Lecciones de Física - ayudaenfisicaM2TX.pdf · apropiados a los Planes Docentes de sus Centros....
398
Lecciones de Física Mecánica 2 Manuel R. Ortega Girón Departamento de Física Aplicada. Universidad de Córdoba. Lecciones de Física i
Transcript of Lecciones de Física - ayudaenfisicaM2TX.pdf · apropiados a los Planes Docentes de sus Centros....

Lecciones de Física
Mecánica 2
Manuel R. Ortega Girón
Departamento de Física Aplicada.Universidad de Córdoba.
Lecciones de Física i
Lecciones de Física (Mecánica 2)
Novena edición: enero 2006
© Copyright. Reservados todos los derechos.
Ninguna parte de este libro puede ser reproducida porcualquier medio, incluidas las fotocopias, sin elpermiso por escrito del autor.
© Copyright: Manuel R. Ortega Girón
Editor: Manuel R. Ortega GirónCL Santa Cruz, 1014.012 Córdoba. España.Tfnos.: +34-957 280 051 (particular)
+34-957 218 483 (departamento)Fax: +34-957 218 483e-mail: [email protected]://www.uco.es/~fa1orgim
Impresión: Reprografía Don FolioCórdoba. España.
I.S.B.N. 84-398-9218-7Depósito legal: CO. 1400-1988
ii Mecánica

A Estela y Olga
Desde la infancia he sido criado en el estudio de las letras y, comoquiera que me aseguraban que por medio de éstas se podía adquirir unconocimiento claro y seguro de todo aquello que es útil para la vida, yotenía un vivísimo deseo de aprenderlas. Pero cuando acabé el curso delos estudios, al finalizar los cuáles es costumbre ser admitido en lajerarquía de los doctos, cambié enteramente de opinión. Por que meencontraba turbado y confuso entre tantas dudas y errores que meparecía no haber obtenido otro provecho, al procurar instruirme, que eldescubrir cada vez mejor mi ignorancia.
RENÉ DESCARTES (1596-1650)
El Discurso del Método.
Manuel R. Ortega Girón iii

iv Lecciones de Física.

Prólogo del autor
Este libro está destinado a los alumnos de Primer Ciclo de las Facultades deCiencias y Escuelas Técnicas. Durante su elaboración he pretendido la consecuciónde dos objetivos principales que entiendo que deben orientar la docencia de lasasignaturas de Física de Primer Ciclo de los estudios universitarios: familiarizar alalumno con el conjunto de los conceptos y leyes básicas que constituyen la esenciade la Física y desarrollar en el estudiante la habilidad para manejar esas ideas y paraaplicarlas a situaciones concretas. Además, creo que estas asignaturas, y muyespecialmente la asignatura correspondiente al Primer Curso Universitario, debenproponerse unos objetivos de cimentación y estructuración de los conocimientosadquiridos en los cursos de enseñanza media.
A lo largo de los sucesivos cursos en los que he participado en la docencia dela Física de Primer Ciclo, en las Universidades de Sevilla, Autónoma de Barcelonay Córdoba, he tenido ocasión de ir perfilando los programas de las asignaturas quese imparten a este nivel, tratando de encontrar el punto de equilibrio entre laextensión de los programas y el nivel y profundidad en el tratamiento de cada unode los temas. Durante este proceso de estructuración y perfeccionamiento, siemprehe tenido muy presente que los programas de estas asignaturas, aunque puedenplantearse de muy diversas formas, con enfoques diferentes, con una gran variedaden cuanto a sus contenidos, ... de ningún modo pueden ser una simple suma de temasinconexos o poco relacionados entre sí, por muy interesantes y bien estructurados queestén cada uno de ellos. Entiendo que el propósito primario de estas asignaturas debeser dar al estudiante una visión unificada de la Física a través de la compresión delos conceptos, leyes y principios que constituyen el aspecto más fundamental de estaciencia.
Por supuesto que conozco muchos y excelentes libros adecuados a este nivel, quesatisfacen en gran medida los requisitos anteriormente expuestos; pero la mayor partede ellos son de procedencia foránea, lo que los distancia, hasta cierto punto, de laproblemática de la enseñanza en nuestras Universidades. Para soslayar esteinconveniente, los profesores suelen recurrir a recomendar a sus alumnos varios librosde texto, como complemento de los apuntes que éstos tomen en clase. Sin embargo,pienso que se facilita enormemente el aprovechamiento de las clases cuando elalumno puede disponer de un texto de base, aunque ello no implique la renuncia ala consulta de otros libros de texto y de obras más especializadas. Fruto de estaconvicción es el presente libro, que será completado con otros tomos, preparados encolaboración con colegas de otras Universidades españolas, hasta cubrir los
Manuel R. Ortega Girón v

vi Prólogo
contenidos que normalmente se desarrollan en las disciplinas de Física de PrimerCiclo de nuestras Facultades y Escuelas Técnicas.
No debería considerarse esta obra como un libro más de Física General, en laacepción que tradicionalmente tiene esta denominación, ya que tanto su nivel comosu extensión son notablemente superiores a los que encontramos normalmente en loslibros de texto de tal denominación. Mi intención ha sido desarrollar un programa enel que tengan cabida aquellos temas de la Física Clásica que configuran loscontenidos de la Física que se enseña en los primeros cursos universitarios, en susvertientes científica y técnica, prestando una atención especial a la asignatura dePrimer Curso, de modo que los profesores puedan seleccionar los temas que seanapropiados a los Planes Docentes de sus Centros.
Incluso algunas Lecciones de esta obra, que normalmente se incluyen en elprograma de la asignatura de Primer Curso, tienen un nivel algo superior al quenormalmente encontramos en los textos de Física General. De este modo, el profesorpodrá graduar el nivel de sus enseñanzas al de la preparación previa de sus alumnos,evitando así que la Física que se enseña en los primeros cursos universitarios sea, enalgunos casos, una mera repetición de la correspondiente al Curso de OrientaciónUniversitaria.
No puedo dejar de expresar mi agradecimiento a todos aquellos compañeros quede un modo u otro han colaborado en la preparación de este libro, muy especialmentea mis amigos y colegas los Dres. José A. Ibáñez Mengual (U. Murcia) y AlejoVidal-Quadras Roca (UAB), cuyas acertadas sugerencias y útiles intercambios depuntos de vista me han resultado muy provechosos, y a mis compañeros en las tareasdocentes, los Dres. C. Baixeras (UAB), D. Baró (UAB), S. Bordas (UAB),A. Coronas (U. Tarragona), C. Domingo (UAB), F. González (U. Granada),F. Fernández (UAB), A. Hernández (U. Valladolid), J.I. Jiménez (U. Granada),E. Martín (U. Murcia), R. Perea (E.U. Jaén), L.F. Sanz (U. Valladolid),S. Suriñach (UAB) y M.A. Villamañán (U. Valladolid), por la buena acogida quehan dispensado a estas Lecciones de Física y por sus útiles comentarios ysugerencias.
Córdoba, Enero 2006.

Lecciones de Física
Mecánica 2
Manuel R. Ortega Girón vii

viii Índice de materias.
I. 1. Álgebra vectorial.2. Vectores deslizantes.3. Análisis vectorial.4. Cinemática de la partícula.5. Cinemática del sólido rígido.6. Principios de la Mecánica Clásica. La ley de la inercia.7. Segunda y tercera leyes de Newton. Conservación de la
cantidad de movimiento.8. Las fuerzas de la Naturaleza.9. Sistemas de referencia en rotación.
10. Trabajo y energía.11. Conservación de la energía.12. Momento angular. Fuerzas centrales.
II. 13. Movimiento armónico simple.14. Oscilaciones amortiguadas y forzadas.15. Superposición de movimientos armónicos simples.16. Geometría de masas.17. Sistemas de partículas.18. Sistemas de masa variable. El problema de 2-cuerpos.19. Colisiones.20. Estática del sólido rígido.21. Dinámica del sólido rígido.22. Trabajo y energía en el movimiento general del sól. ríg.23. Ecuaciones de Euler.24. Dinámica impulsiva del sólido rígido.
III. 25. La ley de la Gravitación Universal.26. El campo gravitatorio.27. Elementos de elasticidad.28. Elastostática.29. Estática de los fluidos.30. Tensión superficial.31. Cinemática de los fluidos.32. Dinámica de los fluidos ideales.33. Dinámica de los fluidos reales.34. Flujo viscoso.
IV. 35. Ondas progresivas.36. Fenómenos ondulatorios en medios ilimitados.37. Fenómenos ondulatorios en medios limitados.38. Ondas estacionarias.39. Acústica física.40. Acústica musical y arquitectónica.
Apéndices.

Índice de materias
CÁP. IV.- OSCILACIONES.13.- Movimiento armónico simple. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
§13.1. Movimiento periódico. Oscilaciones (363); §13.2. Cinemática del movimientoarmónico simple (364); §13.3. Representación de Fresnel del m.a.s (368);§13.4. Dinámica del movimiento armónico simple (370); §13.5. Energía en el m.a.s.(371); §13.6. Energías cinética y potencial medias (373); §13.7. Oscilaciones en lasproximidades del equilibrio (375); §13.8. Sistema masa-muelle (380); §13.9. Péndulosimple (385); §13.10. Solución exacta del problema del péndulo (388);§13.11. Péndulo cicloidal (391); Problemas (392)
14.- Oscilaciones amortiguadas y forzadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 397§14.1. Rozamiento (398); §14.2. Oscilador armónico amortiguado (399);§14.3. Amortiguamiento débil (400); §14.4. Disipación de energía (402);§14.5. Factor de calidad (404); §14.6. Amortiguamiento crítico (405);§14.7. Sobreamortiguamiento (406); §14.8. Oscilaciones forzadas (407);§14.9. Absorción de potencia. Resonancia (412); §14.10. Impedancia de un oscilador(420); Problemas (424)
15.- Superposición de movimientos armónicos simples. . . . . . . . . . . . . . . . . . . . . 429§15.1. Principio de superposición (429); §15.2. Teorema de Fourier (432);§15.3. Convergencia de las series de Fourier (436); §15.4. Fuerzas impulsoras pe-riódicas (436); §15.5. Superposición de dos m.a.s. en una dimensión (439);§15.6. Superposición de dos m.a.s. en direcciones perpendiculares (444); Problemas(452)
CÁP. V.- DINÁMICA DE LOS SISTEMAS DE PARTÍCULAS.16.- Geometría de masas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 457
§16.1. Distribuciones discretas y continuas de materia (457); §16.2. Centro de masa(458); §16.3. Teoremas concernientes al centro de masa (461); §16.4. Momentos deinercia (470); §16.5. Radio de giro (472); §16.6. Productos de inercia (472);§16.7. Matriz de inercia (473); §16.8. Teoremas concernientes a los momentos yproductos de inercia (474); §16.9. Teoremas de Steiner (477); §16.10. Momento deinercia respecto a un eje cualquiera (479); Problemas (485)
17.- Sistemas de partículas. Leyes de conservación. . . . . . . . . . . . . . . . . . . . . . . . 489§17.1. El problema de los N-Cuerpos (490); §17.2. Cantidad de movimiento (492);§17.3. Conservación de la cantidad de movimiento (493); §17.4. Movimiento delcentro de masa (495); §17.5. Sistema de referencia del centro de masa (497);§17.6. Momento angular (498); §17.7. Conservación del momento angular (503);§17.8. Momentos angulares orbital e interno (505); §17.9. Energía cinética (508);§17.10. Energía potencial (510); §17.11. Conservación de la energía (512);Problemas (515)
Manuel R. Ortega Girón ix
x Índice de materias
18.- Sistemas de masa variable. El problema de 2-cuerpos. . . . . . . . . . . . . . . . . . 519§18.1. Sistemas de masa variable (519); §18.2. Fundamentos de la propulsión de loscohetes (522); §18.3. El problema de dos cuerpos (525); §18.4. Masa reducida (528);§18.5. Momento angular y energía cinética (529); §18.6. Oscilaciones de dos cuerpos(531); §18.7. Movimiento en el Sistema Solar (534); Problemas (536)
19.- Colisiones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 541§19.1. Colisiones (541); §19.2. Dinámica impulsiva de la partícula (543);§19.3. Colisiones frontales. Coeficiente de restitución (545); §19.4. Colisionesoblicuas (549); §19.5. Descripción de la colisión en el referencial del centro de masa(551); §19.6. Transformación de ángulos (557); §19.7. Balance energético en lascolisiones. Definición del Q (560); §19.8. Estudio de las colisiones en función delQ (566); §19.9. Algo más acerca de las colisiones elásticas (568);§19.10. Reacciones (573); §19.11. Umbral de reacción (575); §19.12. Ecuación delQ (576); Problemas (577)
CÁP. VI.- DINÁMICA DEL SÓLIDO RÍGIDO.20.- Estática del sólido rígido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 587
§20.1. Estática (587); §20.2. Equilibrio del sólido rígido (588); §20.3. Fuerzasaplicadas a un sólido rígido (589); §20.4. Ecuaciones cardinales de la estática (590);§20.5. Centro de gravedad (592); §20.6. Sistemas con ligaduras. Grados de libertad(594); §20.7. Estática del sólido rígido sujeto a ligaduras (596); §20.8. Diagrama delcuerpo libre (600); §20.9. Estática de un sistema de cuerpos rígidos (602);§20.10. Concepto de desplazamiento virtual (604); §20.11. Principio de los trabajosvirtuales (605); Problemas (611)
21.- Dinámica del sólido rígido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 619§21.1. Movimiento de traslación del sólido rígido (620); §21.2. Momento angular delsólido rígido. Coeficientes de inercia (621); §21.3. Tensor de inercia (623);§21.4. Momentos angulares orbital e intrínseco (625); §21.5. Ejes principales deinercia (626); §21.6. Movimiento de rotación del sólido rígido alrededor de un ejefijo (630); §21.7. Péndulo físico. Teorema de Huygens (632); §21.8. Conservacióndel momento angular (636); §21.9. Movimiento giroscópico. El trompo (640);§21.10. El giroscopio (643); §21.11. Aplicaciones del movimiento giroscópico (645);Problemas (648)
22.- Trabajo y energía en el movimiento general del sólido rígido. . . . . . . . . . . . . 655§22.1. Energía cinética del sólido rígido (655); §22.2. Energía cinética de rotación(657); §22.3. Eje instantáneo de rotación y deslizamiento (660); §22.4. Rodadura(661); §22.5. Resistencia a la rodadura (663); §22.6. Expresión del trabajo (666);§22.7. Teorema de la energía cinética (667); §22.8. Conservación de la energía(668); Problemas (673)
23.- Ecuaciones de Euler. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 679§23.1. Ecuaciones del movimiento en un referencial solidario (679);§23.2. Ecuaciones de Euler (683); §23.3. Movimiento libre del sólido rígido (685);§23.4. Peonza esférica (686); §23.5. Peonza simétrica (686); §23.6. Precesión del ejede rotación de la Tierra (690); §23.7. Estabilidad de la rotación (691); Problemas(694)
24.- Dinámica impulsiva del sólido rígido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 697§24.1. Dinámica impulsiva del sólido rígido (697); §24.2. Percusión y percusiónangular (697); §24.3. Ecuaciones fundamentales de la dinámica impulsiva (698);§24.4. Movimiento plano. Teorema del centro de percusión (700); §24.5. Percusionessobre un sólido ligado (702); §24.6. Percusiones sobre un sólido con un punto fijo(703); §24.7. Percusiones sobre un sólido con un eje fijo (705); §24.8. Colisiones.

Índice de materias xi
Coeficiente de restitución (707); §24.9. Ecuación simbólica de la dinámica impulsiva(712); §24.10. Teorema de Carnot (712); Problemas (715)
APÉNDICES.A.- Resultados de los problemas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 721B.- Índice alfabético. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 737

xii Índice de materias

Capítulo IV.
Oscilaciones.
13.- Movimiento armónico simple. 363
14.- Oscilaciones amortiguadas y forzadas. 397
15.- Superposición de
movimientos armónicos simples. 429
Manuel R. Ortega Girón 361

362 Lecciones de Física

13.- Movimiento armónico simple.
§13.1. Movimiento periódico. Oscilaciones (363); §13.2. Cinemática del movimientoarmónico simple (364); §13.3. Representación de Fresnel del m.a.s (368); §13.4. Dinámicadel movimiento armónico simple (370); §13.5. Energía en el m.a.s. (371); §13.6. Energíascinética y potencial medias (373); §13.7. Oscilaciones en las proximidades del equilibrio(375); §13.8. Sistema masa-muelle (380); §13.9. Péndulo simple (385); §13.10. Soluciónexacta del problema del péndulo (388); §13.11. Péndulo cicloidal (391); Problemas (392)
§13.1. Movimiento periódico. Oscilaciones.- Llamamos movimientoperiódico a cualquier movimiento que se repita a intervalos iguales de tiempo. Eltiempo que debe transcurrir para que se produzca la repetición del movimiento recibeel nombre de periodo y lo designaremos por T. Como veremos en §15.2, eldesplazamiento de una partícula que realiza un movimiento periódico general puedeexpresarse siempre mediante una combinación apropiada de funciones sinusoidalesy cosinusoidales. Como tales funciones reciben el calificativo de armónicas, elmovimiento periódico suele recibir, también, el nombre de movimiento armónico. Enla Física, o lo que es lo mismo, en la Naturaleza, encontramos abundantes ejemplosde movimientos periódicos. Así, el movimiento de una masa sujeta a un muelle, elmovimiento de la Tierra en el sistema solar, el movimiento de un péndulo o delbalancín de un reloj, las vibraciones de los átomos en una molécula, ... son ejemplosde movimientos periódicos1.
Cuando una partícula que realiza un movimiento periódico se mueve alternativa-mente en un sentido y en otro sobre una misma trayectoria (movimiento de vaivén),su movimiento recibe el nombre de oscilatorio o vibratorio; esta última denomina-ción suele reservarse para cuando el periodo es muy pequeño. Así, hablaremos de lasoscilaciones de una masa sujeta a un muelle o del péndulo de un reloj, peropreferiremos referirnos a las vibraciones de los átomos en la red cristalina de unsólido. En general, las oscilaciones o vibraciones predominantes en los objetos degran tamaño suelen ser lentas (oscilaciones), en tanto que las de los objetos pequeños
1 La definición del movimiento periódico presupone una duración infinita del movimiento, sinprincipio ni fin. En los procesos reales, los movimientos periódicos están definidos solamentedurante un cierto intervalo finito de tiempo en el que se verifican las condiciones de periodicidad.
Manuel R. Ortega Girón 363

364 Lec. 13.- Movimiento armónico simple.
suelen ser rápidas (vibraciones). Cuando no estemos interesados en hacer lamatización anterior, nos referiremos sencillamente a las oscilaciones.
El movimiento oscilatorio más importante es el movimiento armónico simple(m.a.s.), debido a que, además de ser el más fácil de describir matemáticamente,constituye un modelo exacto o aproximado para muchos sistemas físicos, mecánicosy no mecánicos. En este capítulo, concentraremos preferentemente nuestra atenciónsobre esta clase de movimiento. Comenzaremos, en esta lección, con una brevedescripción puramente cinemática del m.a.s., para analizar después algunas de suspropiedades dinámicas que nos permitirán considerar el m.a.s. como un problemafísico real, y no sólo como un interesante problema matemático.
§13.2. Cinemática del movimiento armónico simple.- Decimos que una
Figura 13.1
partícula que se mueve a lo largo del eje x realiza un movimiento armónico simple,centrado en el origen O de dicho sistema coordenado, cuando su desplazamiento xcon respecto al origen viene expresado en función del tiempo en la forma:
[13.1]x A sen(ω t ψ)
donde A, ω y ψ son constantes. La distanciax que separa la partícula del origen O recibeel nombre de elongación. Puesto que lafunción seno puede tomar todos los valorescomprendidos entre -1 y +1, los valores dela elongación estarán comprendidos entre -A
y +A. La cantidad positiva A, que corresponde al valor absoluto de la elongaciónmáxima, se denomina amplitud del movimiento armónico simple. La cantidad ωt +ψ recibe el nombre de fase del movimiento y, por ello, la constante ψ es la constantede fase o fase inicial; i.e., el valor de la fase correspondiente al instante inicial (t=0).Puesto que la función seno repite sus valores cuando el ángulo aumenta en 2π, lapartícula repetirá su elongación (y también su velocidad, como veremos) cuando lafase del movimiento aumenta en 2π desde su valor en un instante t. Durante elintervalo tiempo en que la fase aumenta en 2π la partícula completa una oscilacióno ciclo de su movimiento. Podemos determinar el periodo T del movimiento teniendoen cuenta que la fase en el instante t+T debe superar en 2π a la fase en el instantet; esto es,
[13.2][ ω ( t T ) ψ ] [ ω t ψ ] ωT 2π
de modo que [13.3]T 2πω
La frecuencia ν del movimiento es el número de oscilaciones o ciclos que secompletan en la unidad de tiempo. Su valor es, obviamente, el recíproco del periodo:
[13.4]ν 1T

§13.2.- Cinemática del movimiento armónico simple. 365
y se mide en ciclos por segundo o hercios (Hz), en honor de H. R. HERTZ2.Obsérvese que tanto la frecuencia como el periodo del m.a.s. son independientes
de la amplitud de las oscilaciones; esta propiedad se suele enunciar diciendo que lasoscilaciones armónicas simples son isócronas, y constituye una característicaimportante del m.a.s..
El parámetro ω recibe el nombre de frecuencia angular y, también, el depulsación, aunque preferiremos el primero. La frecuencia angular se mide en radianespor segundo (rad/s), o sea, en las mismas unidades que la velocidad angular. Entrela frecuencia angular (ω) y la frecuencia (ν) existe la relación siguiente3:
[13.5]ω 2πν
El valor de la constante de fase ψ depende de la elección que hagamos delinstante inicial. Si escogemos t=0 en el instante en que x=0, la constante de fase ψvaldrá cero o π, según que la partícula se dirija en ese instante inicial hacia las xpositivas o negativas. Entonces, el m.a.s. vendrá descrito por una u otra de lasexpresiones siguientes:
[13.6]x A senω t x A sen(ω t π ) A senω t
En cambio, si escogemos el instante t=0 cuando x=A, la constante de fase ψ tomaráel valor π/2 y la ecuación del m.a.s. será
[13.7]x A sen (ω t π2
) A cosω t
En general, cuando la constante de fase ψ tiene un valor arbitrario cualquiera, en elinstante t=0 la partícula se encontraba en la posición
[13.8]x0 A senψ ⇒ ψ arcsenx0
A
Es fácil comprender que aunque hemos escogido la función seno para describir el m.a.s.,igualmente hubiéramos podido escoger la función coseno. Ambas funciones armónicas tiene lamisma forma; pero la función coseno está adelantada en π/2 rad respecto a la función seno. Así,el m.a.s. puede describirse también por una ecuación de la forma
[13.9]x A cos (ω t φ )
2 Heinrich Rudolph HERTZ (1857-94), físico alemán. Realizó importantes estudios teóricos yexperimentales en el campo de la Electrodinámica. Sus investigaciones confirmaron experimen-talmente la existencia de las ondas electromagnéticas y la identidad de la naturaleza de éstas conla luz, como habían predicho FARADAY y MAXWELL.
3 Muchos autores utilizamos la denominación común de frecuencia para referirnos tanto a lafrecuencia (ν) propiamente dicha como a la frecuencia angular (ω). Obviamente, el contexto y lasunidades en que se expresan siempre permiten resolver la ambigüedad.

366 Lec. 13.- Movimiento armónico simple.
donde A y ω son las mismas constantes definidas anteriormente. La constante de fase φ deberácalcularse ahora de modo que las expresiones [13.1] y [13.9] sean idénticas. Recordemos que para unángulo θ cualquiera es válida la relación
[13.10]cosθ sen (θ π2
)
de modo que la identidad
[13.11]A sen (ω t ψ) A cos (ω t φ )
exige que [13.12]sen (ω t ψ) sen (ω t φ π2
)
Los senos de dos ángulos son iguales si estos son iguales o difieren en un múltiplo entero de 2π.Tomando la posibilidad más sencilla, tenemos
[13.13]ψ φ π2
⇒ φ ψ π2
La equivalencia entre las expresiones [13.1] y [13.9] nos permiten describir un m.a.s. bien en funcióndel seno o del coseno. Nosotros hemos adoptado la primera posibilidad, aunque en alguna ocasióntambién haremos uso de la segunda.
En las gráficas de la Figura 13.2a hemos representado la función Asen(ωt+ψ) parados valores distintos de la constante de fase ψ. Obsérvese que una constante de fasepositiva indica un adelanto de la forma sinusoidal y que una constante de fasenegativa representa un retraso.
La velocidad de la partícula que realiza un m.a.s. es
[13.14]v dxdt
ω A cos (ω t ψ) ω A sen (ω t ψ π2
)
de modo que la velocidad varía también según una ley sinusoidal, pero estáadelantada π/2 respecto a la elongación. En la Figura 13.2b hemos representadográficamente la función v(t). Obsérvese que la velocidad de la partícula se anulacuando su elongación es máxima y que tiene su valor máximo (vmáx= ωA) cuando lapartícula pasa por la posición de equilibrio (x=0).
Para un valor cualquiera de la constante de fase ψ, la velocidad de la partículaen el instante inicial (t=0) es
[13.15]v0 ω A cosψ
Las relaciones [13.8] y [13.15] nos permiten expresar A y ψ en función de lascondiciones iniciales del movimiento; es decir, en función de la elongación (x0) y dela velocidad (v0) de la partícula en el instante inicial (t=0). Tenemos
[13.16]A x 20
v 20
ω 2ψ arctg
ω x0
v0
donde ω es un parámetro cuyo valor es independiente de las condiciones iniciales,que se determinará, como veremos más adelante, por otro procedimiento.
§13.2.- Cinemática del movimiento armónico simple. 367
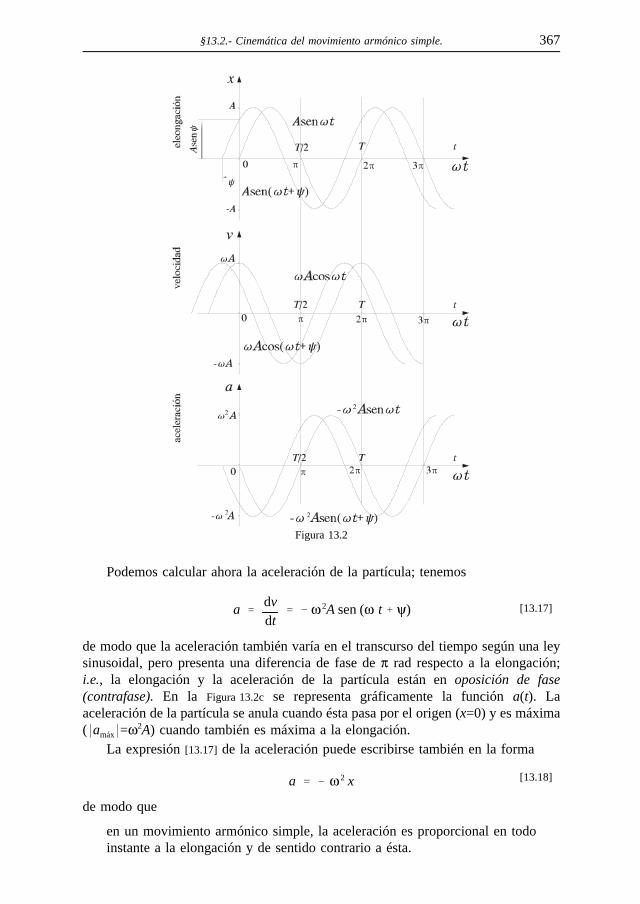
Podemos calcular ahora la aceleración de la partícula; tenemos
Figura 13.2
[13.17]a dvdt
ω 2A sen (ω t ψ)
de modo que la aceleración también varía en el transcurso del tiempo según una leysinusoidal, pero presenta una diferencia de fase de π rad respecto a la elongación;i.e., la elongación y la aceleración de la partícula están en oposición de fase(contrafase). En la Figura 13.2c se representa gráficamente la función a(t). Laaceleración de la partícula se anula cuando ésta pasa por el origen (x=0) y es máxima( amáx =ω2A) cuando también es máxima a la elongación.
La expresión [13.17] de la aceleración puede escribirse también en la forma
[13.18]a ω 2 x
de modo que
en un movimiento armónico simple, la aceleración es proporcional en todoinstante a la elongación y de sentido contrario a ésta.
368 Lec. 13.- Movimiento armónico simple.
Este resultado es importante dado que al ser la aceleración de una partícula elcociente entre la fuerza resultante que actúa sobre ella y la masa de la partícula(a=F/m), la fuerza que deberá actuar sobre una partícula para originar un m.a.s.deberá ser también proporcional a la elongación de la partícula y de signo contrarioa ésta; esto es,
[13.19]F ma mω 2 x kx
con k=mω2. Volveremos a tratar este asunto más adelante.
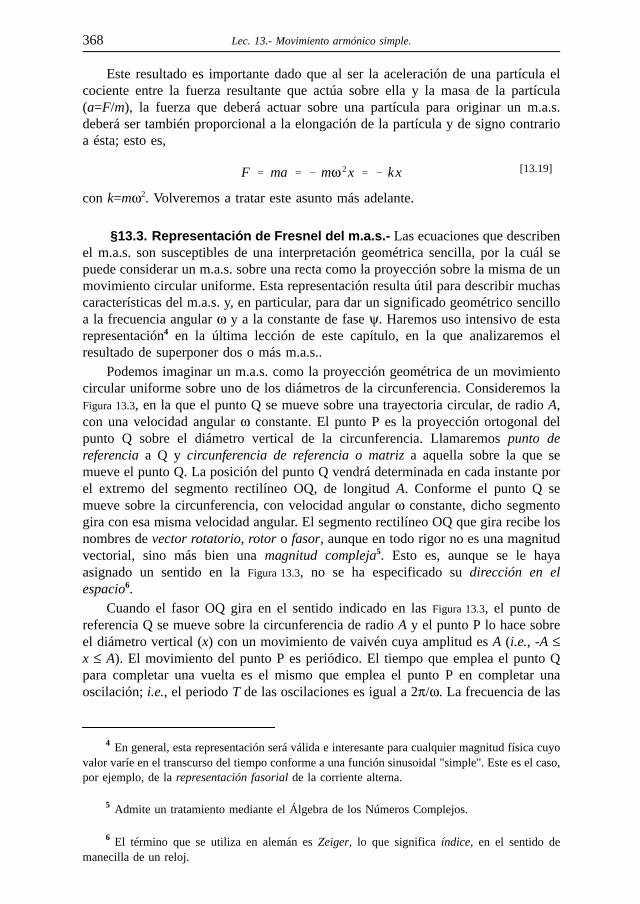
§13.3. Representación de Fresnel del m.a.s.- Las ecuaciones que describenel m.a.s. son susceptibles de una interpretación geométrica sencilla, por la cuál sepuede considerar un m.a.s. sobre una recta como la proyección sobre la misma de unmovimiento circular uniforme. Esta representación resulta útil para describir muchascaracterísticas del m.a.s. y, en particular, para dar un significado geométrico sencilloa la frecuencia angular ω y a la constante de fase ψ. Haremos uso intensivo de estarepresentación4 en la última lección de este capítulo, en la que analizaremos elresultado de superponer dos o más m.a.s..
Podemos imaginar un m.a.s. como la proyección geométrica de un movimientocircular uniforme sobre uno de los diámetros de la circunferencia. Consideremos laFigura 13.3, en la que el punto Q se mueve sobre una trayectoria circular, de radio A,con una velocidad angular ω constante. El punto P es la proyección ortogonal delpunto Q sobre el diámetro vertical de la circunferencia. Llamaremos punto dereferencia a Q y circunferencia de referencia o matriz a aquella sobre la que semueve el punto Q. La posición del punto Q vendrá determinada en cada instante porel extremo del segmento rectilíneo OQ, de longitud A. Conforme el punto Q semueve sobre la circunferencia, con velocidad angular ω constante, dicho segmentogira con esa misma velocidad angular. El segmento rectilíneo OQ que gira recibe losnombres de vector rotatorio, rotor o fasor, aunque en todo rigor no es una magnitudvectorial, sino más bien una magnitud compleja5. Esto es, aunque se le hayaasignado un sentido en la Figura 13.3, no se ha especificado su dirección en elespacio6.
Cuando el fasor OQ gira en el sentido indicado en las Figura 13.3, el punto dereferencia Q se mueve sobre la circunferencia de radio A y el punto P lo hace sobreel diámetro vertical (x) con un movimiento de vaivén cuya amplitud es A (i.e., -A ≤x ≤ A). El movimiento del punto P es periódico. El tiempo que emplea el punto Qpara completar una vuelta es el mismo que emplea el punto P en completar unaoscilación; i.e., el periodo T de las oscilaciones es igual a 2π/ω. La frecuencia de las
4 En general, esta representación será válida e interesante para cualquier magnitud física cuyovalor varíe en el transcurso del tiempo conforme a una función sinusoidal "simple". Este es el caso,por ejemplo, de la representación fasorial de la corriente alterna.
5 Admite un tratamiento mediante el Álgebra de los Números Complejos.
6 El término que se utiliza en alemán es Zeiger, lo que significa índice, en el sentido demanecilla de un reloj.
§13.3.- Representación de Fresnel del m.a.s. 369
oscilaciones del punto P coincide con el número de vueltas que completa el punto
Figura 13.3
Q en la unidad de tiempo; esto es, ν=ω/2π=1/T. Por último, la frecuencia angularde las oscilaciones de P coincide con la velocidad angular del punto Q de referencia.
Hagamos que en el instante inicial (t=0) el fasor OQ forme un ángulo ψ con eldiámetro horizontal de la circunferencia de referencia. Al cabo de un tiempo t dichoángulo valdrá ωt+ψ y la elongación del punto P será, en ese instante
[13.20]x A sen (ω t ψ)
de modo que el movimiento
Figura 13.4
del punto P es un movimientoarmónico simple. En estarepresentación, la fase ωt+ψ esel ángulo que forma el fasorOQ con el diámetro de refe-rencia (horizontal) en un ins-tante dado.
El alumno demostraráfácilmente que la velocidad yla aceleración del punto Ppueden obtenerse tambiéncomo las proyecciones respectivas de la velocidad y de la aceleración del punto Qde referencia sobre el diámetro vertical de la circunferencia matriz, como se indicaen la Figura 13.4.
En definitiva, la elongación de una partícula
Figura 13.5
que realiza un m.a.s. puede considerarse comola componente sobre el eje x (vertical) de unvector rotante o fasor x, cuyo módulo es iguala la amplitud A del m.a.s. y que gira en elsentido antihorario con una velocidad angularconstante ω que se corresponde con la frecuen-cia angular del m.a.s, de modo que forma encada instante un ángulo ωt+ψ con el eje hori-zontal de referencia, representando dicho ángulo

370 Lec. 13.- Movimiento armónico simple.
la fase del m.a.s.. La velocidad y la aceleración de la partícula pueden representarsetambién por sendos vectores rotantes o fasores, v y a, cuyos módulos son ωA y ω2A,respectivamente, de modo que sus componentes sobre el eje x (vertical) dan la veloci-dad y la aceleración de la partícula que ejecuta el m.a.s.. En la Figura 13.5 se ilustranlos fasores x, v y a en un instante dado; en ella puede apreciarse que v y a presentanun adelanto de fase de π/2 y π rad, respectivamente, en relación al fasor x.
§13.4. Dinámica del movimiento armónico simple.- La expr. [13.18] de laaceleración de una partícula que ejecuta un movimiento armónico simple nospermitió calcular la fuerza que debe actuar sobre dicha partícula, de masa m, para quetenga lugar ese movimiento. Ya hemos visto que dicha fuerza debe ser directamenteproporcional a la elongación y de sentido contrario a ella; esto es,
[13.21]F ma mω 2 x kx
donde hemos definido una nueva constante, k, esencialmente positiva, llamadaconstante de fuerza, mediante la expresión
[13.22]k m ω 2 o bien ω k
m
En consecuencia, la fuerza F está dirigida en todo instante hacia el origen, quecorresponde al punto O (de abscisa x=0), siendo nula cuando la partícula pasa pordicho punto; el punto O es la posición de equilibrio. La fuerza F es una fuerzaatractiva, siendo O el centro de atracción.
La fuerza expresada por [13.21] es el tipo de fuerza que aparece cuando sedeforma un cuerpo elástico, tal como un muelle, y la ley de fuerza que la expresarecibe el nombre de ley de Hooke, en honor de Robert HOOKE (1635-1703) queenunció las leyes de las deformaciones elásticas de los cuerpos. Por esa razón laconstante k suele recibir el nombre de constante elástica. Dicha constante representala fuerza que debemos aplicar para mantener desplazada la partícula una unidad dedistancia a partir de su posición de equilibrio; sus unidades son newton por metro(N/m) en el sistema internacional (S.I.).
Debemos señalar que en la ec. [13.22] la constante ω (frecuencia angular delm.a.s.) queda determinada en función de los valores que posean la masa (m) de lapartícula y la constante de fuerza (k) del sistema oscilante (un muelle, por ejemplo).Esas son las dos características esenciales que intervienen en el establecimiento deun movimiento oscilatorio:
1. Una componente inercial, con la que estará asociada la energía cinéticadel sistema oscilante.
2. Una componente elástica, capaz de almacenar energía potencial (elástica).
Recuérdese que las otras dos constantes que aparecen en la ec. [13.1] que describeel m.a.s., esto es la amplitud (A) y la constante de fase (ψ), deben determinarse apartir de las condiciones iniciales del sistema (x0,v0) y que, por tanto, no dependende las características intrínsecas o esenciales del mismo.

§13.4.- Dinámica del movimiento armónico simple. 371
La relación [13.22] nos permite expresar el periodo (T) y la frecuencia (ν) de unmovimiento armónico simple en función de la masa de la partícula y de la constanteelástica de la fuerza que actúa sobre ella; tenemos
[13.23]T 2π m
k⇒ ν 1
2πkm
Hemos comenzado esta lección definiendo el movimiento armónico simplemediante sus propiedades cinemáticas expresadas por la ex. [13.1] y sus derivadasrespecto al tiempo. A partir de esas propiedades cinemáticas hemos sido capaces deencontrar el tipo de fuerza que debe aplicarse a la partícula para que su movimientosea armónico simple [13.21]. Sin embargo, es interesante que abordemos también elproblema inverso; esto es, dada una fuerza del tipo F=-kx, encontrar la clase demovimiento que esa fuerza origina.
Supongamos que sobre una partícula de masa m actúa una fuerza dada por F=-kx.La segunda ley del movimiento nos permite escribir
[13.24]F kx mx
ec. dif. de segundo orden que podemos escribir en la forma
[13.25]mx kx 0 ⇒ x ω 2x 0
con ω2=k/m. La ec. dif. [13.25] requiere que x(t) sea alguna función cuya segundaderivada sea el valor negativo de la función misma, salvo en un factor constante ω2.Sabemos que las funciones armónicas (seno y coseno) tiene esa propiedad. Por lotanto, la solución de la ec. dif. [13.25] debe ser de la forma
[13.26]x A sen(ω t ψ)
solución que podemos verificar sustituyéndola directamente en la ec. dif. de partida.Las dos constantes A y ψ son las correspondientes a las dos etapas de integración dela ec. diferencial. En definitiva, la función [13.26] es la solución general de la ec. dif.del movimiento [13.25], de modo que podemos asegurar que una fuerza de atracciónproporcional a la elongación origina siempre un movimiento armónico simple.
§13.5. Energía en el m.a.s..- Resulta interesante e instructivo analizar el m.a.s.bajo el punto de vista energético. Teniendo en cuenta que la aceleración de lapartícula puede expresarse en la forma
[13.27]x a v dvdx
la ecuación diferencial [13.25a] del movimiento producido por una fuerza del tipo F=-kx puede reescribirse como
[13.28]mv dv kx dx 0
que es una ec. dif. de primer orden. Esta ec. dif. nos conduce, por integración, a

372 Lec. 13.- Movimiento armónico simple.
[13.29]12
mv 2 12
kx 2 cte. E
El primer término de esta expresión es la energía cinética de la partícula; elsegundo término corresponde a la energía potencial. En consecuencia, la constantedel segundo miembro es la energía total E; esto es,
[13.30]E Ek Ep
Por lo tanto, la energía total de la partícula es una constante del movimiento, comocabía esperar para un sistema conservativo.
El significado de la relación anterior se pone de manifiesto mediante la gráficade la Figura 13.6, en la que se ha representado la energía (potencial) en ordenadas yla elongación en abscisas. Comenzamos por dibujar la curva de la energía potencialEp=kx2/2, que es una parábola de eje vertical y con su vértice en el origen. Acontinuación trazamos una recta horizontal, que corresponde al valor constante de laenergía total E. Entonces se comprueba que el movimiento de la partícula quedarestringido al intervalo -A≤x≤A, ya que los puntos x=-A y x=+A son puntos deretroceso. Fuera del intervalo anteriormente citado la energía potencial superaría ala energía total, de modo que la energía cinética sería negativa, cosa imposible puesimplicaría una velocidad imaginaria. Así pues, el movimiento tiene lugar en un pozode potencial, cuyo fondo corresponde a la posición de equilibrio estable.
Si trazamos una recta vertical para cualquier x, tal que (-A≤x≤A), la longitud del
Figura 13.6
segmento de dicha recta comprendido entre el eje de abscisas y la parábola representala energía potencial correspondiente a ese valor de la elongación; y la longitud delsegmento comprendido entre la parábola y la recta horizontal E=cte corresponde a
la energía cinética. Conforme la partículase mueve entre los límites -A y +A, hayuna conversión continua de energíacinética a potencial y viceversa. Cuandola partícula se aleja de la posición deequilibrio (x=0) aumenta la energíapotencial a expensas de la energíacinética; ocurre lo contrario cuando lapartícula se aproxima a la posición deequilibrio. En los puntos de retrocesotoda la energía es potencial; en laposición de equilibrio toda la energía escinética. La velocidad de la partículacuando pasa por la posición de equilibriotoma su valor máximo; esto es,
[13.31]E 1
2mv 2
máx ⇒ vmáx
2Em
En los extremos de la trayectoria, la elongación presenta su valor máximo xmáx =Ay es

§13.5.- Energía en el m.a.s.. 373
[13.32]E 1
2kA 2 ⇒ A 2E
k
La velocidad de la partícula cuando pasa por un punto de elongación genéricax se puede obtener a partir de [13.29]. Se tiene
[13.33]v 2E kx 2
mkA 2 kx 2
mkm
A 2 x 2 ω A 2 x 2
con ω2=k/m, como anteriormente. Ahora podemos obtener la elongación en funcióndel tiempo, x(t), sustituyendo v por dx/dt en la ecuación anterior e integrando
[13.34]⌡⌠
x
x0
dx
A 2 x 2
ω ⌡⌠
t
0
dt
que nos conduce a [13.35]arcsen xA
arcsenx0
Aω t
de modo que, haciendo
[13.36]ψ arcsenx0
A⇒ sen ψ
x0
A
se tiene finalmente [13.37]x A sen (ω t ψ)
que es, como ya sabemos, la ecuación cinemática que describe un movimientoarmónico simple.
§13.6. Energías cinética y potencial medias.- Las energías cinética ypotencial del oscilador armónico simple son funciones del tiempo y vienen dadas por
[13.38]
⎧⎪⎪⎨⎪⎪⎩
Ek
12
mx 2 12
mω 2A 2 cos2(ω t ψ)
Ep
12
kx 2 12
kA 2 sen2(ω t ψ)
donde hemos empleado las expresiones [13.1] y [13.14] que nos dan la elongación y lavelocidad de la partícula en función del tiempo. En la Figura 13.9 hemos representadográficamente las energías cinética y potencial del oscilador armónico simple enfunción del tiempo (con ψ=0). Obsérvese que ambas funciones son periódicas, deperiodo T/2, y que su suma, esto es, la energía total E, permanece constante en eltranscurso del tiempo, siendo su valor
[13.39]E Ek Ep
12
mω 2A 2 12
kA 2

374 Lec. 13.- Movimiento armónico simple.
VALOR MEDIO DE UNA FUNCIÓN RESPECTO AL TIEMPO
Sea F(t) una función del tiempo. Se llama valor medio de la función F(t) en el intervalo detiempo Δt=t2-t1 al valor
Figura 13.7
F(t) 1t2 t1
⌡⌠
t2
t1
F(t) dt
Geométricamente, puesto que la integral representa elárea limitada por la curva F(t), el eje de tiempos(abscisas) y las ordenadas extremas t=t1 y t=t2, elvalor medio ⟨F(t)⟩ puede interpretarse como laaltura de un rectángulo cuya base es Δt=t2-t1 y cuyaárea es igual a la anteriormente citada.
Cuando la función F(t) sea periódica, de periodoT, estaremos interesados normalmente en el valor medio de la función en un intervalo de tiempoque corresponda a un periodo. Entonces podemos escribir
⟨F(t)⟩ 1T⌡⌠
T
0
F(t) dt
Calcularemos ahora el valor medio de la función sen2ωt:
⟨sen2ω t⟩ 1T⌡⌠
T
0
sen2ω t dt 1T⌡⌠
T
0
1 cos 2ω t2
dt 1T
⎡⎢⎣
⎤⎥⎦
t2
sen 2ω t4ω
2πω
0
12
y análogamente se encuentra que
C
M
Y
CM
MY
CY
CMY
K
Acr4F1.pdf 04/11/2006 02:35:13
Figura 13.8
⟨cos2ω t⟩ 12
Llegaremos al mismo resultado de una formamás sencilla, sin necesidad de resolver integralalguna, si partimos de la identidad trigonométrica:
sen2ω t cos2ω t 1
Entonces, al tomar valores medios en un intervalode tiempo T=2π/ω, tenemos
⟨sen2ω t⟩ ⟨cos2ω t⟩ 1
y puesto que la única diferencia que existe entre las funciones seno y coseno es la referente a unaconstante de fase de π/2 rad, deberá ser
⟨sen2ω t⟩ ⟨cos2ω t⟩ 12
Dejamos el cuidado del alumno demostrar las relaciones siguientes, con m≠n:
⟨sen mω t⟩ 0 ⟨cos mω t⟩ 0

§13.6.- Energías cinética y potencial medias. 375
⟨sen mω t sen nω t⟩ 0 ⟨sen mω t cos nω t⟩ 0 ⟨cos mω t cos nω t⟩ 0
⟨sen2nω t⟩ 12
⟨cos2nω t⟩ 12
de modo que:
la energía total de un oscilador armónico simple es proporcional al cuadradode la amplitud de las oscilaciones.
Calcularemos ahora los valores medios temporales de las energías cinética ypotencial del oscilador armónico simple:
[13.40]
⎧⎪⎪⎨⎪⎪⎩
⟨Ek⟩12
mω 2A 2 ⟨cos2(ω t ψ)⟩ 14
mω 2A 2
⟨Ep⟩12
kA 2 ⟨sen2(ω t ψ)⟩ 14
kA 2
Vemos claramente7 que los valores medios
Figura 13.9
de las energías cinética y potencial del osciladorarmónico simple son iguales:
[13.41]⟨Ek⟩ ⟨Ep⟩12
E
Obsérvese que <E>=E, ya que la energía totales una constante del movimiento8. La igualdadentre los valores medios de las energíascinéticas y potencial es una propiedad especialdel oscilador armónico simple, propiedad que no se mantiene, en general, para lososciladores anarmónicos.
§13.7. Oscilaciones en las proximidades del equilibrio.- Hemos visto queel movimiento armónico simple es generado por una fuerza del tipo F=-kx, asociadaa una energía potencial Ep=kx2/2, midiéndose x a partir de la posición de equilibrio,que hemos supuesto en x=0. Supongamos ahora que la posición de equilibrio seencuentra en un punto de abscisas x0, en lugar de en el origen; será:
[13.42]Ep
12
k (x x0)2
7 Recordemos que k = mω2 (expr. [13.22]).
8 El lector llegará fácilmente al mismo resultado [13.41] por aplicación directa del teorema delvirial para una partícula en un campo conservativo, como se explicó en §10.9.
376 Lec. 13.- Movimiento armónico simple.
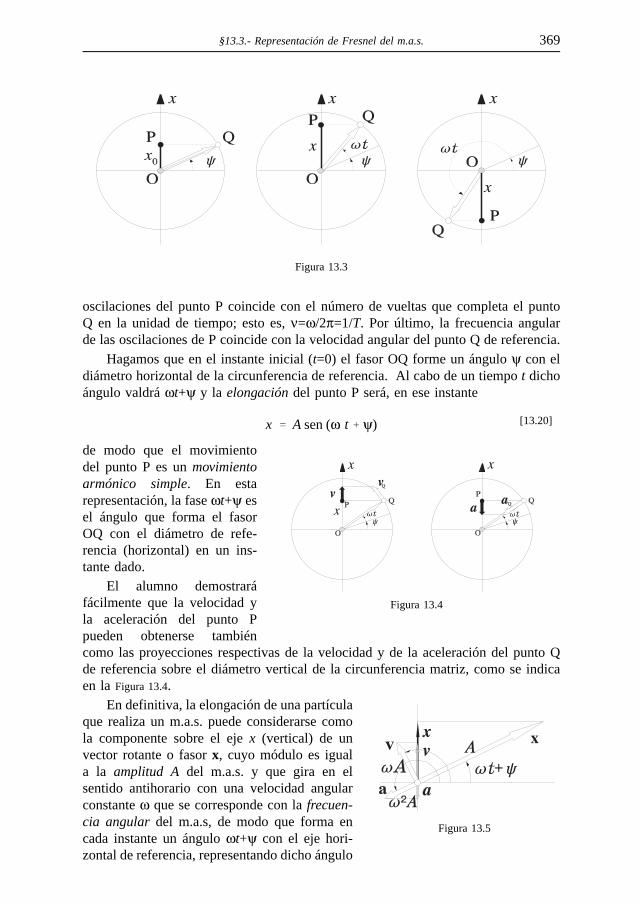
La representación gráfica de esta energía potencial, en función de x, es una
Figura 13.10
parábola de eje vertical con su vértice en el punto x0. Si la energía total del osciladores E>0, como se indica en la Figura 13.10, la recta E=cte interseca a la curva deenergía potencial Ep(x) en dos puntos, P1 y P2, cuyas abscisas x1 y x2, colocadas simé-tricamente respecto a x0, constituyen los límites de oscilación (puntos de retroceso).La fuerza que actúa sobre la partícula es
[13.43]FdEp
dxk (x x0)
siendo nula en el punto x0, que corres-ponde a la posición de equilibrio esta-ble, ya que en el presenta su valormínimo la energía potencial. Calcule-mos la segunda deriva de Ep(x) conrespecto a x:
[13.44]d2Ep
dx 2k >0
lo que nos permite escribir para lafrecuencia angular de las oscilacionesarmónicas simples
[13.45]ω km
1m
d2Ep
dx 2
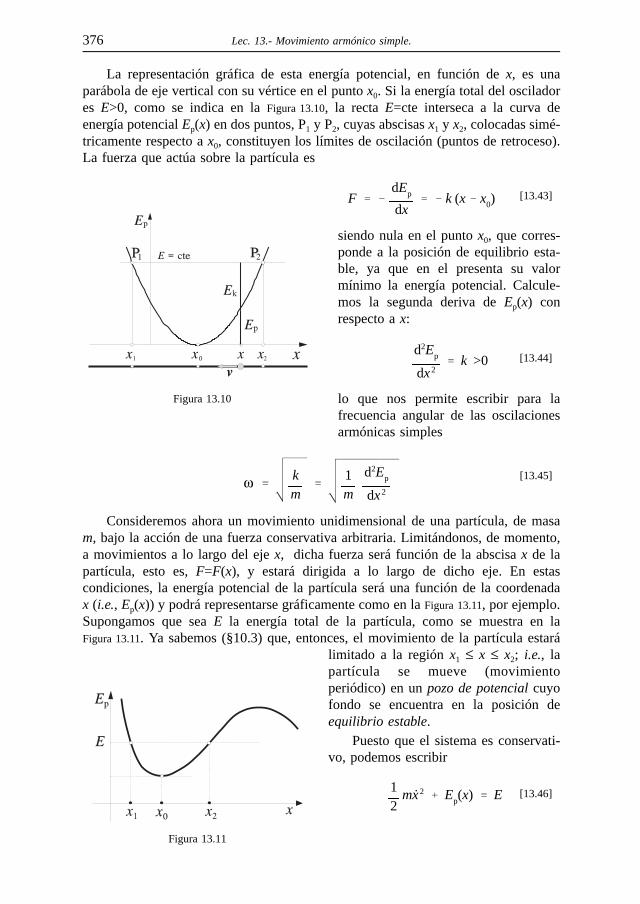
Consideremos ahora un movimiento unidimensional de una partícula, de masa
Figura 13.11
m, bajo la acción de una fuerza conservativa arbitraria. Limitándonos, de momento,a movimientos a lo largo del eje x, dicha fuerza será función de la abscisa x de lapartícula, esto es, F=F(x), y estará dirigida a lo largo de dicho eje. En estascondiciones, la energía potencial de la partícula será una función de la coordenadax (i.e., Ep(x)) y podrá representarse gráficamente como en la Figura 13.11, por ejemplo.Supongamos que sea E la energía total de la partícula, como se muestra en laFigura 13.11. Ya sabemos (§10.3) que, entonces, el movimiento de la partícula estará
limitado a la región x1 ≤ x ≤ x2; i.e., lapartícula se mueve (movimientoperiódico) en un pozo de potencial cuyofondo se encuentra en la posición deequilibrio estable.
Puesto que el sistema es conservati-vo, podemos escribir
[13.46]12
mx 2 Ep(x) E

§13.7.- Oscilaciones en las proximidades del equilibrio. 377
y la velocidad de la partícula puede expresarse en función de la abscisa x en la forma
[13.47]x dxdt
2
m[E Ep(x)]
El periodo del movimiento en un pozo de potencial puede obtenerse porintegración de la ecuación anterior:
[13.48]T ⌡⌠
T
0
dt m2
dx
E Ep(x)
donde la integración se extenderá a un ciclo completo del movimiento. Puesto queel movimiento es simétrico (se emplea el mismo tiempo en recorrer la anchura delpozo de izquierda a derecha que de derecha a izquierda), el periodo T será igual aldoble del tiempo de tránsito entre los puntos x=x1 y x=x2; esto es9,
[13.49]T 2m ⌡⌠
x2
x1
dx
E Ep(x)
donde los puntos de retorno, x1 y x2, se obtendrán resolviendo la ecuación Ep(x)=E.Dejamos al cuidado del alumno demostrar que, para el caso de una energía potencial de la
forma Ep=k(x-x0)2/2, el periodo del movimiento, calculado a partir de [13.49] es
[13.50]T 2π mk
es decir, el mismo que corresponde a un m.a.s. y que resulta ser independiente del valor de laenergía total E, lo que equivale a decir que es independiente de la amplitud de las oscilaciones(isocronismo).
En el caso general, en el que la energía potencial sea una función arbitraria dela posición x de la partícula, el movimiento en el interior del pozo de potencial seráperiódico, pero no será armónico simple, y el periodo T será una función de laenergía total E de la partícula y, por ende, de la "amplitud" de las oscilaciones, nosiendo simétrico el movimiento con respecto a la posición de equilibrio. Esta es unasituación que encontraremos frecuentemente en los sistemas físicos reales y da comoresultado un movimiento oscilatorio anarmónico. En todo caso, la frecuencia, o elperiodo, de las oscilaciones podrá calcularse, al menos en principio, a partir de laexpresión [13.49].
Si la energía total de la partícula es tan sólo ligeramente superior que la energíapotencial correspondiente a la posición de equilibrio, las oscilaciones alrededor dedicha posición de equilibrio pueden considerarse como armónicas simples. Veamosque, en efecto, es así.
9 Obsérvese que en [13.49] tenemos una integral impropia (el integrando se hace infinito enlos límites de integración, x1 y x2); sin embargo, en el terreno físico la integral debe existir para unapartícula que se mueva enteramente dentro de un pozo de potencial.

378 Lec. 13.- Movimiento armónico simple.
Recordemos que dada una función arbitraria f(x), el teorema de Taylor nospermite desarrollarla como una serie de potencias:
[13.51]f(x) f(x0)⎛⎜⎝
⎞⎟⎠
dfdx 0
(x x0)12!
⎛⎜⎜⎝
⎞⎟⎟⎠
d2f
dx 20
(x x0)2 1
3!
⎛⎜⎜⎝
⎞⎟⎟⎠
d3f
dx 30
(x x0)3 ...
donde el subíndice "0" (cero) significa que las derivadas se avalúan en el punto x0.Aplicando el teorema de Taylor a la función energía potencial Ep(x), y teniendo encuenta que (dEp/dx)0=0, por corresponder el punto x=x0 a un mínimo de la energíapotencial, tenemos
Ep(x) Ep(x0)12
⎛⎜⎜⎝
⎞⎟⎟⎠
d2Ep
dx 20
(x x0)2 1
6
⎛⎜⎜⎝
⎞⎟⎟⎠
d3Ep
dx 30
(x x0)3 ...
[13.52]Ep(x0)12
k (x x0)2 1
6k3 (x x0)
3 ...
donde hemos puesto, para abreviar,
[13.53]k⎛⎜⎜⎝
⎞⎟⎟⎠
d2Ep
dx 20
k3
⎛⎜⎜⎝
⎞⎟⎟⎠
d3Ep
dx 30
...
El primer término, Ep(x0), en el desarrollo en serie de potencias de la energíapotencial Ep(x), es constante y representa simplemente una elección arbitraria en elcero de energía potencial; podemos prescindir de este término sin que ello afecte alos resultados físicos. El segundo término es justamente el término cuadrático quecorresponde a un oscilador armónico simple, con k definido como en [13.53]. Lostérminos restantes son los responsables de la anarmonicidad, y reciben el nombre detérminos anarmónicos.
Si la energía total E de la partícula es tan sólo ligeramente superior a Ep(x0), laamplitud de las oscilaciones será pequeña. Así, si nos limitamos a considerarpequeños desplazamientos respecto a la posición de equilibrio estable x=x0, podremosdespreciar los términos de [13.52], que contienen (x-x0)
3, (x-x0)4, ... y potencias
superiores de (x-x0). Retendremos, entonces, solamente los dos primeros términos de[13.52], en el supuesto de que sea k≠0, y escribiremos
[13.54]Ep(x) ≈ Ep(x0)12
k (x x0)2
En consecuencia, para pequeñas oscilaciones en torno a cualquier mínimo de energíapotencial Figura 13.12, salvo para el caso excepcional k=0, el movimiento es el de unoscilador armónico simple, cuya frecuencia angular es
[13.55]ω k
m1m
⎛⎜⎜⎝
⎞⎟⎟⎠
d2Ep
dx 20

§13.7.- Oscilaciones en las proximidades del equilibrio. 379
La aproximación anterior es acep-
Figura 13.12
table en muchas situaciones reales, y enella radica la gran importancia deloscilador armónico simple. La mayoríade los problemas en los que intervienensistemas oscilantes se reducen al deloscilador armónico simple cuando sonsuficientemente pequeñas las amplitu-des de oscilación. Para amplitudesmayores, la aproximación no es acepta-ble, y el valor de la frecuencia angularcalculado mediante [13.55] discreparánotablemente, en general, del valor real; en este caso, la aproximación armónicasimple al problema no es adecuada, y deberá tomarse en cuenta el efecto de lostérminos anarmónicos.
Consideremos ahora la fuerza correspondiente a la energía potencial Ep(x) dadapor [13.52]; tenemos
[13.56]F(x)dEp
dxk (x x0)
12
k2 (x x0)2 ...
Si nos limitamos a considerar pequeños desplazamientos de la partícula respecto ala posición de equilibrio x=x0, podemos escribir la relación aproximada
[13.57]F k (x x0)
conocida como ley de Hooke, que no es sino un caso especial de una relación másgeneral [13.56] en el fenómeno de la deformación de los cuerpos elásticos.
La ley de Hooke implica una relación lineal entre la deformación y la fuerza recuperadora (o
Figura 13.13
deformadora). Los muelles y otros sistemas elásticos, así como los sólidos en general, obedecen esta "ley"con tal que las deformaciones no sean demasiado grandes. Si se deforma un sólido más allá de un ciertogrado, llamado límite elástico, no recuperará su forma y tamaño originales cuando deje de actuar la fuerzaaplicada. Cuando se sobrepasa el límite elástico y comienza el flujo plástico, la fuerza depende de un modocomplicado de factores muy diversos, incluyendo la velocidad de deformación y la historia previa delsistema deformable (histéresis), y no puede especificarse mediante una energía potencial. Estudiaremos conmás profundidad estas cuestiones en una lección posterior.
Resumiendo, podemosafirmar que siempre que unapartícula, o un sistema defor-mable, en general, se separa desu posición o configuración deequilibrio estable, se originaránoscilaciones armónicas simplessi los desplazamientos sonsuficientemente pequeños, puesentonces puede considerarselineal la relación existenteentre la elongación y la fuerzarecuperadora. En la Figura 13.13

380 Lec. 13.- Movimiento armónico simple.
hemos representado gráficamente la fuerza correspondiente a la función de energíapotencial representada en la Figura 13.12. Los puntos de abscisa x0 y x1 correspondena las posiciones de equilibrio estable e inestable, respectivamente; en ambas posi-ciones es nula la fuerza. Hemos ampliado el entorno del punto x0 para poder apreciarque existe una relación lineal aproximada entre F y (x-x0), tal como se expresa en laley de Hooke, si el entorno de x0 es suficientemente pequeño.
§13.8. Sistema masa-muelle.- El sistema masa-muelle constituye el paradigma
Figura 13.14
de las oscilaciones de los sistemas mecánicos. Consideremos el sistema constituidopor un muelle con uno de sus extremos fijo y con el otro unido a un cuerpo, de masam, que puede resbalar sobre una superficie horizontal lisa (Figura 13.14). La posiciónde equilibrio de la masa es O, y corresponde a la ausencia de tensión (tensora ocompresora) en el muelle; tomaremos dicha posición como origen de abscisas.
Supongamos que desplazamos lamasa de su posición de equilibrio yque después la abandonamos; elsistema comenzará a oscilar. En elinstante en que la masa tenga unaelongación x, la fuerza que actúasobre ella es
[13.58]F kx
ya que la fuerza es proporcional a laelongación (=deformación delmuelle) y está dirigida hacia laposición de equilibrio (fuerza
recuperadora). La constante k es la llamada constante elástica o recuperadora, y semide en newtons por metro (N/m) en el S.I.. El valor recíproco de la constanteelástica, 1/k, recibe el nombre de sensibilidad del muelle, y se mide en metros pornewton (m/N). Podemos clasificar los muelles en blandos (muy sensibles) y duros(poco sensibles).
La segunda ley de Newton, aplicada a la masa m, nos permite escribir
[13.59]F kx mx
o sea [13.60]mx kx 0
que es la ec. dif. del m.a.s., con una pulsación o frecuencia angular dada por
[13.61]ω km
El movimiento del sistema es armónico simple. Debemos destacar que la frecuenciade las oscilaciones del sistema masa-muelle queda definida en todos los casos por losvalores de m (característica inercial) y k (característica elástica). Sin embargo, lasotras dos constantes (A,ψ) que intervienen en la ecuación del m.a.s. x=A sen(ωt+ψ)deberán calcularse, en cada caso, a partir de las condiciones iniciales (x0,v0).
§13.8.- Sistema masa-muelle. 381
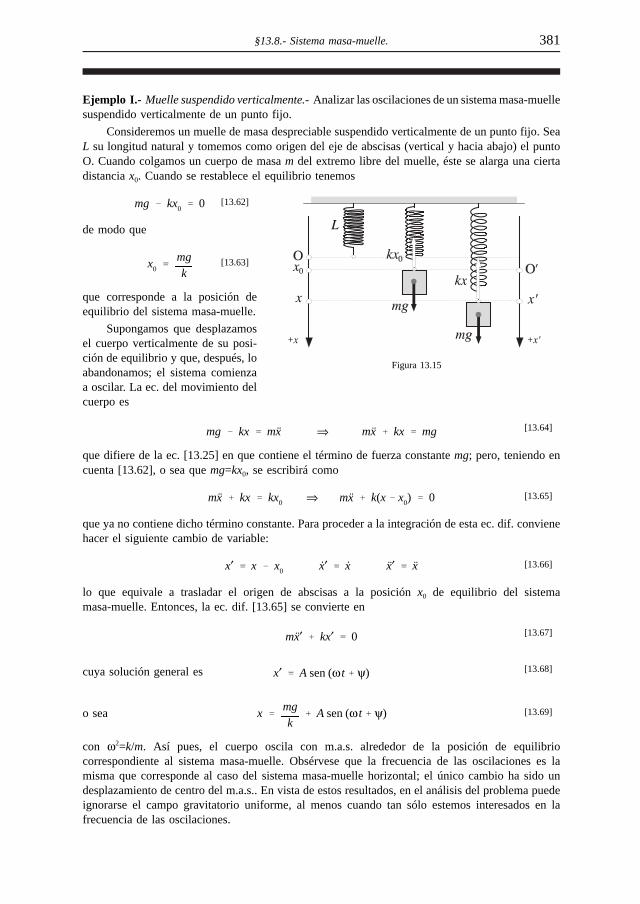
Ejemplo I.- Muelle suspendido verticalmente.- Analizar las oscilaciones de un sistema masa-muellesuspendido verticalmente de un punto fijo.
Consideremos un muelle de masa despreciable suspendido verticalmente de un punto fijo. SeaL su longitud natural y tomemos como origen del eje de abscisas (vertical y hacia abajo) el puntoO. Cuando colgamos un cuerpo de masa m del extremo libre del muelle, éste se alarga una ciertadistancia x0. Cuando se restablece el equilibrio tenemos
Figura 13.15
[13.62]mg kx0 0
de modo que
[13.63]x0
mgk
que corresponde a la posición deequilibrio del sistema masa-muelle.
Supongamos que desplazamosel cuerpo verticalmente de su posi-ción de equilibrio y que, después, loabandonamos; el sistema comienzaa oscilar. La ec. del movimiento delcuerpo es
[13.64]mg kx mx ⇒ mx kx mg
que difiere de la ec. [13.25] en que contiene el término de fuerza constante mg; pero, teniendo encuenta [13.62], o sea que mg=kx0, se escribirá como
[13.65]mx kx kx0 ⇒ mx k(x x0) 0
que ya no contiene dicho término constante. Para proceder a la integración de esta ec. dif. convienehacer el siguiente cambio de variable:
[13.66]x′ x x0 x′ x x′ x
lo que equivale a trasladar el origen de abscisas a la posición x0 de equilibrio del sistemamasa-muelle. Entonces, la ec. dif. [13.65] se convierte en
[13.67]mx′ kx′ 0
cuya solución general es [13.68]x′ A sen (ω t ψ)
o sea [13.69]x mgk
A sen (ω t ψ)
con ω2=k/m. Así pues, el cuerpo oscila con m.a.s. alrededor de la posición de equilibriocorrespondiente al sistema masa-muelle. Obsérvese que la frecuencia de las oscilaciones es lamisma que corresponde al caso del sistema masa-muelle horizontal; el único cambio ha sido undesplazamiento de centro del m.a.s.. En vista de estos resultados, en el análisis del problema puedeignorarse el campo gravitatorio uniforme, al menos cuando tan sólo estemos interesados en lafrecuencia de las oscilaciones.

382 Lec. 13.- Movimiento armónico simple.
Ejemplo II.- Sistema con dos muelles.- En el sistema que se representa en la Figura 13.16, los
C
M
Y
CM
MY
CY
CMY
K
Acr4F2.pdf 04/11/2006 02:37:36
Figura 13.16
muelles tienen constantes elásticas y longitudes naturales (k1,l1) y (k2,l2) y están conectados, cadauno por un lado, a un bloque de masa m, de tal modo que ambos están tensados (i.e., L1+L2 >l1+l2).Determinar la constante elástica equivalente del sistema y la frecuencia angular de sus oscilaciones.
Método de Newton:Comenzaremos estableciendo la condición de equilibrio
(figura superior); i.e., la igualdad de las tensiones en los dosmuelles:
[13.70]k1(L1 l1) k2(L2 l2) 0
Imaginamos el sistema en oscilación y escribimos la ec.del movimiento para el bloque cuando presenta unaelongación x (figura inferior):
[13.71]k1(L1 x l1) k2(L2 x l2) mx
que una vez ordenada y teniendo en cuenta la condición[13.70] queda en la forma
[13.72]mx (k1 k2) x 0
de modo que[13.73]
keq k1 k2 ωkeq
m
k1 k2
m
Método de la energía:Método de la energía potencial.- Si solamente estamos interesados en determinar el valor de
la constante elástica del sistema, expresamos la energía potencial del sistema en función de laelongación x; i.e.,
[13.74]Ep
12
k1(L1 x l1)2 1
2k2(L2 x l2)
2
En la posición de equilibrio (x=0), la energía potencial presentará un mínimo; i.e.,
[13.75]⎡⎢⎢⎣
⎤⎥⎥⎦
dEp
dx x 0
k1 (L1 x l1) k2 (L2 x l2) x 0k1 (L1 l1) k2 (L2 l2) 0
que es la misma relación [13.70]. La expr. [13.44] nos permite calcular la constante elástica delsistema a partir de la expr. [13.75] ; i.e.,
[13.76]d2Ep
dx 2k1 k2 keq
Método de la energía total.- Para determinar la ec. dif. del movimiento, expresaremos laenergía total del sistema en un instante genérico, cuando es x la elongación; i.e.,
[13.77]E 12
mx 2 12
k1(L1 x l1)2 1
2k2(L2 x l2)
2 cte.
que permanece constante (sistema conservativo). Derivando esta expresión respecto al tiempo,

§13.8.- Sistema masa-muelle. 383
[13.78]dEdt
mx x k1(L1 x l1) x k2(L2 x l2) x 0
ordenando y teniendo en cuenta la condición [13.75] tenemos
[13.79]x [ mx (k1 k2) x ] 0
y, puesto que x no es siempre nulo, deberá ser
[13.80]mx (k1 k2) x 0
que es la misma ec. dif. del movimiento [13.72] obtenida por el método anterior, que nos conduceal mismo resultado [13.73] que antes.
Obsérvese que la frecuencia de las oscilaciones del sistema no depende ni de las longitudesnaturales de los muelles (l1, l2), ni de sus tensiones en el equilibrio (definidas por L1 y L2), por loque pudiéramos haber ignorado dichos parámetros (considerarlos nulos), al menos si tratamos conmuelles extensores-compresores.
Ejemplo III.- Pequeñas oscilaciones.- Calcular la frecuencia de las pequeñas oscilaciones
Figura 13.17
transversales del sistema representado en la Figura 13.17. Los dos muelles son idénticos, deconstante elástica k y longitud natural l0 cada uno de ellos y están sometidosa una tensión F0 en la posición de equilibrio.
Resultará conveniente expresar la longitud L en función de la tensiónde equilibrio; esto es
k (L l0) F0 → L l0
F0
k
Escribiremos la expresión de la energía potencial (elástica) correspondientea una elongación transversal x; i.e.,
Ep k L 2 x 2 l0
2
y la derivaremos dos veces sucesivas respecto de la elongación ...
dEp
dx2k L 2 x 2 l0
x
L 2 x 2
2kx2kl0 x
L 2 x 2
d2Ep
dx 22k 2k l0
L 2 x 2 x 2
L 2 x 2
L 2 x 22k 2k l0
L 2
( L 2 x 2 )3/22k
⎛⎜⎜⎝
⎞⎟⎟⎠
1l0 L 2
(L 2 x 2 )3/2
de modo que, de acuerdo con la expr. [13.53a], será
keq
⎛⎜⎜⎝
⎞⎟⎟⎠
d2Ep
dx 20
2k⎛⎜⎜⎝
⎞⎟⎟⎠
1l0
L2k
L l0
L

384 Lec. 13.- Movimiento armónico simple.
o bien, en función de la tensión F0, keq
2 F0
L
de modo que la frecuencia de las oscilaciones transversales de la masa m será
ωkeq
m
2 F0
mL
En los análisis anteriores del sistema masa-muelle hemos considerado los muellescomo si no presentasen inercia (masa) y actuasen solamente como un "almacén" deenergía potencial. Las características inerciales y elásticas, esenciales para que seproduzcan las oscilaciones, estaban asociadas a elementos bien diferenciados. Estopuede se una buena aproximación en muchos casos, pero en otros la masa del muellepuede jugar un papel importante.
Ejemplo IV.- Muelle que tiene masa no despreciable.- Consideremos un cuerpo de masa m unidoa un muelle de masa M, como en la Figura 13.18. Sea k la constante elástica del muelle. ¿En quédiferirá el periodo de las oscilaciones de este sistema del que se tendría si el muelle no tuviesemasa?
Intuitivamente podemos predecir que el periodo de las oscilaciones será tanto mayor cuantomayor sea la masa del muelle. Pudiéramos estar tentados a sustituir en [13.61] m por m+M, alefecto de calcular la frecuencia angular del sistema. Pero el problema no es tan simple, dado queno todas las secciones del muelle oscilan con la misma amplitud. La amplitud del extremos fijo esnula, en tanto que la del extremo unido a la masa m es igual a la de ésta.
Podemos abordar el problema de un modo sencillo y razonable suponiendo que las diferentessecciones del muelle experimentan desplazamientos proporcionales a su distancia al extremo fijo,como se indica en la Figura 13.18. De este modo podremos calcular la energía cinética total delmuelle cuando su extremo móvil presente una elongación x.
Sea L la longitud natural del muelle
Figura 13.18
y consideremos un elemento infinitesimaldel mismo, de longitud dl, situado a unadistancia l del extremo fijo (O ≤ l ≤ L).La masa de ese elemento infinitesimal es
[13.81]dM ML
dl
y su elongación ξ, cuando es x la elonga-ción del extremo móvil, es la fracción l/L
de x, i.e., .ξ xL
l lL
x
La velocidad del elemento infinitesimal dM, en cada instante, puede expresarse en función desu distancia l al extremo fijo y de la velocidad v y que tenga en ese instante el extremo móvil delmuelle:
[13.82]vldξdt
ddt⎛⎜⎝
⎞⎟⎠
lL
x lL
dxdt
lL
v

§13.8.- Sistema masa-muelle. 385
de modo que la energía cinética de ese elemento infinitesimal es
[13.83]dEk
12
dM v 2l
12
Mv 2
L 3l 2dl
y la energía cinética total del muelle, en el instante en que es v la velocidad de su extremo móvil,viene dada por la expresión
[13.84]Ek,M12
Mv 2
L 3 ⌡⌠
L
0
l 2dl 12⎛⎜⎝
⎞⎟⎠
M3
v 2
energía que equivale a la de un cuerpo cuya masa fuese la tercera parte de la del muelle y que semoviese con la velocidad del cuerpo que está unido a su extremo móvil. El teorema deconservación de la energía para el sistema completo (cuerpo-muelle) nos permite poner
[13.85]E 12
mv 2 12
M3
v 2 12
kx 2
o sea [13.86]E 12⎛⎜⎝
⎞⎟⎠
m M3
v 2 12
kx 2 12
meq v 2 12
kx 2
con [13.87]meq m M3
de modo que, derivando con respecto al tiempo e igualando a cero (sistema conservativo),obtenemos la ec. dif. del movimiento:
[13.88]dEdt
meqva kxv 0 ⇒ v (meqa kx) 0 ⇒ a kmeq
x 0
resultando que [13.89]ω kmeq
km M/3
lo que equivale a considerar un muelle ideal (sin masa) y sumar M/3 a la masa que lleva sujeta ensu extremo.
§13.9. Péndulo simple.- El péndulo simple o matemático es un sistema ideali-zado constituido por una partícula de masa m que está suspendida de un punto fijoO mediante un hilo inextensible y sin peso. Naturalmente es imposible la realizaciónpráctica de un péndulo simple, pero si es accesible a la teoría. El sistema que acaba-mos de describir se llama péndulo simple o matemático en contraposición a lospéndulos reales, compuestos o físicos, únicos que pueden construirse y cuyosmovimientos podemos observar.
Consideremos un péndulo simple, como el representado en la Figura 13.19. Si lapartícula se desplaza desde la posición de equilibrio (C) hasta la posición A, de modoque el hilo forma un ángulo θ con la vertical, y luego se abandona, el péndulooscilará en un plano vertical bajo la acción de la gravedad. Las oscilaciones tendránlugar entre las posiciones extremas A y A′, simétricas respecto a la vertical, a lo

386 Lec. 13.- Movimiento armónico simple.
largo de un arco de circunferencia de radio
Figura 13.19
l=OC. El movimiento es periódico, pero nopodemos asegurar que sea armónico.
Para determinar la naturaleza de lasoscilaciones deberemos escribir la ecuacióndel movimiento de la partícula. Lapartícula se mueve sobre un arco de cir-cunferencia bajo la acción de dos fuerzas:su propio peso (mg) y la tensión de lacuerda (T). Tan sólo el peso de la partículaproporciona una componente tangencial ala trayectoria, cuyo valor es
[13.90]Ft mg senθ
donde hemos incluido el signo negativo para manifestar que la fuerza Ft tienesiempre sentido opuesto al desplazamiento (fuerza recuperadora). La componentetangencial de la ecuación del movimiento, la única componente que nos interesa, esFt=mat, siendo at, la aceleración tangencial. Pero como el movimiento de la partículaes circular, podemos poner at=lθ y, por consiguiente, tenemos
[13.91]mg sen θ ml θ ⇒ θ gl
sen θ 0
Esta ec. dif. no es del mismo tipo que la correspondiente a un m.a.s., debido a
Tabla 13.1.- Comparación entre el valor de un ángulo (rad) y el de su seno.
θ θ (rad) sen θ dif.(%) θ θ (rad) sen θ dif.(%)
0° 0.00000 0.00000 0.00 15° 0.26180 0.25882 1.15
2° 0.03491 0.03490 0.02 20° 0.34907 0.34202 2.06
5° 0.08727 0.08716 0.13 25° 0.43633 0.42262 3.25
10° 0.17453 0.17365 0.51 30° 0.52360 0.50000 4.72
la presencia de la función seno, de modo que podemos asegurar que el movimientodel péndulo simple no es armónico simple, en general. Sin embargo, si consideramostan sólo oscilaciones de pequeña amplitud, de modo que el ángulo θ sea siempresuficientemente pequeño, entonces el valor del senθ será muy próximo al valor deθ expresado en radianes (senθ≈θ, para θ suficientemente pequeño), como podemosapreciar en la Tabla 13.1, y la ec. dif. del movimiento se reduce a
[13.92]θ glθ 0
que es idéntica a la ec. dif. correspondiente al m.a.s., refiriéndose ahora al movimien-to angular en lugar de al movimiento rectilíneo, cuya solución es:

§13.9.- Péndulo simple. 387
[13.93]θ Θ sen (ω t ψ)
con[13.94]ω g
l⇒ T 2π l
g
donde Θ y ψ son dos constantes "arbitrarias" correspondientes a la amplitud angular
Figura 13.20Christian HUYGENS (1629-1695)
y a la fase inicial del movimiento. Obsérvese que el periodo del péndulo simple esindependiente de la masa de la partícula suspendida y, también, de la amplitud de lasoscilaciones, siempre que éstas sean suficientemente pequeñas como para que laaproximación senθ≈θ sea aceptable. Esta última propiedad, conocida comoisocronismo de las pequeñas oscilaciones, fue descubierta por GALILEO (1564-1642),hacia el año 1581, en la catedral de Pisa:
"Un día en que asistía, algo distraído sin duda, a una ceremonia religiosa, fijó su mirada en unalámpara de bronce, obra maestra de Benvenuto Cellini, que, suspendida de una larga cuerda,oscilaba con lentitud ante el altar. Quizás, con los ojos fijos en aquel metrónomo improvisado,unió su voz a la de los celebrantes; la lámpara se detuvo poco a poco y, atento Galileo a susúltimos movimientos, observó que marcaba siempre el mismo compás".
(J. BERTRAND: Galileo y sus trabajos.)
Esta última circunstancia fue la que másatrajo la atención de Galileo; a pesar de que laamplitud de las oscilaciones se iba reduciendo,permanecía sensiblemente constante la duraciónde las mismas. Galileo repitió muchas veces elexperimento y acabó por descubrir la relaciónexistente entre dicha duración y la longitud dela cuerda que soportaba al peso oscilante. Másadelante, hacia el año 1673, Christian HUY-GENS10 encontró la expresión del periodo co-rrespondiente a las oscilaciones de pequeñaamplitud, basando su demostración en las leyesde caída de los graves, según las había enuncia-do Galileo. Puesto que las pequeñas oscilacionesdel péndulo son isócronas, este dispositivo esútil para la medida del tiempo11.
10 Christian HUYGENS (1629-1695), astrónomo, matemático y físico holandés, nacido en LaHaya. Sus numerosos y originales descubrimientos científicos le valieron un amplio reconocimientoentre los científicos del siglo XVII.
11 Fue Huygens quién en 1657 presentó a los Estados de Holanda un reloj regulado porpéndulo; al año siguiente publicó una obra sobre tan importante aplicación. En el año 1673 aparecióel admirable tratado De horlogio oscillatorio ex Christiano Huygenio, en el que se demuestran laspropiedades del isocronismo de las pequeñas oscilaciones del péndulo, y de las del péndulocicloidal, asunto que trataremos más adelante.

388 Lec. 13.- Movimiento armónico simple.
El péndulo simple se utilizó en las primeras determinaciones precisas de laaceleración producida por la gravedad, debido a que tanto el periodo de lasoscilaciones como la longitud de la cuerda pueden determinarse con facilidad. Apartir de [13.94] podemos expresar g en función de T y de l; i.e.,
[13.95]g 4π 2 lT2
§13.10. Solución exacta del problema del péndulo.- Los primeros estudiosacerca de las oscilaciones pendulares finitas fueron realizadas por el matemático suizo LeonhardEULER (1707-1783) hacia el año 1736. Para obtener la expresión general del periodo de lasoscilaciones pendulares deberemos proceder a integrar la ec. dif. del movimiento [13.91] de la masapendular. Sin embargo, puesto que el sistema es conservativo, el problema puede resolverse másfácilmente por medio de la integral de la energía.
La energía potencial gravitatoria de la masa pendular m, referida al plano horizontal que pasapor el punto más bajo de su trayectoria (C), viene dada por
[13.96]Ep mgh mgl (1 cosθ) 2mgl sen2 θ2
y la energía total E es
Figura 13.21
[13.97]12
ml 2θ22mgl sen2 θ
2E
En la Figura 13.22 hemos representado gráfi-camente la energía potencial Ep en función delángulo θ. Podemos observar, en dicha gráfica, quepara 0<E<2mgl el movimiento es oscilatorio, ya quetiene lugar enteramente dentro de un pozo depotencial. Dicho movimiento oscilatorio será armó-nico simple cuando E sea tan sólo ligeramentesuperior que cero. Cuando la energía total E sea ma-yor que 2mgl, el movimiento ya no será oscilatorio,
sino circular; el ángulo θ aumenta (o disminuye) de modo continuo, mientras que la velocidadangular θ varía entre un valor máximo (correspondiente al fondo de los pozos de potencial) y unvalor mínimo (correspondiente a las cimas de las barreras de potencial). Físicamente, cuando E >2mgl, el péndulo tiene suficiente energía como para describir una circunferencia. (En este caso, elhilo deberá ser sustituido por una varilla rígida muy ligera, a menos que E sea suficientementegrande). El movimiento será periódico en cualquier caso, y procederemos a la resolución de la ec.[13.97] despejando el valor de θ; tenemos
[13.98]θ 2 g
lE
2mglsen2 θ
2
así que, el periodo del movimiento, oscilatorio o circular según sea el valor de E, vendrá dado por
[13.99]T ⌡⌠
T
0
dt 12
lg
dθ
E2mgl
sen2 θ2

§13.10.- Solución exacta del problema del péndulo. 389
extendiéndose la integración a un ciclo completo del movimiento.
Figura 13.22
Cuando el movimiento es oscilatorio (0<E<2mgl), el valor máximo de θ será Θ; en esaposición extrema, toda la energía de la masa pendular será puramente potencial, de modo que
[13.100]E 2mgl sen2 Θ2
y [13.99] se convierte en
[13.101]T 1
2lg
dθ
sen2 Θ2
sen2 θ2
y, puesto que el movimiento es simétrico, el periodo será cuatro veces el tiempo necesario para quela partícula oscile entre θ=0 y θ=Θ, de modo que
[13.102]T 2 lg ⌡
⌠Θ
0
dθ
sen2 Θ2
sen2 θ2
Tabla 13.2.- Periodo de oscilación «exacto» del péndulo simple para diversas amplitudes de oscilación.
θ T/T0 θ T/T0 θ T/T0 θ T/T0
0° 1.0000 20° 1.0076 40° 1.0313 100° 1.2322
2° 1.0001 22° 1.0093 44° 1.0381 110° 1.2953
4° 1.0003 24° 1.0193 48° 1.0457 120° 1.3729
6° 1.0007 26° 1.0131 52° 1.0541 130° 1.4693
8° 1.0012 28° 1.0152 56° 1.0632 140° 1.5945
10° 1.0019 30° 1.0174 60° 1.0132 150° 1.7737
12° 1.0027 32° 1.0199 70° 1.1021 160° 2.0075
14° 1.0038 34° 1.0225 80° 1.1375 170° 2.4393
16° 1.0049 36° 1.0253 90° 1.1804 180° ∞18° 1.0062 38° 1.0282

390 Lec. 13.- Movimiento armónico simple.
Transformaremos ésta integral en una forma típica introduciendo una variable auxiliar φ,definida por
[13.103]senφsen θ
2
sen Θ2
1K
sen θ2
con K sen Θ2
que toma los valores φ=0 y φ=π/2 en los límites de integración en [13.102]. Con estas sustituciones,y tras hacer algunas operaciones, el lector comprobará que la expresión [13.102] adopta la forma
[13.104]T 4 lg ⌡
⌠π2
0
dφ
1 K 2sen2φ
que corresponde a la forma típica de una integral elíptica completa de primera clase; la soluciónde esta integral puede encontrarse en obras especializadas y puede escribirse en la forma
[13.105]⌡⌠
π2
0
dφ
1 K 2sen2φ
π2
⎡⎢⎢⎣
⎤⎥⎥⎦
1 ⎛⎜⎝
⎞⎟⎠
12
2
K 2 ⎛⎜⎝
⎞⎟⎠
1 32 4
2
K 4 ⎛⎜⎝
⎞⎟⎠
1 3 52 4 6
2
K 6 ...
por lo que la expresión general del periodo T de las oscilaciones finitas del péndulo simple es
[13.106]T 2π l
g
⎡⎢⎢⎣
⎤⎥⎥⎦
1 ⎛⎜⎝
⎞⎟⎠
12
2
sen2 Θ2
⎛⎜⎝
⎞⎟⎠
1 32 4
2
sen4 Θ2
⎛⎜⎝
⎞⎟⎠
1 3 52 4 6
2
sen6 Θ2
...
Así pues, el periodo es función de la amplitud de las oscilaciones. En la Figura 13.23 hemos repre-
Figura 13.23
sentado gráficamente la variación de T (en unidades de ) en función de Θ, tomandoT0 2π l/gun número creciente de términos en la expresión[13.106]. Se observará que el periodo T difieresignificativamente del correspondiente a las oscila-ciones de pequeña amplitud (T0) cuando Θ>20°.Para valores de Θ suficientemente pequeños, la serie[13.106] converge muy rápidamente; en esascondiciones será suficiente tomar tan sólo el primertérmino correctivo e, incluso, sustituir senΘ/2 porΘ/2, de modo que tendremos
[13.107]T ≈ 2π l
g⎛⎜⎝
⎞⎟⎠
1 Θ2
16
donde Θ se expresará en radianes. Esta aproxima-ción resulta apropiada en gran parte de las situa-ciones que encontramos en la práctica; de hecho, lacorrección que introduce el término Θ2/16 represen-
ta menos de 0.2% para amplitudes inferiores a 10°. En la Tabla 13.2 se tabulan los valores delcociente T/T0 en función de la amplitud Θ de las oscilaciones, tomando como base la expresión[13.106].

§13.11.- Péndulo cicloidal. 391
§13.11. Péndulo cicloidal.- Las oscilaciones del péndulo simple sólo sonisócronas para pequeñas amplitudes. Sin embargo, existe un diseño especial en el queel periodo es independiente de la amplitud; se trata del péndulo cicloidal, llamado asíporque está basado en una propiedad de la curva geométrica llamada cicloide. Fuea Huygens a quien correspondió las primicias de este descubrimiento:
"El péndulo simple no puede ser considerado como una medida del tiempo segura y uniforme, porquelas oscilaciones amplias tardan más tiempo que las de menor amplitud; con ayuda de la geometría heencontrado un método, hasta ahora desconocido, de suspender el péndulo; pues he investigado lacurvatura de una determinada curva que se presta admirablemente para lograr la deseada uniformidad.Una vez que hube aplicado esta forma de suspensión a los relojes, su marcha se hizo tan pareja ysegura, que después de numerosas experiencias sobre la tierra y sobre el agua, es indudable que estosrelojes ofrecen la mayor seguridad a la astronomía y a la navegación. La línea mencionada es lamisma que describe en el aire un clavo sujeto a una rueda cuando ésta avanza girando; losmatemáticos la denominan cicloide, y ha sido cuidadosamente estudiada porque posee muchas otraspropiedades; pero yo la he estudiado por su aplicación a la medida del tiempo ya mencionada, quedescubrí mientras la estudiaba con interés puramente científico, sin sospechar el resultado."
Christian HUYGENS: Horologium oscillatorium (1673).
La cicloide es la curva generada
Figura 13.24
por un punto de una circunferencia querueda sobre una línea recta. Si en unplano vertical construimos una trayecto-ria cicloidal, de base horizontal y conla concavidad dirigida hacia arriba,como se muestra en la Figura 13.24, taltrayectoria es tautócrona para el puntoC; i.e., el tiempo que empleará unapartícula P en resbalar (bajo la acciónde la gravedad) hasta llegar a la posición de equilibrio estable C es independiente dela posición inicial de la partícula sobre la trayectoria cicloidal. Las oscilacionesalrededor de la posición de equilibrio son rigurosamente isócronas en una trayectoriacicloidal como la anteriormente descrita, y el periodo de las oscilaciones, que esindependiente de la amplitud de las mismas, viene dado por
[13.108]T 2π 4a
g
donde a es el radio de la circunferencia que genera la cicloide. Por consiguiente, el
C
M
Y
CM
MY
CY
CMY
K
Acr4F3.pdf 04/11/2006 02:39:57
Figura 13.25
péndulo rigurosamente isócrono deberáser tal que la masa pendular describauna trayectoria cicloidal (vide Proble-
ma 13.36).El péndulo cicloidal puede construirse (a
la manera de Huygens) suspendiendo el hiloentre dos contornos sólidos que tienen laforma de arcos de cicloide tangentes en supunto de unión Figura 13.25). Al oscilar elpéndulo, el hilo se ciñe a uno u otro de esosdos contornos cicloidales, y la longitud

392 Lec. 13.- Movimiento armónico simple.
efectiva del péndulo queda así disminuida en una proporción que depende de la amplitud de lasoscilaciones. Huygens demostró (vide Problema 13.37) que si la circunferencia que genera los doscontornos cicloidales tiene precisamente un radio que es la cuarta parte de la longitud del hilo desuspensión del péndulo (l=4a) entonces la masa pendular describe un arco de cicloide cuyacircunferencia generatriz tiene el mismo radio a. Un péndulo construido de acuerdo con estosprincipios es rigurosamente isócrono, y el periodo de sus oscilaciones es
[13.109]T 2π l
g
Problemas
13.1.- Una pelota rebota elásticamente una yotra vez sobre un suelo horizontal, alcanzandouna altura máxima h por encima del mismo.a) ¿Es periódico el movimiento de la pelota?En caso afirmativo, ¿cuáles son su periodo ysu frecuencia? b) ¿Es armónico simple elmovimiento de la pelota? Explíquese.
13.2.- Demostrar que el movimiento armónicosimple de una partícula puede describirse enfunción de las condiciones iniciales (x0,v0) porla ecuación
x(t) A sen(ω t ψ)v0
ωsenω t x0 cosω t
13.3.- El movimiento de un oscilador armónicosimple está descrito por la ecuación
x=5 sen (0.2t + 0.5236)
donde todas las cantidades están expresadas enel sistema c.g.s.. Determinar: a) la amplitud, elperiodo, la frecuencia y la fase inicial delmovimiento, b) la velocidad y la aceleración yc) las condiciones iniciales.
13.4.- Una partícula ejecuta un m.a.s. con unperiodo de 2 s. En el instante inicial (t=0) seencuentra a 3 cm del origen y se mueve conuna velocidad de 5 cm/s acercándose hacia elorigen. a) Escribir la ecuación del m.a.s. en lasformas Asen(ωt+ψ) y Acos(ωt+φ). b) De-terminar el valor máximo de la velocidad y dela aceleración de la partícula. c) Determinar laposición, velocidad y aceleración de la partí-
cula en los instantes t=0.5, 1.0, 1.5, 2.0 y3.0 segundos.
13.5.- Una partícula está realizando un movi-miento armónico simple rectilíneo; su veloci-dad máxima es de 80 cm/s y su aceleraciónmáxima es de 90 cm/s2. Encontrar la frecuen-cia y la amplitud de las oscilaciones.
13.6.- Las posiciones sucesivas de una partícu-la que ejecuta un m.a.s. son x=a, b y c;correspondientes a los instantes t=t0, 2t0, 3t0,respectivamente. Calcular el periodo delmovimiento.
13.7.- Dos partículas realizan sendos movi-mientos armónicos simples de la misma ampli-tud, frecuencia y origen a lo largo de unamisma línea recta. Cada vez que se cruzan,moviéndose en sentidos opuestos, sus elonga-ciones son la mitad de la amplitud. Calcular ladiferencia de fase entre ambos m.a.s.
13.8.- El movimiento en el plano xy de unapartícula de masa m viene descrito por lasecuaciones para métricas x=v0t, y=y0 cos ωt,donde t es el tiempo. a) Representar x e y enfunción del tiempo t. b) Representar gráfica-mente la trayectoria de la partícula. c) ¿Quétipo de movimiento realiza la partícula? d) Ex-presar la velocidad y la aceleración de lapartícula en función del tiempo. e) ¿Qué fuerzaactúa sobre la partícula?
13.9.- Una moneda permanece en reposo sobreuna plataforma horizontal que realiza unmovimiento armónico simple de amplitud A yfrecuencia v. a) Si la plataforma oscila verti-calmente, ¿cuál será el valor máximo de A que

Problemas 393
permita a la moneda permanecer en contactopermanente con la plataforma? b) Supongamosahora que la plataforma oscila horizontalmentey que sea μ el coeficiente de rozamientoestático entre la moneda y la plataforma. ¿Cuálserá, entonces, el valor máximo de A quepermita a la moneda permanecer en reposorespecto a la plataforma, sin deslizar?
13.10.- Una plataforma horizontal ejecuta unmovimiento armónico simple en direcciónvertical, con una frecuencia de 8/π Hz y unaamplitud de 10 cm. Cuando la plataforma seencuentra en el punto más bajo de su trayecto-ria, se coloca un pequeño cuerpo sobre ella.a) ¿En qué posición de la plataforma dejará elcuerpo de estar en contacto con ella? b) ¿Has-ta que altura ascenderá el cuerpo por encimade la posición más alta alcanzada por la plata-forma?
13.11.- Un bloque cúbico de madera, de aristaa y masa m, está flotando en un estanque. Loempujamos hacia abajo y después lo abando-namos; ¿cuál será la frecuencia de sus oscila-ciones?
13.12.- Hacer una estimación del periodo delas oscilaciones verticales de un buque enfunción de su calado. Hacer las simplificacio-nes que se consideren oportunas.
13.13.- Calcular el
C
M
Y
CM
MY
CY
CMY
K
Acr4F4.pdf 04/11/2006 02:43:05
Prob. 13.13
periodo de las oscila-ciones de la columnalíquida contenida en untubo en U de seccióntransversal constante,colocado verticalmente,como se muestra en lafigura.
13.14.- Calcular losvalores medios tempo-rales de la elongación,velocidad y aceleración del oscilador armónicosimple. Interprétense los resultados.
13.15.- a) Calcular el valor medio de la ener-gía potencial del oscilador armónico simplerespecto a la elongación. b) Ídem para laenergía cinética. c) Interpretar los resultadosanteriores.
13.16.- Del extremo libre de un muelle de15 g de peso, suspendido verticalmente, secuelga una pesa de 50 g; se mide un alarga-miento de 5 cm. A continuación, se añade otrapesa de 25 g y se deja que el sistema oscileverticalmente. ¿Cuál será la frecuencia de lasoscilaciones?
13.17.- La escala de un dinamómetro demuelle, que alcanza de 0 a 500 g, mide 8 cmde longitud. Del dinamómetro se suspende unpequeño paquete, se le da un tirón hacia abajoy se observa que sus oscilaciones verticalespresentan una frecuencia de 3 Hz. ¿Cuántopesa el paquete?
13.18.- Un bloque de masa m está unido a un
Prob. 13.18
muelle de constante elástica k de longitud l0.El conjunto está dispuesto sobre un planoinclinado liso, como se muestra en la figura.Determinar la posición de equilibrio del bloquey la frecuencia de sus oscilaciones.
13.19.- De-
Prob. 13.19
terminar lasfrecuenciasde oscilaciónco r r e spon -d i e n t e s acada uno delos sistemasrepresentadosen la figura.
13.20.- Te-nemos unmuelle ho-mogéneo del o n g i t u dnatural L yc o n s t a n t eelástica k.a) Lo corta-mos por la mitad, obteniendo así dos muellesidénticos. ¿Cuál es el valor de la constanteelástica de cada uno de ellos. b) ¿Ídem si locortamos en tres partes iguales? c) ¿Ídem si locortamos en dos piezas, cuyas longitudesnaturales sean L1 y L2, tales que L1 = nL2,siendo n un número natural?
13.21.- Disponemos de tres muelles idénticos.Los unimos en serie, uno a continuación deotro, y fijamos uno de los extremos libres altecho, en tanto que del otro extremo suspende-mos un bloque de masa m. Cuando duplicamosla masa suspendida, el extremo inferior delconjunto serie desciende una distancia adicio-

394 Lec. 13.- Movimiento armónico simple.
nal h. a) ¿Cuánto vale la constante elástica decada muelle? b) Con los tres muelles dispone-mos ahora un montaje paralelo (cada muelletiene un extremo unido al techo) y suspende-mos una masa 3 m. ¿Cuál será la frecuencia delas oscilaciones de este sistema?
13.22.- Consideremos un pequeño objeto, de
Prob. 13.22
masa m, que tan sólo puede moverse a lo largode una recta, unido a un extremo de un muellede constante elástica k y de longitud natural l0.El otro extremo del muelle está unido a unpunto fijo A situado a una distancia h > l0 dela recta sobre la que se mueve el pequeñoobjeto, como se muestra en la figura. Calcularla frecuencia de las pequeñas oscilaciones delsistema.
13.23.- a) Una cuerda vertical, de masa des-preciable y longitud l=60 cm, está tensada poruna fuerza de 5 kg. En el centro de la cuerdase fija una masa m=10 g. Calcular lafrecuencia de las oscilaciones del sistemacuando se separa transversalmente la masa unapequeña distancia («l) de su posición de equili-brio y después se abandona. b) Ídem cuando lamasa está situada a 20 cm de uno de losextremos de la cuerda tensa.
13.24.- Un reloj de péndulo que ha sidocuidadosamente ajustado para marcar el tiempocorrecto en un lugar donde g = 9.823 m/s2
retrasa 40 s por día cuando se lleva a otrolugar geográfico. ¿Cuánto vale g en ese lugar?
13.25.- Del techo de un vagón de ferrocarril secuelga un péndulo simple que bate segundoscuando el vagón está parado o se mueve conuna velocidad constante. Supongamos que elvagón se acelera horizontalmente cona0=3 m/s2; calcular el periodo de las pequeñasoscilaciones del péndulo alrededor de suángulo de equilibrio.
13.26.- Un reloj de péndulo está proyectado demodo que su funcionamiento correctocorresponda a unas oscilaciones de 10° deamplitud. Supongamos que la amplitud dedichas oscilaciones disminuya muy por debajode los 10°. ¿Qué error acumulado a lo largo deun día corresponde a esta situación?
13.27.- Un reloj de péndulo adelanta 6 minutospor día cuando la amplitud angular de susoscilaciones se hace muy pequeña. Calcular elvalor apropiado de la amplitud de las oscila-ciones del péndulo para que el reloj marchecorrectamente.
13.28.- Un bloque de madera de 500 g de pesoestá suspendido de un punto fijo mediante unhilo ligero de 1.5 m de longitud. Se disparahorizontalmente un proyectil, de 40 g de peso,que se incrusta en el bloque de madera. Comoconsecuencia del impacto, el bloque de maderacomienza a oscilar, con una amplitud sensible-mente superior a 30°, midiéndose con granprecisión el periodo de esas oscilaciones,resultando T=2.614 s. ¿Cuál era la velocidaddel proyectil?
13.29.- Una partícula de masa m desliza, sinrozamiento, por el interior de un casquetehemiesférico de radio R. a) Demostrar que elmovimiento de la partícula es el mismo que si
estuviese sujeta a un hilo de longitud R. b) Se
Prob. 13.29
abandonan, partiendo del reposo, dos partículasdesde las posiciones indicadas en la figura, cons2=2s1 mucho menores que R. ¿En qué puntochocarán las dos partículas?
13.30.- La energía potencial de una partículade masa m que se mueve a lo largo del eje xestá dada en función de su posición sobredicho eje en la forma siguiente:
x < 0 ; Ep 3Ep,0
0 <x <b ; Ep 0
b < x < 32
b ; Ep Ep,0
32
b <x ; Ep 2Ep,0
a) Representar gráficamente la función Ep(x) ydiscutir los movimientos posibles de la partí-cula en función de los valores que pueda tomarsu energía total E. b) Calcular el periodo deuna oscilación completa de la partículacorrespondiente a una energía totalE=Ep,0/2 c) Ídem para E=3 Ep,0/2.

Problemas 395
13.31.- Una partícula de masa m y energía
Prob. 13.31
total E se mueve en el interior de un pozo depotencial cuadrado, de altura Ep,0 y anchuraΔa, como se muestra en la figura. Cambiamosligeramente la energía potencial mediante laintroducción de una minúscula irregularidadcuadrada, de altura ΔU«E y anchura Δx en elfondo del pozo de potencial. Demostrar que elperiodo de las oscilaciones experimenta uncambio que vale aproximadamente
ΔT (Δx Δu) m2E 2
(Obsérvese que el efecto producido por lairregularidad depende simplemente del produc-to Δx Δu, y no de los valores individuales dedichas magnitudes).
13.32.- Calcular la frecuencia de las pequeñasoscilaciones alrededor de las posiciones deequilibrio de una partícula de masa m=1 g quese mueve a lo largo del eje x, estando definidasu energía potencial Ep (en ergios) por cadauna de las expresiones siguientes
a) Ep 24 x 2 e 2x
b) Ep
ax
b2x 2
donde a y b son constantes positivas.
13.33.- Calcular la frecuencia de las pequeñasoscilaciones correspondientes al potencialLENNARD-JONES (vide Prob. 10.23)
Ep Ep,0
⎡⎢⎢⎢⎣
⎤⎥⎥⎥⎦
⎛⎜⎜⎝
⎞⎟⎟⎠
r0
r
12
2⎛⎜⎜⎝
⎞⎟⎟⎠
r0
r
6
13.34.- Una partícula de masa m puede desli-zar (sin rozamiento) a lo largo de un carril quetiene forma parabólica, de eje vertical y con laconcavidad dirigida hacia arriba. Se abandona
la partícula en un punto del carril, situado auna altura H sobre el fondo del mismo.a) Demostrar que el periodo de lasoscilaciones de la partícula es
T 2π b 2Hg
⎡⎢⎢⎣1 ⎛
⎜⎝
⎞⎟⎠
12
2
K 2
⎛⎜⎝
⎞⎟⎠
1 32 4
2 K 4
3⎛⎜⎝
⎞⎟⎠
1 3 52 4 6
2 K 6
5⎤⎥⎥⎦
⎛⎜⎝
⎞⎟⎠
1 3 5 72 4 6 8
2 K 8
7...
con K 2H2H b
y siendo b el radio de curvatura de la parábolaen su vértice. b) Obtener la expresión delperiodo correspondiente a las oscilaciones depequeña amplitud e interpretar el resultado.
13.35.- Ecuaciones paramétricas de la cicloi-de. De acuerdo con la definición dada en eltexto, deducir las ecuaciones paramétricas dela cicloide.
13.36.- Una bolita de masa m está ensartada en
Prob. 13.36
un alambre liso, curvado en forma de cicloide,cuyas ecuaciones paramétricas son
x a (φ senφ ) y a (cosφ 1)
contenido en un plano vertical, de modo que labolita puede deslizar, sin rozamiento, bajo laacción de su propio peso. a) Abandonamos labolita en el punto O. Demostrar que la bolitarealizará oscilaciones cuyo periodocorresponde al de las pequeñas oscilaciones deun péndulo simple de longitud 4a. b) Demos-trar que el periodo de las oscilaciones de labolita es independiente del punto desde el quese abandone (isocronismo perfecto).
13.37.- Péndulo cicloidal de Huygens. De-mostrar que si la circunferencia que genera losdos contornos cicloidales tiene precisamente un

396 Lec. 13.- Movimiento armónico simple.
radio que es la cuarta parte de la longitud delhilo de suspensión del péndulo (l=4a) entoncesla masa pendular describe un arco de cicloidecuya circunferencia generatriz tiene el mismoradio a.

14.- Oscilacionesamortiguadas y forzadas.
§14.1. Rozamiento (398); §14.2. Oscilador armónico amortiguado (399);§14.3. Amortiguamiento débil (400); §14.4. Disipación de energía (402); §14.5. Factor decalidad (404); §14.6. Amortiguamiento crítico (405); §14.7. Sobreamortiguamiento (406);§14.8. Oscilaciones forzadas (407); §14.9. Absorción de potencia. Resonancia (412);§14.10. Impedancia de un oscilador (420); Problemas (424)
Hemos estudiado en la lección anterior las oscilaciones libres del osciladorarmónico simple. Esto es, cuando el movimiento del oscilador es tal que susoscilaciones, una vez iniciadas, continúan indefinidamente con la misma amplitud.En las oscilaciones libres, la energía total permanece constante. Por supuesto que lasoscilaciones libres no constituyen, por lo general, una situación física real, ya quenormalmente existirá una disipación de energía (debido a la presencia de fuerzas derozamiento, por ejemplo), de modo que la energía del oscilador, y por ende laamplitud de sus oscilaciones, irá disminuyendo continuamente hasta que, finalmente,cesa el movimiento. Hablamos entonces de oscilaciones amortiguadas, en contraposi-ción a las oscilaciones libres.
Podemos evitar el amortiguamiento de las oscilaciones si disponemos de algúnmecanismo capaz de suministrar energía al oscilador al mismo ritmo que éste la vacediendo al medio resistivo donde tiene lugar el movimiento. Hablamos entonces deoscilaciones forzadas. Un oscilador forzado es aquél que está accionado por unafuerza externa que realiza un trabajo sobre él. Por ejemplo, un columpio que recibaun impulso en cada oscilación constituye un oscilador forzado. En este ejemplo, lafuerza externa es una fuerza impulsiva y periódica, cuyo efecto es suministrar energíaal sistema oscilante para compensar la que pierde por rozamiento, de modo que semantenga constante la amplitud de las oscilaciones. Evidentemente, si el ritmo conque la fuerza externa suministra energía al sistema oscilante es mayor que el ritmocon que éste la disipa, la energía del oscilador y la amplitud de sus oscilaciones iránaumentando hasta que (siempre que haya amortiguamiento) se alcance un estadoestacionario.
Estos son los aspectos que nos proponemos desarrollar en esta lección. En el casodel oscilador forzado, nos limitaremos a considerar fuerzas impulsoras de tipoarmónico simple, y prestaremos particular interés a las condiciones de resonancia.
Manuel R. Ortega Girón 397

398 Lec. 14.- Oscilaciones amortiguadas y forzadas.
§14.1. Rozamiento.- Para analizar dinámicamente las oscilaciones amortiguadasdebemos suponer que , además de la fuerza elástica F=-kx, actúa una fuerza derozamiento. Aunque normalmente resulta muy complicado el análisis detallado de losefectos producidos por el rozamiento sobre el movimiento del oscilador, confrecuencia podemos representar esta fuerza mediante una relación empírica cuyaexpresión matemática es relativamente sencilla y que coincide razonablemente conlos resultados experimentales. La fuerza de rozamiento es siempre opuesta a lavelocidad de la partícula y, en su forma más sencilla, es directamente proporcionala dicha velocidad; esta situación se presenta cuando un cuerpo se mueve en un mediofluido (viscoso) con velocidad moderada. Entonces escribiremos
[14.1]f γ v
donde γ es una constante positiva denominada constante o coeficiente de amortigua-miento. Evidentemente, esta fuerza no es conservativa, debido a que es función dela velocidad. Además, puesto que siempre está dirigida en sentido opuesto al delmovimiento, el trabajo realizado por dicha fuerza es siempre negativo; se trata, pues,de una fuerza disipativa. Obsérvese que las dimensiones de la constante deamortiguamiento son
[14.2][γ] [F][v]
MLT 2
LT 1MT 1
esto es, la de una masa dividida por un tiempo, expresándose en las unidadescorrespondientes (kg/s, g/s, ...).
Antes de iniciar el estudio de las oscilaciones amortiguadas, vamos a sacaralgunas conclusiones acerca del movimiento de una partícula sobre la que actúesolamente una fuerza de rozamiento del tipo anteriormente descrito. Al ser la fuerzade rozamiento la única que actúa sobre la partícula, podemos escribir
[14.3]f mx ⇒ γx mx
de modo que la ecuación diferencial del movimiento de la partícula puede escribirseen la forma
[14.4]mx γx 0
siendo útil definir una nueva constante, τ, llamada tiempo de relajación, por larelación
[14.5]1τ
γm
que tiene dimensiones de tiempo, de modo que la ec. dif. del movimiento se escribe
[14.6]x 1τx 0
En función de la velocidad, la ecuación anterior toma la forma

§14.1.- Rozamiento. 399
[14.7]v 1τv 0
ec. dif. cuya integración nos lleva a
[14.8]⌡⌠v
v0
dvv
1τ ⌡⌠t
0
dt → v v0 e t/τ
La velocidad de la partícu-
Figura 14.1
la disminuye exponencialmentecon el tiempo (Figura 14.1); estoes, la velocidad está amorti-guada con un tiempo de relaja-ción τ. Transcurrido un tiempot=τ será
vv0
e
v0
2.7180.368 v0
Así, el tiempo de relajación esel tiempo que debe transcurrirpara que la velocidad de lapartícula se reduzca a un36.8% de su valor inicial.
En cuanto a la energía cinética de la partícula, tenemos
[14.9]Ek
12mv 2 1
2mv 2
0 e 2t/τ Ek,0 e t/(τ/2)
de modo que el tiempo de relajación efectivo para la energía cinética es la mitad quepara la velocidad.
§14.2. Oscilador armónico amortiguado.- Consideremos una masa m que semueve bajo la acción conjunta de una fuerza restauradora lineal, F=-kx, y de unafuerza resistiva f=-γv, como se esquematiza en la Figura 14.2; entonces la ec. diferencialdel movimiento de la partícula es
[14.10]kx γ x m x ⇒ mx γ x kx 0
que es conveniente escribir en la forma
[14.11]x 2βx ω20x 0
donde [14.12]β γ2m
12τ
ω0
km

400 Lec. 14.- Oscilaciones amortiguadas y forzadas.
son, respectivamente, el parámetro de amortiguamiento ([β]=T-1) y la frecuencia
Figura 14.2
angular1 natural del oscilador; esto es, la frecuencia angular de sus oscilaciones enausencia de amortiguamiento. Observemos que β (parámetro de amortiguamiento)será tanto mayor cuanto mayor sea el grado de amortiguamiento. El cociente entreel parámetro de amortiguamiento (β) y la frecuencia angular natural (ω0) del
oscilador es una magnitud utilizada en lasaplicaciones para caracterizar el grado deamortiguamiento del sistema; recibe el nombrede factor de amortiguamiento (ζ) y es adimen-sional; i.e.,
[14.13]ζ βω0
La ecuación del movimiento [14.11] es unaecuación diferencial lineal de segundo orden, homogénea (esto es, sin segundomiembro) y de coeficientes constantes. La solución general de esta ec. dif. puedeobtenerse mediante los métodos ordinarios de resolución de estas ecuacionesdiferenciales. Sin entrar en el detalle de la resolución de la ec. dif. del movimiento[14.11], diremos que el carácter de su solución depende de los valores de loscoeficientes β y ω0. De acuerdo con los valores relativos de β y ω0 hemos dedistinguir tres casos:
a) Si β < ω0, i.e., ζ<1, el amortiguamiento es débil.
b) Si β = ω0, i.e., ζ=1, el amortiguamiento es crítico.
c) Si β > ω0, i.e., ζ>1, el amortiguamiento es supercrítico.
A continuación vamos a estudiar por separado cada uno de estos tres casos.
§14.3. Amortiguamiento débil.- En el caso de amortiguamiento débil, esto es,β < ω0 (i.e., ζ<1), la solución2 de la ec. dif. del movimiento [14.11] es
[14.14]x A0eβt sen(ω′t ψ)
donde A0 y ψ son dos constantes de integración que se determinarán a partir de lascondiciones iniciales (vide Problema 14.1) y ω′ es la frecuencia angular de lasoscilaciones amortiguadas, dada por
[14.15]ω′ ω20 β2
1 La frecuencia de las oscilaciones es ν = ω/2π. Preferimos utilizar la frecuencia angular paraevitarnos la aparición del factor 2π en la expresiones que obtendremos. Algunos autores denominana ω como frecuencia (simplemente).
2 El lector deberá comprobar que la ec. [14.14] es una solución de la ec. dif. [14.11]; no haymás que sustituir [14.14] y sus derivadas en la expresión [14.11].
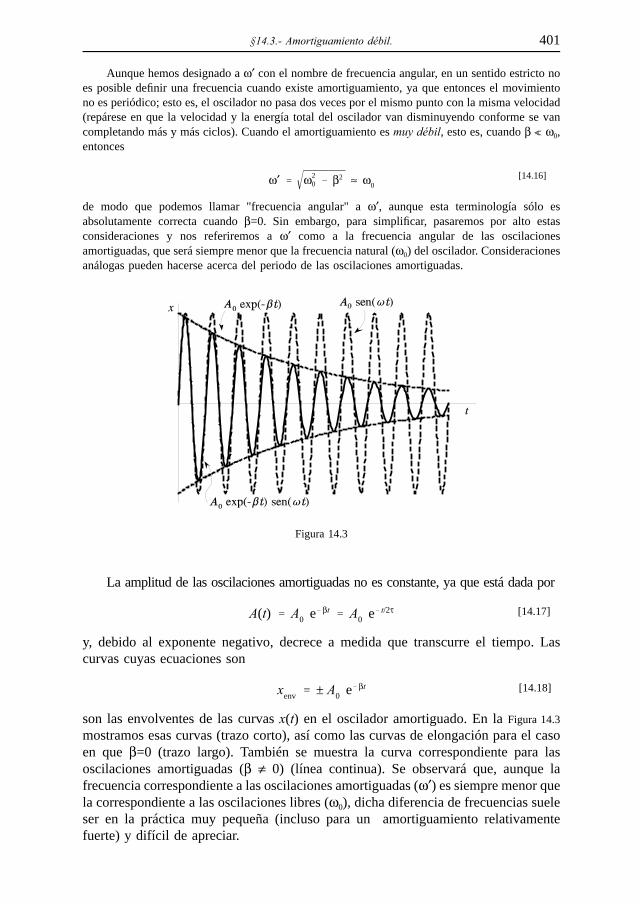
§14.3.- Amortiguamiento débil. 401
Aunque hemos designado a ω′ con el nombre de frecuencia angular, en un sentido estricto noes posible definir una frecuencia cuando existe amortiguamiento, ya que entonces el movimientono es periódico; esto es, el oscilador no pasa dos veces por el mismo punto con la misma velocidad(repárese en que la velocidad y la energía total del oscilador van disminuyendo conforme se vancompletando más y más ciclos). Cuando el amortiguamiento es muy débil, esto es, cuando β ω0,entonces
[14.16]ω′ ω20 β2 ≈ ω0
de modo que podemos llamar "frecuencia angular" a ω′, aunque esta terminología sólo esabsolutamente correcta cuando β=0. Sin embargo, para simplificar, pasaremos por alto estasconsideraciones y nos referiremos a ω′ como a la frecuencia angular de las oscilacionesamortiguadas, que será siempre menor que la frecuencia natural (ω0) del oscilador. Consideracionesanálogas pueden hacerse acerca del periodo de las oscilaciones amortiguadas.
La amplitud de las oscilaciones amortiguadas no es constante, ya que está dada por
Figura 14.3
[14.17]A(t) A0 e βt A0 e t/2τ
y, debido al exponente negativo, decrece a medida que transcurre el tiempo. Lascurvas cuyas ecuaciones son
[14.18]xenv ± A0 e βt
son las envolventes de las curvas x(t) en el oscilador amortiguado. En la Figura 14.3
mostramos esas curvas (trazo corto), así como las curvas de elongación para el casoen que β=0 (trazo largo). También se muestra la curva correspondiente para lasoscilaciones amortiguadas (β ≠ 0) (línea continua). Se observará que, aunque lafrecuencia correspondiente a las oscilaciones amortiguadas (ω′) es siempre menor quela correspondiente a las oscilaciones libres (ω0), dicha diferencia de frecuencias sueleser en la práctica muy pequeña (incluso para un amortiguamiento relativamentefuerte) y difícil de apreciar.

402 Lec. 14.- Oscilaciones amortiguadas y forzadas.
Obsérvese que, como por definición es β=1/2τ, el tiempo de relajación efectivopara la amplitud es τA=1/β=2τ (como veremos más adelante, τ es el tiempo derelajación correspondiente a la energía).
El grado de amortiguamiento del oscilador depende exclusivamente del valor delparámetro de amortiguamiento β y en definitiva de γ=2mβ. Podemos determinarexperimentalmente el valor de β midiendo las amplitudes de dos oscilacionesconsecutivas, ya que
[14.19]A(t) A0 e βt A(t T′) A0 e β(t T′)
de modo que, dividendo miembro a miembro esas dos expresiones, tenemos
[14.20]A(t)A(t T′)
e βT′
con T′=2π/ω′. La cantidad exp(βT′) recibe el nombre de decremento de la amplitud;su logaritmo neperiano, o sea βT′ recibe el nombre de decremento logarítmico; estoes,
[14.21]Δ βT′ πτω′
ln A(t)A(t T′)
Vemos que el amortiguamiento será muy débil si τω′≈τω0 1.
§14.4. Disipación de energía.- En contraste con el oscilador armónico simple,en el oscilador amortiguado la energía no se mantiene constante. La energía deloscilador amortiguado se transfiere gradual y continuamente al medio resistivo y esdisipada en forma de calor o de radiación. La energía disipada por unidad de tiempo(potencia disipada) será proporcional al cuadrado de la velocidad, por ser la fuerzade rozamiento (f=-γv) la responsable de tal disipación de energía, de modo que
[14.22]P dEdt
fv γv 2
Así pues, la energía del oscilador
Figura 14.4
no se disipa de modo uniforme. Laenergía disipada por unidad de tiemposerá máxima cuando el osciladoradquiera su velocidad máxima, cosaque ocurre cuando está cerca (pero noexactamente en) de la posición deequilibrio. La energía disipada porunidad de tiempo será nula cuando, encada oscilación, el oscilador alcanzalas posiciones de elongación máxima,ya que entonces su velocidad es nula.Estos hechos se reflejan en las gráficasde la Figura 14.4.

§14.4.- Disipación de energía. 403
Calcularemos ahora el valor de la energía que se disipa en cada oscilación.Escribiremos primero las expresiones correspondientes a la elongación y a lavelocidad de la partícula oscilante
[14.23]x A0 e βt senω′t x A0 e βt (ω′cosω′t β senω′t)
donde hemos hecho ψ=0, sin que por ello perdamos generalidad en nuestrasvaloraciones. Obsérvese que el tiempo de relajación efectivo para la velocidad es elmismo que para la amplitud.
Puesto que las energías cinética y potencial viene dadas por
[14.24]Ek
12mv 2 Ep
12kx 2
tenemos
[14.25]
Ek
12mA 2
0 e 2βt (ω′2 cos2ω′t β2 sen2ω′t 2ω′β senω′t cosω′t)
Ep
12kA 2
0 e 2βt sen2ω′t 12mω2
0 A2
0 e 2βt sen2ω′t
Tanto la energía cinética como la potencial son función del tiempo y disminuyenconforme se completan más y más ciclos. Al calcular los valores medios temporalesde las energías cinética y potencial, esto es <Ek> y <Ep>, podemos aceptar sacarfuera de los corchetes angulares (que representan medias respecto al tiempo) el factorexp(-2βt). Podemos hacerlo, con razonable aproximación, siempre que elamortiguamiento sea suficientemente débil (βT′ 1), ya que entonces la amplitud dela oscilación no cambia mucho en el transcurso de un ciclo.
Nos aparecerán las medias (extendidas a un ciclo) de las funciones sen2ωt,cos2ωt y senωtcosωt; i.e.,
[14.26]⟨sen2ω′t⟩ ⟨cos2ω′t⟩ 12
⟨senω′t cosω′t⟩ 12⟨sen2ω′t⟩ 0
y las energías cinética y potencial promediadas en el tiempo de un ciclo son
[14.27]
⟨Ek⟩12mA 2
0 e 2βt ⎛⎜⎝
⎞⎟⎠
ω′2
2β2
214mω2
0 A2
0 e 2βt
⟨Ep⟩14mω2
0 A2
0 e 2βt
de modo que [14.28]⟨Ek⟩ ⟨Ep⟩14mω2
0 A2
0 e t/τ ⟨Ek⟩β 0 e t/τ
donde hemos puesto de manifiesto que el tiempo de relajación efectivo para laenergía (cinética o potencial) es τ, o sea, la mitad del correspondiente a la elongacióno a la velocidad.

404 Lec. 14.- Oscilaciones amortiguadas y forzadas.
La energía total almacenada en el oscilador va disminuyendo gradualmente. Suvalor medio en un ciclo es
[14.29]⟨E⟩ ⟨Ek⟩ ⟨Ep⟩12mω2
0 A2
0 e t/τ ⟨E⟩β 0 e t/τ
Así pues, la energía decrece exponencialmente con el tiempo a un ritmo doble quela amplitud o la velocidad.
La disipación media de potencia viene dada por la variación de la energía totaldel oscilador por unidad de tiempo. Esto es, de [14.29] se sigue
[14.30]⟨P⟩ d⟨E⟩dt
1τ
12mω2
0 A2
0 e t/τ
resultando que [14.31]⟨P⟩ ⟨E⟩τ
2β ⟨E⟩
Puede parecernos sorprendente que las medias temporales de las energíascinéticas, potencial y total (expresiones [14.27] y [14.29]) sean función del tiempo t,cuando esas medias lo son precisamente respecto al tiempo. Hemos de tener muypresente que estamos observando el movimiento de un oscilador amortiguado a lolargo de muchos ciclos de su movimiento y que esas expresiones corresponden a lasenergías medias en un ciclo, expresadas en el instante t. Como la energía se vadisipando, es de esperar que dichos valores medios (en un ciclo) vayan disminuyendosegún se vayan completando más ciclos.
§14.5. Factor de calidad.- Es frecuente caracterizar un sistema oscilante porsu Q o factor de calidad. El factor de calidad de un sistema oscilante se define como2π veces la razón entre la energía almacenada y la disipada por ciclo. Esto es
[14.32]Q 2π ⟨energía almacenada⟩⟨energía disipada por ciclo⟩
o sea [14.33]Q 2π ⟨E⟩⟨P⟩T′
ω′ ⟨E⟩⟨P⟩
ω′2β
ω′τ
Obsérvese que Q carece de dimensiones. En el caso de que el amortiguamiento seamuy débil, tenemos
[14.34]Q ω′2β
≈ω0
2βω0τ
y vemos que Q es una buena medida de la falta de amortiguamiento. Valores de Q(o de ω0τ) altos representan un amortiguamiento muy débil. Recordemos que τ es eltiempo de relajación correspondiente a la energía; durante ese tiempo, el osciladorrealiza

§14.5.- Factor de calidad. 405
Tabla 14.1.- Valores representativos del factor de calidad (Q).
SISTEMA OSCILANTE Q
La Tierra, para ondas sísmicas 250-1400
Cuerda de piano o de violín 103
Átomo excitado 107
Núcleo excitado 1012
[14.35]τT
ω′τ2π
Q2π
oscilaciones
En la Tabla 14.1 mostramos algunos valores representativos del Q para algunossistemas oscilantes.
§14.6. Amortiguamiento crítico.- Si el amortiguamiento del oscilador aumentasuficientemente, puede llegar a ser β=ω0 (i.e., ζ=1); entonces, de acuerdo con ladefinición [14.15] de la frecuencia angular de las oscilaciones amortiguadas será ω′=0.Evidentemente, en estas condiciones no hay oscilaciones (ya que el periodo de lasmismas sería infinito) y el oscilador regresará a la posición de equilibrio sin rebasarlao, a lo más, rebasándola una sola vez. La condición de β=ω0 se conoce con elnombre de amortiguamiento crítico del oscilador; i.e., se ha alcanzado un valorcrítico para el amortiguamiento en el que las oscilaciones desaparecen.
En el caso de que β=ω0, es obvio que la ecuación [14.14] no representará unasolución general de la ec. dif. del movimiento del oscilador amortiguado [14.11].Cuando β=ω0, la solución de la ec. dif. [14.11] es de la forma
[14.36]x (A0 A1t) e βt
que el lector deberá comprobar, sustituyéndola en la ec. dif. [14.11]. En la función[14.36], A0 y A1 son dos constantes de integración, que pueden expresarse en funciónde las condiciones iniciales; esto es, de la posición x0 y de la velocidad v0 de lapartícula en el instante inicial. Es fácil comprobar que
[14.37]A0 x0 A1 v0 βx0
En la Figura 14.5 hemos representado gráficamente las curvas elongación-tiempopara un oscilador con amortiguamiento crítico para x0≠0 y diversos valores de lavelocidad inicial v0. Obsérvese como, dependiendo del valor inicial de la velocidad,puede rebasarse la posición de equilibrio antes de que la partícula se aproximeasintóticamente a ella. El lector deberá trazar la gráfica correspondiente a las condi-ciones iniciales x0=0, v0≠0.

406 Lec. 14.- Oscilaciones amortiguadas y forzadas.
Para unas determinadas condiciones iniciales, un oscilador con amortiguamientocrítico se aproxima más rápidamente la posición de equilibrio que uno sobreamorti-guado o infraamortiguado. Este hecho es muy importante cuando se diseñan ciertosmecanismos oscilantes (un galvanómetro, por ejemplo) en los que se desea que elmecanismo regrese suave y rápidamente a su posición de equilibrio. Como otroejemplo de sistema con amortiguamiento crítico o casi-crítico citaremos el sistemade suspensión de un vehículo automóvil; esto puede comprobarse empujando haciaabajo la parte delantera o trasera de un automóvil (a fin de comprimir los amortigua-dores) y observando que se producen una o dos oscilaciones antes de que el sistemaquede en reposo.
§14.7. Sobreamortiguamiento.- El sobreamortiguamiento se presenta cuando
Figura 14.5 Figura 14.6
el parámetro de amortiguamiento β es mayor que la frecuencia angular natural ω0 deloscilador (i.e., ζ>1). Entonces, de acuerdo con la definición [14.15] de la frecuenciaangular de las oscilaciones amortiguadas, ω′ será imaginaria. En estas condicioneses evidente que no habrán oscilaciones, y la partícula regresará a la posición deequilibrio sin rebasarla o rebasándola una vez a lo sumo. Para unas condicionesiniciales dadas (x0,v0), cuanto mayor sea el amortiguamiento más tiempo empleará elsistema en quedar en reposo en la posición de equilibrio.
Como en el caso anterior (crítico), es obvio que la ecuación diferencial [14.11] delmovimiento deberá tener una solución para el caso en que β>ω0 distinta de la [14.14]
y de la [14.36]. Para el oscilador sobreamortiguado, la solución de la ec. dif. [14.11] esde la forma
[14.38]x A1 e Ω1 t A2 e Ω2 t
con [14.39]Ω1 β β2 ω20 Ω2 β β2 ω2
0
donde A1 y A2 son dos constantes de integración cuyos valores (vide Problema 14.2)dependerán de las condiciones iniciales (x0,v0). Puesto que Ω1 y Ω2 son siemprepositivas, la ecuación [14.38] consta de dos términos que decrecen exponencialmentecon el tiempo, el primero más rápidamente que el segundo, de modo que la partículase aproxima asintóticamente hacia la posición de equilibrio, disipando en el camino

§14.7.- Sobreamortiguamiento. 407
toda la energía de que disponía inicialmente. Obsérvese que ni Ω1 ni Ω2 representanahora una "frecuencia angular", ya que el movimiento es claramente aperiódico.
En la Figura 14.6 hemos representado gráficamente las curvas de elongación-tiempocorrespondientes a un oscilador infraamortiguado, un oscilador con amortiguamientocrítico y un oscilador sobreamortiguado, para las mismas condiciones iniciales x0≠0,v0=0.
Debemos hacer una última aclaración. Es evidente que una fuerza de rozamientodel tipo -γv, tal como hemos supuesto en nuestro estudio de las oscilaciones amorti-guadas, no puede representar exactamente las situaciones reales, en las que el oscila-dor queda en reposo al cabo de un tiempo finito; con una fuerza de rozamiento deltipo -γv el reposo sólo se alcanzaría al cabo de un tiempo infinitamente grande.
§14.8. Oscilaciones forzadas.- En los osciladores reales, sean estos una masa
Figura 14.7
sujeta a un muelle, un péndulo, un circuito eléctrico oscilante, ... existe siempre unadisipación de energía, de modo que las oscilaciones de esos sistemas se amortiguan,disminuyendo la amplitud en el transcurso del tiempo hasta que finalmente desapare-cen. Si deseamos mantener las oscilaciones de esos sistemas, deberemos compensarel amortiguamiento disponiendo de un mecanismo que suministre energía al sistemaal mismo ritmo que éste la está disipando, o sea,cediéndola al medio resistivo. En nuestroanálisis actual de los sistemas oscilantes noslimitaremos a las oscilaciones mecánicas.
Para suministrar energía al sistema oscilan-te, desde el exterior, será necesario aplicarle unafuerza que realice trabajo sobre el sistema(Figura 14.7). Esta fuerza será función del tiempo,esto es, F(t), de modo que la ecuación diferen-cial del movimiento del oscilador forzado será
[14.40]F(t) kx γx mx ⇒ mx γ x kx F(t)
o bien, con una notación más conveniente
[14.41]x 2β x ω20x α(t)
con [14.42]β γ2m
ω0
km
α(t) F(t)m
donde β es el parámetro de amortiguamiento y ω0 es la frecuencia angular natural delsistema oscilante, esto es, la frecuencia angular de sus oscilaciones libres noamortiguadas, ni forzadas. La función α(t), i.e., la fuerza impulsora específica, sueledenominarse función de excitación.
El caso más sencillo e interesante de oscilaciones forzadas se presenta cuandola fuerza impulsora varía armónicamente con el tiempo, esto es, cuando se trata deuna fuerza periódica, de frecuencia angular ω, expresable en la forma

408 Lec. 14.- Oscilaciones amortiguadas y forzadas.
[14.43]F(t) F0 sen ωt
donde F0 y ω son, respectivamente, la amplitud y la frecuencia angular de la fuerzaimpulsora. En estas condiciones, resulta conveniente definir
[14.44]α0
F0
m
de modo que la ec. dif. del movimiento [14.41] pueda escribirse como
[14.45]x 2βx ω20x α0 sen ωt
que es una ec. dif. lineal de segundo orden, no homogénea (esto es con segundomiembro independiente de x), de coeficientes constantes. La solución general de estaecuación diferencial consta de dos partes: la función complementaria xc(t), que es lasolución de la ecuación diferencial homogénea (esto es, con el segundo miembroigualado a cero), más una solución particular xp(t), que satisfaga a la ecuacióndiferencial no homogénea.
Es evidente que la función complementaria es la misma que la de la ec. dif.[14.11], ya considerada en los artículos anteriores. Limitando nuestro estudio a lasoscilaciones forzadas débilmente amortiguadas; esto es, para β<ω0, tenemos
[14.46]xc(t) A0 e βt sen(ω′t ψ)
donde es la frecuencia angular de las oscilaciones amortiguadas enω′ ω20 β2
ausencia de fuerza impulsora alguna3.Ensayemos una solución particular, de la ec. dif. [14.45] de la forma
[14.47]xp(t) A sen(ωt δ)
Derivamos dos veces sucesivas, con respecto al tiempo, la expresión anterior,
[14.48]xp ωA cos(ωt δ) xp ω2Asen(ωt δ)
sustituimos estas expresiones en la ec. dif. [14.45],
[14.49]ω2A sen(ωt δ) 2βωA cos(ωt δ) ω20A sen(ωt δ) α0 senωt
y teniendo en cuenta que
[14.50]⎧⎨⎩
sen(ωt δ) senωt cosδ cosωt senδcos(ωt δ) cosωt cosδ senωt senδ
después de algunas operaciones y de reagrupar términos, se obtiene
3 Obsérvese que debemos distinguir claramente entre la frecuencia angular de las oscilacioneslibres (ω0), la frecuencia angular de las oscilaciones amortiguadas (ω′) y la frecuencia angular dela fuerza impulsora (ω).

§14.8.- Oscilaciones forzadas. 409
[14.51]α0 A [(ω2
0 ω2) cosδ 2βω senδ ] senωtA [(ω2
0 ω2) senδ 2βω cosδ ] cosωt 0
Puesto que las funciones sen ωt y cos ωt no se anulan simultáneamente paraningún valor de t, esta última ecuación sólo se satisface en general si los coeficientesde cada término son idénticamente nulos. Esto es, debe anularse el coeficiente decosωt, de modo que
[14.52]tgδ 2βωω2
0 ω2
de donde [14.53]
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
senδ tgδ
1 tg2δ
2βω
(ω20 ω2)2 4β2ω2
cosδ 1
1 tg2δ
ω20 ω2
(ω20 ω2)2 4β2ω2
expresiones que nos permiten calcular el ángulo de desfase δ entre la fuerzaimpulsora y la elongación.
También deberá anularse el coeficiente de senωt, de modo que resulta
[14.54]Aα0
(ω20 ω2)cosδ 2βωsenδ
Expresión en la que sustituiremos las relaciones [14.53] para obtener la amplitud A enfunción de las frecuencias angulares ω y ω0; i.e.,
[14.55]Aα0
(ω20 ω2)2 4β2ω2
Obsérvese que tanto A como δ no son ahora constantes arbitrarias que dependande las condiciones iniciales, sino cantidades fijas que dependen de las característicasdel sistema amortiguado (ω0,β) y de la fuerza impulsora (ω,α0). Matemáticamente,esto significa que hemos obtenido una solución particular de la ec. dif. [14.45];escribiremos esta solución en la forma
[14.56]xp(t)α0
(ω20 ω2)2 4β2ω2
sen⎛⎜⎜⎝
⎞⎟⎟⎠
ωt arctg 2βωω2
0 ω2
La solución completa de la ec. dif. [14.45] es
[14.57]x xc(t) xp(t) A0 e βt sen(ω′t ψ) A sen(ωt δ)

410 Lec. 14.- Oscilaciones amortiguadas y forzadas.
El primer término de esta solución completa se amortigua exponencialmente con eltiempo, de modo que una vez transcurrido un tiempo suficientemente largo encomparación con el tiempo de relajación, esto es, para t τA=1/β, no contribuye demodo apreciable a la solución completa, puesto que prácticamente habrá desapareci-do. Por esa razón recibe el nombre de solución o efecto transitorio. El segundotérmino de [14.57] representa la solución o estado estacionario, porque, al no estaramortiguado, será el que prevalezca una vez transcurrido un tiempo grande encomparación con el tiempo de relajación. Esto es
[14.58]x(t τA) A sen(ωt δ)
donde la amplitud A y el ángulo de desfase δ viene dados por las expresiones [14.55]
y [14.52], respectivamente, con independencia de las condiciones iniciales, que obvia-mente no interesarán cuando únicamente se considera el estado estacionario. Aunqueen determinados problemas los efectos transitorios son importantes, el estadoestacionario suele ser el que nos interesará en gran parte de las aplicaciones y proble-mas.
Los detalles del movimiento durante el tiempo en que persiste el efecto transi-torio (t τA) dependen fuertemente del estado en que se encontraba el oscilador en elinstante inicial (t=0) en que se aplicó la fuerza impulsora, así como de los valoresrelativos entre la frecuencia de amortiguamiento (ω′) y la frecuencia de la fuerzaimpulsora (ω).
En la Figura 14.8 se muestra el efecto transitorio en el movimiento de un oscilador cuandoω<ω′; en estas condiciones, la respuesta del oscilador está notablemente distorsionada durante losprimeros ciclos tras la aplicación de la fuerza impulsora. En la Figura 14.9 se muestra el efectotransitorio cuando ω>ω’; en este caso, la respuesta de mayor frecuencia (correspondiente al estadoestacionario) está modulada y ligeramente distorsionada por la frecuencia de amortiguamientodurante los primeros ciclos del movimiento.
Cuando a un oscilador se le impone una fuerza impulsora con una frecuencia ω,
Figura 14.8 Figura 14.9
diferente de su frecuencia natural ω0, la frecuencia de las oscilaciones en el estadoestacionario (una vez que han desaparecido los efectos transitorios) será precisamentela frecuencia impuesta ω. Esta es una característica importante del oscilador:
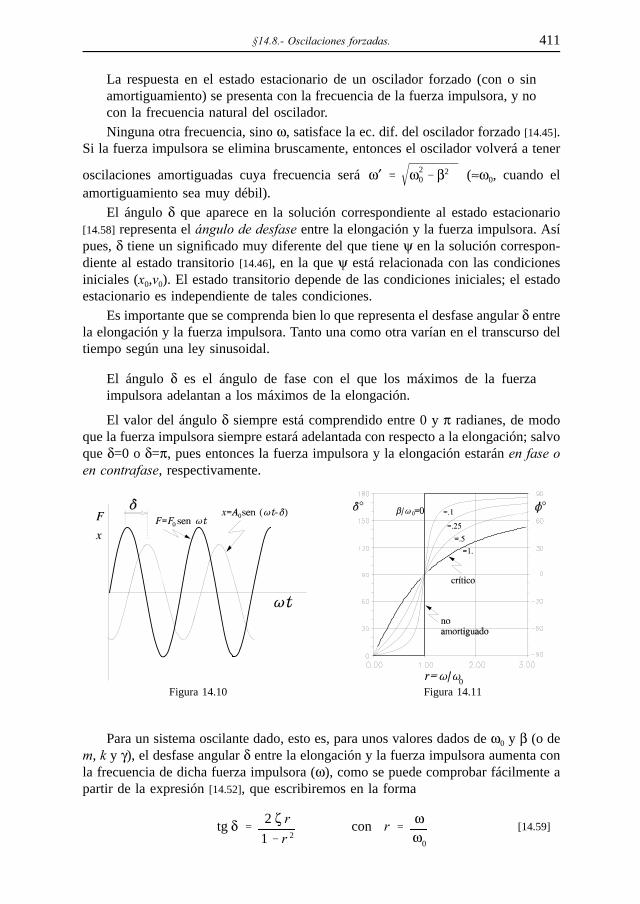
§14.8.- Oscilaciones forzadas. 411
La respuesta en el estado estacionario de un oscilador forzado (con o sinamortiguamiento) se presenta con la frecuencia de la fuerza impulsora, y nocon la frecuencia natural del oscilador.Ninguna otra frecuencia, sino ω, satisface la ec. dif. del oscilador forzado [14.45].
Si la fuerza impulsora se elimina bruscamente, entonces el oscilador volverá a tener
oscilaciones amortiguadas cuya frecuencia será (≈ω0, cuando elω′ ω20 β2
amortiguamiento sea muy débil).El ángulo δ que aparece en la solución correspondiente al estado estacionario
[14.58] representa el ángulo de desfase entre la elongación y la fuerza impulsora. Asípues, δ tiene un significado muy diferente del que tiene ψ en la solución correspon-diente al estado transitorio [14.46], en la que ψ está relacionada con las condicionesiniciales (x0,v0). El estado transitorio depende de las condiciones iniciales; el estadoestacionario es independiente de tales condiciones.
Es importante que se comprenda bien lo que representa el desfase angular δ entrela elongación y la fuerza impulsora. Tanto una como otra varían en el transcurso deltiempo según una ley sinusoidal.
El ángulo δ es el ángulo de fase con el que los máximos de la fuerzaimpulsora adelantan a los máximos de la elongación.
El valor del ángulo δ siempre está comprendido entre 0 y π radianes, de modoque la fuerza impulsora siempre estará adelantada con respecto a la elongación; salvoque δ=0 o δ=π, pues entonces la fuerza impulsora y la elongación estarán en fase oen contrafase, respectivamente.
Para un sistema oscilante dado, esto es, para unos valores dados de ω0 y β (o de
Figura 14.10 Figura 14.11
m, k y γ), el desfase angular δ entre la elongación y la fuerza impulsora aumenta conla frecuencia de dicha fuerza impulsora (ω), como se puede comprobar fácilmente apartir de la expresión [14.52], que escribiremos en la forma
[14.59]tg δ 2 ζ r1 r 2
con r ωω0

412 Lec. 14.- Oscilaciones amortiguadas y forzadas.
En la Figura 14.11 presentamos las curvas de desfase angular-frecuencia impulsorapara varios valores del amortiguamiento. Cuando el amortiguamiento sea muy débil,entonces la elongación estará aproximadamente en fase con la fuerza impulsora (δ≈0)para frecuencias de ésta inferiores a la frecuencia natural al sistema (ω0); parafrecuencias impulsoras ω>ω0, el desfase angular será de casi 180°. Para amortigua-mientos menos débiles, el paso de un desfase δ≈0 al desfase δ≈180° es más gradual.Obsérvese que, cualquiera que sea el valor del amortiguamiento (con β≠0) el desfaseentre la elongación y la fuerza impulsora será δ=π/2 (=90°) cuando la frecuenciaimpulsora sea igual a la frecuencia natural del oscilador (ω=ω0).
§14.9. Absorción de potencia. Resonancia.- La velocidad de la partículaoscilante, en el estado estacionario, se puede obtener derivando la expresión [14.58]
correspondiente a la elongación
[14.60]v x ωA cos(ωt δ) ωA sen(ωt δ π2
) ωA sen(ωt φ)
donde hemos preferido introducir el desfase angular φ entre la velocidad y la fuerzaimpulsora, que está relacionado con el desfase angular δ por
[14.61]φ δ π2
⇒ cos φ sen δ
Cuando φ > 0, la fuerza impulsora está adelantada respecto a la velocidad. Cuandoφ=0, la fuerza impulsora y la velocidad están en fase. Cuando φ < 0, la fuerzaimpulsora está retrasada respecto a la velocidad. Evidentemente, la velocidad siempreestá adelantada π/2=90° respecto a la elongación. Obsérvese que la velocidad está enfase con la fuerza impulsora (φ=0) cuando la elongación y la fuerza impulsora estánen cuadratura (δ=π/2), como se ilustra en la Figura 14.11.
En el estado estacionario, la potencia transferida al oscilador por la fuerzaimpulsora viene dada por
[14.62]P Fv (F0 senωt) ωA sen(ωt φ)
ωAF0 (sen2ωt cosφ senωt cosωt senφ)
de modo que varía con el tiempo
Figura 14.12
en el transcurso de un ciclo. En laFigura 14.12 hemos representadográficamente la función P(t);obsérvese que es periódica y quesu frecuencia angular es 2ω.
Estamos interesados, una vezmás, en la potencia media transfe-rida al oscilador durante un ciclode oscilación, ya que este datoserá el que nos permitirá calcularla energía total transferida durante

§14.9.- Absorción de potencia. Resonancia. 413
un cierto intervalo de tiempo t (t 2π/ω). Calcularemos dicho valor medio a partir dela expresión [14.62]; teniendo en cuenta la expresiones [14.26] llegaremos a
[14.63]⟨P⟩ 12ωAF0 cosφ
El factor (cos φ) recibe el nombre de factor de potencia.De entre las expresiones [14.53a] y [14.55], teniendo en cuenta [14.61b], se deduce
fácilmente que
[14.64]Aα0
2βωsenδ
F0
2mβωsenδ
F0
2mβωcosφ
expresión que podemos utilizar para eliminar A en [14.63]. Así, tenemos
[14.65]⟨P⟩ 12
F 20
2mβcos2φ
donde podemos ver que la transferencia de potencia al oscilador es máxima cuandocosφ =1, esto es, cuando φ=0, de modo que entonces la velocidad estará en fase conla fuerza impulsora. Decimos entonces que hay resonancia en la transferencia depotencia al oscilador. Puesto que cuando φ=0, es δ=π/2, y hemos visto que esto tansólo ocurre cuando ω=ω0 (para cualquier valor del amortiguamiento, β≠0), podemosdecir que
La máxima transferencia de potencia, es decir, la resonancia, se presentacuando la frecuencia de la fuerza impulsora coincide con la frecuencianatural del oscilador.
Entonces, la velocidad y la fuerza impulsora están en fase, de modo que lapartícula siempre se mueve en la misma dirección de la fuerza; ésta es, evidente-mente, la condición más favorable para transferir potencia al oscilador.
Podemos poner de manifiesto la dependencia de <P> con la frecuencia de lafuerza impulsora (ω) sin más que sustituir en [14.63] las expresiones de A y de cosφ(=senδ) dadas por [14.55] y [14.53a], respectivamente; así tendremos.
[14.66]⟨P⟩ mβA 2ω2mβα2
0ω2
(ω20 ω2)2 4β2ω2
En la Figura 14.13 se representan gráficamente las curvas de potencia media trans-ferida al oscilador por la fuerza impulsora en función de la frecuencia de ésta paravarios valores del amortiguamiento. Estas curvas reciben el nombre de curvas deresonancia. Obsérvese que la potencia media transferida alcanza su valor máximo(para un amortiguamiento dado) cuando ω=ω0 y que cuanto menor es el amortigua-miento mayor será el valor de <P> en la resonancia y más estrecha la curva de reso-nancia, esto es, más aguda será la resonancia. Conforme β→0, aumentan la altura dela resonancia y su agudeza.
La amplitud A de las oscilaciones forzadas, en el estado estacionario, es funciónde la frecuencia de la fuerza impulsora. En la Figura 14.14 representamos gráficamente
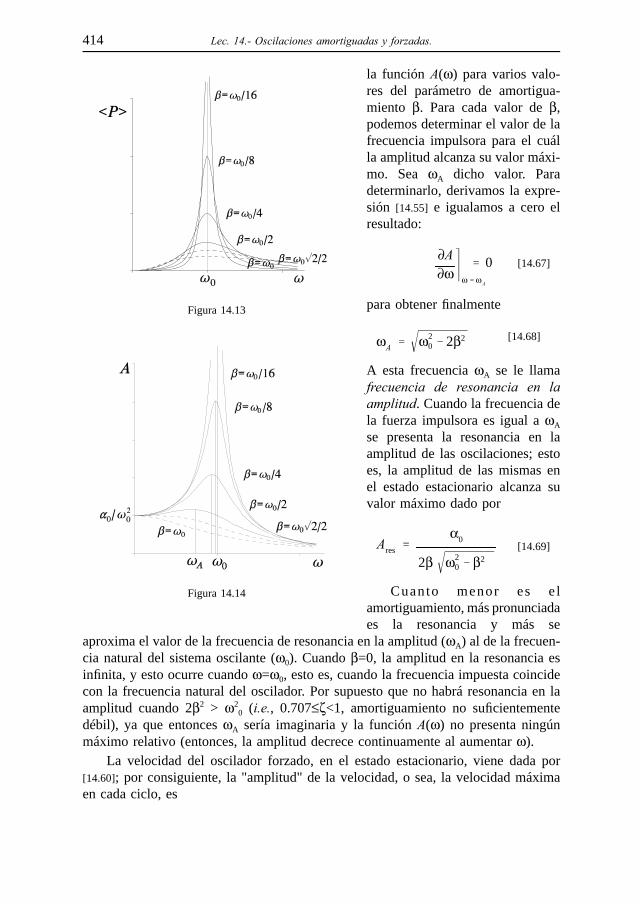
414 Lec. 14.- Oscilaciones amortiguadas y forzadas.
la función A(ω) para varios valo-
Figura 14.13
Figura 14.14
res del parámetro de amortigua-miento β. Para cada valor de β,podemos determinar el valor de lafrecuencia impulsora para el cuálla amplitud alcanza su valor máxi-mo. Sea ωA dicho valor. Paradeterminarlo, derivamos la expre-sión [14.55] e igualamos a cero elresultado:
[14.67]∂A∂ω ω ω A
0
para obtener finalmente
[14.68]ωA ω20 2β2
A esta frecuencia ωA se le llamafrecuencia de resonancia en laamplitud. Cuando la frecuencia dela fuerza impulsora es igual a ωA
se presenta la resonancia en laamplitud de las oscilaciones; estoes, la amplitud de las mismas enel estado estacionario alcanza suvalor máximo dado por
[14.69]Ares
α0
2β ω20 β2
Cuanto menor es e lamortiguamiento, más pronunciadaes la resonancia y más se
aproxima el valor de la frecuencia de resonancia en la amplitud (ωA) al de la frecuen-cia natural del sistema oscilante (ω0). Cuando β=0, la amplitud en la resonancia esinfinita, y esto ocurre cuando ω=ω0, esto es, cuando la frecuencia impuesta coincidecon la frecuencia natural del oscilador. Por supuesto que no habrá resonancia en laamplitud cuando 2β2 > ω2
0 (i.e., 0.707≤ζ<1, amortiguamiento no suficientementedébil), ya que entonces ωA sería imaginaria y la función A(ω) no presenta ningúnmáximo relativo (entonces, la amplitud decrece continuamente al aumentar ω).
La velocidad del oscilador forzado, en el estado estacionario, viene dada por[14.60]; por consiguiente, la "amplitud" de la velocidad, o sea, la velocidad máximaen cada ciclo, es
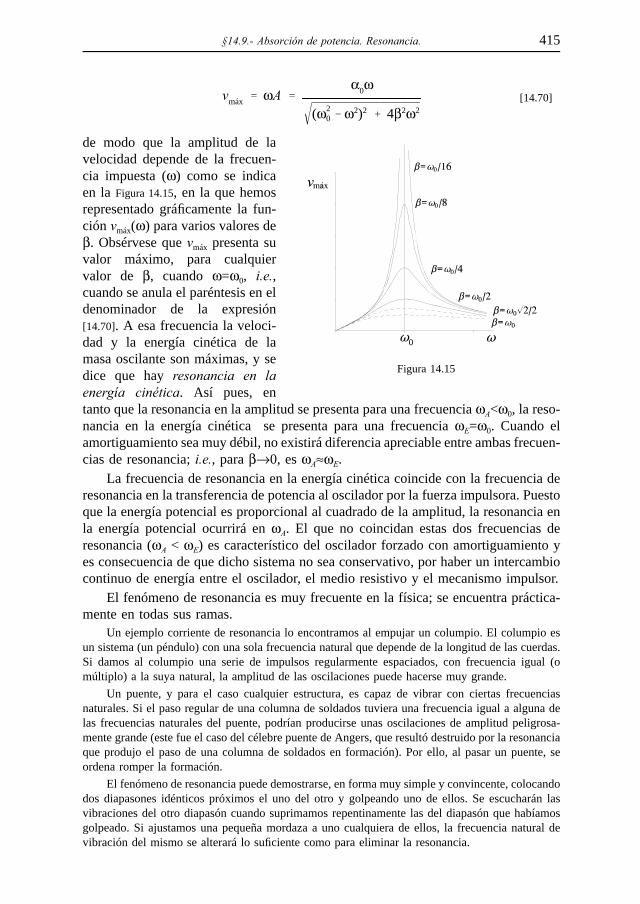
§14.9.- Absorción de potencia. Resonancia. 415
[14.70]vmáx ωAα0ω
(ω20 ω2)2 4β2ω2
de modo que la amplitud de la
Figura 14.15
velocidad depende de la frecuen-cia impuesta (ω) como se indicaen la Figura 14.15, en la que hemosrepresentado gráficamente la fun-ción vmáx(ω) para varios valores deβ. Obsérvese que vmáx presenta suvalor máximo, para cualquiervalor de β, cuando ω=ω0, i.e.,cuando se anula el paréntesis en eldenominador de la expresión[14.70]. A esa frecuencia la veloci-dad y la energía cinética de lamasa oscilante son máximas, y sedice que hay resonancia en laenergía cinética. Así pues, entanto que la resonancia en la amplitud se presenta para una frecuencia ωA<ω0, la reso-nancia en la energía cinética se presenta para una frecuencia ωE=ω0. Cuando elamortiguamiento sea muy débil, no existirá diferencia apreciable entre ambas frecuen-cias de resonancia; i.e., para β→0, es ωA≈ωE.
La frecuencia de resonancia en la energía cinética coincide con la frecuencia deresonancia en la transferencia de potencia al oscilador por la fuerza impulsora. Puestoque la energía potencial es proporcional al cuadrado de la amplitud, la resonancia enla energía potencial ocurrirá en ωA. El que no coincidan estas dos frecuencias deresonancia (ωA < ωE) es característico del oscilador forzado con amortiguamiento yes consecuencia de que dicho sistema no sea conservativo, por haber un intercambiocontinuo de energía entre el oscilador, el medio resistivo y el mecanismo impulsor.
El fenómeno de resonancia es muy frecuente en la física; se encuentra práctica-mente en todas sus ramas.
Un ejemplo corriente de resonancia lo encontramos al empujar un columpio. El columpio esun sistema (un péndulo) con una sola frecuencia natural que depende de la longitud de las cuerdas.Si damos al columpio una serie de impulsos regularmente espaciados, con frecuencia igual (omúltiplo) a la suya natural, la amplitud de las oscilaciones puede hacerse muy grande.
Un puente, y para el caso cualquier estructura, es capaz de vibrar con ciertas frecuenciasnaturales. Si el paso regular de una columna de soldados tuviera una frecuencia igual a alguna delas frecuencias naturales del puente, podrían producirse unas oscilaciones de amplitud peligrosa-mente grande (este fue el caso del célebre puente de Angers, que resultó destruido por la resonanciaque produjo el paso de una columna de soldados en formación). Por ello, al pasar un puente, seordena romper la formación.
El fenómeno de resonancia puede demostrarse, en forma muy simple y convincente, colocandodos diapasones idénticos próximos el uno del otro y golpeando uno de ellos. Se escucharán lasvibraciones del otro diapasón cuando suprimamos repentinamente las del diapasón que habíamosgolpeado. Si ajustamos una pequeña mordaza a uno cualquiera de ellos, la frecuencia natural devibración del mismo se alterará lo suficiente como para eliminar la resonancia.

416 Lec. 14.- Oscilaciones amortiguadas y forzadas.
Un ejemplo de resonancia electromagnética lo constituye el proceso de sintonización de unaparato de radio. Todas las emisoras están produciendo oscilaciones forzadas en el circuito delreceptor. A cada posición del sintonizador corresponde una frecuencia natural de oscilación (electro-magnética) del circuito eléctrico del receptor. Cuando esa frecuencia coincide con la de la emisoraque deseamos sintonizar, la potencia absorbida alcanza un valor máximo y esa será la única emisoraque oiremos.
El concepto de resonancia se extiende a muchos procesos en los que hay unas condicionesfavorables para la transferencia de energía de un sistema a otro, incluso cuando no podamosdescribir el proceso en función de oscilaciones forzadas. Así, en ese sentido, es posible hablar deresonancias en reacciones nucleares y en procesos que tienen lugar entre partículas elementales.
Ejemplo I.- Oscilación forzada.- Cuando colgamos un objeto 200 g de un
Figura 14.16
muelle suspendido verticalmente, se observa que la frecuencia de las oscilacio-nes amortiguadas de éste es de 2 Hz, con un tiempo de relajación para laamplitud de 10 s. Hacemos oscilar hacia arriba y abajo el extremo superior delmuelle, con un movimiento armónico simple, con una amplitud de 1 mm.a) Determinar el valor de la constante elástica k del muelle y de la constante deamortiguamiento γ del sistema. b) ¿Cuál deberá ser la frecuencia de lasoscilaciones de dicho extremo superior para que sea máxima la amplitud de lasoscilaciones del objeto? ¿Cuánto valdrá dicha amplitud máxima? c) Calcular elfactor de calidad del sistema oscilante. d) ¿Qué potencia está suministrando lafuerza impulsora? ¿Que potencia se disipa en el amortiguamiento? ¿Qué energíaqueda almacenada en el sistema?
El esquema del sistema oscilante es el que se muestra en la figura. Comenzaremosdeterminando el parámetro de amortiguamiento β y la frecuencia natural ω0 del sistema oscilante:
ν′ 2 Hz ω′ 2πν′ 4π 12.57 rads
β 12τ
1τA
110
0.1 s 1
ω′2 ω20 β2 → ω0 ω′2 β2 12.57 rad
sζ β
ω0
0.008
de modo que el amortiguamiento es muy débil (ζ 1).
a) Escribamos ahora la ec. dif. del movimiento de m; esto es,
k(x y) γx mx → mx γx kx ky → x γmx k
mx k
my
en la que hemos omitido el peso (mg=cte.) ya que la existencia de éste tan sólo determina laposición de equilibrio en torno a la cual tienen lugar las oscilaciones, sin intervenir en lascaracterísticas esenciales del movimiento. De la ec. dif. anterior4 se sigue
4 La ec. dif. del movimiento nos sugiere la posibilidad de considerar una fuerza impulsoraequivalente, dada por Feq=ky, aunque sólo sea para poder proceder a la integración de la ec.diferencial del movimiento siguiendo la pauta desarrollada en el epígrafe §14.8. Sin embargo, ellector comprobará fácilmente que, en el sistema representado en la Figura 14.17, la fuerza
impulsora real que deberá actuar sobre el extremo superior del muelle para producir la oscilacióny B senωtserá , de modo que sólo podemos evaluarla una vez que tengamos la soluciónF k ( y x)
de la ec. diferencial del movimiento.x A sen (ωt δ )

§14.9.- Absorción de potencia. Resonancia. 417
2β γm
→ γ 2mβ 2 0.200 0.1 0.04 kgs
ω20
km
→ k mω20 0.200 12.572 31.6 N
m
y, además, puesto que la oscilación del extremo superior del muelle está descrita por ,y B sen ωtcon B=1 mm, la función de excitación del sistema oscilante queda definida por
α(t) kmy ω2
0B senωt α0 senωt
de modo que .α0 ω20 B
b) Para que sea máxima la amplitud de las oscilaciones de m, la frecuencia impuesta (ω) porla oscilación del extremo superior del muelle deberá ser igual a la frecuencia de resonancia enamplitud [14.68], que coincide prácticamente con la frecuencia natural ω0 (amortiguamiento muydébil); i.e.,
ω ≈ ω0 12.57 rads
La amplitud de las oscilaciones en la resonancia [14.69] será
Ares
α0
2β ω20 β2
≈α0
2βω0
ω0B
2β12.57 0.001
2 0.10.0628 m 62.8 mm
c) El factor de calidad Q lo calculamos mediante la expresión [14.34]:
Q ω′2β
≈ω0
2β12.572 0.1
62.8
Obsérvese que Ares ≈ QB.
d) La energía media almacenada en el oscilador será:
⟨E⟩ 12kA 2
res12
31.6 0.06282 0.0623 J
La potencia suministrada al sistema, en el estado estacionario, es igual a la potencia disipada enel amortiguamiento. Podemos calcularla a partir de la definición del factor de calidad [14.33]:
Q 2π ⟨E⟩⟨P⟩T0
ω0
⟨E⟩⟨P⟩
→ ⟨P⟩ω0
Q⟨E⟩ 12.57
62.80.0623 0.01248 W 12.48 mW
Ejemplo II.- Rotación desequilibrada. Una máquina que posee una parte rotatoria (v.g., un motoreléctrico) puede esquematizarse como se muestra en la figura, siendo M la masa total de la máquinay m una masa equivalente excéntrica (incluida en la masa total M) situada a una distancia e del ejede rotación, de modo que, cuando la máquina está en marcha, se producen vibraciones de la mismafrecuencia que la de rotación del rotor. a) Encontrar la expresión de la amplitud de las vibracionesverticales de la máquina en función de su velocidad de rotación (ω) y de las características (k,γ)del sistema de amortiguamiento. b) Determinar la amplitud de las vibraciones en la resonancia.c) Determinar la fuerza que se transmite al suelo.

418 Lec. 14.- Oscilaciones amortiguadas y forzadas.
a) La fuerza "asociada" a la masa excéntrica m es emω2
Figura 14.17
(fuerza centrífuga), cuya componente vertical es emω2 senωt, loque representa una fuerza impulsora equivalente
F(t) mω2e senωt F0 senωt con F0 emω2
donde el producto em suele recibir el nombre de desbalancea-miento. Obsérvese que F0 es función de ω. Así pues, la ec. dif. delmovimiento se escribe en la forma
F(t) kx γx Mx ⇒ x γMx k
Mx
F0
Msenωt
de modo que, por analogía con la ec. dif. [14.41], será
β γ2M
ω20
kM
α0
emM
ω2
La elongación de las vibraciones verticales de la máquina vendrá dada por la función
con A y δ dadas por [14.55] y [14.52], respectivamente; esto es,x A sen ( ωt δ )
[i]A emω2
M (ω20 ω2)2 4β2ω2
δ arctg 2βωω2
0 ω2
o bien [ii]A emω2
(k Mω2)2 γ2 ω2
b) Para determinar la amplitud de las vibraciones verticales correspondiente a la resonancia(amplitud máxima), determinaremos el valor máximo de A(ω); esto es,
⎤⎥⎦
dAdω ωA
0 Ares A(ω A)
Después de algunas operaciones, obtendremos la frecuencia de resonancia y la amplitud deresonancia:
[iii]ωAω2
0
ω20 2β2
Ares
emM
ω20
2β ω20 β2
expresiones que, obviamente, son diferentes de [14.68] y [14.69], respectivamente. Obsérvese quesi el amortiguamiento fuese muy débil (β ω0) sería
[iv]ωA ω0 Ares
emω0
2Mβ
pudiendo llegar a ser peligrosamente grande la amplitud de las vibraciones. En consecuencia, enel diseño del amortiguamiento, deberá evitarse que la frecuencia angular natural (ω0) asociada a éstetenga un valor cercano al de la velocidad angular (ω) de trabajo de la máquina.
c) La fuerza transmitida al suelo es la suma de las generadas por el muelle y el amortiguador:
[v]Ft kx γx

§14.9.- Absorción de potencia. Resonancia. 419
con x A sen (ωt δ) x ωA cos (ωt δ)
de modo que
[vi]Ft kA sen (ωt δ) γωA cos (ωt δ) A k 2 γ2ω2 sen (ωt ϕ)
El cociente entre las amplitudes de la fuerza transmitida y de la fuerza impulsora, que recibe elnombre de transmisibilidad, será
[vii]TRFt
F0
A k 2 γ2ω2
emω2
k 2 γ2ω2
(k Mω2)2 γ2ω2
que también podemos expresar en la forma
[viii]TRω4
0 4β2ω2
(ω20 ω2)2 4β2ω2
1 4ζ2 r 2
(1 r 2)2 4ζ2 r 2
con ζ βω0
r ωω0
Ejemplo III.- Instrumentación sísmica.- En lo esencial, un instrumento sísmico es un sistema
Figura 14.18
oscilante consistente en una base o soporte, firmemente anclada en el terreno, a la que está unidauna masa m mediante un muelle-amortiguador,como se ilustra en la Figura 14.18. El movimientorelativo entre la masa y la base se puede registrargráficamente mediante un tambor giratorio u otrodispositivo apropiado. Supongamos que la oscila-ción de la base quede descrita por y=Bsenωt.a) Obtener la expresión de la respuesta x(t) regis-trada por el aparato. b) Discutir la relación "sali-da"/"entrada" en función del valor de la frecuenciaω de la perturbación sísmica.
Designamos por x la elongación de la masa mcon respecto a la base y escribimos la ec. dif. delmovimiento de la masa m en el referencial ligadoa la base (no-inercial):
kx γx my mx ⇒ x γmx k
mx y
que, teniendo en cuenta la expresión y(t) que nos describe la oscilación de la base, i.e.,
y B sen ωt ⇒ y ω B cosωt ⇒ y ω2B senωt
queda en la forma x 2β x ω20 x ω2 B senωt α0 senωt

420 Lec. 14.- Oscilaciones amortiguadas y forzadas.
con β γ2m
ω0
km
α0 ω2 B
cuya solución estacionaria es x A sen (ωt δ)
con A ω2 B
(ω20 ω2)2 4β2ω2
tgδ 2βωω2
0 ω2
b) El cociente entre las amplitudes de las oscilaciones registrada (salida) y la de la base(entrada) viene dada por la expresión
AB
(ω / ω0)2
1 ω/ω02
24 β/ω0
2 ω/ω02
r 2
(1 r 2)2 4 ζ2 r 2
con r ωω0
ζ βω0
que hemos representado gráficamen-
Figura 14.19
te en la Figura 14.19 en función dela razón ω/ω0, entre la frecuencia deentrada y la frecuencia natural delsistema no-amortiguado, para dife-rentes valores del factor de amor-tiguamiento (ζ=β/ω0) del mismo.
En la práctica, la oscilación deentrada no suele corresponder a unaúnica frecuencia, sino que sueleconsistir en una combinación devarías frecuencias e, incluso, pre-sentar un espectro continuo defrecuencias. En estas condiciones,resulta deseable que la razón A/B
entre las amplitudes de salida y de entrada sea aproximadamente igual a la unidad en el intervalode frecuencias de entrada; entonces, se dice que instrumento presenta una respuesta plana. En laFigura 14.19 podemos observar que la respuesta es aproximadamente plana para frecuencias ωmayores que aproximadamente 2ω0 si el amortiguamiento del sistema se escoge de modo que β/ω0
quede en el intervalo de 0.6 a 0.7. Además, debemos resaltar que cuanto menor sea la frecuencianatural (ω0) del sistema, mayor será el intervalo de frecuencias de entrada (ω) en el que el instru-mento presenta una respuesta plana. Por esta razón, los sismógrafos suelen diseñarse con grandesmasas y resortes relativamente débiles.
§14.10. Impedancia de un oscilador.- Un oscilador amortiguado queda caracterizadopor su masa m, su constante elástica k y su constante de amortiguamiento γ. En las expresionesque hemos encontrado en los artículos anteriores, hemos preferido caracterizar al oscilador por sufrecuencia natural ω0 y su parámetro de amortiguamiento β, sin hacer referencia explícita a lascantidades m, k y γ. Recordemos que
[14.71]ω20
km
β γ2m
α0
F0
m

§14.10.- Impedancia de un oscilador. 421
En lo que sigue, preferiremos caracterizar el oscilador por las cantidades (m,k,γ). A partir dela expresión [14.70], en la que sustituiremos las expresiones [14.71], se obtiene
[14.72]vmáx
F0
γ2 mω k/ω 2
La cantidad que aparece en el denominador de [14.72] recibe el nombre de impedancia deloscilador, y se la designa por la letra Z. Esto es,
[14.73]Z γ2 ⎛
⎜⎝
⎞⎟⎠
mω kω
2
y, si llamamos resistencia R a la constante de amortiguamiento γ y reactancia X al término (mω -k/ω), esto es
[14.74]R ≡ γ X ≡ ⎛⎜⎝
⎞⎟⎠
mω kω
podemos escribir
Figura 14.20
[14.75]Z R 2 X 2
La relación entre Z, R y X puede representarse gráficamentecomo se indica en la Figura 14.20, donde al ángulo φ repre-senta el desfase entre la velocidad y la fuerza impulsora. Enefecto, puesto que tg δ = - cotg φ = - 1/tg φ, de
[14.76]tgδ 2βω
ω20 ω2
γkω
mω
se sigue que [14.77]tg φ
mω kω
γXR
Con esta nueva notación podemos expresar la velocidad de la masa oscilante en cualquierinstante por
Figura 14.21
[14.78]vF0
Zsen(ωt φ)
y es posible utilizar la notación fasorial, tal como se indicaen la Figura 14.21, para representar la fuerza aplicada y lavelocidad de la masa oscilante mediante los corres-pondientes fasores o vectores rotantes F y v. Observemosque si φ>0, el fasor v estará atrasado respecto al F. En laresonancia será φ=0 y ambos fasores tendrán la mismadirección y sentido. La notación fasorial simplificaconsiderablemente el estudio de las oscilaciones y, lo que esmás importante, permite una formulación general que ponede manifiesto interesantes analogías.
La potencia transferida al oscilador por la fuerzaimpulsora es

422 Lec. 14.- Oscilaciones amortiguadas y forzadas.
[14.79]P F v
F 20
Zsenωt sen(ωt φ)
F 20
Z( sen2ωt cosφ senωt cosωt senφ )
y la potencia media es
[14.80]⟨P⟩ 12
F 20
Zcosφ 1
2
F 20
ZRZ
12
F 20 R
Z 2
En la resonancia, cuando φ=0 y ω=ω0, la absorción de potencia es máxima, y puesto que Xres=0 yZres=R, tenemos
[14.81]⟨P⟩res
12
F 20
R
y la relación entre <P> y <P>res vale
Figura 14.22
[14.82]⟨P⟩⟨P⟩res
R 2
Z 2
γ2
γ2 ⎛⎜⎝
⎞⎟⎠
mω kω
2
de modo que es función de la frecuenciaimpuesta. En la Figura 14.22 hemos repre-sentado el cociente <P>/<P>res en fun-ción de la frecuencia impulsora oimpuesta ω (curva de absorción depotencia relativa).
Se define la anchura de la reso-nancia (BW=ω2 - ω1) como el intervalode frecuencias en el que la potenciaabsorbida por el sistema oscilante esigual o mayor a la mitad de la corres-pondiente a la resonancia. Para las fre-cuencias limites ω1 y ω2 tenemos
[14.83]⟨P⟩⟨P⟩res
R 2
Z 2
12
o sea [14.84]2 R 2 Z 2 R 2 X 2 ⇒ R ± X
En ω1 (<ω0) es mω1<k/ω1, de modo que tomaremos el signo negativo de [14.84] y obtendremos
[14.85]γ⎛⎜⎜⎝
⎞⎟⎟⎠
mω1
kω1
⇒ ω1 ω20 β2 β
En ω2 (>ω0) es mω2>k/ω2, de modo que tomaremos el signo positivo de [14.84] y obtendremos
[14.86]γ⎛⎜⎜⎝
⎞⎟⎟⎠
mω2
kω2
⇒ ω2 ω20 β2 β
Multiplicando ω1 y ω2 dados por esas dos expresiones, se tiene

§14.10.- Impedancia de un oscilador. 423
[14.87]ω1ω2 ω20
de modo que la frecuencia de resonancia es la media geométrica de las frecuencias que definen alancho de banda (BW).
Restando las expresiones de ω1 y ω2, se tiene
[14.88]BW ω2 ω1 2β
de modo que el ancho de banda es proporcional al amortiguamiento.
Utilizando la expresión [14.34] para el factor de calidad en la resonancia, tenemos
[14.89]Qω0
2βω0
ω2 ω1
ω0
BW
esto es, el factor de calidad
[14.90]Qω0
BWfrecuencia de resonanciaanchura de la resonancia
mide la agudeza de la resonancia, o sea, la agudeza del ajuste o sintonía entre el sistema oscilantey la frecuencia impuesta para la máxima absorción de potencia. Obsérvese que la calidad del ajusteo factor de calidad Q tiende hacia cero cuando β→∞ (mucha disipación de potencia en elrozamiento) y que tiende hacia infinito cuando β→0 (no hay disipación de potencia y la respuestaes cada vez más fuerte), lo que significa que va aumentando la energía almacenada en el osciladorsin que se disipe nada de ella.
Problemas
14.1.- Demostrar que las constantes A0 y ψ queaparecen en la expresión de la elongación deloscilador armónico amortiguado en función deltiempo [14.14] pueden expresarse en funciónde las condiciones iniciales x0 y v0 en la forma
A 20 x 2
0
⎛⎜⎜⎝
⎞⎟⎟⎠
βx0 v0
ω′
2
ψ arctg⎛⎜⎜⎝
⎞⎟⎟⎠
ω′x0
βx0 v0
con ω′2=ω20 - β2.
14.2.- a) Demostrar que las constantes A1 y A2,que aparecen en la expresión [14.38] de laelongación del oscilador sobreamortiguado,
vienen dadas en función de las condicionesiniciales x0 y v0 por
A1
v0 Ω2x0
Ω1 Ω2
A2
v0 Ω1x0
Ω1 Ω2
14.3.- Energía en las oscilaciones amortigua-das. a) Demostrar que la energía total deloscilador amortiguado varía en función deltiempo de acuerdo con la función
E 12mA 2
0 e 2βt ...
[ω′2 2β2 sen2ω′t ω′β sen2ω′t ]
y que la potencia disipada lo hace según

424 Lec. 14.- Oscilaciones amortiguadas y forzadas.
dEdt
2mA 20 βe 2βt [ω′ cosω′t β senω′t]2
b) A partir de las expresiones anteriores,calcular los valores medio, referidos a un ciclode oscilación, de la energía del oscilador y dela disipación de energía.
14.4.- Demostrar que el decremento logarítmi-co efectivo para la energía de un osciladoramortiguado es el doble del correspondiente ala amplitud.
14.5.- Un oscilador armónico amortiguado,cuya frecuencia natural es ω0=15 rad/s y cuyoparámetro de amortiguamiento es β=9 s-1, seencuentra inicialmente en reposo en la posi-ción de equilibrio. En el instante t=0 recibe unimpulso que lo pone en movimiento con unavelocidad inicial de 60 cm/s. a) Expresar laelongación del oscilador en función deltiempo. b) Calcular el máximo desplazamientoque experimenta el oscilador a partir de suposición de equilibrio. c) Calcular el tiempoque deberá transcurrir para que la amplitud delas oscilaciones amortiguadas se reduzca a un0.1 % del valor máximo anteriormente calcu-lado.
14.6.- Una masa de 0.5 kg, unida a un muellede constante elástica k=250 N/m, oscila conuna amplitud inicial de 6 cm. a) Hallar elperiodo y la energía del oscilador en el instan-te inicial. b) Determinar el valor de la cons-tante de amortiguamiento del oscilador sabien-do que la energía se disipa a razón de 1% encada ciclo.
14.7.- Un cuerpo de 2 kg de masa descansasobre un tablero horizontal y está unido alextremo libre de un muelle de constante elásti-ca k=200 N/m. En un instante dado susoscilaciones presentan una amplitud de 30 cm;dicha amplitud se reduce a la mitad cuandohan transcurrido 25 s. Con esos datos y supo-niendo un amortiguamiento viscoso, determi-nar: a) el valor del parámetro de amortigua-miento, del coeficiente de amortiguamiento ydel tiempo de relajación, b) la frecuencia y elperiodo de las oscilaciones no amortiguadas,c) ídem de las oscilaciones amortiguadas, d) eltiempo que debe transcurrir para que se disipela mitad de la energía del oscilador, e) ídem el99% de la energía del oscilador. ¿Cuál seráentonces la amplitud de las oscilaciones?
14.8.- Un oscilador está caracterizado por losparámetros siguientes: m=0.5 kg, k=50 N/m yβ=0.01 s-1. En el instante inicial la amplitud desus oscilaciones es de 0.25 m. a) Calcular el
valor de la energía que se disipa por oscilaciónen el instante inicial. b) Calcular el número deoscilaciones que habrán de completarse antesde que la energía del oscilador se hayareducido a un 1% de su valor inicial. ¿Cuántovaldrá entonces la energía perdida poroscilación?
14.9.- Un oscilador amortiguado tiene una fre-cuencia de oscilación que es tan sólo el 85%de su frecuencia natural (sin amortiguamiento).¿En qué factor disminuye su amplitud en cadaoscilación? ¿Ídem su energía?
14.10.- Un péndulo simple está constituido poruna esfera de plomo de 2 cm de diámetrosuspendida del extremo de una cuerda inexten-sible y ligera de 1 m de longitud. Analizar elefecto que produce la viscosidad del aire en elmovimiento del péndulo (esto es, determinar lainfluencia de la viscosidad sobre la amplitud yperiodo de las oscilaciones). Datos: elcoeficiente de viscosidad del aire, a 20°C, es181 µP; la densidad del plomo es11.35 g/cm3).
14.11.- La frecuencia natural de un osciladores 420 Hz, en tanto que su frecuencia amorti-guada es 416 Hz. Calcular el factor de calidadQ y el decremento logarítmico del oscilador.
14.12.- Un oscilador tiene una masa de 40 g ypresenta un periodo de 2 s. Se observa que laamplitud de sus oscilaciones disminuye en un5% cuando se completan 10 oscilaciones.a) Calcular el valor de la constante de amorti-guamiento, del decremento logarítmico y delQ del oscilador. b) ¿Qué fracción de energíase disipa en cada ciclo?
14.13.- Oscilador forzado estacionario.-Comprobar analíticamente que la potenciamedia transferida al oscilador por la fuerzaimpulsora es igual a la potencia mediadisipada en el amortiguamiento.
14.14.- El factor de calidad de un oscilador esQ=1 000 y la frecuencia de sus oscilaciones es420 Hz. a) Calcular el valor del parámetro deamortiguamiento, del decremento logarítmicoy del tiempo de relajación. b) ¿Cuántas oscila-ciones se completan durante el tiempo derelajación?
14.15.- Determinar el Q del oscilador amorti-guado cuyo movimiento está representadográficamente en la figura.
14.16.- Piano. Cuando se pulsa en el piano latecla correspondiente al do3 (ν=264 Hz), laintensidad del sonido que escuchamos dismi-nuye a la mitad de su valor inicial en aproxi-
Problemas 425
madamente 1 s. a) ¿Cuál es el Q correspon-
Prob. 14.15
diente a esa nota? b) Supongamos que la notacorrespondiente a una octava más alta, esto es,el do4 (ν=528 Hz), posea sensiblemente elmismo Q. ¿Qué tiempo deberá transcurrir paraque la intensidad del sonido emitido se reduz-ca a la mitad de su valor inicial? c) De acuer-do con los resultados anteriores y suponiendoque el Q sea el mismo para todas las notas,¿qué notas persistirán más tiempo, las agudaso las graves?
14.17.- La constante elástica de un oscilador esk=90 dyn/cm, su parámetro de amortiguamien-to es β=3 s-1 y su masa es m=10 g. La masa seencuentra inicialmente en reposo en laposición de equilibrio; entonces, una fuerzaimpulsiva le comunica una velocidad de60 cm/s. Calcular el desplazamiento máximode la masa respecto a su posición de equili-brio.
14.18.- Consideremos de nuevo el osciladordel Problema 14.17. Supongamos que la masaoscilante se encuentre en el instante inicial auna distancia de 4 cm de su posición de equili-brio, y que se mueva con una velocidad de60 cm/s en dirección hacia ella. ¿Rebasará laposición de equilibrio? Descríbasedetalladamente el movimiento.
14.19.- Repetir el Problema 14.17 para el casoen que β=5 s-1.
14.20.- Cuando una partícula cargada está enmovimiento acelerado irradia energía electro-magnética. De acuerdo con la teoría electro-magnética clásica (no-relativista), la energíairradiada por unidad de tiempo y que atraviesauna esfera de radio r centrada en la partículacargada en movimiento viene dada por lafórmula de LARMOR:
dEdt
q 2a 2
6π 0c3
donde 0 es la permitividad del vacío( 0=8.854 × 10-12 C/N m2), c es la velocidad
de la luz en el vacío (c=2.9979 x 108 m/s) y qy a son, respectivamente, la carga (coulombs)y la aceleración (m/s2) de la partícula cargada.
Consideremos una partícula cargada, demasa m y carga q, que oscile a lo largo de unarecta, con una amplitud A y una frecuencia νy supóngase que su movimiento quede descritopor x = A sen 2πνt durante un ciclo cualquieradel movimiento. a) ¿Qué cantidad de energíase irradia por ciclo? b) ¿Cuál es el factor decalidad Q de este oscilador? c) ¿Cuál es eltiempo de relajación del oscilador? ¿Cuántasoscilaciones deberá realizar la partícula carga-da antes de que su energía se reduzca a lamitad de su valor inicial?
APLICACIÓN NUMÉRICA: Considérese que lapartícula oscilante sea un electrón (e=1.602 ×10-19 C, m=9.106 × 10-31 kg) que oscile conuna frecuencia óptica típica (en el visible) de6 × 1014 Hz.
14.21.- Un fardo que pesa 300 kg cae desde
Prob. 14.21
una altura de 2.5 m sobre una plataforma hori-zontal de masa despreciable. Deseamos diseñarun dispositivo resorte-amortiguador, sobre elque montaremos la plataforma, de tal modoque tras el impacto ésta se sitúe en una po-sición de equilibrio12.1 cm por debajode la posicióninicial tan rápida-mente como seaposible. a) Calcularl a c o n s t a n t eelástica k del resor-te y el coeficientede amortiguamientoγ del sistema.b) ¿Se rebasará laposición de equili-brio? En caso afir-mativo, calcular eldescenso máximode la plataforma.c) ¿Qué tiempo empleará la plataforma paraencontrarse a 1 mm de su posición final?d) Calcular la altura máxima desde la quepuede caer el fardo para que no se rebase laposición inicial final de equilibrio.
14.22.- Con los mismos datos del Proble-ma 14.21, deseamos ahora que no se rebase laposición final de equilibrio. a) ¿Cuál será elvalor mínimo del coeficiente de amortigua-miento γ del sistema? b) ¿Qué tiempo emplea-rá, ahora la plataforma hasta encontrarse a1 mm de su posición final?

426 Lec. 14.- Oscilaciones amortiguadas y forzadas.
14.23.- Una masa de 0.25 kg está unida a unmuelle cuya constante elástica es k=200 N/m,siendo la constante de amortiguamientoγ=3 kg/s. La masa está impulsada por unafuerza externa F=5 sen 30t (N). a) ¿Cuál es laamplitud de las oscilaciones? ¿Cuál es elángulo de desfase entre la fuerza impulsora yel desplazamiento? b) Si se varía la frecuenciade la fuerza impulsora, ¿a qué frecuencia seproducirá la resonancia en amplitud? ¿Cuálserá la amplitud de las oscilaciones en laresonancia?
14.24.- Un oscilador forzado (sin amortigua-miento) está constituido por un muelle deconstante elástica k=450 N/m y una masa de2 kg. Se le aplica una fuerza impulsora sinu-soidal, cuyo valor máximo es 20 N, siendo sufrecuencia ω=3 rad/s. a) ¿Cuál será la ampli-tud de las oscilaciones? ¿Y el periodo de lasmismas? b) ¿Qué energía quedará almacenadaen el oscilador en el estado estacionario?c) ¿Qué potencia media absorbe el osciladoren el estado estacionario) d) Repetir los tresapartados anteriores para una fuerza impulsoraF=20 sen 16t (N).
14.25.- Un oscilador armónico no amortiguadoestá constituido por una masa m=100 g unidaa un muelle de constante elásticak=40 000 dyn/cm. Se le aplica una fuerzaimpulsora F=3 000 sen 10t (dyn). Calcular laamplitud de las oscilaciones del oscilador en elestado estacionario y el desfase entre la fuerzaimpulsora y la velocidad.
14.26.- La mayor parte de los motores eléctri-
Prob. 14.26
cos comerciales no están perfectamente equili-brados, de modo que, cuando el motor está enmarcha, se producen vibraciones de la mismaf r e c u e n c i aangular quela del rotor.D e s e a m o sabsorber esasvibraciones,para lo quecolocamos elmotor sobrecuatro amor-t iguadores ,c o m o s emuestra en la figura. Sea m la masa del motory ω su velocidad angular, ¿cuál será el valormás idóneo de la constante elástica k de cadauno de los amortiguadores para el fin propues-to?
14.27.- Se cuelga un objeto de 2 kg de masadel extremo inferior de un muelle de masadespreciable. En esas condiciones, el muelle se
alarga 6 cm. Hacemos oscilar hacia arriba yhacia bajo el extremo superior del muelle, conun movimiento armónico simple de 1 mm deamplitud. La Q del sistema es 20. a) ¿Cuáldeberá ser la frecuencia de las oscilaciones delextremo superior del muelle para que seamáxima la amplitud de las oscilaciones delobjeto? b) ¿Cuánto valdrá dicha amplitudmáxima? c) ¿Qué potencia está suministrandola fuerza impulsora?
14.28.- En el oscilador del Problema 14.27, su-póngase ahora que la frecuencia de la fuerzaimpulsora es ω=2ω0. a) ¿Cuál será la amplitudde las oscilaciones del objeto suspendido?b) ¿Qué potencia suministra la fuerza impulso-ra?
14.29.- Un oscilador amortiguado está caracteri-zado por su masa m=10 g, su constante elás-tica k=360 dyn/cm y su constante de amor-tiguamiento γ=40 g/s. Se le aplica al osciladoruna fuerza impulsora de 15 rad/s de frecuenciaangular y 400 dyn de amplitud. a) Averiguarsi el oscilador está infra o sobreamortiguado.b) Calcular la impedancia del oscilador a lafrecuencia impuesta y el desfase angular entrela velocidad y la fuerza aplicada. c) Calcular la"amplitud" de la velocidad. d) Calcular laamplitud de la elongación. e) Dibujar losesquemas fasoriales convenientes.
14.30.- En el dispositivo que se muestra en la
Prob. 14.30
figura, determinar los parámetros del muelle-amortiguador equivalente (keq, γeq), así como lafrecuencia natural y la de las oscilacionesamortiguadas del oscilador.
14.31.- En el sistema que se muestra en la
Prob. 14.31
figura, todos los muelles tienen la misma
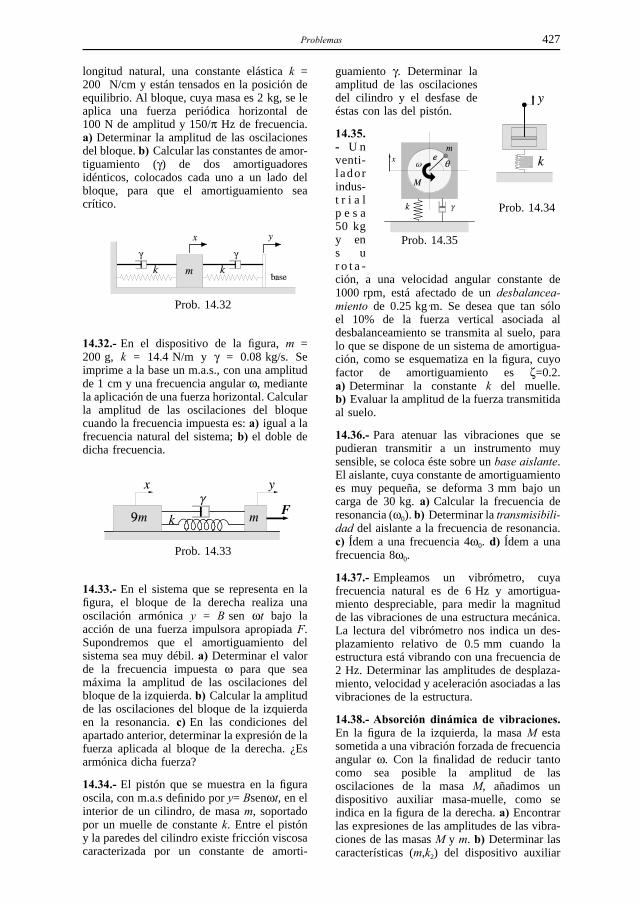
Problemas 427
longitud natural, una constante elástica k =200 N/cm y están tensados en la posición deequilibrio. Al bloque, cuya masa es 2 kg, se leaplica una fuerza periódica horizontal de100 N de amplitud y 150/π Hz de frecuencia.a) Determinar la amplitud de las oscilacionesdel bloque. b) Calcular las constantes de amor-tiguamiento (γ) de dos amortiguadoresidénticos, colocados cada uno a un lado delbloque, para que el amortiguamiento seacrítico.
14.32.- En el dispositivo de la figura, m =
Prob. 14.32
200 g, k = 14.4 N/m y γ = 0.08 kg/s. Seimprime a la base un m.a.s., con una amplitudde 1 cm y una frecuencia angular ω, mediantela aplicación de una fuerza horizontal. Calcularla amplitud de las oscilaciones del bloquecuando la frecuencia impuesta es: a) igual a lafrecuencia natural del sistema; b) el doble dedicha frecuencia.
14.33.- En el sistema que se representa en la
Prob. 14.33
figura, el bloque de la derecha realiza unaoscilación armónica y = B sen ωt bajo laacción de una fuerza impulsora apropiada F.Supondremos que el amortiguamiento delsistema sea muy débil. a) Determinar el valorde la frecuencia impuesta ω para que seamáxima la amplitud de las oscilaciones delbloque de la izquierda. b) Calcular la amplitudde las oscilaciones del bloque de la izquierdaen la resonancia. c) En las condiciones delapartado anterior, determinar la expresión de la
Prob. 14.34
fuerza aplicada al bloque de la derecha. ¿Esarmónica dicha fuerza?
14.34.- El pistón que se muestra en la figuraoscila, con m.a.s definido por y= Bsenωt, en elinterior de un cilindro, de masa m, soportadopor un muelle de constante k. Entre el pistóny la paredes del cilindro existe fricción viscosacaracterizada por un constante de amorti-
guamiento γ. Determinar laamplitud de las oscilacionesdel cilindro y el desfase deéstas con las del pistón.
14.35.
Prob. 14.35
- U nventi-l adorindus-t r i a lp e s a50 kgy ens ur o t a -ción, a una velocidad angular constante de1000 rpm, está afectado de un desbalancea-miento de 0.25 kg m. Se desea que tan sóloel 10% de la fuerza vertical asociada aldesbalanceamiento se transmita al suelo, paralo que se dispone de un sistema de amortigua-ción, como se esquematiza en la figura, cuyofactor de amortiguamiento es ζ=0.2.a) Determinar la constante k del muelle.b) Evaluar la amplitud de la fuerza transmitidaal suelo.
14.36.- Para atenuar las vibraciones que sepudieran transmitir a un instrumento muysensible, se coloca éste sobre un base aislante.El aislante, cuya constante de amortiguamientoes muy pequeña, se deforma 3 mm bajo uncarga de 30 kg. a) Calcular la frecuencia deresonancia (ω0). b) Determinar la transmisibili-dad del aislante a la frecuencia de resonancia.c) Ídem a una frecuencia 4ω0. d) Ídem a unafrecuencia 8ω0.
14.37.- Empleamos un vibrómetro, cuyafrecuencia natural es de 6 Hz y amortigua-miento despreciable, para medir la magnitudde las vibraciones de una estructura mecánica.La lectura del vibrómetro nos indica un des-plazamiento relativo de 0.5 mm cuando laestructura está vibrando con una frecuencia de2 Hz. Determinar las amplitudes de desplaza-miento, velocidad y aceleración asociadas a lasvibraciones de la estructura.
14.38.- Absorción dinámica de vibraciones.En la figura de la izquierda, la masa M estasometida a una vibración forzada de frecuenciaangular ω. Con la finalidad de reducir tantocomo sea posible la amplitud de lasoscilaciones de la masa M, añadimos undispositivo auxiliar masa-muelle, como seindica en la figura de la derecha. a) Encontrarlas expresiones de las amplitudes de las vibra-ciones de las masas M y m. b) Determinar lascaracterísticas (m,k2) del dispositivo auxiliar
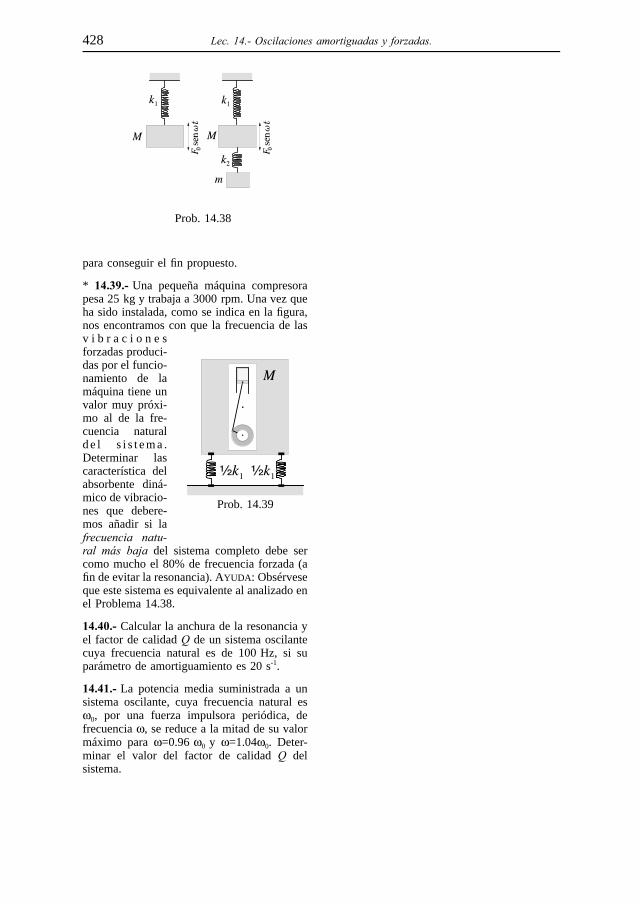
428 Lec. 14.- Oscilaciones amortiguadas y forzadas.
para conseguir el fin propuesto.
Prob. 14.38
* 14.39.- Una pequeña máquina compresora
Prob. 14.39
pesa 25 kg y trabaja a 3000 rpm. Una vez queha sido instalada, como se indica en la figura,nos encontramos con que la frecuencia de lasv i b r a c i o n e sforzadas produci-das por el funcio-namiento de lamáquina tiene unvalor muy próxi-mo al de la fre-cuencia naturald e l s i s t e m a .Determinar lascaracterística delabsorbente diná-mico de vibracio-nes que debere-mos añadir si lafrecuencia natu-ral más baja del sistema completo debe sercomo mucho el 80% de frecuencia forzada (afin de evitar la resonancia). AYUDA: Obsérveseque este sistema es equivalente al analizado enel Problema 14.38.
14.40.- Calcular la anchura de la resonancia yel factor de calidad Q de un sistema oscilantecuya frecuencia natural es de 100 Hz, si suparámetro de amortiguamiento es 20 s-1.
14.41.- La potencia media suministrada a unsistema oscilante, cuya frecuencia natural esω0, por una fuerza impulsora periódica, defrecuencia ω, se reduce a la mitad de su valormáximo para ω=0.96 ω0 y ω=1.04ω0. Deter-minar el valor del factor de calidad Q delsistema.

15.- Superposición demovimientos armónicos simples.
§15.1. Principio de superposición (429); §15.2. Teorema de Fourier (432);§15.3. Convergencia de las series de Fourier (436); §15.4. Fuerzas impulsoras periódicas(436); §15.5. Superposición de dos m.a.s. en una dimensión (439); §15.6. Superposiciónde dos m.a.s. en direcciones perpendiculares (444); Problemas (452)
§15.1. Principio de superposición.- Las oscilaciones que hemos estudiado enlas lecciones precedentes obedecen a una ecuación diferencial de la forma
[15.1]mx γx kx F(t)
que es una ecuación diferencial de segundo orden, lineal, no homogénea y decoeficientes constantes. Ya hemos aclarado anteriormente el significado de cada unode esos términos. Insistiremos ahora en uno de ellos: la ecuación diferencial delmovimiento del oscilador armónico amortiguado y forzado es lineal; i.e., no contienepotencias superiores a la primera en x, x y x. Así pues, es lineal en x y en susderivadas respecto al tiempo. Podemos escribir [15.1], simbólicamente, en la forma
[15.2]⎛⎜⎜⎝
⎞⎟⎟⎠
m d2
dt 2γ d
dtk x F(t)
La cantidad entre paréntesis es un operador diferencial lineal, que representaremospor L, de modo que, con notación compacta, podemos escribir
[15.3]L x F(t)
Los operadores diferenciales lineales poseen la propiedad distributiva respectoa la suma de funciones; esto es
[15.4]L (x1 x2) L x1 L x2
y también poseen la propiedad asociativa respecto al producto de una función por unaconstante, de modo que, si es c una constante, será
Manuel R. Ortega Girón 429

430 Lec. 15.- Superposición de movimientos armónicos simples.
[15.5]L(cx) c L x
Como consecuencia de esas propiedades se sigue el Principio de Superposición,de modo que si tenemos dos soluciones, x1(t) y x2(t), de la ecuación diferencial [15.1],correspondientes a dos funciones de fuerza, F1(t) y F2(t), diferentes, esto es
[15.6]L x1 F1(t) L x2 F2(t)
entonces, podemos sumar esas dos soluciones, multiplicadas por sendas constantesarbitrarias, c1 y c2, y obtener
[15.7]L ( c1x1 c2x2 ) c1 F1(t) c2 F2(t)
Es decir,
las soluciones de la ecuación diferencial del movimiento del oscilador [15.1],correspondientes a diferentes fuerzas impulsoras, son aditivas.
Esto significa que si conocemos el movimiento x1(t) del oscilador bajo la acciónde una fuerza impulsora única F1(t) y el movimiento x2(t) debido tan sólo a unafuerza impulsora F2(t), el movimiento que resultará bajo la acción conjunta de esasdos fuerzas impulsoras se obtendrá, sencillamente, sumando x1(t) y x2(t).
Naturalmente, podemos extender la argumentación anterior para un conjunto desoluciones xn(t), con n=1, 2, 3, ... N, de la ecuación diferencial del oscilador,correspondientes, cada una de ellas, a una fuerza Fn(t) apropiada. El Principio deSuperposición nos permite asegurar que el movimiento resultante bajo la acciónconjunta de N fuerzas impulsoras
[15.8]F(t)N
n 1
Fn(t)
es simplemente [15.9]x(t)N
n 1
xn(t)
Así pues, estamos en condiciones de encontrar una solución particular de laecuación diferencial del movimiento del oscilador [15.1] para una fuerza impulsoracualquiera F(t), con tal que sepamos expresar dicha fuerza como una suma de fuerzasFn(t) para las que conozcamos las soluciones correspondientes xn(t). En particular, sicada una de las fuerzas Fn(t) es armónica, de modo que podamos expresar F(t) en laforma
[15.10]F(t)N
n 1
cn sen(ωnt θn)
donde cn (n= 1, 2, ... N) son constantes escalares que representan las intensidadesmáximas de las Fn(t) respectivas1 y θn son los correspondientes ángulos de fase
1 Rehusamos la notación F0,n para evitar el doble subíndice.

§15.1.- Principio de superposición. 431
iniciales; entonces la solución particular de la ecuación diferencial del oscilador(amortiguamiento débil), correspondiente al estado estacionario, será
[15.11]x(t) ≡ x(t τ) 1m
N
n 1
cn
(ω20 ω2
n)2 4β2ω2
n
sen(ωnt θn δn)
con [15.12]δn arctg2βωn
ω20 ω2
n
y la solución general, incluido el efecto transitorio, será
[15.13]x(t) A0 eβt sen(ω′t ψ) 1
m
N
n 1
cn sen(ωnt θn δn)
(ω20 ω2
n)2 4β2ω2
n
donde A0 y ψ son dos constantes "arbitrarias" que deberemos evaluar a partir de lascondiciones iniciales (x0,v0) y ω′ es la frecuencia angular de las oscilacionesamortiguadas en ausencia de fuerza impulsora alguna, es decir,
[15.14]ω′ ω20 β2
Es obvio que podemos escribir una solución similar a la [15.11] o a la [15.13] parael caso en que F(t) esté representada por una serie de cosenos, cos(ωn+θn). Por otraparte, puesto que
[15.15]cnsen(ωnt θn) cnsenωnt cosθn cncosωnt senθn ancosωnt bnsenωnt
con
Figura 15.1
[15.16]an cn senθn bn cn cosθn
y
[15.17]cn a 2n b 2
n θn arctganbn
podemos escribir la expresión [15.10] en una forma másconveniente, en la que no aparezcan los ángulos de desfase θn; esto es
[15.18]F(t)N
n 1
(an cosωnt bnsenωnt)
que es equivalente a la expresión [15.10]. La solución de la ec. dif. del osciladorforzado, correspondiente al estado estacionario, puede escribirse entonces en la forma
[15.19]x(t) ≡ x(t τ) 1m
N
n 1
ancos(ωnt δn) bnsen(ωnt δn)
(ω20 ω2
n)2 4β2ω2
n

432 Lec. 15.- Superposición de movimientos armónicos simples.
Este resultado puede condensarse en el enunciado siguiente:
Si la fuerza impulsora F(t) puede expresarse como una serie (finita oinfinita) de términos armónicos, entonces, la ecuación del movimiento x(t)también puede expresarse como una serie de términos armónicos.
Este resultado es muy interesante, ya que, de acuerdo con el Teorema deFOURIER (1768-1830), cualquier función periódica (sujeta a ciertas condiciones queno son demasiado restrictivas) puede desarrollarse en una serie de términosarmónicos.
§15.2. Teorema de Fourier.- Una función F(t) es periódica si existe una cons-tante T, llamada periodo, tal que para todo valor de t=ξ es
[15.20]F(ξ T) F(ξ)
como se muestra en la Figura 15.2.El teorema de Fourier establece que bajo ciertas condiciones (que se suelen cum-
plir en la práctica para un gran número de funciones) una función periódica, deperiodo T, definida en el intervalo puede desarrollarse como una sumaξ < t < ξ Tde términos armónicos, cuyas frecuencias son múltiplos enteros de la frecuenciaω=2π/T, en la forma
[15.21]F(t)a0
2
∞
n 1
(ancosnωt bnsennωt)
donde los coeficientes a0, an y bn (n = 1, 2,
Figura 15.2
... ∞) reciben el nombre de coeficientes deFourier. La frecuencia ω (que es la másbaja) se denomina frecuencia fundamental, ylas frecuencias 2ω, 3ω, ... son las frecuen-cias armónicas o sobretonos. Una vez deter-minados los coeficientes an y bn, de modoque la serie [15.21] sea convergente y susuma sea F(t), la serie [15.21] recibe el nom-bre de serie de Fourier de la función F(t).
Para calcular los coeficientes a0, an y bn,tendremos en cuenta que, para todo ξ y todonúmero natural n, son:
[15.22]
⌡⌠
ξ T
ξ
sen nωt dt 0 ⌡⌠
ξ T
ξ
cos nωt dt 0
⌡⌠
ξ T
ξ
sen2 nωt dt T2 ⌡
⌠ξ T
ξ
cos2 nωt dt T2
y que para todo m ≠ n (m y n naturales) son:

§15.2.- Teorema de Fourier. 433
[15.23]⌡⌠
ξ T
ξ
sen mωt sen nωt dt 0 ⌡⌠
ξ T
ξ
cos mωt cos nωt dt 0
⌡⌠
ξ T
ξ
sen mωt cos nωt dt 0
En el supuesto de que exista el desarrollo de Fourier [15.21] de la función F(t) yde que la serie correspondiente sea uniformemente convergente en el intervaloξ<t<ξ+T, será lícito integrar, entre los extremos de dicho intervalo, los dos miembrosde [15.21]; entonces, utilizando las expresiones [15.22], nos queda
[15.24]⌡⌠
ξ T
ξ
F(t) dta0
2T
∞
n 1(an 0 bn 0)
de donde se sigue que [15.25]a0
2T ⌡
⌠ξ T
ξ
F(t) dt
Para determinar los coeficientes an, multiplicaremos por cosnωt (n, natural)ambos miembros de [15.21] e integraremos en el intervalo (ξ,ξ+T):
[15.26]⌡⌠
ξ T
ξ
F(t) cos nωt dta0
20 an ⌡
⌠ξ T
ξ
cos2 nωt dt 0 0 anT2
de modo que [15.27]an2T ⌡
⌠ξ T
ξ
F(t) cos nωt dt
y, análogamente, multiplicando ambos miembros de [15.21] por sen nωt e integrando,se obtienen los coeficientes bn:
[15.28]bn2T ⌡
⌠ξ T
ξ
F(t) sen nωt dt
Puesto que todos los términos del desarrollo de Fourier tienen el periodo T, si laserie converge hacia F(t) en el intervalo (ξ,ξ+T) también convergerá hacia F(t) paratodos los valores de t. En consecuencia, la serie de Fourier puede servir pararepresentar funciones definidas sólo en el intervalo (ξ,ξ+T) o definidas para todovalor de t, siempre que la función sea periódica, de periodo T.
El cálculo de los coeficientes de Fourier se simplifica notablemente si ξ=-T/2 yla función F(t) es impar o par en el intervalo (-T/2,T/2).
Una función es impar (Figura 15.3a), en un intervalo centrado en el origen, si entodo ese intervalo es F(t) = -F(-t). Para una función impar, definida en el intervalo(-T/2,T/2), poniendo t′=-t, se tiene
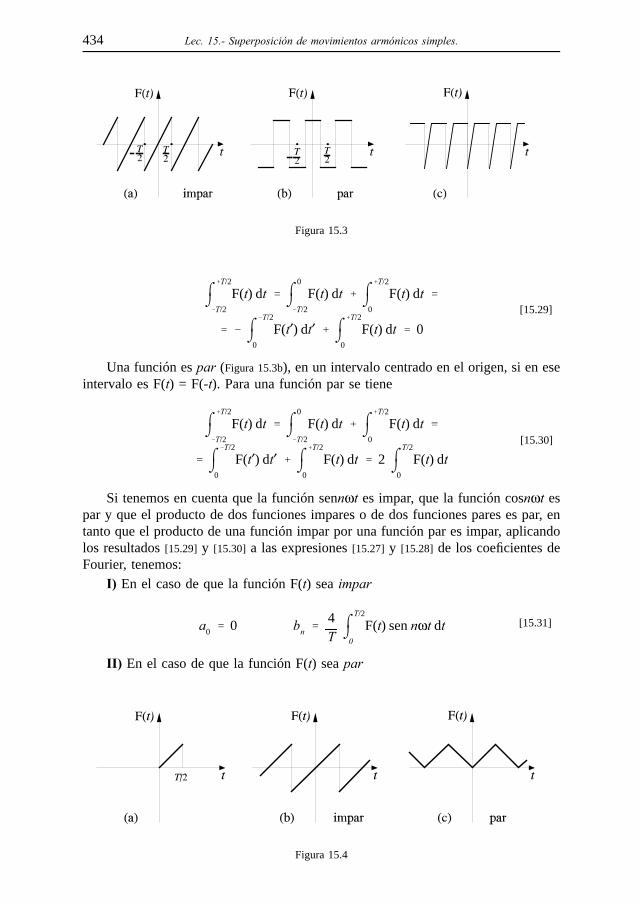
434 Lec. 15.- Superposición de movimientos armónicos simples.
Figura 15.3
[15.29]⌡⌠
T/2
T/2
F(t) dt ⌡⌠
0
T/2
F(t) dt ⌡⌠
T/2
0
F(t) dt
⌡⌠
T/2
0
F(t′) dt′ ⌡⌠
T/2
0
F(t) dt 0
Una función es par (Figura 15.3b), en un intervalo centrado en el origen, si en eseintervalo es F(t) = F(-t). Para una función par se tiene
[15.30]⌡⌠
T/2
T/2
F(t) dt ⌡⌠
0
T/2
F(t) dt ⌡⌠
T/2
0
F(t) dt
⌡⌠
T/2
0
F(t′) dt′ ⌡⌠
T/2
0
F(t) dt 2 ⌡⌠T/2
0
F(t) dt
Si tenemos en cuenta que la función sennωt es impar, que la función cosnωt es
Figura 15.4
par y que el producto de dos funciones impares o de dos funciones pares es par, entanto que el producto de una función impar por una función par es impar, aplicandolos resultados [15.29] y [15.30] a las expresiones [15.27] y [15.28] de los coeficientes deFourier, tenemos:
I) En el caso de que la función F(t) sea impar
[15.31]a0 0 bn4T ⌡
⌠T/2
0
F(t) sen nωt dt
II) En el caso de que la función F(t) sea par

§15.2.- Teorema de Fourier. 435
[15.32]an4T ⌡
⌠T/2
0
F(t) cos nωt dt bn 0
Es decir, las respectivas series de Fourier se reducen a una serie de senos si F(t) esimpar, o de cosenos si F(t) es par. Si F(t) no es ni impar ni par, su serie de Fouriercontendrá términos de ambos tipos. En la Figura 15.3 mostramos un ejemplo defunciones periódicas impar, par y ni-par-ni-impar.
Si la función F(t) está definida tan sólo en medio periodo, esto es, en el intervalo(0,T/2), como se muestra en la Figura 15.4a, cabe desarrollarla como función impar(serie de senos), como se muestra en la Figura 15.4b, o como función par (serie decosenos), como se muestra en la Figura 15.4c.
Ejemplo I.- Función en dientes de sierra.- En la
Figura 15.5
Figura 15.5 mostramos la representación gráfica deuna función en dientes de sierra. Se trata de unafunción impar, puesto que F(t) = -F(-t), cuya expre-sión analítica es:
F(t) 2ATt T
2≤ t ≤ T
2
Puesto que la función F(t) es impar, todos los coefi-cientes an de su serie de Fourier son nulos y lafunción en dientes de sierra es desarrollable en serie de senos. Los coeficientes bn vienen dados por[15.31]:
bn4T ⌡
⌠T/2
0
F(t) sen nωt dt 2ω2Aπ2 ⌡
⌠π/ω
0
t sen nωt dt
2ω2Aπ2
⎛⎜⎝
⎞⎟⎠
t cos nωtnω
sen nωtn 2ω2
π/ω
0
2ω2Aπ2
⎛⎜⎝
⎞⎟⎠
πnω2
cos nπ 2Anπ
( 1)n 1
donde el factor (-1)n+1 tiene en cuenta que
Figura 15.6
cos nπ⎧⎨⎩
1 si n es par1 si n es impar

436 Lec. 15.- Superposición de movimientos armónicos simples.
El desarrollo en serie de Fourier de la función en dientes de sierra es
F(t) 2Aπ
⎛⎜⎝
⎞⎟⎠
senωt 12
sen2ωt 13
sen3ωt ...
En la Figura 15.6 representamos gráficamente la expansión en serie de Fourier de la función endientes de sierra para 2, 4 y 8 términos del desarrollo, respectivamente. Evidentemente, cuantos mástérminos tomemos, tanto mejor se ajustará la serie de Fourier a la función F(t) que representa.
§15.3. Convergencia de las series de Fourier.- El estudio de la convergenciade la serie de Fourier para una función dada escapa de los propósitos de este libro.Así que nos limitaremos a exponer, sin demostración, las condiciones que son sufi-cientes para las funciones que normalmente aparecen en las aplicaciones prácticas.
(1) La función F(t) deberá estar definida en el intervalo ξ<t<ξ+T.
(2) La función F(t) y su derivada dF(t)/dt deberán ser continuas o casi conti-nuas en el intervalo de definición (Figura 15.7);
es decir, sólo podrán tener un número
Figura 15.7
finito de discontinuidades de primeraespecie (de modo que existan los límitesF(ξi-) por la izquierda y F(ξi+) por la dere-cha), y sólo podrá tener un número finitode máximos y mínimos en dicho intervalode definición.
Si se satisfacen estas condiciones,llamadas condiciones de DIRICHLET
(1805-1859), la serie de Fourier convergehacia F(t) en todos los puntos de continuidad y hacia [F(ξi-)+F(ξi+)]/2 en los puntosde discontinuidad.
§15.4. Fuerzas impulsoras periódicas.- El teorema de Fourier nos permiteresolver, al menos en principio, el problema del oscilador forzado para cualquierfuerza impulsora que varía periódicamente con el tiempo. Bastará desarrollar lafunción F(t), correspondiente a la fuerza impulsora, en serie de Fourier en la forma[15.21]; esto es,
[15.33]F(t)a0
2
∞
n 1
(ancosnωt bnsennωt)
Entonces, la solución de la ecuación diferencial del oscilador forzado conamortiguamiento, en lo que concierne al estado estacionario, se obtiene de [15.19] sinmás que poner ωn=nω; esto es,
[15.34]x(t) ≡ x(t τ) 1m
∞
n 1
ancos(nωt δn) bnsen(nωt δn)
(ω20 n 2ω2)2 4β2n 2ω2

§15.4.- Fuerzas impulsoras periódicas. 437
donde ω=2π/T, siendo T el periodo de la fuerza impulsora, an y bn son loscoeficientes de Fourier correspondientes al desarrollo de F(t) y δn viene dada por
[15.35]δn arctg 2βnωω2
0 n 2ω2
Es evidente que el cálculo de la solución, por este método, será bastante laboriosoen la mayoría de los casos; sin embargo, el simple convencimiento de que talsolución existe puede resultarnos de bastante utilidad.
La solución [15.34] correspondiente al estado estacionario puede escribirse en laforma
[15.36]x(t)∞
n 1
(An cos nωt Bnsen nωt)
con
[15.37]
Anancosδn bnsenδn
m (ω20 n 2ω2)2 4β2n 2ω2
Bnansenδn bncosδn
m (ω20 n 2ω2)2 4β2n 2ω2
donde An y Bn representan, obviamente, los coeficientes de Fourier correspondientesal desarrollo de la función x(t). La solución o respuesta en la elongación correspon-diente al estado estacionario es periódica, con la misma frecuencia fundamental y lasmismas frecuencias armónicas que la fuerza impulsora, aunque no con las mismasamplitudes relativas. Es decir, el espectro de amplitudes relativas correspondiente ala fuerza impulsora no será semejante, en general, al espectro correspondiente a lasamplitudes de los armónicos de la respuesta en elongación. Para comprobar que esasí, téngase en cuenta que la amplitud de cada armónico, de la fuerza impulsora y dela elongación, es
[15.38]cn a 2n b 2
n Cn A 2n B 2
n
y que de [15.37], elevando al cuadrado las expresiones An y Bn y sumando, resulta
[15.39]Cncn
m (ω20 n 2ω2)2 4β2n 2ω2
de modo que la relación entre Cn y cn no es de simple proporcionalidad.En la Figura 15.8a hemos representado los espectros de amplitudes relativas
correspondientes a una fuerza impulsora en dientes de sierra (vide Ejemplo I) y a surespuesta en elongación para un oscilador cuya frecuencia natural sea ω0=2.5ω y unamortiguamiento β=ω0/10. Se observará la falta de proporcionalidad que existe entrelas amplitudes de los armónicos correspondientes de la fuerza impulsora y de la

438 Lec. 15.- Superposición de movimientos armónicos simples.
respuesta en elongación.
Figura 15.8
Una situación crítica, realmente interesante, se presenta cuando alguna de lasfrecuencias de los armónicos de la fuerza impulsora (nω) coincide o está muypróxima a la frecuencia natural del oscilador (Figura 15.8b). Entonces, la amplitud dela respuesta (Cn) correspondiente a dicho armónico será mucho mayor que lasamplitudes de los restantes armónicos, sobre todo si el amortiguamiento es muy débil.En estas condiciones, de [15.35] y [15.39] se sigue
[15.40]δnπ2
Cncn
2mβ nω0
que es la amplitud correspondiente a la resonancia del armónico nω de la fuerzaimpulsora con la frecuencia natural del oscilador débilmente amortiguado2 (β«ω0),que podrá llegar a ser muy grande si el amortiguamiento es muy débil (β→0).
Obsérvese que una fuerza periódica no sinusoidal, cuya frecuencia (fundamental)sea ω0/n (n, natural) puede forzar en el oscilador una oscilación casi sinusoidal(m.a.s.) con su frecuencia natural ω0. Este es el caso, por ejemplo, cuandoempujamos un columpio con una fuerza impulsiva a intervalos regulares de tiempoque sean múltiplos de su periodo natural.
Una generalización del teorema de la serie de Fourier es el Teorema de la Integral de Fourier, quenos permite representar cualquier función no periódica, que cumpla ciertas condiciones, como unasuperposición de funciones armónicas. La diferencia fundamental entre el teorema de la serie de Fouriery el de la integral de Fourier estriba en que en éste, en lugar de representarse la función mediante unespectro discreto de términos armónicos (de frecuencia ω, 2ω, 3ω, ...), se representará mediante unespectro continuo de frecuencias. La amplitud correspondiente a cada frecuencia está dada por una funciónllamada transformada de Fourier de la función dada. Por medio de la serie e integral de Fourier puederesolverse la ecuación diferencial del oscilador para casi todas las fuerzas F(t) físicamente posibles. Noinsistiremos más sobre el tema; nos bastará recordar que aun cuando el cálculo resulte demasiado complejo
2 Al considerarlo débilmente amortiguado no es necesario distinguir entre las frecuencias deresonancia en amplitud y en absorción de potencia.

§15.4.- Fuerzas impulsoras periódicas. 439
en la mayoría de los casos, ya es bastante útil de por sí que sepamos que siempre será posible encontrarla solución.
§15.5. Superposición de dos m.a.s. en una dimensión.- De acuerdo conel principio de superposición, las soluciones de la ecuación diferencial delmovimiento del oscilador [15.1], correspondientes a diferentes fuerzas impulsoras, sonaditivas. Ya hemos visto lo que eso significa y como el teorema de Fourier nospermite resolver el problema del oscilador para cualquier fuerza impulsora periódica.
Vamos a estudiar ahora un problema mucho más sencillo. Nos interesaremos enla respuesta en elongación de un oscilador, en el estado estacionario, que correspondea la acción conjunta de dos fuerzas impulsoras armónicas, cuyas frecuencias serán ω1
y ω2, que actúan en una misma dirección (problema unidimensional). Las respuestasa esas dos fuerzas, por separado, serán
[15.41]
⎧⎪⎨⎪⎩
x1(t) A1sen(ω1t ψ1 )
x2(t) A2sen(ω2t ψ2 )
y la elongación o respuesta resultante de la superposición de esos dos movimientosarmónicos simples será sencillamente
[15.42]x(t) x1(t) x2(t) A1sen(ω1t ψ1 ) A2sen(ω2t ψ2 )
A continuación, discutiremos las características de esa respuesta para tres casos deinterés.
§15.5.a. Frecuencias iguales.- Esto es, ω1=ω2=ω. En este caso, el movimientoresultante es un m.a.s. de la misma frecuencia (ω). Para comprobar que es así,determinaremos su amplitud (A) y su ángulo de fase inicial (ψ) desarrollando lasexpresiones [15.41]
[15.43]
⎧⎪⎨⎪⎩
x1(t) A1sen(ωt ψ1 ) A1senωt cosψ1 A1cosωt senψ1
x2(t) A2sen(ωt ψ2 ) A2senωt cosψ2 A2cosωt senψ2
y sumándolas
[15.44]x (A1cosψ1 A2cosψ2) senωt (A1senψ1 A2senψ2) cosωt
La respuesta resultante será de la forma
[15.45]x A sen(ωt ψ ) A senωt cosψ A cosωt senψ
e identificando las expresiones [15.44] y [15.45] se tiene
[15.46]
⎧⎪⎨⎪⎩
A senψ A1 senψ1 A2 senψ2
A cosψ A1 cosψ1 A2 cosψ2

440 Lec. 15.- Superposición de movimientos armónicos simples.
de donde se sigue
Figura 15.9
[15.47]A 2 A 21 A 2
2 2A1A2cos ψ1 ψ2 tgψA1 senψ1 A2 senψ2
A1 cosψ1 A2 cosψ2
expresiones que nos permiten calcular la amplitud (A) y al ángulo de fase inicial (ψ)del m.a.s. resultante. En la Figura 15.9a hemos representado gráficamente el resultadode sumar dos sinusoides de la misma frecuencia (ω) con un desfase relativoψ1-ψ2=30°.
Podemos llegar al mismo resultado de un modo menos engorroso utilizando larepresentación fasorial del m.a.s.. Representaremos cada m.a.s. componente, x1 y x2,por un fasor (Figura 15.9b); esto es, por un vector rotatorio que gira con velocidadangular constante igual a la frecuencia angular del movimiento armónico simple querepresenta (representación de Fresnel). El fasor resultante de los dos dados, obtenidomediante la regla del paralelogramo, representará la amplitud y la fase inicial delm.a.s. resultante. Obviamente, como los dos fasores componentes tienen la mismafrecuencia angular (ω), ésta será también la del fasor resultante. Por tanto, será
[15.48]x A sen (ωt ψ )
La amplitud A puede calcularse por el teorema del coseno, obteniéndose denuevo la expresión [15.47a]. Podemos obtener el ángulo de fase inicial (ψ) proyectan-do los tres fasores sobre el eje horizontal (real) y vertical (imaginario). Tenemos denuevo las expresiones [15.46], que divididas miembro a miembro nos conducen denuevo a la expresión [15.47b].
Podemos considerar ahora algunos casos particulares interesantes.(1) Si es ψ1=ψ2, decimos que los dos m.a.s. componentes están en fase
(Figura 15.10a). Sus fasores son paralelos y se produce una superposición o interfe-rencia constructiva; la amplitud y la fase inicial del m.a.s. resultante son
]A A1 A2 ψ ψ1 ψ2
(2) Si es ψ1=ψ2 ± π, decimos que los dos m.a.s. componentes están en oposicióno contrafase (Figura 15.10b). Sus fasores son opuestos y se produce una superposicióno interferencia destructiva (parcial o total). Si es A1 > A2 será

§15.5.- Superposición de dos m.a.s. en una dimensión. 441
Figura 15.10
[15.50]A A1 A2 ψ ψ1
esto es, se produce una atenuación en la amplitud de las oscilaciones. En particular,si A1=A2, los dos movimientos se cancelan mutuamente.
(3) Si es ψ1=ψ2 ± π/2, decimos que los dos m.a.s. componentes están en cuadra-tura (Figura 15.10c). Los dos fasores son, en este caso, perpendiculares entre sí, y
tenemos [15.51]A 2 A 21 A 2
2 ψ ψ2 arctgA1
A2
§15.5.b. Frecuencias diferentes.- Consideraremos
Figura 15.11
ahora el caso más general, expresado por [15.41], enel que tenemos dos oscilaciones de amplitudesdiferentes (A1 y A2) y de frecuencias tambiéndiferentes (ω1 y ω2). En una representación fasorial,esta situación corresponde a la de sumar dos vecto-res rotantes que giran con diferente velocidadangular, como se muestra en la Figura 15.11 de modoque el ángulo que forman (o sea, la diferencia de

442 Lec. 15.- Superposición de movimientos armónicos simples.
fase entre ambas oscilaciones) va cambiando continuamente. En estas condiciones,es fácil comprender que carece de significado apreciable la especificación decualquier diferencia de fase inicial (entre los m.a.s. componentes) que sea distinta decero. Así pues, y sin perder generalidad en nuestras valoraciones, podemos escribir
[15.52]x1(t) A1sen ω1t x2(t) A2sen ω2t
El movimiento resultante de la superposición de estos dos m.a.s. ya no es unm.a.s., puesto que el fasor resultante ni tiene módulo constante ni rota uniforme-mente. En cuanto a la "amplitud" del movimiento resultante, se desprende fácilmentede la observación de la Figura 15.11 que
[15.53]A 2 A 21 A 2
2 2A1A2 cos (ω1 ω2)t
de modo que su valor está comprendido entre A1 + A2 (cuando [ω1-ω2]t=2nπ) yA1-A2 (cuando [ω1-ω2]t=(2n+1)π). Se dice que la amplitud está modulada. A
menos que exista una relación sencilla entre ω1 y ω2, el desplazamiento resultanteserá una función complicada del tiempo y quizás no llegue a repetirse nunca. Paraque exista una periodicidad en el movimiento resultante será necesario que losperiodos T1 y T2 sean conmensurables; es decir, que existan dos números naturales,n1 y n2, tales que
[15.54]T n1T1 n2T2
El periodo del movimiento resultante es, entonces, el valor de T obtenido utilizando
Figura 15.12
los valores enteros más pequeños de n1 y n2 que satisfagan dicha relación. Así, porejemplo, si T1=1s y T2=2.5s, entonces T1/T2 = 1/2.5 = 2/5 = n2/n1, y son n1=5 y n2=2,de modo que el periodo del movimiento resultante es T = 5 1 = 2 2.5 = 5 s. En laFigura 15.12a se ilustra el resultado de la combinación de dos m.a.s. de este tipo, conamplitudes A1=2 y A2=3, cuyos "ceros" coinciden en el instante inicial (t=0). En laFigura 15.12b mostramos la misma combinación cuando son los máximos de elongaciónlos que coinciden en el instante inicial (ψ1=ψ2=π/2, en [15.41]). Obsérvese como elaspecto del resultado puede depender marcadamente de la fase inicial de lasoscilaciones que se combinan.

§15.5.- Superposición de dos m.a.s. en una dimensión. 443
§15.5.c. Pulsaciones.- Llamamos pulsaciones o batimientos al resultado de lasuperposición de dos m.a.s. de frecuencias ligeramente diferentes.
Las pulsaciones constituyen un caso particular interesante de la superposición dedos m.a.s. de frecuencias diferentes. Analizaremos más fácilmente el fenómeno si loconsideramos como la superposición de dos m.a.s. de la misma amplitud; esto es
[15.55]x1(t) A sen ω1t x2(t) A sen ω2t
entonces, el movimiento resultante es3
[15.56]
x(t) x1(t) x2(t) A (senω1t senω2t)
2 A cos⎛⎜⎜⎝
⎞⎟⎟⎠
ω1 ω2
2t sen
⎛⎜⎜⎝
⎞⎟⎟⎠
ω1 ω2
2t
Evidentemente, esta suma, como resultado puramente matemático, puede hacerse para
Figura 15.13
cualesquiera que sean los valores de ω1 y ω2; pero su descripción como unapulsación o batimiento sólo tiene significado si
[15.57]ω1 ω2 ω1 ω2
pues entonces el fenómeno puede describirse como una oscilación armónica "simple"
[15.58]x(t) Aressen ωt
con[15.59]Ares 2A cos
⎛⎜⎜⎝
⎞⎟⎟⎠
ω1 ω2
2t ω
ω1 ω2
2
3 Conviene recordar que .senα senβ 2 sen α β2
cos α β2

444 Lec. 15.- Superposición de movimientos armónicos simples.
cuya frecuencia (ω) es igual al valor medio de las dos frecuencias que se combinan,pero cuya amplitud Ares no permanece constante, sino que varía periódicamente conel tiempo, con una frecuencia mucho menor ([ω1-ω2]/2), de modo que en cada ciclode esta variación están incluidos muchos ciclos (¿cuántos?) de la oscilación básica.En la Figura 15.13 se muestra el resultado de combinar dos oscilaciones armónicassimples, cuyas frecuencias respectivas son 40 Hz y 36 Hz. Puede observarse que laoscilación resultante, cuya frecuencia es (ν1+ν2)/2 = 38 Hz, tiene su amplitudmodulada con una frecuencia que es la diferencia, ν1-ν2 = 4 Hz, entre lasfrecuencias de las oscilaciones que se combinan, de modo que se anulará 4 veces porsegundo. Repárese en que la frecuencia de la pulsación es νp= ν1-ν2 y noν1-ν2 /2, como podría sugerir una primera impresión de la ecuación [15.56].
Es fácil producir pulsaciones acústicas haciendo vibrar dos diapasones idénticos, a uno de loscuales se le haya ajustado una pequeña mordaza en uno de sus brazos a fin de alterar ligeramentela frecuencia natural de sus vibraciones. En este caso, la pulsación se manifiesta comoreforzamientos y debilitamientos periódicos en la intensidad del sonido que percibimos. Se hace usodel fenómeno de las pulsaciones en el proceso de "afinado" de un instrumento musical de cuerdasdobles, como un piano, un laúd, ...; las pulsaciones desaparecen cuando las dos cuerdas dan lamisma nota.
§15.6. Superposición de dos m.a.s. en direcciones perpendiculares.-Vamos a estudiar ahora un problema esencialmente diferente al considerado en losartículos anteriores. Nos vamos a interesar por el resultado de combinar dos m.a.s.,que tienen lugar en direcciones perpendiculares entre sí, de modo que el movimientoreal resultante es un verdadero movimiento bidimensional. Este problema tiene uninterés físico considerable, y su estudio en el contexto de esta lección es adecuadoporque se sirve de las mismas técnicas que hemos utilizado anteriormente para lacombinación de dos m.a.s. en la misma dirección. Las consideraciones que haremospueden generalizarse fácilmente para la superposición de tres m.a.s. en direccionesperpendiculares entre sí; entonces, el movimiento real será tridimensional. Este seráel caso, por ejemplo, de las vibraciones de un átomo ligado elásticamente dentro dela estructura esencialmente tridimensional de una red cristalina.
Limitándonos a la situación bidimensional, podemos considerar tres casos deinterés.
§15.6.a. Frecuencias iguales.- Consideremos una partícula de masa m que se
Figura 15.14
encuentre inicialmente en reposo en una posición P(x0,y0) (Figura 15.14), en un campode fuerzas centrales cuya ley de la fuerza es
[15.60]F kr
donde k es una constante esencialmente positiva (cons-tante elástica). En estas condiciones es fácil comprenderque el movimiento de la partícula será un m.a.s. a lolargo de la recta que une el punto P con el origen O(centro de fuerzas); la frecuencia de las oscilaciones
será ω k/mConsideremos ahora el caso más general en el que
la partícula posea una velocidad inicial (v0) que no tenga

§15.6.- Superposición de dos m.a.s. en direcciones perpendiculares. 445
la misma dirección que la fuerza F (Figura 15.15). En estas
Figura 15.15
condiciones es evidente que la trayectoria de la partículano será rectilínea. Puesto que la fuerza es central, elmovimiento de la partícula deberá estar contenido en elplano definido por los vectores v0 y F, y se cumplirá laley de las áreas. Tomaremos el centro de fuerzas Ocomo origen de un sistema de coordenadas cartesianas(xy), cuyos ejes estén contenidos en el plano en el quetiene lugar el movimiento. Entonces, podemos escribir
[15.61]F kr kx i ky j
de modo que la segunda ley de Newton nos permiteponer
[15.62]kx mx ky my
y las proyecciones de la ec. diferencial del movimiento de la partícula sobre los ejescoordenados son
[15.63]x ω2x 0 y ω2y 0
donde hemos puesto ω2=k/m, como en los artículos anteriores. Las soluciones de estasec. dif. son
[15.64]x A sen(ωt α) y B sen(ωt β)
respectivamente, donde A, B, α y β son cuatro constantes que deberán evaluarse apartir de las condiciones iniciales (x0, y0, x0, y0). Las funciones [15.64] constituyen lasecuaciones paramétricas de la trayectoria y representan dos m.a.s. en direccionesperpendiculares, de la misma frecuencia, pero, en general, con diferentes amplitudesy fases iniciales.
Obtendremos la ecuación algebraica de la trayectoria eliminando el tiempo tentre las dos ecuaciones paramétricas [15.64] del movimiento de la partícula. Poniendoδ=α-β, tenemos
[15.65]x A sen(ωt β δ) A sen(ωt β) cosδ A cos(ωt β) senδ
entonces, teniendo en cuenta que
[15.66]yB
sen(ωt β) ⇒ cos(ωt β) 1 y 2
B 2
expresiones que sustituiremos en [15.65] para obtener
[15.67]xA
yB
cosδ 1 y 2
B 2senδ
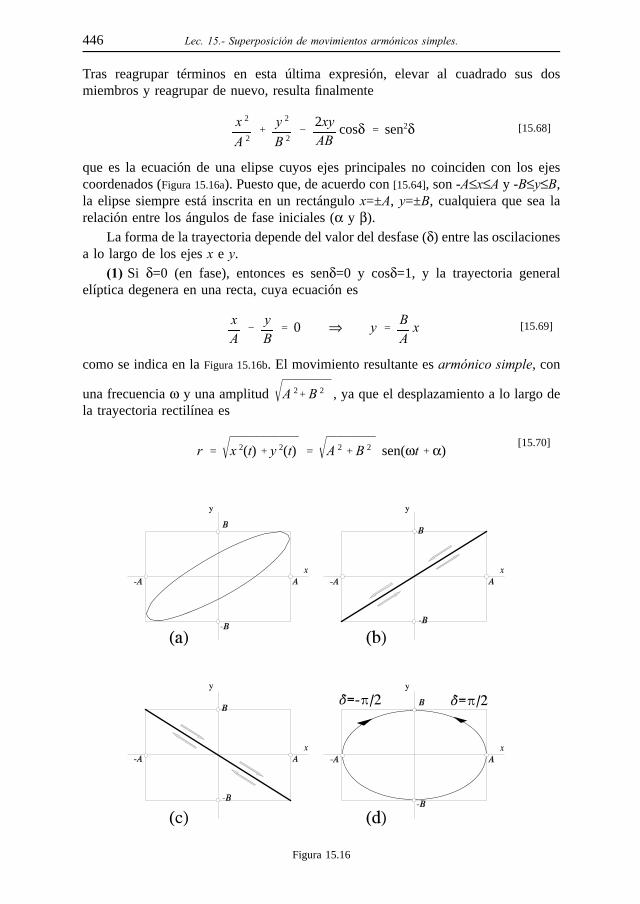
446 Lec. 15.- Superposición de movimientos armónicos simples.
Tras reagrupar términos en esta última expresión, elevar al cuadrado sus dosmiembros y reagrupar de nuevo, resulta finalmente
[15.68]x 2
A 2
y 2
B 2
2xyAB
cosδ sen2δ
que es la ecuación de una elipse cuyos ejes principales no coinciden con los ejes
Figura 15.16
coordenados (Figura 15.16a). Puesto que, de acuerdo con [15.64], son -A≤x≤A y -B≤y≤B,la elipse siempre está inscrita en un rectángulo x=±A, y=±B, cualquiera que sea larelación entre los ángulos de fase iniciales (α y β).
La forma de la trayectoria depende del valor del desfase (δ) entre las oscilacionesa lo largo de los ejes x e y.
(1) Si δ=0 (en fase), entonces es senδ=0 y cosδ=1, y la trayectoria generalelíptica degenera en una recta, cuya ecuación es
[15.69]xA
yB
0 ⇒ y BAx
como se indica en la Figura 15.16b. El movimiento resultante es armónico simple, con
una frecuencia ω y una amplitud , ya que el desplazamiento a lo largo deA 2 B 2
la trayectoria rectilínea es
[15.70]r x 2(t) y 2(t) A 2 B 2 sen(ωt α)
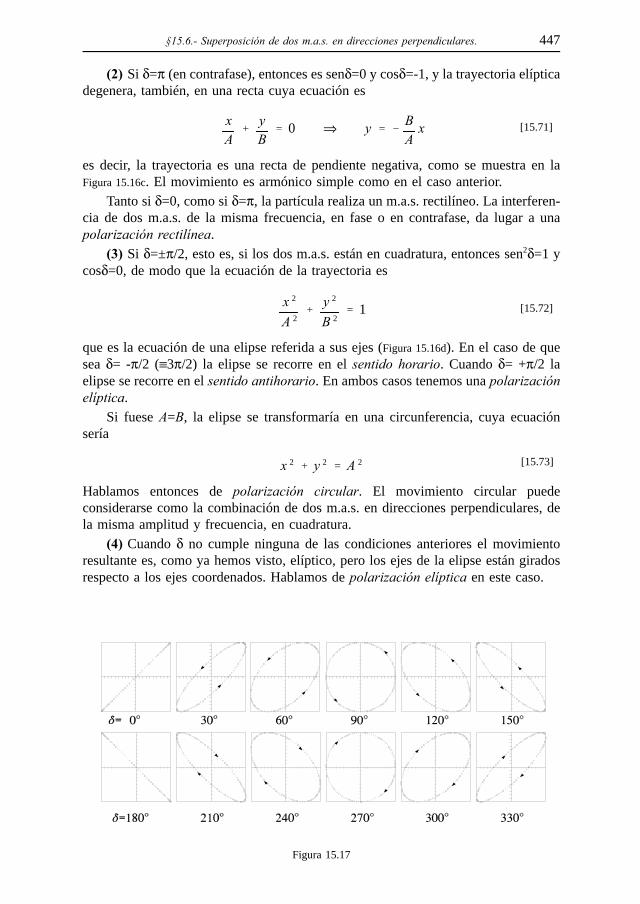
§15.6.- Superposición de dos m.a.s. en direcciones perpendiculares. 447
(2) Si δ=π (en contrafase), entonces es senδ=0 y cosδ=-1, y la trayectoria elípticadegenera, también, en una recta cuya ecuación es
[15.71]xA
yB
0 ⇒ y BAx
es decir, la trayectoria es una recta de pendiente negativa, como se muestra en laFigura 15.16c. El movimiento es armónico simple como en el caso anterior.
Tanto si δ=0, como si δ=π, la partícula realiza un m.a.s. rectilíneo. La interferen-cia de dos m.a.s. de la misma frecuencia, en fase o en contrafase, da lugar a unapolarización rectilínea.
(3) Si δ=±π/2, esto es, si los dos m.a.s. están en cuadratura, entonces sen2δ=1 ycosδ=0, de modo que la ecuación de la trayectoria es
[15.72]x 2
A 2
y 2
B 21
que es la ecuación de una elipse referida a sus ejes (Figura 15.16d). En el caso de quesea δ= -π/2 (≡3π/2) la elipse se recorre en el sentido horario. Cuando δ= +π/2 laelipse se recorre en el sentido antihorario. En ambos casos tenemos una polarizaciónelíptica.
Si fuese A=B, la elipse se transformaría en una circunferencia, cuya ecuaciónsería
[15.73]x 2 y 2 A 2
Hablamos entonces de polarización circular. El movimiento circular puedeconsiderarse como la combinación de dos m.a.s. en direcciones perpendiculares, dela misma amplitud y frecuencia, en cuadratura.
(4) Cuando δ no cumple ninguna de las condiciones anteriores el movimiento
Figura 15.17
resultante es, como ya hemos visto, elíptico, pero los ejes de la elipse están giradosrespecto a los ejes coordenados. Hablamos de polarización elíptica en este caso.
448 Lec. 15.- Superposición de movimientos armónicos simples.
Puesto que la fuerza F es central, la partícula cumple con la ley de las áreas alrecorrer su trayectoria. Esto es, su velocidad areolar deberá ser constante
[15.74]⎡⎢⎣
⎤⎥⎦
dSdt
12r ×v C
Al ser r= xi + yj y v = xi + yj, tenemos
[15.75]12r × v 1
2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
x
y
0
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
x
y
0
12
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
xy yx
y puesto que [15.76]x ωA cos(ωt α) y ωB cos(ωt β)
resulta
C ⎡⎢⎣
⎤⎥⎦
dSdt
12
ωAB [ sen(ωt α)cos(ωt β) cos(ωt α)sen(ωt β) ]
[15.77]12
ωAB sen(α β) 12
ωAB senδ
de modo que la velocidad areolar es proporcional al seno del ángulo de desfase(δ=α-β) entre las dos oscilaciones que se combinan. La velocidad areolar serámáxima en la cuadratura (para δ=±π/2, es C = ±ωAB/2) y nula cuando δ=0 o δ=±π,pues entonces la trayectoria es rectilínea.
La expresión [15.77] nos permite determinar el sentido (horario o antihorario) enque se recorre la trayectoria, pues dicho sentido viene dado por el signo de lavelocidad areolar, la cual será positiva (sentido antihorario) si O < δ < π, y seránegativa (sentido horario) si π < δ < 2π . En la Figura 15.17 presentamos, a modo deresumen, el aspecto de la trayectoria para diversos ángulos de desfase.
§15.6.b. Frecuencias ligeramente diferentes.- Consideremos ahora la combinaciónde dos m.a.s. perpendiculares cuyas frecuencias respectivas, ωx y ωy son tales que
[15.78]ωx ω ωy ω
siendo tal que [15.79]ωx ωy
ω ω1
Las ecuaciones de los m.a.s. que se combinan son
[15.80]x A sen(ωxt α) y B sen(ωyt β)
y pueden escribirse en la forma
[15.81]x A sen(ωt t α) y B sen(ωt β)

§15.6.- Superposición de dos m.a.s. en direcciones perpendiculares. 449
de modo que llamando y operando como en la sección
Figura 15.18
δ′ t α β t δanterior queda finalmente
[15.82]x 2
A 2
y 2
B 2
2xyAB
cosδ′ sen2δ′
que es como la ec. [15.68], salvo que la diferencia defase δ′ entre los dos m.a.s. perpendiculares es ahorafunción del tiempo. Conforme transcurre el tiempo elángulo δ′ irá aumentando en forma continua, de modoque la partícula móvil irá pasando de una trayectoriaelíptica (eventualmente circular o rectilínea) a otra, sinllegar a cerrarse dichas trayectorias. En la Figura 15.18
mostramos la trayectoria resultante para /ω=0.20; alcabo de un cierto número de "ciclos" la trayectoria secierra y se repite, como el lector comprobará fácil-mente siguiendo las direcciones indicadas en la figura.Si es muy pequeño, el paso de una trayectoria elíptica a otra será muy lento ypodremos ver (en la pantalla de un osciloscopio, por ejemplo) como la trayectoria dela partícula va tomando todas las formas representadas en la Figura 15.17. Si no essuficientemente pequeño, el paso de una trayectoria a otra se hace bruscamente y nopueden distinguirse las elipses sucesivas correspondientes a los valores crecientes deldesfase entre ambos m.a.s..
§15.6.c. Frecuencias diferentes. Figuras de Lissajous.- En el caso general deoscilaciones en dos dimensiones, las frecuencias de los m.a.s. en las direcciones delos ejes x e y serán diferentes, de modo que las ecuaciones de sendos m.a.s. son
[15.83]x A sen(ωxt α) y B sen(ωyt β)
que son las ecuaciones paramétricas de la trayectoria seguida por la partícula. Latrayectoria no será una elipse (salvo que ωx = ωy), sino que, en el caso general, esuna curva de bello aspecto que recibe el nombre de figura o curva de Lissajous, enhonor de J.A. LISSAJOUS (1822-1880), que hizo un amplio estudio de estos tipos demovimiento. Tales curvas serán cerradas si el movimiento se repite a intervalosregulares de tiempo. Esto sólo será posible si las frecuencias ωx y ωy son conmensu-rables; es decir, si su cociente (ωx/ωy) es racional. Entonces existirán dos númerosnaturales, nx y ny, tales que
[15.84]ωx
ωy
nxny
TyTx
y, obviamente, el periodo del movimiento resultante es el valor de T
[15.85]T nxTx nyTy
obtenido utilizando los valores más pequeños que satisfagan la relación [15.84]
(fracción irreducible).

450 Lec. 15.- Superposición de movimientos armónicos simples.
En efecto, escribiendo las ecuaciones paramétricas de la trayectoria en función de los periodosTx y Ty,
[15.86]x A sen(2π tTx
α) y B sen(2π tTy
β)
se ve que en el instante t=0 la posición de la partícula es
[15.87]x(0) A senα y(0) B senβ
y que al cabo de un tiempo T = nxTx = nyTy la partícula se encuentra en la posición
[15.88]x(T) A sen(2πnx α) A senα y(T) A sen(2πny β) B senβ
de modo que la partícula ha regresado a su posición inicial. Dejamos al cuidado del lectorcomprobar que también se repite la velocidad del partícula; i.e., x(0)=x(T) y y(0)=y(T).
En el caso de que el cociente de frecuencias (o de periodos) no sea una fracciónracional, la trayectoria será abierta y la partícula "nunca" pasará dos veces por unmismo punto del plano con la misma velocidad. Se puede demostrar que, en tal caso,la partícula "llenará" todo el rectángulo [x=±A, y=±B] una vez haya transcurrido untiempo "suficientemente largo".
Es interesante que destaquemos que el oscilador bidimensional es un ejemplo desistema en el que un cambio infinitesimal en los parámetros del movimiento produceuna modificación cualitativa del tipo de movimiento. Así, en tanto que la trayectoriaes cerrada para dos frecuencias conmensurables, un cambio infinitesimal que desvíeel cociente ωx/ωy de ser una fracción racional transformará la trayectoria de cerradaen abierta.
La representación fasorial del m.a.s. nos permite dibujar fácilmente las curvas de
Figura 15.19
Lissajous cuando existe una relación sencilla entre las frecuencias ωx y ωy, de modoque los números nx y ny sean pequeños. En la Figura 15.19 ilustramos los casos ωx/ωy
= 1/2 con δ=α-β=0 y ωx/ωy = 2/3 con δ=60°. El aspecto de las curvas de Lissajouspara una relación de frecuencias dadas, depende fuertemente no sólo de la diferenciade fase δ, sino también de los valores de α y de β.

§15.6.- Superposición de dos m.a.s. en direcciones perpendiculares. 451
Figura 15.20

452 Lec. 15.- Superposición de movimientos armónicos simples.
Es fácil averiguar la relación de frecuencias existentes entre los dos m.a.s. quehan originado una determinada curva de Lissajous. Bastará contar el número de inter-secciones de una recta vertical con las ramas de la curva de Lissajous (sea nx elresultado) y hacer lo mismo con una recta horizontal (sea ny el resultado). La relaciónentre ambos números (nx/ny) coincide con la relación entre las frecuencias (ωx/ωy). Unprocedimiento alternativo, más cómodo cuando la curva tiene muchas ramas, consisteen hallar la relación entre el número de puntos de tangencia que tiene la curva condos lados adyacentes del rectángulo en la que está inscrita. El lector deberá buscarla justificación teórica de estos resultados y comprobar su exactitud en las diversascurvas de Lissajous de la Figura 15.20.
Resulta muy fácil y sugestivo4 obtener las curvas de Lissajous aplicandotensiones sinusoidales a las placas de deflexión horizontal y vertical de un oscilosco-pio de rayos catódicos (CRT - Catode Ray Tube).
Problemas
15.1.- Sobre un oscilador amortiguado, carac-terizado por una frecuencia natural ω0 y unparámetro de amortiguamiento β=ω0/3, actúauna fuerza impulsora cuya expresión en fun-ción del tiempo es
F = c1senω0t + c3sen3ω0t
a) Expresar en función del tiempo la elonga-ción del oscilador correspondiente al estadoestacionario. b) ¿Qué valor deberá tener elcociente c3/c1 para que la oscilación forzada defrecuencia 3ω0 tenga la misma amplitud que lade frecuencia ω0?
15.2.- Sean ω0 y β=ω0/4 la frecuencia naturaly el parámetro de amortiguamiento de unoscilador de masa m. Consideremos una fuerzaimpulsora
F(t) a1sen 1
2ω0t a2sen2ω0t
actuando sobre el oscilador. a) Encontrar larespuesta en elongación correspondiente alestado estacionario. b) ¿Qué valor deberá tenerel cociente a2/a1 para que la oscilación forzada
correspondiente a la frecuencia 2ω0 tenga lamisma amplitud que la correspondiente a lafrecuencia ω0/2? Compárese el resultado quese obtuvo en el problema anterior y expliquela diferencia. c) En el supuesto del apartadoanterior, ¿cuál es el valor del cociente<P2>/<P1> entre las potencias transferidas porla fuerza impulsora a cada una de lascomponentes? d) ¿Qué valor deberá tener elcociente a2/a1 para que las potencias absorbi-das por cada componente sean iguales?¿Cuánto valdrá entonces el cociente de ampli-tudes A2/A1?
15.3.- Onda cuadrada.- a) Obtener el desarro-llo en serie de Fourier de la función
F(t)
⎧⎪⎪⎨⎪⎪⎩
h T2
< t < 0
h 0 < t < T2
b) Supongamos que una fuerza periódica deltipo anterior actuase sobre un oscilador cuyo
4 Prácticas de Laboratorio de Física General, del mismo autor.Práctica nº 38.- El Osciloscopio.

Problemas 453
factor de calidad sea Q=10. Determinar losespectros de amplitudes de los armónicoscorrespondientes a la fuerza impulsora y a larespuesta en elongación para: i) ω0 = 4ω yii) ω0 = 5ω.
15.4.- Rectificación de media onda.- a) Obte-ner el desarrollo en serie de Fourier de lafunción:
F(t)
⎧⎪⎪⎨⎪⎪⎩
senωt 0 < t < πω
0 πω
< t < 2πω
b) Determinar los espectros de amplitudes delos armónicos correspondientes a la fuerzaimpulsora F(t) y a la respuesta en elongacióna dicha fuerza de un oscilador cuya frecuencianatural sea ω0=4ω y Q=5.
15.5.- Rectificación de onda completa.-a) Obtener el desarrollo de Fourier de la fun-ción
F(t) A senωt 0 < t < πω
b) Determinar los espectros de amplitudescorrespondientes a la fuerza impulsora F(t) ya la respuesta en elongación a dicha fuerza deun oscilador cuyo factor de calidad es Q = 10y cuya frecuencia natural es: i) ω0 = ω y ii) ω0
= 6ω.
15.6.- Calcular la amplitud y constante de fasedel desplazamiento resultante de la superposi-ción de los m.a.s. x1 y x2, que se dan a conti-nuación y dibujar los diagramas fasorialescorrespondientes:
a) x1= 3 sen(ωt+30°) x2= 4 sen(ωt+45°)
b) x1= 3 sen(ωt+45°) x2= 4 sen(ωt+135°)
c) x1= 2 sen(ωt+60°) x2= 5 cos(ωt-30°)
15.7.- Una partícula está sometida simultánea-mente a tres m.a.s. de la misma frecuencia ydirección, cuyas amplitudes son 3, 4 y 5respectivamente. El segundo m.a.s. estáadelantado un ángulo de fase de 30° respectoal primero, y el tercero lo está 90° respecto alsegundo. Hallar la amplitud del desplazamientoresultante y su fase relativa al primer m.a.s.
15.8.- Calcular la frecuencia y el periodo delmovimiento combinado en cada una de lasoscilaciones siguientes
a) 3 sen(7πt+π/6) - 2 cos(5πt-π/3)
b) 4 sen(4πt-π/4) + 3 sen(3πt+π/6)
c) 3 sen(πt-π/3) + 2 cos(√2t+π/4)
d) 2 sen(50πt) - 2 sen(48πt+π/6)
15.9.- Consideramos la superposición de dososcilaciones armónicas sobre una misma rectacuyas elongaciones vienen dadas por
x1 = A sen 16πt x2 = A cos 12πt
respectivamente. a) Hallar el periodo y la fre-cuencia del batimiento. b) ¿Cuántos ciclos dela oscilación básica están contenidos en cadamódulo del batimiento? c) Dibujar un esquemacuidadoso de la perturbación resultante durantedos periodos del batimiento.
15.10.- Una partícula de 4 unidades de masa semueve en el plano xy bajo la acción de unafuerza conservativa tal que la energía potencialde la partícula es Ep = 2(9x2 + 25y2). En elinstante inicial (t=0) el vector de posición y lavelocidad de la partícula son r0 = 4i + 2j y v0
= 6i + 5j, respectivamente. a) Determinar laposición y la velocidad de la partícula enfunción del tiempo. b) Demostrar que latrayectoria de la partícula está confinada en elinterior de un rectángulo y calcular las dimen-siones de éste. c) ¿Es periódico el movimientode la partícula? En caso afirmativo, calcular elperiodo del movimiento. d) Hacer un esbozode la trayectoria.
15.11.- Repetir el Problema 15.10 para unaenergía potencial dada por Ep = 2(8x2 + 25y2).
15.12.- Medida de desfases I.- Cuando se
Prob. 15.12
aplican dos tensiones alternas, de la mismafrecuencia, pero en general de distintas ampli-tudes y fase inicial, a las placas de deflexiónvertical y horizontal, respectivamente, de unosciloscopio, sobre la pantalla de éste aparece-rá una figura que podrá ser una recta, unacircunferencia o una elipse. El valor del ángulode desfase δ entre ambas tensiones puededeterminarse midiendo sobre la pantalla del

454 Lec. 15.- Superposición de movimientos armónicos simples.
osciloscopio las distancias a y b definidas enla figura adjunta. Demostrar que, entonces,podemos calcular el ángulo de desfase como
δ arcsen ab
15.13.- Medida de desfases II.- Existe un se-
Prob. 15.13
gundo método (aunque no se presta tan biencomo el descrito en el Problema 15.12 a lasmedidas directas) para la medida de ángulos
de desfase entre corrientes alternas de la mis-ma frecuencia sobre la pantalla de un oscilos-copio. Consiste en medir las longitudes D y dde los ejes mayor y menor de la elipse; en-tonces
δ 2 arctg dD
Demostrar esta expresión.
15.14.- El movimiento de una partícula en elplano xy está descrito en función del tiempopor las ecuaciones:
x = A cos ωt y = B cos 2ωt
Demostrar que la trayectoria de la partículaconsiste en un arco de parábola.
15.15.- Dibujar las figuras de Lissajous corres-pondientes a la combinación de las siguientesoscilaciones en direcciones perpendicularesentre sí:
a) x= 3 sen4ωt y= 2 sen(4ωt+30°)
b) x= 3 sen 2t y= 2 sen (3t+30°)
c) x= sen 3πt y= cos(4πt+45°)
d) x= cos 5πt y= cos 3πt
e) x= 2 cos 2t y= 5 cos πt
15.16.- Consideremos la superposición de tresm.a.s. rectilíneos, que tienen lugar en tresdirecciones mutuamente perpendiculares (quetomaremos como ejes x, y, z) y que compartenun mismo origen (oscilador armónico tridi-mensional). Sean ωx, ωy, ωz, las frecuenciasangulares respectivas. a) ¿En qué relacióndeberán encontrarse las frecuencias ωx:ωy:ωzpara que el movimiento resultante sea periódi-co? b) Entonces, ¿cuánto valdrá el periodo delmovimiento?.

Capítulo V.
Dinámica de los
sistemas de partículas.
16.- Geometría de masas. 457
17.- Sistemas de partículas.
Leyes de conservación. 489
18.- Sistemas de masa variable.
El problema de 2-cuerpos. 519
19.- Colisiones. 541
Manuel R. Ortega Girón 455

456 Lecciones de Física

16.- Geometría de masas.
§16.1. Distribuciones discretas y continuas de materia (457); §16.2. Centro de masa (458);§16.3. Teoremas concernientes al centro de masa (461); §16.4. Momentos de inercia (470);§16.5. Radio de giro (472); §16.6. Productos de inercia (472); §16.7. Matriz de inercia(473); §16.8. Teoremas concernientes a los momentos y productos de inercia (474);§16.9. Teoremas de Steiner (477); §16.10. Momento de inercia respecto a un eje cualquiera(479); Problemas (484)
En las lecciones que siguen, que estarán dedicadas a la Dinámica de los Sistemas de Partículasy del Sólido Rígido, veremos la conveniencia de definir los conceptos de centro de masa y demomento de inercia. Comprenderemos la importancia y significado de tales conceptos cuandoaparezcan de una forma natural al desarrollar la Dinámica de los Sistemas de Partículas. En estalección tan solo nos ocuparemos de los aspectos formales y técnicas matemáticas asociadas con ladefinición "geométrica" de tales conceptos.
§16.1. Distribuciones discretas y continuas de materia.- Una distribucióndiscreta de materia es aquélla en la que las partículas están netamente diferenciadaspor la existencia de espacios vacíos entre ellas. Una distribución discreta de materiaquedará definida mediante las coordenadas de posición de todas y cada una de laspartículas que la integran, como se ilustra en la Figura 16.1. Desde un punto de vistamicroscópico esa es la situación real, puesto que la materia presenta una estructuraesencialmente discreta.
Sin embargo, desde un punto de vista macroscópico, podemos y debemosconsiderar el caso de una distribución continua de materia, i.e., una distribución demateria sin espacios vacíos o soluciones de continuidad. En este caso, veremos queen muchas ocasiones será necesario descomponer el sistema material en un númeroinfinito de porciones elementales (infinitesimales), de masa dm, como se ilustra enla Figura 16.4.
Para caracterizar una distribución continua de materia, definimos la densidadvolúmica ρ, la densidad superficial σ y la densidad lineal λ, correspondientes a unadistribución cúbica, superficial y lineal de materia, respectivamente, por
[16.1]ρ dmdV
σ dmdS
λ dmds
Manuel R. Ortega Girón 457

458 Lec. 16.- Geometría de masas.
donde dV, dS y ds representan, respectivamente, los elementos de volumen, desuperficie y de longitud, correspondientes al elemento de masa dm. En general, ladensidad del sistema material (ρ, σ o λ) variará de una zona a otra del sistemamaterial; esto es, la densidad será una función de punto ρ(x,y,z), σ(x,y,z) o λ(x,y,z),y deberemos conocer dicha función para que el sistema material quede bien definido.
Aun cuando sea razonable la aproximación de un sistema material mediante una distribucióncontinua de materia, nos encontramos con una complicación de tipo conceptual cuando tratamosde utilizar el proceso matemático de paso al límite, propio del Cálculo Diferencial e Integral. Enefecto, al disminuir gradualmente el tamaño del elemento material, reencontramos la estructuradiscreta de la materia. Evitaremos este inconveniente entendiendo por elemento infinitesimal demateria una cantidad muy pequeña de ésta, pero suficientemente grande, en comparación con lasdistancias intermoleculares, como para no tener que considerar la estructura discreta de la materia.Estos elementos se llaman macroscópicos, pero serán considerados como infinitesimales en elsentido matemático, a fin de poder utilizar los recursos del Cálculo Diferencial e Integral.
§16.2. Centro de masa.- Consideremos un sistema de partículas, compuesto
Figura 16.1
por N de ellas, cuyas masas designaremos por mi (i = 1, 2, ... N) y sea ri el vector deposición de la partícula i-ésima respecto alorigen O de un referencial dado. Definimosel centro de masa1 de un tal sistema departículas como el punto del espacio, quedesignamos por CM (o por G, cuando asíconvenga), cuyo vector de posiciónrespecto a O es
[16.2]r cm
N
i 1mi r i
N
i 1mi
donde M = mi representa, evidentemente,la masa total del sistema de partículas.
TEOREMA I.- La posición del centro de masa de un sistema es independientedel referencial que utilicemos y depende solamente de las masas de laspartículas y de las posiciones de unas respecto a otras.
En efecto, de acuerdo con el carácter vectorial de la definición [16.2] del centro de masa, ypuesto que no hemos hecho referencia alguna a ningún conjunto particular de ejes, la posición delcentro de masa no dependerá de la orientación del sistema de ejes, con origen en O, que elijamos.Pero, además, debemos demostrar que la posición del centro de masa no depende tampoco de laelección del origen. Para demostrar esto último, consideraremos dos puntos O y O′, orígenes de dosreferenciales (Figura 16.2), y sean ri y ri′ los vectores de posición de una partícula genérica, mi,respecto a cada uno de esos orígenes. La relación existente entre los vectores ri y ri′ es
1 El centro de gravedad de un cuerpo se define como el punto de aplicación de la resultantede las fuerzas gravitatorias que actúan sobre él. Así pues, el centro de masa y el centro degravedad son conceptualmente diferentes y no debemos confundirlos. Sin embargo, las posicionesde ambos centros suelen coincidir en la mayor parte de las situaciones prácticas. Insistiremos eneste asunto en §20.5.

§16.2.- Centro de masa. 459
Figura 16.2
[16.3]r i r i′ OO′
Los centros de masa CM y CM′ estarándefinidos por los vectores de posición rcm yr′cm relativos a O y O′, con
[16.4]rcm′
N
i 1mi r i′
N
i 1mi
Sustituyendo la expresión [16.3] en la[16.2] tenemos
[16.5]rcm1M
N
i 1mi (r i′ OO′) 1
M
N
i 1mi r i′
1M
(N
i 1mi) OO′ rcm′ OO′
de modo que rcm y r′cm determinan un mismo punto (CM ≡ CM′) respecto a O y O′, por lo que elcentro de masa es único.
En coordenadas cartesianas, que son las utilizadas más comúnmente, la posicióndel centro de masa del sistema de partículas viene dada por
[16.6]xcm
N
i 1mi xi
i 1mi
ycm
N
i 1mi yi
i 1mi
zcm
N
i 1mi zi
i 1mi
Ejemplo I.- El ejemplo más simple corresponde al de dos partículas, de masas m1 y m2,
Figura 16.3
respectivamente. Tomaremos como eje x la rectadefinida por las dos partículas. En estas condiciones, alser y1 = y2 = 0 y z1 = z2 = 0, serán ycm = 0 y zcm = 0, demodo que el centro de masa estará situado sobre el ejex, siendo su posición
xcm
m1 x1 m2 x2
m1 m2
Las distancias d1 y d2, de cada una de las partículas alcentro de masa CM, son
[16.7]d1 x1 xcm
m2
m1 m2
(x2 x1) d2 x2 xcm
m1
m1 m2
(x2 x1)
de modo que [16.8]d1
d2
m2
m1
y el centro de masa está situado entre ambas partículas, siendo la distancia a cada una de ellasinversamente proporcional a sus masas.
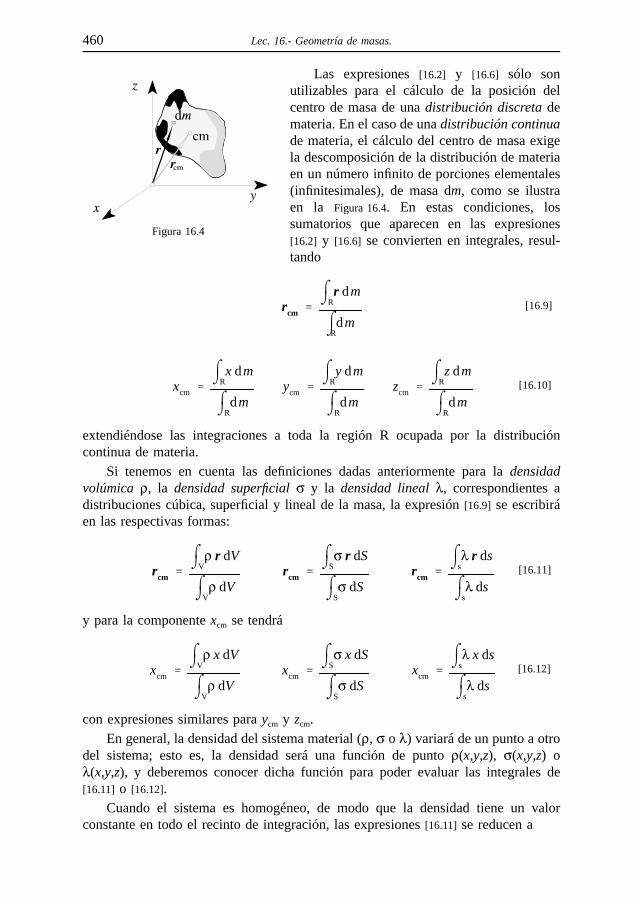
460 Lec. 16.- Geometría de masas.
Las expresiones [16.2] y [16.6] sólo son
Figura 16.4
utilizables para el cálculo de la posición delcentro de masa de una distribución discreta demateria. En el caso de una distribución continuade materia, el cálculo del centro de masa exigela descomposición de la distribución de materiaen un número infinito de porciones elementales(infinitesimales), de masa dm, como se ilustraen la Figura 16.4. En estas condiciones, lossumatorios que aparecen en las expresiones[16.2] y [16.6] se convierten en integrales, resul-tando
[16.9]rcm⌡⌠
Rr dm
⌡⌠Rdm
[16.10]xcm
⌡⌠
Rx dm
⌡⌠
Rdm
ycm
⌡⌠
Ry dm
⌡⌠
Rdm
zcm
⌡⌠
Rz dm
⌡⌠
Rdm
extendiéndose las integraciones a toda la región R ocupada por la distribucióncontinua de materia.
Si tenemos en cuenta las definiciones dadas anteriormente para la densidadvolúmica ρ, la densidad superficial σ y la densidad lineal λ, correspondientes adistribuciones cúbica, superficial y lineal de la masa, la expresión [16.9] se escribiráen las respectivas formas:
[16.11]rcm⌡⌠
Vρ r dV
⌡⌠
Vρ dV
rcm⌡⌠
Sσ r dS
⌡⌠
Sσ dS
rcm⌡⌠
sλ r ds
⌡⌠
sλ ds
y para la componente xcm se tendrá
[16.12]xcm
⌡⌠
Vρ x dV
⌡⌠
Vρ dV
xcm
⌡⌠
Sσ x dS
⌡⌠
Sσ dS
xcm
⌡⌠
sλ x ds
⌡⌠
sλ ds
con expresiones similares para ycm y zcm.En general, la densidad del sistema material (ρ, σ o λ) variará de un punto a otro
del sistema; esto es, la densidad será una función de punto ρ(x,y,z), σ(x,y,z) oλ(x,y,z), y deberemos conocer dicha función para poder evaluar las integrales de[16.11] o [16.12].
Cuando el sistema es homogéneo, de modo que la densidad tiene un valorconstante en todo el recinto de integración, las expresiones [16.11] se reducen a
§16.2.- Centro de masa. 461
[16.13]rcm⌡⌠
Vr dV
Vrcm
⌡⌠
Sr dS
Srcm
⌡⌠
sr ds
s
donde V, S y s representan el volumen, la superficie y la longitud, respectivamente,del recinto de integración, o sea, de la región del espacio ocupada por el sistemamaterial. En estas condiciones (cuerpos homogéneos), la posición del centro de masadepende tan sólo de la forma geométrica del cuerpo, y el centro de masa recibe elnombre de centroide.
§16.3. Teoremas concernientes al centro de masa.- El estudio de lastécnicas matemáticas necesarias para el cálculo del centro de masa de unadistribución continua de materia encuentra su lugar adecuado en un curso de CálculoDiferencial e Integral, y tales problemas constituyen excelentes ejercicios de esarama del Cálculo. En general, la evaluación de una integral de algunos de los tiposde [16.11] nos conducirá a una integración de línea, doble o triple, según que la masaesté distribuida sobre una línea, sobre una superficie o en un volumen. En ocasiones,será suficiente la elección de coordenadas cartesianas (x,y,z) para valorar dichasintegrales. Sin embargo, en muchos casos se conseguirá una notable simplificacióndel problema mediante la adopción de un sistema de coordenadas curvilíneas(coordenadas polares, cilíndricas, ...) adaptadas lo mejor posible a la geometría delcuerpo cuyo centro de masa queremos determinar. No es nuestro propósito hacer unadigresión sobre el significado y las técnicas de evaluación de integrales dobles ytriples, ni sobre los distintos sistemas de coordenadas curvilíneas; el alumno deberáconsultar una obra de Cálculo Diferencial e Integral. En la página 462 se resumenlas propiedades más importantes, en lo que aquí nos interesa, de los sistemas decoordenadas cartesianas, cilíndricas, polares esféricas y polares planas, y al final deeste artículo resolveremos algunos problemas que ilustrarán el uso de las técnicas decálculo asociadas con la determinación del centroide de algunas formas geométricasnotables.
Aparte de las técnicas matemáticas generales, a las que acabamos de hacerreferencia, existen varios teoremas que facilitan, en ocasiones, la localización delcentro de masa de una distribución discreta o continua de materia, a partir de lasecuaciones [16.6] o [16.10]. Entre estos teoremas figura, evidentemente, el yademostrado al comienzo de este artículo, que nos permite elegir libremente los ejescoordenados y el origen. Estos teoremas se demuestran tanto para una distribucióndiscreta de materia como para una distribución continua caracterizada por unadensidad (volúmica, superficial o lineal) que es una función de las coordenadas (x,y,z,por ejemplo) de cada elemento de masa de la distribución. Cualquiera que sea elpunto de vista que adoptemos para demostrarlos, siempre podremos hacer unademostración paralela, con simples cambios en la notación, desde el otro punto devista. En lo que sigue, adoptaremos el punto de vista de una distribución discreta demateria para la demostración de los teoremas.
TEOREMA II.- El momento estático de un sistema de partículas respecto acualquier plano que pasa por su centro de masa es nulo.

462 Lec. 16.- Geometría de masas.
COORDENADAS CARTESIANAS (x,y,z)
Figura 16.5
elemento de volumen:
dV = dx dy dzelementos de superficie:
dSx = dy dzdSy = dx dzdSz = dx dy
elemento de longitud:
ds = dx i + dy j + dz kds2 = dx2 + dy2 + dz2
COORDENADAS CILÍNDRICAS (r, θ, z)
Figura 16.6
ec. de transformación:
⎧⎪⎨⎪⎩
x r cos θy r sen θz z
⎧⎪⎪⎪⎨⎪⎪⎪⎩
r x 2 y 2
θ arctg yx
z z
elemento de volumen:
dV = r dr dθ dzelementos de superficie:
dSr = r dθ dzdSθ = dr dzdSz = r dr dθ
elemento de longitud:
ds = dr er + r dθ eθ + dz kds2 = dr2 + r2 dθ2 + dz2
COORDENADAS POLARES PLANAS (r, θ)
Figura 16.7
Como las coordenadas cilíndricas, con z = 0.
ec. de transformación:
⎧⎨⎩
x r cos θy r sen θ
⎧⎪⎪⎨⎪⎪⎩
r x 2 y 2
θ arctg yx
elemento de superficie:
dSz = r dr dθelemento de longitud:
ds = dr er + r dθ eθ
ds2 = dr2 + r2dθ2

§16.3.- Teoremas concernientes al centro de masa. 463
COORDENADAS POLARES ESFÉRICAS (r, θ, φ)
Figura 16.8
ec. de transformación:
⎧⎪⎨⎪⎩
x r sen θ cos φy r sen θ sen φz r cos θ
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
r x 2 y 2 z 2
θ arctg x 2 y 2
z
φ arctg yx
elemento de volumen:
dV = r2 senθ dr dθ dφelementos de superficie:
dSr = r2 senθ dθ dφdSθ = r senθ dr dφdSφ = r dr dθ
elemento de longitud:
ds = dr er + r dθ eθ + r senθ dφ eφ
ds2 = dr2 + r2 dθ2 + r2 sen2θ dφ2
El momento estático (μ) de un sistema de partículas respecto a un plano2 se define como lasuma de los productos de las masas de las partículas por sus distancias respectivas, con signoincluido, al plano (Figura 16.9); esto es,
Figura 16.9
[16.14]μN
i 1
mi δi
Para demostrar el teorema, consideremos un plano quepase por el centro de masas del sistema de partículas,expresado por su ecuación normal:
[16.15]x cosα y cosβ z cosγ δ 0
donde α, β y γ son los ángulos directores del vector normalal plano y δ es la distancia de éste al origen de coordena-das. Las coordenadas de una partícula genérica del sistemason (xi,yi,zi) y su distancia al plano es
[16.16]δ i xi cosα yi cosβ zi cosγ δ
El momento estático del sistema de partículas respecto al plano es
[16.17]μ
N
i 1mi (xi cosα yi cosβ zi cosγ δ )
cosαN
i 1mixi cosβ
N
i 1miyi cosγ
N
i 1mizi δ
N
i 1mi
2 Análogamente se define el momento estático con respeto a un eje o a un punto.

464 Lec. 16.- Geometría de masas.
de modo que, teniendo en cuenta las expresiones
[16.18]MN
i 1mi M xcm
N
i 1mixi M ycm
N
i 1miyi M zcm
N
i 1mizi
se obtiene finalmente
[16.19]μ M (xcm cosα ycm cosβ zcm cosγ δ )
y como, por hipótesis, el centro de masa está contenido en el plano [16.15], es
[16.20]xcm cosα ycm cosβ zcm cosγ δ 0
de donde se sigue que [16.21]μ 0 c.q.d.
Resulta fácil demostrar el teorema recíproco del anterior; esto es,
TEOREMA III.- Si el momento estático de un sistema de partículas respectoa un plano dado es nulo, entonces, el centro de masa del sistema está situadosobre dicho plano.
En efecto, si μ = 0, la expresión [16.19] nos asegura que las coordenadas del centro de masasatisfacen la ec. [16.20], por ser M ≠ 0, lo que significa que el centro de masa está situado sobre elplano dado.
Como consecuencia de estos dos teoremas se siguen inmediatamente los llamadosteoremas de Arquímedes:
TEOREMA IV.- Si un cuerpo tiene un plano de simetría, su centro de masaestá en dicho plano.
La simetría respecto a un plano significa que para cada partícula situada a un lado del planoexiste otra de la misma masa que está situada en su imagen especular respecto al plano. Si se tratade una distribución continua de masa, la simetría respecto a un plano significa que la densidad encualquier punto es igual a la densidad en su imagen especular respecto al plano.
Para demostrar el teorema, basta observar que un plano de simetría es un plano respecto alcual es nulo el momento estático del cuerpo; entonces, de acuerdo con el TEOREMA III, el centrode masa estará situado sobre dicho plano de simetría.
COROLARIO.- Si un cuerpo tiene dos planos de simetría, su centro de masaestá en la recta de intersección de ambos planos.
TEOREMA V.- Si un cuerpo tiene un eje de simetría, su centro de masa estáen dicho eje.
En efecto, el momento estático del cuerpo será nulo respecto a cualquier plano que pase porun eje de simetría, de donde se sigue el teorema.
TEOREMA VI.- Si un cuerpo tiene un centro de simetría, ese punto coincidecon su centro de masa.Basta observar que el momento estático del cuerpo será nulo respecto a cualquier plano que
pase por el centro de simetría, de donde se sigue el teorema.
Los teoremas anteriores nos permiten localizar inmediatamente, sin necesidad delcálculo, el centro de masa en algunos casos (una varilla homogénea, una láminarectangular, un cilindro, una esfera, ...) o bien reducir el problema al cálculo de sólo

§16.3.- Teoremas concernientes al centro de masa. 465
una o dos coordenadas en otros casos. Es conveniente, pues, observar las simetríasque puede tener un cuerpo a fin de simplificar el problema.
Existen otros teoremas que son útiles para simplificar el problema de localizacióndel centro de masa de un cuerpo. El teorema que sigue hace referencia a la propiedaddistributiva del centro de masa; dice así:
TEOREMA VII.- Si un cuerpo se compone de dos o más partes, cuyos centrosde masa están perfectamente localizados, podemos determinar el centro demasa del cuerpo compuesto considerando esas partes como partículaslocalizadas en sus respectivos centros de masa.
Consideremos un cuerpo o sistema de partículas compuesto por N partes, cuyas masasrespectivas sean M1, M2, ... MN, y supongamos que la parte Mk está a su vez constituida por Nk
partículas, de masas mk1, mk2, ... mkNk, situadas en los puntos rk1, rk2, ... rkNk, respectivamente.
El centro de masa de la parte Mk estará localizado en
[16.22]rk,cm
1Mk
Nk
i 1mkir ki con Mk
Nk
i 1mki
El centro de masa del sistema compuesto completo estará localizado en
[16.23]rcm
1M
N
k 1
⎛⎜⎜⎝
⎞⎟⎟⎠
Nk
i 1mki r ki con Mk
N
k i
Nk
i 1mki
Teniendo en cuenta las expresiones [16.22], las expresiones [16.23] adoptan la forma definitiva
[16.24]rcm1M
N
k 1Mk rk,cm con Mk
Nk
i 1mki
que constituyen la expresión matemática del enunciado del teorema.
Todos los teoremas enunciados anteriormente pueden aplicarse en la determina-ción del centro de masa de distribuciones discretas o continuas de materia, homogé-neas o heterogéneas. En cambio, los dos teoremas que siguen, conocidos como teore-mas de PAPUS-GULDIN, son aplicables exclusivamente a la determinación del centrode masa de distribuciones continuas y homogéneas de materia, y relacionan el cen-troide de una curva plana y de una superficie plana con el área y el volumen engen-drados por ellas al girar alrededor de un eje de su plano. Dicen así:
TEOREMA VIII.- El área S de la superficie
C
M
Y
CM
MY
CY
CMY
K
Acr50B.pdf 04/11/2006 03:38:47
Figura 16.10
engendrada por una curva plana al giraralrededor de un eje de su plano que no lacorta es igual al producto de la longitud sde la curva por la longitud L de lacircunferencia descrita por su centroide.
En efecto, suponiendo que el eje de giro sea el x (Figu-ra 16.10), el área generada por el elemento de longitud dsde la curva en su rotación alrededor del eje es
[16.25]dS 2π y ds

466 Lec. 16.- Geometría de masas.
de modo que [16.26]S 2π⌡⌠
s
y ds
y la longitud de la circunferencia descrita por el centroide de la curva es
[16.27]L 2π ycm
Pero, de acuerdo con la definición del centroide de una curva,
[16.28]ycm
⌡⌠
sy ds
⌡⌠
sds
⌡⌠
sy ds
sS
2π s
de donde se sigue el teorema: [16.29]S 2π ycm s L s
TEOREMA IX.- El volumen V engendrado por una superficie plana al girar
Figura 16.11
alrededor de un eje de su plano que no la corta es igual al producto del áreaS de la superficie por la longitud L de la circunferencia descrita por sucentroide.
En efecto, suponiendo como antes que el eje degiro sea el x (Figura 16.11), el volumen engendrado porel elemento de área dS = dx dy al girar alrededor del ejex es
[16.30]dV 2π y dS
de modo que [16.31]V 2π ⌡⌠
S
y dS
y la longitud de la circunferencia descrita por el cen-troide de la superficie plana es
[16.32]L 2π ycm
Ahora bien, de acuerdo con la definición del centroidede una superficie plana es
[16.33]ycm
⌡⌠
Sy dS
⌡⌠
SdS
⌡⌠
Sy dS
SV
2π S
de donde se sigue el teorema: [16.34]V 2π ycm S L S
Ejemplo II.- Determinar el centro de masa de una
Figura 16.12
varilla rectilínea, de sección transversal constante, vaaumentando linealmente conforme nos distanciamos deuno de sus extremos.
Tomemos el eje x a lo largo de la varilla; ladensidad lineal vendrá expresada en la forma

§16.3.- Teoremas concernientes al centro de masa. 467
λ λ0 kx
donde k es una constante y λ0 es la densidad en el extremo x = 0. Teniendo en cuenta que dm=λdx, la posición del centro de masa vendrá dada por
xcm
⌡⌠
L
0x dm
⌡⌠L
0dm
⌡⌠
L
0λ x dx
⌡⌠L
0λ dx
resultando que ⌡⌠
L
0
λ dx ⌡⌠
L
0
(λ0 kx) dx λ0L12
kL 2
⌡⌠
L
0
λ x dx ⌡⌠
L
0
(λ0 kx) x dx 12λ0L
2 13
kL 3
de modo que xcm
3λ0L 2kL 2
6λ0 3kL
⎛⎜⎜⎝
⎞⎟⎟⎠
3λ0 2kL
6λ0 3kLL
Si k = 0 (varilla homogénea), será xcm = L/2.
Si λ0 = 0, será xcm = 2L/3.
Ejemplo III.- Determinar el centro de masa
Figura 16.13
(centroide) de un arco completo de cicloide,como el representado en la Figura 16.13.
Las ecuaciones paramétricas de la cicloi-de son:
x a (φ senφ ) y a (1 cosφ )
de modo que
dx a (1 cosφ )dφ dy a senφ dφ
y el elemento de longitud ds es
ds dx 2 dy 2 a 2 (1 cosφ ) dφ 2 a sen φ2
dφ
de donde se sigue ⌡⌠
s
ds ⌡⌠
2π
0
2a sen φ2
dφ 8a
⌡⌠
s
x ds ⌡⌠
2π
0
2a 2 (φ senφ ) sen φ2
dφ 8π a 2
⌡⌠
s
y ds ⌡⌠
2π
0
2a 2 (1 cosφ ) sen φ2
dφ 323
a 2
y el centroide del arco completo de cicloide está localizado en

468 Lec. 16.- Geometría de masas.
xcm
⌡⌠
sx ds
⌡⌠
sds
8πa 2
8aπa ycm
⌡⌠
sy ds
⌡⌠
sds
32
3a 2
8a43
a
Ejemplo IV.- .- Determinar la posición del centro de masa de la
Figura 16.14
lámina homogénea que se muestra en la Figura 16.14.
Se trata de un disco de radio R y masa (completa) m1 = σS= σπR2, cuyo centro de masa se encuentra en x1=0, al que le faltaun disco de radio R/4 y masa m2 = σS′ = σπR2/16, cuyo centro demasa está en x2=3R/4. El centro de masa resultante se encuentrasobre la línea que une los dos centros de masa parciales; i.e.,sobre el eje x, en una posición xcm dada por [16.24]
xcm
(σπR 2)(0) ( σπR 2/16)(3R/4)
(σπR 2) ( σπR 2/16)
R20
Ejemplo V.- Determinar el centro de masa de una lámina plana y homogénea cuya forma es la de
Figura 16.15
una semielipse de semiejes a y b.
Las ecuaciones de las líneas que delimitan dicha superficie pueden escribirse, mediante unaadecuada elección de los ejes xy, en la forma
z 0 x 2
a 2
y 2
b 21
En esas condiciones, el centro de masa seencontrará situado sobre el eje y (por serdicho eje de simetría), de modo que xcm = 0.Para ycm tenemos
ycm
⌡⌠
Sy dS
⌡⌠
SdS
⌡⌠⌡⌠
Sy dx dy
⌡⌠⌡⌠
Sdx dy
con3
⌡⌠⌡⌠
Sdx dy ⌡
⌠a
a
dx⌡⌠b ⎯⎯⎯⎯1 x 2/a 2
0
dy ⌡⌠
a
a
b 1 x 2
a 2dx 1
2πab
3
⌡⌠ a 2 x 2 dx 1
2
⎛⎜⎜⎝
⎞⎟⎟⎠
x a 2 x 2 a 2 arcsen xa

§16.3.- Teoremas concernientes al centro de masa. 469
⌡⌠⌡⌠
Sy dx dy ⌡
⌠a
a
dx⌡⌠b ⎯⎯⎯⎯1 x 2/a 2
0
y dy ⌡⌠
a
a
b 2
2
⎛⎜⎜⎝
⎞⎟⎟⎠
1 x 2
a 2dx 2
3ab 2
de modo que
ycm
2
3ab 2
1
2πab
43π
b
Ejemplo VI.- Determinar el centroide de un cascarón hemiesférico de radio R.
Figura 16.16
Las coordenadas polares esféricas se adaptan perfectamente a la geometría del cuerpo. Elelemento de superficie sobre la esfera de radio R viene expresado en coordenadas polares esféricaspor:
dS R 2 senθ dθ dφ
El centroide del cascarón hemiesféricoestará situado sobre su eje de simetría, demodo que, de acuerdo con la elección de losejes en la Figura 16.16, es xcm = 0 e ycm = 0.Para la coordenada zcm tenemos
zcm
⌡⌠
Sz dS
⌡⌠
SdS
con z R cosθ
Al resolver las integrales anteriores, resulta:
⌡⌠
SdS ⌡
⌠⌡⌠
SR 2 senθ dθ dφ R 2
⌡⌠
π/2
0
senθ dθ ⌡⌠
2π
0
dφ 2π R 2
⌡⌠
Sz dS ⌡
⌠⌡⌠
S(R cosθ) (R 2 senθ dθ dφ) R 3
⌡⌠
π/2
0
senθ cosθ dθ ⌡⌠
2π
0
dφ π R 3
o sea zcm
πR 3
2πR 2
R2
Ejemplo VII.- Aplicar el primer teorema de Pappus-Guldin para determinar el centroide de unasemicircunferencia de radio R.
Tomando los ejes cartesianos xy como se indica en la Figura 16.17, el centroide del arco decircunferencia se encontrará situado sobre el eje y (o sea, xcm = 0), por ser dicho eje un eje desimetría; bastará con determinar ycm.
El área de la superficie de revolución engendrada por la semicircunferencia al girar alrededordel eje x es la de una esfera; esto es,

470 Lec. 16.- Geometría de masas.
Figura 16.17
S 4π R 2
y la longitud de la línea es
s π R
de modo que, sustituyendo en la expresión [16.29], tenemos
4π R 2 2π ycmπ R ⇒ ycm
2π
R
Ejemplo VIII.- Aplicar el segundo teorema de Pappus-Guldin para determinar el centroide del área
Figura 16.18
sombreada en la Figura 16.18, limitada por la semicircunferencia de radio a y la semielipse desemiejes a y b.
Obviamente, el centroide de esa figura se encontrará situado sobre el eje y (o sea, xcm = 0);bastará con determinar ycm.
El volumen de cuerpo de revolución engendradopor el área sombrada al girar alrededor del eje x es el deuna esfera menos el de un elipsoide de revolución;
V 43πa 3 4
3πab 2 4
3πa (a 2 b 2)
y el área de la superficie sombrada es
S 12πa 2 1
2πab 1
2πa (a b)
de modo que, sustituyendo en la expresión [16.34],tenemos
43πa (a 2 b 2) 2π ycm
12πa (a b) ⇒ ycm
43π
a 2 b 2
a b4
3π(a b)
§16.4. Momentos de inercia.- De un modo completamente general
se define el momento de inercia de una distribución de materia con respectoa un punto, a un eje o a un plano como la suma de los productos obtenidosmultiplicando la masa de cada una de las partículas que constituyen elsistema material por el cuadrado de su distancia a dicho punto, eje o plano,respectivamente.
Estos momentos de inercia suelen recibir los nombres de polar, axial yplanario, respectivamente; están siempre representados por un número positivo, y susunidades en el sistema S.I. son kg m2.
El momento de inercia de una distribución discreta de materia con respecto a unpunto, a un eje o a un plano cualquiera se calculará utilizando la expresión

§16.4.- Momentos de inercia. 471
[16.35]Ii
mi δ2i
donde δi representa la distancia de la partícula i-ésima, de masa mi, al punto, eje(Figura 16.19) o plano (Figura 16.9) considerado.
El momento de inercia polar respecto del origen O de un sistema de coordenadascartesianas xyz, que representaremos por IO, viene dado por
[16.36]IOi
mi (x 2i y 2
i z 2i )
Los momentos de inercia axiales con respecto a los ejes cartesianos x, y y z, quedesignaremos por Ixx, Iyy e Izz, respectivamente, se calcularán mediante las expresionessiguientes:
[16.37]Ixxi
mi (y 2i z 2
i ) Iyyi
mi (x 2i z 2
i ) Izzi
mi (x 2i y 2
i )
Los momentos de inercia planarios con respecto a los planos cartesianos x=0(plano yz), y=0 (plano xz) y z=0 (plano xy) los representaremos por Ix, Iy e Iz,respectivamente, y se calculan mediante las expresiones siguientes:
[16.38]Ixi
mi x2i Iy
i
mi y2i Iz
i
mi z2i
Para una distribución continua de materia, sustituiremos los sumatorios de las
Figura 16.19 Figura 16.20
expresiones anteriores por integrales extendidas a todo el recinto ocupado por ladistribución. Esto es, la expresión [16.35] pasa a ser
[16.39]I ⌡⌠
R
δ2 dm
Así, tendremos una integral de línea, de superficie o de volumen según se trate deun cuerpo con una distribución lineal, superficial o cúbica de su masa. Por tanto,

472 Lec. 16.- Geometría de masas.
tendremos en cuenta la masa del elemento de línea, de superficie o de volumen,respectivamente
[16.40]dm λ ds dm σ dS dm ρ dV
donde λ, σ y ρ son la densidad lineal, superficial y cúbica y ds, dS y dV loselementos de longitud, de área y de volumen, correspondientes. Así, tendremos
[16.41]I ⌡⌠
C
λ δ2 ds I ⌡⌠
S
σ δ2 dS I ⌡⌠
V
ρ δ2 dV
En el caso de que la distribución continua de materia sea homogénea, la densidadserá constante y podemos escribir
[16.42]I λ ⌡⌠
C
δ2 ds I σ ⌡⌠
S
δ2 dS I ρ ⌡⌠
V
δ2 dV
de modo que la integral se reduce a un factor geométrico para todos los cuerposhomogéneos de la misma forma y tamaño.
§16.5. Radio de giro.- Una magnitud estrechamente relacionada con elmomento de inercia respecto a un eje es el radio de giro K, definido por
[16.43]I mK 2 → K I
m
donde I es el momento de inercia del cuerpo respecto al eje considerado y m es lamasa del cuerpo. El radio de giro K representa la distancia del eje a la que deberíaencontrarse una masa igual a la del cuerpo para que tuviera el mismo momento deinercia que el cuerpo respecto a dicho eje.
§16.6. Productos de inercia.- De un modo completamente general,
se definen los productos de inercia de un sistema material respecto a dosplanos ortonormales como la suma, cambiada de signo, de los productosobtenidos multiplicando la masa de cada una de las partículas que constitu-yen el sistema material por sus distancias (con signo) a dichos planos.Los productos de inercia pueden tener valores positivos o negativos y sus
unidades en el sistema S.I. son kg m2.El producto de inercia de una distribución discreta de materia con respecto a dos
planos ortonormales, π1 y π2 (Figura 16.21), se calcula utilizando la expresión
[16.44]I12i
mi δ1,i δ2,i
donde δ1,i y δ1,i son las distancias de la partícula i-ésima, de masa mi, a los planos π1
y π2, incluyéndose el signo negativo en la definición.

§16.6.- Productos de inercia. 473
En particular, los productos de inercia de un
Figura 16.21
sistema material con respecto a los planos cartesia-nos x=0 (plano yz), y=0 (plano xz) y z=0 (plano xy)los representaremos por Ixy, Iyz e Izx y se calculanmediante las expresiones:
[16.45]
Ixy Iyxi
mi xi yi
Ixz Izxi
mi xi zi
Iyz Izyi
mi yi zi
En el caso de una distribución continua demateria, los sumatorios de las expresiones anteriores serán sustituidos por integralesextendidas a todo el recinto R ocupado por el cuerpo. Esto es
[16.46]I12 ⌡⌠
R
δ1 δ2 dm
y las expresiones [16.45] se escriben en la forma
[16.47]
Ixy Iyx ⌡⌠
R
x y dm Ixz Izx ⌡⌠
R
x z dm
Iyz Izy ⌡⌠
R
y z dm
Así, pues, tendremos que resolver, como para los momentos de inercia, una integralde línea, de superficie o de volumen según tengamos una distribución lineal,superficial o cúbica de la masa del cuerpo. Si, además, el sistema material eshomogéneo, las integraciones se reducen a un factor geométrico.
Podemos decir que dos planos son planos principales de inercia de un cuerpocuando son perpendiculares entre sí y el producto de inercia respecto de ellos es nulo.La intersección de dos planos principales de inercia es un eje principal de inercia.
Si se verifica que todos los productos de inercia con respecto de los planoscoordenados son nulos, entonces los planos coordenados son los plano principalesde inercia relativos al punto O. Las intersecciones de dichos planos, dos a dos (i.e.,los ejes coordenados), son entonces los ejes principales de inercia en el punto O.
§16.7. Matriz de inercia.- La notación con doble subíndice para los momentosy productos de inercia de una distribución de masas nos sugiere organizar dichoselementos en la forma de una matriz cuadrada de 3 × 3. En efecto, en un sistema decoordenadas cartesianas xyz, con origen en el punto O, podemos disponer losmomentos de inercia respecto de los ejes cartesianos como los elementos diagonalesde una matriz y los productos de inercia con respecto de los planos coordenadoscomo los elementos no diagonales; i.e.,

474 Lec. 16.- Geometría de masas.
[16.48]II
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
siendo II la matriz de inercia que, como veremos en la Lec. 20, juega un papelrelevante en la Dinámica del Sólido Rígido.
Obsérvese que la matriz de inercia es simétrica, ya que se cumple que
Ixy Iyx Ixz Izx Iyz Izy
por lo que queda definida tan sólo por seis elementos.
§16.8. Teoremas concernientes a los momentos y productos de inercia.-En general, la evaluación de una integral de algunos de los tipos de [16.41] y [16.47]
nos conducirá a una integración de línea, doble o triple, según que la masa estédistribuida sobre una línea, sobre una superficie o en un volumen. En ocasiones, serásuficiente la elección de coordenadas cartesianas (x,y,z) para valorar dichas integrales.Sin embargo, en muchos casos se conseguirá una notable simplificación del problemamediante la adopción de un sistema de coordenadas curvilíneas (coordenadas polares,cilíndricas, ...vide página 462) que convenga a las características geométricas delcuerpo cuyos momentos de inercia deseamos determinar. Al final de este epígraferesolveremos algunos problemas que ilustrarán el uso de las técnicas de cálculoasociadas con la determinación de momentos de inercia de algunas formasgeométricas notables.
Aparte de los recursos generales del Cálculo, existen varios teoremas quefacilitan, en ocasiones, la evaluación de los momentos y productos de inercia. Estosteoremas se demuestran tanto para una distribución discreta de materia como para unadistribución continua caracterizada por una densidad (volúmica, superficial o lineal)que es una función de las coordenadas (x,y,z, por ejemplo) de cada elemento de masade la distribución. Cualquiera que sea el punto de vista que adoptemos parademostrarlos, siempre podremos hacer una demostración paralela, con simplescambios en la notación, desde el otro punto de vista.
TEOREMA I.- La suma de los momentos de inercia con respecto a tres planosortonormales que se interceptan en un punto es igual al momento de inerciacon respecto a dicho punto de intersección.
En efecto, sumando miembro a miembro las tres expresiones [16.38], concernientes a losmomentos de inercia respecto a los tres planos coordenados cartesianos, se obtiene
[16.49]Ix Iy Izi
mi (x 2i y 2
i z 2i )
imir
2i IO
de modo que dicha suma es isótropa, i.e., independiente de la orientación del cuerpo respecto a losplanos coordenados. Obsérvese que el sumatorio del segundo miembro de [16.49] es el momento deinercia del cuerpo respecto al origen de coordenadas o momento de inercia polar, de donde se sigueel teorema.

§16.8.- Teoremas concernientes a los momentos y productos de inercia. 475
TEOREMA II.- La suma de los momentos de inercia con respecto a tres ejesperpendiculares que se interceptan en un punto es igual al doble delmomento de inercia con respecto a dicho punto de intersección.
En efecto, sumando miembro a miembro las tres expresiones [16.37] concernientes a losmomentos de inercia respecto a los tres ejes coordenados (ortogonales) se obtiene
[16.50]Ixx Iyy Izz 2i
mi (x 2i y 2
i z 2i ) 2
imir
2i 2 IO
de modo que dicha suma es isótropa, i.e., independiente de la orientación del cuerpo respecto a losejes coordenados. Obsérvese que el sumatorio del segundo miembro de [16.50] es el momento deinercia del cuerpo respecto al origen de coordenadas o momento de inercia polar, de donde se sigueel teorema.
En muchos problemas nos resultará útil el llamado Teorema de los PlanosPerpendiculares, que se enuncia así:
TEOREMA III.- El momento de inercia con respecto a un eje es igual a lasuma de los momentos de inercia con respecto a dos planos normales quecontengan al eje.En efecto, de acuerdo con la definición del momento de inercia de un cuerpo respecto de un
plano, los momentos de inercia respecto de los planos coordenados yz (de ecuación x = 0), xz (deecuación y = 0) y xy (de ecuación z = 0), que designaremos respectivamente por Ix, Iy y Iz, son
[16.51]Ixi
mi x2i Iy
imi y
2i Iz
imi z
2i
Sumando miembro a miembro dos cualesquiera de los momentos de inercia respecto a los planoscoordenados se obtiene
[16.52]
Iy Izi
mi (y 2i z 2
i ) Ixx Iz Ixi
mi (z 2i x 2
i ) Iyy
Ix Iyi
mi (x 2i y 2
i ) Izz
lo que demuestra el teorema.Una variante del teorema anterior, llamada Teorema de los Ejes Perpendiculares
Figura 16.22
es muy útil para el cálculo de momentos de inercia de láminas planas delgadas.
TEOREMA IV.- La suma de los momentos deinercia de una lámina plana respecto a dosejes perpendiculares entre sí y contenidos enel plano de la lámina es igual al momento deinercia de la lámina respecto a un ejeperpendicular a su plano y que pasa por elpunto de intersección de los dos ejesanteriormente citados.Tomemos un sistema de ejes ortogonales de forma que
la lámina se encuentre situada en el plano xy (Figura 16.22).Los momentos de inercia de la lámina con respecto a cadauno de los ejes coordenados son

476 Lec. 16.- Geometría de masas.
[16.53]Ixxi
mi y2i Iyy
imi x
2i Izz
imi (x 2
i y 2i )
de modo que, evidentemente, se cumple
[16.54]Ixx Iyy Izz
En relación con los planos y ejes principales de inercia, tenemos los siguientes
Figura 16.23 Figura 16.24
teoremas:
TEOREMA V.- Si un cuerpo posee un plano de simetría, el producto de iner-cia respecto de dicho plano y de otro perpendicular es nulo. Dichos planosson planos principales de inercia del cuerpo.
En efecto, si elegimos como plano xy el de simetría (Figura 16.23), a todo elemento de masami de coordenadas (xi,yi,zi) le corresponde otro elemento de la misma masa de coordenadas (xi,yi,-zi),de modo que al extender las sumas
Ixz Izxi
mi xi zi 0 Iyz Izyi
mi yi zi 0
a todo el cuerpo, el resultado será cero.
COROLARIO 1.- Si un cuerpo posee dos
Figura 16.25
planos de simetría, la intersección de dichosplanos es un eje principal de inercia delcuerpo (Figura 16.24).
COROLARIO 2.- Todo plano de simetría de uncuerpo es perpendicular a un eje principal delmismo.
TEOREMA VI.- Si un cuerpo posee un eje desimetría de revolución, dicho eje es ejeprincipal de inercia.
En efecto, si el sólido tienen simetría de revolución alrededor del eje z (Figura 16.25), entoncesserá Ixz= 0 y Iyz= 0, puesto que para cualquier elemento de masa mi situado en (xi,yi,zi) existe otroelemento de la misma masa situado en (-xi,-yi,zi) de modo que al efectuar las sumas
Ixz Izxi
mixizi 0 Iyz Izyi
miyizi 0

§16.8.- Teoremas concernientes a los momentos y productos de inercia. 477
extendidas a todos los elementos del sólido, el resultado será cero. En consecuencia, los planos xze yz son planos principales de inercia y su intersección (el eje z) es un eje principal de inercia.
§16.9. Teoremas de Steiner.- Los momentos de inercia de un sistema materialcon respecto a un punto, eje o plano dependen de la distribución de la masa delsistema con relación a dicho punto, eje o plano. Si cambiamos de punto, eje o plano,los momentos de inercia también cambiarán. A continuación vamos a relacionar losmomentos de inercia de un cuerpo con respecto a un punto, un eje o un plano arbi-trarios con los momentos de inercia con respecto al centro de masas y a un eje o unplano que sean paralelos a los anteriores y que pasen por el centro de masa.
TEOREMA VII.- Teorema de Steiner para los momentos planarios. El mo-mento de inercia con respecto a un plano cualquiera es igual al momento deinercia respecto a un plano paralelo al anterior que pase por el centro demasa más el producto de la masa del cuerpo por el cuadrado de la distanciaentre ambos planos.
Consideremos un sistemas de ejes coordenados Oxyz arbitrario y otro sistema de ejescoordenados Gξηζ paralelos a los anteriores y cuyo origen está situado en el centro de masas dela distribución de materia. Sean xcm, ycm y zcm las coordenadas del centro de masa (G) del sistemamaterial en el referencial Oxyz (Figura 16.26). Las coordenadas de un elemento material genérico, demasa dm, en los dos sistemas de ejes coordenados están relacionadas por
[16.55]x xcm ξ y ycm η z zcm ζ
El momento de inercia del sistema material respecto
Figura 16.26
del plano Oxy es
[16.56]Iz ⌡
⌠z 2 dm ⌡⌠(zcm ζ)2 dm
⌡⌠ζ2 dm 2zcm ⌡
⌠ζ dm z 2cm⌡⌠dm
pero , por representar la posición del centro⌡⌠ζ dm 0
de masa en el referencial del centro de masa; por consi-guiente podemos escribir
[16.57]Iz Iζ mz 2cm
lo que demuestra el teorema. Del mismo modo:
[16.58]Ix Iξ mx 2cm Iy Iη my 2
cm
TEOREMA VIII.- Teorema de Steiner para los momentos axiales. El mo-mento de inercia con respecto a un eje cualquiera es igual al momento deinercia respecto a un eje paralelo al anterior que pase por el centro de masamás el producto de la masa del cuerpo por el cuadrado de la distancia entreambos ejes.En efecto, de acuerdo con el Teorema III, el momento de inercia con respecto al eje z será
[16.59]Izz Ix Iy Iξ Iη m (x 2cm y 2
cm) Iζζ m (x 2cm y 2
cm)

478 Lec. 16.- Geometría de masas.
Figura 16.27

§16.9.- Teoremas de Steiner. 479
siendo (x2cm+y2
cm) el cuadrado de la distancia entre los ejes z y ζ, lo que demuestra el teorema. Delmismo modo:
[16.60]Ixx Iξξ m (y 2cm z 2
cm) Iyy Iηη m (x 2cm z 2
cm)
TEOREMA IX.- Teorema de Steiner para los momentos polares. Elmomento de inercia con respecto a un punto cualquiera es igual al momentode inercia respecto al centro de masa más el producto de la masa del cuerpopor el cuadrado de la distancia entre ambos puntos.De acuerdo con el Teorema I, el momento de inercia con respecto al punto O viene dado por
[16.61]IO Ix Iy Iz Iξ Iη Iζ m (x 2cm y 2
cm z 2cm)
esto es, [16.62]IO IG m D 2
siendo D la distancia OG, lo que demuestra el teorema.
En el Problema 16.24 proponemos la demostración del siguiente teorema:
TEOREMA X.- Teorema de Steiner para los productos de inercia. El pro-ducto de inercia de un cuerpo respecto a un par de planos perpendiculareses igual al producto de inercia respecto a otro par de planos paralelos a losanteriores y que pasan por el centro de masa del cuerpo, menos el productode la masa del cuerpo por las distancias entre los respectivos planos.Esto es, si tenemos un sistema de ejes cartesianos (x,y,z) y otro sistema de ejes (ξ,η,ζ) que es
una simple traslación del sistema de ejes anterior hasta llevar su origen al centro de masa delcuerpo (Figura 16.26), se verifica:
[16.63]Ixy Iξη mxcmycm Iyz Iηζ mycmzcm Izx Iζξ mzcmxcm
§16.10. Momento de inercia respecto a
Figura 16.28
un eje cualquiera.- Ahora vamos a relacionarel momento de inercia de un cuerpo respecto aun eje cualquiera con los momentos y productosde inercia del cuerpo respecto a un sistema deejes coordenados xyz concurrente con el ejedado.
Sea e el versor en la dirección del eje. Dichoversor vendrá expresado en función de los cosenosdirectores por
[16.64]e cosα cosβ cosγ xyz
Consideremos el elemento de masa dm y sea r su vectorde posición respecto al origen de coordenadas. El momento de inercia del cuerpo respecto al ejedado es
[16.65]I ⌡⌠
R
δ2 dm ⌡⌠
R
(r × e)2 dm
ya que δ2 = (r×e)2 es el cuadrado de la distancia del elemento de masa dm al eje dado. Como

480 Lec. 16.- Geometría de masas.
δ2 (r×e)2
⎡⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎦
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
x
y
z
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
cos αcos βcos γ
2 ⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
y cosγ z cosβz cosα x cosγx cosβ y cosα
2
(y cosγ z cosβ)2 (z cosα x cosγ)2 (x cosβ y cosα)2
[16.66](y 2 z 2)cos2α (x 2 z 2)cos2β (x 2 y 2)cos2γ
2xy cosα cosβ 2xz cosα cosγ 2yz cosβ cosγ
de modo que la expresión [16.65] nos conduce, después de sustituir las expresiones de definición delos momentos y productos de inercia, a la relación
[16.67]I Ixx cos2α Iyy cos2β Izz cos2γ
2Ixy cosα cosβ 2Ixz cosα cosγ 2Iyz cosβ cosγ
que nos permite determinar el momento de inercia con respecto a un eje definido por sus cosenosdirectores si conocemos los momentos y productos de inercia del cuerpo respecto a un sistema deejes coordenados concurrentes con el eje dado.
Utilizando la notación matricial podemos escribir la expresión [16.67] haciendointervenir la matriz de inercia; i.e.,
[16.68]I cosα cosβ cosγ xyz
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
cosαcosβcosγ xyz
o sea [16.69]I e II e
como el lector puede comprobar sin más que efectuar los productos matriciales.
Ejemplo IX.- Varilla o barra delgada.- Calcular el momento de inercia de una varilla homogénea
Figura 16.29
respecto de un eje perpendicular a la misma y que pasa: a) por uno de sus extremos; b) por sucentro de masa.
a) Consideremos el elemento de longitud dm = λ ds= λ dx, como se indica en la figura. El momento deinercia pedido será
I ⌡⌠
L
0
x 2 dm λ ⌡⌠
L
0
x 2 dx λ ⎛⎜⎝
⎞⎟⎠
x 3
3
L
0
13λ L 3 1
3(λ L) L 2 1
3mL 2
b) Podemos proceder como en el apartado anterior,sin más que extender la integración entre -L/2 y +L/2, obien aplicar el teorema de Steiner:

§16.10.- Momento de inercia respecto a un eje cualquiera. 481
Icm IO mD 2 13
mL 2 m ⎛⎜⎝
⎞⎟⎠
L2
2 112
mL 2
Ejemplo X.- Lámina rectangular delgada.- a) Determinar los momentos y productos de inercia parauna lámina rectangular, delgada y homogénea, respecto de los ejes indicados en la figura.b) Calcular el momento de inercia respecto de una diagonal de la lámina.
Comenzamos calculando el momento de inercia respecto del eje x. Para ello, descomponemos
Figura 16.30 Figura 16.31
la lámina en estrechas bandas paralelas al eje x (sombreado claro en la figura), de modo que todala masa de cada una de dichas bandas equidista del eje x. Sea dy el espesor de una banda genéricasituada a una distancia y del eje x; su masa será dm = σdS = σa dy. Entonces
Ixx ⌡⌠
S
y 2 dm σ a ⌡⌠
b2
b2
y 2 dy σ a ⎡⎢⎣
⎤⎥⎦
y 3
3
b2
b2
13σ a b 3
4112
σ ab b 2 112
mb 2
y, análogamente, se obtiene Iyy112
ma 2
El Teorema IV (ejes perpendiculares) nos permite determinar
Izz Ixx Iyy112
m (a 2 b 2 )
Por estar contenida toda la masa de la lámina en el plano z = 0, serán nulos los siguientes productosde inercia:
Ixz Izx 0 Iyz Izy 0
Para calcular Ixy consideramos un elemento de superficie dS = dx dy, cuya masa es dm = σ dx dy,
Ixy Iyx ⌡⌠
S
xy dm σ ⌡⌠
a2
a2
x dx ⌡⌠
b2
b2
y dy σ ⎡⎢⎣
⎤⎥⎦
x 2
2
a2
a2
⎡⎢⎣
⎤⎥⎦
y 2
2
b2
b2
0
como era de esperar, ya que para cada elemento de superficie dS de coordenadas (x,y,0) existe otrode coordenadas (-x,y,0), lo que hace que sea Ixy = 0.

482 Lec. 16.- Geometría de masas.
La matriz de inercia es II 112
m
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
b 2 0 0
0 a 2 0
0 0 a 2 b 2
b) Para determinar el momento de inercia respecto de una diagonal (v.g., PQ), comenzamospor determinar el versor correspondiente a esa dirección; i.e.,
e 1
a 2 b 2
a b 0
de modo que, aplicando [16.69], tenemos
Id e II e 1
a 2 b 2
a b 0 112
m
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
b 2 0 0
0 a 2 0
0 0 a 2 b 2
1
a 2 b 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
a
b
0
112
ma 2 b 2
a b 0
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
b 2 0 0
0 a 2 0
0 0 a 2 b 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
a
b
0
112
m 2 a 2 b 2
a 2 b 2
16
m a 2 b 2
a 2 b 2
Ejemplo XI.- Esfera hueca.- a) Calcular el momento de inercia
Figura 16.32
de una esfera hueca y homogénea respecto de uno cualquiera desus diámetros. b) Determinar la matriz de inercia en el centro dela esfera.
a) Puesto que toda la masa de la esfera se encuentra a lamisma distancia del centro de la esfera (O), el momento polaren dicho centro será
IO mR 2
por lo que al aplicar el Teorema II, teniendo en cuenta que losmomentos de inercia son iguales respectos de cualquier diámetro de la esfera, se sigue
Ixx Iyy Izz 3 Id 2 IO → Id
23
IO
23
mR 2
b) Como consecuencia de la simetría de revolución, es fácil comprender que todos losproductos de inercia son nulos, por lo que escribiremos
II 23
mR 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
1 0 0
0 1 0
0 0 1

§16.10.- Momento de inercia respecto a un eje cualquiera. 483
Ejemplo XII.- Esfera maciza.- Determinar el momento de
Figura 16.33
inercia de una esfera maciza y homogénea respecto a:a) uno cualquiera de sus diámetros, b) un eje tangente a lasuperficie de la esfera.
a) Consideremos la esfera maciza compuesta porinfinitas esferas huecas o capas esféricas concéntricas. Seadr el espesor de una capa esférica genérica de radio r; sumasa es
dm ρ dV ρ 4πr 2dr
y su momento polar en el centro de la esfera (O) es
dIO r 2 dm r 2 (ρ 4πr 2 dr) ρ 4πr 4 dr
de modo que el momento polar en O de la esfera vale
IO ⌡⌠
R
0
dIO ρ 4π ⌡⌠
R
0
r 4 dr ρ 4π ⎡⎢⎣
⎤⎥⎦
r 5
5
R
0
ρ 45πR 5 3
5ρ 4
3πR 3 R 2 3
5mR 2
por lo que a aplicar el Teorema II, teniendo en cuenta que los momentos de inercia son igualesrespectos de cualquier diámetro de la esfera, se sigue
Ixx Iyy Izz 3 Id 2 IO ⇒ Id
23
IO
23
35
mR 2 25
mR 2
b) Aplicando el teorema de Steiner tenemos
I′ 25
mR 2 mR 2 75
mR 2
Ejemplo XIII.- Cilindro macizo.- Determinar el momento de inercia de un cilindro recto circular
Figura 16.34
y homogéneo con respecto a un eje perpendicular a su eje de simetría de revolución y que pasa porsu centro.
Un breve reflexión nos descubrirá que elmomento de inercia del cilindro respecto delplano z=0 (i.e., Iz) está dado por la mismaexpresión que el momento de inercia de unavarilla o barra delgada respecto a un ejeperpendicular a la misma y que pasa por sucentro; esto es
Iz112
mL 2
y, análogamente, el momento de inercia delcilindro respecto del plano x=0 (i.e., Ix) estádado por la misma expresión que el momentode inercia de una lámina circular respecto deuno de sus diámetros; esto es

484 Lec. 16.- Geometría de masas.
Ix14
mR 2
Entonces, aplicando el Teorema III (Planos Perpendiculares) el momento pedido es la sumade los dos anteriores:
Iyy Ix Iz14
mR 2 112
mL 2
Figura 16.35
Ejemplo XIV.- Cono circular.- Calcular el momento de inercia deun cono recto de base circular, macizo y homogéneo con respectoa su eje de revolución.
Tomamos como elemento de volumen una rodaja del conocortada perpendicularmente a su eje de revolución, como se ilustraen la figura. La masa elemental es
dm ρ dV ρ π r 2 dz
El momento de inercia elemental respecto del eje z (i.e., dIzz) es elde un disco de masa dm y radio r:
dIzz12
r 2 dm 12ρ π r 4 dz
de modo que el momento de inercia del cono, Izz, se obtiene porintegración:
Izz ⌡⌠
V
12
r 2 dm 12ρ π ⌡
⌠V
r 4 dz
Para poder integrar, puesto que aparecen dos variables en el integrando, haremos
r z tgα → dr dz tgα RH
dz
o sea
Izz12ρ π ⌡
⌠V
r 4 dz 12ρ π H
R ⌡⌠
R
0
r 4 dr 12ρ π H
RR 5
5310
ρ ⎛⎜⎝
⎞⎟⎠
13πR 2 H R 2 3
10mR 2
donde hemos tenido en cuenta el valor del volumen del cono, i.e., .13πR 2 H

Problemas 485
Problemas
16.1.- Cuatro partículas, cuyas masas respecti-vas son 1, 2, 3 y 4 unidades, están situadas enlos puntos (1,2,0), (3,1,0), (1,1,3) y (0,4,2),respectivamente. Determinar la posición delcentro de masa de las cuatro partículas.
16.2.- Tres partículas idénticas están situadasen los vértices de un triángulo. Demostrar queel centro de masa de las partículas está locali-zado en el punto de intersección de las tresmedianas del triángulo.
16.3.- Tres partículas, cuyas masas son m1, m2
y m3, están situadas en los vértices de untriángulo. Sean a1, a2 y a3 las longitudes de loslados opuestos a cada uno de los vértices deltriángulo. Demostrar que el centro de masa delsistema se encuentra en el punto deintersección de las tres bisectrices del triángulosi y sólo si m1/a1 = m2/a2 = m3/a3.
16.4.- Arcos de circunferencia. Determinar laposición del centroide de las curvas siguientes:a) un arco de circunferencia de semiamplitudangular α, b) un cuadrante de circunferencia yc) una semicircunferencia.
16.5.- Bastón. Determinar la posición delcentro de masa de un bastón hecho con unabarra de sección transversal y densidad cons-tante cuyo puño tiene forma semicircular, deradio R, siendo L la longitud del mástil.
16.6.- Baricentro del triángulo. Demostrarque el centro de masa de una lámina plana yhomogénea de forma triangular se encuentraen el punto de intersección de las tres media-nas (baricentro) de dicho triángulo.
16.7.- Porciones de círculo. Determinar laposición del centroide de las siguientes super-ficies: a) un sector circular de semiamplitudangular α, b) un cuadrante de círculo, c) unsemicírculo, d) un segmento circular de unabase, e) un segmento circular de dos bases.
16.8.- Determinar el centroide del segmentoparabólico limitado por la parábola y = ax2 yla recta y = H, en el plano xy.
16.9.- Cicloide. Localizar el centroide de lasuperficie limitada por un arco completo de lacicloide
x = a(φ - senφ) y = a(1 - cosφ)
y el eje x.
16.10.- Hipocicloide. Determinar la posición
Prob. 16.10
del centro de masa de una lámina plana yhomogénea cuyaforma es la delc u a d r a n t e d ehipocicloide
x23 y
23 a
23
sombreado en lafigura adjunta.Nota: las ecuacio-nes paramétricasde la hipocicloide son: x=acos3φ, y=asen3φ.
16.11.- Conos. Determinar la posición delcentro de masa de los siguientes cuerpos,continuos y homogéneos: a) un cono recto debase circular, b) un tronco de cono.
16.12.- Localizar el centro de masa de un te-traedro regular.
16.13.- Porciones de esfera. Determinar laposición del centro de masa de las siguientesporciones de una esfera maciza y homogénea:a) un segmento esférico de una base, b) unsegmento esférico de dos bases, c) un sectoresférico, d) una hemiesfera (maciza), e) unoctante de esfera (maciza).
16.14.- Calcular la apertura angular de unsector esférico (macizo) cuyo centroide seencuentre justamente en el centro de la super-ficie de conjunción del cono y del segmentoesférico que lo forman.
16.15.- Cascarón esférico. Determinar laposición del centroide de un cascarón hemies-férico de paredes gruesas, siendo R1 y R2 losradios interior y exterior, respectivamente.
16.16.- Porciones de superficie esférica. De-terminar la posición del centroide de lassiguientes porciones de una superficie esférica:a) una zona esférica de una base, b) una zonaesférica de dos bases, c) una luna esférica.
16.17.- Láminas esféricas. Determinar laposición del centro de masa de una láminadelgada y homogénea cuya forma es la de:
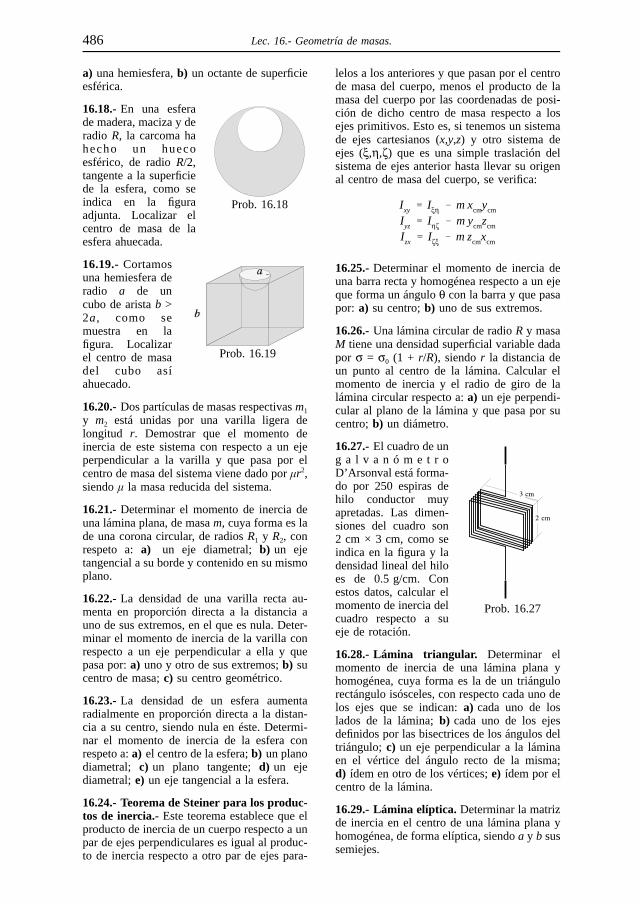
486 Lec. 16.- Geometría de masas.
a) una hemiesfera, b) un octante de superficieesférica.
16.18.- En una esfera
Prob. 16.18
de madera, maciza y deradio R, la carcoma hahecho un huecoesférico, de radio R/2,tangente a la superficiede la esfera, como seindica en la figuraadjunta. Localizar elcentro de masa de laesfera ahuecada.
16.19.- Cortamos
Prob. 16.19
una hemiesfera deradio a de uncubo de arista b >2a , como semuestra en lafigura. Localizarel centro de masadel cubo asíahuecado.
16.20.- Dos partículas de masas respectivas m1
y m2 está unidas por una varilla ligera delongitud r. Demostrar que el momento deinercia de este sistema con respecto a un ejeperpendicular a la varilla y que pasa por elcentro de masa del sistema viene dado por μr2,siendo μ la masa reducida del sistema.
16.21.- Determinar el momento de inercia deuna lámina plana, de masa m, cuya forma es lade una corona circular, de radios R1 y R2, conrespeto a: a) un eje diametral; b) un ejetangencial a su borde y contenido en su mismoplano.
16.22.- La densidad de una varilla recta au-menta en proporción directa a la distancia auno de sus extremos, en el que es nula. Deter-minar el momento de inercia de la varilla conrespecto a un eje perpendicular a ella y quepasa por: a) uno y otro de sus extremos; b) sucentro de masa; c) su centro geométrico.
16.23.- La densidad de un esfera aumentaradialmente en proporción directa a la distan-cia a su centro, siendo nula en éste. Determi-nar el momento de inercia de la esfera conrespeto a: a) el centro de la esfera; b) un planodiametral; c) un plano tangente; d) un ejediametral; e) un eje tangencial a la esfera.
16.24.- Teorema de Steiner para los produc-tos de inercia.- Este teorema establece que elproducto de inercia de un cuerpo respecto a unpar de ejes perpendiculares es igual al produc-to de inercia respecto a otro par de ejes para-
lelos a los anteriores y que pasan por el centrode masa del cuerpo, menos el producto de lamasa del cuerpo por las coordenadas de posi-ción de dicho centro de masa respecto a losejes primitivos. Esto es, si tenemos un sistemade ejes cartesianos (x,y,z) y otro sistema deejes (ξ,η,ζ) que es una simple traslación delsistema de ejes anterior hasta llevar su origenal centro de masa del cuerpo, se verifica:
Ixy Iξη m xcmycm
Iyz Iηζ m ycmzcm
Izx Iζξ m zcmxcm
16.25.- Determinar el momento de inercia deuna barra recta y homogénea respecto a un ejeque forma un ángulo θ con la barra y que pasapor: a) su centro; b) uno de sus extremos.
16.26.- Una lámina circular de radio R y masaM tiene una densidad superficial variable dadapor σ = σ0 (1 + r/R), siendo r la distancia deun punto al centro de la lámina. Calcular elmomento de inercia y el radio de giro de lalámina circular respecto a: a) un eje perpendi-cular al plano de la lámina y que pasa por sucentro; b) un diámetro.
16.27.- El cuadro de un
Prob. 16.27
g a l v a n ó m e t r oD’Arsonval está forma-do por 250 espiras dehilo conductor muyapretadas. Las dimen-siones del cuadro son2 cm × 3 cm, como seindica en la figura y ladensidad lineal del hiloes de 0.5 g/cm. Conestos datos, calcular elmomento de inercia delcuadro respecto a sueje de rotación.
16.28.- Lámina triangular. Determinar elmomento de inercia de una lámina plana yhomogénea, cuya forma es la de un triángulorectángulo isósceles, con respecto cada uno delos ejes que se indican: a) cada uno de loslados de la lámina; b) cada uno de los ejesdefinidos por las bisectrices de los ángulos deltriángulo; c) un eje perpendicular a la láminaen el vértice del ángulo recto de la misma;d) ídem en otro de los vértices; e) ídem por elcentro de la lámina.
16.29.- Lámina elíptica. Determinar la matrizde inercia en el centro de una lámina plana yhomogénea, de forma elíptica, siendo a y b sussemiejes.

Problemas 487
16.30.- Cubo homogéneo. Determinar elmomento de inercia de un cubo homogéneorespecto a cada uno de los ejes siguientes:a) eje que pasa por el centro de dos carasopuestas; b) eje que coincide con una de lasaristas; c) una de las diagonales interiores delcubo.
16.31.- Determinar el momento de inercia deun cono recto circular, macizo y homogéneo,de altura H y radio R, con respecto a: a) uneje perpendicular al eje de simetría en elvértice del cono; b) un diámetro de su base.
16.32.- La barra delgada y homogénea de la
Prob. 16.32
figura pesa 8 kg y está soportada en A y Bmediante soportes de cuenca y bola. a) Deter-minar la matriz de inercia. b) Calcular elmomento de inercia de la barra con respecto aleje de rotación AB. c) Determinar losmomentos y los ejes principales de inercia.
* 16.33.- Consideremos la matriz de inercia
⎛⎜⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎟⎠
12
(A B) 12
(A B) 0
12
(A B) 12
(A B) 0
0 0 C
Efectuemos una rotación del sistema de coor-denadas, girándolo un ángulo arbitrario θalrededor del eje z. a) Evaluar la matriz deinercia en el nuevo sistema de coordenadas.b) Demostrar que la matriz se diagonaliza enA, B y C si elegimos θ=π/4.

488 Lec. 16.- Geometría de masas.
17.- Sistemas de partículas.Leyes de conservación.
§17.1. El problema de los N-Cuerpos (490); §17.2. Cantidad de movimiento (491);§17.3. Conservación de la cantidad de movimiento (493); §17.4. Movimiento del centro demasa (495); §17.5. Sistema de referencia del centro de masa (497); §17.6. Momentoangular (498); §17.7. Conservación del momento angular (503); §17.8. Momentos angularesorbital e interno (505); §17.9. Energía cinética (508); §17.10. Energía potencial (510);§17.11. Conservación de la energía (512); Problemas (515)
Hasta ahora, hemos limitado nuestro estudio de la dinámica al análisis delmovimiento de la partícula, considerada ésta como un punto material. Los conceptosfísicos esenciales relacionados con el movimiento de la partícula están contenidos,según hemos visto, en la segunda ley del movimiento de Newton, que puede serconsiderada como un postulado fundamental o como una definición de fuerza y demasa.
Por otra parte, hemos visto que muchos de los resultados importantes de laMecánica pueden expresarse en forma de teoremas de conservación (de la cantidadde movimiento, del momento angular, de la energía); dichos teoremas establecen lascondiciones en las que varias magnitudes físicas permanecen constantes en eltranscurso del tiempo.
Bajo esos dos puntos de vista hemos discutido la teoría de la dinámica de lapartícula, tratando de ignorar (aunque no siempre haya sido posible) el resto delUniverso; es decir, lo que hemos llamado el medio ambiente o entorno de lapartícula, que hemos representado bien por una fuerza o por una energía potencialque depende tan sólo de las coordenadas de la partícula. El medio ambiente de unapartícula dada está constituido, en último término, por otras partículas. En estalección abordaremos el problema real e interesante de la dinámica de un sistema departículas sujetas a sus interacciones mutuas y a interacciones con otras partículasexteriores al sistema considerado (el medio ambiente del sistema de partículas).
El objetivo de esta lección es generalizar los conceptos de cantidad demovimiento, energía y momento angular, desarrollados en las lecciones anteriorespara una partícula, para un sistema de partículas y mostrar el aspecto que toman loscorrespondientes teoremas, estableciendo las condiciones en las que esos teoremasse convierten en leyes de conservación.
Manuel R. Ortega Girón 489

490 Lec. 17.- Sistemas de partículas. Leyes de conservación.
§17.1. El problema de los N-Cuerpos.- Consideremos un sistema compuestopor N partículas, que numeraremos 1, 2, .. N (Figura 17.1). Designaremos por m1, m2,... las masas de esas partículas, y por r1, r2, ... sus vectores de posición instantáneosrespecto al origen O de un cierto referencial inercial. Los supuestos de partida son:
(a) El sistema de partículas es cerrado1, esto es, ni entra ni sale masa de él,de modo que la masa del sistema
[17.1]mN
i 1mi cte
permanece constante en el transcurso del tiempo
(b) Se cumplen las leyes de la mecánica newtoniana para cada partículaindividual, i.e., si es Fi la fuerza resultante que actúa sobre la partículai-ésima, será
[17.2]mi r i F i
La fuerza resultante que actúa sobre una partícula cualquiera del sistema puedeconsiderarse compuesta de dos partes:
(i) La resultante de todas las fuerzas cuyo origen o agente es exterior alsistema, fuerza que llamaremos externa y designaremos por Fi,ext.
(ii) La resultante de todas las fuerzas provenientes de la interacción de lapartícula dada con las N-1 restantes que constituyen el sistema, fuerza quellamaremos interna y que designaremos por Fi,int.
Si las interacciones entre las
Figura 17.1
partículas se realizan por parejas, laresultante de las fuerzas internas sobrela partícula i-ésima será
[17.3]Fi,int
N
j 1′F ij
donde Fij representa la fuerza que actúasobre la partícula i-ésima debida a suinteracción con la partícula j-ésima. Elsigno (′) tras el símbolo de sumatorionos indica que al extender la suma atodos los valores de j, desde j=1 hasta
j=N, deberemos excluir el valor de j=i, ya que Fii = 0 (de modo que el sumatorioincluye realmente N-1 términos).
1 No deberemos confundir el concepto de sistema cerrado con el de sistema aislado (aquél queno interacciona con el exterior, vide §17.3).

§17.1.- El problema de los N-Cuerpos. 491
La ecuación del movimiento de la partícula i-ésima [17.2] puede escribirse,entonces, en la forma
[17.4]mir i Fi,ext Fi,int
Podemos escribir una ecuación como la anterior para cada una de las partículas delsistema; esto es, tendremos N ecuaciones diferenciales vectoriales de segundo orden:
[17.5]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
m1 r1 F1,ext F1,int
m2 r2 F2,ext F2,int
mN rN FN,ext FN,int
que son las ecuaciones del movimiento del sistema. En realidad, como cada una deestas N ecuaciones es vectorial, tendremos que resolver 3N ecuaciones diferencialesde segundo orden que, en general, están ligadas. La solución de este sistema de ecs.difs. será un conjunto de funciones ri(t), con i = 1, 2, ... N, que describen elmovimiento de cada una de las partículas del sistema. La resolución de este sistemade 3N ecs. difs. de segundo orden hará aparecer 6N constantes "arbitrarias", asociadascon la posición (3 coordenadas por partícula) y la velocidad (3 componentes porpartícula) iniciales de cada una de las partículas.
Aunque la teoría de las ecuaciones diferenciales garantiza la existencia y launicidad de la solución, el problema de resolver analíticamente el sistema de ecs. difs.[17.5] es muy difícil, salvo en ciertos casos particulares. Podemos decir que no existeun método general para resolver analíticamente el problema de los N-cuerpos, inclusocuando se supongan condiciones muy restrictivas acerca del carácter de las fuerzasque se ejercen entre ellos (fuerzas centrales, por ejemplo), o incluso cuando elnúmero N de partículas sea realmente muy pequeño (N = 3, 4, ...). El problema dedos cuerpos, como veremos, puede resolverse a menudo, y se dispone de algunosmétodos y teoremas generales para los casos en que las fuerzas de interacciónsatisfagan determinadas condiciones.
Sin embargo, los métodos numéricos pueden llevarnos a encontrar soluciones bastanteaproximadas del problema de N-cuerpos, incluso para valores de N relativamente elevados; esto hasido posible con el empleo de los potentes medios de cálculo modernos (ordenadores electrónicos).Pero podemos comprender fácilmente que para valores de N muy grandes (comparables al númerode Avogrado, NA = 6.023 × 1023 mol-1), el simple hecho de tener que introducir unas condicionesiniciales (posición y velocidad de cada una de las partículas) resulta ya un problema insalvable; poresta razón, para los llamados sistemas de muchas partículas, en lugar de plantear el problema entérminos de las ecuaciones [17.5], se acude a métodos estadísticos.
Evidentemente, no vamos a intentar aquí la resolución del sistema de ecuaciones[17.5]; nos conformaremos con analizar algunas características generales delmovimiento de un sistema de partículas y con establecer las condiciones bajo las quelos teoremas de la cantidad de movimiento, del momento angular y de la energía seconvierten en las correspondientes leyes de conservación.

492 Lec. 17.- Sistemas de partículas. Leyes de conservación.
§17.2. Cantidad de movimiento.- Dado un sistema de partículas, la cantidadde movimiento de una cualquiera de ellas, en un referencial dado, viene dada por elproducto de su masa por su velocidad; esto es,
[17.6]p i mi v i
La cantidad de movimiento total p del sistema de partículas en un ciertoreferencial se define simplemente como la suma vectorial de las cantidades demovimiento de las partículas individuales en ese mismo referencial; o sea
[17.7]pN
i 1p i
Para establecer el teorema de la cantidad de movimiento para un sistema departículas será conveniente escribir la ecuación del movimiento de la partícula i-ésima[17.4] en la forma2
[17.8]dp idt
Fi,ext Fi,int
Evidentemente, podemos escribir una ecuación análoga para cada una de las Npartículas del sistema. Sumando miembro a miembro todas esas ecuaciones, tenemos
[17.9]N
i 1
dp idt
N
i 1Fi,ext
N
i 1Fi,int
El primer miembro de esta ecuación puede reescribirse en la forma
[17.10]N
i 1
dp idt
ddt
N
i 1p i
dpdt
El primer sumatorio del segundo miembro de [17.9] representa la suma (vectorial)de todas las fuerzas externas que actúan sobre el sistema, o sea, la resultante de lasfuerzas externas, que representaremos por Fext
[17.11]Fext
N
i 1Fi,ext
El segundo sumatorio del segundo miembro de [17.9] representa la suma de todaslas fuerzas internas que actúan sobre las partículas del sistema. Supongamos que lafuerza Fi,int que actúa sobre la partícula i-ésima pueda representarse con la suma defuerzas independientes debidas a la interacción de la partícula i-ésima con las
2 Suponemos que hemos adoptado un cierto referencial inercial a fin de evitarnos la"aparición" de fuerzas de inercia.

§17.2.- Cantidad de movimiento. 493
N-1 partículas restantes [17.3] y que dichas fuerzas cumplan la tercera ley de Newton,al menos en lo que podemos llamar su forma débil3; es decir que
[17.12]F ij F ji
sin que ello implique que esas fuerzas deban estar sobre la recta que une la partículai-ésima con la partícula j-ésima. Bajo estos supuestos, es fácil comprender que lasfuerzas internas al sistema se irán cancelando por parejas (de acción-reacción) demodo que
[17.13]N
i 1Fi,int
N
i 1
N
j 1′ F ij 0
Sustituyendo los resultados [17.10], [17.11] y [17.13] anteriores en [17.9] tenemos unimportante resultado:
[17.14]dpdt
F ext
Esto es:
La rapidez con que cambia la cantidad de movimiento total de un sistemade partículas es igual a la resultante de las fuerzas externas que actúan sobreel sistema.
Este enunciado constituye el teorema de la cantidad de movimiento para unsistema de partículas, que no es más que una generalización de la ecuación delmovimiento de una sola partícula F = dp/dt a un sistema de partículas. El teoremade la cantidad de movimiento establece que
solamente las fuerzas externas al sistema pueden modificar la cantidad demovimiento total del mismo.
Las fuerzas internas al sistema modificarán las cantidades de movimiento individualesde las partículas. Puesto que las fuerzas internas son iguales y opuestas, produciráncambios iguales y opuestos en las cantidades de movimiento de las partículasindividuales, de modo que dichos cambios se compensarán entre sí y no contribuiránal cambio en la cantidad de movimiento total.
§17.3. Conservación de la cantidad de movimiento.- Como consecuenciainmediata del teorema de la cantidad de movimiento se tiene el correspondienteprincipio de conservación.
Si suponemos que la fuerza externa resultante que actúa sobre un sistema departículas es cero, entonces, de acuerdo con la expresión [17.14], tenemos
[17.15]dpdt
0 ⇒ pN
i 1p i cte
3 Algunos autores prefieren la denominación de forma amplia.

494 Lec. 17.- Sistemas de partículas. Leyes de conservación.
Resultado sencillo, pero muy general, que constituye el llamado principio o ley dela conservación de la cantidad de movimiento:
Cuando la resultante de las fuerzas externas que actúan sobre un sistema departículas es nula, la cantidad de movimiento total del sistema permanececonstante
La condición de que la resultante de las fuerzas externas que actúan sobre elsistema sea nula puede sustituirse por la ausencia de interacción del sistema con elresto del universo. En este caso preferimos referirnos al sistema como a un sistemaaislado, esto es, que no intercambia cantidad de movimiento (ni energía) con elexterior. Enunciamos entonces el anterior principio diciendo que
La cantidad de movimiento total de un sistema de partículas aisladopermanece constante en el transcurso del tiempo.
Aunque resulte reiterativo, debemos insistir en que tan sólo la cantidad demovimiento total p se mantiene constante en ausencia de fuerzas externas al sistemao cuando sea nula la resultante de éstas. En general, las cantidades de movimientode las partículas individuales no permanecerán constantes en el transcurso del tiempo,ya que las partículas intercambian cantidad de movimiento (y energía) entre ellas. Enefecto, la rapidez del cambio de pi (esto es, dpi/dt) será igual a la resultante de lasfuerzas internas (y externas, en su caso) que actúan sobre la partícula i-ésima, queno tiene por que ser necesariamente nula.
Debemos subrayar el papel clave que ha
Figura 17.2
jugado la tercera ley de Newton (en su formadébil) en la deducción de la ley de la conserva-ción de la cantidad de movimiento. Sin embar-go, la hipótesis de que las fuerzas de interacciónentre dos partículas sean newtonianas nosiempre se satisfacen de un modo exacto. Enrealidad, como ya indicábamos en el artículo§7.11, la interacción entre dos partículas nopuede ser instantánea, porque la interacción nose propaga con velocidad infinita, sino con lavelocidad de la luz como máximo. Las fuerzas
gravitatorias y electrostáticas (entre cargas en reposo) satisfacen la tercera ley deNewton; pero cuando las partículas, que son portadoras de masa gravitatoria y decarga eléctrica (eventualmente) se encuentran en movimiento, al propagarse la inte-racción con una velocidad finita, las fuerzas entre ellas pueden no ser en cualquierinstante iguales y opuestas. Así, cuando un electrón rápido pasa frente a un protónen reposo, el protón "ve" siempre al electrón, en cualquier instante, un poco atrás desu posición real, y la fuerza sobre el protón estará determinada no por la posiciónreal del electrón sino por la que tenía un instante anterior.
A pesar de ello, la ley de la conservación de la cantidad de movimiento siguesiendo válida aun cuando las fuerzas de interacción entre las partículas del sistema(fuerzas internas al sistema) no satisfagan rigurosamente la tercera ley de Newton (ensu forma débil); por consiguiente, esta ley debe ser más fundamental que la tercera

§17.3.- Conservación de la cantidad de movimiento. 495
ley de Newton. Es obvio que resulta poco satisfactorio basar la deducción de esta leyde conservación en la hipótesis de fuerza newtonianas.
En realidad, al establecer que la suma de todas las fuerzas internas al sistema es igual a cero[17.13] hemos hecho unas suposiciones más restrictivas de lo necesario sobre el carácter de dichasfuerzas. Podemos llegar al mismo resultado [17.13] sin hacer mención alguna a la tercera ley deNewton; ni tan siquiera es preciso admitir que las partículas del sistema interactúen por parejas.Bastará suponer únicamente que las fuerzas internas sean tales que no se realice trabajo neto algunosi todas y cada una de las partículas del sistema experimentasen un mismo desplazamiento virtual4
δr a partir de su posición en un instante dado cualquiera. Esta suposición equivale a admitir que,desde el punto de vista general de la conservación de la energía, el espacio es homogéneo. Simovemos el sistema en conjunto desde su posición actual hasta otra posición ligeramente des-plazada en el espacio, sin alterarlo en nada más (misma estructura interna, mismas velocidades delas partículas individuales, ...), la distribución de los diversos tipo de energías (potencial y cinética)en él no habrán podido realizar trabajo neto. Evidentemente, descartamos la existencia de campos(fuerzas) externos al sistema.
El trabajo realizado por la fuerza Fi,int en el desplazamiento virtual elemental δr es
Figura 17.3
[17.16]δWi Fi,int δr
de modo que el trabajo neto realizado por todas lasfuerzas interiores es
[17.17]δWN
i 1δWi (
N
i 1Fi,int ) δr
donde hemos sacado δr como factor común, por serel mismo para todas las partículas. Puesto quehemos supuesto que δW = 0, tendremos
[17.18](N
i 1Fi, int ) δr 0
relación debe verificarse para cualquier desplazamiento virtual elemental, de modo que será
[17.19]N
i 1Fi, int 0
§17.4. Movimiento del centro de masa.- El teorema de la cantidad de movi-miento [17.14] y el principio de conservación de la cantidad de movimiento [17.15] ad-quieren una forma más expresiva cuando se introduce el concepto de centro de masade un sistema de partículas.
En la lección anterior, hemos definido el centro de masa de un sistema de partí-culas, como el punto del espacio cuyo vector posición es
[17.20]r cm
N
i 1mi r iN
i 1mi
4 El concepto de desplazamiento virtual será definido y desarrollado en §20.10.
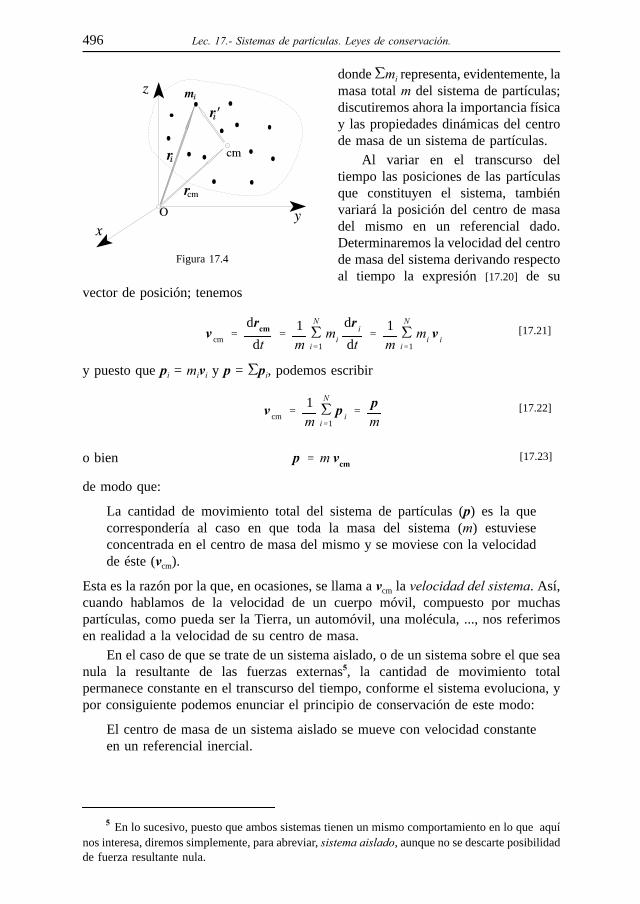
496 Lec. 17.- Sistemas de partículas. Leyes de conservación.
donde mi representa, evidentemente, la
Figura 17.4
masa total m del sistema de partículas;discutiremos ahora la importancia físicay las propiedades dinámicas del centrode masa de un sistema de partículas.
Al variar en el transcurso deltiempo las posiciones de las partículasque constituyen el sistema, tambiénvariará la posición del centro de masadel mismo en un referencial dado.Determinaremos la velocidad del centrode masa del sistema derivando respectoal tiempo la expresión [17.20] de su
vector de posición; tenemos
[17.21]v cm
drcmdt
1m
N
i 1mi
dr idt
1m
N
i 1mi v i
y puesto que pi = mivi y p = pi, podemos escribir
[17.22]v cm
1m
N
i 1p i
pm
o bien [17.23]p m vcm
de modo que:
La cantidad de movimiento total del sistema de partículas (p) es la quecorrespondería al caso en que toda la masa del sistema (m) estuvieseconcentrada en el centro de masa del mismo y se moviese con la velocidadde éste (vcm).
Esta es la razón por la que, en ocasiones, se llama a vcm la velocidad del sistema. Así,cuando hablamos de la velocidad de un cuerpo móvil, compuesto por muchaspartículas, como pueda ser la Tierra, un automóvil, una molécula, ..., nos referimosen realidad a la velocidad de su centro de masa.
En el caso de que se trate de un sistema aislado, o de un sistema sobre el que seanula la resultante de las fuerzas externas5, la cantidad de movimiento totalpermanece constante en el transcurso del tiempo, conforme el sistema evoluciona, ypor consiguiente podemos enunciar el principio de conservación de este modo:
El centro de masa de un sistema aislado se mueve con velocidad constanteen un referencial inercial.
5 En lo sucesivo, puesto que ambos sistemas tienen un mismo comportamiento en lo que aquínos interesa, diremos simplemente, para abreviar, sistema aislado, aunque no se descarte posibilidadde fuerza resultante nula.

§17.4.- Movimiento del centro de masa. 497
Si no se tratase de un sistema aislado, esto es, si tuviésemos una fuerza resultanteexterna no nula, podemos determinar la aceleración del centro de masa derivando laexpresión [17.23] con respecto al tiempo; tenemos
[17.24]dpdt
mdvcmdt
m acm
de modo que, de acuerdo con el teorema de la cantidad de movimiento [17.14],podemos escribir
[17.25]Fext m acm
Esta ecuación tiene la misma forma que la ecuación del movimiento de una partículade masa m sobre la que actúa una fuerza Fext (en el caso de una partícula, carece designificado hacer la distinción "externa" al referirnos a la fuerza que actúa sobre ella).En definitiva, podemos interpretar la expresión [17.25] del siguiente modo:
El centro de masa de un sistema de partículas se mueve como lo haría unapartícula, cuya masa fuese la masa total del sistema, sometida a una fuerzaigual a la resultante de las fuerzas externas que actúan sobre el sistema.
Debemos resaltar que los resultados anteriores son aplicables a cualquier sistemade partículas, sin especificar su naturaleza. Así, el sistema puede consistir en unconjunto de partículas en el que sean posibles todo tipo de movimientos internos;pero también puede tratarse de un sólido rígido en el que las partículas se encontraránen posiciones fijas las unas con relación a las otras. Cualquiera que sea el sistema,y como quiera que se muevan las partículas que lo constituyen, unas con relación aotras, el centro de masa del sistema se moverá de acuerdo con [17.25]. Siempre habráun punto, llamado centro de masa, que se moverá como lo haría una partícula demasa m (= mi) sometida a la resultante de las mismas fuerzas externas.
Por otra parte, debemos reparar en que si todas las partículas del sistemaexperimentan los mismos desplazamientos que el centro de masa, lo que equivale adecir que tienen la misma velocidad que éste, entonces el movimiento del sistema esuna traslación pura; por esta razón, el movimiento del centro de masa suele recibirel nombre de movimiento de traslación del sistema. Veremos más adelante como esteresultado simplifica el análisis del movimiento general de un sistema de partículas(y, como caso particular, el del sólido rígido), pues siempre será posible descomponerdicho movimiento en dos partes: el movimiento del centro de masa (traslación) y elmovimiento interno del sistema, esto es, el movimiento de las partículas del sistemarespecto a su centro de masa (rotación, en el caso del sólido rígido).
§17.5. Sistema de referencia del centro de masa.- Para proceder con co-modidad a la separación del movimiento del sistema de partículas en las dos partesanteriormente citadas es conveniente definir un referencial cuyo origen se encuentreen el centro de masa del sistema de partículas y cuyos ejes mantengan unaorientación fija respecto a un referencial inercial (SI); tal referencial recibe el nombrede sistema del centro de masa (SCM). Si el centro de masa se mueve con velocidadconstante respecto a un referencial inercial (sistema aislado), el SCM constituye a suvez un referencial inercial; en caso contrario, el SCM no será inercial. No obstante,

498 Lec. 17.- Sistemas de partículas. Leyes de conservación.
incluso en este segundo caso, al permanecer fija la orientación del SCM respecto alSI, es
Figura 17.5
[17.26]d dt I
d dt CM
Definiremos el vector de posicióninterno ri′ de la partícula i-ésima como elvector de origen en el centro de masa y deextremo en dicha partícula (Figura 17.5).Esto es,
[17.27]r i′ r i rcm
Así, de acuerdo con la definición[17.20] del centro de masa, las coordenadasinternas ri′ (i = 1, 2, ... N) de las partículassatisfacen la relación
[17.28]N
i 1mi r i′ 0
ya que el sumatorio [17.28], dividido por la masa total m, representa la posición delcentro de masa en un referencial cuyo origen es precisamente dicho centro de masa.
La velocidad y la cantidad de movimiento internas de la partícula i-ésima son
[17.29]v i′ v i vcm p i′ mi v i′
de modo que la cantidad de movimiento total del sistema de partículas en el SCM,o sea la cantidad de movimiento total interna es siempre igual a cero
[17.30]N
i 1p i′
N
i 1mi v i′ 0
como se deduce inmediatamente de [17.28] por derivación. Este último hecho es larazón profunda de la importancia dinámica del centro de masa y el motivo de suelección del modo que se hizo en [17.20].
La cantidad de movimiento interna de un sistema de partículas (aisladas ono) es siempre nula.
§17.6. Momento angular.- Recordemos que el momento angular de unapartícula respecto a un punto fijo en un referencial fue definido (§12.2) como el mo-mento de la cantidad de movimiento de la partícula respecto a dicho punto, o sea
[17.31]L r × p mr × v
y que dicho momento angular depende del punto elegido para calcularlo.En el caso de un sistema de partículas, será conveniente, para no perder genera-
lidad, calcular el momento angular de cada una de las partículas respecto a un punto

§17.6.- Momento angular. 499
cualquiera Q, que no precisa ser el origen del referencial ni encontrarse fijo en dichoreferencial. Definiremos el momento angular de la partícula i-ésima del sistemarespecto a dicho punto Q en la forma
[17.32]Li,Q mi(r i rQ) × (r i rQ)
donde rQ es el vector de posición del punto
Figura 17.6
Q y ri-rQ es el vector de posición de lapartícula i-ésima respecto al punto Q.Obsérvese que hemos utilizado la veloci-dad relativa de la partícula i-ési-(r i rQ)ma respecto a Q, por lo que Li,Q es el mo-mento angular de dicha partícula calculadocomo si el punto Q fuese un origen (demomentos) fijo. Este es el modo máshabitual6 de definir el momento angularrespecto a un punto móvil, aunque no es elúnico7.
El momento angular total LQ del sistema de partículas respecto al punto Q sedefine simplemente como la suma vectorial de los momentos angulares de las partícu-las individuales respecto a ese mismo punto, o sea
[17.33]LQN
i 1Li,Q
N
i 1mi (r i rQ) × (r i rQ)
A fin de establecer el teorema del momento angular para un sistema departículas, necesitaremos calcular la derivada temporal del momento angular total.Comenzamos por derivar la expresión [17.32] para una sola partícula, esto es
[17.34]dLi,Q
dtmi(r i rQ) × (r i rQ) mi(r i rQ) × (r i rQ)
comprendiéndose fácilmente que el primer término del segundo miembro es nulo.Desarrollando el último término, se tiene
[17.35]dLi,Q
dtmi(r i rQ) × r i mi(r i rQ) × rQ
de modo que teniendo en cuenta que obtenemos finalmentemir i Fi,ext Fi,int
6 Esta elección del punto Q tiene más interés que el puramente académico. En efecto, en ungran número de problemas asociados con el movimiento del sólido rígido resultará convenientetomar momentos con respecto a algún punto del sólido que, en general, al moverse con éste, no seráestacionario.
7 Algunos autores prefieren poner Li,Q = mi (ri - rQ) × vi.

500 Lec. 17.- Sistemas de partículas. Leyes de conservación.
[17.36]dLi,Q
dt(r i rQ) × Fi,ext (r i rQ) × Fi,int mi(r i rQ) × rQ
resultando que el cambio por unidad de tiempo del momento angular de la partículai-ésima está determinado por el momento de todas las fuerzas que actúan sobre ella,tanto de origen externo como interno al sistema de partículas.
Evidentemente, podemos escribir una ecuación como la anterior para cada unade las N partículas que constituyen el sistema; sumándolas miembro a miembro todasellas, tenemos
[17.37]N
i 1
dLi,Qdt
N
i 1(r i rQ) × Fi,ext
N
i 1(r i rQ) × Fi,int [
N
i 1mi(r i rQ)] × rQ
El primer miembro de esta ecuación puede escribirse en la forma
[17.38]N
i 1
dLi,Qdt
ddt
N
i 1Li,Q
dLQdt
que es la derivada temporal del momento angular total.El primer sumatorio del segundo miembro de [17.37] representa el momento
resultante, respecto al punto Q, debido a las fuerzas externas que actúan sobre laspartículas del sistema. Lo llamaremos momento externo total, respecto al punto Q,y lo representaremos por MQ,ext:
[17.39]MQ,ext
N
i 1(r i rQ) × Fi,ext
El segundo sumatorio del segundo miembro de [17.37] representa el momentoresultante, respecto al punto Q, debido a las fuerzas internas que actúan sobre laspartículas. Lo llamaremos momento interno total, i.e.,
[17.40]MQ,int
N
i 1(r i rQ) × Fi, int
y será nulo si las fuerzas internas cumplen la tercera ley de Newton.En efecto, admitamos ahora, al igual que hicimos en §17.2, que las partículas del sistema
interactúan entre sí por parejas, de modo que la fuerza resultante Fi,int pueda considerarse como lasuma de (N-1) fuerzas debidas a las interacciones de la partícula i-ésima con cada una de las (N-1)restantes partículas del sistema; entonces
[17.41]Fi, int
N
j 1′ Fij
de modo que podemos escribir
[17.42]MQ,int
N
i 1(r i rQ) ×
N
j 1′ F ij
N
i 1
N
j 1′(r i rQ) × Fij
Pero, intercambiando los subíndices mudos (i,j), tenemos

§17.6.- Momento angular. 501
[17.43]N
i 1
N
j 1′(r i rQ) × Fij
N
j 1
N
i 1′(r j rQ) × Fji
de modo que
[17.44]MQ,int12
N N
i≠j[(r i rQ) × Fij (r j rQ) × Fji]
Supongamos ahora que las fuerzas internas del sistema cumplan la tercera ley de Newton ensu forma fuerte8; es decir, las fuerzas Fij y Fji, entre las partículas i y j, no sólo serán iguales yopuestas, sino que además actuarán a lo largo de la recta que une las dos partículas. Esta condiciónequivale a decir que las fuerzas son centrales y que sólo son posibles las atracciones o repulsionespuras entre cada pareja de partículas; esta condición puede expresarse como
[17.45](r i r j) × Fij 0
En estos supuestos, la expresión [17.44] del momento interno total nos conduce a
MQ,int12
N N
i≠j[(r i rQ) × Fij (r j rQ) × Fij]
[17.46]12
N N
i≠j[(r i r j) × Fij] 0
de modo que el momento interno total es nulo.
El tercer sumatorio de la expresión [17.37] puede desarrollarse así:
[17.47][N
i 1mi (r i rQ)] × rQ [
N
i 1mi r i (
N
i 1mi) rQ] × rQ
[mrcm mrQ] × rQ m (rQ rcm) × rQ mrQ,cm × rQ
y será nulo si:
a) el punto Q coincide con el centro de masa del sistema (esté acelerado o no).
b) el punto Q no está acelerado en el referencial inercial.
c) la aceleración del punto Q es paralela a rQ,cm; i.e., su línea de acción pasapor el centro de masa del sistema.
Las aplicaciones más sencillas e interesantes corresponden a los dos primeroscasos. Limitaremos nuestra discusión a los casos en que
[17.48][N
i 1mi(r i rQ)] × rQ m rQ,cm × rQ 0
Finalmente, sustituyendo los resultados anteriores en [17.37], obtenemos unresultado importante:
8 También llamada forma restringida o estricta.

502 Lec. 17.- Sistemas de partículas. Leyes de conservación.
[17.49]dLQ
dtMQ,ext
Esto es:
La rapidez con que cambia el momento angular de un sistema de partículas,respecto a un punto arbitrario (que cumpla ciertas condiciones), es igual almomento externo total respecto a ese mismo punto.Este enunciado constituye el teorema del momento angular para un sistema de
partículas, y no es más que una generalización de la expresión dL/dt = M, para unapartícula, a un sistema de partículas. El teorema del momento angular establece quesolamente las fuerzas externas (mejor, su momento) pueden modificar el momentoangular total de un sistema de partículas. Las fuerzas internas al sistema podránmodificar los momentos angulares individuales de las partículas, pero dichos cambiosse compensarán de tal modo que no contribuirán al cambio en el momento angulartotal del sistema.
Aunque pudiera parecer reiterativo, conviene insistir en las condiciones en lasque es válida la expresión [17.49]. Tanto el momento angular como el momento de lasfuerzas externas deberán estar referidos a un mismo punto que deberá satisfaceralguna de las tres condiciones requeridas para la anulación del último sumatorio de[17.37]; estos requisitos serán fáciles de satisfacer. Además, las fuerzas internas alsistema deberán presentarse como fuerzas de interacción entre pares de partículas ycumplir la tercera ley de Newton en su forma fuerte; estos últimos requisitos puedenser más difíciles de satisfacer (pensemos en las fuerzas electromagnéticas entre cargaseléctricas en movimiento).
Ejemplo I.- Péndulo simple en un ascensor.- Consideremos un péndulo simple suspendido del
Figura 17.7
techo de un ascensor. Determinar la frecuencia de las pequeñas oscilacionesde la masa pendular en las dos situaciones siguientes: a) El ascensor está enreposo o se mueve con velocidad constante; b) el ascensor esta acelerandoen su movimiento ascendente.
a) Tomaremos momentos con respecto al punto O (no acelerado) de modoque obtenemos9
mgl sen θ ml 2θ
y para pequeñas oscilaciones ponemos senθ ≈ θ,
de modo que θ gl
θ 0
por lo que la frecuencia de las pequeñas oscilaciones será
9 El segundo miembro de la expresión siguiente es , con IO=ml2, como veremosdLO
dtIOθ
en una Lección posterior, aunque suponemos que el lector ya conoce esta expresión de la FísicaElemental.

§17.6.- Momento angular. 503
ω0
gl
b) Obsérvese que ahora el punto O tiene una aceleración aO (la misma que posee el ascensor) porlo que además de los momentos de las fuerzas que actúan sobre la masa pendular tendremos queañadir el tercer término de la expresión [17.37], desarrollado en [17.47]; i.e.,
mrO,cm × rO m PO × aO
cuyo módulo es , de modo que la ec. dif. del movimiento serámlaO sen θ
mlg senθ mlaO senθ ml (g aO) senθ ml 2θ
que, para pequeñas oscilaciones, se convierte en
Figura 17.8
θg aO
lθ 0
por lo que la frecuencia angular de las mismas será
ω0
g aO
l
NOTA: Naturalmente, podemos llegar al mismo resultado, de una forma más inmediata, resolviendoel problema como lo hicimos en la Lec. 13, sin más que considerar la fuerza de inercia (-maO)sobre la masa pendular. Sirva el desarrollo anterior para ilustrar la "inconveniencia" de tomar un"punto acelerado" como origen de momentos.
§17.7. Conservación del momento angular.- Como consecuencia inmediatadel teorema del momento angular, y en las condiciones de validez del mismo, setiene la correspondiente ley de conservación.
Si sobre un sistema de partículas no actúa fuerza externa alguna (sistemaaislado), o si el momento resultante de las fuerzas externas actuantes es cero,entonces, de acuerdo con la expresión [17.49], tenemos
[17.50]dLQdt
0 ⇒ LQ cte
esto es, el momento angular total se mantiene constante en el transcurso del tiempo.Obsérvese que, siendo constante el momento angular respecto al punto Q, tambiénlo será con respecto a cualquier otro punto. El resultado anterior constituye elprincipio o ley de la conservación del momento angular:
El momento angular total de un sistema aislado, o de un sistema sobre elque actúa un momento externo total nulo, permanece constante en eltranscurso del tiempo.

504 Lec. 17.- Sistemas de partículas. Leyes de conservación.
De nuevo hemos de insistir en que tan sólo el momento angular total se mantieneconstante en ausencia de momento externo. En general, el momento angular de cadauna de las partículas del sistema no permanecerá constante. La rapidez con quecambia el momento angular de la partícula i-ésima, dLi,Q/dt, será igual al momentoresultante de las fuerzas externas e internas que actúan sobre ella, (ri - rQ) × Fi, queno tiene por que ser necesariamente nulo.
El principio de conservación del momento angular es aplicable tanto en lasregiones celestes y macroscópicas como en la Física Atómica y Nuclear aun cuandola Mecánica Newtoniana o Clásica no sea aplicable en estos últimos campos. Enrealidad, el principio de conservación del momento angular, al igual que el de lacantidad de movimiento, es mucho más fundamental que los principios newtonianos.Al establecer el principio de conservación del momento angular, la tercera ley deNewton, en su forma fuerte, ha jugado un papel decisivo. Pero no siempre se satis-face exactamente la hipótesis de que las fuerzas de interacción entre las partículas delsistema sean newtonianas, esto es, que aparezcan como parejas de acción-reaccióntales que Fij = - Fji (la forma débil de la tercera ley de Newton) y que esténcontenidas en la recta que une las dos partículas que interaccionan (la forma fuertede dicha ley). Como es sabido, la forma fuerte de la tercera ley de Newton quedaviolada en las interacciones electromagnéticas. Resulta poco satisfactorio basar laconservación del momento angular, que es de carácter más fundamental que la terceraley de Newton, en la suposición de que se cumpla dicha ley.
En realidad, al demostrar que el momento interno total es nulo, hemos hecho unas hipótesis(forma fuerte de la tercera ley) más restrictivas de lo que realmente era necesario. Podemosdemostrar que el momento interno total es cero sin hacer mención alguna a la tercera ley deNewton; ni tan siquiera necesitamos admitir que las partículas del sistema interactúen por parejas.Bastará suponer únicamente que las fuerzas internas sean tales que no realicen trabajo virtual netoen una rotación virtual δθ alrededor de cualquier eje que pase por el punto Q. Desde el punto devista de la conservación de la energía, esta suposición equivale a admitir que el espacio es isótropo,en ausencia de campos exteriores.
El trabajo virtual realizado por la fuerza Fi,int en la rotación virtual elemental δθ es10
[17.51]δWi δθ [(r i rQ) × Fi,int ]
de modo que el trabajo virtual neto realizado por todas las fuerzas interiores es
[17.52]δWN
i 1δWi δθ
N
i 1[(r i rQ) × Fi,int ]
y puesto que hemos supuesto que δW = 0, tendremos
[17.53]δθN
i 1[(r i rQ) × Fi, int ] 0
y como esta relación deberá verificarse para cualquier rotación virtual elemental, deberá ser
[17.54]MQ,int
N
i 1[(r i rQ) × Fi,int ] 0
10 Más adelante (vide §22.5) demostraremos esta expresión del trabajo realizado por el momen-to aplicado en una rotación elemental.

§17.8.- Momentos angulares orbital e interno. 505
§17.8. Momentos angulares orbital e interno.- Hemos dicho anteriormenteque siempre es posible separar en dos partes bien diferenciadas el movimiento de unsistema de partículas: el movimiento del centro de masa y el movimiento interno delsistema, esto es, el movimiento de las partículas del sistema respecto a su centro demasa. En el caso de la cantidad de movimiento, ya hemos visto que la cantidad demovimiento interna total del sistema es nula. Veamos, ahora, como se descomponeel momento angular total.
Si ri y vi son el vector de posición y la velocidad de la partícula i-ésima respectoal origen de un referencial dado, y ri′ y vi′ son el vector de posición y la velocidadde dicha partícula respecto al centro de masa del sistema (vectores de posición y develocidad internos, Figura 17.5), tenemos las relaciones siguientes:
[17.55]r i r i′ rcm ⇒ v i v i′ vcm
El momento angular total respecto a un punto Q viene dado por
[17.56]LQ
N
i 1mi (r i rQ) × (v i vQ)
entonces, sustituyendo las relaciones [17.55] en esta expresión, tenemos
[17.57]
LQN
i 1mi (r i′ rcm rQ) × (v i′ vcm vQ)
N
i 1mi (r i′ rcm,Q) × (v i′ vcm,Q)
N
i 1mi r i′ × v i′ [
N
i 1mi] rcm,Q × vcm,Q [
N
i 1mi r i′] × vcm,Q rcm,Q × [
N
i 1mi v i′]
donde rcm,Q y vcm,Q representan el vector de posición y la velocidad del centro de masarespecto al punto Q. Los dos últimos términos de la expresión anterior son, evidente-mente nulos: el tercero contiene un sumatorio que representa la posición del centrode masa en el referencial del centro de masa; el cuarto contiene un sumatorio querepresenta la cantidad de movimiento total en el sistema del centro de masa. Endefinitiva, tenemos
[17.58]LQN
i 1mi r i′ × v i′ m rcm,Q × vcm,Q
Los dos términos en que se separa el momento angular total LQ tienen unainterpretación fácil e interesante.
Tenemos, por una parte11
11 El subíndice Q, que afecta a la cantidad de movimiento total, nos indica que esa cantidadde movimiento está referida a un referencial que tiene el punto Q como origen, pero que mantiene
(continúa...)

506 Lec. 17.- Sistemas de partículas. Leyes de conservación.
[17.59]Lorb rcm,Q × mvcm,Q rcm,Q × pQ
que es el momento angular de una partícula que tuviera la masa total del sistema yestuviera en el centro de masa, moviéndose con la velocidad de éste. A esta parte delmovimiento angular total, asociada con el movimiento del centro de masa, se le llamamomento angular orbital o externo.
Por otra parte, el primer término del segundo miembro de [17.58] representa elmomento angular total del sistema de partículas respecto a su centro de masa y recibeel nombre de momento angular interno total.
Obsérvese que el momento angular orbital depende del punto Q respecto al quelo calculamos; en cambio el momento angular interno sólo depende de lascoordenadas y velocidades internas y es independiente del punto Q respecto al quese calcula LQ. En este sentido, el momento angular interno tiene carácter intrínseco,de ahí que se le llame, también, momento angular intrínseco.
Hemos visto que es posible separar el momento angular total de un sistema departículas en dos partes: un momento angular orbital o externo, respecto a un puntoQ, asociado con el movimiento del centro de masa respecto a dicho punto, y unmomento angular interno o intrínseco, asociado con el movimiento del sistemarespecto al centro de masa del mismo. Considerado el sistema desde el exterior, esasimilable a una sola partícula, de masa m y situada en el CM del sistema, sobre laque actúa una fuerza externa Fext, pero que aparte de su momento angular orbital (yde su cantidad de movimiento), tiene un momento angular interno intrínseco asociadocon su movimiento interno. En muchos procesos, estamos interesados principalmentepor el movimiento interno; por eso preferimos el uso del referencial del centro demasa (SCM) para describirlos (v.g., procesos de colisión).
La existencia de un momento angular interno pone de manifiesto la estructura interna delsistema y, en este sentido es un test que nos permite descubrirla en aquellos casos en los que, porejemplo, el sistema tiene unas dimensiones tan pequeñas (a la escala del problema) que estamostentados a considerarlo como una partícula. Pero si al estudiar su momento angular respecto a unpunto Q encontramos algo más que (r - rQ) × pQ, deberemos entender que no se trata de unapartícula (en el sentido en que usamos este término en la Mecánica Clásica), sino de un sistemamás complejo. Esta situación se nos presenta en la Física Atómica y Nuclear, cuando encontramosque las partículas elementales (tales como electrones, protones, neutrones, neutrinos, ...) tienen unmomento angular intrínseco (llamado spin) debido a "algún movimiento de rotación intrínseco",además de un momento angular orbital. ¿Son realmente partículas tales partículas elementales?
Una característica fundamental de los sistemas atómicos, nucleares y de las partículaselementales es que el momento angular orbital y el spin están cuantificados, esto es, que sólopueden tomar valores discretos definidos, múltiplos de un momento angular "elemental" querepresentamos por
[17.60]h2π
1.0542 × 10 34 J s
11(...continuación)invariable su orientación en el espacio (i.e., en traslación pura). Naturalmente, si el punto Q estáen reposo en un referencial dado, será pQ = p; i.e., la cantidad de movimiento del sistema departículas en dicho referencial.

§17.8.- Momentos angulares orbital e interno. 507
donde es la constante de Planck. Así, el momento angular orbital del electrón en el átomo de
hidrógeno, sólo puede tomar los valores donde l (número cuántico orbital) toma losl(l 1)valores enteros 0, 1, 2, n-1, (n es el número cuántico principal, que da lugar a la cuantificaciónde los valores de la energía). Por otra parte, el momento angular interno o spin del electrón vale
/2.
La expresión [17.49] del teorema del momento angular es correcta para cualquierpunto Q, respecto al que calculamos el momento angular y el momento de lasfuerzas, con tal que dicho punto satisfaga alguna de las tres condiciones enunciadasen el §17.6. Así pues, si el punto Q coincide con el centro de masa del sistema,designando por Lcm el momento angular interno, tenemos
[17.61]dLcm
dtMcm,ext
Ya hemos visto que el movimiento del centro de masa está determinado por lafuerza total externa que actúa sobre el sistema. Ahora encontramos que elmovimiento interno del sistema está determinado por el momento externo resultanterespecto al centro de masa. Así pues, si dicho momento externo resultante es nulo(Mcm,ext = 0) el momento angular interno del sistema se conservará constante. Esta esla razón por la que la Tierra se mantiene en rotación con una velocidad angularesencialmente constante alrededor de su eje de rotación, ya que el momentoresultante, respecto a su centro de masa, de las fuerzas ejercidas sobre ella por el Sol,la Luna y los otros planetas es nulo (puesto que esas fuerzas pasan por el centro demasa de la Tierra).
La ley de la conservación
Figura 17.9
del momento angular es válidatal como la hemos formuladoen el artículo anterior (recuér-dense las restricciones acercade la elección del punto Q)para un sistema de cuerpossiempre que estos puedanconsiderarse como partículas,esto es, siempre que podamospasar por alto las rotacionesintrínsecas de estos cuerposconsiderados individualmente. Cuando tales cuerpos presentan rotaciones sobre símismos, el principio de conservación del momento angular seguirá siendo válido, contal que incluyamos los momentos angulares debidos a esas rotaciones en la evalua-ción del momento angular total del sistema de cuerpos. Así, si consideramos elsistema solar, nos encontraremos con que los cuerpos que lo forman tienen momentosangulares intrínsecos que deben incluirse en el momento angular total para que éstepermanezca constante. La conservación del momento angular total juega un papelclave en la valoración de las teorías acerca de la formación del sistema solar, de laevolución de las estrellas y de otros importantes problemas de la Astrofísica.

508 Lec. 17.- Sistemas de partículas. Leyes de conservación.
§17.9. Energía cinética.- Consideremos, de nuevo, un sistema de partículas,en el que cada una de las partículas está sometida a una fuerza que consta de unaparte externa, Fi,ext, y otra parte interna, Fi,int, como ya hemos explicado anteriormen-te. En un instante dado, t, cada partícula del sistema ocupa una cierta posición,definida por su vector de posición ri respecto al origen de un referencial inercialdado, y se mueve con una velocidad vi respecto a dicho referencial. En un intervalode tiempo infinitesimal, dt, cada partícula del sistema experimentará un desplaza-miento infinitesimal dri, tangente a su trayectoria. Durante ese desplazamiento infini-tesimal, el trabajo elemental realizado sobre la partícula i-ésima del sistema es
[17.62]dWi F i dr i Fi,ext dr i Fi,int dr i
que, en virtud del teorema de la energía cinética (o de las fuerzas vivas), podemosigualar con el cambio elemental experimentado por la energía cinética de la partícula;
[17.63]dWi d ⎛⎜⎝
⎞⎟⎠
12miv
2i
Evidentemente, podemos escribir una expresión como la anterior para cada una delas N partículas del sistema; sumándolas miembro a miembro, tenemos
[17.64]dW
N
i 1Fi,ext dr i
N
i 1Fi,int dr i d
⎛⎜⎜⎝
⎞⎟⎟⎠
N
i 1
12mi v
2i
Los dos sumatorios del primer miembro de esta igualdad representan, respectiva-
Figura 17.10
mente, el trabajo elemental realizado por las fuerzas externas y por las fuerzasinternas12 al sistema; esto es
[17.65]dWext
N
i 1Fi,ext dr i
dWint
N
i 1Fi,int dr i
Análogamente a como hicimos para lacantidad de movimiento y el momentoangular, definimos la energía cinética totalde un sistema de partículas como la sumade las energías cinéticas de las partículasindividuales; es decir
[17.66]Ek
N
i 1
1
2mi v
2i
12 En general, el trabajo interno no será nulo. El sólido rígido constituye un caso especial enel que las condiciones de rigidez permiten asegurar que el trabajo interno será nulo en cualquiermovimiento del sistema.

§17.9.- Energía cinética. 509
Entonces, con esta definición y las expresiones [17.65], podemos escribir la igualdad[17.64] en la forma
[17.67]dW dWext dWint dEk
resultado que constituye la extensión natural del teorema de la energía cinética paraun sistema de partículas, y que podemos enunciar diciendo que
el cambio en la energía cinética (total) de un sistema de partículas es igualal trabajo realizado sobre el mismo por las fuerzas externas e internas.Existe una diferencia destacada entre los teoremas concernientes a la cantidad de
movimiento, al momento angular y a la energía cinética. En los teoremas de lacantidad de movimiento y del momento angular no intervienen las fuerzas internas,al menos si éstas cumplen ciertas condiciones (fuerzas newtonianas). En cambio, enel caso de la energía cinética, no podemos asegurar que, en general, el trabajorealizado por las fuerzas internas sea nulo, aun cuando estas fuerzas internas seannewtonianas.
El valor de la energía cinética del sistema de partículas depende del referencialque utilicemos; la energía cinética referida al centro de masa del sistema (SCM)recibe el nombre de energía cinética interna del sistema. La energía cinética total delsistema de partículas, dada por [17.66], puede expresarse en función de la velocidaddel centro de masa y de las velocidades internas; sin más que utilizar las relaciones[17.55], podemos escribir
Ek
N
i 1
1
2mi v
2i
N
i 1
1
2mi (v i′ vcm)2
[17.68]N
i 1
1
2mi vi′
2N
i 1
1
2mi v
2cm (
N
i 1mi v i′) vcm
siendo nulo el tercer sumatorio, por representar la cantidad de movimiento total delsistema en el referencial del centro de masa del mismo. El primer sumatoriorepresenta la energía cinética interna y el segundo sumatorio puede escribirse en laforma
[17.69]N
i 1
1
2mi v
2cm
1
2(N
i 1mi) v
2cm
1
2mv 2
cm
de modo que [17.70]Ek1
2mv 2
cm
N
i 1
1
2mi vi′
2
La energía cinética total se puede separar en dos partes: una energía cinéticaasociada con el movimiento del centro de masa, llamada energía cinética orbital ode traslación del sistema, y una energía cinética interna13 que tan sólo depende delmovimiento de las partículas en el referencial del centro de masa, que no cambia
13 Cuando el sistema es un sólido rígido, la energía cinética interna recibe el nombre deenergía cinética de rotación.

510 Lec. 17.- Sistemas de partículas. Leyes de conservación.
cuando calculamos la energía cinética total en otro referencial. La energía cinéticainterna, al igual que el momento angular interno, tiene carácter intrínseco (energíacinética intrínseca) y sólo puede ser nula cuando todas las velocidades internas seannulas (vi′=0), esto es, cuando todas las partículas tengan la misma velocidad que elcentro de masa del sistema; entonces, el sistema estará realizando un movimiento detraslación pura. Por eso, la parte orbital de la energía cinética recibe el nombre deenergía de traslación.
Para terminar, debemos aclarar que las variaciones de las energías cinética orbital
Figura 17.11
e interna no están relacionadas directa y exclusivamente con los correspondientestrabajos realizados por las fuerzas externas e internas, por separado. Por ejemplo, enun sólido rígido en rotación alrededor de un eje fijo, es el trabajo realizado por las
fuerzas exteriores (el trabajo realizado por las fuerzasinteriores es nulo) el que producirá el cambio en laenergía cinética de rotación (energía cinética interna) delsólido rígido. En un automóvil, la energía cinética detraslación procede, indudablemente, del trabajo realizadopor el motor (trabajo interno), aunque es cierto que debeexistir una fuerza externa (que no es sino la fuerza derozamiento de los neumáticos con el pavimento) para
que se produzca una variación de la velocidad de traslación (vcm) del automóvil,fuerza que "no trabaja" (rozamiento estático en la rodadura) pero que proporcionaimpulso.
§17.10. Energía potencial.- Supongamos, como ocurre en muchos casos deinterés, que la fuerza externa que actúa sobre cada una de las partículas del sistemadependa tan sólo de la posición de ésta, i.e., Fi,ext(ri), y que sea conservativa. Además,supongamos que la fuerza interna total que actúa sobre dicha partícula puedaexpresarse en la forma Fi,int = Fij, donde las fuerzas Fij sean newtonianas (al menosen la forma débil) y dependan solamente de la posición relativa de la partículai-ésima respecto a la partícula j-ésima; i.e, Fij = -Fji y Fij = Fij(ri-rj). En estossupuestos, existirán unas funciones de energía potencial externa e interna, quedependerán tan sólo de las coordenadas de la partícula i-ésima y de las coordenadasrelativas rij, respectivamente; esto es
[17.71]
⎧⎪⎨⎪⎩
E ep,i E e
p,i (r i) E ep,i (xi,yi,zi)
Ep,ij Ep,ij (r ij) Ep,ij (xi xj, yi yj, zi zj)
tales que [17.72]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Fi,ext
∂E ep,i
∂xii
∂E ep,i
∂yij
∂E ep,i
∂zik ∇i E
ep,i
F ij∂Ep,ij
∂xiji
∂Ep,ij
∂yijj
∂Ep,ij∂zij
k ∇ij Ep,ij
donde la notación ∇i y ∇ij indica que la operación gradiente deberá hacerse conrespecto a las coordenadas de la partícula i-ésima y a las componentes del vector de

§17.10.- Energía potencial. 511
posición relativo rij, respectivamente. Obsérvese que, de la expresión [17.71b] de laenergía potencial interna, se sigue
[17.73]∂Ep,ij
∂xij
∂Ep,ij
∂xi
∂Ep,ij
∂xj
de modo que[17.74]
⎧⎪⎨⎪⎩
F ij ∇ij Ep,ij ∇i Ep,ij
F ji F ij ∇ij Ep,ij ∇j Ep,ij
de modo que la función Ep,ij sirve como función de energía potencial tanto para lafuerza Fij como para la fuerza Fji.
Calculemos ahora el trabajo elemental realizado por las fuerzas externas einternas cuando el sistema evoluciona, durante un intervalo de tiempo infinitesimal,dt, bajo la acción de dichas fuerzas; esto es
[17.75]dWN
i 1Fi,ext dr i
N
i 1Fi,int dr i
N
i 1Fi,ext dr i
N
i 1
N
j 1′ F ij dr i
El primer sumatorio de [17.75] corresponde al trabajo realizado por las fuerzasexteriores y puede expresarse en la forma
[17.76]
dWext
N
i 1Fi,ext dr i
N
i 1(∇i E
ep,i ) dr i
N
i 1dE e
p,i d (N
i 1E e
p,i) dE ep
donde hemos llamado a la energía potencial externa total, que, de acuerdo conE ep
las premisas de partida, será función de las coordenadas de las N partículas queconstituyen el sistema; esto es
[17.77]E ep E e
p (r1, r2, rN)
En cuanto al segundo sumatorio de [17.75], correspondiente al trabajo realizadopor las fuerzas internas, tenemos
[17.78]
dWint
N
i 1
N
j 1′F ij dr i
12
N N
i≠ j(F ij dr i F ji dr j)
12
N N
i≠ jF ij dr ij
12
N N
i≠ j(∇ij Ep,ij) dr ij
12
N N
i≠jdEp,ij d
⎛⎜⎜⎝
⎞⎟⎟⎠
12
N N
i≠jEp,ij dE i
p

512 Lec. 17.- Sistemas de partículas. Leyes de conservación.
donde [17.79]E ip
12
N N
i≠ jEp,ij
es la energía potencial interna total del sistema, que, de acuerdo con las premisasiniciales, sólo dependerá de las distancias relativas entre todas las partículas delsistema, siendo independiente de la elección de cualquier referencial.
Combinando las expresiones [17.75], [17.76] y [17.78], podemos escribir
[17.80]dW dWext dWint dE ep dE i
p d(E ep E i
p )
y llamando, finalmente, energía potencial total a la suma de las energías potencialesexternas e internas totales, tenemos
[17.81]dW dEp
de modo que, cuando son conservativas tanto las fuerzas externas como las internas,el trabajo total realizado por éstas es igual a la variación de la energía potencial total,cambiada de signo, del sistema. Vemos que este resultado no es más que unaextensión natural del obtenido para una partícula (Lec. 10) a un sistema de partículas.
Es conveniente destacar que de nuevo hemos separado una magnitud física, laenergía potencial, en dos partes: externa e interna. La primera de ellas es función delas posiciones de las partículas en un campo de fuerzas externo; la segunda parte sóloes función de las posiciones relativas de las partículas respecto a cada una de lasotras.
Si el sistema consiste en un sólido rígido, en el que las partículas mantienen fijassus posiciones relativas unas respecto a otras, entonces, la energía potencial internapermanecerá constante en cualquier proceso en el que esté implicado el sólido; eneste caso, podremos ignorar la energía potencial interna cuando calculemos la energíapotencial total del sistema (recordemos que tan sólo tienen significado los cambiosen la energía potencial, ya que la elección de un nivel de energía potencial nula esarbitraria).
§17.11. Conservación de la energía.- Cuando todas las fuerzas que actúansobre las partículas de un sistema (externas e internas) son conservativas, hemos vistoque podemos encontrar una función energía potencial total
[17.82]Ep
N
i 1E e
p,i12
N N
i≠ jEp,ij E e
p E ip
tal que el trabajo elemental dW, efectuado por todas las fuerzas durante un intervalode tiempo dt viene dado por [17.81]; combinando la expresión [17.81] con la expresión[17.67] del teorema de la energía cinética, tenemos
[17.83]dW dEk dEp
o sea [17.84]d (Ek Ep ) dE 0

§17.11.- Conservación de la energía. 513
donde E es la energía total del sistema de partículas. La expresión anterior constituyela ley de conservación de la energía
[17.85]E Ek Ep cte
en el supuesto de que todas las fuerzas sean conservativas.Si las fuerzas internas son conservativas, pero no sucede lo mismo con las
fuerzas externas, el teorema de la energía se expresa en la forma
[17.86]dW dWext dWint dWext dE ip dEk
o sea [17.87]dWext d (Ek E ip )
de modo que el trabajo realizado por las fuerzas externas (no-conservativas) es igualal cambio en la energía cinética más el producido en la energía potencial interna. Lacantidad
[17.88]U Ek E ip
recibe el nombre de energía propia del sistema; es igual a la suma de las energíascinéticas de las partículas del sistema respecto a un observador inercial y de suenergía potencial interna que, como ya hemos visto, es independiente del referencialelegido.
Con esta definición, la expresión [17.87] puede escribirse en la forma
[17.89]dU dWext
de modo que
el cambio en la energía propia de un sistema de partículas es igual al trabajorealizado sobre el sistema por las fuerzas externas.
En el caso de que el sistema esté aislado, de modo que al ser Fext = 0, será Wext =0, entonces dU = 0, sea que la energía propia permanecerá constante, bajo lasuposición de que las fuerzas internas sean conservativas.
Hemos visto que la energía cinética interna de un sistema de partículas, esto es,la energía cinética del sistema medida en el referencial del centro de masa, tienecarácter intrínseco. Por otra parte, la energía potencial interna, que depende tan sólode las distancias entre las partículas, también tiene carácter intrínseco. De ahí se sigueque podamos definir la energía interna o intrínseca de un sistema de partículas comola suma de las energías cinéticas y potencial internas; esto es
[17.90]E i E ik E i
p
Normalmente, cuando nos referimos a la energía de un sistema de partículas, lohacemos a la energía interna del mismo, aun cuando no escribamos el superíndice "i"(esto equivale a considerar un sistema aislado, puesto que entonces siempre esposible hacer E = Ei). En muchas ocasiones, la energía potencial interna de unsistema de partículas es despreciable comparada con su energía cinética. Eso es lo

514 Lec. 17.- Sistemas de partículas. Leyes de conservación.
que ocurre, por ejemplo, en el caso de un gas a alta temperatura. En esascircunstancias, la energía interna puede considerarse esencialmente cinética y elprincipio de conservación de la energía se reduce a la conservación de la energíacinética.
Podemos relacionar la energía propia del sistema con la energía interna delmismo, ya que
[17.91]U Ek E ip
12mv 2
cm E ik E i
p12mv 2
cm E i
Obsérvese que, para un sistema aislado, al ser vcm = cte, será constante la energíapropia del sistema siempre que lo sea la energía interna, y viceversa. Esto es, cuandola energía se conserva en un referencial inercial (en el SL) también se conserva enel referencial del centro de masa (SCM), y recíprocamente.
Las leyes de conservación de la cantidad de movimiento, del momento angulary de la energía constituyen las piedras angulares de la Física actual, siendo válidasen general para todas las teorías físicas. Pero debemos dejar bien claro que no hemosdemostrado esas leyes de conservación. Tan sólo hemos deducido varias consecuen-cias interesantes de las leyes del movimiento de Newton; esto es, si las leyes deNewton se cumplen en situaciones concretas, entonces se conservan la cantidad demovimiento, el momento angular y la energía del sistema.
De acuerdo con lo que acabamos de decir, las leyes de conservación tendrían unavalidez limitada, aun cuando las basemos en consideraciones de homogeneidad eisotropía del espacio. Pero estamos tan satisfechos con tales leyes de conservaciónque estamos dispuestos a extrapolarlas incluso fuera del campo donde las hemosexperimentado, insistiendo en que deben ser válidas en cualquier teoría física, inclusoen aquellas situaciones en las que la Mecánica Newtoniana o Clásica ya no es válida,como por ejemplo, en las interacciones entre cargas en movimiento o en los sistemasmecano-cuánticos. En este sentido, las leyes de conservación no son leyes sinopostulados o principios que, insistimos, han de cumplirse en cualquier teoría física,aun cuando ello exija redefinir nuestros conceptos previos. Así, por ejemplo, parapartículas cargadas en movimiento encontramos que la energía total, definida como(Ek + Ep) no es constante; entonces, en lugar de abandonar la ley de conservación dela energía redefinimos el concepto de energía de modo que incluya la energíaelectromagnética y la ley de conservación sigue siendo válida. Este modo de procederes satisfactorio siempre que sus consecuencias no se contradigan con la experiencia;este es el caso de las cargas móviles.
Vemos pues que las leyes de conservación son nociones preconcebidas con lasque tratamos de ordenar los fenómenos físicos; las leyes de conservación no son unarealidad física, sino una consecuencia de nuestra firme decisión de establecerlas deese modo. Afirmar que siempre será posible encontrar definiciones de cantidad demovimiento, de momento angular y de energía de modo que las leyes de conserva-ción sigan siéndolo conforme se van descubriendo fenómenos nuevos, no pasa de serun enunciado de carácter físico que puede o no ser cierto. Hasta ahora lo ha sido.

Problemas 515
Problemas
17.1.- Aun cuando sea nula la resultante de lasfuerzas que actúan sobre un sistema de partí-culas, el momento resultante de tales fuerzasno tiene porqué ser necesariamente nulo.Demostrar que en las condiciones anteriores elmomento resultante es independiente del puntoelegido como centro de reducción.
17.2.- Formular y demostrar una ley de conser-vación del momento angular respecto a unpunto dado para un sistema de partículasconfinado en un plano.
17.3.- Dos partículas de masas 4 g y 5 g semueven con velocidades respectivas de10 cm/s a lo largo del eje x y de 12 cm/s enuna dirección que forma un ángulo de 60° condicho eje. a) Calcular la velocidad del centrode masa. b) Expresar la velocidad de cadapartícula en el SCM. c) Calcular la cantidad demovimiento de cada partícula en el SCM.d) Calcular la energía cinética total en losreferenciales del laboratorio y del centro demasa.
17.4.- Consideremos de nuevo las dos partícu-las del Problema 17.3, y supongamos que enun instante dado se encuentran respectivamenteen los puntos (0,2,0) y (3,2,0). a) Determinarla posición del centro de masa. b) Calcular elmomento angular total respecto al origen decoordenadas y respecto al CM.
17.5.- En la figura se muestra un sistema
Prob. 17.5
constituido por dos bloques de masa m1 y m2,respectivamente, que reposan sobre una su-perficie horizontal lisa, entre los que hay unmuelle ideal, de constante elástica k y longitudnatural l0, inicialmente comprimido hasta unalongitud l < l0. Cuando se abandona el sistemapartiendo del reposo, el muelle recupera sulongitud natural, empujando a ambos bloquescon fuerzas iguales y opuestas, hasta que final-mente se desprende y cae sobre la superficie,mientras los bloques continúan moviéndose.
a) Expresar la energía potencial interna dedicho sistema en función de la distancia xentre los dos bloques. b) Encontrar la razónexistente entre las energías cinéticas finales delos bloques y explicar porqué el bloque demenor masa recibe la mayor parte de la ener-gía potencial inicial, a pesar de que las fuerzasque actúan sobre cada bloque son de la mismaintensidad en todo instante.
17.6.- Tres partículas, cuyas masas son m1 = 3,m2 = 1, m3 = 2 unidades, se mueven bajo la in-fluencia de un campo de fuerzas externo y delas fuerzas (newtonianas) de interacción mutua,de modo que sus vectores de posición conrelación a un sistema coordenado inercialvienen dados por
r1 = 4i + (2t3-4)j - 12k
r2 = (6t-2t2)i - 2tj + 6t3k
r3 = (4t2-3)i + 4tj + 3k
donde t es el tiempo. a) Encontrar la expresióndel vector de posición del centro de masa delsistema, así como la velocidad y la aceleracióndel mismo. b) Calcular la cantidad de movi-miento total del sistema. c) Calcular la fuerzatotal que actúa sobre el sistema y sobre cadapartícula del sistema. ¿Podemos saber quefracción de dichas fuerzas es de origen internoy cuál de origen externo? d) Comprobar que secumple que Fext = dp/dt.
17.7.- Volvamos a considerar las tres partículasdel Problema 17.6. a) Calcular el momentoangular y el momento total de las fuerzasexternas que actúan sobre las partículas conrespecto al origen de coordenadas. b) Com-probar que Mext = dL/dt.
17.8.- Continuamos con el Problema 17.7.a) Calcular el momento angular total y elmomento externo total con respecto a la partí-cula de masa m1. b) ¿Se cumple ahora queMext = dL/dt?
17.9.- En el Problema 17.7, separar el momen-to angular total en el instante t = 1 en dospartes, correspondientes al momento angularinterno y orbital, respectivamente.

516 Lec. 17.- Sistemas de partículas. Leyes de conservación.
17.10.- En el Problema 17.6, calcular eltrabajo realizado por las fuerzas que actúansobre las partículas cuando el sistema evolu-ciona durante el intervalo de tiempo t = 0 a t =1. ¿Podemos separar el trabajo realizado porlas fuerzas internas del trabajo realizado porlas fuerzas externas? Explíquese.
17.11.- En el Problema 17.6, separar la energíacinética total del sistema, en los instantes t =0 y t = 1, en dos partes, correspondientes a laenergía cinética interna y orbital, respectiva-mente.
17.12.- Se dispara un proyectil en una direc-ción que forma un ángulo de 45° con la hori-zontal y con una velocidad inicial de 458 m/s.Cuando el proyectil alcanza el punto más altode su trayectoria, explota, fragmentándose endos parte de igual masa. Un fragmento, cuyavelocidad inicial es cero, cae verticalmente.a) ¿Qué cantidad de energía se liberó en laexplosión? b) ¿A qué distancia del punto dedisparo caerá sobre el terreno el otro fragmen-to, suponiendo que todo el terreno es plano yhorizontal?
17.13.- Con un mortero, se dispara vertical-mente una granada, con una velocidad inicialde 300 m/s. Cuando la granada alcanza elpunto más alto de su trayectoria, explota entres fragmentos de masas iguales. Uno de losfragmentos continúa subiendo verticalmentecon una velocidad de 100 m/s; otro fragmentosube con una velocidad inicial de 250 m/s,formando un ángulo de 45° con la vertical.Calcular: a) La velocidad y dirección inicialesdel tercer fragmento, b) la energía liberada enla explosión de la granada y c) los puntos decaída sobre el terreno de los tres fragmentos.d) Explicar como se mueve el centro de masade la granada antes y después de la explosión.
17.14.- Una tablilla recta, de 20 cm de longi-tud y 40 g de peso, flota sobre el agua tran-quila de una piscina, perpendicularmente a unade las paredes de la misma y con uno de susextremos en contacto con la pared. En el otroextremo de la tablilla, se encuentra un insectoque pesa 8 g. El insecto comienza a caminarsobre la tablilla, en dirección hacia la pared dela piscina. ¿A qué distancia de la pared seencontrará el insecto cuando se detenga en elotro extremo de la tablilla?
17.15.- Un bloque de masa M desliza sin
Prob. 17.15
fricción sobre una guía horizontal. En el centrodel bloque está suspendida una masa pendularm, de pequeñas dimensiones, unida a unavarilla rígida y ligera. Abandonamos la masapendular desde la posición horizontal, como se
indica en la figura. a) Determinar eldesplazamiento horizontal, s, que experimen-tará el bloque cuando la varilla alcance laposición horizontal al otro lado del bloque.b) Calcular las velocidades del bloque y de lamasa pendular cuando ésta pasa por la posi-ción más baja.
17.16.- Un bastidor, de 5 kg de masa y cuyas
Prob. 17.16
dimensiones son las que se indican en la figuraadjunta, se encuentra inicialmente en repososobre un superficie horizontal lisa. En el centrode la superficie enmarcada por el bastidor haydos bloques, de masas ma = 1 kg y mb = 4 kg,entre los que se mantiene comprimido unmuelle. Inicialmente, el centro de masa delsistema se encuentra situado en el centro geo-métrico de bastidor. Cuando el muelle se dis-tiende, la masa ma sale despedida con unavelocidad de 6 m/s y finalmente queda empo-trada en A; la masa mb se empotra en B. Daruna descripción detallada del movimiento delsistema.
17.17.- Dos bloques, de
Prob. 17.17
masas respectivas m1 ym2, con m1>m2, estánunidos mediante unhilo flexible y ligeroque pasa por la gargan-ta de una polea lisa,como se muestra en lafigura adjunta. Calcularla aceleración delcentro de masa de los

Problemas 517
dos bloques cuando se abandona el sistemapartiendo del reposo.
17.18.- Una cuña de masa M se encuentra en
Prob. 17.18
reposo sobre un tablero horizontal, como semuestra en la figura. En la parte más alta de lacuña reposa un pequeño bloque de masa m, auna altura h sobre el tablero horizontal. Todaslas superficies son perfectamente lisas.Abandonamos el sistema, de modo que elbloque desciende y la cuña retrocede. Encon-trar la velocidad de retroceso de la cuña en elinstante en que el bloque toca el tablero hori-zontal.
17.19.- Un fusil está
Prob. 17.19
suspendido mediantedos hilos ligeros, enposición horizontal,como se muestra en lafigura. El fusil pesa5 kg, su ánima mide80 cm y dispara unproyectil de 10 g de masa con una velocidad(respecto a tierra) de 500 m/s. Supongamos,por simplificar, que la fuerza que ha actuadosobre la bala en el ánima sea constante.a) Calcular la velocidad de retroceso del fusil.b) Determinar las aceleraciones del proyectil ydel fusil. c) Calcular el tiempo que el proyectilha empleado en recorrer el ánima del fusil.d) Determinar la fuerza constante que haactuado sobre el proyectil.

518 Lec. 17.- Sistemas de partículas. Leyes de conservación.
18.- Sistemas de masa variable.El problema de 2-cuerpos.
§18.1. Sistemas de masa variable (519); §18.2. Fundamentos de la propulsión de los cohetes(522); §18.3. El problema de dos cuerpos (525); §18.4. Masa reducida (528);§18.5. Momento angular y energía cinética (529); §18.6. Oscilaciones de dos cuerpos (531);§18.7. Movimiento en el Sistema Solar (534); Problemas (536)
El contenido y enfoque de la lección precedente tuvo un carácter fundamental, teórico,abstracto, sin apenas concesiones a los aspectos prácticos. Por eso, consideramos necesario comple-tarla con esta otra, en la que plantearemos unos problemas de índole práctica, con escasa relaciónentre sí, pero que constituyen el complemento natural y necesario de la lección anterior.
§18.1. Sistemas de masa variable.- En la Lección 17 hemos enunciado losteoremas y leyes generales que gobiernan la evolución de los sistemas materiales.Son numerosísimos los problemas físicos que pueden resolverse utilizandoadecuadamente los teoremas y leyes de conservación de la cantidad de movimiento,del momento angular y de la energía. Al decir adecuadamente, queremos significarque dichos teoremas y leyes deben utilizarse en el contexto preciso en que fueronenunciados. Así, las leyes de conservación de la cantidad de movimiento y delmomento angular, y los teoremas correspondientes de los que se deducen, puedenaplicarse a cualquier sistema físico, con tal que se tengan en cuenta todas las fuerzasy momentos externos que actúan sobre él. La ley de conservación de la energíamecánica (cinética + potencial) sólo será utilizable cuando todas las fuerzas seanconservativas, de modo que no haya conversión de energía mecánica a otro tipo deenergía, a menos que podamos valorar el montante de dicha conservación.
En todo caso, destacaremos que los teoremas y leyes de conservación se refierena sistemas materiales bien definidos y al utilizarlos hemos de tener sumo cuidado enprecisar que es lo que se incluye en el sistema al cual se aplican. Recordemos queuno de los supuestos de partida en el desarrollo de la lección anterior (§17.1) fue queel sistema de partículas considerado debería ser un sistema cerrado, esto es, que nointercambiaría masa con el exterior (sistema de masa constante), aunque si podríaintercambiar cantidad de movimiento, momento angular y energía con su ambiente(sistema no-aislado).
Manuel R. Ortega Girón 519

520 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
Hasta ahora nos hemos ocupado solamente de sistemas cerrados, en los que la
Figura 18.1
masa del sistema permanecía constante en el transcurso del tiempo. En este artículotrataremos con sistemas abiertos, que intercambian masa con el exterior, de modoque su masa variará en el transcurso del tiempo. Así, por ejemplo, cuando una gotade agua cae en la atmósfera, va recogiendo moléculas de vapor de agua atmosféricoen su caída, de modo que su tamaño y masa (considerada la gota como el sistema)va aumentando. Otro ejemplo de sistema de masa variable lo constituye un cohete,cuya masa va disminuyendo a medida que se va quemando el combustible.
Para estudiar en general tales sistemas de masa variable, consideraremos unsistema, de masa instantánea m, cuyo centro de masa se está moviendo en eseinstante t con una velocidad v en un cierto referencial inercial, y que se encuentrasometido a una fuerza resultante externa Fext, no representada en la Figura 18.1a. Uncierto instante posterior, t + dt, la configuración del sistema habrá cambiado, porhaber sido alcanzado dicho sistema por una masa elemental dm que se movíainicialmente con una velocidad u, medida también en el mismo referencial inercial.
Nuestro propósito primordial es establecer la forma que tomará la segunda leydel movimiento para el sistema de masa m, siendo m variable en el transcurso deltiempo. Podemos analizar la situación considerando el sistema global m + dm, quees un sistema de masa constante al que podemos aplicar sin ambages los resultadosobtenidos hasta ahora. Puesto que el sistema global (m + dm) es de masa constante,podemos asegurar que para él es
[18.1]Fextdt dp
o sea que la impulsión elemental producida por la resultante de las fuerzas externasal sistema durante el intervalo de tiempo elemental dt es igual al cambio elementalde la cantidad de movimiento del mismo. Podemos escribir
[18.2]Fextdt (m dm)(v dv) (mv u dm) m dv v dm u dm
donde hemos despreciado el infinitésimo de segundo orden dmdv. La expresiónanterior podemos reescribirla en la forma
[18.3]Fext m dvdt
v dmdt
u dmdt

§18.1.- Sistemas de masa variable. 521
o sea [18.4]Fextd(mv)
dtu dm
dt
que no es sino la expresión de la segunda ley de Newton, que define la fuerzaexterna que actúa sobre un sistema material cuya masa no permanece constante enel transcurso del tiempo, por estar recibiendo un aporte de masa y, por supuesto, decantidad de movimiento desde el exterior.
Debemos reparar en que las ecuaciones anteriores, [18.3] y [18.4], se reducen a loscasos familiares
[18.5]Fext ma Fextd(mv)
dt
respectivamente, siempre que el sistema que estemos considerando tenga masaconstante; esto es, siempre que no intercambie masa con el exterior ([18.5a]), o inclusocuando intercambiándola sea u = 0 ([18.5b]).
También deberemos observar que no es posible obtener las expresiones [18.3] y [18.4] a partirde la [18.5b], considerando la masa variable al efectuar la derivación. En efecto, de [18.5b] se sigue
[18.6]Fextd(mv)
dtm dv
dtv dm
dt
que tan sólo es un caso particular de las expresiones [18.3] y [18.4], correspondiente a la situaciónen que u = 0, esto es, cuando la masa que se incorpora o sale del sistema se encuentra en reposoen el referencial inercial que hayamos elegido.
Para estudiar el movimiento de un sistema abierto (de masa variable) hemostenido que recurrir a incluir la masa elemental dm que se aporta (o que se desprende)al sistema en un sistema global de masa constante. Esto ha sido necesario porque laexpresión Fext = dp/dt sólo puede utilizarse para sistemas cerrados, aun cuando enellos exista intercambio de masa entre sus diversas partes. Sin embargo, en muchosproblemas, como en los referentes al movimiento de los cohetes, estaremosinteresados estrictamente en el estudio del movimiento de una de las partes delsistema. Entonces será conveniente definir como sistema principal esa parte cuyomovimiento nos interesa, aun cuando su masa varíe con el tiempo. En esascondiciones, será más interesante reescribir la expresión [18.3] en la forma
[18.7]Fext (u v) dmdt
m dvdt
que posee una interpretación física más evidente. El primer término del primermiembro representa el ritmo con que la fuerza externa (el medio ambiente) estásuministrando cantidad de movimiento al sistema de masa m (variable); el segundotérmino representa el ritmo con que se está transfiriendo cantidad de movimiento alsistema principal, de masa m (variable), por la masa que se le incorpora o que saledel mismo. Este segundo término deberá interpretarse como la fuerza "ejercida" sobreel sistema principal por la masa que se la incorpora o sale de él. En el caso de uncohete, este término recibe el nombre de empuje; en general lo llamaremos fuerza dereacción y lo designaremos por Freac; i.e.,

522 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
[18.8]Freac (u v) dmdt
La suma de esas dos fuerzas es la fuerza total que actúa sobre el sistemaprincipal, que será igual al producto de la masa m (variable) del mismo por laaceleración de su centro de masa; i.e.,
[18.9]Fext Freac ma
como si se tratase de un sistema cerrado (i.e., de masa constante).La cantidad u - v es la velocidad relativa de la masa que se incorpora o sale del
sistema principal respecto a este mismo sistema; esto es
[18.10]urel u v
de modo que las expresiones [18.7] y [18.8] suelen escribirse como
[18.11]Fext ureldmdt
m dvdt
y [18.12]Freac ureldmdt
§18.2. Fundamentos de la propulsión de los cohetes.- A todos nos resultafamiliar el movimiento de un cohete, bien sea un simple cohete verbenero o uncohete encargado de poner en órbita un satélite artificial; en todo caso, el cohete esimpulsado hacia delante por el chorro de gases que expulsa hacia atrás.
Un motor cohete (o de propulsión a chorro,
Figura 18.2
como popularmente se le llama), consiste esen-cialmente en una cámara de combustión, donde sequema un combustible sólido o líquido, quedispone de unas aberturas y toberas dispuestas enla forma adecuada para dirigir los gases proceden-tes de dicha combustión en la dirección deseada.El sistema cohete + combustible (+ comburente,naturalmente) puede considerarse como unsistema global de masa constante. Cuando seinicia la combustión, los gases salen expelidos agran velocidad, o sea, con una cierta cantidad demovimiento "hacia atrás"; en consecuencia, envirtud del principio de la conservación de la
cantidad de movimiento, el cohete adquiere una cantidad de movimiento igual "haciaadelante". Esto es, el cohete es propulsado hacia adelante por la expulsión hacia atrásde una parte de su masa. Si nos interesamos solamente por el movimiento del cohete,estamos ante un problema en que varía (disminuyendo) la masa del sistema principal.
Naturalmente, la energía necesaria para acelerar los gases resultantes de la combustión, y endefinitiva para acelerar el cohete, precede de la energía liberada en dicha combustión. Cuando se

§18.2.- Fundamentos de la propulsión de los cohetes. 523
inicia la ignición del combustible, y mientras que el cohete se mueve lentamente respecto a laTierra, el motor del cohete resulta ser muy poco eficaz, pues casi toda la energía liberada en lacombustión se emplea en comunicar energía cinética (acelerar) a los gases expelidos, que adquierenuna gran velocidad respecto a Tierra. Pero conforme el cohete va aumentando su velocidad, losgases de salida, que son expelidos con una velocidad constante respecto al cohete, tendrán cada vezmenos velocidad respecto a Tierra. Cuando la velocidad del cohete con respecto a Tierra llega aser igual (en módulo) a la velocidad de los gases respecto al cohete, entonces los gases, alabandonar el cohete (o mejor, cuando el cohete los abandona a ellos), no tienen velocidad respectoa Tierra, de modo que su energía cinética es nula (en el referencial de Tierra). En estas condiciones,toda la energía liberada en la combustión se aprovecha (salvo pérdidas) para aumentar la energíacinética del cohete. Es fácil comprender la conveniencia de un "empujón" inicial para un aprovecha-miento óptimo del combustible.
Al estudiar el movimiento del cohete debemos tener en cuenta que éste es unsistema de masa variable, ya que su masa va disminuyendo a medida que se quemael combustible. En un referencial inercial, la ecuación diferencial del movimiento delcohete se escribe en la forma [18.7]; esto es
[18.13]Fext (u v) dmdt
m dvdt
donde Fext es la resultante de las fuerzas externas (fuerzas gravitatorias, resistenciadel aire, ...) que actúan sobre el cohete, m es la masa del cohete más la delcombustible que contiene en un instante dado y u y v son, respectivamente, lasvelocidades del cohete y de los gases expelidos respecto a un mismo referencialinercial. La diferencia de velocidades (u - v) representa, obviamente, la velocidadde salida de los gases respecto al cohete, esto es, urel, de modo que podemosescribir, una vez más
[18.14]Fext ureldmdt
m dvdt
donde el término ureldm/dt representa el "empuje" proporcionado por el motor cohete;
[18.15]Femp ureldmdt
Puesto que dm/dt es negativo (por representar una pérdida de masa por unidad detiempo) el "empuje" tiene dirección opuesta a urel.
Si para el instante inicial t=0 es m = m0 y v = v0, por integración de la ec. dif.del movimiento [18.14] obtendremos la velocidad del cohete en función del tiempo.Suponiendo urel = cte, tenemos:
[18.16]v v0 urel lnmm0
⌡⌠t
0
Fextm
dt
Consideremos el caso de un lanzamiento vertical ascendente, desde la superficieterrestre, despreciemos la resistencia que presenta el aire al movimiento del cohete,así como el movimiento de rotación de la Tierra, y supongamos constante el valorde la intensidad del campo gravitatorio (i.e., g=cte, lo que equivale a considerar tan

524 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
sólo lanzamientos hasta poca altura). En las condiciones anteriormente expuestas, lafuerza externa que obra sobre el cohete es su propio peso, Fext = mg, y la expresiónanterior se reduce a
[18.17]v v0 urel lnmm0
g t
y, teniendo en cuenta que urel y g están dirigidos hacia abajo, escribiremos
[18.18]v v0 urel lnm0
mgt
Si el combustible se quema a ritmo constante α = - dm/dt,
[18.19]m m0 α t
será la masa del cohete al cabo de un tiempo t; en estas condiciones, la velocidad delcohete será función exclusivamente del tiempo y vendrá dada por
[18.20]v v0 urel lnm0
m0 α tg t
Supongamos, además, que una fracción f (<1) de la masa inicial del cohetecorresponda al combustible. La masa final del cohete, una vez agotado el combusti-ble, será mf = (1 - f) m0 y el tiempo empleado en quemar todo el combustible serátf = fm0/α, resultando que la velocidad final del cohete será
[18.21]vfinal v0 urel ln 11 f
fm0
αg
de modo que la velocidad final del cohete será tanto mayor cuanto mayor sea lavelocidad de expulsión de los gases respecto al cohete.
Si el cohete se mueve en el espacio libre, fuera de la acción gravitatoria (i.e.,g=0), será nulo el último término de [18.21]; en estas condiciones, la velocidad finaldel cohete depende solamente de la velocidad de escape de los gases y de la fracciónde la masa original del cohete que corresponde al combustible, con independencia delritmo a que sea quemado el combustible. Evidentemente, si el ritmo de expulsión demasa es muy lento, el tiempo necesario para alcanzar la velocidad final será muylargo.
La integración de la expresión [18.20] nos permite expresar la posición del coheteen función del tiempo:
[18.22]z z0 (v0 t1
2g t 2) urel
⎛⎜⎜⎝
⎞⎟⎟⎠
tm0 α t
αlnm0 α tm0
como el lector comprobará fácilmente, donde z0 representa la posición inicial delcohete (para t = 0).

§18.3.- El problema de dos cuerpos. 525
§18.3. El problema de dos cuerpos.- En una lección anterior (Lec. 12) hemosestudiado el movimiento de una partícula bajo la acción de una fuerza central,insistiendo, por su espacial interés, en el caso de fuerzas centrales inversamenteproporcionales al cuadrado de la distancia. Se asumía, entonces, que el objetoresponsable de la fuerza que actuaba sobre la partícula en movimiento erasuficientemente másico como para considerarlo como un centro de fuerzas fijo. Deesta forma idealizábamos el problema general, el de la interacción mutua entre dospartículas, reduciéndolo al del movimiento de una sola partícula en un campo defuerzas estacionario. Sin embargo, podemos conseguir que la solución que obtuvimosentonces corresponda al problema general de interacción mutua entre dos partículasde masas similares, de modo que ambas partículas se encuentren realmente enmovimiento y no podamos referirnos a ninguna de ellas como a un centro de fuerzasinmóvil. Bastará para ello introducir algunas pequeñas correcciones a las solucionesque obtuvimos en la Lección 12.
Consideraremos en este artículo el movimiento de un sistema de dos partículas
Figura 18.3
bajo la acción de fuerzas internas al sistema (fuerzas de interacción entre las dospartículas) que satisfagan la tercera ley de Newton (al menos en su forma débil) ya ninguna fuerza externa al sistema o a fuerzas externas que satisfagan unas condi-ciones bastante restrictivas que especificaremos más adelante. El método que vamosa utilizar nos permitirán separar el problema en dos problemas independientes,referentes cada uno de ellos al movimiento de una sola partícula, lo que constituyeuna notable simplificación.
Sean dos partículas, de masas res-pectivas m1 y m2, sobre las que actúanfuerzas exteriores F1,ext y F2,ext e internasF12 y F21 ejercidas por cada partículasobre la otra y que satisfagan la terceraley de Newton (en su forma débil, almenos)
[18.23]F12 F21
Las ecuaciones del movimiento de lasdos partículas, en un referencial inercialúnico, son
[18.24]m1r1 F12 F1,ext m2r2 F21 F2,ext
que son dos ec. dif. ligadas, ya que F12 = -F21 = F(r1-r2). En consecuencia, resultaconveniente introducir nuevas variables en lugar de r1 y r2
[18.25]rcmm1r1 m2r2m1 m2
r12 r1 r2
donde rcm es el vector de posición del centro de masa del sistema de dos partículasy r12 es el vector de posición relativo de m1 respecto a m2. Sumando miembro amiembro las expresiones [18.24], y teniendo en cuenta [18.23] y [18.25a], se obtiene

526 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
[18.26](m1 m2) rcm F1,ext F2,ext
que es la ecuación del movimiento del centro de masa del sistema.Multiplicando las expresiones [18.24] por m2 y m1, respectivamente, restando
miembro a miembro las expresiones resultantes y teniendo en cuenta [18.23] y [18.25b],se obtiene finalmente
[18.27]m1m2 r12 (m1 m2)F12 m1m2
⎛⎜⎜⎝
⎞⎟⎟⎠
F1,extm1
F2,extm2
Supongamos ahora que las fuerzas externas son tales que
[18.28]F1,extm1
F2,extm2
y adoptemos la notación siguiente
[18.29]Fext F1,ext F2,ext M m1 m2 μm1m2
m1 m2
Entonces, las expresiones [18.26] y [18.27] pueden reescribirse en la forma quecorresponde a la ecuación del movimiento de una sola partícula
[18.30]M rcm Fext μ r12 F12
Estas dos ecuaciones están ahora completamente separadas, a diferencia de lo queocurría con las ecuaciones [18.24] que estaban ligadas (recuérdese que la fuerza F12
depende solamente de la posición relativa entre las partículas 1 y 2, i.e., de r12).La ec. dif. [18.30a] es la del movimiento del centro de masa del sistema (de dos
o de muchas partículas); en ausencia de fuerzas externas, dicho centro de masa semoverá con velocidad constante (vcm = cte).
La ec. dif. [18.30b] es la del movimiento de una sola partícula de masa μmoviéndose bajo la acción de la fuerza F12 que ejerce la partícula 2 sobre la partícula1. La masa μ recibe el nombre de masa reducida, en atención a que es menor quecada una de las masas m1 y m2. Así pues, el movimiento de la partícula 1 visto desdela partícula 2 (movimiento relativo) es como si la partícula 2 fuese un centro defuerzas fijo y la partícula 1 tuviese una masa igual a la masa reducida del sistema.
Recordemos que la ec. dif. [18.30b] es aplicable en ausencia de fuerzas exterioreso cuando existiendo éstas resultan ser proporcionales a las masas de las partículas,como exige la expresión [18.28]. Esta segunda condición se cumple cuando las fuerzasexternas son de naturaleza gravitatoria, ejercidas por masas que disten de las dospartículas mucho más que estas entre sí. Así, por ejemplo, en el sistema de doscuerpos Tierra-Luna, la distancia entre éstos (384 403 km) es mucho menor que laque los separan del Sol (149.57 × 106 km) y de los otros planetas. En cambio, en elcaso de partículas cargadas eléctricamente, las fuerzas externas de naturalezaelectromagnética (que suelen predominar sobre las de naturaleza gravitatoria) no sonproporcionales a la masa, sino a la carga eléctrica de las partículas, y por ello no será

§18.3.- El problema de dos cuerpos. 527
aplicable la ecuación [18.30b] cuando existan fuerzas externas relacionadas con lacarga de las partículas.
En general, y dentro de las condiciones de validez de la expresión [18.30b],podemos enunciar que
el movimiento relativo entre las dos partículas es equivalente al movimientode una sola partícula, cuya masa es la masa reducida del sistema, moviéndo-se respecto de la otra partícula como si de un centro de fuerzas fijo setratara.
Por supuesto que ninguna de las dos partículas está fija; si acaso lo estará el centrode masa del sistema, cuando no actúen fuerzas externas, eligiendo convenientementeel referencial inercial.
¿Qué uso podemos hacer de las ec. [18.30]? Evidentemente, si podemos resolverlas ecuaciones [18.30], que son independientes entre sí, también podremos resolver elproblema de las dos partículas. Cuando hayamos encontrado rcm y r12 en función deltiempo, esto es, cuando conozcamos el movimiento del centro de masa y elmovimiento relativo de la partícula 1 respecto a la 2, podremos obtener las posicionesde las partículas, r1(t) y r2(t), resolviendo el sistema de ecuaciones [18.25]; se obtiene
[18.31]
⎧⎪⎪⎨⎪⎪⎩
r1 rcmm2
m1 m2
r12 rcmμm1
r12
r2 rcmm1
m1 m2
r12 rcmμm2
r12
Ejemplo I.- Dos partículas, de masas m1 y m2, respectivamente, están inicialmente en repososeparadas por una distancia D, sometidas tan sólo a su acción gravitatoria mutua. Calcular el tiempoque transcurrirá hasta que colisionen.
Las ec. dif. del movimiento son
(m1 m2) xcm Fext μ x12 F12
con
Figura 18.4
Fext 0 F12 Gm1m2
x 212
μm1m2
m1 m2
por consiguiente, el centro de masas del sistema perma-nece estacionario y lo tomaremos como origen de las coordenadas x1 y x2 de las partículas.
La aceleración relativa será
a12 x12
F12
μGm1m2
μx 212
Gm1 m2
x 212
v12
dv12
dx12
de donde

528 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
⌡⌠v12
0
v12 dv12
12v 2
12 G(m1 m2) ⌡⌠x12
D
dx12
x 212
G(m1 m2)⎛⎜⎜⎝
⎞⎟⎟⎠
1x12
1D
o seav12 2G(m1 m2)
⎛⎜⎜⎝
⎞⎟⎟⎠
1x12
1D
dx12
dt
Integrando de nuevo tf ⌡⌠tf
0
dt 1
2G(m1 m2)⌡⌠
0
D
dx12
1
x12
1
D
y con el cambio de variable
x12 D sen2θ dx12 2D senθ cosθ dθ
obtenemos finalmente el tiempo pedido:
tf2D 3/2
2G(m1 m2)⌡⌠
0
π/2
sen2θ dθ 2D 3/2
2G(m1 m2)
⎡⎢⎣
⎤⎥⎦
θ2
sen 2θ4
0
π/2
π D 3/2
2 2G(m1 m2)
§18.4. Masa reducida.- La masa reducida de un sistema de dos partículas haquedado definida por [18.29c], lo que equivale a la media armónica de las dos masas;i.e.,
[18.32]1μ
1m1
1m2
La masa reducida, como su nombre indica, tiene un valor menor que m1 y m2, siendola menor de ambas masa la que tiende a predominar en el valor de μ. En el caso enque ambas partículas tengan la misma masa, m1 = m2 = m, la masa reducida es
[18.33]μm1m2
m1 m2
m 2
2mm2
esto es, la mitad de la masa de cada una de ellas.En el caso en que una de las partículas tenga una masa mucho menor que la otra,
por ejemplo m1 « m2, será
[18.34]μm1m2
m1 m2
m1
1m1
m2
≈ m1
⎛⎜⎜⎝
⎞⎟⎟⎠
1m1
m2
≈ m1
donde hemos utilizado la aproximación (1 + )n ≈ 1 + n , cuando « 1.

§18.4.- Masa reducida. 529
Así pues, cuando una de las partículas es mucho más ligera que la otra, la masa
Figura 18.5
reducida es aproximadamente igual (algo menor) a la masa de la más ligera. Porejemplo, en el sistema de dos partículas protón-electrón (átomo de hidrógeno) es
[18.35]μ ≈ me (1me
mp) me (1 1
1836) 0.9995 me
Como caso más extremo todavía, al discutir elmovimiento de un satélite artificial alrededor de laTierra podemos utilizar, con muy buena aproxima-ción, la masa del satélite artificial en lugar de lamasa reducida del sistema Tierra-satélite; estoequivale, naturalmente, a considerar el centro de laTierra como un centro de fuerzas fijo.
Consideraremos como último ejemplo el del átomo depositronio. El positronio es un "átomo" semejante al dehidrógeno, en el que en lugar de haber un protón hay unpositrón. El positrón es una partícula elemental que tiene lamisma masa que el electrón, pero con una carga eléctricapositiva, e+. La interacción coulombiana entre el positrón yel electrón en el átomo de positronio es igual a la existenteentre el protón y el electrón en el átomo de hidrógeno. Lamasa reducida del sistema (e+e-) es me/2, en tanto que la delsistema (pe-) es μ ≈ me. Este resultado sugiere que puedaexistir una correspondencia entre las líneas espectrales(niveles de energía) de los átomos de hidrógeno y de posi-tronio. Dicha suposición es correcta, como se ilustra en laFigura 18.5, en la que se muestran los niveles energéticospara ambos átomos. Así, el nivel fundamental del hidrógenocorresponde a -13.6 eV, en tanto que el del positronio es-6.8 eV.
§18.5. Momento angular y energía cinética.- La separación entre el movi-miento del centro de masa y el movimiento relativo puede extenderse a lasexpresiones del momento angular y de la energía cinética del sistema de dos partícu-las, haciendo aparecer la masa reducida del sistema. A partir de las expresiones[18.31], por derivación respecto al tiempo, encontraremos la relación existente entrela velocidad de cada partícula (en un referencial dado), la velocidad del centro demasa vcm (en ese mismo referencial) y la velocidad relativa v12 = v1 - v2:
[18.36]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
v1 vcmm2
m1 m2
v12 vcmμm1v12
v2 vcmm1
m1 m2
v12 vcmμm2v12
Sustituyendo [18.31] y [18.36] en las expresiones del momento angular y de la energíacinética del sistema en el referencial dado, esto es,

530 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
[18.37]L r1 × m1v1 r2 × m2v2 Ek1
2m1v
21
1
2m2v
22
se obtiene finalmente, después de algunas operaciones,
[18.38]L rcm × M vcm r12 × μ v12
[18.39]Ek1
2M v 2
cm1
2μ v 2
12
de modo que tanto el momento angular como la energía cinética del sistema puedensepararse en dos partes: una parte asociada con el movimiento del centro de masa yotra parte asociada con el movimiento relativo entre las dos partículas. Los términosrcm×Mvcm y Mv2
cm/2 representan, respectivamente, el momento angular y la energíacinética orbitales o externos, ya definidos en la lección anterior. Los términos r12×μv12
y μv212/2 se corresponde con el momento angular y la energía cinética intrínseca o
internos, esto es, medidos en el referencial del centro de masa. Obsérvese que elmomento angular intrínseco es el mismo que el de una sola partícula de masa μ,velocidad v12 y vector de posición r12; en su expresión tan sólo aparecen lasmagnitudes que describen el movimiento relativo entre las partículas. Análogasconsideraciones podemos hacer para la energía cinética interna del sistema de dospartículas.
Los resultados anteriores deben tenerse en cuenta al calcular, por ejemplo, el momento angulary la energía interna del átomo de hidrógeno. Deberemos utilizar la distancia rep y la velocidad vep
del electrón relativas al protón, así como la masa reducida μep del sistema protón-electrón. De esemodo, tendremos
[18.40]Lint rep × μepvep Eint
12μepv
2ep
e 2
4π 0rep
donde el término -e2/4π 0rep corresponde a la energía potencial interna (electrostática) del sistemaelectrón-protón.
La cantidad de movimiento total del sistema de dos partículas es
[18.41]p m1v1 m2v2 Mvcm
y en su expresión no aparecen ni μ ni v12.Puede resultar interesante calcular la cantidad de movimiento de cada una de las
partículas en el SCM. Los vectores de posición (r1′ y r2′) y las velocidades (v1′ y v2′)de las partículas respecto al centro de masa vienen dados por
[18.42]
⎧⎪⎪⎨⎪⎪⎩
r1′ r1 rcmm2
m1 m2
r12μm1
r12
r2′ r2 rcmm1
m1 m2
r12μm2
r12

§18.5.- Momento angular y energía cinética. 531
[18.43]
⎧⎪⎪⎨⎪⎪⎩
v1′ v1 vcmm2
m1 m2
v12μm1
v12
v2′ v2 vcmm1
m1 m2
v12μm2
v12
por lo tanto, las partículas se mueven en direcciones opuestas en el SCM y lascantidades de movimiento de cada partícula en el SCM son
[18.44]p1′ m1v1′ μv12 p2′ m2v2′ μv12
de modo que las partículas se mueven en el SCM con cantidades de movimientoiguales y opuestas; i.e., la cantidad de movimiento total en el SCM es nula.
§18.6. Oscilaciones de dos cuerpos.- En la Lección 13 (§13.7) hemosestudiado las oscilaciones de una masa m unida a uno de los extremos de un muellede constante elástica k, unido por su otro extremo a una pared. Naturalmente la paredestá unida rígidamente a la Tierra, de modo que el sistema es, en realidad, un sistemade dos cuerpos unidos mediante un muelle, en el que uno de los cuerpos (la Tierra)tiene una masa efectiva infinita. Esta es la razón por la que se puede analizar elmovimiento como si de un sólo cuerpo (la masa m) se tratase.
Sin embargo, nos encontramos a menudo con sistemas oscilantes de dos cuerposde masas comparables, de modo que no podemos considerar uno de ellos como demasa infinita. Esta situación se presenta, por ejemplo, en las moléculas diatómicas,tales como el O2, el CO, el ClH, ..., en las que los átomos que las constituyen puedenoscilar a lo largo de la recta que los une. El acoplamiento entre los átomos de lamolécula es de naturaleza electromagnética; sin embargo, podemos imaginar, almenos en una primera aproximación (cuando es muy pequeña la amplitud de lasoscilaciones), que el acoplamiento obedezca la ley de Hooke, como si los átomosestuviesen conectados mediante pequeños muelles ideales sin masa.
Nos proponemos resolver, como paradigma de las oscilaciones de dos cuerpos,el problema de las oscilaciones de dos partículas, de masa respectivas m1 y m2,conectadas mediante un muelle ideal (extensor-compresor y sin masa), de constantede fuerza k, alineado a lo largo del eje x. Los extremos del muelle se localizanmediante las correspondientes coordenadas x1(t) y x2(t), como se muestra en laFigura 18.6a, de modo que la longitud del muelle en un instante dado t es x12 = x1 - x2.Si es l0 la longitud natural del muelle (sin deformar), la deformación del mismo enun instante dado, i.e.,
[18.45](x1 x2) l0 x12 l0
será positiva o negativa según que el muelle esté estirado o comprimido.En la Figura 18.6b representaremos el sistema oscilante en un instante genérico, en
que el muelle está estirado; las fuerzas que actúan sobre las masas m1 y m2 son

532 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
Figura 18.6
[18.46]F1 k (x1 x2 l0) k (x12 l0)
F2 k (x1 x2 l0) k (x12 l0)
i.e., iguales en módulo, pero en sentidos opuestos (tercera ley de Newton).Aunque podemos plantear el problema de las oscilaciones de dos cuerpos
recurriendo a la formulación general (leyes del movimiento), preferimos hacer usodirecto de los conceptos y expresiones desarrollados en esta lección, separando elmovimiento del centro de masas y el movimiento relativo. Así, las ecuacionesdiferenciales [18.30] se escriben en la forma
[18.47](m1 m2) xcm 0 μ x12 F1
ya que Fext=0 , donde μ es la masa reducida del sistema de dos cuerpos y F1 vienedado por [18.46]
La primera ec. dif. de [18.47] nos conduce inmediatamente a que xcm=0, de modoque xcm=cte (=0), por lo que el centro de masas, si estaba en reposo, permanecerá enreposo.
La segunda ec. dif. de [18.47], en la que sustituimos [18.46], se escribe en la forma
[18.48]μ x12 k (x12 l0) ⇒ x12
kμx12
kμl0
que representa un m.a.s. cuya frecuencia angular es
[18.49]ω kμ
k (m1 m2)
m1 m2
resultando que el sistema oscilante de dos cuerpos tiene la misma frecuencia yperiodo que el constituido por un solo cuerpo de masa μ, conectado mediante unmuelle semejante a una pared fija, como se ilustra en la Figura 18.6b. Dicho de otromodo, en el sistema de dos cuerpos, una de las partículas se mueve respecto a la otra(movimiento relativo) como si esta segunda estuviese fija y la primera tuviese unamasa igual a la masa reducida μ.
El movimiento relativo está definido por la función

§18.6.- Oscilaciones de dos cuerpos. 533
[18.50]x12 l0 A12 sen(ωt ψ)
como el lector puede comprobar fácilmente. Los parámetros A12 y ψ, que representanrespectivamente la amplitud y la fase inicial de las oscilaciones relativas se evalúana partir de las condiciones iniciales.
Ejemplo II.- Supongamos que separamos los dos bloques de la Figura 18.6 de modo que el muelleexperimente un alargamiento que sea una fracción f de su longitud natural y que, a continuación,los abandonamos partiendo del reposo. Determinar el movimiento de cada uno de los dos bloques.
Las condiciones iniciales, esto es, para t=0, son:
[18.51]x12(0) l0 f l0 (1 f) l0 x12(0) 0
Entonces, derivando la expresión [18.50] respecto del tiempo, obtenemos
[18.52]
⎧⎪⎨⎪⎩
x12 l0 A12 sen(ωt ψ)x12 ω A12 cos(ωt ψ)
y, teniendo en cuenta las condiciones iniciales, será
[18.53]
⎧⎪⎨⎪⎩
l0 A12 senψ l0 f l0 ⇒ A12 senψ f l0 ⇒ A12 ± f l0
ω A12 cosψ 0 ⇒ ψ ± π2
de modo que, en cualquier caso, es
[18.54]x12 l0 f l0 sen(ω t π
2) l0 f l0 cos ω t
o sea, un movimiento (relativo) armónico simple de amplitud A12=fl0.
Puesto que el centro de masas permanece estacionario, referiremos el movimiento de cada unode los dos cuerpos al centro de masas. Obtenemos las coordenadas x1′(t) y x2′(t), a partir de [18.42],con xcm=0; i.e.,
[18.55]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
x1′m2
m1 m2
x12
⎛⎜⎜⎝
⎞⎟⎟⎠
m2 l0m1 m2
m2 f l0m1 m2
cos ωt
x2′m1
m1 m2
x12
⎛⎜⎜⎝
⎞⎟⎟⎠
m1 l0m1 m2
m1 f l0m1 m2
cos ωt
de modo que los dos cuerpos oscilan en contrafase, con amplitudes
[18.56]A1
m2 f l0m1 m2
A2
m1 f l0m1 m2
⇒A1
A2
m2
m1
i.e., inversamente proporcionales a las masas respectivas.

534 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
§18.7. Movimiento en el Sistema Solar.- En el borrador de de Motu, escritopor Isaac NEWTON, probablemente a finales de 1684, se discute el movimientoplanetario a través de la fuerza centrípeta dirigida hacia uno de los focos de unaelipse, siguiendo el método que le había sugerido Robert HOOKE. En dicho borradorse concluye con el siguiente escolio:
"Por consiguiente, los planetas mayores giran en elipses que tienen un foco en el centro del Sol,y los radios trazados desde el Sol describen áreas proporcionales a los tiempos, enteramentecomo lo describió Kepler ..."
Sin embargo, Newton no continuó creyendo en estas afirmaciones durante muchotiempo, pues pronto comprendió que no eran estrictamente correctas. Newtoncomprendió bien pronto que tan sólo había probado que la ley de las órbitas elípticasy la ley de las áreas se debían satisfacer para una masa puntual que se mueve en uncampo de fuerzas centrales, atraída hacia un centro de fuerza fijo; esto es, para unsistema de un cuerpo. Pero tuvo que reconocer que el sistema de un cuerpo nocorresponde a la situación física real, sino que tan sólo representa una simplificaciónartificial que se introduce en el problema real porque así es más fácil de analizarmatemáticamente.
El sistema de un cuerpo representa a la Tierra como una masa puntual y al Solcomo a un centro de atracción inmóvil. Pero Newton sabía que si el Sol atrae a laTierra, ésta debe atraer al Sol con una fuerza de igual magnitud. En estascondiciones, la Tierra no puede desplazarse en una órbita elíptica simple, alrededordel Sol; más bien, tanto el uno como la otra deberán moverse alrededor del centrode masa del sistema Sol-Tierra. El problema es evidentemente el de un sistema dedos cuerpos.
Considerando el sistema Sol-Tierra como un sistema de dos cuerpos que semueven bajo su atracción gravitatoria mutua, la ecuación del movimiento relativodeberá escribirse en la forma
[18.57]μ d2rdt 2
GmSmT
r 2e r G
μ (mS mT)
r 2e r
donde mS, mT y μ representan, respectivamente, la masa del Sol, la masa de la Tierray la masa reducida del sistema Sol-Tierra, r es el vector de posición relativo (de laTierra respecto al Sol) y er es el versor correspondiente. La ecuación anterior esidéntica a la ecuación del movimiento de una partícula de masa μ que se muevealrededor de una masa inmóvil mS + mT. Estamos pues en condiciones de introducirlas correcciones que habíamos anunciado al final del artículo §12.11, cuandoestudiábamos el movimiento de una partícula en un campo de fuerzas centralesinversamente proporcionales al cuadrado de la distancia, para tener en cuenta que enlas situaciones físicas reales, en las que intervienen al menos dos cuerpos, ningunode los dos cuerpos estará realmente inmóvil. Así, por ejemplo, la tercera ley deKepler para órbitas elípticas deberá escribirse en la forma
[18.58]T 2 4π2
Ga 3
mS mT
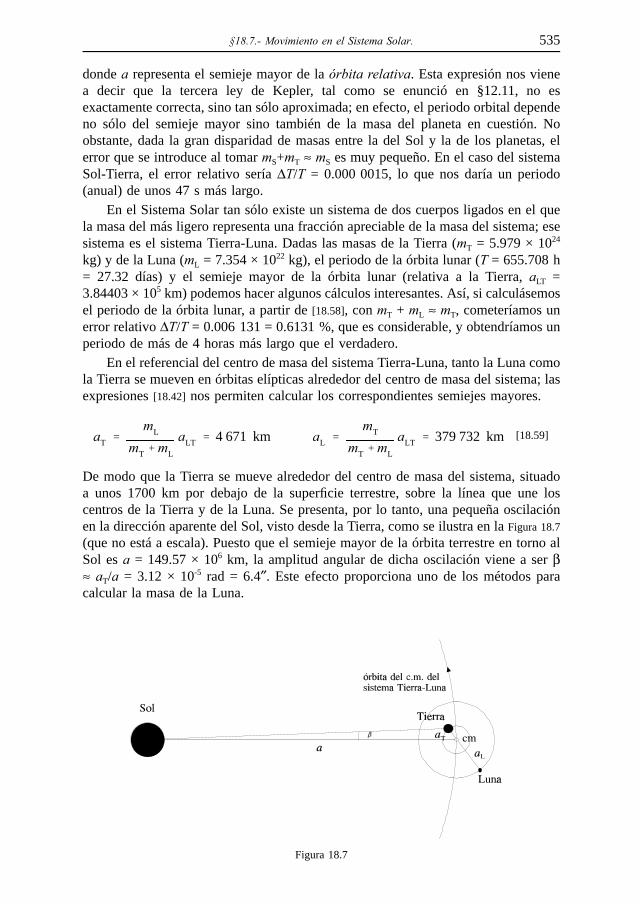
§18.7.- Movimiento en el Sistema Solar. 535
donde a representa el semieje mayor de la órbita relativa. Esta expresión nos vienea decir que la tercera ley de Kepler, tal como se enunció en §12.11, no esexactamente correcta, sino tan sólo aproximada; en efecto, el periodo orbital dependeno sólo del semieje mayor sino también de la masa del planeta en cuestión. Noobstante, dada la gran disparidad de masas entre la del Sol y la de los planetas, elerror que se introduce al tomar mS+mT ≈ mS es muy pequeño. En el caso del sistemaSol-Tierra, el error relativo sería ΔT/T = 0.000 0015, lo que nos daría un periodo(anual) de unos 47 s más largo.
En el Sistema Solar tan sólo existe un sistema de dos cuerpos ligados en el quela masa del más ligero representa una fracción apreciable de la masa del sistema; esesistema es el sistema Tierra-Luna. Dadas las masas de la Tierra (mT = 5.979 × 1024
kg) y de la Luna (mL = 7.354 × 1022 kg), el periodo de la órbita lunar (T = 655.708 h= 27.32 días) y el semieje mayor de la órbita lunar (relativa a la Tierra, aLT =3.84403 × 105 km) podemos hacer algunos cálculos interesantes. Así, si calculásemosel periodo de la órbita lunar, a partir de [18.58], con mT + mL ≈ mT, cometeríamos unerror relativo ΔT/T = 0.006 131 = 0.6131 %, que es considerable, y obtendríamos unperiodo de más de 4 horas más largo que el verdadero.
En el referencial del centro de masa del sistema Tierra-Luna, tanto la Luna comola Tierra se mueven en órbitas elípticas alrededor del centro de masa del sistema; lasexpresiones [18.42] nos permiten calcular los correspondientes semiejes mayores.
[18.59]aT
mL
mT mL
aLT 4 671 km aL
mT
mT mL
aLT 379 732 km
De modo que la Tierra se mueve alrededor del centro de masa del sistema, situado
Figura 18.7
a unos 1700 km por debajo de la superficie terrestre, sobre la línea que une loscentros de la Tierra y de la Luna. Se presenta, por lo tanto, una pequeña oscilaciónen la dirección aparente del Sol, visto desde la Tierra, como se ilustra en la Figura 18.7
(que no está a escala). Puesto que el semieje mayor de la órbita terrestre en torno alSol es a = 149.57 × 106 km, la amplitud angular de dicha oscilación viene a ser β≈ aT/a = 3.12 × 10-5 rad = 6.4″. Este efecto proporciona uno de los métodos paracalcular la masa de la Luna.

536 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
El sistema de dos cuerpos Tierra-Luna se encuentra en el campo gravitatoriosolar, de modo que actúan fuerzas externas sobre el mismo. Dadas las dimensionesdel sistema Tierra-Luna el campo gravitatorio solar puede considerarse uniforme, yse satisface la relación [18.28]. En consecuencia, en el referencial en que el Sol estáen reposo, el centro de masa del sistema Tierra-Luna se mueve en una órbita elípticaalrededor del Sol y este movimiento se superpone al de los dos cuerpos alrededor desu centro de masa. En la aproximación que estamos considerando, ambos tipos demovimiento, descritos respectivamente por [18.30a] y [18.30b] están completamenteseparados, y no puede haber transferencia de momento angular o de energía de unoa otro. Sin embargo, se presentarán pequeños efectos debidos a la falta deuniformidad del campo gravitatorio solar y a la presencia de los demás planetas.Estas pequeñas desviaciones reciben el nombre genérico de perturbaciones.
Problemas
18.1.- Un vagón de carga, abierto por su partesuperior, pesa 10 t y se mueve libremente, sinrozamientos apreciables, sobre una vía recta anivel. Comienza a llover intensamente, cayen-do la lluvia verticalmente sobre el terreno. Elvagón está vacío inicialmente y se mueve conuna velocidad de 3.6 km/h. ¿Cuál será lavelocidad del vagón después de haber recorri-do lo suficiente como para recoger una tonela-da de agua? ¿Qué suposiciones ha debido Vd.hacer para llegar a ese resultado?
18.2.- Se coloca un recipiente sobre el plato deuna balanza de resorte y se ajusta ésta paraque marque cero cuando el recipiente estávacío. Entonces se vierte agua dentro delrecipiente, en chorro continuo, a razón de100 cm3 por minuto, desde una altura de 1 m.a) Expresar la lectura de la balanza en funcióndel tiempo desde el instante en que empe-zamos a verter agua. b) ¿Cuánto marcará labalanza cuando se hayan recogido 500 cm3 deagua?
18.3.- Un fusil ametrallador dispara balas de50 g con una velocidad de 1200 m/s. Calcularel ritmo máximo de disparo para que la fuerzamedia de retroceso no supere los 300 N.
18.4.- Un hombre, que junto con su rifle pesa70 kg, lleva patines y dispara su rifle en direc-ción horizontal. Cada proyectil tiene una masade 30 g y sale con una velocidad de 800 m/s.
Supónganse despreciables los rozamientos.a) ¿Cuál será la velocidad del hombre despuésde efectuar 10 disparos? b) Supongamos quelos diez disparos se hayan realizado en 10 s,¿cuál es el valor de la fuerza media que se haejercido sobre el hombre?
18.5.- Cinta transportadora. Desde una tolva
Prob. 18.5
estacionaria cae continuamente material sobreuna cinta transportadora, a un ritmo constanteα = dm/dt. Antes de la caída del material, lacinta se movía con una velocidad constante v.a) ¿Qué fuerza adicional se requiere para quela cinta continúe moviéndose con la mismavelocidad v? b) Calcular la potencia adicionalque debe suministrar el motor que arrastra a lacinta. c) Demostrar que la potencia necesariapara mantener la cinta en movimiento es eldoble del ritmo con que aumenta la energíacinética del sistema. ¿Qué ha sido de la mitadsobrante de la potencia suministrada?

Problemas 537
18.6.- Los dos bloques
Prob. 18.6
de la figura tienen ini-cialmente la misma masam0 y se encuentran enreposo. El bloque de laizquierda es un recipienteque cont iene unacantidad de agua igual al90% de su masa inicial.En el instante t=0, dichorecipiente comienza aexpulsar agua por subase inferior, con unavelocidad constante v0
relativa al recipiente, conun flujo constante igual aα (masa/tiempo). (a) De-mostrar que, para que la cuerda esté siempretensa, deberá ser αv0≤0.2m0g. (b) En el su-puesto de que se cumpla la relación anterior,calcular la velocidad final del sistema en elinstante en que se haya expulsado todo elagua.
18.7.- Dos largas barcazas se mueven paralela-mente entre sí y en la misma dirección sobrela superficie de un lago de aguas tranquilas,con velocidades respectivas de 14.4 km/h y 18km/h. cuando están pasando la una junto a laotra, se palea carbón desde la más lenta a lamás rápida, a un ritmo de 800 kg/min, endirección transversal a las barcazas. Suponien-do que las fuerzas de fricción entre las barca-zas y el agua no dependan del peso de éstas,¿qué potencia adicional deberán suministrar losmotores de cada barcaza para mantenerconstantes las velocidades?
18.8.- Una partícula de masa m0 se mueve a lolargo del eje x, en la dirección positiva dedicho eje, con una velocidad v0. Cuandoalcanza la posición x = 0 penetra en un mediomaterial, del que va incorporando masa enproporción a la distancia recorrida en dichomedio. a) Expresar la posición, masa y veloci-dad de la partícula en función del tiempo.b) Expresar la disipación de energía en fun-ción del tiempo y del espacio recorrido. Expli-car dicha disipación de energía.
18.9.- Una gota de agua de lluvia tiene unamasa inicial m0 y cae partiendo del reposo.Durante su caída, el vapor de agua atmosféricova condensándose sobre la gota, a un ritmoconstante de α unidades de masa por unidadde tiempo. Despreciando la resistencia del aire,expresar la distancia de caída de la gota enfunción del tiempo.
18.10.- En 1905, Einstein llegó a la conclusiónde que la masa ponderable "tangible" de una
partícula, cargada o no, se incrementa con suvelocidad de acuerdo con la expresión
mm0
1 v 2
c 2
donde m0 es la llamada masa en reposo, y mes la llamada masa relativista, esto es, la masade la partícula cuando se mueve con unavelocidad v respecto del observador y c es lavelocidad de la luz.
Consideremos una partícula sobre la queactúa una fuerza F (constante o no ) en lamisma dirección que su velocidad. a) A partirde la expresión relativista de F = d(mv)/dt,demostrar que
F ds mv dv v 2 dm
donde ds es un desplazamiento elemental.b) Demostrar que el trabajo realizado pordicha fuerza puede expresarse en la forma
W ⌡⌠F ds (m m0) c
2
e interpretar este resultado.
18.11.- Un cohete está montado horizontal-
Prob. 18.11
mente sobre una vagoneta experimental.Supongamos que la resistencia que presenta elaire al movimiento del sistema cohete-vagone-ta sea directamente proporcional a su veloci-dad, que el combustible se quema a un ritmoconstante α (masa/tiempo) y que la velocidadde expulsión de los gases respecto del cohete(w) sea constante. a) Obtener la velocidad delsistema cohete-vagoneta en función del tiempo.b) Determinar la velocidad del sistema en elinstante en que se acaba el combustible.
18.12.- Un cohete, cuyo peso es 5 t, estápreparado para ser disparado verticalmente. Sila velocidad con que los gases son expulsadosrespecto al cuerpo del cohete es de 800 m/s:a) ¿Qué masa de gas debe ser expulsada porsegundo para suministrar un empuje inicial quecontrarreste el peso del cohete? b) ¿Ídem para

538 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
que el cohete despegue con una aceleracióninicial de 29.4 m/s2.
18.13.- Un cohete cuyo peso total es 5 kg, delos que el 85% corresponden al combustible,expele los productos de combustión a un ritmoconstante de 0.5 kg/s, con una velocidadrelativa al cohete de 400 m/s. El cohete esdisparado verticalmente hacia arriba, partiendodel reposo. a) Calcular la velocidad y la alturaalcanzada por el cohete en el instante en quese agota el combustible. b) Calcular la máximaaltura alcanzada por el cohete. (Despreciar laresistencia del aire y considerar constante elvalor de la aceleración gravitatoria g).
18.14.- En un cohete de dos secciones, laprimera sección se desprende una vez se haagotado su combustible y, acto seguido, seenciende la segunda sección. El peso total dela primera sección es 40 t, de las que 36 t sonde combustible; el peso total de la segundasección es 2 t, de las que 1.8 t son de combus-tible. El cohete tiene como misión acelerar unacarga útil de 300 kg. El combustible es capazde hacer que los gases de combustión salgancon una velocidad de 2400 m/s respecto alcuerpo del cohete. Despreciando los efectosgravitatorios (que son pequeños si el ritmo deconsumo es grande) calcular: a) la velocidaddel cohete cuando se agota la primera sección;b) la velocidad del cohete cuando se agota lasegunda sección. c) Supóngase que toda laprovisión de combustible del cohete de dossecciones se utilizase en un cohete de una solasección del mismo peso (42 t + la carga útil).¿Cuál sería la velocidad del cohete al consu-mirse el combustible? Este problema ilustra laventaja de los cohetes de varias seccionessobre los de sección única; el resultado es devalidez general.
18.15.- Un avión a reacción viaja en vuelohorizontal con una velocidad de 540 km/h. Elreactor toma cada segundo 58.3 m3 de aire,que tienen una masa de 60 kg, que utiliza paraquemar 2 kg por segundo de combustible. Laenergía liberada en la combustión se empleaen comprimir los gases resultantes y en expul-sarlos hacia atrás con una velocidad de 1620km/h respecto al avión. Calcular el empuje yla potencia desarrollada por el reactor.
18.16.- Una cadena uniforme, de longitud L y
Prob. 18.16
masa M, se encuentra inicialmente en reposo,amontonada y enrollada sobre una superficiehorizontal. Tiramos verticalmente hacia arribade uno de los extremos de la cadena, de modoque cada eslabón de la cadena permanece enreposo hasta el instante en que comienza aelevarse y que la velocidad del extremo supe-
r i o r s e ac o n s t a n t e .a) Calcular lapotencia quedesarrolla lafuerza verti-cal aplicada.b ) ¿ Q u écantidad deesa potenciase disipa?¿ C ó m oexplica Vd. esa disipación de potencia?
18.17.- Supongamos ahora que vamos levan-tando la cadena del Problema 18.16 mediantela aplicación de una fuerza constante en unode sus extremos, cuyo módulo sea exactamenteigual al peso total de la cadena. a) Escribir laecuación diferencial del movimiento delextremo superior de la cadena mientras aúnquedan eslabones en reposo sobre el planohorizontal. b) Calcular la velocidad que tendráel último eslabón de la cadena en el instanteen que abandone el plano horizontal. c) Calcu-lar el trabajo realizado por la fuerza aplicadahasta el instante en que se pone en movimientoel último eslabón de la cadena, así como elaumento en su energía cinética y potencial.¿Es conservativo el sistema?
18.18.- Un núcleo de Uranio-238, que se en-cuentra en reposo en el sistema de laboratorio(SL), emite una partícula alfa de 4.1 MeV deenergía cinética. a) Calcular la velocidad de lapartícula alfa y la del núcleo de residual (eltorio-234). b) Calcular la energía cinética delnúcleo residual. c) ¿De dónde proviene laenergía cinética de los fragmentos?
1 8 . 1 9 . - D o s
Prob. 18.19
prismas trian-gu la re s , demasas M y m, yanchuras a y b,están en reposo,tal como seindica en lafigura adjunta,s o b r e u ntablero hori-zontal liso. Las superficies de contacto entrelos dos prismas son, también, perfectamentelisas. Determinar el retroceso del prisma infe-rior hasta el instante en que la cara vertical delprisma superior alcanza el tablero horizontal.Aplicación numérica: M = 10 kg, m = 2 kg,a = 40 cm y b = 10 cm.
18.20.- Cada uno de los componentes de unaestrella doble tiene una masa igual a la del Sol

Problemas 539
y están separados entre sí por una distancia deuna unidad astronómica. Suponiendo que elmovimiento relativo sea circular, ¿cuál será elperiodo de revolución?
18.21.- Supóngase una estrella doble asimétri-ca, y sean mS y 2mS las masas de sus compo-nentes (mS es la masa del Sol), que estánseparadas entre sí por una distancia de 1 U.A.(unidad astronómica). Describir el movimientodel sistema y calcular el periodo de revolución.
18.22.- Calcular la separación entre el electróny el positrón en el átomo de positronio, sabien-do que la energía del estado fundamental delmismo es -6.8 eV.
18.23.- Dos deslizadores, cuyas masas respec-tivas son m y 2m, están colocados sobre uncarril de aire y unidos entre sí mediante unmuelle ligero de longitud natural l0 y constanteelástica k. Aproximamos los dos deslizadoreshasta que el muelle se comprime una distanciaD, y enseguida los abandonamos partiendo delreposo. a) Calcular la frecuencia de las oscila-ciones del sistema. b) Calcular la energía delas oscilaciones. ¿Cómo se reparte esa energíaentre los dos deslizadores? c) Determinar laamplitud de las oscilaciones de cada desliza-dor, así como sus respectivas velocidadesmáximas.
18.24.- Un carrito de masa M, provisto de Prob. 18.24pequeñas ruedas, oscila en torno al punto másbajo de un carril circular de radio R contenidoen un plano vertical, como se muestra en lafigura (a), con una amplitud A«R. Sobre uncarril horizontal, colocado justamente debajodel carril circular, se colocan otros dos carritosidénticos, de masa m cada uno de ellos, unidospor un muelle ligero comprimido, de constanteelástica k, como se muestra en el figura (a). Enel instante en que el carrito M pasa por elfondo del carril circular, se libera el sistema delos dos carritos inferiores, que comienzan aoscilar. El movimiento subsiguiente está repre-sentado, a intervalos de tiempo de cuartos deperiodo, en las figuras (b), (c), (d), y (e).¿Cuál es el valor de la masa m en función dela masa M?
18.25.- Demostrar que el sistema oscilanteconstituido por dos masas idénticas acopladasmediante un muelle ligero de constante elásticak es equivalente al que resulta de cortar elmuelle por la mitad de modo que cada una delas masas oscile independientemente respectoal centro de masa en el punto medio.
18.26.- Dos deslizadores, cuyas masas respec-tivas son m1 y m2, se encuentran inicialmente
en reposo sobre un carril de aire y estáninterconectados mediante un muelle de cons-tante elástica k y longitud natural l0. Repen-tinamente, se le imprime una velocidad v0 aldeslizador m1, en dirección hacia el deslizadorm2. a) Calcular la velocidad de cada deslizadoren el instante en que el muelle vuelva a quedarrelajado. b) Calcular la velocidad del centro demasa y la frecuencia de las oscilacionesrelativas. c) Describir detalladamente elmovimiento del sistema en cada uno de loscasos siguientes: i) m1 = m2/2, ii) m1 = m2,iii) m1 = 2m2.
18.27.- Dos bloques, de masas respectivas m y3m, están colocados sobre una superficie hori-zontal lisa, y unidos mediante un muelle deconstante elástica k, como se muestra en lafigura adjunta. Se comprime el muelle, despla-zando la masa m hacia la izquierda una distan-cia D, manteniéndose la masa 3m en contactocon la pared vertical; entonces, se abandona elsistema partiendo del reposo. a) Describir elmovimiento subsiguiente del sistema. b) ¿Has-ta que punto se desplazará la masa m antes deque la masa 3m se ponga en movimiento?

540 Lec. 18.- Sistemas de masa variable. El problema de 2-cuerpos.
¿Cuál será su velocidad en ese instante?
Prob. 18.27
c) ¿Cuál será la velocidad del centro de masadel sistema cuando el bloque 3m deje de estaren contacto con la pared? d) Determinar lafrecuencia de las oscilaciones. ¿Cuál será laamplitud de las oscilaciones relativas? ¿Ídemde cada uno de los bloques?
18.28.- A partir de medidas espectroscópicasse ha determinado la frecuencia de la vibraciónfundamental de la molécula de hidrógeno (H2);el resultado es v0 = 1.3 × 1014 Hz. a) ¿Cuál esla constante elástica efectiva de las fuerzas deacoplamiento entre los dos átomos de hidróge-no? b) ¿Es razonable ese valor de la constanteelástica efectiva? Para averiguarlo, supóngaseque deformamos la molécula H2, cuyadistancia interatómica correspondiente alequilibrio es 0.74611 Å, en 0.5 Å. El trabajorealizado sobre la molécula será suficiente,probablemente, para romperla. Compárese elresultado así obtenido con la energía de enlacemolecular para el H2, que es de 104.18kcal/mol, y explíquese las hipótesis simplifica-doras que hemos necesitado hacer.
18.29.- En el análisis de las líneas espectralesasociadas con las vibraciones moleculares delmonóxido de carbono (CO) se ha encontradouna línea, asociada con la vibración fundamen-tal, cuya longitud de onda es 4.7 × 10-6 m (enel infrarrojo). a) Calcular la constante elásticaefectiva para la molécula de CO. b) Compro-bar la aceptabilidad del resultado anterior;utilizar para ello el mismo procedimiento queen el Problema 18.28. Datos para el CO:distancia interatómica r0 =1.13 Å, energía deenlace molecular (energía de disociación) ED =256.7 kcal/mol, m(12C) = 12 u, m(16O) = 16 u,1 u = 1.6605 × 10-27 kg.
18.30.- De acuerdo con P.M. MORSE (1929), laenergía potencial de una molécula diatómicaviene expresada aproximadamente por
Ep D [ 1 e a (r r0)2
]
donde D y a son dos constantes cuyos valorespueden determinarse a partir de datos espec-troscópicos, r es la distancia interatómica y r0
es la distancia interatómica correspondiente alequilibrio. a) Estudiar analíticamente la fun-ción Ep(r) y representarla gráficamente.b) ¿Cuál es el significado físico de la constan-te D? c) Expresar la constante elástica efectivak en función de a y D. d) La energía dedisociación de la molécula de Cl H es103.1 kcal/mol y la frecuencia de la vibraciónfundamental de dicha molécula es 8.7 ×1013 Hz. Con esos datos, evaluar las constantesa y D de la expresión de Morse para el 2Cl H.
18.31.- Entre dos átomos idénticos, de masa m,existe una fuerza atractiva que decrece comor-7 (fuerza de Van der Waals) y una fuerzarepulsiva que decrece como r-l, con l > 7.a) Demostrar que la energía potencial internade la molécula puede expresarse por
Ep
Ar 6
Br n
donde A y B son constantes. b) Estudiaranalíticamente el comportamiento de la fun-ción Ep(r), significando 2la importancia relati-va de cada término. Representar gráficamentela función Ep(r). c) Demostrar que la separa-ción de equilibrio entre ambos átomos es
r0
⎛⎜⎝
⎞⎟⎠
nB6A
1n 6
d) Demostrar que la energía de disociación dela molécula puede expresarse en la forma
D ⎛⎜⎝
⎞⎟⎠
n 6n
A
r 60
y que la constante efectiva es
k 6 nD
r 20
e) Demostrar que la frecuencia de las pequeñasoscilaciones moleculares es
ω2 12 nD
mr 20

19.- Colisiones.
§19.1. Colisiones (541); §19.2. Dinámica impulsiva de la partícula (543); §19.3. Colisionesfrontales. Coeficiente de restitución (545); §19.4. Colisiones oblicuas (549);§19.5. Descripción de la colisión en el referencial del centro de masa (551);§19.6. Transformación de ángulos (557); §19.7. Balance energético en las colisiones.Definición del Q (560); §19.8. Estudio de las colisiones en función del Q (565);§19.9. Algo más acerca de las colisiones elásticas (568); §19.10. Reacciones (573);§19.11. Umbral de reacción (575); §19.12. Ecuación del Q (576); Problemas (577)
§19.1. Colisiones.- Cuando dos o más partículas, o sistemas de partículas, seaproximan entre sí, sus interacciones mutuas alteran sus movimientos, y se produceun intercambio de cantidad de movimiento, de momento angular, de energía y,eventualmente, de masa; decimos, en un sentido amplio, que ha tenido lugar unacolisión o choque.
Haremos dos puntualizaciones respecto a la definición anterior. En primer lugar,
Figura 19.1
resaltaremos que en ella no se implica que las partículas o sistemas de partículascolisionantes hayan estado físicamente en contacto, en un sentido macroscópico,como ocurre en los choques entre dos bolas de billar o entre dos automóviles; lainteracción puede tener lugar a distancia, a través de un campo de fuerzas Figura 19.1.En segundo lugar, cuando nos referimos a un fenómeno de colisión o choque solemosentender que la interacción se produce cuando las partículas, o sistemas de partículas,están suficientemente próximas entre sí, y que es entonces cuando se producen loscambios medibles en sus movimientos,cambios que tienen lugar de un modobrusco, repentino, durante un intervalode tiempo que es muy breve en compa-ración con el que dura la observacióndel fenómeno.
Así, por ejemplo, consideremos dospartículas cargadas, tales como dos protones,o una partícula alfa y un núcleo atómico, quese aproximan rápidamente entre sí. Aunque lasfuerzas coulombianas que actúan entre ellastienen un alcance infinito, decrecenrápidamente conforme aumenta la distancia
Manuel R. Ortega Girón 541

542 Lec. 19.- Colisiones.
entre las partículas (con el cuadrado de la distancia). Así, podemos imaginar la interacción comosi estuviese limitada a un breve intervalo de tiempo, cuando las dos partículas se encuentran muypróximas la una de la otra. En este sentido, describimos el fenómeno como una colisión. En elmismo sentido, el movimiento de un cometa que se aproxima al sistema solar también podríaconsiderarse como una colisión; sin embargo, como el tiempo que dura la interacción es grande,es preferible no utilizar el término de colisión para describir este fenómeno.
Durante una colisión actúa una fuerza relativamente grande (la fuerza deinteracción mutua) sobre cada una de las partículas o sistemas de partículascolisionantes; pero dichas fuerzas tan sólo actúan durante un intervalo detiempo relativamente corto.
Estas fuerzas reciben el nombre de fuerzas impulsivas, y varían con el tiempo en unaforma tan rápida y compleja que por lo general resulta imposible su medida. La ideabásica que define a una colisión es que el movimiento de las partículas o sistemasde partículas colisionantes, o al menos el de una o uno de ellos, cambia bruscamentey que podemos establecer una separación relativamente precisa entre el antes de lacolisión y el después de la colisión.
En esta lección nos ocuparemos exclusivamente de las colisiones entre partículas,más concretamente de dos partículas en el estado inicial. Más adelante, en la Lec. 24,estudiaremos las colisiones entre cuerpos extensos. Comenzaremos estudiandoaquellas colisiones en las que las partículas son las mismas antes y después de lacolisión (dispersión o difusión) y concluiremos con aquellas colisiones en las quecambia la naturaleza de las partículas (reacciones).
En los experimentos1 sobre colisiones se conoce, generalmente, la naturaleza yel estado de movimiento (velocidad, energía cinética, ...) de las partículas antes dela colisión, ya que dichas características dependen de como se haya preparado elexperimento. Evidentemente, si conociéramos las fuerzas que actúan durante lacolisión sería posible predecir con toda exactitud el movimiento subsiguiente de laspartículas colisionantes. Pero, con frecuencia, o no conocemos en absoluto las fuerzasque actúan entre las partículas que colisionan, o el conocimiento que tenemos de talesfuerzas es muy incompleto. En estas condiciones tenemos que conformarnos conobservar el movimiento final de las partículas cuando éstas, después de la colisión,se encuentran muy lejos del lugar donde colisionaron.
Nuestro objetivo al estudiar las colisiones en esta lección será resolver elsiguiente problema: Conocidos los movimientos iniciales de las partículas colisionan-tes, ¿qué podemos averiguar acerca de sus movimientos finales, asumiendo que nosabemos nada acerca de las fuerzas que actúan durante la colisión?
1 El análisis de los datos provenientes de los experimentos sobre colisiones nos proporcionaráinformación muy valiosa acerca de las interacciones entre las partículas colisionantes. Hemosaprendido mucho acerca de la estructura nuclear y de las partículas elementales estudiando lascolisiones entre esas partículas; recordemos que fueron los experimentos de colisiones realizadospor el físico neozelandés Ernest RUTHERFORD (1871-1937), hacia 1910, los que hicieron posibleel descubrimiento de la estructura nuclear del átomo (§12.12). Esta es una de las razones por lasque los experimentos sobre colisiones tienen tanto interés para el físico.

§19.2.- Dinámica impulsiva de la partícula. 543
§19.2. Dinámica impulsiva de la partícula.- En el Capítulo III desarrollá-bamos lo que podemos llamar la Dinámica de Velocidad Continua de la partícula enla que considerábamos una fuerza F (o la resultante de un sistema de fuerzas)actuando sobre una partícula de masa m durante un intervalo de tiempo Δt, finito ymedible. El efecto de dicha fuerza es producir un cambio en la velocidad de lapartícula; dicho cambio viene expresado por la segunda ley de Newton, queescribiremos en la forma
[19.1]F dt dp mdv
que nos expresa el cambio elemental en la cantidad de movimiento de la partículadurante un intervalo de tiempo infinitesimal de actuación de la fuerza. Transcurridoun intervalo de tiempo finito, Δt, el cambio en la velocidad de la partícula viene dadopor
[19.2]Δv 1m⌡⌠
t0 Δt
t0
F dt
Las expresiones [19.1] y [19.2] nos permiten inferir que, para las fuerzas ordinarias,finitas, el cambio en la velocidad de la partícula tiende a cero, de forma continua,conforme se va haciendo más pequeño el intervalo de tiempo Δt considerado; i.e.,
[19.3]límΔt→0
Δv 1m
límΔt→0 ⌡
⌠t0 Δt
t0
F dt 0
Sin embargo, en ciertos procesos que encontramos en la Naturaleza, tales comolas colisiones, percusiones, explosiones, ... se observan variaciones finitas de lavelocidad durante intervalos de tiempo infinitesimales o, al menos, difícilmentemedibles. Las fuerzas que producen esos cambios bruscos en el estado demovimiento de los cuerpos son las llamadas fuerzas impulsivas, y sus efectos suelenrecibir el nombre de percusiones.
Ya hemos definido, en §7.7, el concepto de impulsión de una fuerza; estamagnitud física puede interpretarse como la efectividad de la fuerza para modificarel estado de movimiento de la partícula sobre la que actúa. Así, una fuerza muyintensa que actúe durante un corto intervalo de tiempo puede producir el mismoefecto sobre el movimiento de la partícula que una fuerza menos intensa que actúesobre la partícula un intervalo de tiempo más largo. El concepto de impulsión de unafuerza, que es general, se aplica fundamentalmente a las fuerzas impulsivas; laimpulsión producida por una fuerza impulsiva suele recibir el nombre de percusión,y la designaremos por Π. De acuerdo con el teorema de la cantidad de movimiento,la percusión producida por una fuerza será igual a la variación de la cantidad demovimiento de la partícula sobre la que actúa; esto es,
[19.4]Π limΔt→0⌡
⌠t0 Δt
t0
F dt Δp
Esta expresión exige que F →∞, a fin de que pueda producirse una variaciónfinita en la cantidad de movimiento de la partícula, y en definitiva en su velocidad,

544 Lec. 19.- Colisiones.
durante un intervalo de tiempo infinitesimal. Estrictamente hablando, esta situaciónno se presenta nunca en la Naturaleza; si embargo, en muchos casos constituye unaexcelente aproximación de lo que realmente ocurre. Este resultado constituye laPrimera Ley del Movimiento Impulsivo:
1. Cuando sobre una partícula actúan simultáneamente las fuerzas ordinariasy las fuerzas impulsivas, despreciaremos las primeras durante el tiempo deactuación de las segundas.
Como el tiempo de actuación de las fuerzas impulsivas es muy breve, tomaremoscomo velocidad de la partícula durante la percusión el valor medio de las velocidadesantes y después de la percusión, esto es (v+v′)/2, resultando que el desplazamientode la partícula durante la percusión es
[19.5]Δr v v′2
Δt
que tiende a cero cuando Δt→0. Este resultado constituye la Segunda Ley delMovimiento Impulsivo:
2. La partícula no cambia de posición durante el tiempo de actuación de lasfuerzas impulsivas.
La Dinámica Impulsiva de la partícula se interesa tan sólo en los cambios develocidad de la partícula sometida a las fuerzas impulsivas, sin preocuparse delcálculo de la intensidad de dichas fuerzas (que se suponen muy intensas), ni delcálculo de los intervalos de tiempo de actuación de las mismas o de losdesplazamientos de la partícula durante la percusión (que se suponen infinitesimales).
Frente a la Dinámica de la velocidad continua, que admite como ecuaciónfundamental la Segunda Ley de Newton,
[19.6]F m dvdt
la Dinámica Impulsiva de la partícula admite como ecuación fundamental
[19.7]Π m Δv
donde la percusión Π es una magnitud vectorial, definida como en [19.4], que mideel cambio en la cantidad de movimiento de la partícula durante la actuación de lafuerza impulsiva.
Comparando las expresiones [19.6] y [19.7], veremos la forma de pasar de laDinámica de Velocidad Continua a la Dinámica Impulsiva; bastará con sustituir losconceptos de fuerza por el de percusión y el de aceleración por el de cambio develocidad. En la Dinámica de Velocidad Continua está implicado el métododiferencial (diferencias infinitesimales); en la Dinámica Impulsiva se opera por elmétodo de diferencias finitas.
El cambio que experimenta la energía cinética de la partícula durante lapercusión será igual al trabajo realizado por la fuerza impulsiva; i.e.,
§19.2.- Dinámica impulsiva de la partícula. 545
[19.8]ΔEk
12
m (v′2 v 2) 12
m (v′ v) (v′ v) m Δv (v′ v)2
de modo que, de acuerdo con [19.7], resulta
[19.9]Wimp ΔEk Π v v′2
es decir:
la energía cinética adquirida durante la percusión es igual al producto de lapercusión por la media aritmética de las velocidades de la partícula antes ydespués de ella (i.e., la velocidad media).
Por último, resaltaremos que el movimiento discontinuo, característico de laDinámica Impulsiva, entraña, en general, una disipación de energía, en muchos casosen forma de calor. Tendremos en cuenta esa disipación de energía cuando apliquemosel principio de conservación de la energía a problemas de Dinámica Impulsiva, talescomo los problemas de choque, explosiones y desintegraciones.
§19.3. Colisiones frontales. Coeficiente de restitución.- Comenzaremos elestudio de las colisiones entre dos partículas considerando éstas como si fuesenesferas lisas. Naturalmente, en esta representación ignoraremos los posiblesmovimientos de rotación de cada esfera, tanto antes como después de la colisión. Lascolisiones en las que intervienen rotaciones de los cuerpos colisionantes (colisionesentre cuerpos extensos) serán estudiadas en la Lección 24.
Supongamos que las dos esferas, de masas m1 y m2, se estén moviendoinicialmente sobre la recta que une sus centros, con celeridades v1 y v2, respectiva-mente, de modo que realicen una colisión frontal; en estas condiciones, después dela colisión los centros de las dos esferas continuarán moviéndose sobre la mismarecta. Adoptaremos un convenio de signos sobre dicha recta, que nos exonerará deluso de la notación vectorial; en la Figura 19.2 hemos adoptado como sentido positivoel que va de izquierda a derecha. Cuando se inicia el contacto entre las dos esferas,en el instante t=ta, la esfera m1 comienza a ejercer una fuerza F sobre la esfera m2,y la esfera m2 comienza a ejercer una fuerza -F sobre la esfera m1 (principio de laacción y la reacción). Evidentemente, estas fuerzas actúan a lo largo de la recta queune los centros de las dos esferas y tienden a separarlas. La fuerza F (y la -F) no esconstante; tiene una intensidad (módulo) nula para t<ta; a partir del instante t=ta vaaumentando su intensidad, de una forma más o menos compleja; alcanza su valormáximo en un cierto instante t=τ, cuando es máxima la deformación de las dosesferas (Figura 19.2c); a partir de ese instante va disminuyendo la intensidad de lafuerza F, hasta hacerse nula cuando finalmente, en el instante t=tb, las dos esferasdejan de estar en contacto mutuo. En la Figura 19.2 hemos representado la colisión enun diagrama de cinco instantáneas; obsérvese que en el instante t=τ (de máximadeformación) la distancia entre los centros de las esferas es mínima y que ambasesferas se mueven, en ese instante, con una velocidad común que designamos por v.Finalmente, a partir del instante t=tb, las dos esferas se separan y continúan

546 Lec. 19.- Colisiones.
moviéndose con velocidades respectivas2 v′1 y v′2.
Figura 19.2
En la Figura 19.3 se muestra una posible forma de variación de la fuerza impulsiva
Figura 19.3
F que actúa durante el intervalo de tiempo ta ≤ t ≤ tb que dura la colisión. El áreadelimitada por la curva F(t) y el eje de abscisas representa la impulsión o percusióntotal producida por dicha fuerza. Es conveniente descomponer la percusión total endos partes, correspondientes a las etapas ta ≤ t ≤ τ y τ ≤ t ≤ tb, que designaremos porΠ y Π′, respectivamente. La primera etapa corresponde a la aproximación, durante
la colisión, de los centros de las dos esfe-ras; la percusión correspondiente es lapercusión de compresión. La segunda etapacorresponde a la separación de los centrosde las esferas durante la colisión; lapercusión correspondiente es la percusiónde restauración. En general, estas dospercusiones no son iguales.
Nuestro propósito es expresar lasvelocidades de las esferas después de lacolisión (v′1 y v′2) en función de las velo-cidades antes de la colisión (v1 y v2). Para
ello, consideraremos las dos etapas de la colisión por separado. Aplicando la ec. fun-damental de la dinámica impulsiva [19.7] a cada una de las dos partículas, obtenemos
[19.10]Π m1v m1v1 Π m2v m2v2
de donde despejaremos v1 y v2; tenemos
2 En lo que sigue, designaremos sin prima y con prima todas las magnitudes físicas antes ydespués de la colisión, respectivamente.

§19.3.- Colisiones frontales. Coeficiente de restitución. 547
[19.11]v1 v Πm1
v2 v Πm2
de modo que la velocidad relativa v12 es
[19.12]v12 v1 v2
⎛⎜⎜⎝
⎞⎟⎟⎠
1m1
1m2
Π 1µΠ
Análogamente, durante la segunda etapa de la colisión (τ ≤ t ≤ tb), obtendremos
[19.13]Π ′ m1v1′ m1v Π ′ m2v2′ m2v
de donde [19.14]v1′ v Π ′m1
v2′ v Π ′m2
y la velocidad relativa v′12 después de la colisión es
[19.15]v12′ v1′ v2′⎛⎜⎜⎝
⎞⎟⎟⎠
1m1
1m2
Π ′ 1µΠ ′
En general, las percusiones de comprensión (Π) y de restauración (Π′) no soniguales, sino que están relacionadas en la forma
[19.16]Π ′ e Π
donde e es el llamado coeficiente de restitución que es, aproximadamente, unaconstante que tan sólo depende de la naturaleza y estructura de los cuerposcolisionantes, cuyo valor está contenido en el intervalo 0 ≤ e ≤ 1. Ahoracombinaremos las expresiones [19.12], [19.15] y [19.16] para obtener una relaciónimportante
[19.17]v12′v12
Π′Π
e ⇒ v1′ v2′ e (v1 v2)
expresión conocida como regla de HUYGENS-NEWTON, que nos dice que
la velocidad relativa entre las dos partículas colisionantes después de lacolisión es igual a e veces la velocidad relativa entre las mismas antes de lacolisión y de signo opuesto a ésta.
El coeficiente de restitución, cuando se refiere a una sustancia, constituye unamedida de sus propiedades elásticas; por esa razón suele llamársele tambiéncoeficiente de elasticidad. El coeficiente de restitución es una magnitud físicaadimensional y su valor, el mismo en todos los sistemas de unidades, estácomprendido entre cero y la unidad. A partir de la expresión [19.16], que nos haservido para definirlo, comprenderemos que el coeficiente de restitución es unamedida del grado en que los cuerpos recuperan su forma original después de lacolisión.
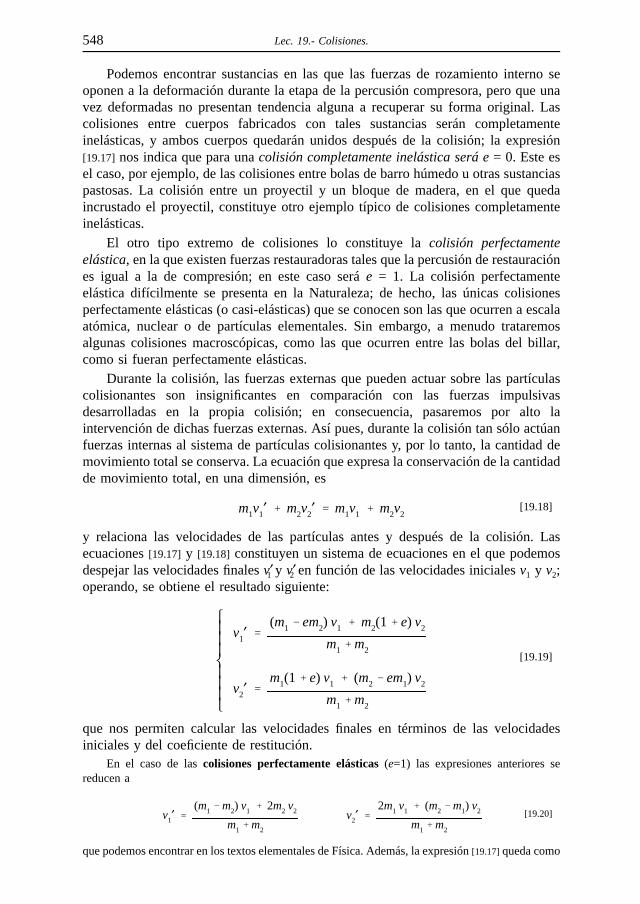
548 Lec. 19.- Colisiones.
Podemos encontrar sustancias en las que las fuerzas de rozamiento interno seoponen a la deformación durante la etapa de la percusión compresora, pero que unavez deformadas no presentan tendencia alguna a recuperar su forma original. Lascolisiones entre cuerpos fabricados con tales sustancias serán completamenteinelásticas, y ambos cuerpos quedarán unidos después de la colisión; la expresión[19.17] nos indica que para una colisión completamente inelástica será e = 0. Este esel caso, por ejemplo, de las colisiones entre bolas de barro húmedo u otras sustanciaspastosas. La colisión entre un proyectil y un bloque de madera, en el que quedaincrustado el proyectil, constituye otro ejemplo típico de colisiones completamenteinelásticas.
El otro tipo extremo de colisiones lo constituye la colisión perfectamenteelástica, en la que existen fuerzas restauradoras tales que la percusión de restauraciónes igual a la de compresión; en este caso será e = 1. La colisión perfectamenteelástica difícilmente se presenta en la Naturaleza; de hecho, las únicas colisionesperfectamente elásticas (o casi-elásticas) que se conocen son las que ocurren a escalaatómica, nuclear o de partículas elementales. Sin embargo, a menudo trataremosalgunas colisiones macroscópicas, como las que ocurren entre las bolas del billar,como si fueran perfectamente elásticas.
Durante la colisión, las fuerzas externas que pueden actuar sobre las partículascolisionantes son insignificantes en comparación con las fuerzas impulsivasdesarrolladas en la propia colisión; en consecuencia, pasaremos por alto laintervención de dichas fuerzas externas. Así pues, durante la colisión tan sólo actúanfuerzas internas al sistema de partículas colisionantes y, por lo tanto, la cantidad demovimiento total se conserva. La ecuación que expresa la conservación de la cantidadde movimiento total, en una dimensión, es
[19.18]m1v1′ m2v2′ m1v1 m2v2
y relaciona las velocidades de las partículas antes y después de la colisión. Lasecuaciones [19.17] y [19.18] constituyen un sistema de ecuaciones en el que podemosdespejar las velocidades finales v′1 y v′2 en función de las velocidades iniciales v1 y v2;operando, se obtiene el resultado siguiente:
[19.19]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
v1′(m1 em2) v1 m2(1 e) v2
m1 m2
v2′m1(1 e) v1 (m2 em1) v2
m1 m2
que nos permiten calcular las velocidades finales en términos de las velocidadesiniciales y del coeficiente de restitución.
En el caso de las colisiones perfectamente elásticas (e=1) las expresiones anteriores sereducen a
[19.20]v1′(m1 m2) v1 2m2 v2
m1 m2
v2′2m1 v1 (m2 m1) v2
m1 m2
que podemos encontrar en los textos elementales de Física. Además, la expresión [19.17] queda como
§19.3.- Colisiones frontales. Coeficiente de restitución. 549
[19.21]v1′ v2′ (v1 v2) ⇒ v12′ v12
de modo que la velocidad relativa entre las partículas cambia de signo. En el caso particular en quem1=m2 (colisión frontal entre partículas idénticas) serán
[19.22]v1′ v2 v2′ v1
de modo que las partículas intercambian sus velocidades.
Para el caso de las colisiones completamente inelásticas (e=0), de las expresiones [19.19] sesigue:
[19.23]v1′ v2′m1v1 m2v2
m1 m2
de modo que las dos partículas se mueven unidas con una velocidad (común) que es la del centrode masa de las dos partículas antes (y después) de la colisión. En este caso, la regla de Huygens-Newton se reduce a
[19.24]v1′ v2′ 0 ⇒ v1′ v2′ vcm
§19.4. Colisiones oblicuas.- Consideraremos ahora las colisiones no frontalesu oblicuas entre dos esferas perfectamente lisas. En la Figura 19.4 se esquematiza unacolisión de estas características en la que una esfera de masa m1 y radio R1, que semueve inicialmente con una velocidad v1, colisiona con otra esfera de masa m2 yradio R2, que se encuentra inicialmente en reposo. Suponer la segunda esfera enreposo no limitará en nada nuestro razonamiento, ya que siempre podemos utilizarun referencial inercial en el que una de las dos esferas esté inicialmente en reposo.Supongamos que la trayectoria rectilínea (extrapolada) de la esfera incidente pase auna distancia b del centro de la esfera que está inicialmente en reposo; dichadistancia b recibe el nombre de parámetro de impacto. Si el parámetro de impactoes cero (b = 0) la colisión es frontal y el movimiento de ambas esferas tendrá lugarsiempre a lo largo de la recta que une sus centros. Si b es mayor que la suma de losradios de las dos esferas, no se producirá colisión alguna. En cualquier otro caso lasvelocidades y las direcciones del movimiento de las esferas después de la colisióndependerán del valor del parámetro de impacto.
La regla de Huygens-Newton es aplicable para las componentes de lasvelocidades a lo largo de la normal común a la superficie de las esferas en el puntode contacto; dicha normal común es simplemente la recta que une los centros de lasdos esferas durante la colisión.
Tomaremos una base vectorial apropiada definida por los ejes ξη: el eje ξ sobrela recta que une los centros de las esferas en el instante de la colisión; el eje ηnormal al anterior, como se muestra en la Figura 19.4. En esta base vectorial, la reglade Huygens-Newton nos dice que
[19.25]v1ξ′ v2ξ′ e (v1ξ v2ξ)
donde, en el ejemplo que estamos considerando, es v2ξ = 0. En lo que respecta a lascomponentes de las velocidades sobre el eje η, observaremos que las fuerzasimpulsivas que actúan durante la colisión son normales a las superficies en el punto

550 Lec. 19.- Colisiones.
de contacto (puesto que las superficies son lisas) de modo que no tiene componentes
Figura 19.4
sobre el eje η. En consecuencia, las componentes de las velocidades normales a lalínea de los centros no se alteran durante la colisión; i.e.,
[19.26]v1η′ v1η v2η′ v2η 0
Ejemplo I.- Colisión oblicua.- Consideremos una colisión oblicua entre dos esferas lisas, como seilustra en la Figura 19.4, en la que la esfera de masa m2 se encuentra inicialmente en reposo. Estasegunda esfera se moverá, después de la colisión, con una velocidad v′2 en una dirección queformará un ángulo θ2 con la dirección inicial del movimiento de la esfera incidente; dicho ánguloviene dado por:
[19.27]sen θ2
bR1 R2
Las componentes de las velocidades iniciales de ambas esferas en la base vectorial definidapor los ejes ξη son:
[19.28]⎧⎨⎩
v1ξ v1 cos θ2v1η v1 sen θ2
⎧⎨⎩
v2ξ 0v2η 0
Las componentes de las velocidades después de la colisión se pueden obtener a partir de [19.19]
para las correspondientes a la dirección ξ, y de [19.26] para las correspondientes a la dirección η;se obtiene
[19.29]
⎧⎪⎪⎨⎪⎪⎩
v1ξ′m1 em2
m1 m2
v1 cos θ2
v1η′ v1 sen θ2
⎧⎪⎪⎨⎪⎪⎩
v2ξ′m1(1 e)
m1 m2
v1 cos θ2
v2η′ 0
Podemos determinar el ángulo θ1 bajo el que sale dispersada la esfera incidente; calcularemosprimero θ1
*, esto es,

§19.4.- Colisiones oblicuas. 551
[19.30]tg θ1 tg(θ1 θ2)v1η′v1ξ′
m1 m2
m1 em2
tgθ2
y, finalmente, [19.31]θ1 θ1 θ2
Obsérvese que para una colisión perfectamente elástica (e = 1) entre dos esferas de la mismamasa es θ1
* = 90°, con independencia de sus radios y del parámetro de impacto [ 0 < b < (R1+R2)],o sea que las dos esferas se mueven en direcciones perpendiculares (θ1 + θ2 = 90°) después de lacolisión.
§19.5. Descripción de la colisión en el referencial del centro de masa.-Hasta aquí, hemos descrito las colisiones entre dos partículas en un referencialinercial arbitrario. No nos hemos preocupado por la elección de un referencialinercial concreto, como pueda serlo el referencial del laboratorio (SL), pues, comoya sabemos (§6.8; Principio de Relatividad de Galileo), todos los referenciales quese mueven con velocidad constante (sin rotación), unos con respecto a otros, sonequivalentes, y las leyes de la física presentan la misma forma en todos ellos. Encada caso elegiremos el referencial más conveniente para simplificar la resolución delproblema que tengamos planteado. Así, como ya hemos dicho en el artículo anterior,puede ser conveniente describir la colisión entre dos partículas en un referencial enel que una de las partículas se encuentre inicialmente en reposo; en muchasocasiones, ese referencial coincide con el referencial del laboratorio.
Efectivamente, esa situación es la que se presenta con mayor frecuencia en las experienciastípicas de la Física Nuclear en las que se bombardean núcleos en reposo en el referencial dellaboratorio con partículas aceleradas en algún tipo de acelerador de partículas (acelerador de Vander Graff, ciclotrón, ...) o emitidas por una sustancia radiactiva. En la célebre experiencia deRutherford, a la que ya nos hemos referido en varias ocasiones, se bombardearon los núcleos deoro de una delgada lámina de dicho metal con las partículas alfa emitidas por el Polonio; lasdesviaciones inesperadamente grandes que experimentan algunas partículas alfa condujeron a laaceptación del llamado modelo nuclear del átomo.
Aunque el referencial de laboratorio (SL) pueda parecernos el más natural paradescribir los fenómenos de colisiones, algunos aspectos de las mismas puedenanalizarse de un modo más sencillo en otros referenciales. En muchas ocasiones esconveniente estudiar el fenómeno en un referencial cuyo origen se encuentra en elcentro de masa de las partículas colisionantes y cuyos ejes mantienen una orientaciónfija respecto al referencial del laboratorio; tal referencial recibe el nombre dereferencial o sistema del centro de masa (SCM). En dicho referencial, la velocidaddel centro de masa será naturalmente cero; en esta circunstancia radica la granutilidad del SCM, y por ella se le suele denominar como referencial de cantidad demovimiento cero.
Aunque resulte más simple e informativo el análisis de las colisiones en elreferencial del centro de masa, los experimentos sobre colisiones se observan en elreferencial del laboratorio y las medidas se realizan en este referencial. Porconsiguiente, es importante que sepamos hacer las transformaciones de los valoresque toman las magnitudes físicas implicadas (velocidad, cantidad de movimiento,energía cinética, ... principalmente) de un referencial a otro.

552 Lec. 19.- Colisiones.
Ante todo, necesitamos establecer una notación que nos permita distinguir entrelos valores de una misma magnitud física medida en el referencial del laboratorio(SL) y en el referencial del centro de masa (SCM). En esta lección utilizaremos lanotación siguiente3:
magnitud S.L. S.C.M.
velocidad v u
cantidad de movimiento p q
energía cinética Ek Ec
ángulos θ ψ
La cantidad de movimiento total (p) y la velocidad del centro de masa (vcm), enel referencial del laboratorio, vienen definidas por
[19.32]p p1 p2 m1v1 m2v2 (m1 m2) v cm
de modo que [19.33]v cm
m1v1 m2v2
m1 m2
Puesto que durante la colisión tan sólo actúan fuerzas internas al sistema de las dospartículas colisionantes (ya que las fuerzas externas que pudieran actuar se consideraninsignificantes frente a las fuerzas impulsivas), la cantidad de movimiento total y lavelocidad del centro de masa permanecen constantes durante la colisión; i.e.,manyienen el mismo valor antes y después de la colisión.
Calcularemos ahora las velocidades y cantidades de movimiento de las partículascolisionantes en el referencial del centro de masa,
[19.34]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
u1 v1 v cm
m2
m1 m2
(v1 v2)μm1
v12
u2 v2 v cm
m1
m1 m2
(v2 v1)μm2
v12
donde μ es la masa reducida de las dos partículas colisionantes, siendo válidas estasexpresiones tanto antes como después de la colisión (añadir primas a las velocidades
3 Como se observará, hemos modificado la notación respecto a la utilizada en las leccionesanteriores. La razón de este cambio es que hemos reservado la notación "con prima" para referirnosa los valores de las magnitudes físicas "después" de la colisión. Seguiremos utilizando la notación"sin prima" para referirnos a los valores de las magnitudes físicas "antes" de la colisión. Nosserviremos de los subíndices "1" y "2" para referirnos a cada una de las partículas colisionantes enconcreto; cuando no especifiquemos, nos referiremos indistintamente a una u otra partícula o biena la cantidad de movimiento o a la energía cinética totales del sistema de dos partículas.

§19.5.- Descripción de la colisión en el referencial del centro de masa. 553
de las partículas). Obsérvese que las partículas se mueven siempre en direccionesopuestas en el referencial del centro de masa.
Las cantidades de movimiento de cada partícula en el SCM son
[19.35]q1 m1u1 μ v12 q2 m2u2 μ v12
resultando que las partículas se mueven en el SCM con cantidades de movimientoiguales y opuestas. La cantidad de movimiento total en dicho referencial es cero:
[19.36]q q1 q2 0 ⇒ q1 q2
Análogamente, después de la colisión la cantidad de movimiento total en el SCMsigue siendo cero:
[19.37]q′ q1′ q2′ 0 ⇒ q1′ q2′
y las partículas se alejan entre sí, y del centro de masa, con cantidades demovimiento iguales y opuestas.
En las Figura 19.5 mostramos el aspecto que presenta una colisión entre dos
Figura 19.5
partículas cuando se la observa desde los referenciales del laboratorio y del centrode masa, respectivamente. (Para mayor simplicidad, hemos supuesto que una de laspartículas se encontraba inicialmente en reposo en el referencial del laboratorio.
Obsérvese que el requisito de que la cantidad de movimiento total sea siemprenula en el SCM no implica que la dirección de qi sea la misma que la de q′i; despuésde la colisión las partículas pueden salir en una dirección ψ cualquiera respecto a ladirección inicial de la cantidad de movimiento de una cualquiera de ellas. El ángulo
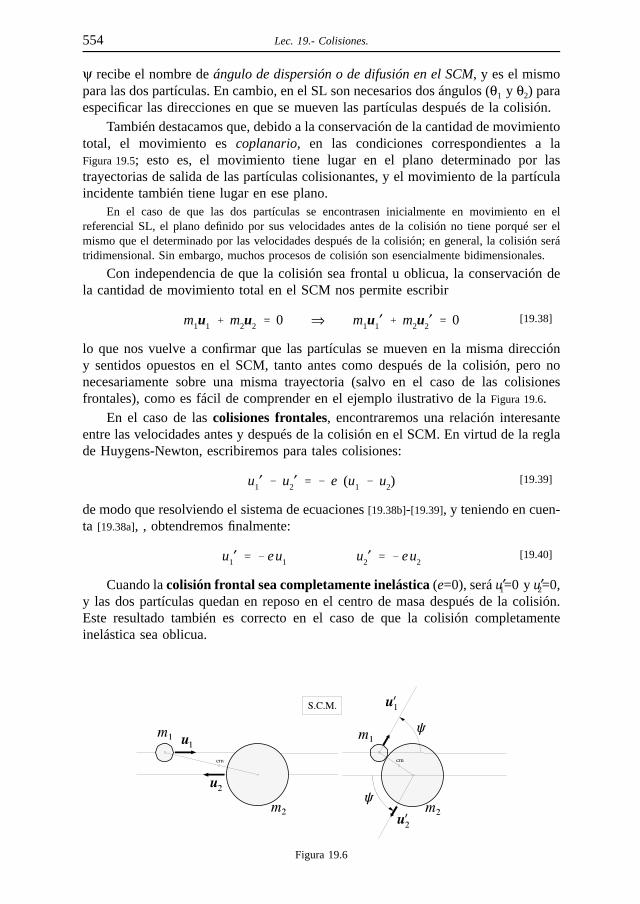
554 Lec. 19.- Colisiones.
ψ recibe el nombre de ángulo de dispersión o de difusión en el SCM, y es el mismopara las dos partículas. En cambio, en el SL son necesarios dos ángulos (θ1 y θ2) paraespecificar las direcciones en que se mueven las partículas después de la colisión.
También destacamos que, debido a la conservación de la cantidad de movimientototal, el movimiento es coplanario, en las condiciones correspondientes a laFigura 19.5; esto es, el movimiento tiene lugar en el plano determinado por lastrayectorias de salida de las partículas colisionantes, y el movimiento de la partículaincidente también tiene lugar en ese plano.
En el caso de que las dos partículas se encontrasen inicialmente en movimiento en elreferencial SL, el plano definido por sus velocidades antes de la colisión no tiene porqué ser elmismo que el determinado por las velocidades después de la colisión; en general, la colisión serátridimensional. Sin embargo, muchos procesos de colisión son esencialmente bidimensionales.
Con independencia de que la colisión sea frontal u oblicua, la conservación de
Figura 19.6
la cantidad de movimiento total en el SCM nos permite escribir
[19.38]m1u1 m2u2 0 ⇒ m1u1′ m2u2′ 0
lo que nos vuelve a confirmar que las partículas se mueven en la misma direccióny sentidos opuestos en el SCM, tanto antes como después de la colisión, pero nonecesariamente sobre una misma trayectoria (salvo en el caso de las colisionesfrontales), como es fácil de comprender en el ejemplo ilustrativo de la Figura 19.6.
En el caso de las colisiones frontales, encontraremos una relación interesanteentre las velocidades antes y después de la colisión en el SCM. En virtud de la reglade Huygens-Newton, escribiremos para tales colisiones:
[19.39]u1′ u2′ e (u1 u2)
de modo que resolviendo el sistema de ecuaciones [19.38b]-[19.39], y teniendo en cuen-ta [19.38a], , obtendremos finalmente:
[19.40]u1′ eu1 u2′ eu2
Cuando la colisión frontal sea completamente inelástica (e=0), será u′1=0 y u′2=0,y las dos partículas quedan en reposo en el centro de masa después de la colisión.Este resultado también es correcto en el caso de que la colisión completamenteinelástica sea oblicua.

§19.5.- Descripción de la colisión en el referencial del centro de masa. 555
Por otra parte, para una colisión frontal perfectamente elástica (e=1) se tiene
[19.41]u1′ u1 u2′ u2
de modo que el módulo de la velocidad de cada partícula permanece inalterado enel SCM, produciéndose simplemente una inversión en el movimiento de cadapartícula. Como veremos más adelante, las relaciones [19.41] también son correctasen las colisiones oblicuas perfectamente elásticas, aunque entonces el signo negativoes irrelevante.
Ejemplo II.- Colisión elástica frontal.- Considerar una colisión elástica frontal entre dos partículas,
Figura 19.7
de masas respectivas m1 y m2, siendo m2 = 3m1, y suponer que la partícula m2 se encuentreinicialmente en reposo en el referencial del laboratorio. Describir la colisión en los referencialesdel laboratorio y del centro de masa.
En el referencial del laboratorio, el centro de masa de las dos partículas se mueve con unavelocidad constante, antes y después de la colisión, dada por
[19.42]vcm
m1v1
m1 m2
14
v1
Las velocidades respectivas de las partículas después de la colisión pueden calcularse mediantelas fórmulas [19.19], con e = 1; el resultado es el siguiente:
[19.43]v1′v1
2v2′
v1
2
En las Figura 19.7a mostramos una sucesión de instantáneas de la colisión, a intervalos iguales detiempo, tal como la vería un observador estacionario en el referencial del laboratorio.
En el referencial del centro de masa, las velocidades de las partículas antes de la colisión son
[19.44]
⎧⎪⎪⎨⎪⎪⎩
u1 v1 vcm v1
14
v1
34
v1
u2 v2 vcm 0 14
v1
14
v1

556 Lec. 19.- Colisiones.
de modo que las partículas van una al encuentro de la otra. (Compruébese que las cantidades demovimiento en el SCM son iguales y opuestas). Las velocidades de las partículas en el SCMdespués de la colisión pueden calcularse a partir del resultado [19.43] precedente; tenemos
[19.45]
⎧⎪⎪⎨⎪⎪⎩
u1′ v1′ vcm
12
v1
14
v1
34
v1
u2′ v2′ vcm
12
v1
14
v1
14
v1
de modo que después de la colisión cada partícula ha invertido su velocidad en el SCM, conformea lo previsto en [19.41]. En la Figura 19.7b mostramos una sucesión de instantáneas que correspon-den a como vería la colisión un observador estacionario en el centro de masa de las dos partículas.Obsérvese la simetría en los movimientos de las partículas al describir la colisión en el SCM.
Ejemplo III.- Colisión inelástica frontal.- Consideraremos ahora una colisión frontal completamente
Figura 19.8
inelástica entre las dos partículas del ejemplo anterior.
Como acabamos de ver, el centro de masa de ambas partículas se mueve en el referencial dellaboratorio con una velocidad constante dada por
[19.46]vcm
m1v1
m1 m2
14
v1
Después de la colisión, las partículas quedan unidas y se mueven con una velocidad comúnigual a la del centro de masa:
[19.47]v1′ v2′14
v1
En el referencial del centro de masa, las velocidades de las partículas antes de la colisión son
[19.48]u1 v1 vcm
34
v1 u2 v2 vcm
14
v1
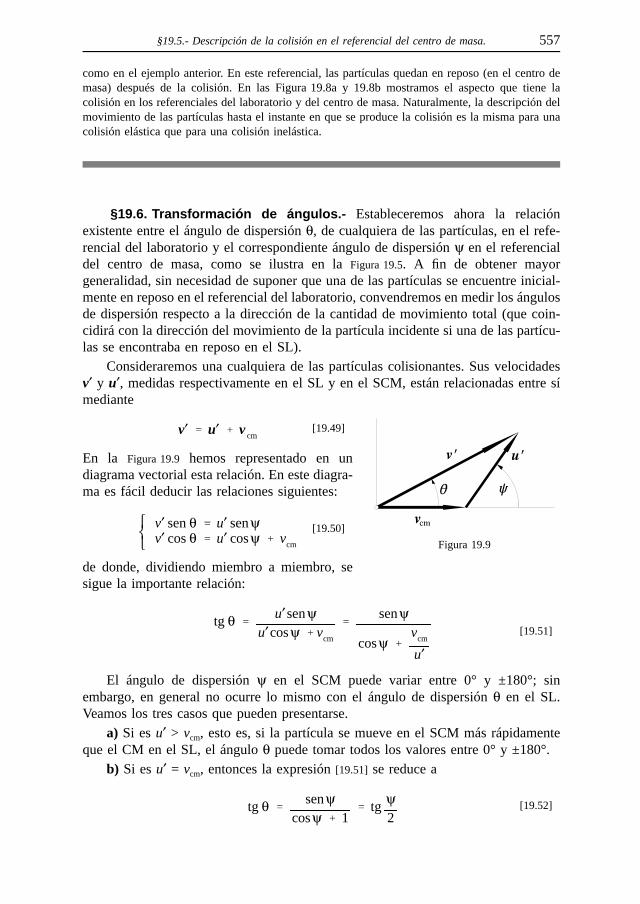
§19.5.- Descripción de la colisión en el referencial del centro de masa. 557
como en el ejemplo anterior. En este referencial, las partículas quedan en reposo (en el centro demasa) después de la colisión. En las Figura 19.8a y 19.8b mostramos el aspecto que tiene lacolisión en los referenciales del laboratorio y del centro de masa. Naturalmente, la descripción delmovimiento de las partículas hasta el instante en que se produce la colisión es la misma para unacolisión elástica que para una colisión inelástica.
§19.6. Transformación de ángulos.- Estableceremos ahora la relaciónexistente entre el ángulo de dispersión θ, de cualquiera de las partículas, en el refe-rencial del laboratorio y el correspondiente ángulo de dispersión ψ en el referencialdel centro de masa, como se ilustra en la Figura 19.5. A fin de obtener mayorgeneralidad, sin necesidad de suponer que una de las partículas se encuentre inicial-mente en reposo en el referencial del laboratorio, convendremos en medir los ángulosde dispersión respecto a la dirección de la cantidad de movimiento total (que coin-cidirá con la dirección del movimiento de la partícula incidente si una de las partícu-las se encontraba en reposo en el SL).
Consideraremos una cualquiera de las partículas colisionantes. Sus velocidadesv′ y u′, medidas respectivamente en el SL y en el SCM, están relacionadas entre símediante
Figura 19.9
[19.49]v′ u′ v cm
En la Figura 19.9 hemos representado en undiagrama vectorial esta relación. En este diagra-ma es fácil deducir las relaciones siguientes:
[19.50]⎧⎨⎩
v′ sen θ u′ senψv′ cos θ u′ cosψ vcm
de donde, dividiendo miembro a miembro, sesigue la importante relación:
[19.51]tg θ u′senψ
u′cosψ vcm
senψ
cosψvcm
u′
El ángulo de dispersión ψ en el SCM puede variar entre 0° y ±180°; sinembargo, en general no ocurre lo mismo con el ángulo de dispersión θ en el SL.Veamos los tres casos que pueden presentarse.
a) Si es u′ > vcm, esto es, si la partícula se mueve en el SCM más rápidamenteque el CM en el SL, el ángulo θ puede tomar todos los valores entre 0° y ±180°.
b) Si es u′ = vcm, entonces la expresión [19.51] se reduce a
[19.52]tg θ senψcosψ 1
tg ψ2

558 Lec. 19.- Colisiones.
y, como ψ puede tomar los valores comprendidos entre 0° y ±180°, el ángulo θ sólopodrá tomar los valores comprendidos entre 0° y ±90°. Esto es, la partícula no podrádesviarse en el SL un ángulo superior a 90°.
c) Si es u′ < vcm, entonces la partícula se mueve en el SCM más lentamente que
Figura 19.10
el propio CM en el SL. En estas condiciones, el denominador de [19.51] nunca puedeanularse y el valor de tg θ semantendrá siempre finito, loque equivale a afirmar queexiste un ángulo máximo dedesviación de la partícula en elSL, tal que θmáx < 90°. En laFigura 19.10 hemos representadográficamente la función θ =f(ψ), para u′ < vcm, poniendode manifiesto la existencia deun valor máximo para el ángu-lo θ. Podemos calcular fácil-mente el valor de θmáx. Deriva-
remos respecto a ψ la expresión [19.51] y obtendremos
[19.53]d
dψ(tg θ)
vcm
u′cosψ 1
⎛⎜⎜⎝
⎞⎟⎟⎠
cosψvcm
u′
2
expresión que se anula para
[19.54]cosψ0
u′vcm
y el valor máximo del ángulo de dispersión θ en el SL viene dado por
[19.55]tgθmáx
u′
v 2cm u′2
o bien [19.56]senθmáx
u′vcm
< 1
como el lector comprobará fácilmente.En la Figura 19.11 se ilustran gráficamente los tres casos considerados anterior-
mente. Debemos interpretar estos diagramas de la siguiente forma. A la velocidad delcentro de masa (vcm) sumaremos vectorialmente la velocidad de la partícula en elSCM (u′). Dependiendo del ángulo ψ con que se produzca la dispersión en el SCM,los vectores u′ posibles se colocarán de modo que sus extremos definen unacircunferencia de radio u′ cuyo centro se encuentra en el extremo del vector vcm.Entonces, para un ángulo ψ dado, obtendremos la velocidad v′ y el ángulo θ en el

§19.6.- Transformación de ángulos. 559
SL sin más que unir el origen de vcm con el extremo de u′.
Figura 19.11
En el diagrama 19.11a se observará fácilmente que al variar el ángulo ψ en elSCM, entre 0° y ±180°, el ángulo θ en el SL variará también entre 0° y ±180°. Eldiagrama puede servirnos para determinar unívocamente el valor de v′ y de θ enfunción de ψ.
En el diagrama 19.11b comprobaremos, a partir de un teorema elemental de lageometría4, que siempre es θ = ψ/2 y que, por lo tanto, cuando ψ → 180°,tendremos que θ → 90°.
El diagrama 19.11c es algo más complejo. En primer lugar, observaremos que noexiste una relación biunívoca entre los ángulos θ y ψ. A un valor dado del ánguloθ (SL) le corresponden dos valores diferentes del ángulo ψ (SCM), que designaremospor ψf y ψb, donde los subíndices "f" y "b" significan forward (adelante) y backward(atrás), respectivamente. Comprenderemos esta situación si reparamos en que lavelocidad de la partícula en el SCM (u′) resulta ser insuficiente para compensar lavelocidad del propio centro de masa (vcm); entonces, si la partícula se mueve haciaatrás en el SCM (ψ > 90°), su movimiento será hacia adelante en el SL (θ < 90°).
En segundo lugar, y como consecuencia de lo anteriormente dicho, tambiéntendremos dos valores posibles para la velocidad de la partícula en el SL: los valoresv′f y v′b, correspondientes a los movimientos "hacia adelante" y "hacia atrás" en elSCM. Tengamos en cuenta que en los experimentos sobre colisiones se midennormalmente los ángulos de dispersión en el SL (θ); entonces, aun cuandoconozcamos el ángulo θ, la velocidad del centro de masa vcm y el módulo (u′) de lavelocidad de la partícula en el SCM, tenemos dos posibilidades para el valor delmódulo de v′ en el SL.
Por último, debemos destacar que el ángulo θmáx será tanto menor cuanto máspequeña sea la velocidad u′ en comparación con vcm; una partícula que tenga unavelocidad muy pequeña en el SCM, frente a la velocidad del centro de masa, sólopodrá moverse "hacia adelante" en el SL, en el interior de un cono tanto más cerradocuanto menor sea u′.
4 El valor del ángulo inscrito en una circunferencia es igual a la mitad del arco que subtiendeen dicha circunferencia.

560 Lec. 19.- Colisiones.
A partir del diagrama 19.11c determinaremos fácilmente el valor máximo del ángulo de difusión(θmáx) en el referencial SL y el ángulo correspondiente (ψ0) en el referencial SCM. En efecto,obsérvese en el triángulo rectángulo dibujado a trazos-puntos, correspondiente a dicha situaciónlímite, que
[19.57]cos(π ψ0) cosψ0
u′vcm
senθmáx
u′vcm
que son las mismas expresiones [19.54] y [19.56] determinadas analíticamente anteriormente.
Dejamos al cuidado del lector comprobar que la ecuación de transformacióninversa de la [19.51] es
[19.58]tg ψ senθ
cosθvcm
v′
que nos permite calcular el ángulo en el SCM en función del ángulo en el SL.
§19.7. Balance energético en las colisiones. Definición del Q.- El valorde la energía cinética de una partícula o de un sistema de partículas depende delreferencial que utilicemos. Ya hemos demostrado (§17.8) que la energía cinética totalde un sistema de partículas en un referencial dado puede escribirse como la suma dela energía cinética asociada con el movimiento del centro de masa del sistema (en esereferencial dado) y de la energía cinética asociada con el movimiento de laspartículas respecto a dicho centro de masa. Esta última componente de la energíacinética total, que recibe el nombre de energía cinética interna, tiene carácterintrínseco, y sólo puede ser nula cuando todas las partículas se encuentren en reposoen el SCM. Representando por Ek y Ec las energías cinéticas en el referencial dado(el SL, normalmente) y en el SCM, respectivamente, podemos escribir.
[19.59]Ek
12
(m1 m2) v 2cm Ec
con [19.60]Ek
12
m1v2
112
m2v2
2 Ec
12
m1u2
112
m2u2
2
En el caso de un sistema de partículas que está constituido solamente por dos partículas, puedeser conveniente expresar Ec en función de la masa reducida y de la velocidad relativa entre laspartículas. Como se deduce inmediatamente de las ecuaciones [19.34], se sigue que
[19.61]Ec
12
m1m2
m1 m2
v 212
12μ v 2
12
Estamos interesados en evaluar el cambio que pueda producirse en la energíacinética total de las dos partículas durante la colisión. Para "antes" y para "después"de la colisión, escribiremos:
[19.62]Ek
12
(m1 m2) v 2cm Ec Ek′
12
(m1 m2) v 2cm Ec′

§19.7.- Balance energético en las colisiones. Definición del Q. 561
donde hemos tenido en cuenta que la velocidad del centro de masa es la misma antesy después de la colisión (vcm = cte).
Definamos ahora una cantidad Q como la diferencia entre la energía cinética totaldespués y antes de la colisión; esto es, igual al cambio que experimenta la energíacinética. Restando miembro a miembro las dos expresiones anteriores [19.62] seobtiene
[19.63]Q Ek′ Ek Ec′ Ec
de modo que el valor de Q es el mismo en los referenciales del centro de masa y dellaboratorio.
Escribamos ahora las expresiones de la energía cinética total en el SCM, antesy después de la colisión:
[19.64]Ec
12
m1u2
112
m2u2
2 Ec′12
m1u1′2 1
2m2u2′
2
§19.7.a. Colisiones frontales.- Si nos limitamos a considerar las colisionesfrontales, y tenemos en cuenta las relaciones [19.40], la energía cinética en el SCMdespués de la colisión puede escribirse en la forma
[19.65]Ec′12
m1e2u 2
112
m2e2u 2
2 e 2Ec
y el Q de la colisión frontal puede expresarse en función de la energía cinética totalantes de la colisión (en el SCM) y del coeficiente de restitución:
[19.66]Q ΔEk ΔEc (1 e 2) Ec
En el caso de las colisiones frontales perfectamente elásticas (e = 1) es Q = 0,de modo que la energía cinética total permanece constante durante la colisión, aunquepueda haber un intercambio de energía cinética entre las partículas colisionantes. Estaes una característica fundamental de las colisiones perfectamente elásticas y que sirvenormalmente para definirlas:
son colisiones perfectamente elásticas aquellas en las que la energía cinéticatotal permanece constante.
Obsérvese que, por ser e ≤ 1, el Q de las colisiones en las que las partículas nopierden su identidad (son las mismas antes y después de la colisión) siempre esnegativo o nulo. Esto es, en general siempre habrá una cierta desaparición de energíacinética durante la colisión. En cualquier caso sigue siendo válida la conservación dela energía total; la energía cinética que se haya perdido aparecerá como energíainterna de las "partículas" colisionantes. Queda claro que las colisiones entre"verdaderas partículas" (i.e., sin estructura interna) serán perfectamente elásticas.
En las colisiones completamente inelásticas, sean frontales u oblicuas, al ser e= 0, será Q = - Ec, de modo que toda la energía cinética en el referencial del centrode masa se pierde en este tipo de colisiones. El término completamente inelásticaaplicado a una colisión no significa que se pierda toda la energía cinética inicial;

562 Lec. 19.- Colisiones.
significa que la pérdida de energía cinética es tan grande como sea compatible conla conservación de la cantidad de movimiento total. Esto es, la energía cinéticaasociada con el movimiento del centro de masa
[19.67]Ek,cm
12
(m1 m2) v 2cm cte
se conserva en todos los tipos de colisiones. Pero, naturalmente, la energía cinéticainterna (asociada con el movimiento relativo entre las partículas colisionantes)desaparece totalmente en las colisiones completamente inelásticas.
La expresión [19.66] nos permite calcular la fracción de energía cinética que sepierde durante la colisión en el referencial del centro de masa:
[19.68]QEc
ΔEc
Ec
(1 e 2)
Sin embargo, frecuentemente estamos interesados en calcular la fracción de energíacinética que se pierde en el referencial del laboratorio. Como ya hemos visto, el Qde la colisión tiene el mismo valor en el SL y en el SCM, y la primera de lasexpresiones de [19.62] nos permite escribir:
[19.69]Ec Ek
12
(m1 m2)v 2cm
A fin de simplificar el problema, consideraremos que la partícula m2 se encuentreinicialmente en reposo en el SL. Entonces será
[19.70]Ek
12
m1v2
1 vcm
m1
m1 m2
v1
y sustituyendo estos valores en [19.69] se obtiene
[19.71]Ec
12
m1v2
112
m 21
m1 m2
v 21
12
m1m2
m1 m2
v 21
m2
m1 m2
Ek
de modo que [19.72]Q (1 e 2) Ec (1 e 2)m2
m1 m2
Ek
o sea [19.73]QEk
ΔEk
Ek
(1 e 2)m2
m1 m2
Así, en el caso de una colisión completamente inelástica (e = 0) de una partículaincidente sobre una partícula en reposo será
[19.74]ΔEk
Ek
m2
m1 m2

§19.7.- Balance energético en las colisiones. Definición del Q. 563
y si ambas partículas tienen la misma masa, será -ΔEk/Ek = 1/2, de modo que lamitad de la energía cinética inicial se pierde durante la colisión.
Si m1 m2, será -ΔEk/Ek ≈ 1, y se pierde prácticamente toda la energía cinéticainicial; este es el caso de un meteorito que se estrella contra la Tierra. Por elcontrario, si es m1 m2, será -ΔEk/Ek ≈ 0, de modo que no se pierde prácticamentenada de la energía cinética inicial; esta situación corresponde a la colisióncompletamente inelástica entre un automóvil en movimiento y un insecto en reposoque se estrella contra el parabrisas de aquél.
§19.7.b. Colisiones oblicuas.- Consideremos una colisión oblicua entre dos esferaslisas (Figura 19.12); supondremos que la esfera m2 se encuentra inicialmente en reposoen el SL. Entonces, las energías cinéticas en el SL, antes y después de la colisión,vienen dadas por
[19.75]Ek
12
m1v2
1 Ek′12
m1v1′2 1
2m2v2′
2
El cambio en la energía cinética, esto es, el Q de la colisión, es
[19.76]Q ΔEk Ek′ Ek
12
m1v1′2 1
2m2v2′
2 12
m1v2
1
Las velocidades finales v′1 y v′2 pueden
Figura 19.12
calcularse en función del ángulo θ2 y delcoeficiente de restitución e. Sirviéndose delas expresiones [19.29] y teniendo en cuentaque
[19.77]v1′2 v1ξ′
2 v1η′2 v2′ v2ξ′
eliminaremos v′1 y v′2 en la expresión [19.76].Después de algunas operaciones, fáciles,pero laboriosas, se obtiene el resultadosiguiente:
[19.78]Q ΔEk
12
m1m2
m1 m2
(1 e 2 )v 21 cos2θ2
m2
m1 m2
(1 e 2 )Ekcos2θ2
o sea [19.79]QEk
ΔEk
Ek
m2
m1 m2
(1 e 2 ) cos2θ2
Estos resultados se reducen a los obtenidos anteriormente para las colisiones frontales([19.72]-[19.73]) sin más que poner θ2=0. Obsérvese que la fracción de la energía ciné-tica inicial que se pierde en el SL durante la colisión oblicua es función del ánguloθ2, y en definitiva del parámetro de impacto b. La pérdida de energía cinética esmáxima en las colisiones frontales (b=0, θ2=0) y tiende hacia cero cuando la colisiónes de "refilón" (b → R1+R2, θ2 → 90°).
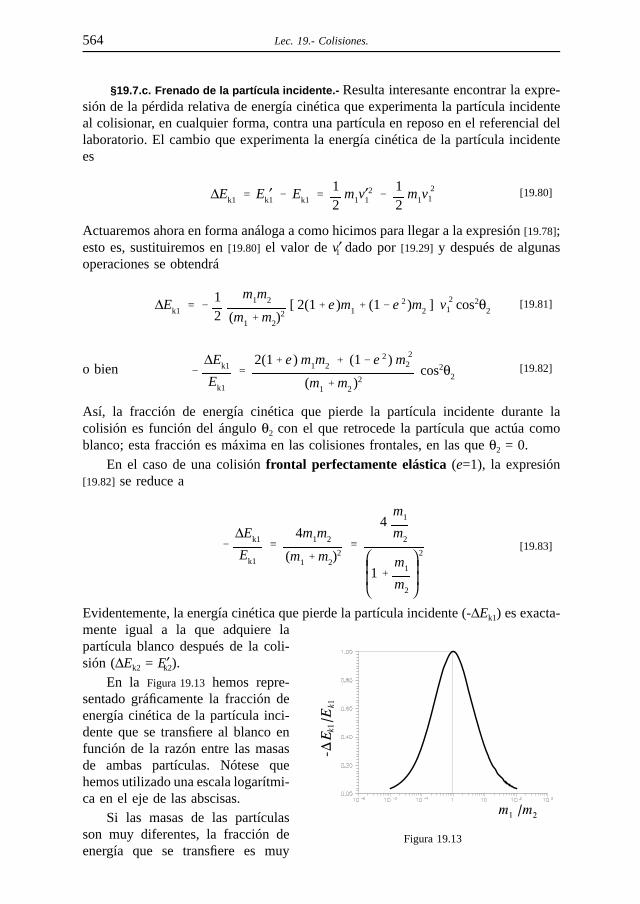
564 Lec. 19.- Colisiones.
§19.7.c. Frenado de la partícula incidente.- Resulta interesante encontrar la expre-sión de la pérdida relativa de energía cinética que experimenta la partícula incidenteal colisionar, en cualquier forma, contra una partícula en reposo en el referencial dellaboratorio. El cambio que experimenta la energía cinética de la partícula incidentees
[19.80]ΔEk1 Ek1′ Ek1
12
m1v1′2 1
2m1v
21
Actuaremos ahora en forma análoga a como hicimos para llegar a la expresión [19.78];esto es, sustituiremos en [19.80] el valor de v′1 dado por [19.29] y después de algunasoperaciones se obtendrá
[19.81]ΔEk1
12
m1m2
(m1 m2)2
[ 2(1 e )m1 (1 e 2 )m2 ] v 21 cos2θ2
o bien [19.82]ΔEk1
Ek1
2(1 e ) m1m2 (1 e 2 ) m 22
(m1 m2 )2cos2θ2
Así, la fracción de energía cinética que pierde la partícula incidente durante lacolisión es función del ángulo θ2 con el que retrocede la partícula que actúa comoblanco; esta fracción es máxima en las colisiones frontales, en las que θ2 = 0.
En el caso de una colisión frontal perfectamente elástica (e=1), la expresión[19.82] se reduce a
[19.83]ΔEk1
Ek1
4m1m2
(m1 m2)2
4m1
m2
⎛⎜⎜⎝
⎞⎟⎟⎠
1m1
m2
2
Evidentemente, la energía cinética que pierde la partícula incidente (-ΔEk1) es exacta-
Figura 19.13
mente igual a la que adquiere lapartícula blanco después de la coli-sión (ΔEk2 = E′k2).
En la Figura 19.13 hemos repre-sentado gráficamente la fracción deenergía cinética de la partícula inci-dente que se transfiere al blanco enfunción de la razón entre las masasde ambas partículas. Nótese quehemos utilizado una escala logarítmi-ca en el eje de las abscisas.
Si las masas de las partículasson muy diferentes, la fracción deenergía que se transfiere es muy

§19.7.- Balance energético en las colisiones. Definición del Q. 565
pequeña. Así, la transferencia de energía tiende hacia cero cuando m1/m2 tiende haciacero (m1 m2, partícula muy ligera que choca contra otra muy pesada) y cuandom1/m2 tiende hacia infinito (m1 m2, partícula muy pesada que choca contra otra muyligera). En el primer caso, la partícula incidente rebota con una velocidad aproxima-damente igual a su velocidad inicial (ejemplo: pelota de ping-pong en movimientoque choca con un balón de baloncesto en reposo). En el segundo caso, el movimientode la partícula incidente no se altera prácticamente nada como consecuencia de lacolisión (ejemplo: colisión entre un balón de baloncesto en movimiento y una pelotade ping-pong en reposo).
La fracción de energía cinética transferida desde la partícula incidente a lapartícula que actúa como blanco alcanza su valor máximo, igual a la unidad, cuandolas dos partículas tiene la misma masa. Entonces, la partícula incidente queda enreposo en el referencial de laboratorio después de la colisión, y la partícula blancosale con la misma velocidad que traía la partícula incidente.
Los resultados anteriores tienen una conexión importante con el problema del frenado de losneutrones en un reactor. La probabilidad de que un neutrón pueda inducir la fisión de un núcleo de Uranio-235 es grande si los neutrones son lentos. Pero los neutrones emitidos en el proceso de fisión se muevencon gran velocidad (neutrones rápidos). Por consiguiente, será necesario frenar estos neutrones rápidosantes de que escapen del reactor, a fin de que puedan inducir nuevas fisiones y se mantenga así la reacciónen cadena. El proceso principal que puede producir el frenado de los neutrones consiste en las colisioneselásticas con otros núcleos. Ni las colisiones de los neutrones con los electrones que encuentren en elreactor (cuya masa es tan sólo 1/2000 la masa del neutrón), ni las colisiones de los neutrones con losnúcleos de Uranio-238 no fisionable (con una masa que es unas 238 veces superior a la del neutrón)pueden producir un frenado eficiente de los neutrones. Por eso, es necesario colocar en el interior delreactor algún material que contenga núcleos ligeros, de forma que m1/m2 esté lo más cerca posible de launidad. Este material recibe el nombre de moderador. Naturalmente, el mejor moderador sería elhidrógeno, para el que m1/m2 ≈ 1. Sin embargo, como el hidrógeno es gaseoso a las temperaturasordinarias, lo que repercute en un número de átomos de hidrógeno por unidad de volumen relativamentebajo, se prefiere utilizar otros materiales como moderadores. Frecuentemente se utiliza el agua ordinaria(H2O) que, además de ser abundante y barata, presenta la ventaja de contener casi mil veces más átomosde hidrógeno por unidad de volumen que el hidrógeno puro gaseoso. Sin embargo, el hidrógeno presentael inconveniente de que tiende a capturar neutrones para formar deuterio. Como el deuterio difícilmentepuede capturar neutrones (para formar tritio), es preferible el uso del agua pesada (D2O) como moderadoren los reactores nucleares. Por otra parte, en el blindaje de una fuente de neutrones es conveniente lautilización de sustancias sólidas; corrientemente se utilizan sustancias orgánicas muy hidrogenadas, comola parafina.
§19.8. Estudio de las colisiones en función del Q.- Hemos analizado losaspectos cinemáticos y energéticos de las colisiones sirviéndonos del principio deconservación de la cantidad de movimiento y de la definición del coeficiente derestitución como únicos puntos de partida. El coeficiente de restitución representa unamedida del grado de elasticidad de la colisión y, por ende, del grado en que seconserva la energía cinética en la misma. El Q de la colisión tiene un significadoanálogo al del coeficiente de restitución, al menos en aquellas colisiones en las quelas partículas conservan su identidad. Sin embargo, en las colisiones en las que nose conserva la identidad de las partículas (reacciones), la analogía entre el Q y elcoeficiente de restitución resulta demasiado artificiosa. Pensemos que en lasreacciones (químicas o nucleares) el Q puede ser positivo, lo que representa una"aparición" de energía cinética durante la reacción; en las reacciones, el coeficientede restitución pierde el significado que le dimos en su definición original. Enconsecuencia, resulta conveniente e interesante estudiar las colisiones (y las
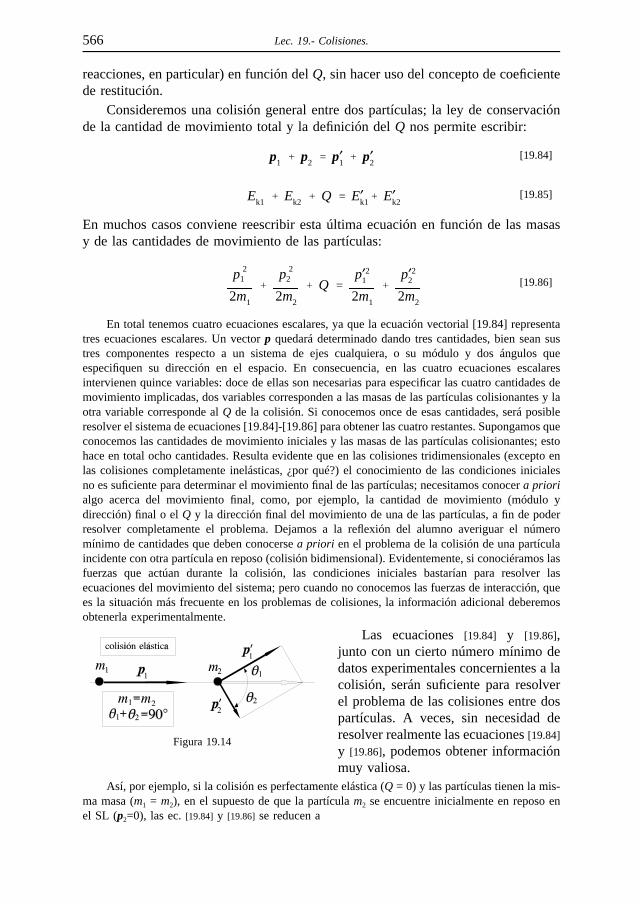
566 Lec. 19.- Colisiones.
reacciones, en particular) en función del Q, sin hacer uso del concepto de coeficientede restitución.
Consideremos una colisión general entre dos partículas; la ley de conservaciónde la cantidad de movimiento total y la definición del Q nos permite escribir:
[19.84]p1 p2 p1′ p2′
[19.85]Ek1 Ek2 Q Ek1′ Ek2′
En muchos casos conviene reescribir esta última ecuación en función de las masasy de las cantidades de movimiento de las partículas:
[19.86]p 2
1
2m1
p 22
2m2
Qp1′
2
2m1
p2′2
2m2
En total tenemos cuatro ecuaciones escalares, ya que la ecuación vectorial [19.84] representatres ecuaciones escalares. Un vector p quedará determinado dando tres cantidades, bien sean sustres componentes respecto a un sistema de ejes cualquiera, o su módulo y dos ángulos queespecifiquen su dirección en el espacio. En consecuencia, en las cuatro ecuaciones escalaresintervienen quince variables: doce de ellas son necesarias para especificar las cuatro cantidades demovimiento implicadas, dos variables corresponden a las masas de las partículas colisionantes y laotra variable corresponde al Q de la colisión. Si conocemos once de esas cantidades, será posibleresolver el sistema de ecuaciones [19.84]-[19.86] para obtener las cuatro restantes. Supongamos queconocemos las cantidades de movimiento iniciales y las masas de las partículas colisionantes; estohace en total ocho cantidades. Resulta evidente que en las colisiones tridimensionales (excepto enlas colisiones completamente inelásticas, ¿por qué?) el conocimiento de las condiciones inicialesno es suficiente para determinar el movimiento final de las partículas; necesitamos conocer a priorialgo acerca del movimiento final, como, por ejemplo, la cantidad de movimiento (módulo ydirección) final o el Q y la dirección final del movimiento de una de las partículas, a fin de poderresolver completamente el problema. Dejamos a la reflexión del alumno averiguar el númeromínimo de cantidades que deben conocerse a priori en el problema de la colisión de una partículaincidente con otra partícula en reposo (colisión bidimensional). Evidentemente, si conociéramos lasfuerzas que actúan durante la colisión, las condiciones iniciales bastarían para resolver lasecuaciones del movimiento del sistema; pero cuando no conocemos las fuerzas de interacción, quees la situación más frecuente en los problemas de colisiones, la información adicional deberemosobtenerla experimentalmente.
Las ecuaciones [19.84] y [19.86],
Figura 19.14
junto con un cierto número mínimo dedatos experimentales concernientes a lacolisión, serán suficiente para resolverel problema de las colisiones entre dospartículas. A veces, sin necesidad deresolver realmente las ecuaciones [19.84]
y [19.86], podemos obtener informaciónmuy valiosa.
Así, por ejemplo, si la colisión es perfectamente elástica (Q = 0) y las partículas tienen la mis-ma masa (m1 = m2), en el supuesto de que la partícula m2 se encuentre inicialmente en reposo enel SL (p2=0), las ec. [19.84] y [19.86] se reducen a

§19.8.- Estudio de las colisiones en función del Q. 567
[19.87]
⎧⎪⎨⎪⎩
p1 p1′ p2′
p 21 p1′
2 p2′2
lo que nos permite asegurar que
[19.88]p1′ p2′ 0
o sea que las dos partículas se mueven en ángulo recto en el referencial del laboratorio después dela colisión, como se muestra en la Figura 19.14.
Resulta sumamente interesante estudiar las colisiones en el referencial del centrode masa, ya que en este referencial siempre es nula la cantidad de movimiento total,de modo que
[19.89]q1 q2 q1′ q2′
y, por lo tanto, la ec. [19.86] puede escribirse en una forma más sencilla;
[19.90]12
⎛⎜⎜⎝
⎞⎟⎟⎠
1m1
1m2
q 21 Q 1
2
⎛⎜⎜⎝
⎞⎟⎟⎠
1m1
1m2
q1′2
o sea
Figura 19.15
[19.91]q 21 2μ Q q1′
2
donde hemos tenido en cuenta que elvalor de Q es el mismo en todos losreferenciales. A partir de la expresiónanterior se deduce una propiedad im-portante de las colisiones perfectamenteelásticas, ya que al ser Q=0 serán
[19.92]q1 q1′ q2 q2′
Entonces, en el SCM las cantidades demovimiento de las partículas por separado tienen los mismos módulos antes ydespués de una colisión perfectamente elástica, de modo que no hay intercambio deenergía cinética entre las partículas. Sin embargo, si hay intercambio de cantidad demovimiento, pues aunque no hayan cambiado los módulos de las cantidades de movi-miento respectivas, si que han cambiado sus direcciones (Figura 19.15). De lasexpresiones [19.92] se sigue de inmediato la igualdad entre los módulos de lavelocidad de cada partícula antes y después de una colisión perfectamente elástica:
[19.93]u1 u1′ u2 u2′
como ya habíamos anticipado en [19.41]
§19.9. Algo más acerca de las colisiones elásticas.- Supongamos que unapartícula de masa m1, que se mueve inicialmente con una velocidad v1, colisiona conotra partícula de masa m2, que se encuentra inicialmente en reposo en el referencialdel laboratorio. Después de la colisión, las partículas se mueven con velocidades v1 y

568 Lec. 19.- Colisiones.
v2, en direcciones que forman ángu-
Figura 19.16
los θ1 y θ2 con la dirección del movi-miento inicial de m1. Denominaremosa esos ángulos como ángulo dedispersión (θ1) y ángulo de retroceso(θ2).
Con independencia del carácterde la colisión, se conservará la canti-dad de movimiento total, esto es
[19.94]m1v1 m1v1′ m2v2′
y considerando las componentes5 en las direcciones longitudinal y transversal almovimiento de la partícula incidente, tenemos:
[19.95]
⎧⎪⎨⎪⎩
m1v1 m1v1′ cosθ1 m2v2′ cosθ2
0 m1v1′ senθ1 m2v2′ senθ2
Estas dos ecuaciones son insuficientes para determinar las cuatro incógnitas v′1,v′2, θ1 y θ2. Podemos, por ejemplo, resolver el sistema de ec. [19.95] respecto a lasincógnitas v′1 y v′2 para obtener
[19.96]v1′senθ2
sen(θ1 θ2)v1 v2′
m1
m2
senθ1
sen(θ1 θ2)v1
que nos permiten calcular las celeridades finales en función de los ángulos dedispersión y de retroceso.
En las colisiones perfectamente elásticas, la conservación de la energía cinéticatotal nos proporciona una nueva ecuación
[19.97]12
m1v2
112
m1v1′2 1
2m2v2′
2
Disponemos ahora de tres ecuaciones, las [19.95] y [19.97]; pero estas ecuacionessiguen siendo insuficientes para determinar el movimiento final en función de lascondiciones iniciales; necesitamos conocer algo acerca del movimiento final para queel problema tenga solución.
5 Al poner el signo negativo en la segunda ecuación de [19.95], estamos estableciendo uncriterio de signos en el que los ángulos de difusión (θ1) y de retroceso (θ2) se consideran positivosen las direcciones que se indican en la Figura 19.16, i.e., en direcciones opuestas. Con esteconvenio de signos, los valores de θ1 y de θ2 serán siempre positivos.

§19.9.- Algo más acerca de las colisiones elásticas. 569
Ejemplo IV.- Determinar el cociente (m1/m2) entre las masas de las partículas colisionantes enfunción de los ángulos de dispersión y de retroceso, en una colisión perfectamente elástica en laque una de las partículas se encontraba inicialmente en reposo.
Sustituyendo los valores de v′1 y v′2, dados por [19.96], en la ec. [19.97], después de operar seobtiene
[19.98]m1
m2
sen2(θ1 θ2) sen2θ2
sen2θ1
Si ahora tenemos en cuenta que
[19.99]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
sen(θ1 θ2) senθ2 2 senθ1 2θ2
2cos
θ1
2
sen(θ1 θ2) senθ2 2 cosθ1 2θ2
2sen
θ1
2
al desarrollar el numerador de [19.98], obtenemos
[19.100]
sen2(θ1 θ2) sen2θ2 [sen(θ1 θ2) senθ2] [sen(θ1 θ2) senθ2]
4 senθ1 2θ2
2cos
θ1 2θ2
2sen
θ1
2cos
θ1
2sen(θ1 2θ2) senθ1
y, en consecuencia, la expresión [19.98] se reduce a
[19.101]m1
m2
sen(θ1 2θ2)
senθ1
Este resultado nos permite calcular la relación entre las masas de las partículas incidente y blanco,en el supuesto de que la colisión sea elástica, midiendo simplemente los ángulos de dispersión yde retroceso. Obsérvese que si es m1 = m2, deberá ser sen(θ1 + 2θ2) = sen θ1 = sen(π - θ1), de dondese sigue que es θ1 + θ2 = 90° y, por lo tanto, las dos partículas se mueven en ángulo recto despuésde la colisión, como ya habíamos visto en el epígrafe anterior.
Pasemos ahora al referencial del centro de masa. La velocidad del centro de masaen el SL viene dada por
[19.102]v cm
m1
m1 m2
v1
y las velocidades de las partículas en el SCM, expresadas en función de la velocidaddel centro de masa, son

570 Lec. 19.- Colisiones.
[19.103]
⎧⎪⎪⎨⎪⎪⎩
u1 v1 v cm
m1 m2
m1
v cm v cm
m2
m1
v cm
u2 v2 v cm 0 v cm v cm
y por consiguiente, dado que en las colisiones elásticas es u1 = u′1 y u2 = u′2, podemosescribir para los módulos:
[19.104]u1 u1′m2
m1
vcm u2 u2′ vcm
de modo que
⎧⎪⎪⎪⎨⎪⎪⎪⎩
si m1<m2 es u1′>vcm
si m1 m2 es u1′ vcm
si m1>m2 es u1′<vcm
y es la razón m1/m2 la que nos indicará cual de los diagramas de la Figura 19.11 des-cribe la colisión elástica.
Podemos relacionar el ángulo de dispersión (θ1) en el SL con el ángulo dedispersión (ψ) en el SCM haciendo intervenir el cociente m1/m2. Sustituyendovcm/u′1 = m1/m2 en la expresión [19.51] se obtiene
[19.105]tg θ1
sen ψ
cos ψvcm
u′
sen ψ
cos ψm1
m2
y el análisis de esta expresión, en función del valor de m1/m2, nos lleva a lasconclusiones siguientes.
a) Si es m1 m2, entonces será tg θ1 ≈ tg ψ, o sea, θ1 ≈ ψ. Esto es, los ángulosde dispersión en el SL y en el SCM son casi iguales. En consecuencia, la partículam2 es poco afectada por la colisión, actuando como si se tratase de un centro fijo dedifusión. Obsérvese que θ1 puede tomar, al igual que ψ, todos los valorescomprendidos entre 0° y ±180°.
b) Si es m1 < m2, nos encontramos con que tg θ1 → ±∞ para un valor de ψ iguala ψ0 = arcos(-m1/m2), ya que entonces se anula el denominador de [19.105], de modoque el ángulo de dispersión θ1 en el SL puede tomar todos los valores comprendidosentre 0° y ±180°.
c) Si es m1 = m2, será tg θ1 = tg (ψ/2), de modo que θ1 = ψ/2, y los valoresposibles del ángulo de dispersión θ1 en el SL estarán comprendidos entre 0° y ±90°.
d) Si es m1 > m2, estaremos en el caso de la dispersión de una partícula pesadapor otra partícula ligera. En estas condiciones es obvio que existirá un ángulomáximo de dispersión (en el SL) menor que 90° (dispersión hacia adelante en el SL).El valor máximo de dicho ángulo de dispersión corresponde a un ángulo ψ0 en el
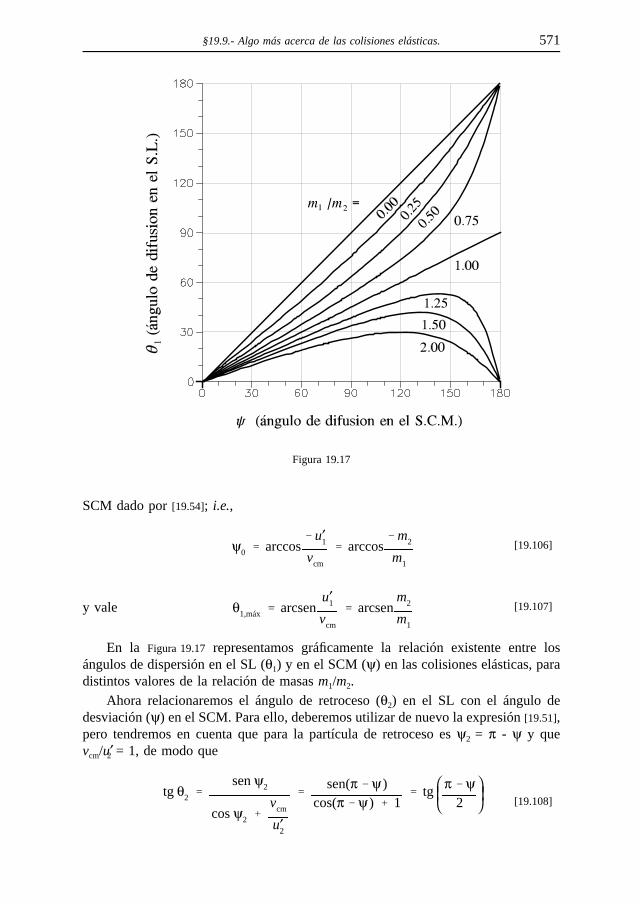
§19.9.- Algo más acerca de las colisiones elásticas. 571
SCM dado por [19.54]; i.e.,
Figura 19.17
[19.106]ψ0 arccosu1′
vcm
arccosm2
m1
y vale [19.107]θ1,máx arcsenu1′vcm
arcsenm2
m1
En la Figura 19.17 representamos gráficamente la relación existente entre losángulos de dispersión en el SL (θ1) y en el SCM (ψ) en las colisiones elásticas, paradistintos valores de la relación de masas m1/m2.
Ahora relacionaremos el ángulo de retroceso (θ2) en el SL con el ángulo dedesviación (ψ) en el SCM. Para ello, deberemos utilizar de nuevo la expresión [19.51],pero tendremos en cuenta que para la partícula de retroceso es ψ2 = π - ψ y quevcm/u′2 = 1, de modo que
[19.108]tg θ2
sen ψ2
cos ψ2
vcm
u2′
sen(π ψ )cos(π ψ ) 1
tg ⎛⎜⎝
⎞⎟⎠
π ψ2
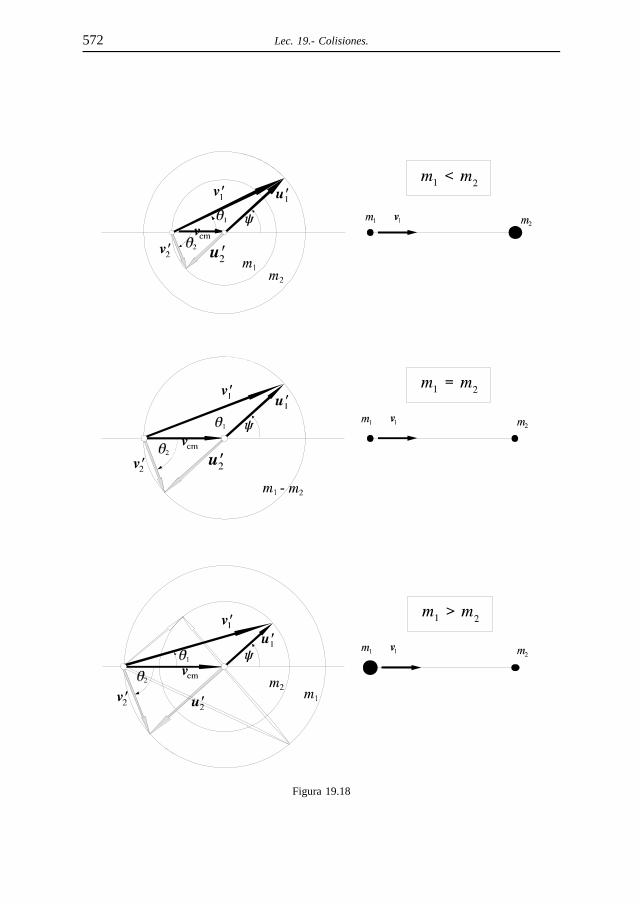
572 Lec. 19.- Colisiones.
Figura 19.18

§19.9.- Algo más acerca de las colisiones elásticas. 573
por lo que [19.109]θ2
π ψ2
Llegaremos a los mismos resultados a partir de los diagramas vectoriales que semuestran en la Figura 19.18. La construcción de estos diagramas se hace siguiendo losmismos principios que utilizábamos al construir los diagramas de la Figura 19.11. Sinembargo, en estos nuevos diagramas hacemos aparecer las masas de las partículas;los radios de las circunferencias son proporcionales a m1 y a m2. Los vectores u′1 y u′2
tienen la misma dirección y sentidos opuestos y sus extremos están situados sobre lascircunferencias correspondientes a m2 y m1, respectivamente. Esto es así porque enel SCM debe ser m1u′1 + m2u′2 = 0. Además, deberá ser vcm = u′2.
En cualquiera de los tres diagramas de la Figura 19.18 se puede comprobar que secumple la relación [19.109]; esto es así en virtud de un teorema elemental de lageometría que relaciona el valor del ángulo inscrito en una circunferencia con lamitad del arco que subtiende en la misma. Obsérvese en estos diagramas que, conindependencia del valor del cociente m1/m2, el ángulo de retroceso admite todos losvalores comprendidos entere 0° y ±190°, y que cuando es m1 = m2, siempre es θ1 +θ2 = 90°, como ya sabemos.
§19.10. Reacciones.- Las moléculas, átomos y núcleos poseen una estructurainterna a la que podemos asociar una energía potencial interna (Ei
p) y una energía cinéticainterna (Ei
k); o bien, en definitiva, una energía interna (Ei) definida por Ei = Eip + Ei
k.Cuando ocurre una colisión entre tales "partículas", puede haber reagrupaciones internasen las mismas, y la energía interna total (esto es, la suma de las energías internas de las"partículas" colisionantes) puede ser diferente antes y después de la colisión. En todo caso,la energía total (E) debe conservarse. La energía total E puede considerarse como la sumade la energía cinética total de las partículas (Ek = Ek1 + Ek2 + ...) y de las energías internas(Ei = Ei
1 + Ei2 + ...); esto es
[19.110]E Ek E i cte
de modo que el Q de la colisión viene dado por
[19.111]Q ΔEk ΔE i
Cuando es Q = 0, esto es, cuando no hay cambio en la energía cinética detraslación de las partículas colisionantes y, por lo tanto, tampoco hay cambio en laenergía interna, las colisiones son perfectamente elásticas. De no ser así, lascolisiones serán inelásticas.
Las colisiones inelásticas entre moléculas, átomos y núcleos pueden ser de dosclases. Cuando hay una disminución de la energía cinética de traslación, con elcorrespondiente aumento de la energía interna, esto es, cuando sea Q < 0, se dice quela colisión es endoenergética o de primera clase. En el caso contrario, cuando hayun aumento de la energía cinética de traslación, a expensas de una disminución dela energía interna, de modo que Q > 0, se dice que la colisión es exoenergética o desegunda clase. En las colisiones endoenergéticas se "consume" energía cinética detraslación; en las colisiones exoenergéticas se "libera" energía cinética de traslación.

574 Lec. 19.- Colisiones.
En las colisiones entre moléculas, átomos y núcleos puede ocurrir que las"partículas" que emergen de la colisión sean diferentes de las iniciales; las colisionesde estas características reciben el nombre de reacciones. Así, por ejemplo, cuandose bombardean los núcleos de Nitrógeno-14 con un haz de partículas alfa se puedeproducir la reacción:
[19.112]α 147 N → 17
8 O p
resultando un núcleo de Oxígeno-17 y un protón6.En las reacciones nucleares, la suma de los números atómicos (Z) iniciales es
igual a la de los números atómicos finales (conservación de la carga). También setiene que la suma de los números de masa (A) iniciales es igual a la de los númerosde masa finales. Pero la suma de las masas en reposo de los núcleos reaccionantesno es la misma antes y después de la reacción. En virtud de la ley de Einstein deequivalencia entre la masa y la energía (§11.11), la energía total de un núcleo enmovimiento en el referencial del laboratorio puede expresarse por
[19.113]E m0c2 Ek
donde el término m0c2 corresponde a la energía asociada con la masa en reposo (m0)
de dicho núcleo. Por consiguiente, para una reacción nuclear, en la que las"partículas" iniciales son distintas de las finales (incluso en número, en el caso másgeneral), el principio de conservación de la energía se expresa en la forma
[19.114]Ei
m0, i c2
iEk, i j
m0, j′ c2
jEk, j′ cte
y el Q de la reacción será
[19.115]Q
jEk, j′ i
Ek, i jm0, j′ i
m0, i c 2
o sea [19.116]Q ΔEk (Δm0) c 2
donde Δm0 es la diferencia entre la suma de las masas en reposo después y antes dela reacción. Si la suma de las masas en reposo finales excede a la de las masasiniciales, el Q de la reacción es negativo (reacción endoenergética) y habrá unadesaparición de energía cinética de traslación durante la reacción. Por el contrario,si la suma final es menor que la inicial, el Q será positivo (reacción exoenergética)y la energía asociada con la masa en reposo que "desaparece" la encontraremos comoenergía cinética de las partículas finales.
En la Física Nuclear, la masa se expresa corrientemente en unidades de masaatómica (u) y la energía en electrón-voltio (eV). La unidad de masa atómica se define
6 Esta fue la primera reacción nuclear en la que se identificó la transmutación de los átomos(RUTHERFORD, 1919). Las partículas alfa procedían de la emisión del Polonio.

§19.10.- Reacciones. 575
como la doceava parte de la masa del átomo de Carbono-12 neutro y en su estadofundamental; su equivalencia con el kg es la siguiente:
1 u = 1.660 531 × 10-27 kgEn virtud de la equivalencia masa-energía, la unidad de masa atómica equivale a
1.660 531 × 10-27 kg × (2.997 925 × 108)2 (m/s)2 == 1.492 411 × 10-10 J = 9.314 812 × 108 eV = 931.481 MeV
o sea 1 u = 931.481 MeV/c2
Ejemplo V.- Reacción nuclear.- En el caso de la reacción nuclear representada en [19.112], lasmasas en reposo de las diversas partículas implicadas son las siguientes:
4He = 4.002 603 u 1H = 1.007 825 u14N = 14.003 074 u 17O = 16.999 133 u__._______ __._______
18.005 677 u 18.006 958 u
lo que representa un aumento de masa en reposo deΔm0 = 0.001 281 u
de modo que la reacción es endoenergética, con un Q de
Q (Δm0) c 2 931.481 MeVu
× 0.001 281 u 1.20 MeV
§19.11. Umbral de reacción.- Supongamos que una partícula nuclear de masam1 y de energía cinética Ek1 incide sobre un núcleo atómico (m2) en reposo en elreferencial del laboratorio. Para que se produzca una reacción exoenergética no hayningún requisito en cuanto a la energía cinética mínima de la partícula incidente. Encambio, para que se produzca una reacción endoenergética, la partícula incidentedeberá tener una cierta energía cinética mínima que recibe el nombre de energíaumbral de reacción y que representaremos por Eumb.
En el referencial del centro de masa, las partículas incidente y blanco seaproximan entre sí con cantidades de movimiento iguales y opuestas. En el caso deque pueda producirse una reacción endoenergética, la energía cinética total en elSCM deberá ser mayor que el valor absoluto del Q de la reacción; la energía cinéticaen exceso aparecerá como energía cinética (en el SCM) de las partículas finales. Asípues, la energía umbral de reacción en el SCM es simplemente igual al valorabsoluto del Q de la reacción.
Por lo general, estaremos interesados en calcular la energía umbral de reacciónen el referencial de laboratorio. Es obvio que en el SL la energía umbral debe sermayor que Q , debido a que no toda la energía cinética de la partícula incidentepuede perderse en la colisión; como ya hemos visto, únicamente puede perderse,como mucho, la energía cinética asociada con el movimiento relativo entre laspartículas iniciales. Utilizaremos nuestros resultados previos [19.74], correspondientesa la pérdida de energía en las colisiones completamente inelásticas, para calcular laenergía umbral en el SL, ya que en dicho umbral las partículas finales no poseerán

576 Lec. 19.- Colisiones.
energía cinética en el SCM y se moverán juntas, como ocurre en aquel tipo decolisiones. Reescribiremos la ec. [19.74] en la forma
[19.117]ΔEk
m2
m1 m2
Ek
donde Ek representa la energía cinética inicial de la partícula incidente, que ennuestro caso representa la energía umbral de reacción Eumb. Entonces, y puesto quees Q = ΔEk, tenemos
[19.118]Qm2
m1 m2
Eumb ⇒ Eumb
m1 m2
m2
Q
expresión que es válida si Q es negativo (reacción endoenergética), ya que no existeumbral de reacción cuando Q es positivo (reacción exoenergética).
§19.12. Ecuación del Q.- En las reacciones se cumplen las leyes deconservación de la cantidad de movimiento y de la energía, siempre que tengamosen cuenta las energías internas de las "partículas" colisionantes. Consideremos el casode una partícula incidente (m1) sobre una partícula blanco (m2) y que, como resultadode la reacción, emerjan dos partículas (m′1 y m′2) formando ángulos θ1 y θ2 con ladirección inicial del movimiento de m1; escribiremos
[19.119]
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
p1 p1′ cosθ1 p2′ cosθ2
0 p1′ senθ1 p2′ senθ2
p 21
2m1
Qp1′
2
2m1′p2′
2
2m2′
de modo que, si se conocen las masas
Figura 19.19
de las partículas, es posible calculartres cualesquiera de las cantidades p1,p′1, p′1, θ1, θ2 y Q en función de lasotras tres.
Presenta particular interés expre-sar el Q de la reacción en función dep1, p′1 y θ1, ya que la primera de estascantidades suele conocerse y las otras
dos pueden medirse fácilmente en muchos casos. Dejamos al cuidado del alumnodemostrar que
[19.120]Q 12
⎛⎜⎜⎝
⎞⎟⎟⎠
1m1′
1m2′
p1′2 1
2
⎛⎜⎜⎝
⎞⎟⎟⎠
1m2
1m1
p 21
1m2′
p1 p1′cosθ1
o bien

§19.12.- Ecuación del Q. 577
[19.121]Q⎛⎜⎜⎝
⎞⎟⎟⎠
1m1′m2′
Ek1′⎛⎜⎜⎝
⎞⎟⎟⎠
1m1
m2′Ek1
2m2′
m1m2′Ek1Ek1′ cosθ1
resultado conocido como la ecuación del Q y que tiene muchas aplicaciones en laFísica Nuclear.
Problemas
19.1.- Una pelota de béisbol, de 150 g demasa, se mueve con una velocidad de 36 m/sun instante antes de ser golpeada por el bate,invirtiéndose su velocidad después del golpe.a) Calcular la percusión producida por el batesobre la pelota. b) Suponiendo que el batehaya estado en contacto con la pelota durante0.001 s, calcular la fuerza media ejercida sobrela pelota durante la colisión y compararla conel peso de ésta.
19.2.- Una pelota cae desde una cierta alturasobre un suelo duro y horizontal. Sea v lavelocidad de la pelota en el instante de colisio-nar con el suelo y e el coeficiente de restitu-ción de la colisión. a) Demostrar que la pelotarecibe una percusión dada por
Π (1 e) mv
b) Demostrar que el cambio de energía cinéti-ca de la pelota viene dado por
ΔEk ( 1 e 2 ) Ek
19.3.- Dejamos caer una pelota, desde unaaltura de 10 m, sobre un suelo duro y horizon-tal. Se observa que la pelota remonta hasta unaaltura de 8.1 m después del primer bote en elsuelo. Supongamos que el coeficiente derestitución permanezca constante en los rebotessucesivos. a) Calcular el valor del coeficientede restitución en los rebotes. b) ¿Qué fracciónde la energía se pierde en cada rebote?c) ¿Cuántos botes dará la pelota antes de quesu altura de remonte se reduzca a 10 cm?d) Calcular el tiempo que deberá transcurrirantes de que la pelota quede en reposo y el
espacio total que habrá recorrido hasta eseinstante.
19.4.- Con un cañoncito de juguete situadosobre el suelo se dispara una bolita con unavelocidad v0 que forma un ángulo θ0 con lahorizontal. La bolita rebota una y otra vezsobre el suelo horizontal y liso. Sea e = cte elcoeficiente de restitución. a) Describir el movi-miento de la bolita. b) Calcular la relaciónexistente entre los alcances en dos rebotessucesivos. c) Calcular el alcance total de labolita antes de que deje de rebotar sobre elsuelo.
19.5.- Una pelota de ping-pong rebota escale-
Prob. 19.5
ras abajo, escalón por escalón, como se mues-tra en la figura adjunta. Se observa que lapelota siempre rebotaen el centro de cadaescalón y después decada bote se elevajustamente hasta elnivel del escalón ante-rior. Supongamos quetanto la altura como laprofundidad de cadaescalón sean de 30 cm.a) Calcular el valor delcoeficiente de restitu-ción entre la pelota y la superficie de losescalones. b) Calcular la velocidad de la pelotaen los puntos más altos de sus trayectoriasparciales.
19.6.- Dos péndulos simples, de masa respec-tivas m1 y m2, ambos de longitud l, estánsuspendidos de un mismo punto. Se separa unode ellos de la vertical (manteniéndose el hilotenso) hasta que se obtiene una diferencia de

578 Lec. 19.- Colisiones.
alturas h entre ambas masas pendulares. Sesuelta dicho péndulo de modo que colisionecon el otro. Suponiendo que la colisión seacompletamente inelástica, ¿a qué altura seelevará el conjunto después de la colisión?
19.7.- Dos peque-
Prob. 19.7
ñas esferas, demasas respectivasm y 2m, cuelgan deun punto comúnmediante sendoshilos de longitud l,como se indica enla figura. La esfera2m se encuentra enreposo y la esferam se abandona apartir de la posición que se indica, de modoque tenga lugar una colisión frontal y perfecta-mente elástica entre ambas esferas. a) Determi-nar la altura a la que ascenderá cada esferadespués del primer choque. b) Ídem despuésdel segundo choque.
19.8.- Tres esferas perfectamente elásticas,cuyas masas respectivas son 5m, m y 5m, estáncolocadas en ese orden sobre un carril recto yhorizontal, muy largo. Inicialmente, la esferaque está en medio se está moviendo con unavelocidad v0 y las otras dos están en reposo.Supóngase que todas las colisiones sean fron-tales, "lisas" y perfectamente elásticas. a) De-terminar el número total de colisiones quetendrán lugar y las velocidades finales de lasesferas. b) Comprobar que la energía cinéticafinal es igual que la inicial.
19.9.- Consideremos dos partículas, de masasrespectivas m1 y m2, que efectúan una colisiónelástica frontal, de modo que sus velocidadesantes de la colisión sean v1 y v2 = γv1, con γ≠0.Supongamos que fuesen iguales las energíascinéticas iniciales de las partículas. Calcular elvalor (o valores) que deberá tener el parámetroγ para que la partícula "1" quede en reposodespués de la colisión y la relación entre lasmasas de ambas partículas para que seaposible esa situación.
19.10.- a) Un elevador está subiendo por elcubo (hueco de la escalera) con una velocidadconstante de 1.83 m/s. En el instante en que eltecho del elevador se encuentra a 18.3 m de laparte más alta del cubo, se deja caer desde esesitio una pelota ligera que rebotará elástica-mente en el techo del ascensor. ¿A qué alturasubirá la pelota por encima del lugar desde elque se dejó caer? b) Resolver el mismo pro-blema suponiendo que el ascensor esté bajandocon una velocidad de 1.83 m/s.
19.11.- En el aparato que se muestra en la
Prob. 19.11
figura adjunta se han dispuesto n bolas deacero suspendidas mediante hilos ligeros demodo que sus centros se encuentran situadossobre una misma línea recta horizontal y queno están unas en contacto con las otras. Lamasa de la primera bola es fm0 , con f<1, la dela segunda es f 2m0, ... y así hasta la bola n-ésima, cuya masa será f nm0. Una bola de masam0, que se mueve horizontalmente con unavelocidad v0, colisiona frontalmente con laprimera de las bolas suspendidas; se produceasí una sucesión de colisiones a lo largo de lalínea de bolas. Supóngase que todas las coli-siones sean perfectamente elásticas. a) Demos-trar que la última bola sale despedida con unavelocidad
vn⎛⎜⎝
⎞⎟⎠
21 f
n
v0
b) Demostrar que si el valor de f es muypróximo a la unidad, este sistema puede utili-zarse para transmitir prácticamente toda laenergía cinética de la bola incidente a laúltima de las bolas suspendidas. c) Calcular lamasa, velocidad y energía cinética de la bolan-ésima en función de la masa, velocidad yenergía cinética de la bola incidente, paraf = 0.95 y n = 25. d) Comparar estos resulta-dos con los que se obtendrían si se consideraseuna colisión directa entre la bola incidente y labola n-ésima.
19.12.- Suponiendo que el choque entre unpalo de golf y la pelota sea perfectamenteelástico y que la masa de la pelota sea muchomenor que la del palo, demostrar que lavelocidad de la pelota después de ser golpeadaes aproximadamente el doble de la que llevabala cabeza del palo un instante antes del impac-to.
19.13.- Péndulo balístico. Una forma sencillade determinar la velocidad de un proyectilconsiste en la utilización del péndulo balístico.Este péndulo está constituido por un bloque

Problemas 579
grande de madera, de masa M, suspendido
Prob. 19.13
mediante dos hilos verticales, como se ilustraen la figura. El proyectil, de masa m, cuyavelocidad v se quiere determinar, se disparahorizontalmente de modo que choque y quedeincrustado en el bloque de madera. Si eltiempo que emplea el proyectil en quedardetenido en el interior del bloque de madera espequeño en comparación con el periodo deoscilación del péndulo (bastará con que loshilos de suspensión sean suficientementelargos), los hilos de suspensión permaneceráncasi verticales durante la colisión. Supongamosque el centro de masa del bloque asciende auna altura h después de la colisión. Calcular:a) La velocidad que llevaba el proyectil; b) lafracción de la energía cinética inicial que sedisipa. Aplicación numérica: M = 3 kg, m =10 g y h = 4 cm.
19.14.- Un bloque de madera, de 2 kg de
Prob. 19.14
masa, está unido a la pared mediante unmuelle cuya constante elástica es k = 300 N/m,y descansa sobre una superficie horizontal lisa,como se muestra en la figura adjunta. Cuandose dispara un proyectil de 25 g de masa contrael bloque, el proyectil queda incrustado en elbloque y el muelle se comprime 15 cm.a) Calcular la velocidad inicial del proyectil.b) ¿Qué fracción de la energía cinética delproyectil se pierde en la colisión?
19.15.- a) Demostrar que la máxima transfe-rencia de energía cinética desde la partículaincidente (m1) a la partícula blanco (m2, enreposo en el SL) durante una colisión frontalparcialmente elástica (e≠1) se produce cuandola razón entre las masas de las partículas esm1/m2 = e. b) Calcular la fracción máxima dela energía cinética de la partícula incidente que
puede transferirse a la otra en las condicionesdel apartado anterior.
19.16.- Un disco circular, de 20 g de masa y4 cm de radio, desliza inicialmente sobre untablero liso y horizontal con una velocidad de10 cm/s y colisiona oblicuamente, con un pará-metro de impacto b = 5 cm, con otro discocircular, de 40 g de masa y 6 cm de radio, quese encontraba en reposo sobre el tablero.Calcular las velocidades (módulo y dirección)de los dos discos después de la colisión en elsupuesto de que ésta sea: a) perfectamenteelástica, b) inelástica, con un coeficiente derestitución e = 0.8, c) inelástica, con unapérdida de energía cinética del 18% yd) completamente inelástica.
19.17.- Reconsideremos el Ejemplo I (pág.550) de esta Lección; pero supongamos que laesfera m2 se esté moviendo inicialmente conuna velocidad v2 en la misma dirección ysentido que la esfera m1, de modo que tengalugar una colisión no frontal entre ambasesferas. Encontrar las expresiones de lasvelocidades (módulos y direcciones) con quese moverán ambas esferas después de la coli-sión, expresando los resultados en función delcoeficiente de restitución e y del ángulo β queforma la línea de los centros de ambas esferas,en el instante en que están en contacto, con ladirección inicial de los movimientos.
19.18.- Dos discos lisos idénticos, de 2 cm de
Prob. 19.18
radio y 10 g de masa, deslizan sin fricciónsobre una mesa de aire con velocidades res-pectivas de 6 m/s y 3 m/s en la misma direc-ción sobre trayectorias rectilíneas separadaspor una distancia de 1 cm, como se indica enla figura. Suponiendo que la colisión seaperfectamente elástica, calcular las velocidadesfinales de cada disco, especificando el móduloy la dirección de cada una de ellas.
19.19.- Supongamos ahora que los dos discosdel Problema 19.16 se muevan uno hacia elotro, sobre trayectorias paralelas y parámetrode impacto b = 5 cm, con velocidades respecti-vas de 7 cm/s y 3 cm/s. Calcular las velocida-des y direcciones en que salen dos discosdespués de la colisión en los supuestos si-guientes: a) si la colisión es perfectamenteelástica y b) si la colisión es inelástica, con e

580 Lec. 19.- Colisiones.
= 0.8. c) ¿Qué fracción de la energía cinéticase pierde en el caso del apartado (b). d) Com-parar los resultados con los obtenidos en elProblema 19.16 y sacar las consecuenciasoportunas. NOTA: Recomendamos resolvereste problema por dos procedimientos distin-tos: i) utilizando los resultados del Proble-ma 19.17 y ii) utilizando el referencial en elque el disco "2" se encuentra inicialmente enreposo y sirviéndose de los resultados obteni-dos en el Problema 19.16.
19.20.- Un niño, que se encuentra jugando a laC
M
Y
CM
MY
CY
CMY
K
Acr51F.pdf 04/11/2006 04:49:22
Prob. 19.20
pelota en la acera de una calle, arroja horizon-talmente su pelota, con una velocidad v1,contra la parte trasera de una furgoneta dereparto que circula por la calle, con unavelocidad v2. La pelota rebota en la puertatrasera (vertical) de la furgoneta, siendo e elcoeficiente de restitución entre la pelota y lapuerta. Demostrar que entre el ángulo deincidencia (θ) y el de rebote (θ′), ambosmedidos en el referencial de la calle, existe larelación
tgθ′ senθ
(1 e)v2
v1
e cosθ
Sugerencia: Resolver este problema en elreferencial en el que la furgoneta está enreposo, y después transformar los resultados alreferencial de la calle.
19.21.- Un reactor nuclear utiliza grafito comomoderador. Consideremos una colisión frontalperfectamente elástica de un neutrón de1 MeV de energía cinética con un núcleo deCarbono-12 del moderador. a) ¿Qué fracciónde su energía cinética pierde el neutrón en esacolisión? b) ¿Cuántas colisiones de ese tipotendrá que realizar el neutrón para que suenergía cinética se reduzca a 1 keV?
19.22.- Dos objetos de la misma masa se mue-ven con la misma celeridad sobre trayectoriasrectilíneas y efectúan una colisión completa-
mente inelástica, de modo que después de lacolisión se mueven unidos con una celeridadque es igual a un tercio de la inicial de cadauno de ellos. Calcular el ángulo que formabanentre sí las trayectorias iniciales de los objetos.
19.23.- Un disco desliza sobre una superficie
Prob. 19.23
horizontal lisa, con una celeridad de 5 m/s, ycolisiona elásticamente con otros discos idénti-cos, que se encontraban en reposo, en contactoentre sí y colocados de modo que la línea desus centros era perpendicular a la trayectoriadel disco incidente, como se muestra en elfigura adjunta. El disco incidente se apuntódirectamente al punto de contacto de los otrosdos. Calcular las velocidades (módulos ydirecciones) de los tres discos después de lacolisión.
19.24.- Una partícula que se mueve con unavelocidad v1 colisiona con otra partícula idénti-ca que se encontraba inicialmente en reposo yse dispersa bajo un ángulo θ1 con una veloci-dad v′1. Demostrar que el ángulo de retrocesode la otra partícula viene dado por
tgθ2
senθ1
v1
v1′cosθ1
con independencia de que la colisión seaelástica o inelástica.
19.25.- Una bola de billar, que se mueve sobrela mesa con una velocidad de 2 m/s, colisionaoblicuamente con otra bola idéntica que seencontraba en reposo. Después de la colisiónse observa que una de las bolas se mueve conuna velocidad de 1.5 m/s en una dirección queforma un ángulo de 30° con la dirección delmovimiento inicial de la bola incidente.a) Determinar la velocidad (módulo y direc-ción) de la otra bola después de la colisión.b) Decir si la colisión es elástica o no.
19.26.- a) Calcular el ángulo máximo bajo elque puede ser dispersada una partícula alfa porun protón que se encontraba en reposo en elreferencial del laboratorio. b) Ídem un protónpor un electrón estacionario.

Problemas 581
19.27.- Una partícula de masa m colisiona conotra partícula de masa 3m que se encontrabainicialmente en reposo en el referencial dellaboratorio. La partícula incidente sale disper-sada bajo un ángulo de 35°, en tanto que laotra partícula retrocede bajo un ángulo de 65°.a) Calcular el cociente entre las energíascinéticas de las dos partículas después de lacolisión. b) ¿Se trata de una colisión elástica?En caso negativo, calcular la fracción de laenergía cinética inicial que se pierde durante lacolisión y el valor del coeficiente de restitu-ción.
19.28.- El físico inglés James CHADWICK
Prob. 19.28
(1891-1974) demostró en 1932 la existencia ypropiedades del neutrón con un dispositivoexperimental cuyo esquema presentamos en lafigura adjunta. Este dispositivo consiste en unacámara de vacío en la que se ha colocado unamuestra de Polonio, sustancia radiactiva queemite partículas alfa. Con estas partículas alfase bombardea una lámina de Berilio, produ-ciéndose la reacción nuclear:
α 9 Be → 12 C n
con emisión de neutrones. Estos neutronesinciden sobre una lámina delgada de parafina(sustancia muy hidrogenada) y efectúan coli-siones elásticas con los núcleos de los átomosde Hidrógeno (protones). Los protones des-prendidos de la lámina de parafina son detec-tados con una cámara de ionización.
a) Encontrar la expresión de la velocidadmáxima que pueden adquirir los protones enfunción de la masa mn y de la velocidad vn delos neutrones incidentes. b) Uno de los objeti-
vos de Chadwick era determinar la masa delneutrón. Sin embargo, la experiencia anteriorno es suficiente para alcanzar ese objetivo, yaque en la expresión que hemos encontrado enel apartado anterior aparecen dos incógnitas,mn y vn (vp puede medirse en la cámara deionización). Para resolver este problema, Chad-wick sustituyó la lámina de parafina por otrade paracianógeno (sustancia nitrogenada), demodo que los neutrones pudieran realizarcolisiones elásticas con el Nitrógeno. Natural-mente, la expresión que encontramos en elapartado (a) sigue siendo válida para lascolisiones con el Nitrógeno, sin más quesustituir vp y mp por vN y mN, respectivamente.Las velocidades medidas por Chadwick fueron
vp = 3.30 × 107 m/s vN = 0.47 × 107 m/s
¿Cuál es la masa del neutrón? Comparar elresultado obtenido con el valor aceptado mn =1.008 665 u. DATOS: mp = 1.007 825 u ym(14N) = 14.003 074 u.
19.29.- Un protón es dispersado elásticamentebajo un ángulo de 47° por un núcleo estaciona-rio que retrocede bajo un ángulo de 65°.Calcular la masa atómica de dicho núcleo y lafracción de energía cinética que es transferidaal mismo.
19.30.- Un haz de partículas se mueve a travésde un gas y se observa una deflexión máximade cualquiera de las partículas del haz delorden de 15°. ¿Cuál es la razón entre la masade las partículas incidentes y la masa de lasmoléculas del gas? Supóngase que la velocidadde las moléculas del gas debida a la agitacióntérmica sea despreciable en comparación conla velocidad de las partículas del haz.

582 Lec. 19.- Colisiones.
19.31.- Demostrar que en las colisiones elásti-cas entre una partícula incidente y un blancoen reposo en el referencial del laboratorio lasdirecciones en que se mueven las partículasdespués de la colisión forman entre sí unángulo θ = θ1 + θ2 dado por
tgθm1 m2
m1 m2
cotg ψ2
donde ψ es el ángulo de dispersión en el SCM.
19.32.- Una partícula, de 10 g de masa, semueve con una velocidad de 50 m/s en elinstante en que colisiona elásticamente conotra partícula que se encontraba inicialmenteen reposo. Después de la colisión, la partículaincidente sale dispersada en una dirección queforma un ángulo de 45° con la direccióninicial de su movimiento, con una velocidad de25 m/s. a) Calcular la masa, la velocidad y elángulo de retroceso de la partícula blanco.b) ¿Serían posibles algunos de los siguientesángulos de dispersión: 30°, 40°, 50°, 60°? ¿Porqué?
19.33.- En una experiencia de colisión elásticaentre dos partículas, una de las cuales seencontraba en reposo en el referencial dellaboratorio, se han podido medir los ángulosde dispersión y de retroceso, así como laceleridad final de la partícula dispersada; losresultados obtenidos han sido los siguientes:8.54°, 67.5° y 95.2 m/s, respectivamente. Conestos datos, calcular: a) la relación existenteentre las masas de las partículas; b) la veloci-dad inicial de la partícula incidente y la veloci-dad de la partícula de retroceso; c) lavelocidad del centro de masa; d) las velocida-des de las partículas en el SCM y el ángulo dedispersión en dicho sistema. e) Dibujar los dia-gramas vectoriales oportunos y discutir losresultados sirviéndose de esos diagramas.
19.34.- Una partícula de masa m1 incide conuna velocidad de 100 m/s sobre otra partículade masa m2 = m1/4 que se encontraba enreposo en el referencial del laboratorio. Su-pongamos que la colisión sea perfectamenteelástica. a) ¿Cuál es el valor máximo delángulo de dispersión en el SL? ¿Ídem en elSCM? b) ¿Qué ángulo de retroceso corres-ponde a ésta situación límite? c) Calcular lasvelocidades finales de las partículas en losreferenciales SL y SCM. d) Dibujar los dia-gramas oportunos y discutir los resultados.
19.35.- Una partícula de masa m1 colisiona conotra partícula estacionaria (en el SL) de masam2. a) Dibujar los diagramas vectoriales
correspondientes a las posibilidades siguientes:i) m1 = m2, colisión elástica; ii) m1 < m2,colisión elástica; iii) m1 > m2, colisión elástica;iv) m1 = m2, colisión inelástica; v) m1 < m2,colisión inelástica; vi) m1 > m2, colisión inelás-tica. b) Si las velocidades finales de laspartículas forman entre sí un ángulo agudo,¿cuáles de las posibilidades anteriores puedenser correctas?
19.36.- El efecto de COMPTON se interpretacomo el resultado de las colisiones elásticasentre fotones de rayos X y electrones libres.De acuerdo con la teoría cuántica, un fotón delongitud de onda λ posee una energía hc/λ yuna cantidad de movimiento h/λ, donde h es laconstante de Planck y c es la velocidad de laluz. En el efecto de Compton, un haz incidentede rayos X, de longitud de onda λ y direcciónconocida, se dispersa al atravesar la materia yla radiación dispersada en una direcciónθ1 tiene una longitud de onda λ′, mayor que λ,que es función del ángulo de dispersión.a) Escribir las expresiones que expresan laconservación de la cantidad de movimiento yde la energía en el efecto de Compton. b) De-mostrar que la variación de longitud de ondaentre el fotón primario y el secundario (disper-sado) en el efecto de Compton viene dada por
Δλ λ′ λ hmc
(1 cosθ1)
donde m es la masa del electrón. c) Demostrarque el electrón retrocede en una dirección queforma un ángulo θ2 con la dirección del fotónincidente dado por
tgθ2
senθ1
(1 cosθ1) (1 hλmc
)
19.37.- Supongamos que disponemos de dosaceleradores de partículas que nos proporcio-nan haces de partículas y de la misma energíaque se mueven en sentido opuesto y quecolisionan en un punto. ¿Cuál deberá ser laenergía cinética físicamente equivalente de unhaz de partículas, suministradas por un soloacelerador y que colisionen con partículasidénticas en reposo? (Considérense tan sólovelocidades no relativistas).
19.38.- Una partícula de masa m1 y de energíacinética Ek1 choca con otra partícula de masam2 que está en reposo en el SL. Se produceuna reacción de la que resultan dos partículasde masas m′1 y m′2 que salen en direcciones que

Problemas 583
forman ángulos θ1 y θ2, respectivamente, conla trayectoria inicial de la partícula incidente.Demostrar que el Q de la reacción puedeexpresarse en función de las masas, de losángulos y de la energía cinética inicial me-diante la expresión
Q Ek1
⎛⎜⎝
...
⎞⎟⎟⎠
...(m1/m1′)sen2θ2 (m1/m2′)sen2θ1
sen2(θ1 θ2)1
19.39.- La energía de disociación de la molé-cula de Hidrógeno (H2) es 4.48 eV. Suponerque ha de realizarse la disociación de la molé-cula de Hidrógeno mediante la colisión con unprotón. ¿Qué empleará más energía, bombar-dear moléculas de Hidrógeno estacionarias conprotones, o bombardear protones estacionarioscon moléculas de Hidrógeno? Calcular laenergía umbral en cada una de esas reacciones.
19.40.- La energía de ionización del átomo deLitio (Z = 3, A = 7) es 5.39 eV. Calcular laenergía umbral para la ionización del átomo deLitio mediante su bombardeo con protones.
19.41.- Calcular la energía cinética mínimaque debe tener la partícula incidente en el SLpara que puedan producirse las reaccionesnucleares siguientes:
16O(n,α)13C 3H(n,D)2D
27Al(α,n)30P 7Li(p,α)4He
DATOS: Masas atómicas:
m(n) = 1.008 665 u
m(3He) = 3.016 030 u
m(13C) = 13.003 354 u
m(1H) = 1.007 825 u
m(4He) = 4.002 603 u
m(16O) = 15.994 915 u
m(2H) = 2.014 102 u
m(7Li) = 7.016 004 u
m(27Al) = 26.981 539 u
m(30P) = 29.978 317 u
19.42.- Un núcleo de Torio-232 en reposo sedesintegra emitiendo una partícula alfa ydejando un núcleo residual de Radio-228.
Calcular: a) El Q de este proceso de desinte-gración; b) la energía cinética de la partículaalfa y del núcleo residual de retroceso; c) suscantidades de movimiento y sus velocidades.
DATOS: Masas atómicas:
m(228Ra) = 228.031 139 u
m(232Th) = 232.038 124 u

584 Lec. 19.- Colisiones.

Capítulo VI.
Dinámica del sólido rígido.
20.- Estática del sólido rígido. 587
21.- Dinámica del sólido rígido. 619
22.- Trabajo y energía en el movimiento
general del sólido rígido 655
23.- Ecuaciones de Euler. 679
24.- Dinámica impulsiva del sólido rígido. 697
Manuel R. Ortega Girón 585

586 Lecciones de Física

20.- Estática del sólido rígido.
§20.1. Estática (587); §20.2. Equilibrio del sólido rígido (588); §20.3. Fuerzas aplicadas aun sólido rígido (589); §20.4. Ecuaciones cardinales de la estática (590); §20.5. Centro degravedad (592); §20.6. Sistemas con ligaduras. Grados de libertad (594); §20.7. Estática delsólido rígido sujeto a ligaduras (596); §20.8. Diagrama del cuerpo libre (600);§20.9. Estática de un sistema de cuerpos rígidos (602); §20.10. Concepto de desplazamientovirtual (604); §20.11. Principio de los trabajos virtuales (605); Problemas (611)
§20.1. Estática.- La Dinámica es la parte de la Mecánica en la que se estudiala relación existente entre el movimiento de un cuerpo y sus causas. Nos enseña quedicho movimiento depende de la masa del cuerpo y de las acciones o fuerzas queejercen sobre él otros cuerpos que constituyen su medio ambiente. Los efectos dedichas fuerzas pueden contrarrestarse entre sí, dando lugar a una situación análogaa la que se presentaría si no actuase fuerza alguna sobre el cuerpo. El capítulo de laMecánica que estudia sólo aquellos sistemas en los que las fuerzas actuantes secontrarrestan, recibe el nombre de Estática.
La Estática está íntimamente relacionada con el concepto de equilibrio, y puededefinirse como aquella parte de la Mecánica que trata del equilibrio de los sistemasmateriales, entendiéndose por equilibrio aquella configuración del sistema materialque permanece invariable bajo la acción de un sistema de fuerzas. Esta definición nospresenta a la Estática como la parte de la Mecánica que estudia las condiciones quedeben satisfacer los sistemas de fuerzas para que al actuar sobre un sistema materialno se alteren los parámetros que determinan la posición y configuración de éste.
En una lección anterior nos ocupábamos de la Estática de la partícula y decíamosque ésta se encuentra en equilibrio en un referencial cuando es nula su aceleraciónen ese referencial. Esta definición de equilibrio implica que la resultante de todas lasfuerzas que actúan sobre la partícula debe ser nula; esto es
[20.1]Ri
F i 0
En definitiva, la partícula se encuentra en equilibrio, bajo la acción de un sistema defuerzas, si su estado de movimiento es el que corresponde a una partícula libre(ausencia de fuerzas); esto significa que su movimiento es rectilíneo y uniforme(aceleración nula).
Manuel R. Ortega Girón 587

588 Lec. 20.- Estática del sólido rígido.
¿Qué entendemos por equilibrio de un sólido rígido? ¿Cuáles deberán ser lascondiciones que satisfagan las fuerzas que actúen sobre él para que el equilibrio seaposible? La respuesta a estas dos preguntas es el objetivo fundamental de estalección.
§20.2. Equilibrio del sólido rígido.- Contestaremos a la primera de las dospreguntas anteriores estableciendo una analogía entre el equilibrio de la partícula yel del sólido rígido, hasta donde ello sea posible. De ese modo, diremos que el sólidorígido se encuentra en equilibrio bajo la acción de un sistema de fuerzas si su estadode movimiento es el que correspondería a un sólido rígido libre de acción exterior;pero ¿qué tipo de movimiento presenta el sólido rígido libre?
Sabemos que el movimiento más general de un sólido rígido es el rototraslatorio;esto es, compuesto de una rotación y una traslación. Sabemos, además, que el centrode masa del sólido rígido (al igual que el de cualquier sistema material) se muevecomo si la resultante de todas las fuerzas que actúan sobre el sólido rígido estuviesenaplicadas en él. En ausencia de fuerzas, el centro de masa del sólido rígido se muevecon velocidad constante (movimiento rectilíneo y uniforme). Así pues, el sólidorígido se encuentra en equilibrio de traslación en un referencial cuando la aceleraciónde su centro de masa es nula en ese referencial.
En cuanto al equilibrio de rotación no podemos seguir con la misma analogía (yaque la partícula no rota). Veremos en las lecciones siguientes que cuando un sólidorígido utiliza uno de sus ejes principales de inercia como eje de rotación no muestratendencia alguna a abandonar ese eje y no ejerce reacciones sobre los apoyos delmismo. Por esa razón los ejes principales del sólido reciben también el nombre deejes libres. Veremos también que en esas condiciones el movimiento de rotación delsólido continúa sin necesidad de la intervención de momentos externos; su momentoangular permanece constante y, al serlo también su momento de inercia, su velocidadangular también será constante. Así, podemos definir el equilibrio de rotación delsólido rígido como la ausencia de aceleración angular con respecto a cualquier ejelibre y fijo (en cuanto a su orientación en el espacio, sin descartar la posibilidad deque dicho eje se traslade paralelamente a sí mismo) en un cierto referencial.
Las definiciones dadas anteriormente para los equilibrios de traslación y derotación no exigen que el cuerpo se encuentre en reposo en el referencial elegido,sino solamente que no tenga aceleración (de traslación y angular, respectivamente)en dicho referencial. Así, el sólido rígido en equilibrio puede estar moviéndose demodo que su centro de masa lo haga con velocidad constante (vcm = cte) y que larotación tenga lugar en torno a un eje libre de orientación fija en el espacio convelocidad angular constante (ω = cte). Si el sólido está realmente en reposo en elreferencial elegido, esto es si vcm = 0 y ω = 0, diremos que su equilibrio es estático.Sin embargo, como veremos posteriormente, las condiciones que deben satisfacer lossistemas de fuerzas que actúen sobre el cuerpo son las mismas ya sea que el cuerpose encuentre en equilibrio estático o no-estático.
Por otra parte, conviene destacar que en principio la Estática no presupone laelección de un referencial inercial, ya que un observador situado en un referencial no-inercial detectaría unas fuerzas que actuarían sobre el cuerpo y que provienen de lafalta de inercialidad de su referencial (las fuerzas de inercia) que para él son tan
§20.2.- Equilibrio del sólido rígido. 589
legítimas y tan activas como las demás fuerzas que puedan actuar sobre el cuerpo yque provengan de la presencia de otros cuerpos en sus cercanías.
§20.3. Fuerzas aplicadas a un sólido rígido.- Con anterioridad hemos defi-nido el sólido rígido como aquel sistema de partículas en el que la distancia entre doscualesquiera de ellas permanece invariable en el transcurso de cualquier procesofísico. Esta definición es sólo conceptual, por cuanto que el sólido rígido, en todorigor, no existe, ya que todos los cuerpos reales se deforman siempre, en mayor omenor grado, bajo la acción de las fuerzas. Sin embargo, si esas fuerzas sonsuficientemente poco intensas, las deformaciones que producen al actuar sobre ungran número de cuerpos reales son despreciables; dichos cuerpos serán consideradoscomo rígidos o indeformables. En ese sentido, el sólido rígido es sólo unaidealización y extrapolación (para fuerzas poco intensas) del sólido real.
¿Cómo se comportan las fuerzas que actúan sobre un sólido rígido? En laslecciones anteriores hemos insistido en el carácter vectorial de las fuerzas y hemosvisto que cuando varias fuerzas actúan sobre una partícula, el efecto de todas ellasen conjunto es el mismo que produciría una única fuerza resultante que es la sumavectorial de todas ellas (principio de superposición). No encontrábamos ningunadificultad para efectuar dicha suma al estar todas las fuerzas aplicadas a un mismopunto.
En cambio, en el caso de un sólido rígido, las fuerzas que actúan sobre él estaránaplicadas en distintos puntos del sólido y sólo la experiencia nos permitirá establecerel método que debemos seguir para reducir el sistema de fuerzas a otro más sencillo.Experimentalmente se pueden comprobar los dos postulados siguientes, sobre los quecimentaremos la Estática del Sólido Rígido:
(1) Carácter vectorial de las fuerzas.- Un sistema de fuerzas que actúasobre un mismo punto de un sólido rígido puede ser sustituido por unafuerza única, la resultante del sistema, obtenida sumando vectorialmentetodas las fuerzas que constituyen el sistema (Figura 20.1a). O sea
[20.2][20.2]Ri
F i
(2) Condición estática de rigidez.- Los efectos producidos por dos fuerzasiguales y opuestas, F y -F, que actúan sobre una misma recta directriz, seneutralizan mutuamente, aun cuando no estén aplicadas a un mismo puntodel sólido rígido.
En efecto, puesto que la distancia entre los puntos A y B (Figura 20.1b) debe permanecer invariable ypuesto que el único efecto que pueden producir tales fuerzas es un desplazamiento a lo largo de la rectaAB, los efectos respectivos deberán neutralizarse.
Admitidos los dos postulados anteriores, también deberemos admitir que:
Las fuerzas aplicadas a un sólido rígido puedan representarse mediante vec-tores deslizantes.
En efecto, si consideramos un sólido rígido sometido a la acción de una fuerza F, aplicada en el punto A,el primer postulado nos permite añadir dos fuerzas iguales y opuestas, F y -F, del mismo módulo y conla misma recta de acción que la dada pero aplicadas en un punto B, sin que con ello se modifique el estadode equilibrio o de movimiento del cuerpo (Figura 20.1c). Entonces, de acuerdo con el segundo postulado,

590 Lec. 20.- Estática del sólido rígido.
las fuerzas F y -F, aplicadas respectivamente en los puntos A y B, neutralizan sus efectos y el resultado
Figura 20.1
neto es que nos queda sólo la fuerza F aplicada en el punto B, que podemos considerarla como el resultadode deslizar la fuerza original F aplicada en A a lo largo de su recta de acción.
Los dos postulados en los que hemos cimentado la Estática apoyan su validez enel hecho de que todas las consecuencias que de ellos se derivan son corroboradas porla experiencia. En virtud de ellos y de la conclusión que de ellos hemos obtenidoreferente al carácter deslizante de los vectores que representan a las fuerzas, todas laspropiedades estudiadas en la Lección 2 para los vectores deslizantes serán igualmenteaplicables a los sistemas de fuerzas que actúen sobre un sólido rígido; por ello excu-samos aquí la repetición de aquellas propiedades.
En definitiva,
el sistema de fuerzas aplicadas a un sólido rígido está representado por unsistema de vectores deslizantes respecto al cuerpo al que están aplicadas.
Es más, admitimos que sistemas de vectores equivalentes representan a sistemasde fuerzas equivalentes; esto es, que modifican de igual modo el estado de equilibrioo de movimiento de los sistemas rígidos sobre los que se aplican.
§20.4. Ecuaciones cardinales de la estática.- Consideremos un sólido rígidosobre el cuál actúa un sistema de fuerzas. De la definición dada anteriormente parael equilibrio del sólido rígido y del carácter vectorial y deslizante de las fuerzasaplicadas al sólido se sigue que:
La condición necesaria y suficiente para que un sólido rígido se encuentreen equilibrio bajo la acción de un sistema de fuerzas es que dicho sistemade fuerzas sea equivalente a cero.
El enunciado anterior significa que la resultante general y el momento resultantegeneral (con respecto a cualquier punto del espacio) deben ser nulos. Esto es, lascondiciones de equilibrio del sólido rígido pueden expresarse por las llamadasecuaciones cardinales de la Estática:

§20.4.- Ecuaciones cardinales de la estática. 591
[20.3]Ri
F i 0 Mi
M i 0
La ec. [20.3a] se refiere al equilibrio de traslación del sólido. Al ser nula laresultante del sistema de fuerzas aplicado al sólido, el centro de masa del mismoestará en reposo o moviéndose con velocidad constante.
La condición expresada por la ec. [20.3b] se refiere al equilibrio de rotación. Alser nulo el momento de las fuerzas, con respecto a cualquier punto del espacio, segarantiza que el momento angular del sólido permanecerá constante, de modo que elcuerpo está o bien en reposo o bien girando con velocidad angular constante en tornoa un eje principal que mantiene su orientación fija en el espacio.
El momento resultante M en la ec. [20.3b], que debe ser nulo para que existaequilibrio, deberá calcularse con respecto a un cierto centro de reducción O. Nospodemos preguntar si es indiferente el centro de reducción que escojamos.Recordemos que la resultante general de un sistema de vectores deslizantes esindependiente del centro de reducción elegido, pero que no sucede lo mismo con elmomento resultante general, que varía de un punto a otro. La relación existente entreMO y MO′ es
[20.4]MO′ M O O′O × R
de modo que si R = 0 (primera condición de equilibrio), entonces MO′ = MO, y si elmomento resultante es nulo con respecto a un centro de reducción O, también lo serácon respecto a cualquier otro punto O′. Por tanto, la condición [20.3b] bastaráverificarla para un solo punto del espacio, toda vez que se haya verificado lacondición [20.3a].
Las ecuaciones [20.3] son vectoriales, de modo que nos conducen a seisecuaciones escalares (tres por cada una de ellas), independientes, que deben satisfacerlas fuerzas aplicadas al sólido rígido para que éste se encuentre en equilibrio. Estasecuaciones son
[20.5]Rxi
Fi,x 0 Ryi
Fi,y 0 Rzi
Fi,z 0
[20.6]Mxi
Mi,x 0 Myi
Mi,y 0 Mzi
Mi,z 0
que establecen que la suma de las componentes de las fuerzas y de los momentos delas fuerzas (con respecto a un punto cualquiera) sobre cada uno de los ejes coorde-nados deben ser nulos para que haya equilibrio. Estas seis condiciones independientesentre sí se corresponden con los seis grados de libertad del sólido rígido (tres detraslación y tres de rotación).
Frecuentemente nos encontramos con problemas en los que todas las fuerzasactuantes son coplanarias. No habrá entonces inconveniente en tomar como plano xyel de coplanaridad, ya que de ese modo será Rz ≡ 0 (por ser nulas las componentesde las fuerzas en la dirección normal al plano de coplanaridad). Por otra parte,también serán nulos todos los momentos de las fuerzas con respecto a los ejes x e y(por ser coplanarias con ellos), de modo que Mx ≡ 0 y My ≡ 0, al igual que Rz ≡ 0,se cumplen idénticamente, y las condiciones de equilibrio se reducen a tres

592 Lec. 20.- Estática del sólido rígido.
[20.7]Rx 0 Ry 0 Mz 0
que se corresponden con los tres grados de libertad para el movimiento plano delsólido rígido (dos de traslación y uno de rotación).
Para completar nuestro estudio consideraremos los siguientes casos particulares:
(1) Un sólido rígido no puede estar en equilibrio bajo la acción de una solafuerza.
Obviamente, en estas condiciones no puede ser nula la resultante general. Ejemplo: cuerpo que caelibremente.
(2) El sólido rígido sólo podrá estar en equilibrio bajo la acción de dos fuer-zas si éstas son iguales y opuestas y tienen la misma recta de acción.
Si las dos fuerzas no tienen la misma recta de acción, aunque la resultante sea nula (equilibrio de trasla-
Figura 20.2
ción), el momento resultante no será nulo; en estas condiciones, el sistema constituye un par de fuerzasy no existe equilibrio de rotación.
El lector puede demostrar fácilmente (utilizando elteorema de Varignon) que:
(3) Si son tres las fuerzas aplicadas al sólidorígido, la condición de equilibrio implica queestas tres fuerzas (Figura 20.2) han de ser coplana-rias y concurrentes (el punto de concurrenciapuede estar eventualmente en el infinito).
Las condiciones de equilibrio [20.7] equivalen a ...
(4) ... la anulación del momento con respecto ados puntos y a la anulación de la suma de lascomponentes de las fuerzas en una direcciónque no sea perpendicular a la de la recta defi-nida por los dos puntos anteriormente citados(Problema 20.1).
(5) ... la anulación de los momentos con respecto a tres puntos no alineados(Problema 20.2).En ningún caso podemos obtener más de tres condiciones de equilibrio indepen-
dientes.
§20.5. Centro de gravedad.- Una de las fuerzas con las que estamos másfamiliarizados es aquélla que ejerce la Tierra sobre todos los cuerpos que están ensus proximidades; dicha fuerza recibe el nombre de peso del cuerpo. En realidad,para un cuerpo de dimensiones finitas, el peso no es estrictamente "una fuerza", sinola resultante de un gran número de ellas, ya que cada una de las partículas que loconstituyen está sometida a la atracción gravitatoria terrestre.
Consideremos un cuerpo de masa M que se encuentra en una región del espaciodonde existe un campo gravitatorio. La fuerza que actúa sobre cada una de laspartículas que lo constituyen viene dada por migi, donde mi representa la masa de lapartícula i-ésima y gi es la intensidad del campo gravitatorio en el punto donde se

§20.5.- Centro de gravedad. 593
encuentra dicha partícula. La fuerza total que
Figura 20.3
actúa sobre las N partículas que constituyen elcuerpo es, obviamente,
[20.8]Pi
mi g i
i.e., la resultante general de ese sistema de fuer-zas. Pero, ¿dónde está aplicada esa resultante?
Si la intensidad del campo gravitatorio, g,tiene el mismo valor en todos los puntos de unacierta región del espacio, decimos que el campogravitatorio es uniforme en dicha región. Para uncuerpo situado en un campo gravitatorio unifor-me, g tiene el mismo valor para todas las partícu-las que lo constituyen, de modo que las fuerzas gravitatorias individuales forman unsistema de vectores paralelos entre sí cuya resultante es P=Mg, i.e., el peso delcuerpo. El centro de ese sistema de vectores paralelos (§2.7) recibe el nombre decentro de gravedad y viene determinado por
[20.9]OG iFi OP i
iFi
iFi r i
iFi
r G
y puesto que Fi = mi g, o sea Fi = mi g, resulta
[20.10]r Gi
mi g r i
imi g
imi r i
imi
ecuación vectorial que nos determina la posición del centro de gravedad y queequivale a tres ecuaciones escalares
[20.11]xGi
mi xi
MyG
imi yi
MzG
imi zi
M
de modo que todas las fuerzas gravitatorias que actúan sobre las partículas queconstituyen un cuerpo pueden reemplazarse por una fuerza única, Mg, aplicada en elcentro de gravedad del cuerpo. Esto equivale a decir que los efectos de todas lasfuerzas gravitatorias individuales (sobre las partículas) pueden contrarrestarse por unasola fuerza, -Mg, con tal de que sea aplicada en el centro de gravedad del cuerpo,como se indica en la Figura 20.3.
En efecto, puesto que el momento de un sistema de vectores paralelos con respecto al centro delsistema es cero (por definición), el sistema es equivalente a un vector único (la resultante) aplicado endicho centro; entonces, para equilibrar el sistema bastará aplicar una fuerza en el centro de gravedad delcuerpo, de igual módulo, misma dirección y sentido opuesto a la resultante Mg.
Observaremos que las ecuaciones [20.10] y [20.11] son también las que determinanla posición del centro de masa del cuerpo; sin embargo, no debemos confundir outilizar indiferentemente los términos de centro de masa y de centro de gravedad, ya

594 Lec. 20.- Estática del sólido rígido.
que entre ellos existe una distinción no sólo conceptual sino también
Figura 20.4
práctica. El centro de masa o de inercia es una propiedad intrínsecade la materia, que siempre tiene significado; en cambio, el centrode gravedad solo tiene significado cuando el cuerpo se encuentra enun campo gravitatorio externo. Además, la coincidencia del centrode gravedad y del centro de masa no es general, sino que provienede la suposición que hemos hecho de que el campo gravitatorio seauniforme en el volumen ocupado por el cuerpo.
Esta situación se presenta, en el caso del campo gravitatorio terrestre, sólo si elcuerpo no es demasiado extenso. De otro modo no podemos considerar g = cte entoda la extensión del cuerpo ya que, como sabemos, la dirección de g es radial y sumódulo decrece con el cuadrado de la distancia al centro de la Tierra. Bajo unascondiciones generales el centro de gravedad y el centro de masa de un cuerpo notienen porqué coincidir.
Para comprenderlo, imaginemos una barra homogénea, de muchos kilómetrosde longitud (Figura 20.4), en posición vertical sobre la superficie terrestre. Si consideramos el peso porunidad de longitud de la barra, es obvio que a medida que nos alejamos del extremo inferior de la barradicho peso por unidad de longitud irá disminuyendo (por disminuir la intensidad del campo gravitatorioterrestre). Las posiciones del centro de masa (cm) y del centro de gravedad (G) de la barra están indicadasen la Figura 20.4; se comprenderá fácilmente la no coincidencia de ambos centros.
En la mayor parte de los problemas de la
Figura 20.5
Mecánica nos referiremos a cuerpos cuyas dimen-siones son pequeñas en comparación con las distan-cias que se requieren para que la intensidad delcampo gravitatorio terrestre cambie de un modosignificativo; bajo esas condiciones podemosaceptar la coincidencia del centro de masa y delcentro de gravedad de un cuerpo en un mismopunto. De hecho, utilizamos esa coincidenciacuando determinamos la posición del centro de
masa de un cuerpo irregular o no-homogéneo utilizando el método de suspenderlo pordos puntos distintos (Figura 20.5).
§20.6. Sistemas con ligaduras. Grados de libertad.- Frecuentemente nosencontramos con sistemas materiales cuyo movimiento está restringido por ciertaslimitaciones físicas que reciben el nombre de ligaduras. El concepto de ligadura, asícomo el modo de abordar los problemas en los que estas aparecen, ya fuedesarrollado en una lección anterior (véase, §8.13) y si ahora lo mencionamos denuevo es para relacionarlo con otro concepto importante; el de grados de libertad deun sistema material. También hemos hecho referencia, con anterioridad, a los seisgrados de libertad del sólido rígido libre, pero en ningún momento hemos definidoel concepto de grados de libertad y su relación con las ligaduras.
Entendemos por grados de libertad de un sistema material el númeromínimo de coordenadas independientes que son necesarias para especificarla configuración del sistema material.
Así, para el caso de una partícula no sujeta a ligaduras, necesitamos trescoordenadas [las cartesianas (x,y,z), por ejemplo] para especificar su posición con

§20.6.- Sistemas con ligaduras. Grados de libertad. 595
respecto a un cierto sistema coordenado. Diremos que la partícula no sujeta aligaduras tiene tres grados de libertad.
La configuración de un sistema material, compuesto por N partículas, quedarádeterminada si conocemos en cada instante las coordenadas de las N partículas; estoes, necesitamos 3N coordenadas. Un sistema de N partículas, sin ligaduras, tiene 3Ngrados de libertad.
Pero si existen ligaduras holónomas, las coordenadas de las N partículas queconstituyen el sistema no son independientes entre sí, ya que están relacionadas porecuaciones de la forma
[20.12]f j (x1,y1,z1,x2,y2,z2, xN,yN,zN) 0 con j 1,2, h
de modo que podemos utilizar esas h ecuaciones de ligadura para eliminar h de las3N coordenadas, con lo que sólo nos quedarán 3N - h coordenadas independientesque especificarán la configuración del sistema material sujeto a ligaduras holónomas.Estas coordenadas independientes entre sí pueden elegirse de muy diversas formasy constituyen las llamadas coordenadas libres del sistema material. Entonces,definiremos los grados de libertad de un sistema material como el número mínimode esas coordenadas libres que especifican su configuración en cada instante.
Un ejemplo sencillo de sistema sujeto a ligaduras lo constituye una cuenta de collar ensartada en unalambre. El alambre coincide con cierta curva en el espacio y las ligaduras exigen que las coordenadas dela cuenta satisfagan las dos ecuaciones que definen dicha curva (las ecuaciones de dos superficies cuyaintersección es la curva considerada). Así pues, existen dos ecuaciones de ligadura y la cuenta tiene 3 -2 = 1 grado de libertad; esto es, sólo necesitamos especificar una coordenada (la coordenada intrínseca,por ejemplo) para determinar la posición de la cuenta en el alambre. (¿Qué ocurrirá si se mueve elalambre?)
Para un sólido rígido formado por N partículas se
Figura 20.6
tendrá como máximo 3N grados de libertad, númeroque se reduce considerablemente al tener en cuentalas ligaduras de rigidez, que pueden expresarsemediante ecuaciones de la forma
[20.13]rij cij cte
donde rij es la distancia entre las partículas i-ésima yj-ésima, y cij es constante. Para un cuerpo constituidopor N partículas existen N(N-1)/2 modos distintos decombinarlas por parejas; esto es, existenN(N-1)/2 ecuaciones de ligadura del tipo de [20.13].No obstante, el número efectivo de grados de libertad del sólido rígido no es3N-N(N-1)/2, número que resulta negativo para N > 7. La razón está en que lasN(N-1)/2 ecuaciones de ligadura no son todas independientes entre sí. Para especificarla posición de un punto del sólido rígido no es necesario dar sus distancias a todoslos demás puntos del cuerpo; basta con dar las correspondientes a tres puntos noalineados. Una vez que especificamos las coordenadas de tres puntos no alineadosde un sólido rígido, las coordenadas de los demás puntos quedan determinadas porlas ligaduras. Por tanto, el número de grados de libertad del sólido rígido no excederáde nueve. Pero, además, los tres puntos (1,2,3), que hemos tomado como referencia,están ligados por las condiciones de rigidez

596 Lec. 20.- Estática del sólido rígido.
r12 c12 r23 c23 r31 c31
esto es, por tres ecuaciones de ligadura, con lo que el número de grados de libertadse reduce a seis. Así pues, necesitamos seis coordenadas libres para especificar laposición de un sólido rígido en el espacio, con independencia del número departículas que lo constituyan y de que sea continuo o discreto.
Podemos clasificar los sistemas materiales de acuerdo con el número de gradosde libertad que tengan; así, hablaremos de sistemas materiales con 1, 2, 3, ... gradosde libertad. Tendremos ocasión de ir comprendiendo en lo que sigue que, desde elpunto de vista de la Estática, sólo estamos interesados en el estudio de aquellossistemas materiales que tienen algún grado de libertad positivo. Un sistema con unnúmero de grados de libertad negativo es un sistema sobreabundante en vínculos yse denomina sistema hiperestático; el estudio de tales sistemas queda fuera del campode la Estática, ya que requiere aplicar no solamente las leyes de la Mecánica de loscuerpo rígidos sino también las leyes de la Elasticidad (vide §20.7.c).
§20.7. Estática del sólido rígido sujeto a ligaduras.- Como ya hemos visto,el sólido rígido constituye, ya de por sí, un ejemplo de sistema restringidoholonómicamente, en el que las ecuaciones de ligadura expresan que la distanciaentre dos cualesquiera de sus puntos permanece constante. Pero, además de a esasligaduras intrínsecas, el sólido rígido puede estar sujeto a otras ligaduras queconstriñan su movimiento de conjunto; así, por ejemplo, puede estar obligado a giraralrededor de un eje fijo solidario con el cuerpo.
De acuerdo con el Principio de Liberación de LAGRANGE, podemos sustituir lasligaduras o vínculos por las fuerzas de ligadura que producen el mismo efecto queaquellas. Entonces, cuando busquemos la resultante de todas las fuerzas que obransobre el cuerpo, deberemos tener en cuenta las fuerzas de ligadura o de reacciónvincular. Así, si llamamos Fi (i = 1, 2, ... n) a las fuerzas activas que obran sobre elcuerpo y Fj (j = 1, 2, ... h) a las fuerzas de ligadura, las condiciones de equilibrio[20.3] pueden escribirse en la forma
[20.14]i
F ij
F j 0i
M ij
M j 0
donde Mi y Mj representan los momentos de Fi y Fj, respectivamente, con respectoa un punto cualquiera del espacio. Las ecuaciones [20.14] nos muestran que,
en el equilibrio, las fuerzas activas y las de ligadura constituyen sendossistemas de fuerzas opuestos entre sí.
Normalmente las fuerzas Fi se dan como datos en los problemas de Mecánica;en tanto que las Fj aparecen entre las incógnitas, i.e., se desconocen inicialmente.Imponer ligaduras a un sistema material es una forma de reconocer la presencia deunas fuerzas cuyo valor no podemos determinar directamente, sino que su evaluaciónexige resolver completamente el problema, ya que esas fuerzas sólo las conocemosa través de sus efectos sobre el movimiento del sistema. En ocasiones, no nosinteresará conocer los valores de las fuerzas de ligadura y las eliminaremos de lasecuaciones del equilibrio (o del movimiento) en una etapa inicial; pero, si se desea,

§20.7.- Estática del sólido rígido sujeto a ligaduras. 597
se puede proceder a su determinación. En ciertos casos podremos calcular el valorde las fuerzas de ligadura a partir de las ecuaciones [20.14] que establecen lascondiciones de equilibrio del sólido rígido sujeto a ligaduras.
A continuación estudiaremos con algún detalle ciertos casos interesantes de laEstática del sólido rígido vinculado.
§20.7.a. Sólido rígido con un punto fijo.- Consideremos un cuerpo rígido cuyo
Figura 20.7
movimiento esté restringido de modo que uno de sus puntos, el O, permanezca fijoen un cierto referencial. Se comprende que el cuerpo sólo podrá girar en torno a uneje que pase por dicho punto O; la orientación de ese eje en el espacio podrá sercualquiera. Este sistema tiene tan sólo tres grados de libertad; dos ángulos fijarán laorientación del eje en el espacio y un tercer ángulo determinará la rotación del sólidorespecto a dicho eje. Supongamos que sobre el sólidoactúa un sistema de fuerzas Fi, con i = 1, 2, ... n. Lascondiciones de equilibrio [20.14] se escriben en la forma
[20.15]iF i F 0
iM i M 0
de modo que, llamando R = Fi y M = Mi a laresultante y al momento resultante de las fuerzasactivas y tomando el punto O como centro de reduc-ción, queda
[20.16](a)
⎧⎪⎨⎪⎩
Rx Fx 0Ry Fy 0Rz Fz 0
(b)
⎧⎪⎨⎪⎩
Mx 0My 0Mz 0
esto es, seis ecuaciones escalares, de las que sólo las tres de [20.16b] son indepen-dientes de las reacciones vinculares y representan, por tanto, las condiciones deequilibrio correspondientes a los tres grados de libertad del sistema. Las ecuaciones[20.16b] exigen que la resultante de las fuerzas exteriores que actúan sobre el sólidorígido con un punto fijo pasen por dicho punto.
Conocidas las fuerzas exteriores, las componentes de la reacción vincular en Ose calcularán a partir de las tres ecuaciones de [20.16a].
§20.7.b. Sólido rígido con dos puntos fijos.- Consideremos, ahora, un sólido rígidoque tenga dos puntos fijos en un referencial dado; esto equivale a decir que son fijostodos los puntos de la recta que une esos dos puntos, o sea que el movimiento delsólido está restringido a una rotación en torno a un eje fijo. Este sistema tiene,evidentemente, un solo grado de libertad.
Supongamos que obre sobre el sólido un sistema de fuerzas, Fi con i = 1, 2, ...n, y llamemos F1 y F2 a las reacciones vinculares en los puntos fijos O1 y O2, respec-tivamente. Llamaremos R a la resultante y M al momento resultante de las fuerzasexteriores. Tomando el punto O1 como centro de reducción, las ecuaciones deequilibrio son

598 Lec. 20.- Estática del sólido rígido.
[20.17]i
F i F1 F2 0i
M i M1 M2 0
o sea [20.18](a)
⎧⎪⎪⎨⎪⎪⎩
Rx F1x F2x 0
Ry F1y F2y 0
Rz F1z F2z 0
(b)
⎧⎪⎪⎨⎪⎪⎩
Mx lF2y 0
My lF2x 0
Mz 0
esto es, seis ecuaciones escalares, de las que sólo
Figura 20.8
una, Mz =0, es independiente de las reaccionesvinculares y representa la condición de equilibriocorrespondiente al único grado de libertad delsistema. Así, la condición necesaria para que elsólido esté en equilibrio es que sea nula la compo-nente del momento externo a lo largo del eje fijo(i.e., el momento externo con respecto a dicho eje).
Cuando intentemos calcular las componentes de
Figura 20.9
las reacciones vinculares en O1 y O2 nos encontrare-mos con sólo cinco ecuaciones (las tres de [20.18a] ylas dos primeras de [20.18b]) con seis incógnitas (trescomponentes para cada reacción vincular); el sistema
de ecuaciones es indeterminado. No obstante, la forma de lasecuaciones nos permite calcular F1x, F1y, F2x y F2y tomando sólolas dos primeras ecuaciones de [20.18a] y las dos primeras de[20.18b]. Nos queda entonces la tercera ecuación de [20.18a] quepuede resolverse teniendo en cuenta el sentido de la componenteRz de la resultante R y el tipo de apoyos del eje. Así, en elcaso que se ilustra en la Figura 20.9, si Rz apunta hacia O1,entonces será F1z =0; pero si Rz apunta hacia O2, será F2z =0.
§20.7.c. Sólido apoyado.- Consideremos un cuerpo rígidoapoyado, como es el caso más frecuente, sobre una superficieplana horizontal, que supondremos sin rozamiento. Llamaremospolígono de apoyo del cuerpo al polígono conexo determinadotomando como vértices aquellos puntos de apoyo tales que todoslos puntos de apoyo queden en el interior de dicho polígono.
En las condiciones anteriores, resulta evidente que las fuerzas de reacciónvincular constituyen un sistema de fuerzas paralelas que admite una resultante únicaaplicada en un punto del interior del polígono de apoyo; ese punto es el centro delcitado sistema de fuerzas paralelas.
En el caso de que se trate simplemente de un cuerpo sometido a la acción de supropio peso, P, las condiciones de equilibrio se escriben en la forma
[20.19]Ph
j 1F j 0 M
h
j 1OO j × F j 0

§20.7.- Estática del sólido rígido sujeto a ligaduras. 599
siendo h el número de apoyos, y donde hemos tomado momentos con respecto a unpunto arbitrario O. Las ecuaciones [20.19] nos muestran que la resultante de lasreacciones en los apoyos deben tener (en el equilibrio) el mismo módulo, la mismadirección y recta de acción, pero distinto sentido que el peso de un cuerpo apoyado.Esto equivale a enunciar
Para que un cuerpo apoyado esté en equilibrio es necesario que la proyec-ción vertical de su centro de gravedad caiga en el interior del polígono deapoyo.
Tomando como plano xy el de apoyo y tomando momentos con respecto alorigen O de dicho sistema coordenado, al desarrollar el producto vectorial queaparece en [20.19b], tenemos
Mh
j 1OO j × F j M
h
j 1
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
xj
yj
0
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
F j
0
de modo que las condiciones de equilibrio [20.19] toman la forma
[20.20]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Px 0
Py 0
Pz
h
j 1Fj 0
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Mx
h
j 1yj Fj 0
My
h
j 1xj Fj 0
Mz 0
esto es, seis ecuaciones de las que
Figura 20.10
sólo tres, Px = 0, Py = 0 y Mz = 0,son independientes de las reaccio-nes en los apoyos y que represen-tan las condiciones de equilibriocorrespondientes a los tres gradosde libertad del sistema. Las otrastres ecuaciones permiten calcularel valor de las reacciones en losapoyos siempre que h no seasuperior a tres, lo que haría que elproblema estuviese estáticamenteindeterminado. En efecto, un cuer-po con cuatro o más punto de apoyo constituye un sistema hiperestático, por sersobreabundante en vínculos, y el cálculo de las reacciones vinculares exige no sóloaplicar las leyes de la Estática sino recurrir a la teoría de la Elasticidad.
Como ejemplo, pensemos en una silla de cuatro patas apoyada sobre un suelo plano horizontal.En realidad bastarían tres para la finalidad que tiene la silla; la cuarta pata, en principio, está demás. Puede ocurrir que la silla cojee cuando no soporte más carga que su propio peso; sin embargo,si una persona se sienta sobre ella, quizás la silla deje de cojear. La silla se ha deformado (porefecto de la carga) de modo que las cuatro patas, finalmente, tocan el suelo simultáneamente.Evidentemente, este ejemplo corresponde a un cuerpo que no es rígido, sino deformable (cuerpo

600 Lec. 20.- Estática del sólido rígido.
real), y para calcular las reacciones en los apoyos no podemos servirnos de las leyes de la Estáticadel sólido rígido a menos que las completemos con otras que den cuenta de las deformaciones queexperimentan los cuerpos reales cuando están sometidos a las acciones de las fuerzas.
Podemos considerar, ahora, el caso más general en el que el plano de apoyo nosea horizontal. Entonces, resulta evidente que deberá existir rozamiento para evitarque el cuerpo deslice plano abajo. Las condiciones de equilibrio deberán expresar,como antes, la imposibilidad de vuelco y la de deslizamiento. Dejamos al cuidado delalumno expresar analíticamente esas condiciones.
§20.8. Diagrama del cuerpo libre.- Cuando el sólido rígido está vinculado,utilizamos el Principio de Liberación de LAGRANGE para sustituir las ligaduras ovínculos por las llamadas fuerzas de ligaduras o de reacción vincular que producenlos mismos efectos que las ligaduras o vínculos. Esto es, en el sistema de fuerzasque actúa sobre el sólido deberemos incluir no sólo las fuerzas activas sino tambiénlas fuerzas de ligadura o de reacción vincular. De ese modo podemos obtener undiagrama en el que se incluyen el cuerpo y todas las fuerzas que actúan sobre él,incluidas las de ligadura (una vez suprimidas las propias ligaduras); dibujaremos asíel llamado diagrama para el sólido rígido libre (de ligaduras), que constituye unprimer paso en la resolución de los problemas de la Estática.
Imaginemos una vari-
Figura 20.11
lla rectilínea y homogéneaque se encuentra en equi-librio apoyada en el fondoy en el borde de unaoquedad hemiesféricaperfectamente lisa, comose muestra en la Figu-ra 20.11a. La varilla estásometida a ligaduras quelimitan sus posibilidadesde movimiento. En laFigura 20.11b hemos
dibujado el diagrama de la varilla libre, en el que hemos sustituido las ligaduras (fondo y bordede la oquedad) por las fuerzas de ligadura (N1 y N2) que producen los mismos efectos que aquéllas.
Ejemplo I.- Una varilla lisa y uniforme, de longitud l y masa m, se apoya en el fondo y en el bordede una oquedad hemiesférica perfectamente lisa, de radio R tal que 2R < l < 4R, como se muestraen la Figura 20.11a. a) Determinar la posición de equilibrio. b) Calcular las reacciones en losapoyos.
a) Comenzamos dibujando el diagrama de la varilla libre, sustituyendo las ligaduras por lasfuerzas de ligadura o de reacción en los apoyos (N1 y N2) que producen los mismos efectos queaquéllas, como se muestra en la Figura 20.12, que resulta suficientemente autoexplicativa. La varillaestá sometida a la acción de tres fuerzas que deberán ser concurrentes en el punto D situado sobrela circunferencia de trazos, ya que el ángulo ACD es recto y la dirección de N1 es diametral. Así,el problema de determinar la posición de equilibrio de la varilla se reduce a una cuestión puramentegeométrica.
Observemos que los ángulos GAE y GAD son iguales, ya que son ángulos inscritos en unacircunferencia que subtienden arcos iguales, y que en los triángulos ΔAEG y ΔAED se verifica

§20.8.- Diagrama del cuerpo libre. 601
Figura 20.12
AEG → AE l2
cos θ
AED → AE 2 R cos 2θ
de modo que
l2
cos θ 2 R cos 2θ
o sea cos 2θcos θ
l4 R
< 1
que es la relación que nos permite determinar el valor del ángulo θ correspondiente a la posiciónde equilibrio de la varilla. Así, para l=3R, será θ=23.21°, como el lector comprobará fácilmente.
b) Para calcular las reacciones en los apoyos aplicaremos la primera ec. de la Estática:
iF i
jF j 0
⎧⎪⎨⎪⎩
N1 cos 2θ N2 sen θ 0
N1 sen 2θ N2 cos θ mg
con lo que disponemos de un sistema dos ecuaciones con dos incógnitas cuya solución es:
N1 tg θ mg N2
cos 2θcos θ
mg l4R
mg
Obsérvese que no ha sido necesario aplicar la segunda condición de la Estática (anulación demomentos), ya que hemos hecho uso implícito de ella en el apartado (a).
Ejemplo II.- Péndulo cónico.- Un péndulo cónico está formado por una
Figura 20.13
barra homogénea de longitud l suspendida por su extremo superior deun punto fijo (O) donde está articulada de modo que pueda girar tantoalrededor de un eje horizontal como de otro eje vertical con el queformará un ángulo variable θ. Expresar la velocidad angular ω enfunción del ángulo θ.
Podemos reconducir el problema de dinámica a un problema deestática sin más que resolverlo en un sistema de referencia en el que labarra se encuentre en reposo; i.e., un referencial solidario (Ox′y′z′)como el que se indica en la Figura 20.13. Puesto que tal referencial esno-inercial, por estar en rotación, con velocidad angular ω, sobre labarra "actuará" una fuerza centrífuga que debemos evaluar.
La fuerza centrífuga elemental que actúa sobre un elemento debarra, de longitud dx′ y masa dm=λdx′, siendo λ la densidad lineal, asícomo su momento con respecto al punto O, vienen dados por
dFcf ω2y dm ω2λ x′ senθ dx′ dMcf,O x dFcf ω2λ x′2 senθ cosθ dx′
que representan las distribuciones de fuerza centrífuga y de momento centrífugo a lo largo de labarra. Entonces, la fuerza centrífuga resultante y el momento centrífugo resultante con respecto alpunto O se calculan mediante integración

602 Lec. 20.- Estática del sólido rígido.
Fcf ω2λ senθ ⌡⌠
l
0
x′dx′ 12
ω2λ senθ l 2 12
mω2 l senθ
Mcf,O ω2λ senθ cosθ ⌡⌠
l
0
x′2 dx′ 13
ω2λ l 3 senθ cosθ 13
mω2 l 2 senθ cosθ
En virtud del Teorema de Varignon, podemos escribir
Mcf,O h Fcf ⇒ hMcf,O
Fcf
23
l cosθ
lo que nos permite determinar el punto de aplicación (cf) de la fuerza centrífuga resultante (centrocentrífugo).
Puesto que en el referencial solidario hay equilibrio estático, el momento resultante debe sernulo; i.e.,
mg l2
senθ 13
mω2 l 2 senθ cosθ ⇒ ω 3g2l senθ
§20.9. Estática de un sistema de cuerpos rígidos.- Consideremos unconjunto deformable de cuerpos rígidos (v.g., un montón de piedras). Podemosclasificar las fuerzas que actúan sobre cualquiera de los cuerpos que componen elsistemas en las siguientes categorías:
a) Fuerzas interiores al sistema. Son las fuerzas ejercidas por los demáscuerpos que componen el sistema sobre el cuerpo en cuestión.
b) Fuerzas exteriores al sistema, que pueden clasificarse en:i) Fuerzas activas: el peso, por ejemplo.ii) Fuerzas de reacción en los apoyos.
Para que el sistema de cuerpos rígidos esté en equilibrio deberán estarlo porseparado cada uno de los N cuerpos que lo componen. Esa es la idea contenida enel llamado Principio de Fragmentación que se enuncia así:
Si un sistema de cuerpos rígidos está en equilibrio y lo dividimos en variossubsistemas, cada uno de ellos está en equilibrio por separado.
El Principio de Fragmentación nos permite reducir el problema al estudio delequilibrio de cada uno de los N cuerpos por separado. Esto es, para el cuerpo i-ésimo, de los N que componen el sistema, se deberán satisfacer (en el equilibrio) lasecuaciones cardinales de la Estática; o sea
[20.21]R i 0 M i 0

§20.9.- Estática de un sistema de cuerpos rígidos. 603
donde Ri y Mi representan la resultante y el momento resultante de todas las fuerzasque actúan sobre el cuerpo i-ésimo. De ese modo se obtienen 2N ecuacionesvectoriales que sumadas nos conducen a
[20.22]Ri
R i 0 Mi
M i 0
de modo que la condición necesaria
Figura 20.14
para el equilibrio de un sistema decuerpos rígidos es que sean nulos laresultante y el momento resultante detodas las fuerzas exteriores al sistema(las fuerzas interiores al sistema secontrarrestan automáticamente en virtudde la ley de acción y reacción). Lascondiciones expresadas por [20.22] noson suficientes ya que al no ser rígidoel sistema en su conjunto, las fuerzas aél aplicadas no constituyen un sistemade vectores deslizantes, sino N de tales sistemas (uno para cada cuerpo).
Ejemplo III.- a) Determinar el ángulo θ de la cuña que deberemos utilizar para calzar al cilindroinferior para que el sistema, compuesto por dos cilindros idénticos, homogéneos y lisos, dispuestoscomo se indica en la Figura 20.15, permanezca en equilibrio. b) Determinar el valor mínimo delcoeficiente de rozamiento de la cuña con el suelo.
a) Aplicamos la primera condición de equilibrio al cilindro superior:
Figura 20.15
⎧⎪⎪⎨⎪⎪⎩
N1 N12
22
P N12
22
⇒⎧⎪⎨⎪⎩
N1 P
N12 2 P
y al cilindro inferior:
⎧⎪⎪⎨⎪⎪⎩
N2 senθ N12
22
N2 cosθ N12
22
P
de donde, elevando al cuadrado y sumando miembro amiembro, se sigue que
N 22
N 212
2
N 212
2P 2 2 N12P 5 P 2 ⇒ N2 5 P
y dividiendo miembro a miembro obtenemos

604 Lec. 20.- Estática del sólido rígido.
tg θN12
22
N12
22
P
PP P
12
0.5
de modo que θ arctg 0.5 26.56°
b) Aplicamos la primera condición de equilibrio a la cuña
Figura 20.16
(Figura 20.16), suponiéndola de masa despreciable:
⎧⎪⎨⎪⎩
N2 senθ f μ N3
N2 cosθ N3
[÷] ⇒ tg θ μ 0.5
Este es el motivo por el que el ángulo θ recibe el nombre deángulo de rozamiento (vide §8.10).
§20.10. Concepto de desplazamiento virtual.- La configuración de unsistema material queda determinada, en un instante determinado t, especificando losvectores de posición ri (i = 1, 2, 3, ... N) de cada una de las partículas que locomponen. El estado de equilibrio del sistema se caracteriza porque dichos vectores(3N coordenadas en total) permanecen constantes en el transcurso del tiempo.
Cuando la configuración de un sistema material experimenta algún cambio en eltranscurso del tiempo, esto es, evoluciona pasando de una configuración a otra,decimos que el sistema ha realizado un desplazamiento real. Cada una de laspartículas que componen el sistema, o al menos algunas de ellas, habrán experimen-tado un cierto desplazamiento (en el sentido usual de la palabra). Durante el intervalode tiempo dt, la partícula i-ésima habrá realizado un desplazamiento real dri, dado pordri = vidt.
Evidentemente, si el sistema material se encuentra en equilibrio, no podrá realizarningún desplazamiento real. Sin embargo, podemos imaginar un desplazamientovirtual del sistema, que ocurra instantáneamente y que sea compatible con las fuerzasy las ligaduras a que está sujeto el sistema. Cada una de las partículas del sistemamaterial experimentará un cierto desplazamiento virtual instantáneo, quedesignaremos1 por δri (i = 1, 2, 3, ... N) para distinguirlo de los desplazamientosreales dri que tienen lugar en un cierto intervalo de tiempo dt durante el que puedenhaber variado las fuerzas y las ligaduras.
1 El símbolo diferencial δ tiene las mismas propiedades que el de diferenciaciónordinaria "d"; así, por ejemplo,
δ(x 2) 2 x δx, δ(senθ) cosθ δθ,

§20.10.- Concepto de desplazamiento virtual. 605
Entendemos por desplazamiento virtual de un sistema toda variacióninstantánea de su configuración, como resultado de cualquier cambioinfinitesimal arbitrario en las coordenadas de algunas (o todas) las partículasque lo componen, compatible con las fuerzas y ligaduras impuestas alsistema en el instante t.
Un ejemplo de desplazamiento virtual nos lo ofrece una bolita que
Figura 20.17
pueda correr por un carril circular situado en un plano vertical, comomuestra la Figura 20.17. La bolita puede moverse a lo largo del carrily, también, en dirección perpendicular a él hacia adentro, pero no haciaafuera por impedirlo el carril (ligadura de rigidez). El conjunto detodos lo movimientos infinitesimales imaginables de la bolita (compati-bles con las ligaduras) constituyen el conjunto de los desplazamientosvirtuales de ella.
Clasificaremos los desplazamientos virtuales enreversibles e irreversibles. Son reversibles aquellosdesplazamientos virtuales que pueden realizarse en uncierto sentido (δri) y en su opuesto (-δri). Son irreversibles aquellos desplazamientosvirtuales que se pueden realizar en un cierto sentido pero no en su opuesto, porimpedirlo las ligaduras.
En el ejemplo anterior, son irreversibles los desplazamientos virtuales en dirección normal al carril;en cambio, son reversibles los desplazamientos virtuales tangentes al carril.
Las ligaduras bilaterales sólo permiten desplazamientos reversibles; las ligadurasunilaterales (el ejemplo anterior lo es de una de ellas) permiten desplazamientosvirtuales reversibles e irreversibles.
§20.11. Principio de los trabajos virtuales.- Consideremos un sistemamaterial en equilibrio; como ya sabemos, será condición necesaria y suficiente quese encuentren en equilibrio cada una de las N partículas que lo componen, lo queequivale a decir que deben ser nulas las resultantes de las fuerzas que actúan sobrecada una de las partículas. Esto es
[20.23]R i 0 (i 1,2,3, N)
Resulta obvio que, bajo esas condiciones, se anulará el producto Ri δri, querepresenta el trabajo virtual de la fuerza Ri en el desplazamiento virtual δri; es decir
[20.24]δWi R i δr i 0
La suma de todos esos trabajos virtuales, extendida a todas las partículas, seráasimismo nula
[20.25]δWN
i 1R i δr i 0
Hasta aquí no hemos dicho nada que tenga un contenido físico nuevo; lasresultados [20.24] y [20.25] son deducciones triviales que parten de la definición deequilibrio. Sin embargo, si las fuerzas Ri son funciones continuas de la posición delas partículas, la expresión [20.25] adquiere un nuevo significado físico que puedeenunciarse del modo siguiente:

606 Lec. 20.- Estática del sólido rígido.
El trabajo realizado en un desplazamiento virtual arbitrario de un sistemamaterial, a partir de la posición de equilibrio, vale cero.
El enunciado anterior se conoce como Principio de los Trabajos Virtuales, en suforma más general. Veamos ahora si podemos encontrar un enunciado más restrictivoy que resulte más interesante en cuento a las aplicaciones.
La fuerza resultante Ri que actúa sobre la partícula i-ésima del sistema puedesepararse en dos partes: La resultante Fi de las fuerzas activas y la resultante Fi delas fuerzas de ligadura. O sea
[20.26]R i F i F i
de modo que la ec. [20.25] toma la forma
[20.27]N
i 1F i δr i
N
i 1F i δr i 0
El segundo sumatorio de la esta expresión representa el trabajo virtual de las fuerzasde ligadura en un desplazamiento virtual compatible con las ligaduras.
Si las ligaduras son bilaterales (reversibles) las fuerzas de ligadura seránnormales a los desplazamientos que permitan, esto es Fi ⊥ δri, de modo que eltrabajo virtual correspondiente será nulo y, en consecuencia, será
[20.28]N
i 1F i δr i 0
Pero si las ligaduras son unilaterales, los desplazamientos virtuales podrán serreversibles e irreversibles. En el primer caso se cumplirá [20.28]. En el segundo caso,cuando el desplazamiento sea irreversible, la partícula se libera del vínculo (lasecuaciones de la ligadura desaparecen) y las fuerzas de ligadura realizarán un trabajoesencialmente positivo, ya que el desplazamiento tendrá lugar en la misma direccióny sentido que la fuerza de ligadura; así, en la situación más general, resulta
[20.29]N
i 1F i δr i ≥ 0
Combinando las ecuaciones [20.27] y [20.29] tenemos
[20.30]N
i 1F i δr i ≤ 0
donde intervienen solamente las fuerzas aplicadas (activas), que pueden suponersecontinuas en el espacio. El signo de igualdad (=) corresponde a la situación, que esla más frecuente, de que los desplazamientos virtuales sean reversibles, cosa quepuede presentarse tanto con ligaduras bilaterales como unilaterales. El Principio delos Trabajos Virtuales establece, entonces, que:
El trabajo realizado por las fuerzas activas durante un desplazamiento virtualreversible, compatible con las ligaduras, de un sistema material, a partir dela posición de equilibrio, vale cero.

§20.11.- Principio de los trabajos virtuales. 607
y puede escribirse [20.31]N
i 1F i δr i 0
que puede considerarse como la condición de equilibrio del sistema y que se llamaecuación simbólica de la Estática.
Obsérvese como, a diferencia de lo que ocurre con la ec. [20.25], la ec. [20.31] noexige que sean nulos todos los coeficientes de δri; esto es, en general Fi ≠ 0. Eso esasí porque los desplazamientos δri no son todos independientes entre sí, ya que estánrelacionados por las ecuaciones que expresan las ligaduras. Para que dichoscoeficientes sean todos nulos es necesario que los desplazamientos virtualessimbolizados por δri sean independientes entre sí, esto es, que utilicemos un conjuntode coordenadas libres (independientes entre sí) cuyo número es igual al de gradosde libertad del sistema material.
Trataremos ahora de transformar el principio de los trabajos virtuales, en suexpresión de [20.31], en una expresión que incluya los desplazamientos virtuales delas coordenadas libres, de modo que sus coeficientes puedan igualarse todos a cero.
Consideremos un conjunto de parámetros (q1, q2, ... qs) que constituya un talsistema de coordenadas libres; llamamos s al número de grados de libertad delsistema. La relación entre los ri y las coordenadas libres vendrá expresada por lasecuaciones de transformación de la forma
[20.32]r i r i(q1,q2, ... qs) (i 1,2, ... N)
de modo que [20.33]δr i
s
j 1
∂r i
∂qj
δqj
y la expresión [20.31] se transforma en
[20.34]
N
i 1F i δr i
N
i 1F i
⎛⎜⎜⎝
⎞⎟⎟⎠
s
j 1
∂r i
∂qj
δqj
s
j 1
⎛⎜⎜⎝
⎞⎟⎟⎠
N
i 1F i
∂r i
∂qj
δqj
s
j 1Qj δqj 0
donde los coeficientes
[20.35]Qj
N
i 1F i
∂r i
∂qj
0 (j 1, 2, ... s)
son todos nulos, ya que los desplazamientos virtuales δqi son independientes entresí. Tendremos s ecuaciones como la [20.35], que expresan la anulación de loscoeficientes de los desplazamientos virtuales asociados a las s coordenadas libres delsistema. Esto es, tenemos s condiciones de equilibrio correspondientes a los s gradosde libertad del sistema material.

608 Lec. 20.- Estática del sólido rígido.
Ejemplo IV.- Una bolita de masa m está ensartada en un alambre liso cuya forma es la de unaparábola de ecuación y = 2ax2, y que gira con velocidad angular constante ω alrededor de su ejede simetría, supuesto que sea vertical. Determinar el valor de ω para el cual la bolita estará enequilibrio en cualquier punto.
Tomaremos como referencial aquél en el que el
Figura 20.18
alambre está en reposo; i.e., un referencial en rotaciónalrededor del eje vertical, con velocidad angular ω(constante). Este referencial no es inercial, por lo quedeberemos considerar, además del propio peso de labolita, la fuerza centrífuga; esto es, las fuerzas activasson
P mg j F cf mω2 x i
∴ F mω2x i mg j
con δr δx i δy j
La ecuación simbólica de la estática, en coordena-das cartesianas, es
[A]F δr
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
mω2 x
mg
0
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
δx
δy
δz
mω2 x δx mg δy 0
La bolita posee un solo grado de libertad, de modo que tomando la coordenada x comocoordenada libre será
[B]y 2ax 2 → δy 4ax δx
y la expresión [A] se transforma en
[C]F δr mω2 x δx 4mga x δx mx (ω2 4ga) δx 0
Entonces, anulando el coeficiente de δx en [C], tenemos, aparte de la solución trivial (x=0)
[D]ω2 4ga 0 → ω 2 ag
de modo que para esta velocidad angular el equilibrio será posible para cualquier posición de labolita en el alambre.
Ejemplo V.- Determinaremos la configuración de equilibrio correspondiente al sistema de dosbarras idénticas articuladas, como se muestra en la Figura 20.19, cuando actúa una fuerza horizontalP0 sobre su extremo inferior.
Las fuerzas activas son:
P0 P0 i P1 mg j P2 mg j
con δr i δxi i δyi j

§20.11.- Principio de los trabajos virtuales. 609
La ecuación simbólica de la estática es
[A]3
i 0F i δr i P0δx0 mg δy1 mg δy2 0
El sistema posee dos grados de libertad; en
Figura 20.19
consecuencia, las coordenadas x0, y1 e y2 no sonlibres. Tomaremos los ángulos θ1 y θ2 comocoordenadas libres, de modo que tenemos
⎧⎪⎪⎪⎨⎪⎪⎪⎩
x0 l sen θ1 l sen θ2
y1
l2
cos θ1
y2 l cos θ1
l2
cos θ2
⇒
[B]
⎧⎪⎪⎪⎨⎪⎪⎪⎩
δx0 l cos θ1 δθ1 l cos θ2 δθ2
δy1
l2
sen θ1 δθ1
δy2 l sen θ1 δθ1
l2
sen θ2 δθ2
Sustituyendo las expresiones [B] en [A] obtenemos la ecuación simbólica de la estática encoordenadas libres:
[C]( P0 l cos θ1
32
mgl sen θ1 ) δθ1 ( P0 l cos θ2
12
mgl sen θ2 ) δθ2 0
Entonces, anulando los coeficientes de δθ1 y δθ2 se sigue
[D]
⎧⎪⎪⎨⎪⎪⎩
P0 l cos θ1
32
mgl sen θ1 0
P0 l cos θ2
12
mgl sen θ2 0
⎧⎪⎪⎨⎪⎪⎩
tg θ1
23
P0
mg
tg θ2 2P0
mg3 tg θ1
Efectuando el producto escalar que aparece en la expresión [20.35] tenemos
[20.36]Qj
N
i 1
⎛⎜⎜⎝
⎞⎟⎟⎠
Fi,x
∂xi
∂qj
Fi,y
∂yi
∂qj
Fi,z
∂zi
∂qj
0
Supongamos que las fuerzas activas sean conservativas; i.e., pueden obtenersecomo el gradiente (cambiado de signo) de una función escalar (la energía potencial)de punto, tal que Fi = - ∇Epi, lo que equivale a escribir para las componentes de lasfuerzas
[20.37]Fi,x
∂Ep,i
∂xi
Fi,y
∂Ep,i
∂yi
Fi,z
∂Ep,i
∂zi
para i = 1, 2, 3, ... N. En estas condiciones, las ecuaciones [20.36] se reducen a

610 Lec. 20.- Estática del sólido rígido.
Qj
N
i 1
⎛⎜⎜⎝
⎞⎟⎟⎠
∂Ep,i
∂xi
∂xi
∂qj
∂Ep,i
∂yi
∂yi
∂qj
∂Ep,i
∂zi
∂zi
∂qj
[20.38]3N
i 1
∂Ep,i
∂qj
3∂Ep
∂qj
0
donde Ep representa la energía potencial total del sistema material. Así, podemosescribir
[20.39]∂Ep
∂qj
0 (j 1, 2, ... s )
que es a lo que se reducen las condiciones de equilibrio en el caso de fuerzasconservativas. Estas ecuaciones nos indican que
un sistema material está en equilibrio si su configuración se corresponde aun máximo o a un mínimo de energía potencial con respecto a las coordena-das libres.
En el primer caso, el equilibrio será inestable; en el segundo, será estable.
Ejemplo VI.- Tres varillas idénticas, de longitud l y masa m, están articuladas como se muestra
Figura 20.20
en la Figura 20.20: en A tenemos un apoyo fijo y en B un apoyo deslizante (sin fricción) a lo largode un eje vertical. a) Determinar la posición de equilibrio delsistema. b) Evaluar el cociente D/l para que la varilla inferiorforme un ángulo de 45° con la vertical. Determinar la inclina-ción de las otras dos varillas.
a) Expresaremos la energía potencial (gravitatoria) delsistema, tomando como nivel de referencia de energía potencialcero el origen de coordenadas xy:
Ep mg l2
cos θ1 mg ( l cosθ1
l2
cos θ2 )
mg ( l cosθ1 l cos θ2
l2
cos θ3 )
12
mgl ( 5 cosθ1 3 cosθ2 cosθ3 )
Por otra parte, disponemos de una condición de ligadura
[A]D l sen θ1 l sen θ2 l senθ3
de modo que las tres coordenadas (θ1, θ2 y θ3) no son indepen-dientes. Puesto que el sistema tiene dos grados de libertad,tomaremos como coordenadas libres θ1 y θ2 y expresaremos laenergía potencial en función de ellas:

§20.11.- Principio de los trabajos virtuales. 611
Ep
12
mgl
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
5 cosθ1 3 cosθ2 1 ⎛⎜⎝
⎞⎟⎠
Dl
senθ1 senθ2
2
Aplicamos las condiciones de equilibrio [20.39] a las 2 coordenadas libres:
∂Ep
∂θ1
12
mgl
⎛⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎠
5 senθ1
2 ⎛⎜⎝
⎞⎟⎠
Dl
senθ1 senθ2 cosθ1
2 1 ⎛⎜⎝
⎞⎟⎠
Dl
senθ1 senθ2
2
12
mgl⎛⎜⎜⎝
⎞⎟⎟⎠
5 senθ1
senθ3 cosθ1
cosθ3
0
o sea [B]5 tg θ1 tg θ3
y, análogamente, [C]3 tg θ2 tg θ3
Las tres ecuaciones [A], [B] y [C] nos permiten determinar los valores de los ángulos θ1, θ2 y θ3
correspondientes al equilibrio.
b) Para θ3=45° es tg θ3=1, de modo que
tg θ1
15
→ θ1 11.31°
tg θ2
13
→ θ2 18.43°
y Dl
sen θ1 senθ2 senθ3 sen 11.31° sen 18.43° sen 45° 1.22
Problemas
20.1.- Demostrar que, en el caso de un sólidorígido sometido a un sistema de fuerzas copla-narias, las condiciones de equilibrio equivalena la anulación de los momentos respecto dedos puntos (en el plano de coplanaridad) y a laanulación de la componente de la resultante enuna dirección que no sea perpendicular a la dela recta definida por los dos puntos citados.
20.2.- Demostrar que, en el caso de un sólidorígido sometido a un sistema de fuerzas, lascondiciones de equilibrio equivalen a la anula-ción de los momentos respecto de tres puntosno alineados.
20.3.- Una caja de embalaje que contiene unfrigorífico pesa 300 kg y tiene forma deparalelepípedo rectangular de 2 m de alto por

612 Lec. 20.- Estática del sólido rígido.
80 cm × 80 cm de base. El coeficiente derozamiento entre la caja y el suelo vale 0.30.Deseamos arrastrarla sobre el suelo mediantela aplicación de una fuerza horizontal.a) ¿Cuál debe ser la magnitud de esa fuerza?b) ¿A qué altura sobre el suelo podemos apli-car esa fuerza sin riesgo de vuelco?
20.4.- La caja del Problema 20.3 se encuentraahora sobre la plataforma de un camión. Cuan-do el camión frena bruscamente ¿qué riesgoserá mayor, el de deslizamiento o el de vuelcode la caja?
20.5.- Transportamos
Prob. 20.5
en una carretilla unbloque homogéneo, demasa m, cuyas dimen-siones se especifican enla figura. Sea μ elcoeficiente de roza-miento entre la basedel bloque y la plata-forma de la carretilla.Determinar los valoresmáximos de la acele-ración de la carretilla(acelerando y frenando)para que no haya movimiento relativo entre elbloque y la carretilla.
20.6.- Un bloque
Prob. 20.6
homogéneo, deforma de parale-lepípedo rectangu-lar de 50 cm dealtura y 30 cm ×30 cm de base,descansa sobre untablero, como semuestra en la figura. El coeficiente de roza-miento estático entre el tablero y el bloque es0.50. a) Cuando vamos inclinando lentamenteel tablero, ¿comenzará a deslizar el bloque obien volcará? Determínense los ángulos críti-cos de deslizamiento y de vuelco. b) ¿Cuálsería la respuesta a la pregunta anterior si elcoeficiente de rozamiento estático fuese 0.70.c) ¿Y si fuese 0.60?
20.7.- Una varilla
Prob. 20.7
homogénea demasa m y longitudl apoya sus extre-mos en dos planoslisos que determi-nan un diedrorecto, como semuestra en lafigura. Determinarla posición de equilibrio y las reacciones en
los extremos de la varilla en función delángulo θ.
20 .8 . - Un rodi l lo
Prob. 20.8
homogéneo de 25 cmde radio y 20 kg depeso está apoyado endos planos lisos queforman ángulos de 30°y 45°, respectivamente,con la horizontal.Calcular las reaccionesen los apoyos de cilindro.
20.9.- En el mecanismo que se representa en la
Prob. 20.9
figura se aplica un par mediante dos fuerzasde 100 N, con un brazo de 120 mm, aplicadasen los puntos D y E de la aleta. Todas lascotas indicadas están expresadas en mm. De-terminar la fuerza F necesaria para establecerel equilibrio y las reacciones en los apoyosfijos B y C. (Se desprecia el peso de la aleta).
20.10.- La herramienta de la figura se utiliza
Prob. 20.10
para hacer girar un eje. Para ello, dispone deun perno A que penetra en un orificio del eje,mientras que el saliente B se apoya en lasuperficie lisa del eje. Cuando se aplicamosuna fuerza de 40 kg en el extremo C de laherramienta, calcular las reacciones en lospuntos A y B y el momento de rotación que seaplica al eje.

Problemas 613
20.11.- Un rodillo homogéneo de 25 cm deradio y 40 kg de peso está situado sobre unplano horizontal. Deseamos hacerlo subir unescalón de 5 cm de altura, y para ello tiramosde él con una fuerza cuya línea de acción pasapor el eje del rodillo. Determinar el módulo dela fuerza necesaria para conseguir nuestroobjetivo: a) si la fuerza aplicada es horizontaly b) si la fuerza aplicada forma un ángulo θcon la horizontal. c) ¿Cuál será el valor de θque minimizará la fuerza necesaria y cuántovaldrá ésta?
20.12.- Una placa
Prob. 20.12
rec tangula r yhomogénea, ded i m e n s i o n e s30 cm × 20 cm yque pesa 2 kg,está unida a un ejevertical de modoque en A estáarticulada con eleje y en B sólo se apoya en él. a) Determinarlas reacciones en los apoyos cuando el sistemagira con una velocidad angular de 30 rpm.b) ¿A partir de que velocidad angular no seapoyará la placa en B?
20.13.- Una escalera de
Prob. 20.13
3 m de longitud y10 kg de peso estáapoyada en un suelorugoso y en un rodillode eje horizontal situa-do a una altura de 2 msobre el suelo, como semuestra en la figura. La escalera permanece enequilibrio para cualquier ángulo θ < 60°, peroresbala si θ > 60°. Calcular el coeficiente derozamiento entre el suelo y la escalera y lasreacciones en los apoyos en la situación deequilibrio crítico.
20.14.- a) Deter-
Prob. 20.14
minar la posiciónde equilibrio delsistema represen-tado en la figuraque se adjunta, enel que no existenrozamientos en losapoyos de la va-rilla con la paredvertical (A) y conel borde horizontal (B). b) Determinar lasreacciones en los apoyos.
20.15.- Una escalera uniforme de 10 m delongitud pesa 30 kg y se apoya en un suelohorizontal y en una pared vertical, formando
un ángulo de 70° con la horizontal. Los coefi-cientes de rozamiento estático en los apoyos dela escalera en el suelo y en la pared valen0.2 y 0.6, respectivamente. Un hombre quepesa 60 kg comienza a subir por la escalera:a) ¿Qué longitud podrá subir antes de que laescalera comience a resbalar? b) ¿Cuál deberíaser la inclinación mínima de la escalera paraque el hombre pueda subir hasta el últimotravesaño sin que la escalera resbale?
20.16.- Una
Prob. 20.16
puer t a degaraje pesa60 kg y estámontada co-mo se mues-tra en lafigura. Lasruedas estánenmohecidas de modo que no ruedan sino quedeslizan en la guía, siendo 0.4 el coeficientecinético de rozamiento. La distancia entre lasruedas es de 2 m y cada una de ellas dista50 cm de los bordes verticales de la puerta. Seempuja la puerta mediante una fuerza hori-zontal constante de modo que se mueva uni-formemente. a) Si la línea de acción de dichafuerza dista 1 m de la guía, ¿cuál es la fuerzaejercida por cada una de las ruedas sobre elcarril? b) Encontrar la máxima distancia a laque se puede aplicar la fuerza horizontal F sinque ninguna rueda se separe del carril.
20.17.- Se trata de colocar una serie de ladri-
Prob. 20.17
llos uno sobre otro, como se muestra en lafigura, de modo que obtengamos el máximosaliente. a) Obtener el criterio que debemos se-
Prob. 20.18
guir para conseguir nuestro objetivo. b) De-mostrar que se puede conseguir un saliente tangrande como queramos sinmás que apilar un númerosuficientemente grande deladrillos.
20.18.- Un bastón estáformado por un tramorectilíneo de 100 cm delongitud y un puño semicir-cular de 8 cm de radio. Loapoyamos en el borde deuna mesa de modo que laparte rectilínea cuelgue por

614 Lec. 20.- Estática del sólido rígido.
debajo del tablero de la mesa. Determinar laposición de equilibrio del bastón.
20.19.- Una semiesfera y
Prob. 20.19
un cono, ambos macizos,construidos con el mismomaterial y del mismo radio,están soldados por susbases. Calcular el valor dela altura máxima del conopara que el sistema secomporte como un tentetie-so al apoyarlo sobre unasuperficie horizontal.
20.20.- Un cana-
Prob. 20.20
lón, de masa mcuya forma es lade medio cilindrocircular con unradio exterior quees el doble delradio interior, des-cansa sobre unplano horizontal.Determinar el mó-dulo de la fuerza vertical F que deberá apli-carse al borde del canalón para que se inclineun ángulo θ, como se indica en la figura.
20.21.- Una barra
Prob. 20.21
homogénea, delongitud 3l, estáapoyada, sin fric-ción, en unbloque homogé-neo, de masa m,anchura l y altura2l, como seindica en lafigura. Determi-nar el valormáximo de lamasa de la barra para que el sistema no vuel-que.
20.22.- La barra homogénea que se muestra en
Prob. 20.22
la figura se apoya sin fricción en el interior yen el borde de una hemiesfera hueca. La posi-ción de equilibrio del sistema corresponde a labarra en posición horizontal. a) Determinar las
reacciones en los contactos. b) Encontrar larelación existente entre M, m y θ.
20 .23 . - Un
Prob. 20.23
cilindro estáformado pordos hemici-lindros ho-mogéneos, ded i f e r e n t e smate r ia les ,s i e n d o l adensidad deuno de ellos el doble de la del otro. Coloca-mos el cilindro sobre un plano horizontalrugoso y lo vamos inclinando progresivamente.a) Determinar el valor máximo del ángulo deinclinación del plano para que el cilindro per-manezca en equilibrio, así como la posicióndel cilindro en el plano. b) Determinar el valormínimo del coeficiente de rozamiento queimpide que el cilindro resbale antes de empe-zar a rodar.
20.24.- En el mecanismo que se muestra en la
Prob. 20.24
figura todos los elementos se consideran demasa despreciable. a) Determinar la fuerzamínima F que hay que aplicar para levantar eltablero por el punto A. b) En las condicionesdel apartado anterior, evaluar las reacciones enB y C.
20.25.- En el mecanismo que se muestra en la
Prob. 20.25
figura, la dos barras homogéneas tienen unamasa por unidad de longitud λ. Un tope (C)impide que la corredera se desplace hacia la
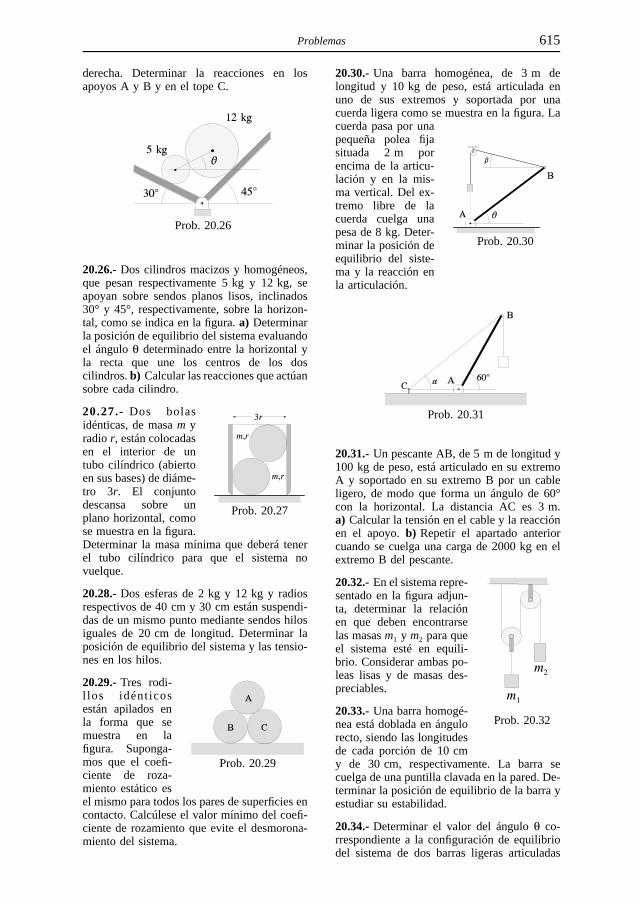
Problemas 615
derecha. Determinar la reacciones en losapoyos A y B y en el tope C.
20.26.- Dos cilindros macizos y homogéneos,
Prob. 20.26
que pesan respectivamente 5 kg y 12 kg, seapoyan sobre sendos planos lisos, inclinados30° y 45°, respectivamente, sobre la horizon-tal, como se indica en la figura. a) Determinarla posición de equilibrio del sistema evaluandoel ángulo θ determinado entre la horizontal yla recta que une los centros de los doscilindros. b) Calcular las reacciones que actúansobre cada cilindro.
20.27.- Dos bolas
Prob. 20.27
idénticas, de masa m yradio r, están colocadasen el interior de untubo cilíndrico (abiertoen sus bases) de diáme-tro 3r. El conjuntodescansa sobre unplano horizontal, comose muestra en la figura.Determinar la masa mínima que deberá tenerel tubo cilíndrico para que el sistema novuelque.
20.28.- Dos esferas de 2 kg y 12 kg y radiosrespectivos de 40 cm y 30 cm están suspendi-das de un mismo punto mediante sendos hilosiguales de 20 cm de longitud. Determinar laposición de equilibrio del sistema y las tensio-nes en los hilos.
20.29.- Tres rodi-
Prob. 20.29
l los idént icosestán apilados enla forma que semuestra en lafigura. Suponga-mos que el coefi-ciente de roza-miento estático esel mismo para todos los pares de superficies encontacto. Calcúlese el valor mínimo del coefi-ciente de rozamiento que evite el desmorona-miento del sistema.
20.30.- Una barra homogénea, de 3 m de
Prob. 20.30
longitud y 10 kg de peso, está articulada enuno de sus extremos y soportada por unacuerda ligera como se muestra en la figura. Lacuerda pasa por unapequeña polea fijasituada 2 m porencima de la articu-lación y en la mis-ma vertical. Del ex-tremo libre de lacuerda cuelga unapesa de 8 kg. Deter-minar la posición deequilibrio del siste-ma y la reacción enla articulación.
20.31.- Un pescante AB, de 5 m de longitud y
Prob. 20.31
100 kg de peso, está articulado en su extremoA y soportado en su extremo B por un cableligero, de modo que forma un ángulo de 60°con la horizontal. La distancia AC es 3 m.a) Calcular la tensión en el cable y la reacciónen el apoyo. b) Repetir el apartado anterior
Prob. 20.32
cuando se cuelga una carga de 2000 kg en elextremo B del pescante.
20.32.- En el sistema repre-sentado en la figura adjun-ta, determinar la relaciónen que deben encontrarselas masas m1 y m2 para queel sistema esté en equili-brio. Considerar ambas po-leas lisas y de masas des-preciables.
20.33.- Una barra homogé-nea está doblada en ángulorecto, siendo las longitudesde cada porción de 10 cmy de 30 cm, respectivamente. La barra secuelga de una puntilla clavada en la pared. De-terminar la posición de equilibrio de la barra yestudiar su estabilidad.
20.34.- Determinar el valor del ángulo θ co-rrespondiente a la configuración de equilibriodel sistema de dos barras ligeras articuladas
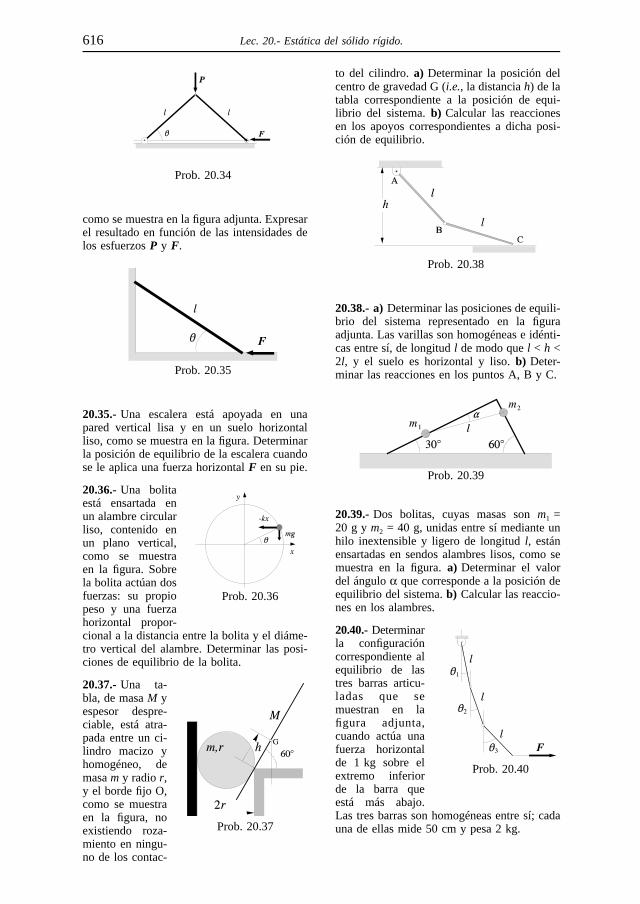
616 Lec. 20.- Estática del sólido rígido.
como se muestra en la figura adjunta. Expresar
Prob. 20.34
el resultado en función de las intensidades delos esfuerzos P y F.
20.35.- Una escalera está apoyada en una
Prob. 20.35
pared vertical lisa y en un suelo horizontalliso, como se muestra en la figura. Determinarla posición de equilibrio de la escalera cuandose le aplica una fuerza horizontal F en su pie.
20.36.- Una bolita
Prob. 20.36
está ensartada enun alambre circularliso, contenido enun plano vertical,como se muestraen la figura. Sobrela bolita actúan dosfuerzas: su propiopeso y una fuerzahorizontal propor-cional a la distancia entre la bolita y el diáme-tro vertical del alambre. Determinar las posi-ciones de equilibrio de la bolita.
20.37.- Una ta-
Prob. 20.37
bla, de masa M yespesor despre-ciable, está atra-pada entre un ci-lindro macizo yhomogéneo, demasa m y radio r,y el borde fijo O,como se muestraen la figura, noexistiendo roza-miento en ningu-no de los contac-
to del cilindro. a) Determinar la posición delcentro de gravedad G (i.e., la distancia h) de latabla correspondiente a la posición de equi-librio del sistema. b) Calcular las reaccionesen los apoyos correspondientes a dicha posi-ción de equilibrio.
20.38.- a) Determinar las posiciones de equili-
Prob. 20.38
brio del sistema representado en la figuraadjunta. Las varillas son homogéneas e idénti-cas entre sí, de longitud l de modo que l < h <2l, y el suelo es horizontal y liso. b) Deter-minar las reacciones en los puntos A, B y C.
20.39.- Dos bolitas, cuyas masas son m1 =
Prob. 20.39
20 g y m2 = 40 g, unidas entre sí mediante unhilo inextensible y ligero de longitud l, estánensartadas en sendos alambres lisos, como semuestra en la figura. a) Determinar el valordel ángulo α que corresponde a la posición deequilibrio del sistema. b) Calcular las reaccio-nes en los alambres.
20.40.- Determinar
Prob. 20.40
la configuracióncorrespondiente alequilibrio de lastres barras articu-ladas que semuestran en lafigura adjunta,cuando actúa unafuerza horizontalde 1 kg sobre elextremo inferiorde la barra queestá más abajo.Las tres barras son homogéneas entre sí; cadauna de ellas mide 50 cm y pesa 2 kg.

Problemas 617
20.41.- Continuemos con el Problema 20.40pero consideremos que en lugar de tener tresbarras articuladas, se tengan N barras articula-das, todas idénticas, de masa total M = Nm.a) Demostrar que el ángulo que forma la barrai-ésima con la vertical, cuando se aplica unafuerza horizontal F en el extremo inferior dela barra que está más abajo, viene dado por
tg θi2N
2(N i ) 1F
Mg
b) Como caso particular, sustitúyase el con-junto de barras articuladas por una cuerdaflexible, de masa M, y calcúlese el ánguloθ0 que forma la cuerda con la vertical en elpunto de suspensión.
20.42.- El sistema
Prob. 20.42
representado en lafigura está consti-tuido por dosvarillas idénticas,de 100 cm delongitud y 4 kg demasa cada una deellas, articuladassin fricción, apo-yadas sobre unsuelo horizontal liso y unidas por sus centrosmediante un muelle constante elástica k =113.16 N/m y 30 cm de longitud natural.Determinar el valor del ángulo θ para que elsistema se encuentre en equilibrio.
20.43.- Una varilla
Prob. 20.43
de masa m ylongitud l estáapoyada en unapared y en unsuelo lisos, comose muestra en lafigura. El movi-miento de lae s c a l e r a e s t á
Prob. 20.44
restringido por unm u e l l e , c u y aconstante elásticaes k = 3mg/l ycuya longitudnatural es l/2,unido a la pared yal extremo inferiorde la escalera.Determinar laposición de equili-brio de la esca-lera.
20.44.- Determinar el valor mínimo de la cons-tante elástica k del muelle representado en lafigura para que el péndulo invertido se encuen-tre en equilibrio estable. Considerar solamentepequeños desplazamientos angulares.
20.45.- El sistema representado en la figura
Prob. 20.45
está formado por dos varillas idénticas articula-das entre sí, en el techo y en la guía verticallisa. a) Encontrar las relaciones que existenentre los ángulos θ1 y θ2 cuando el sistema seencuentra en equilibrio. b) Calcular los valoresde dichos ángulos cuando D = 3l/2.
20.46.- Uno de
Prob. 20.46
los extremos deuna varilla homo-génea, de longi-tud l, está obliga-do a deslizar a lolargo de una guíavertical, en tantoque la varilla seapoya sobre unasuperficie cilín-drica lisa, deradio r, de ejehorizontal, comose muestra en lafigura. Determinar el
Prob. 20.47
valor del ángulo θcorrespondiente al equi-l ibrio. Aplicaciónnumérica: l=4r.
20.47.- Una barra de4 m de longitud y100 kg de peso estáapoyada por uno de susextremos en una paredvertical lisa y sostenidapor el otro extremo me-diante un cable inexten-sible, de 6 m de longi-tud y masa despreciable, como se indica en lafigura. a) Determinar el valor de los ángulos α

618 Lec. 20.- Estática del sólido rígido.
y β que forman el cable y la barra con lapared en la posición de equilibrio. b) Deter-minar la tensión del cable y la reacción en elapoyo.
20.48.- El mecanismo que se muestra en la
Prob. 20.48
figura se encuentra en equilibrio cuando labarra homogénea, de masa m y longitud l, estáen posiciónvertical (i.e., elmuelle no estádeformado). Enel contactoe n t r e l o scilindros noexiste desliza-miento. Deter-minar el ánguloθ correspon-diente a unanueva posiciónde equilibrio ycomprobar que dicho equilibrio es estable.
20.49.- Una varilla AB,
Prob. 20.49
delgada y homogénea,de longitud l y masa m,esta sostenida por unhilo ligero BC y por unpasador que desliza sinfricción a lo largo deun eje vertical, comose indica en la figura.Determinar los ángulosα y θ correspondientea la posición deequilibrio.
20.50.- Una varilla lisa, de masa m y longitud
Prob. 20.50
l se apoya por uno de sus extremos (A) en unplano horizontal liso y por un punto compren-dido entre el A y su centro de gravedad (G) enun borde fijo B, como se muestra en la figura.Determinar la fuerza horizontal que hay queaplicar en A para mantener la varilla en equi-librio con una inclinación θ respecto de lahorizontal y evaluar las reacciones en losapoyos.
20.51.- Un puente colgante está tendido hori-
Prob. 20.51
zontalmente y soportado por seis pares decables verticales, como se muestra en la figuraadjunta, a intervalos de 6 m. El puente pesa120 000 kg; los cables se consideran de masadespreciable. Los cables verticales más cerca-nos al centro del puente miden 2 m. a) Calcu-lar las longitudes que deberán tener los demáscables verticales para que la carga esté igual-mente repartida. b) Calcular las tensiones encada uno de los cables transversales.

21.- Dinámica del sólido rígido.
§21.1. Movimiento de traslación del sólido rígido (620); §21.2. Momento angular del sólidorígido. Coeficientes de inercia (621); §21.3. Tensor de inercia (623); §21.4. Momentosangulares orbital e intrínseco (625); §21.5. Ejes principales de inercia (626);§21.6. Movimiento de rotación del sólido rígido alrededor de un eje fijo (630);§21.7. Péndulo físico. Teorema de Huygens (632); §21.8. Conservación del momentoangular (636); §21.9. Movimiento giroscópico. El trompo (640); §21.10. El giroscopio(643); §21.11. Aplicaciones del movimiento giroscópico (645); Problemas (648)
La dinámica del sólido rígido es un tema complicado y fascinante que posible-mente constituye la cima de la Mecánica Clásica y su parte más difícil. El objetivoprincipal de este capítulo es plantear las ecuaciones exactas, dentro de laslimitaciones de este curso, del movimiento del sólido rígido, de modo que podamosver cuales son los elementos que intervienen.
Para la descripción del movimiento del sólido
Figura 21.1
rígido vamos a utilizar dos referenciales (Figura 21.1).Uno será un referencial fijo o referencial dellaboratorio1, que designaremos por XYZ. El otroserá un referencial móvil ligado al cuerpo, al quedenominaremos referencial solidario y designare-mos por xyz.
El sólido rígido es un sistema con seis gradosde libertad, esto es, necesitamos especificar seiscantidades para determinar la posición y orientacióndel sólido rígido con respecto a un referencial fijo. Esas seis cantidades pueden serlas tres coordenadas de un punto arbitrario del sólido (normalmente elegiremos elcentro de masa), que será asimismo el origen del referencial ligado al cuerpo, y tresángulos independientes (por ejemplo, los ángulos de Euler) que determinen laorientación del sólido respecto al referencial fijo.
1 Llamamos referencial fijo o del laboratorio al referencial en el que describimos elmovimiento del sólido rígido; i.e., en el que se encuentra el observador. Este referencial podrá serinercial o no inercial. En lo que sigue, a fin de evitarnos las complicaciones adicionales que sederivarían de la no-inercialidad del referencial del laboratorio, entenderemos que éste es inercial.
Manuel R. Ortega Girón 619

620 Lec. 21.- Dinámica del sólido rígido.
Cuando existen limitaciones al movimiento del sólido rígido, el número degrados de libertad del mismo se reduce. Así, si el sólido rígido solo puede moversede modo que uno de sus puntos deba permanecer fijo en el referencial dellaboratorio, el número de grados de libertad se reduce a tres; y si son dos los puntosdel sólido que deben permanecer fijos en el referencial del laboratorio (entonces semantiene fija en dicho referencial la recta o eje definida por esos dos puntos) elnúmero de grados de libertad se reduce a uno.
Ya sabemos que el movimiento general del sólido rígido puede ser consideradocomo la superposición de dos movimientos independientes: una traslación de algúnpunto arbitrario del sólido y una rotación del sólido alrededor de un eje que pasa pordicho punto (teorema de Chasles). Si el punto elegido es el centro de masa, entoncesla separación del movimiento en dos partes nos permite aplicar los resultadosobtenidos en las lecciones anteriores, ya que tanto el momento angular como laenergía cinética pueden separarse en dos partes, relacionadas con el movimiento delcentro de masa y con el movimiento del cuerpo respecto a su centro de masa.
Puesto que un sólido rígido tiene, en general, seis grados de libertad, el sistemageneral de ecuaciones del movimiento deberá estar constituido por seis ecuacionesindependientes. Tres de estas ecuaciones estarán relacionadas con los tres grados delibertad de traslación; las otras tres lo estarán con los tres grados de libertad derotación. Estas seis ecuaciones nos las proporcionarán, naturalmente, los teoremas dela cantidad de movimiento y del momento angular, que ya establecimos en la Lec.17 para los sistemas de partículas, de los que el sólido rígido es un caso particular.
§21.1. Movimiento de traslación del sólido rígido.- El teorema de lacantidad de movimiento nos dice que el cambio de la cantidad movimiento del sólidorígido por unidad de tiempo es igual a la resultante de las fuerzas externas que actúansobre él. Esto es,
[21.1]dpdt
F
donde F representa la resultante de todas las fuerzas externas, y p es la cantidad demovimiento del sólido rígido, que puede expresarse como el producto de la masa (m)del sólido rígido por la velocidad (vcm) de su centro de masa2; i.e.,
[21.2]p mvcm
De las dos expresiones anteriores se sigue inmediatamente
2 Puesto que cualquier partícula del sólido rígido (incluido el centro de masa del mismo) seencuentra siempre en reposo en el referencial solidario al mismo (i.e., xyz), la velocidad y la ace-leración de cualquier partícula del sólido serán siempre nulas en dicho referencial. En consecuencia,podemos permitirnos utilizar la notación vi y ai para designar la velocidad y la aceleración de lapartícula i-ésima del sólido en el referencial fijo XYZ, ya que no hay posibilidad de confusión enel uso de las "minúsculas". Sin embargo, designaremos por Ri y ri los vectores de posición de lapartícula i-ésima en los referenciales XYZ y xyz, respectivamente, prestando atención al uso de"mayúsculas" y de "minúsculas" puesto que ahora sí que podría haber confusión.

§21.1.- Movimiento de traslación del sólido rígido. 621
[21.3]F macm
de modo que el centro de masa del sólido rígido se mueve como si en él estuvieraconcentrada toda la masa del cuerpo y sobre él actuase la resultante de todas lasfuerzas externas. No hay, pues, grandes dificultades para estudiar el movimiento detraslación del centro de masa. La ecuación vectorial [21.3] puede descomponerse,evidentemente, en tres ecuaciones escalares, que describen el movimiento detraslación del sólido rígido.
§21.2. Momento angular del sólido rígido. Coeficientes de inercia.- Lastres ecuaciones que necesitamos para describir el movimiento de rotación del sólidorígido se obtienen a partir del teorema del momento angular. Así pues, comenzaremosdeterminando el momento angular del sólido rígido.
Un sólido rígido es un caso particular de los sistemas de partículas, de modo queel momento angular de un sólido rígido con respecto a un punto será la suma de losmomentos angulares individuales de las partículas que constituyen el sólido.
Comenzaremos con un ejemplo sencillo: el de un anillo o aro circular homogéneoy delgado, de masa m y radio r, que gira en torno a un eje fijo, normal a su planoy que pasa por el centro del anillo (Figura 21.2). Entonces toda la masa del anillo seencuentra situada a la misma distancia del eje, de modo que, si tomamos el centrodel anillo como origen de momentos, tenemos
[21.4]Li
r i × mi v ii
mi r i × (ω × r i)
donde hemos tenido en cuenta que todos los puntos del anillo están afectados por lamisma velocidad angular ω. Puesto que
[21.5]r i × (ω × r i) r 2i ω (r i ω ) r i
y como ri ω = 0, tenemos
[21.6]Li
mi r2i ω
imi r
2i ω mr 2 ω
puesto que todos los elementos del anillo son equidistantes del eje. Vemos que el
Figura 21.2
producto mr2 es una propiedad del anillo, quedesignaremos por I
[21.7]I mr 2
y que coincide con la definición, dada en §16.3, delmomento de inercia del anillo respecto al eje derotación anteriormente especificado. Así, podemosescribir
[21.8]L I ω
de modo que el momento angular del anillo respec-to al centro del mismo se puede expresar como el

622 Lec. 21.- Dinámica del sólido rígido.
producto de una propiedad del anillo relacionada con la distribución de su masa entorno al eje de rotación (su momento de inercia I) por la velocidad angular del anilloen su rotación en torno a dicho eje. Obsérvese que, siendo el momento de inercia Iun escalar esencialmente positivo, los vectores L y ω tienen la misma dirección ysentido, al menos en este caso sencillo.
Obtendremos ahora la relación existente entre el
Figura 21.3
momento angular y la velocidad angular para el casogeneral de un cuerpo cuya geometría y distribuciónde masa sean arbitrarias. Tomaremos un referencialxyz ligado al cuerpo; este referencial no debe con-fundirse con el referencial fijo XYZ (Figura 21.3). Seaω la velocidad angular instantánea del cuerpo; lavelocidad vi de la partícula i-ésima será
[21.9]v i v o ω × r i
y, de acuerdo con la definición del momento angular de un sistema de partículas,dada por [17.34], el momento angular del sólido rígido con respecto al punto o delmismo, que se encuentra en movimiento con una velocidad vo, será
[21.10]
Li
mi r i × (v i v o)i
mi r i × (ω × r i)
imi [r 2
i ω (ω r i) r i ]
Como la velocidad angular ω es característica del sólido en su conjunto, afectadel mismo modo a todas las partículas del mismo; en consecuencia, el resultadoanterior se puede escribir en función de las componentes de ω. Cada una de las com-ponentes de ω aparecerá multiplicada por una cierta suma en la que intervienen lasmasas de las partículas y sus coordenadas de posición. Así, la componente x delmomento angular será
[21.11]Lx ω xi
mi r2i
imi (ω r i ) xi
y puesto que [21.12]ω r i ω x xi ω y yi ω z zi
tenemos [21.13]Lx ω xi
mi (r 2i x 2
i ) ω yi
mi xi yi ω zi
mi xi zi
con expresiones análogas para las componentes Ly y Lz. Esto es, teniendo en cuenta
que , podemos escribir:r 2i x 2
i y 2i z 2
i
[21.14]
Lx ω xi
mi (y 2i z 2
i ) ω yi
mi xi yi ω zi
mi xi zi
Ly ω xi
mi yi xi ω yi
mi (x 2i z 2
i ) ω zi
mi yi zi
Lz ω xi
mi zi xi ω yi
mi zi yi ω zi
mi (x 2i y 2
i )
donde vemos que las componentes ωx, ωy, ωz aparecen multiplicadas por unos coefi-cientes que dependen de la distribución de la masa en el cuerpo y de la posición y

§21.2.- Momento angular del sólido rígido. Coeficientes de inercia. 623
orientación del mismo respecto a los ejes xyz. Estos coeficientes reciben el nombrede coeficientes de inercia y coinciden con las definiciones que hemos dado en lasLec. 16 para los momentos de inercia y productos de inercia con respecto a los ejesy planos coordenados, respectivamente. Entonces, utilizando la misma notación yaestablecida en la Lec. 16, tenemos
[21.15]
Ixxi
mi (y 2i z 2
i ) Ixyi
mi xi yi Ixzi
mi xi zi
Iyxi
mi yi xi Iyyi
mi (x 2i z 2
i ) Iyzi
mi yi zi
Izxi
mi zi xi Izyi
mi zi yi Izzi
mi (x 2i y 2
i )
Con esta notación, reescribiremos las ecuaciones [21.14] en una forma más compacta:
[21.16]
Lx Ixx ω x Ixy ω y Ixz ω z
Ly Iyx ω x Iyy ω y Iyz ω z
Lz Izx ω x Izy ω y Izz ω z
Las ecuaciones [21.14] ó [21.16] ponen de manifiesto que para un cuerpo de formaarbitraria el momento angular L no viene expresado simplemente por el producto deun escalar por el vector velocidad angular, como era el caso en el ejemplo del anilloque nos sirvió de introducción a este artículo. Es decir,
en general los vectores momento angular L y velocidad angular ω no tendránla misma dirección.
Esta circunstancia es el origen del movimiento complejo que presentan los cuerposen rotación.
§21.3. Tensor de inercia.- Las ecuaciones [21.16], que relacionan lascomponentes del momento angular con las componentes de la velocidad angular através de los coeficientes de inercia, pueden escribirse en una forma más convenienteutilizando la notación matricial. Así, podemos escribir
[21.17]
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Lx
Ly
Lz
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
ω x
ω y
ω z
definiendo con los nueve coeficientes de inercia una matriz de tres filas y trescolumnas, que representamos por II y que llamaremos matriz de inercia; esto es
[21.18]II
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz

624 Lec. 21.- Dinámica del sólido rígido.
de modo que sus elementos diagonales son los momentos de inercia y los nodiagonales son los productos de inercia. Obsérvese que la matriz de inercia essimétrica, ya que
[21.19]Ixy Iyx Ixz Izx Iyz Izy
por lo que la matriz de inercia sólo tiene seis componentes.La notación matricial nos permite sistematizar las ecuaciones [21.16], de modo que
el momento angular L (que es un vector o matriz columna) queda expresado por elproducto (matricial) de la matriz de inercia II por la velocidad angular ω; i.e.,podemos escribir
[21.20]L II ω
de modo que el momento angular no viene expresado simplemente por el productode un escalar por la velocidad angular, sino que la relación existente entre estos dosvectores es algo más compleja.
Hasta aquí sólo habíamos considerado dos clases de magnitudes físicas: las esca-lares y las vectoriales. Las magnitudes escalares quedan representadas por el ente ma-temático más simple; por un número. Las magnitudes vectoriales quedan represen-tadas por los vectores. La magnitud física II es de una nueva clase; es una magnitudtensorial, y el ente matemático que la representa es el tensor, que es similar a unamatriz de 3 × 3. Llamaremos a II, indistintamente, matriz o tensor de inercia.
La matriz de inercia relaciona una suma de las componentes de la velocidadangular con cada una de las componentes del momento angular. Esto es, cada una delas componentes del momento angular es una combinación lineal de las componentesde la velocidad angular. Por lo tanto, si consideramos un tensor de inercia que notenga nulos los elementos no diagonales o productos de inercia, entonces, aunque lavelocidad angular esté dirigida a lo largo de uno de los ejes, como por ejemplo el ejez, de forma que ω = (0,0,ωz), el momento angular tendrá componentes no nulas sobrelos tres ejes. En efecto, será
[21.21]L
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Lx
Ly
Lz
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
00ω z
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ixz ω z
Iyz ω z
Izz ω z
lo que significa que los vectores L y ω no son paralelos, en general.
Si el sólido tiene simetría de revolución alrededor del eje z (Figura 21.4), entonces será Ixz=Iyz= Ixy= 0, puesto que para cualquier elemento de masa mi situado en (xi,yi,zi) existen otros elemen-tos de la misma masa situados en (-xi,-yi,zi), (-xi,yi,zi) y (xi,-yi,zi), de modo que al efectuar las sumas
Ixz Izxi
mixizi 0 Iyz Izyi
miyizi 0 Ixy Iyxi
mixiyi 0
extendidas a todos los elementos del sólido, el resultado será cero. Entonces será
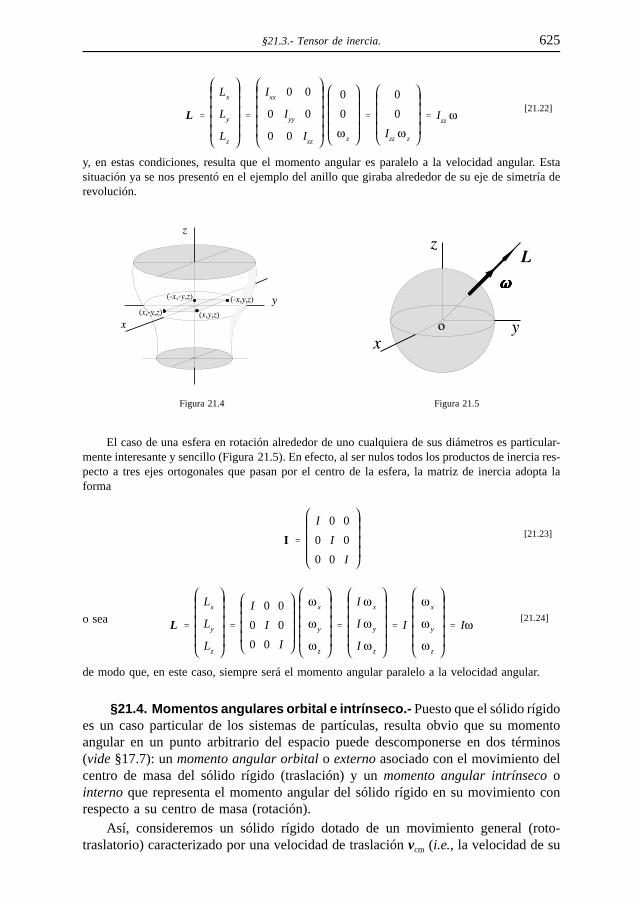
§21.3.- Tensor de inercia. 625
[21.22]L
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Lx
Ly
Lz
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Ixx 0 0
0 Iyy 0
0 0 Izz
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
ω z
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
Izz ω z
Izz ω
y, en estas condiciones, resulta que el momento angular es paralelo a la velocidad angular. Estasituación ya se nos presentó en el ejemplo del anillo que giraba alrededor de su eje de simetría derevolución.
El caso de una esfera en rotación alrededor de uno cualquiera de sus diámetros es particular-
Figura 21.4 Figura 21.5
mente interesante y sencillo (Figura 21.5). En efecto, al ser nulos todos los productos de inercia res-pecto a tres ejes ortogonales que pasan por el centro de la esfera, la matriz de inercia adopta laforma
[21.23]II
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
I 0 0
0 I 0
0 0 I
o sea [21.24]L
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Lx
Ly
Lz
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
I 0 0
0 I 0
0 0 I
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
ω x
ω y
ω z
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I ω x
I ω y
I ω z
I
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
ω x
ω y
ω z
Iω
de modo que, en este caso, siempre será el momento angular paralelo a la velocidad angular.
§21.4. Momentos angulares orbital e intrínseco.- Puesto que el sólido rígidoes un caso particular de los sistemas de partículas, resulta obvio que su momentoangular en un punto arbitrario del espacio puede descomponerse en dos términos(vide §17.7): un momento angular orbital o externo asociado con el movimiento delcentro de masa del sólido rígido (traslación) y un momento angular intrínseco ointerno que representa el momento angular del sólido rígido en su movimiento conrespecto a su centro de masa (rotación).
Así, consideremos un sólido rígido dotado de un movimiento general (roto-traslatorio) caracterizado por una velocidad de traslación vcm (i.e., la velocidad de su

626 Lec. 21.- Dinámica del sólido rígido.
centro de masa) y una velocidad angular
Figura 21.6
de rotación ω. Elegiremos el referencialsolidario con origen en el centro de masadel sólido, como se muestra en la Figu-
ra 21.6.El momento angular orbital o externo
del sólido con respecto al punto O, quetomaremos como origen de un referencialfijo XYZ, será
[21.25]R cm × mv cm R cm × p O
que es el momento angular de una partí-cula que tuviera la masa total del sólido,
estuviese en el centro de masa del mismo y se moviese con la velocidad de éste.El momento angular intrínseco o interno del sólido rígido lo obtendremos a partir
de la definición [21.20]; esto es,
[21.26]L cmi
mi r i × (v i v cm)i
mi r i × (ω × r i) ... II cm ω
donde el subíndice cm aplicado a la matriz de inercia indica que ésta debe evaluarseen el centro de masa del sólido.
Así, en definitiva, el momento angular del sólido en un punto O arbitrario delespacio (i.e., "no perteneciente" al sólido), será
[21.27]L O R cm × mv cm L cm
que representa la formulación del TEOREMA DE KŒNIGS para el momento angular delsólido rígido:
El momento angular de un sólido rígido con respecto a un punto O delespacio puede expresarse como la suma (vectorial) del momento angular desu cantidad de movimiento mvcm, localizada en su centro de masa, respectodel punto O, y de su momento angular respecto a su centro de masa, en unarotación ω alrededor de un eje que pasa por el mismo.
§21.5. Ejes principales de inercia.- Es obvio que obtendremos una mayorsimplicidad en las expresiones [21.16] ó [21.20], que relacionan las componentes delmomento angular con las componentes de la velocidad angular, si en la matriz deinercia son nulos todos los elementos no diagonales o productos de inercia; esto es,si la matriz de inercia es de la forma
[21.28]II
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1 0 0
0 I2 0
0 0 I3
pues entonces será
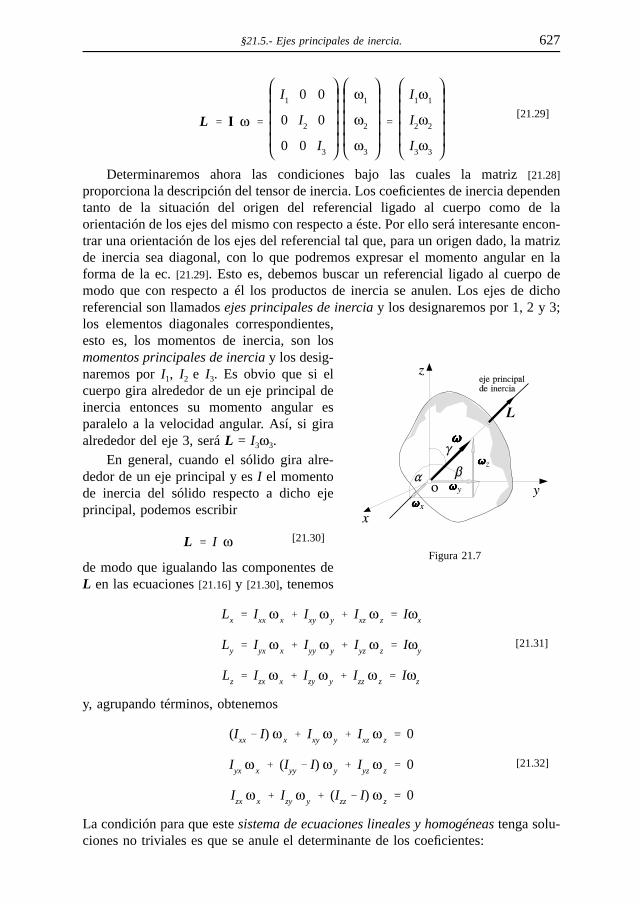
§21.5.- Ejes principales de inercia. 627
[21.29]L II ω
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1 0 0
0 I2 0
0 0 I3
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
ω1
ω2
ω3
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1ω1
I2ω2
I3ω3
Determinaremos ahora las condiciones bajo las cuales la matriz [21.28]
Figura 21.7
proporciona la descripción del tensor de inercia. Los coeficientes de inercia dependentanto de la situación del origen del referencial ligado al cuerpo como de laorientación de los ejes del mismo con respecto a éste. Por ello será interesante encon-trar una orientación de los ejes del referencial tal que, para un origen dado, la matrizde inercia sea diagonal, con lo que podremos expresar el momento angular en laforma de la ec. [21.29]. Esto es, debemos buscar un referencial ligado al cuerpo demodo que con respecto a él los productos de inercia se anulen. Los ejes de dichoreferencial son llamados ejes principales de inercia y los designaremos por 1, 2 y 3;los elementos diagonales correspondientes,esto es, los momentos de inercia, son losmomentos principales de inercia y los desig-naremos por I1, I2 e I3. Es obvio que si elcuerpo gira alrededor de un eje principal deinercia entonces su momento angular esparalelo a la velocidad angular. Así, si giraalrededor del eje 3, será L = I3ω3.
En general, cuando el sólido gira alre-dedor de un eje principal y es I el momentode inercia del sólido respecto a dicho ejeprincipal, podemos escribir
[21.30]L I ω
de modo que igualando las componentes deL en las ecuaciones [21.16] y [21.30], tenemos
[21.31]
Lx Ixx ω x Ixy ω y Ixz ω z Iωx
Ly Iyx ω x Iyy ω y Iyz ω z Iωy
Lz Izx ω x Izy ω y Izz ω z Iωz
y, agrupando términos, obtenemos
[21.32]
(Ixx I) ω x Ixy ω y Ixz ω z 0
Iyx ω x (Iyy I) ω y Iyz ω z 0
Izx ω x Izy ω y (Izz I) ω z 0
La condición para que este sistema de ecuaciones lineales y homogéneas tenga solu-ciones no triviales es que se anule el determinante de los coeficientes:

628 Lec. 21.- Dinámica del sólido rígido.
[21.33]
⎡⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎦
Ixx I Ixy Ixz
Iyx Iyy I Iyz
Izx Izy Izz I
0
El desarrollo de este determinante conduce a la ecuación secular o polinomio ca-racterístico para I, que es un polinomio de tercer grado. Cada una de las tres raícesdel polinomio característico corresponde a un momento de inercia respecto a un ejeprincipal. Estos valores I1, I2 e I3 son los momentos principales de inercia.
Si el cuerpo gira en torno al eje correspondiente al momento principal de inerciaI1, entonces la ecuación [21.29] se transforma en L = I1ω1, y tanto la velocidad angularcomo el momento angular están dirigidos a lo largo de dicho eje. Esto es, laorientación de ω respecto a los ejes xyz ligados al cuerpo será la misma que la deleje principal correspondiente. Por lo tanto, podemos determinar la dirección de esteeje principal sustituyendo I1 en el sistema de ecs. [21.32] y determinando la relaciónωx : ωy : ωz en que se encuentran las componentes de la velocidad angular. De estaforma determinaremos los cosenos directores del eje principal al que corresponde elmomento principal I1. Las direcciones de los ejes principales correspondientes a losmomentos principales I2 e I3 se determinarán de un modo análogo. Se puededemostrar que las tres direcciones así encontradas son ortogonales.
Aunque el proceso de diagonalización de la matriz de inercia nos conduce solamente alconocimiento de la proporcionalidad ωx : ωy : ωz entre las componentes de ω, esto no es uninconveniente, ya que esta proporcionalidad determina completamente la dirección de cada ejeprincipal; es solamente la dirección de dichos ejes lo que nos interesa. Por supuesto que nopodemos determinar los valores de ωx, ωy y ωz, puesto que dichos valores no dependen tan sólo dela forma geométrica del cuerpo, sino del valor de la velocidad angular que le proporcionemos.Naturalmente, somos libres para suministrar al cuerpo cualquier velocidad angular que deseemos.
En la mayor parte de los problemas que encontraremos en la dinámica del sólidorígido el cuerpo presentará un aspecto regular, de modo que los ejes principales deinercia pueden ser determinados examinando la simetría del cuerpo. Por ejemplo, serámuy frecuente que encontremos sólidos que presentan simetría de revolución conrespecto a un cierto eje (caso de un cilindro o de un cono de revolución) estandosituado sobre dicho eje el origen del referencial ligado al cuerpo. Dicho eje seráprecisamente uno de los ejes principales de inercia; todas las direcciones perpendicu-lares al eje de simetría de revolución son equivalentes, lo que es característico de unaraíz doble de la ecuación secular [21.33]. Por tanto, los ejes principales serán el desimetría y dos cualesquiera perpendiculares entre sí y al eje de simetría.
Si los tres momentos principales de inercia de un sólido rígido son iguales, estoes si I1 = I2 = I3, al sólido se le denomina peonza esférica; si es I1 ≠ I2 = I3, lodenominamos peonza simétrica; y si los momentos principales de inercia son distintoslo denominaremos peonza asimétrica. Denominaremos rotor a un sólido rígido parael que es I1 = I2 e I3 = 0, como por ejemplo, dos partículas unidas por una barraligera o una molécula diatómica.

§21.5.- Ejes principales de inercia. 629
Ejemplo I.- Diagonalización de la matriz de inercia.- Determinar los ejes principales de inerciaen uno de los vértices de una lámina cuadrada y homogénea.
Sea a la longitud del lado de la lámina. Los momentos de inercia Ixx e Iyy se determinan a partirde los resultados del Ejemplo X de la Lec. 16, sin más que aplicar el teorema de Steiner:
Figura 21.8
Ixx Iyy112
ma 2 m ⎛⎜⎝⎞⎟⎠
a2
2 13
ma 2
y, aplicando el teorema de los ejes perpendiculares, se sigue
Izz Ixx Iyy23
ma 2
En cuanto a los productos de inercia, son
Ixz Izx 0 Iyz Izy 0
por estar contenida la lámina en el plano z=0. Obtenemos elproducto de inercia Ixy aplicando el teorema de Steiner al resultado del Ejemplo X de la Lec. 16:
Ixy Iyx 0 mxcmycm m a2
a2
14
ma 2
Así pues, el tensor o matriz de inercia en el vértice de la lámina es
II
⎛⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎠
1
3ma 2 1
4ma 2 0
1
4ma 2 1
3ma 2 0
0 0 2
3ma 2
112
ma 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
4 3 0
3 4 0
0 0 8
112
ma 2 JJ
El polinomio característico de la matriz JJ es
⎡⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎦
4 J 3 0
3 4 J 0
0 0 8 J
(4 J )2 (8 J ) 9 (8 J ) 0
cuyas raíces son J1 1 J2 7 J3 8
de modo que los momentos principales de inercia valen
I1
112
ma 2 I2
712
ma 2 I3
812
ma 2
Determinamos las direcciones de los tres ejes principales de inercia sustituyendo los valoresde los momentos principales de inercia respectivos en el sistema de ecuaciones [21.32].
Para el eje 1:
(J 1)
⎧⎪⎨⎪⎩
3ωx 3ωy 03ωx 3ωy 0
7ωz 0o sea
⎧⎪⎨⎪⎩
ωx λ1
ωy λ1
ωz 0ω1 λ1
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
1
1
0
dirección que corresponde a la diagonal de la lámina.

630 Lec. 21.- Dinámica del sólido rígido.
Para el eje 2:
(J 7)
⎧⎪⎨⎪⎩
3ωx 3ωy 03ωx 3ωy 0
ωz 0o sea
⎧⎪⎨⎪⎩
ωx λ2
ωy λ2
ωz 0ω2 λ2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
1
1
0
dirección perpendicular a la anterior y contenida en el plano de la lámina.
Para el eje 3:
(J 8)
⎧⎪⎨⎪⎩
4ωx 3ωy 03ωx 4ωy 0
0ωz 0o sea
⎧⎪⎨⎪⎩
ωx 0ωy 0ωz λ3
ω3 λ3
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
1
dirección perpendicular al plano de la lámina (i.e., coincide con el eje z).
Así pues, los ejes principales de inercia en el vértice de la lámina son los indicados en laFigura 21.8; obsérvese que son perpendiculares entre sí.
§21.6. Movimiento de rotación del sólido rígido alrededor de un eje fijo.-En los artículos anteriores hemos establecido la relación existente entre la velocidadangular y el momento angular del sólido rígido. Hemos visto que ambos vectoresestán relacionados por medio del tensor de inercia y hemos aprendido a encontrar unreferencial ligado al cuerpo (ejes principales de inercia) en el que dicho tensor tomasu forma más sencilla. No hemos contestado aún a la pregunta cuya respuestaconstituye el objetivo principal de esta lección: ¿Cómo gira el sólido rígido? Tansólo hemos introducido los elementos previos necesarios para abordar eficazmentela respuesta a tal pregunta.
En la Lec. 17 hemos establecido la relación existente entre el momento angulartotal de un sistema de partículas y el momento total de las fuerzas que actúan sobrelas partículas del sistema, cuando tanto el momento angular como los momentos delas fuerzas se calculan con respecto a un mismo punto que deberá encontrarse enreposo en un referencial inercial o ser el centro de masa del sistema. Esto es
[21.34]dLdt
M
donde L = Li es el momento angular total y M = Mi es el momento total debidoa las fuerzas exteriores. La ecuación anterior es aplicable al sólido rígido, ya que éstees un caso especial de los sistemas de partículas. Por consiguiente, utilizaremos la ec.[21.34] como punto de partida para estudiar el movimiento de rotación del sólidorígido bajo la acción de fuerzas exteriores. En realidad la ec. [21.34] constituye de porsí la forma más sencilla de escribir la ecuación del movimiento de rotación del sólidorígido.
En lo que sigue, consideraremos únicamente la situación más simple: cuando elsólido rígido está en rotación en torno a un eje fijo3 en un referencial inercial, y
3 No es necesario que el eje permanezca realmente fijo en el referencial inercial; basta con quesu orientación sea constante respecto de dicho referencial, aunque se traslade; nos estamosrefiriendo al movimiento plano del sólido rígido, que ya hemos tratado en la Lec. 5.

§21.6.- Movimiento de rotación del sólido rígido alrededor de un eje fijo. 631
tomaremos un punto cualquiera de dicho eje como origen de momentos (centro dereducción).
En primer lugar, aplicaremos la ec. [21.34] al caso en el que el eje de rotación fijo
Figura 21.9
sea un eje principal de inercia (Figura 21.9). Cuando el sólido gira alrededor de un ejeprincipal, y sólo en ese caso, el momento angular L es paralelo al eje y, por lo tanto,al vector velocidad angular ω; en estas condiciones podemosescribir
[21.35]L I ω
donde I es el momento de inercia con respecto al citado ejeprincipal. El momento externo vendrá dado por
[21.36]M dLdt
ddt
(I ω )
expresión que corresponde al teorema del momento angularpara el caso de que la rotación tenga lugar en torno a un ejeprincipal. Obsérvese que, por ser L un vector de direcciónconstante (en la dirección del eje), el momento M tambiénestá dirigido a lo largo del eje.
Si la distribución de masa del cuerpo permanece constante con respecto al eje derotación, de modo que el momento de inercia I permanece constante, entonces, de[21.36], se sigue
[21.37]M I dωdt
I α
siendo α la aceleración angular del cuerpo, que tiene también la dirección del ejefijo.
La comparación de las ecuaciones [21.36] y [21.37] con las F = d(mv)/dt y F = ma, correspon-diente a la dinámica de la partícula, nos sugiere la existencia de una gran analogía formal entre larotación del sólido rígido en torno a un eje principal y el movimiento de la partícula. En estaanalogía, la masa m de la partícula es reemplazada por el momento de inercia I del sólido, lavelocidad v por la velocidad angular ω, la aceleración a por la aceleración angular α y la fuerzaF por el momento M. Las ecuaciones [21.36] y [21.37] bien pudieran considerarse como laexpresión de la segunda ley de Newton de la rotación del sólido rígido en torno a un eje principalfijo.
Si el cuerpo gira alrededor de un eje fijo que no es principal (Figura 21.10),entonces la relación entre el momento y la velocidad angular se establece a través dela matriz de inercia
[21.38]L II ω
y si es e el versor en la dirección del eje, de modo que ω = ωe, la proyección delmomento angular sobre dicho eje (i.e., el momento angular con respecto al eje) es
[21.39]Le e L (e II e) ω I ω

632 Lec. 21.- Dinámica del sólido rígido.
siendo I el momento de inercia del cuerpo con respecto
Figura 21.10
al eje de rotación. Entonces, proyectando ambosmiembros de [21.34] sobre el eje de rotación
[21.40]Me
dLe
dtddt
(I ω )
expresión que corresponde al teorema del momentoangular cuando la rotación del cuerpo tiene lugaralrededor de un eje fijo cualquiera.
Si la distribución de masa del cuerpo permanececonstante con respecto al eje de rotación, de modo queel momento de inercia I permanece constante, entonces
[21.41]Me I dωdt
Estos resultados difieren de los obtenidos para la rotación en torno a un ejeprincipal en que Me = e M se refiere a la componente del momento externo sobreel eje de rotación, o sea al momento de las fuerzas exteriores con respecto al eje derotación y no al momento de las fuerzas con respecto al punto O de dicho eje. Enadición a la componente Me del momento, dirigida a lo largo del eje de rotación, elmomento externo total debe tener una componente normal al eje, requerida para queel cuerpo mantenga una posición fija con respecto al eje de rotación o para que el ejemantenga una orientación fija en el espacio. Más adelante, trataremos con másprofundidad este interesante problema.
§21.7. Péndulo físico. Teorema de Huygens.- Como ejemplo de loanteriormente expuesto, resolveremos un problema interesante: el péndulo físico.
Un péndulo físico o compuesto es cualquier cuerpo rígido que pueda oscilarlibremente alrededor de un eje horizontal fijo, que no pasa por su centro demasa, en el campo gravitatorio.
El péndulo físico es un sistema con un sólo grado de libertad; el correspondientea la rotación alrededor del eje fijo ZZ′ (Figura 21.11). La posición del péndulo físicoqueda determinada, en cualquier instante, por el ángulo θ que forma el planodeterminado por el eje de rotación (ZZ′) y el centro de gravedad (G) del péndulo conel plano vertical que pasa por el eje de rotación.
Llamaremos h a la distancia del centro de gravedad (G) del péndulo al eje derotación ZZ′. Cuando el péndulo está desviado de su posición de equilibrio (estable)un ángulo θ, actúan sobre él dos fuerzas (mg y N) cuyo momento resultante conrespecto al eje ZZ′ es un vector dirigido a lo largo del eje de rotación ZZ′, en elsentido negativo del mismo; i.e.,
[21.42]Me mgh sen θ
Si es IO el momento de inercia del péndulo respecto al eje de suspensión ZZ′ yllamamos θ a la aceleración angular del mismo, el teorema del momento angular nos

§21.7.- Péndulo físico. Teorema de Huygens. 633
permite escribir la ecuación diferencial del
Figura 21.11
movimiento de rotación del péndulo:
[21.43]mgh sen θ IOθ
que podemos escribir en la forma
[21.44]θ mghIO
sen θ 0
que es una ecuación diferencial de segundoorden, del mismo tipo que la que encontramosen la Lección 13 para el péndulo simple.
En el caso de que la amplitud angular de lasoscilaciones sea pequeña, podemos poner sen θ≈0 y la ecuación [21.44] adopta laforma
[21.45]θ mghIO
θ 0
o sea [21.46]θ ω2F θ 0 con ω2
FmghIO
que, como ya sabemos, corresponde a un movimiento armónico simple. El periodode las oscilaciones es
[21.47]T 2π
IO
mgh
Es siempre posible encontrar un péndulo simple cuyo periodo sea igual al de unpéndulo físico dado; tal péndulo simple recibe el nombre de péndulo simpleequivalente y su longitud λ recibe el nombre de longitud reducida del péndulo físico.Utilizando la expresión del periodo del péndulo simple de longitud λ, podemosescribir
[21.48]T 2π
IO
mgh2π λ
g
y, por lo tanto, tenemos que [21.49]λIO
mh
Así, en lo que concierne al periodo de las oscilaciones de un péndulo físico(cuanto menos), la masa del péndulo puede imaginarse concentrada en un punto (O′)cuya distancia al eje de suspensión es λ. Tal punto recibe el nombre de centro deoscilación. Todos los péndulos físicos que tengan la misma longitud reducida λ(respecto al eje de suspensión) oscilarán con la misma frecuencia; i.e., la frecuenciadel péndulo simple equivalente, de longitud λ.
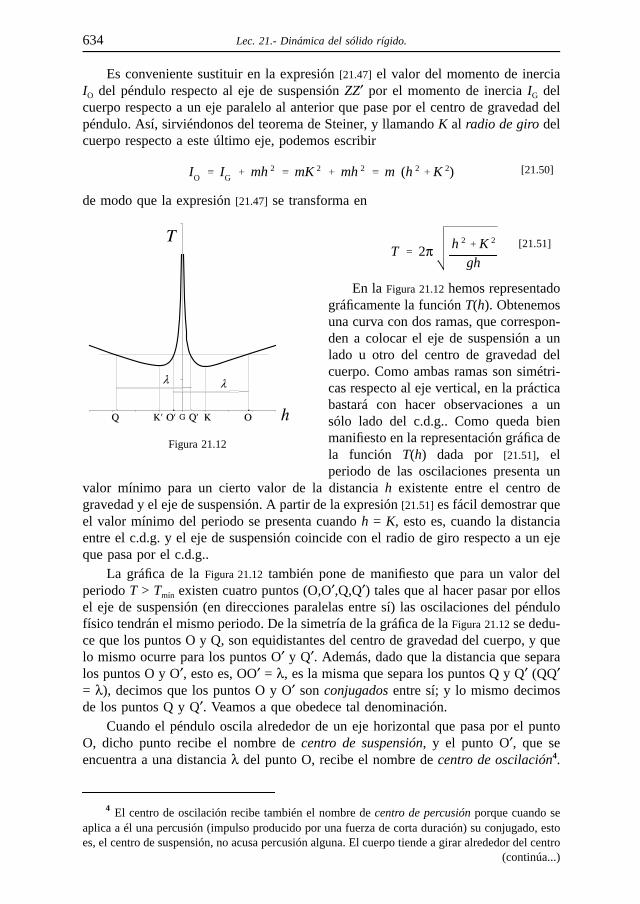
634 Lec. 21.- Dinámica del sólido rígido.
Es conveniente sustituir en la expresión [21.47] el valor del momento de inerciaIO del péndulo respecto al eje de suspensión ZZ′ por el momento de inercia IG delcuerpo respecto a un eje paralelo al anterior que pase por el centro de gravedad delpéndulo. Así, sirviéndonos del teorema de Steiner, y llamando K al radio de giro delcuerpo respecto a este último eje, podemos escribir
[21.50]IO IG mh 2 mK 2 mh 2 m (h 2 K 2)
de modo que la expresión [21.47] se transforma en
Figura 21.12
[21.51]T 2π h 2 K 2
gh
En la Figura 21.12 hemos representadográficamente la función T(h). Obtenemosuna curva con dos ramas, que correspon-den a colocar el eje de suspensión a unlado u otro del centro de gravedad delcuerpo. Como ambas ramas son simétri-cas respecto al eje vertical, en la prácticabastará con hacer observaciones a unsólo lado del c.d.g.. Como queda bienmanifiesto en la representación gráfica dela función T(h) dada por [21.51], elperiodo de las oscilaciones presenta un
valor mínimo para un cierto valor de la distancia h existente entre el centro degravedad y el eje de suspensión. A partir de la expresión [21.51] es fácil demostrar queel valor mínimo del periodo se presenta cuando h = K, esto es, cuando la distanciaentre el c.d.g. y el eje de suspensión coincide con el radio de giro respecto a un ejeque pasa por el c.d.g..
La gráfica de la Figura 21.12 también pone de manifiesto que para un valor delperiodo T > Tmín existen cuatro puntos (O,O′,Q,Q′) tales que al hacer pasar por ellosel eje de suspensión (en direcciones paralelas entre sí) las oscilaciones del péndulofísico tendrán el mismo periodo. De la simetría de la gráfica de la Figura 21.12 se dedu-ce que los puntos O y Q, son equidistantes del centro de gravedad del cuerpo, y quelo mismo ocurre para los puntos O′ y Q′. Además, dado que la distancia que separalos puntos O y O′, esto es, OO′ = λ, es la misma que separa los puntos Q y Q′ (QQ′= λ), decimos que los puntos O y O′ son conjugados entre sí; y lo mismo decimosde los puntos Q y Q′. Veamos a que obedece tal denominación.
Cuando el péndulo oscila alrededor de un eje horizontal que pasa por el puntoO, dicho punto recibe el nombre de centro de suspensión, y el punto O′, que seencuentra a una distancia λ del punto O, recibe el nombre de centro de oscilación4.
4 El centro de oscilación recibe también el nombre de centro de percusión porque cuando seaplica a él una percusión (impulso producido por una fuerza de corta duración) su conjugado, estoes, el centro de suspensión, no acusa percusión alguna. El cuerpo tiende a girar alrededor del centro
(continúa...)

§21.7.- Péndulo físico. Teorema de Huygens. 635
Si ahora hacemos pasar el eje de suspensión por el punto O′, de modo que seaparalelo al anterior eje de suspensión, el punto O′ pasa a ser el punto de suspensión,en tanto que el punto O pasa a ser el centro de oscilación. Ambos puntos hanpermutado entre sí sus papeles; por eso se dice que son conjugados. Lo mismopodemos decir para los puntos Q y Q′. Los resultados anteriores constituyen elllamado TEOREMA DE HUYGENS (1629-1695), que podemos enunciar en la formasiguiente:
La longitud reducida de un péndulo físico no varía cuando el centro deoscilación O′ pasa a ser centro de suspensión (O), pues ambos puntospermutan entre sí sus papeles. El periodo del péndulo será el mismo enambos casos.
Esta propiedad se aprovecha para la construcción del llamado péndulo reversiblede KATER, instrumento que permite medir el valor de la aceleración gravitatoria congran precisión5.
Hemos demostrado el teorema de Huygens a partir de unas consideraciones semicualitativasacerca de la simetría de las dos ramas de la curva que representa a la función T(h). Veamos ahorauna demostración analítica más rigurosa. Consideremos que el eje de suspensión del péndulo pasepor el punto O, situado a una distancia h del c.d.g. del cuerpo. Combinando las expresiones [21.49]y [21.50], la longitud reducida del péndulo, respecto a ese eje de suspensión, puede expresarse enla forma
[21.52]λIO
mh
IG mh 2
mhmK 2 mh 2
mhh 2 K 2
hh K 2
h
Ahora, hagamos pasar el eje de suspensión por otro punto, situado sobre la recta OG y que seencuentre a una distancia h′ del c.d.g., de modo que el periodo de las oscilaciones sea el mismoque antes; esto equivale a decir que la longitud reducida del péndulo, respecto a este nuevo eje desuspensión, es la misma que anteriormente (λ=λ′). Podemos escribir6
[21.53]λ h 2 K 2
hh′2 K 2
h′h 2 h′2
h h′(h h′)(h h′)
(h h′)
y, por lo tanto, [21.54]λ (h h′) (h h′) (h h′)
ecuación que tiene dos soluciones:
a) Puede ser h = h′; i.e., se trata del punto Q, situado al otro lado del c.d.g. y a la mismadistancia de éste que el punto O.
4(...continuación)de suspensión aun cuando no pase por él ningún eje fijo. Analizaremos con más detalle estacuestión en una lección posterior.
5 Prácticas de Laboratorio de Física General, del mismo autor.Práctica nº 10.- Péndulo de Kater.
6 Hacemos uso de la siguiente propiedad de las proporciones ab
cd
a±cb±d

636 Lec. 21.- Dinámica del sólido rígido.
b) En el caso de que sea h ≠ h′, dividiendo por (h - h′) ambos miembros de la igualdad[21.54] y teniendo en cuenta [21.52], nos quedará:
[21.55]λ h h′ ⇒ h′ λ h K 2
h⇒ hh′ K 2
correspondiendo la distancia h′ a la posición del punto O′, conjugado del O, que se encuentrasituado al otro lado del c.d.g. y de modo que la suma de distancias al mismo (h+h′) es la longitudreducida (λ) del péndulo.
§21.8. Conservación del momento angular.- Tras la anterior digresión,proseguiremos nuestro estudio del movimiento de rotación del sólido rígido alrededorde un eje fijo en el referencial del laboratorio.
Supongamos en primer lugar que el eje de rotación es principal. Cuando elmomento de las fuerzas exteriores es nulo, o sea M = 0, entonces de la ec. [21.36] sededuce que el momento angular permanecerá constante; i.e.,
[21.56]L Iω cte
expresión que se refiere al movimiento de rotación en torno a un eje principal enausencia de momento externo. Si el sólido es indeformable, su momento de inerciaserá constante y consecuentemente también lo será la velocidad angular ω. Esto es:
Un sólido rígido que gira libremente (sin la intervención de momentosexternos) alrededor de un eje principal de inercia tendrá una velocidadangular constante.
Este enunciado puede considerarse como la ley de inercia para el movimiento de
Figura 21.13 Figura 21.14
rotación y es más general de lo que a primera vista pudiera parecer. En efecto, puestoque el sólido no tiene tendencia a abandonar su rotación alrededor de un ejeprincipal, no es necesario que este esté apoyado en dos de sus puntos para que sudirección permanezca fija en el espacio en ausencia de momento externo (vide§21.10).
Si el cuerpo no es rígido, sino deformable, es posible que cambie el valor delmomento de inercia al variar la posición de las diversas partes del cuerpo conrespecto al eje de rotación. Entonces, de [21.56] se deduce que, si el momento de

§21.8.- Conservación del momento angular. 637
inercia aumenta, la velocidad angular debe disminuir y viceversa, de modo que elproducto Iω permanezca constante.
Los acróbatas (Figura 21.13), clavidistas (Figura 21.14), bailarines de ballet, patinadores sobrehielo... utilizan frecuentemente este principio. Como el momento de inercia depende del cuadradode la distancia de las partes del cuerpo al eje de rotación, encogiendo o extendiendo los miembroses posible conseguir grandes variaciones en el momento de inercia, de modo que se pueda variarconsiderablemente la velocidad angular en los giros y volteretas. Un gato logra caer sobre sus patasutilizando el mismo principio, sirviéndose de la cola como apéndice útil.
Si el sólido gira alrededor de un eje fijo no principal, entonces de [21.40] con Me=0, se sigue
[21.57]Le Iω cte
La diferencia entre los resultados expresados por [21.56] y [21.57] radica en que enel primer caso debe ser nulo el momento resultante de todas las fuerzas exterioresque obran sobre el cuerpo, en tanto que en el segundo caso sólo exigimos que seanula la componente de dicho momento a lo largo del eje de rotación (i.e., el mo-mento con respecto al eje); pero, incluso si la rotación es uniforme, existirá (comoya hemos indicado anteriormente) una componente del momento normal al eje derotación. Esta componente tiende a modificar la orientación del cuerpo con respectoal eje y de hecho lo conseguirá si el sistema no presenta suficiente rigidez.Analizaremos esta situación con un ejemplo sencillo.
Consideremos una varilla ligera, con masas idénticas en cada uno de sus extre-
Figura 21.15
mos, que forma un ángulo φ con un eje fijo de rotación (apoyado en unos cojinetes,por ejemplo) que pasa por el centro de la varilla. Supongamos que la varilla gira conuna velocidad constante ω en torno a dicho eje, como se muestra en la Figura 21.15.La experiencia demuestra que este sistema estádesequilibrado en el sentido de que, si no tuvierasuficiente rigidez, la varilla se colocaría perpendi-cularmente al eje, o bien el eje abandonaría susapoyos.
En esta situación, puesto que ω = cte (enmódulo y en dirección), estaríamos tentados adecir que no se requiere ningún momento externopara mantener el sistema en rotación uniforme entorno al eje fijo, pero de hecho no es así. Paracomprobarlo calcularemos el momento angulardel sistema con respecto al punto O: i.e.,
[21.58]L mr1 × v1 mr2 × v2
que es, obviamente, un vector perpendicular a lavarilla y contenido en el plano determinado porésta y el eje de rotación (plano sombreado en laFigura 21.15). Obsérvese que aunque el módulo delmomento angular es constante
[21.59]L 2mrv 2mr 2ω sen φ

638 Lec. 21.- Dinámica del sólido rígido.
su dirección no permanece constante en el trans-
Figura 21.16
curso del tiempo, ya que el vector L acompaña ala varilla en su movimiento, de modo que gira (omejor diremos que precesa) con una velocidadangular ω en torno al eje de rotación generandouna superficie cónica de revolución en torno adicho eje (Figura 21.16). Al no ser constante el mo-mento angular (por no serlo su dirección), será
[21.60]M dLdt
≠ 0
de modo que se necesita un momento para mante-ner el sistema en rotación uniforme. Esta situa-ción es análoga a la que encontrábamos al estu-
diar el movimiento circular uniforme de una partícula: aunque la cantidad demovimiento de la partícula permanece constante en módulo se necesita el concursode una fuerza (centrípeta) para cambiar su dirección.
Investigaremos ahora cuál deberá ser la dirección del vector M requerido paramantener nuestro sistema en rotación con velocidad angular constante. Observemosque la componente del momento angular a lo largo del eje de rotación
[21.61]Le L senφ (2mr 2 sen2φ) ω
es constante, de modo que, de acuerdo con [21.40]
[21.62]Me
dLe
dt0
o sea que la componente del momento sobre el eje de rotación debe ser nula. Estoequivale a decir que el vector M debe ser perpendicular al eje de rotación, como yahabíamos indicado anteriormente.
La ec. [21.34], dL = M dt, nos indica que la variación dL del momento angulardurante un intervalo de tiempo infinitesimal dt es un vector en la dirección delmomento M aplicado al cuerpo. Como el vector L tiene módulo constante, será dL⊥L(ya que, de L2 = L L = cte, se sigue 2L dL = 0). Puesto que el vector L mantieneun ángulo constante π/2 - φ con el eje de rotación, su extremo describe una circunfe-rencia de radio L sen(π/2-φ) = L cosφ y dL es tangente a dicha circunferencia. Paradeterminar el módulo de M, observemos que
[21.63]dL (L cos φ) dθ (L cos φ) ω dt
ya que ω = dθ/dt. Igualando la expresión anterior a M dt, e introduciendo el valorde L dado por [21.59], nos queda
[21.64]M (L cos φ) ω (2mr 2 sen φ cos φ) ω2 (mr 2 sen 2φ)ω2
Podemos llegar al mismo resultado, de una forma más inmediata, si tenemos en cuenta queal ser L un vector de módulo constante que gira (precesa) con una velocidad angular ω, su derivadatemporal (i.e., el momento) se puede calcular directamente a partir de la expr. [5.50]; i.e.,

§21.8.- Conservación del momento angular. 639
[21.65]M dLdt
ω × L
de donde se sigue que M ⊥ L y que su módulo es
[21.66]M ω L sen( π2
φ) ω L cosφ
que es la misma expr. [21.64] obtenida antes.
Pero, ¿cuál es la necesidad física de ese momento? Cada una de las esferillasdescribe una trayectoria circular de radio r senφ con una velocidad constante v = ωrsen φ, para lo cual se requiere una fuerza centrípeta F = mω2r senφ. Estas dos fuerzasforman un par cuyo brazo es 2r cosφ, de modo que su momento es precisamente elanteriormente calculado. Así pues, se necesita un momento para mantener a lasesferas fijas con respecto al eje de rotación. Observemos que si φ = 90°, entonces M= 0 y no se necesita momento transversal para mantener el sistema en rotaciónuniforme, ya que entonces la rotación tiene lugar en torno a un eje principal.
La siguiente pregunta es: ¿Cómo se suministra ese momento? El momentoproviene de las fuerzas laterales ejercidas por los apoyos del eje sobre éste ytransmitidas por el eje a la varilla. En el instante que se muestra en la Figura 21.15, elextremo superior de la varilla tiende a desplazarse hacia la derecha. El eje presionasobre el lateral derecho del apoyo superior, el cual, a su vez ejerce una fuerza F(dirigida hacia la izquierda) sobre el eje. Una situación análoga se presenta en elapoyo inferior. Este par de fuerzas produce un "bamboleo" en los apoyos del eje.Tanto los apoyos como sus soportes deben ser suficientemente resistentes parasuministrar dichos esfuerzos. Las reacciones en los apoyos del eje y los esfuerzosinternos pueden dar origen a importantes problemas prácticos cuando cuerpos talescomo rotores de turbinas o ruedas de vehículos giran a grandes velocidades. Para uncuerpo simétrico en rotación alrededor de su eje de simetría (eje principal) no hayreacciones en los apoyos del eje y el cuerpo gira con suavidad. Todos hemos vistotaras de plomo colocadas en las llantas de los automóviles, que tienen por objetoreducir el bamboleo a grandes velocidades debido a la falta de simetría de las ruedas.
Ejemplo II.- Péndulo cónico.- Un péndulo cónico está formado por una barra homogénea delongitud l suspendida por su extremo superior de un punto fijo (O) donde está articulada de modoque pueda girar tanto alrededor de un eje horizontal como de otro eje vertical con el que formaráun ángulo variable θ. Expresar la velocidad angular ω en función del ángulo θ.
Consideremos el referencial solidario xyz, como se indica en la Figura 21.17; la matriz deinercia II en el punto O y la velocidad angular ω vienen dadas por
II O
⎛⎜⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎟⎠
0 0 0
0 13
ml 2 0
0 0 13
ml 2
13
ml 2
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
0 0 00 1 00 0 1
ω
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
ω cosθω senθ
0
de modo que el momento angular (LO) de la varilla con respecto al punto O será:

640 Lec. 21.- Dinámica del sólido rígido.
L O II O ω13
ml 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0 0 0
0 1 0
0 0 1
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
ω cosθω senθ
0
13
ml 2ω
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
senθ0
que derivamos con respecto al tiempo para obtener la expresión del momento dinámico (MO) conrespecto a ese mismo punto; i.e.,
MO
dL O
dtω ×L O
13
ml 2ω2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
cosθsenθ
0
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
senθ0
13
ml 2ω2 senθ cosθ
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
1
Por otra parte, también podemos obtener directamente el valor de
Figura 21.17
dicho momento dinámico:
M O OG×mg
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
l/2
0
0
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
mg cosθmg senθ
0
12
mgl senθ
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
1
e, igualando las dos expresiones, obtenemos
13
ml 2ω2 senθ cosθ 12
mgl senθ ⇒ ω 3g2l cosθ
§21.9. Movimiento giroscópico. El trompo.-Cuando faltan los apoyos que fijan la orientación del eje de rotación en el espacio,el movimiento del sólido rígido se complica considerablemente. En el caso particularde que el eje de rotación sea un eje principal de inercia del cuerpo, el movimientose denomina giroscópico, y el cuerpo en rotación recibe el nombre de giroscopio. Elparadigma de todos los problemas de la dinámica del sólido rígido es el giroscopio7.Estudiaremos este tipo de movimiento, en razón a las numerosas aplicaciones quetiene el movimiento giroscópico.
Comenzaremos nuestro estudio considerando un tipo de movimiento giroscópicoque seguramente todos hemos observado. Nos referimos al movimiento del clásicojuguete llamado trompo o peonza. Si el eje de rotación del trompo, z, forma un ciertoángulo φ con la vertical, como ocurre generalmente, dicho eje se mueve en el espaciogenerando una superficie cónica de revolución en torno al eje vertical fijo Z. Estemovimiento del eje de rotación recibe el nombre de precesión de la peonza y el ejeZ es el eje de precesión. Generalmente, el ángulo φ varía periódicamente durante elmovimiento de precesión de la peonza, de modo que el eje de rotación oscilaacercándose y alejándose del eje de precesión; a este movimiento se le llama
7 Gran parte de la teoría del giroscopio ha sido estudiada en un tratado de cuatro volúmenes,publicado entre los años 1897 a 1910, original de F. KLEIN y A. SOMMERFELD, titulado Theorie desKreissels.

§21.9.- Movimiento giroscópico. El trompo. 641
nutación y al ángulo φ se le llama ángulo de nutación. En el estudio elemental quesigue no tendremos en cuenta este último movimiento; i.e., consideraremos un ángulode nutación constante.
Utilizaremos dos referenciales para describir el movimiento del trompo. Uno deellos es el referencial fijo XYZ, con origen en el punto O (estacionario) del eje derotación del trompo. El otro referencial es el referencial móvil xyz, cuyo origen estambién el punto O (estacionario).
Haremos coincidir el eje z con el eje de rotación del trompo; el eje x lo elegimosde modo que permanezca siempre horizontal, contenido en el plano XY. El ángulo ψque forma en cada instante el eje x con el eje X recibe el nombre de ángulo deprecesión. En consecuencia, el eje y estará siempre contenido en el plano definidopor los ejes z y Z, como se muestra en la Figura 21.18, formando un ángulo φ con elplano XY. Obsérvese que el referencial xyz no es solidario con el trompo, i.e., no esarrastrado por la rotación de éste, sino que presenta una rotación con respecto alreferencial fijo XYZ con una cierta velocidad angular Ω a la que llamaremosvelocidad angular de precesión.
Como al aplicar la ecuación del movimiento de rotación del sólido rígido, M =dL/dt, tanto el momento externo (M) como el momento angular (L) deben estarreferidos a un mismo punto fijo en un referencial inercial ( o al CM del cuerpo),tomaremos el punto O como origen o centro de reducción.
Puesto que el trompo está girando, con una velocidad angular intrínseca ω,alrededor del eje principal z, su momento angular será paralelo a la velocidadangular, o sea, será paralelo al eje z, y viene dado por
Figura 21.18
[21.67]L Izzω
Por otra parte, el momento externo queactúa sobre el trompo se debe al peso mg queactúa en el centro de gravedad G y es igualal producto vectorial
[21.68]M OG × mg
de modo que el momento externo M resultaser perpendicular al eje de rotación, o sea queM⊥L. El módulo del momento aplicado es
[21.69]M mgh sen φ
siendo h = OG la distancia entre el punto estacionario del trompo (el extremo de supúa) y el centro de gravedad del mismo y su dirección es la del eje x.
Como el momento externo aplicado al trompo no es nulo, el momento angularno permanecerá constante. Durante un intervalo de tiempo infinitesimal dt el cambioinfinitesimal experimentado por el momento angular vale
[21.70]dL M dt
de modo que el cambio dL en el momento angular tiene siempre la misma direcciónque el momento aplicado M (del mismo modo que el cambio en la cantidad de movi-

642 Lec. 21.- Dinámica del sólido rígido.
miento tiene siempre la misma direc-
Figura 21.19
ción que la fuerza). Como el momentoM es perpendicular al momento angularL, el cambio dL en el momento angulartambién es perpendicular a L. Porconsiguiente, el vector momento angu-lar cambia de dirección, pero su módu-lo permanece constante (Figura 21.19).Naturalmente, puesto que el momentoangular tiene siempre la dirección deleje de rotación éste cambiará tambiénsu orientación en el espacio en el trans-curso del tiempo. El extremo del mo-mento angular L describe una circunfe-rencia, de radio L senφ, alrededor deleje fijo Z, y en un tiempo dt dicho
radio experimenta un desplazamiento angular dψ. La velocidad angular de precesiónΩ se define como la velocidad angular con la que gira el eje z en torno al eje fijo Z.Esto es
[21.71]Ω dψdt
y está representado por un vector situado sobre eje Z.Puesto que L es un vector de módulo constante que precesa alrededor del eje Z
con una velocidad angular Ω, podemos escribir la ec. dif. del movimiento de rotaciónen la forma
[21.72]M dLdt
Ω × L
obteniéndose para el módulo del momento
[21.73]M Ω L senφ
expresión de la que despejaremos Ω para tener
[21.74]Ω ML senφ
mghL
mghIzzω
donde hemos sustituido las expresiones [21.67] y [21.69] para el momento angular y elmomento, respectivamente. La velocidad angular de precesión, Ω, resulta serinversamente proporcional al momento angular (L) o a la velocidad angular intrínseca(ω), de modo que si éste o ésta es grande, aquélla será pequeña.
Pero, ¿por qué no cae el trompo? La respuesta es que la fuerza vertical ejercidasobre él por el suelo (en el extremo O de la púa) es exactamente igual al peso deltrompo, de modo que la fuerza resultante vertical es nula. La componente vertical dela cantidad de movimiento permanecerá constante pero, debido a que el momento noes nulo, el momento angular cambia con el tiempo. Si el trompo no estuviera en

§21.9.- Movimiento giroscópico. El trompo. 643
rotación, al abandonarlo no habría momento angular y al cabo de un intervalo detiempo infinitesimal, dt, el momento angular dL adquirido, en virtud del par defuerzas que actúa sobre él, tendría la misma dirección que el vector M; esto es, quecaería. Pero si el trompo se encuentra inicialmente en rotación, la variación delmomento angular, dL, producida por el par, se suma vectorialmente al momentoangular que ya tiene, y puesto que dL es horizontal y perpendicular a L, el resultadoes el movimiento de precesión anteriormente descrito.
Los resultados obtenidos en nuestra discusión del movimiento del trompo sonsolamente aproximados. Son correctos si ω es muy grande en comparación con Ω (si-tuación compatible con la ec. [21.74]). La razón es que si el trompo está precesandoen torno al eje fijo vertical Z tendrá un momento angular con respecto a dicho eje,de modo que el momento angular total no será simplemente Izzω, como supusimos.Sin embargo, si la precesión es muy lenta, el momento angular correspondiente a esaprecesión puede despreciarse, como implícitamente hemos hecho en nuestros cálculosanteriores.
Por otra parte, una discusión más
Figura 21.20
detallada nos mostraría que en general elángulo de nutación φ no permanececonstante, sino que oscila entre dosvalores fijos, de modo que el extremo delvector L, al mismo tiempo que precesaalrededor de Z, oscila entre dos círculos,como se muestra en la Figura 21.20, des-cribiendo la trayectoria indicada. Paracomprender el porqué de estas oscila-ciones deberemos considerar el modo enque se origina el movimiento de prece-sión. Si inicialmente mantenemos fija laorientación del eje de rotación z (apo-yando su extremo superior) el peso deltrompo estará compensado por la reacciónnormal N en el punto O más la reacciónnormal en el apoyo del extremo superiordel eje, de modo que resultará ser N <mg. Si una vez que el trompo ha adquirido un rápido movimiento de rotación, abandonamos el eje,entonces, aún un instante después será N < mg, de modo que tenemos una fuerza resultante verticaly dirigida hacia abajo. El trompo comienza a caer, pero en ese instante comienza la precesión.Como consecuencia del movimiento de caída, la púa del trompo se apoya en el suelo con másfuerza, de modo que aumenta la fuerza de reacción vertical N, que finalmente llegará a ser mayorque el peso. Cuando esto sucede, el centro de masa del trompo comienza a acelerar hacia arriba.El proceso se repite, y el movimiento se compone de una precesión acompañada de una oscilacióndel eje de rotación hacia abajo y hacia arriba, que recibe el nombre de nutación. La nutación, aligual que la precesión, contribuye al momento angular total, pero en general su contribución es aúnmenor que la de la precesión.
§21.10. El giroscopio.- Entendemos por giroscopio una peonza simétrica mon-tada sobre anillas en suspensión Cardan de modo que el eje de simetría está exentode ligaduras, mientras que el centro de masa de la peonza permanece estacionario.
En la Figura 21.21 mostramos esquemáticamente un giroscopio tipo, de los dedicados a laenseñanza. El momento de inercia del volante es grande por llevar en su periferia una llanta deplomo. El centro de masa del volante coincide con el punto de intersección de los ejes xyz, de

644 Lec. 21.- Dinámica del sólido rígido.
modo que el peso del volante queda compensado por las fuerzas de reacción en los apoyos,cualquiera que sea la orientación del eje del volante en el espacio. Obsérvese que el referencial xyzno se mueve solidariamente con el giroscopio, sino que se mueve solidariamente con la anilla. Losejes xyz se mantienen siempre perpendiculares entre sí, pero pueden orientarse de cualquier formarespecto a los ejes inerciales (XYZ, no representados en la Figura 21.21), como se comprenderáfácilmente observando las distintas articulaciones de la suspensión. Los rozamientos son muypequeños (debido al empleo de rodamientos a bolas), de modo que imprimiendo un rápido movi-miento de rotación al volante (enhebrando un hilo en el orificio ad hoc del eje, enrollándolo ytirando con fuerza del extremo libre) el movimiento se mantiene durante largo tiempo. El giroscopiode Magnus, representado en la Figura 21.22, se pone en rápida rotación mediante una manivelaacoplable al eje del volante y dispone de numerosos accesorios para ilustrar el funcionamiento ylas diversas aplicaciones del giroscopio.
Cuando el volante está girando alrededor de su eje de simetría, puesto que no
Figura 21.21 Figura 21.22
existe ningún par gravitatorio neto con respecto a su centro de masa, el momentoangular se mantiene constante. Esto es, el eje de rotación (eje x, en la Figura 21.21)mantiene una dirección constante en el espacio. Por tanto, el giroscopio puedeutilizarse como estabilizador de dirección, ya que proporciona una dirección de refe-rencia independiente de la del vehículo que lo transporte. Si desplazamos elgiroscopio en el laboratorio observaremos que el eje de rotación x señala siempre lamisma dirección. El eje de rotación presenta una gran estabilidad, cosa que podemosponer de manifiesto comprobando que su dirección no se modifica sensiblemente algolpear la anilla o la horquilla o al girar el soporte.
Si el momento aplicado al giroscopio no es nulo, el momento angular no semantendrá constante (y tampoco el eje de rotación x). Durante un tiempo infinitesi-mal dt el cambio en el momento angular viene dado por
[21.75]dL M dt
de modo que dL tiene la misma dirección del momento M aplicado. Si el momentoes perpendicular al momento angular, el cambio dL es también perpendicular a L, yel momento angular cambiará de dirección pero no de magnitud (Figura 21.23). Elresultado es la precesión del momento angular alrededor de una dirección fija en elespacio.

§21.10.- El giroscopio. 645
Así, si cuando el volante se en-
Figura 21.23
cuentra en rápida rotación colgamos unpeso P del ganchito de la anilla, aprimera vista parece que el eje derotación debería inclinarse hacia el ladodonde está el peso, sin embargo noocurre así, sino que el giroscopio(horquilla, anilla y volante) empieza agirar lenta y uniformemente en torno aleje fijo vertical Z, manteniéndose el ejerotación x en un plano horizontal.
Para comprender que debe ser así,tengamos en cuenta que el momento aplicado, i.e., el momento del peso P conrespecto al centro de masa del volante, tiene la dirección del eje y, de modo que esM ⊥ L, como se ilustra en la Figura 21.23, por lo que el cambio dL en el momentoangular, durante un tiempo dt, es perpendicular a L. En consecuencia, el momentoangular mantiene constante su módulo y precesa alrededor del eje fijo vertical conuna velocidad angular de precesión Ω. En estas condiciones, la derivada temporal delmomento angular, i.e., el momento aplicado, se puede expresar en la forma
[21.76]M dLdt
Ω × L
y el módulo del momento aplicado es
[21.77]M Ω L
de donde [21.78]Ω ML
MI ω
siendo I es el momento de inercia del volante con respecto a su eje de rotación y ωes la velocidad angular intrínseca del volante. La expresión anterior pone demanifiesto que cuanto mayor sea la velocidad angular de rotación del volante, menorserá la velocidad angular de precesión.
El lector deberá demostrar que si, suprimida la pesa P y estando el volante enrápida rotación, cogemos la horquilla con las manos y la hacemos girar en el sentidode x a y, entonces el eje de rotación se va levantando, girando en torno al eje y, hastaponerse vertical.
Examinando los resultados anteriores, podemos llegar a la siguiente conclusión:
La dirección del momento angular del giroscopio tiende a coincidir con ladel momento externo aplicado; para ello el eje del volante se desvíaperpendicularmente a las fuerzas que aplicamos.
§21.11. Aplicaciones del movimiento giroscópico.- El nombre degiroscopio se debe al físico francés Jean Bernard León FOUCAULT (1819-1868) quefue quién lo inventó (1852) y el primero que lo utilizó para demostrar el movimientode rotación de la Tierra. Consideremos un giroscopio como el descrito anteriormente,

646 Lec. 21.- Dinámica del sólido rígido.
donde el volante se sustituye por un rotor eléctrico a fin de que pueda mantenersepermanentemente en rotación. Colocando el eje de rotación del giroscopio horizon-talmente en la dirección Oeste-Este (posición 1 de la Figura 21.24) observaremos quedicho eje de rotación gira lentamente de modo que al cabo de 6 horas estará en posi-ción vertical (posición 4). Es fácil comprender que esta rotación aparente del eje delvolante se debe en realidad a la rotación de la Tierra, ya que la rotación del eje delvolante debe permanecer fija en el espacio.
Foucault estableció también el principio en que se basa la brújula giroscópica.
Figura 21.24 Figura 21.25
Supongamos que tenemos un giroscopio en el que el eje del volante está obligado amantenerse en un plano horizontal (esto se puede conseguir en el giroscopio de laFigura 21.21 suprimiendo la rotación en torno al eje y). Supongamos que inicialmenteel eje del giroscopio señala la dirección Oeste-Este. Conforme la Tierra gira, el planohorizontal y la dirección Oeste-Este giran de la misma manera. El eje del giroscopiotendería a girar (con respecto a la Tierra) en la dirección contraria a la que indica laflecha 2 (Figura 21.25); la supresión de este movimiento equivale a aplicar un momentoen la dirección Sur-Norte. Por lo tanto, el eje del giroscopio, bajo la acción de esemomento, girará alrededor de la vertical del lugar (como indica la flecha 3) hastaseñalar la dirección Norte. La brújula giroscópica presenta la ventaja sobre la brújulamagnética de señalar la dirección del Norte geográfico, que no coincide con el Nortemagnético, y de no estar sujeta a las anomalías magnéticas locales.
Para mayor simplicidad, hemos hecho los razonamientos anteriores en el supuesto de que elgiroscopio estuviese situado en un punto del Ecuador terrestre. Dejamos al cuidado del lectoranalizar lo que ocurrirá cuando el giroscopio esté situado en un lugar geográfico de latitud λ.
Los fenómenos giroscópicos tienen una amplia gama de aplicaciones. La tenden-cia del eje de rotación del giroscopio a mantener su orientación fija en el espacio seutiliza en la estabilización de los barcos y en los pilotos automáticos de los avionesy de los torpedos. El rayado helicoidal del ánima de los cañones tiene por objetoimprimir a los proyectiles un rápido movimiento de rotación alrededor de su ejelongitudinal, al objeto de evitar que las perturbaciones exteriores puedan modificarla orientación del eje del proyectil desviándolo de la trayectoria deseada. Los efectosgiroscópicos se ponen de manifiesto en todos los cuerpos que giran rápidamente.Desempeñan un papel importante en la conservación de la posición vertical en labicicleta y motocicleta, e intervienen en las ruedas de los automóviles y ferrocarriles,tendiendo a volcar los vehículos en las curvas.
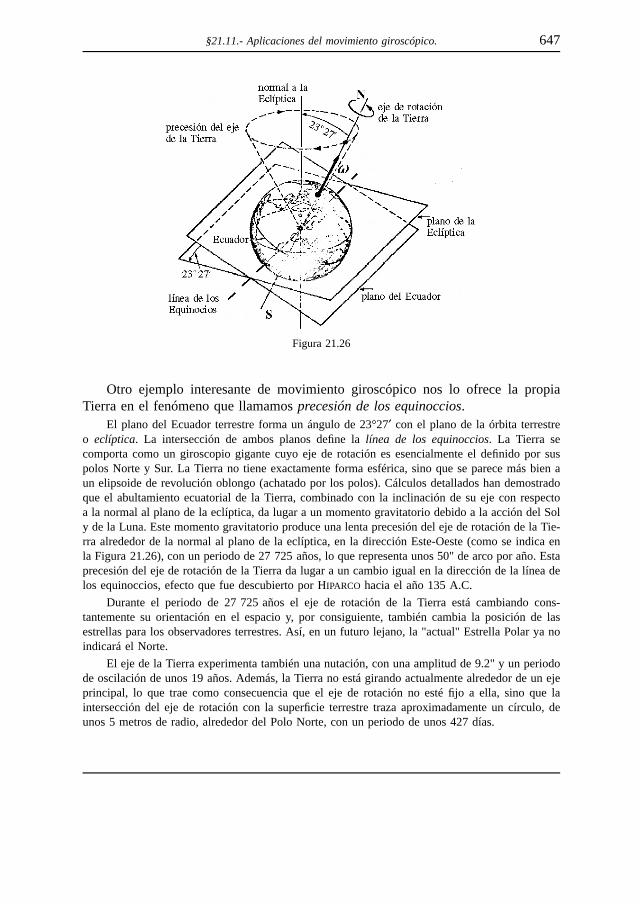
§21.11.- Aplicaciones del movimiento giroscópico. 647
Otro ejemplo interesante de movimiento giroscópico nos lo ofrece la propia
Figura 21.26
Tierra en el fenómeno que llamamos precesión de los equinoccios.El plano del Ecuador terrestre forma un ángulo de 23°27′ con el plano de la órbita terrestre
o eclíptica. La intersección de ambos planos define la línea de los equinoccios. La Tierra secomporta como un giroscopio gigante cuyo eje de rotación es esencialmente el definido por suspolos Norte y Sur. La Tierra no tiene exactamente forma esférica, sino que se parece más bien aun elipsoide de revolución oblongo (achatado por los polos). Cálculos detallados han demostradoque el abultamiento ecuatorial de la Tierra, combinado con la inclinación de su eje con respectoa la normal al plano de la eclíptica, da lugar a un momento gravitatorio debido a la acción del Soly de la Luna. Este momento gravitatorio produce una lenta precesión del eje de rotación de la Tie-rra alrededor de la normal al plano de la eclíptica, en la dirección Este-Oeste (como se indica enla Figura 21.26), con un periodo de 27 725 años, lo que representa unos 50" de arco por año. Estaprecesión del eje de rotación de la Tierra da lugar a un cambio igual en la dirección de la línea delos equinoccios, efecto que fue descubierto por HIPARCO hacia el año 135 A.C.
Durante el periodo de 27 725 años el eje de rotación de la Tierra está cambiando cons-tantemente su orientación en el espacio y, por consiguiente, también cambia la posición de lasestrellas para los observadores terrestres. Así, en un futuro lejano, la "actual" Estrella Polar ya noindicará el Norte.
El eje de la Tierra experimenta también una nutación, con una amplitud de 9.2" y un periodode oscilación de unos 19 años. Además, la Tierra no está girando actualmente alrededor de un ejeprincipal, lo que trae como consecuencia que el eje de rotación no esté fijo a ella, sino que laintersección del eje de rotación con la superficie terrestre traza aproximadamente un círculo, deunos 5 metros de radio, alrededor del Polo Norte, con un periodo de unos 427 días.

648 Lec. 21.- Dinámica del sólido rígido.
Problemas
21.1.- Tres partículas, de masas m, 2m y 5mestán situadas en los puntos (0,0,0), (0,a,2a) y(0,-3a,a), respectivamente. Determinar los mo-mentos y ejes principales de inercia de estesistema en el origen.
21.2.- Determinar el momento angular de unabarra recta y homogénea cuando gira convelocidad angular constante alrededor de uneje que forma un ángulo θ con la barra y quepasa: a) por su centro; b) por uno de susextremos. ¿Son constantes dichos momentosangulares?
21.3.- a) Determinar la matriz de inercia en elcentro de una lámina cuadrada y homogénea.b) Determinar los momentos principales deinercia y las direcciones de los ejes principalesen dicho punto.
21.4.- Determinar los momentos y ejes princi-pales de inercia de una lámina rectangular yhomogénea en uno de sus vértices.
21.5.- a) Determinar la matriz de inercia deuna lámina plana y homogénea en forma detriángulo rectángulo isósceles en el vértice delángulo recto del mismo. b) Determinar losmomentos principales y las direcciones de losejes principales en dicho punto.
21.6.- a) Determinar la matriz de inercia paraun cubo homogéneo, de arista a y masa M,referido a un sistema de ejes formado por tresaristas adyacentes. b) Calcular el momentoangular del cubo cuando gira con velocidadangular constante ω alrededor de una de susaristas. ¿Constituye dicha arista un eje princi-pal? c) Obtener los momentos y ejes principa-les del cubo referidas a uno de sus vértices.
21.7.- Un disco homogéneo, de 15 kg de masay 10 cm de radio, está montado sobre un ejesostenido horizontalmente por apoyos sin roza-miento. Sobre la periferia del disco se enrollauna cuerda ligera y se aplica una fuerza cons-
Prob. 21.7
tante de 5 kg y dirigida hacia abajo en elextremo libre de la cuerda. a) Determinar laaceleración angular del disco. b) En lugar deaplicar la fuerza anterior, colgamos un pesa de5 kg en el extremo libre de la cuerda. Determi-nar, entonces, la aceleración angular del discoy la aceleración de caída de la pesa, así comola tensión de la cuerda. c) Comparar los resul-
tados obtenidos para la aceleración angular enlos apartados anteriores y explicar por qué sondistintos.
21.8.- En la máquina de At-
Prob. 21.8
wood representada en la figura,determinar la aceleración de losbloques A y B, la aceleraciónangular de la polea y la tensiónen cada tramo de la cuerda, enlos casos siguientes: a) Si lasuperficie de la polea es lisa yb) si no hay deslizamientoentre la cuerda y la superficiede la polea. Sea 10 kg y 4 kglas masas respectivas de losbloques A y B, y considérese la polea comoun disco homogéneo de 10 cm de radio y 2 kgde masa.
21.9.- Dos poleas de radios
Prob. 21.9
8 cm y 5 cm respectivamente,están acopladas la una a la otraformando un bloque que puedegirar en torno al eje centralhorizontal. De la garganta de lapolea grande pende un peso de20 kg y de la garganta de lapolea pequeña pende otro pesode 30 kg que tiende a hacergirar las poleas en sentido con-trario al anterior. El momentode inercia de las dos poleas en conjunto es0.006 kg m2. Al dejar el sistema en libertadse pone en movimiento. a) ¿En qué sentido semueve el sistema? b) Calcular la aceleraciónangular de las poleas y la aceleración de cadapesa. c) Calcular la tensión en cada cuerda.
21.10.- Determinar el sentido del movimientodel sistema representado en la figura, la acele-

Problemas 649
ración del sistema y la tensión en cada tramo
Prob. 21.10
de la cuerda que une los bloques m1 = 8 kg ym2 = 10 kg, considerando la polea como undisco de 1 kg de masa y 10 cm de radio. Elcoeficiente de rozamiento en el plano inclinado(30°) es μ = 0.2.
21.11.- Un disco de masa M y radio R puedegirar sin rozamientos apreciables alrededor deun eje vertical que pasa por su centro. Inicial-mente, el disco se encuentra en reposo y cercade su borde está parado un insecto de masa m.En un instante dado, el insecto comienza acaminar a lo largo del borde del disco, con unavelocidad constante respecto al mismo.Calcular la velocidad angular del disco y elángulo que habrá girado cuando el insectoregrese, siguiendo el borde, a su posicióninicial sobre el disco.
21.12.- a) Calcular la frecuencia de las peque-ñas oscilaciones de un aro de radio R colgadode la pared mediante un clavo horizontal.¿Cuál es la longitud reducida de este péndulofísico? b) Repetir el apartado anterior si sesuprime la mitad inferior del aro.
21.13.- a) Un disco homogéneo, de radio R,puede oscilar en torno a un eje horizontal fijoque pasa por un punto de su periferia y esnormal a su plano. Calcular el periodo deoscilación para pequeñas oscilaciones. b) Ídemsi el eje de rotación está contenido en el planodel disco (o sea, es tangente a su circunferen-cia).
21.14.- a) Calcular el periodo de las oscilacio-nes de pequeña amplitud de una lámina enforma de triángulo equilátero cuando el eje desuspensión es perpendicular al plano de lalámina y pasa por uno de los vértices deltriángulo. b) Ídem, en las mismas condiciones,para una lámina en forma rectangular.
21.15.- Una esfera maciza y homogénea, deradio R, está suspendido mediante un hiloextensible y ligero de un punto fijo, de modoque la distancia del centro de la esfera alpunto de suspensión es L. a) Encontrar elperiodo de las pequeñas oscilaciones de estepéndulo "simple". b) Comparar dicho periodocon el del péndulo simple de la misma longi-
tud. c) Estimar el valor de la razón R/L paraque la discrepancia entre los resultados de (a)y (b) sea inferior al 0.001 %.
21.16.- Una varilla homogénea, de longitud Loscila con respecto a un eje horizontal fijo quepasa por uno de sus extremos. Sobre la varillapuede deslizarse una masa cilíndrica, depequeñas dimensiones, que tiene la mismamasa que la varilla. a) Obtener el periodo delas pequeñas oscilaciones de este sistema enfunción de la distancia x a que se encuentre lamasa cilíndrica del eje de suspensión. b) ¿Hayalgún valor de x para el cual el periodo sea elmismo como si no hubiera masa? c) ¿Cuál esel valor mínimo del periodo? ¿A qué valor dex corresponde dicho valor mínimo del periodo?
21.17.- Los extre-
Prob. 21.17
mos de una varillahomogénea estánligados a una cir-cunferencia verticaly pueden deslizarsin rozamiento a lolargo de la misma.Si la varilla subtien-de un ángulo cen-tral de 120°, de-mostrar que la longitud del péndulo simpleequivalente es igual al radio de la circunferen-cia.
21.18.- Consideremos una puerta rectangular u-niforme. a) Determinar el valor de la acelera-ción angular de esa puerta en el instante enque un golpe de viento la empuja perpendicu-larmente a su superficie, ejerciendo sobre ellauna presión (p) uniforme. b) Determinar lavelocidad de la puerta cuando, bajo la accióndel viento (constante) ha girado un ángulo de90°. c) Evaluar el tiempo empleado en dichogiro.
21.19.- Un automóvil arranca llevando una desus puertas abiertas y perpendicular a suflanco. Como las bisagras de la puerta seencuentran en su parte delantera, cuando elauto acelera la puerta se cierra. Consideremosconstante la aceleración del auto, que el centrode masa de la puerta esté situado a una dis-tancia b del eje definido por las bisagras y quesea K el radio de giro de la puerta con respec-to a dicho eje. a) Calcular la velocidad angularde la puerta en el instante en que se cierra.b) Calcular el tiempo que emplea la puerta encerrarse.
21.20.- Una varilla homogénea, de masa m ylongitud L, se encuentra inicialmente en repososobre un plano horizontal xy. Cada elemento
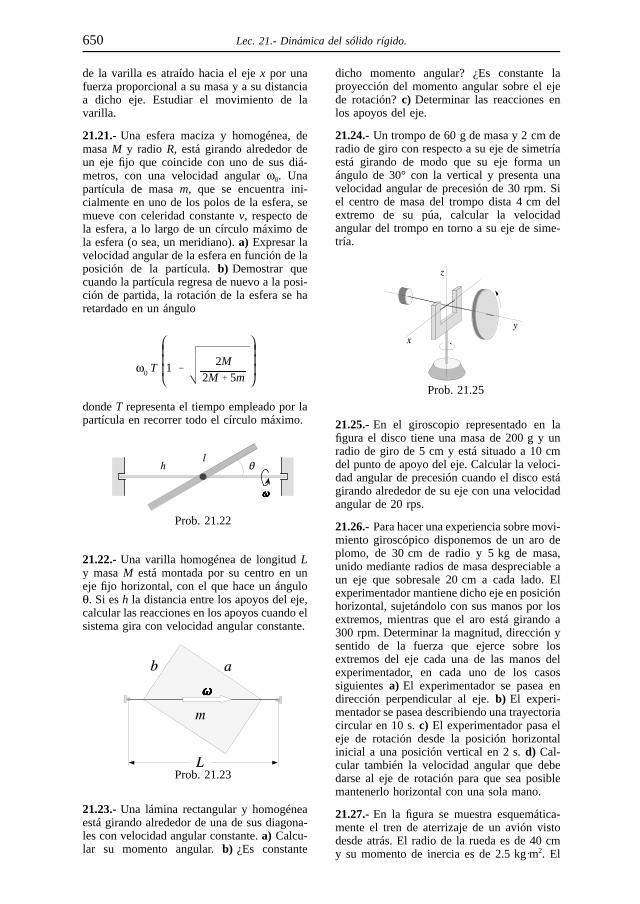
650 Lec. 21.- Dinámica del sólido rígido.
de la varilla es atraído hacia el eje x por unafuerza proporcional a su masa y a su distanciaa dicho eje. Estudiar el movimiento de lavarilla.
21.21.- Una esfera maciza y homogénea, demasa M y radio R, está girando alrededor deun eje fijo que coincide con uno de sus diá-metros, con una velocidad angular ω0. Unapartícula de masa m, que se encuentra ini-cialmente en uno de los polos de la esfera, semueve con celeridad constante v, respecto dela esfera, a lo largo de un círculo máximo dela esfera (o sea, un meridiano). a) Expresar lavelocidad angular de la esfera en función de laposición de la partícula. b) Demostrar quecuando la partícula regresa de nuevo a la posi-ción de partida, la rotación de la esfera se haretardado en un ángulo
ω0 T
⎛⎜⎜⎜⎝
⎞⎟⎟⎟⎠
1 2M2M 5m
donde T representa el tiempo empleado por lapartícula en recorrer todo el círculo máximo.
21.22.- Una varilla homogénea de longitud L
Prob. 21.22
y masa M está montada por su centro en uneje fijo horizontal, con el que hace un ánguloθ. Si es h la distancia entre los apoyos del eje,calcular las reacciones en los apoyos cuando elsistema gira con velocidad angular constante.
21.23.- Una lámina rectangular y homogénea
Prob. 21.23
está girando alrededor de una de sus diagona-les con velocidad angular constante. a) Calcu-lar su momento angular. b) ¿Es constante
dicho momento angular? ¿Es constante laproyección del momento angular sobre el ejede rotación? c) Determinar las reacciones enlos apoyos del eje.
21.24.- Un trompo de 60 g de masa y 2 cm deradio de giro con respecto a su eje de simetríaestá girando de modo que su eje forma unángulo de 30° con la vertical y presenta unavelocidad angular de precesión de 30 rpm. Siel centro de masa del trompo dista 4 cm delextremo de su púa, calcular la velocidadangular del trompo en torno a su eje de sime-tría.
21.25.- En el giroscopio representado en la
Prob. 21.25
figura el disco tiene una masa de 200 g y unradio de giro de 5 cm y está situado a 10 cmdel punto de apoyo del eje. Calcular la veloci-dad angular de precesión cuando el disco estágirando alrededor de su eje con una velocidadangular de 20 rps.
21.26.- Para hacer una experiencia sobre movi-miento giroscópico disponemos de un aro deplomo, de 30 cm de radio y 5 kg de masa,unido mediante radios de masa despreciable aun eje que sobresale 20 cm a cada lado. Elexperimentador mantiene dicho eje en posiciónhorizontal, sujetándolo con sus manos por losextremos, mientras que el aro está girando a300 rpm. Determinar la magnitud, dirección ysentido de la fuerza que ejerce sobre losextremos del eje cada una de las manos delexperimentador, en cada uno de los casossiguientes a) El experimentador se pasea endirección perpendicular al eje. b) El experi-mentador se pasea describiendo una trayectoriacircular en 10 s. c) El experimentador pasa eleje de rotación desde la posición horizontalinicial a una posición vertical en 2 s. d) Cal-cular también la velocidad angular que debedarse al eje de rotación para que sea posiblemantenerlo horizontal con una sola mano.
21.27.- En la figura se muestra esquemática-mente el tren de aterrizaje de un avión vistodesde atrás. El radio de la rueda es de 40 cmy su momento de inercia es de 2.5 kg m2. El

Problemas 651
avión despega a
C
M
Y
CM
MY
CY
CMY
K
Acr523.pdf 04/11/2006 05:16:54
Prob. 21.27
una velocidadde 180 km/h.Después deldespegue, serecoge el tren deaterrizaje girán-dolo lateral-mente a razónde 45° pors e g u n d o .Determinar lamagnitud delpar ejercidosobre la ruedapor su soporte.
21.28.- Describir la dinámica de la rotación dela rueda delantera de una motocicleta cuandotoma una curva a gran velocidad.
21.29.- Considérese la Tierra como una esferahomogénea de 6.38 × 106 m de radio y5.98 × 1024 kg de masa y calcúlese la magni-tud del momento que debe actuar sobre ellapara producir la precesión de los equinocciosrealmente observada.
21.30.- Una peonza simétrica consiste en uncono recto de sección circular de 10 cm dealtura y 4 cm de radio en su base. La peonzaestá girando alrededor de su eje de simetría, arazón de 1200 rpm, manteniéndose fijo suvértice en un plano horizontal. Encontrar elperiodo de la precesión de la peonza alrededorde la vertical.
21.31.- Un cochecito de juguete pesa 500 g entotal, y cada una de sus cuatro ruedas (maci-zas) pesa 20 g. Abandonamos el cochecitosobre un plano inclinado del 10% de pendien-te. Calcular la aceleración del cochecito.
21.32.- Un cilindro macizo baja rodando sinresbalar por un plano inclinado. a) Calcular laaceleración del centro de masa del cilindro.b) Determinar el valor mínimo de la fuerza derozamiento (estático) entre el plano y el cilin-dro a fin de que éste ruede sin resbalar.c) Calcular el valor mínimo del coeficiente derozamiento para que el cilindro no resbale.d) Estudiar el movimiento del cilindro en fun-ción de diversos valores del coeficiente derozamiento. e) ¿Se conserva la energía totaldel cilindro cuando éste rueda sin resbalar?
21.33.- Repetir el Problema 21.32 para el casode una esfera maciza.
21.34.- Presionamos con el dedo una pelota de
Prob. 21.34
ping-pong contra la mesa, de tal modo que alescapársenos sale lanzada hacia adelante con
una velocidad de traslación v0 al mismo tiempoque gira con velocidad angular ω0, como semuestra en la figura adjunta. Sea μ el coefi-ciente de rozamiento entre la pelota y la mesa.a) Determinar la relación que debe existirentre v0 y ω0 para que al cabo de cierto trayec-to la pelota quede en reposo de traslación y derotación. Calcular dicho trayecto. b) Determi-nar la relación que debe existir entre v0 yω0 para que la pelota, después de anularse suvelocidad de traslación, regrese hacia el puntoinicial de lanzamiento con una velocidad angu-lar ω0/2.
2 1 . 3 5 . - U n aC
M
Y
CM
MY
CY
CMY
K
Acr525.pdf 04/11/2006 05:22:43
Prob. 21.35
esfera maciza, deradio r y masa mestá apoyadasobre dos aristas,A y B, separadaspor una distanciar, como semuestra en lafigura. Si seretira rápidamen-te el apoyo B y no hay deslizamiento en elapoyo A, calcular: a) la aceleración angularinicial de la esfera; b) la reacción inicial en elapoyo A; c) el valor mínimo del coeficiente derozamiento estático para que inicialmente nose produzca resbalamiento.
21.36.- Una regla de 1 m de longitud y 200 gde masa puede girar alrededor de un eje hori-zontal fijo que pasa por su centro. En elinstante inicial la regla se encuentra en reposoy horizontal. Desde una altura de 50 cm porencima de la regla se deja caer sobre ella unabola de plastilina de 40 g de masa, que quedapegada a la regla a una distancia de 20 cm desu centro. a) Determinar la velocidad angularde la regla y la velocidad de la bola un instan-te después de producirse el choque. b) Expre-sar la velocidad angular de la regla en funcióndel ángulo que formará en cada instante con lahorizontal. c) Analizar el resultado anterior yaveriguar como será el movimiento de la regla.
21.37.- Una esfera maciza y homogénea, demasa m y radio r resbala sin rodar sobre unasuperficie horizontal rugosa bajo la acción de

652 Lec. 21.- Dinámica del sólido rígido.
una fuerza F
Prob. 21.37
dirigida hori-zontalmentey aplicada auna alturah<r, como seindica en lafigura. De-terminar laaceleraciónde la esfera yel valor mínimo del coeficiente de rozamientoentre ésta y el plano para que no se produzcadeslizamiento.
21.38.- Deseamos acelerar una esfera de 2 kgde masa y 5 cm de radio, situada sobre unplano horizontal, ejerciendo sobre ella unafuerza horizontal constante cuya línea deacción pasa por el centro de la esfera. Si elcoeficiente de rozamiento estático entre laesfera y el plano vale 0.3: a) ¿Cuál será lamáxima aceleración que podemos comunicar ala esfera con tal de que ruede sin resbalarsobre el plano? b) ¿Cuál será la magnitud dela fuerza que produzca esa aceleración máxi-ma?
21.39.- Una esfera maciza y homogénea
Prob. 21.39
descansa sobre una plataforma horizontal,como se indica en la figura. El rozamientoentre la plataforma y esfera es suficiente paraevitar el deslizamiento de ésta. Aplicamos a laplataforma una fuerza horizontal constante.a) Determinar las aceleraciones (absolutas) queadquirirán la plataforma y el centro de laesfera. b) Encontrar la aceleración angular dela esfera (módulo y dirección).
21.40.- Un yo-yo está formado por dos discospesados, de radio R y masa total M, unidos porun eje ligero de radio r, alrededor del cual searrolla el hilo. Un muchacho sostiene elextremo libre del hilo en una posición fija ydeja caer el yo-yo verticalmente. El yo-yo seacelera hacia abajo, llega el instante en que sedesenrolla todo el hilo y, entonces, comienzaa subir enrollándose de nuevo el hilo sobre sueje. a) Explicar detalladamente el movimientodel yo-yo. ¿Por qué vuelve a subir? b) Calcu-lar la aceleración del yo-yo y la tensión en el
hilo en los movimientos de bajada y desubida?
21.41.- El cuerpo representado en la figura está
Prob. 21.41
formado por dos discos pesados, de radio R ymasa total M, unidos mediante un eje ligero,de radio r, en torno al cual se ha enrollado unhilo. Supongamos que tiramos horizontalmentedel extremo libre del hilo, como se muestra enla figura, con una fuerza constante F. Determi-nar el sentido del movimiento y la aceleracióndel cuerpo en el supuesto de que existarozamiento suficiente para impedir elresbalamiento.
21.42.- Un bloque de masa m desliza sobre un
Prob. 21.42
plano horizontal liso y está unido a un cilindrode masa M y radio R mediante un hilo ligeroque pasa por la garganta de una polea de masadespreciable. El hilo está arrollado en torno delcilindro con un gran número de vueltas.a) Calcular la tensión del hilo durante elmovimiento del sistema y las aceleracionesque intervienen. b) Analizar los resultadosanteriores para las situaciones límites m→0 ym→∞.
21.43.- Una cinta muy flexible y ligera, de
Prob. 21.43
1 m de longitud, está enrollada fuertementesobre un cilindro de 2 kg de masa y 5 cm dediámetro. Abandonamos el cilindro de modo
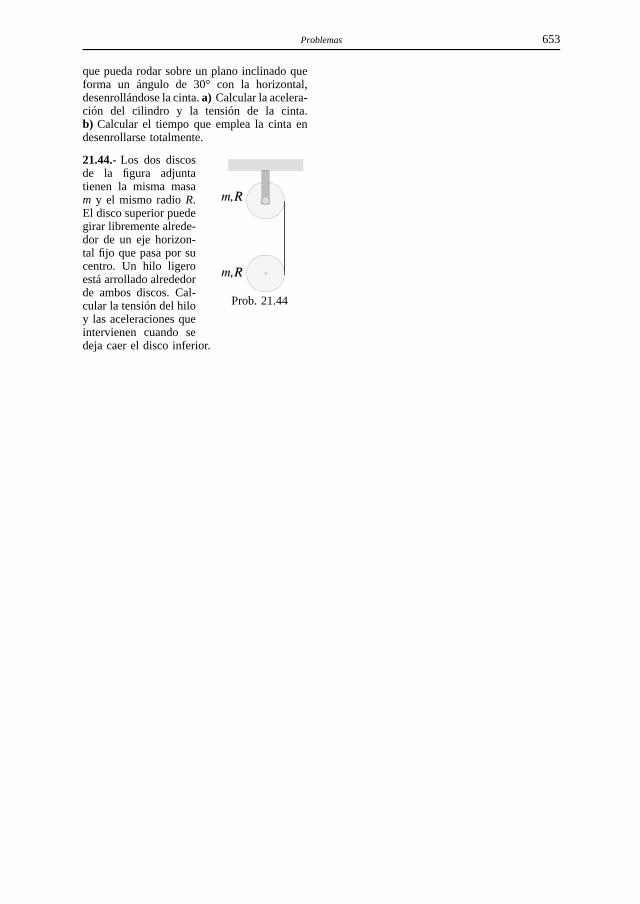
Problemas 653
que pueda rodar sobre un plano inclinado queforma un ángulo de 30° con la horizontal,desenrollándose la cinta. a) Calcular la acelera-ción del cilindro y la tensión de la cinta.b) Calcular el tiempo que emplea la cinta endesenrollarse totalmente.
21.44.- Los dos discos
Prob. 21.44
de la figura adjuntatienen la misma masam y el mismo radio R.El disco superior puedegirar libremente alrede-dor de un eje horizon-tal fijo que pasa por sucentro. Un hilo ligeroestá arrollado alrededorde ambos discos. Cal-cular la tensión del hiloy las aceleraciones queintervienen cuando sedeja caer el disco inferior.

654 Lec. 21.- Dinámica del sólido rígido.

22.- Trabajo y energía en el movimientogeneral del sólido rígido.
§22.1. Energía cinética del sólido rígido (655); §22.2. Energía cinética de rotación (657);§22.3. Eje instantáneo de rotación y deslizamiento (660); §22.4. Rodadura (661);§22.5. Resistencia a la rodadura (663); §22.6. Expresión del trabajo (666); §22.7. Teoremade la energía cinética (667); §22.8. Conservación de la energía (668); Problemas (672)
§22.1. Energía cinética del sólido rígido.- Entendemos por energía cinéticadel sólido rígido la suma de las energía cinéticas del todas las partículas que loconstituyen. Como ya sabemos, la energía cinética es una magnitud física escalarrelativa al observador en el referencial fijo XYZ.
Quedó demostrado en la Lección 5 (Cinemática del sólido rígido) que elmovimiento más general del sólido rígido puede reducirse a una rotación develocidad angular ω con respecto a un eje que pasa por un punto arbitrario o, másuna traslación cuya velocidad vo es la correspondiente a dicho punto. Así, la veloci-dad, en el referencial fijo, de un punto genérico Pi del sólido viene dada por
Figura 22.1
[22.1]v i v o ω × r i
donde ri = oPi es el vector de posicióndel punto genérico Pi respecto delpunto arbitrario o perteneciente alsólido.
Si consideramos una partículagenérica de las que constituyen el cuer-po, digamos la partícula i-ésima (Figu-
ra 22.1), su energía cinética en el refe-rencial fijo XYZ es
[22.2]Ek,i12mi v
2i
Manuel R. Ortega Girón 655

656 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
de modo que la energía cinética total del cuerpo Ek, teniendo en cuenta la relación[22.1], es
[22.3]Eki
12mi v
2i
12 i
mi (v o ω × r i)2
y desarrollando
[22.4]Ek
12 i
mi v2o
12 i
mi (ω × r i)2
imiv o (ω × r i)
y puesto que ni vo ni ω son propias de la partícula i-ésima, podemos escribir
[22.5]Ek
12mv2
o12 i
mi (ω × r i)2 (v o × ω )
imir i
donde m es la masa del cuerpo. Esta es la expresión general de la energía cinética delsólido rígido y es válida cualquiera que sea el punto o perteneciente al sólido conrespecto al cual se mide ri.
En la expresión [22.5] vemos que la energía cinética del sólido rígido, medida enel referencial fijo XYZ, puede separarse en tres partes.
El primer término corresponde a la energía cinética asociada con el movimientodel punto o, como si en dicho punto estuviese concentrada toda la masa del cuerpo.
El segundo término representa la energía cinética del sólido rígido asociada consu movimiento con respecto al punto o perteneciente al mismo, ya que ω × ri =vi - vo.
El tercer término no tiene una interpretación tan fácil como los dos anteriores einteresa anularlo mediante una elección conveniente del punto o del sólido respectoal que se mide ri. Esto será posible en los tres casos siguientes:
a) Si elegimos el punto o coincidiendo con el centro de masa del sólidorígido, ya que entonces se anulará el sumatorio.
Esto es, por representar la posición del centro de masa de un cuerpo en el referencialimir i 0
que tiene su origen, precisamente, en dicho centro de masa.
b) Si elegimos el punto o de modo que su velocidad sea nula en elreferencial inercial (XYZ); en estas condiciones también será nulo el primertérmino de la expresión [22.5].
Esta elección será evidente cuando el sólido rígido esté girando alrededor de un eje fijo respectoal sólido y que mantiene fijo al menos uno de sus puntos en el referencial inercial XYZ.
c) Si elegimos el punto o de tal modo que su velocidad sea paralela al vectorde velocidad angular ω; i.e., si el punto o está situado sobre el ejeinstantáneo de rotación y deslizamiento.
En cualquiera de los tres casos anteriores se consigue una simplificaciónconsiderable. Concretando al caso en que o ≡ CM, tenemos

§22.1.- Energía cinética del sólido rígido. 657
[22.6]Ek
12mv2
cm12 i
mi (ω × r i)2
Obsérvese que podemos separar el movimiento del sistema en dos partes, cadauna de ellas con una energía cinética bien definida. El primer término del segundomiembro de [22.6] corresponde al movimiento del centro de masa del sistema yrepresenta la energía cinética de traslación del cuerpo. El segundo términocorresponde al movimiento de las distintas partes del cuerpo con respecto al centrode masa. Puesto que en un sólido rígido el centro de masa está fijo en el cuerpo, elúnico movimiento que puede tener el cuerpo con respecto a su centro de masa es elde rotación, de modo que el segundo término de [22.6] representa la energía cinéticade rotación del cuerpo con respecto a un eje que pasa por su centro de masa1. Porconsiguiente, podemos escribir
[22.7]Ek Ek,t Ek,r
que corresponde a la formulación del TEOREMA DE KŒNIGS para la energía cinéticadel sólido rígido:
En el movimiento general del sólido rígido, la energía cinética total puede
Figura 22.2
expresarse como la suma de la energía cinética de traslación del centro demasa y de la energía cinética de rotación en torno a un eje que pasa por elcentro de masa.
§22.2. Energía cinética derotación.- Debemos entender que laenergía cinética de rotación essimplemente la suma de las energíascinéticas de traslación ordinarias detodas las partículas del cuerpo referidasal centro de masa del mismo, y no una"nueva clase de energía". Esto se ponebien en evidencia si tenemos en cuentaque v′i = vi - vcm = ω × ri es la velocidadde la partícula i-ésima del cuerpo conrespecto al centro de masa de éste, demodo que
[22.8]Ek,ri
12mi (ω × r i)
2
i
12miv′
2i
Así pues, la energía cinética de rotación es solamente una forma conveniente dedesignar una parte de la energía cinética del sólido rígido (energía cinética interna).
1 Pueden hacerse las mismas consideraciones si el punto o está fijo en el sistema de referenciaXYZ o si pertenece al eje instantáneo de rotación y deslizamiento. En lo que sigue nos referiremosal centro de masa, aunque no descartaremos nunca las otras posibilidades.

658 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
Resulta muy conveniente expresar la energía cinética de rotación en función delos momentos y productos de inercia del sólido rígido en un referencial móvil, xyz,ligado al cuerpo, al que llamaremos referencial solidario (Figura 22.2). Poniendo v′i =vi - vcm = ω ×ri, dicha energía puede expresarse en la forma
[22.9]Ek,r
12 i
mi v′i (ω × r i)
que, permutando los vectores del producto mixto, se convierte en
[22.10]Ek,r
ω2 i
(mi r i × v′i)
Se comprende fácilmente que la suma corresponde al momento angular del cuer-po respecto al origen o del referencial móvil, de modo que
[22.11]Ek,r
12
ω L ⇒ Ek,r
12
ω II ω
Haciendo las operaciones indicadas en la expresión anterior, tenemos
Ek,r
12
ω II ω 12
ω x ω y ω z
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
Ixx Ixy Ixz
Iyx Iyy Iyz
Izx Izy Izz
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
ω x
ω y
ω z
[22.12]12Ixxω
2x
12Iyyω
2y
12Izzω
2z Ixyω xω y Iyzω yω z Izxω zω x
que es la expresión de la energía cinética de rotación.Si utilizamos el sistema de ejes principales de inercia ligado al cuerpo
(Figura 22.4), la expresión anterior toma una forma más sencilla
[22.13]Ek,r
12I1ω
21
12I2ω
22
12I3ω
23
Obsérvese que podemos obtener las componentes del momento angular a partir de lasexpresiones [22.12] o [22.13] de la energía cinética; esto es,
[22.14]Lx∂Ek,r
∂ω x
Ly∂Ek,r
∂ω y
Lz∂Ek,r
∂ω z
o bien [22.15]L1
∂Ek,r
∂ω1
L2
∂Ek,r
∂ω2
L3
∂Ek,r
∂ω3
En todo caso, siempre podemos encontrar una expresión más simple que la [22.12]
o la [22.13] para la energía cinética de rotación. Nos bastará considerar el versor e enla dirección de la velocidad angular ω, de modo que

§22.2.- Energía cinética de rotación. 659
[22.16]ω ω e
y entonces la expresión [22.11] puede escribirse en una forma que, sin duda, nosresultará más familiar
[22.17]Ek,r
ω2
2e II e 1
2Iω2
ya que I = e II e, como ya vimos en §16.10 (expr. [16.69]), siendo I el momento deinercia del sólido rígido respecto al eje de rotación, sea éste principal o no.
Podemos deducir la expresión [22.17] de un modo más
Figura 22.3
elemental y rápido sin más que sumar las energías cinéticas detodas la partículas del sólido rígido dotado de una rotación puracon una velocidad angular ω alrededor de un eje (Figura 22.3). Enefecto,
[22.18]Ek,r
N
i 1
12mi v
2i
12
⎛⎜⎜⎝
⎞⎟⎟⎠
N
i 1
mi δ2i ω2 1
2I ω2
ya que miδi2, donde δi es la distancia de la partícula i-ésima aleje, es el momento de inercia del sólido con respecto a dicho eje.
La expresión [22.17] de la energía cinética de rotaciónes análoga a la expresión de la energía cinética de unapartícula, mv2/2. Ya sabemos que la velocidad angular ωes análoga a la velocidad v; ahora vemos que el momento de inercia es análogo a lamasa m. Como la masa representa la resistencia o inercia del cuerpo a los cambiosde movimiento (de traslación), el significado físico del momento de inercia quedabien claro: el momento de inercia de un cuerpo con respecto a un eje dado representala resistencia o inercia del cuerpo a los cambios de movimiento (de rotación) en tornoa dicho eje. Notemos que en tanto que la masa es una constante característica delcuerpo, el momento de inercia depende del eje considerado.
El momento angular del sólido rígido, en el
Figura 22.4
sistema de ejes principales ligado al cuerpo (Figu-
ra 22.4), viene dado por
[22.19]L II ω
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1ω1
I2ω2
I3ω3 e1e2e3
donde (e1, e2, e3) son los versores en las direccionesde los ejes principales y (ω1, ω2, ω3) son lascomponentes de ω en las direcciones de dichosejes. Así pues, tenemos que
[22.20]L1 I1 ω1 L2 I2 ω2 L3 I3 ω3

660 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
de modo que, combinando las expresiones [22.20] y [22.13], podemos expresar laenergía cinética de rotación del sólido rígido en la forma
[22.21]Ek,r
L 21
2I1
L 22
2I2
L 23
2I3
expresión que se reduce a [22.22]Ek,r
L 2
2I
en el caso particular en que la rotación del sólido tenga lugar alrededor de un ejeprincipal de inercia.
§22.3. Eje instantáneo de rotación y deslizamiento.- Como ya sabemos, elmódulo de la velocidad vi de un punto Pi del sólido rígido es mínimo cuando dichavelocidad es paralela a la velocidad angular ω y el lugar geométrico de tales puntoses una recta, en la dirección de ω, llamada eje instantáneo de rotación y deslizamien-to.
Consideremos un punto genérico
Figura 22.5
(Pi) perteneciente al sólido; si severifica que ω vi ≠ 0 (i.e., si el inva-riante escalar no es nulo), el movimien-to del sólido resulta equivalente a unarotación pura alrededor del eje instantá-neo de rotación y deslizamiento másuna traslación a lo largo de dicho eje(Teorema de Chasles), ya que lospuntos del sólido situados en ejeinstantáneo de rotación y deslizamientotienen una velocidad paralela a lavelocidad angular ω. Bajo estas condi-
ciones es cuando podemos hablar con propiedad del eje instantáneo de rotación ydeslizamiento y el movimiento del sólido se reduce a un movimiento helicoidal tan-gente.
Si en la expresión [22.5] de la energía cinética total del sólido rígido, que esválida cualquiera que sea el punto o del cuerpo, elegimos dicho punto o sobre el ejeinstantáneo de rotación y deslizamiento, entonces, puesto que vo ω, será nulo eltercer término del segundo miembro de [22.5], de modo que nos queda
[22.23]Ek
12mv 2
o12 i
mi (ω × r i)2
de modo que la energía cinética total del sólido puede separarse en dos partes:
energía cinética de traslación correspondiente al deslizamiento del cuerpoa lo largo del eje instantáneo de rotación y deslizamiento y energía cinéticade rotación en torno a dicho eje.

§22.3.- Eje instantáneo de rotación y deslizamiento. 661
Obsérvese que los puntos del eje instantáneo de rotación tienen, en lo que respectaa la energía cinética, propiedades idénticas a las del centro de masa del cuerpo, peronótese también que, a diferencia del centro de masa, los puntos del eje instantáneode rotación no son siempre los mismos.
Si el invariante escalar es nulo, o sea ω vi = 0, sin ser nulo ω, entonces deberáser vi ⊥ ω de modo que cada partícula del cuerpo se moverá en un planoperpendicular al eje instantáneo de rotación (o sea al vector ω). Como para los puntosdel eje instantáneo de rotación debe ser, además, vi ω, la velocidad de dichospuntos deberá ser nula. Por consiguiente, el sólido pasará en cada instante por unestado de rotación pura, con velocidad angular ω, alrededor del eje instantáneo derotación, pero sin que exista (en este caso) deslizamiento a lo largo de dicho eje. Estemovimiento se denomina movimiento de rodadura, y en él los puntos del ejeinstantáneo de rotación se encuentran "instantáneamente" en reposo en el referencialfijo.
§22.4. Rodadura.- En el caso de que el movimiento del cuerpo sea unarodadura, será nulo el primer término del segundo miembro de [22.23] (al no existirdeslizamiento a lo largo del eje instantáneo de rotación), de modo que
la energía cinética del sólido rígido corresponderá a la energía cinética deuna rotación pura alrededor del eje instantáneo de rotación (sin desliza-miento).
Dicho eje se encontrará instantáneamente en reposo en el referencial fijo; i.e.,
[22.24]Ek Ek,r
12 i
mi (ω × r i)2
que es la misma ec. [22.8] establecida anteriormente. Obviamente, esta energía cinéticade rotación puede expresarse en función del momento de inercia del cuerpo respectoal eje instantáneo de rotación y obtendremos de nuevo la expr. [22.17], que es válidapara cualquier eje de rotación. Esto es
[22.25]Ek Ek,r
12Ioω
2
donde el subíndice o indica que estamos considerando un eje de rotación que pasapor el punto o.
Podemos completar el enunciado del TEOREMA DE KŒNIGS:
el movimiento de rodadura, los efectos combinados de la traslación delcentro de masa y de la rotación en torno a un eje que pasa por él sonequivalentes a una rotación pura, con la misma velocidad angular, alrededordel eje instantáneo de rotación.
Ilustraremos los resultados anteriores con un ejemplo sencillo: el de un cilindro que ruedasobre una superficie plana.
Destacaremos, en primer lugar, que la condición de "rodar" impone unas determinadas relacio-nes cinemáticas entre el movimiento lineal y el movimiento angular del móvil. La Figura 22.6muestra un cilindro que rueda sobre una superficie horizontal. Cuando el cilindro gira un cierto

662 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
ángulo θ, el centro del mismo experimenta un desplaza-
Figura 22.6
miento x; la relación existente entre estas dos magnitu-des es
[22.26]x θ R
siendo R el radio del cilindro. A partir de esta relaciónencontramos fácilmente, por derivación respecto deltiempo, la relación existente entre la velocidad delcentro del cilindro y la velocidad angular
[22.27]v ω R
Una segunda derivación nos permite relacionar la aceleración lineal del centro del cilindro con laaceleración angular;
[22.28]a α R
La condición de rodadura significa que, en un
Figura 22.7
instante cualquiera, los puntos del cilindro que estánen contacto con la superficie se encuentran momen-táneamente en reposo. Dichos puntos determinan eleje instantáneo de rotación pura del cilindro. Losdemás puntos del cilindro tendrán en ese instanteuna cierta velocidad, perpendicular al eje instantá-neo de rotación y a la línea que une dicha partículacon dicho eje y de módulo proporcional a dichadistancia. Esto equivale a decir que el cilindro estágirando en cada instante alrededor de la generatrizdel cilindro que está en contacto con la superficie,con una cierta velocidad angular ω. Por consiguien-
te, en un instante dado, el movimiento del cilindro equivale a una rotación pura, y su energíacinética será
[22.29]Ek
12Ioω
2
donde Io representa el momento de inercia del cilindro con respecto al eje de rotación instantáneo.
El teorema de Steiner nos permite escribir
[22.30]Io Icm mR 2
siendo Icm el momento de inercia del cilindro, de masa m y radio R, con respecto a un eje paraleloal eje instantáneo de rotación pura y que pasa por el centro de masa del cuerpo. Entonces laec. [22.29] puede ponerse en la forma
[22.31]Ek
12Icmω2 1
2mR 2ω2
Pero la cantidad ωR es la velocidad vcm de traslación del centro de masa del cilindro, de modo que
[22.32]Ek
12Icmω2 1
2mv 2
cm
Podemos interpretar la expr. [22.32], que fue obtenida partiendo de un movimiento de rotaciónpura, analizando separadamente el significado de cada uno de los términos: el primero, ½Icmω2,

§22.4.- Rodadura. 663
corresponde a la energía cinética que tendría el cilindro si estuviera simplemente girando en torno
Figura 22.8
a un eje que pasase por su centro de masa (sin traslación); el segundo término, ½mv2cm, corresponde
a la energía cinética que tendría el cilindro si sólo tuviera un movimiento de traslación (sinrotación) con la velocidad de su centro de masa. De hecho, la ec. [22.32], que es la misma ec.[22.6], es válida para cualquiera sólido rígido que presente un movimiento general (rototraslatorio).
§22.5. Resistencia a la rodadura.- Estamos ahora en condiciones de estudiarla resistencia a la rodadura, en el bien entendido de que esta resistencia sólo sepresenta cuando un cuerpo real (deformable) rueda sobre una superficie real(deformable). Como veremos, no tiene sentido alguno hablar de resistencia a larodadura en el caso de un sólido rígido (indeformable) que rueda sobre una superficieindeformable.
En efecto; la resistencia a la rodadura aparece
Figura 22.9
cuando el cuerpo que rueda, o la superficie sobre laque rueda, o ambos a la vez, se deforman, aunquesólo sea ligeramente, a causa de las grandes pre-siones existentes en los puntos de contacto. Pense-mos en el caso de un cilindro que se apoya sobreuna superficie plana; todo el peso del cilindrogravita sobre una exigua superficie de contacto (unageneratriz, desde un punto de vista estrictamentegeométrico). Es fácil comprender que la presión en el contacto será tan grande quehasta el material más rígido se deformará. De ese modo, el cuerpo, la superficie quelo soporta o ambos, se deforman, aumentando el área de contacto hasta que la presióndisminuye y se restablece una situación de equilibrio elastostático. En resumen, alrodar un cuerpo real sobre una superficie real se producen unas deformaciones, comose muestra en la Figura 22.9, de modo que el cuerpo tiene que "vencer" continuamenteun pequeño obstáculo que se le presenta por delante y que se opone a su rodadura.
Consideremos, para comenzar, el caso ideal de un cuerpo indeformable (un cilin-dro o una rueda, por ejemplo) que puede rodar sobre una superficie plana tambiénindeformable (Figura 22.10). Si la superficie es horizontal, las fuerzas que actúan sobreel cilindro son: su peso P y la reacción normal del plano N.

664 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
Si ahora aplicamos una fuerza F sobre el eje
Figura 22.10
del cilindro, paralelamente al plano y perpendicu-larmente al eje, aparecerá una fuerza de rozamiento,f, en A, en dirección opuesta a la fuerza aplicada F.El momento de la fuerza de rozamiento respectodel eje del cilindro, M = fR hace girar el cilindroalrededor de su eje.
Así, en el caso de cuerpos indeformables sopor-tados por superficies indeformables, por pequeñaque sea la fuerza F se producirá la rodadura
(siempre que exista suficiente rozamiento estático para evitar el deslizamiento). Enestas condiciones no tienen sentido hablar de resistencia a la rodadura.
Sin embargo, en las situaciones reales, los cuerpos se deforman, por poco quesea. El contacto no se realiza entonces a lo largo de una generatriz (en el ejemploanterior) sino a lo largo de una estrecha banda A′A″, como se muestra en la Figu-
ra 22.11. Ello da lugar a que aparezcan reacciones en los apoyos; reacciones que danlugar a la aparición de un par que se opone la rodadura. Con la finalidad de simplifi-car el problema, podemos imaginar que en cada instante el cilindro debe rotar sobrela generatriz que pasa por A″ para poder rodar superando el pequeño obstáculo quese opone a ello. Eso equivale a considerar desplazada la línea de acción de lareacción normal N una distancia que designaremos por μr, como se muestra en la Figu-
ra 22.11. El par de resistencia a la rodadura y el par aplicado valen, respectivamente
Figura 22.11
[22.33]Mres μ r N Mapl R F
En las condiciones críticas, cuando está a punto decomenzar la rodadura, esos dos momentos serániguales, de modo que
[22.34]Marranque R F μ r N
de modo que el cilindro comenzará a rodar si Mapl
> Marr = μr N. De la ec. [22.34] se deduce
[22.35]Fμ r
RN
que nos da el valor de la fuerza mínima necesaria para el arranque. La magnitud μr,que tiene dimensiones de una longitud, es el llamado coeficiente de resistencia a larodadura2. De la ec. [22.34] se deduce que el par de arranque es proporcional a lareacción normal N. De la ec. [22.35] se sigue que la fuerza de tracción necesaria parael arranque es inversamente proporcional al radio del cilindro; esa es la ventaja delas ruedas grandes sobre las pequeñas.
El valor del coeficiente μr depende de la naturaleza de los cuerpos en contacto(fundamentalmente de su rigidez). En general, la relación μr/R (adimensional) tieneun valor muy inferior al del coeficiente de rozamiento por deslizamiento (estático y
2 Obsérvese que se ha evitado mencionar la idea de "rozamiento de rodadura".

§22.5.- Resistencia a la rodadura. 665
cinético); así pues, es mucho más conveniente, al efecto de disminuir las pérdidasenergéticas, sustituir en los mecanismos y máquinas los deslizamientos por lasrodaduras; esa es la ventaja del carro sobre el trineo.
Ejemplo I.- En una bolera, lanzamos una de las bolas a lo largo de la pista de modo que inicial-
Figura 22.12
mente resbala sin rodar (traslación pura), con una velocidad v0. Gradualmente se va produciendola transición de la traslación pura a la rodadura. a) Demostrar que la bola comenzará a rodar sinresbalar cuando su velocidad se haya reducido a 5v0/7. b) Calcular el tiempo empleado, el desplaza-miento horizontal y el ángulo girado por la bola durante la transición de la traslación pura a larodadura. Expresar los resultados enfunción del coeficiente de roza-miento μ entre la bola y la pista yde la velocidad inicial v0 de la bola.
Las fuerzas que actúan sobre labola son: el peso de la bola (mg), lareacción (N) y el rozamiento (f),como se indica en la Figura 22.12.La única fuerza que posee compo-nente horizontal (i.e., en la direccióndel movimiento) y que proporcionamomento, es la fuerza de rozamiento(estático) cuyo módulo puedeexpresarse en función de la masa dela bola:
f μ N μ mg
a) Las ecuaciones para el movimiento de traslación y para el movimiento de rotación, tomandomomentos con respecto al centro de la bola, son
⎧⎪⎨⎪⎩
f m a
f R I α 25mR 2 α
⇒
⎧⎪⎪⎨⎪⎪⎩
a fm
μg
α 52
fmR
52μ gR
⇒ aα
25R
siendo R el radio de la bola, de modo que tanto la aceleración del centro de masa (a) como laaceleración angular de la bola (α) son constantes. Por consiguiente, podemos escribir:
aα
v v0
ω ω0
v v0
ω25R ⇒ v0 v 2
5ω R
con la condición inicial ω0=0.
Cuando finalmente la bola rueda (sin resbalar), con una velocidad vf y una velocidad angularωf, la condición de rodadura se expresa en la forma
vf ω f R
de modo que combinando las dos últimas ecuaciones resulta
v0 vf
25vf ⇒ vf
57v0

666 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
que es la velocidad pedida.
b) Puesto que el movimiento de la bola es uniformemente acelerado, tanto en lo que concierne ala traslación como a la rotación, durante la transición de la traslación pura a la rodadura, podemosescribir
Δtvf v0
aΔx
v 2f v 2
0
2aΔθ
ω 2f
2 α
con a μg α 52μ gR
vf
57v0 ω f
vf
R57
v0
R
de modo que el tiempo y los desplazamientos pedidos serán
Δt 27
v0
μ gΔx 12
49
v 20
μ gΔθ 5
49
v 20
μgR
§22.6. Expresión del trabajo.- Consideremos, de nuevo, un sólido rígido querealiza un movimiento general (rototraslatorio) bajo la acción de un sistema defuerzas que actúa sobre él. Nuestro propósito es encontrar la expresión del trabajoelemental realizado por dicho sistema de fuerzas durante un movimiento elementaldel sólido.
Si sobre un punto Pi actúa una fuerza externa resultante Fi, durante un intervalode tiempo infinitesimal dt el punto de aplicación de dicha fuerza experimentará undesplazamiento elemental dRi, dado por
[22.36]dR i dR o ω dt × r i dR o dθ (e × r i)
siendo e el versor en la dirección de la velocidad angular ω, de modo que ω = ω e.Por lo tanto, el trabajo elemental realizado por la fuerza Fi es
[22.37]dWi F i dR i F i dR o (r i × F i) e dθ
y sumando los trabajos elementales correspondientes a todas las fuerzas que actúansobre el cuerpo
[22.38]dW (iF i) dR o (
ir i × F i) e dθ F dR o M o dθ
siendo F = Fi y Mo = (ri×Fi) la resultante y el momento resultante del sistema defuerzas actuantes sobre el sólido, respectivamente, tomando el punto o como centrode reducción u origen de momentos.
Aunque la expresión [22.38] es válida cualquiera que sea el punto o, pertenecienteal cuerpo, que elijamos como centro de reducción, corrientemente, dicho centro dereducción lo hacemos coincidir con el centro de masa del cuerpo, de modo que laexpresión [22.38] nos permite enunciar:
El trabajo elemental realizado por las fuerzas que actúan sobre un sólidorígido, durante un movimiento elemental del mismo, es la suma del trabajo

§22.6.- Expresión del trabajo. 667
relacionado con la traslación elemental del centro de masa (bajo la acciónde la resultante de dicho sistema de fuerzas) y del trabajo asociado con larotación elemental del sólido (bajo la acción del momento resultante respectoal c.m. de dicho sistema de fuerzas) alrededor de un eje instantáneo que pasapor el centro de masa.
Obsérvese la analogía formal
Figura 22.13
existente entre la expresión del tra-bajo elemental de traslación (F dr)y el trabajo elemental de rotación(M dθ).
Para obtener la rapidez con quese realiza trabajo en el movimientogeneral del sólido rígido bajo la ac-ción de un sistema de fuerzas,dividiremos ambos miembros de[22.38] por el intervalo de tiempoinfinitesimal durante el cual elcentro de reducción (o) experimentael desplazamiento dRo y el cuerpogira un ángulo dθ; así, obtenemospara la potencia la expresión
[22.39]P dWdt
F v o M ω
donde podemos observar, una vez más, la analogía existente entre la dinámica tras-lacional y rotacional.
§22.7. Teorema de la energía cinética.- El sólido rígido constituye un casoespecial de los sistemas de partículas en el que las condiciones de rigidez permitenasegurar que el trabajo interno (realizado por las fuerzas internas) será nulo encualquier movimiento del sistema.
La fuerza resultante que actúa sobre el sólido rígido puede considerarsecompuesta de dos partes: la resultante de las fuerzas externas y la de las fuerzasinternas, dadas por
[22.40]F extiFi,ext F int
iFi,int
de modo que [22.41]F F ext F int
Consideraciones análogas podemos hacer para el momento resultante de lasfuerzas que actúan sobre el sólido:
[22.42]Mo,extir i × Fi,ext Mo,int
ir i × Fi,int
con [22.43]M o Mo,ext Mo,int

668 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
Sustituyendo las expresiones [22.41] y [22.43] en la expresión [22.38] del trabajoelemental, donde ya están incluidas implícitamente las condiciones de rigidez (¿porqué?), tenemos
[22.44]dW F ext dR o Mo,ext dθ Fint dR o Mo,int dθ dWext dWint
y puesto que, en general, para un sistema de partículas es
[22.45]F int 0 Mo,int 0
resulta que el trabajo interno es siempre nulo, en el caso de un sólido rígido, en unmovimiento arbitrario y general (dRo, dθ) del mismo.
En consecuencia, el teorema de la energía cinética se reduce a
[22.46]dWext dEk dEk,t dEk,r
que podemos enunciar diciendo que
el cambio en la energía cinética (total) de un sólido rígido es igual al trabajorealizado sobre el mismo por las fuerzas externas.
§22.8. Conservación de la energía.- En un sólido rígido, puesto que laspartículas que lo constituyen mantienen fijas sus posiciones relativas unas respectoa otras en cualquier proceso en el que esté implicado el sólido, la energía potencialinterna (que depende tan sólo de esas posiciones relativas) permanecerá constante,de modo que no la tendremos en cuenta cuando calculemos la energía total delsistema (recordaremos que tan sólo tienen significado los cambios en la energíapotencial, ya que la elección de un nivel de energía potencial nula es arbitrario).
Si las fuerzas externas que actúan sobre el sólido rígido son conservativas,tendremos
[22.47]dW dEp
donde hemos prescindido de los subíndices ext, ya que al ser nulo el trabajo internoy al ignorar la energía potencial interna no hay necesidad de especificar que nosreferimos al trabajo y energía potencial externos.
Combinando las expresiones [22.46] y [22.47] tenemos
[22.48]dW dEk dEp
de modo que [22.49]dE d(Ek Ep) 0
donde [22.50]E Ek Ep cte
es la energía total del sólido rígido. La expresión anterior constituye la ley de laconservación de la energía, en el supuesto de que las fuerzas (externas) seanconservativas.
Si algunas de las fuerzas externas que actúan sobre el sólido rígido no sonconservativas, entonces deberemos escribir

§22.8.- Conservación de la energía. 669
[22.51]dW dWc dWnc dEk
y puesto que dWc = - dEp, será
[22.52]dWnc dEk dEp d (Ek Ep) dE
y el trabajo de las fuerzas no conservativas es igual a la variación de la energíamecánica total del sólido rígido.
Ejemplo II.- Acoplamiento de discos.- Un disco
Figura 22.14
homogéneo, de masa m y radio r, está girando libre-mente alrededor de su eje con una velocidad angular ω0.Un segundo disco, cuyo eje es paralelo al del primero,también homogéneo, de masa 4m y radio 2r, se encuen-tra inicialmente en reposo. Acercamos el segundo discoal primero, manteniendo los eje paralelos entre sí, demodo que se ponen en contacto por sus bordes; enton-ces, el mayor comienza a girar y el pequeño se frena.a) Determinar las velocidades angulares de ambosdiscos cuando dejen de resbalar, uno con respecto aotro, en el punto de contacto. b) ¿Se conserva el mo-mento angular del sistema? c) ¿Se conserva la energía cinética del sistema?
Los momentos de inercia del disco pequeño (Ip) y del disco grande (Ig) con respecto a sus ejesrespectivos son:
Ip12mr 2 Ig
12
(4m) (2r)2 8 mr 2
de modo que Ig 16 Ip
a) Las fuerzas que actúan sobre cada uno de los discos son las que se indican en laFigura 22.14. Tomando momentos con respecto al eje de cada uno de los discos tenemos las ec.del movimiento de cada uno de ellos:
[1]rf Ip α p 2rf Ig α g
de modo que αp=cte y αg=cte, por lo que el movimiento de cada uno de los discos durante elacoplamiento es uniformente acelerado. Dividiendo miembro a miembro las ec. [1], obtenemos
[2]12
Ip α p
Ig α g
⇒α p
α g
Ig2 Ip
8 ⇒ω ω0
Ω8 ⇒ ω 8 Ω ω0
Cuando, finalmente, los discos dejan de resbalar en el punto de contacto mutuo, se cumplirá:
[3]r ω 2rΩ ⇒ ω 2 Ω 0
y resolviendo el sistema de ecuaciones [2]-[3] obtenemos las velocidades angulares pedidas:
ωω0
5Ω
ω0
10
b) Calcularemos los momentos angulares inicial (L0) y final (L) del sistema:

670 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
⎧⎪⎨⎪⎩
L0 Ip ω0
L Ip ω Ig Ω Ipω0
5Ig
ω0
10⎛⎜⎝
⎞⎟⎠
15
1610
Ipω0
75Ipω0
esto es, ΔL L L0
125Ipω0
de modo que el momento angular no se conserva.
Puesto que el centro de masa de cada uno de los discos permanece estacionario (ejes fijos),la reacción en el eje de cada disco (F) es igual y opuesta a la fuerza de rozamiento cinético (f) enel borde del disco, como se ilustra en la Figura 22.14. Por consiguiente, el sistema constituido porlos dos discos está sometido a un par externo (F,-F) cuyo momento es -3rf. Entonces, igualandola impulsión del momento externo con el cambio que experimenta el momento angular del sistema,obtenemos:
Mext Δt ΔL ⇒ 3r f Δt 125Ipω0 ⇒ r f Δt 4
5Ipω0
que es la misma ec. [1a], ya que
rf Δt Ip α p Δt Ip (ω ω0 ) Ip (ω0
5ω0 ) 4
5Ipω0
Así pues, el momento angular del sistema no se conserva porque sobre el actúa un par externo(F,-F) proporcionado por los apoyos de los ejes (fijos) de los discos.
c) Calculamos las energías cinéticas inicial (Ek,0) y final (Ek) del sistema:
⎧⎪⎪⎨⎪⎪⎩
Ek,0
12Ipω
20
Ek
12Ipω
2 12Ig Ω2 ... 1
10Ipω
20
o sea ΔEk Ek Ek,0
25Ipω
20
45Ek,0
de modo que la energía cinética no se conserva, ya que durante la transición entre el estado inicial(ω0,0) y el final (ω,Ω) se produce resbalamiento entre los dos disco, lo que entraña una disipaciónde energía cinética.
Ejemplo III.- En el problema enunciado en el Ejemplo I, ... : c) Calcular el cambio que experi-menta la energía cinética de la bola durante la transición del movimiento de traslación pura a larodadura. d) Calcular el trabajo realizado por la fuerza de rozamiento y compararlo con el cambioen la energía cinética.
c) Las energías cinéticas inicial (Ek,0) y final (Ek,f) de la bola son
Ek,0
12m v 2
0
Ek,f
12m v 2
f12
⎛⎜⎝
⎞⎟⎠
25mR 2 ω 2
f12m v 2
f15m v 2
f710m v 2
f514m v 2
057Ek,0

§22.8.- Conservación de la energía. 671
de modo que el cambio que experimenta la energía cinética de la bola es
ΔEk
57Ek,f Ek,0
27Ek,0
17m v 2
0
d) Tan sólo la fuerza de rozamiento realiza trabajo sobre la bola, por lo que los trabajosasociados con la traslación y con la rotación valen
f Δx μ mg 1249
v 20
μg1249mv 2
02449Ek,0
fR Δθ μ mgR 549
v 20
μgR549mv 2
01049Ek,0
y el trabajo neto total es
Wext
2449Ek,0
1049Ek,0
27Ek,0
17mv 2
0
lo que confirma que Wext ΔEk
Ejemplo IV.- Un bloque homogéneo está soportado
Figura 22.15
por dos cilindros idénticos, también homogéneos,como se ilustra en la figura. Aplicamos al bloqueuna fuerza horizontal constante y suponemos queexiste rozamiento suficiente como para que loscilindros rueden sin resbalar con respecto al suelo yal bloque. Determinar la aceleración del bloque enel instante que se indica en la figura, cuando los dosrodillos están situados simétricamente con respectoal bloque.
Consideremos un desplazamiento arbitrario xdel bloque en la dirección de su movimiento, partiendo del reposo (para facilitar el razonamiento,aunque ello sea irrelevante). Puesto que la única fuerza que trabaja es la fuerza aplicada F, será
[i]W Fx ΔEk
esto es, [ii]Fx 12Mv 2 2 ⎛
⎜⎝
⎞⎟⎠
12mv 2
O12
12mR 2ω2 1
2Mv 2 mv 2
O12mR 2ω2
donde v y vO son las velocidades de traslación del bloque y de los cilindros, respectivamente,cuando ya se ha recorrido la distancia x.
Derivando la expr. [ii] con respecto al tiempo obtenemos las aceleraciones correspondientes;i.e.,
[iii]F v Mva 2mvOaO mR 2ωα
La condición de rodadura con respecto al suelo exige que la velocidad del punto Q del rodillosea nula; i.e.,

672 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
[iv]vO ω R ⇒ aO α R
Además, la condición de rodadura con respecto al bloque exige que la velocidad del punto P delbloque sea igual a la del punto P del rodillo; i.e.,
[v]v vO ω R 2 vO ⇒ a 2 aO
De las expresiones [iv] y [v] se sigue:
[vi]vO
12v aO
12a ω 1
2vR
α 12aR
que sustituidas en [iii] conducen a
F v Mva 12mva 1
4mva ⎛
⎜⎝
⎞⎟⎠
M 34m va
de modo que la aceleración pedida es
a F
M 3
4m
Ejemplo V.- Un cilindro macizo, de masa m y radio R,
Figura 22.16
está unido a un muelle, de constante elástica k, como semuestra en la figura adjunta, de modo que el cilindropuede rodar sin resbalar sobre un plano horizontal.Abandonamos el cilindro, partiendo del reposo, desdeuna posición en la que el muelle está deformado. De-mostrar que el movimiento del centro de masa delcilindro será armónico simple y determinar la frecuenciay el periodo de las oscilaciones del sistema.
Escribimos la expresión de la energía total del sistema
E Ek Ep
12mx 2 1
212mR 2θ2 1
2kx 2
con la condición de rodadura
x R θ
de modo que podemos expresar la energía total en función de una sola variable (el sistema solotiene un grado de libertad) y de su derivada temporal; i.e.,
E 12mx 2 1
4mx 2 1
2kx 2 3
4mx 2 1
2kx 2 cte
que es constante ya que el sistema es conservativo. Entonces, derivando con respecto del tiempo
dEdt
32mxx kxx 0 ⇒ x ( 3
2mx kx) 0
y, puesto que x no es siempre nula, deberá serlo el paréntesis, de modo que

§22.8.- Conservación de la energía. 673
x 2k3m
x 0
que es la ec. dif. de un movimiento armónico simple cuya frecuencia angular y periodo son
ω 2k3m
T 2π 3m2k
Problemas
22.1.- Una varilla homogénea AB está guiada
Prob. 22.1
por dos pasadores, A y B, que deslizan libre-mente por las guías situadas en un plano ver-tical que se indican en la figura adjunta. Seabandona la varilla, partiendo del reposo, en laposición 1 indicada. Determinar las veloci-dades de los pasadores A y B, así como lavelocidad de traslación y la velocidad angularde la varilla, en las posiciones 2 y 3 indicadas.
22.2.- Una varilla de longitud L se sostieneverticalmente apoyada sobre el suelo por unextremo y se la deja caer. Suponiendo que elextremo apoyado no resbala, determinar lavelocidad angular de la varilla en función delángulo que forma con la vertical y la veloci-dad del extremo libre cuando pega contra elsuelo.
22.3.- Los extremos de una varilla rectilíneay homogénea, de longitud l, están apoyadossin rozamiento en un suelo horizontal y en unapared vertical. a) Determinar la aceleraciónangular de la varilla en función del ángulo θque forma en cada instante con la vertical.b) Si abandonamos la varilla, partiendo del
reposo, cuando forma un ángulo θ0, expresar lavelocidad angular de la varilla en función delángulo θ. c) En el supuesto del apartadoanterior, determinar el valor del ángulo θ parael cual la varilla pierde contacto con la paredvertical.
22.4.- Las varillas homogéneas AB y BC que
Prob. 22.4
se muestran en la figura están articuladas en B,sus masas son 6 kg y 1.5 kg y sus longitudes40 cm y 10 cm, respectivamente. El sistema seabandona, partiendo del reposo, de la posiciónhorizontal (indicada con trazo continuo).Calcular la velocidad angular que tendrá lavarilla BC cuando pase por la vertical(indicada con trazo discontinuo).
22.5.- Las dos varillas homogéneas, de la mis-ma masa m y longitud l, que se muestran en lafigura, están articuladas entre sí en el punto A.El extremo O de la varilla superior estáarticulada a un punto fijo y el extremo B de lainferior lo está a una corredera que puededeslizar sin fricción a lo largo de un eje verti-cal. Se abandona el sistema, partiendo del re-poso, de la posición horizontal (θ=0). Determi-nar: a) la velocidad angular de cada varilla enfunción del ángulo θ; b) la velocidad de la

674 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
cor redera en
Prob. 22.5
función de θ.
22.6.- Un cilin-dro macizo yhomogéneo, der a d i o r ygeneratriz 2r,descansa apoyadoen una de susbases sobre unplano horizontalrugoso que nop e r m i t e e ldeslizamiento. Leaplicamos unafuerza horizontal, a una altura convenientesobre el plano, hasta que, apoyado en el bordede su base inferior se desequilibra e inicia lacaída. a) Calcular el momento de inercia delcilindro con respecto al eje AA′ tangente a laperiferia de la base. b) Determinar la velocidadangular del cilindro en el instante en que sugeneratriz llega al plano horizontal.
Prob. 22.6
22.7.- Un disco de 10 cm de radio y 5 kg demasa está girando a razón de 1200 rpm. Alaplicarle la zapata del freno, se detiene en 6 s.El coeficiente de rozamiento entre la zapata yel disco vale 0.25. a) Calcular la fuerza conque debe aplicarse la zapata para conseguir elefecto anterior y el número de vueltas que dael disco hasta detenerse. b) Repetir el cálculode la fuerza del apartado anterior a partir deconsideraciones energéticas.
22.8.- Una rueda de fuegos artificiales de 1 mde radio y 4 kg de masa lleva sujetos en losextremos de un diámetro dos cohetes, de 3 kgcada uno, que ejercen fuerzas tangencialesiguales y opuestas. Sabiendo que cada cohetedesarrolla una fuerza de 10 N, y prescindiendode los rozamientos y de la pérdida de masa delos cohetes, calcular la velocidad angular de larueda al cabo de 10 s de iniciarse el movi-miento y el trabajo producido por la com-bustión de la pólvora durante ese tiempo.
22.9.- Una varilla homogénea de longitud L ymasa M puede girar sin rozamiento alrededor
de un eje vertical que pasa por su centro y quees perpendicular a la varilla. A lo largo de lavarilla pueden moverse dos esferillas idénticas,de masa m cada una, unidas entre sí por unhilo inextensible de longitud d < L. Ini-cialmente, la varilla está girando con unafrecuencia ν0 y las esferillas se encuentran enposiciones simétricas con respecto al eje derotación. En un instante determinado, el hilo serompe y las esferillas se desplazan hacia losextremos de la varilla, que dando detenidas enlos topes que existen en dichos extremos.a) Calcular la frecuencia de rotación final delsistema. b) ¿Se conservará la energía cinéticaen el proceso?
22.10.- En la figu-
Prob. 22.10
ra adjunta serepresenta unr e g u l a d o r d ecentrífuga en elque cada una delas varillas tieneuna longitud de10 cm y masadespreciable frentea las de las bolas,que pesan 500 gcada una. Elsistema está girando inicialmente con unavelocidad angular tal que el ángulo que formacada varilla con el eje de rotación es de 80°.a) Calcular la velocidad angular del sistema.b) Con el sistema siempre en rotación, seobliga al collar C a desplazarse hacia abajohasta que el ángulo anteriormente citado sereduce a 30°. ¿Cuál será la nueva velocidadangular? c) ¿Qué fuerza deberemos manteneraplicada en C para evitar que las bolas seseparen de nuevo? d) ¿Qué trabajo se harealizado al desplazar el collar?
22.11.- Un aro, un cilindro macizo y unaesfera bajan rodando sin resbalar por unmismo plano inclinado. Los tres cuerpospartieron simultáneamente del reposo desdeuna misma altura en el plano. a) Ordenarlos deacuerdo con el orden de llegada al pie delplano. b) ¿Intervienen las masas o los radiosde los cuerpos en el orden de llegada? c) ¿En-tonces, qué criterio se ha seguido para hacer laclasificación? Explíquese.
22.12.- Dadas dos esferas de la misma masa ydel mismo radio, pero una maciza y la otrahueca, describir detalladamente un experimentoque, sin dañar las esferas, nos permita averi-guar cual es la maciza y cual la hueca.
22.13.- Determinar la frecuencia de las peque-ñas oscilaciones del sistema que se muestra en

Problemas 675
la figura adjunta, suponiendo
Prob. 22.13
que la polea sea un discohomogéneo de masa M y ra-dio R y que la cuerda sealigera y no resbale por lagarganta de la polea.
22.14.- El cilindro macizo yhomogéneo que se muestraen la figura, de masa m yradio R, está suspendido deltecho mediante una cuerda.Uno de los extremos de lacuerda está unido directa-mente al techo; el otro loestá a un muelle de
Prob. 22.14
constante elástica k.Determinar la fre-cuencia de lasoscilaciones delsistema.
22.15.- Calcular elperiodo de laspequeñas oscilacio-nes del sistemarepresentado en lafigura adjunta. Lavarilla, de longitudL y masa m, puedegirar alrededor de un eje fijo y horizontal quepasa por su centro.
Prob. 22.15
22.16.- En el dispositi-
Prob. 22.16
vo que se muestra en lafigura, el collarín ligeropor el que pasa lavarilla y al que estánunidos dos muellesidénticos, permite queéstos permanezcanhorizontales. Determi-nar la frecuencia de laspequeñas oscilaciones de la varilla.
22.17.- En el dispositivo que se muestra en la
Prob. 22.17
figura, el muelle está unido al extremo supe-rior de la varilla y no está estirado cuandoθ=0°. a) Determinar la posición de equilibriodel sistema. b) Encontrar la frecuencia de las
pequeñas oscilacionesde la varilla respecto as u p o s i c i ó n d eequilibrio.
22.18.- En el péndulosimple representado enla figura, la varillarígida, de masa des-preciable, puede giraralrededor del eje hori-zontal fijo que seindica. Obtener la fre-cuencia natural de las
Prob. 22.18
pequeñas oscilacionesamortiguadas del pén-dulo.
22.19.- En el sistemaque se representa en lafigura, el rozamiento essuficiente para que elrodillo ruede sinresbalamiento. a) Esta-blecer la ec. diferencialdel movimiento del
centro de masa de rodillo. b) Demostrar que
Prob. 22.19
este sistema es equivalente, desde el punto devista analítico, al descrito en la Lec. 14, conm=3M.
22.20.- En el dispositivo de la figura, el
Prob. 22.20
cilindro de 50 kg de masa y 30 cm de radiorueda sobre la superficie horizontal rugosa. Laconstante de amortiguamiento del amortigua-dor es 75 kg/s y la constante elástica delmuelle vale 300 N/m. A la base móvil se leimpone una oscilación armónica simple conuna amplitud de 1 cm. a) Determinar lasfrecuencias de resonancia en la energía y en la

676 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.
amplitud y la amplitud de las oscilaciones dedesplazamiento del centro del rodillo en esasresonancias. b) Calcular la potencia mediatransferida al rodillo en las resonancias deenergía y de amplitud.
22.21.- a) Una varilla, de longitud l y masa m,
Prob. 22.21
permanece en reposo sobre una superficiesemicilíndrica, como se muestra en la figura.Determinar la frecuencia de las pequeñasoscilaciones libres de la varilla cuando empu-jamos ligeramente hacia abajo uno de susextremos. b) Ídem si se tratase de un tablón deespesor h.
22.22.- Una pequeña esfera de radio r perma-nece en equilibrio inestable en la cima de unagran esfera fija de radio R. Desplazamosligeramente la esferilla de su posición de equi-librio, de modo que comience a rodar (sinresbalar) sobre la esfera grande. Determinar laposición en que la esferilla se despega de laesfera grande y la velocidad que lleva en eseinstante.
22.23.- Una bola maciza, de 2 cm de radio,
Prob. 22.23
desciende rodando sin resbalar por una pistaque forma un rizo de 20 cm de radio, como semuestra en la figura. Si la bola parte delreposo de un punto situado a una altura hsobre el fondo del rizo, calcular el valormínimo de h que permite a la bola "rizar elrizo" sin despegarse de la pista.
22.24.- Una bolita de radio r se encuentra enel interior de una oquedad hemiesférica deradio R. a) Demostrar que si desplazamos labolita de su posición de equilibrio en el fondode la oquedad y después la abandonamos, lasoscilaciones de la bolita no serán armónicassimples a menos que la amplitud de dichasoscilaciones sea muy pequeña. b) En este
último caso, determinar el periodo de lasoscilaciones y la longitud del péndulo simpleequivalente.
22.25.- Una bolita, de
Prob. 22.25
radio r, rueda por uncarril situado en unplano vertical, de radiointerior R>r. a) ¿Cuáldeberá ser el valormínimo de v0 a fin deque la bolita completesu trayectoria circularsin despegarse delcarril? b) Sea vm el valor mínimo calculadoanteriormente; y supóngase ahora que v0 =0.387 vm. Bajo estas condiciones, determinar laposición angular θ del punto P en el que labolita se despega del carril, así como suvelocidad en ese instante.
22.26.- Un cubo homogéneo está apoyadosobre una de sus aristas en contacto con unplano horizontal, de modo que inicialmente seencuentra en equilibrio inestable. Los despla-zamos ligeramente de esa posición para quecomience a caer. Calcular su velocidad angularcuando una de sus caras choca con el planohorizontal: a) suponiendo que la arista noresbale sobre el plano y b) suponiendo que elplano sea perfectamente liso.
22.27.- Un rodillo
Prob. 22.27
macizo, de sec-ción circular, deradio r y masa m,descansa sobre elborde horizontalde un escalón yempieza a rodarhacia afuera, sinr e s b a l a r , c o nvelocidad inicialdespreciable. Calcular el ángulo que girará elrodillo antes de que pierda contacto con el bor-de del escalón, así como su velocidad angularen ese instante.
22.28.- Dos discos idénticos, de 200 g de masa
Prob. 22.28
cada uno de ellos y de 10 cm de radio, están

Problemas 677
unidos por un eje cilíndrico y ligero de 2 cmde radio. El sistema rueda sin deslizar por unplano inclinado (30°) angosto de forma que losdiscos cuelgan a ambos lados del plano. Elsistema parte del reposo y recorre una longi-tud de 1 m sobre el plano antes de que los dis-cos tomen contacto con el plano horizontal;entonces se produce un aumento notable en lavelocidad de traslación del sistema. a) Calcularla velocidad del sistema cuando está a puntode alcanzarse el pie del plano. b) Calcular lavelocidad que finalmente adquiere el sistemarodando sobre el plano horizontal. c) ¿Se con-serva la energía cinética en el tránsito delplano inclinado al horizontal?
22.29.- Un rodillo macizo, de masa m y radio
Prob. 22.29
r, desciende rodando (sin resbalar) por la carainclinada de un prisma triangular móvil, demasa M e inclinación θ, como se ilustra en lafigura. a) Determinar las aceleraciones (abso-lutas) del rodillo y del prisma. b) Si el rodillopartió del reposo en la parte superior del pris-ma, estando también éste inicialmente en repo-so, ¿cuál será la velocidad final del prisma?
22.30.- Un cilindro
Prob. 22.30
macizo y homo-géneo, de masa my radio r, rueda sindeslizar por elinterior de otrocilindro hueco, demasa M y radio R,que puede giraralrededor de un ejefijo horizontal (O)que coincide consu eje de simetría. En el instante inicial, seabandona el sistema (partiendo del reposo) enla posición que se indica en la figura. a) De-terminar las velocidades angulares de cada unode los dos cilindros en el instante en que elcilindro interior pasa por su posición más baja.b) Determinar la velocidad de traslación delcilindro interior en dicho instante.

678 Lec. 22.- Trabajo y energía en el movimiento general del sólido rígido.

23.- Ecuaciones de Euler.
§23.1. Ecuaciones del movimiento en un referencial solidario (679); §23.2. Ecuaciones deEuler (683); §23.3. Movimiento libre del sólido rígido (685); §23.4. Peonza esférica (686);§23.5. Peonza simétrica (686); §23.6. Precesión del eje de rotación de la Tierra (689);§23.7. Estabilidad de la rotación (691); Problemas (693)
El movimiento del sólido rígido cuando faltan los apoyos que fijan la posicióndel eje de rotación es extraordinariamente complicado, como ya hemos tenido ocasiónde comprobar en el estudio elemental que hemos hecho en la Lección 21 sobre elmovimiento del trompo y del giroscopio. Nuestro propósito en esta lección esestablecer las ecuaciones generales del movimiento del sólido rígido, esto es, lasllamadas Ecuaciones de Euler, y analizar algunos problemas sencillos referentes almovimiento del sólido rígido y a la estabilidad de su rotación.
§23.1. Ecuaciones del movimiento en un referencial solidario.- Paraencontrar las ecuaciones del movimiento del sólido rígido, partiremos de la relaciónfundamental entre el momento y el momento angular, esto es
[23.1]dLdt F
M
donde el subíndice F nos recuerda que esta relación sólo es válida si tanto L comoM están referidos a un mismo punto que está fijo en un cierto referencial inercial oque es el centro de masa del sólido.
Cuando expresamos los coeficientes de inercia Iμν en un referencial fijo, resultanser función del tiempo, ya que la posición y orientación del sólido cambia en eltranscurso del movimiento con respecto a los ejes coordenados de dicho referencial.Por ello resulta conveniente expresar la matriz de inercia en un sistema de ejescoordenados en el que los coeficientes de inercia Iμν permanezcan constantes en eltranscurso del movimiento; i.e., la distribución de masa del sólido deberá permanecerinvariable con respecto a tal sistema de ejes coordenados.
Obviamente, estos requisitos los cumple cualquier referencial definido por unpunto de cuerpo y un sistema de ejes coordenados ligados al cuerpo, i.e., un
Manuel R. Ortega Girón 679
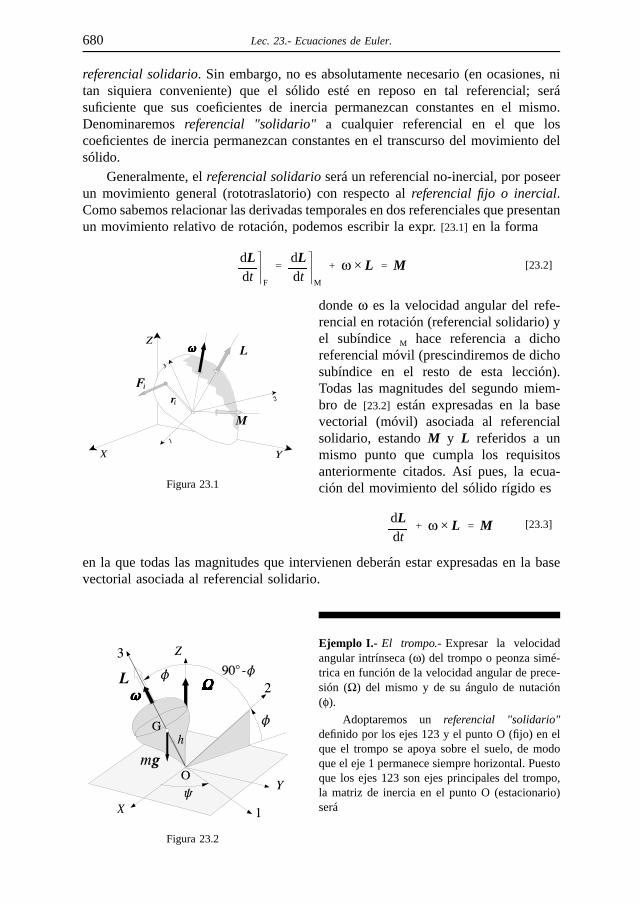
680 Lec. 23.- Ecuaciones de Euler.
referencial solidario. Sin embargo, no es absolutamente necesario (en ocasiones, nitan siquiera conveniente) que el sólido esté en reposo en tal referencial; serásuficiente que sus coeficientes de inercia permanezcan constantes en el mismo.Denominaremos referencial "solidario" a cualquier referencial en el que loscoeficientes de inercia permanezcan constantes en el transcurso del movimiento delsólido.
Generalmente, el referencial solidario será un referencial no-inercial, por poseerun movimiento general (rototraslatorio) con respecto al referencial fijo o inercial.Como sabemos relacionar las derivadas temporales en dos referenciales que presentanun movimiento relativo de rotación, podemos escribir la expr. [23.1] en la forma
[23.2]dLdt F
dLdt M
ω × L M
donde ω es la velocidad angular del refe-
Figura 23.1
rencial en rotación (referencial solidario) yel subíndice M hace referencia a dichoreferencial móvil (prescindiremos de dichosubíndice en el resto de esta lección).Todas las magnitudes del segundo miem-bro de [23.2] están expresadas en la basevectorial (móvil) asociada al referencialsolidario, estando M y L referidos a unmismo punto que cumpla los requisitosanteriormente citados. Así pues, la ecua-ción del movimiento del sólido rígido es
[23.3]dLdt
ω × L M
en la que todas las magnitudes que intervienen deberán estar expresadas en la basevectorial asociada al referencial solidario.
Figura 23.2
Ejemplo I.- El trompo.- Expresar la velocidadangular intrínseca (ω) del trompo o peonza simé-trica en función de la velocidad angular de prece-sión (Ω) del mismo y de su ángulo de nutación(φ).
Adoptaremos un referencial "solidario"definido por los ejes 123 y el punto O (fijo) en elque el trompo se apoya sobre el suelo, de modoque el eje 1 permanece siempre horizontal. Puestoque los ejes 123 son ejes principales del trompo,la matriz de inercia en el punto O (estacionario)será

§23.1.- Ecuaciones del movimiento en un referencial solidario. 681
[i]II
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1 0 0
0 I2 0
0 0 I3 123
con I1 = I2 ( = I12).
Puesto que los ejes coordenados 123 no participan de la rotación intrínseca ω del trompo, lavelocidad angular del referencial "solidario" en el referencial inercial (XYZ) es Ω, en tanto que lavelocidad angular del trompo es ω+Ω; i.e.,
[ii]Ω
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
Ω senφΩ cosφ 123
ω Ω
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
Ω senφω Ω cosφ 123
de modo que el momento angular del trompo con respecto al punto O será
[iii]L II ( ω Ω )
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
I12 Ω senφ
I3 ( ω Ω cosφ )123
Aplicamos la expr. [23.3]
[iv]
M dLdt
Ω × L
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
Ω senφΩ cosφ 123
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
I12Ω senφ
I3 ( ω Ω cosφ )123
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
[ I3Ωω (I3 I12)Ω2cosφ] senφ
0
0 123
ya que dL/dt=0 (en el referencial 123).
Por otra parte, podemos calcular el momento dinámico que actúa sobre el trompo a partir delpar de fuerza (mg,N) que interviene:
[v]M OG × mg
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
h 123
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
mg senφmg cosφ 123
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
mgh senφ0
0 123
de modo que igualando [iv] y [v]
[vi]I3Ωω (I3 I12)Ω2 cosφ mgh
o sea [vii]ω mghI3Ω
I12 I3
I3
Ω cosφ
que es la expresión pedida.
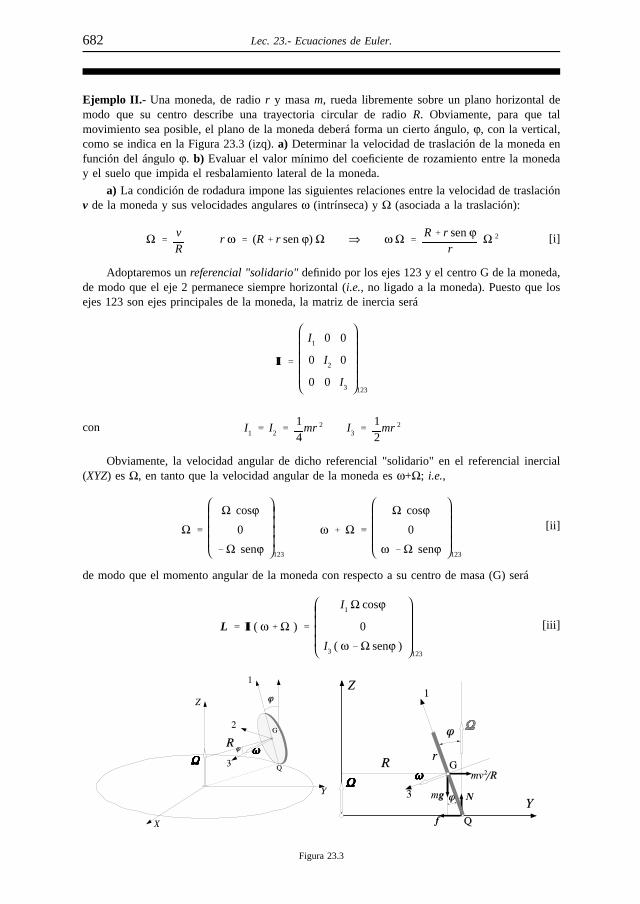
682 Lec. 23.- Ecuaciones de Euler.
Ejemplo II.- Una moneda, de radio r y masa m, rueda libremente sobre un plano horizontal demodo que su centro describe una trayectoria circular de radio R. Obviamente, para que talmovimiento sea posible, el plano de la moneda deberá forma un cierto ángulo, ϕ, con la vertical,como se indica en la Figura 23.3 (izq). a) Determinar la velocidad de traslación de la moneda enfunción del ángulo ϕ. b) Evaluar el valor mínimo del coeficiente de rozamiento entre la moneday el suelo que impida el resbalamiento lateral de la moneda.
a) La condición de rodadura impone las siguientes relaciones entre la velocidad de traslación
Figura 23.3
v de la moneda y sus velocidades angulares ω (intrínseca) y Ω (asociada a la traslación):
[i]Ω vR
r ω (R r sen ϕ) Ω ⇒ ω Ω R r sen ϕr
Ω 2
Adoptaremos un referencial "solidario" definido por los ejes 123 y el centro G de la moneda,de modo que el eje 2 permanece siempre horizontal (i.e., no ligado a la moneda). Puesto que losejes 123 son ejes principales de la moneda, la matriz de inercia será
II
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1 0 0
0 I2 0
0 0 I3 123
con I1 I2
14
mr 2 I3
12
mr 2
Obviamente, la velocidad angular de dicho referencial "solidario" en el referencial inercial(XYZ) es Ω, en tanto que la velocidad angular de la moneda es ω+Ω; i.e.,
[ii]Ω
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ω cosϕ0
Ω senϕ 123
ω Ω
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ω cosϕ0
ω Ω senϕ 123
de modo que el momento angular de la moneda con respecto a su centro de masa (G) será
[iii]L II ( ω Ω )
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
I1 Ω cosϕ
0
I3 ( ω Ω senϕ )123

§23.1.- Ecuaciones del movimiento en un referencial solidario. 683
Aplicamos la expr. [23.3]
[iv]
M dLdt
Ω × L
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ω cosϕ0
Ω senϕ 123
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
I1 Ω cosϕ
0
I3 (ω Ω senϕ )123
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
I1Ω2senϕ cosϕ I3Ω cosϕ (ω Ω senϕ )
0 123
ya que dL/dt =0 (en el referencial 123). En consecuencia, el momento dinámico con respecto a Gtan solo tiene componente en la dirección del eje 2; i.e.,
[v]M2 (I3 I1 ) Ω 2senϕ cosϕ I3 Ω ω cosϕ
Pero, por otra parte, podemos calcular dicho momento dinámico a partir de los dos pares defuerzas que intervienen, como se muestran en la Figura 23.3 (dcha); i.e., (mg,N) y (f,Fcf):
[vi]M2 mg r senϕ mv 2
Rr cosϕ
de modo que igualando [v] con [vi] y sustituyendo las expresiones de Ω y de ωΩ dadas por [i],después de algunas operaciones, se obtiene
[vii]v R r mg tgϕmr 2R I3R I2r senϕ
⇒ v 2 R g tgϕ3R r senϕ
que es la velocidad pedida. Obsérvese que para ϕ=0 deberá ser v=0 (i.e., no es posible elmovimiento).
b) Para que la moneda no resbale lateralmente deberá ser
[viii]f μ N μ mg ≥ mv 2
R⇒ μ ≥ v 2
gR
§23.2. Ecuaciones de Euler.- Si escogemos los ejes ligados al cuerpo enrotación coincidiendo con los ejes principales de inercia (123) del cuerpo, será
[23.4]L
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1ω1
I2ω2
I3ω3 123
⇒ dLdt
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1ω1
I2ω2
I3ω3 123
[23.5]ω × L
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
ω1
ω2
ω3 123
×
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1ω1
I2ω2
I3ω3 123
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
(I3 I2)ω2ω3
(I1 I3)ω1ω3
(I2 I1)ω1ω2 123

684 Lec. 23.- Ecuaciones de Euler.
de modo que la ecuación vectorial [23.3] equivale a tres ecuaciones escalares quepodemos escribir en la forma
[23.6]
⎧⎪⎨⎪⎩
I1ω1 (I2 I3)ω2ω3 M1
I2ω2 (I3 I1)ω1ω3 M2
I3ω3 (I1 I2)ω1ω2 M3
que son las Ecuaciones de EULER1 para el movimiento del sólido rígido en un campode fuerzas.
Observemos que el movimiento del
Figura 23.4
sólido rígido depende de la estructura delcuerpo a través, tan sólo, de tres números(I1, I2, I3), que son los momentos principa-les de inercia. Entonces, dos cuerposcualesquiera que tengan los mismos mo-mentos principales de inercia se moverándel mismo modo, independientemente deque presenten una estructura diferente. (Porsupuesto que no se tendrán en cuenta lasfuerzas de rozamiento ya que estas
dependerán de la forma del cuerpo). La forma geométrica más simple que puedepresentar un cuerpo que tenga los tres momentos principales de inercia distintos es,obviamente, la de un elipsoide homogéneo. Por lo tanto, el movimiento de un sólidorígido cualquiera quedará representado por el de su elipsoide equivalente, tambiénllamado elipsoide de inercia (Figura 23.4). El estudio del movimiento del sólido rígidobajo este punto de vista fue ideado por POINSOT en 1834. La construcción de Poinsotes objeto de estudio en cursos más avanzados de Mecánica.
Figura 23.5
Ejemplo III.- Resolver de nuevo el problemadel Ejemplo II aplicando directamente lasecuaciones de Euler en un referencial solidario1′2′3′.
Adoptamos el referencial solidario defini-do por los ejes 1′2′3′ y el centro G de lamoneda (Figura 23.5), de modo que ahora losejes 1′ y 2′ son arrastrados por la rotaciónintrínseca de la moneda alrededor del eje 3′.La velocidad angular del referencial 1′2′3′ enel referencial inercial (XYZ) es ω+Ω, de modoque
1 Leonhard EULER (1707-1783); matemático y físico suizo. Sus actividades abarcaron lasdisciplinas afines como la Astronomía y la Física, así como las Matemáticas. Fundó el Cálculo deVariaciones e imprimió nuevos rumbos a la Mecánica Analítica y a la Mecánica Celeste.

§23.2.- Ecuaciones de Euler. 685
ω Ω
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
cosθ senθ 0
senθ cosθ 0
0 0 1
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ω cosϕ0
ω Ω senϕ 123
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ω cosθ cosϕΩ senθ cosϕω Ω senϕ 1′2′3′
de donde se sigue ddt
(ω Ω )
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
Ωω senθ cosϕΩω cosθ cosϕ
0 1′2′3′
Apliquemos ahora las ecuaciones de Euler [23.6], teniendo en cuenta las componentes de ω+Ωy de ω+Ω dadas por las dos expresiones anteriores;
⎧⎪⎪⎨⎪⎪⎩
M1′ I1Ωω senθ cosϕ (I2 I3)( Ω senθ cosϕ ) (ω Ω senϕ)
M2′ I2Ωω cosθ cosϕ (I3 I1)( Ω cosθ cosϕ ) (ω Ω senϕ)
M3′ 0
o sea
⎧⎪⎪⎨⎪⎪⎩
M1′ [ (I3 I2) Ω 2 senϕ cosϕ I3 Ωω cosϕ ] senθ
M2′ [ (I3 I1) Ω 2 senϕ cosϕ I3 Ωω cosϕ ] cosθ
M3′ 0
de modo que el momento dinámico tiene la dirección del eje 2 (sin prima) y su módulo es
M (I3 I1 ) Ω 2senϕ cosϕ I3 Ω ω cosϕ
que es el mismo resultado que encontrábamos en [v] del Ejemplo I, por lo que el problema seconcluye en la forma que ya conocemos ...
§23.3. Movimiento libre del sólido rígido.- Uno de los problemas a los quepodemos aplicar las ecuaciones de Euler es el referente al movimiento de un sólidorígido sobre el que no actúan fuerzas ni momentos. El centro de masa de dicho sólidose hallará en reposo o en movimiento uniforme en un referencial inercial; pero no sepierde generalidad si suponemos que se encuentra en reposo y lo tomaremos comoorigen tanto del referencial inercial como del sistema de ejes ligado al cuerpo.
Puesto que el momento resultante es nulo, las ec. de Euler permiten escribir:
[23.7]
⎧⎪⎪⎨⎪⎪⎩
I1ω1 (I2 I3)ω2ω3
I2ω2 (I3 I1)ω1ω3
I3ω3 (I1 I2)ω1ω2
Estas mismas ecuaciones describen también el movimiento del sólido rígido con unpunto fijo si sobre él no actúa un momento resultante con respecto a dicho punto.

686 Lec. 23.- Ecuaciones de Euler.
§23.4. Peonza esférica.- En el caso de una peonza esférica (Figura 23.6) es, I1
Figura 23.6
= I2 = I3 = I, de modo que las ecuaciones [23.7] sereducen a
[23.8]I1ω1 0 I2ω2 0 I3ω3 0
y, por consiguiente, ω = cte, permaneciendo el eje derotación fijo en el espacio y coincidiendo la direccióndel vector velocidad angular ω con la del momentoangular L. La energía cinética de rotación tambiénpermanece constante, tomando el valor
[23.9]Ek
12
I (ω21 ω2
2 ω23 ) 1
2Iω2 L 2
2I
§23.5. Peonza simétrica.- Tomando como eje principal 3 el eje de simetría delcuerpo (Figura 23.7), de modo que I1 = I2 ≠ I3, las ecuaciones [23.7] se reducen a
Figura 23.7
[23.10]
⎧⎪⎨⎪⎩
I12ω1 (I12 I3)ω2ω3
I12ω2 (I3 I12)ω1ω3
I3ω3 0
donde I12 sustituye2 a I1 e I2. Consideraremos el casogeneral en el que la velocidad angular no estádirigida a lo largo de un eje principal del sólido,puesto que en esas circunstancias el movimiento seríatrivial.
De la ecuación [23.10c] se sigue que , loω3 0que implica que
[23.11]ω3 cte
de modo que la componente de la velocidad angular sobre el eje 3 es constante ypuede considerársela como una condición inicial del problema.
Las dos primeras ecuaciones de [23.10] pueden escribirse en la forma
[23.12]ω1
⎛⎜⎜⎝
⎞⎟⎟⎠
I3 I12
I12
ω3 ω2 ω2
⎛⎜⎜⎝
⎞⎟⎟⎠
I3 I12
I12
ω3 ω1
y puesto que los términos encerrados en los paréntesis son iguales y constantes, losdesignaremos por
2 No existe posibilidad de confusión con la notación que empleamos, en la que un doblesubíndice debería representar un producto de inercia, ya que en el referencial de los ejes principalesde inercia aquellos son siempre nulos.

§23.5.- Peonza simétrica. 687
[23.13]ΩI3 I12
I12
ω3
que tiene las dimensiones de una velocidad angular. Con esta notación, lasecuaciones [23.12] pueden escribirse en la forma
[23.14]ω1 Ω ω2 ω2 Ω ω1
y constituyen un par de ecuaciones diferenciales acopladas. Para obtener las
Figura 23.8
soluciones de dicho sistema de ec. dif. derivamos [23.14b] respecto al tiempo
[23.15]ω2 Ω ω1
y sustituimos en [23.15] el valor de ω1 dado por [23.14a]
[23.16]ω2 Ω2 ω2
que es una ec. dif. de segundo orden cuyasolución es obvia; i.e.,
[23.17]ω2 A sen Ωt
donde A es una cierta constante. Sustituyendoahora [23.17] en [23.14a] obtenemos
[23.18]ω1 Ω A sen Ωt
cuya solución es
[23.19]ω1 A cos Ωt
de modo que, en resumen, tenemos
[23.20]ω1 A cos Ωt ω2 A sen Ωt ω3 cte
Las soluciones [23.20] ponen de manifiesto que el vector ω = ω1e1 + ω2e2 + ω3e3,tiene módulo constante
[23.21]ω2 ω21 ω2
2 ω23 A 2 ω2
3 cte
y que gira uniformemente, alrededor del eje 3 del cuerpo, con una frecuencia angularΩ, puesto que las primeras ecuaciones de [23.20] son las ecuaciones paramétricas deuna circunferencia. Esta situación está descrita en la Figura 23.8, en la que se muestracomo el extremo del vector ω (que tiene módulo constante) describe unacircunferencia de radio A en torno al eje 3 (eje de simetría de la peonza simétrica)en tanto que se mantiene constante su proyección sobre dicho eje.
En definitiva, la velocidad angular ω, o lo que es lo mismo, el eje instantáneode rotación, presenta un movimiento de precesión alrededor del eje 3, con unavelocidad angular constante Ω. La ecuación [23.13] pone de manifiesto que cuantomás próximos son los valores de I12 e I3, tanto menor será la velocidad angular de

688 Lec. 23.- Ecuaciones de Euler.
precesión (Ω) en relación con la de rotación (ω). Recuérdese que la precesión asídescrita es relativa a los ejes del cuerpo, los que a su vez giran en el espacio con unavelocidad angular mayor ω. Para un observador fijo en el sistema de coordenadasligado al cuerpo, ω traza un cono que tiene como eje el de simetría del cuerpo; estecono se denomina cono del cuerpo.
Puesto que estamos considerando el movimiento libre del sólido rígido, el vector
Figura 23.9 Figura 23.10
momento angular L es estacionario en el espacio, esto es, constante en un referencialfijo o inercial. Además, otra constante del movimiento lo será la energía cinética; ypuesto que el centro de masa del cuerpo permanece fijo, será constante la energíacinética de rotación; esto es,
[23.22]Ek
12
ω L cte
de modo que, al ser L = cte y ω = cte, ω debe moverse, en el referencial fijo, detal forma que su proyección sobre L sea constante. Por lo tanto, ω precesa alrededorde L formando un ángulo constante con la dirección (constante en el espacio) delmomento angular L. Lo anteriormente expuesto equivale a decir que el ejeinstantáneo de rotación genera un cono que tiene como eje la dirección constante enel espacio del momento angular L; este cono se denomina cono del espacio.
La situación queda descrita como se ilustra en la Figura 23.9. El cono del cuerporueda sobre el cono del espacio, de modo que ω (que tiene en cada instante ladirección de la generatriz común) precesa alrededor de L (eje z, por convenio) en elreferencial fijo, y también precesa alrededor del eje de simetría del cuerpo (eje 3, porconvenio) en el referencial ligado al cuerpo.
Podemos determinar fácilmente los semiángulos de abertura de ambos conos. Envirtud de la ec. [23.22], el ángulo α que determinan las direcciones del momentoangular L y del eje instantáneo de rotación ω es constante y, por ser la energíacinética esencialmente positiva, dicho ángulo es siempre agudo. Esto es, elsemiángulo de abertura del cono del espacio es siempre menor de 90° y viene dadopor
[23.23]cos α ω LωL
2Ek
ωL

§23.5.- Peonza simétrica. 689
Por otra parte, el semiángulo de abertura β del cono del cuerpo, esto es, elángulo determinado por el eje instantáneo de rotación (ω) y el eje de simetría delcuerpo (eje 3) viene dado por
[23.24]cos βω e3
ωω3
ωω3
A 2 ω23
⇒ tgβ Aω3
Las constantes A (amplitud de precesión) y ω3, cuyos valores dependen de lascondiciones iniciales, pueden calcularse a partir de las constantes del movimiento másusuales; es decir, la energía cinética y el momento angular. Teniendo en cuenta larelación [23.22] y que
[23.25]L
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
I1ω1
I2ω2
I3ω3 123
se sigue [23.26]Ek
12
I12 A 2 12
I3 ω23 L 2 I 2
12 A 2 I 23 ω2
3
y de estas expresiones se pueden obtener A y ω3 en función de Ek y L; i.e.,
[23.27]A 22I3 Ek L 2
I12 (I3 I12)ω2
3
L 2 2I12 Ek
I3 (I3 I12)
como el lector comprobará fácilmente.Resulta interesante calcular el ángulo γ determinado por los ejes del cono del
cuerpo y del cono del espacio; es decir, por las direcciones de los vectores L y e3.Dicho ángulo viene dado por
[23.28]cos γL e3
L
I3ω3
I 212A 2 I 2
3 ω23
⇒ tgγI12 A
I3 ω3
y combinando las expresiones [23.24] y [23.28] resulta
[23.29]tgβtgγ
A/ω3
I12A/I3ω3
I3
I12
de modo que si I3<I12 (esferoide prolato, Figura 23.7), será β < γ y la situación será larepresentada en la Figura 23.9. En cambio, si I3>I12 (esferoide oblato, i.e., achatado porlos polos, Figura 23.11), será β > γ, de modo que la situación se describegeométricamente por la Figura 23.10; esto es, el cono del espacio es interior al cono delcuerpo.
§23.6. Precesión del eje de rotación de la Tierra.- Puesto que la Tierra noes exactamente esférica cabe esperar que su eje de rotación presente un movimiento
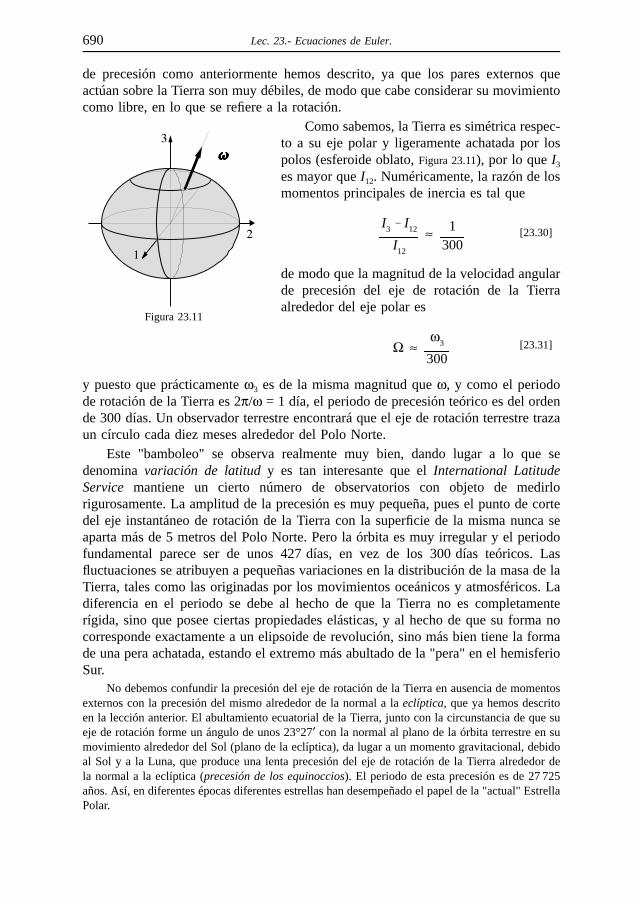
690 Lec. 23.- Ecuaciones de Euler.
de precesión como anteriormente hemos descrito, ya que los pares externos queactúan sobre la Tierra son muy débiles, de modo que cabe considerar su movimientocomo libre, en lo que se refiere a la rotación.
Como sabemos, la Tierra es simétrica respec-
Figura 23.11
to a su eje polar y ligeramente achatada por lospolos (esferoide oblato, Figura 23.11), por lo que I3
es mayor que I12. Numéricamente, la razón de losmomentos principales de inercia es tal que
[23.30]I3 I12
I12
≈ 1300
de modo que la magnitud de la velocidad angularde precesión del eje de rotación de la Tierraalrededor del eje polar es
[23.31]Ω ≈ω3
300
y puesto que prácticamente ω3 es de la misma magnitud que ω, y como el periodode rotación de la Tierra es 2π/ω = 1 día, el periodo de precesión teórico es del ordende 300 días. Un observador terrestre encontrará que el eje de rotación terrestre trazaun círculo cada diez meses alrededor del Polo Norte.
Este "bamboleo" se observa realmente muy bien, dando lugar a lo que sedenomina variación de latitud y es tan interesante que el International LatitudeService mantiene un cierto número de observatorios con objeto de medirlorigurosamente. La amplitud de la precesión es muy pequeña, pues el punto de cortedel eje instantáneo de rotación de la Tierra con la superficie de la misma nunca seaparta más de 5 metros del Polo Norte. Pero la órbita es muy irregular y el periodofundamental parece ser de unos 427 días, en vez de los 300 días teóricos. Lasfluctuaciones se atribuyen a pequeñas variaciones en la distribución de la masa de laTierra, tales como las originadas por los movimientos oceánicos y atmosféricos. Ladiferencia en el periodo se debe al hecho de que la Tierra no es completamenterígida, sino que posee ciertas propiedades elásticas, y al hecho de que su forma nocorresponde exactamente a un elipsoide de revolución, sino más bien tiene la formade una pera achatada, estando el extremo más abultado de la "pera" en el hemisferioSur.
No debemos confundir la precesión del eje de rotación de la Tierra en ausencia de momentosexternos con la precesión del mismo alrededor de la normal a la eclíptica, que ya hemos descritoen la lección anterior. El abultamiento ecuatorial de la Tierra, junto con la circunstancia de que sueje de rotación forme un ángulo de unos 23°27′ con la normal al plano de la órbita terrestre en sumovimiento alrededor del Sol (plano de la eclíptica), da lugar a un momento gravitacional, debidoal Sol y a la Luna, que produce una lenta precesión del eje de rotación de la Tierra alrededor dela normal a la eclíptica (precesión de los equinoccios). El periodo de esta precesión es de 27 725años. Así, en diferentes épocas diferentes estrellas han desempeñado el papel de la "actual" EstrellaPolar.

§23.7.- Estabilidad de la rotación. 691
§23.7. Estabilidad de la rotación.- Cuando un sólido rígido utiliza uno de susejes principales como eje de rotación, dicho eje no muestra tendencia alguna aabandonar su posición y no ejerce reacciones sobre sus apoyos. Por esta razón losejes principales de un sólido reciben también el nombre de "ejes libres". En esteartículo vamos a considerar la rotación libre del sólido rígido, esto es, sin laintervención de momentos externos, alrededor de cada uno de sus ejes principales yvamos a estudiar las condiciones bajo las cuales dicha rotación es estable,entendiendo por estabilidad que el movimiento recupera su estado inicial, o realizaoscilaciones respecto a dicho estado, tras someter el cuerpo a una pequeñaperturbación.
Escogeremos para nuestra discusión un sólido rígido cualquiera, de forma que engeneral sus tres momentos principales de inercia sean distintos y los etiquetaremosde modo que I1 < I2 < I3. Naturalmente, tomaremos como sistema de ejes ligado alcuerpo el sistema de ejes principales, y, para empezar, supondremos que el cuerpoestá girando alrededor del tercer eje principal (Figura 23.12), de modo que
Figura 23.12
[23.32]ω3 0 0 ω3 123
Si en estas condiciones aplicamos unapequeña perturbación, podremos expresar elvector velocidad angular como
[23.33]ω λ μ ω3 123
donde λ y μ serán cantidades muy pequeñas, demodo que el producto λμ podrá ser despreciablefrente a otros términos que aparecerán ennuestra discusión.
Las ecuaciones del movimiento del sólidorígido (ec. de Euler), en estas condiciones y enla ausencia de momentos externos, son las ec. [23.7], de modo que
[23.34]
⎧⎪⎪⎨⎪⎪⎩
I1λ (I2 I3)μω3
I2μ (I3 I1)λω3
I3ω3 (I1 I2)λμ
y puesto que λμ ≈ 0, la tercera ecuación de [23.34] implica que ω3 = 0, o sea, ω3 =cte. Las otras dos ecuaciones nos conducen a
[23.35]λ⎛⎜⎜⎝
⎞⎟⎟⎠
I2 I3
I1
ω3 μ μ⎛⎜⎜⎝
⎞⎟⎟⎠
I3 I1
I2
ω3 λ
donde las cantidades entre paréntesis son constantes. Estas dos ecuaciones constituyenun par de ecuaciones diferenciales acopladas. Para obtener las soluciones de este

692 Lec. 23.- Ecuaciones de Euler.
sistema de ec. dif. derivaremos respecto al tiempo ambas ecuaciones, sustituiremoslas expresiones de λ y μ dadas por [23.35] en el resultado y definiremos
[23.36]Ω3 ω3
(I3 I1) (I3 I2)
I1 I2
con lo que finalmente obtenemos dos ec. dif. desacopladas:
[23.37]λ Ω23 λ 0 μ Ω2
3 μ 0
cuyas soluciones son
[23.38]
⎧⎪⎨⎪⎩
Si Ω23>0, será λ(t) A cos Ω3t μ(t) B sen Ω3t
Si Ω23<0, será λ(t) C exp(Ω3t) μ(t) D exp(Ω3t)
significando el subíndice 3 que estamos considerando las soluciones para λ y paraμ cuando la rotación tiene lugar alrededor del tercer eje principal.
Por hipótesis es I1 < I2 < I3, de modo que Ω32>0 y las soluciones para λ(t) y μ(t)
representan movimientos oscilatorios armónicos de la misma frecuencia, encuadratura y en direcciones perpendiculares. La conclusión es que la perturbaciónintroducida al forzar pequeñas componentes para ω en las direcciones de los ejesprincipales primero y segundo no se incrementa con el tiempo, sino que se produceuna precesión del eje de rotación (i.e., del vector ω) alrededor del tercer eje principal;de este modo, el eje de rotación permanece en la proximidad del tercer eje principal.En consecuencia, la rotación alrededor del tercer eje principal es estable.
Si considerásemos rotaciones del sólido alrededor de los otros dos ejesprincipales, podríamos obtener las expresiones de Ω2 y Ω3 por permutación desubíndices en la expresión [23.36], esto es,
[23.39]Ω1 ω1
(I1 I2) (I1 I3)
I2 I3
Ω2 ω2
(I2 I1) (I2 I3)
I1 I3
y puesto que I1 < I2 < I3 tenemos que Ω1 y Ω3 son reales, pero Ω2 es imaginario.Esto significa que cuando la rotación tiene lugar alrededor de los ejes principales
primero y tercero la perturbación produce precesiones alrededor del eje correspon-diente y la rotación alrededor de esos ejes es estable. En cambio, cuando la rotacióntiene lugar alrededor del segundo eje principal, como Ω2
2 es negativo, resulta que laperturbación se incrementa con el tiempo sin ningún límite y la rotación es inestable.
En conclusión:
La rotación alrededor de los ejes principales de inercia a los que correspondeel menor y el mayor momento de inercia es estable, en tanto que la rotaciónalrededor del eje principal al que corresponde un momento de inerciaintermedio es inestable.
Este efecto puede comprobarse fácilmente si arrojamos al aire, por ejemplo, una cartulina rectangularo un libro. Así, si lo arrojamos comunicándole una cierta rotación alrededor de uno de sus ejes principales,

§23.7.- Estabilidad de la rotación. 693
el movimiento será inestable para una rotación alrededor del eje principal de momento de inerciaintermedio y estable para los otros dos ejes principales.
En el caso de que dos momentos de inercia sean iguales (peonza simétrica),como por ejemplo I2 = I3, entonces el coeficiente de μ en la ecuación [23.35a] se anula,de modo que λ = 0, lo que significa que λ = cte, y la ec. [23.35b] puede integrarsepara obtener
[23.40]μ(t) A Bt
resultando que habrá inestabilidad para el tercer eje principal, además de para elsegundo. Sólo habrá estabilidad para el primer eje principal (eje de simetría derevolución), independientemente de que I1 sea mayor o menor que I2 = I3.
En el caso de que los tres momentos de inercia sean iguales (peonza esférica),esto es I1 = I2 = I3, tanto λ como μ en las ecuaciones [23.35] permanecen constantescon el tiempo, lo que significa que, cualquiera que sea el eje de rotación que pase porel centro de masa del cuerpo, la rotación será estable. Cabía esperar este resultado,pues para la peonza esférica el momento angular siempre está situado sobre cualquiereje de rotación que pase por el centro de masa del sólido.
Problemas
23.1.- Movimiento plano. Se denominamovimiento plano del sólido rígido al que tienelugar de modo que cada punto del sólido semueve en un plano paralelo a un plano fijodeterminado. Escribir las ecuaciones de Eulerpara este tipo de movimiento y discutir susignificado.
23.2.- Péndulo compuesto. Llamamos péndulocompuesto a un sólido rígido que puede oscilarlibremente, bajo la influencia de la gravedad,en un plano vertical y alrededor de un ejehorizontal. Utilizar las ecuaciones de Eulerpara determinar el periodo de las pequeñasoscilaciones del péndulo compuesto.
23.3.- Dos pequeñas masas idénticas, de masam cada una de ellas, están montadas en losextremos de una varilla ligera de longitud 2l.El sistema puede girar alrededor de un eje fijovertical que pasa por el centro de la varilla yque forma un ángulo constante con la misma.a) Utilizar las ecuaciones de Euler para calcu-lar el momento que deben suministrar losapoyos del eje para que el sistema gire convelocidad angular constante. b) Calcular las
reacciones sobre los apoyos del eje, separadosuna distancia D.
23.4.- Una lámina rectangular está girando convelocidad angular constante alrededor de unade sus diagonales. a) Determinar el momentoangular de la lámina. b) ¿Es constante dichomomento angular? c) Calcular el momento delpar de fuerzas necesario para mantener elmovimiento de la
Prob. 23.5
lámina.
23.5.- Un disco homo-géneo está montadosobre un eje que pasapor su centro y queforma un ángulo φ conla normal al plano deldisco. Utilizar lasecuaciones de Eulerpara determinar elmomento angular quedeben suministrar los apoyos del eje para queel disco gire con velocidad angular constante.

694 Lec. 23.- Ecuaciones de Euler.
23.6.- Péndulo cónico I.
Prob. 23.6
Una varilla homogénea, demasa m y longitud l, puedegirar libremente alrededorde un eje horizontal (O)que, a su vez, está girandoalrededor de un eje verti-cal, con una velocidadangular φ, como se ilustraen la figura. a) Demostrarque las eces. difes. delmovimiento de la varillason
θ φ2senθ cosθ 3g
2lsenθ
φ senθ 2 φ θ cosθ 0
b) Demostrar que el valor del ángulo θ corres-pondiente al equilibrio (dinámico), para unavelocidad angular φ=ω=cte, es
cos θ0
3g2lω2
c) Demostrar que la frecuencia de las pequeñasoscilaciones de la varilla respecto del ánguloθ0 es
ω osc ω sen θ0
23 .7 . - Péndu lo
Prob. 23.7
cónico II. La barraen forma de L quese muestra en lafigura está girandocon ve loc idadangular constanteω. La varilla ho-mogénea, de longi-tud l y masa m,que se muestra enla figura está arti-culada en O a labarra en forma deL. Determinar larelación existente entre ω y el valor del ánguloθ.
23.8.- Demostrar que en el movimiento librede una peonza simétrica los vectores momentoangular, velocidad angular y el eje de simetríade revolución de la peonza son coplanarios.
23.9.- Brújula giroscópica de Foucault. Ungiróscopo está montado con su centro degravedad en el centro de los anillos con sus-pensión Cardan, por lo que no actúa sobre élpar gravitatorio alguno; pero el eje de simetría
del volante está obligado a moverse en unplano horizontal. Cuando hacemos girar elvolante del giróscopo en la superficie terrestre,existirá una rotación adicional debida a larotación de la Tierra. A partir de las ecuacio-nes de Euler, demuéstrese que, si la frecuenciaangular del giróscopo es grande en compara-ción con la de rotación de la Tierra, el eje derotación del volante oscilará simétricamenterespecto de la dirección del meridiano, por loque el giróscopo puede utilizarse como brújula.
23.10.- Un bloque de madera, macizo y deforma rectangular, cuyas dimensiones son20 cm × 12 cm × 4 cm, gira libremente conuna velocidad angular de 300 r.p.m. Determi-nar la frecuencia de precesión del eje derotación, cuando se introduce una pequeñaperturbación, si éste es: a) el de menor mo-mento de inercia; b) el de mayor momento deinercia de los ejes de simetría del bloque.
23.11.- En el sistema representado en la figura,
C
M
Y
CM
MY
CY
CMY
K
Acr543.pdf 04/11/2006 17:52:08
Prob. 23.11
una rueda de masa m y radio r y momento deinercia I está rodando sin deslizar sobre suelohorizontal y girando en torno a un eje fijovertical con una velocidad angular Ω. Calcularel valor de la fuerza con que la rueda presionacontra el suelo.
Prob. 23.12
23.12.- En el mecanismo que se muestra en la
figura, la placa rectangular delgada está unida
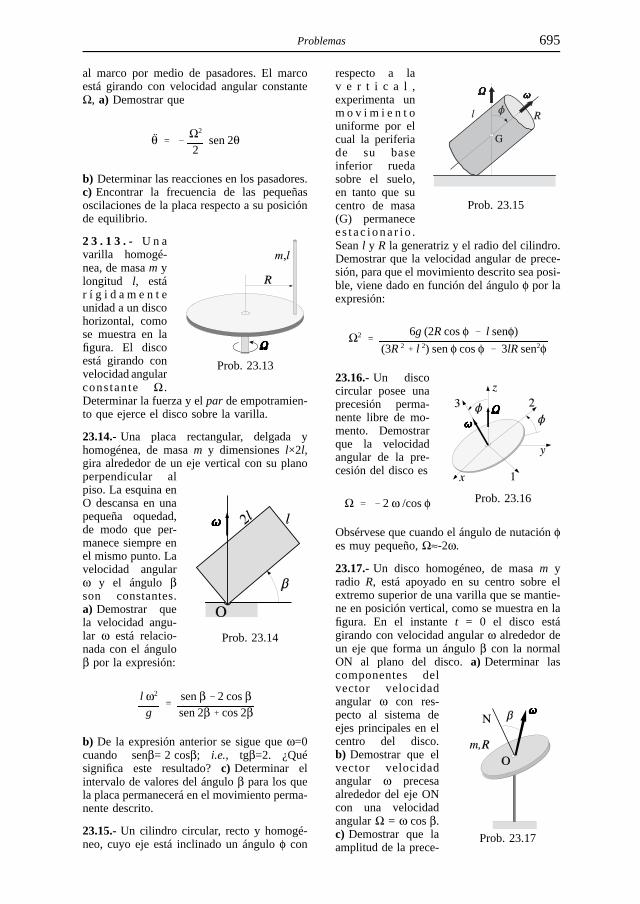
Problemas 695
al marco por medio de pasadores. El marcoestá girando con velocidad angular constanteΩ, a) Demostrar que
θ Ω2
2sen 2θ
b) Determinar las reacciones en los pasadores.c) Encontrar la frecuencia de las pequeñasoscilaciones de la placa respecto a su posiciónde equilibrio.
2 3 . 1 3 . - U n a
Prob. 23.13
varilla homogé-nea, de masa m ylongitud l, estár í g i d a m e n t eunidad a un discohorizontal, comose muestra en lafigura. El discoestá girando convelocidad angularcons tante Ω .Determinar la fuerza y el par de empotramien-to que ejerce el disco sobre la varilla.
23.14.- Una placa rectangular, delgada y
Prob. 23.14
homogénea, de masa m y dimensiones l×2l,gira alrededor de un eje vertical con su planoperpendicular alpiso. La esquina enO descansa en unapequeña oquedad,de modo que per-manece siempre enel mismo punto. Lavelocidad angularω y el ángulo βson constantes.a) Demostrar quela velocidad angu-lar ω está relacio-nada con el ánguloβ por la expresión:
l ω2
gsen β 2 cos βsen 2β cos 2β
b) De la expresión anterior se sigue que ω=0cuando senβ= 2 cosβ; i.e., tgβ=2. ¿Quésignifica este resultado? c) Determinar elintervalo de valores del ángulo β para los quela placa permanecerá en el movimiento perma-nente descrito.
23.15.- Un cilindro circular, recto y homogé-
C
M
Y
CM
MY
CY
CMY
K
Acr544.pdf 04/11/2006 17:57:44
Prob. 23.15
neo, cuyo eje está inclinado un ángulo φ con
respecto a lav e r t i c a l ,experimenta unm o v i m i e n t ouniforme por elcual la periferiade su baseinferior ruedasobre el suelo,en tanto que sucentro de masa(G) permanecee s t a c i o n a r i o .Sean l y R la generatriz y el radio del cilindro.Demostrar que la velocidad angular de prece-sión, para que el movimiento descrito sea posi-ble, viene dado en función del ángulo φ por laexpresión:
Ω2 6g (2R cos φ l senφ)
(3R 2 l 2) sen φ cos φ 3lR sen2φ
23.16.- Un disco
Prob. 23.16
circular posee unaprecesión perma-nente libre de mo-mento. Demostrarque la velocidadangular de la pre-cesión del disco es
Ω 2 ω /cos φ
Obsérvese que cuando el ángulo de nutación φes muy pequeño, Ω≈-2ω.
23.17.- Un disco homogéneo, de masa m y
Prob. 23.17
radio R, está apoyado en su centro sobre elextremo superior de una varilla que se mantie-ne en posición vertical, como se muestra en lafigura. En el instante t = 0 el disco estágirando con velocidad angular ω alrededor deun eje que forma un ángulo β con la normalON al plano del disco. a) Determinar lascomponentes delvector velocidadangular ω con res-pecto al sistema deejes principales en elcentro del disco.b) Demostrar que elvector velocidadangular ω precesaalrededor del eje ONcon una velocidadangular Ω = ω cos β.c) Demostrar que laamplitud de la prece-

696 Lec. 23.- Ecuaciones de Euler.
sión es A = ω sen β. d) Demostrar que elmódulo del momento angular y la energíacinética del disco vienen dados, respectiva-mente, por
L 14
mR 2ω (1 3 cos2β)
Ek
18
mR 2ω2 (1 cos2β)
e) Analizar y describir el movimiento del discoen la representación de los conos del cuerpo ydel espacio. Demostrar que el semiángulo deabertura del cono del cuerpo es β y que elcorrespondiente al cono del espacio es α, dadopor
cos α 1 cos2β
1 3 cos2β
f) Demostrar que el ángulo y determinado porlos ejes de simetría de ambos conos es
cos γ 2 cos2β
1 3 cos2β
y comprobar que β = α + γ. Aplicaciónnumérica: m = 80 g, R = 20 cm, ω =100 rad/s, β = 60°.

24.- Dinámica impulsivadel sólido rígido.
§24.1. Dinámica impulsiva del sólido rígido (697); §24.2. Percusión y percusión angular(697); §24.3. Ecuaciones fundamentales de la dinámica impulsiva (698); §24.4. Movimientoplano. Teorema del centro de percusión (700); §24.5. Percusiones sobre un sólido ligado(702); §24.6. Percusiones sobre un sólido con un punto fijo (703); §24.7. Percusiones sobreun sólido con un eje fijo (705); §24.8. Colisiones. Coeficiente de restitución (707);§24.9. Ecuación simbólica de la dinámica impulsiva (711); §24.10. Teorema de Carnot(712); Problemas (714)
§24.1. Dinámica impulsiva del sólido rígido.- En el transcurso de ciertosprocesos reales, tales como las colisiones, aparición o desaparición brusca deligaduras, explosiones, ..., se observan variaciones finitas de la velocidad duranteintervalos de tiempo infinitesimales o, al menos, difícilmente medibles, de actuaciónde las fuerzas. A tales fuerzas las llamamos fuerzas impulsivas y sus efectos suelenrecibir el nombre de percusiones. La Dinámica Impulsiva del sólido rígido se interesatan sólo en los cambios de velocidad del sólido rígido sometido a las fuerzasimpulsivas, sin preocuparse del cálculo de la intensidad de dichas fuerzas, ni delcálculo de los intervalos de tiempo de actuación de las mismas o de los desplaza-mientos del cuerpo durante la actuación de las fuerzas impulsivas.
En la Lección 19 enunciábamos las dos Leyes del Movimiento Impulsivo de lapartícula; podemos aplicar esas leyes igualmente al Movimiento Impulsivo del sólidorígido:
1. Cuando sobre un sólido rígido actúan simultáneamente las fuerzasordinarias y las fuerzas impulsivas, podemos despreciar las primeras duranteel tiempo de actuación de las segundas.
2. El sólido rígido no cambia de posición durante el tiempo de actuación delas fuerzas impulsivas.
§24.2. Percusión y percusión angular.- Ya hemos definido en leccionesanteriores (§7.7 y §12.3) los conceptos de impulsión (Π) y de impulsión angular (Λ)de una fuerza. Esos conceptos, que son generales, se aplican fundamentalmente a lasfuerzas impulsivas. Tanto el uno como el otro pueden interpretarse como una medida
Manuel R. Ortega Girón 697
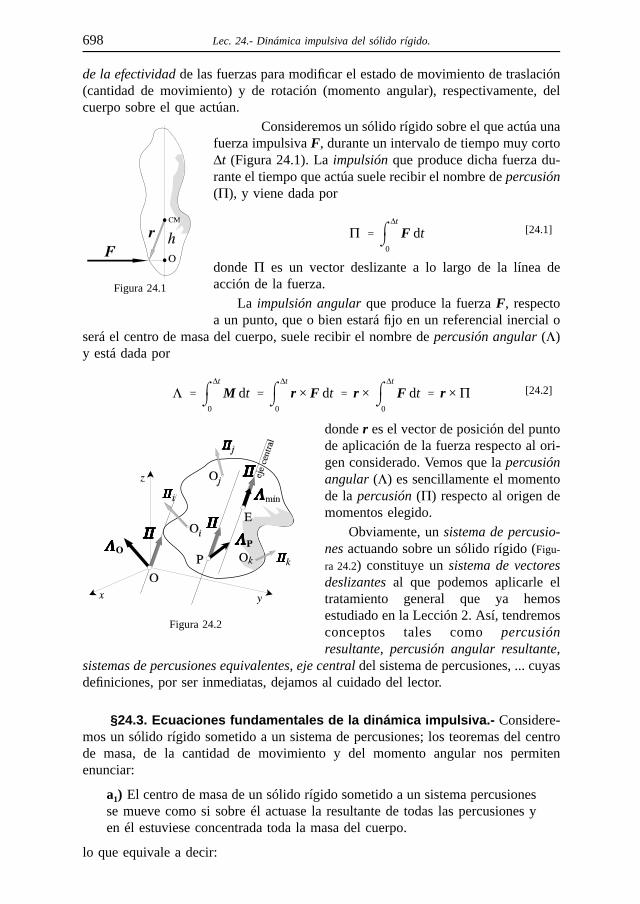
698 Lec. 24.- Dinámica impulsiva del sólido rígido.
de la efectividad de las fuerzas para modificar el estado de movimiento de traslación(cantidad de movimiento) y de rotación (momento angular), respectivamente, delcuerpo sobre el que actúan.
Consideremos un sólido rígido sobre el que actúa una
Figura 24.1
fuerza impulsiva F, durante un intervalo de tiempo muy cortoΔt (Figura 24.1). La impulsión que produce dicha fuerza du-rante el tiempo que actúa suele recibir el nombre de percusión(Π), y viene dada por
[24.1]Π ⌡⌠
Δt
0
F dt
donde Π es un vector deslizante a lo largo de la línea deacción de la fuerza.
La impulsión angular que produce la fuerza F, respectoa un punto, que o bien estará fijo en un referencial inercial o
será el centro de masa del cuerpo, suele recibir el nombre de percusión angular (Λ)y está dada por
[24.2]Λ ⌡⌠
Δt
0
M dt ⌡⌠
Δt
0
r × F dt r × ⌡⌠
Δt
0
F dt r × Π
donde r es el vector de posición del punto
Figura 24.2
de aplicación de la fuerza respecto al ori-gen considerado. Vemos que la percusiónangular (Λ) es sencillamente el momentode la percusión (Π) respecto al origen demomentos elegido.
Obviamente, un sistema de percusio-nes actuando sobre un sólido rígido (Figu-
ra 24.2) constituye un sistema de vectoresdeslizantes al que podemos aplicarle eltratamiento general que ya hemosestudiado en la Lección 2. Así, tendremosconceptos tales como percusiónresultante, percusión angular resultante,
sistemas de percusiones equivalentes, eje central del sistema de percusiones, ... cuyasdefiniciones, por ser inmediatas, dejamos al cuidado del lector.
§24.3. Ecuaciones fundamentales de la dinámica impulsiva.- Considere-mos un sólido rígido sometido a un sistema de percusiones; los teoremas del centrode masa, de la cantidad de movimiento y del momento angular nos permitenenunciar:
a1) El centro de masa de un sólido rígido sometido a un sistema percusionesse mueve como si sobre él actuase la resultante de todas las percusiones yen él estuviese concentrada toda la masa del cuerpo.
lo que equivale a decir:

§24.3.- Ecuaciones fundamentales de la dinámica impulsiva. 699
a2) El cambio que experimenta la cantidad de movimiento de un sólidorígido sometido a percusiones es igual a la percusión resultante.
Expresado en forma analítica tenemos
[24.3]Πi
Π i Δ mv cm m Δv cm m (vcm vcm)
donde hemos utilizado los superíndices - y + para hacer referencia a la velocidad delc.d.m. justamente antes y después de aplicar la percusión.
b) El cambio que experimenta el momento angular de un sólido rígidorespecto a un punto fijo (o a su centro de masa), al aplicarle un sistema depercusiones, es igual a la percusión angular resultante con respecto a dichopunto.
Esto es [24.4]Λi
Λ ii
r i × Π i ΔL II Δω II (ω ω )
donde II es la matriz de inercia en el centro de reducción elegido, que permaneceinvariable durante la percusión ya que el sólido no cambia de posición ni deorientación durante la misma.
Si elegimos como ejes coordenados los ejes principales de inercia del sólido en el instante dela percusión, entonces la matriz de inercia será diagonal y la expresión anterior se descompone entres ecuaciones escalares:
[24.5]Λ1 I1 (ω1 ω1 ) Λ2 I2 (ω2 ω2 ) Λ3 I3 (ω3 ω3 )
donde I1, I2 e I3 son los momentos principales de inercia. Las ecuaciones anteriores determinan lascomponentes de la velocidad angular del sólido después de la percusión
Las expresiones [24.4] y [24.5] toman una forma más sencilla cuando el sólidorígido está obligado a girar en torno a un eje fijo (péndulo compuesto, por ejemplo)o cuando se trata de un movimiento plano en general; entonces
[24.6]Λ eje ΔLeje Ieje Δω Ieje (ω ω )
donde Λeje y Leje son la percusión angular y el momento angular con respecto al ejede rotación fijo.
Así pues, frente a la Dinámica de la Velocidad Continua del sólido rígido, queadmite como ecuaciones fundamentales:
[24.7]F dpdt
ddt
(mv cm) M dLdt
ddt
( IIω )
la Dinámica Impulsiva admite como ecuaciones fundamentales
[24.8]Π m Δvcm Λ II Δω
Comparando las expresiones [24.7] y [24.8], podemos ver la forma de pasar de laDinámica de Velocidad Continua a la Dinámica Impulsiva; bastará con sustituir losconceptos de fuerza por el de percusión, el de momento por el de percusión angulary el de aceleración por el de cambio de velocidad. En la Dinámica de Velocidad

700 Lec. 24.- Dinámica impulsiva del sólido rígido.
Continua está implicado el método diferencial (diferencias infinitesimales); en laDinámica Impulsiva se opera por el método de diferencias finitas.
Por último, resaltaremos que el movimiento discontinuo, característico de laDinámica Impulsiva, entraña, en general, una disipación de energía. Deberemos teneren cuenta esa disipación de energía cuando apliquemos el principio de conservaciónde la energía a problemas de Dinámica Impulsiva, tales como los problemas dechoque, de explosiones, de desintegraciones, ...
§24.4. Movimiento plano. Teorema del centro de percusión.- Conside-
Figura 24.3
remos un sólido rígido, inicialmente en reposo, al que se le aplica una percusión cuyalínea de acción pasa a una distancia h de su centro de masa (Figura 24.3). Como
acabamos de ver, podemos escribir
[24.9]Π mv cm Λ Icm ω
o bien [24.10]Π mv cm h Π Icm ω
de modo que, eliminando Π entre estas dos expresiones,
[24.11]vcm
ωIcm
mh
Se trata de un movimiento de rotación y traslación combinadas,más concretamente de un movimiento plano. En un movimiento
de estas características siempre existe un punto "perteneciente" al cuerpo que seencontrará instantáneamente en reposo. Sea O′ dicho punto; podemos encontrar fácil-mente la distancia h′ del punto O′ al c.d.m.. En efecto, puesto que
[24.12]vO′ vcm ωh′ 0 ⇒ h′vcm
ω
de modo que de [24.11] y [24.12] se sigue
[24.13]h′Icm
m h⇒ m h h′ Icm ⇒ h h′ K 2
cm
siendo Kcm el radio de giro respecto a un eje perpendicular al plano del movimientoy que pasa por el centro de masas.
Si suponemos que el cuerpo pueda girar alrededor de un eje que siendo perpen-dicular al plano del papel pase por el punto O′, al aplicar la percusión en O no seproducirá reacción alguna en el eje, ya que éste no tiende a moverse. En estascondiciones, el punto O recibe el nombre de centro de percusión respecto al puntoO′ y la expresión [24.13] constituye el TEOREMA DEL CENTRO DE PERCUSIÓN, tambiénconocido como TEOREMA DE HUYGENS (vide §21.7)
La distancia (λ) entre los puntos O y O′ es
[24.14]λ h h′ hIcm
mh
Icm mh 2
mh
IO
mh
IO′
mh′

§24.4.- Movimiento plano. Teorema del centro de percusión. 701
que son las mismas expresiones que obtuvimos para la
C
M
Y
CM
MY
CY
CMY
K
Acr54B.pdf 04/11/2006 18:37:55
Figura 24.4
longitud reducida (λ) de un péndulo físico (vide §21.7); estalongitud nos permitió definir y localizar el llamado centro deoscilación del péndulo físico. En el caso del péndulo físico, elpunto O′ es el centro de suspensión; como ya sabemos, ambospuntos son conjugados porque tienen la propiedad deintercambiar entre sí sus papeles.
Cuando una fuerza impulsiva actúa sobre el centro depercusión (O) con respecto a un punto O′, este punto nopresenta tendencia a moverse, de modo que si por O′ pasa uneje alrededor del cual puede rotar el cuerpo, dicho eje noexperimenta reacción percusional alguna. Los jugadores debéisbol saben bien que a menos que la pelota pegue justamen-te en el sitio correcto del bate (el centro de percusión respecto del punto donde sesujeta el bate), el impacto producirá una sensación molesta en sus muñecas y unacierta imprecisión en el disparo. Las mismas consideraciones podemos hacer en elmanejo de algunas herramientas (martillo, pico, ...).
Ejemplo I.- Una varilla homogénea, que se encuentra en reposo sobre un
Figura 24.5
tablero horizontal liso, recibe una percusión frontal Π cuya línea de acciónpasa a una distancia h del centro de la varilla. Determinar el movimiento dela varilla si la percusión se aplica: i) en el centro de masa de la varilla; ii)en su extremo inferior.
Aplicamos las ec. fundamentales de la dinámica impulsiva:
Π mvcm Λcm h Π Icmω 112
ml 2 ω
de las que se sigue inmediatamente
Figura 24.6
vcm
Πm
ω 12 hml 2
Π 12hl 2
vcm
i) Para h=0, será ω=0, y la varilla tendrá un movi-miento de traslación pura.
ii) Para h=l/2, será
ω 12 l2ml 2
Π 6ml
Π 6vcm
l
y la varilla posee un movimiento de rotación pura alrededor delpunto O′ (Figura 24.6) que se encuentra a una distancia h′ delcentro de masa, dada por
mhh′ Icm ⇒ h′
112
ml 2
l2
l6

702 Lec. 24.- Dinámica impulsiva del sólido rígido.
§24.5. Percusiones sobre un sólido ligado.- Cuando a un sólido ligado leaplicamos una percusión (o un sistema de percusiones) aparecen simultáneamentepercusiones de ligadura o reacciones percusionales en los puntos de ligadura.
El Principio de Liberación de LAGRANGE nos permite sustituir las ligaduras ovínculos por las percusiones de ligadura que producen los mismos efectos queaquéllas. Entonces, si llamamos Πi (i=1,2,...n) a las percusiones aplicada (activas) yΠj (j=1,2,...h) a las percusiones de ligadura, las ecuaciones fundamentales de ladinámica impulsiva deberán escribirse en la forma
[24.15]i
Π ij
Π j m (vcm vcm )i
Λ ij
Λ j II (ω ω )
donde Λi y Λj representan los momentos de las percusiones Πi y Πj, respectivamente,con respecto a un punto fijo o al centro de masa del sólido.
Normalmente las percusiones Πi se dan como datos en los problemas deDinámica Impulsiva. Por el contrario, las reacciones percusionales Πj aparecen entrelas incógnitas, i.e., se desconocen inicialmente, y su evaluación exige resolvercompletamente el problema, ya que esas percusiones sólo las conocemos a través desus efectos sobre el movimiento del sistema. En ocasiones, no nos interesará conocerlos valores de las reacciones percusionales y las eliminaremos de las ecuaciones delmovimiento en una etapa inicial; pero, si se desea, se puede proceder a sudeterminación. En ciertos casos podremos calcular el valor de las reaccionespercusionales a partir de las ecuaciones [24.15] que representan las ec. del movimientodel sólido rígido sujeto a ligaduras.
Ejemplo II.- Una varilla homogénea está suspendida verticalmente, por uno de sus extremos, de
Figura 24.7
un eje horizontal, como se muestra en la Figura 24.7. a) Calcular la reacción percusional en el ejecuando se aplica a la varilla una percusión frontal Π: i) en el centro de masa de la varilla; ii) ensu extremo inferior. b) ¿En que punto de la varilla deberá aplicarse la percusión frontal para queno haya reacción percusional en el eje de suspensión?
a) Resolveremos el problema en general, aplicando la percusión Π auna distancia λ del eje de suspensión. Consideramos que el eje está someti-do a una reacción percusional Πeje. Las ec. fundamentales de la dinámicaimpulsiva, tomando momentos con respecto al eje, nos permiten escribir
[1]Π Πeje mvcm λ Π IO′ω13
ml 2 ω
con [2]vcm
l2
ω
De la segunda ec. [1] se sigue
[3]Π 13
ml 2 ωλ
⇒ ω 3λml 2
Π ⇒ vcm
3λ2ml
Π
de modo que, despejando Πeje de la primera ec. [1] y sustituyendo en ella las expr. [3], se obtienela reacción percusional pedida

§24.5.- Percusiones sobre un sólido ligado. 703
[4]Πeje mvcm Π 32
λl
Π Π ⎛⎜⎝
⎞⎟⎠
3λ2 l
1 Π
i) Para λ = l/2 es ii) Para λ = l esΠeje
14
Π Πeje
12
Π
b) De la expr. [4] se sigue que la reacción percusional en el eje será nula cuando la percusiónΠ se aplique a una distancia del eje dada por
[5]3λ2 l
1 0 ⇒ λ 23
l
i.e., en el centro de percusión de la varilla con respecto al eje de suspensión.
Podemos obtener el mismo resultado [5] aplicando el teorema del centro de percusión, biensea en su forma [24.13]:
mhh′ Icm ⇒ hIcm
mh′
112
ml 2
m l2
16
l ⇒ λ h h′ l6
l2
23
l
o en su forma [24.14]: λIO′
mh′
13
ml 2
m l2
23
l
§24.6. Percusiones sobre un sólido con un punto fijo.- Consideremos un
Figura 24.8
cuerpo rígido cuyo movimiento esté restringido de modo que uno de sus puntos, elO, permanezca fijo en un cierto referencial. Se comprende que el cuerpo sólo podrágirar en torno a un eje que pase por dicho punto O; la orientación de ese eje en elespacio podrá ser cualquiera. Este sistema tiene tan sólo tres grados de libertad; dosángulos fijarán la orientación del eje en el espacio y un tercer ángulo determinará larotación del sólido respecto a dicho eje. Supongamos que sobre el sólido actúa unsistema de percusiones Πi, con i = 1, 2, ... n. Las ecuaciones del movimiento impulsi-vo se escriben en la forma
[24.16]iΠ i Π m Δv cm
iΛ i Λ II Δω
donde Π es la reacción percusional en el punto fijo Oy Λ es la correspondiente percusión angular.
Llamaremos Π = Πi y Λ = Λi a la resultante yal momento resultante de las percusiones activas ytomaremos el punto O como centro de reducción (demodo que será Λ=0). Además, para simplificar,supondremos que los ejes coordenados xyz son los ejes
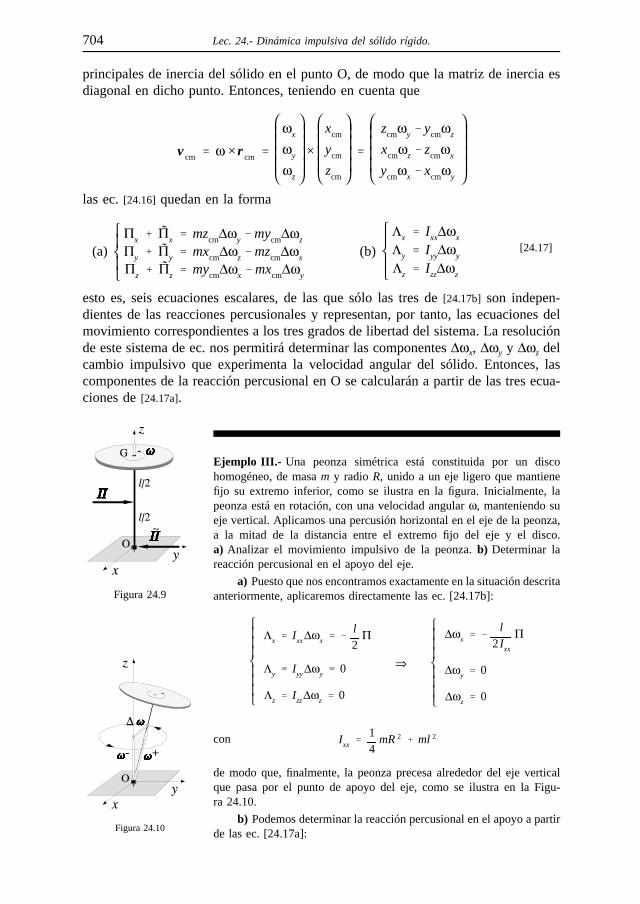
704 Lec. 24.- Dinámica impulsiva del sólido rígido.
principales de inercia del sólido en el punto O, de modo que la matriz de inercia esdiagonal en dicho punto. Entonces, teniendo en cuenta que
v cm ω ×r cm
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
ωx
ωy
ωz
×
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
xcm
ycm
zcm
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
zcmωy ycmωz
xcmωz zcmωx
ycmωx xcmωy
las ec. [24.16] quedan en la forma
[24.17](a)
⎧⎪⎨⎪⎩
Πx Πx mzcmΔωy mycmΔωz
Πy Πy mxcmΔωz mzcmΔωx
Πz Πz mycmΔωx mxcmΔωy
(b)
⎧⎪⎨⎪⎩
Λx IxxΔωx
Λy IyyΔωy
Λz IzzΔωz
esto es, seis ecuaciones escalares, de las que sólo las tres de [24.17b] son indepen-dientes de las reacciones percusionales y representan, por tanto, las ecuaciones delmovimiento correspondientes a los tres grados de libertad del sistema. La resoluciónde este sistema de ec. nos permitirá determinar las componentes Δωx, Δωy y Δωz delcambio impulsivo que experimenta la velocidad angular del sólido. Entonces, lascomponentes de la reacción percusional en O se calcularán a partir de las tres ecua-ciones de [24.17a].
Figura 24.9
Ejemplo III.- Una peonza simétrica está constituida por un discohomogéneo, de masa m y radio R, unido a un eje ligero que mantienefijo su extremo inferior, como se ilustra en la figura. Inicialmente, lapeonza está en rotación, con una velocidad angular ω, manteniendo sueje vertical. Aplicamos una percusión horizontal en el eje de la peonza,a la mitad de la distancia entre el extremo fijo del eje y el disco.a) Analizar el movimiento impulsivo de la peonza. b) Determinar lareacción percusional en el apoyo del eje.
a) Puesto que nos encontramos exactamente en la situación descrita
Figura 24.10
anteriormente, aplicaremos directamente las ec. [24.17b]:
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Λx Ixx Δωxl2
Π
Λy Iyy Δωy 0
Λz Izz Δωz 0
⇒
⎧⎪⎪⎪⎨⎪⎪⎪⎩
Δωxl
2 Ixx
Π
Δωy 0
Δωz 0
con Ixx14
mR 2 ml 2
de modo que, finalmente, la peonza precesa alrededor del eje verticalque pasa por el punto de apoyo del eje, como se ilustra en la Figu-ra 24.10.
b) Podemos determinar la reacción percusional en el apoyo a partirde las ec. [24.17a]:

§24.6.- Percusiones sobre un sólido con un punto fijo. 705
Πx Πz 0 Πy mlΔω x Π⎛⎜⎜⎝
⎞⎟⎟⎠
ml 2
2 Ixx
1 Π 2l 2 R 2
4l 2 R 2Π
§24.7. Percusiones sobre un sólido con un eje fijo.- Consideremos un
Figura 24.11
sólido rígido que pueda girar alrededor de un eje fijo, soportado en los puntos O1 yO2, como se muestra en la Figura 24.11, sometido a un sistema de percusiones Πi. Envirtud del Principio de Liberación de Lagrange,podemos imaginar al sólido libre (de ligaduras)sustituyendo los apoyos O1 y O2 por las re-acciones percusionales Π1 y Π2 en los mismos.
Aplicando las ec. fundamentales de ladinámica impulsiva, tomando el punto O1 comocentro de reducción, obtenemos
[24.18]Π Π1 Π2 m Δv cm
Λ Λ1 Λ2 II Δω
donde Π es la resultante de las percusionesaplicadas, Λ es el momento resultante de lasmisma con respecto a O1 y II es la matriz deinercia en O1.
Ahora bien, si son (xcm,ycm,zcm) las coordenadas del centro de masa del cuerpo,la velocidad de éste puede expresarse en cada instante en función de la velocidadangular del cuerpo; en efecto
[24.19]v cm ω×r cm
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
0
0
ω×
⎛⎜⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎟⎠
xcm
ycm
zcm
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
ycmω
xcmω
0
Así, efectuando las operaciones implícitas en [24.18], obtendremos
[24.20](a)
⎧⎪⎪⎨⎪⎪⎩
Πx Π1x Π2x mycm Δω
Πy Π1y Π2y mxcm Δω
Πz Π1z Π2z 0
(b)
⎧⎪⎪⎨⎪⎪⎩
Λx l Π2y Ixz Δω
Λy l Π2x Iyz ΔωΛz Izz Δω
esto es, seis ecuaciones escalares, de las que solo una, la tercera de [24.20b] esindependiente de las reacciones percusionales y constituye, por tanto, la ecuación delmovimiento impulsivo del cuerpo, correspondiente al único grado de libertad quetiene el sistema. Las dos primeras ec. [24.20a] y las dos primeras ec. de [24.20b] nospermiten determinar las componentes Π1x, Π1y, Π2x y Π2y de las reaccionespercusionales en los apoyos del eje. Nos queda entonces la tercera ec. de [24.20b] que

706 Lec. 24.- Dinámica impulsiva del sólido rígido.
puede resolverse teniendo en cuenta el sentido de la componente Πz de la resultantede las percusiones aplicadas y el tipo de apoyos del eje.
Podemos determinar ahora las condiciones que debe cumplir una percusiónaplicada al sólido para que el eje de rotación no sufra reacciones percusionales en susapoyos. Para ello, anularemos todas las componentes de las reacciones percusionalesen las ecuaciones [24.20], con lo que nos quedará
[24.21](a)
⎧⎪⎨⎪⎩
Πx mycm ΔωΠy mxcm ΔωΠz 0
(b)
⎧⎪⎨⎪⎩
Λx Ixz ΔωΛy Iyz ΔωΛz Izz Δω
1ª condición.- La percusión debe ser perpendicular al eje, aunque no concu-rrente con él.
En efecto, esta condición es consecuencia de la tercera ec. de [24.21a], ya que la percusión Π nodeberá tener componente a lo largo del eje.
En lo que sigue, consideraremos que la percusión aplicada, Π, es perpendicularal plano xz (y=0), de modo que las ec. [24.21] se convierten en
[24.22](a)
⎧⎪⎨⎪⎩
Πx mycm Δω 0Πy mxcm ΔωΠz 0
(b)
⎧⎪⎨⎪⎩
Λx Ixz Δω 0Λy Iyz Δω 0Λz Izz Δω
2ª condición.- El centro de masa debe encontrarse fuera del eje fijo, en unplano que pase por el eje fijo y que sea perpendicular a la percusión.
En efecto, si el centro de masa se encontrase sobre el eje de
Figura 24.12
rotación fijo, sus coordenadas serían (0,0,zcm), por lo que las tresecuaciones [24.22a] exigirían que Πx = Πy = Πz = 0 (ausencia depercusión aplicada). Además, de la primera ec. [24.22a] se sigueque ycm=0, por lo que el centro de masa debe encontrarse en elplano y=0, como se ilustra en la Figura 24.12.
3ª condición.- El eje de rotación fijo deberá serun eje principal de inercia en O1.
En efecto, de las dos primeras ec. [24.22b] se sigue Ixz=0 y Iyz=0,por lo que el eje z (eje de rotación) debe ser un eje principal deinercia.
4ª condición.- La percusión deberá aplicarse enel centro de percusión del sólido con respecto aleje fijo de rotación.
Como ya sabemos, se denomina centro de percusión al punto donde debeaplicarse la percusión Π para que no existan reacciones percusionales en los apoyosdel eje. Determinaremos, a continuación, las coordenadas del centro de percusión (P,en la Figura 24.12).
De la segunda ec. [24.22a] y de la tercera ec. [24.22b] se sigue
[24.23]Π Πy mxcm Δω Λz xP Π Izz Δω
de las que se deduce la distancia xP de la línea de acción de la percusión Π al eje derotación fijo; i.e.,

§24.7.- Percusiones sobre un sólido con un eje fijo. 707
[24.24]xp
Izz
m xcm
o bien m xcm xP Izz
Obsérvese que esta expresión es la misma ec. [24.?] que obtuvimos con anterioridadcon un razonamiento simplificado. Por consiguiente, la 4ª condición no es más queel TEOREMA DEL CENTRO DE PERCUSIÓN.
§24.8. Colisiones. Coeficiente de restitución.- Consideremos dos sólidoslibres (no ligados) que se mueven de una forma cualquiera. En el instante en quechocan entre sí, se ponen en contacto y aparecen entre ellos sendas percusionesiguales y opuestas que dan lugar a un cambio brusco en el estado de movimiento decada uno de los sólidos. En general, los sólidos se separan después de la colisión,continuando con movimiento libre.
En la Figura 24.13 hemos representado dos
Figura 24.13
sólidos en el instante en que chocan, poniéndoseen contacto los puntos A1 y A2 pertenecientesrespectivamente a cada uno de ellos. Elegiremosunos ejes coordenados en la forma en que seindica en la figura: el origen en el punto decontacto A1≡A2 (coinciden en el mismo puntodel espacio), los eje y y z contenidos en el planotangente común a ambos sólidos en dicho puntoy el eje x perpendicular a dicho plano.
Supongamos que conocemos las magnitudesreferentes a la geometría de masas de ambos cuerpos, así como sus posiciones yvelocidades (de traslación y rotación) justamente antes del choque. Nuestro propósitoes determinar el estado de movimiento de cada sólido justamente después del choque,así como la magnitud de la percusión de choque.
Si llamamos Π a la percusión de choque que actúa sobre en cuerpo 2, en virtuddel principio de acción-reacción, la percusión de choque que actúa sobre el cuerpo1 será -Π. Así, aplicando la primera ec. fundamental de la dinámica impulsiva a cadauno de los dos cuerpos tendremos
[24.25]Π m1 (vcm,1 vcm,1 ) Π m2 (vcm,2 vcm,2 )
y, tomando momentos con respecto a los centros de masa, G1 y G2, de los cuerposrespectivos, escribiremos
[24.26]r1 × Π II1 ( ω1 ω1 ) r2 × Π II2 ( ω2 ω2 )
Las expr. [24.25] y [24.26] constituyen un sistema de 12 ecuaciones escalares con15 incógnitas: tres componentes para cada una de las magnitudes v+
cm,1, v+cm,2, ω+
1, ω+2
y Π. Obviamente necesitamos más información acerca de las características delchoque para poder resolver el problema.
En primer lugar, observaremos que si las superficies de los cuerpos colisionantesson lisas, sin rozamiento, la percusión de choque (Π) será perpendicular al plano

708 Lec. 24.- Dinámica impulsiva del sólido rígido.
tangente común en el punto de contacto entre los cuerpos (i.e., tendrá la dirección deleje x, en Figura 24.13); de este modo se eliminan dos incógnitas, con lo quedispondremos de 12 ecuaciones con 13 incógnitas.
La ecuación que nos falta está relacionada con el balance energético durante lacolisión. Así, si la colisión es perfectamente elástica, la suma de las energías cinéticas(traslación y rotación) de los cuerpos tendrá el mismo valor antes y después de lacolisión, lo que nos proporciona otra ecuación, de modo que el problema estaráformalmente resuelto.
En el caso en que la colisión sea parcialmente elástica, la energía cinética no seconserva. Entonces deberemos conocer la pérdida de energía cinética durante lacolisión (i.e., el Q) o el coeficiente de restitución de la colisión, ya definidos en laLec. 19, para obtener la ecuación que nos falta.
En una colisión general, entre cuerpos extensos, el coeficiente de restitución (e)se define como el cociente entre las componentes normales (dirección del eje x, enla Figura 24.13) de las velocidades relativas de los puntos en contacto (A1, A2) despuésy antes de la colisión, cambiado de signo; i.e.,
[24.27]e( v1 v2 ) i
( v1 v2 ) i
o bien [24.28]( v1 v2 )normal e ( v1 v2 )normal
que es, como ya vimos en §19.4, la REGLA DE HUYGENS-NEWTON, aplicable para lascomponentes de las velocidades a lo largo de la normal común a la superficie de loscuerpos en el punto de contacto.
Ejemplo IV.- Una varilla cae en posición horizontal bajo la acción de la gravedad y choca con unfilo A situado a la mitad de la distancia entre el centro y un extremo de la varilla, como se ilustraen la Figura 24.14. Sean v0 la velocidad de la varilla justamente antes del choque y sea e elcoeficiente de restitución entre la varilla y el filo. a) Determinar la velocidad del centro de masade la varilla y la velocidad angular de ésta inmediatamente después del choque. b) Determinar lareacción percusional en el filo A. c) Comprobar que se conserva el momento angular con respectoal punto A. d) ¿Se conserva la energía cinética durante el choque? e) Particularizar los resultadosde los dos primeros apartados para el caso de e=0. f) Ídem para el caso en que el choque seaperfectamente elástico.
a) Sean vcm y ω la velocidad del centro de masa y la velocidad angular de la varillainmediatamente después del choque. Durante el choque, la varilla está sometida a una percusiónΠ, aplicada en A, como se indica en la Figura 24.14.
Aplicamos las ec. de la Dinámica Impulsiva (origen de momentos en G):
[1]Π m (vcm v0 ) l4
Π 112
ml 2ω
que divididas miembro a miembro nos conducen a
[2]l4
112
l 2 ωvcm v0
⇒ lω 3 (v0 vcm) ⇒ 3vcm lω 3v0

§24.8.- Colisiones. Coeficiente de restitución. 709
Por otra parte, de la definición del coeficiente de
Figura 24.14
restitución,
evA
v0
⇒ vA e v0
siendo vA la velocidad del punto A de la varilla inme-diatamente después del choque y que está relacionadacon la velocidad vcm del centro de masa y con la veloci-dad angular ω; esto es,
[3]vA vcm ω l4
e v0
Resolviendo el sistema de dos ecuaciones [2]-[3] con respecto de las incógnitas vcm y ω se obtiene
[4]vcm
3 4e7
v0 ω 127
(1 e)v0
l
como el lector comprobará fácilmente.
b) De la primera ecuación de [1], sustituyendo el valor de vcm, se sigue
Π m (v0 vcm) ... 47
(1 e) mv0
c) Calculamos los momentos angulares antes (L-) y después (L+) del choque en el punto A:
[5]
⎧⎪⎪⎨⎪⎪⎩
L mv0
l4
L mvcm
l4
112
ml 2ω m 3 4e7
v0
l4
112
ml 2 127
(1 e)v0
l... mv0
l4
de modo que ΔL= L+ - L- = 0, con independencia del valor del coeficiente de restitución.
d) Las energía cinéticas justamente antes y después del choque son
[6]
⎧⎪⎪⎨⎪⎪⎩
Ek12
mv 20
Ek12
mv 2cm
12
112
ml 2ω2
de modo que, sustituyendo los resultados [4], tenemos
Ek12
m ⎛⎜⎝
⎞⎟⎠
3 4e7
2
v 20
12
112
ml 2 122
72(1 e)2
v 20
l 2... 1
2mv 2
04e 2 3
74e 2 3
7Ek
o sea [7]ΔEk Ek Ek47
(1 e 2) Ek ≤ 0
ya que e≤1, por lo que siempre habrá pérdida de energía cinética, salvo en el caso particular en quela colisión sea perfectamente elástica (e=1).
e) Si ponemos e=0 en las expresiones [4], obtenemos
vcm
37
v0 ω 127
v0
l

710 Lec. 24.- Dinámica impulsiva del sólido rígido.
verificándose
Figura 24.15
vcm ω l4
como es obvio, ya que la varilla queda fijada instantá-neamente en el punto A y rota alrededor de dicho punto(Figura 24.15 arriba).
La reacción percusional en A será
Π 47
mv0
f) Si ponemos e=1 (choque perfectamente elástico),serán
vcm
17
v0 ω 247
v0
l
y la situación después del choque es la que se ilustra en la Figura 24.15 (abajo).
La reacción percusional en A será
Π 87
mv0
Ejemplo V.- Cuando abandonamos la varilla (Figura 24.16) desde la posición horizontal, al llegar
Figura 24.16
a la posición vertical colisiona elásticamente contra el bloque de masa m. a) Determinar lavelocidad angular de la varilla y la velocidad del bloque inmediatamente después de la colisión.b) Determinar la reacción percusional en el eje de suspensión de la varilla.
Calcularemos el momento de inercia de la varilla con respecto al eje de suspensión:
IO
13
(3m)l 2 ml 2
Aplicando el Principio de Conservación de la Energíaen las posiciones horizontal y vertical, obtenemos lavelocidad angular de la varilla, ω0, justamente antes de lacolisión:
3 mg l2
12
IOω0
12
ml 2 ω0
o sea ω0
3gl
a) Las percusiones que actúan sobre la varilla y sobre el bloque son las indicadas en laFigura 24.16. En consecuencia, tomando momentos con respecto al eje, el momento percusionales nulo y el momento angular del sistema (varilla+bloque) se conserva:
[1]IOω0 IOω mvl
donde ω y v son la velocidad angular de la varilla y la velocidad del bloque, respectivamente,justamente después de la colisión.

§24.8.- Colisiones. Coeficiente de restitución. 711
Por otra parte, puesto que la colisión es elástica, se conserva la energía cinética del sistema:
[2]12
IOω20
12
IOω2 12
mv 2
Para resolver el sistema de ecuaciones [1]-[2] es conveniente proceder de la siguiente forma:
⎧⎪⎨⎪⎩
IO (ω0 ω ) mvl
IO (ω20 ω2 ) mv 2
⇒
⎧⎪⎨⎪⎩
IO (ω0 ω ) mvl
IO (ω0 ω ) (ω0 ω ) mv 2⇒
⇒
⎧⎪⎨⎪⎩
ml 2 (ω0 ω ) mvl
mvl (ω0 ω ) mv 2⇒
⎧⎪⎪⎨⎪⎪⎩
ω0 ω vl
ω0 ω vl
⇒⎧⎪⎨⎪⎩
ω 0
ω0
vl
de modo que la varilla queda en reposo después de la colisión y el bloque se mueve con unavelocidad
v ω0 l 3gl
b) La percusión en el eje es igual al cambio que experimenta la cantidad de movimiento delsistema; esto es,
Π eje Δp (mv) (3mv0,cm) m (v 3v0,cm) m (ω0l 3ω0
l2
) 12
mω0l12
mv
que, al ser negativa, tiene la dirección que se indica en la Figura 24.16. Obsérvese que la percusiónen el punto de impacto es
Π mv
por lo que la percusión en el eje es la mitad de ésta.
§24.9. Ecuación simbólica de la dinámica impulsiva.- Consideremos un sis-tema constituido por N partículas. Sean mi, ri y vi la masa, el vector de posición y lavelocidad (en un cierto referencial inercial) de la partícula i-ésima. Designaremos porΠi y Πi a las resultantes de las percusiones exteriores y de las percusiones de ligaduraque actúan sobre mi. Aplicando la ecuación fundamental de la dinámica impulsiva acada una de las N partículas tenemos:
[24.29]Π i Π i mi Δv i (i 1,2,...N)
Imaginemos ahora un desplazamiento virtual δri para cada una de las N partículasdel sistema (i.e., compatible con las ligaduras), multipliquemos escalarmente cada unade las N ec. [24.29] por el correspondiente desplazamiento virtual y sumémoslastodas:
[24.30]i
Π i δr ii
Π i δr ii
mi Δv i δr i

712 Lec. 24.- Dinámica impulsiva del sólido rígido.
En el caso ordinario de que las ligaduras sean bilaterales (reversibles), laspercusiones de ligadura serán normales a los desplazamientos que permiten, i.e.,Πi⊥δri, por lo que el trabajo virtual1 correspondiente será nulo y, en consecuencia,también lo será el segundo sumatorio de la expr. [24.30], de modo que podemosescribir
[24.31]i
[Π i mi Δv i ] δr i 0
conocida como ecuación simbólica de la dinámica impulsiva.
§24.10. Teorema de Carnot.- Consideremos un sistema material cuyo movi-miento está condicionado por ligaduras independientes del tiempo (esclerónomas).Supongamos que, en un instante dado, se introducen bruscamente nuevas ligaduras.
Puesto que sobre el sistema tan sólo actúan percusiones de ligadura, la ecuaciónsimbólica de la dinámica impulsiva [24.31] se reduce a
[24.32]i
mi Δv i δr i 0
En la que los desplazamientos virtuales δri deberán ser compatibles con todas lasligaduras, tanto las iniciales como las nuevas.
Podemos considerar los δri como los desplazamientos realmente experimentadospor las partículas del sistema inmediatamente después de las percusiones de ligadura;obviamente, estos desplazamientos serán proporcionales a las respectivas velocidadesde las partículas inmediatamente después de dicha percusiones, i.e.,
[24.33]δr i v i δ t
de modo que podemos sustituir los δri por las vi+ en la expr. [24.32];
[24.34]i
mi (v i v i ) v i 0
o sea [24.35]i
miv2
ii
mi v i v i
Por otra parte,
[24.36]i
mi (v i v i ) 2
i
miv2
ii
miv2
i 2i
miv i v i
en la que sustituiremos la expr. [24.35] para obtener
[24.37]i
mi (v i v i ) 2
i
miv2
ii
miv2
i
1 Obsérvese que los términos de la expr. [24.30] no son trabajos virtuales, sino acciones (i.e.,trabajo × tiempo).

§24.10.- Teorema de Carnot. 713
que escribiremos en una forma más conveniente
[24.38]i
12
miv2
ii
12
miv2
ii
12
mi (v i v i ) 2
que expresaremos en forma simbólica
[24.39]E ( )k E ( )
k E (p)k
y que constituye el
TEOREMA DE CARNOT2.- Cuando en un sistema material rígido en movi-miento se introducen bruscamente nuevas ligaduras persistentes, se producenreacciones percusionales que determinan una disminución de su energía ciné-tica, cuyo valor es igual a la energía cinética que poseería el sistema si suspuntos se moviesen con las velocidades perdidas.
Ejemplo VI.- Acoplamiento de discos.- Un disco homogéneo, de masa m y radio r, está girando
Figura 24.17
libremente alrededor de su eje con una velocidad angular ω0. Un segundo disco, cuyo eje es parale-lo al del primero, también homogéneo, de masa 4m y radio 2r, se encuentra inicialmente en reposo.Acercamos el segundo disco al primero, manteniendo los eje paralelos entre sí, de modo que seponen en contacto por sus bordes; entonces, el mayor comienza a girar y el pequeño se frena. De-terminar las velocidades angulares de ambos discos cuando acoplen sus velocidades, dejando deresbalar, uno con respecto a otro, en el punto de contacto.
Los momentos de inercia del disco pequeño (Ip) y del disco grande (Ig) con respecto a sus ejesrespectivos son:
Ip
12
mr 2 Ig
12
(4m) (2r)2 8 mr 2
de modo que [1]Ig 16 Ip
La energía cinética perdida por el sistema es
12
Ip (ω20 ω2) 1
2Ig (0 Ω2)
y la energía debida a las velocidades perdidas es
12
Ip (ω0 ω )2 12
Ig (0 Ω )2
de modo que aplicando el teorema de Carnot resulta
[2]12
Ip (ω20 ω2) 1
2Ig (0 Ω2) 1
2Ip (ω0 ω )2 1
2Ig (0 Ω )2
que, después de algunas operaciones y teniendo en cuenta [1], se reduce a
2 Lazare CARNOT (1753-1823); matemático francés.

714 Lec. 24.- Dinámica impulsiva del sólido rígido.
[3]ω (ω0 ω ) 16Ω2
Cuando, finalmente, los discos dejan de resbalar en el punto de contacto mutuo, se cumplirála condición de ligadura
[4]rω 2rΩ ⇒ ω 2Ω
y resolviendo el sistema de ecuaciones [3]-[4] se obtienen las velocidades angulares pedidas:
ωω0
5Ω
ω0
10
Problemas
24.1.- El plato de un tocadiscos está girandolibremente (desembragado del motor) a razónde 33 rpm. Una pieza de cera, de 20 g, caeverticalmente y se adhiere al plato a unadistancia de 15 cm de su eje. La velocidad an-gular del plato se reduce, por esa causa, a30 rpm. Calcular el momento de inercia delplato.
24.2.- Un sólido rígido,
Prob. 24.2
de masa m, estásuspendido de un ejehorizontal situado auna distancia h de sucentro de masa, comose indica en la figura.Sabemos que cuandoaplicamos una percu-sión Π, horizontal yperpendicular al eje,cuya línea de acciónpasa a una distancia 2hde eje de suspensión, dicho eje absorbe la mi-tad de dicha percusión. Determinar el momen-to de inercia del solido con respecto al eje desuspensión.
24.3.- Una barra de 18 cm de longitud estásuspendida de un punto fijo O mediante unhilo ligero de 36 cm de largo. a) Determinar laposición del punto de la barra donde deberá
aplicarse una percusión horizontal de modoque no aparezcan reacciones en el punto O.b) Explicar lo que ocurriría si la percusión seaplicase por encima o por debajo del puntoanteriormente determinado.
24.4.- Una varilla homogénea, de longitud L ymasa M, se encuentra en reposo sobre unplano horizontal liso. Un disco de hockey, demasa m, se mueve sobre dicho plano en direc-ción perpendicular a la varilla y con unavelocidad v0. El disco choca elásticamente conla varilla en un punto P situado a una distanciah del centro de ésta. a) ¿Qué magnitudes seconservan durante el choque? b) ¿Cuál deberáser la masa del disco para que quede en reposoinmediatamente después del choque? c) En elsupuesto anterior, calcular la velocidad delcentro de masa de la varilla y la velocidadangular de ésta. d) Determinar la posición delpunto Q de la varilla que permanece en reposodespués de la colisión. e) Demostrar que si eldisco choca en el punto Q, el punto P perma-necerá en reposo.
24.5.- Una varilla homogénea, de masa M ylongitud L, puede girar libremente alrededor deun eje horizontal que pasa por uno de susextremos, como se muestra en la figura. Unproyectil, de masa m, incide sobre la varilla,con una velocidad v0, en una dirección perpen-

Problemas 715
dicular al plano deter-
Prob. 24.5
minado por la varilla yel eje. Supongamos quela colisión sea perfecta-mente elástica. a) Ana-lizar el movimiento delproyectil y de la varillajustamente después dela colisión en funciónde valor del parámetrol (distancia del puntode impacto al eje desuspensión de la vari-lla). b) Ídem la percu-sión suministrada porel eje. ¿Para que valorde l no se produce reacción percusiva en eleje?
24.6.- Repetir el Problema 24.5 para el caso enque la colisión sea parcialmente elástica; i.e.,caracterizada por un coeficiente de restitución0<e<1. i) Particularizar los resultados para lacolisión perfectamente elástica. ii) Ídemcompletamente inelástica.
24.7.- Un proyectil, de masa m, colisiona
Prob. 24.7
elásticamente con una barra homogénea, demasa M y longitud L, que puede girar alrede-dor de un eje fijo horizontal que pasa por unode sus extremos. El proyectil incide sobre elcentro de masa de la barra, en una direcciónque forma un ángulo θ0 con la horizontal,como se ilustra en la figura. Supongamosdespreciable el roza-miento entre el proyec-til y la barra. a) Deter-minar el movimientodel proyectil y de labarra un instante des-pués de la colisión.b) Determinar la percu-sión en el eje.
24.8.- Repetir el Pro-blema 24.7 en el su-puesto de que el pro-yectil quede incrustadoen la barra.
24.9.- Repetir el Problema 24.7 en el supuestode que la barra se encontrase inicialmente enreposo sobre un plano horizontal, sin másligadura que la impuesta por dicho plano.
24.10.- Una varilla homogénea, de masa m y
Prob. 24.10
longitud l cae desde una cierta altura. En elinstante en el que uno de sus extremos toca elsuelo, la varilla forma un ángulo de 60° con elmismo, su centro de masa tiene una velocidadv y está rotando con una velocidad angular ω,
c o m o s eilustra en lafigura. Su-p o n g a m o sque la coli-s i ó n s e aperfectamentee l á s t i c a .a ) D e t e r -minar lasnuevas velo-cidades de traslación y de rotación de la varilladespués del choque. b) Calcular la percusiónsobre el suelo.
24.11.- Una viga uniforme, de longitud 2l y
Prob. 24.11
masa m, está sostenida horizontalmente pordos apoyos, A y B, a una distancia x delcentro G de la viga. Determinar la distancia xpara que, al suprimirse súbitamente uno de losapoyos, no varíe en ese instante la reacción enel otro.
24.12.- Una varilla
Prob. 24.12
AB, de longitud l,está sujeta altecho, en posiciónhorizontal, en laforma que se indi-ca en la figura,mediante unoshilos ligeros. Unhilo DA, ligero, de longitud 2h, está unido altecho y a un extremo de la varilla. En un ins-tante dado se rompe el hilo de suspensión enC. Analizar el movimiento impulsivo de lavarilla cuando se tensa el hilo DA.
24.13.- Una varilla homogénea, de masa m ylongitud l, está girando con velocidad angularconstante ω alrededor de un eje fijo perpen-dicular a la varilla y que pasa por uno de susextremos. En un instante dado, la varilla sesepara del eje. Determinar el movimiento de lavarilla (i.e., la velocidad de su centro de masay la velocidad angular de la varilla) unmomento después de que abandone al eje.
24.14.- Un bloque homogéneo de forma pris-mática, de sección cuadrada de lado l, deslizasobre un plano horizontal liso con velocidad v.Cuando choca contra el tope O que se indica

716 Lec. 24.- Dinámica impulsiva del sólido rígido.
en la figura,
Prob. 24.14
gira alrededorde él. Calcular:(a) La veloci-dad angularcon que seiniciará el giro;(b) el valormínimo de lavelocidad v delbloque para que se produzca el vuelco de éste,sobrepasando al tope.
24.15.- Un rodillo sólido, de masa m y radio r,
Prob. 24.15
rueda sin resbalar sobre un plano horizontal ycolisiona inelásticamente contra una obstruc-ción sólida, de altura h < r. Durante el breví-simo intervalo de tiempo que dura la colisión,en el punto O del rodillo actúa una percusióndefinida por sus componentes Πx y Πy, comose indica en la figura, y tiene lugar un cambiosustancial en el movimiento del rodillo. Supon-dremos que existe suficiente fricción para queno haya resbalamiento en O, de modo que estepunto será el nuevo centro instantáneo derotación. a) Calcular la velocidad del c.m. delrodillo y la velocidad angular de éste uninstante después de la colisión, así como lascomponentes Πx y Πy de la percusión. b) De-terminar la altura mínima de la obstrucciónpara que el rodillo no la sobrepase.
24.16.- Jugando al billar I. Una bola de bi-llar, que se encuentra inicialmente en repososobre la mesa, recibe un golpe de taco demodo que la línea de acción del impulso estácontenida en el plano vertical que pasa por elcentro de la bola, es paralela a la superficie dela mesa y está situada a una distancia h delcentro de la bola. Como consecuencia de eseimpulso, la bola sale lanzada hacia adelantecon una velocidad v0 y, debido a su "efecto",posteriormente adquiere una velocidad v. SeaR el radio de la bola. a) Demostrar que
v 57
⎛⎜⎝
⎞⎟⎠
hR
1 v0
b) Demostrar que si queremos conseguir que labola ruede sin resbalar sobre el tablero desdeel mismo momento en que recibe el nombre elimpulso, la línea de acción de éste debe estarsituada a una distancia h = 2R/5 por encimadel centro de la bola. c) Demostrar que el"efecto" será hacia adelante o hacia atrás segúnque h sea mayor o menor que 2R/5. d) Demos-trar que es imposible, con el "efecto deretroceso", dar a la bola una velocidad de re-troceso a menos que el impulso tenga unacomponente vertical hacia abajo.
24.17.- Jugando al
Prob. 24.17
billar II. ¿Cuálserá la altura ópti-ma de la banda deuna mesa de billar?¿En base a qué seráó p t i m a d i c h aaltura? Explíquese.
24.18.- Jugando al billar III. Una bola de
Prob. 24.18
billar de radio r, que se encuentra en repososobre la mesa, recibe una percusión horizontala una altura r/3 sobre el tablero, a consecuen-cia de la cual ad-quiere una velo-cidad v0. (a) Cal-cular la velocidadangular inicial der o t a c i ó n ω 0 .(b) La velocidadde la bola cuandodeje de resbalar ysimplemente rue-de.
24.19.- Jugando al billar IV. Una bola debillar recibe un golpe de taco de tal modo queadquiere un "efecto" caracterizado por unavelocidad angular Ω alrededor de un eje verti-cal que pasa por su centro, al tiempo querueda sobre el paño de la mesa, hasta quechoca perpendicularmente con una de las ban-das de ésta. a) Describir el movimiento de labola después de chocar con la banda. b) Cal-cular el ángulo de rebote, suponiendo que elchoque con la banda sea perfectamente elásticoy que la bola pierda todo su "efecto" duranteel mismo.
24.20.- Una pelota de tenis, de radio R, estáanimada de un movimiento de rotación conuna velocidad ω0 alrededor de un diámetrohorizontal, y cae verticalmente sobre un suelomuy rugoso. Un instante antes del choque conel suelo, la velocidad vertical de la pelota esv0. Supongamos que el choque sea imperfecta-mente elástico con un coeficiente de restitu-ción e. Describir detalladamente el movimiento

Problemas 717
de la pelota después del choque y demostrarque ésta vuelve a caer sobre el suelo a unadistancia 4ev0ω0R/5g del punto del primerrebote.
24.21.- Dos pequeños discos idénticos, de
Prob. 24.21
masa m cada uno de ellos, están unidos entresí por una varilla ligera de longitud 2a y des-cansan sobre una superficie horizontal lisa,como se muestra en la figura adjunta. Untercer disco, de masa m, se mueve con unavelocidad v0 en dirección perpendicular a lavarilla y choca elásticamente con uno de losdiscos. Estudiar el movimiento del sistemadespués de la colisión.
24.22.- Tres deslizaderas idénticas, de masa m,
Prob. 24.22
pueden deslizar sin fricción sobre dos ejes, enángulo recto, contenidos en un plano hori-zontal, como se ilustra en la figura. Dos deellas, B y C están unidas por una varilla rígiday ligera y se encuentran inicialmente en repo-so. Lanzamos la otra deslizadera (A) con unavelocidad v0 de modo que colisiona elástica-mente (e=1) con la deslizadera B. a) Determi-nar la velocidad de cada deslizadera justamen-te después de la colisión. b) Determinar lapercusión de compresión en la varilla y lasreacciones percusionales en los ejes. c) ¿Seconserva la cantidad de movimiento del siste-ma total?
24.23.- Una masa puntual, de magnitud m, está
Prob. 24.23
unida mediante un hilo ligero, flexible einextensible, de longitud L, a un punto fijo O.Abandonamos la masa puntual, partiendo del
reposo, en lap o s i c i ó nindicada enla figura. De-terminar laamplitud delas oscila-ciones pen-dulares dedicha masa.¿Se conservala energíadurante todoel proceso?
24.24.- Dos discos homogéneos están monta-dos sobre ejes paralelos. Inicialmente ambosdiscos están girando libremente, con veloci-dades angulares constantes. En un instantedado se aproximan entre sí los ejes de rotaciónde sendos discos de modo que éstos quedanacoplados por sus bordes. Determinar lasvelocidades angulares de los discos despuésdel acoplamiento. Expresar los resultados enfunción de las velocidades angulares inicialesy de las razones de masas y radios de losdiscos.
24 .25 . - Un
Prob. 24.25
proyectil dem a s a mincide hori-zontalmentec o n u n avelocidad vsobre unaesfera macizay homogénea de masa m, a la altura de sucentro de masa. La esfera se encontraba ini-cialmente en reposo sobre una superficiehorizontal rugosa y suponemos que la colisiónentre el proyectil y la esfera es perfectamenteelástica. Determinar la velocidad con la queacabará rodando la esfera.
24.26.- Una
Prob. 24.26
placa rectan-g u l a r , d em a s a mu n i f o r m e -mente repar-tida, puedegirar alrede-dor de un ejefi j o h o r i -zontal que coincide con uno de sus bordes, co-mo se indica en la figura. Separamos la placahasta la posición horizontal y la abandonamospartiendo del reposo. Cuando alcanza la posi-ción vertical, colisiona elásticamente contra elborde de otra placa idéntica que se encontraba

718 Lec. 24.- Dinámica impulsiva del sólido rígido.
en reposo sobre un plano horizontal. a) De-terminar las velocidades de cada placa despuésde la colisión. b) Calcular la percusión sumi-nistrada por el eje.
24.27.- Repetir el Problema 24.26 para el casoen que la colisión sea parcialmente elástica;i.e., caracterizada por un coeficiente de restitu-ción 0<e<1.
24.28.- Cada una de las
Prob. 24.28
dos varillas que semuestran en la figurapuede girar alrededorde sendos ejes fijoshorizontales que pasanpor uno de sus extre-mos. Las dos varillasson homogéneas, delongitudes l y 2l y demasas m y 2 m, respec-tivamente, y en susposiciones verticalesmantienen en contacto los topes elásticos desus extremos libres. Separamos la varilla máscorta hasta la posición horizontal y entonces laabandonamos partiendo del reposo. a) Supo-niendo que la colisión entre ellas sea perfec-tamente elástica, determinar sus velocidadesangulares después del primer choque. b) De-terminar las percusiones suministradas por losejes.
24 .29 . - Un
Prob. 24.29
carrete estáformado pordos discoshomogéneosidénticos, der a d i o R ,unidos por uneje cilíndrico,de radio r, en el que está enrollada una cuerdaligera y flexible. Sea m la masa total del ca-rrete e I su momento de inercia con respecto asu eje. Tiramos bruscamente de la cuerda,horizontalmente, como se indica en la figura(i.e., aplicamos una impulsión Π). a) Determi-nar el movimiento del carrete justamentedespués de la impulsión. b) Suponiendo que elsuelo sea rugoso, determinar el movimientofinal del carrete.
24.30.- Una esfera homogénea, de masa M y
Prob. 24.30
radio R, reposa sobre un bloque, de masa m,que se mueve con velocidad constante v0 sobreun tablero horizontal liso, como se ilustra en lafigura. El bloque colisiona inelásticamente enB y queda detenido; entonces, la esferacomienza a rodar sobre el bloque. En elsupuesto de que el rozamiento entre la esfera
y el bloque sea suficiente como para quecomience a rodar, sin resbalar, desde el primerinstante, determinar la velocidad angular de laesfera y las reacciones percusionales.
24.31.- En el dispositivo que se muestra en la
Prob. 24.31
figura, dos bloques homogéneos idénticos, demasa total M, están unidos por un eje ligeroque soporta a una varilla, por su centro, demasa m y longitud l. Los bloques puedendeslizar sobre un par de carriles (A,B) que per-miten la rotación de la varilla. Estando elsistema inicialmente en reposo, aplicamos unapercusión horizontal en el extremo superior dela varilla, en el instante que se muestra en lafigura. a) Determinar el movimiento subsi-guiente del sistema (i.e., la velocidad angularde la varilla y la velocidad de traslación de losbloques). b) Determinar la reacción percusio-nal en el eje.
Apéndices.
A.- Resultados de los problemas. 721
B.- Índice alfabético. 737
Manuel R. Ortega Girón 719
720 Lecciones de Física

A.- Resultados de losproblemas.
13.- Movimientoarmónico simple.
13.1. a) si; b) noT 2 2h/g 1/ν
13.2. s/c
13.3. a) 5 cm; 31.4 s; 0.0318 Hz; 30°b) cos(0.2t+0.5236);-0.2sen(0.2t+0.5236) c) 2.5 cm;0.866 cm/s
13.4. a) 3.40sen(πt+2.0586) =3.40cos(πt+0.4878) b) 10.68 cm/s;33.56 cm/s2 c)
0.0, +3.00 cm, -5.00 cm/s2, -29.65 cm/s2;0.5, -1.59 cm, -9.43 cm/s2, +15.73 cm/s2;1.0, -3.00 cm, +5.00 cm/s2, +29.65 cm/s2;1.5, +1.59 cm, +9.43 cm/s2, -15.73 cm/s2;2.0, +3.00 cm, -5.00 cm/s2, -29.65 cm/s2;
13.5. 0.179 Hz; 71.1 cm
13.6. T2π t0
arccos[(a c)/2b]
13.7. 120°
13.8. a) s/cb) eje x: mov. unif.; eje y: m.a.s.c)
v 2 v 20 ω 2y 2
0 sen2ω t
a ω 2y0 cosω t
d) F=(0 -ky 0); k=mω2
13.9. a) A<g/(4π2ν2) b) A<(µg)/(4π2ν2)
13.10. a) 3.83 cm, subiendo b) 4.93 cm
13.11. ν 15.76 a
m(S.I.)
13.12. 13.13.T 2π cg
T 2π L2g
13.14. 0; 0; 0 13.15. a) E/3 b) 2E/3 c) s/c
13.16. 1.76 Hz 13.17. 172.4 g
13.18. x0
mg sen θk
ω km
Manuel R. Ortega Girón 721

722 Resultados de los problemas
13.19. a) ω km
; 1k
1k1
1k2
...
b) ω km
; k k1 k2 ...
c) ídem
13.20. a) k2=2k b) k3=3k
c) k1
n 1n
k k2 (n 1) k
13.21. a) b)k3mg
hν 1
2π3gh
13.22. ωk(h l0)
mh
T0
mh
13.23. a) 28.8 Hz b) 30.5 Hz
13.24. 9.814 m/s2 13.25. 1.96 s
13.26. adelanta 2 min 44 s diarios
13.27. 14.8° 13.28. 48.6 m/s
13.29. a) b) en el fondoθ gl
sen θ 0
13.30. a)
b)
Prob. 13.30, 13.30.....a)
T 2bm
Ep,0
c) T⎛⎜⎜⎝
⎞⎟⎟⎠
1 2 33
bm
Ep,0
13.31. s/c
13.32. a) 1.10 Hz b) ν a 2
2πb mb
13.33. ω72Ep,0
mr20
13.34. a) s/c b) T 2π bg
13.35. x=a(φ-senφ); y=a(1-cosφ)
13.36. a) b) s/cT 2π 4ag
13.37. s/c
14.- Oscilacionesamortiguadas y forzadas.
14.1. s/c 14.2. s/c
14.3. a) s/c
b)<E> 1
2mω 2
0A20 e 2β t
<P> 2β <E>
14.4. s/c
14.5. a) b) 1.995 cmx 5 e 9t sen 12tc) 0.870 s
14.6. a) 0.28 s; 0.45 J b) 0.018 kg/s
14.7. a) 0.0277 s-1; 0.1109 kg/s; 18.03 sb) 1.59 Hz; 0.628 s c) 1.59 Hz;0.628 s d) 12.5 s e) 83.05 s; 3 cm
14.8. a) 19.6 mJ b) 366.5; 0.196 mJ
14.9. 49.1; 2411
14.10. no influye en el periodo; amortiguala amplitud; T=2.01 s;β=3.59×10-5 s-1; τA=7h 44.5min
14.11. 3.60; 0.87
14.12. a) 0.205 g/s; 5.13×10-3; 612.5b) 1.03%
14.13. s/c
14.14. a) 1.32 s-1; 3.14×10-3; 0.758 s b) 318
14.15. 38
14.16. a) 2393 b) 0.5 s c) las graves
14.17. 333 ms, 7.36 cm
14.18. si; tc=83 ms, vc=-37.4 cm/s;tm=417 ms, xm=-12.46 cm
Resultados de los problemas 723
14.19. 275 ms, 5.07 cm
14.20. a) 9.608×10-7A2 J b) 4.23×107
c) 7.78 ns; 4.67×106 osc.
14.21. a) 24 298 N/m; 5400 kg/s b) si;32.2 cm c) 0.95 s d) 6 cm
14.22. a) 17 775 kg/s b) 83 ms
14.23. a) 5.35 cm; 105.52° b) 4.29 Hz;6.03 cm
14.24. a) 4.6 cm; 2.1 s b) 0.25 J c) 0 Wd) 32.3 cm; 0.39 s; 25 J; 0 W
14.25. 0.1 cm; φ=-90°
14.26. k « mω2/4
14.27. a) 2.03 Hz b) 20 mm c) 42 mW
14.28. a) 1.33 mm b) 0.74 mW
14.29. a) infra b) 132.2 g/s, 72.4°c) 3.0 cm/s d) 0.2 cm, 162.4°
e)
Prob. 13.29, 14.29.....e)
14.30. k=k1+k2; γ=γ1+γ2; β=γ/2m;ω0
2=k/m
14.31. a) 7.52 cm b) 0.17 cm
14.32. a) 7.52 cm b) 0.17 cm
14.33. a) ω ≈ ω 0
13
km
tgϕ γ ωk
b) Ares B 1 ⎛⎜⎝
⎞⎟⎠
9mk
γ 2con 9mk
γ 20.25
c) F (k mω 20) B sen ω 0t γ ω 0 B cos ω 0t
Ares [ k cos(ω 0t ϕ ) γ ω 0 sen(ω 0t ϕ ) ]
14.34.
Aγ ω B
(k mω 2)2 γ 2ω 2
tgδ γ ωk mω 2
14.35. a) 2.46×104 N/m b) 274 N
14.36. a) 9.1 Hz b) ∞ c) 6.7% d) 1.6%
14.37. 4 mm; 50.3 mm/s; 632 mm/s2
14.38.
a)A
(k2 mω 2) F0
(k1 k2 Mω 2) (k2 mω 2) k 22
Bk2 F0
(k1 k2 Mω 2) (k2 mω 2) k 22
b) k2 mω 2 ;k1
M≈
k2
m
14.39. m=5.06 kg; k2=0.203k1
14.40. 6.37 Hz; 15.7
14.41. 12.5
15.- Superposición de movi-mientos armónicos simples.
15.1. a)x
3c1
2mω 20
cosω 0t
17 c3
34mω 2O
sen (3ω 0t 2.897)
b) c3/c1=12.37
15.2.
a)x
10
10mω 20
[ 4a1 sen ( 12
ω 0t 0.322)
a2 sen(2ω 0t 2.820) ]
b) 0.25 c) 16 d) 1; 0.25
15.3.
a)F(t) 4h
π...
⎞⎟⎠
senω t13
sen3ω t15
sen5ω t ...
b) i) 1.000; 0.704; 0.326; 0.064; ...ii) 0.521; 0.259; 1.000; 0.074; ...
15.4.
a)F(t) 1
π12
senω t2π
...
⎤⎥⎦
13
cos2ω t115
cos4ω t135
cos6ω t ...
b) 1.000; 0.525; 0.398; 0.0265; 0.0063
724 Resultados de los problemas
15.5.
a)F(t) 2
π4
3πcos2ω t ...
⎤⎥⎦
1215
cos4ω t1235
cos6ω t1263
cos8ω t ...
b) i) 1.000; 0.040; 0.0074; 0.0023;...ii) 1.000; 0.318; 0.762; 0.054;...
15.6. a) 6.94; 38.58° b) 5.00; 98.13°c) 7.00; 60.00°
15.7. 7.47; 57.94°
15.8. a) π rad/s; 2 s b) π rad/s; 2 s c) in-conmensurables d) 2π rad/s; 1 s.
15.9. a) 0.5 s; 2 Hz b) 3.5 c) vide Fig.
Prob. 15.9.....c)
15.10. a)
⎧⎨⎩
x 2sen3t 4cos3ty sen5t 2cos5t
⎧⎨⎩
x 6cos3t 12sen3ty 5cos5t 10sen5t
b) Ax=2√5; Ay=√5 si; 2π c) vide Fig.
Prob. 15.10, 15.10.....c)
15.11. a)
Prob. 15.11, 15.11.....d)
⎧⎪⎪⎨⎪⎪⎩
x822
sen( 2 2 t 1.083)
y 5 sen( 5t 1.107)
⎧⎪⎨⎪⎩
x 2 41 cos( 2 2 t 1.083)
y 5 5 cos( 5t 1.107)
b) Ax=9.06; Ay=2.24 c) no d) vide Fig.
15.12. s/c 15.13. s/c
15.14. 15.15. s/cy2B
A 2x 2 B
15.16. a) nx:ny:nz, naturalesb) T=nxTx=nyTy=nzTz
16.- Geometría de masas.
16.1. (1.0 1.7 1.7) 16.2. s/c 16.3. s/c
16.4. a) (senα/α)R b) (2√2/π)Rc) (2/π)R
16.5. xcm=(πR2)/(πR+L);ycm=(2R2-L2/2)/(πR+L)
16.6. s/c
16.7. a) x 0 y23
senαα
R
b) x 0 y4 23π
R
c) x 0 y4
3πR
d) x 0 y4R3
sen3α2α sen 2α

Resultados de los problemas 725
e) x 0
y2R3
sen3α sen3β(α β ) sen(α β )cos(α β )
16.8. x 0 y35
H
16.9. x πa y56
a
16.10. x y256 a315 π
16.11. a) desde la basez14
H
b) z(R 4
2 R 41) 4 (R2 R1)R 3
1
4 (R2 R1)(R32 R 3
1)H
16.12. a 3H/4 de cada vértice, siendo H laaltura del tetraedro.
16.13. a) z3R4
sen4α[2 (2 sen2α) cos α]
b) z3R4
sen4α sen4β[(2 sen2α)cosα (2 sen2β )cosβ ]
c) d) e)z3R8
sen2α1 cosα
z38
R z38
R
16.14. 53.13° 16.15. z38
R 42 R 4
1
R 32 R 3
1
16.16. a) zR4
1 cos 2α1 cos α
b) zR4
cos 2α cos 2βcos α cos β
c) xπ4
sen αα
R
16.17. a) z = R/2 b) x=y=z= R/2
16.18. z = -R/14
16.19. 16.20. s/czπ4
a 3(4b 3a)
3b 3 2πa 3
16.21. a) b)14
m(R 21 R 2
2) 14
m(R 21 5R 2
2)
16.22. a) (1/2)mL2; (1/6)mL2 b) (1/18)mL2
c) (1/12)mL2
16.23. a) (2/3)mR2 b) (2/9)mR2 c) (11/9)mR2
d) (4/9)mR2 e) (13/9)mR2
16.24. s/c
16.25. a) (1/12)mL2sen2θ b) (1/3)mL2sen2θ
16.26. a) (27/50)mR2 b) (27/100)mR2
16.27. 1 687.50 g cm2
16.28. a) (1/6)ma2; (1/12)ma2 b) (1/12)ma2;(1/12)(2+√2/2)ma2 c) (1/3)ma2
d) (2/3)ma2 e) (1/9)ma2
16.29.
14
m
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
b 2 0 0
0 a 2 0
0 0 a 2 b 2
16.30. a) (1/6)ma2 b) (2/3)ma2 c) (1/6)ma2
16.31. a) 320
mR 2 35
mH2
b) 320
mR 2 110
mH2
16.32. a)
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
14 8 1
8 22/3 2
1 2 20
kg m2
b) 3.56 kg m2
16.33. a)
b)
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
A 0 0
0 B 0
0 0 C
17.- Sistemas de partículas.Leyes de conservación.
17.1. s/c 17.2. s/c
17.3. a) (7.78 5.77 0) cm/sb) (2.22 -5.77 0) cm/s;(-1.78 4.64 0) cm/s c) 24.7 g cm/sd) 560 erg; 137.8 erg
17.4. a) 1.67 2.00 0) cmb) (0 0 15.88) g cm2/s;(0 0 69.4) g cm2/s

726 Resultados de los problemas
17.5. a) Ep=½k(x-l0)2 b) Ek,1/Ek,2=m2/m1
17.6. a) (t2+t+1 t3+t-2 t3-5)b) (12t+6 6t 6t) c) (12 36t 36t);(0 36t 0); (-4 0 36t); (16 0 0); no
17.7. a)
(-24t3+216t2-24 12t4-72t3+48t 36t2 24)
(-72t2+432t 48t3-216t2+48 72t)
17.8. a)
(-24t3+144t2-36 12t4-108t3+108t2+192t+7236t-48t3-28t2-48t-16); (-72t4-72t2+144t
48t3-216t2+144t-48 -8t3-8t+16) b) no
17.9. (72 114 -60); (96 -126 72)
17.10. 264; no 17.11. 36; 300
17.12. a) ΔEk=½mv02cos2θ0 b) 32 107 m
17.13. a) 328.4 m/s; 57.43° b) 90 178×m kg(3m=masa granada) c) 0.00 m;9 470 m; 2 370 m
17.14. 3.33 cm
17.15. a) s2m
M ml
b) VmM
2MglM m
; v2MglM m
17.16. vb=1.5 m/s; t=0.1 s; Vbast=1.0 m/s;t=0.28 s; Vbast=0; despl. basti-dor=18 cm (dcha); CM estacionario
17.17. acm
⎛⎜⎜⎝
⎞⎟⎟⎠
m1 m2
m1 m2
2
g
17.18. V2m 2gh cos2θ
(M m) (M m sen2θ)
vabs
2 (M m)gh
M m sen2θ
17.19. a) 1 m/s b) 1.57×105 m/s2;3.13×102 m/s2 c) 3.19 msd) 1.57×103 N
18.- Sistemas de masavariable.
El problema de 2-cuerpos.
18.1. 3.27 km/h
18.2. a) 0.753+1.667t g b) 500.753 g
18.3. 300 disparos/min
18.4. a) 3.44 m/s b) 24 N
18.5. a) αv b) αv2 c) s/c
18.6. a) s/c b) vf 0.598v0 0.296m0g
α
18.7. 0; 0.09 CV
18.8. a)m m 2
0 2km0v0t
xm m0
kv
m0
mv0
b)
ΔEk
12
m0v20
⎛⎜⎜⎝
⎞⎟⎟⎠
m0
m1
12
m0v20
⎛⎜⎜⎝
⎞⎟⎟⎠
kxm0 kx
< 0
18.9. xg2
⎡⎢⎢⎣
⎤⎥⎥⎦
12
t 2m0
αt
m 20
α2ln
⎛⎜⎜⎝
⎞⎟⎟⎠
1 αm0
t
18.10. a) s/c b) s/c
18.11. a) vαwk
⎡⎢⎢⎢⎣
⎤⎥⎥⎥⎦
1⎛⎜⎜⎝
⎞⎟⎟⎠
m0 αt
m0
k/α
b) vf
αwk
⎡⎢⎢⎢⎣
⎤⎥⎥⎥⎦
1⎛⎜⎜⎝
⎞⎟⎟⎠
mcoh
m0
k/α
18.12. a) 61.25 kg/s b) 245 kg/s
18.13. a) 188 km/h; 1.908 km b) 25.192 km
18.14. a) 1269 km/h b) 2287 km/hc) 1494 km/h
18.15. 18.9 kN; 2835 kW
18.16. a) Papl
MvL
(gx v 2)
b) Pdis
M2L
v 3

Resultados de los problemas 727
18.17. a) xv dv [ v 2 (x L) g ] dx 0
b) vL gL/3
c)W MgL ΔEk
MgL6
ΔEp
MgL2
ΔE2MgL
3; no
18.18. a) 14×106 m/s; 0.24×106 m/sb) 0.7 MeV c) energía de enlacenuclear
18.19. mM m
(a b) 5 cm
18.20. 258.3 d 18.21. 210.9 d 18.22.1.059 Å
18.23. a) ω 3k2m
b)E
12
kD 2 ; E1
23
E ; E2
13
E
c)A1
23
D ; A2
13
D ;
v1,máx
23ωD ; v2,máx
13ωD
18.24. 18.25. s/cm2kR
g
18.26. a) v1
m1 m2
m1 m2
v0 ; v2
2m1
m1 m2
v0
b) vcm
m1
m1 m2
v0 ; ω(m1 m2)k
m1m2
c)
x1 vcmtm2
m1 m2
⎛⎜⎜⎝
⎞⎟⎟⎠
l0
v0
ωsen ω t
x2 vcmtm1
m1 m2
⎛⎜⎜⎝
⎞⎟⎟⎠
l0
v0
ωsen ω t
18.27. a) El c.m. adquiere velocidad a ex-pensas del impulso proporcionadopor la pared. b) x1=l0; v1
2(0)=kD2/mc) vcm
2=kD2/16m d) ω2=4k/3m
A32
D ; A1
34
A ; A2
14
A
18.28. a) 558 N/mb) Ed=4.52 eV; W=4.35 eV
18.29. a) 1829 N/mb) Ed=11.13 eV; W=14.3 eV
18.30. a) vide Fig.
b) energía disociación c) k=2aD
d) a=3.367×1020 m-2; D=7.163×10-19 J= 4.47 eV
18.31. s/c
Prob. 18.30, 18.30.....a)
19.- Colisiones.
19.1. a) 10.8 N s b) 10.8×103 N; 7347
19.2. a) s/c b) s/c
19.3. a) 0.9 b) 19% c) 22 d) 27.14 s;95.26 m
19.4. a) tramos parabólicos de altura de-creciente b) A2=eA1
c) Atot
v 20 sen 2θ0
(1 e) g
19.5. a) 0.71 b) 50.2 m/s
19.6. h′⎛⎜⎜⎝
⎞⎟⎟⎠
m1
m1 m2
2
h
19.7. a) h1′=h/9; h2′=4h/9 b) h1″=h; h2″=0(en reposo).
19.8. a) 3 choques; -6v0/27; 7v0/27; 10v0/27b) si.
19.9. γ=0.4142, m1/m2=0.1716;γ=-2.4142, m1/m2=5.8284
19.10. a) 7.106 m b) -7.106

728 Resultados de los problemas
19.11. a) s/c b) s/c c) 0.277m0; 1.883v0;0.984Ek,0 d) 1.566v0; 0.680Ek,0
19.12. s/c
19.13. a) vM m
m2gh 266.5 m/s
b)ΔEk
Ek
MM m
99,7%
19.14. a) 147.89 m/s b) 98.8%
19.15. a) s/c b) ΔEk,2/Ek,1=e
19.16. a) 5.77 m/s, 90°; 5.77 m/s, 30°b) 5.29 m/s, 79.11°; 5.19 m/s, 30°c) 5.29 m/s, 79.11°; 5.19 m/s, 30°
19.17.
⎧⎪⎨⎪⎩
v′1ξ(m1 em2)v1 (1 e)m2v2
m1 m2
cos β
v′1ν v1 sen β⎧⎪⎨⎪⎩
v′2ξ(1 e)m1v1 (m2 em1)v2
m1 m2
cos β
v′2ν v2 sen β
tgθ1
(m1 m2) v1
(m1 em2)v1 (1 e)m2v2
tg β
tgθ2
(m1 m2) v2
(1 e)m1v1 (m2 em1)v2
tg β
θ1=θ*1-β; θ2=β-∂*
2
19.18. 3.27 m/s, 12.83°; 5.86 m/s, 7.12°
19.19. a) 6.506 cm/s, 117.5°; 3.512 cm/s,55.3° b) 5.568 cm/s, 111°;3.000 cm/s, 60° c) 27% d) s/c
19.20. s/c 19.21. a) 28.4% b) 21
19.22. 141°
19.23. 1 m/s; 180°; 3.46 m/s; 30°
19.24. s/c
19.25. a) 1.03 m/s, 46.94° b) no
19.26. a) 14.5° b) 0.03°
19.27. a) 7.49 b) no; 4%; e=0.838
19.28. a) vp
2 mn
mn mp
vn
b) mn
mNvN mpvp
vp vN
1.15 u
19.29. 14.076 u; 4.45%
19.30. 3.864 19.31. s/c
19.32. a) 7.24 g; 28.68°; 26.7 m/sb) θ1,máx=46.37°
19.33. a) m1/m2=4 b) 100 m/s; 61.2 m/sc) 80 m/s d) 20 m/s; 80 m/s; 45°
19.34. a) 14.48°; 104.48° b) 37.76° c) S.L.:77.46 m/s, 126.51 m/s; S.C.M.:20 m/s, 80 m/s d) vide Fig.
Prob. 19.34.....d)
19.35. a) s/c b) 3, 4, 5 y 6
19.36. a) s/c b) s/c 19.37. el cuádruple
19.38. s/c 19.39. 6.72 MeV; 13.44 MeV
19.40. 6.15 eV
19.41. a) 2.354 MeV b) 4.362 MeVc) 3.038 MeV d) 0 (exoenergética)
19.42. a) -4.082 MeV (exoenergética)b) 4.011 MeV; 70 keVc) 173 MeV/c; 173 MeV/c;1.39×107m/s; 2.4×105m/s
20.- Estática del sólido rígido.
20.1. s/c 20.2. s/c
20.3. a) 882 N b) 1.33 m
20.4. deslizamiento
20.5. acelerando: a0=g/2 (vuelco); frenan-do: a0′=g/4 (vuelco), a0″=µg (desliz.)
20.6. a) desliza; 26.6°; 31.0° b) ?; 31.0°;31.0° c) vuelca; 35.0°; 31.0°
20.7. α=90°-2θ; mg cosθ; mg senθ
20.8. 14.6 kg; 10.4 kg
Resultados de los problemas 729
20.9. (-150 0) N; (+180 +52) N;(-30 -52) N
20.10. FA=(240, 297) kg; FB= 379 kg;12 m kg
20.11. a) 30 kg b) 1203 senθ 4 cosθ
kg
c) 36.87°; 24 kg
20.12. a) FA=(+16.2, -19.2) N;FB=(-13.2, 0) N b) 94.5 r.p.m.
20.13. µ=0.34; para θ: (pie) vert. 8.38 kg,horz. 2.81 kg; (rodillo) 3.25 kg
20.14. cos3θ=2a/l; RA=Ptgθ; RB=P/cosθ
20.15. a) 6.46 m b) 76.18°
20.16. a) vert. (30±12h) kg, horz.(12±4.8h) kg; b) 2.50 m
20.17. a) s/c
b) l2
( 1 12
13
...) ; diverge
20.18. 15.82° 20.19. h=R√3
20.20. 20.21. 1.242mF7mg9π
tg θ
20.22. a) NA=0; NC=mg b) tgθ=2m/M
20.23. a) θmáx=8.13° b) µ>0.143
20.24. a) 23.1 kg b) 34.6 kg; 11.6 kg
20.25. A (0, 2.707)λlg; B (2.707, 2.707)λlg;C (2.707, 2)λlg
20.26. a) 42.88° b) N1=12.4 kg; N2=8.8 kg;N12=8.5 kg
20.27. M≥2m/3
20.28. θ1=67.79°; T1=2.65 kg;θ2=10.67°; T2=13.23 kg
20.29. 0.268
20.30. θ=13.3°; β=24.2°; 9.92 kg a 42.7°
20.31. a) 67.4 kg; 151.2 kg a 69.5°b) 2763 kg; 4382 kg a 60.3°
20.32. m1=2m2 20.33. 6.3°
20.34. tgθ=P/2F 20.35. tgθ=P/2F
20.36. senθ=mg/kR
20.37. a) b) √3mg; 2mg;h 1.072 mM
r
mg tg60°cos θ
; tgθ M m
3 m
20.38. a) θ1=0; senθ2=(h-l)/lb) 3mg/2; mg/2; mg/2
20.39. a) 73.90° b) 52 g; 30 g
20.40. 11.3°; 18.4°; 45°
20.41. a) s/c b) tg θ0
FMg
20.42. 30° estable; 57.7° inestable
20.43. 21.03° inestable; 50.5° estable
20.44. ka b
b 2mg
20.45. a) 3tgθ1=tgθ2; senθ1+senθ2=D/lb) 36.17°; 65.49°
20.46. ; 63.74°sen2θ tg θ2
2rl
20.47. a) 30.6°; 49.8°; 116 kg; 59 kg
20.48.senθ eq
θ eq
2kr 2
mgl
20.49. cosα+cosθ=1; tgα=2tgθ;α=68.1°; β=51.2°
20.50.F
l2h
mg sen2θ cosθ
RB
l2h
mg senθ cosθ
RA
⎛⎜⎝
⎞⎟⎠
l2h
senθ cos2θ 1 mg
20.51. a) 2 m; 4 m; 8 m b) TAA′=30 000 kg;TAB=31 623 kg; TBC=36 056 kg;TC=42 426 kg
21.- Dinámica del sólidorígido.
21.1. I1=60ma2; I2=50.25ma2; I3=9.75ma2;e1=(1 0 0); e2=(0 0.283 0.959);e3=(0 -0.959 0.283)

730 Resultados de los problemas
21.2. a) ; noL 112
ml 2ω 0 senθ 0
b) ; noL 13
ml 2ω 0 senθ 0
21.3. a) II 112
ml 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
1 0 0
0 1 0
0 0 2
b) J1=1; J2=1; J3=2 c) e1=(m n 0);e2=(-n m 0); e3=(0 0 1); con m2+n2=1
21.4.
I1
112
m [2(a 2 b 2) 4(a 4 b 4) a 2b 2 ]
I2
112
m [2(a 2 b 2) 4(a 4 b 4) a 2b 2 ]
I3
13
m (a 2 b 2)
⎛⎜⎜⎝
⎞⎟⎟⎠
2(a 2 b 2) 4(a 4 b 4) a 2b 2
3ab1 0
⎛⎜⎜⎝
⎞⎟⎟⎠
2(a 2 b 2) 4(a 4 b 4) a 2b 2
3ab1 0
0 0 1
21.5. a) II 112
ma 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
1 1 0
1 2 0
0 0 4
b)I1
112
ma 2 e1
1
21 1 0
I2
14
ma 2 e2
1
21 1 0
I3
13
ma 2 e3 0 0 1
21.6. a) II 112
ma 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
8 3 3
3 8 3
3 3 8
b) L 112
ma 2ω 3 3 8
c)I1
16
ma 2 e1
1
31 1 1
I2
1112
ma 2 e2
1
21 1 0
I3
1112
ma 2 e3
1
61 1 2
21.7. a) 65.33 rad/s2 b) 39.2 rad/s2;3.92 m/s2; 29.4 N c) inercia de lapesa.
21.8. a) 4.2 m/s2; 42 rad/s2; 56 Nb) 3.92 m/s2; 39.2 rad/s2; 58.8 N;54.9 N
21.9. a) mB desciende b) 4.69 rad/s2;0.234 m/s2; 0.375 m/s2 c) 301.0 N;188.5 N
21.10. 0.67 m/s2; 73.03 N; 72.69 N
21.11. ω 2mM 2m
vR
θ 2π 2mM 2m
21.12. a) ν 12π
g2R
λ 2R
b) igual
21.13. a) b)2π 3R2g
2π 5R4g
21.14. a) b)2π 5 3 a12g
2π 2D3g
21.15. a) 2π 2R 2 5L 2
5Lg
b) c) 0.022⎛⎜⎜⎝
⎞⎟⎟⎠
TT0
2
1 25⎛⎜⎝
⎞⎟⎠
RL
2
21.16. a) b) x=2L/32π 23g
⎛⎜⎝
⎞⎟⎠
L 2 3x 2
L 2x
c) 2π 0.527Lg
; x 0.264L
21.17.
λ1 2 cos2 θ
2
3 cos θ2
R ;
si θ 120° →λ R

Resultados de los problemas 731
21.18. a) b)α 3pb2m
ω 3pbm
c) tπ2
4m3pb
21.19. a) b)1K
2a0bπK
2a0b
21.20.
trasl.: ycm Kycm 0 m.a.s. ω K
rot.: θ K2
sen 2θ 0 osc.
si sen2θ≈2θ :
θ Kθ 0 m.a.s. ω K
21.21. a) ω ω 0
2M
2M 5m sen2φb) s/c
21.22. mL2ω 2 sen2θ24h
21.23. a) L 112
mabω
a 2 b 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
b
a
0
b) no; si c) Fmab (a 2 b 2) ω 2
12L (a 2 b 2)
21.24. 2979 rpm 21.25. 29.79 rpm
21.26. a) 2.5 kg b) 4.77 kg; 0.23 kgc) (2.83 kg) d) 6.62 rpm
21.27. 245.4 m N 21.28. s/c
21.29. 2.02 × 1022 m N
21.30. 1.94 rps 21.31. 974.42 cm/s2
21.32. a) (2/3)gsenθ b) (1/3)mgsenθc) µ0=(1/3)tgθ d) µ=0, desliza; µ<µ0,rueda y desli.; µ=µ0, rodadura crítica;µ>µ0, rodadura e) solo si µ≥µ0
21.33. a) (5/7)gsenθ b) (2/7)mgsenθc) µ0=(2/7)tgθ d) µ=0, desliza; µ<µ0,rueda y desli.; µ=µ0, rodadura crítica;µ>µ0, rodadura e) solo si µ≥µ0
21.34. a) v0/ω0=2R/3; x=v02/2µg
b) v0/ω0=R/3; x=v02/2µg
21.35. a) α 5g14r
b) c) µs≥0.16N32
mg ; f17
mg
21.36. a) 1.37 rad/s; 27.4 cm/sb) ω2=1.87+8.57senθc) θmáx=192.65°
21.37. acm
hFmr
µ ⎛⎜⎝
⎞⎟⎠
1 hr
Fmg
21.38. a) 7.35 m/s2 b) 20.6 N
21.39. a) a0
7 F7M 2m
acm
27
a0
b) α 57
a0
r
21.40. a) mov. unif. acelerado; inercia
b) a ± 2r 2
R 2 2r 2g T
R 2
R 2 2r 2Mg
21.41. avanza; se enrrolla el hilo
acm
23
Fm
⎛⎜⎝
⎞⎟⎠
1 rR
>0 αacm
R
21.42.
a)T
MmM 3m
g ab
MM 3m
g
acm
M 2mM 3m
g α 2mM 3m
gR
b) m→0; T→0; ab→g; acm→g; α→0
c) m→∞; T→Mg/3; ab→0; acm→2g/3;α→(2/3)(g/R)
21.43. a) 3.27 m/s2; 130.67 rad/s; 3.27 Nb) 0.78 s
21.44. T15
mg α 25
gR
acm
45
g
22.- Trabajo y energía en elmovimiento general del sólido
rígido.
22.1. a)ω 2 6(2r l)
2R 2 5r 2g
vA ωr vB ωR

732 Resultados de los problemas
b) vA vB (R 3r) g
22.2. ω 3g(1 cosθ)L
v 3gL
22.3. a) θ 3g2l
sen θ
b) θ2 3gl
(cos θ0 cos θ )
c) cos θ 23
cos θ0
22.4. 10.63 rad/s
22.5. a) ω 6g senθ(1 3cos2θ) l
Ω ω
b) vB=2lωcosθ
22.6. a) 3112
mr2
b) ω 24( 2 1)g31 r
1.77
r
22.7. a) 20.94 N; 60 vueltas b) s/c
22.8. 20 rad/s; 2 kJ
22.9. a) ω ML 2 6md 2
ML 2 6mL2ω 0 <ω 0
b)Ek,0
Ek,f
ω 0
ω> 1
22.10. a) 23.76 rad/s b) 92.16 rad/sc) 363 N d) 7.2 J
22.11. a) esfera, cilindro y aro b) no c) lainercia de rotación
22.12. plano inclinado; baja antes la maciza.
22.13. 22.14.ω 2kM 2m
ω 8k3m
22.15. T 2π m6k
22.16. ω 3g2l
6kh 2
ml 2
22.17.
a) b)sen θ0
mg (4kl mg)2kl
; con 2kl>mg
ω 3km
sen θ0
22.18.ω′ ω 2
0 β 2
β b 2γ2m(L a)2
ω 0
aL a
gl
2a 2
km
22.19. a) 32
Mx γ x kx F0 sen ω t
b) s/c
22.20. a) 2 rad/s; 2 cm; 1.87 rad/s; 2.1 cmb) 60 mW; 56 mW
22.21. a) b)ω 2l
3gR ω 6(2R h)g
l 2 4h 2
22.22. 53.97°; v0
10(R r)g17
22.23. 50.6 cm
22.24.
a)θ 5g
7(R r)senθ 0
si senθ ≈θ ⇒ θ 5g7(R r)
θ 0
b) T 2π 7(R r)5g
λ 7(R r)5
22.25. a) b) 31.63°;vm
27(R r)g7
v (R r) g sen 31.63°
22.26. a) ω 3( 2 1)g2l
b) ω 12( 2 1)g5l
22.27. 55.2°; θ0 4g/7r
22.28. a) 85.20 cm/s; 42.60 rad/sb) 198.80 cm/s; 19.88 rad/s c) -77 J

Resultados de los problemas 733
22.29. a)a0
2mg senθ cosθ3(M m) 2m cos2θ
ax
2Mg senθ cosθ3(M m) 2m cos2θ
ay
2(M m)g sen2θ3(M m) 2m cos2θ
b) vf a0 th con th
2hay
22.30.ω 2 8 M 2
6M 2 5Mm m 2
⎛⎜⎝
⎞⎟⎠
R r
r 2g
Ω2 2 m 2
6M 2 5Mm m 2
⎛⎜⎝
⎞⎟⎠
R r
R 2g
vc2 8 M 2 8Mm 2m 2
6M 2 5Mm m 2R r g
23.- Ecuaciones de Euler.
23.1. Meje=Iejeω 23.2. T 2πI0
mgl
23.3. a) ml2ω2sen2φ b) (ml2ω2sen2φ)/D
23.4. a) L 112
mabω
a 2 b 2
⎛⎜⎜⎜⎜⎝
⎞⎟⎟⎟⎟⎠
b
a
0
b) no; si c) M mab (a 2 b 2) ω 2
12 (a 2 b 2)e3
23.5. (mR2ω2sen2φ)/8 23.6. s/c
23.7. ω 3g tgθ3b 2l sen θ
23.8. L (ω×e3)=0 23.9. s/c
23.10. a) 3.295 Hz b) 4.297 Hz
23.11. N mgΩ 2
RI
23.12. a) s/c b) 12
⎛⎜⎝
⎞⎟⎠
± a 2
3bΩω g m senθ
c) ωosc=Ω
23.13. F 0 mΩ2R mg
M ⎛⎜⎝
⎞⎟⎠
12
mlRΩ2 0 0
23.14. a) s/c b) equilibrio estáticoc) 63.4°<β<67.5°
23.15. s/c 23.16. s/c
23.17.
a) ω1=ωsenβ cosΩt=86.6cos50t rad/s;ω1=ωsenβ senΩt=86.6sen50t rad/s;ω1=ωcosβ=50 rad/s b) Ω=ωcosβ=50 rad/sc) A=ωsenβ=86.6 rad/s d) s/c;1.06×106 g cm2/s; 5.00×107 erg e) s/c;α=19.1° f) s/c; γ=40.9°
24.- Dinámica impulsiva delsólido rígido.
24.1. 4.5×10-3 kg m2 24.2. 4mh2
24.3. a) 0.60 cm debajo del c.m.
b) vide Fig.
24.4. a) cant. mov., momento ang. y energ.
Prob. 24.3, 24.3.....b)
cinética b) mML 2
L 2 12h 2
c) vcm
L 2
L 2 12h 2v0 ω 12h
L 2 12h 2v0
d) e) conjugadosh′ L 2
12h
24.5.
a) ω 6ml
3ml 2 ML 2v0 v
3ml 2 ML 2
3ml 2 ML 2v0
b) Πeje
ML (3l 2L)
3ml 2 ML 2mv0 l
23
L
24.6.

734 Resultados de los problemas
a) ω 3 (1 e) ml
3ml 2 ML 2v0 v
3ml 2 eML 2
3ml 2 ML 2v0
b) Πeje
1
2(1 e)ML (3l 2L)
3ml 2 ML 2mv0 ; l
23
L
24.7. a)ω
12mcosθ0
(4M 3m)
vo
L
v v0 148Mm cos2θ0
(4M 3m)2
sen θsen θ0
148Mm cos2θ0
(4M 3m)2
24.8.
a) ω6m cos θ0
4M 3m
v0
Lv
3m cos θ0
4M 3mv0
b) Πx
Mm4M 3m
v0cosθ0 Πy mv0 sen θ0
24.9.ω 0 vcm
2mv0cosθ0
M m
v v0 14Mmcos2θ0
(M m)2
sen θsenθ0
14Mmcos2θ0
(M m)2
24.10.
a) v′ 17
( v 2lω ) ω′ 17
( ω 24vl
)
b) Π 17
( 8mv 2mlω )
24.11. x33
l
24.12. v34
2gh ω 32l
2gh
Π 14
m 2gh
24.13. v′cm=vcm=ωl/2; ω′=ω
24.14. a) b)ω 0
3v4l
v 2mín
83
( 2 1) gl
24.15.
a)xcm
v3
(1 2cosφ ) θ v3r
(1 2cosφ )
Πx
13
mv (1 cosφ ) Πy mvsenφ
b) ghv 2
12⎛⎜⎝
⎞⎟⎠
1 2rr h
2
24.16. a) s/c b) s/c c) s/c d) s/c
24.17. ; no hay efecto de reboteh75
R
24.18. a) ω 0
5v0
3r
b) v521
v0 ω 521
v0
r
24.19. a) s/c b) tg φ 2
21
Ωω
24.20. s/c
24.21. v′0 0 vcm
v0
2ω
v0
2a
24.22. a) vA=-v0/3; vB=vC=2v0/3
b) c) noΠcomp
2 23
mv0 ; Πreac
23
mv0
24.23. 82.8°; no
24.24. ω′1ω 1 µρω 2
1 µω′2
ω′1ρ
24.25. vf
57
v0 ω 57
v0
R
24.26. a) ω 12
3gl
v12
3gl
b) Πeje
m4
3gl
24.27.
a) ω 1 3e4
3gl
v1 e
43gl
b) Πeje
(1 e)m8
3gl
24.28.
a) ω A
ω 0
3ω B
ω 0
3ω 0
3gl

Resultados de los problemas 735
b) ΠA
1118
mlω 0 ΠB
109
mlω 0
24.29. a) v0
Πm
ω 0
rIΠ
b) v ω R ω R r
I mR 2Π
24.30.ω 5
7
v0
Rvcm
57
v03
ΠB
2M 7m7
v0 Πesf
27
Mv0
24.31. a) vcm
Π2M m
ω 6 Πml
b) Πeje
2M2M m
Π

736 Resultados de los problemas

B.- Índice alfabético
absorbente 428absorción 397, 412, 422, 423, 428, 438absorción de potencia 397, 412, 422,
423, 438absorción dinámica 428aceleración angular 588, 631, 632, 648,
649, 651, 652, 662, 665, 673aceleración del centro de masa 497, 516,
651, 665aceleración relativa 527aceleración tangencial 386aceleradores de partículas 582agua pesada 565agudeza de la resonancia 423amortiguamiento 397, 398, 400-407,
410, 411-418, 420, 421, 423,424, 425-428, 431, 436-438,452, 675
amortiguamiento crítico 397, 405-407amortiguamiento débil 397, 400, 431amplitud modulada 444amplitudes relativas 437anarmonicidad 378ancho de banda 423anchura de la resonancia 422, 428ángulo de difusión 560ángulo de dispersión 554, 557, 558, 568,
570, 571, 582ángulo de fase 411, 439, 440, 453ángulo de retroceso 568, 571, 573, 580,
582ángulo de rozamiento 604ángulos directores 463área de contacto 663areolar 448armónicos 361, 392, 429, 432, 437-439,
453, 693, 723Arquímedes 464astrofísica 507atmósfera 520átomo de Hidrógeno 507, 529, 530átomo de positronio 529, 539Atwood 648axial 470
balance energético en las colisiones 541,560
balanza 536base vectorial 549, 550, 680batimientos 443brújula giroscópica 646, 695cálculo diferencial 458, 461calidad del ajuste 423campo conservativo 375campo de fuerzas 444, 512, 515, 525,
534, 541, 684campo de fuerzas centrales 444, 534campo gravitatorio 381, 523, 536, 592,
593, 594, 632campo gravitatorio uniforme 381, 593cantidad de movimiento 489, 491-498,
504-506, 508, 509, 514, 515,519-522, 530, 531, 541, 543,544, 548, 551-554, 557, 562,566-568, 576, 582, 620, 626,638, 641, 642, 698, 699, 712,718
cantidad de movimiento del sólido rígido620
cantidad de movimiento interna 498, 505carga eléctrica 494, 526, 529Carnot 697, 712-714
Lazare Carnot (1753-1823) 713celeridad 580, 582, 650centro centrífugo 602centro de fuerzas 444, 445, 525-527, 529centro de gravedad 458, 587, 592-594,
599, 616, 618, 632, 634, 641,695
centro de masa 457-461, 464-468, 477,479, 480, 485, 486, 489, 495,496, 497, 498, 501, 505-507,509, 510, 513-516, 520, 522,525-527, 529, 530, 534-536,539-541, 549, 551, 552, 553,555-557, 559-562, 567, 569,570, 575, 579, 582, 588, 591,593, 594, 619, 620, 621, 625,626, 630, 632, 643-645,649-651, 656, 657, 661-663,665-667, 670, 672, 675, 679,
Manuel R. Ortega Girón 737

738 Apéndice B.- Índice alfabético.
682, 685, 688, 693, 696,698-702, 705, 706, 709,715, 716, 718
centro de oscilación 633-635, 701centro de percusión 634, 697, 700, 701,
703, 707centro de reducción 515, 591, 597, 631,
641, 666, 667, 699, 704, 705centro de simetría 464centro de suspensión 634, 635, 634, 635,
634, 635, 701centro instantáneo de rotación 716centroide 461, 465-467, 469, 470, 485Chadwick 581
James Chadwick (1891-1974) 581Chasles 620, 660choque 541, 545, 578, 579, 651, 700,
707, 708-710, 715-718choques 541, 727cicloidal 363, 387, 391, 395cicloide 391, 392, 395, 396, 467, 485ciclotrón 551cinemática del movimiento armónico
simple 363, 364cinemática del sólido rígido 655circunferencia matriz 369coeficiente de amortiguamiento 398,
424, 426coeficiente de elasticidad 547coeficiente de resistencia a la rodadura
664coeficiente de restitución 541, 545, 547,
548, 561, 563, 566, 577-581,697, 707-710, 715, 717, 718
coeficiente de rozamiento 393, 603, 612,613, 614, 615, 649, 651, 652,664, 665, 674, 682
coeficiente de rozamiento estático 393,612, 615, 651, 652
coeficiente de viscosidad 425coeficientes de Fourier 432-434, 437coeficientes de inercia 619, 621, 623,
627, 679, 680cohetes 519, 521, 522, 538, 674colisión frontal 545, 549, 555, 556, 561,
564, 578-580colisiones 455, 541-543, 545, 548, 549,
551, 554, 555, 559-568, 570,571, 573, 574, 576, 578, 580,581, 582, 697, 707, 727
colisiones elásticas 541, 565, 568, 570,571, 581, 582
colisiones frontales 541, 545, 554, 561,564
colisiones inelásticas 573colisiones oblicuas 541, 549, 555, 563
columpio 397, 415, 438combinación lineal 624componentes de la velocidad 623, 624,
626, 628, 699Compton 582conceptos físicos 489condición de equilibrio 382, 591, 592,
598, 603, 604, 607condición de rodadura 662, 665, 671,
672, 682condición estática de rigidez 589condiciones de Dirichlet 436condiciones de equilibrio 590-592, 596,
597, 598-600, 607, 610, 611condiciones iniciales 366, 370, 380, 392,
400, 405-407, 409-411, 424,431, 445, 491, 533, 566, 569,689
configuración de equilibrio 379, 608,615
conmensurables 442, 449, 450cono 484, 485, 487, 560, 614, 628, 651,
688, 689, 690, 696cono del cuerpo 688-690, 696cono del espacio 688-690, 696conservación de la energía 385, 489,
495, 504, 512-514, 519, 545,562, 568, 574, 655, 668, 700,711
conservación del momento angular 489,503, 504, 507, 515, 619, 636
constante de amortiguamiento 398, 416,420, 421, 424-428, 675
constante de fase 364-366, 368, 370,374, 453
constante de fuerza 370, 531constante de Planck 507, 582constante del movimiento 372, 375, 688constante elástica 370, 371, 380, 382,
383, 384, 393, 394, 416, 420,424, 425-427, 444, 515, 531,539, 540, 579, 617, 672, 675
contrafase 367, 411, 440, 447, 533convergencia de la serie de Fourier 436coordenadas cartesianas 445, 459, 461,
462, 471, 473, 474, 608coordenadas cilíndricas 462coordenadas curvilíneas 461, 474coordenadas del centro de masa 464,
477, 705coordenadas internas 498coordenadas libres 595, 596, 607, 609,
610, 611coordenadas polares 461-463, 469, 474coordenadas polares esféricas 463, 469coordenadas polares planas 462

Apéndice B.- Índice alfabético. 739
cosenos directores 479, 480, 628cuadratura 412, 441, 447, 448, 693cuantificación 507cuerda tensa 394curvatura 391, 395decremento de la amplitud 402decremento logarítmico 402, 424, 425densidad lineal 457, 460, 466, 472, 486,
601densidad superficial 457, 460, 486densidad volúmica 457, 460derivada temporal 499, 500, 638, 645,
672desfase 409-412, 421, 426-428, 431,
440, 446, 448, 449, 453, 454desfase entre la fuerza impulsora y la
velocidad 426desplazamiento real 604desplazamiento virtual 495, 587, 604,
605, 606, 712desplazamiento virtual reversible 606determinación del centro de masa 465deuterio 565diagrama para el sólido rígido libre 600diapasón 415diapasones 415, 444difusión 542, 554, 560, 568, 570dinámica de la partícula 489, 631dinámica de la velocidad continua 544,
699dinámica del sólido rígido 474, 585,
619, 628, 640, 729dinámica impulsiva 541, 543-546, 585,
697, 698-702, 705, 708, 709,712, 733
dinámica impulsiva de la partícula 541,543, 544
dinámica impulsiva del sólido rígido585, 697, 733
dinamómetro 393directriz 589Dirichlet 436disociación 540, 583, 727dispersión 542, 554, 557-559, 568-571,
582Eclíptica 647, 691ecuación de la trayectoria 447ecuación del movimiento 386, 400, 432,
491, 492, 493, 497, 526, 534,630, 641, 680, 706
ecuación del Q 541, 576, 577ecuación diferencial de segundo orden
429, 633ecuación fundamental de la dinámica
impulsiva 712ecuación secular 628
ecuación simbólica de la estática 607,608, 609
ecuaciones cardinales de la estática 587,590, 602
ecuaciones de Euler 585, 679, 683-685,694, 695, 733
ecuaciones de ligadura 595, 596ecuaciones del movimiento del sólido
rígido 679, 692ecuaciones diferenciales 400, 491, 532,
687, 692Ecuador 646, 647efecto de Compton 582Einstein 537, 574eje de precesión 640eje de rotación de la Tierra 647, 679,
690, 691eje de simetría 464, 468, 469, 476, 483,
487, 608, 625, 628, 639, 643,644, 650, 651, 677, 686, 688,689, 693-695
eje de suspensión 632-635, 649, 702,703, 711, 715
eje instantáneo de rotación 655-657,660, 661, 662, 688, 689, 691
eje instantáneo de rotación ydeslizamiento 655-657, 660
eje polar 690ejes libres 588, 691ejes principales de inercia 473, 476, 487,
588, 619, 626-630, 648, 658,683, 686, 693, 699, 704
elasticidad 547, 566, 596, 599electrón 426, 494, 507, 529, 530, 539,
575, 581, 582electrón-Voltio 575elemento de superficie 462, 469, 481elemento de volumen 462, 463, 484elipse 446, 447, 449, 453, 454, 534elipsoide de inercia 684elongación 364, 366-373, 379, 380, 382,
383, 384, 393, 401-403, 405,407, 409, 411, 412, 418, 419,424, 427, 437-439, 442, 452,453
energía cinética 370, 372, 384, 385, 393,399, 403, 415, 489, 508-510,512-516, 519, 523, 529, 530,536, 538, 542, 544, 545, 552,560-568, 573-583, 620,655-663, 667-671, 674, 676,686, 688, 689, 696, 708-711,713, 714
energía cinética de rotación 509, 510,655, 657-661, 686, 688
energía cinética de rotación del sólidorígido 660

740 Apéndice B.- Índice alfabético.
energía cinética de traslación 510, 573,574, 657, 660
energía cinética orbital 509energía de disociación 540, 583energía de enlace 540, 727energía de ionización 583energía de traslación 510energía de un sistema de partículas 513energía en el m.a.s. 363, 371energía interna 513, 514, 530, 562, 573,
574energía mecánica 519, 669energía potencial 370, 372, 375-380,
382, 383, 384, 388, 393-395,415, 453, 489, 510, 511, 512,513, 515, 530, 540, 573, 609,610, 668
energía potencial gravitatoria 388energía potencial interna 511-513, 515,
530, 540, 573, 668energía propia 513, 514energía total 372, 373, 375-378, 382,
388, 394, 395, 397, 401, 404,412, 424, 513, 514, 562, 573,574, 651, 668, 672
energía umbral 575, 576, 583entorno 380, 489equilibrio de la partícula 588equilibrio de rotación 588, 591, 592equilibrio de traslación 588, 591, 592equilibrio del sólido rígido 587, 588,
590, 597equilibrio estable 376, 378-380, 391, 617equilibrio inestable 676equinoccios 647, 651, 691espectro continuo 420, 438espectro de amplitudes relativas 437espectro discreto 438estabilidad de la rotación 679, 691estabilizador de dirección 644estado de equilibrio 589, 590, 604estado estacionario 397, 410-414, 417,
426, 431, 436, 437, 439, 452estado fundamental 539, 575estado transitorio 411estática de la partícula 587estática del sólido rígido 585, 587, 589,
596, 597, 600, 728estática del sólido rígido vinculado 597estrella Polar 647, 691Euler 388, 585, 619, 679, 683-685, 692,
694, 695, 733Leonhard Euler (1707-1783) 388,
684factor de calidad 397, 405, 404, 416,
417, 423, 425, 426, 428, 453
factor de potencia 413Faraday 365fase 364-370, 374, 387, 392, 411-413,
430, 439, 440, 442, 446, 447,449, 450, 453, 533
fase inicial 364, 387, 392, 439, 440,442, 453, 533
fasores 370, 422, 440, 441fenómenos físicos 514figuras de Lissajous 449, 454Física Atómica 504, 506Física Atómica y Nuclear 504, 506Física Nuclear 551, 575, 577fisión 565fluctuaciones 691foco 534fórmula de Larmor 425fotón 582Foucault 645, 646, 695
Jean Bernard León Foucault(1819-1868) 645
Fourier 429, 432-439, 452, 453frecuencia 364, 365, 368-371, 376-384,
392-395, 398, 400, 401,405-408, 410-420, 422, 423,424-428, 431, 432, 437, 438,439, 440, 444-447, 452, 453,454, 502, 503, 532, 539, 540,542, 551, 633, 649, 672, 673,674, 675, 688, 693-695
frecuencia angular 365, 368-370, 376,378, 379, 380, 382, 384, 400,401, 405-408, 412, 418, 426,427, 428, 431, 440, 503, 532,673, 688, 695
frecuencia de las oscilacionesamortiguadas 416
frecuencia fundamental 432, 437frecuencia natural 401, 410-417, 420,
424, 425, 427, 428, 437, 438,444, 452, 453, 675
frecuencias armónicas 432, 437frecuencias naturales 415Fresnel 363, 368, 440fricción 428, 516, 537, 579, 610, 614,
617, 618, 673, 716, 717fuerza atractiva 370, 540fuerza central 525fuerza centrífuga 418, 601, 602, 608fuerza centrípeta 534, 639fuerza conservativa 376, 453fuerza de inercia 503fuerza de ligadura 606fuerza de reacción 521, 643fuerza de rozamiento 398, 402, 407,
510, 651, 664, 665, 670, 671

Apéndice B.- Índice alfabético. 741
fuerza de tracción 664fuerza de van der Waals 540fuerza externa 397, 426, 493, 503, 506,
510, 521, 524, 525, 666fuerza impulsiva 397, 425, 438, 543,
544, 546, 698, 701fuerza impulsora periódica 428, 439fuerza interna 510fuerza repulsiva 540fuerza resultante 368, 490, 496, 497,
500, 520, 589, 606, 642, 643,667
fuerzas activas 596, 597, 600, 602, 606,608, 609
fuerzas aplicadas a un sólido rígido 587,589, 590
fuerzas centrales 444, 491, 525, 534fuerzas conservativas 610fuerzas coplanarias 611fuerzas de ligadura 596, 597, 600, 606fuerzas no conservativas 669fuerzas paralelas 598fuerzas vivas 508función arbitraria 377, 378función complementaria 408función en dientes de sierra 435, 436función impar 433-435función par 434, 435funciones armónicas 365, 371, 438funciones periódicas 435Galileo 387, 551galvanómetro 406, 486geometría de masas 455, 457, 707, 724giroscopio 619, 640, 643-647, 650, 679giróscopo 695grados de libertad 587, 591, 592, 594,
595, 596, 597, 599, 607, 609,610, 619, 620, 703, 704
Guldin 465, 469, 470Hertz 365
Heinrich Rudolph Hertz (1857-94)365
hielo 637Hiparco 647hipocicloide 485hipótesis 464, 494, 495, 504, 540, 693Hooke 370, 379, 380, 531, 534
Robert Hooke (1635-1703) 370Huygens 387, 391, 392, 395, 547, 549,
554, 619, 632, 635, 700, 708Christian HUYGENS (1629-1695)
387impedancia 397, 420, 421, 427impedancia de un oscilador 397, 420
impulsión 520, 543, 546, 670, 697, 698,718, 719
impulsión angular 697, 698integral de Fourier 438integral de línea 471, 473integral elíptica completa de primera
clase 390integral impropia 377integrales dobles 461intensidad del campo gravitatorio 523,
592, 593, 594intensidad del sonido 425, 444interacción mutua 515, 525, 542interferencia 440, 447interferencia constructiva 440interferencia destructiva 440Internacional 370invariante escalar 660, 661isocronismo 377, 387, 395isotropía 514Kater 635Kepler 534, 535Klein 640Kœnigs 626, 657, 661Lagrange 596, 600, 702, 705lámina plana 468, 475, 485, 486, 648Larmor 425latitud 646, 691Lennard-Jones 395ley de Hooke 370, 379, 380, 531ley de las áreas 445, 448, 534leyes de conservación 455, 489, 491,
514, 519, 576, 725leyes de la mecánica 490, 596leyes del movimiento 514, 532, 697ligadura 594-597, 600, 605, 606, 610,
702, 712-714, 716ligaduras 587, 594-597, 600, 604-607,
643, 697, 702, 705, 712, 713ligaduras bilaterales 605, 606ligaduras de rigidez 595ligaduras holónomas 595ligaduras unilaterales 605límite elástico 379línea de acción 501, 613, 652, 664, 698,
700, 701, 707, 715-717línea de los equinoccios 647Lissajous 449, 450, 452, 454
J.A. Lissajous (1822-1880) 449longitud de onda 540, 582longitud efectiva 392longitud reducida 633, 635, 636, 649,
701Luna 485, 507, 526, 535, 536, 647, 691
742 Apéndice B.- Índice alfabético.
m.a.s. 363-366, 368-371, 377, 380, 381,386, 392, 427, 429, 438-445,447-450, 452-454, 532, 721
macroscópico 457, 541magnitud vectorial 368, 544magnitudes escalares 624magnitudes vectoriales 624máquina de Atwood 648masa en reposo 537, 574, 575masa gravitatoria 494masa reducida 486, 519, 526-530, 532,
534, 553, 560masa relativista 537masa variable 455, 519-521, 523, 726matriz 368, 369, 457, 473, 474, 480,
482, 486, 487, 623-629, 631,639, 648, 679, 680, 682, 699,704, 705
matriz de inercia 457, 473, 474, 480,482, 486, 487, 623-629, 631,639, 648, 679, 680, 682, 699,704, 705
Maxwell 365Mecánica Clásica 506, 619método de diferencias finitas 544, 700métodos numéricos 491microscópico 457moderador 565, 580módulo de la velocidad 555, 660molécula de CO 540molécula de hidrógeno 540, 583moléculas diatómicas 531momento angular 489, 491, 498-500,
502-510, 514, 515, 519, 529,530, 536, 541, 588, 591,619-628, 630-632, 636, 637,638, 639, 641-645, 648, 650,658, 659, 669, 670, 679, 681,682, 686, 688, 689, 693, 694,696, 698, 699, 709, 711
momento angular de un sistema departículas 502, 622
momento angular de un sólido rígido621, 626, 699
momento angular de una partícula 498,506, 626
momento angular interno 506, 507, 510,515
momento angular intrínseco 506, 530,625, 626
momento angular orbital 506, 507, 625,626
momento de inercia 457, 470-472, 474,475, 477, 479-484, 486, 487,588, 621, 622, 627, 628, 631,632, 634, 636, 637, 643,
645, 648, 650, 659, 661,662, 674, 693, 695, 711,715, 718
momento dinámico 640, 681, 683, 685momento resultante 500, 503, 504, 507,
515, 590-592, 597, 602, 603,632, 637, 666, 667, 685, 686,704, 705
momento resultante general 590, 591momentos de inercia 457, 470, 471, 473,
474, 475, 477, 482, 483, 623,624, 627, 629, 669, 693, 714
momentos principales de inercia 627,628, 629, 648, 684, 690, 691,699
Morse 540movimiento angular 386, 506, 661movimiento armónico 361, 363, 364,
367, 369-371, 373, 375, 392,393, 416, 427, 440, 633, 673,721
movimiento armónico simple 361, 363,364, 367, 369-371, 373, 375,392, 393, 416, 427, 440, 633,673, 721
movimiento circular 368, 447, 638movimiento de rodadura 661movimiento de rotación 506, 523, 619,
621, 630, 633, 636, 641-646,662, 665, 700, 701, 717
movimiento de rotación del sólido rígido619, 621, 630, 636, 641
movimiento de traslación 497, 510, 619,620, 621, 663, 665, 670, 698,701
movimiento de traslación del sólidorígido 619-621
movimiento del centro de masa 489,495, 497, 505-507, 509, 526,527, 529, 530, 560, 562, 620,625, 657, 672, 675
movimiento del sólido rígido 499, 619,620, 640, 679, 680, 684, 686,692, 702
movimiento general del sólido rígido620, 655, 657, 667, 731
movimiento giroscópico 619, 640, 645,647, 650
movimiento helicoidal 660movimiento interno 497, 505-507movimiento libre del sólido rígido 679,
685movimiento oscilatorio 364, 370, 377,
388movimiento periódico 363, 376movimiento planetario 534movimiento rectilíneo 386, 588

Apéndice B.- Índice alfabético. 743
movimiento relativo 419, 526, 527, 529,530, 532, 534, 539, 562, 576,612, 680
movimiento uniforme 685, 696muelle 363, 370, 380, 381, 384, 385,
393, 394, 407, 416-419, 424,426, 427, 428, 515, 516, 531,532, 533, 539, 579, 617, 618,672, 675
Naturaleza 363, 365, 386, 497, 526, 531,542, 543, 544, 547, 548, 664
neutrón 565, 580, 581neutrones 506, 565, 581neutrones rápidos 565Newton 370, 380, 382, 445, 489, 493,
494, 495, 500-502, 504, 514,521, 525, 532, 534, 543, 544,547, 549, 554, 631, 708
niveles de energía 529Norte geográfico 646Norte magnético 646núcleo atómico 541, 575número cuántico orbital 507número cuántico principal 507números complejos 368nutación 641, 643, 647, 680, 696observador inercial 513ondas electromagnéticas 365operador 429operador diferencial 429operador diferencial lineal 429operadores diferenciales 429oposición de fase 367órbitas elípticas 534, 535origen de momentos 503, 621, 631, 666,
698, 709oscilación forzada 416, 452oscilaciones amortiguadas 361, 397, 398,
400, 401, 405-408, 411, 416,424, 427, 431, 675, 722
oscilaciones de dos cuerpos 519, 531,532
oscilaciones en las proximidades delequilibrio 363, 375
oscilaciones forzadas 397, 407, 408,413, 416
oscilaciones libres 397, 401, 407, 408,675
oscilador amortiguado 401, 402, 404,405, 420, 424, 425, 427, 452
oscilador armónico simple 373, 375,378, 379, 392, 393, 397, 402
oscilador bidimensional 450oscilador débilmente amortiguado 438oscilador forzado 397, 407, 411, 414,
415, 425, 426, 431, 436
oscilador sobreamortiguado 406, 407,424
osciloscopio 449, 452-454Pappus 469, 470Pappus-Guldin 469, 470Papus-Guldin 465par de arranque 664par de fuerzas 592, 639, 643, 694par de resistencia a la rodadura 664parábola 372, 376, 395, 454, 485, 608parámetro de amortiguamiento 400, 402,
406, 407, 414, 416, 420, 424,425, 428, 452
parámetro de impacto 549, 551, 564,579, 580
partícula alfa 538, 541, 581, 583partícula libre 587partículas elementales 416, 506, 542,
548péndulo balístico 579péndulo cicloidal 363, 387, 391, 395péndulo compuesto 694, 699péndulo cónico 601, 639, 694péndulo de Kater 635péndulo físico 619, 632-635, 649, 701péndulo reversible 635péndulo simple 363, 385-391, 394, 395,
425, 502, 633, 649, 675, 676péndulo simple equivalente 633, 649,
676péndulo simple o matemático 385pequeñas oscilaciones 378, 383, 387,
394, 395, 502, 503, 540, 649,674, 675, 694, 695
percusión 543-546, 548, 577, 634, 697,698, 699-704, 706-709, 712,715, 716-719
percusión angular 697-699, 704percusiones 543, 546, 547, 697-699,
702, 703-707, 711-713, 718periodo 363-365, 368, 371, 373, 374,
377, 384, 387-395, 401, 405,424, 425, 426, 432, 433, 435,437, 438, 442, 449, 453, 454,532, 535, 539, 579, 633-635,647, 649, 651, 672, 673, 675,676, 691, 694, 722
periodo de oscilación 389, 579, 647, 649periodo de revolución 539permitividad del vacío 426piano 405, 425, 444pilotos automáticos 646Planck 507, 582planetas 507, 526, 534-536plano de simetría 464, 476plano del movimiento 700

744 Apéndice B.- Índice alfabético.
Poinsot 684polarización 447polarización circular 447polarización elíptica 447polarización rectilínea 447polea 516, 615, 648, 649, 652, 674poleas 615, 648polígono de apoyo 598, 599polinomio característico 628, 629polo 647, 691polo Norte 647, 691positrón 529, 539potencia 397, 402, 404, 412, 413, 415,
416, 417, 422-428, 438, 536,537, 538, 667, 675
potencia media 412, 413, 422, 425, 426,428, 675
potencial 363, 370, 372, 373, 375-380,382-384, 388, 389, 393, 394,395, 403, 404, 415, 453, 489,495, 510-513, 515, 519, 530,538, 540, 573, 609, 610, 668
pozo de potencial 372, 376, 377, 388,395
pozo de potencial cuadrado 395precesión 640-645, 647, 650, 651, 679,
680, 688-691, 693, 695, 696precesión de los equinoccios 647, 651,
691precesión del momento angular 644principio de conservación del momento
angular 504, 507principio de liberación de Lagrange 596,
600, 702, 705principio de los trabajos virtuales 587,
605, 606, 607principio de relatividad 551principio de relatividad de Galileo 551principio de superposición 429, 430,
439, 589problema de los N-cuerpos 489-491producto escalar 609producto mixto 658producto vectorial 599, 641productos de inercia 457, 472-474, 479,
480, 481, 482, 486, 623-627,629, 658
pulsaciones 443, 444puntos fijos 597radiación 402, 582radio de curvatura 395radio de giro 457, 472, 486, 634, 649,
650, 700rayos X 582reacción endoenergética 574-576reacción exoenergética 575, 576
reacción normal 643, 663, 664reacción nuclear 574, 575, 581reacción vincular 596-598, 600reacciones 416, 541, 542, 566, 573, 574,
576, 583, 588, 597-601, 612,613, 614-616, 618, 639, 650,664, 691, 694, 695, 702, 704,705, 706, 707, 713, 715, 718,719
reacciones en los apoyos 599-601, 612,613, 615, 616, 618, 639, 650,664
reacciones nucleares 416, 574, 583reacciones vinculares 597-599recta directriz 589rectificación 453referencial del centro de masa 477, 505,
506, 509, 513, 514, 530, 535,541, 551-553, 556, 557, 562,567, 569, 575
referencial del laboratorio 551-553, 555,556, 557, 562, 564, 567, 568,574, 575, 581, 582, 619, 620,636
referencial inercial 490, 492, 496, 497,501, 508, 514, 520, 521, 523,525, 527, 549, 551, 588, 630,641, 656, 679, 681, 682, 684,685, 698, 712
referencial ligado al cuerpo 619, 627,628, 630, 689
referencial móvil 619, 641, 658, 680referencial no-inercial 588, 680referencial solidario 601, 602, 619, 620,
626, 639, 658, 679, 680, 684regla de Huygens-Newton 547, 549, 554,
708representación de Fresnel 363, 368, 440representación fasorial 368, 440, 441,
450resistencia a la rodadura 655, 663, 664resonancia 397, 412-418, 422, 423, 426,
427, 428, 438, 675resonancia en amplitud 417, 426, 438resonancia en la amplitud 414, 415rigidez 508, 589, 595, 605, 637, 664,
667, 668rodadura 510, 655, 661-666, 670-672,
682, 731rotación de la Tierra 523, 645-647, 679,
690, 691, 695rotación intrínseca 681, 684rotación virtual 504rotacional 667rotaciones 507, 545, 693rotor 368, 417, 426, 628, 646rozamiento cinético 670

Apéndice B.- Índice alfabético. 745
rozamiento de rodadura 664rozamiento estático 393, 510, 612, 613,
615, 651, 652, 664rueda sin deslizar 676, 677Rutherford 542, 551, 574
Ernest Rutherford (1871-1937) 542S.C.M. 552, 728SCM 497, 498, 506, 509, 514, 515, 530,
531, 551-562, 567, 570, 571,573, 575, 576, 582
semieje mayor 535sensibilidad del muelle 380serie de Fourier 432, 433, 435, 436, 438,
452, 453simetría de revolución 476, 482, 483,
624, 625, 628, 693, 694sistema abierto 521sistema aislado 490, 494, 496, 497, 503,
513, 514sistema c.g.s. 392sistema cerrado 490, 519, 522sistema conservativo 372, 382, 385sistema de dos partículas 525, 528-530,
552sistema de fuerzas 543, 587-591, 593,
597, 598, 600, 611, 666, 667sistema de referencia 489, 497, 601, 657sistema de referencia del centro de masa
489, 497sistema hiperestático 596, 599Sistema Internacional 370sistema masa-muelle 363, 380, 381, 384sistema solar 363, 507, 519, 534, 535,
542sistema Tierra-Luna 535, 536sistemas de masa variable 455, 519, 520,
726sistemas de partículas 455, 457, 489,
541, 542, 620, 621, 625, 630,667, 725
sistemas de unidades 547sistemas de vectores 590sistemas de vectores equivalentes 590sobreamortiguamiento 397, 406sobretonos 432Sol 507, 526, 534-536, 538, 539, 647,
691sólido rígido 457, 474, 497, 499, 508,
509, 510, 512, 585, 587-592,594-597, 600, 611, 619,620-622, 625, 626, 628, 630,631, 636, 640, 641, 655, 656,657-661, 663, 666-669, 679,680, 684-686, 688, 691, 692,694, 697, 698-700, 702, 705,715, 728, 729, 731, 733
solución estacionaria 420solución exacta del problema del péndulo
363, 388solución general 371, 381, 400, 405,
408, 431solución particular 408, 409, 430, 431Sommerfeld 640spin 506, 507superposición de dos M.A.S. 429, 439,
443, 444superposición de movimientos 723suspensión 391, 392, 396, 406, 579, 617,
632, 633-635, 634, 635, 634,635, 643, 644, 649, 695, 701,702, 703, 711, 715, 716
suspensión Cardan 643, 695tambor 419Taylor 378temperatura 514tensión 380, 383, 384, 386, 615, 618,
648, 649, 652, 653tensor 619, 623, 624, 627, 629, 630tensor de inercia 619, 623, 624, 627, 630teorema de Carnot 697, 712-714teorema de Chasles 620, 660teorema de Fourier 429, 432, 436, 439teorema de Huygens 619, 632, 635, 700teorema de Kœnigs 626, 657, 661teorema de la cantidad de movimiento
492, 493, 495, 497, 543, 620teorema de la energía 508, 509, 512,
513, 655, 667, 668teorema de la energía cinética 508, 509,
512, 655, 667, 668teorema de los ejes perpendiculares 475,
629teorema de Steiner 477, 479, 480, 483,
486, 629, 634, 662teorema de Taylor 378teorema de Varignon 592, 602teorema del centro de percusión 697,
700, 703, 707teorema del momento angular 499, 502,
503, 507, 621, 631, 632teorema del virial 375teoremas de Papus-Guldin 465teoría cuántica 582teoría de la elasticidad 599tercera ley de Kepler 534, 535términos anarmónicos 378, 379tiempo de relajación 398, 399, 402-404,
410, 416, 424-426tiempo de relajación efectivo 399, 402,
403Tierra 363, 391, 405, 496, 507, 517,
523, 526, 529, 531, 534-536,

746 Apéndice B.- Índice alfabético.
563, 592, 594, 645, 646,647, 651, 679, 690, 691,695
trabajo 397, 398, 407, 418, 495, 504,508, 509-513, 516, 537, 538,540, 544, 585, 605, 606, 655,666, 667-671, 674, 712, 731
trabajo virtual 504, 605, 606, 712trabajos virtuales 587, 605-607, 712transformación de ángulos 541, 557transformada de Fourier 438transmutación 574trompo 619, 640-643, 650, 679-681U.A. 539unidad de masa atómica 575unidades de masa 453, 537, 575Uranio 538, 565valor medio 374, 393, 404, 413, 444,
544valor medio de una función 374van der Waals 540variación de latitud 691Varignon 592, 602vector de módulo constante 638, 642vector de posición 453, 458, 479, 496,
498, 499, 505, 508, 510, 515,525, 530, 534, 655, 698, 712
vector deslizante 698vector rotatorio 368, 440vectores deslizantes 589-591, 603, 698vectores paralelos 593velocidad angular 365, 368, 369, 388,
418, 426, 428, 440, 441, 507,588, 591, 601, 608, 613, 621,622, 623-628, 630, 631, 636,637, 638, 639, 641, 642, 645,648, 649-651, 655, 656, 658,659, 660-662, 665, 666, 669,673, 674, 676, 680-682, 684,686, 687, 688, 690, 692, 694,695, 696, 699, 704, 705, 709,711, 714-717, 719
velocidad angular de precesión 641, 642,645, 650, 680, 688, 690, 696
velocidad areolar 448velocidad de escape 524velocidad de la luz 426, 494, 537, 582velocidad de traslación 510, 625, 651,
673, 676, 677, 682, 719velocidad del centro de masa 496, 505,
509, 515, 529, 539, 540, 551,552, 559-561, 569, 570, 582,709, 715
velocidad media 545velocidad relativa 499, 522, 529, 538,
547, 549, 560
versor 479, 482, 534, 631, 658, 666vibraciones 363, 364, 415, 417, 418,
426, 428, 444, 540vibraciones forzadas 428vibraciones moleculares 540vibrómetro 428violín 405virial 375viscosidad 425voltio 575Zeiger 368

![Ejercicio 16.4 (Simulacion) [Contabilidad y fiscalidad 2013].pdf](https://static.fdocuments.ec/doc/165x107/55cf93f8550346f57b9ef0d9/ejercicio-164-simulacion-contabilidad-y-fiscalidad-2013pdf.jpg)





![Ejercicio 16.4 (Simulacion) [Contabilidad y Fiscalidad 2013]_Soluciones](https://static.fdocuments.ec/doc/165x107/55cf8fe8550346703ba11ebf/ejercicio-164-simulacion-contabilidad-y-fiscalidad-2013soluciones.jpg)