IMPLEMENTACION DE CONTROL DE VELOCIDAD DE UN MOTOR...
126
1 IMPLEMENTACION DE CONTROL DE VELOCIDAD DE UN MOTOR DC UTILIZANDO LÓGICA DIFUSA EN LA PLATAFORMA DE LABVIEW JENNIFER AGREDO FAJARDO UNIVERSIDAD DE SAN BUENAVENTURA CALI FACULTAD DE INGENIERÍA PROGRAMA DE INGENIERÍA ELECTRÓNICA LABORATORIO DE ELECTRÓNICA APLICADA – LEA SANTIAGO DE CALI 2011
Transcript of IMPLEMENTACION DE CONTROL DE VELOCIDAD DE UN MOTOR...

1
IMPLEMENTACION DE CONTROL DE VELOCIDAD DE UN MOTOR DC
UTILIZANDO LÓGICA DIFUSA EN LA PLATAFORMA DE LABVIEW
JENNIFER AGREDO FAJARDO
UNIVERSIDAD DE SAN BUENAVENTURA CALI
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA
LABORATORIO DE ELECTRÓNICA APLICADA – LEA
SANTIAGO DE CALI
2011
2
IMPLEMENTACIÓN DE CONTROL DE VELOCIDAD DE UN MOTOR DC
UTILIZANDO LÓGICA DIFUSA EN LA PLATAFORMA DE LABVIEW
JENNIFER AGREDO FAJARDO
Informe final de trabajo de grado
Director JUAN CARLOS CRUZ ARDILA
ING. ELECTRISISTA
UNIVERSIDAD DE SAN BUENAVENTURA CALI
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA
LABORATORIO DE ELECTRÓNICA APLICADA – LEA
SANTIAGO DE CALI
2011

3
Este trabajo de grado, en la modalidad
Investigación aceptado como uno de los
requisitos para obtener el título de Ingeniero
Electrónico en la Universidad de San
Buenaventura Cali.
________________________________________________
JUAN CARLOS CRUZ ARDILA, ING. Electricista
__________________________________________________
EDGAR LIZ QUINTERO, ING. Mecánico
__________________________________________________
HUGO ALBERTO GONZALES, ING Electrónico
Santiago de Cali, 9 de junio del 2011
4
DEDICATORIA
A Dios.
Por haberme permitido llegar hasta este punto y haberme dado salud para lograr
mis objetivos, además de su infinita bondad y amor.
A mi padre
Por los ejemplos de entereza y tenacidad que lo caracterizan y que me ha dado
siempre, por el valor expresado para salir adelante y por su gran amor.
A mi madre
Por haberme apoyado en todo momento, por sus consejos, sus valores, por la
estimulación constante que me ha permitido ser una persona de bien, pero más
que nada, por su maravilloso amor.
A mis familiares.
A mi abuela Hilda porque siempre me tiene en cuenta en su oraciones, A mi Tía
Janeth por ser un ejemplo a seguir, a mis primos Emilio José, Santiago y Catalina,
a mis tíos Carlos Alberto y Néstor y a todos aquellos que participaron directa o
indirectamente en la elaboración de esta tesis.
A mi profe.
Ingeniero Juan Carlos Cruz por su gran apoyo y constante motivación para la
elaboración de esta tesis.
A la Universidad San Buenaventura de Cali y en especial a la Facultad de
ingeniería Electrónica por admitirme y ser parte de una generación de
vencedores, de personas productiva y de gran profesionalismo trabajando para
que nuestro país sea cada vez mejor
¡Gracias a ustedes!

5
TABLA DE CONTENIDO
INTRODUCCION……………………………………………………………. 11
1. FORMULACION DEL PROBLEMA…………………………………… 13
2. JUSTIFICACION………………………………………………………… 14
3. OBJETIVOS……………………………………………………………… 16
3.1 OBJETIVO GENERAL ……………………………………………… 16
3.2 OBJETIVOS ESPECÍFICOS ………………………………………. 16
4. MARCO TEORICO ……………………………………………………... 17
4.1 ANTECEDENTES........................................................................ 18
4.2 LENGUAJES DE PROGRAMACIÓN …………………………….. 21
4.2.1 Fuzzytech ……………………………………………………. 21
4.2.2 Matlab…………………………………………………………. 22
4.2.3 Vhdl fpga …………………………………………………….. 22
4.3 MICROCONTROLADOR ………………………………………….. 23
5. DESCRIPCION DEL PROCESO …………………………………….. 25
5.1 COMPUTADOR / SOFTWARE LABVIEW ………………………. 26
5.2 TARJETA DE ADQUISICIÓN DE DATOS ………………………. 27
5.2.1 Proceso de adquisición de datos…………………………… 28
5.3 CONTROLADOR LÓGICO DIFUSO ……………………………. 29
5.4 ACTUADOR………………………………………………………… 37
5.5 PUENTE H …………………………………………………………. 37
5.5.1 Características ……………………………………………... 38
5.5.2 Aplicaciones.................................................................... 38
5.6 ADECUADOR ……………………………………………………… 40
5.7 PLANTA…………………………………………………………….. 42
5.7.1 Respuesta del Motor en Lazo Abierto……………………... 43
5.8 REALIMENTACIÓN……………………………………………….. 43
5.8.1 Tacómetro …………………………………………………… 43
6. DISEÑO DEL CONTROLADOR BASADO EN LOGICA DIFUSA… 48

6
6.1 SELECCIÓN DE VARIABLES DE ENTRADA Y SALIDA ……..… 48
6.2 GRADO DE PERTENENCIA DE LAS VARIABLES ……………... 49
6.3 VARIABLES LINGÜÍSTICAS DE ENTRADA……………………… 51
6.4 VARIABLES LINGÜÍSTICAS DE SALIDA…………………………. 52
6.5 CUANTIFICACIÓN DEL ERROR…………………………………… 53
6.6 DISEÑO DE LAS REGLAS………………………………………….. 55
6.7 ESTRATEGIA DE DEFUZZYFICACIÓN…………………………… 60
7. DISEÑO DEL CONTROLADOR BASADO EN LOGICA DIFUSA
IMPLEMENTADO EN LA PLATAFORMA DE LABVIEW……………. 62
8. GUIAS DE LABORATORIO……………………………………………… 65
8.1 GUÍA DE LABORATORIO No 1……………………………………... 66
8.1.1 Objetivos………………………………………………………… 66
8.1.2 Equipos e instrumentos……………………………………….. 66
8.1.3 Marco Teórico………………………………………………….. 67
8.1.4 Guía de trabajo………………………………………………… 67
8.1.4.1 Procedimiento………………………………………….. 68
8.1.4.2 Preguntas teóricas…………………………………….. 69
8.1.5 Informe Practica No 1…………………………………………. 69
8.1.6 Conclusiones…………………………………………………… 86
8.1.7 Bibliografía. ……………………………………………………. 87
8.2 GUÍA DE LABORATORIO No 2…………………………………….. 88
8.2.1 Objetivos……………………………………………………….. 88
8.2.2 Equipos e Instrumentos………………………………………. 89
8.2.3 Marco Teórico………………………………………………….. 89
8.2.4 Procedimiento………………………………………………….. 90
8.2.5 Preguntas teóricas……………………………………………. 92
8.2.6 Informe………………………………………………………….. 92
8.2.7 Conclusiones…………………………………………………… 101
8.2.8 Bibliografía……………………………………………………… 101
8.3 GUÍA DE LABORATORIO No 3 ……………………………………. 102

7
8.3.1 Objetivos……………………………………………………….. 102
8.3.2 Equipos e instrumentos………………………………………. 102
8.3.3 Marco Teórico…………………………………………………. 103
8.3.4 Procedimiento…………………………………………………. 103
8.3.5 Preguntas teóricas……………………………………………. 106
8.3.6 Preguntas para resolver en el laboratorio………………….. 106
8.3.7 Informe………………………………………………………… 107
8.3.8 Conclusiones………………………………………………….. 119
8.3.9 Bibliografía…………………………………………………….. 120
9. CONCLUSIONES Y RECOMENDACIONES………………………….. 121
10. BIBLIOGRAFIA…………………………………………………………… 124

8
TABLA DE CONTENIDO DE GRÁFICAS
FIGURA NO. 1 Formas de las Funciones de Pertenencia………..………… 21
FIGURA NO. 2 Lazo Cerrado de Control……………………………………… 26
FIGURA NO. 3 Software de Programación LaBVIEW……………………… . 27
FIGURA NO. 4 Tarjeta de Adquisición de Datos………………………….. 28
FIGURA NO. 5 Esquema de Bloques del Proceso de Adquisición de Datos 29
FIGURA NO. 6 Simulador del Control Lógico Difuso………………………….. 30
FIGURA NO. 7 Crear nuevo diseño…………………………………………… 30
FIGURA NO. 8 Variables de Entrada………………………………………….. 31
FIGURA NO. 9 Variables Lingüísticas de Entrada……………………………. 32
FIGURA No. 10 Variables Lingüísticas de Salida…………………………….. 33
FIGURA No. 11 Editor de reglas………………………………………………. 34
FIGURA No. 12 Características de Entrada/salida………………………….. 35
FIGURA No. 13 Cargar Controlador Difuso …………………………………… 36
FIGURA No. 14 Controlador Difuso …………………………………………… 36
FIGURA No. 15 Salida desde LaBVIEW al PWM …………………………… 37
FIGURA No. 16 Diagrama Puente H LMD 18200T …………………………... 39
FIGURA No. 17 Circuito Puente H……………………………………………… 39
FIGURA No. 18 Diagrama Circuito Adecuador………………………………… 40
FIGURA No. 19 Diseño final del Circuito Adecuador………………………… 41
FIGURA No. 20 Tarjeta del circuito Adecuador y Puente H………………... 41
FIGURA No. 21 Prototipo Final del Actuador y Adecuador…………………. 42
FIGURA No 22 Motor DC……………………………………………………… 42
FIGURA No. 23 Tacómetro……………………………………………………... 44
FIGURA No. 24 Gráfica de Voltaje Tacogenerador Vs Velocidad RPM…… 45
FIGURA No. 25 Gráfica de Voltaje Tacogenerador Vs voltaje Adecuador… 47
FIGURA No. 26 Entrada de LaBVIEW Realimentación ……………………… 47
FIGURA No. 27 Lazo Cerrado de Control………………………………………. 48
FIGURA No. 28 Algoritmo de Mandani………………………………………… 50

9
FIGURA No. 29 Funciones Triangulares de Entrada…………………………... 52
FIGURA No. 30 Funciones Triangulares de Salida para RPM………………... 53
FIGURA No. 31 Funciones Triangulares de Salida para PWM……………….. 54
FIGURA No. 32 Análisis del Error……………………………………………….. 54
FIGURA No. 33 Diagrama de Bloques de Control de Velocidad en LaBVIEW 63
FIGURA No. 34 Panel Frontal de Control de Velocidad……………………….. 64

10
TABLAS
TABLA No 1 Datos Motor………………………………………………......... 43
TABLA No 2 Datos confirmados del Tacogenerador……………………… 44
TABLA No 3 Datos confirmados del Adecuador………………………….. 45
TABLA No 4 Selección Variables de Entrada y Salida…………………… 49
TABLA No 5 Motor……………………………………………………………. 51
TABLA No 6 Variables Lingüísticas de Salida……………………………… 52
TABLA No 7 Cuantificador del Error………………………………………… 53
TABLA No 8 Seguimiento del Error y Cambio del Error………………….. 54
TABLA No 9 Matriz de Reglas………………………………………………. 59
TABLA No 10 Tabla de las 49 Reglas……………………………………….. 60
TABLA No 11 Matriz de Inferencias. ………………………………………… 60
11
INTRODUCCION
En los últimos años se ha incrementado considerablemente la utilización de la
inteligencia artificial en los campos de la electrónica de potencia y de los sistemas
de control de velocidad y del posicionamiento. Estos métodos, basados en
sistemas expertos, lógica difusa y las redes neuronales, necesitan una gran base
de datos o conocimientos que describan el análisis del sistema, junto a un análisis
lógico en lugar del análisis matemático para controlar el sistema y facilitar la toma
de decisiones. Uno de estos métodos corresponde a la lógica difusa; Esta
tecnología reemplaza algunos equipos analógicos ya existentes y obsoletos
generando aun mas competitividad en diversos procesos industriales, de
procesamiento de imágenes, robótica, electrónica de consumo entre otros.
“No tiene sentido buscar la solución a un problema no perfectamente definido, por
medio de un planteamiento matemático muy exacto, cuando es el Ser humano el
primero que razona empleando inexactitud” [1]. La tecnología actualmente se ha
visto inmersa en casi todos los campos del diario vivir, desde el entretenimiento, la
salud, hasta la más beneficiada, la industria. Esto se debe a que las nuevas
tendencias tecnológicas promueven cada vez al perfeccionamiento de
instrumentos especializados, haciendo más fácil la labor para aquellas personas
que buscan optimizar la calidad de vida de las personas.
La lógica difusa surge como una necesidad de mejoramiento de la lógica clásica,
ya que esta establece que cualquier enunciado o proposición puede tomar un
valor lógico (verdadero o falso, alto o bajo, prendido o apagado, cerrado o abierto,
en definitiva 1 ó 0, por ejemplo para el caso de una puerta sólo se tienen dos
posibilidades; que es estar abierta o cerrada. En la óptica de la lógica difusa,
dicha puerta no tiene porqué estar necesariamente abierta (valor 1) ni cerrada
(valor 0), sino que además puede estar abierta a medias (valor 0.5), bastante
abierta (valor 0.8), casi cerrada (valor 0.1), etc. como un intento de formalización
del razonamiento con incertidumbre. En particular y al contrario que otras formas
12
de razonamiento intenta abordar problemas definidos en términos lingüísticos y
por lo tanto imprecisos, donde todos los datos están expresados en términos
cualitativos.
La principal ventaja de utilizar términos lingüísticos como a medias, bastante, casi
poco, mucho, algo, etc. Está en que permite plantear el problema en los mismos
términos en los que lo haría un experto humano; Será nuestra tarea darle un
marco de representación formal a tal tipo de términos y con vistas a su empleo en
el Control Automático.
En cuanto a motores de corriente directa (DC), son máquinas que producen
energía mecánica a partir de energía eléctrica; Estos dispositivos hasta hace
algunos años, fueron obligatorios en aplicaciones en donde se requerían amplias
variaciones en la velocidad, sin embargo con la miniaturización de elementos en
estado sólido, los motores de inducción con programas de accionamiento se han
hecho más profesionales. Esto se debe a que los motores de DC requieren mayor
sostenimiento debido a la existencia del conmutador y las escobillas. A pesar de
ello, los motores de DC no se podrán dejar de manejar repentinamente ya que en
la actualidad se encuentran trabajando en muchas aplicaciones industriales y una
gran cantidad de ellos cuentan con una desarrollada vida útil.
En el campo del control de velocidad de los motores de DC además de poder
aplicar las técnicas convencionales del control se pueden aplicar técnicas del
control inteligente, como lo es la lógica difusa. Dentro de la lógica difusa están
dos algoritmos muy conocidos ellos son: Mamdani y Takagi Sugeno.
Estos algoritmos han tenido gran utilidad en aplicaciones reales ya que existen
actualmente avances significativos en microelectrónica y electrónica de potencia.
13
1. FORMULACIÓN DEL PROBLEMA
Actualmente la Facultad de Ingeniería Electrónica de la Universidad San
Buenaventura Cali no posee laboratorio de control inteligente, lo cual hace que los
estudiantes solo adquieran conocimientos teóricos y no puedan aplicarlos en
prácticas concretas.
Es necesario comenzar a implementar el laboratorio de control inteligente para
lograr incentivar y desarrollar en los estudiantes el ejercicio de pensar, de
fomentar la creatividad y el ingenio, y además, propiciar el ambiente adecuado
para el aprendizaje cooperativo, pero sobre todo poner en práctica lo teórico de
control para tener un mejor desarrollo conceptual como ocurre en los demás
laboratorios de ingeniería. Las actividades en el laboratorio deben desarrollarse en
un contexto social de experiencia compartida, donde el estudiante demuestre su
habilidad de aplicar la teoría, para que en un futuro cuando se encuentre en
nuevas situaciones pueda solucionar cualquier inconveniente.
La construcción de un control de velocidad para un motor DC, con una estrategia
de control inteligente, aporta al desarrollo de guías de laboratorio en estrategias de
control con lógica difusa. Este prototipo contará con un motor de DC, software
LaBVIEW, el controlador de lógica difusa y la interface entre el usuario y el motor.
Formulación del problema:
Construir, para el laboratorio del Programa de ingeniería Electrónica de la
Universidad de San Buenaventura Cali en un período no mayor a un año, un
sistema de control de velocidad de un motor DC usando lógica difusa, apoyado en
la plataforma de LaBVIEW, de tal manera que, puedan realizarse prácticas donde
los estudiantes confronten la teoría estudiada en clase con la respectiva práctica.

14
2. JUSTIFICACIÓN
En los últimos años la tecnología ha tenido un gran avance, sobre todo en el área
de control, apareciendo en los años 60`s hasta nuestros días las aplicaciones
prácticas utilizando soluciones fundamentadas en la lógica difusa mostrándose
como una técnica alternativa en el control de procesos industriales, procesamiento
de imágenes, robótica, electrónica de consumo, en predicción de series de tiempo
(metodologías de archivo y búsqueda de Bases de Datos), investigación
operacional, estrategias de mantenimiento predictivo y en principio como solución
lingüística, ya que esta teoría permite manejar y procesar información de una
manera similar a como lo hace el cerebro humano. La lógica difusa o borrosa, es
un súper conjunto de la lógica clásica convencional que fue extendida para
abarcar el concepto de “parcialmente verdad” (valores entre lo “absolutamente
cierto” y lo “absolutamente erróneo”). Fue introducida en 1965 por el Dr. Lofti
Zadeh de la Universidad de Berkeley en un artículo titulado “Fuzzy sets”, para
modelar el conocimiento subjetivo, que se basa en informes lingüísticos
normalmente imposibles de cuantificar usando los métodos matemáticos
comunes. La utilización de la lógica difusa permite al diseñador procesar
eficazmente los conocimientos objetivos y subjetivos (datos numéricos y
conocimiento expreso de expresiones lingüísticas), aplicados a los problemas de
control en lazo cerrado, disminuyendo así el tiempo de desarrollo del proyecto y
los costos. (Mendel, 1995).
En la actualidad el sistema de lógica difusa lo podemos encontrar en muchos de
los elementos que usamos hasta en nuestros hogares mejorando la comodidad
del humano para desarrollar labores muchas veces básicas y simples como:
En el hogar:
Sistemas de foco automático en cámaras fotográfica
Lavadoras automáticas

15
Aire acondicionado
Hornos microondas
También a un nivel mucho más avanzado e importante para el desarrollo de la
sociedad en cuanto a industria:
Reconocimiento de patrones:
Reconocimiento de voz
Reconocimiento de escritura
Visión por computadora
Reconocimiento óptico de caracteres
Mejora en la eficiencia del uso de combustible en motores
Aplicaciones industriales:
Navegación automática de robots (robot autónomo móvil)
Operación de plantas de cemento
Control de hornos de vidrio
Control de reactores nucleares
Medicina:
Rayos x
Herramientas de endoscopia
Control de presión sanguínea
La construcción de un sistema de control de velocidad de un motor de DC usando
lógica difusa utilizando la plataforma de LaBVIEW para el laboratorio de la
universidad de San Buenaventura Cali, permitirá que el programa de Ingeniería
Electrónica ofrezca espacios de estudio en una de las técnicas de control
inteligente que actualmente se están implementando en el contexto nacional e
internacional.
16
3. OBJETIVOS
3.1 OBJETIVO GENERAL
Construir un sistema de control de velocidad de un motor DC usando lógica
difusa, apoyado en la plataforma de LaBVIEW, para ser implementado
como práctica de laboratorio del Programa de ingeniería Electrónica.
3.2 OBJETIVOS ESPECÍFICOS
3.2.1 Analizar el respectivo estado del arte del control de velocidad de un
motor DC utilizando lógica difusa.
3.2.2 Realizar mediciones usando un tacómetro para determinar la curva
de velocidad contra corriente de inducido del motor.
3.2.3 Diseño del controlador de velocidad usando las reglas de la lógica
difusa.
3.2.4 Diseñar el sistema electrónico que funcionará como Actuador para
ejecutar el control de la velocidad del motor DC
3.2.5 Construir un prototipo de laboratorio de Control Inteligente con Lógica
Difusa.
3.2.6 Plantear tres guías de Laboratorio para el área de lógica difusa
donde se implemente el Control de Velocidad construido.
3.2.7 Validar el Prototipo con el desarrollo de las prácticas propuestas.
17
4. MARCO TEORICO
Resumen: En este trabajo se presenta el análisis y diseño para la simulación en
LaBVIEW, de un control de velocidad difuso para un motor DC empleando el
algoritmo de Mamdani. Se muestra el diseño del control de velocidad tipo el
Mamdani con cinco funciones de pertenencia, usando la interfaz gráfica de
LaBVIEW, además se enseña una revisión bibliográfica entorno al diseño e
implementación de un control de velocidad utilizando lógica difusa y las diferentes
aplicaciones que este desarrollo puede tener en nuestro entorno personal, social y
laboral.
Se exponen diferentes procesos sobre el tema resaltando lo más importante en
cuanto a la idea, creación, desarrollo e implementación del control inteligente;
Finalmente se presentan los resultados obtenidos de cada artículo teniendo en
cuenta la aplicación y la forma de desarrollo para tal fin.
Palabras Claves: Control inteligente, lógica difusa, LaBVIEW, Matlab, reglas,
fuzzificación, defuzzificación, pertenencia, Aplicaciones industriales.
Abstract: This paper presents an analysis and design for simulation in Lab view, a
fuzzy speed control of DC motor using the Mamdani algorithm. Shows the design
of speed control on Mamdani type with seve membership functions, using the
LaBVIEW graphical interface.
Different processes are presented highlighting the most important issue in terms of
idea creation, development and implementation of intelligent control.
Finally, we present the results of each item taking into account the application and
form of development for this purpose.
Keywords: Intelligent control, Fuzzy Logic, LaBVIEW, Matlab, Rules, Fuzzification,
membership, Defuzzification, industrial Aplications.

18
4.1 ANTECEDENTES
En 1965 L. A. Zadeh, profesor de teoría de sistemas de la Universidad de
California en Berkeley publicó un artículo llamado conjuntos difusos, que dio
origen a innumerables artículos sobre lógica difusa, la cual permitió tener una
alternativa programable de control y proceso tecnológico que trata con el tipo de
descripciones subjetivas o ambiguas que son comúnmente usadas en el mundo
real. Cuando Zadeh se dio cuenta que la naturaleza de la lógica booleana, no
tomaba en cuenta los distintos grados de veracidad o falsedad de una proposición
real, expandió la idea de un conjunto clásico del álgebra de Bolean, tomando en
cuenta las infinitas variaciones entre verdad y falso al cual llamó conjunto difuso.
Una vez que la lógica difusa fue inventada en los Estados Unidos, no tuvo gran
desenvolvimiento, ya que fue víctima de múltiples críticas; fue hasta los 70´s que
en Europa se perfeccionó y tuvo sus primeras aplicaciones. En el Queen Mary
College en Londres, Inglaterra, Ebrahim Mamdani, uso los principios de la lógica
difusa para aplicarlo a una máquina de vapor la cual no podía tener bajo control
con las técnicas convencionales hasta esa época, este algoritmo de control
consiste de 3 pasos: Generación de Valores Difusos, Evaluación de Reglas y
Generación de valores reales.
En los 80´s los japoneses aplicaron los principios de la lógica Difusa en una planta
de tratamiento de agua por Fuji Electric en 1983 y un sistema del metro por la
compañía Hitachi que operó en 1987. A mediados de la década, en 1985
Tomohiro Takagi y Michio Sugeno proponen un nuevo modelo de control Difuso
que se emplea en un proceso de limpiado de agua y en un convertidor que se
utiliza en el proceso de hacer acero. En ese mismo año se inventó el primer
circuito integrado Difuso por dos japoneses, Masaki Togai y Hiroyuki Watanabe
que provocó el interés de las empresas en estos circuitos para implementarlos en

19
sus sistemas, este hecho llevó a Japón a ser el principal exportador de aparatos
de la industria con aplicación directa con y hacia para la lógica Difusa [2].
En los 90´s surgieron varios trabajos que han servido como referencia para
entender y desarrollar trabajos sobre la lógica difusa; uno de ellos describe el
análisis, diseño e implementación de un control de excitación para un generador
síncrono por medio de un control difuso; presenta las bases de la lógica Difusa y
la operación de los modelos de control de Mamdani y Takagi – Sugeno aplicados
al control de la excitación de un generador síncrono. Para tal efecto este proyecto
se realizó de la siguiente manera:
La implementación se realizó en una tarjeta de 8 bits y la programación se
desarrollo para un tiempo real multitareas, la cual: a) realiza funciones de
sincronía, b) dispara un puente de transistores, c) realiza un filtro predictivo para
evitar falsos disparos, d) medir el voltaje nominal y de campo del generador e)
comunicarse con una computadora personal y finalmente f) calcular el algoritmo
de control. El prototipo fue probado en un generador de 5KVA, sometido a
cambios de carga, así como a pruebas de corto circuito y liberación de éste [3].
Otro de los autores que contribuyeron al mejoramiento fue H. M. Gerardo Celso
(1997) Empleando el algoritmo de Mamdani presenta el análisis y diseño de un
control difuso de velocidad de un motor de DC con excitación separada, dicho
control se realizó variando el voltaje de armadura y de campo; haciendo un estudio
de un determinado número de funciones de membrecía con el que el control difuso
obtiene mejores resultados. Este trabajo no presentó implementación [4].
En el año de 1999 Basándose en el paquete FUDGE se desarrollo una tarjeta para
el control difuso de velocidad de un motor de DC. En este trabajo se presenta un
sistema de control de velocidad difuso para un motor de DC implementado en un
microcontrolador de Motorola 68HC11 empleando la técnica de Mamdani; dicho
programa determina el ángulo de disparo de los tiristores del semiconvertidor
monofásico controlado por fase permitiendo con ello variar la velocidad del motor
por voltaje de armadura [5].

20
Para principios del siglo XXI (2000) se presenta el modelado y simulación de un
control de velocidad tipo Takagi – Sugeno para un motor de DC con excitación
separada, empleando el software Matlab [6].
En el 2002 Altamirano González Manlio AL; desarrolla una estrategia para el
diseño y análisis del ajuste automático de los parámetros de las funciones de
pertenencia de un control difuso empleando algoritmos genéticos. Esta estrategia
se aplica al control de velocidad de un motor de corriente directa con excitación
separada. El control de la velocidad se lleva a cabo de dos formas, independiente
una de la otra, por medio de la variación del voltaje de armadura ó por medio de la
variación del voltaje de campo [7].
Tres años más tarde de haber presentado el modelado y simulación de un control
de velocidad tipo Takagi-Sugeno, Herrera Espinosa Javier describe el análisis de
diseño y construcción de un regulador de velocidad tipo Takagi – Sugeno para un
arreglo de motor de DC – alternador. El regulador difuso de velocidad se realiza a
través de la variación del voltaje de armadura de DC con el fin de mantener la
frecuencia de 60 Hz en el alternador sujeto a cambios de carga y fallas de corto
circuito.
Se presenta además el algoritmo de sintonización para el regulador difuso, basado
en las relaciones entre los modelos matemáticos de Mamdani, Takagi – Sugeno y
un control proporcional – integral. Se implementa en la tarjeta basada en el
procesador digital de señales (DSP) TMS320F240 de Texas Instrument. El
programa desarrollado permite: a) arrancar el motor de DC - alternador a tensión
reducida; b) medir la velocidad del conjunto del motor de DC – alternador; c) la
comunicación con una computadora personal y; d) cálculo del algoritmo de control
[8].
Por último; para el año 2005 López Calderón Ana Belem implementa un sistema
de control difuso que permite la variación de velocidad de un motor de DC de 1
H.P. empleando la técnica de Mamdani e implementando en la tarjeta MC68HC12
para el control de la velocidad de una máquina tribológica de abrasión seca [9].
21
4.2 LENGUAJES DE PROGRAMACIÓN
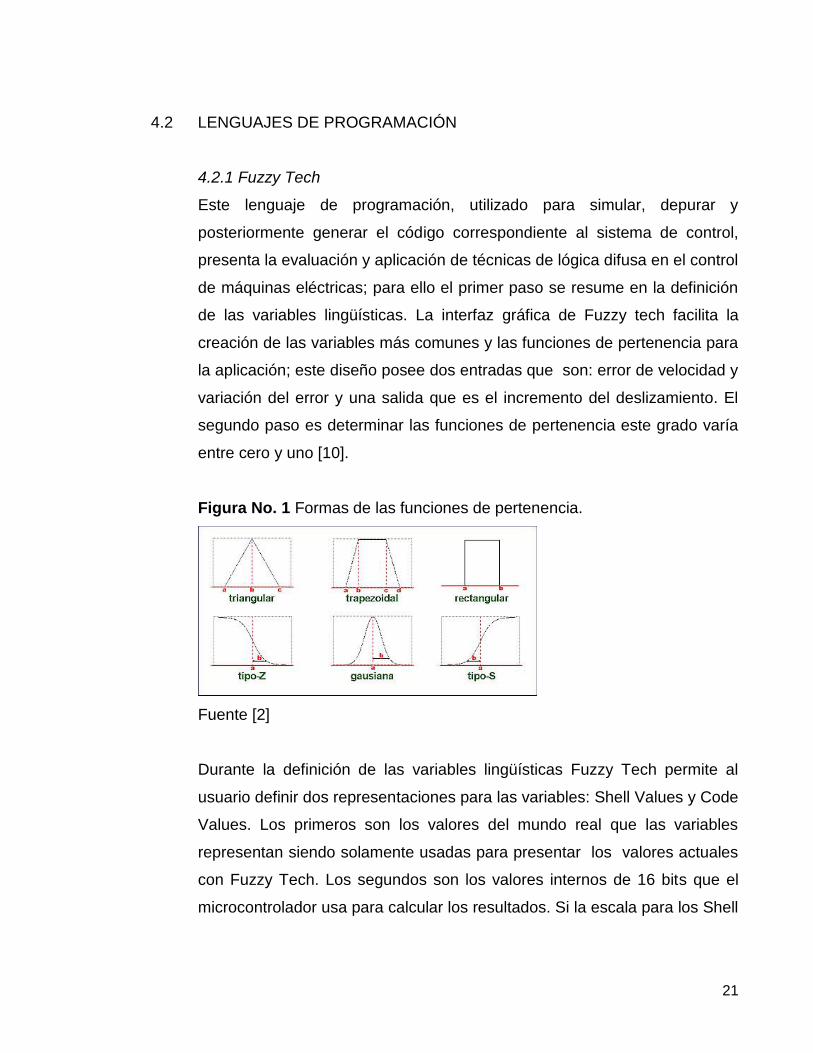
4.2.1 Fuzzy Tech
Este lenguaje de programación, utilizado para simular, depurar y
posteriormente generar el código correspondiente al sistema de control,
presenta la evaluación y aplicación de técnicas de lógica difusa en el control
de máquinas eléctricas; para ello el primer paso se resume en la definición
de las variables lingüísticas. La interfaz gráfica de Fuzzy tech facilita la
creación de las variables más comunes y las funciones de pertenencia para
la aplicación; este diseño posee dos entradas que son: error de velocidad y
variación del error y una salida que es el incremento del deslizamiento. El
segundo paso es determinar las funciones de pertenencia este grado varía
entre cero y uno [10].
Figura No. 1 Formas de las funciones de pertenencia.
Fuente [2]
Durante la definición de las variables lingüísticas Fuzzy Tech permite al
usuario definir dos representaciones para las variables: Shell Values y Code
Values. Los primeros son los valores del mundo real que las variables
representan siendo solamente usadas para presentar los valores actuales
con Fuzzy Tech. Los segundos son los valores internos de 16 bits que el
microcontrolador usa para calcular los resultados. Si la escala para los Shell

22
Values y los Code Values fuese la misma sería más fácil percibir el
comportamiento del control por comparación directa de las entradas/salidas
difusas reales con las variables lingüísticas. La herramienta Fuzzy Tech
proporciona mecanismos fuera de línea (off - line), para depuración (debug),
prueba y optimización de las reglas y funciones de pertenencia. El modo de
depuración interactiva ofrece una verificación gráfica de todas las etapas
del proyecto, el modo batch permite crear un archivo de salida asociado a
un archivo de entrada que contiene una muestra de los valores que esta
puede tener. Usando estas características, el diseñador puede examinar si
todas las reglas establecidas son necesarias, si las reglas importantes no
han sido omitidas y si las variaciones de las variables de salida son
consistentes con el sistema [11].
4.2.2 Matlab
En el proyecto desarrollado por F. Velasco Vega y otros llamado “Modelado
y Simulación de un Control de Velocidad de un motor mediante lógica
difusa” en este artículo se utilizó la herramienta Simulink perteneciente a
Matlab.
4.2.3 Vhdl Fpga
El uso de arquitecturas específicas de procesado implementadas sobre
FPGAs presenta como principales ventajas costo-rendimiento y un ciclo de
desarrollo muy corto a comparación de otras formas de desarrollo. Los
bloques básicos combinacionales de ciertas FPGAs están formados por
pequeñas memorias que actúan como tablas de búsqueda capaces de
implementar cualquier función de un determinado número de entradas. Las
herramientas de diseño suministradas por el fabricante permiten interferir el
uso de memoria a partir de descripciones VHDL genéricas en la etapa de
síntesis y seleccionar el tipo de memoria a utilizar en la etapa de
implementación. La descripción VHDL constituye el punto de partida de las

23
etapas de simulación (Modelsim) y síntesis lógica (FPGA). La selección de
la estrategia empleada para almacenar la base del conocimiento condiciona
el estilo utilizado en las descripciones VHDL de los diferentes módulos del
sistema. La disponibilidad de un flujo de diseño apoyado en herramientas
que permite pasar en cuestión de minutos desde la especificación de un
sistema difuso hasta su implementación en una FPGA, permite explorar el
espacio de diseño en este tipo de sistemas, analizando la influencia de
distintas alternativas arquitecturales y diferentes opciones de
implementación con objeto de optimizar el uso de los recursos que
proporciona los dispositivos existentes.
4.3 MICROCONTROLADOR
Para la implementación de la lógica difusa podemos utilizar diferentes software y
hardware en el cual se pueden realizar las siguientes funciones: reciben los pulsos
enviados por el Encoder del motor mediante un periodo de 60 mSg, este periodo
se estableció de acuerdo con los parámetros del motor. El Timer uno fue
configurado como temporizador de 16 bits para obtener el tiempo correspondiente
al periodo de conteo necesario, el Timer cero fue configurado como contador de
pulsos externos y recibe directamente los pulsos enviados por el Encoder,
después de cumplido el periodo de conteo el valor almacenado en el registro TL0
que representa la velocidad real del motor. Por otra parte recibe los datos
solicitados por el usuario implementado en el CPLD, que representa la velocidad
deseada. El microcontrolador también obtiene el error y el cambio en el error;
después prosigue a direccionar el modulo generador del PWM para alcanzar la
velocidad deseada. Además se usa el lenguaje de programación VHDL e
implementarlo en el hardware con tarjeta CPLD y los siguientes dispositivos: 2
LATCH que cumplen la función de retener la dirección de 16 bits enviada por el
microcontrolador para manejar el modulo generador de PWM. 1 decodificador de
direcciones que recibe el dato enviado por el microcontrolador, que activa la señal

24
para seleccionar el modulo generador de PWM. 1 memoria ROM que contiene los
datos correspondientes a las 1024 posiciones de memoria que componen el
modulo generador de PWM. 1 modulo de PWM que genera constantemente la
salida correspondiente a la modulación por ancho de pulso, ya sea incrementando
o decrementando el ancho y por último 1 codificador de teclado que recibe la señal
correspondiente a cada tecla codificando de acuerdo al formato binario y genera
una sola señal habilitadora [12].
25
5. DESCRIPCIÓN DEL PROCESO
El diagrama de bloques de la figura No. 2, representa el proceso del lazo de
control, donde se encuentra a la entrada el setpoint o referencia de la velocidad
que se desea aplicar al motor, seguido esta el conversor análogo – digital que en
este caso es la tarjeta de adquisición de datos de LaBVIEW.
En la segunda etapa se encuentra el control lógico difuso desarrollado en la
plataforma de LaBVIEW 8.6; siempre hay que hacer uso de la tarjeta de
adquisición de datos ya sea como conversor análogo – digital para la entrada o
como conversor digital – análogo a la salida, cada vez que se realice la operación
del control hacia el motor.
Al salir como una señal análoga hacia el bloque llamado actuador atraviesa por el
puente h que es el circuito que modifica por medio del PWM la velocidad
haciendo que la aumente o disminuya según el setpoint deseado.
El bloque que se conecta contiguo al actuador es la planta, en este caso es el
motor DC existente en el laboratorio.
El tacómetro es la alimentación del sistema para comprobar si la velocidad tiene o
no error, también mostrar al control como debe actuar dependiendo de qué tipo de
error sea y así aumentar o disminuir la salida.

26
Figura No. 2 Lazo Cerrado de Control
5.1 COMPUTADOR / SOFTWARE LABVIEW
LaBVIEW (ver Figura No.3) es el software que se emplea para el desarrollo del
controlador usando sus herramientas y los bloques de Lógica difusa.
Este software utiliza el lenguaje G, donde la G simboliza el lenguaje grafico para
hacer diseño, control y pruebas mediante la existencia de los Kits de Herramientas
o mejor llamados “Toolkits” para facilitar la programación.
Los programas que se desarrollan con LaBVIEW se llaman Instrumentos Virtuales,
o Vis, y su origen provenía del control de instrumentos, aunque hoy en día se ha
expandido ampliamente no sólo al control de todo tipo de electrónica sino también
a su programación embebida.
Es usado principalmente por ingenieros y científicos para tareas como:
Adquisición de datos y análisis matemático
Comunicación y control de instrumentos de cualquier fabricante
Automatización industrial y programación de PACs (Controlador de
Automatización Programable)
Diseño de controladores: simulación, prototipaje rápido, hardware-en-el-
ciclo (HIL) y validación
27
Diseño embebido de micros y chips
Control y supervisión de procesos
Visión artificial y control de movimiento
Robótica
Domótica y redes de sensores inalámbricos
En 2008 el programa fue utilizado para controlar el LHC, el acelerador de
partículas más grande construido hasta la fecha.
Pero también juguetes como el Lego Mindstorms o el WeDo lo utilizan,
llevando la programación gráfica a niños de todas las edades.
Figura No.3 Software de programación LaBVIEW
.
5.2 TARJETA DE AQUISICION DE DATOS
La tarjeta de adquisición de datos como la que se muestra en la Figura No.4,
radica, en coger las señales físicas del proceso, y transformarlas en voltajes
eléctricos y digitalizarlos de manera que se puedan procesar en un computador.
Se requiere una etapa de adecuación, que ajusta la señal a niveles compatibles
con el elemento en este caso la tarjeta de adquisición de datos NI, que hace la
transformación a señal digital.

28
Figura No.4 Tarjeta de adquisición de datos CB-68LP.
5.2.1 Proceso de adquisición de datos
A veces el sistema de adquisición es parte de un sistema de control, y por
tanto la información recibida se procesa para obtener una serie de señales
de control. En la Figura No.5 podemos ver los bloques que componen
nuestro sistema de adquisición de datos:
Figura No.5 Esquema de Bloques del proceso de adquisición de datos.

29
Los bloques principales son estos:
Transductor : es un elemento que convierte la magnitud física que vamos a medir
en una señal de salida (normalmente tensión o corriente) que puede ser
procesada por nuestro sistema.
El acondicionamiento de señal: es la etapa encargada de filtrar y adaptar la señal
proveniente del transductor a la entrada del convertidor analógico / digital.
El convertidor analógico-digital: es un sistema que presenta en su salida una señal
digital a partir de una señal analógica de entrada, (normalmente de tensión)
realizando las funciones de cuantificación y codificación.
La etapa de salida (interfaz con la lógica): es el conjunto de elementos que
permiten conectar el sistema de adquisición de datos con el resto del equipo.
5.3 CONTROLADOR LOGICO DIFUSO
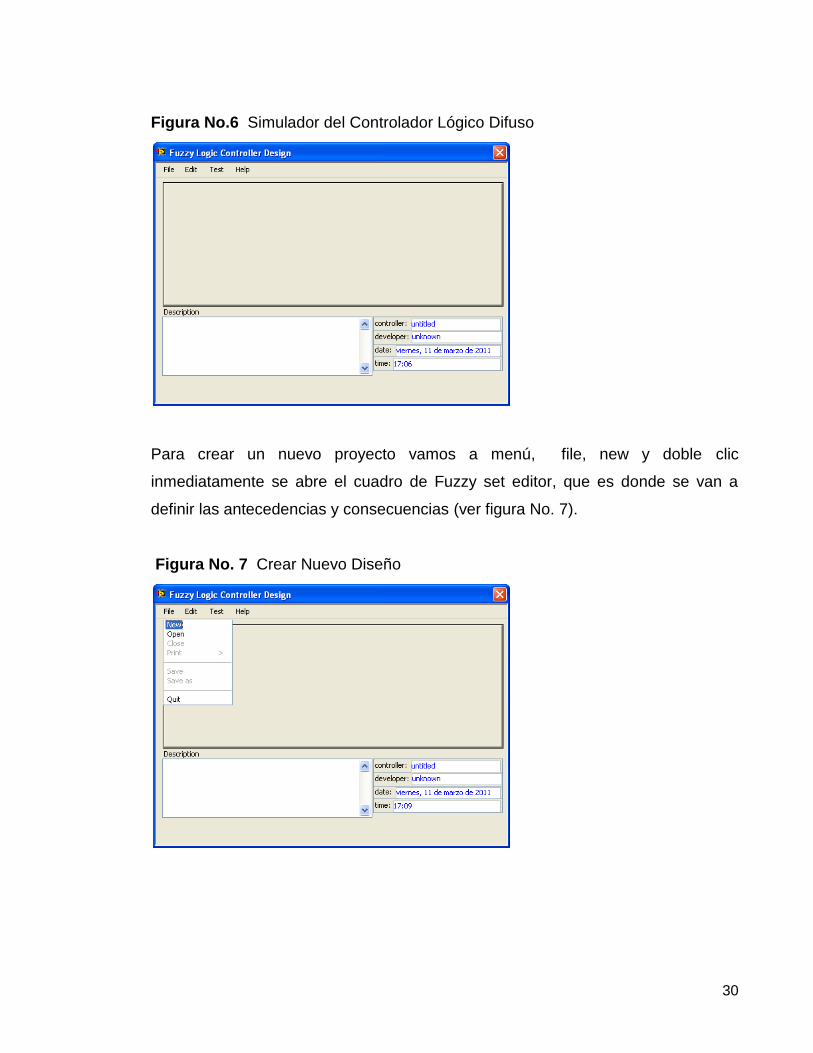
En la figura No.6 se encuentra la pantalla principal para iniciar el diseño de un
nuevo controlador difuso, donde se localizan los campos de descripción del
proyecto, nombre del control, el nombre del diseñador, datos de fecha y hora de
creación del proyecto.
30
Figura No.6 Simulador del Controlador Lógico Difuso
Para crear un nuevo proyecto vamos a menú, file, new y doble clic
inmediatamente se abre el cuadro de Fuzzy set editor, que es donde se van a
definir las antecedencias y consecuencias (ver figura No. 7).
Figura No. 7 Crear Nuevo Diseño

31
En el Fuzzy set editor se ingresaran las variables de entrada, de salida y sus
respectivas variables lingüísticas con rangos de funcionalidad y nos mostrará una
gráfica de las reglas con su respectivo etiquetado.
Fuzzy set editor viene con una configuración predeterminada como se muestra en
la figura No. 8:
Figura No.8 Variables de Entrada
Al desplegar el cuadro se encuentra con las variables lingüísticas de
entrada, cada una de ellas contiene los siguientes términos lingüísticos
predeterminados mostrados en la figura No. 9:
Nex (negativo)
Zox (cero)
POx (término positivismo)
Datos por defecto de rango es: -1 a 1
Los nombres de variable por defecto: INX
con x = 1, ..., 4

32
Figura No. 9 Variables Lingüísticas de Entrada
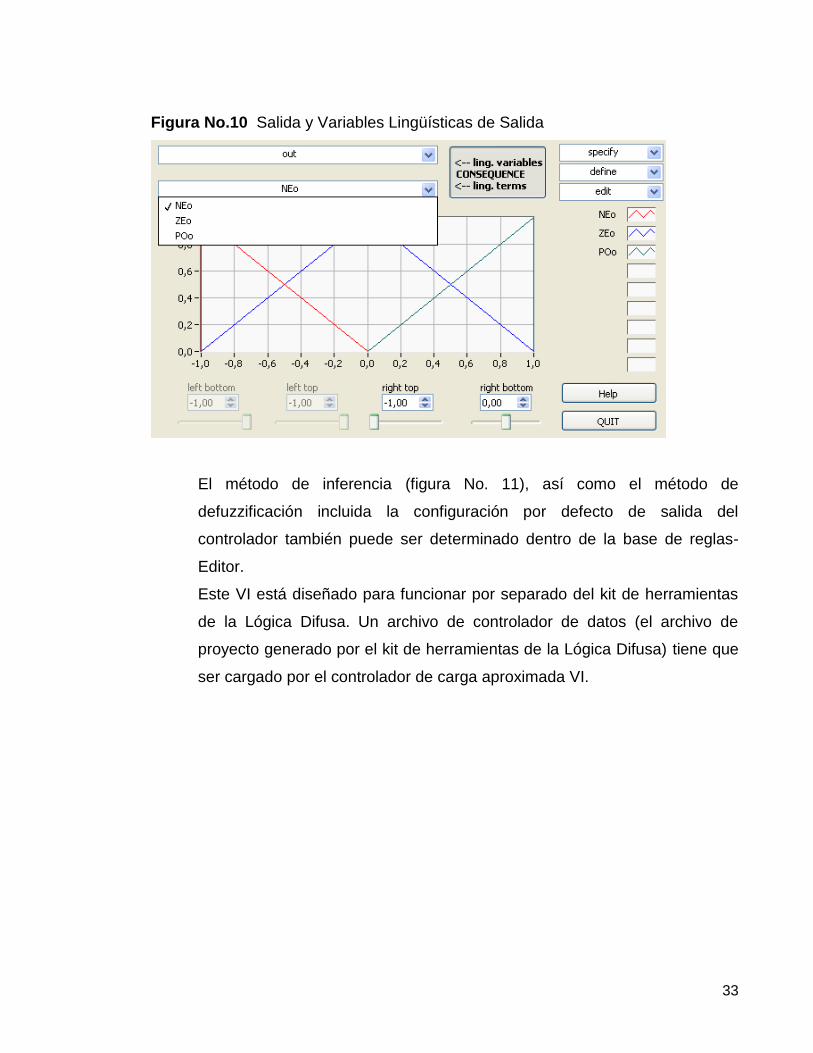
En las consecuencias se encuentra la variable lingüística de salida, que
contiene los siguientes términos lingüísticos, ver figura No.10
Neo (negativo)
Zoo (cero)
Poo (término positivismo)
Datos por defecto de rango es: -1 a 1
Nombre de la variable por defecto: Salida
33
Figura No.10 Salida y Variables Lingüísticas de Salida
El método de inferencia (figura No. 11), así como el método de
defuzzificación incluida la configuración por defecto de salida del
controlador también puede ser determinado dentro de la base de reglas-
Editor.
Este VI está diseñado para funcionar por separado del kit de herramientas
de la Lógica Difusa. Un archivo de controlador de datos (el archivo de
proyecto generado por el kit de herramientas de la Lógica Difusa) tiene que
ser cargado por el controlador de carga aproximada VI.

34
Figura No. 11 Editor de Reglas
Por último se tiene el bloque de características de entrada/salida(Figura No. 12),
que simula el controlador y muestra la gráfica de comportamiento de la salida con
respecto a las reglas implementadas en el editor de reglas.

35
Figura No. 12 Características de entrada/salida
El anterior proceso es para diseñar el controlador difuso, el genera un archivo con
extensión .fc el cual se utiliza en el siguiente bloque (Figura No. 13) para
descargar la información de las reglas ya en el entorno grafico de LaBVIEW. El
bloque de la figura No. 14 es el Controlador difuso el cual ejecuta las reglas y nos
proporciona una salida análoga para la planta.

36
Figura No.13 Cargar Controlador Difuso
Figura No. 14 Controlador Difuso
Controller Data: “Controlador de datos” son los datos almacenados en el
controlador difuso. Todos los datos se archivan en un clúster y debe ser el aporte
de la carga Fuzzy Controller VI.
Name (1, 2….): es el nombre de una de las variables de entrada lingüística.
N es el valor de la entrada correspondiente a la variable de entrada lingüística
especificados por su nombre 1.
Analog Output: salida analógica es la salida del controlador difuso.

37
Output Assessment: evaluación de salida especifica cómo la salida del regulador
se determinó de la siguiente manera: resultado controlada: la producción se
calcula a partir de funciones de pertenencia de entrada y base de reglas.
último resultado: no hay reglas difusas corresponden a los valores de entrada y
salida, es el último valor de salida válida.
resultado de la omisión: no hay reglas difusas corresponden a los valores de
entrada y salida, es el último valor especificado por defecto
Error Array: errores matriz
5.4 ACTUADOR
El PWM o modulación por ancho de pulsos en la figura No. 15, de una señal o
fuente de energía es una técnica en la que se modifica el ciclo de trabajo de una
señal periódica (una sinusoidal o una cuadrada, por ejemplo), ya sea para
transmitir información a través de un canal de comunicaciones o para controlar la
cantidad de energía que se envía a una carga.
Figura No. 15 Salida desde LaBVIEW por PWM
5.5 PUENTE H
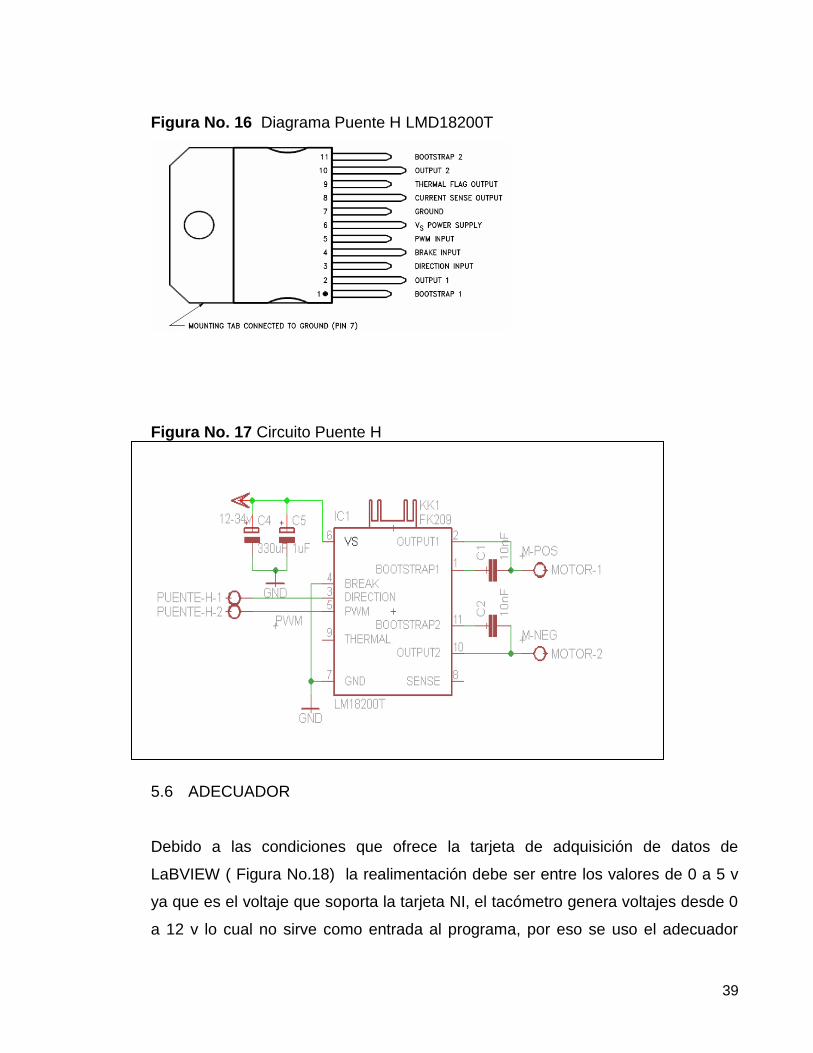
El LMD18200 es un Puente H diseñado para el control de movimiento
aplicaciones. El dispositivo ver Figura No. 16 está construido mediante un

38
proceso multi-tecnología que combina el trazado de circuito de control bipolar y
CMOS con dispositivos de DMOS de alimentación de la misma estructura
monolítica.
Ideal para la conducción de motores de corriente continúa y paso a paso, la
capacidad para LMD18200 es de corrientes de pico de salida de hasta 6A.
Un innovador circuito que facilita la baja pérdida de detección de la corriente de
salida se ha aplicado.
5.5.1 Características
Entrega hasta 3A a la salida continua
Opera en tensiones de alimentación de hasta 55V
Debajo RDS (encendido) normalmente 0,3 W por switch
TTL y CMOS de insumos compatibles
No de "disparar a través de" actual
de alerta térmica de salida del pabellón a 145 ° C n de apagado térmico
(fuera salidas) a 170 ° C
diodos interior abrazadera n protección de la carga en cortocircuito n interna
de la bomba de carga con capacidad de arranque externos
5.5.2 Aplicaciones
DC y las unidades de motor paso a paso
de posición y velocidad de servomecanismos
los robots de automatización de fábrica
de maquinaria de control numérico
equipo impresoras y plotters.
39
Figura No. 16 Diagrama Puente H LMD18200T
Figura No. 17 Circuito Puente H
5.6 ADECUADOR
Debido a las condiciones que ofrece la tarjeta de adquisición de datos de
LaBVIEW ( Figura No.18) la realimentación debe ser entre los valores de 0 a 5 v
ya que es el voltaje que soporta la tarjeta NI, el tacómetro genera voltajes desde 0
a 12 v lo cual no sirve como entrada al programa, por eso se uso el adecuador
40
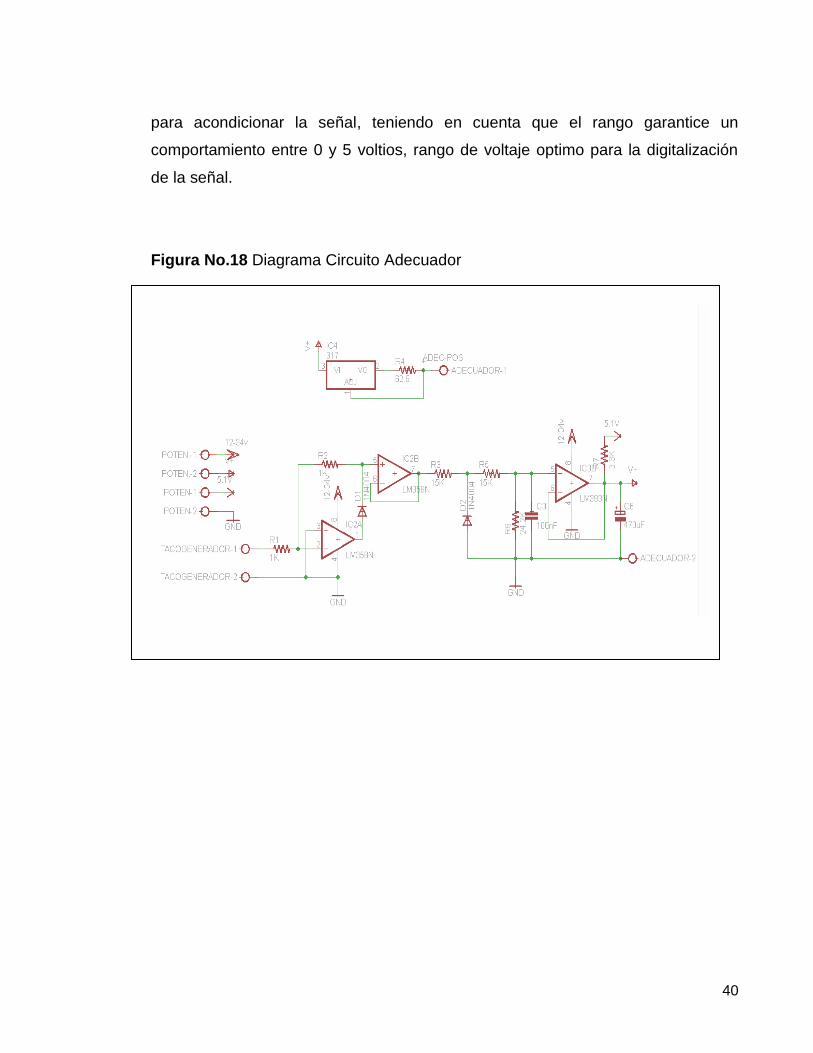
para acondicionar la señal, teniendo en cuenta que el rango garantice un
comportamiento entre 0 y 5 voltios, rango de voltaje optimo para la digitalización
de la señal.
Figura No.18 Diagrama Circuito Adecuador

41
Figura No. 19 Diseño Final del Circuito de Adecuación
Figura No. 20 Tarjeta Circuito Adecuador y Puente H

42
Figura 21. Prototipo Final del Actuador y Adecuador
5.7 PLANTA
Figura No. 22 Motor DC
43
5.7.1 Respuesta del Motor en Lazo Abierto
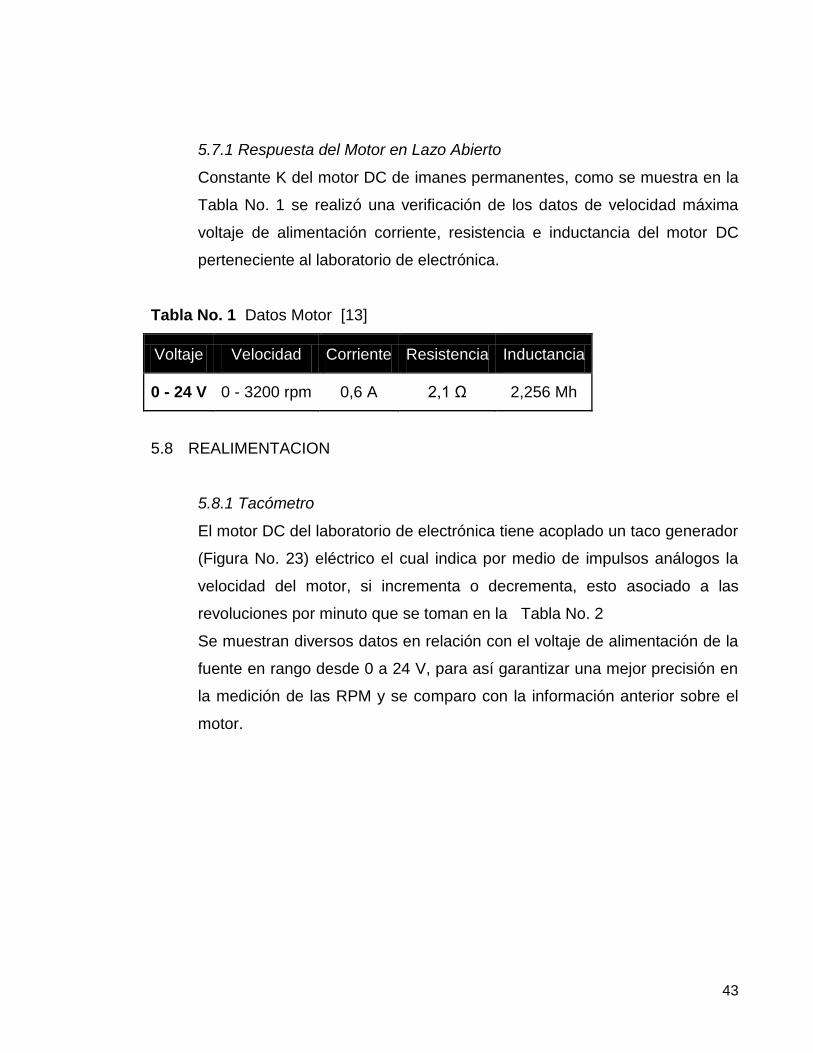
Constante K del motor DC de imanes permanentes, como se muestra en la
Tabla No. 1 se realizó una verificación de los datos de velocidad máxima
voltaje de alimentación corriente, resistencia e inductancia del motor DC
perteneciente al laboratorio de electrónica.
Tabla No. 1 Datos Motor [13]
Voltaje Velocidad Corriente Resistencia Inductancia
0 - 24 V 0 - 3200 rpm 0,6 A 2,1 Ω 2,256 Mh
5.8 REALIMENTACION
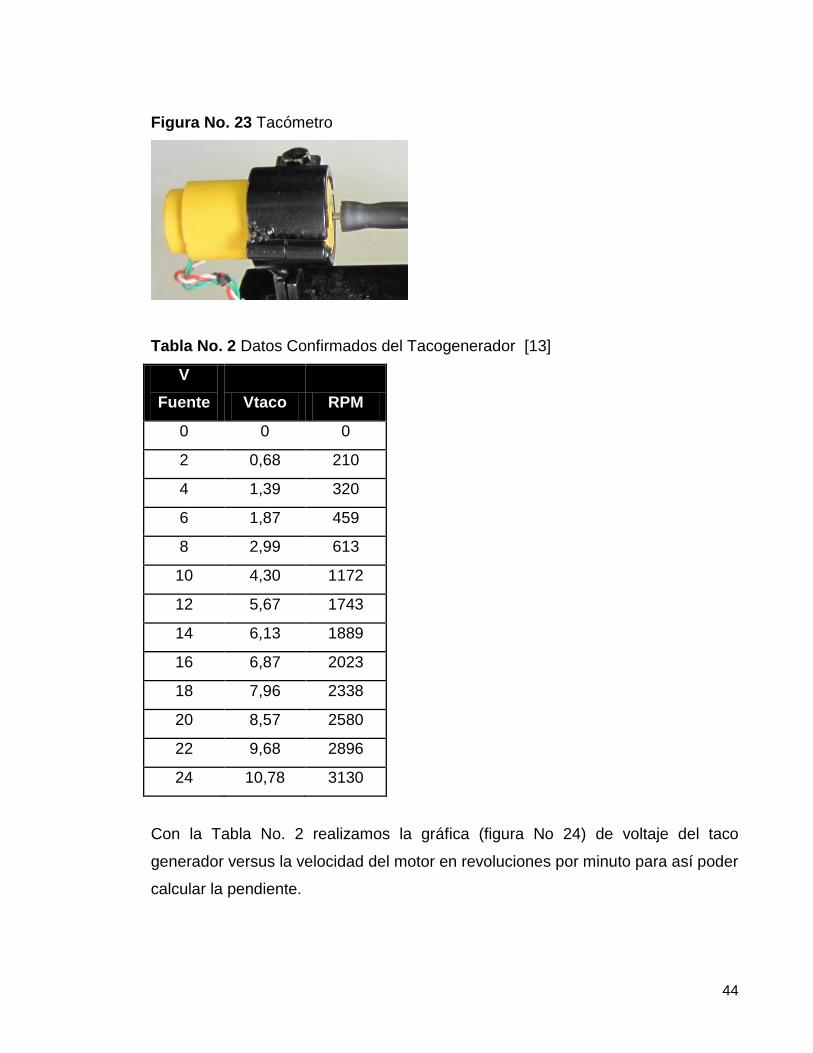
5.8.1 Tacómetro
El motor DC del laboratorio de electrónica tiene acoplado un taco generador
(Figura No. 23) eléctrico el cual indica por medio de impulsos análogos la
velocidad del motor, si incrementa o decrementa, esto asociado a las
revoluciones por minuto que se toman en la Tabla No. 2
Se muestran diversos datos en relación con el voltaje de alimentación de la
fuente en rango desde 0 a 24 V, para así garantizar una mejor precisión en
la medición de las RPM y se comparo con la información anterior sobre el
motor.
44
Figura No. 23 Tacómetro
Tabla No. 2 Datos Confirmados del Tacogenerador [13]
V
Fuente Vtaco RPM
0 0 0
2 0,68 210
4 1,39 320
6 1,87 459
8 2,99 613
10 4,30 1172
12 5,67 1743
14 6,13 1889
16 6,87 2023
18 7,96 2338
20 8,57 2580
22 9,68 2896
24 10,78 3130
Con la Tabla No. 2 realizamos la gráfica (figura No 24) de voltaje del taco
generador versus la velocidad del motor en revoluciones por minuto para así poder
calcular la pendiente.

45
Figura No.24 Gráfica Voltaje Tacogenerado vs. Velocidad RPM
Tabla No.3 Datos Confirmados del Adecuador [13]
V (Taco) Vade RPM
0 0 0
0,65 0,289 207
1,09 0,478 320
1,57 0,768 457

46
2,08 0,936 609
4,00 1,79 1168
5,98 2,617 1745
6,43 2,839 1898
6,91 3,1 2019
7,86 3,48 2347
8,87 3,99 2585
9,98 4,34 2903
10,32 4,52 3129
Al igual que en la figura anterior, se usa la Tabla No. 3 para realizar la gráfica
(Figura No 25) de voltaje del taco generador versus el voltaje del Adecuador que
se sabe que va en un rango de 0 a 5 para así poder calcular la pendiente.
Figura No. 25 Gráfica Voltaje Tacogenerador vs. Voltaje Adecuador
47
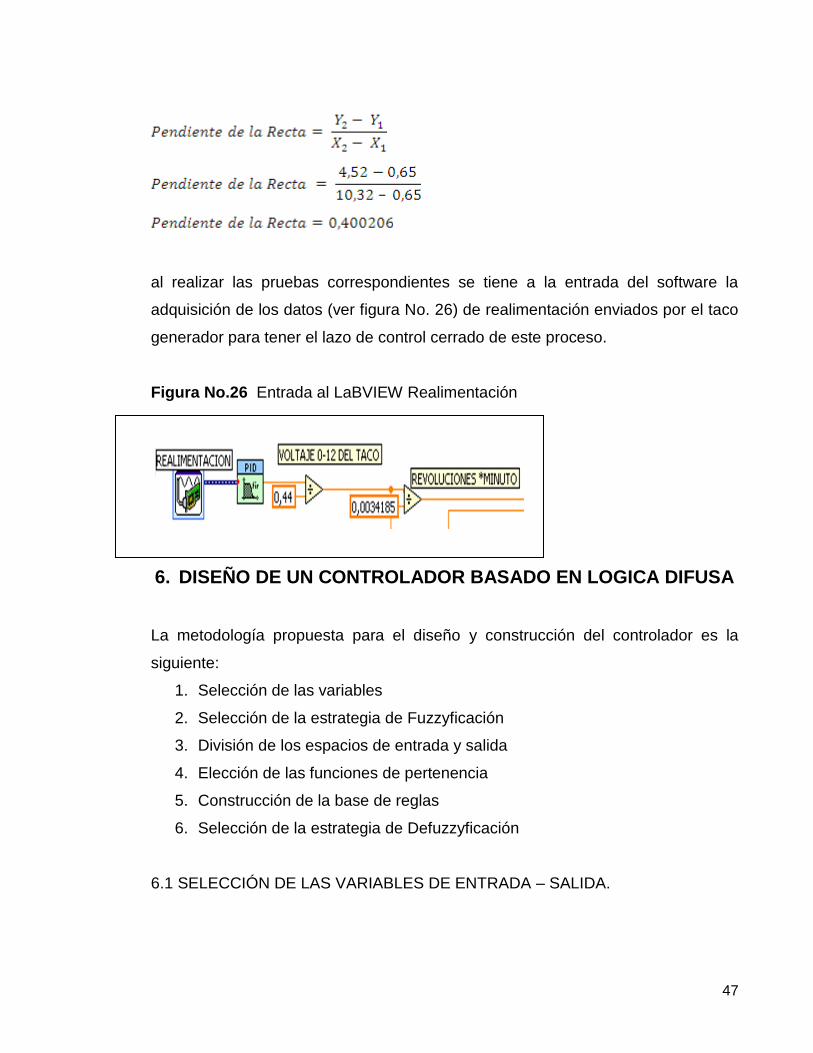
al realizar las pruebas correspondientes se tiene a la entrada del software la
adquisición de los datos (ver figura No. 26) de realimentación enviados por el taco
generador para tener el lazo de control cerrado de este proceso.
Figura No.26 Entrada al LaBVIEW Realimentación
6. DISEÑO DE UN CONTROLADOR BASADO EN LOGICA DIFUSA
La metodología propuesta para el diseño y construcción del controlador es la
siguiente:
1. Selección de las variables
2. Selección de la estrategia de Fuzzyficación
3. División de los espacios de entrada y salida
4. Elección de las funciones de pertenencia
5. Construcción de la base de reglas
6. Selección de la estrategia de Defuzzyficación
6.1 SELECCIÓN DE LAS VARIABLES DE ENTRADA – SALIDA.

48
El primer paso a seguir como en cualquier lazo de control para su diseño,
es tener claro cuáles son las variables de entrada y salida que queremos
relacionar a través del controlador.
Figura No.27 Lazo Cerrado de Control
En el caso del motor DC las variables son:
Tabla No. 4 Selección Variables de Entrada y Salida
VARIABLE DE
ENTRADA
(0 – 12 V)
VARIABLE DE
SALIDA
(0 – 100%)
ERROR PWM
ΔERROR
6.2 GRADO DE PERTENENCIA DE LAS VARIABLES.

49
El segundo paso es determinar el grado de pertenencia de las variables de
entrada a los conjuntos difusos. Se trata de desarrollar un bloque que tendrá en
las entradas un valor los valores numéricos y a la salida dichos valores asociados
a los conjuntos difusos correspondientes a las funciones de pertenencia escogidas
en el diseño.
El error deseado en un lazo de control es cero (ZE), por eso en el diseño le damos
un mayor grado de pertenencia a la variable lingüística ZERO que en este caso
será 0.5
El algoritmo de Mamdami, figura No 28 es el más usado en las aplicaciones
sistemas dinámicos, dado que tiene una estructura muy simple de operaciones de
mínimos – máximos.
En los algoritmos en general se identifican estos principales pasos a seguir:
1. Identificar el problema: variables de entrada, salida o estados.
2. Ordenar las variables: Declarar los intervalos, precisión, etc.
3. Particionado de los universos de discurso de entradas y salida (granularidad).
4. Construcción de la base de las reglas.
5. Establecer la ecuación de los diferentes conjuntos difusos del antecedente y
consecuente.
6. Ajuste de parámetros del modelo
7. Validación del modelo.

50
Figura No. 28 Algoritmo de Mandani
La cantidad de conjuntos difusos del universo de discurso es decisión del
diseñador directamente. En la práctica es recomendable escoger varias etiquetas
lingüísticas, se suele escoger mínimo 2 hasta 10 etiquetas lingüísticas por cada
variable de entrada o salida.
Cuantas más etiquetas lingüísticas se escojan, mayor poder descriptivo y
flexibilidad tendrá el lenguaje, aunque teniendo en cuenta que a mayor numero de
etiquetas lingüísticas mayor complejidad para desarrollar las reglas que involucran
el sistema.
6.3 VARIABLES LINGUISTICAS DE ENTRADA.
Para este diseño se escogen siete reglas lingüísticas mostradas en la tabla No. 5
que describen el comportamiento del motor.

51
Tabla No. 5 Motor
VARIABLES LINGUISTICAS DE ENTRADA
PP Positivo Pequeño NP Negativo Pequeño ZE Cero
PM Positivo Mediano NM Negativo Mediano
PG Positivo Grande NG Negativo Grande
Se utiliza funciones triangulares en el controlador obteniendo así funciones de
pertenencia para todo el dominio de posibles valores de entrada como se puede
ver en la figura No. 29
Figura No. 29 Funciones Triangulares de Entrada
6.4 VARIABLES LINGUISTICAS DE SALIDA.
Se escogen diferentes nombres para las etiquetas de salida así en la tabla No. 6
que describen el comportamiento del PWM donde aumenta o disminuye la
velocidad del motor.
Tabla No. 6 Variables Lingüísticas de Salida
VARIABLES LINGUISTICAS DE SALIDA
AT Aumento Total DT Disminuya Total ZE Cero
AM Aumento Moderado DM Disminuya Moderado

52
AP Aumento Poco DP Disminuya Poco
Para poder establecer las reglas de salida es preciso realizar una división del
dominio de posibles valores de salida, en este caso las velocidades de rotación,
(figura No. 30) creando así una serie de conjuntos difusos en RPM denominados
de la siguiente forma:
DT: disminuye total, 0-800
DM: disminuye moderado, 400-1200
DP: disminuye poco, 800-1600
ZE: cero, 1200-2000
AP: aumento poco, 1600-2400
AM: aumento moderado, 2000-2800
AT: aumento total, 2400-3200
Figura No. 30 Funciones Triangulares de Salida en RPM
6.5 CUANTIFICADOR DEL ERROR.
Cuantificación del error y del incremento del error, (tabla No. 7) el Adecuador nos
envía señales entre 0 – 5 voltios que es lo que soporta la tarjeta de adquisición de
datos.

53
Tabla No. 7 Cuantificación del error
NIVEL RANGO
1 0 – 1.25
2 0.625 – 1.875
3 1.25 – 2.5
4 1.875 – 3.125
5 2.5 – 3.75
6 3.125 – 4.375
7 3.75 – 5
Para este proyecto (figura No. 31), la salida del controlador tienen que ser por
medio del PWM, para llegar hasta la planta, que tiene que hacer la
Defuzzyficación en el rango de 0 a 100.
Figura No. 31 Funciones Triangulares de Salida para el PWM
En las áreas A1, A5, A9 de la figura No. 32 e0 es positivo y creciente en los tres
casos ΔE es positivo también.

54
Figura No. 32 Análisis del error
Tabla No. 8 Seguimiento del error y cambio del error
E + + - -
ΔE + - - +
Si el error es Positivo Tabla No. 8, entonces quiere decir que la velocidad de
salida es menor que la velocidad establecida en el setpoint (referencia).
Si el error es Negativo entonces quiere decir que la velocidad de salida es mayor
que la velocidad establecida en el setpoint (referencia).
Si la pendiente del error es positiva entonces quiere decir que la velocidad en la
salida esta disminuyendo.
Si la pendiente del error es negativa entonces quiere decir que la velocidad en la
salida esta aumentando.
La acción de control para la salida es aumentar, mantener o disminuir la velocidad
para llegar al valor deseado.

55
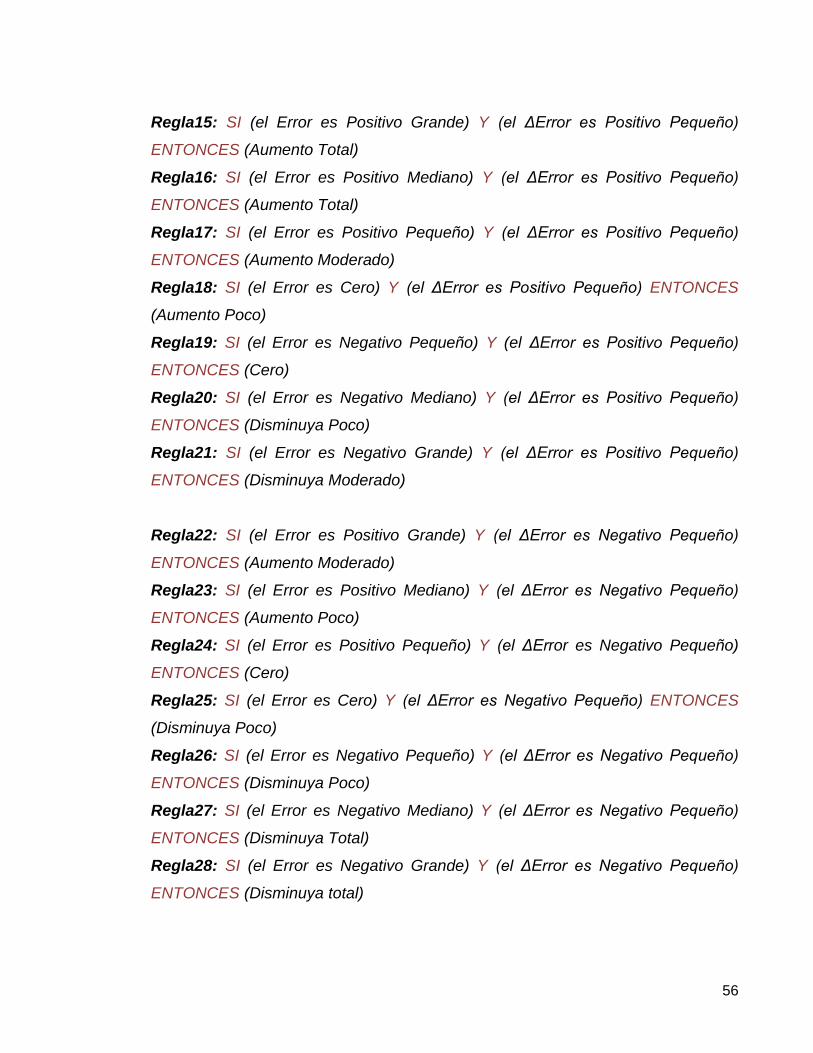
6.6 DISEÑO DE REGLAS
Regla1: SI (el Error es Positivo Grande) Y (el ΔError es Positivo Grande)
ENTONCES (Aumento Total)
Regla2: SI (el Error es Positivo Mediano) Y (el ΔError es Positivo Grande)
ENTONCES (Aumento Total)
Regla3: SI (el Error es Positivo Pequeño) Y (el ΔError es Positivo Grande)
ENTONCES (Aumento Total)
Regla4: SI (el Error es Cero) Y (el ΔError es Positivo Grande) ENTONCES
(Aumento Total)
Regla5: SI (el Error es Negativo Pequeño) Y (el ΔError es Positivo Grande)
ENTONCES (Aumento Moderado)
Regla6: SI (el Error es Negativo Mediano) Y (el ΔError es Positivo Grande)
ENTONCES (Aumento Poco)
Regla7: SI (el Error es Negativo Grande) Y (el ΔError es Positivo Grande)
ENTONCES (Cero)
Regla8: SI (el Error es Positivo Grande) Y (el ΔError es Positivo Mediano)
ENTONCES (Aumento Total)
Regla9: SI (el Error es Positivo Mediano) Y (el ΔError es Positivo Mediano)
ENTONCES (Aumento Total)
Regla10: SI (el Error es Positivo Pequeño) Y (el ΔError es Positivo Mediano)
ENTONCES (Aumento Total)
Regla11: SI (el Error es Cero) Y (el ΔError es Positivo Mediano) ENTONCES
(Aumento Moderado)
Regla12: SI (el Error es Negativo Pequeño) Y (el ΔError es Positivo Mediano)
ENTONCES (Aumento Poco)
Regla13: SI (el Error es Negativo Mediano) Y (el ΔError es Positivo Mediano)
ENTONCES (Cero)
Regla14: SI (el Error es Negativo Grande) Y (el ΔError es Positivo Mediano)
ENTONCES (Disminuya Poco)
56
Regla15: SI (el Error es Positivo Grande) Y (el ΔError es Positivo Pequeño)
ENTONCES (Aumento Total)
Regla16: SI (el Error es Positivo Mediano) Y (el ΔError es Positivo Pequeño)
ENTONCES (Aumento Total)
Regla17: SI (el Error es Positivo Pequeño) Y (el ΔError es Positivo Pequeño)
ENTONCES (Aumento Moderado)
Regla18: SI (el Error es Cero) Y (el ΔError es Positivo Pequeño) ENTONCES
(Aumento Poco)
Regla19: SI (el Error es Negativo Pequeño) Y (el ΔError es Positivo Pequeño)
ENTONCES (Cero)
Regla20: SI (el Error es Negativo Mediano) Y (el ΔError es Positivo Pequeño)
ENTONCES (Disminuya Poco)
Regla21: SI (el Error es Negativo Grande) Y (el ΔError es Positivo Pequeño)
ENTONCES (Disminuya Moderado)
Regla22: SI (el Error es Positivo Grande) Y (el ΔError es Negativo Pequeño)
ENTONCES (Aumento Moderado)
Regla23: SI (el Error es Positivo Mediano) Y (el ΔError es Negativo Pequeño)
ENTONCES (Aumento Poco)
Regla24: SI (el Error es Positivo Pequeño) Y (el ΔError es Negativo Pequeño)
ENTONCES (Cero)
Regla25: SI (el Error es Cero) Y (el ΔError es Negativo Pequeño) ENTONCES
(Disminuya Poco)
Regla26: SI (el Error es Negativo Pequeño) Y (el ΔError es Negativo Pequeño)
ENTONCES (Disminuya Poco)
Regla27: SI (el Error es Negativo Mediano) Y (el ΔError es Negativo Pequeño)
ENTONCES (Disminuya Total)
Regla28: SI (el Error es Negativo Grande) Y (el ΔError es Negativo Pequeño)
ENTONCES (Disminuya total)

57
Regla29: SI (el Error es Positivo Grande) Y (el ΔError es Negativo Mediano)
ENTONCES (Aumento Poco)
Regla30: SI (el Error es Positivo Mediano) Y (el ΔError es Negativo Mediano)
ENTONCES (Cero)
Regla31: SI (el Error es Positivo Pequeño) Y (el ΔError es Negativo Mediano)
ENTONCES (Disminuya Poco)
Regla32: SI (el Error es Cero) Y (el ΔError es Negativo Mediano) ENTONCES
(Disminuya Moderado)
Regla33: SI (el Error es Negativo Pequeño) Y (el ΔError es Negativo Mediano)
ENTONCES (Disminuya Total)
Regla34: SI (el Error es Negativo Mediano) Y (el ΔError es Negativo Mediano)
ENTONCES (Disminuya Total)
Regla35: SI (el Error es Negativo Grande) Y (el ΔError es Negativo Mediano)
ENTONCES (Disminuya Total)
Regla36: SI (el Error es Positivo Grande) Y (el ΔError es Negativo Grande)
ENTONCES (Cero)
Regla37: SI (el Error es Positivo Mediano) Y (el ΔError es Negativo Grande)
ENTONCES (Disminuya Poco)
Regla38: SI (el Error es Positivo Pequeño) Y (el ΔError es Negativo Grande)
ENTONCES (Disminuya Moderado)
Regla39: SI (el Error es Cero) Y (el ΔError es Negativo Grande) ENTONCES
(Disminuya Total)
Regla40: SI (el Error es Negativo Pequeño) Y (el ΔError es Negativo Grande)
ENTONCES (Disminuya Total)
Regla41: SI (el Error es Negativo Mediano) Y (el ΔError es Negativo Grande)
ENTONCES (Disminuya Total)
Regla42: SI (el Error es Negativo Grande) Y (el ΔError es Negativo Grande)
ENTONCES (Disminuya Total)

58
Regla43: SI (el Error es Positivo Grande) Y (el ΔError es Cero) ENTONCES
(Aumento Total)
Regla44: SI (el Error es Positivo Mediano) Y (el ΔError es Cero) ENTONCES
(Aumento Moderado)
Regla45: SI (el Error es Positivo Pequeño) Y (el ΔError es Cero) ENTONCES
(Aumento Poco)
Regla46: SI (el Error es Cero) Y (el ΔError es Cero) ENTONCES (Cero)
Regla47: SI (el Error es Negativo Pequeño) Y (el ΔError es Cero) ENTONCES
(Disminuya Poco)
Regla48: SI (el Error es Negativo Mediano) Y (el ΔError es Cero) ENTONCES
(Disminuya Moderado)
Regla49: SI (el Error es Negativo Grande) Y (el ΔError es Cero) ENTONCES
(Disminuya Total)
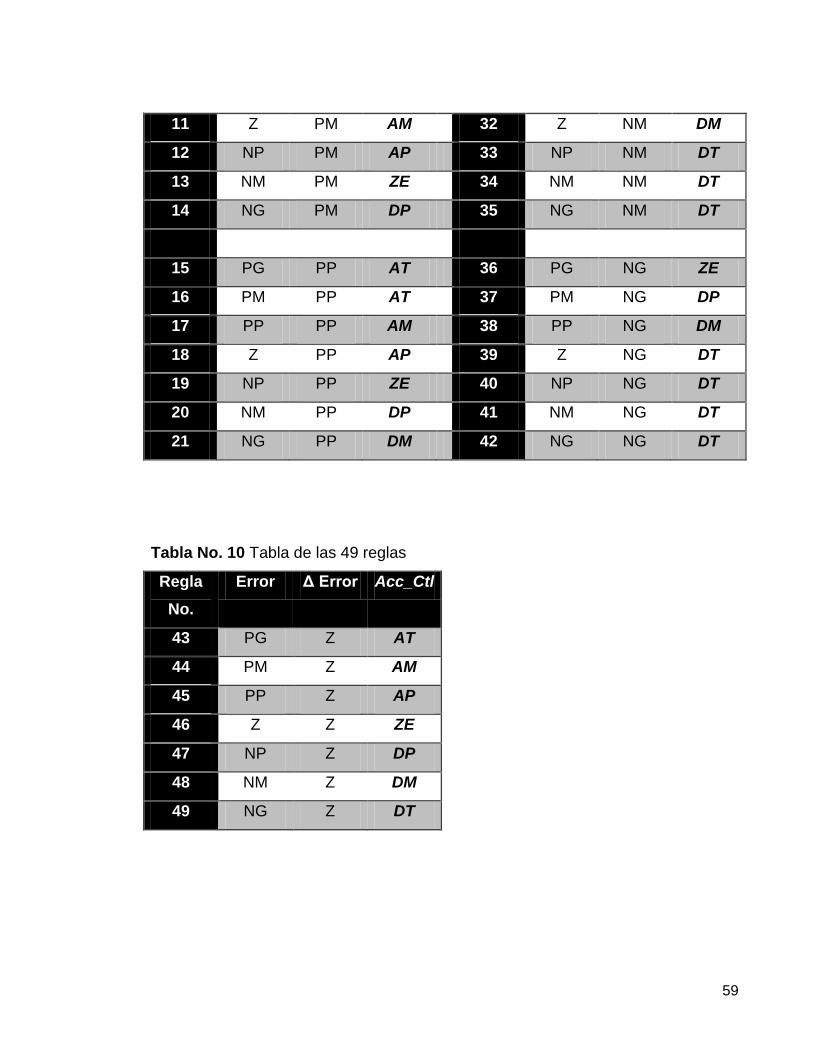
Tabla No. 9 Matriz de reglas
Regla
No.
Error Δ Error Acc_Ctl Regla
No.
Error Δ Error Acc_Ctl
1 PG PG AT 22 PG NP AM
2 PM PG AT 23 PM NP AP
3 PP PG AT 24 PP NP ZE
4 Z PG AT 25 Z NP DP
5 NP PG AM 26 NP NP DM
6 NM PG AP 27 NM NP DT
7 NG PG ZE 28 NG NP DT
8 PG PM AT 29 PG NM AP
9 PM PM AT 30 PM NM ZE
10 PP PM AT 31 PP NM DP
59
11 Z PM AM 32 Z NM DM
12 NP PM AP 33 NP NM DT
13 NM PM ZE 34 NM NM DT
14 NG PM DP 35 NG NM DT
15 PG PP AT 36 PG NG ZE
16 PM PP AT 37 PM NG DP
17 PP PP AM 38 PP NG DM
18 Z PP AP 39 Z NG DT
19 NP PP ZE 40 NP NG DT
20 NM PP DP 41 NM NG DT
21 NG PP DM 42 NG NG DT
Tabla No. 10 Tabla de las 49 reglas
Regla
No.
Error Δ Error Acc_Ctl
43 PG Z AT
44 PM Z AM
45 PP Z AP
46 Z Z ZE
47 NP Z DP
48 NM Z DM
49 NG Z DT

60
Tabla No. 11 Matriz de inferencias
E
CE
NG NM NP ZE PP PM PG
PG ZE AP AM AT AT AT AT
PM DP ZE AP AM AT AT AT
PP DM DP ZE AP AM AT AT
ZE DT DM DP ZE AP AM AT
NP DT DT DM DP ZE AP AM
NM DT DT DT DM DP ZE AP
NG DT DT DT DT DM DP ZE
6.7 ESTRATEGIA DE DEFUZZYFICACIÓN.
Por último se selecciona la estrategia a utilizar para el proceso de Defuzzyficación.
En este diseño desarrolla el método de la media ponderada, la cual trata de
realizar el cálculo del promedio entre los valores de salida que se obtendrían para
cada uno de los conjuntos difusos multiplicados (ponderado) por el peso del grado
de pertenencia del subconjunto.
Al principio del diseño se definen los pesos de cada variable lingüística para
proceder a calcular la defuzzificación por medio del método ponderado.

61
7. DISEÑO DE UN CONTROLADOR BASADO EN LOGICA
DIFUSA IMPLEMENTADO EN LA PLATAFORMA LABVIEW
En la Figura No. 33 se encuentran los bloques característicos de los indicadores y
controles, como son el While Loop donde se crean y se ejecutan todo el conjunto
de bloques para que trabaje en forma continua, DAQ Assistant Express VI el
bloque de adquisición de datos desde la tarjeta NI externa, Merge Signals
Function es el indicador grafico donde muestra la señal del setpoint (roja), señal
de control (verde) y la respuesta del motor (azul), Shift Registers and the
Feedback Node in Loops utilizados para crear retardos de tiempo y así calcular el
cambio del error, Time Domain Math Express VI se usa para realizar operaciones
matemáticas en el tiempo, en este caso se integrará el CAMBIO DEL PWM y
obtener la salida entre el rango deseado, Strip Path Function mantiene la ruta del
archivo generado por el diseñador con extensión .fc, Simulate Signal Express VI
simula la onda cuadrada para el PWM, Fuzzy Logic Controller, Load Fuzzy
Controller y el Set point. El conjunto de todos los bloques se encuentra encerrado
por un While Loop, el cual es el encargado de ejecutar todo lo que hay en su
interior de forma continua.

62
Figura No. 33 Diagrama de bloques del control de velocidad en LaBVIEW
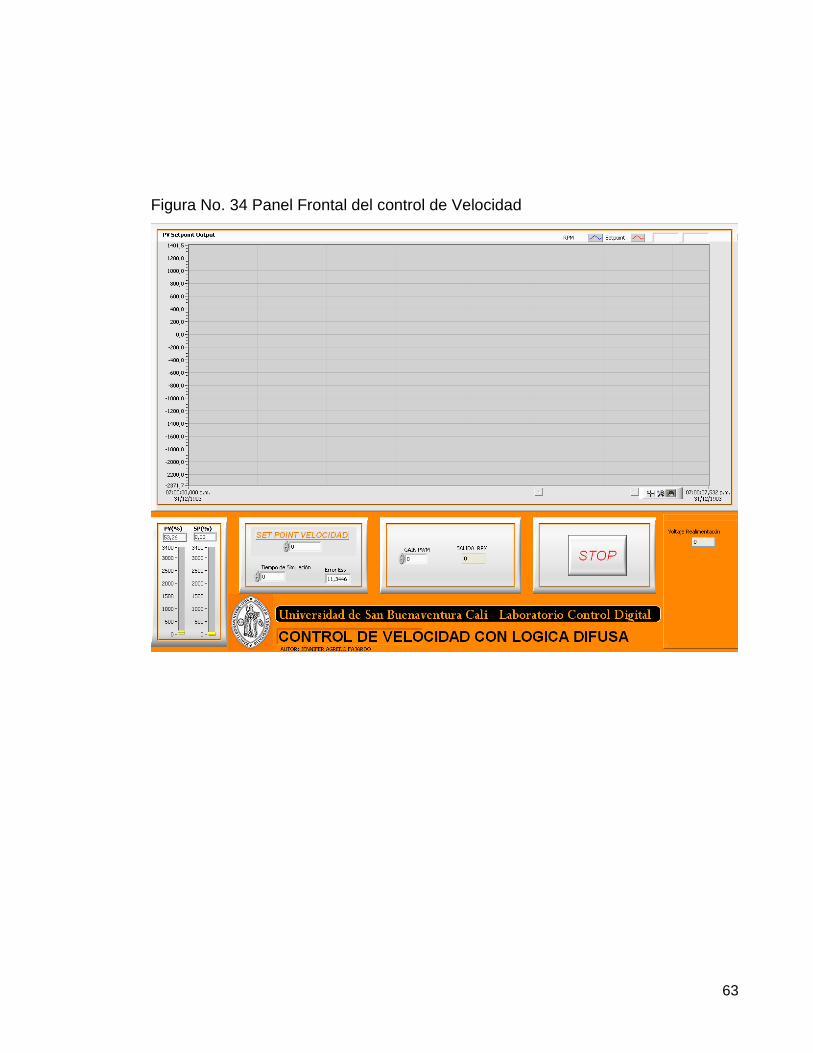
En la figura No. 34 se encuentra la vista del panel frontal que es desde donde el
usuario ejecuta el programa y se observan los resultados por medio de una gráfica
así como también los valores obtenidos después de la acción de control.
63
Figura No. 34 Panel Frontal del control de Velocidad

64
8. GUIAS DE LABORATORIO
Se presenta el diseño de tres guías para experimentar en el laboratorio el diseño
y control inteligente para que aporte nuestros conocimientos a los estudiantes.

65
8.1 GUIA DE LABORATORIO No. 1
UNIVERSIDAD DE SAN BUENAVENTURA - CALI
Programa de Ingeniería Electrónica
LABORATORIO DE CONTROL DIGITAL
PRÁCTICA 1: INTRODUCCION AL CONTROL LOGICO DIFUSO EN LA
PLATAFORMA DE LaBVIEW
8.1.1 Objetivos
Diseñar un controlador lógico difuso mediante las técnicas vistas en
clase.
Aprender a utilizar los bloques básicos de LaBVIEW y las herramientas
de diseño de controladores lógicos difusos.
Implementar el controlador en la plataforma de simulación en LaBVIEW.
Realizar pruebas simuladas desde la ventana de diseño.

66
8.1.2 Equipos e Instrumentos
1 PC con LaBVIEW y Controlador instalados.
8.1.3 Marco Teórico
Revisar el procedimiento descrito para conocer el diseñador de control difuso
que nos muestra el software de LabVIEW, en la tesis “IMPLEMENTACIÓN
DE CONTROL DE VELOCIDAD DE UN MOTOR DC UTILIZANDO LÓGICA
DIFUSA USANDO LA PLATAFORMA DE LABVIEW”, que se encuentra en la
biblioteca de la universidad.
8.1.4 Guía de Trabajo
Diseñar un control usando lógica difusa para controlar el nivel de un tanque
existente en el laboratorio de electrónica.
Sugerencia: Realizar un proceso de control manual del tanque para saber el
volumen, las dimenciones, el tiemo de respuesta, etc.
A partir de la tesis IMPLEMENTACIÓN DE CONTROL DE VELOCIDAD DE
UN MOTOR DC UTILIZANDO LÓGICA DIFUSA USANDO LA PLATAFORMA
DE LABVIEW, puede ser usada para diseñar el control.
Definir las variables de entrada y salida, definir las variables lingüísticas
(máximo 5), establecer las reglas y los grados de pertenencia.

67
En la figura anterior se muestra el diagrama de bloques del Lazo de Control
Cerrado para controlar el nivel de un tanque.
8.1.4.1 Procedimiento
Para realizar el diseño del controlador difuso en LaBVIEW abrir el software,
crear un proyecto en blanco, ir a la barra de menú, clic en TOOLS buscar
CONTROL Design And Simulation, Fuzzy Logic Controller Design, donde se
abrirá la ventana de diseño del controlador.
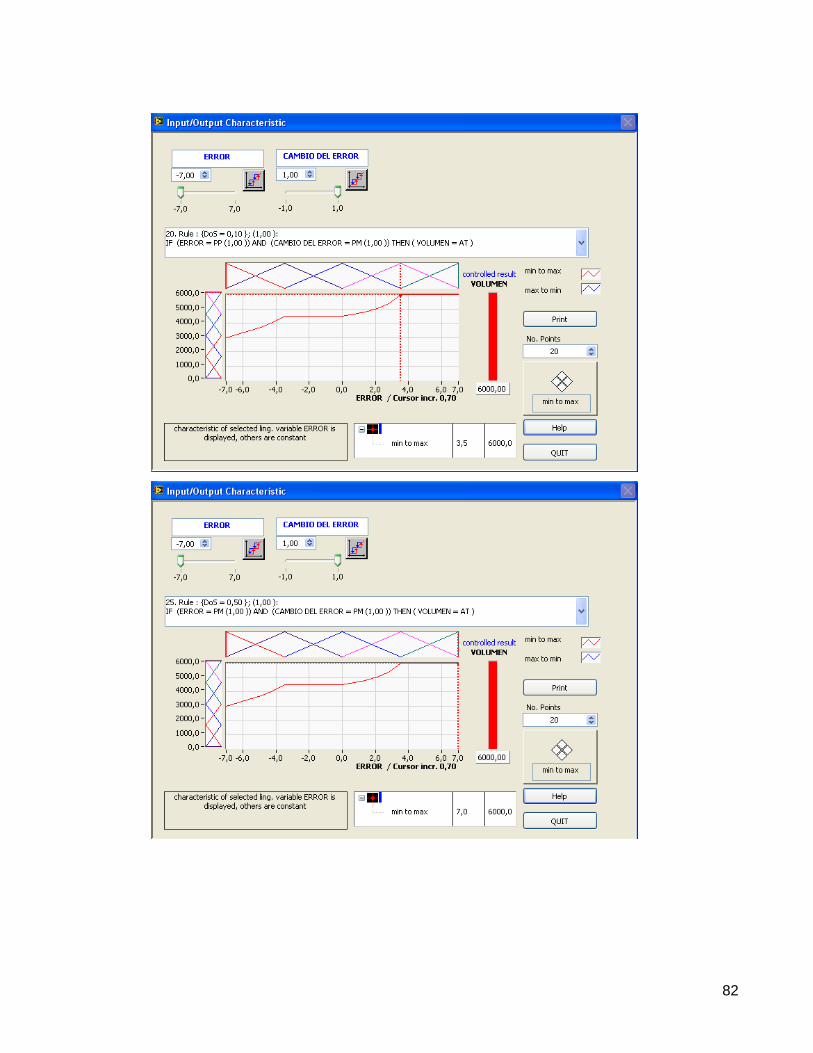
Seguir los pasos descritos en el marco teórico al realizar el proceso de
selección y organización de las reglas, entrar a características de entrada y
salida donde se realizan las simulaciones del controlador mostrando
gráficamente la respuesta a la salida.
Realizar las pruebas y completar la siguiente tabla con los valores que se
generen a la salida del controlador, anexar pantallazo de la ventana de
características de entrada/salida con sus respectivas gráficas.
Tabla de Pruebas de datos de Salida
e ∆e PG PP Z NP NG
PG
PP
Z
NP
NG
¿Qué puede concluir con este ejercicio?
68
8.1.4.2 Preguntas teóricas
Realiza una breve comparación entre el control clásico y el control
inteligente.
Cuantas entradas y salidas se pueden poner en la interfaz gráfica
de lógica difusa?
8.1.4.3 Preguntas para resolver en el laboratorio
Realice el diagrama de control en lazo cerrado indicando las partes
que componen un controlador.
Diseñar las tres etapas que componen el controlador difuso
(fuzzificación, inferencia, defuzzificación).
Enumerar 3 ventajas y 3 desventajas del controlador difuso
8.1.5 Informe Práctica No 1
Un trabajo escrito previo a la práctica con los siguientes elementos:
Portada de presentación.
Tema y objetivos de la práctica.
Listado de equipos, materiales y dispositivos a utilizar.
Procedimiento detallado de la práctica a desarrollar.
Cálculos previos descritos en el procedimiento.
Simulación de la práctica a través del software requerido.
Solución teórica de las preguntas hechas en la guía de laboratorio.
Espacio para conclusiones y/o observaciones.
Consigne de manera clara los resultados obtenidos en el
procedimiento, y responda las preguntas planteadas.

69
INFORME PRÁCTICA No 1: INTRODUCCION AL CONTROL LOGICO DIFUSO
EN LA PLATAFORMA DE LaBVIEW
JENNIFER AGREDO FAJARDO
UNIVERSIDAD DE SAN BUENAVENTURA CALI
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA
LABORATORIO DE ELECTRÓNICA APLICADA – LEA
SANTIAGO DE CALI
2011
70
OBJETIVOS
Diseñar un controlador lógico difuso mediante las técnicas vistas en clase.
Aprender a utilizar los bloques básicos de LaBVIEW y las herramientas de
diseño de controladores lógicos difusos.
Implementar el controlador en la plataforma de simulación en LaBVIEW.
Realizar pruebas simuladas desde la ventana de diseño.
EQUIPOS E INSTRUMENTOS
1 PC con LaBVIEW y Controlador instalados.
DISEÑO CONTROLOLADOR DIFUSO
Selección Variables de Entrada y Salida
VARIABLE DE ENTRADA VARIABLE DE SALIDA
ERROR LITROS
ΔERROR
Variables Lingüísticas de entrada.
Para este diseño se escogen cinco reglas lingüísticas mostradas a
continuación.

71
VARIABLES LINGUISTICAS DE ENTRADA
PP Positivo Pequeño NP Negativo Pequeño ZE Cero
PM Positivo Mediano NM Negativo Mediano
Grado de Pertenencia de las Variables
Se utiliza funciones triangulares en el controlador obteniendo así funciones de
pertenencia para todo el dominio de posibles valores de entrada
Funciones Triangulares de Entrada
Variables lingüísticas de salida.
Se escogen diferentes nombres para las etiquetas de salida para una mejor
comprensión en la matriz de reglas.

72
VARIABLES LINGUISTICAS DE SALIDA
AT Aumento Total DT Disminuya Total ZE Cero
AM Aumento Moderado DM Disminuya Moderado
Funciones Triangulares de Salida
.
DISEÑO DE REGLAS
Regla1: SI (el Error es Positivo Mediano) Y (el ΔError es Positivo Mediano)
ENTONCES (Aumento Total)
Regla2: SI (el Error es Positivo Pequeño) Y (el ΔError es Positivo Mediano)
ENTONCES (Aumento Total)
Regla3: SI (el Error es Cero) Y (el ΔError es Positivo Mediano) ENTONCES
(Aumento Moderado)
Regla4: SI (el Error es Negativo Pequeño) Y (el ΔError es Positivo Mediano)
ENTONCES (Aumento Moderado)
Regla5: SI (el Error es Negativo Mediano) Y (el ΔError es Positivo Mediano)
ENTONCES (Cero)

73
Regla6: SI (el Error es Positivo Mediano) Y (el ΔError es Positivo Pequeño)
ENTONCES (Aumento Total)
Regla7: SI (el Error es Positivo Pequeño) Y (el ΔError es Positivo Pequeño)
ENTONCES (Aumento Moderado)
Regla8: SI (el Error es Cero) Y (el ΔError es Positivo Pequeño) ENTONCES
(Aumento Moderado)
Regla9: SI (el Error es Negativo Pequeño) Y (el ΔError es Positivo Pequeño)
ENTONCES (Aumento Cero)
Regla10: SI (el Error es Negativo Mediano) Y (el ΔError es Positivo Pequeño)
ENTONCES (Disminuya Moderado)
Regla11: SI (el Error es Positivo Mediano) Y (el ΔError es Cero) ENTONCES
(Aumento Moderado)
Regla12: SI (el Error es Positivo Pequeño) Y (el ΔError es Cero) ENTONCES
(Aumento Moderado)
Regla13: SI (el Error es Cero) Y (el ΔError es Cero) ENTONCES (Cero)
Regla14: SI (el Error es Negativo Pequeño) Y (el ΔError es Cero) ENTONCES
(Disminuya Moderado)
Regla15: SI (el Error es Negativo Mediano) Y (el ΔError es Cero) ENTONCES
(Disminuya Total)
Regla16: SI (el Error es Positivo Mediano) Y (el ΔError es Negativo Pequeño)
ENTONCES (Aumento Moderado)
Regla17: SI (el Error es Positivo Pequeño) Y (el ΔError es Negativo Pequeño)
ENTONCES (Cero)
Regla18: SI (el Error es Cero) Y (el ΔError es Negativo Pequeño) ENTONCES
(Disminuya Moderado)
Regla19: SI (el Error es Negativo Pequeño) Y (el ΔError es Negativo Pequeño)
ENTONCES (Disminuya Moderado)

74
Regla20: SI (el Error es Negativo Mediano) Y (el ΔError es Negativo Pequeño)
ENTONCES (Disminuya Total)
Regla21: SI (el Error es Positivo Mediano) Y (el ΔError es Negativo Mediano)
ENTONCES (Cero)
Regla22: SI (el Error es Positivo Pequeño) Y (el ΔError es Negativo Mediano)
ENTONCES (Disminuya Moderado)
Regla23: SI (el Error es Cero) Y (el ΔError es Negativo Mediano) ENTONCES
(Disminuya Moderado)
Regla24: SI (el Error es Negativo Pequeño) Y (el ΔError es Negativo Mediano)
ENTONCES (Disminuya Total)
Regla25: SI (el Error es Negativo Mediano) Y (el ΔError es Negativo Mediano)
ENTONCES (Disminuya Moderado)
Matriz de inferencias
E
CE
NM NP ZE PP PM
PM ZE AM AM AT AT
PP DM ZE AM AM AT
ZE DM DM ZE AM AM
NP DT DM DM ZE AM
NM DT DT DM DM ZE
Estrategia de Defuzzyficación. Por último se selecciona la estrategia a utilizar
para el proceso de Defuzzyficación.
En este diseño desarrolla el método de la media ponderada, la cual trata de
realizar el cálculo del promedio entre los valores de salida que se obtendrían para
cada uno de los conjuntos difusos multiplicados (ponderado) por el peso del grado
de pertenencia del subconjunto.

75
Al principio del diseño se definen los pesos de cada variable lingüística para
proceder a calcular la defuzzificación por medio del método ponderado.
PROCEDIMIENTO
Para realizar el diseño del controlador difuso en LaBVIEW abrir el software, crear
un proyecto en blanco, ir a la barra de menú, clic en TOOLS buscar CONTROL
Design And Simulation, Fuzzy Logic Controller Design, donde se abrirá la ventana
de diseño del controlador.
Seguir los pasos descritos en el marco teórico al realizar el proceso de selección y
organización de las reglas, entrar a características de entrada y salida donde se
realizan las simulaciones del controlador mostrando gráficamente la respuesta a la
salida.
Funciones triangulares del error en el editor de variables de entrada del LaBVIEW.
Funciones triangulares del cambio del error en el editor de variables de entrada del
LaBVIEW.
76
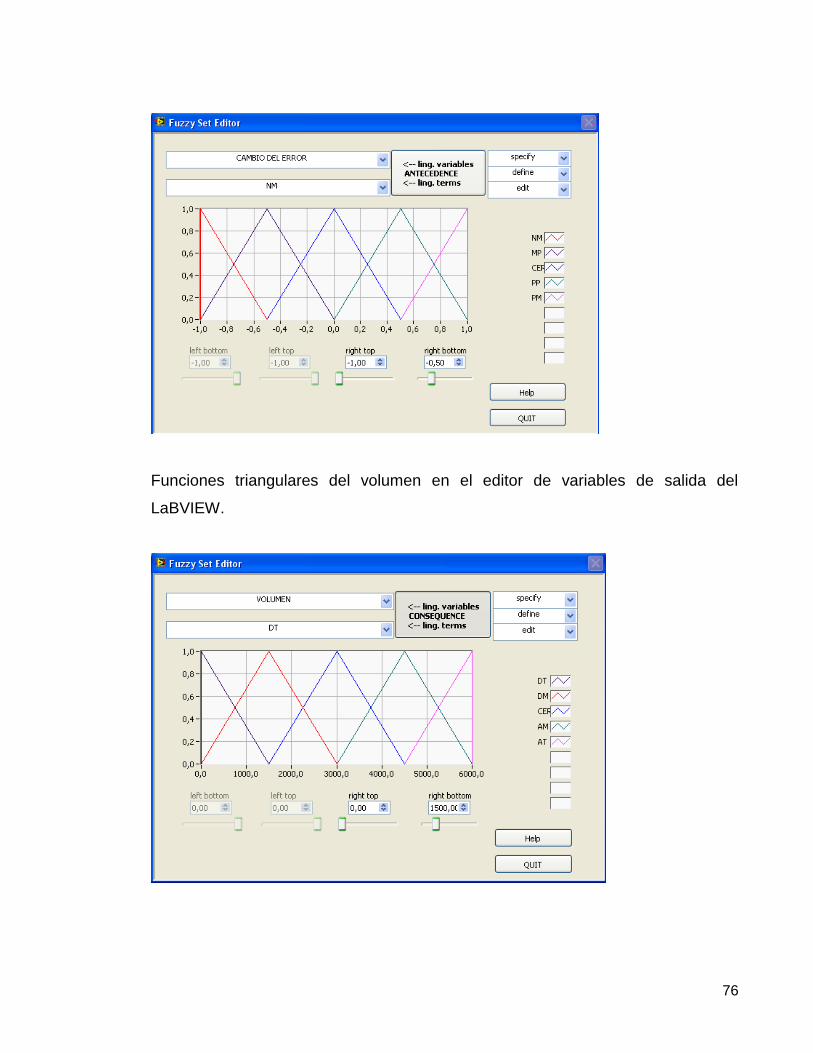
Funciones triangulares del volumen en el editor de variables de salida del
LaBVIEW.

77
Realizar las pruebas y completar la siguiente tabla con los valores que se generen
a la salida del controlador, anexar pantallazo de la ventana de características de
entrada/salida con sus respectivas gráficas.
78
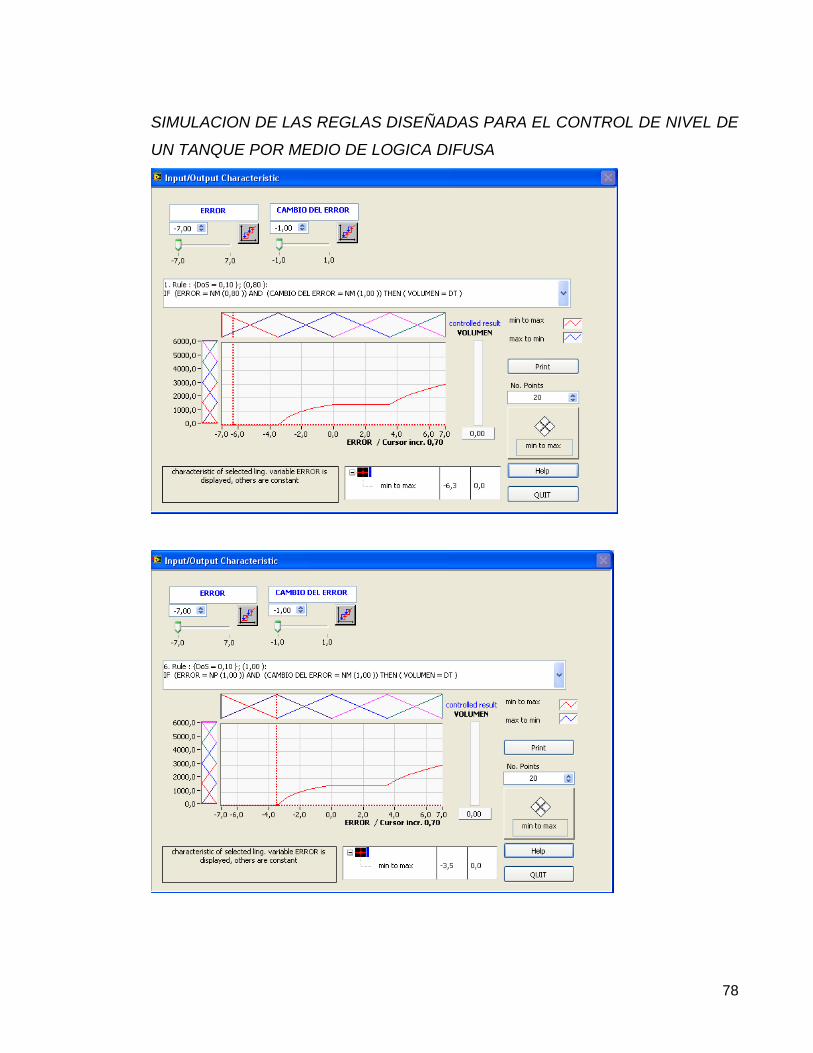
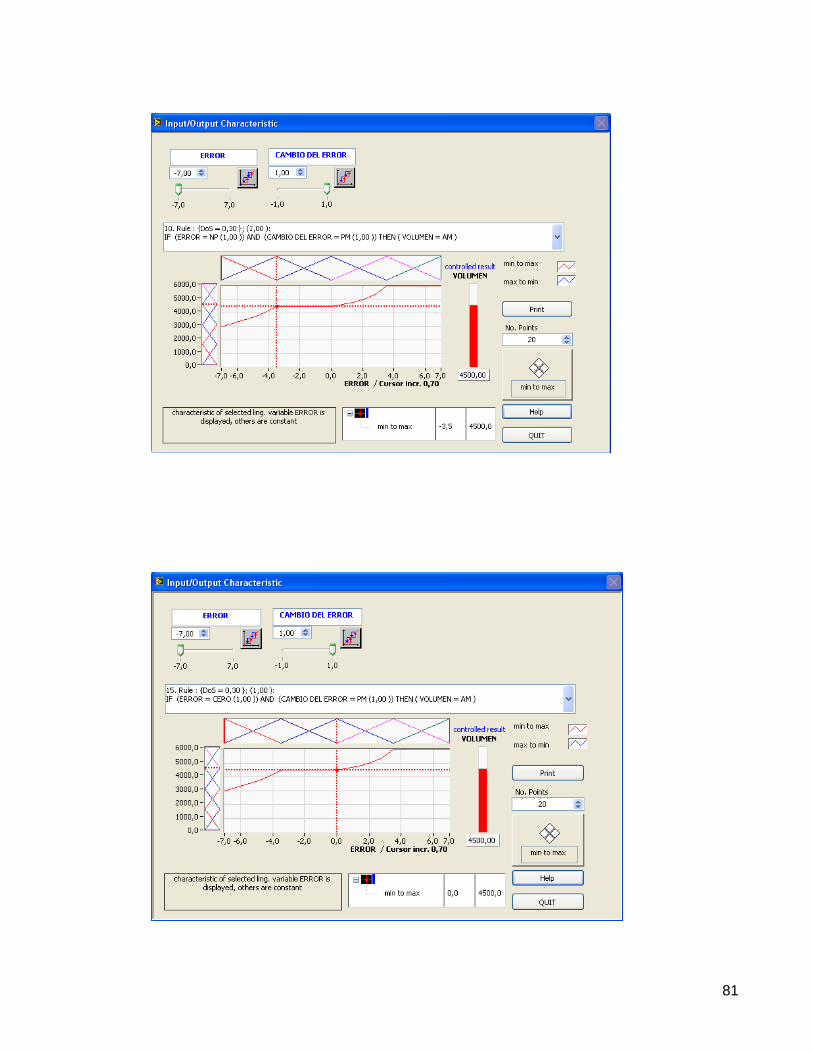
SIMULACION DE LAS REGLAS DISEÑADAS PARA EL CONTROL DE NIVEL DE
UN TANQUE POR MEDIO DE LOGICA DIFUSA

79

80
81
82
83
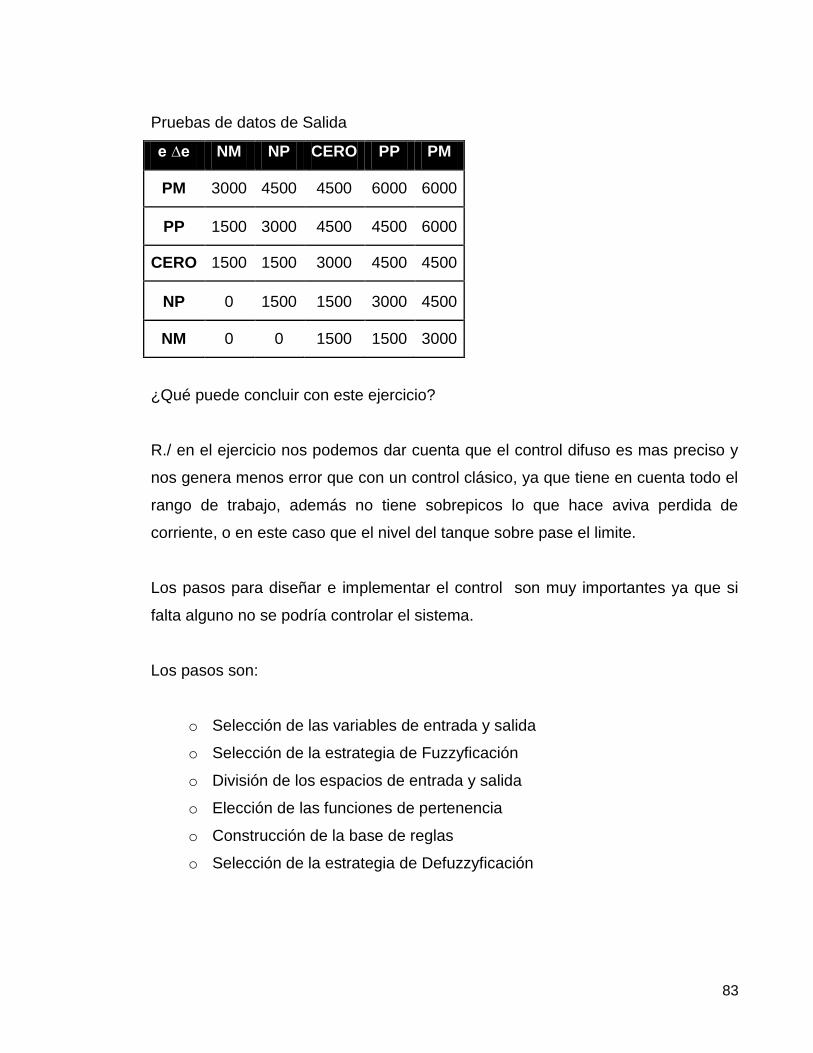
Pruebas de datos de Salida
e ∆e NM NP CERO PP PM
PM 3000 4500 4500 6000 6000
PP 1500 3000 4500 4500 6000
CERO 1500 1500 3000 4500 4500
NP 0 1500 1500 3000 4500
NM 0 0 1500 1500 3000
¿Qué puede concluir con este ejercicio?
R./ en el ejercicio nos podemos dar cuenta que el control difuso es mas preciso y
nos genera menos error que con un control clásico, ya que tiene en cuenta todo el
rango de trabajo, además no tiene sobrepicos lo que hace aviva perdida de
corriente, o en este caso que el nivel del tanque sobre pase el limite.
Los pasos para diseñar e implementar el control son muy importantes ya que si
falta alguno no se podría controlar el sistema.
Los pasos son:
o Selección de las variables de entrada y salida
o Selección de la estrategia de Fuzzyficación
o División de los espacios de entrada y salida
o Elección de las funciones de pertenencia
o Construcción de la base de reglas
o Selección de la estrategia de Defuzzyficación

84
Respuesta a las Preguntas teóricas
Realiza una breve comparación entre el control clásico y el control inteligente.
R./ El uso del control clásico como es el control PID el cual posee una ganancia
fija la cual se establece en la función de transferencia, en la mayoría de los casos
hasta el momento ha sido una buena alternativa para controlar sistemas; ya que
proporcionan períodos de respuesta muy rápidos. Pero la desventaja más grande
que se presenta es entre mayor sea la precisión requerida por la planta en el
sistema el control es más difícil, ya que son bastante sensibles al ruido.
Cuando el sistema es no lineal el control tiene que tener la capacidad de hacer
una compensación al sistema lo cual el PID no tiene la capacidad de hacer ya que
él asume que el sistema es lineal.
En el control clásico se esboza utilizando los modelos matemáticos del sistema
físico el cual captura el procedimiento del sistema y lo crea en una ecuación
matemática con la cual se realiza el controlador.
Hoy en día donde la tecnología ha tenido una gran demanda, se requiere que
para controlar los sistemas también se planteen controladores más sofisticados i
así cerciorar el desempeño del proceso en el ámbito profesional.
El sistema de control lógico difuso es íntegro, basado en la capacidad de un
sistema para realizar de forma inmediata cambios para su funcionamiento y en el
conocimiento lingüístico entregado por el diseñador.
Cuantas entradas y salidas se pueden poner en la interfaz gráfica de lógica difusa
R./ ventajas y desventajas del control lógico difuso
Ventajas

85
o La implementación es simple, utilizando las reglas verbales del tipo
(si….,y……,entonces….).
o El procedimiento de un sistema difuso es entendible para las personas ya
que está hecho con variables lingüísticas usadas en la cotidianidad.
o Por su gran contenido en software, evita el desarrollo dispendioso y
complicado de una descripción matemática comparada con métodos
convencionales.
Desventajas
o Las reglas con escaso conocimiento, resultan en soluciones erradas e
imprecisas en el sistema.
o Habitualmente no posee adaptabilidad y capacidad de aprendizaje
cuando el comportamiento del sistema cambia.
o El esquema del controlador requiere de experiencia y comprensión de la
planta debido a los varios grados de libertad.
8.1.6 Conclusiones
Se consiguió efectuar el controlador difuso para un motor DC en el l sistema
LaBVIEW, el mismo que cumple favorablemente con las especificaciones técnicas
solicitadas en esta práctica.
Los efectos derivados de esta práctica otorgan una respuesta satisfactoria, exacta
y rápida para el sistema, cuándo éste es sometido a leves perturbaciones dentro
del rango presentado en las especificaciones técnicas. Los efectos vistos
exponen la eficacia del control difuso.
Se obtuvo en la práctica que a medida que se emplea mayor número de
funciones de membrecía el controlador difuso de hace más selecto.

86
8.1.7 BIibliografia
Tigreros Ortega, Juan Pablo, Bedoya Giraldo, Alfonso (2009). IMPLEMENTACION
DE LOS LABORATORIOS DE CONTROL DIGITAL PARA LA UNIVERSIDAD DE
SAN BUENAVENTURA – CALI. TESIS DE GRADO
Bravo Caicedo, E. F., Lopez Sotelo, J. A., & Otros. (2007). CONTROL Y
MODELADO CON SISTEMAS DIFUSOS. En CONTROL INTELIGENTE (pág. 49).
CALI (Valle): Universidad del Valle.

87
8.1 GUIA DE LABORATORIO No 2
UNIVERSIDAD DE SAN BUENAVENTURA - CALI
Programa de Ingeniería Electrónica
LABORATORIO DE CONTROL DIGITAL
PRÁCTICA 2: CONTROL DE VELOCIDAD DE UN MOTOR DC USANDO LOGICA
DIFUSA Y SIMULADO EN LA PLATAFORMA DE LaBVIEW
8.2.1 Objetivos
Identificar los elementos y señales que conforman los sistemas de control
de velocidad.
Analizar el funcionamiento simulado del control lógico difuso en lazo
cerrado.
Comprender el funcionamiento del circuito de control de velocidad de un
motor DC.
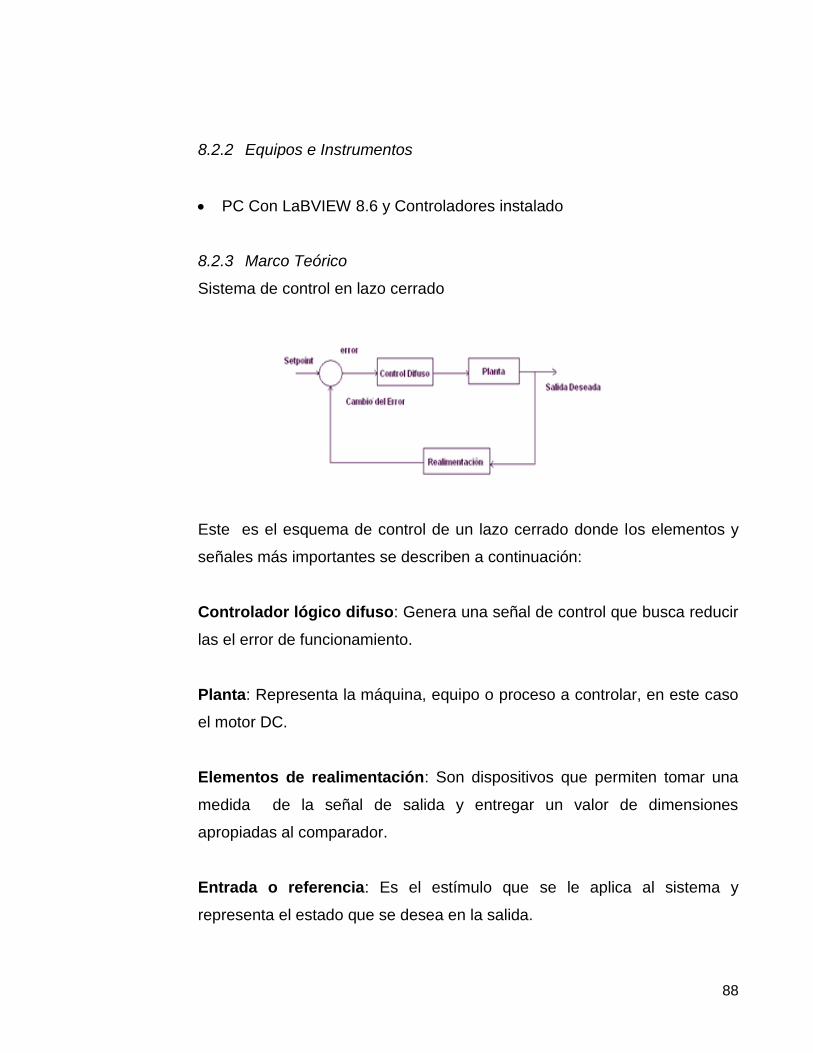
88
8.2.2 Equipos e Instrumentos
PC Con LaBVIEW 8.6 y Controladores instalado
8.2.3 Marco Teórico
Sistema de control en lazo cerrado
Este es el esquema de control de un lazo cerrado donde los elementos y
señales más importantes se describen a continuación:
Controlador lógico difuso: Genera una señal de control que busca reducir
las el error de funcionamiento.
Planta: Representa la máquina, equipo o proceso a controlar, en este caso
el motor DC.
Elementos de realimentación: Son dispositivos que permiten tomar una
medida de la señal de salida y entregar un valor de dimensiones
apropiadas al comparador.
Entrada o referencia: Es el estímulo que se le aplica al sistema y
representa el estado que se desea en la salida.

89
Error: Representa la diferencia existente entre la referencia y la salida, o de
manera más general entre la entrada y la señal proveniente de los
elementos primarios de medición o de realimentación.
Señal de control: Es la señal de salida del controlador.
Variable manipulada: Es la cantidad o condición que se modifica para
afectar el valor de la salida controlada.
Salida o variable controlada: Es la cantidad o condición que se mide y
controla. Representa el resultado del sistema.
8.2.4 Procedimiento
Para la simulación del control de velocidad de un motor DC tenemos
el siguiente programa básico el cual vamos a evaluar y a mejorar
dependiendo de su criterio.

90
En el diagrama de bloques se encuentra las herramientas de control difuso, para
este laboratorio se van controlar manualmente las dos variables de entrada que
son el error y el cambio del error para obtener la salida deseada.
Simular el programa anterior, variar los valores de entrada y completar la siguiente
tabla:
e ∆e -5 -3 -1 0 1 3 5
-1
-0.75
-0.5
-0.25
0
0.25
0.75
1

91
Que mejoras le puedes realizar al programa anteriormente visto, adiciónalas y
pruébalas para revisar cual es el cambio en la respuesta de la salida del
controlador.
8.2.5 Preguntas teóricas
Que otras teorías existen para realizar el diseño de un control difuso. Explique
brevemente dos de ellas.
En que situaciones se puede usar la lógica difusa?
Describa alguna aplicación de la lógica difusa en la actualidad.
Describa brevemente la interfaz de usuario realizada para la práctica.
Observar el desempeño del controlador difuso para diferentes valores de
error y ∆e dentro del rango indicado en las especificaciones técnicas
8.2.6 Informe
Un trabajo escrito previo a la práctica con los siguientes elementos:
Portada de presentación.
Tema y objetivos de la práctica.
Listado de equipos, materiales y dispositivos a utilizar.
Procedimiento detallado de la práctica a desarrollar.
Cálculos previos descritos en el procedimiento.
Simulación de la práctica a través del software requerido.
Solución teórica de las preguntas hechas en la guía de laboratorio.
Espacio para conclusiones y/o observaciones.

92
Consigne de manera clara los resultados obtenidos en el procedimiento, y
responda las preguntas planteadas.

93
INFORME PRACTICA No 2: CONTROL DE VELOCIDAD DE UN MOTOR DC
USANDO LOGICA DIFUSA Y SIMULADO EN LA PLATAFORMA DE LaBVIEW
JENNIFER AGREDO FAJARDO
UNIVERSIDAD DE SAN BUENAVENTURA CALI
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA
LABORATORIO DE ELECTRÓNICA APLICADA – LEA
SANTIAGO DE CALI
2011
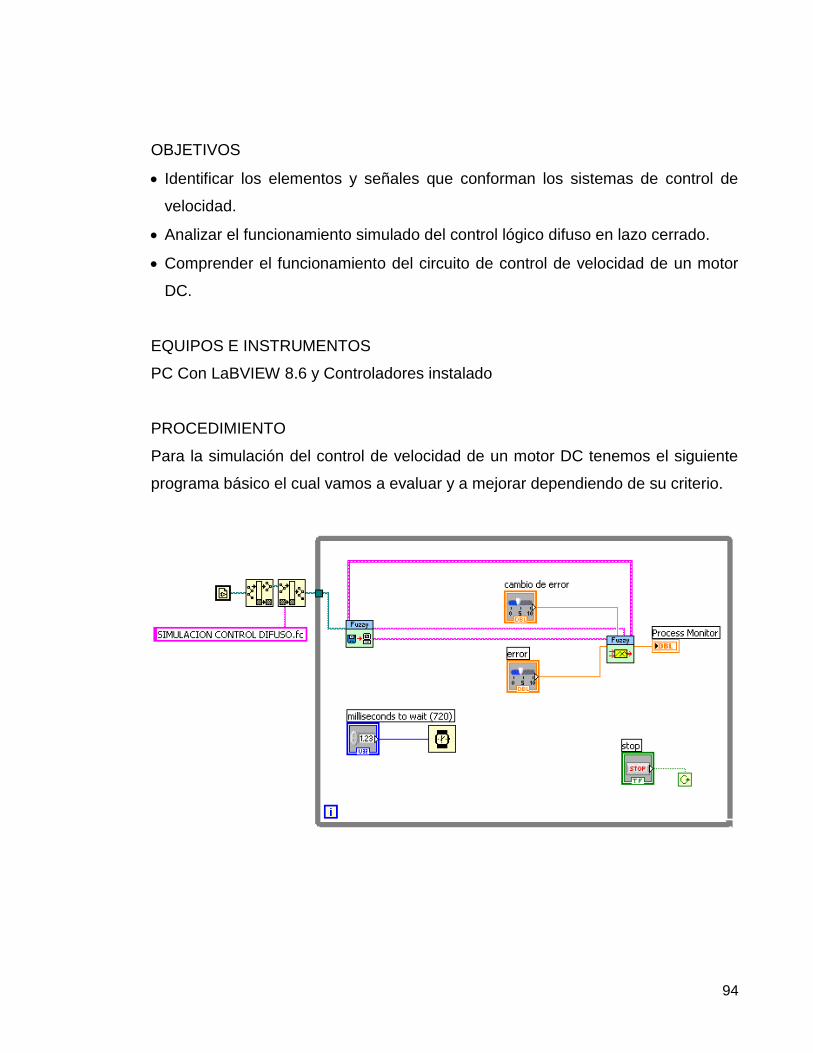
94
OBJETIVOS
Identificar los elementos y señales que conforman los sistemas de control de
velocidad.
Analizar el funcionamiento simulado del control lógico difuso en lazo cerrado.
Comprender el funcionamiento del circuito de control de velocidad de un motor
DC.
EQUIPOS E INSTRUMENTOS
PC Con LaBVIEW 8.6 y Controladores instalado
PROCEDIMIENTO
Para la simulación del control de velocidad de un motor DC tenemos el siguiente
programa básico el cual vamos a evaluar y a mejorar dependiendo de su criterio.
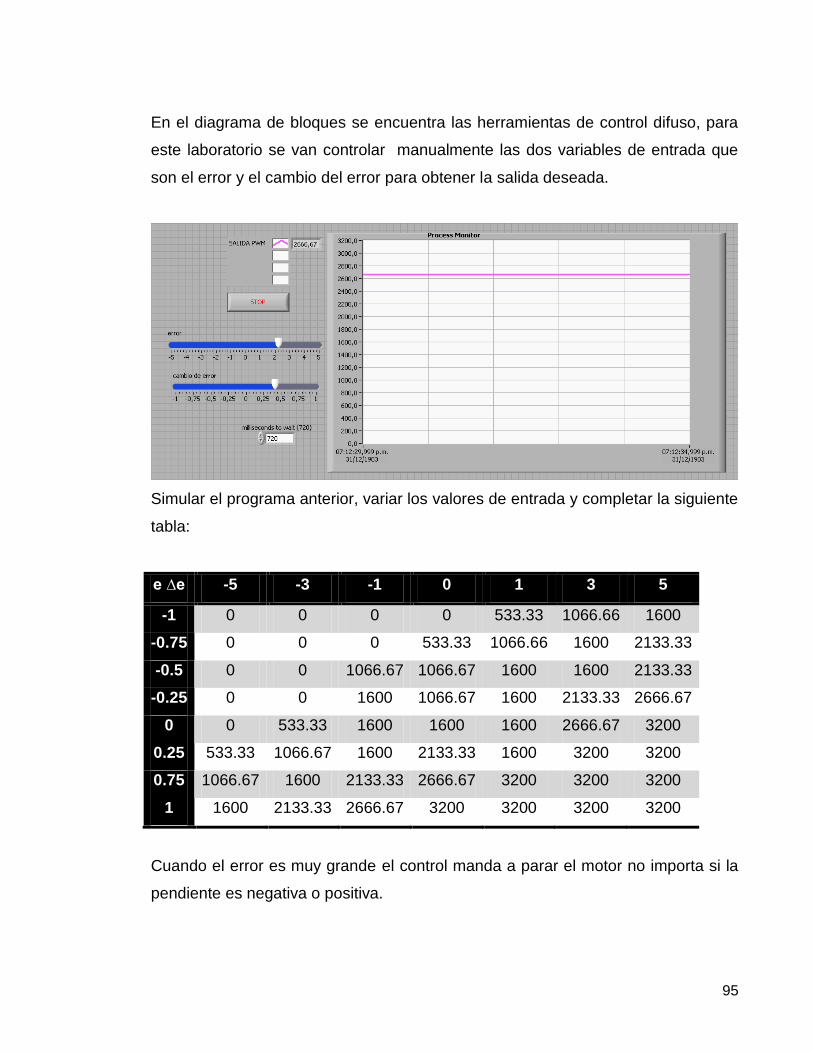
95
En el diagrama de bloques se encuentra las herramientas de control difuso, para
este laboratorio se van controlar manualmente las dos variables de entrada que
son el error y el cambio del error para obtener la salida deseada.
Simular el programa anterior, variar los valores de entrada y completar la siguiente
tabla:
e ∆e -5 -3 -1 0 1 3 5
-1 0 0 0 0 533.33 1066.66 1600
-0.75 0 0 0 533.33 1066.66 1600 2133.33
-0.5 0 0 1066.67 1066.67 1600 1600 2133.33
-0.25 0 0 1600 1066.67 1600 2133.33 2666.67
0 0 533.33 1600 1600 1600 2666.67 3200
0.25 533.33 1066.67 1600 2133.33 1600 3200 3200
0.75 1066.67 1600 2133.33 2666.67 3200 3200 3200
1 1600 2133.33 2666.67 3200 3200 3200 3200
Cuando el error es muy grande el control manda a parar el motor no importa si la
pendiente es negativa o positiva.
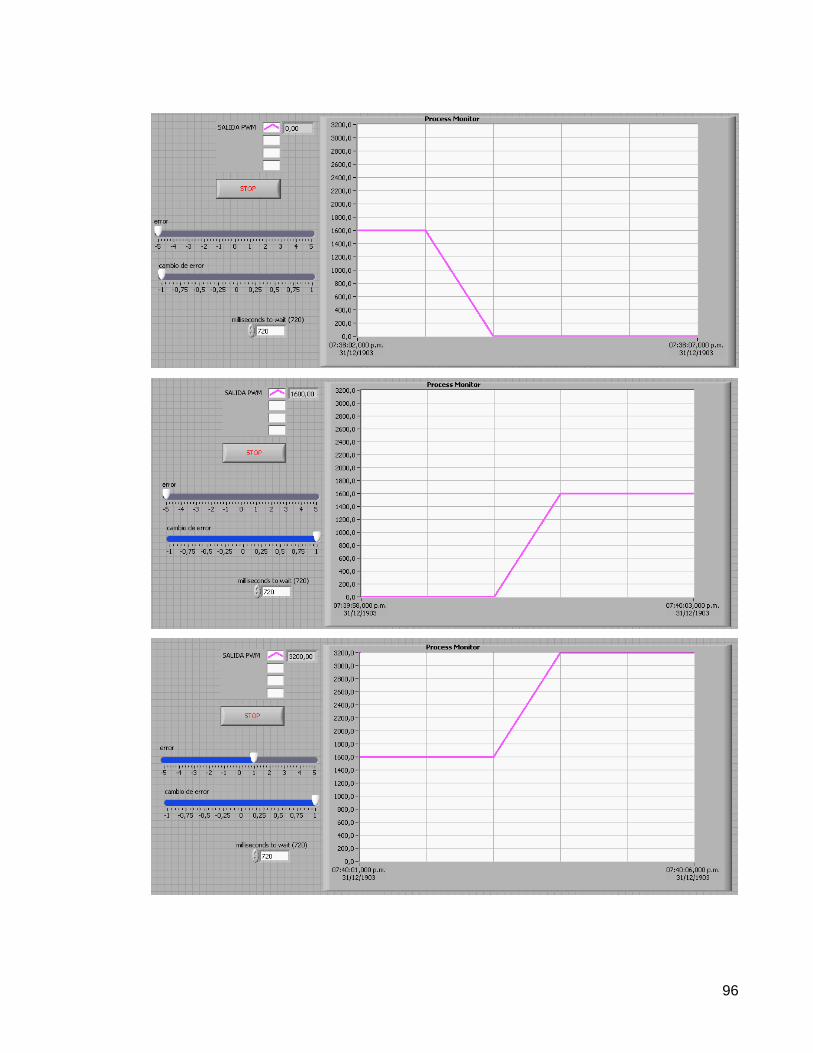
96

97
Respuesta a las Preguntas teóricas
Que otras teorías existen para realizar el diseño de un control difuso. Explique
brevemente dos de ellas.
R./ El concepto de un lógica difusa fue introducido por L.A. Zadeh en 1965 como
una generalización de un lógica tradicional. Los lógica clásica usa la lógica
Booleana con valores exactos como por ejemplo la lógica binaria que usa valores
de 1 o 0 para sus operaciones.
La lógica difusa surge como una necesidad de mejoramiento de la lógica clásica,
ya que esta establece que cualquier enunciado o proposición puede tomar un
valor lógico (verdadero o falso, alto o bajo, prendido o apagado, cerrado o abierto,
en definitiva 1 ó 0, por ejemplo para el caso de una puerta sólo se tienen dos
posibilidades; que es estar abierta o cerrada. En la óptica de la lógica difusa,
dicha puerta no tiene porqué estar necesariamente abierta (valor 1) ni cerrada
(valor 0), sino que además puede estar abierta a medias (valor 0.5), bastante
abierta (valor 0.8), casi cerrada (valor 0.1), etc. como un intento de formalización
del razonamiento con incertidumbre. En particular y al contrario que otras formas
de razonamiento intenta abordar problemas definidos en términos lingüísticos y
por lo tanto imprecisos, donde todos los datos están expresados en términos
cualitativos.
El modelo Mamdani:
Ebrahim Mamdani, uso los principios de la lógica difusa para aplicarlo a una
máquina de vapor la cual no podía tener bajo control con las técnicas
convencionales hasta esa época, este algoritmo de control consiste de 3 pasos:
Generación de Valores Difusos, Evaluación de Reglas y Generación de valores
reales.

98
Fue uno de los primeros métodos de control difuso obtenidos basados en la
experiencia de operadores humanos
If x is A1 and y is B1 then z is C1
El modelo Sugeno:
A mediados de la década, en 1985 Tomohiro Takagi y Michio Sugeno proponen un
nuevo modelo de control Difuso que se emplea en un proceso de limpiado de agua
y en un convertidor que se utiliza en el proceso de hacer acero.
Otro modelo desarrollado para la inferencia difusa, utiliza una función como
consecuente:
If x is A and y is B then z = f(x, y)
En ese mismo año se inventó el primer circuito integrado Difuso por dos
japoneses, Masaki Togai y Hiroyuki Watanabe que provocó el interés de las
empresas en estos circuitos para implementarlos en sus sistemas, este hecho
llevó a Japón a ser el principal exportador de aparatos de la industria con
aplicación directa con y hacia para la lógica Difusa.
Modelo Tsukamoto:
En este modelo la función consecuente es un set difuso con una función
monotonica:
If x is A and y is B then z is C
En que situaciones se puede usar la lógica difusa?
R./ El diseño de un control mediante la implementación de lógica difusa se puede
aplicar en procesos demasiado complejos, cuando no existe un modelamiento
matemático preciso o una solución simple a dicho proceso. También es útil usarlo
con ciertas partes del sistema donde no se conoce suficientemente la información

99
y no pueden medirse de forma confiable que implique que al ajustar esos
parámetros desajuste otros.
Además es poco recomendable usar la lógica difusa cuando ya existe un modelo
matemático que soluciona el problema eficientemente sin recurrir a nuevos
diseños de control.
Describa algunas aplicaciones de la lógica difusa en la actualidad.
R./ En la actualidad el sistema de lógica difusa lo podemos encontrar en muchos
de los elementos que usamos hasta en nuestros hogares mejorando la comodidad
del humano para desarrollar labores muchas veces básicas y simples como:
En el hogar:
Sistemas de foco automático en cámaras fotográfica
Lavadoras automáticas
Aire acondicionado
Hornos microondas
También a un nivel mucho más avanzado e importante para el desarrollo de la
sociedad en cuanto a industria:
Reconocimiento de patrones:
Reconocimiento de voz
Reconocimiento de escritura
Visión por computadora
Reconocimiento óptico de caracteres
Mejora en la eficiencia del uso de combustible en motores
Aplicaciones industriales:
Navegación automática de robots (robot autónomo móvil)
Operación de plantas de cemento
Control de hornos de vidrio

100
Control de reactores nucleares
Medicina:
Rayos x
Herramientas de endoscopia
Control de presión sanguínea
8.2.7 Conclusiones
Actualmente el sistema de lógica difusa esta en casi todos los elementos
que empleamos ayudándonos a mejorar la calidad de vida porque se usan
para desarrollar desde trabajos simples hasta muy complejos en la
Industria, medicina etc.
8.2.8 Bibliografía
Tigreros Ortega, Juan Pablo, Bedoya Giraldo, Alfonso (2009). IMPLEMENTACION
DE LOS LABORATORIOS DE CONTROL DIGITAL PARA LA UNIVERSIDAD DE
SAN BUENAVENTURA – CALI. TESIS DE GRADO
Bravo Caicedo, E. F., Lopez Sotelo, J. A., & Otros. (2007). CONTROL Y
MODELADO CON SISTEMAS DIFUSOS. En CONTROL INTELIGENTE (pág. 49).
CALI (Valle): Universidad del Valle.

101
8.3 GUIA DE LABORATORIO No 3
UNIVERSIDAD DE SAN BUENAVENTURA - CALI
Programa de Ingeniería Electrónica
LABORATORIO DE CONTROL DIGITAL
PRÁCTICA 3: CONTROL DE VELOCIDAD DE UN MOTOR DC USANDO
LOGICA DIFUSA IMPLEMENTADO EN LA PLATAFORMA DE LaBVIEW
8.3.1 Objetivos
Identificar los elementos y señales que conforman los sistemas de control de
velocidad.
Analizar experimentalmente el funcionamiento de un motor de DC y en lazo
cerrado.
Comprender el funcionamiento del circuito de control.
8.3.2 Equipos e Instrumentos
Para la realización de esta práctica se podrán utilizar los siguientes elementos:
Fuente de voltaje dual

102
Cables para conexión de la fuente y el motor
Motor de DC y taco generador incorporado
PC Con LaBVIEW 8.6 y Controladores instalado
Tarjeta de Adquisición CB - 68LP
Circuito de potencia y adecuador de señal
8.3.3 Marco Teórico
Sistema de control en lazo cerrado
En esta figura se presenta el esquema de control de un lazo cerrado. Los
elementos y señales más importantes se describen a continuación:
8.3.4 Procedimiento
Interconecte todos los equipos como son: el motor, el adecuador, la fuente, la
tarjeta de adquisición de datos y el PC.
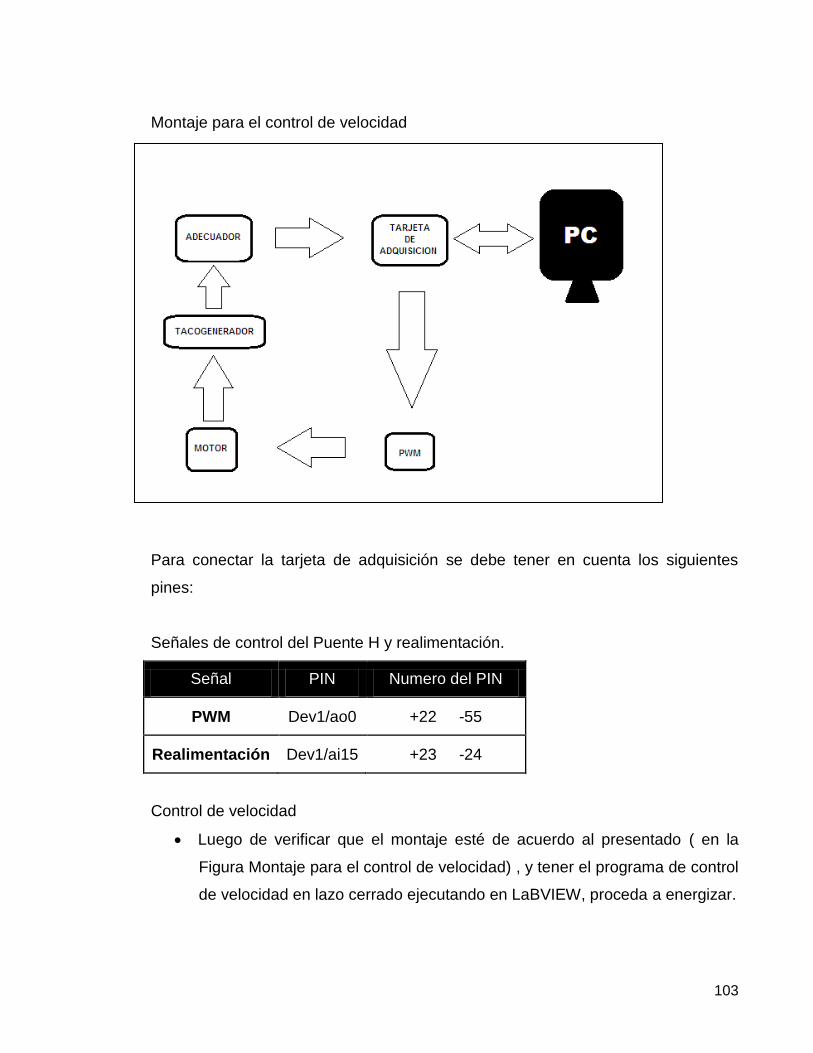
103
Montaje para el control de velocidad
Para conectar la tarjeta de adquisición se debe tener en cuenta los siguientes
pines:
Señales de control del Puente H y realimentación.
Señal PIN Numero del PIN
PWM Dev1/ao0 +22 -55
Realimentación Dev1/ai15 +23 -24
Control de velocidad
Luego de verificar que el montaje esté de acuerdo al presentado ( en la
Figura Montaje para el control de velocidad) , y tener el programa de control
de velocidad en lazo cerrado ejecutando en LaBVIEW, proceda a energizar.
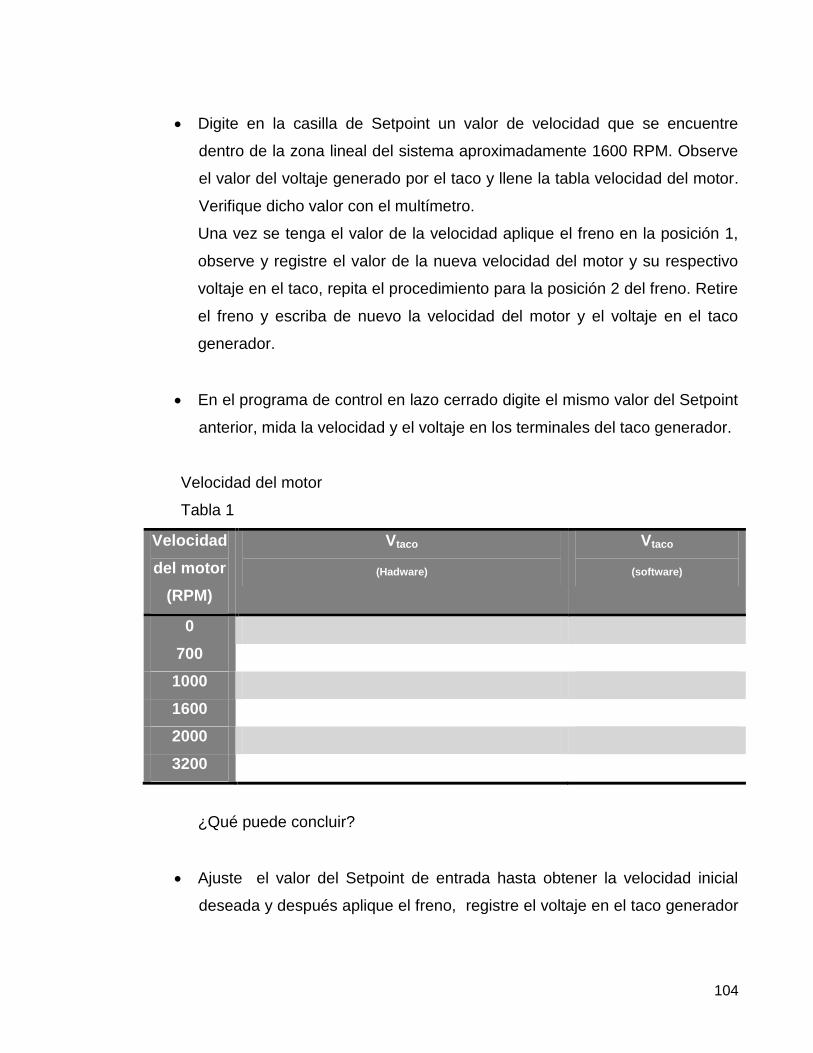
104
Digite en la casilla de Setpoint un valor de velocidad que se encuentre
dentro de la zona lineal del sistema aproximadamente 1600 RPM. Observe
el valor del voltaje generado por el taco y llene la tabla velocidad del motor.
Verifique dicho valor con el multímetro.
Una vez se tenga el valor de la velocidad aplique el freno en la posición 1,
observe y registre el valor de la nueva velocidad del motor y su respectivo
voltaje en el taco, repita el procedimiento para la posición 2 del freno. Retire
el freno y escriba de nuevo la velocidad del motor y el voltaje en el taco
generador.
En el programa de control en lazo cerrado digite el mismo valor del Setpoint
anterior, mida la velocidad y el voltaje en los terminales del taco generador.
Velocidad del motor
Tabla 1
Velocidad
del motor
(RPM)
Vtaco
(Hadware)
Vtaco
(software)
0
700
1000
1600
2000
3200
¿Qué puede concluir?
Ajuste el valor del Setpoint de entrada hasta obtener la velocidad inicial
deseada y después aplique el freno, registre el voltaje en el taco generador

105
y la velocidad actual en la Tabla red cerrada. Posteriormente retire el freno
y obtenga de nuevo el voltaje y la velocidad. Compare los resultados
obtenidos con los que se encontraron para red abierta. Explique a que se
deben las diferencias.
Tabla 2 Lazo cerrado
SP = 3200 rpm EN VACIO
CON
FRENO
CON FRENO
ESTABILIZADO
VELOCIDAD DEL
MOTOR rpm
CORRIENTE
VOLTAJE TACO
ERROR
8.3.5 Preguntas teóricas
¿Qué dispositivos se pueden utilizar como elementos de realimentación a la hora
de hacer control de velocidad? ¿Explique de manera corta su funcionamiento?
Investigue el principio de funcionamiento de algunos ACTUADORES, que son los
encargados directos de activar o desactivar una planta.
8.3.6 Preguntas para resolver en el laboratorio
De acuerdo a la bucla típica para los sistemas de control de velocidad,
describa de manera cualitativa el funcionamiento de los elementos más
importantes.

106
En base a sus observaciones explique las ventajas y desventajas de los
sistemas de control en lazo abierto y en lazo cerrado.
8.3.7 Informe
Un trabajo escrito previo a la práctica con los siguientes elementos:
Portada de presentación.
Tema y objetivos de la práctica.
Listado de equipos, materiales y dispositivos a utilizar.
Procedimiento detallado de la práctica a desarrollar.
Cálculos previos descritos en el procedimiento.
Simulación de la práctica a través del software requerido.
Solución teórica de las preguntas hechas en la guía de laboratorio.
Espacio para conclusiones y/o observaciones.
Consigne de manera clara los resultados obtenidos en el procedimiento, y
responda las preguntas planteadas.

107
INFORME PRACTICA No 3: CONTROL DE VELOCIDAD DE UN MOTOR DC
USANDO LOGICA DIFUSA Y SIMULADO EN LA PLATAFORMA DE LaBVIEW
JENNIFER AGREDO FAJARDO
UNIVERSIDAD DE SAN BUENAVENTURA CALI
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA ELECTRÓNICA
LABORATORIO DE ELECTRÓNICA APLICADA – LEA
SANTIAGO DE CALI
2011

108
8.1 OBJETIVOS
Identificar los elementos y señales que conforman los sistemas de control de
velocidad.
Analizar experimentalmente el funcionamiento de un motor de DC y en lazo
cerrado.
Comprender el funcionamiento del circuito de control.
EQUIPOS E INSTRUMENTOS
Para la realización de esta práctica se podrán utilizar los siguientes elementos:
Fuente de voltaje dual
Cables para conexión de la fuente y el motor
Motor de DC y taco generador incorporado
PC Con LaBVIEW 8.6 y Controladores instalado
Tarjeta de Adquisición CB - 68LP
Circuito de potencia y adecuador de señal
MARCO TEÓRICO
Sistema de control en lazo cerrado

109
En este grafico de Sistema de control en lazo cerrado se presenta el esquema de
control de un lazo cerrado. Los elementos y señales más importantes se describen
a continuación:
PROCEDIMIENTO
Interconecte todos los equipos como son: el motor, el adecuador, la fuente, la
tarjeta de adquisición de datos y el PC.
Montaje para el control de velocidad

110
Para conectar la tarjeta de adquisición se debe tener en cuenta los siguientes
pines:
Señales de control del Puente H y realimentación.
Señal PIN Numero del PIN
PWM Dev1/ao0 +22 -55
Realimentación Dev1/ai15 +23 -24
Montaje tarjeta de Adquisición de datos

111
Conexión motor DC
Control de velocidad
Luego de verificar que el montaje esté de acuerdo al presentado en la Figura de
Montaje para el control de velocidad, y tener el programa de control de velocidad
en lazo cerrado ejecutando en LaBVIEW, proceda a energizar con 24 Vdc.
Digite en la casilla de Setpoint un valor de velocidad que se encuentre dentro de la
zona lineal del sistema aproximadamente 1600 RPM. Observe el valor del voltaje
generado por el taco y llene la tabla1. Verifique dicho valor con el multímetro.
Una vez se tenga el valor de la velocidad aplique el freno en la posición 1, observe
y registre el valor de la nueva velocidad del motor y su respectivo voltaje en el
taco, repita el procedimiento para la posición 2 del freno. Retire el freno y escriba
de nuevo la velocidad del motor y el voltaje en el taco generador.

112
En el programa de control en lazo cerrado digite el mismo valor del Setpoint
anterior, mida la velocidad y el voltaje en los terminales del taco generador.
Tabla 1
Velocidad
del motor
(RPM)
Vtaco
(Hadware)
Vtaco
(software)
0 0 0.2
700 2.36 2.1
1000 3.46 3.40
1600 5.52 5.58
2000 5.56 5.50
3200 10.99 10.96
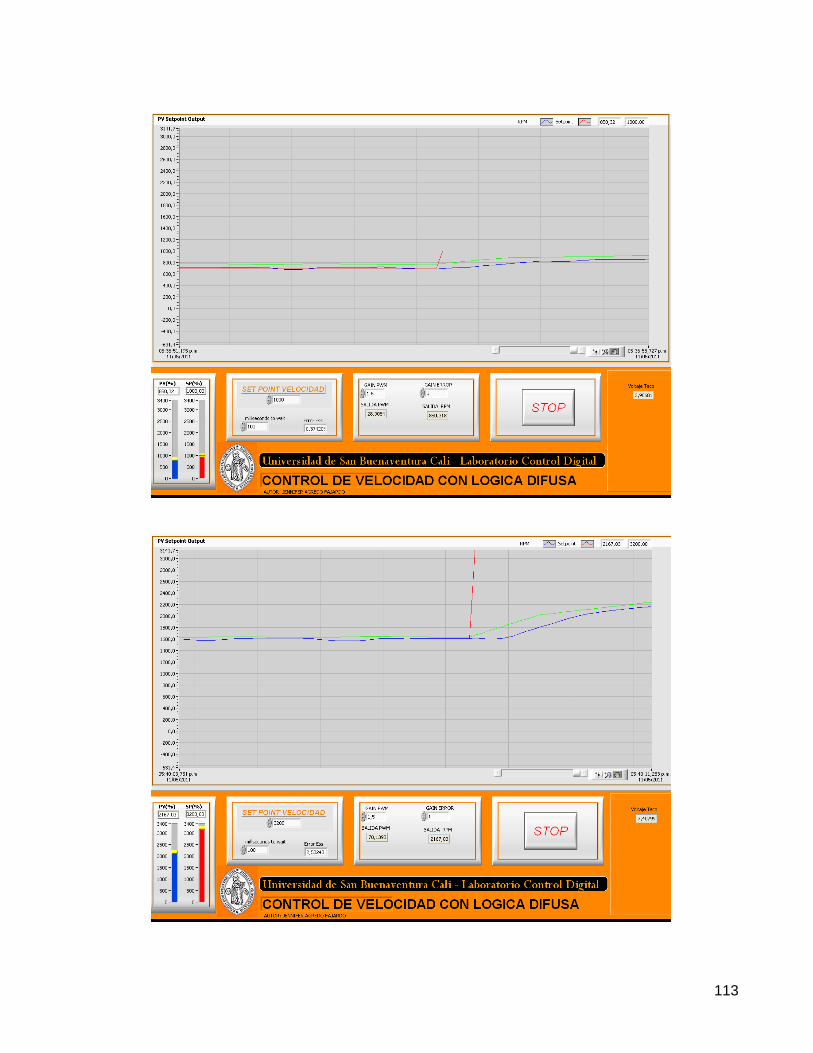
113

114
¿Qué puede concluir?
Al realizar esta práctica se puede concluir que la adquisición de datos está bien
realizada, así como el adecuador de señal, ya que el voltaje de la realimentación
es transformado por medio de un adecuador de un rango de 0 – 12 Vdc, a un
rango de 0 – 5 Vdc ya que la tarjeta de adquisición de datos no soporta mas
voltaje.
Ajuste el valor del Setpoint de entrada hasta obtener la velocidad inicial deseada y
después aplique el freno, registre el voltaje en el taco generador y la velocidad
actual en la Tabla 2. Posteriormente retire el freno y obtenga de nuevo el voltaje y
la velocidad. Explique a que se deben las diferencias.

115
Tabla de LAZO CERRADO
SP = 3200 rpm EN VACIO CON
FRENO
CON FRENO
ESTABILIZADO
VELOCIDAD DEL
MOTOR rpm 3178 2500 3213
CORRIENTE 0.26 1.52 2.09
VOLTAJE TACO 10.96 11.05 11.35
ERROR 0.03 2.03 0.08
El motor en el vacio actúa de manera natural, siguiendo el setpoint y la acción de
control que se ejerce sobre el, la velocidad del motor llega hasta se setpoint
deseado con un rgen de error muy pequeño, en este caso es del 0.03; la corriente
que tiene que entregar la fuente es relativamente baja y el voltaje del taco no
alcanza a llegar a los 12 V en el rango que estaba diseñado.
Al aplicarle el freno tenemos que la velocidad disminuye considerablemente el
error aumenta, la corriente que tiene que suministrar la fuente para poder
establecer la velocidad de referencia es mucho más que el doble.
El motor trata de pedir más corriente a la fuente para poder llegar a la referencia
deseada, implicando que exista un mayor esfuerzo de trabajo del motor y del
control.
Respuesta a las Preguntas teóricas
¿Qué dispositivos se pueden utilizar como elementos de realimentación a la hora
de hacer control de velocidad? ¿Explique de manera corta su funcionamiento?
116
R./ En los procesos se tiene que tener elementos que nos realimenten nuestro
control que nos den la referencia que necesitamos para compararla con el setpoint
y calcular el error para que se tenga un mejor trabajo de la planta
Existen muchos elementos importantes, aquí enumeramos algunos:
Sensor: es normalmente el elemento que se encuentra en contacto directo con la
magnitud que se va a evaluar en el proceso. El sensor recibe la magnitud física y
se la proporciona al transmisor.
Transmisor: se piensa que el transmisor es el equipo que transforma la señal que
sale del sensor y la convierte en una señal normalizada o en valores visibles como
en unidades de volumen, presión, temperatura, etc que conozcamos.
Tacogenerador: es un servosistema en el que la salida es una posición, velocidad
o aceleración por medio de un voltaje.
Servomotor: motor con control de posición en lazo cerrado
Respuesta a las Preguntas para resolver en el laboratorio
a. De acuerdo a la bucla típica para los sistemas de control de
velocidad, describa de manera cualitativa el funcionamiento de los
elementos más importantes.
R./ Descripción de la bucla diseñada para el control de velocidad de un motor DC.

117
Comparador: Es el encargado de producir la señal de error.
Conversor A/D y D/A: el análogo digital recibe la señal de la planta, la convierte
en digital para poder ser procesada por el computador y el digital análogo
convierte la señal digital ya procesada en análoga para actuar en la planta.
Controlador lógico difuso: Genera una señal de control que busca reducir las el
error de funcionamiento.
Actuador: Adecúa los niveles de potencia entre la señal de control y la variable
manipulada.
Planta: Representa la máquina, equipo o proceso a controlar, en este caso el
motor DC.
Elementos de realimentación: Son dispositivos que permiten tomar una medida
de la señal de salida y entregar un valor de dimensiones apropiadas al
comparador.
Entrada o referencia: Es el estímulo que se le aplica al sistema y representa el
estado que se desea en la salida.

118
Error: Representa la diferencia existente entre la referencia y la salida, o de
manera más general entre la entrada y la señal proveniente de los elementos
primarios de medición o de realimentación.
Señal de control: Es la señal de salida del controlador.
Variable manipulada: Es la cantidad o condición que se modifica para afectar el
valor de la salida controlada.
Salida o variable controlada: Es la cantidad o condición que se mide y controla.
Representa el resultado del sistema.
8.3.8 Conclusiones
La implementación de un controlador de velocidad con lógica difusa en la
plataforma LaBVIEW, cumple la particularidad de coordinación y flexibilidad
necesaria para el uso de estudiantes en el desarrollo de diferentes prácticas
de laboratorio orientadas al control de procesos.
Se logró diseñar e implementar este sistema de entrenamiento para observar
otras alternativas de control.
Se logra ver que las características de exactitud, precisión y robustez que
brinda este sistema permite obtener un valor confiable de la variable de
proceso para el desarrollo de contralores utilizando varios métodos de control.
De los efectos derivados de las prácticas ejecutadas con lógica difusa, se
puede ver que el control difuso da una respuesta realizable, rápida y sólida
para el sistema, cuando éste es sometido a diferentes perturbaciones. Los
resultados obtenidos muestran la fuerza y potencia del método de control
propuesto en este trabajo.

119
8.3.9 Bibliografía
Tigreros Ortega, Juan Pablo, Bedoya Giraldo, Alfonso (2009). IMPLEMENTACION
DE LOS LABORATORIOS DE CONTROL DIGITAL PARA LA UNIVERSIDAD DE
SAN BUENAVENTURA – CALI. TESIS DE GRADO
Bravo Caicedo, E. F., Lopez Sotelo, J. A., & Otros. (2007). CONTROL Y
MODELADO CON SISTEMAS DIFUSOS. En CONTROL INTELIGENTE (pág. 49).
CALI (Valle): Universidad del Vall.e
Hilera, J. R., & Martínez, V. J. (1995). REDES NEURONALES ARTIFICIALES.
Madrid, España: ADDISON -WESLEY IBEROAMERICA.
Chapman, S. J. (1993, 1987). MAQUINAS ELECTRICAS. Santa Fé de Bogotá:
MC GRAW HILL.
National Instruments Corporation. (2009). LABVIEW. Recuperado el Septiembre
de 2009, de http://www.ni.com/LaBVIEW/whatis/esa/
Herrera Espinosa Javier. “Implementación en un DSP de un regulador de
velocidad difuso tipo Takagi-Sugeno para un arreglo de motor de corriente directa
120
9. CONCLUSIONES
El estudio histórico de la lógica difusa y su aplicación en control de motores,
permitió construir una visión y una prospectiva importante de esta aplicación en
procesos industriales que demanden sistemas de control ajustados a
dinámicas descritas por operarios expertos.
Este documento presenta información importante que contribuye a consolidar
bases teóricas fundamentales en el momento en que se quiera efectuar un
control de velocidad con lógica difusa para un motor DC, proporcionando al
lector un procedimiento organizado, coherente y pertinente con el proceso en
cuestión.
Se encontró que los requerimientos computacionales del controlador diseñado
son mínimos, de esta forma es posible pensar en la sustitución de algunos
existentes que no cumplan cabalmente su función por otros, desarrollados con
control inteligente debido a que las características más atractivas de la lógica
difusa son: su flexibilidad, su tolerancia con la imprecisión, su capacidad para
moldear problemas no lineales y su base en el lenguaje natural.
La implementación de un controlador de velocidad con lógica difusa en la
plataforma LaBVIEW, cumple la particularidad de coordinación y flexibilidad
necesaria para el uso de estudiantes en el desarrollo de diferentes prácticas
de laboratorio orientadas al control de procesos.
Se logró diseñar e implementar este sistema de control para facilitar el estudio
y entrenamiento de los estudiantes con el propósito de propender por la
aplicación de otras alternativas de control, igual o más eficientes
.

121
De los efectos derivados de las prácticas ejecutadas con lógica difusa, se
puede ver que el control difuso da una respuesta realizable, rápida y sólida
para el sistema, cuando éste es sometido a diferentes perturbaciones. Los
resultados obtenidos muestran la fuerza y potencia del método de control
propuesto en este trabajo.
La ejecución y funcionamiento del controlador, admiten acentuar las bondades
que tendría su uso en distintas aplicaciones de control, ya que una vez
entendido el principio de funcionamiento de dicho controlador, se ve
visiblemente mostrada la facilidad que se tiene en diseñarlo, implementarlo y
valorarlo.
No se halla un método que indique la cantidad exacta funciones de pertenencia
que deben tener las etapas de fuzzificación, de la experiencia obtenida, se
puede decir que mientras más funciones se desarrollen, más preciso será el
controlador, teniendo siempre la cautela de no colmarlo de funciones de
pertenencia, ya que en lugar de obtener una respuesta más fina, se obtiene un
controlador más pausado y menos confiable, debido a que la cantidad de
términos lingüísticos lo mantendría activo permanentemente.
En el controlador se nota que la salida no exterioriza amplias oscilaciones
alrededor del punto de operación, permite que la planta alcance el set point
mediante aumentos o disminuciones sin saltos bruscos que son perceptibles
en el control convencional tipo PID.
Es primordial recalcar las grandes ventajas y facilidades que representa
trabajar con el software LABVIEW debido a que accede al diseño fácilmente y
permite editar las funciones de membrecía para cada variable lingüística, así
mismo, se puede acceder directamente la base de reglas.
El prototipo fabricado para la adecuación de la señal desde el tacogenerador
hacia la tarjeta de adquisición de datos y el puente H, nos sirvió como unión del
hardware y el software para la interacción mutua.

122
RECOMENDACIONES
Para la ejecución de este controlador, es elemental conocer el trabajo básico
del sistema de entrenamiento, ya que reglas con conocimiento escaso, pobre
o impreciso del sistema resulta en soluciones equivocadas e imprecisas.
La implementación de este tipo de controladores, deberá tener cierto tipo de
conocimiento básico ya que si no se tiene le será mucho más difícil
implementar uno de este tipo.
Se requiere que el estudiante que implemente este tipo de control con la
herramienta de Labview debe tener un conocimiento básico del mismo, pues la
utilización del software es exigente en la aplicación de cada una de sus
funciones básicas.

123
10.BIBLIOGRAFIA
[1] 1957 Lofti Zadeh (Catedrático e investigador de la universidad de California-
Berkeley)
[2] Herrera Espinosa Javier “Implementación en un DSP de un regulador de
velocidad difuso tipo Takagi-Sugeno para un arreglo de motor de corriente directa
alternador” Tesis para obtener el grado de Maestro en Ciencias. México D.F. 2003
SEPI.
[3]Cortes Mateos Raúl, “Control de excitación Difuso de un generador síncrono”
SEPI-ESIME ZACATENCO. Tesis para obtener el grado de Doctor en Ciencias en
1997.
[4]H. M. Gerardo Celso, “Control Difuso de velocidad de un motor de corriente
directa”. SEPI-ESIME ZACATENCO. Tesis para obtener el grado de Maestro en
Ciencias, enero de 1997.
[5]Díaz García Luis M. “Desarrollo de una tarjeta para el control difuso de
velocidad de un motor de c.c. basado en un paquete fudge” SEPI-ESIME
ZACATENCO. Tesis para obtener el grado de maestro en Ciencias en 1999.
[6] Herrera Espinosa Javier y Ramírez Trujillo Jorge “Implementación de un
Control Difuso de Velocidad a un Motor DC. microcontrolador 68HC11” 4ª semana
de Control y Automatización. 2000

124
[7] Altamirano González Manlio Al “Control Difuso de Velocidad Tipo Mamdani de
un Motor DC Autosintonizable por Algoritmos Genéticos”. Tesis para Obtener el
grado de Maestría. México DF. Agosto 2002
[8]López Calderón Ana Belén. “Implementación de un Controlador Difuso por
medio del MC68H12, para el control de velocidad de una máquina abrasiva seca”.
Tesis para obtener el grado de Licenciatura en Control y Automatización. México
DF. Febrero 2005.
[9]Jaime F. Fonseca, Julio S. Matins y Carlos A. Couto.
[10]Pierre Guillemin en su documento “Fuzzy Logic Applied to motor Control”
[11] articulo Lina María Aguilar Lobo y Luis Javier Martínez Montero en su
documento llamado “Implementación de un controlador difuso de un motor DC
empleando la interfaz microcontrolador-CPLD ”. en este caso el software se
implementa en el microcontrolador 89C52.
[12] Bravo Caicedo, E. F., Lopez Sotelo, J. A., & Otros. (2007). CONTROL Y
MODELADO CON SISTEMAS DIFUSOS. En CONTROL INTELIGENTE (pág. 49).
CALI (Valle): Universidad del Vall.e
[13]Tigreros Ortega, Juan Pablo, Bedoya Giraldo, Alfonso (2009).
IMPLEMENTACION DE LOS LABORATORIOS DE CONTROL DIGITAL PARA LA
UNIVERSIDAD DE SAN BUENAVENTURA – CALI. TESIS DE GRADO

125
Otras Fuentes Bibliográficas
Hilera, J. R., & Martínez, V. J. (1995). REDES NEURONALES ARTIFICIALES.
Madrid, España: ADDISON -WESLEY IBEROAMERICA.
Chapman, S. J. (1993, 1987). MAQUINAS ELECTRICAS. Santa Fé de Bogotá:
MC GRAW HILL.
National Instruments Corporation. (2009). LABVIEW. Recuperado el Septiembre
de 2009, de http://www.ni.com/LaBVIEW/whatis/esa/
Aguilar Lobo, L. M., & Martinez Montero, L. J. “IMPLEMENTACIÓN DE UN
CONTROLADOR DIFUSO DE UN MOTOR DC EMPLEANDO LA INTERFAZ
MICROCONTROLADOR - CPLD”. UNIVERSIDAD FRANCISCO DE PAULA
SANTANDER.
Chapman, S. J. (1993, 1987). MAQUINAS ELECTRICAS. Santa Fé de Bogotá:
MC GRAW HILL.
Diaz, H., borjas, R., & Sagardia, A. (1997). DISEÑO Y ENSAYO DE UN
CONTROLADOR DIFUSO PARA UN MOTOR DE INDUCCION TRIFASICO. red
AL y C , 8.
F. Velasco Vega, L. J. MODELADO Y SIMULACIÓN DE UN CONTROL DE
VELOCIDAD DE UN MOTOR DE INDUCCIÓN MEDIANTE LÓGICA DIFUSA.
Santander, Cantabria, SPAIN: Departamento de Tecnología Electrónica e
Ingeniería de Sistemas y Automática.

126
IMPLEMENTACION SOBRE FPGAS DE SISTEMAS DIFUSOS
PROGRAMABLES. Centro Nacional de microelectronica.
Lemus, C. E., & Hernandez Reyes, J. SIMULACION DE SISTEMA DIFUSO PARA
EL CONTROL DE VELOCIDAD DE UN NOTOR DC.
M.Sc., I. O. SISTEMAS DE LÓGICA DIFUSA - FUNDAMENTOS.
Sanchez, S. y. IMPLEMENTACION SOBRE FPGAS DE SISTEMAS DIFUSOS
PROGRAMABLES.
STARMEDIA. (2009). Recuperado el Octubre de 2009, de
http://html.rincondelvago.com/motores-universales.html
Tipsuwan, Y., & Chow, M.-Y. (2008). FUZZY LOGIC MICROCONTROLLER
IMPLEMENTATION FOR DC MOTOR SPEED CONTROL. North Carolina State
University, USA: IEEE.
Universidad del Valle, Clases. SISTEMAS NEURODIFUSOS., (pág. 20). Cali.
Herrera Espinosa Javier y Ramírez Trujillo Jorge “Implementación de un Control
Difuso de Velocidad a un Motor de c.d. microcontrolador 68HC11” 4ª semana de
Control y Automatización. 1999.