Grado en Ingeniería Topografía -...
34
Grado en Ingeniería Grado en Ingeniería Geomática Geomática y Topografía y Topografía Grado en Ingeniería Grado en Ingeniería Geomática Geomática y Topografía y Topografía Escuela Técnica Superior de Ingenieros en Topografía, Geodesia y Cartografía Universidad Politécnica de Madrid Í PROGRAMA DE TEORÍA PROGRAMA DE TEORÍA‐PROBLEMAS DE LA ASIGNATURA: PROBLEMAS DE LA ASIGNATURA: REDES FOTOGRAMÉTRICAS REDES FOTOGRAMÉTRICAS REDES FOTOGRAMÉTRICAS REDES FOTOGRAMÉTRICAS Profesora: Isaura Alonso Profesora: Isaura Alonso Martinez Martinez Profesor: Francisco García Cepeda Profesor: Francisco García Cepeda Profesor: Pedro Profesor: Pedro Miguelsanz Miguelsanz Muñoz Muñoz Septiembre 2015 Septiembre 2015
Transcript of Grado en Ingeniería Topografía -...

Grado en IngenieríaGrado en Ingeniería GeomáticaGeomática y Topografíay TopografíaGrado en Ingeniería Grado en Ingeniería GeomáticaGeomática y Topografíay Topografía
Escuela Técnica Superior de Ingenierosen Topografía, Geodesia y Cartografía
Universidad Politécnica de Madrid
ÍÍPROGRAMA DE TEORÍAPROGRAMA DE TEORÍA‐‐PROBLEMAS DE LA ASIGNATURA:PROBLEMAS DE LA ASIGNATURA:
REDES FOTOGRAMÉTRICASREDES FOTOGRAMÉTRICASREDES FOTOGRAMÉTRICASREDES FOTOGRAMÉTRICAS
Profesora: Isaura Alonso Profesora: Isaura Alonso MartinezMartinez
Profesor: Francisco García CepedaProfesor: Francisco García Cepeda
Profesor: Pedro Profesor: Pedro MiguelsanzMiguelsanz MuñozMuñoz
Septiembre 2015Septiembre 2015

Asignatura de Asignatura de Redes FotogramétricasRedes Fotogramétricas: : BIBLIOGRAFÍA BIBLIOGRAFÍA
José L. Lerma García: Fotogrametría Moderna: Analítica y Digital,, (2002)
Edward Mikhail, James Bethel, Chris McGlone: Introduction to Modern
Paul R. Wolf, Bon A. Dewitt : Elements of Photogrammetry (2000)
, ,Photogrammetry, (2001)
Karl Kraus: Photogrammetry: Geometry from images and Laser Scans,(2007)(2007)
Toni Schenk : Fotogrametría digital , (2002)
Rainer Sandau: Digital Airborne Camera, (2010)

Teoría. Unidad Didáctica 2:Teoría. Unidad Didáctica 2:Redes FotogramétricasRedes Fotogramétricas
Tema 3. ‐Triangulación aérea por modelos independientes .
3.1. ‐Principio básico. Modelo matemático.
3.2. ‐Ajuste en bloque planimetría‐altimetría (M‐43).
3.3. ‐Ajuste en bloque espacial (M‐7).
3.4. ‐Estructura de los sistemas de ecuaciones.
3.5. ‐Planteamiento práctico (resolución de ejercicios).

Teoría. Unidad Didáctica 2:Teoría. Unidad Didáctica 2:Objetivos específicosObjetivos específicos
• Definir y calcular los parámetros que determinan la geometría de un vuelo con finesfotogramétricos .g
• Asociar los sistemas de coordenadas de una imagen/es con los procesos de orientación interna yexterna.
• Definir y calcular un trabajo de triangulación aérea clásica .y j g
• Identificar y explicar los resultados de triangulación aérea clásica .
• Conocer y calcular, si se dispone de datos adicionales INS/GNSS, las ventajas/inconvenientes enun trabajo de triangulación aérea.j g
• Definir y calcular un trabajo de triangulación aérea automática.
• Conocer y aplicar las estrategias de búsqueda automática de puntos homólogos sobre imágenesadyacentes .y
• Conocer y aplicar los procedimientos automáticos de orientación externa indirecta.
• Conocer los procedimientos de cálculo de la orientación externa directa.

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Principio básico. Modelo matemático.Principio básico. Modelo matemático.
• Principio básico
En un bloque de modelos estereoscópicos individuales, cada
d l t id i d di t t imodelo es construido independientemente con su propio
sistema de coordenadas arbitrario, en el cual se determinan las
coordenadas de los puntos y las de los centros de proyección.
Modelos orientados individualmenteModelos orientados individualmente
• Modelo matemático utilizado en el ajuste
El ajuste en bloque se realiza mediante la orientación absoluta
simultánea de todos los modelos usando para ello lasimultánea de todos los modelos, usando para ello la
transformación tridimensional conforme:

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (Maltimétrico (M‐‐43)43)
• Procedimiento iterativo en el que el primer paso se determinan las incógnitas planimétricas (a, b, Tx, Ty) y en un paso posterior, se determinan las altimétricas (Tz) de la transformación 3D de semejanza.
• A partir de la transformación 3D de semejanza:
• Es decir, descompone el proceso de determinación de los 7 parámetros en dos procesos consecutivos:
p j
• Obtenemos una expresión linealizada:
• Nos quedamos con la parte planimétrica de la transformación, es decir nos quedamos con el
Terreno Modelo
giro en planimetría y hacemos Tz = 0:
TxybxaX• Obtenemos una ecuación lineal que no requiere valores
i d l i ó it i i i li l ál l
TyyaxbY
aproximados para las incógnitas que inicialicen el cálculo:
topografia
Nota adhesiva
A planimetria afecta kappa
Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (Maltimétrico (M‐‐43)43)
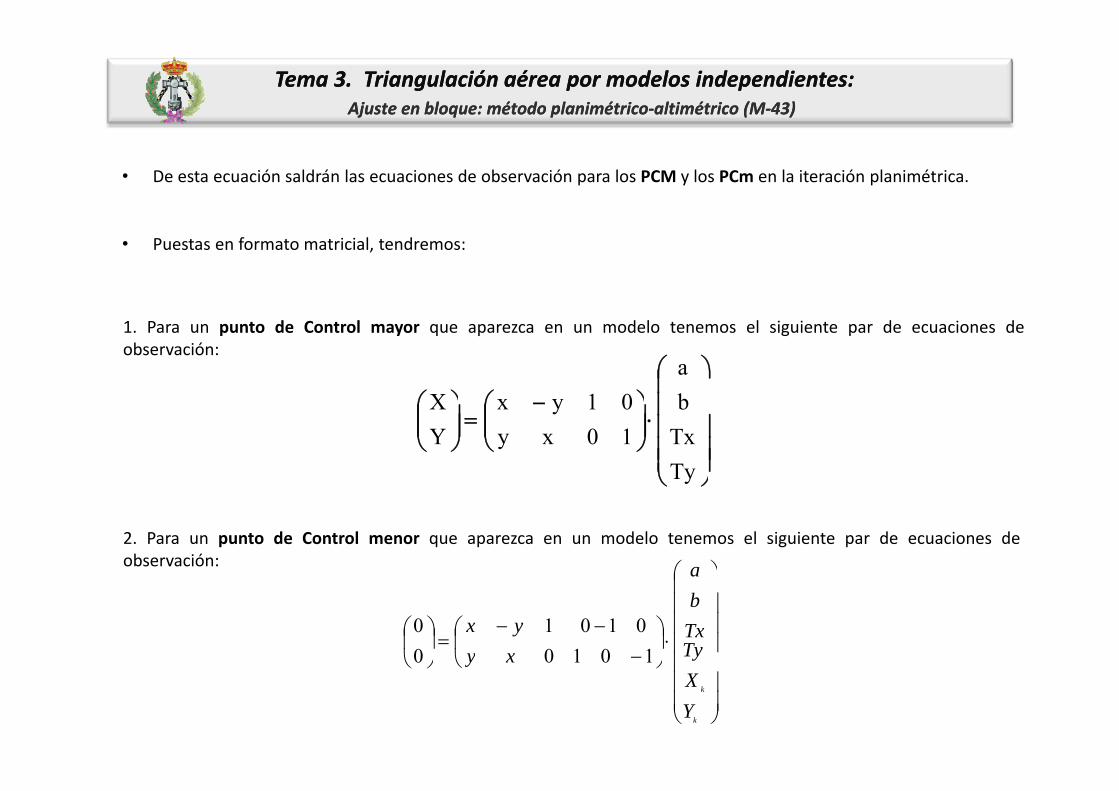
• De esta ecuación saldrán las ecuaciones de observación para los PCM y los PCm en la iteración planimétrica.
• Puestas en formato matricial, tendremos:
1. Para un punto de Control mayor que aparezca en un modelo tenemos el siguiente par de ecuaciones deobservación:
ba
01X
TyTxb
10xy01yx
YX
2. Para un punto de Control menor que aparezca en un modelo tenemos el siguiente par de ecuaciones deobservación:
a
TyTxba
xyyx
10100101
00
k
k
YX
y

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐43)43)
Inicio de la iteración planimétrica.
• Se parte del planteamiento de las ecuaciones de observación de los PCM y PCm
• Se resuelven las ecuaciones y obtienen:
• Coordenadas terreno X, Y de los PCm.
• Se parte del planteamiento de las ecuaciones de observación de los PCM y PCm.
,
• Valores para las incógnitas a, b, Tx, Ty de cada uno de los modelos. De ahí se obtiene )( 22 ab
a y b son coeficientes dependientes del factor de ka cos
• Con los valores de a, b, Tx, Ty que se acaban de obtener y los valores aproximados para Tz y c, seintroducen en la ecuación de la transformación 3D de semejanza linealizada y se obtienen las
escala y del ángulo de giro planimétrico k.senkb
coordenadas terreno X, Y, Z de los puntos de enlace:
xyzxXVX
0010
Terreno Modelo
zy
TTxyz
xzyZY
VV
y
xZ
Y 10000100
• Estas coordenadas terreno X, Y, Z de los puntos de enlace entrarán como coordenadas modelo x, y, z en laiteración altimétrica:
Tz
Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐43)43)
1001 1011
100 101
1
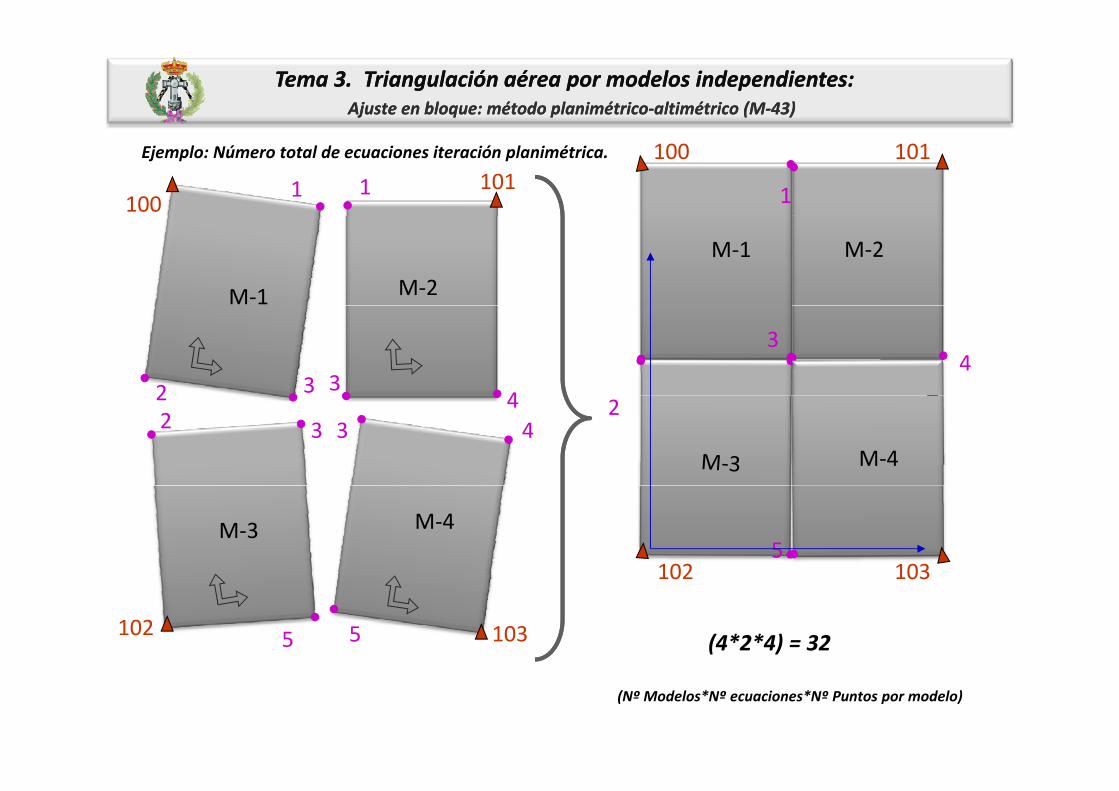
Ejemplo: Número total de ecuaciones iteración planimétrica.
M‐1
1
M‐2
M‐1 M‐2
2 3 34 4
34
2
34
42 3
42
M‐43 4
M‐3 M‐4
102 1035
102 1035 5
102 103
(4*2*4) = 32
(Nº Modelos*Nº ecuaciones*Nº Puntos por modelo)

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐43)43)
1001 1011
100 101
1
Ejemplo: Número total de incógnitas iteración planimétrica.
M‐1
1
M‐2
M‐1 M‐2
2 3 34 4
34
2
34
42 3
42
M‐43 4
M‐3 M‐4
102 1035
102 1035 5
102 103
PCm (5*2) = 10(Nº PCm*Nº incógnitas)g
Modelo de transformación (4*4) = 16(Nº Modelos*Nº incógnitas mod trans planim)
topografia
Nota adhesiva
4 incognitas por cada modelo(factor de escala, giro en kappa y traslaciones en x e y)y por cada punto de control menor 2 incognitas

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐43)43)
Sistema de ecuaciones de observación iteración planimétrica.
b
a01yxX
Ecuación PCM.
TyTx10xyY
TyTxba
1010xy0101yx
00
Ecuación PCm.
k
k
YX
AA XX LL==

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐43)43)
• Inicio de la iteración Altimétrica:
• Las coordenadas terreno X, Y, Z de los puntos de enlace obtenidos en la iteración planimétrica entrarán como, , p pcoordenadas modelo x, y, z.
• Se hace λ = Tx = Ty = 0 en la transformación 3D de semejanza, es decir nos quedamos con la componentealtimétrica de dicha transformación Δ, Δ, Tz.
X 1 0 ∆ x 0Y 0 1 ‐∆ y + 0Z ‐ ∆ ∆ 1 z Tz
• Se obtendrá una ecuación lineal que no requiere valores aproximados para las incógnitas:
• De esta ecuación saldrán las ecuaciones de observación para los PCM y los PCm en la iteración altimétrica.
• Puestas en formato matricial, tendremos:

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐4343))
En este caso hay tres tipos de ecuaciones de observación, se debe incluir la ecuación de los centros de proyección:
1. Para el caso de un punto de control mayormedido en un modelo:
zZ*1xy
Tz
2. Para el caso de un punto de control menormedido en un modelo (las coordenadas planimétricas son conocidasdel ajuste planimétrico):
zT
*11xyz
Zz

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐4343))
3. Para el caso de los centros de proyección, hay que recordar que no se tuvieron en cuenta durante el ajusteplanimétrico, pero sí lo harán en el ajuste altimétrico:
Modelos orientados individualmente
• La ecuación para los centros de proyección se obtiene a partir de la transformación 3D de semejanza linealizada y particularizada para el caso altimétrico en que λ = Tx = Ty = 0 .
Modelos orientados individualmente
x
T010000010x0
z
zy
YX
1001xy01000z z
Z

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐4343))
• Se resuelven las ecuaciones y obtienen:
• Coordenadas Z terreno de los PCm.
• Valores para las incógnitas Δ, Δ, Tz de cada uno de los modelos.
• Coordenadas terreno X, Y, Z de todos los centros de proyección.
• Finalización del primer proceso iterativo.
• Con los valores de Δ, Δ, Tzmás los obtenidos antes de a, b, Tx, Ty se vuelve a la transformación
3D de semejanza para obtener las coordenadas terreno X, Y, Z que se consideran modelo x, y, z en
un nuevo proceso de iteración planimétrica y luego altimétrica.

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐4343))
100101
100 1011Ejemplo: Número total de ecuaciones iteración altimétrica.
M‐1
1 1
M‐2
1M‐1 M‐2
2 3 3 42 3
42 3 3
34
42
34
M‐4
34
M‐3 M‐4
102 1035 5
102 1035(4*1*4) = 16
(Nº Puntos por Modelo*Nº ecuaciones*Nº de modelos)( p )
(4*3*2) = 24(Nº Modelos*Nº ecuaciones*Nº CP cada modelo)

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐4343))
100101
100 1011Ejemplo: Número total de incógnitas iteración altimétrica:
M 1
1001 1
M‐2
1 M‐1 M‐2
M‐1 M 2
423
4
2 3 3
34
42
3 M‐434
4
M‐3 M‐4102 1035
102 1035 5
5
PCm (5*1) = 5
CP (6*3) = 18(Nº CP*Nº incógnitas mod trans)
102 103 (Nº PCm*Nº incógnitas)
Modelo de transformación (4*3) = 12(Nº Modelos*Nº incógnitas mod trans altim)

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método Ajuste en bloque: método planimétricoplanimétrico‐‐altimétrico (altimétrico (MM‐‐4343))
Ecuación PCM.Sistema de ecuaciones de observación iteración altimétrica.
zZT
*1xy
z
Ecuación PCm.
zT
*11xyz
Z
E ió CP
yx
T01000z0010x0
z
Ecuación CP.
z
y
ZYX
1001xy
AA XX LL==
topografia
Nota adhesiva
X Y Z del centro de proyección

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método general (MAjuste en bloque: método general (M‐‐7)7)
• Cada modelo está sujeto a una única transformación tridimensional de semejanza de siete parámetros.
Z Z´Sistema de referencia
y
z
Y´O´
X
Y
X´ TzO
O
xTy
Ty
topografia
Nota adhesiva
7 incognitas 3 giros, 3 traslaciones y el factor de escala

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método general (MAjuste en bloque: método general (M‐‐7)7)
• Debido a que dichas ecuaciones no son lineales se tienen que someter a un proceso de linealización pudiendo
• Cada modelo plantea un sistema de ecuaciones en el que se determinan los 7 parámetros al mismo tiempo (λ, Δ, Tx, Ty, Tz) de la transformación 3D de semejanza.
• Debido a que dichas ecuaciones no son lineales, se tienen que someter a un proceso de linealización, pudiendoescribir cada ecuación de la forma siguiente
zxx
0xx dTTF...dX
XFF0F
z
0z00xx TX
zyy
0yy dTTF
...dXXF
F0F
0z0 TX
zzz
0zz dTTF...dX
XFF0F
0z0 TX
• Si llamamos a las derivadas parciales de las funciones respecto de los parámetros incógnitas:
,....Fr,Fr,.....,F
r,F
r,.....,Fr,Fr z32
z31
y22
y21
x12
x11
Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método general (MAjuste en bloque: método general (M‐‐7)7)
0FdXdTrdTrdTrdrdrdrdrF 17161514131211 0FdZdTrdTrdTrdrdrdrdrF
0FdYdTrdTrdTrdrdrdrdrF0FdXdTrdTrdTrdrdrdrdrF
037363534333231
0yz27y26x2524232221y
0xz17y16x1514131211x
0zz37y36x3534333231z
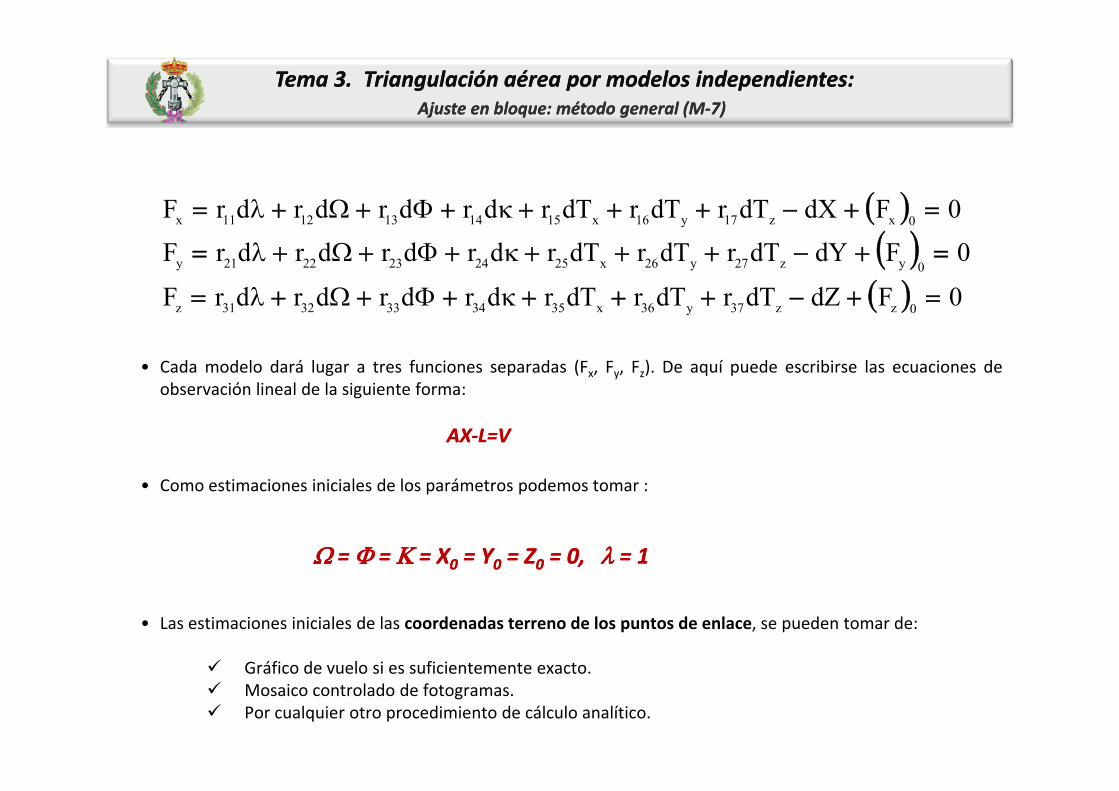
• Cada modelo dará lugar a tres funciones separadas (Fx, Fy, Fz). De aquí puede escribirse las ecuaciones deobservación lineal de la siguiente forma:g
AXAX‐‐L=VL=V
• Como estimaciones iniciales de los parámetros podemos tomar :• Como estimaciones iniciales de los parámetros podemos tomar :
== == == XX00 == YY00 == ZZ00 == 00,, == 11
• Las estimaciones iniciales de las coordenadas terreno de los puntos de enlace, se pueden tomar de:
Gráfico de elo si es s ficientemente e acto Gráfico de vuelo si es suficientemente exacto. Mosaico controlado de fotogramas. Por cualquier otro procedimiento de cálculo analítico.

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método general (MAjuste en bloque: método general (M‐‐7)7)
Ecuaciones de observación para un PCM:
1. Para el caso de un punto de control mayormedido en un modelo:
dd
0
0x
27262524232221
17161514131211
)F()F(
ddd
*rrrrrrrrrrrrrr
0z
0y
y
x37363534333231
27262524232221
)F()(
dTdTrrrrrrr
z
y
dT

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método general (MAjuste en bloque: método general (M‐‐7)7)
Ecuaciones de observación para un PCm:
2. Para el caso de un punto de control menor, las coordenadas introducen tres incógnitas adicionales (dX, dY, dZ),las cuales serán las correcciones a efectuar a las coordenadas tomadas como aproximadas.
ddd
017161514131211
)()(
*010001 x
x FF
dTdd
rrrrrrr
0
0
37363534333231
27262524232221
)()(*
100010
z
y
z
y FF
dXdTdT
rrrrrrrrrrrrrr
dZdYdX
topografia
Nota adhesiva
Punto de control menor o punto de enlace

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método general (MAjuste en bloque: método general (M‐‐7)7)
100 1 1011100 1011
Ejemplo: Número total de ecuaciones.
M 1
1
M‐2M‐1 M‐2
M‐1
22 3
42 3 3
34
423
4
M‐43 4
M‐3 M‐4
M‐4
102 1035 5
102 1035
(4*3*6) = 72(Nº Modelos*Nº ecuaciones*Nº Puntos por modelo)

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Ajuste en bloque: método general (MAjuste en bloque: método general (M‐‐7)7)
1 1011
100 1011Ejemplo: Número total de incógnitas
100 1
1
1011M‐1 M‐2
M‐1 M‐2
4
2 34
2 3 3
3
423
M‐43 43
4
M‐3 M‐4 102 1035
5 5
103
PCm (5*3) = 15
CP (6*3) = 18(Nº CP*Nº incógnitas mod trans)
102 1035 5(Nº PCm*Nº incógnitas)
Modelo de transformación (4*7) = 28(Nº Modelos*Nº incógnitas mod trans)TOTAL = 61 Incógnitas

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Estructura de los sistemas:Estructura de los sistemas: método método planimétricoplanimétrico‐‐altimétrico (Maltimétrico (M‐‐43)43)
)1,*2()1,*2()1,*2mod*4()*2mod*4,*2( puntopuntoPCmeloPCmelopunto VLXA
1. Aerotriangulación planimétrica (M‐4) Sistema Ligado
),(),(),(),( ppp
2. Aerotriangulación planimétrica (M‐4) Sistema Libre
)1,*2*2()1,*2*2()1,*2*2mod*4()*2*2mod*4,*2*2( PCMpuntoPCMpuntoPCMPCmeloPCMPCmeloPCMpunto VLXA ),(),(),(),( ppp
a
Ecuación PCM.
TyTxba
10xy01yx
YX
TyTxba
1010xy0101yx
00
Ecuación PCm.
k
k
YX
y1010xy0

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Estructura de los sistemas: método Estructura de los sistemas: método planimétricoplanimétrico‐‐altimétrico (Maltimétrico (M‐‐43)43)
3. Aerotriangulación altimétrica (M‐3) Sistema Ligado
)1,3*1()1,*3*1()1,3*1mod*3()*3*1mod*3,*3*1( CPpuntoCPpuntoCPPCmeloCPPCmeloCPpunto VLXA 4 Aerotriangulación altimétrica (M 3) Sistema Libre
)1,*3*1*1()1,3*1*1()1,3*1*1mod*3()*3*1*1mod*3,3*1*1( CPPCMpuntoCPPCMpuntoCPPCMPCmeloCPPcMPcmeloCPPCMpunto VLXA 4. Aerotriangulación altimétrica (M‐3) Sistema Libre
zZ*1xy
Ecuación PCM.
Tz
Ecuación PCm.
z
ZT
*11xyz
x
T0010x0
Ecuación CP.
zy
ZYXT
1001xy01000z z

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Estructura de los sistemas: método general (MEstructura de los sistemas: método general (M‐‐7)7)
1 A t i l ió t idi i l (M 7) Si t Li d1. Aerotriangulación tridimensional (M‐7) Sistema Ligado
)1,*3()1,*3()1,*3mod*7()*3mod*7,*3( puntopuntoPCmeloPCmelopunto VLXA )()()()( ppp
2. Aerotriangulación tridimensional (M‐7) Sistema Libre
)1,*3*3()1,*3*3()1,*3*3mod*7()*3*3mod*7,*3*3( PCMpuntoPCMpuntoPCMPCmeloPcMPCmeloPcMpunto VLXA
2. Aerotriangulación tridimensional (M 7) Sistema Libre

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Planteamiento prácticoPlanteamiento práctico
Características del Bloque fotogramétrico. • Bloque de 6 modelos y 2 pasadas.
4 f d• 4 fotos por pasada.
• 20 puntos de enlace ( 1 a 20 ). PCm.
• 6 puntos apoyo ( A a F ). PCM.
1A
13 18E1
A
2 7
A
2
6
7
11
12
16
6
7
11
12 17
D 11
12
16
17
D6 11
D16
p p y ( )
2 O1
B3 8
3
B 8 13 8 1318
E
12
1318
E
Foto 1 Foto 2 Foto 3 Foto 4O2
7
O3
12
O4
17
3B
14
8
9
3
B
4
8
9
13
18
8
9
13
14 19
E 13
14
E
3
B
4
813
E18
14 19
O5 O6
94 O7 O8
1914
1510 5
C 10 10 1520
F 155
C
Foto 5 Foto 6 Foto 7 Foto 8
15 20
10C5
15 F20
Punto de Control Menor
Punto de Control Mayor
Centro de Proyección

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Planteamiento prácticoPlanteamiento práctico
El cálculo implica el ajuste MMCC de 2 tipos de ecuaciones de observación:
1) Se utilizan los puntos de control mayor:
Xa = ( m11 xai + m21 yai + m31 zai ) + TxiYa = ( m12 xai + m22 yai + m32 zai ) + TyiZa = ( m13 xai + m23 yai + m33 zai ) + Tzi
8 * 3 = 24Ecuaciones
Punto Modelo i Punto Modelo i
A 1 2 D 3 4 8 3 = 24
Puntos de Control MayorObservados por modelo
A 1‐2 D 3‐4B 1‐2 E 3‐4B 5‐6 E 7‐8C 5‐6 F 7‐8

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Planteamiento prácticoPlanteamiento práctico
El cálculo implica el ajuste MMCC de 2 tipos de ecuaciones de observación:
2) Se utilizan la condición de que la diferencia en la transformación de
coordenadas de los puntos de Control menor y comunes, entre modelos
adyacentes es cero:adyacentes, es cero:
( m11i xai + m21i yai + m31i zai ) + Txi – [ ( m11j xaj + m21j yaj + m31j zaj ) + Txj ] = 0( m12i xai + m22i yai + m32i zai ) + Tyi – [ ( m12j xaj + m22j yaj + m32j zaj ) + Tyj ] = 0( m13i xai + m23i yai + m33i zai ) + Tzi – [ ( m13j xaj + m23j yaj + m33j zaj ) + Tzj ] = 0

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Planteamiento prácticoPlanteamiento práctico
Punto Modelo i Modelo J3 1‐2 5‐66 1 2 2 3
Número total de ecuaciones Método M7:
6 1‐2 2‐37 1‐2 2‐38 1‐2 2‐38 1‐2 5‐68 1‐2 6‐78 2‐3 5‐68 2‐3 6‐78 5‐6 6‐79 5‐6 6‐710 5‐6 6‐7
Puntos comunes de conexión entre modelos ( PCM, CP, PCm )
10 5 6 6 711 2‐3 3‐412 2‐3 3‐413 2‐3 3‐413 2‐3 6‐713 2 3 7 8
(28 Puntos Mi + 28 Puntos Mj) * 3 ecuaciones =16813 2‐3 7‐813 3‐4 6‐713 3‐4 7‐813 6‐7 7‐814 6‐7 7‐8
Ecuaciones
15 6‐7 7‐818 3‐4 7‐8B 1‐2 5‐6E 3‐4 7‐802 1‐2 2‐3
168 + 24 = 19202 1 2 2 303 2‐3 3‐406 5‐6 6‐707 6‐7 7‐8
Total Ecuaciones

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Planteamiento prácticoPlanteamiento práctico
Número total de ecuaciones Método M7:

Tema 3. Triangulación aérea por modelos independientes:Tema 3. Triangulación aérea por modelos independientes:Planteamiento prácticoPlanteamiento práctico
3. El cálculo implica determinar las siguientes incógnitas:
Número total de incógnitas Método M7:
Parámetros de transformación por modelo Centros de Proyección ( C. P. )
Puntos de Control menor, PCm
7 * 6 = 42 20 * 3= 60 8 * 3 = 24
Nº total de incógnitas126
RedundanciaRedundancia192 192 ‐‐ 126 = 66126 = 66
topografia
Nota adhesiva
A Paquito no le cuadra, ver apuntes