Informe ascensor
8
INTRODUCCION – OBJETIVO El siguiente proyecto esta destinado a la educación y práctica de colegios técnicos, institutos y universidades. Se pretende mostrar y enseñar el verdadero funcionamiento de un ascensor comandado por un Controlador Lógico para realizar la práctica de diseñar el programa con el cual se dirige el ascensor, grabarlo en el controlador lógico y ponerlo en práctica. El ascensor consta con un sistema de abertura y cerrado de puertas, mecanizado por un motor de CC paso a paso, este motor es energizado siguiendo una secuencia en sus bobinas internas, la secuencia se genera con un conjunto de circuitos electrónicos digitales los cuales explicaremos mas adelante. El motor es conectado y desconectado por dos relés los cuales son comandados directamente desde el Controlador lógico. El motor que realiza el trabajo de subir y bajar la cabina del ascensor igualmente es un motor de CC paso a paso, el cual se energiza por otro conjunto de circuitos electrónicos digitales totalmente independientes a los del motor anterior. Es conectado y desconectado por dos relés comandados directamente desde el Controlador lógico. MOTORES A continuación explicare y mostrare con detalle el funcionamiento de los motores utilizados en este proyecto. Los motores paso a paso son ideal para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos motores es el hecho de poder moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90º hasta pequeños movimientos de tan solo 1.8º, es decir se necesitarían 4 pasos en el primer caso (90º) y 200 pasos para el segundo caso (1.8º), para completar un giro completo de 360º. Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien totalmente libres, si una o más de sus bobinas está energizada, el motor estará enclavado en la posición correspondiente y por el contrario quedará completamente libre si no circula corriente por ninguna de sus bobinas. En este informe solo veré los motores paso a paso del tipo imán permanente, ya que estos son los mas usados en robótica.
-
Upload
miguel-fernandez -
Category
Documents
-
view
674 -
download
1
Transcript of Informe ascensor

INTRODUCCION – OBJETIVO
El siguiente proyecto esta destinado a la educación y práctica de colegios técnicos, institutos y universidades. Se pretende mostrar y enseñar el verdadero funcionamiento de un ascensor comandado por un Controlador Lógico para realizar la práctica de diseñar el programa con el cual se dirige el ascensor, grabarlo en el controlador lógico y ponerlo en práctica.
El ascensor consta con un sistema de abertura y cerrado de puertas, mecanizado por un motor de CC paso a paso, este motor es energizado siguiendo una secuencia en sus bobinas internas, la secuencia se genera con un conjunto de circuitos electrónicos digitales los cuales explicaremos mas adelante. El motor es conectado y desconectado por dos relés los cuales son comandados directamente desde el Controlador lógico.
El motor que realiza el trabajo de subir y bajar la cabina del ascensor igualmente es un motor de CC paso a paso, el cual se energiza por otro conjunto de circuitos electrónicos digitales totalmente independientes a los del motor anterior. Es conectado y desconectado por dos relés comandados directamente desde el Controlador lógico.
MOTORES
A continuación explicare y mostrare con detalle el funcionamiento de los motores utilizados en este proyecto.
Los motores paso a paso son ideal para la construcción de mecanismos en donde se requieren movimientos muy precisos.
La característica principal de estos motores es el hecho de poder moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90º hasta pequeños movimientos de tan solo 1.8º, es decir se necesitarían 4 pasos en el primer caso (90º) y 200 pasos para el segundo caso (1.8º), para completar un giro completo de 360º.
Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien totalmente libres, si una o más de sus bobinas está energizada, el motor estará enclavado en la posición correspondiente y por el contrario quedará completamente libre si no circula corriente por ninguna de sus bobinas.
En este informe solo veré los motores paso a paso del tipo imán permanente, ya que estos son los mas usados en robótica.
Principio de funcionamiento.
Básicamente estos motores están constituidos normalmente por un rotor sobre el que van aplicados distintos imanes permanentes y por un cierto número de bobinas excitadoras bobinadas en su estator. Las bobinas son parte del estator y el rotor es un imán permanente, Toda la conmutación debe ser externamente manejada por un controlador.

El motor que hemos utilizado es del tipo unipolar.
Estos motores suelen tener 6 o 5 cables de salida, dependiendo de su conexionado interno. Este tipo se caracteriza por ser más simple de controlar. Las entradas de activación pueden ser directamente activadas por un microcontrolador.
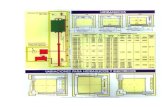
La secuencia que se debe utilizar en este motor es la siguiente:
Paso | A B C D
0 | 1 1 0 01 | 0 1 0 02 | 0 1 1 03 | 0 0 1 04 | 0 0 1 15 | 0 0 0 16 | 1 0 0 1
7 | 1 0 0 0
CIRCUITO CONTROLADOR
Para generar la secuencia antes mencionada es necesario un circuito controlador, el cual se encarga de generar esta secuencia a un velocidad deseada y mandarla a un circuito de potencia, que cumple la función de amplificar la señal para lograr hacer circular una mayor corriente (consumida por el motor), la que el circuito controlador no es capaz de entregar.
El circuito controlador esta dividido en 3 partes, que al conectarlas entre si logramos la secuencia que necesitamos para el correcto funcionamiento del motor utilizado.
-La primera etapa es básicamente un circuito 555 timer, este genera el pulso base con el cual trabajaremos en las demás etapas.

-La segunda etapa es un contador basado en un circuito integrado 7493 (4-bit binary counter), el cual utiliza el pulso generado por el 555 y genera en su salida todas las combinaciones posibles entre 0000 y 1111. La cual utilizaremos en la siguiente etapa.
-La tercera etapa del controlador es un combinacional basado en compuertas lógicas. (NOT-OR-AND)
Esta utiliza las combinaciones que entrega el contador y pasando por una serie de compuertas se obtiene en la salida la secuencia necesaria que mencionamos anteriormente (página 2). Para lograr que el motor gire en sentido contrario solo es necesario invertir 2 terminales del motor ( B y D).
Los circuitos fueron diseñados y simulados en el programa Electronics Workbench, una vez que trabajaron correctamente en el ordenador, se montaron en la protoboard, encontrando algunas fallas las cuales fueron analizadas, tratadas y corregidas. Una vez que los circuitos funcionaron correctamente en la protoboard, se diseñaron las pistas para la placa de cobre con el programa Trax Maker, y finalmente se probaron los circuitos ya soldados en las placas y terminados por completo.

CIRCUITO DE POTENCIA
Esta parte del sistema se encarga de suministrar al motor una mayor corriente para así lograr su correcto funcionamiento. El circuito trabaja en base a transistores TIP122, los cuales al recibir una baja corriente en su base se excita y conecta las bobinas del motor a tierra (GND), sabiendo que los terminales comunes van conectados a +5Vcc. Así logramos conectar las distintas bobinas siguiendo la secuencia que nos entrega el circuito combinacional.
INDICADOR DE PISO (Display)
El circuito fue diseñado para dos pisos, con dos finales de carrera respectivamente.

Esta es una posible opción de Controlador Lógico, pero es demasiado costoso y también es muy complicado de conseguir. Aunque si se consigue GENIAL!!
Pero es más económico hacerlo con un microcontrolador. En esto estoy investigando.
CONTROLADOR LÓGICO PROGRAMABLE
A continuación está el programa utilizado en el PLC para controlar el ascensor, programado en diagrama escalera en el programa Suco.
Entradas S1 – Petición piso 1 Salidas Out1 – Relé SubidaS2 – Petición piso 2 Out2 – Relé Bajada

S3 – Puerta cerrada Out3 – Relé cierre puertasS4 – Puerta abierta Out4 – Relé abertura puertasS5 – Posición piso 1S6 – Posición piso 2
En este informe solo se explica la parte electrónica del proyecto,
Los motores utilizados fueron rescatados de deshechos de impresoras en mal estado, así como también los relés utilizados fueron rescatados de deshechos de una empresa y la construcción de la estructura que mantiene el ascensor fue hecha con metales de sobra del mismo taller de construcciones metálicas
.