1.1.2 ESQUEMA I VALORS INICIALS
S’ha de fer el circuit de la figura 1.1 amb el PSIM, per realitzar-lo es recomanarconsultar el manual d’instruccions del PSIM per veure com funcionen els diferentselements del circuit.
1.1.2.1 Aparells a utilitzar
Aparells de mesura:
3 Amperímetres de corrent alterna
2 Voltímetres
Dispositius:
Font de tensió trifàsica:
Elements->Sources->Voltage->VSIN3
V= 240 V f=50 Hz δ=0º
Motor d’inducció trifàsic:
Elements->Power->Motor Drive->INDM_3S
Rs= 0.2Ω Ls=0.001146H Rr=0.3ΩLr=0.001146H Lm=0.05507H p=4 Jm=0.3Kg·m2
Torque Flag=1 Master/Slave Flag=1
Sensor de velocitat:
Elements->Other->Sensors->WSEN
Gain=1
Sensor de parell:
Elements->Other->Sensors->TSEN
Gain=1
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Elements->power->Motor Drive->MLOAD
Tc=0N·m K1=0 K2=0 K3=0Jres=0.1 Kg·m2

Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 5de 98
Fig 1.1: Esquema de la posta en marxa directe d’un motor d’inducció alimentat ambuna font de tensió senoidal i accionant una càrrega mecànica genèrica, havent-hitambé sensors de intensitat, parell i velocitat.
Paràmetres de simulació
TS=0.0005s TT=1.5s PT=0s PS=1
1.1.2.2 Esquema
1.1.3 Tasques a realitzar per l’alumne
1.1.3.1 Posta en marxa en buit
S’ha de trobar diferents variables:
- Imax (intensitat màxima de pic, pot ser positiva o negativa, i pot estar enqualsevol de les tres fases)
- Irp (intensitat a règim permanent, es pot agafar la de la fase a)
- nrp(velocitat a règim permanent)
- Γmotor (parell que dóna el motor en règim permanent)
- Γresistent (parell resistent en règim permanent)
- Γmotor max(parell de pic que dóna el motor en la posta en marxa)
- Γresistent max(parell resistent màxim que ofereix la carrega mecànica en la posta enmarxa)
- T (temps que tarda assolir la nn ,de forma orientativa)
1.1.3.2 Posta en marxa a parell resistent constant
Ara s’ha de calcular quin seria el parell nominal, sabent que el lliscament és d’un5%
Per a realitzar aquesta operació es pot utilitzar la fórmula del parell:
22
2
··
'·3
XccSn
RrRs
Usf
Sn
Rr
s +
+
=Γω
(1.2)
Hem de tenir en compte que el motor esta connectat en estrella, és per això que:
3
UslUsf = (1.3)

Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 6de 98
Comprova que realment el lliscament sigui un 5%.
També s’han de trobar les variables: Imax, Irp, nrp, Γmotor , Γresistent , Γmotor max, Γresistent
max, nrp , T com en el apartat anterior. Raona els resultats.
1.1.3.3 Posta en marxa amb un parell ventilador
Realitzant els mateixos passos que en el apartat anterior però aquesta vegada elparell serà parabòlic; és a dir, que en comptes de ficar com abans el valor a la Tc de lacàrrega mecànica, s’ha de ficar a la K2 per tal de que el parell sigui d’una maneraquadràtica.
També s’ha de trobar les variables: Imax, Irp, nrp, Γmotor , Γresistent , Γmotor max, Γresistent
max, nrp , T
1.1.3.4 Qüestions
Per resoldre les preguntes posteriors heu de realitzar les gràfiques d’intensitatvelocitat i parell motor de les tres postes en marxa conjuntament (opció merge, si teniualgun dubte podeu consultar el manual del PSIM), també us podeu basar en els resultatsanteriors de les pràctiques.
a) Per quines variables creus que es veuen afectades les petites oscil·lacions de lavelocitat tot just quan engeguem el motor?
b) Perquè consumeix corrent un motor en buit? Quina velocitat marca elSIMVIEW en la posta en marxa en buit? Es possible realment?
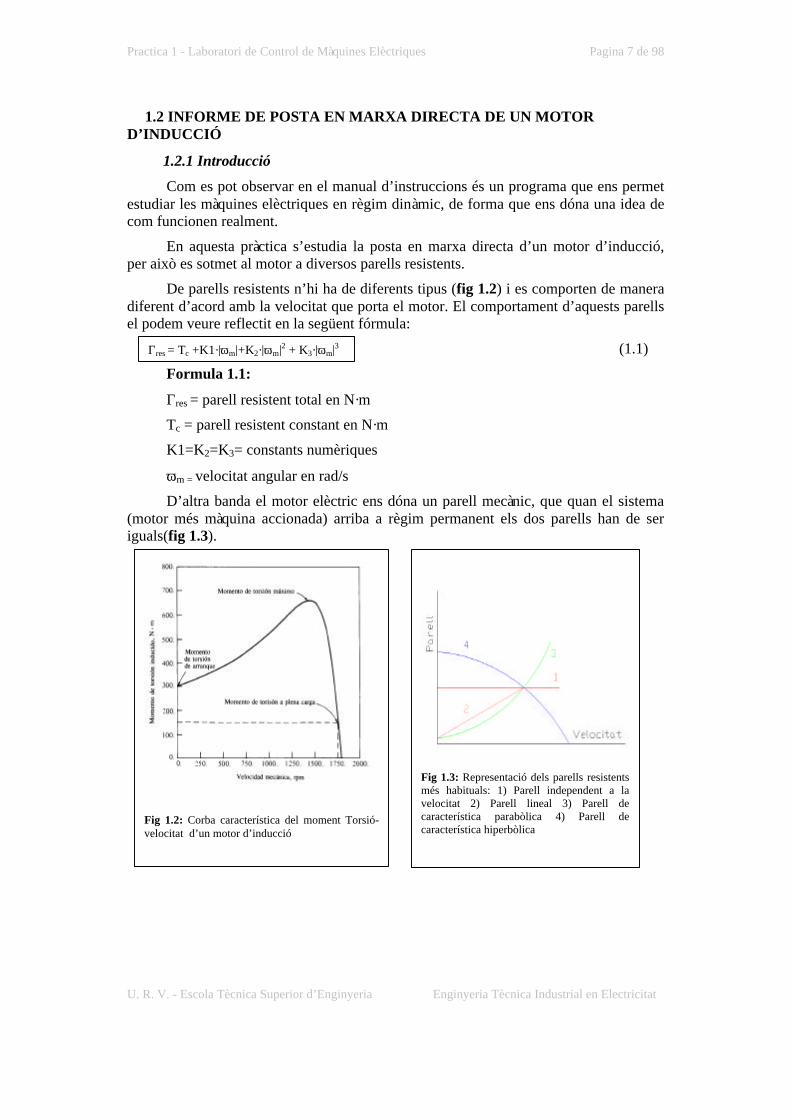
Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 7 de 98
Fig 1.3: Representació dels parells resistentsmés habituals: 1) Parell independent a lavelocitat 2) Parell lineal 3) Parell decaracterística parabòlica 4) Parell decaracterística hiperbòlica
1.2 INFORME DE POSTA EN MARXA DIRECTA DE UN MOTORD’INDUCCIÓ
1.2.1 Introducció
Com es pot observar en el manual d’instruccions és un programa que ens permetestudiar les màquines elèctriques en règim dinàmic, de forma que ens dóna una idea decom funcionen realment.
En aquesta pràctica s’estudia la posta en marxa directa d’un motor d’inducció,per això es sotmet al motor a diversos parells resistents.
De parells resistents n’hi ha de diferents tipus (fig 1.2) i es comporten de maneradiferent d’acord amb la velocitat que porta el motor. El comportament d’aquests parellsel podem veure reflectit en la següent fórmula:
(1.1)
Formula 1.1:
Γres = parell resistent total en N·m
Tc = parell resistent constant en N·m
K1=K2=K3= constants numèriques
ωm = velocitat angular en rad/s
D’altra banda el motor elèctric ens dóna un parell mecànic, que quan el sistema(motor més màquina accionada) arriba a règim permanent els dos parells han de seriguals(fig 1.3).
Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3
Fig 1.2: Corba característica del moment Torsió-velocitat d’un motor d’inducció

Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 8 de 98
1.2.2 Posta en marxa en buit
Desprès de fer la simulació de la posta en marxa en buit ens disposem a calculartot
Paràmetre Abreviació Resultat Unitatintensitat màxima de pic, fase
AImax 261.16 A
intensitat a regim permanent Irp
2
11.07=7.82
A
velocitat a regim permanent nrp 1503 Min-1
parell que dona el motor enregim permanent
Γmotor 0 N.m
parell resistent en regimpermanent
Γresistent 0 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 376.31 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 0 N.m
temps que tarda a assolir la nn T 0.4 s
1.2.3 Posta en marxa a parell resistent constant
Per donar-nos una noció de quina seria la velocitat que ha d’assolir el motorprimer calculem la velocitat de sincronisme, mitjançant la següent formula.
p
60·f n sinc = (1.4)
Formula 1.4:
nsinc = velocitat de sincronisme, (a la que gira el camp magnètic del estator)(min-1)
f= freqüència del corrent elèctric(Hz)
p= numero de pols
En el nostre cas és 1sinc min1500
4
60·50 n −== com que sabem que el lliscament es un 5%
només cal aplicar la formula del lliscament:
100·1sin
sin
−
−=
c
nc
n
nnS (1.5)
Formula 1.5:
S = lliscament.
nsinc = velocitat de sincronisme (min-1)
nn= velocitat nominal (min-1)
Resulta que la velocitat del motor quan te un lliscament del 5% es de 1425 min-1

Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 9 de 98
D’altra banda aquí tenim la formula del parell, que se’ns ha donat en el manual depràctiques.
2
2
2
'·
·
'·3
XccSn
RrRs
Usf
Sn
Rr
s +
+
=Γω
(1.2)
Formula 1.2:
Γ=parell (N·m)
Rr’= resistència del rotor(Ω)
ωs= velocitat de sincronisme(rad/s)
Sn= lliscament
Rs= resistència del estator(Ω)
Usf= tensió de fase(V)
Xcc= inductància de curt circuit(Ω)
Aquesta formula surt del circuit elèctric equivalent del motor d’inducció i de lesformules, 1.6, 1.7, 1.8:
Fig 1.4: Circuit reduït que representa el equivalent elèctric de un motor de inducció.
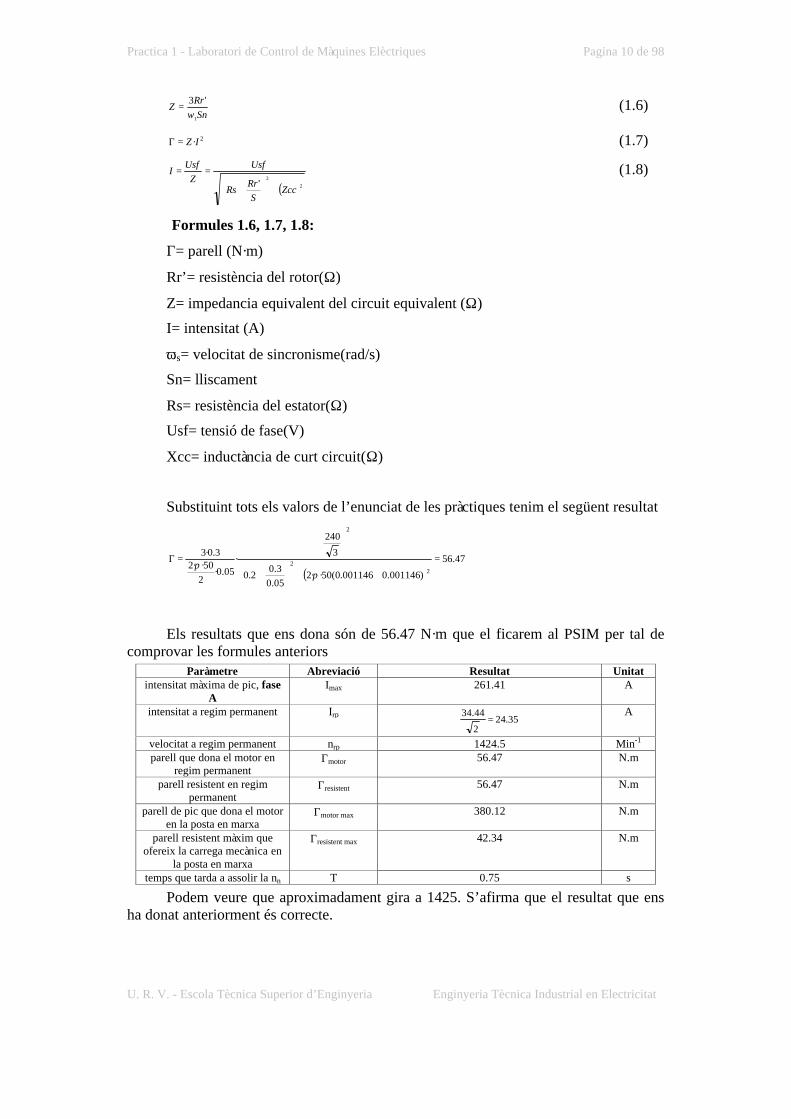
Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 10 de 98
Sn
RrZ
1
'3
ω= (1.6)
2·IZ=Γ (1.7)
( )2
2'
ZccS
RrRs
Usf
Z
UsfI
+
+
== (1.8)
Formules 1.6, 1.7, 1.8:
Γ= parell (N·m)
Rr’= resistència del rotor(Ω)
Z= impedancia equivalent del circuit equivalent (Ω)
I= intensitat (A)
ωs= velocitat de sincronisme(rad/s)
Sn= lliscament
Rs= resistència del estator(Ω)
Usf= tensió de fase(V)
Xcc= inductància de curt circuit(Ω)
Substituint tots els valors de l’enunciat de les pràctiques tenim el següent resultat
( )47.56
)001146.0001146.0(50··205.0
3.02.0
3
240
·05.0·
2
50··23.0·3
22
2
=
++
+
=Γ
ππ
Els resultats que ens dona són de 56.47 N·m que el ficarem al PSIM per tal decomprovar les formules anteriors
Paràmetre Abreviació Resultat Unitatintensitat màxima de pic, fase
AImax 261.41 A
intensitat a regim permanent Irp 35.242
34.44=
A
velocitat a regim permanent nrp 1424.5 Min-1
parell que dona el motor enregim permanent
Γmotor 56.47 N.m
parell resistent en regimpermanent
Γresistent 56.47 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 380.12 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 42.34 N.m
temps que tarda a assolir la nn T 0.75 s
Podem veure que aproximadament gira a 1425. S’afirma que el resultat que ensha donat anteriorment és correcte.

Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 11 de 98
1.2.4 Posta en marxa amb un parell ventilador
Ens hem de basar com diu en el enunciat en la fórmula 1.2 la constant k2 de laque podem extreure la següent formula:
2·2 kω=Γ (1.9)
Formula 1.9:
Γ= parell (N·m)
ω= velocitat angular (rad/s)
k2= constant
Així doncs tenint el parell i la velocitat del apartat anterior podem calcular elvalor que li hem de posar a k2:
002537.0
60·2·5.1424
47.562 2 =
=π
K
Els resultats que ens dóna és de 0.002537 ,que l’introduirem al PSIM per tal deanalitzar els resultats anteriors
Paràmetre Abreviació Resultat Unitatintensitat màxima de pic, fase
AImax 261.27 A
intensitat a regim permanent Irp 16.262
37=
A
velocitat a regim permanent nrp 1418 Min-1
parell que dona el motor enregim permanent
Γmotor 60 N.m
parell resistent en regimpermanent
Γresistent 60 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 378.5 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 98.4 N.m
temps que tarda a assolir la nn T 0.67 s

Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 12 de 98
1.2.5 Qüestions
A continuació es mostraran les gràfiques comparatives d’intensitat velocitat iparell de les tres postes en marxa conjuntament.
Fig. 1.5: Gràfica de les tres intensitats (roig intesitat en buit, verd intensitat enventilador, blau intensitat a parell cte.) que els hi sortirà als alumnes, amb elesquema indicat per aquesta pràctica a la figura 1.3 amb una escala de 1.5 segons
Fig. 1.6: Gràfica de les tres velocitats (roig velocitat en vuit, verd velocitat enventilador, blau velocitat a parell cte.) que els hi sortirà als alumnes, amb elesquema indicat per aquesta pràctica a la figura 1.3 amb una escala de 1.5 segons
Fig. 1.7: Gràfica dels tres parells motors (roig parell en vuit, verd parell enventilador, blau parell a parell cte.) que els hi sortirà als alumnes, amb el esquemaindicat per aquesta pràctica a la figura 1.3 amb una escala de 1.5 segons

Practica 1 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 13 de 98
a) Per quines variables creus que es veuen afectades les petites oscil·lacions de lavelocitat tot just quan engeguem el motor?
A la diferència entre parell motor i parell resistent. Quan el parell motor és fa méspetit que el parell resistent (petits intervals de temps) el sistema deixa d'accelerar.
b) Perquè consumeix corrent un motor en buit? Quina velocitat marca elSIMVIEW en la posta en marxa en buit? És possible realment?
Un motor en buit consumeix corrent degut a les pèrdues que ens produeix aquestmateix, degudes a fregaments que sempre s’oposen a qualsevol moviment.
Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 14 de 98
2 PRÀCTICA - 2
2.1 POSTA EN MARXA D’UN MOTOR D’INDUCCIÓ AMB LA TENSIÓREDUÏDA A L'ESTATOR
2.1.1 OBJECTIU
L’objectiu de la practica es el estudi dels diferents mètodes en la posta en marxad’un motor d’inducció, l’objectiu de qualsevol mètode de posta en marxa és el de reduirla intensitat quan l’engeguem
En aquesta pràctica s’inclou el mètode de posta en marxa kusa encara que nosigui un mètode pròpiament dels de tensió reduï da.
2.1.2 ESQUEMA I VALORS INICIALS
En aquesta pràctica analitzem tres circuits diferents, encara que tots ells tenen undenominador comú, i es que la posta en marxa es fa amb maniobres al estator.
Els mètodes de posta en marxa són els següents:
a) Reduint la tensió:
Resistències estatòriques (figura 2.1)
Estrella - triangle (figura 2.2)
c) Posta en marxa Kusa (figura 2.3)
S’han de realitzar els circuits corresponents a cada esquema amb el PSIM, per arealitzar-los podeu ajudar-vos del manual d’instruccions del PSIM per a trobar elsdiferents elements del circuit.
2.1.2.1 Aparells a utilitzar en el arranc amb resistències estatòriques
Aparells de mésura:
3 Amperímetres de corrent alterna
3 Voltímetres
Dispositius:
Font de tensió trifàsica:
Elements->Sources->Voltage->VSIN3
V= 240 V f=50 Hz δ=0º
Contactor (G1)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 0 0.6 s

Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 15 de 98
Contactor (G2)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 0.6 2 s
Resistència trifàsica
Elements->Power->RLC_Branches->r3
Resistance=0.5 Ω
Motor d’inducció trifàsic:
Elements->Power->Motor Drive->INDM_3S
Rs= 0.2Ω Ls=0.001146H Rr=0.3ΩLr=0.001146H Lm=0.05507H p=4 Jm=0.3Kg·m2
Torque Flag=1 Master/Slave Flag=1
Sensor de velocitat:
Elements->Other->Sensors->WSEN
Gain=1
Sensor de parell:
Elements->Other->Sensors->TSEN
Gain=1
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Elements->power->Motor Drive->MLOAD
Tc=0 N·m K1=0.2 K2=0 K3=0Jres=0.1 Kg·m2
Paràmetres de simulació
TS=0.0005s TT=2 PT=0s PS=1
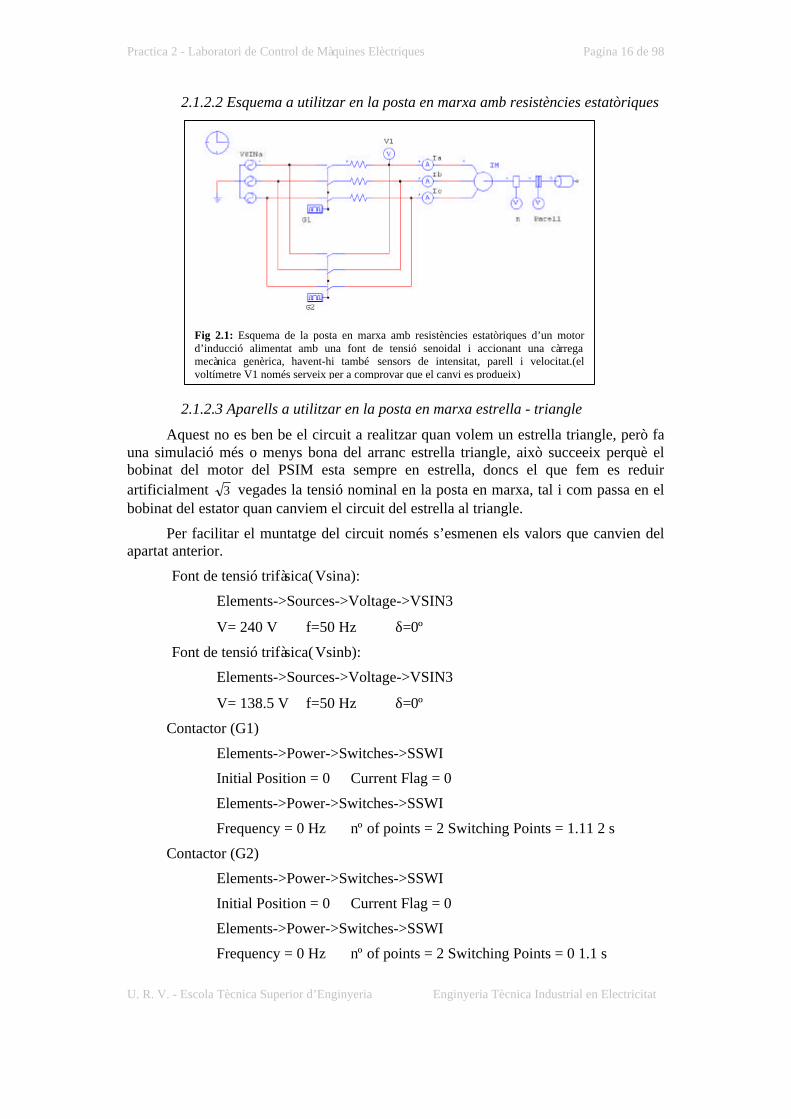
Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 16 de 98
Fig 2.1: Esquema de la posta en marxa amb resistències estatòriques d’un motord’inducció alimentat amb una font de tensió senoidal i accionant una càrregamecànica genèrica, havent-hi també sensors de intensitat, parell i velocitat.(elvoltímetre V1 només serveix per a comprovar que el canvi es produeix)
2.1.2.2 Esquema a utilitzar en la posta en marxa amb resistències estatòriques
2.1.2.3 Aparells a utilitzar en la posta en marxa estrella - triangle
Aquest no es ben be el circuit a realitzar quan volem un estrella triangle, però fauna simulació més o menys bona del arranc estrella triangle, això succeeix perquè elbobinat del motor del PSIM esta sempre en estrella, doncs el que fem es reduirartificialment 3 vegades la tensió nominal en la posta en marxa, tal i com passa en elbobinat del estator quan canviem el circuit del estrella al triangle.
Per facilitar el muntatge del circuit només s’esmenen els valors que canvien delapartat anterior.
Font de tensió trifàsica( Vsina):
Elements->Sources->Voltage->VSIN3
V= 240 V f=50 Hz δ=0º
Font de tensió trifàsica( Vsinb):
Elements->Sources->Voltage->VSIN3
V= 138.5 V f=50 Hz δ=0º
Contactor (G1)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->SSWI
Frequency = 0 Hz nº of points = 2 Switching Points = 1.11 2 s
Contactor (G2)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->SSWI
Frequency = 0 Hz nº of points = 2 Switching Points = 0 1.1 s

Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 17 de 98
Fig 2.2: Esquema de la posta en marxa estrella triangle d’un motor d’induccióalimentat amb una font de tensió senoidal i accionant una càrrega mecànica genèrica,havent-hi també sensors de intensitat, parell i velocitat. (el voltímetre V1 nomésserveix per a comprovar que el canvi es produeix)
2.1.2.4 Esquema a utilitzar en la posta en marxar estrella triangle
2.1.2.5 Aparells a utilitzar en la posta en marxa kusa
Aquest mètode de posta en marxa només s’esmena a mode de curiositat, ja queno es molt utilitzat
Aparells de mesura:
3 Amperímetres de corrent alterna
3 Voltímetres
Dispositius:
Font de tensió trifàsica:
Elements->Sources->Voltage->VSIN3
V= 240 V f=50 Hz δ=0º
Contactor (G1)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 1 2 s
Contactor (G2)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 0 1 s

Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 18 de 98
Fig 2.3: Esquema en la posta en marxa kusa d’un motor d’inducció alimentat ambuna font de tensió senoidal i accionant una càrrega mecànica genèrica, havent-hitambé sensors de intensitat, parell i velocitat. (el voltímetre V1 només serveix per acomprovar que el canvi es produeix)
Resistència
Elements->Power->RLC_Branches->r
Resistance=2 Ω
Motor d’inducció trifàsic:
Elements->Power->Motor Drive->INDM_3S
Rs= 0.2Ω Ls=0.001146H Rr=0.3ΩLr=0.001146H Lm=0.05507H p=4 Jm=0.3Kg·m2
Torque Flag=1 Master/Slave Flag=1
Sensor de velocitat:
Elements->Other->Sensors->WSEN
Gain=1
Sensor de parell:
Elements->Other->Sensors->TSEN
Gain=1
Càrrega mecànica (Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Elements->power->Motor Drive->MLOAD
Tc=0 N·m K1=0.2 K2=0 K3=0Jres=0.1 Kg·m2
Paràmetres de simulació
TS=0.0005s TT=2 PT=0s PS=1
2.1.2.6 Esquema a utilitzar en la posta en marxa kusa
Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 19 de 98
2.1.3 Tasques a realitzar per l’alumne
2.1.3.1 Posta en marxa a tensió reduïda al estator
Es recomana guardar tots els circuits que feu perquè en el apartat de qüestions seus demanaran preguntes relacionades amb els diferents tipus de la posta en marxaa lavegada.
Per a complementar el arranc amb resistències estatòriques heu de muntar elcircuit amb aquests valors canviants.
Contactor (G1): Switching Points = 0 1.2 s
Contactor (G2): Switching Points = 1.2 2 s
Resistència: 1 Ω
S’han de trobar diferents variables per als circuits de resistències estatòriques i enla posta en marxa estrella triangle
- Imax (intensitat màxima de pic en el instant en que el motor deixa el seu estat derepòs, pot ser positiva o negativa, i pot estar en qualsevol de les tres fases)
- Irp (intensitat a regim permanent, es pot agafar la de la fase a)
- nrp(velocitat a regim permanent)
- Γmotor (parell que dona el motor en regim permanent)
- Γresistent (parell resistent en regim permanent)
- Γmotor max (parell de pic que dona el motor al arranc, instant en que el motor deixael seu estat de repòs)
- Γresistent max (parell resistent màxim que ofereix la carrega mecànica al arranc)
- T (temps que tarda a assolir la nn més o menys a ull)
- S (lliscament quan el motor arriba a una velocitat de regim permanent en %)
100·sin__
___1
−=
cronismedevelocitat
permanentregimavelocitatS (2.1)
2.1.3.2 Posta en marxa kusa
S’han de trobar les variables: Imax, Irp, nrp, Γmotor , Γresistent , Γmotor max, Γresistent max,nrp, T, S
2.1.3.3 Qüestions
Per a resoldre les preguntes posteriors heu de realitzar les gràfiques de intensitatvelocitat i parell motor en la posta en marxa conjuntament (opció merge, si teniu algundubte podeu consultar el manual del PSIM), també us podeu basar en els resultatsanteriors de les pràctiques.
a) En el mètode estrella - triangle quina és la reducció de la intensitat? I el parell?Es corresponen aquestos valors amb el que s’ha explicat a la teoria?
b) Explica els avantatges i desavantatges de la posta en marxa estrella-triangle i elde resistències estatòriques.
c) Quin mètode trobeu millor per a reduir el parell, el mètode de les resistènciesrotòriques o el mètode kusa, raona la teva resposta.

Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 20de 98
2.2 INFORME DE POSTA EN MARXA DIRECTA DE UN MOTORD’INDUCCIÓ
2.2.1 Introducció
Com s’ha pogut veure en la pràctica anterior els motors d'inducció trifàsics tenenuna gran intensitat de posta en marxa, això és un problema per a les línies elèctriques, jaque provoquen un gran consum d’electricitat en molt poc temps. Si no controlem aquestfenomen podríem des de sobrecarregar la línia elèctrica fins a provocar una paradaperquè els dispositius de seguretat saltarien, o més greu encara fer parar al les centralsproductores d’electricitat. Per tal que això no succeeixi mai, existeixen unes normes queens limiten la intensitat màxima i les podem trobar al reglament de baixa tensió.
La normativa ens limita la intensitat de la posta en marxa segons la següentformula:
Imax=In·K (2.4)
Formula 2.4:
Imax= intensitat màxima permesa pelreglament, en A
In= intensitat nominal, en A
K= constant que indica la màximaproporcionalitat entre la intensitat decorrent de posta en marxa i la intensitat deplena càrrega(Taula 2.1), sense unitat.
D’altra banda tenim que la formula per al parell (per l'esquema de règimpermanent) és:
2
2
2
'·
·
'·3
XccSn
RrRs
Usf
Sn
Rr
s +
+
=Γω
(1.2)
Formula 1.2:
Γ=parell (N·m)
Rr’= resistència del rotor(Ω)
ωs= velocitat de sincronisme(rad/s)
Sn= lliscament
Rs= resistència del estator(Ω)
Usf= tensió de fase(V)
Xcc= inductància de curt circuit(Ω)
Taula de les potències de posta en marxa màximesextreta del RBT (MIE BT 034) (Taula 2.1)
Motors de corrent AlternaPotencia Nominal del
MotorConstant de màximaproporcionalitat entre laintensitat de la corrent deposta en marxa i de la deplena càrrega (K)
De 0.75 a 1.5 kW 4.5De 1.5 a 5.0 kW 3.0
De 5.0 a 15.0 kW 2.0De més de 15.0 kW 1.5
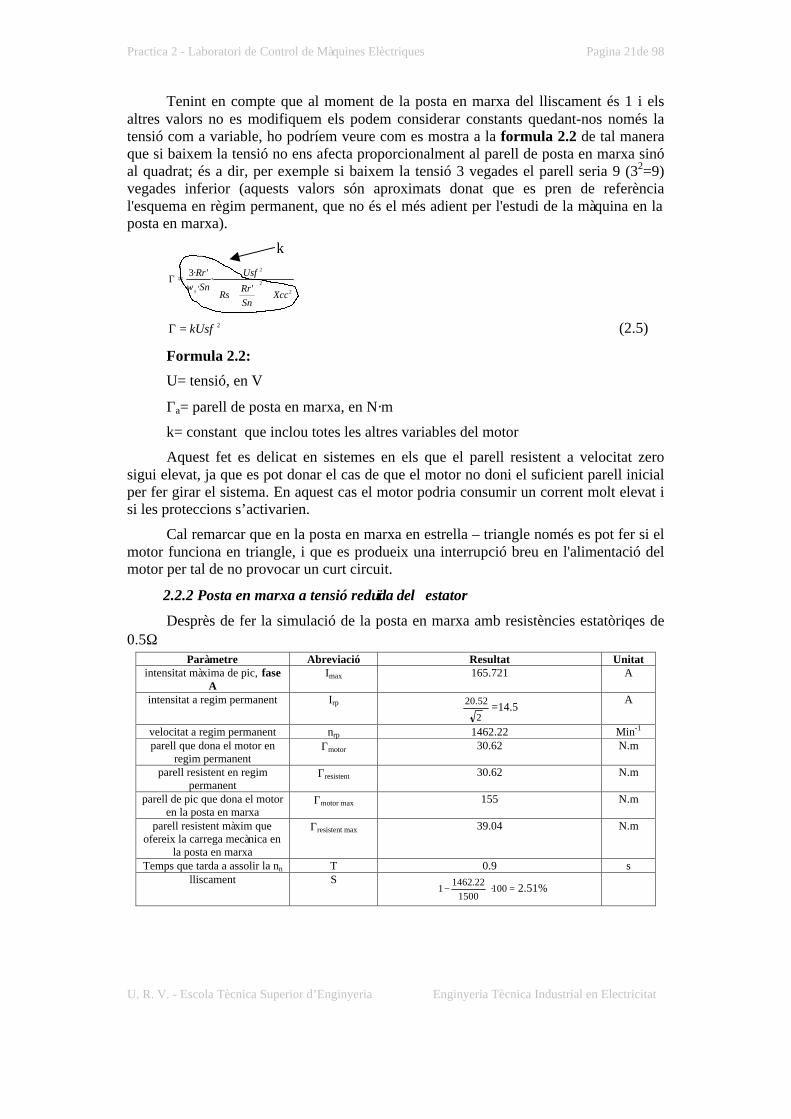
Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 21de 98
Tenint en compte que al moment de la posta en marxa del lliscament és 1 i elsaltres valors no es modifiquem els podem considerar constants quedant-nos només latensió com a variable, ho podríem veure com es mostra a la formula 2.2 de tal maneraque si baixem la tensió no ens afecta proporcionalment al parell de posta en marxa sinóal quadrat; és a dir, per exemple si baixem la tensió 3 vegades el parell seria 9 (32=9)vegades inferior (aquests valors són aproximats donat que es pren de referèncial'esquema en règim permanent, que no és el més adient per l'estudi de la màquina en laposta en marxa).
k
2
2
2
'·
·
'·3
XccSn
RrRs
Usf
Sn
Rr
s +
+
=Γω
2kUsf=Γ (2.5)
Formula 2.2:
U= tensió, en V
Γa= parell de posta en marxa, en N·m
k= constant que inclou totes les altres variables del motor
Aquest fet es delicat en sistemes en els que el parell resistent a velocitat zerosigui elevat, ja que es pot donar el cas de que el motor no doni el suficient parell inicialper fer girar el sistema. En aquest cas el motor podria consumir un corrent molt elevat isi les proteccions s’activarien.
Cal remarcar que en la posta en marxa en estrella – triangle només es pot fer si elmotor funciona en triangle, i que es produeix una interrupció breu en l'alimentació delmotor per tal de no provocar un curt circuit.
2.2.2 Posta en marxa a tensió reduïda del estator
Desprès de fer la simulació de la posta en marxa amb resistències estatòriqes de0.5Ω
Paràmetre Abreviació Resultat Unitatintensitat màxima de pic, fase
AImax 165.721 A
intensitat a regim permanent Irp
2
20.52 =14.5A
velocitat a regim permanent nrp 1462.22 Min-1
parell que dona el motor enregim permanent
Γmotor 30.62 N.m
parell resistent en regimpermanent
Γresistent 30.62 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 155 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 39.04 N.m
Temps que tarda a assolir la nn T 0.9 slliscament S
=
− 100·
150022.1462
1 2.51%

Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 22de 98
simulació de la posta en marxa amb resistències estatòriqes de 1ΩParàmetre Abreviació Resultat Unitat
intensitat màxima de pic, faseA
Imax 119.685 A
intensitat a regim permanent Irp
2
20.52=14.5
A
velocitat a regim permanent nrp 1462.22 Min-1
parell que dona el motor enregim permanent
Γmotor 30.62 N.m
parell resistent en regimpermanent
Γresistent 30.62 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 79.79 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 20.09 N.m
Temps que tarda a assolir la nn T 1.55 sLliscament S
=
− 100·1500
22.14621 2.51%
simulació de la posta en marxa estrella triangle.Paràmetre Abreviació Resultat Unitat
intensitat màxima de pic, faseA
Imax 150.85 A
intensitat a regim permanent Irp
2
11.07=7.82
A
velocitat a regim permanent nrp 1462.22 Min-1
parell que dona el motor enregim permanent
Γmotor 30.62 N.m
parell resistent en regimpermanent
Γresistent 30.62 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 127.37 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 32.09 N.m
Temps que tarda a assolir la nn T 1.40 sLliscament S
=
− 100·1500
22.14621 2.51%
2.2.3 Posta en marxa kusaParàmetre Abreviació Resultat Unitat
intensitat màxima de pic, faseA
Imax 248.43 A
intensitat a regim permanent Irp
2
11.07=7.82
A
velocitat a regim permanent nrp 1462.22 Min-1
parell que dona el motor enregim permanent
Γmotor 30.62 N.m
parell resistent en regimpermanent
Γresistent 30.62 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 220.60 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 57.54 N.m
temps que tarda a assolir la nn T 1.11 sLliscament S
=
− 100·1500
22.14621 2.51%

Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 23de 98
2.2.4 Qüestions
A continuació es mostraran les gràfiques comparatives de intensitat velocitat iparell de els tres arrancs conjuntament.
Fig. 2.4: Gràfica de les totes les intensitats (roig posta en marxa kusa, blau posta enmarxa estrella triangle, posta en marxa amb resistències rotoriques, verd 0,5Ω lila1Ω.) que els hi sortirà als alumnes.
Fig. 2.5: Gràfica de les tres velocitats (roig posta en marxa kusa, blau posta enmarxa estrella triangle, posta en marxa amb resistències rotoriques, verd 0,5Ω lila1Ω) que els hi sortirà als alumnes.
Fig. 2.6: Gràfica de les tres parells motor (roig posta en marxa kusa, blau posta enmarxa estrella triangle, posta en marxa amb resistències rotoriques, verd 0,5Ω lila1Ω) que els hi sortirà als alumnes.
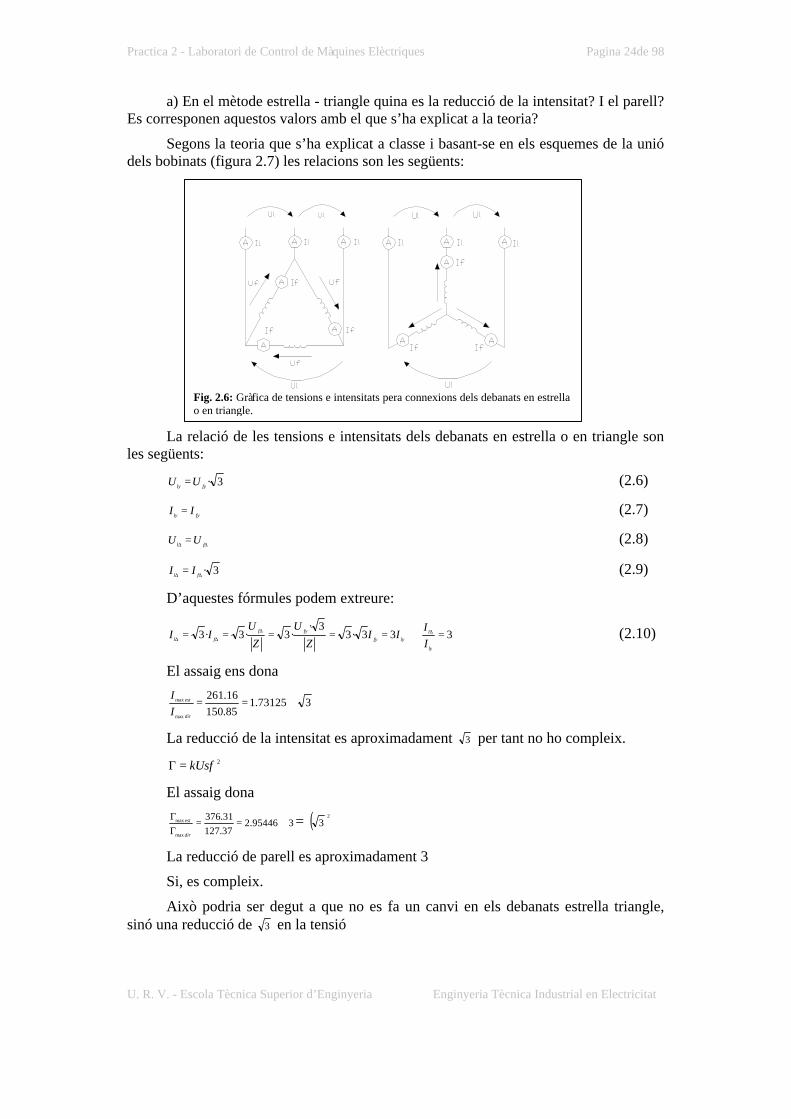
Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 24de 98
a) En el mètode estrella - triangle quina es la reducció de la intensitat? I el parell?Es corresponen aquestos valors amb el que s’ha explicat a la teoria?
Segons la teoria que s’ha explicat a classe i basant-se en els esquemes de la uniódels bobinats (figura 2.7) les relacions son les següents:
La relació de les tensions e intensitats dels debanats en estrella o en triangle sonles següents:
3·fyly UU = (2.6)
fyly II = (2.7)
∆∆ = fl UU (2.8)
3·∆∆ = fl II (2.9)
D’aquestes fórmules podem extreure:
333·33·
·3·3·3 =⇒===== ∆∆
∆∆
ly
l
lyfy
fyf
fl I
III
Z
U
Z
UII (2.10)
El assaig ens dona
373125.185.150
16.261
max
max ≅==dir
est
I
I
La reducció de la intensitat es aproximadament 3 per tant no ho compleix.2kUsf=Γ
El assaig dona
395446.237.127
31.376
max
max ≅==ΓΓ
dir
est = ( )23
La reducció de parell es aproximadament 3
Si, es compleix.
Això podria ser degut a que no es fa un canvi en els debanats estrella triangle,sinó una reducció de 3 en la tensió
Fig. 2.6: Gràfica de tensions e intensitats pera connexions dels debanats en estrellao en triangle.

Practica 2 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 25de 98
b) Explica els avantatges i desavantatges de la posta en marxa en estrella-trianglei el de resistències estatòriques de l’un respecte de l’altre.
Posta en marxa estrella triangle Posta en marxa amb resistències estatòriquesAvantatges Inconvenients Avantatges Inconvenients
No necessitem tantselements
Només pot funcionar quanel motor treballa amb
triangle
Pot funcionar ambqualsevol motor
Necessitem més elements
No tenim cap pèrdua perles resistències
Estem limitats a unareducció d’intensitat de
3 i parell del 3
Podem jugar amb lareducció
Tenim unes pèrdues depotencia per les resistències
c) Quin mètode trobeu millor per a reduir el parell, el mètode de les resistènciesrotòriques o el mètode kusa. Raona la teva resposta.
El de les resistències estatòriques pareix ser més convenient, ja que tenim tantuna reducció de parell com de intensitat notables i a més a més no desequilibrem lesfases.

Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 26 de 98
3 PRÀCTICA - 3
3.1 MÈTODES DE FRENAT D’UN MOTOR D’INDUCCIÓ
3.1.1 OBJECTIU
En aquesta pràctica l’objectiu es veure diferents mètodes d’aturada del motord’inducció.
3.1.2 ESQUEMA I VALORS INICIALS
Un dels grans problemes que tenen els motors es que tarden una estona en aturar-se i això a vegades no es convenient. Hi ha pocs mètodes per aturar el motor
Mètodes de aturada d’un motor d’inducció:
a) Frenat a rotor lliure (figura 3.1)
b) Frenat a contra corrent (figura 3.2)
c) Frenat amb corrent contínua (figura 3.3)
S’han de realitza els circuits corresponents a cada esquema amb el PSIM, per arealitzar-los podeu ajudar-vos del manual d’instruccions del PSIM per a trobar elsdiferents elements del circuit.
3.1.2.1 Aparells a utilitzar en el frenat a rotor lliure
Aparells de mesura:
3 Amperímetres de corrent alterna
3 Voltímetres
Dispositius:
Font de tensió trifàsica:
Elements->Sources->Voltage->VSIN3
V= 240 V f=50 Hz δ=0º
Contactor (G1)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 0 1.1 s
Motor d’inducció trifàsic:
Elements->Power->Motor Drive->INDM_3S
Rs= 0.2Ω Ls=0.001146H Rr=0.3ΩLr=0.001146H Lm=0.05507H p=4 Jm=0.3Kg·m2
Torque Flag=1 Master/Slave Flag=1
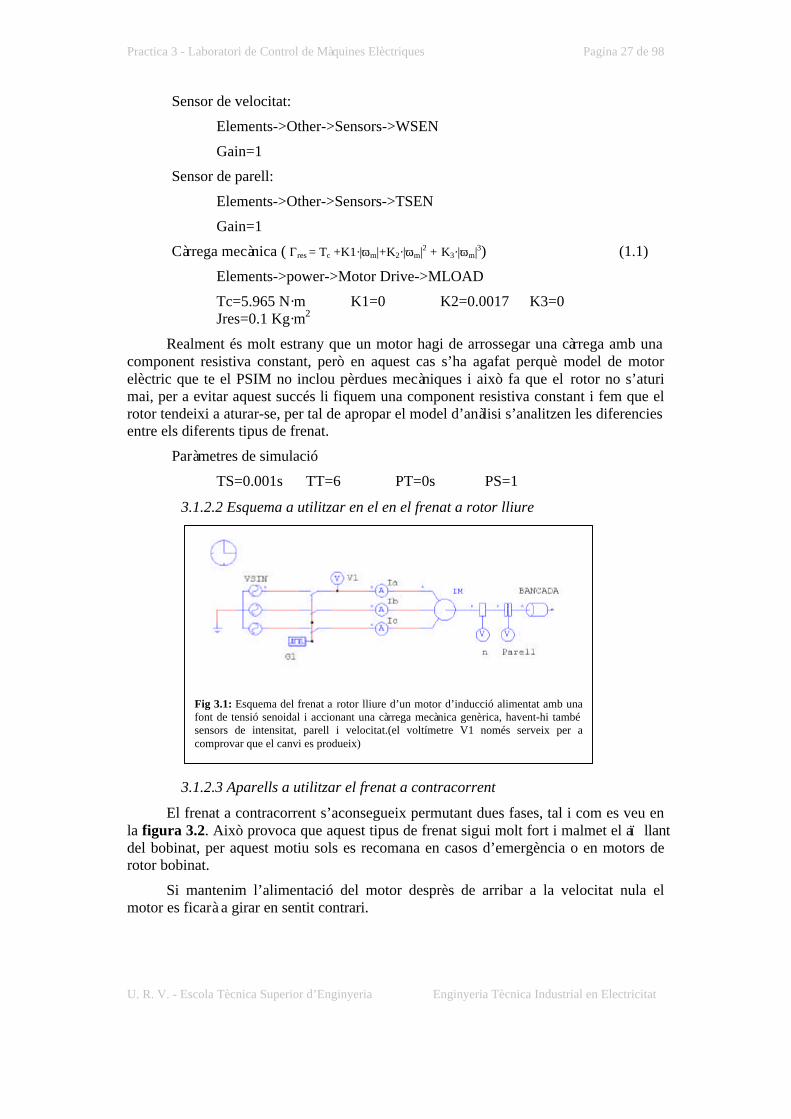
Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 27 de 98
Fig 3.1: Esquema del frenat a rotor lliure d’un motor d’inducció alimentat amb unafont de tensió senoidal i accionant una càrrega mecànica genèrica, havent-hi tambésensors de intensitat, parell i velocitat.(el voltímetre V1 només serveix per acomprovar que el canvi es produeix)
Sensor de velocitat:
Elements->Other->Sensors->WSEN
Gain=1
Sensor de parell:
Elements->Other->Sensors->TSEN
Gain=1
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Elements->power->Motor Drive->MLOAD
Tc=5.965 N·m K1=0 K2=0.0017 K3=0Jres=0.1 Kg·m2
Realment és molt estrany que un motor hagi de arrossegar una càrrega amb unacomponent resistiva constant, però en aquest cas s’ha agafat perquè model de motorelèctric que te el PSIM no inclou pèrdues mecàniques i això fa que el rotor no s’aturimai, per a evitar aquest succés li fiquem una component resistiva constant i fem que elrotor tendeixi a aturar-se, per tal de apropar el model d’anàlisi s’analitzen les diferenciesentre els diferents tipus de frenat.
Paràmetres de simulació
TS=0.001s TT=6 PT=0s PS=1
3.1.2.2 Esquema a utilitzar en el en el frenat a rotor lliure
3.1.2.3 Aparells a utilitzar el frenat a contracorrent
El frenat a contracorrent s’aconsegueix permutant dues fases, tal i com es veu enla figura 3.2. Això provoca que aquest tipus de frenat sigui molt fort i malmet el aï llantdel bobinat, per aquest motiu sols es recomana en casos d’emergència o en motors derotor bobinat.
Si mantenim l’alimentació del motor desprès de arribar a la velocitat nula elmotor es ficarà a girar en sentit contrari.
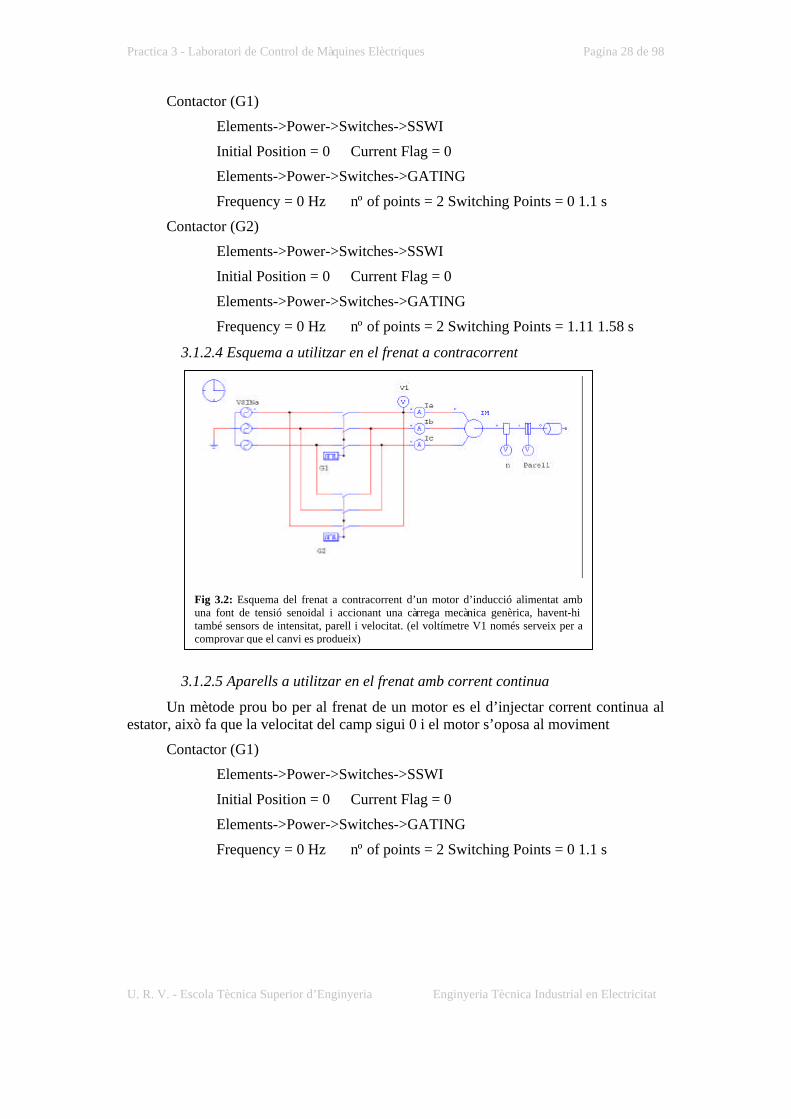
Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 28 de 98
Fig 3.2: Esquema del frenat a contracorrent d’un motor d’inducció alimentat ambuna font de tensió senoidal i accionant una càrrega mecànica genèrica, havent-hitambé sensors de intensitat, parell i velocitat. (el voltímetre V1 només serveix per acomprovar que el canvi es produeix)
Contactor (G1)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 0 1.1 s
Contactor (G2)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 1.11 1.58 s
3.1.2.4 Esquema a utilitzar en el frenat a contracorrent
3.1.2.5 Aparells a utilitzar en el frenat amb corrent continua
Un mètode prou bo per al frenat de un motor es el d’injectar corrent continua alestator, això fa que la velocitat del camp sigui 0 i el motor s’oposa al moviment
Contactor (G1)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches->GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 0 1.1 s

Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 29 de 98
Fig 3.3: Esquema del frenat amb corrent continua d’un motor d’inducció alimentatamb una font de tensió senoidal i accionant una càrrega mecànica genèrica, havent-hitambé sensors de intensitat, parell i velocitat. (el voltímetre V1 només serveix per acomprovar que el canvi es produeix)
Contactor (G2)
Elements->Power->Switches->SSWI
Initial Position = 0 Current Flag = 0
Elements->Power->Switches-> GATING
Frequency = 0 Hz nº of points = 2 Switching Points = 1.11 2.8 s
Font de tensió continua
Elements->Sources->Voltage->VDC
Amplitude=25V
3.1.2.6 Esquema a utilitzar en el frenat amb corrent continua
3.1.3 Tasques a realitzar per l’alumne
3.1.3.1 Frenat a rotor lliure
Es recomana guardar tots els circuits que feu perquè en el apartat de qüestions seus demanaran preguntes relacionades amb els diferents tipus de frenat a la vegada.
Com s’ha esmentat anteriorment una càrrega amb una component constant es unacosa molt estranya, però es pot ajustar a força a la realitat si canviem els valors de lacàrrega.
Troba quan tarda el motor a aturar-se.
3.1.3.2 Frenat a contracorrent
S’han de trobar les següents variables:
- T= temps que tarda en frenar el motor d’inducció
- Imax=(intensitat màxima de pic en l’instant en que el motor deixa el seu estat derepòs, pot ser positiva o negativa, i pot estar en qualsevol de les tres fases)
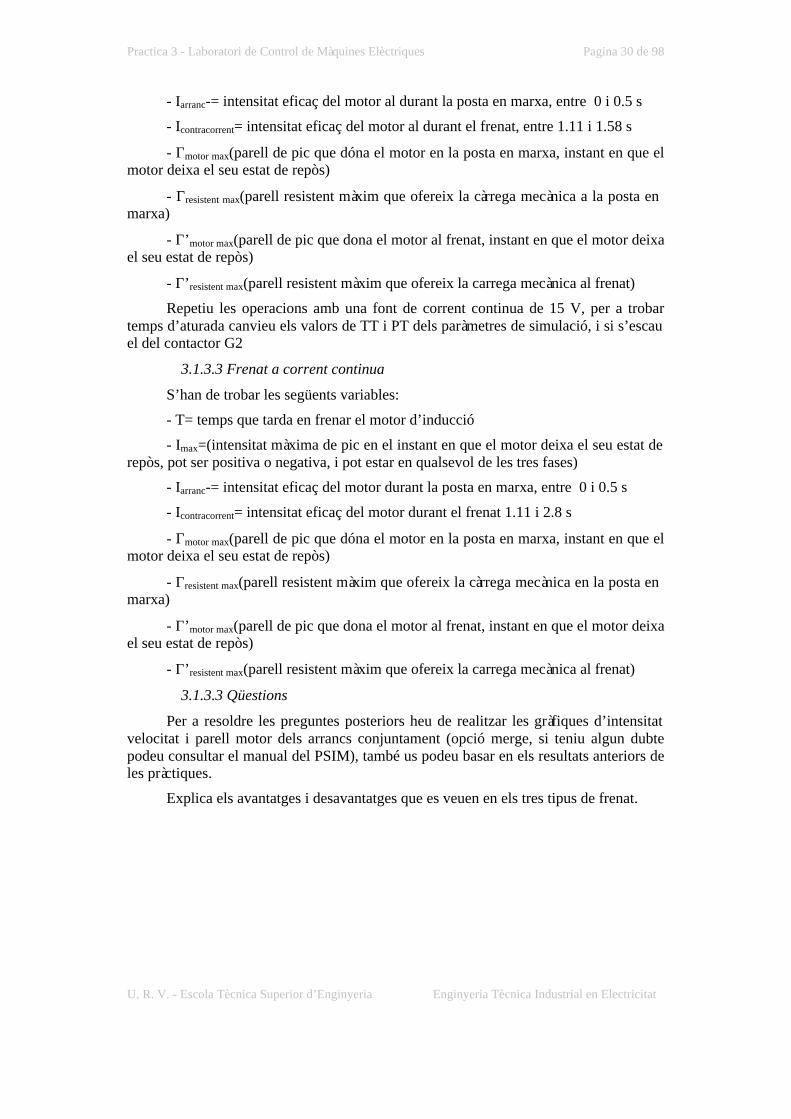
Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 30 de 98
- Iarranc-= intensitat eficaç del motor al durant la posta en marxa, entre 0 i 0.5 s
- Icontracorrent= intensitat eficaç del motor al durant el frenat, entre 1.11 i 1.58 s
- Γmotor max(parell de pic que dóna el motor en la posta en marxa, instant en que elmotor deixa el seu estat de repòs)
- Γresistent max(parell resistent màxim que ofereix la càrrega mecànica a la posta enmarxa)
- Γ’motor max(parell de pic que dona el motor al frenat, instant en que el motor deixael seu estat de repòs)
- Γ’resistent max(parell resistent màxim que ofereix la carrega mecànica al frenat)
Repetiu les operacions amb una font de corrent continua de 15 V, per a trobartemps d’aturada canvieu els valors de TT i PT dels paràmetres de simulació, i si s’escauel del contactor G2
3.1.3.3 Frenat a corrent continua
S’han de trobar les següents variables:
- T= temps que tarda en frenar el motor d’inducció
- Imax=(intensitat màxima de pic en el instant en que el motor deixa el seu estat derepòs, pot ser positiva o negativa, i pot estar en qualsevol de les tres fases)
- Iarranc-= intensitat eficaç del motor durant la posta en marxa, entre 0 i 0.5 s
- Icontracorrent= intensitat eficaç del motor durant el frenat 1.11 i 2.8 s
- Γmotor max(parell de pic que dóna el motor en la posta en marxa, instant en que elmotor deixa el seu estat de repòs)
- Γresistent max(parell resistent màxim que ofereix la càrrega mecànica en la posta enmarxa)
- Γ’motor max(parell de pic que dona el motor al frenat, instant en que el motor deixael seu estat de repòs)
- Γ’resistent max(parell resistent màxim que ofereix la carrega mecànica al frenat)
3.1.3.3 Qüestions
Per a resoldre les preguntes posteriors heu de realitzar les gràfiques d’intensitatvelocitat i parell motor dels arrancs conjuntament (opció merge, si teniu algun dubtepodeu consultar el manual del PSIM), també us podeu basar en els resultats anteriors deles pràctiques.
Explica els avantatges i desavantatges que es veuen en els tres tipus de frenat.
Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 31de 98
3.2 INFORME DE MÈTODES DE FRENAT D’UN MOTOR D’INDUCCIÓ
3.2.1 Introducció
Per a segons quins treballs els motors elèctrics han de parar.
Els principals mètodes per aturar un motor d’inducció són el de frenat acontracorrent, i el frenat amb corrent continua, una altra forma de aturar el motor seriadeixant el rotor lliure, però això ja no seria ben be un mètode de frenat.
El frenat a contracorrent presenta una oposició al gir més forta que els altres tres,si ens basem en la formula del parell podem veure clarament que el parell és negatiu, jaque la tensió és negativa.
2
2
2
'·
·
'·3
XccSn
RrRs
Usf
Sn
Rr
s +
+
=Γω
= - (1.2)
L’altre mètode de frenat es fa aplicant corrent continua a dos de les tres fases delmotor, el fet d’aplicar una corrent continua fa que no hi hagi un camp giratori sinó benbe al contrari, que el motor tendeixi a aturar-se, ja que la freqüència és 0, a resultesd’això la velocitat del camp també és 0
2
0·60
p
60·f n sinc == =0 (1.4)
3.2.2 Frenat a rotor lliure
temps de aturada = 5.86-1.11=4.75 segons, T=4.75 s
El motor d’inducció tarda 4.75 segons a aturar-se
3.2.3 Frenat a contracorrentParàmetre Abreviació Resultat Unitat
Temps que tarda el motor aaturar-se
T 1.63-1.11 = 0.52 s
intensitat màxima de pic, faseC
Imax 372.11 A
intensitat eficaç durant en laposta en marxa, fase A
Iarranc 118.48 Min-1
intensitat eficaç durant elfrenat, fase A
Icontracorrent 167.58 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 378.5 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 99.12 N.m
parell de pic que dona el motoral frenat
Γ’motor max 430.44 N.m
parell resistent màxim queofereix la carrega mecànica al
frenat
Γ’resistent max 75.33 N.m
-
+

Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 32de 98
3.2.3 Frenat amb corrent continua
Amb una font de tensió de 25 V.Paràmetre Abreviació Resultat Unitat
Temps que tarda el motor aaturar-se
T 2.54-1.11 = 1.43 s
intensitat màxima de pic, faseC
Imax 372.11 A
intensitat eficaç en el instant enla posta en marxa, fase A
Iarranc 118.48 Min-1
intensitat eficaç en el instantdel frenat, fase A
Icontracorrent 57.19 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 378.5 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 99.12 N.m
parell de pic que dona el motoral frenat
Γ’motor max 309.53 N.m
parell resistent màxim queofereix la carrega mecànica al
frenat
Γ’resistent max 45.33 N.m
Amb una font de tensió de 15 V.Paràmetre Abreviació Resultat Unitat
Temps que tarda el motor aaturar-se
T 3.20-1.11 = 2.89 s
intensitat màxima de pic, faseA
Imax 260.99 A
intensitat eficaç en el instant enla posta en marxa, fase A
Iarranc 118.48 Min-1
intensitat eficaç en el instantdel frenat, fase A
Icontracorrent 36.96 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 378.5 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 99.12 N.m
parell de pic que dona el motoral frenat
Γ’motor max 278.55 N.m
parell resistent màxim queofereix la carrega mecànica al
frenat
Γ’resistent max 37.48 N.m

Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 33de 98
3.2.4 Conclusions generals
A continuació es mostraran les gràfiques comparatives de intensitat velocitat iparell de els tres frenats conjuntament.
Fig. 3.4: Gràfica de les totes les intensitats (roig frenat amb corrent continua de 15V, blau frenat a contracorrent, verd frenat a rotor lliure, violeta frenat amb correntcontinua de 25 V) que els hi sortirà als alumnes.
Fig. 3.5: Gràfica de les tres velocitats (roig frenat amb corrent continua de 15 V,blau frenat a contracorrent, verd frenat a rotor lliure, violeta frenat amb correntcontinua de 25 V) que els hi sortirà als alumnes.
Fig. 3.6: Gràfica de les tres parells motor (roig frenat amb corrent continua de 15 V,blau frenat a contracorrent, verd frenat a rotor lliure, violeta frenat amb correntcontinua de 25 V) que els hi sortirà als alumnes.

Practica 3 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 34de 98
Avantatges i desavantatges que es veuen en els tres tipus de frenat.
Frenat a rotor Lliure
Avantatges
no aporta cap cost addicional a la màquina
no malmet els aï llants del bobinat del motor
Desavantatges
no es controla el temps de aturada
Frenat a contracorrent
Avantatges
para la maquina ràpidament
es relativament barat
Desavantatges
malmet els aï llants del bobinat del motor
Frenat amb corrent continua
Avantatges
es pot regular el temps de aturada del motor
Desavantatges
aporta un cost addicional a la màquina

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 35 de 98
4 PRÀCTICA - 4
4.1 DIFERÈNCIA ENTRE L’ANÀLISI D’UN MOTOR ASÍNCRONMITJANÇANT EL MÈTODE TRADICIONAL I EL PSIM
4.1.1 OBJECTIU
L’objectiu d’aquesta pràctica es el de veure quines diferències hi ha entre elmètode tradicional i gràfic del diagrama del cercle l’obtenció del mateix mitjançant elPSIM. Aquesta pràctica no pretén demostrar que el PSIM és un mètode d’anàlisi millor,sinó que és un mètode d’assaig teòric en que és pretén simular el comportament d’unmotor abans de la seva fabricació o si més no el seu comportament amb diferentssituacions d’una manera simple i didàctica.
També servirà per a recordar com es realitza el diagrama del cercle.
4.1.2 ESQUEMA I VALORS INICIALS
El diagrama del cercle es construeix a partir de dos assaigs:
Assaig en curtcircuit
Assaig en buit
Primer es realitzaran aquests dos assaigs i els compararem amb un altre assaig acurtcircuit a tensió nominal per tal de comparar-lo, aquest valor serà la intensitat decurtcircuit que agafarem per realitzar el diagrama del cercle.
4.1.2.1 Assaig en curtcircuit.
En aquest assaig heu d’anar canviant la tensió de font trifàsica fins arribar a laintensitat de nominal, per tal de determinar l’intensitat de curtcircuit del diagrama delcercle.
Font de tensió trifàsica:
Elements->Sources->Voltage->VSIN3
V= 35.8 V f=50 Hz δ=0º
Motor d’inducció trifàsic:
Elements->Power->Motor Drive->INDM_3S
Rs= 0.2Ω Ls=0.001146H Rr=0.3ΩLr=0.001146H Lm=0.05507H p=4 Jm=0.3Kg·m2
Torque Flag=1 Master/Slave Flag=1
Velocitat mecànica constant
Elements->power->Motor Drive->MLOAD_P
CS=0 min-1 Jres=0 Kg·m2
Paràmetres de simulació
TS=0.001s TT=5 PT=0s PS=1

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 36 de 98
Fig 4.1: Esquema de l’assaig a curtcirtcuit d’un motor d’inducció alimentat amb unafont de tensió senoidal i frenat per una càrrega que fixa la velocitat, havent-hi tambésensors d’intensitat i velocitat.(el sensor de velocitat n només serveix per comprovarque el rotor no es mou)
4.1.2.2 Esquema a utilitzar en el assaig a curtcircuit
4.1.2.3 Aparells a utilitzar per a prendre mesures del motor en buit i a règimnominal
El esquema a utilitzar en els assaigs en buit i el funcionament a règim nominal esel mateix, només canvia que el motor no suporta cap càrrega mecànica.
La tensió és de 240 V per a tots dos assaigs
a) paràmetres dels elements en buit
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3)
Tc=0 N·m K1=0 K2=0 K3=0Jres=0.1 Kg·m2
Paràmetres de simulació
TS=0.001s TT=5 PT=0s PS=1
b) paràmetres dels elements a regim permanent
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3)
Tc= 54.785 N·m K1=0 K2=0 K3=0Jres=0.1 Kg·m2
Paràmetres de simulació
TS=0.001s TT=5 PT=0s PS=1

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 37 de 98
Fig 4.2: Esquema per a agafar mesures del motor en buit o a regim nominal d’unmotor d’inducció alimentat amb una font de tensió senoidal amb una càrregamecànica, havent-hi també sensors de intensitat i velocitat, i parell.
4.1.2.4 Esquema a utilitzar per agafar mesures del motor en buit o a règimnominal
4.1.3 Tasques a realitzar per l’alumne
4.1.3.1 Diagrama del cercle
a) L’assaig en curtcircuit ja s’ha fet a tensió de curtcircuit, s’han de trobar elsaltres valors representatius per a la construcció del diagrama del cercle.
Vcc= tensió de curtcircuit (és la tensió que amb el rotor bloquejat s’arriba aintensitat nominal ) (V)
Icc= intensitat de curtcircuit , en el nostre cas és la mateixa que la nominal (A)
Pcc= potencia de curtcircuit (W)
Cosϕcc= factor de potencia de curtcircuit, IV
P
··3cos =ϕ (4.1)
formula 4.1
Cosϕ = factor de potència
P = potencia activa (W)
V = tensió (V)
I = intensitat (A)
Amb aquestes dades heu de trobar Icc nominal, amb la que realitzareu eldiagrama del cercle.
cc
cc
rp
rpcc IU
UI ·, = (4.2)
formula 4.2
Icc,rp = intensitat de curtcircuit a règim permanent
Urp = tensió a règim permanent (W)
Ucc = tensió de curt circuit(V)
Icc = intensitat de curtcircuit (A)

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 38 de 98
Ja que amb el PSIM podem simular el curtcircuit agafeu aquesta dada per tal decomparar-la amb la intensitat de curtcircuit deduï da en el apartat anterior.
b) realitzeu l’assaig en buit i trobeu les variables
I0= intensitat en buit es la intensitat que el motor consumeix quan funciona sensecàrrega (A)
P0= potencia que consumeix el motor en buit (W)
Cosϕ0= factor de potencia quan el motor funciona en buit
c)- desenvolupeu el diagrama del cercle i trobeu els valors de
- S= lliscament en regim permanent.
- nrp = RPM velocitat en regim permanent, (min-1)
- ηrp = rendiment del motor a regim permanent
- cosϕrp = factor de potencia a regim permanent
- ηmax = rendiment màxim del motor.
- cosϕmax = factor de potencia a màxim
- Pu = potència útil a règim permanent (W)
- Prp = potència activa a règim permanent absorbida (W)
- Srp = potència aparent a règim permanent absorbida (VA)
- Qrp = potència reactiva a règim permanent absorbida (VAr)
- Pfixes = pèrdues fixes Pfe + Pme (W) a règim permanent
- Pj2rp = pèrdues del coure al rotor a règim permanent (W)
- Pj1rp = pèrdues del coure al estator a règim permanent
- Γrp = parell útil nominal
- Γa = parell útil de posta en marxa
- Γmax = parell útil nominal
- Relació entre parell màxim i el nominal rpΓ
Γmax
- Grau de estabilitat (relació entre parell màxim i el nominal) rp
a
ΓΓ
4.1.3.2 Obtenció de mesures a règim nominal
Obtén les mesures més representatives del motor, per tal de comparar-les amb
- S = lliscament en règim permanent.
- nrp = RPM velocitat en règim permanent, (min-1)
- cosϕrp = factor de potencia a règim permanent
- Pu = potència útil a règim permanent (W)

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 39 de 98
- Prp = potència activa a règim permanent absorbida (W)
- Srp = potència aparent a règim permanent absorbida (VA)
- Qrp = potència reactiva a règim permanent absorbida (VAr)
- Γrp = parell útil a règim permanent
- Γa = parell útil de posta en marxa
- Γmax = parell útil màxim
4.1.3.3 Qüestions
a)Analitza les diferències que hi ha entre l’anàlisi amb el diagrama del cercle i elPSIM
b) Explica les conclusions que extreus d’aquest anàlisi.
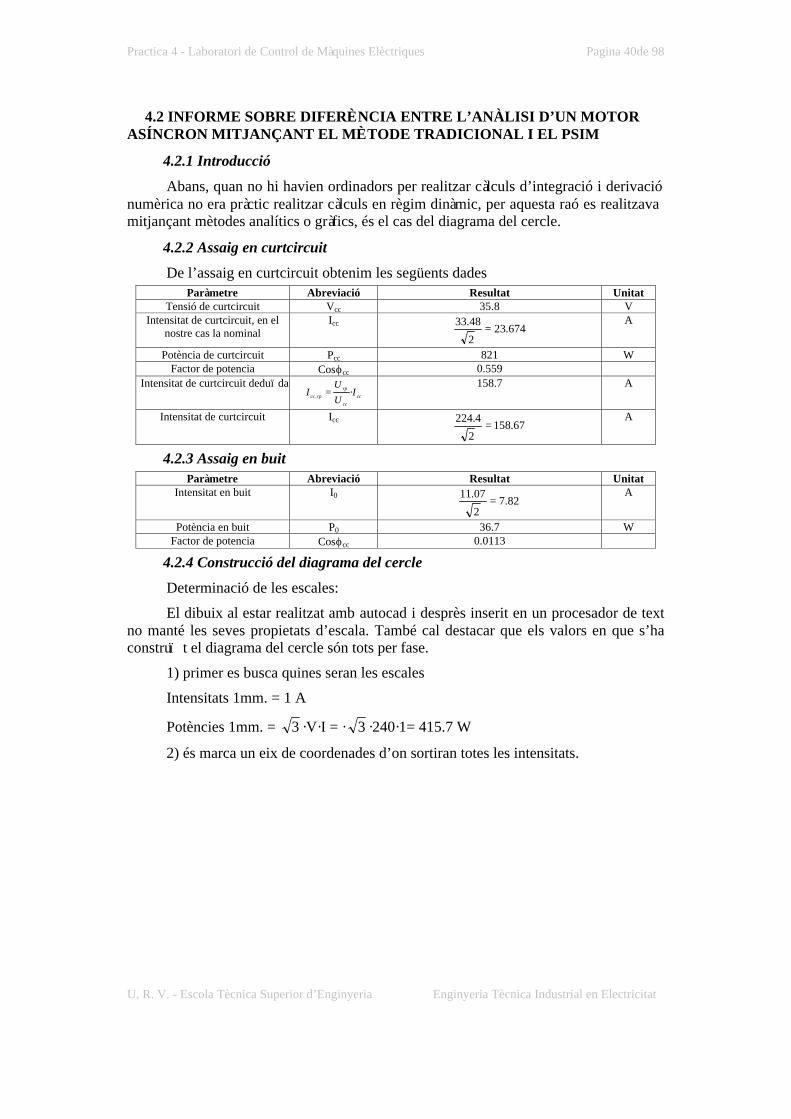
Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 40de 98
4.2 INFORME SOBRE DIFERÈNCIA ENTRE L’ANÀLISI D’UN MOTORASÍNCRON MITJANÇANT EL MÈTODE TRADICIONAL I EL PSIM
4.2.1 Introducció
Abans, quan no hi havien ordinadors per realitzar càlculs d’integració i derivaciónumèrica no era pràctic realitzar càlculs en règim dinàmic, per aquesta raó es realitzavamitjançant mètodes analítics o gràfics, és el cas del diagrama del cercle.
4.2.2 Assaig en curtcircuit
De l’assaig en curtcircuit obtenim les següents dadesParàmetre Abreviació Resultat Unitat
Tensió de curtcircuit Vcc 35.8 VIntensitat de curtcircuit, en el
nostre cas la nominalIcc
674.232
48.33=
A
Potència de curtcircuit Pcc 821 WFactor de potencia Cosϕcc 0.559
Intensitat de curtcircuit deduïdacc
cc
rp
rpcc IU
UI ·, =
158.7 A
Intensitat de curtcircuit Icc67.158
2
4.224=
A
4.2.3 Assaig en buitParàmetre Abreviació Resultat Unitat
Intensitat en buit I082.7
2
07.11=
A
Potència en buit P0 36.7 WFactor de potencia Cosϕcc 0.0113
4.2.4 Construcció del diagrama del cercle
Determinació de les escales:
El dibuix al estar realitzat amb autocad i desprès inserit en un procesador de textno manté les seves propietats d’escala. També cal destacar que els valors en que s’haconstruï t el diagrama del cercle són tots per fase.
1) primer es busca quines seran les escales
Intensitats 1mm. = 1 A
Potències 1mm. = 3 ·V·I = · 3 ·240·1= 415.7 W
2) és marca un eix de coordenades d’on sortiran totes les intensitats.

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 41de 98
3) és traça la intensitat en buit i la de curtcircuit amb el seu angle corresponentI0f ϕ0 Iccf ϕcc
Real 7.82 89.35 158.7 56.01Diagrama(mm) 7.82 158.7
4) és busca el centre de la circumferència.
- unir Po amb Pcc i realitzar una mediatriu.
- fer una vertical des de Po fins el punt Pcc i traçar una mediatriu de la mateixafins que creui amb l’altra mediatriu i allí estarà el centre.
- realitzar la circumferència.
5) posar Pj1cc (pèrdues per efecte Joule a l’estator) per trobar la línia del par itambé per trobar la P∞, que ens servirà per a trobar el lliscamen:
.975.17.415
821
7.415Pj1cc mm
tcurtcircuipotenciade===
Fig. 4.3: Gràfica del diagrama del cercle on es troba el centre de la circumferència iels punts pcc i p0

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 42de 98
1) fer una paral·lela a la recta P∞
2) allargar la recta Pcc fins a trobar-se amb aquesta.
3) fes una circumferència des de el centre del eix de coordenades per a trobar In
4) fer una perpendicular des de I0 per a trobar ja unint dues interseccions la rectaMN i des de la P0 una altra que passi per la S obtenint el punt R
5) el lliscament és MNMR
Resultats:
El lliscament a In : %23.60623.053.152
5.9====
MN
MRS
Rpm a In :
15002
50*60*60
57.1406)0623.01·(1500)1(*
1
1
1
1
===
=−=−= −
P
fn
rpmSnn
Fig. 4.4: Gràfica del diagrama del cercle on es veuen les pèrdues per efecte joule delestator i el lliscament

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 43de 98
Per trobar el rendiment:
1) allargar la recta P0 –Pcc fins que arribi a les del eix x amb el objectiu de feruna perpendicular.
2) desprès es fa una recta paral·lela al eix x.
3) després hi ha dos punts d’interès, el de la intensitat nominal, que trobarà el parnominal i el de la recta tangent a la circumferència que marca el rendiment màxim
4) per trobar els rendiments s’allarguen els segments fins trobar-se amb laparal·lela del eix x
Mesures
Rendiment a In %18.93100·9318.0100·46.170
85.158===
nIη
Factor de potencia a In 9113.067.23
57.21==
−−
=BO
AOCos Inϕ
Rendiment màxim %34.98100·9834.0100·46.170
63.167max ===η
Factor de potencia màxima 9317.068.38
04.36max ==
−−
=DO
COCosϕ
Potencia útil nominal Pn = 15mm · 415.7 = 6235.5 W = 6.2 Kw = 8.46 cv
Fig. 4.5: Gràfica del diagrama del cercle on es veuen els rendiments i els cosinus

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 44de 98
Mesures:
Potencia activa nominal absorbida: P = 21.57 mm · 415.7 = 8966.65 W = 8.9KW
Potencia aparent nominal absorbida S = 23.67 mm · 415.7 = 9839 VA = 9.8KVA
Potencia reactiva absorbida Q = 9.7482 mm · 415.7 = 4052.32VAr = 4KVAr
Pèrdues fixes Pfixes = Pfe + Pme = 0.0887 mm · 415.7 = 36.87 W
Pèrdues del coure al rotor (In) Pj2 (In)= 6.42 mm · 415.7 = 2668.8 W
Pèrdues del coure a l’estàtor (In) P j1 (In) = 0.014 mm · 415.7 = 5.82 W
Fig. 4.6: Gràfica del diagrama del cercle on es veuen totes les potències d’un motorassincron.

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 45de 98
Per a els parells:
Per obtenir els parells principals del motor realitzem una mediatriu de la rectapar=0, la que marca el punt P∞, i on talla amb el cercle vertical als punts d’interès, ladiferència serà el par.
Mesures:
Par útil nominal: Γn = 21.57 mm · 415.7 = 8966.65 W síncrons
Par útil de posta en marxa: Γa = 86.74 mm · 415.7 = 36057 W síncrons
Par útil màxim: Γmax = 92.99 mm · 415.7 = 38656 W síncrons
Relació entre par màxim i el nominal 02.465.8966
36057max ==Γ
Γ
n
Relació entre par de posta en marxa i nominal
Grau de estabilitat: 933.038656
36057==
ΓΓ
n
a
cronsWnn
NmmKg sin1
1 *01.160
21.91 =→
π
Fig. 4.7: Gràfica del diagrama del cercle on es veuen els parells d’un motorassincron.

Practica 4 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 46de 98
4.2.5 Obtenció de dades a règim permanentParàmetre Abreviació Resultat Unitat
lliscament en regim permanent S 4.3%RPM velocitat en regim
permanent, (min-1)nrp 1435.43 Min-1
factor de potencia a règimpermanent
Cosϕrp 0.9184
potència activa a règimpermanent absorbida
Prp 9017.28 W
potència aparent a règimpermanent absorbida
Srp 9817.55 VA
potència reactiva a règimpermanent absorbida
Qrp 3882.4 Var
parell útil a règim permanent Γrp 54.783 N·mparell útil màxim Γmax 378.5 N·m
4.2.6 Conclusions generals
a)Analitza les diferències que hi trobem entre l’anàlisi amb el diagrama del cerclei el PSIM
El mètode tradicional o diagrama del cercle és un mètode que s’utilitza tenint encompte les pèrdues d’energia per efecte joule i mecàniques, això fa que el lliscamentdoni un pèl superior, d’altra banda trobem que molts valors, com ara el triangle depotències consumides i el cosinus, el manté. No succeeix el mateix amb els parells,propietat que depèn directament (per construir el cercle) de les pèrdues per a trobar elseu valor.
b) Explica les conclusions que en treus d’aquest anàlisi.
El PSIM al no considerar les pèrdues mecàniques, ni les pèrdues per efecte jouledel debanat no seria un programa per a la creació de motors; però si que ens dóna unaidea molt aproximada de com funcionarà el motor, per aquesta raó és útil per a ladocència.
Podem veure amb més detall el diagrama del cercle al apartat de annexes.
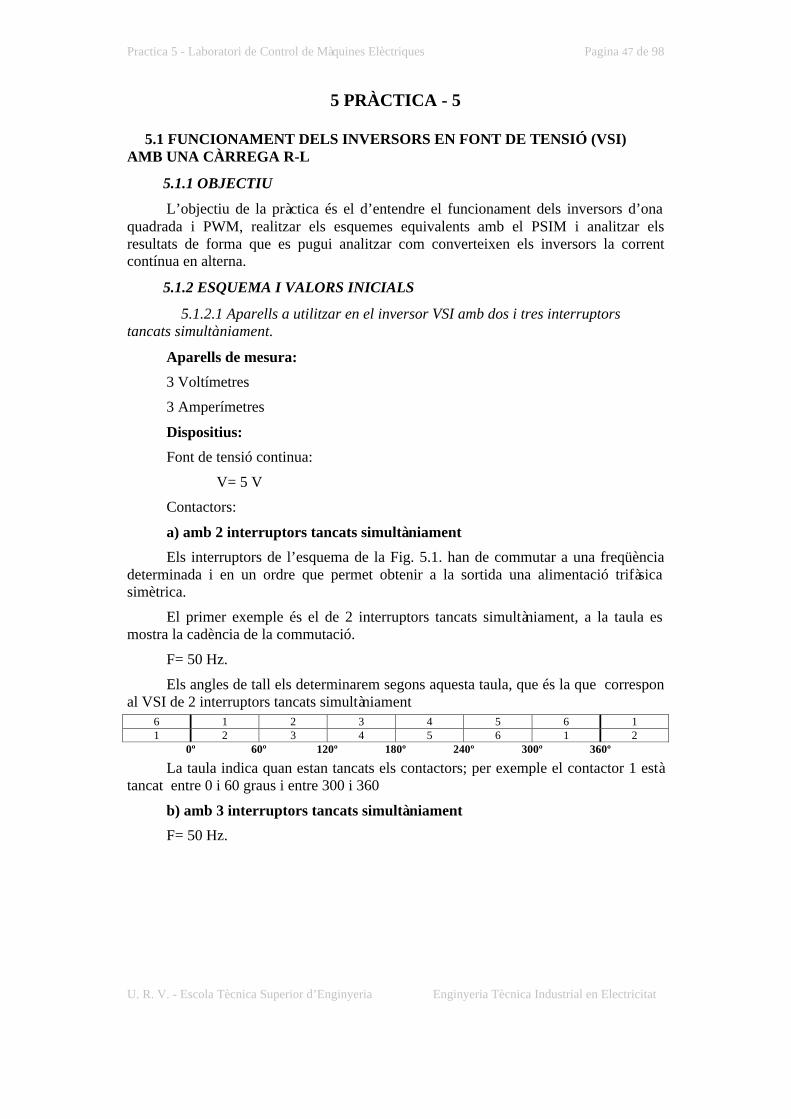
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 47 de 98
5 PRÀCTICA - 5
5.1 FUNCIONAMENT DELS INVERSORS EN FONT DE TENSIÓ (VSI)AMB UNA CÀRREGA R-L
5.1.1 OBJECTIU
L’objectiu de la pràctica és el d’entendre el funcionament dels inversors d’onaquadrada i PWM, realitzar els esquemes equivalents amb el PSIM i analitzar elsresultats de forma que es pugui analitzar com converteixen els inversors la correntcontínua en alterna.
5.1.2 ESQUEMA I VALORS INICIALS
5.1.2.1 Aparells a utilitzar en el inversor VSI amb dos i tres interruptorstancats simultàniament.
Aparells de mesura:
3 Voltímetres
3 Amperímetres
Dispositius:
Font de tensió continua:
V= 5 V
Contactors:
a) amb 2 interruptors tancats simultàniament
Els interruptors de l’esquema de la Fig. 5.1. han de commutar a una freqüènciadeterminada i en un ordre que permet obtenir a la sortida una alimentació trifàsicasimètrica.
El primer exemple és el de 2 interruptors tancats simultàniament, a la taula esmostra la cadència de la commutació.
F= 50 Hz.
Els angles de tall els determinarem segons aquesta taula, que és la que corresponal VSI de 2 interruptors tancats simultàniament
6 1 2 3 4 5 6 11 2 3 4 5 6 1 2
0º 60º 120º 180º 240º 300º 360º
La taula indica quan estan tancats els contactors; per exemple el contactor 1 estàtancat entre 0 i 60 graus i entre 300 i 360
b) amb 3 interruptors tancats simultàniament
F= 50 Hz.

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 48 de 98
Fig 5.1: Esquema del inversor VSI amb 2 i 3 interruptors tancats simultàniament,
Els angles es determinaran segons aquesta taula, que és la que correspon al VSIde 3 interruptors tancats simultàniament
1 2 3 4 5 6 1 22 3 4 5 6 1 2 33 4 5 6 1 2 3 4
0º 60º 120º 180º 240º 300º 360º
La taula indica quan estan tancats els contactors, per exemple el contactor 1 estàtancat entre 180 i 360 graus.
5.1.2.2 Esquema a utilitzar en el inversor VSI amb dos i tres interruptorstancats simultàniament
5.1.2.3 Aparells a utilitzar l’ inversor VSI-PWM
L’inversor VSI-PWM funciona d’una manera diferent, és un mètode més adientper realitzar la conversió a corrent alterna, ho realitza fent la suma d’una ona modulant(senoidal) més una de portadora (triangular).
Índex de modulació: relaciona la tensió pic a pic de la ona modulant amb
p
m
V
VM = (5.1)
Fòrmula 5.1
M= índex de modulació
Vm= tensió de pic a pic de la ona modulant (V)
Vp= tensió de pic de l’ona modulant (V)
Ratio de freqüència: el ràtio de freqüència és la relació entre la freqüència de laona portadora i la modulant. Per tal d’eliminar els harmònics parells i múltiples de tresnomés el ratio de freqüència (Formula 5.2) ha de ser senar i no ha de ser múltiple detres.

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 49 de 98
Fig 5.3: Esquema del Inversor VSI-PWM
Fig 5.2: Esquema del circuit per a generar una ona PWM per comparació d’una onasenoidal amb una de triangular.
m
p
f
fIf = (5.2)
Formula 5.2
If: ratio de freqüència
Fp: freqüència de la ona modulant (Hz)
Fm: freqüència de la ona portadora (Hz)
5.1.2.4 Esquema del inversor VSI-PWM
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 50 de 98
5.1.3 Tasques a realitzar per l’alumne
5.1.3.1 Inversor VSI amb dos i tres interruptors tancats simultàniament
Per a les pràctiques de dos i tres interruptors tancats simultàniament s’han derealitzar les següents proves:
1) ficar a la càrrega 1 Ω i 0 H., a no ser que es necessiti modificar-los elsparàmetres de la simulació son:
TS=0.00005s TT=0.2s PT=0s PS=1
2) visualitza V1, V2 i V3 i comprova que estan desfasades 120º
3) analitza les intensitats, tensió de línia i tensió de fase, I1, V1 i V1-V2 i els seusharmònics, per analitzar els harmònics de cada corba recorda que s’han d’agafar unnombre sencer de períodes i pitja la opció FFT.
4) comprova que l’amplitud dels harmònics va disminuint a mesura queaugmenta l’ordre d’aquest, per a comprovar-ho agafa una amplitud de 1 Mhz.
5) repeteix els passos 2 3 i 4 amb una càrrega de 1 Ω i 0.01 H.
5.1.3.2 Inversor VSI-PWM
1) realitzar el circuit de la figura 5.2 i fica els següents paràmetres
Font de tensió senoidal
Vmax= 1 V f=50 Hz ϕ=18º DC offset = 0 V Tstart= 0 s
Font de tensió triangular
Vpp=2.4 V f=250 Hz. D=0.5 DC offset= -1.2 V Tstart = 0 s
Resistència
R= 1 Ω
Paràmetres de simulació
TS=0.00002s TT=0.08s PT=0.02s PS=1
2) visualitza en una mateixa gràfica les tres tensions del sistema.
3) agafa un nombre sencer de períodes de l’ona de sortida i comproveu que elsharmònics més importants apareixen al voltant de la freqüència de l’ona portadora i elsseus múltiples. Cal fixar-se també en la gran magnitud que presenten els harmònicsrespecte la ona fonamental.
4) modifica els paràmetres adients en el cas de que l’ona portadora tingui unafreqüència de 450 Hz. (If=9). Cal que l’ona de sortida sigui perfectament simètrica(ϕ=9º).
5) comprova que en aquest cas els harmònics de l’ona de sortida apareixen alvoltant de la freqüència de l’ona portadora.

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 51 de 98
6) realitza el circuit de la figura 5.3 i introdueix els valors a la càrrega 1 Ω i 0 H. iels següents paràmetres:
Font de tensió trifàsica
V= 0.8 V f=50 Hz ϕ=6º
Font de tensió triangular
Vpp=2.4 V f=750 Hz. D=0.5 DC offset= -1.2 V Tstart = 0 s
Resistència
R= 1 Ω
Fonts de tensió continua
V=5 V
Paràmetres de simulació
TS=0.00002s TT=0.08s PT=0.02s PS=1
7) visualitza V1-V2, i V2-V3 i comprova que estan desfasades 120º
8) analitza els harmònics i de les intensitats, tensió de línia i tensió de fase, I1, V1i V1-V2, per analitzar els harmònics de cada corba recorda que s’han d’agafar unnombre sencer de períodes i polsar la opció FFT, aquest cop.
9) comprova que l’amplitud dels harmònics va minvant a mesura que augmental’ordre d’aquest, per a comprovar-ho agafa una amplitud de 1 Mhz.
10) repeteix els passos 7 8 i 9 amb una càrrega de 1 Ω i 0.01 H.
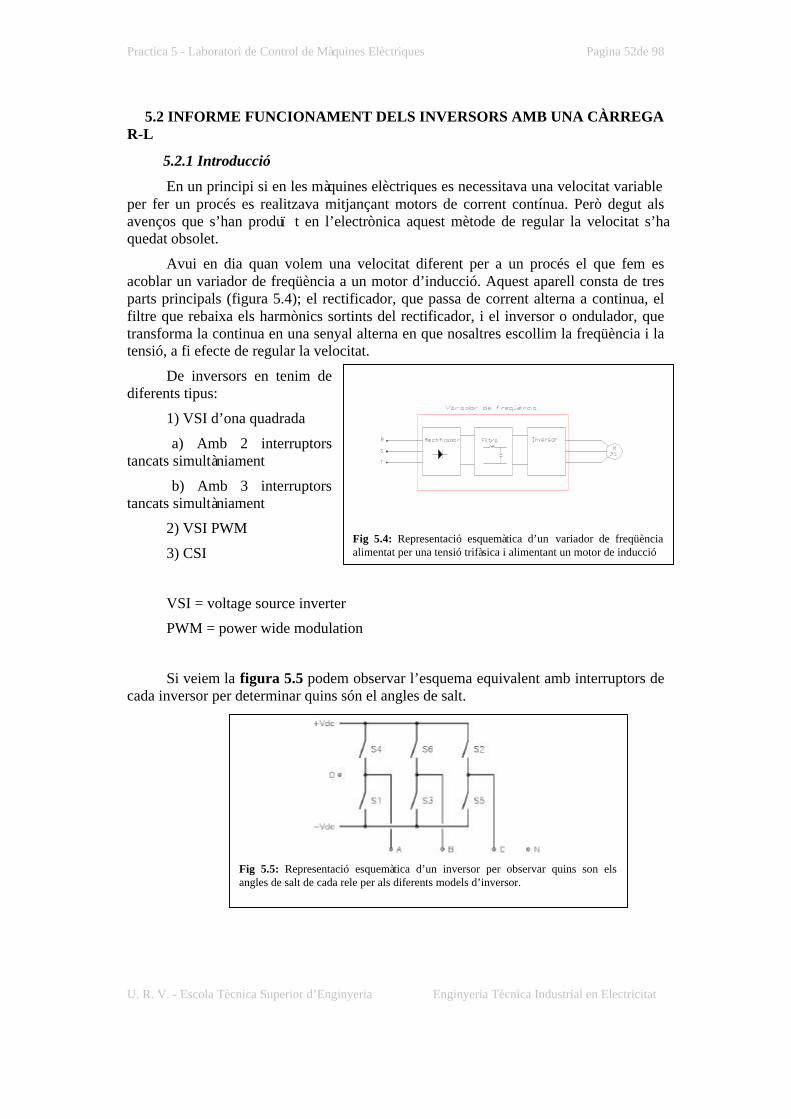
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 52de 98
5.2 INFORME FUNCIONAMENT DELS INVERSORS AMB UNA CÀRREGAR-L
5.2.1 Introducció
En un principi si en les màquines elèctriques es necessitava una velocitat variableper fer un procés es realitzava mitjançant motors de corrent contínua. Però degut alsavenços que s’han produï t en l’electrònica aquest mètode de regular la velocitat s’haquedat obsolet.
Avui en dia quan volem una velocitat diferent per a un procés el que fem esacoblar un variador de freqüència a un motor d’inducció. Aquest aparell consta de tresparts principals (figura 5.4); el rectificador, que passa de corrent alterna a continua, elfiltre que rebaixa els harmònics sortints del rectificador, i el inversor o ondulador, quetransforma la continua en una senyal alterna en que nosaltres escollim la freqüència i latensió, a fi efecte de regular la velocitat.
De inversors en tenim dediferents tipus:
1) VSI d’ona quadrada
a) Amb 2 interruptorstancats simultàniament
b) Amb 3 interruptorstancats simultàniament
2) VSI PWM
3) CSI
VSI = voltage source inverter
PWM = power wide modulation
Si veiem la figura 5.5 podem observar l’esquema equivalent amb interruptors decada inversor per determinar quins són el angles de salt.
Fig 5.4: Representació esquemàtica d’un variador de freqüènciaalimentat per una tensió trifàsica i alimentant un motor de inducció
Fig 5.5: Representació esquemàtica d’un inversor per observar quins son elsangles de salt de cada rele per als diferents models d’inversor.
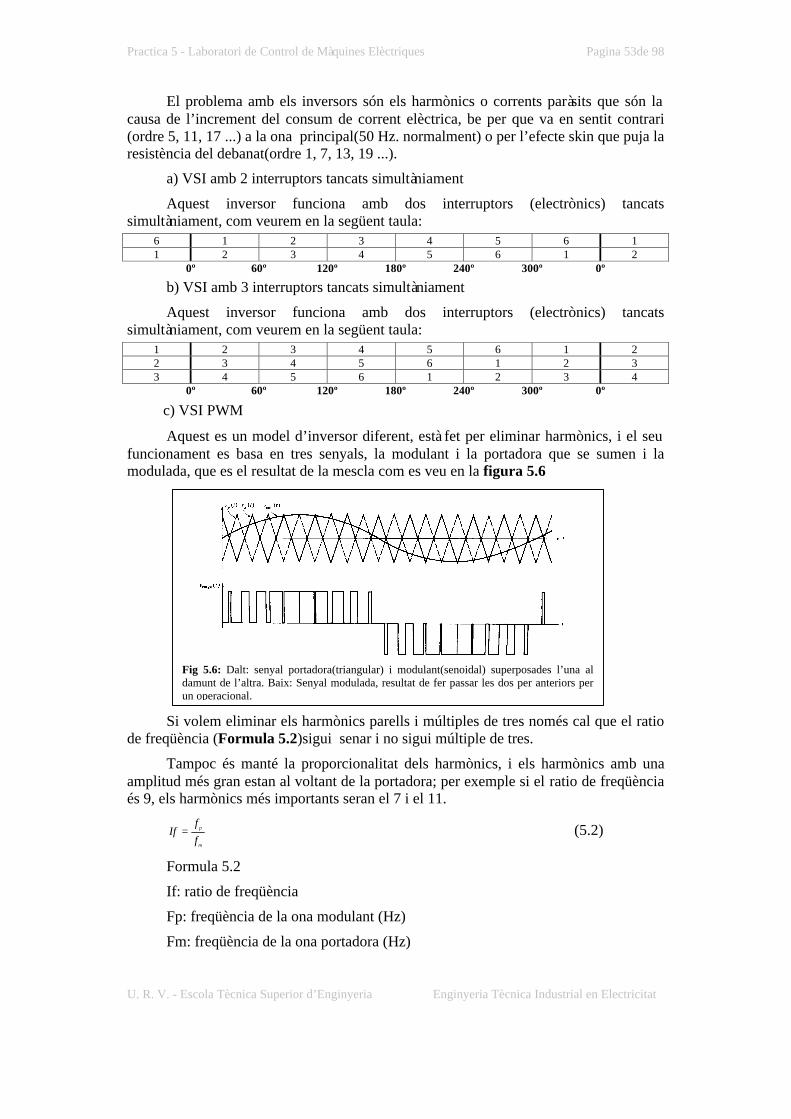
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 53de 98
El problema amb els inversors són els harmònics o corrents paràsits que són lacausa de l’increment del consum de corrent elèctrica, be per que va en sentit contrari(ordre 5, 11, 17 ...) a la ona principal(50 Hz. normalment) o per l’efecte skin que puja laresistència del debanat(ordre 1, 7, 13, 19 ...).
a) VSI amb 2 interruptors tancats simultàniament
Aquest inversor funciona amb dos interruptors (electrònics) tancatssimultàniament, com veurem en la següent taula:
6 1 2 3 4 5 6 11 2 3 4 5 6 1 2
0º 60º 120º 180º 240º 300º 0º
b) VSI amb 3 interruptors tancats simultàniament
Aquest inversor funciona amb dos interruptors (electrònics) tancatssimultàniament, com veurem en la següent taula:
1 2 3 4 5 6 1 22 3 4 5 6 1 2 33 4 5 6 1 2 3 4
0º 60º 120º 180º 240º 300º 0º
c) VSI PWM
Aquest es un model d’inversor diferent, està fet per eliminar harmònics, i el seufuncionament es basa en tres senyals, la modulant i la portadora que se sumen i lamodulada, que es el resultat de la mescla com es veu en la figura 5.6
Si volem eliminar els harmònics parells i múltiples de tres només cal que el ratiode freqüència (Formula 5.2)sigui senar i no sigui múltiple de tres.
Tampoc és manté la proporcionalitat dels harmònics, i els harmònics amb unaamplitud més gran estan al voltant de la portadora; per exemple si el ratio de freqüènciaés 9, els harmònics més importants seran el 7 i el 11.
m
p
f
fIf = (5.2)
Formula 5.2
If: ratio de freqüència
Fp: freqüència de la ona modulant (Hz)
Fm: freqüència de la ona portadora (Hz)
Fig 5.6: Dalt: senyal portadora(triangular) i modulant(senoidal) superposades l’una aldamunt de l’altra. Baix: Senyal modulada, resultat de fer passar les dos per anteriors perun operacional.

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 54de 98
5.2.2 VSI amb 2 interruptors tancats simultàniament
Per veure que estan desfasats 120º tenim que el temps en que comença cada onaés diferent.
El temps que tarda a realitzar-se un cicle es 02.050
1= segons, per tant el que
estiguin desfasats 120º significa que d’una ona a la següent triga
006666.002.0·360
120= segons.
Desfasament entre V1 i V2
Temps en que comença V2 menys temps que comença V1= 0.1 – 0.0044=0.0066segons
Desfasament entre V2i V3
Temps en que comença V3 menys temps que comença V2= 0.166 – 0.01=0.0066segons
Desfasament entre V3 i V1 del següent cicle
Temps en que comença V2 menys temps que comença V1= 0.232 –0.0166=0.0066
Fig 5.7: senyal de les tensions de fase per a comprovar que estan desfasades 120º
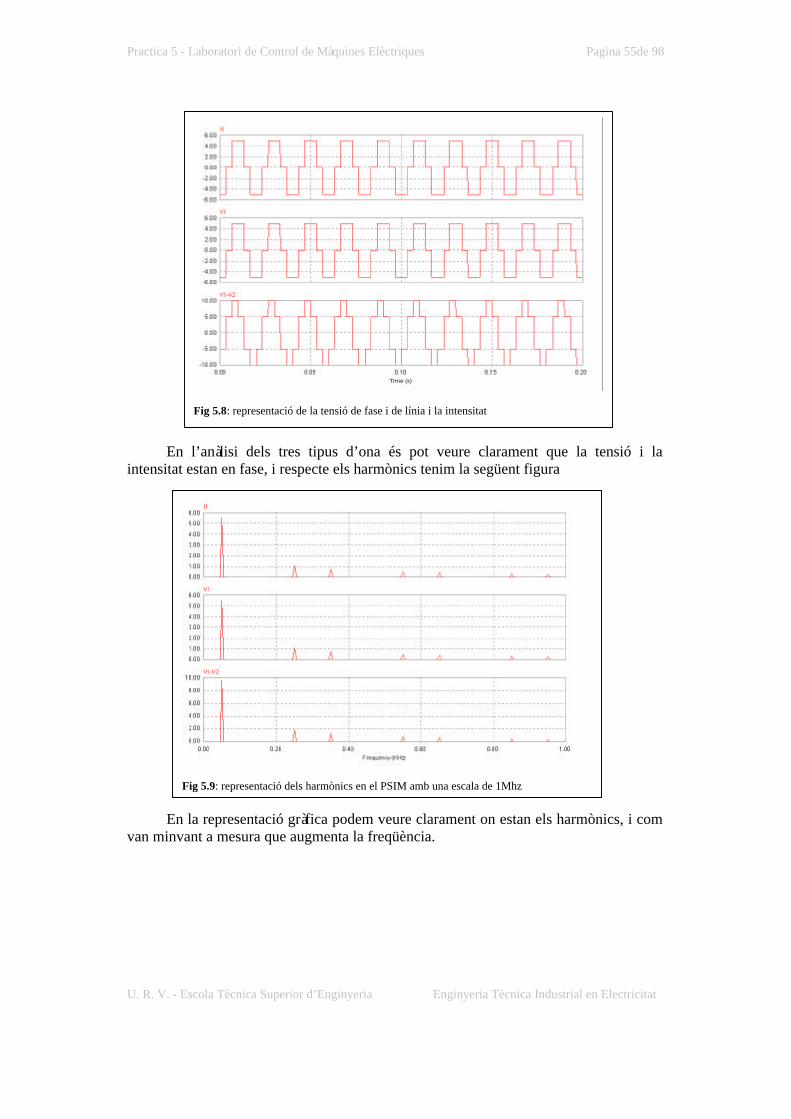
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 55de 98
En l’anàlisi dels tres tipus d’ona és pot veure clarament que la tensió i laintensitat estan en fase, i respecte els harmònics tenim la següent figura
En la representació gràfica podem veure clarament on estan els harmònics, i comvan minvant a mesura que augmenta la freqüència.
Fig 5.9: representació dels harmònics en el PSIM amb una escala de 1Mhz
Fig 5.8: representació de la tensió de fase i de línia i la intensitat
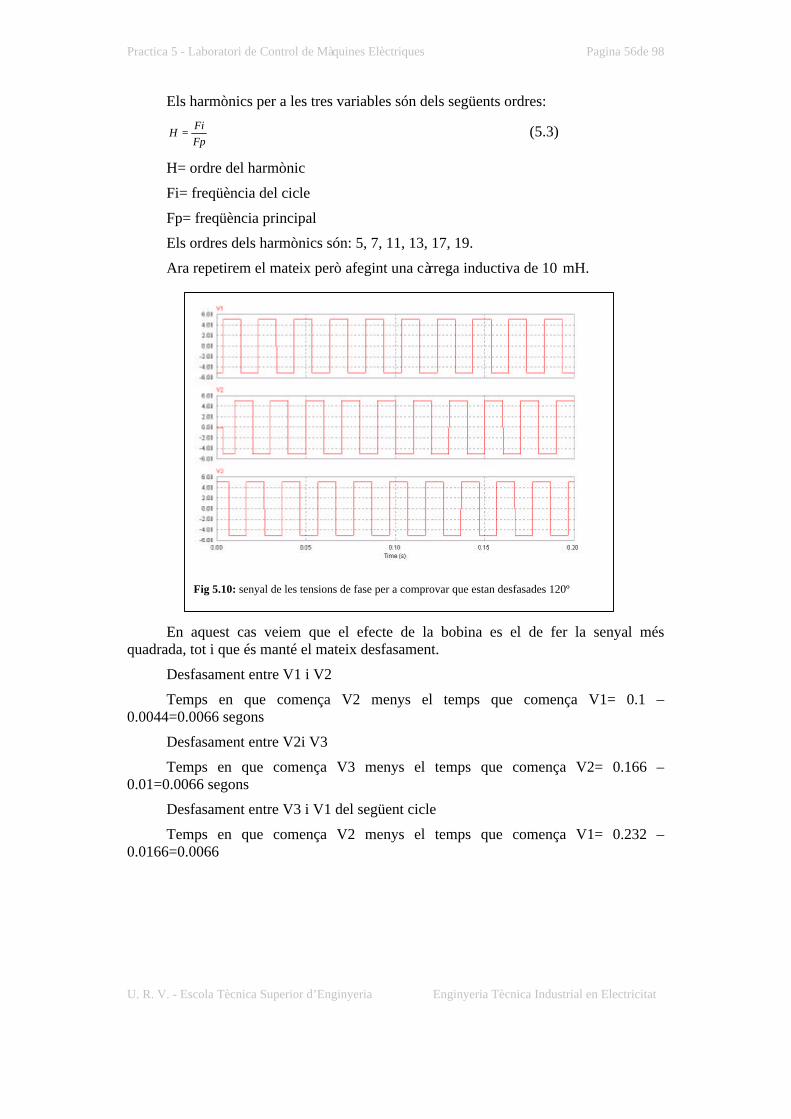
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 56de 98
Els harmònics per a les tres variables són dels següents ordres:
Fp
FiH = (5.3)
H= ordre del harmònic
Fi= freqüència del cicle
Fp= freqüència principal
Els ordres dels harmònics són: 5, 7, 11, 13, 17, 19.
Ara repetirem el mateix però afegint una càrrega inductiva de 10 mH.
En aquest cas veiem que el efecte de la bobina es el de fer la senyal mésquadrada, tot i que és manté el mateix desfasament.
Desfasament entre V1 i V2
Temps en que comença V2 menys el temps que comença V1= 0.1 –0.0044=0.0066 segons
Desfasament entre V2i V3
Temps en que comença V3 menys el temps que comença V2= 0.166 –0.01=0.0066 segons
Desfasament entre V3 i V1 del següent cicle
Temps en que comença V2 menys el temps que comença V1= 0.232 –0.0166=0.0066
Fig 5.10: senyal de les tensions de fase per a comprovar que estan desfasades 120º

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 57de 98
En aquesta altra gràfica observem que hi ha un desfasament entre tensió iintensitat, que és aproximadament de 72.34º o be 0.004 segons que vindria a ser elmateix, aquesta xifra la podem comparar amb la teòrica
=
R
Lartg
ϖϕ (5.4)
ϕ = desfasament (º)
ϖ = velocitat angular
L = inductància (H)
R = resistència (Ω)
3432.721
01.0·50·14159.3·2=
= artgϕ
Fig 5.11: representació de la tensió de fase i de línia i la intensitat
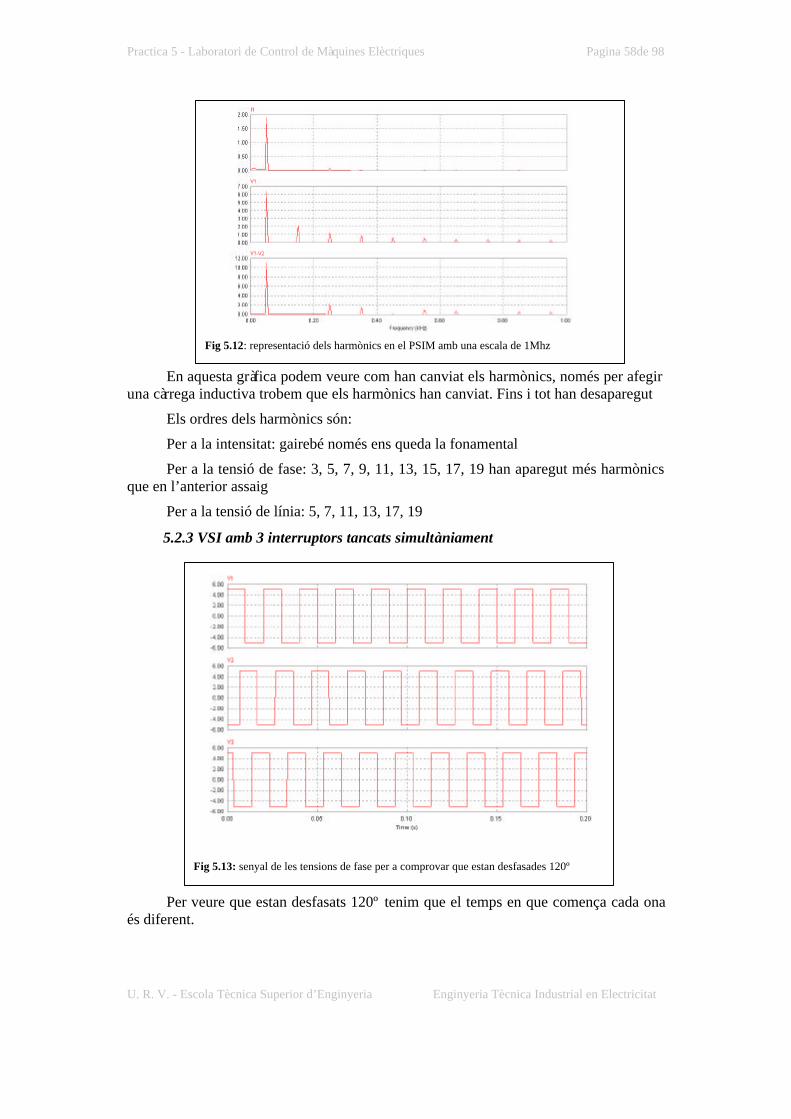
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 58de 98
En aquesta gràfica podem veure com han canviat els harmònics, només per afegiruna càrrega inductiva trobem que els harmònics han canviat. Fins i tot han desaparegut
Els ordres dels harmònics són:
Per a la intensitat: gairebé només ens queda la fonamental
Per a la tensió de fase: 3, 5, 7, 9, 11, 13, 15, 17, 19 han aparegut més harmònicsque en l’anterior assaig
Per a la tensió de línia: 5, 7, 11, 13, 17, 19
5.2.3 VSI amb 3 interruptors tancats simultàniament
Per veure que estan desfasats 120º tenim que el temps en que comença cada onaés diferent.
Fig 5.12: representació dels harmònics en el PSIM amb una escala de 1Mhz
Fig 5.13: senyal de les tensions de fase per a comprovar que estan desfasades 120º

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 59de 98
Desfasament entre V1 i V2
Temps en que comença V2 menys temps que comença V1= 0.0066 – 0=0.0066segons
Desfasament entre V2i V3
Temps en que comença V3 menys temps que comença V2= 0.0132 –0.0066=0.0066 segons
Desfasament entre V3 i V1 del següent cicle
Temps en que comença V2 menys temps que comença V1= 0.198 –0.0132=0.0066
En l’anàlisi dels tres tipus d’ona es pot veure clarament que la tensió i laintensitat estan en fase.
Fig 5.14: representació de la tensió de fase i de línia i la intensitat

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 60de 98
Respecte els harmònics tenim la següent figura
En la representació gràfica podem veure clarament on estan els harmònics, i comvan minvant a mesura que augmentem la freqüència.
Els ordres dels harmònics són:
Per a la intensitat: 5, 7, 11, 13, 17, 19
Per a la tensió de fase: 3, 5, 7, 9, 11, 13, 15, 17, 19 han aparegut més harmònicsque en l’anterior assaig
Per a la tensió de línia: 5, 7, 11, 13, 17, 19
Ara repetirem el mateix però afegint una càrrega inductiva de 10 mH.
Fig 5.15: representació dels harmònics en el PSIM amb una escala de 1Mhz
Fig 5.16: senyal de les tensions de fase per a comprovar que estan desfasades 120º

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 61de 98
En aquest cas no s’observa cap canvi en els desfasaments al respecte en l’apartatanterior.
En aquesta altra gràfica observem que hi ha un desfasament entre tensió iintensitat, que és aproximadament de 72.34º o be 0.004 segons que vindria a ser elmateix, aquesta xifra la podem comparar amb la teòrica
=
R
Lartg
ϖϕ (5.4)
ϕ = desfasament (º)
ϖ = velocitat angular
L = inductància (H)
R = resistència (Ω)
3432.721
01.0·50·14159.3·2=
= artgϕ
Fig 5.17: representació de la tensió de fase i de línia i la intensitat

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 62de 98
En aquesta gràfica podem veure com han canviat els harmònics, només per afegiruna càrrega inductiva trobem que els harmònics han canviat. Fins i tot han desaparegut
Els ordres dels harmònics son:
Per a la intensitat: gairebé només ens queda la fonamental
Per a la tensió de fase: 3, 5, 7, 9, 11, 13, 15, 17, 19 han aparegut més harmònicsque en l’anterior assaig
Per a la tensió de línia: 5, 7, 11, 13, 17, 19
Fig 5.18: representació dels harmònics en el PSIM amb una escala de 1Mhz
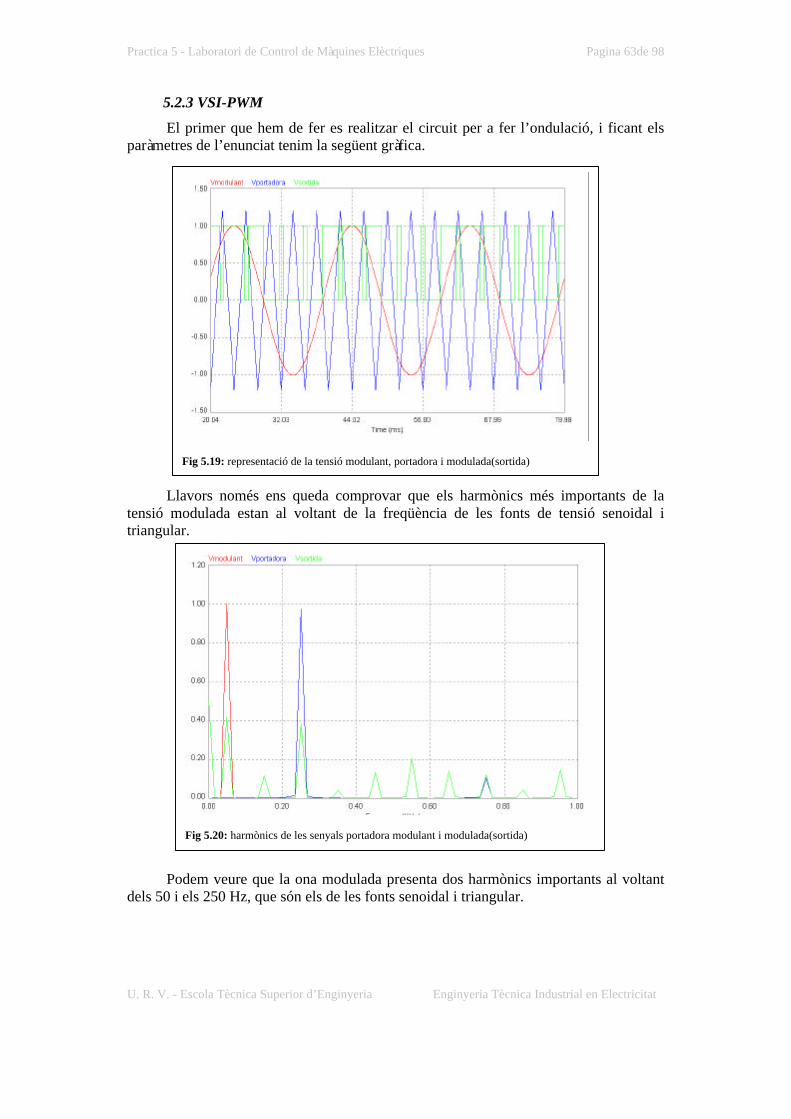
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 63de 98
5.2.3 VSI-PWM
El primer que hem de fer es realitzar el circuit per a fer l’ondulació, i ficant elsparàmetres de l’enunciat tenim la següent gràfica.
Llavors només ens queda comprovar que els harmònics més importants de latensió modulada estan al voltant de la freqüència de les fonts de tensió senoidal itriangular.
Podem veure que la ona modulada presenta dos harmònics importants al voltantdels 50 i els 250 Hz, que són els de les fonts senoidal i triangular.
Fig 5.20: harmònics de les senyals portadora modulant i modulada(sortida)
Fig 5.19: representació de la tensió modulant, portadora i modulada(sortida)

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 64de 98
Amb la freqüència de 50 Hz. Tenim les següents gràfiques.
Llavors només ens queda comprovar que els harmònics més importants de latensió modulada estan al voltant de la freqüència de les fonts de tensió senoidal itriangular.
Podem veure que la ona modulada presenta dos harmònics importants al voltantdels 50 i els 450 Hz, que són els de les fonts senoidal i triangular.
Fig 5.22: : harmònics de les senyals portadora modulant i modulada(sortida)
Fig 5.21: representació de la tensió modulant, portadora i modulada(sortida)

Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 65de 98
Per a veure que estan desfasats 120º tenim que el temps en que comença cada onaés diferent.
Desfasament entre V12 i V23
Temps en que comença V23 menys temps que comença V12= 0.0266 –0.02=0.0066 segons
Per tant estan desfasades 120º
En l’anàlisi dels tres tipus d’ona es pot veure clarament que la tensió i laintensitat de línia estan en fase,
Fig 5.23: senyal de dues tensions de línia per a comprovar que estan desfasades 120º
Fig 5.24: representació de la tensió de fase i de línia i la intensitat
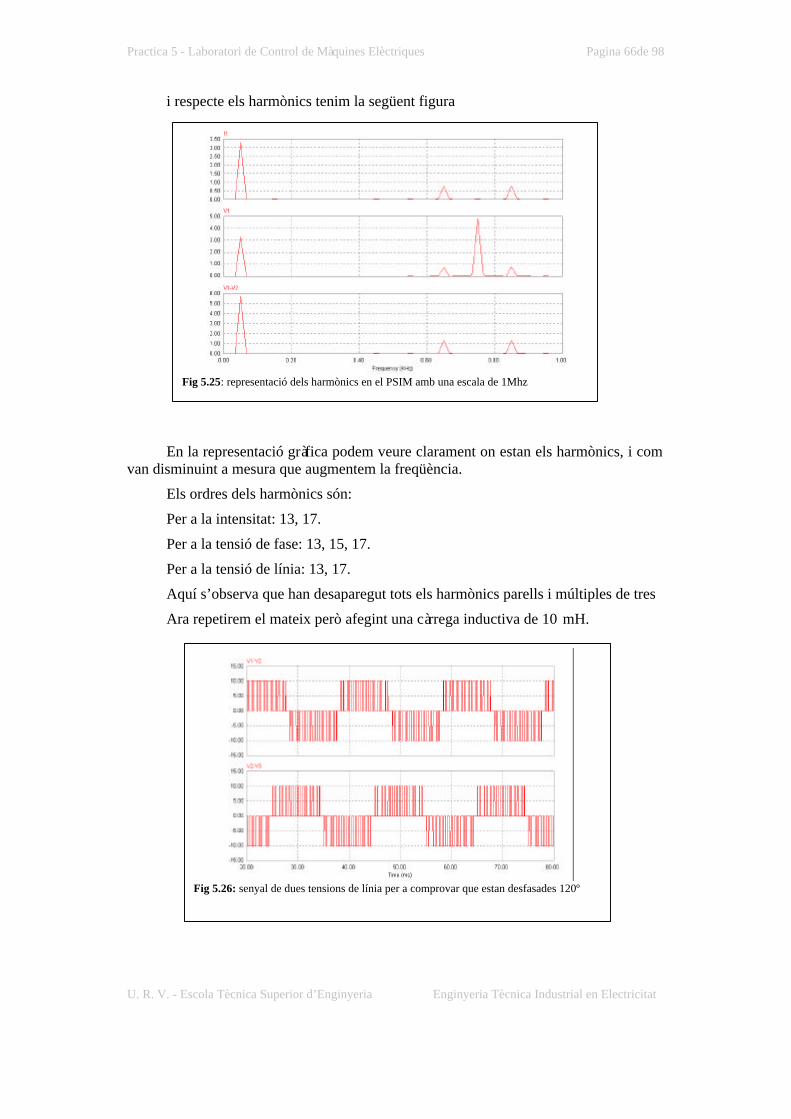
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 66de 98
i respecte els harmònics tenim la següent figura
En la representació gràfica podem veure clarament on estan els harmònics, i comvan disminuint a mesura que augmentem la freqüència.
Els ordres dels harmònics són:
Per a la intensitat: 13, 17.
Per a la tensió de fase: 13, 15, 17.
Per a la tensió de línia: 13, 17.
Aquí s’observa que han desaparegut tots els harmònics parells i múltiples de tres
Ara repetirem el mateix però afegint una càrrega inductiva de 10 mH.
Fig 5.25: representació dels harmònics en el PSIM amb una escala de 1Mhz
Fig 5.26: senyal de dues tensions de línia per a comprovar que estan desfasades 120º
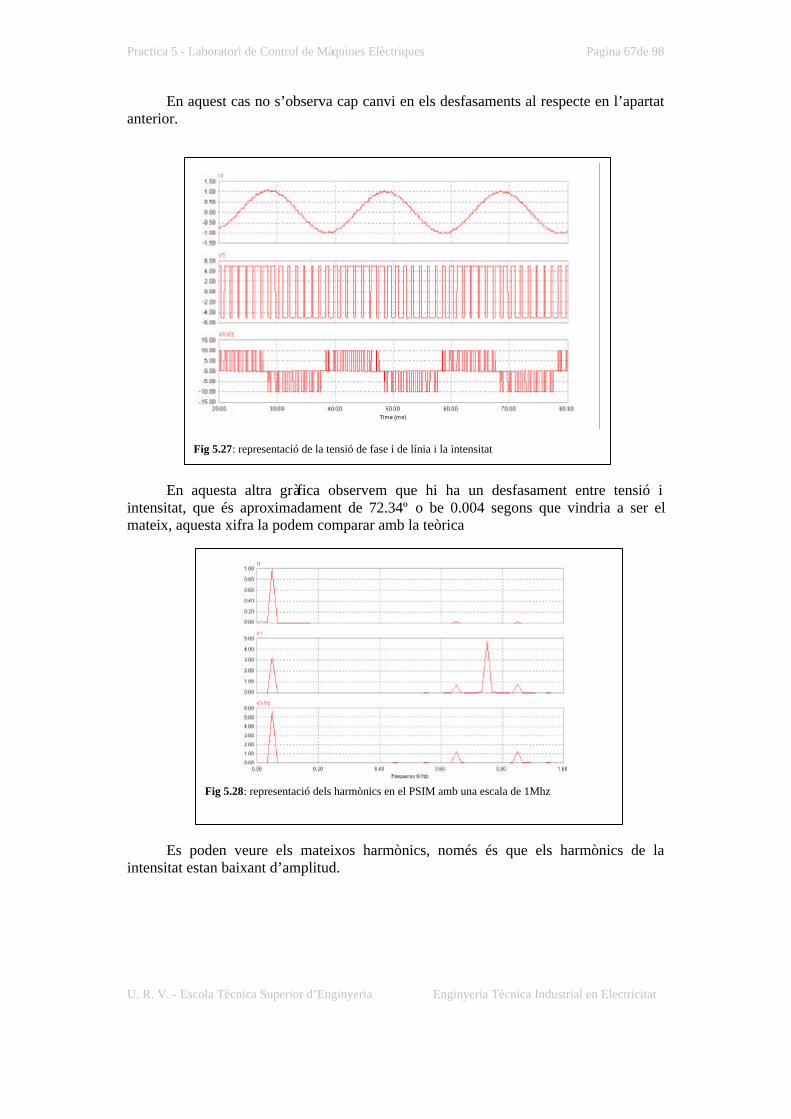
Practica 5 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 67de 98
En aquest cas no s’observa cap canvi en els desfasaments al respecte en l’apartatanterior.
En aquesta altra gràfica observem que hi ha un desfasament entre tensió iintensitat, que és aproximadament de 72.34º o be 0.004 segons que vindria a ser elmateix, aquesta xifra la podem comparar amb la teòrica
Es poden veure els mateixos harmònics, només és que els harmònics de laintensitat estan baixant d’amplitud.
Fig 5.28: representació dels harmònics en el PSIM amb una escala de 1Mhz
Fig 5.27: representació de la tensió de fase i de línia i la intensitat

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 68 de 98
6 PRÀCTICA - 6
6.1 FUNCIONAMENT DELS INVERSORS AMB UN MOTOR D’INDUCCIÓI UNA CARREGA MECÀNICA
6.1.1 OBJECTIU
Ja s’han vist el funcionament dels inversors d’ona a la pràctica anterior. Arapodrem saber com es comporten aquests inversors quan alimentem un motord’inducció, realitzar els esquemes pertinents amb el PSIM i analitzar els resultats per talde veure com afecta el seu comportament a la velocitat del motor.
6.1.2 ESQUEMA I VALORS INICIALS
En aquesta pràctica s’estudia com es comporta un motor d’inducció amb elsinversor VSI, utilitzarem dos tipus de esquemes:
a) VSI amb tres interruptors tancats simultàniament
b) VSI-PWM
6.1.2.1 Aparells a utilitzar en el esquema del VSI amb tres interruptorsconnectats simultàniament
Aparells de mesura:
3 Voltímetres
1 Amperímetre
Dispositius:
Font de tensió continua:
V= 150 V
Motor d’inducció trifàsic:
Rs= 0.2Ω Ls=0.001146H Rr=0.3ΩLr=0.001146H Lm=0.05507H p=4 Jm=0.3Kg·m2
Torque Flag=1 Master/Slave Flag=1
Càrrega mecànica (Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Tc=0N·m K1=0.2 K2=0 K3=0Jres=0.1 Kg·m2
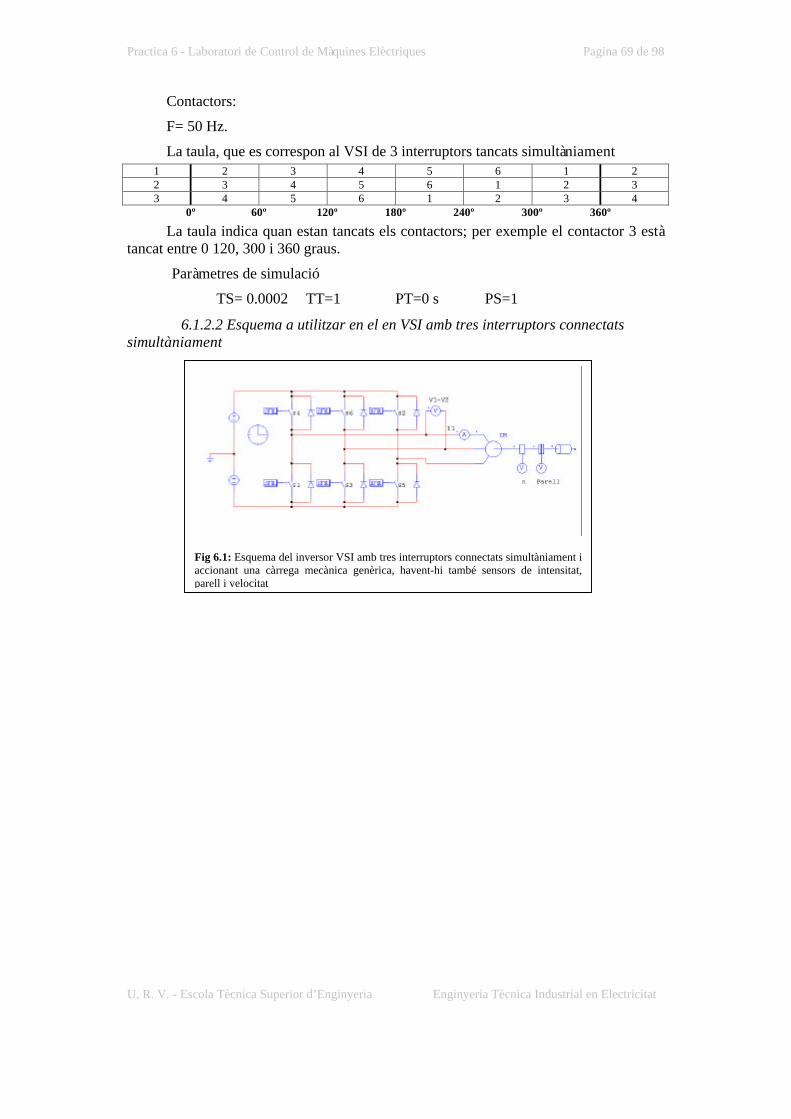
Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 69 de 98
Fig 6.1: Esquema del inversor VSI amb tres interruptors connectats simultàniament iaccionant una cà rrega mecànica genèrica, havent-hi també sensors de intensitat,parell i velocitat
Contactors:
F= 50 Hz.
La taula, que es correspon al VSI de 3 interruptors tancats simultàniament1 2 3 4 5 6 1 22 3 4 5 6 1 2 33 4 5 6 1 2 3 4
0º 60º 120º 180º 240º 300º 360º
La taula indica quan estan tancats els contactors; per exemple el contactor 3 estàtancat entre 0 120, 300 i 360 graus.
Paràmetres de simulació
TS= 0.0002 TT=1 PT=0 s PS=1
6.1.2.2 Esquema a utilitzar en el en VSI amb tres interruptors connectatssimultàniament
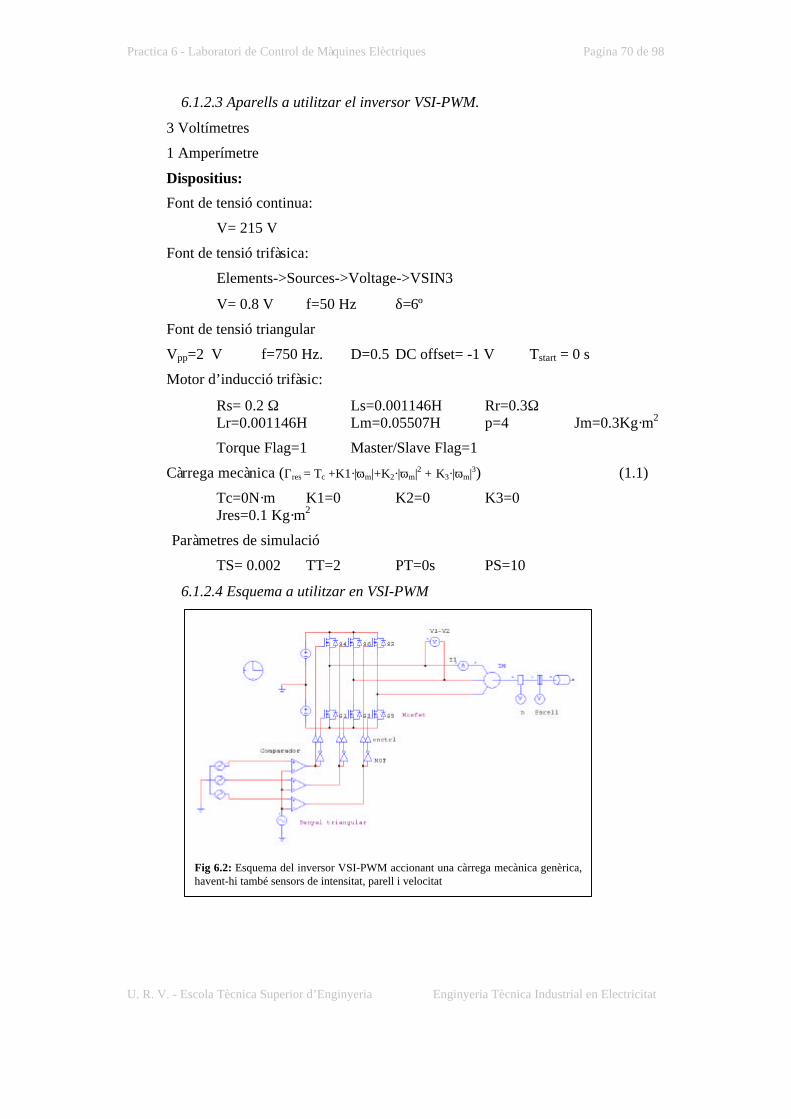
Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 70 de 98
Fig 6.2: Esquema del inversor VSI-PWM accionant una cà rrega mecànica genèrica,havent-hi també sensors de intensitat, parell i velocitat
6.1.2.3 Aparells a utilitzar el inversor VSI-PWM.
3 Voltímetres
1 Amperímetre
Dispositius:
Font de tensió continua:
V= 215 V
Font de tensió trifàsica:
Elements->Sources->Voltage->VSIN3
V= 0.8 V f=50 Hz δ=6º
Font de tensió triangular
Vpp=2 V f=750 Hz. D=0.5 DC offset= -1 V Tstart = 0 s
Motor d’inducció trifàsic:
Rs= 0.2 Ω Ls=0.001146H Rr=0.3ΩLr=0.001146H Lm=0.05507H p=4 Jm=0.3Kg·m2
Torque Flag=1 Master/Slave Flag=1
Càrrega mecànica (Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Tc=0N·m K1=0 K2=0 K3=0Jres=0.1 Kg·m2
Paràmetres de simulació
TS= 0.002 TT=2 PT=0s PS=10
6.1.2.4 Esquema a utilitzar en VSI-PWM

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 71 de 98
6.1.3 Tasques a realitzar per l’alumne
6.1.3.1 VSI amb tres interruptors connectats simultàniament
Realitzar el circuit de l’inversor VSI amb tres interruptors tancats simultàniamenti realitza les següents tasques
1) representació temporal de la tensió de línia a la sortida de l’inversor, veurequina és la tensió nominal(opció rms del SIMVIEW), i comprova que els harmònics vanminvant a mesura que augmenta el seu ordre.
2) determina quina és la corrent, el parell i la velocitat de règim permanent, aixícom els valors màxims de corrent i parell.
3) omple la següent taula i ensenya les gràfiques composades de les velocitats iparells motors
V(V) F(Hz) nrp(min-1) Irp Γrp Imax Γmax n/nn
75 25112.5 37.5150 50150 60
Per definir aquesta taula s’han de tenir en compte dos criteris:
a) si la freqüència és menor que la nominal és manté una relació constanttensió/freqüència
b) si la freqüència és major que la nominal la tensió és manté constant.
6.1.3.2 VSI-PWM
Realitza el circuit del inversor VSI-PWM i realitza les següents tasques
1) repeteix els punts 1 i 2 del apartat anterior amb el esquema del VSI-PWM
2) omple la següent taula i ensenya les gràfiques composades de les velocitats iparells motors
V(V) Fmodulant(Hz) Fportadora(Hz) ϕ(º) nrp(min-1) Irp Γrp n/nn
75 15 225 1.8112.5 25 375 3215 50 750 6215 60 900 7.2
Per definir aquesta taula s’han de tenir en compte tres criteris:
a) si la freqüència és menor que la nominal és manté una relació constanttensió/freqüència
b) si la freqüència és major que la nominal la tensió és manté constant.
c) l’índex de freqüència és constant
6.1.3.3 Qüestions
a) Observant les gràfiques, quin dels dos mètodes injecta més harmònics a laxarxa i al motor?
b) Que implica que hi hagin menys harmònics al motor?

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 72de 98
6.2 INFORME DEL FUNCIONAMENT DELS INVERSORS AMB UNMOTOR D’INDUCCIÓ I UNA CÀRREGA MECÀNICA
6.2.1 Introducció
En la pràctica anterior, s’esmentava que avui en dia quan necessitem unavelocitat controlada i diferent per a un procés ens agafem als motors d’inducció amb unvariador de freqüència.
El variador de freqüènciavaria la velocitat del motor, envelocitats per sota de la velocitatnominal es varia la tensió i lafreqüència en la mateixaproporció per a mantenir el fluxconstant; però en canvi per avelocitats superiors el que fem esaugmentar la freqüènciamantenint constant la tensiónominal, debilitant-se així el fluxde la màquina. Encara que esdebiliti el flux,com que la corba parell velocitat és bastant rígida (figura 6.3) no hihaurà massa diferència entre la velocitat que te el flux constant i la que no.
6.2.2 VSI amb tres interruptors tancats simultàniament
Ara veurem la representació temporal de la tensió de línia a la sortida:
La tensió de línia te un valor eficaç de 246.5 Volts
fig 6.3: Corba parell velocitat per a diferents freqüències
Fig 6.4: representació de la tensió de linea

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 73de 98
I respecte els harmònics podem veure com es va atenuant:
En la següent figura podem observar el parell tensió i velocitats del motor
En la gràfica podem observar els resultats màxims que ens dóna.
Imax=264.13 A
Γmax= 401 N·m
Fig 6.5: representació dels harmònics de la tensió de línia, on es pot veure que es vanatenuant a mesura que el seu ordre es més gran.
Fig 6.6: representació dels harmònics de la tensió de línia, on es pot veure que es vanatenuant a mesura que el seu ordre es més gran.

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 74de 98
Agafant una nombre sencer de períodes desprès de 0.8 segons és quan el motor jaha arribat la velocitat de règim permanent.
Trobem els següents valors:
nrp=1456 min-1
Γrp=31.43 N·m
Irp=20.2 AV(V) f(Hz) nrp(min-1) Irp ΓΓrp Imax ΓΓmax n/nn
75 25 728 14.28 16.4 177 298 .5112.5 37.5 1092.6 17 22.9 229 379 0.75150 50 1456 20.2 31.43 264.13 401 1150 60 1720 23.45 40.2 236.2 228.8 1.18
Fig 6.7: Representació de les velocitats amb el diferent tipus de freqüències roig 25 Hz.Blau 37.5 Hz. Verd 50 Hz. Violeta 60 Hz.
Fig 6.8: Representació dels parells amb el diferent tipus de freqüències roig 25 Hz. Blau37.5 Hz. Verd 50 Hz. Violeta 60 Hz.

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 75de 98
6.2.3 VSI-PWM
Ara veurem la representació temporal de la tensió de línia a la sortida:
La tensió de línia te un valor eficaç de 243.5 Volts
I respecte els harmònics en aquest cas es veu clarament que no s’atenuen, sinóque te un ordre proper al de modulació:
Fig 6.9: representació de la tensió de linea
Fig 6.10: representació dels harmònics de la tensió de línia, on es pot veure el seu ordre.
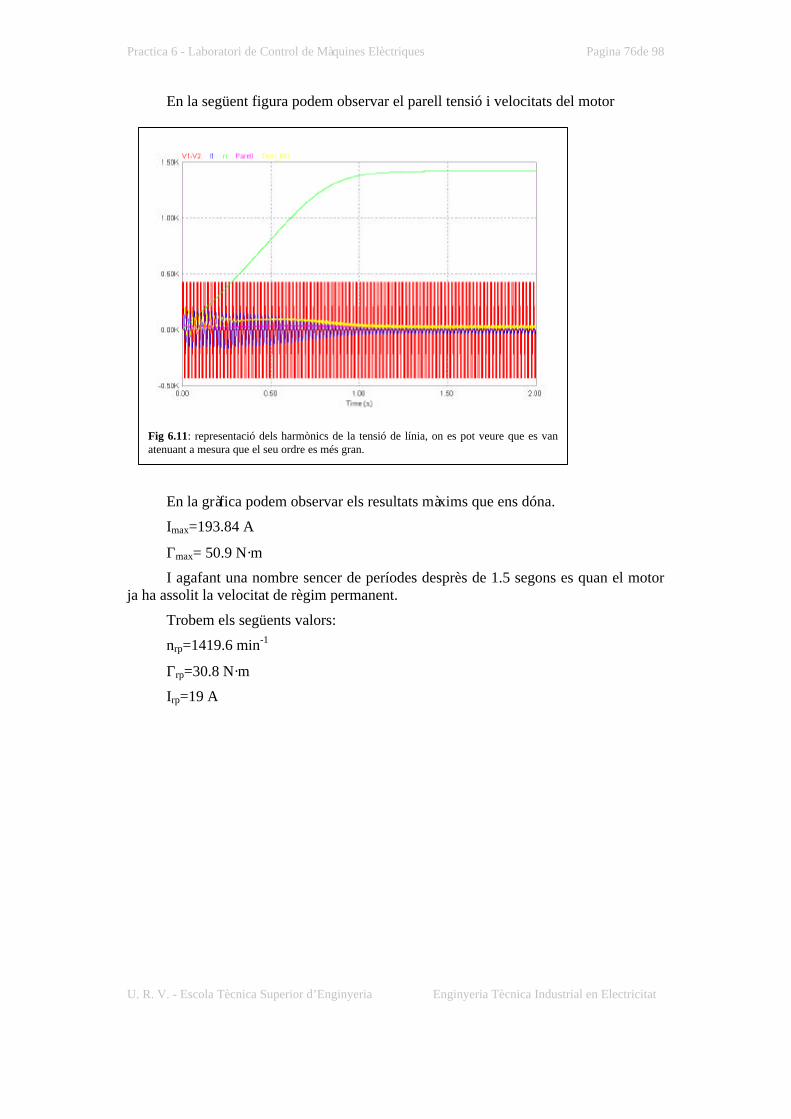
Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 76de 98
En la següent figura podem observar el parell tensió i velocitats del motor
En la gràfica podem observar els resultats màxims que ens dóna.
Imax=193.84 A
Γmax= 50.9 N·m
I agafant una nombre sencer de períodes desprès de 1.5 segons es quan el motorja ha assolit la velocitat de règim permanent.
Trobem els següents valors:
nrp=1419.6 min-1
Γrp=30.8 N·m
Irp=19 A
Fig 6.11: representació dels harmònics de la tensió de línia, on es pot veure que es vanatenuant a mesura que el seu ordre es més gran.

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 77de 98
V(V) Fmodulant(Hz) Fportadora(Hz) ϕ(º) nrp(min-1) Irp Γrp n/nn
75 15 225 1.8 432 11.2 13.8 0.3112.5 25 375 3 713 11.4 15 0.5215 50 750 6 1419.6 19 30.8 1215 60 900 7.2 1650 27.6 36.9 1.16
Fig 6.12: Representació de les velocitats amb el diferent tipus de freqüències roig 15 Hz.Blau 25 Hz. Verd 50 Hz. Violeta 60 Hz.
Fig 6.8: Representació dels parells amb el diferent tipus de freqüències roig 15 Hz. Blau25 Hz. Verd 50 Hz. Violeta 60 Hz.

Practica 6 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 78de 98
6.2.4 Conclusions generals
a) Observant les gràfiques quin dels dos mètodes injecta més harmònics a laxarxa, i al motor?
El inversor que injecta menys harmònics a la xarxa és el VSI-PWM, encara qued’una major amplitud, i el que més el VSI de 3 interruptors tancats simultàniament.
b) Què implica que hi hagin menys harmònics al motor?
Ens ajuda a que el seu comportament sigui més constant.

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 79 de 98
7 PRÀCTICA - 7
7.1 ARRANC I FRENAT D’UN MOTOR DE CORRENT CONTINUA
7.1.1 OBJECTIU
Vistos ja els motors de corrent alterna ara analitzarem els motors de correntcontínua i es veurà com afecta el parell a la posta marxa al motor de corrent contínua enrègim transitori; amb diferents connexions, derivació i sèrie, veurem com afecta la postaen marxa amb una resistència al induï t.
El frenat d’un motor amb connexió derivació fent servir les dos formes de frenatelèctric, el frenat regeneratiu i el frenat a contra corrent.
7.1.2 ESQUEMA I VALORS INICIALS
7.1.2.1 Posta en marxa del motor de corrent contínua
El motor de corrent contínua presenta tres tipus de connexió principals, Connexióderivació, connexió sèrie, connexió compound, aquest últim cas no serà possibleanalitzar-lo perquè el model de motor de corrent continua del PSIM no disposa de unabobina inductora dividida en dos, per tant no es poden fer dues connexions a la vegada.
Les connexions que veurem seran la connexió derivació i la sèrie,
a) Connexió derivació
En el cas de la connexió derivació es veurà la posta en marxa amb una càrregaconstant, aquesta connexió provoca que el motor es comporti d’una manera molt similaral motor d’inducció, també veurem l’efecte que te afegir una resistència addicional al’induï t en el cas del parell constant.
b) Connexió Sèrie
El motor de corrent contínua amb connexió sèrie, està indicat per a postes emmarxa de un gran parell resistent, i no s’utilitza per a funcionar en règim permanent, peraixò s’analitzarà aquesta connexió amb dos càrregues diferents, encara que totes duesconstants.
7.1.2.1 Aparells a utilitzar en la connexió derivació i sèrie
Aparells de mesura:
1 Amperímetre
2 Voltímetres

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 80 de 98
Fig 7.1: Esquema de posta en marxa directe d’un motor de corrent contínuaconnectat en derivació accionant una càrrega mecànica genèrica, havent-hi tambésensors de intensitat, parell i velocitat.
Fig 7.2: Esquema de la posta en marxa directe d’un motor de corrent continuaconnectat en sèrie accionant una càrrega mecànica genèrica, havent-hi també sensorsde intensitat, parell i velocitat.
Dispositius:
Font de tensió continua:
V= 150 V
Motor de corrent continu(serà el mateix en tots els apartats):
Ra= 0.5Ω La=0.01H Rf=75ΩLf=0.02H Jm=0.1Kg·m2 Vt=150V Ia=10 A
n=1200 min-1 If=1.6 A
Torque Flag=1 Master/Slave Flag=1
7.1.2.2 Esquema a utilitzar en la connexió derivació
7.1.2.3 Esquema a utilitzar en la connexió sèrie

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 81 de 98
Fig 7.3: Esquema del frenat a rotor lliure en un motor de corrent continua enconnexió derivació, també te sensors de intensitat, parell i velocitat.
Fig 7.4: Esquema del frenat regeneratiu en un motor de corrent continua enconnexió derivació, també te sensors de intensitat, parell i velocitat.
7.1.2.4 Frenat del motor de corrent contínua
En el frenat del motor de corrent contínua tenim diferents casos analitzar, el derotor lliure, el frenat a contracorrent i el regeneratiu,
7.1.2.5 Esquema a utilitzar en el frenat a rotor lliure
7.1.2.6 Esquema a utilitzar en el frenat regeneratiu
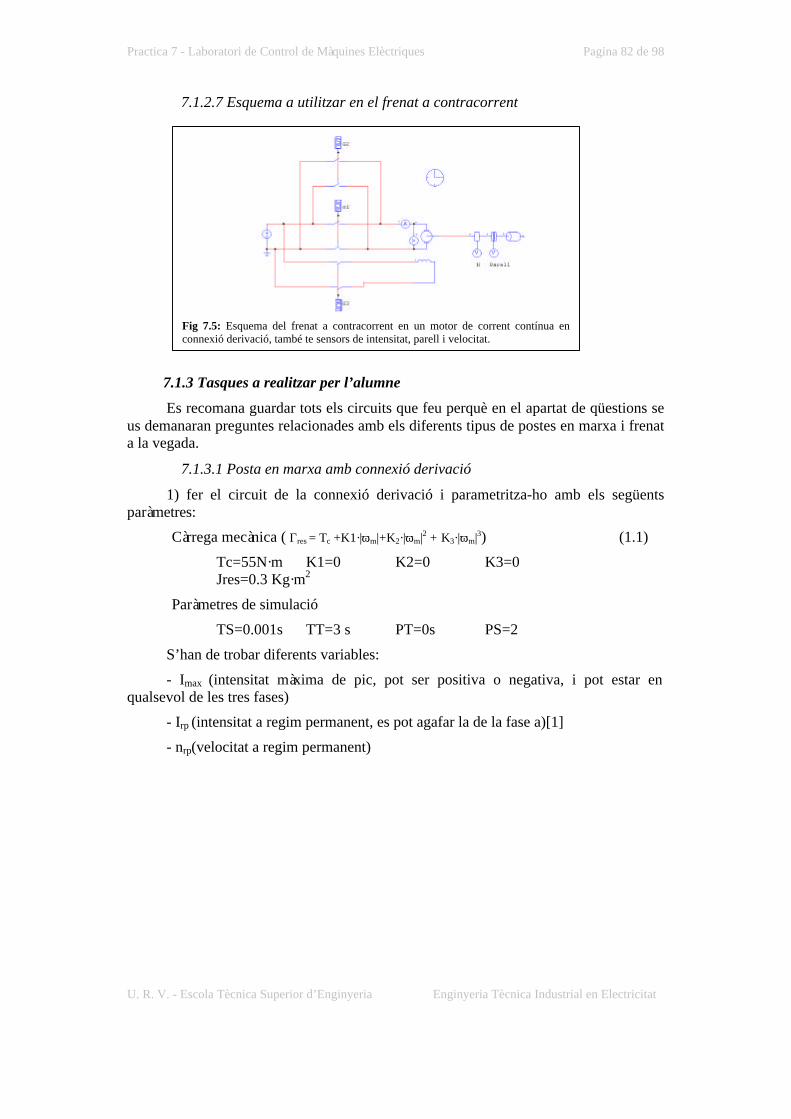
Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 82 de 98
Fig 7.5: Esquema del frenat a contracorrent en un motor de corrent contínua enconnexió derivació, també te sensors de intensitat, parell i velocitat.
7.1.2.7 Esquema a utilitzar en el frenat a contracorrent
7.1.3 Tasques a realitzar per l’alumne
Es recomana guardar tots els circuits que feu perquè en el apartat de qüestions seus demanaran preguntes relacionades amb els diferents tipus de postes en marxa i frenata la vegada.
7.1.3.1 Posta en marxa amb connexió derivació
1) fer el circuit de la connexió derivació i parametritza-ho amb els següentsparàmetres:
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Tc=55N·m K1=0 K2=0 K3=0Jres=0.3 Kg·m2
Paràmetres de simulació
TS=0.001s TT=3 s PT=0s PS=2
S’han de trobar diferents variables:
- Imax (intensitat màxima de pic, pot ser positiva o negativa, i pot estar enqualsevol de les tres fases)
- Irp (intensitat a regim permanent, es pot agafar la de la fase a)[1]
- nrp(velocitat a regim permanent)

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 83 de 98
Fig 7.6: Esquema del arranc d’un motor de corrent continua connectat enderivació i amb dues resistències al induït per tal de atenuar el parell dearranc accionant una càrrega mecànica genèrica, havent-hi també sensors deintensitat, parell i velocitat.
- Γmotor (parell que dona el motor en regim permanent)
- Γresistent (parell resistent en regim permanent)
- Γmotor max(parell de pic que dona el motor al arranc)
- Γresistent max(parell resistent màxim que ofereix la carrega mecànica al arranc)
- T (temps que tarda a assolir la nn mes o menys a ull)
Ara afegeix al circuit dos resistències de 0.5Ω com es veu en la següent figura
I parametritza els contactors
Contactor (G1)
Frequency = 0 Hz nº of points = 2 Switching Points = 0.65 3 s
Contactor (G2)
Frequency = 0 Hz nº of points = 2 Switching Points = 0.3 3s
Un cop realitzat s’han de buscar les següents variables.
- Imax, Irp,nrp, Γmotor,Γresistent, Γmotor max, Γresistent max, T.
Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 84 de 98
7.1.3.2 Posta en marxa amb connexió sèrie
En aquest apartat es tracta de veure que la connexió sèrie és un mètode ideal per aposar en marxa el motor amb grans moment d’inèrcia o grans parells de posta en marxa,seria el cas dels trens.
Prova-ho amb les següents càrregues:
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Tc=55N·m K1=0 K2=0 K3=0Jres=0.3 Kg·m2
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Tc=500N·m K1=0 K2=0 K3=0Jres=0.3 Kg·m2
I busca en tots dos casos els paràmetres:
- Imax, Irp,nrp, Γmotor,Γresistent, Γmotor max, Γresistent max, T.
7.1.3.3 Frenat a rotor lliure
Paràmetres de simulació
TS=0.001s TT=5 s PT=0s PS=2
Els paràmetres de simulació i la càrrega mecànica ens serviran també per alsaltres tipus de frenat
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Tc=5.965N·m K1=0 K2=0.0017 K3=0Jres=0.3 Kg·m2
En el PSIM tenim el problema de la desconnexió, i es que no podem fer ladesconnexió a la vegada de l’inductor i l’induï t com es faria en un cas real, perquè al sermodels teòrics ens crea una f.e.m. transitòria que ens atura molt ràpidament el motor, ésper això que haurem de desconnectar un instant abans l’inductor que l’induï t.
Contactor (G1)
Frequency = 0 Hz nº of points = 2 Switching Points = 0 0.5 s
Contactor (G2)
Frequency = 0 Hz nº of points = 2 Switching Points = 0 0.49999 s
- Troba quan tarda el motor a aturar-se.
7.1.3.4 Frenat regeneratiu
Contactor (G1)
Frequency = 0 Hz nº of points = 2 Switching Points = 0 0.5 s
Contactor (G2)
Frequency = 0 Hz nº of points = 2 Switching Points = 0.51 5 s

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 85 de 98
S’han de trobar les següents variables primer amb una resistència de 5 Ω idesprès amb una de 10 Ω:
- T= temps que tarda en frenar el motor.
- Imax=(intensitat màxima de pic en el instant en que el motor deixa el seu estat derepòs)
- Iarranc = intensitat eficaç del motor durant la posta en marxa, entre 0 i 0.3 s
- Icontracorrent= intensitat eficaç del motor durant el frenat(a la resistència) 0.5 i 2.4 sa la resistència de 5Ω i 0.5 i 3 s a la de 10Ω.
- Γmotor max(parell de pic que dona el motor en la posta en marxa, instant en que elmotor deixa el seu estat de repòs)
- Γresistent max(parell resistent màxim que ofereix la càrrega mecànica en la posta enmarxa)
- Γ’motor max(parell de pic que dona el motor al frenat, instant en que el motor deixael seu estat de repòs)
- Γ’resistent max(parell resistent màxim que ofereix la càrrega mecànica al frenat)
7.1.3.5 Frenat a contracorrent
Contactor (G1)
Frequency = 0 Hz nº of points = 2 Switching Points = 0 0.5 s
Contactor (G2)
Frequency = 0 Hz nº of points = 2 Switching Points = 0.51 0.585s
Contactor (G2)
Frequency = 0 Hz nº of points = 2 Switching Points = 0 0.7s
amb els paràmetres dels contactors:
Troba les mateixes variables del apartat anterior:
Per a la Iarranc agafa el temps entre 0 i 0.3 s
Per a la Icontracorrent= agafa el temps entre 0.5 i 0.6 s
7.1.3.6 Qüestions
Realitzar les gràfiques de velocitat, intensitat i parell motor dels les postes enmarxa conjuntament, i a part els dels frenats (opció merge, si teniu algun dubte podeuconsultar el manual del PSIM), també us podeu basar en els resultats anteriors de lespràctiques.
a) Quin dels dos frenats és més ràpid, en tots el casos?
b) Quan és aconsellable el frenat a contra corrent?
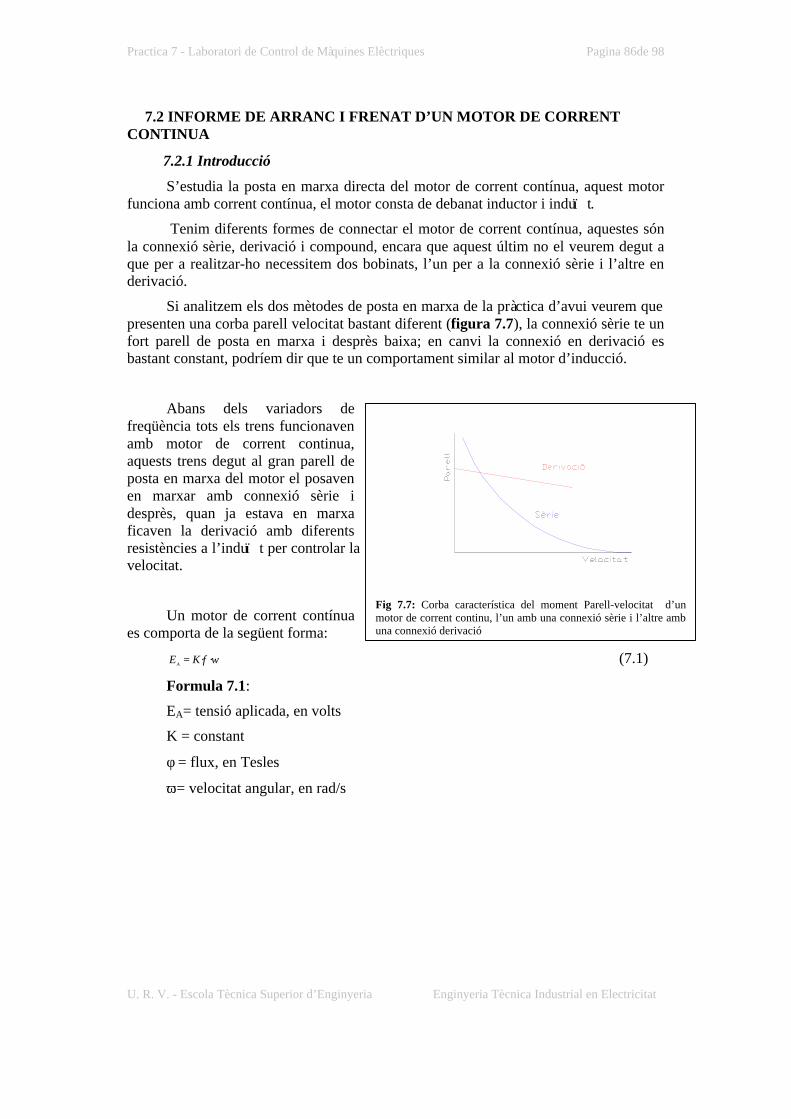
Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 86de 98
7.2 INFORME DE ARRANC I FRENAT D’UN MOTOR DE CORRENTCONTINUA
7.2.1 Introducció
S’estudia la posta en marxa directa del motor de corrent contínua, aquest motorfunciona amb corrent contínua, el motor consta de debanat inductor i induï t.
Tenim diferents formes de connectar el motor de corrent contínua, aquestes sónla connexió sèrie, derivació i compound, encara que aquest últim no el veurem degut aque per a realitzar-ho necessitem dos bobinats, l’un per a la connexió sèrie i l’altre enderivació.
Si analitzem els dos mètodes de posta en marxa de la pràctica d’avui veurem quepresenten una corba parell velocitat bastant diferent (figura 7.7), la connexió sèrie te unfort parell de posta en marxa i desprès baixa; en canvi la connexió en derivació esbastant constant, podríem dir que te un comportament similar al motor d’inducció.
Abans dels variadors defreqüència tots els trens funcionavenamb motor de corrent continua,aquests trens degut al gran parell deposta en marxa del motor el posavenen marxar amb connexió sèrie idesprès, quan ja estava en marxaficaven la derivació amb diferentsresistències a l’induï t per controlar lavelocitat.
Un motor de corrent contínuaes comporta de la següent forma:
ωφ··KEA = (7.1)
Formula 7.1:
EA= tensió aplicada, en volts
K = constant
φ = flux, en Tesles
ω= velocitat angular, en rad/s
Fig 7.7: Corba característica del moment Parell-velocitat d’unmotor de corrent continu, l’un amb una connexió sèrie i l’altre ambuna connexió derivació

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 87de 98
En el segon apartat de la pràctica s’analitza la forma de parar d’un motor decorrent contínua.
D’una banda, tenim el frenat a contracorrent que es realitza canviant la tensió; enel nostre cas ho farem canviant-lo al induï t. S’ha de canviar de polaritat a un del doselements, ja que si ho féssim als dos continuaria girant en el mateix sentit, aquest fet esfàcilment comprovable aï llant la variable velocitat, d’aquesta manera es mostra:
Variable depenent de la tensió de l’induï t
φω
·K
EA= .
Variable depenent de la tensió de l’inductor(el sentit del flux)
Posem el cas que tot es positiu, si canviem el flux seria negatiu i la tensió també,de manera que negatiu entre negatiu dóna positiu un altre cop i seguiria girant el motoren la mateixa direcció. Però en canvi, si només ho fem un dels dos el resultat és negatiu,i el motor ha de girar en sentit contrari.
El frenat regeneatiu és un mètode diferent, funciona substituint la connexiód’alimentació a l’induï t per una resistència, de forma que el que era un motor de correntcontinua passa a ser una dinamo, i es crea una parell en sentit contrari al de gir, a més amés aquest parell es fa cada cop inferior, ja que:
Ei↓ → Ii↓ → Γi↓ → ω↓ → E↓ ...
La velocitat en que frenarà el motor es pot canviar canviant resistència que actuacom a càrrega.
7.2.2 Arranc amb connexió derivació
a) Arranc del motor en derivació directeParàmetre Abreviació Resultat Unitat
intensitat màxima de pic Imax 238.4 Aintensitat a regim permanent Irp 40.1 Avelocitat a regim permanent nrp 866 Min-1
parell que dona el motor enregim permanent
Γmotor 55 N.m
parell resistent en regimpermanent
Γresistent 55 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 341 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 269.5 N.m
temps que tarda a assolir la nn T 0.5 s

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 88de 98
b) Posta en marxa en un motor en connexió derivació mitjançant dues resistènciesde 0.5
Paràmetre Abreviació Resultat Unitatintensitat màxima de pic Imax 97.8 A
intensitat a règim permanent Irp 40.1 Avelocitat a règim permanent nrp 866.8 Min-1
parell que dóna el motor enrègim permanent
Γmotor 55 N.m
parell resistent en règimpermanent
Γresistent 55 N.m
parell de pic que dóna el motoren la posta en marxa
Γmotor max 138.3 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 117.4 N.m
temps que tarda a assolir la nn T 1.2 s
7.2.3 Posta en marxa amb connexió sèrie
a) amb un parell de 55 N·mParàmetre Abreviació Resultat Unitat
intensitat màxima de pic Imax 48.9 Aintensitat a règim permanent Irp 21.8 Avelocitat a règim permanent nrp 517.28 Min-1
parell que dóna el motor enrègim permanent
Γmotor 55 N.m
parell resistent en règimpermanent
Γresistent 55 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 276.9 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 221.4 N.m
temps que tarda a assolir la nn T 0.5 s
b) amb un parell de 500 N·mParàmetre Abreviació Resultat Unitat
intensitat màxima de pic Imax 77.24 Aintensitat a règim permanent Irp 65.8 Avelocitat a règim permanent nrp 137.3 Min-1
parell que dóna el motor enrègim permanent
Γmotor 500 N.m
parell resistent en règimpermanent
Γresistent 500 N.m
parell de pic que dona el motoren la posta en marxa
Γmotor max 688.4 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 641.2 N.m
temps que tarda a assolir la nn T 1.5 s

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 89de 98
7.2.4 Frenat a rotor lliure
El temps d’aturada és 4.5-.5 =4 segons
7.2.5 Frenat regeneratiu
a) amb una resistència de 5 ΩParàmetre Abreviació Resultat Unitat
temps que tarda el motor aaturar-se
T 2.24-0.5=1.74 S
intensitat màxima de pic Imax 230.3 Aintensitat eficaç durant la posta
en marxaIarranc 125.16 Min-1
intensitat eficaç durant el frenat Icontracorrent 10.7 N.mparell de pic que dóna el motor
en la posta en marxaΓmotor max 329.4 N.m
parell resistent màxim queofereix la càrrega mecànica en
la posta en marxa
Γresistent max 248.8 N.m
parell de pic que dóna el motoral frenat
Γ’motor max 36.5 N.m
parell resistent màxim queofereix la càrrega mecànica al
frenat
Γ’resistent max 21.94 N.m
b) amb una resistència de 10 ΩParàmetre Abreviació Resultat Unitat
temps que tarda el motor aaturar-se
T 3-0.5=2.5 s
intensitat màxima de pic Imax 230.4 Aintensitat eficaç durant la posta
en marxaIarranc 125.16 Min-1
intensitat eficaç durant el frenat Icontracorrent 5.8 N.mparell de pic que dona el motor
en la posta en marxaΓmotor max 329.4 N.m
parell resistent màxim queofereix la carrega mecànica en
la posta en marxa
Γresistent max 248.8 N.m
parell de pic que dóna el motoral frenat
Γ’motor max 19.3 N.m
parell resistent màxim queofereix la carrega mecànica al
frenat
Γ’resistent max 8.9 N.m
7.2.6 Frenat a contracorrentParàmetre Abreviació Resultat Unitat
temps que tarda el motor aaturar-se
T 0.6-0.5=0.1 s
intensitat màxima de pic Imax 230.4 Aintensitat eficaç durant la posta
en marxaIarranc 125.16 Min-1
intensitat eficaç durant el frenat Icontracorrent 327.3 N.mparell de pic que dóna el motor
en la posta en marxaΓmotor max 329.4 N.m
parell resistent màxim queofereix la càrrega mecànica en
la posta en marxa
Γresistent max 248.8 N.m
parell de pic que dóna el motoral frenat
Γ’motor max 632.4 N.m
parell resistent màxim queofereix la càrrega mecànica al
frenat
Γ’resistent max 471.8 N.m
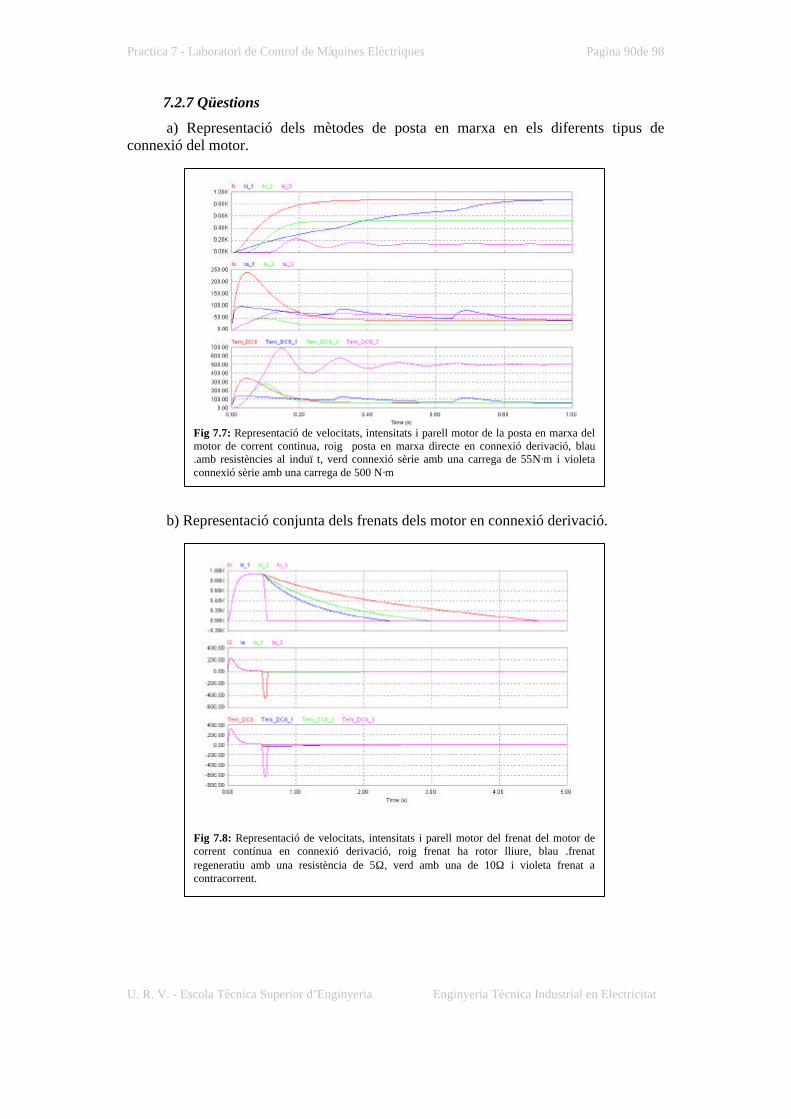
Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 90de 98
Fig 7.7: Representació de velocitats, intensitats i parell motor de la posta en marxa delmotor de corrent continua, roig posta en marxa directe en connexió derivació, blau.amb resistències al induït, verd connexió sèrie amb una carrega de 55 N·m i violetaconnexió sèrie amb una carrega de 500 N·m
Fig 7.8: Representació de velocitats, intensitats i parell motor del frenat del motor decorrent contínua en connexió derivació, roig frenat ha rotor lliure, blau .frenatregeneratiu amb una resistència de 5Ω, verd amb una de 10Ω i violeta frenat acontracorrent.
7.2.7 Qüestions
a) Representació dels mètodes de posta en marxa en els diferents tipus deconnexió del motor.
b) Representació conjunta dels frenats dels motor en connexió derivació.

Practica 7 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 91de 98
a) Quin dels dos frenats és més ràpid, en tots el casos?
El frenat més ràpid és el de contracorrent i sempre en tots els casos ho serà; jaque per petita que sigui la resistència del frenat regeneratiu no serà més gran que el creatinicialment
b) Quan es aconsellable el frenat a contra corrent?
Només en casos d’emergència quan necessitem frenar sobtadament la màquina, sino és més aconsellable qualsevol altre mètode de frenat; perquè es pot malmetre elaï llant del col·lector de delgues.

Practica 8 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 92 de 98
Fig 8.1: Esquema del circuit chopper reductor alimentant una càrrega RL
8 PRÀCTICA - 8
8.1 CONTROL DE LA VELOCITAT DE UN MOTOR DE CORRENTCONTINUA MITJANÇANT UN CONVERTIDOR CONTINUA - CONTINUA
8.1.1 OBJECTIU
Analitzar el comportament de un convertidor continua-continua (en el nostre casreductor) amb diferents càrregues i un motor de corrent continua.
8.1.2 ESQUEMA I VALORS INICIALS
8.1.2.1 Aparells a utilitzar en el chopper amb una càrrega elèctrica
Aparells de mesura:
1 Amperímetre
1 Voltímetre
Dispositius:
La font de tensió continua serà de 500V
8.1.2.2 Esquema a utilitzar en el chopper amb una càrrega elèctrica
8.1.2.3 Aparells a utilitzar en el chopper amb un motor de corrent continua
Les fonts de tensió continua seran de 150V
Càrrega mecànica ( Γres = Tc +K1·|ωm|+K2·|ωm|2 + K3·|ωm|3) (1.1)
Tc=55N·m K1=0 K2=0 K3=0Jres=0.3 Kg·m2
Motor de corrent continu:
Ra= 0.5Ω La=0.01H Rf=75ΩLf=0.02H Jm=0.1Kg·m2 Vt=150V Ia=10 A
n=1200 min-1 If=1.6 A
Torque Flag=1 Master/Slave Flag=1
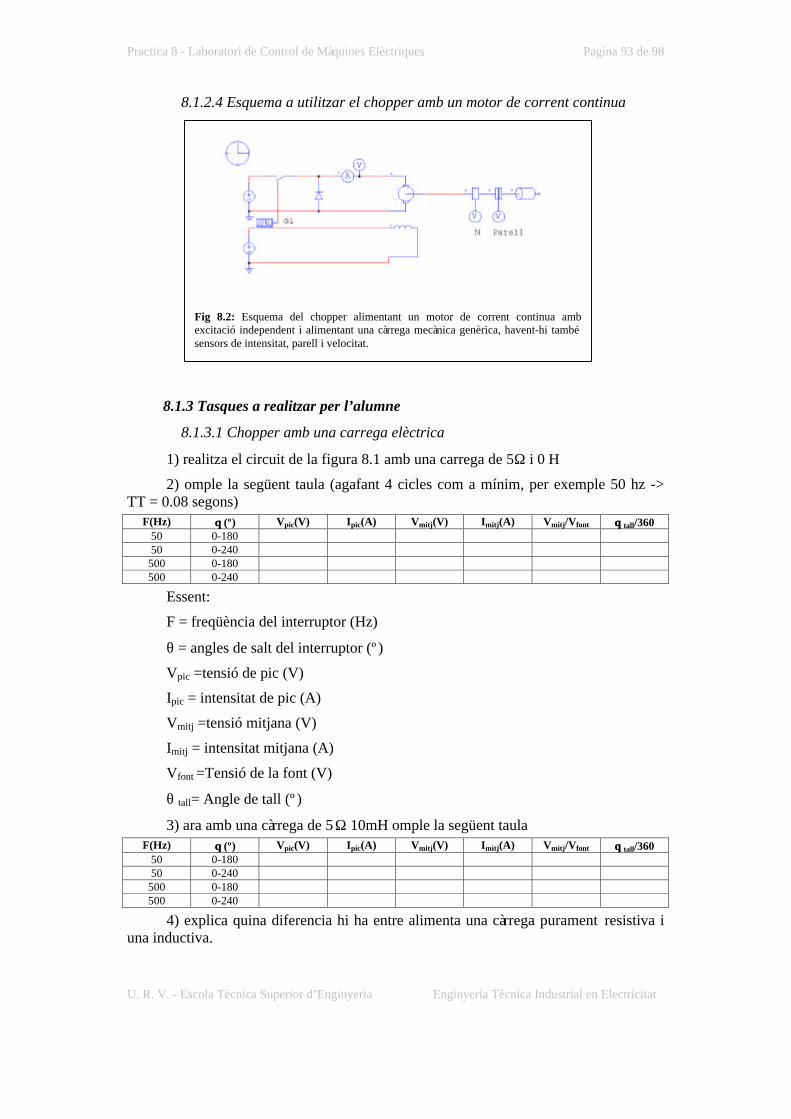
Practica 8 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 93 de 98
Fig 8.2: Esquema del chopper alimentant un motor de corrent continua ambexcitació independent i alimentant una càrrega mecànica genèrica, havent-hi tambésensors de intensitat, parell i velocitat.
8.1.2.4 Esquema a utilitzar el chopper amb un motor de corrent continua
8.1.3 Tasques a realitzar per l’alumne
8.1.3.1 Chopper amb una carrega elèctrica
1) realitza el circuit de la figura 8.1 amb una carrega de 5Ω i 0 H
2) omple la següent taula (agafant 4 cicles com a mínim, per exemple 50 hz ->TT = 0.08 segons)
F(Hz) θθ (º) Vpic(V) Ipic(A) Vmitj(V) Imitj(A) Vmitj/Vfont θθ tall/36050 0-18050 0-240
500 0-180500 0-240
Essent:
F = freqüència del interruptor (Hz)
θ = angles de salt del interruptor (º)
Vpic =tensió de pic (V)
Ipic = intensitat de pic (A)
Vmitj =tensió mitjana (V)
Imitj = intensitat mitjana (A)
Vfont =Tensió de la font (V)
θ tall= Angle de tall (º)
3) ara amb una càrrega de 5Ω 10mH omple la següent taulaF(Hz) θθ (º) Vpic(V) Ipic(A) Vmitj(V) Imitj(A) Vmitj/Vfont θθ tall/360
50 0-18050 0-240
500 0-180500 0-240
4) explica quina diferencia hi ha entre alimenta una càrrega purament resistiva iuna inductiva.
Practica 8 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 94 de 98
8.1.3.2 Chopper amb un motor de corrent continua
Es recomana guardar els resultats per tal de poder fer una gràfica amb totes lesvelocitats conjuntament.
1) realitza el circuit de la figura 8.2 i emplena la següent taula
Paràmetres de simulació
TS= 0.00001 TT=3 PT=0 s PS=50F(Hz) θθ (º) nrp(min-1) Irp ΓΓrp Imax ΓΓmax n/nrp Vmitj/Vn
0 0 3500 0-1811000 0-181500 0-2901000 0-290
Essent
F = freqüència del interruptor (Hz)
θ = angles de salt del interruptor (º)
nrp = velocitat del motor de corrent continua (min-1)
n = velocitat del motor de corrent continua a regim permanent i en condicionsnormals (min-1)
Irp = intensitat del motor de corrent continua a regim permanent(A)
Γrp = parell a regim permanent(N·m)
Imax = intensitat pic (A)
Γmax= parell de pic (N·m)
Vn = tensió nominal de la font (V)
Vmitj = Tensió mitjana (tensió mitjana)
- Realitza la gràfica de totes les velocitats a la vegada i explica quin és elcomportament del motor de corrent continua quan esta controlat per un chopper.

Practica 8 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 95de 98
8.2 INFORME DEL CONTROL DE LA VELOCITAT DE UN MOTOR DECORRENT CONTINUA MITJANÇANT UN CONVERTIDOR CONTINUA -CONTINUA
8.2.1 Introducció
Els convertidors continua/continua també anomenats trossejadors o choppers sonuns aparells electrònics que transformen una corrent continua en una altra de continuaamb una tensió diferent.
De choppers n’hi ha de diferents tipus, però nosaltres estudiarem el chopperreductor, que converteix sempre d’una corrent continua mes gran a una de més baixa.
El funcionament del chopper reductor es senzill, tenim una font de correntcontinua, i la tallem a espais temporals petits per a reduir la tensió eficaç i ja tenim unatensio continua diferent de la que teníem en un principi.
Desprès per tal de controlar-lo o tenir un comportament més constant d’aquest, hipodem afegir bobines i condensadors, que ens amortirien els harmònics creats per eltrossejador.
8.2.2 Chopper amb una carrega elèctrica
El circuit del chopper reductor amb una càrrega de 5Ω dona els següents resultatsF(Hz) θθ (º) Vpic(V) Ipic(A) Vmitj(V) Imitj(A) Vmitj/Vfont θθ tall/360
50 0-180 500 100 250 50 .5 .550 0-240 500 100 333 81.6 .66666 .66666
500 0-180 500 100 250 50 .5 .5500 0-240 500 100 333 81.6 .66666 .66666
El circuit del chopper reductor amb una càrrega de 5Ω i 10mH dona els següentsresultats
F(Hz) θθ (º) Vpic(V) Ipic(A) Vmitj(V) Imitj(A) Vmitj/Vfont θθ tall/36050 0-180 500 100 250 50 .5 .550 0-240 500 100 333 66.6 .6666 .6666
500 0-180 500 62.13 250 49.8 .5 .5500 0-240 500 77.7 334 66.7 .6666 .6666

Practica 8 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 96de 98
Fig 8.3: Representació de la intensitat que circula per una carrega elèctrica, roigcarrega resistiva pura, blau carrega resistiva i inductiva, a 500 Hz i activada entre 0-240 º
Fig 8.4: Representació de la intensitat que circula per una carrega elèctrica, roigcarrega resistiva i inductiva a 50 Hz., blau carrega resistiva i inductiva a 500 Hz.activades totes dues entre 0-240 º
Podem veure que el comportament del chopper canvia en funció de la càrrega quesoporta, en el cas de una càrrega purament resistiva obtenim un comportament lineal,però com podem veure al afegir una component inductiva el comportament canvia iobtenim una intensitat que és va atenuant en funció de la freqüència, com es pot veureen la figura 8.4
Aquest fet succeeix d’acord amb la fórmula 8.1 que ens descriu la relació entre lavariació de corrent i la diferencia de potencial induï da. Així doncs quan pugem defreqüència no li estem donant temps a la bobina de carregar-se i descarregar-se, agafantenergia quan el interruptor del chopper esta tancat i tornant-la quan esta obert i no tenimtensió.
dtdI
LV ·= (8.1)
D’altra banda veiem que la tensió es comporta seguint la següent fórmula:
fontV·360
Vmitj
θ= (8.2)
i la tensió no depèn de la freqüència.

Practica 8 - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 97de 98
Fig 8.3: Representació de les velocitats de un motor de corrent continua en diferentsangles de salt. Roig i blau 0-181, verd i violeta 0-290 i groc tot el temps activat
D’altra banda tenim que quan la freqüència és molt baixa li donem temps a labobina de carregar-se i descarregar-se totalment essent la energia emmagatzemadadintre una bobina igual a la fórmula 8.3
2
2
1LIU = (8.3)
Es conserva en tot cas les mitjanes de tensió i intensitat.
8.2.3 Chopper amb un motor de corrent continuaF(Hz) θθ (º) nrp(min-1) Irp ΓΓrp Imax ΓΓmax n/nrp Vmitj/Vn
0 0 3 866.8 40.13 55 238.6 341.2 1 1500 0-181 375.3 38.13 55 127.8 184.3 0.43 0.51000 0-181 370 38.13 55 124.8 180 0.43 0.5500 0-290 673 38 55 194.4 280.4 0.77 0.81000 0-290 678 38 55 193 279 0.77 0.8
Amb els circuits que hem realitzat per a omplir aquesta taula realitzem unagràfica
Com es va esmentar en el informe de la pràctica nº 7 el motor de corrent continuaes comporta seguint la següent formula:
φω
·K
EA= .
Al tenir el flux constant veiem clarament que la velocitat es directamentproporcional a la tensió.
Així doncs, si això ho ajuntem a la fórmula 8.2 obtenim que a mes freqüènciatindrem en el interruptor més constant serà el comportament del motor, i a més angle dedesfasament més tensió.
Podem veure que el motor és comporta d’una forma molt similar a una carregaresistivo-inductiva.
Bibliografia - Laboratori de Control de Màquines Elèctriques
U. R. V. - Escola Tècnica Superior d’Enginyeria Enginyeria Tècnica Industrial en Electricitat
Pagina 98de 98
9 BIBLIOGRAFIAEn la redacció de aquest projecte s’han fet servir els següents llibres i direccions a
internet.
Llibres
D. Enrique Oñós Prados MANIBRA, MANDO Y CONTROL ELECTRICOSEditorial, CEAC, 1992
D. Juan María Ortega Plana MAQUINAS DE CORRIENTE ALTERNA, CEAC,1994
STHEPHEN J. CHAPMAN, MAQUINAS ELECTRICAS, Mc Graw Hill, 1998
Kurt & Reiner Gieck, MANUAL DE FÓRMULAS TÉCNICAS, Marcombo(Boixareu editores) 30a. Edició, 2000
Direccions de internet
http:\\www.etse.urv.es\~llguasch
http:\\www.powersimtech.com
http:\\www.electronicworkbench.com
http:\\www.microcode.com
http:\\www.orcad.com
http://www.esi.unav.es
http://www.uned.es
http://www.upc.es
http://www.ipn.mx
http://spectrum-soft.com
http://ibfriendrich.com
http://www.intusoft.com
http://www.cadmigos.com
http://www.looking.co.uk/spice
http://www.newburytech.co.uk/
http://www.penzar.com/topspice.htm
http://www.designsoftware.com/
http://www.islandlogix.com
http://electrica.uc3m.es/Docencia
ANNEX