lab lugar geometrico de las raices

of 6
-
Upload
fernando-rios-castro -
Category
Documents
-
view
5 -
download
0
description
inivalle, laboratorio de control
Transcript of lab lugar geometrico de las raices
-
ESCUELA DE INGENIERA ELECTRICA Y ELECTRNICA
LUGAR GEOMTRICO DE LAS RACES
Julio Cesar Zambrano Realpe, Juan Felipe Moreno Montoya
Informe de Laboratorio No 2
Resumen Este documento es el informe de la prctica de laboratorio de generacin del lugar geomtrico de las races, donde
se consigna el anlisis y generacin del LGR para un sistema de
lazo cerrado y otro con dinmicas agregadas.
Palabras clave Lugar geomtrico de las races, polos, races, funcin de transferencia.
I. INTRODUCCIN
El lugar geomtrico de las races es una herramienta grfica que
permite determinar la posicin de los polos de la funcin de
transferencia de lazo cerrado para un determinado valor de
ganancia K a partir de la funcin de transferencia de lazo
abierto. La variacin de los parmetros fsicos de un sistema
que logran una modificacin de su ecuacin caracterstica,
modifican las races o polos de dicho sistema, debido a que la
respuesta transitoria del sistema est relacionada con la
ubicacin de las races de su ecuacin caracterstica en el plano
S.
Conocer la ubicacin de las races en el plano S ante variaciones
de un parmetro, representa una herramienta til de anlisis y
diseo de un sistema de control.
II. RESUMEN Y ANLISIS
LAZO ABIERTO.
Por medio del software LabView se dise un programa en el
cual se construy un lazo de control. Se identific el sistema
por medio de su respuesta esttica y se seleccion un punto de
operacin.
Por medio de la grfica de respuesta esttica se identific un
punto intermedio de la zona lineal positiva, el cual fue
PO= 6V
Grfica 1. Respuesta esttica del sistema.
Posterior a esto se hall la respuesta dinmica del sistema, ante
entradas tipo escaln alrededor del punto de operacin
escogido, hallando as la funcin de transferencia del sistema
en lazo abierto.
Grfica 2. Respuesta dinmica del sistema en lazo abierto.
-
ESCUELA DE INGENIERA ELCTRICA Y ELECTRNICA
2
Teniendo en cuenta que la funcin de transferencia de un
sistema de primer orden se define como:
() =
+ 1
=
, donde es la amplitud final estabilizada de la
respuesta al escaln, y es la amplitud del escaln.
= 1.94
1= 1.94
Sabiendo que es la constante que representa el tiempo que tarda el sistema de respuesta a un escaln para llegar al 63.21%
de su valor final.
Entonces (1.94)*63.21% = 1.226, por medio de la grfica de la
respuesta dinmica del sistema se obtiene el valor de tiempo
para dicha amplitud, la cual es
= 1.353
De esta manera se define la funcin de transferencia del sistema
en lazo abierto como
() = 1.94
1.353 + 1
Ya obtenida (), por medio del software Matlab con la herramienta step ( ), se obtuvo la respuesta dinmica simulada
y se compar con la respuesta dinmica experimental.
0 2 4 6 8 10 12 14 16-0.5
0
0.5
1
1.5
2
Step Response
Time (sec)
Am
pli
tud
e
Grfica 3. Comparacin respuesta dinmica del sistema en lazo abierto.
LAZO CERRADO
Ya identificado el sistema, se procedi a cerrar el lazo de
control y variar la ganancia en lazo directo del sistema. Se
registraron las respuestas temporales ante entradas tipo escaln
para variaciones de ganancia desde 1 hasta 16.5.
Inicialmente se ingres un k=0.6, variando de manera aleatoria
hasta llegar a k=16.5, para k mayores de 6.5 el sistema empez
a presentar no linealidades debido a la alta ganancia ingresada,
obligando al sistema a trabajar en zona de saturacin el sistema
presento sobrepicos cuando la amplitud del escaln fue igual a
cero. Este fenmeno se pudo observar en la grfica 4.
0 50 100 150 200 250 300 350-1.5
-1
-0.5
0
0.5
1
1.5
Tiempo
A
mp
litu
d
Grfica 4. Respuestas temporales en lazo cerrado al variar la ganancia.
Obtenida la respuesta temporal del sistema, se compar con los
resultados de la simulacin en Matlab con la herramienta
feedback ( ), la cual nos permite ingresar la funcin de
transferencia, la ganancia, y el valor de la realimentacin que
en nuestro caso es unitaria.
0 0.5 1 1.5 2 2.5 3 3.5 4-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Step Response
Time (sec)
Am
plitu
de
Grfica 5. Comparacin respuesta temporal de lazo cerrado para k=0.6.
-
ESCUELA DE INGENIERA ELCTRICA Y ELECTRNICA
3
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Step Response
Time (sec)
Am
plitu
de
Grfica 6. Comparacin respuesta temporal de lazo cerrado para k=2.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Step Response
Time (sec)
Am
plitu
de
Grfica 7. Comparacin respuesta temporal de lazo cerrado para k=5.5.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Step Response
Time (sec)
Am
pli
tud
e
Grfica 8. Comparacin respuesta temporal de lazo cerrado para k=6.5.
0 0.1 0.2 0.3 0.4 0.5 0.6-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Step Response
Time (sec)
Am
pli
tud
e
Grfica 9. Comparacin respuesta temporal de lazo cerrado para k=8.5.
0 0.1 0.2 0.3 0.4 0.5 0.60
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plitu
de
Grfica 10. Comparacin respuesta temporal de lazo cerrado para k=14.5.
Como se puede observar en las grficas, los resultados
experimentales tienen concordancia con los resultados
simulados en cuanto a tiempos de estabilizacin del sistema, y
el comportamiento fue el esperado, al aumentar la ganancia, la
respuesta que se obtuvo fue ms rpida, sin sobrepasar la
amplitud de la onda cuadrada.
Para k mayores a 6.5 debido a las no linealidades del sistema
por la alta ganancia, la respuesta no sigue el mismo
comportamiento que el resultado simulado. Tambin se puede
observar que al ser el tiempo de estabilizacin cada vez ms
pequeo, el nmero de muestras por segundo disminuye,
introduciendo tambin un error de manera grfica la respuesta
dinmica experimental.
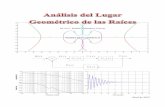
Posterior a esto, se traz el lugar geomtrico de las races para
cada k= 0.6 y k= 6.5, por medio del software Matlab con la
herramienta rlocus ( ) se obtuvo el trazo.
-
ESCUELA DE INGENIERA ELCTRICA Y ELECTRNICA
4
Grfica 11. Lugar geomtrico de las races de la funcin de transferencia en
lazo abierto.
Analizando el trazo obtenido se observa que la ubicacin del
polo concuerda con el polo hallado tericamente:
() =1.94
1.353 + 1
Polo en = 0.739, la ubicacin del polo en el lugar geomtrico hallado con Matlab es el mismo que el hallado
tericamente.
Se puede observar que al aumentar la ganancia k, el polo se
aleja del eje imaginario, debido a que el valor del polo aumenta
negativamente.
LAZO CERRADO CON DINMICAS AGREGADAS.
Para este experimento se sigui el mismo procedimiento de lazo
cerrado, se adicion una ganancia en lazo directo, junto con
una accin integral y un polo estable, configurando as un
sistema de tercer orden.
Grfica 12. Bucla inicial para el sistema de lazo cerrado con dinmicas
agregadas.
Se registraron las respuestas temporales ante entradas tipo
escaln para variaciones de ganancia desde 0.0001 hasta 0.002.
Se utilizaron ganancias pequeas debido a que stas ofrecan
una visualizacin apropiada del comportamiento de un sistema
de tercer orden, si ingresbamos ganancias grandes el sistema
se volva inestable y no se poda observar un comportamiento
adecuado.
0 100 200 300 400 500 600 700 800 900 1000
-3
-2
-1
0
1
2
3
4
Tiempo (seg)A
mp
litu
d
Grfica 13. . Respuestas temporales en lazo cerrado con dinmicas
agregadas al variar la ganancia.
Debido a problemas en el laboratorio con el programa
LabView, no se encontraron valores de K para la integral y de
K para el sistema de primer orden. La solucin que se
implement fue por medio de prueba y error, encontrar valores
de K para la integral y valores de K para el sistema de primer
orden, los cuales hacan que las respuestas dinmicas simuladas
se comportaran de la misma manera que las respuestas
experimentales.
De esta manera se obtuvo la siguiente bucla para el sistema de
lazo cerrado con dinmicas agregadas:
Grfica 14. Bucla final para el sistema de lazo cerrado con dinmicas
agregadas.
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
Root Locus
Real Axis
Imagin
ary
Axis
-
ESCUELA DE INGENIERA ELCTRICA Y ELECTRNICA
5
Como se puede observar en la bucla, el denominador posee un
gran valor, razn por la cual se utilizaron pequeos valores de
K para obtener las siguientes respuestas dinmicas desde que el
sistema se comporta estable hasta que se desestabiliza.
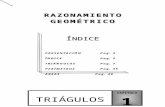
Las grficas de respuesta temporal de sistema de lazo cerrado
con dinmicas agregadas, se muestran a continuacin:
0 10 20 30 40 50 60 70-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Step Response
Time (sec)
Am
plit
ude
Grfica 15. Comparacin respuesta lazo cerrado con dinmicas agregadas
para k=0.0001.
Grfica 16. Comparacin respuesta lazo cerrado con dinmicas agregadas
para k=0.0003.
0 5 10 15 20 25 30 350
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Amplitu
de
Grfica 17. Comparacin respuesta lazo cerrado con dinmicas agregadas
para k=0.0005.
Grfica 18. Comparacin respuesta lazo cerrado con dinmicas agregadas
para k=0.0009.
0 20 40 60 80 100 120 140 160 1800
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Step Response
Time (sec)
Am
plitu
de
Grfica 19. Comparacin respuesta lazo cerrado con dinmicas agregadas
para k=0.0015.
Grfica 20. Comparacin respuesta lazo cerrado con dinmicas agregadas
para k=0.0020.
0 5 10 15 20 25 30-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Step Response
Time (sec)
Amplitu
de
0 10 20 30 40 50 600
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Step Response
Time (sec)
Am
plitu
de
0 10 20 30 40 50 60 70-2
-1
0
1
2
3
4
Step Response
Time (sec)
Am
pli
tud
e
-
ESCUELA DE INGENIERA ELCTRICA Y ELECTRNICA
6
Las grficas mostradas permiten conocer la manera en que el
sistema responde ante entradas escaln variando la ganancia. A
pequeos valores de K el sistema se comporta como si fuera de
primer orden, para K intermedios el sistema empieza a oscilar
alrededor del valor final hasta estabilizarse, y para valores
grandes de K el sistema se vuelve inestable.
De manera grfica se observ que para K= 0.0020 el sistema
empieza a ser inestable, pero con la ayuda de la herramienta
Matlab hallamos un Kcritico ms aproximado al real el cual es
Kc=0.00189, a partir de este valor el sistema se vuelve
inestable.
0 1 2 3 4 5 6 7 8
x 104
-6
-4
-2
0
2
4
6
8
10x 10
26
Step Response
Time (sec)
Am
plitu
de
Grfica 21. Respuesta en lazo cerrado con dinmicas agregadas ante entrada
escaln para k=0.00189.
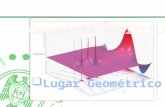
En base a las respuestas obtenidas, se traz el lugar geomtrico
de las races del sistema de tercer orden hallado al multiplicar
la funcin de transferencia en lazo abierto por la accin integral
y el polo estable.
Grfica 22. Lugar geomtrico de las races del sistema de tercer orden.
En el cuadro de texto de la grfica 23 del trazo del lugar
geomtrico de las races, se puede observar el Kcritico, en el
texto que dice Gain= 0.00189, corroborando que el K hallado
experimentalmente concuerda con el simulado, con un error
porcentual del 5.5%., esto debido a que el Kcritico hallado
experimentalmente fue de 0.002.
CONCLUSIONES
El trazo del lugar geomtrico de las races es una
herramienta grfica bastante til, ya que permite
conocer el Kcritico y la forma en que se mueven los
polos de lazo cerrado al cambiar la ganancia del
sistema, el cual es nuestro parmetro variable,
determinando as las caractersticas bsicas de la
respuesta transitoria.
Las simulaciones corroboraron que las funciones de
transferencia halladas fueron correctas y modelan de
manera adecuada la respuesta del sistema
La respuesta del sistema de tercer orden en trminos
generales fue muy lenta comparada con la respuesta en
lazo cerrado, debido a que la frecuencia natural del
sistema de tercer orden disminuye al ser afectado por
ganancias tan pequeas y el tiempo de estabilizacin
es inversamente proporcional a la frecuencia natural,
por esta razn el tiempo de estabilizacin aumenta.
La respuesta de lazo cerrado con dinmicas agregadas
presento respuestas sobreamortiguadas para
0