
IDENTIFICACIÓN Y SEGUIMIENTO DE OBJETOS...
6
253 IDENTIFICACIÓN Y SEGUIMIENTO DE OBJETOS PARA EL CONTROL DE UN ROBOT MÓVIL Moisés García Villanueva 93 , Juan Carlos Silva Chávez 94 , Alberto Torres Ramírez 95 , Leonardo Romero Muñoz 96 El sistema de percepción en un robot, que le permite realizar ciertas mediciones del mundo real, es totalmente dependiente del tipo y cantidad de sensores utilizados, y determina en gran medida las capacidades del robot. Un sensor particularmente importante en los robots es la utilización de una o varias cámaras y las disciplinas de visión computacional y procesamiento de imágenes tienen una relación directa con el aprovechamiento de este sensor. En el presente trabajo se abordan dos problemas importantes en el área de visión computacional: identificación de objetos por el color y seguimiento de objetos. Se describen las técnicas utilizadas para identificar un objeto y guiar a un robot móvil autónomo para que se acerque a dicho objeto. Se presenta además la interfaz de comunicación entre el sistema de visión y el sistema de control de movimientos del robot. Palabras Clave: Percepción visual, identificación de objetos, seguimiento, robot móvil. Introducción De los cinco sentidos que se conocen, el sentido de la visión es considerado el que mayor información proporciona del total que este recibe, la velocidad de transferencia para una visualización continua probablemente excede los 10 megabits por segundo (meg/s). Otra característica de la percepción visual humana es la facilidad con la cual se realiza la interpretación de una escena, es decir, identificar libros sobre un escritorio, los utensilios en la cocina, árboles en el bosque, por mencionar sólo algunos ejemplos. Ninguna deducción obvia es necesaria y ningún sobre esfuerzo es requerido para interpretar cada escena, adicionalmente se debe mencionar que las respuestas son efectivamente inmediatas y están normalmente disponibles en una fracción de una décima de segundo [Davies, E. (2012)]. En la robótica se proyecta la implementación de los sentidos humanos en las máquinas, con la finalidad de proporcionar autonómia y eficacia en el trabajo para el cual se desarrolla un robot. Dentro de la visión computacional se tiene como uno de sus objetivos el proveer el sentido de la vista en la robótica, por lo tanto una gran cantidad de aplicaciones prácticas requieren implementar la búsqueda de varios tipos de objetos 93 Universidad Michoacana de San Nicolás de Hidalgo; [email protected] 94 Universidad Michoacana de San Nicolás de Hidalgo; [email protected] 95 Universidad Michoacana de San Nicolás de Hidalgo; [email protected] 96 Universidad Michoacana de San Nicolás de Hidalgo; [email protected]
Transcript of IDENTIFICACIÓN Y SEGUIMIENTO DE OBJETOS...
253
IDENTIFICACIÓN Y SEGUIMIENTO DE OBJETOS PARA EL CONTROL DE UN ROBOT MÓVIL
Moisés García Villanueva93, Juan Carlos Silva Chávez94, Alberto Torres Ramírez95, Leonardo Romero
Muñoz96
El sistema de percepción en un robot, que le permite realizar ciertas mediciones del mundo real, es totalmente dependiente del tipo y cantidad de sensores utilizados, y determina en gran medida las capacidades del robot. Un sensor particularmente importante en los robots es la utilización de una o varias cámaras y las disciplinas de visión computacional y procesamiento de imágenes tienen una relación directa con el aprovechamiento de este sensor. En el presente trabajo se abordan dos problemas importantes en el área de visión computacional: identificación de objetos por el color y seguimiento de objetos. Se describen las técnicas utilizadas para identificar un objeto y guiar a un robot móvil autónomo para que se acerque a dicho objeto. Se presenta además la interfaz de comunicación entre el sistema de visión y el sistema de control de movimientos del robot.
Palabras Clave: Percepción visual, identificación de objetos, seguimiento, robot móvil.
Introducción De los cinco sentidos que se conocen, el sentido de la visión es considerado el que mayor información proporciona del total que este recibe, la velocidad de transferencia para una visualización continua probablemente excede los 10 megabits por segundo (meg/s). Otra característica de la percepción visual humana es la facilidad con la cual se realiza la interpretación de una escena, es decir, identificar libros sobre un escritorio, los utensilios en la cocina, árboles en el bosque, por mencionar sólo algunos ejemplos. Ninguna deducción obvia es necesaria y ningún sobre esfuerzo es requerido para interpretar cada escena, adicionalmente se debe mencionar que las respuestas son efectivamente inmediatas y están normalmente disponibles en una fracción de una décima de segundo [Davies, E. (2012)].
En la robótica se proyecta la implementación de los sentidos humanos en las máquinas, con la finalidad de proporcionar autonómia y eficacia en el trabajo para el cual se desarrolla un robot. Dentro de la visión computacional se tiene como uno de sus objetivos el proveer el sentido de la vista en la robótica, por lo tanto una gran cantidad de aplicaciones prácticas requieren implementar la búsqueda de varios tipos de objetos
93Universidad Michoacana de San Nicolás de Hidalgo; [email protected]
94 Universidad Michoacana de San Nicolás de Hidalgo; [email protected]
95 Universidad Michoacana de San Nicolás de Hidalgo; [email protected]
96 Universidad Michoacana de San Nicolás de Hidalgo; [email protected]

254
en una imagen o en su lugar la interpretación de una pequeña área en la imagen.
Objetivos Mostrar la implementación de un sistema de visión computacional que identifica un objeto y hace que un robot móvil autónomo se dirija hacia él. Identificar la problemática para el seguimiento de objetos en tiempo real. Conocer la estructura del sistema de control del robot móvil.
Materiales y Métodos: Las características de hardware principales del robot que fue implementado en el desarrollo del presente trabajo son:
1. Raspberry Pi (SBC por sus siglas en inglés de Single Board Computer) , con un procesador a 700 MHz, 512 MB en RAM y con posibilidades de correr el sistema operativo Linux.
2. Cámara de 5Mp con interfaz serial para los puertos de la Raspberry Pi. 3. Tarjeta de desarrollo Arduino Nano, basada en el microcontrolador Atmel
ATmega168 o ATmega328.
La Fig. 1 nos muestra las vistas fotográficas de la implementación física del robot móvil autónomo seguidor de objetos.
Lateral Superior Frontal Trasera Figura 1. Diferentes vistas del robot móvil autónomo seguidor de objetos implementado.
Un sistema de visión computacional está compuesto de tres partes principales: a) la cámara, cuya finalidad es la adquisición de los datos en el entorno; b) la unidad de procesamiento, en la que se manipulan las imágenes o en donde se implementa el cómputo de la información adquirida por la cámara; y c) los algoritmos de visión computacional o software especializado, que permite el rápido desarrollo de aplicaciones o sistemas.
Una forma de detectar objetos de interés es mediante el color, para ello se hace necesario trabajar en un espacio de color que nos permita controlar características de iluminación. Existen varios espacios de colores para la representación de imágenes, algunos de los más comunes son: RGB que representa al rojo, verde, azul, (por sus
255
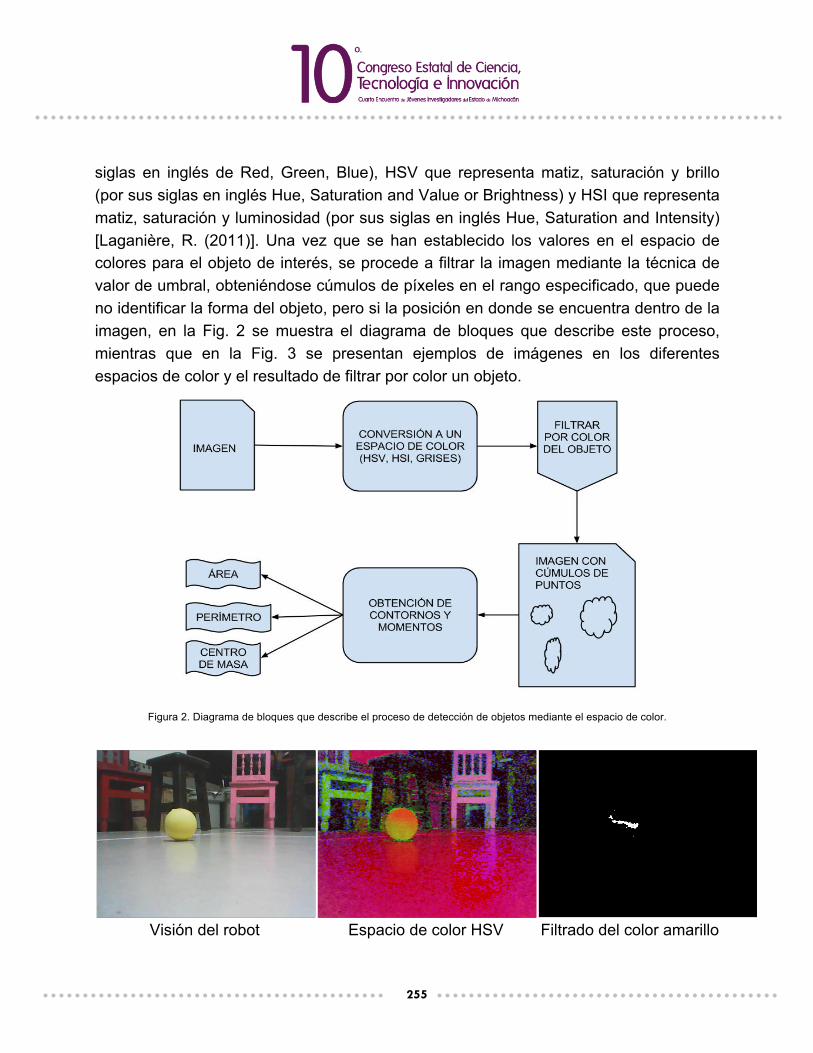
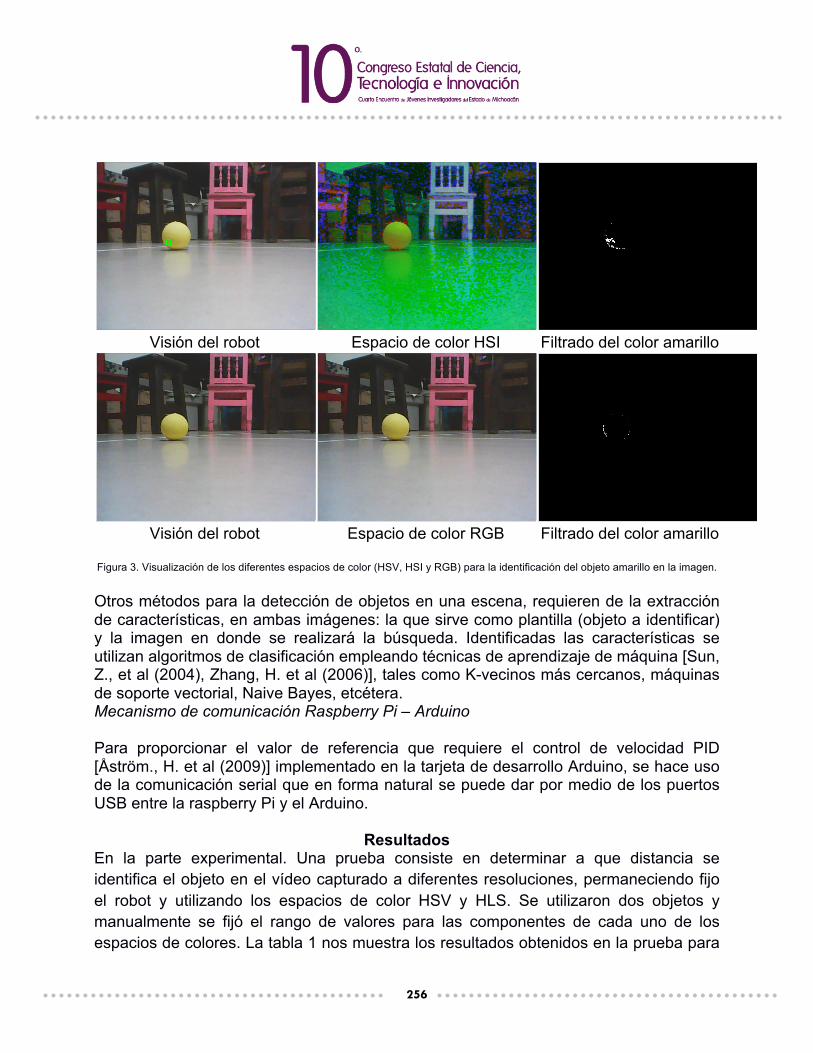
siglas en inglés de Red, Green, Blue), HSV que representa matiz, saturación y brillo (por sus siglas en inglés Hue, Saturation and Value or Brightness) y HSI que representa matiz, saturación y luminosidad (por sus siglas en inglés Hue, Saturation and Intensity) [Laganière, R. (2011)]. Una vez que se han establecido los valores en el espacio de colores para el objeto de interés, se procede a filtrar la imagen mediante la técnica de valor de umbral, obteniéndose cúmulos de píxeles en el rango especificado, que puede no identificar la forma del objeto, pero si la posición en donde se encuentra dentro de la imagen, en la Fig. 2 se muestra el diagrama de bloques que describe este proceso, mientras que en la Fig. 3 se presentan ejemplos de imágenes en los diferentes espacios de color y el resultado de filtrar por color un objeto.
Figura 2. Diagrama de bloques que describe el proceso de detección de objetos mediante el espacio de color.
Visión del robot Espacio de color HSV Filtrado del color amarillo
256
Visión del robot Espacio de color HSI Filtrado del color amarillo
Visión del robot Espacio de color RGB Filtrado del color amarillo
Figura 3. Visualización de los diferentes espacios de color (HSV, HSI y RGB) para la identificación del objeto amarillo en la imagen.
Otros métodos para la detección de objetos en una escena, requieren de la extracción de características, en ambas imágenes: la que sirve como plantilla (objeto a identificar) y la imagen en donde se realizará la búsqueda. Identificadas las características se utilizan algoritmos de clasificación empleando técnicas de aprendizaje de máquina [Sun, Z., et al (2004), Zhang, H. et al (2006)], tales como K-vecinos más cercanos, máquinas de soporte vectorial, Naive Bayes, etcétera. Mecanismo de comunicación Raspberry Pi – Arduino Para proporcionar el valor de referencia que requiere el control de velocidad PID [Åström., H. et al (2009)] implementado en la tarjeta de desarrollo Arduino, se hace uso de la comunicación serial que en forma natural se puede dar por medio de los puertos USB entre la raspberry Pi y el Arduino.
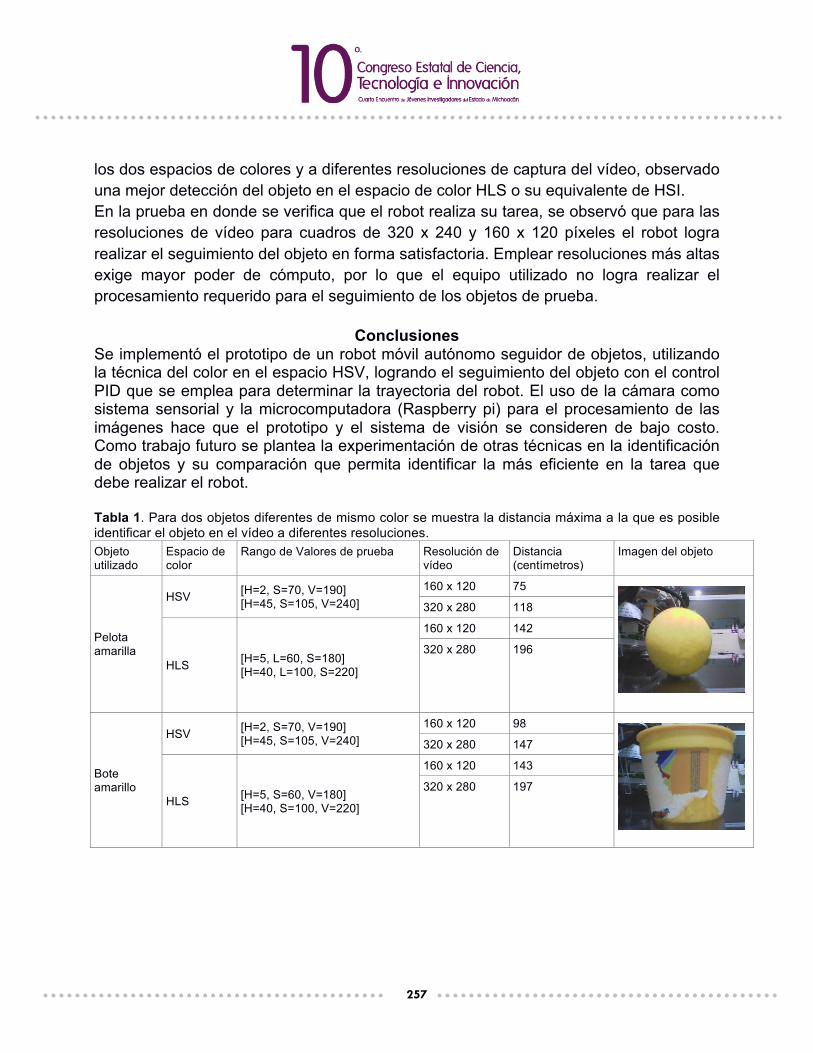
Resultados En la parte experimental. Una prueba consiste en determinar a que distancia se identifica el objeto en el vídeo capturado a diferentes resoluciones, permaneciendo fijo el robot y utilizando los espacios de color HSV y HLS. Se utilizaron dos objetos y manualmente se fijó el rango de valores para las componentes de cada uno de los espacios de colores. La tabla 1 nos muestra los resultados obtenidos en la prueba para
257
los dos espacios de colores y a diferentes resoluciones de captura del vídeo, observado una mejor detección del objeto en el espacio de color HLS o su equivalente de HSI. En la prueba en donde se verifica que el robot realiza su tarea, se observó que para las resoluciones de vídeo para cuadros de 320 x 240 y 160 x 120 píxeles el robot logra realizar el seguimiento del objeto en forma satisfactoria. Emplear resoluciones más altas exige mayor poder de cómputo, por lo que el equipo utilizado no logra realizar el procesamiento requerido para el seguimiento de los objetos de prueba.
Conclusiones Se implementó el prototipo de un robot móvil autónomo seguidor de objetos, utilizando la técnica del color en el espacio HSV, logrando el seguimiento del objeto con el control PID que se emplea para determinar la trayectoria del robot. El uso de la cámara como sistema sensorial y la microcomputadora (Raspberry pi) para el procesamiento de las imágenes hace que el prototipo y el sistema de visión se consideren de bajo costo. Como trabajo futuro se plantea la experimentación de otras técnicas en la identificación de objetos y su comparación que permita identificar la más eficiente en la tarea que debe realizar el robot. Tabla 1. Para dos objetos diferentes de mismo color se muestra la distancia máxima a la que es posible identificar el objeto en el vídeo a diferentes resoluciones. Objeto utilizado
Espacio de color
Rango de Valores de prueba Resolución de vídeo
Distancia (centímetros)
Imagen del objeto
Pelota amarilla
HSV [H=2, S=70, V=190] [H=45, S=105, V=240]
160 x 120 75
320 x 280 118
HLS [H=5, L=60, S=180] [H=40, L=100, S=220]
160 x 120 142
320 x 280 196
Bote amarillo
HSV [H=2, S=70, V=190] [H=45, S=105, V=240]
160 x 120 98
320 x 280 147
HLS [H=5, S=60, V=180] [H=40, S=100, V=220]
160 x 120 143
320 x 280 197
258
BIBLIOGRAFIA Sun, Z., Bebis, G., & Miller, R. (2004): Sun, Z., Bebis, G., & Miller, R. Object detection using feature subset selection. Pattern recognition, 37(11), 2165-2176. 2004. Zhang, H., Gao, W., Chen, X., & Zhao, D. (2006): Zhang, Hongming and Gao, Wen and Chen, Xilin y Zhao, Debin. Object detection using spatial histogram features. Image and Vision Computing, 24(4), 327-341. 2006. Åström., Hägglund, T., Dormido, S. & Sánchez, J. (2009): Åström., Hägglund, T., Dormido, S. & Sánchez, J. Control PID avanzado. Madrid etc: Pearson Educación. 2009


















