Generación de Modelos 3D a Partir de Datos de Rango … · Red Temática “TAVARCA” Alicante,...
44
Generación Generación d d e Modelos e Modelos 3D 3D a Partir a Partir d d e Datos e Datos d d e Rango e Rango d d e Vistas Parciales. e Vistas Parciales. Santiago Salamanca Santiago Salamanca Miño Miño Escuela de Ingenierías Industriales Escuela de Ingenierías Industriales Universidad de Extremadura Universidad de Extremadura (UNED, UCLM, UEX) (UNED, UCLM, UEX)
-
Upload
vuongduong -
Category
Documents
-
view
213 -
download
0
Transcript of Generación de Modelos 3D a Partir de Datos de Rango … · Red Temática “TAVARCA” Alicante,...

Generación Generación dde Modelos e Modelos 3D3Da Partir a Partir dde Datos e Datos dde Rango e Rango
dde Vistas Parciales.e Vistas Parciales.
Santiago SalamancaSantiago Salamanca MiñoMiñoEscuela de Ingenierías IndustrialesEscuela de Ingenierías Industriales
Universidad de ExtremaduraUniversidad de Extremadura(UNED, UCLM, UEX)(UNED, UCLM, UEX)
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Introducción (I)Introducción (I)
nn ¿Qué es un modelo de representación 3D?¿Qué es un modelo de representación 3D?nn Ente abstracto que permite considerar los objetos físicos Ente abstracto que permite considerar los objetos físicos
como como itemsitems manipulables en un computador.manipulables en un computador.
nn Algunos tipos de representación:Algunos tipos de representación:nn Representación de Frontera.Representación de Frontera.nn Representación de Representación de SplineSpline..nn Representación de Barrido.Representación de Barrido.nn Árboles Octales.Árboles Octales.nn Geometría Constructiva.Geometría Constructiva.nn Representación Esférica.Representación Esférica.nn ......
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Introducción (II)Introducción (II)
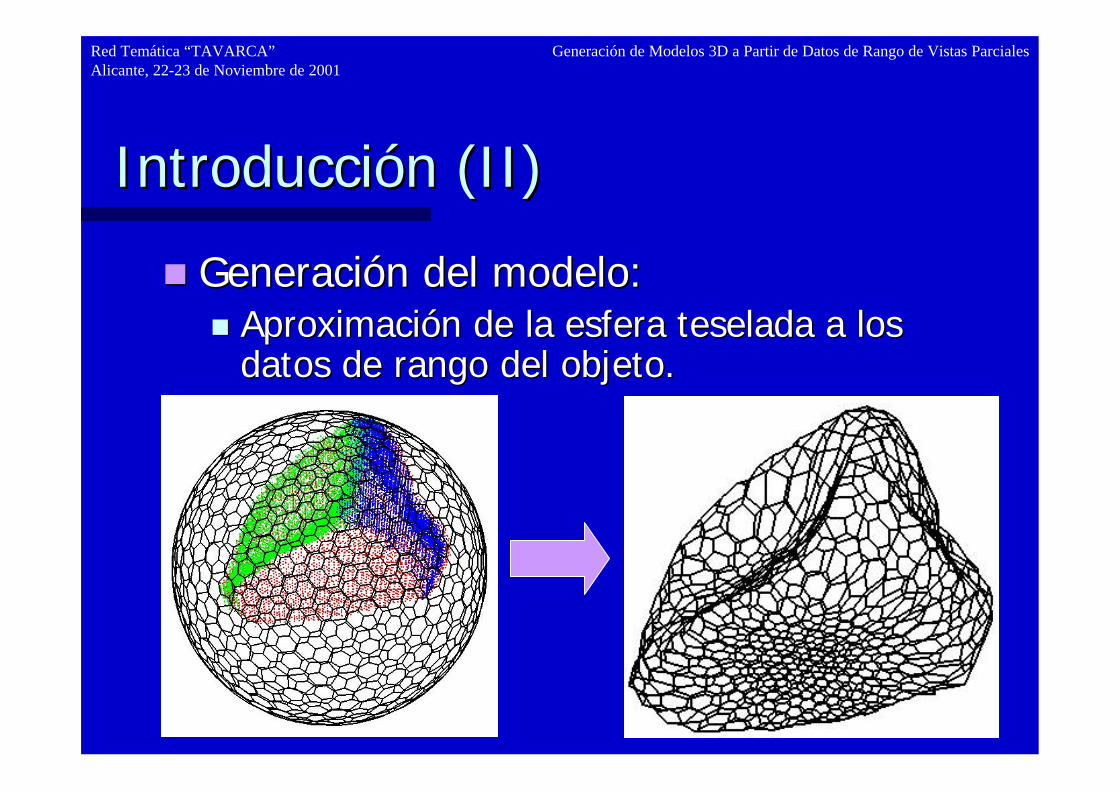
nn Generación del modelo:Generación del modelo:nn Aproximación de la esfera teselada a los Aproximación de la esfera teselada a los
datos de rango del objeto.datos de rango del objeto.

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Introducción (III)Introducción (III)
nn Propiedades de los modelos esféricos.Propiedades de los modelos esféricos.nn La esfera esLa esfera es cuasicuasi regular formada por regular formada por
hexágonos y pentágonoshexágonos y pentágonos..nn El número de nodos usados en la El número de nodos usados en la
representación es fijo (impuesto por la representación es fijo (impuesto por la esfera teselada).esfera teselada).
nn Los modelos deben serLos modelos deben ser cuasicuasi regulares, es regulares, es decir, la distancia entre nodos debe ser decir, la distancia entre nodos debe ser similar (para tareas de reconocimiento y similar (para tareas de reconocimiento y posicionamiento).posicionamiento).
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Introducción (IV)Introducción (IV)
nn Métodos desarrollados hasta ahora:Métodos desarrollados hasta ahora:nn Fusión de los datos de rango que definen Fusión de los datos de rango que definen
al objeto (posiblemente también: al objeto (posiblemente también: homogeneización y cierre de la superficie)homogeneización y cierre de la superficie)
nn Aproximación de la esfera completa a los Aproximación de la esfera completa a los datos de rango definidos anteriormente.datos de rango definidos anteriormente.
nn Problema: La fusión y tratamiento de Problema: La fusión y tratamiento de datos de rango es muy complejadatos de rango es muy compleja..

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
nn Nuestro objetivo:Nuestro objetivo:nn ModelaModelarr los datos de rango de cada vista parcial los datos de rango de cada vista parcial
usando un porción de esfera.usando un porción de esfera.nn Fusión de los modelos parciales.Fusión de los modelos parciales.
nn Primera Primera aproximaciónaproximación::
Introducción (V)Introducción (V)
DATOS DE RANGODATOS DE
RANGOMODELADOMODELADO ROTACIÓN ROTACIÓN FUSIÓNFUSIÓN
Registration Integration
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
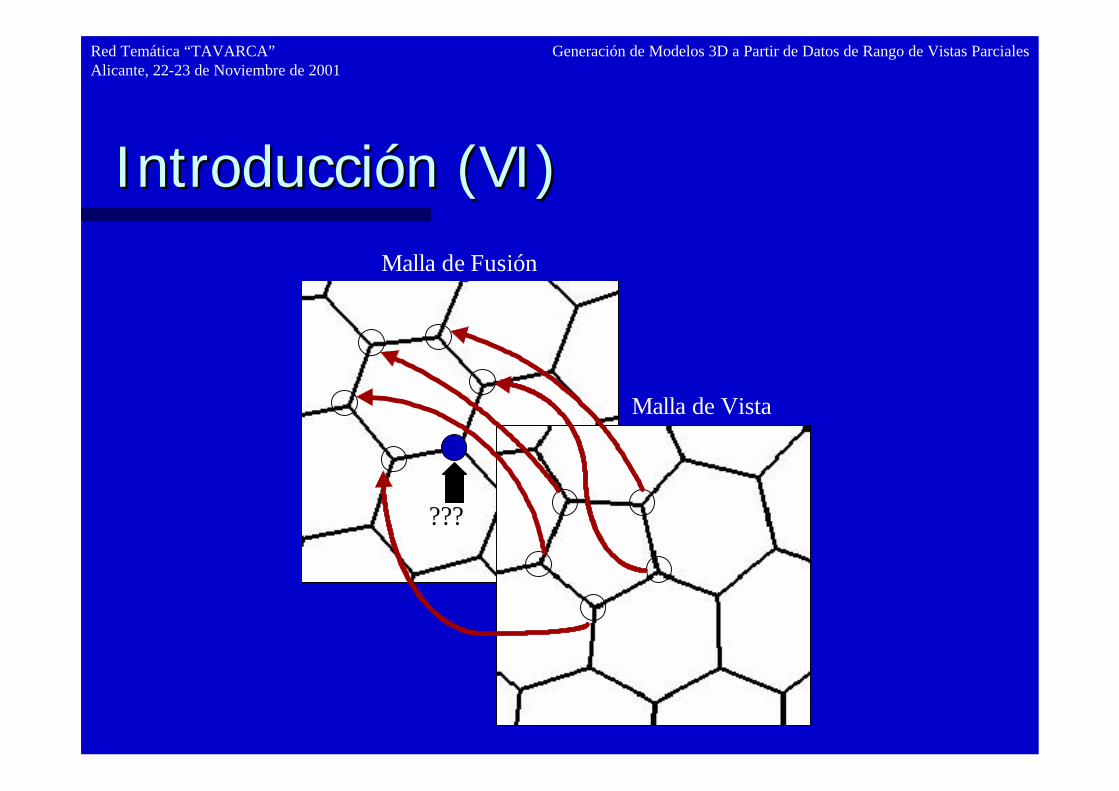
Introducción (VI)Introducción (VI)
???
Malla de Fusión
Malla de Vista
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
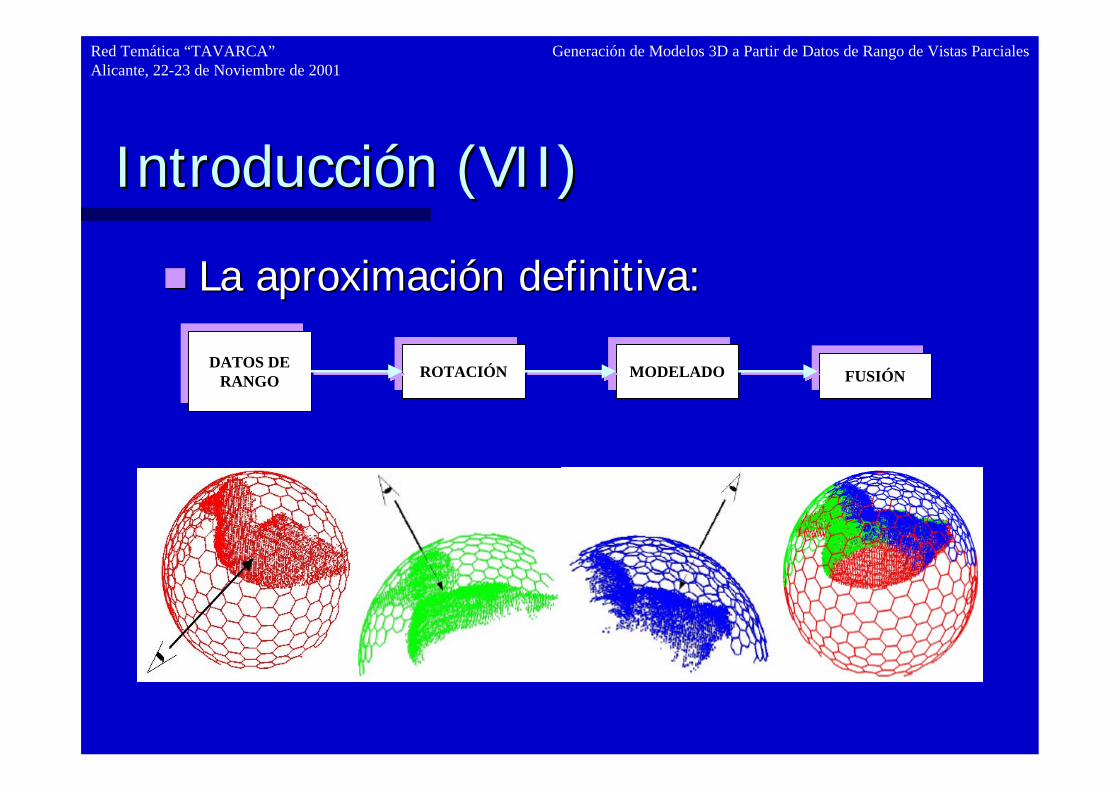
IntroducciIntroduccióón (VII)n (VII)
nn La aproximación definitiva:La aproximación definitiva:
DATOS DE RANGODATOS DE
RANGOROTACIÓNROTACIÓN MODELADO MODELADO FUSIÓNFUSIÓN

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
IntroducciIntroduccióón (VIII)n (VIII)
nn Esquema detallado del modelado parcialEsquema detallado del modelado parcial
Range Image Partial Model Reconstruction ofthe Complete Model
NormalizationData Alignment
S
Selecting a part of T Ti
Fitting T i T 'i
Data Base
Model 1Model 2
.
.
.Model i
Merging ∪∪T 'i
Closing the model T '
Partial MeshRedefining

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Generación del modelo parcial (I)Generación del modelo parcial (I)
Vn
Pj
O
Ni
(b)
Π T1/2
OriginalPosition
Ov
NewPosition
h h
+
T 'i

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Generación del modelo parcial (II)Generación del modelo parcial (II)
nn Normalización de los datos:Normalización de los datos:nn Los datos del objeto deben estar referidos Los datos del objeto deben estar referidos
al sistema de coordenadas definido por la al sistema de coordenadas definido por la esfera esfera ⇒⇒ NormalizaciNormalizacióón de n de ééstos.stos.
( )[ ]OO
−
−=
XX
Smodmax

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Generación del modelo parcial (III)Generación del modelo parcial (III)
nn Para calcular el “centro” del objeto (O) usamos un Para calcular el “centro” del objeto (O) usamos un plano que denominamos plano de corte (plano que denominamos plano de corte (ΠΠ) y que) y quetiene como vector normal a él el vector director tiene como vector normal a él el vector director del eje de visión y contiene al dato de rango más del eje de visión y contiene al dato de rango más alejado desde el punto de vista.alejado desde el punto de vista.
Π

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Generación del modelo parcial (IV)Generación del modelo parcial (IV)
nn Al normalizar con respecto a este centro, el Al normalizar con respecto a este centro, el plano divide a la esfera en dos hemisferios plano divide a la esfera en dos hemisferios ⇒⇒ usaremos el hemisferio musaremos el hemisferio máás cercano al s cercano al punto de vista (punto de vista (FFii) para realizar el ) para realizar el modelado.modelado.
T1/2

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Generación del modelo parcial (V)Generación del modelo parcial (V)
nn Fase de aproximación.Fase de aproximación.
Pj
O
Ni ( )jiii PNONON ⋅+= α'
Donde:
1. a próxima constante una es
...1 mínima es /
.
α
njproyOPSP
TN
j
i
OP
ONjj
i
=∀−∈
∈
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
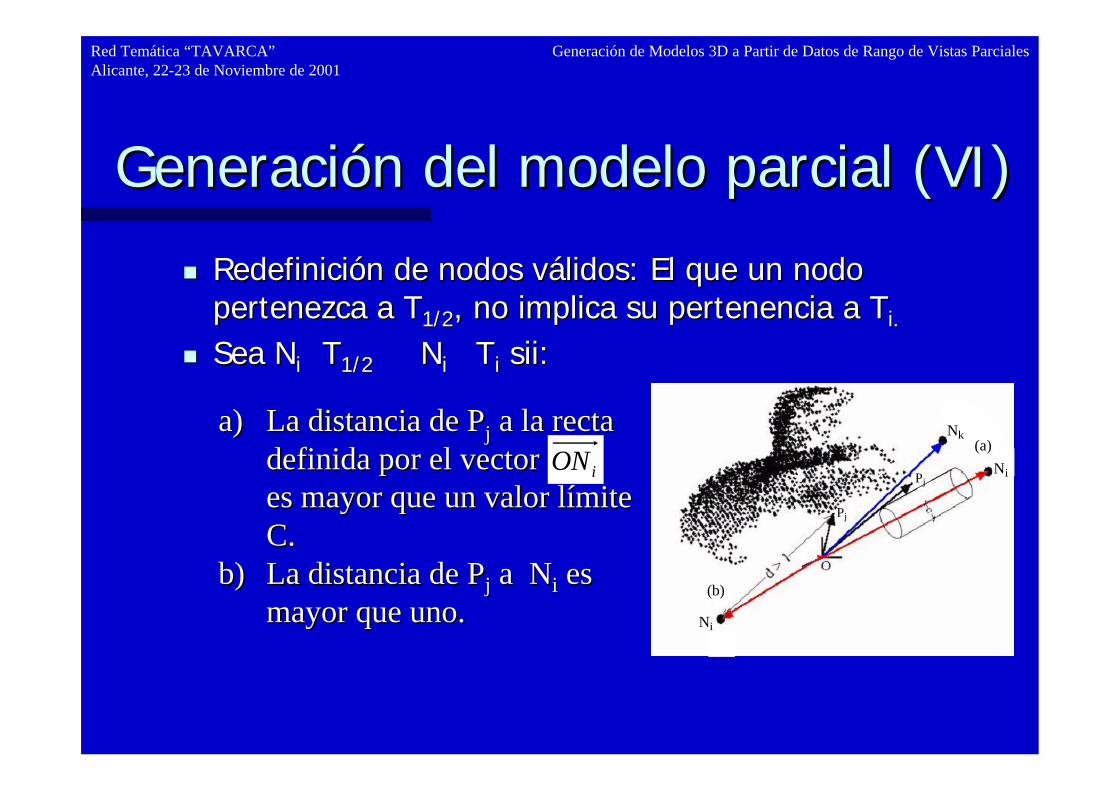
Generación del modelo parcial (VI)Generación del modelo parcial (VI)
nn Redefinición de nodos válidos: El que un nodo Redefinición de nodos válidos: El que un nodo pertenezca a Tpertenezca a T1/21/2, no implica su pertenencia a T, no implica su pertenencia a Ti.i.
nn Sea NSea Nii∈∈TT1/2 1/2 ⇒⇒ NNii ∉∉TTii siisii::
a)a) La distancia de La distancia de PPjj a la recta a la recta definida por el vectordefinida por el vectores mayor que un valor les mayor que un valor líímite mite C.C.
b)b) La distancia de La distancia de PPjj a Na Nii es es mayor que uno.mayor que uno.
iON Ni
Nk
Pj
Pj
Ni
(a)
(b)
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
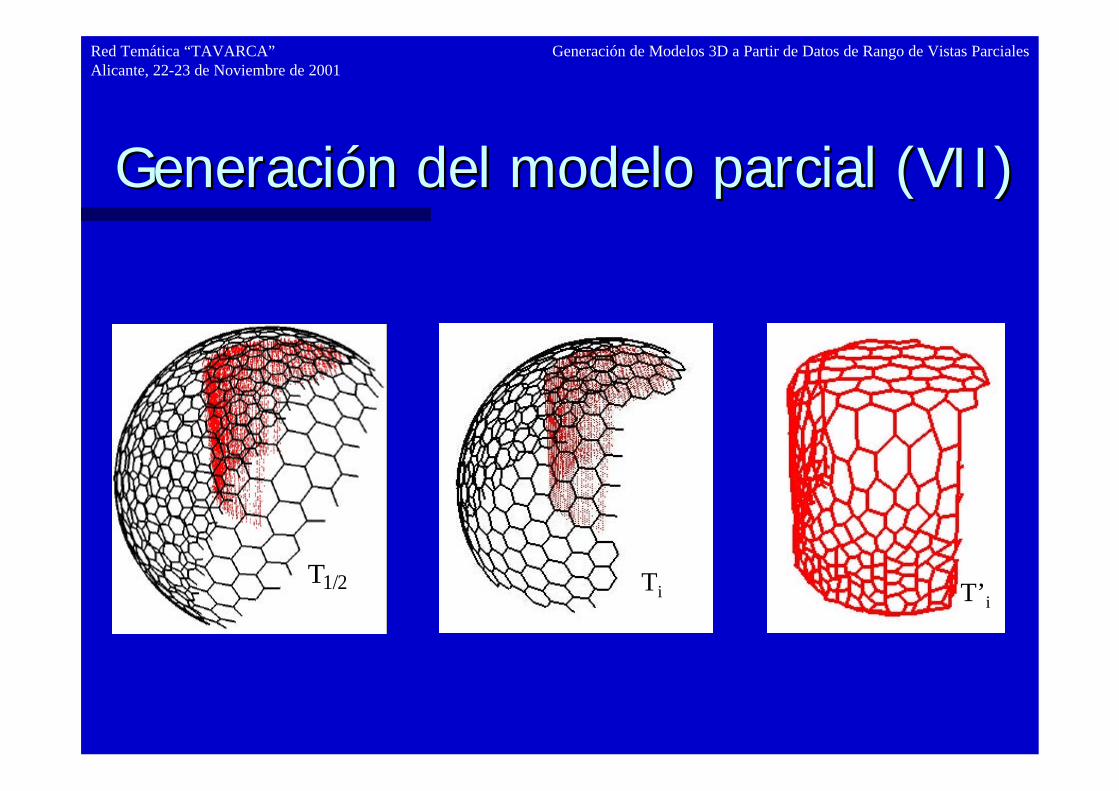
Generación del modelo parcial (VII)Generación del modelo parcial (VII)
T1/2 Ti T’i

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Generación del modelo parcial (VIII)Generación del modelo parcial (VIII)
nn Regularización local.Regularización local.
OriginalPosition
Ov
NewPosition
h h

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
GeneraciGeneracióón del modelo parcial (IX)n del modelo parcial (IX)

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
GeneraciGeneracióón del modelo parcial (X)n del modelo parcial (X)

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
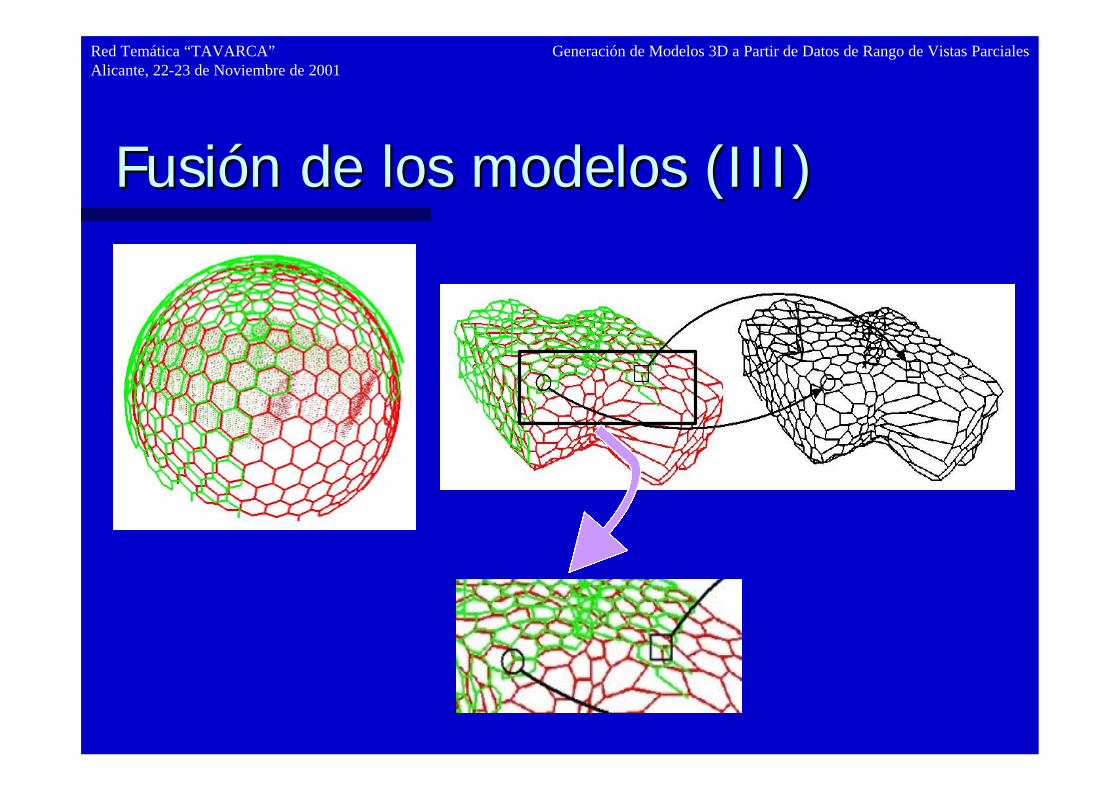
Fusión de los modelos (I)Fusión de los modelos (I)nn Entre las distintas vistas parciales aparecen Entre las distintas vistas parciales aparecen
siempre zonas de superposición.siempre zonas de superposición.nn Los datos de rango de cada vista parcial, al Los datos de rango de cada vista parcial, al
haber sido rotados, han sido modelados con haber sido rotados, han sido modelados con la parte de esfera “que le corresponde”.la parte de esfera “que le corresponde”.
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Fusión de los modelos (II)Fusión de los modelos (II)
nn Si tenemos Si tenemos nn vistas parciales, su fusivistas parciales, su fusióón, n, que denotaremos como Tque denotaremos como T’’∪∪, se define , se define como:como:
'...'''' 211
n
n
ii TTTTT UUU ==
=
∪
Si un nodo Si un nodo NN ha sido usado en ha sido usado en kk vistas vistas parciales, su posiciparciales, su posicióón final sern final seráá el valor el valor medio para esas medio para esas kk vistas parciales.vistas parciales.
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Fusión de los modelos (III)Fusión de los modelos (III)
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
FusiFusióón de los modelos (n de los modelos (IIV)V)
nn Cierre del modeloCierre del modelo::nn SSi no se ha podido adquirir toda la superficie del i no se ha podido adquirir toda la superficie del
objeto, es necesario cerrar el modelo.objeto, es necesario cerrar el modelo.nn Supondremos que el objeto está sobre una mesa Supondremos que el objeto está sobre una mesa
giratoria, y por tanto la zona no visible se giratoria, y por tanto la zona no visible se corresponde con la base del objeto.corresponde con la base del objeto.
nn En caso de que nuestro sistema permitiese realizar En caso de que nuestro sistema permitiese realizar una adquisición completa del objeto, esta fase no una adquisición completa del objeto, esta fase no sería necesaria.sería necesaria.
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
FusiFusióón de los modelos (V)n de los modelos (V)
nn Formalmente, el cierre del modelo Formalmente, el cierre del modelo consiste en la aproximación de la parte consiste en la aproximación de la parte de malla no usada (de malla no usada (TTff) obteniendo T’) obteniendo T’ff y, y, finalmente, realizar la integración de T’finalmente, realizar la integración de T’∪∪
y Ty T’’ff para obtener el modelo completo para obtener el modelo completo del objeto Tdel objeto T’’..
U fTTT ''' ∪=
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
FusiFusióón de los modelos (VI)n de los modelos (VI)
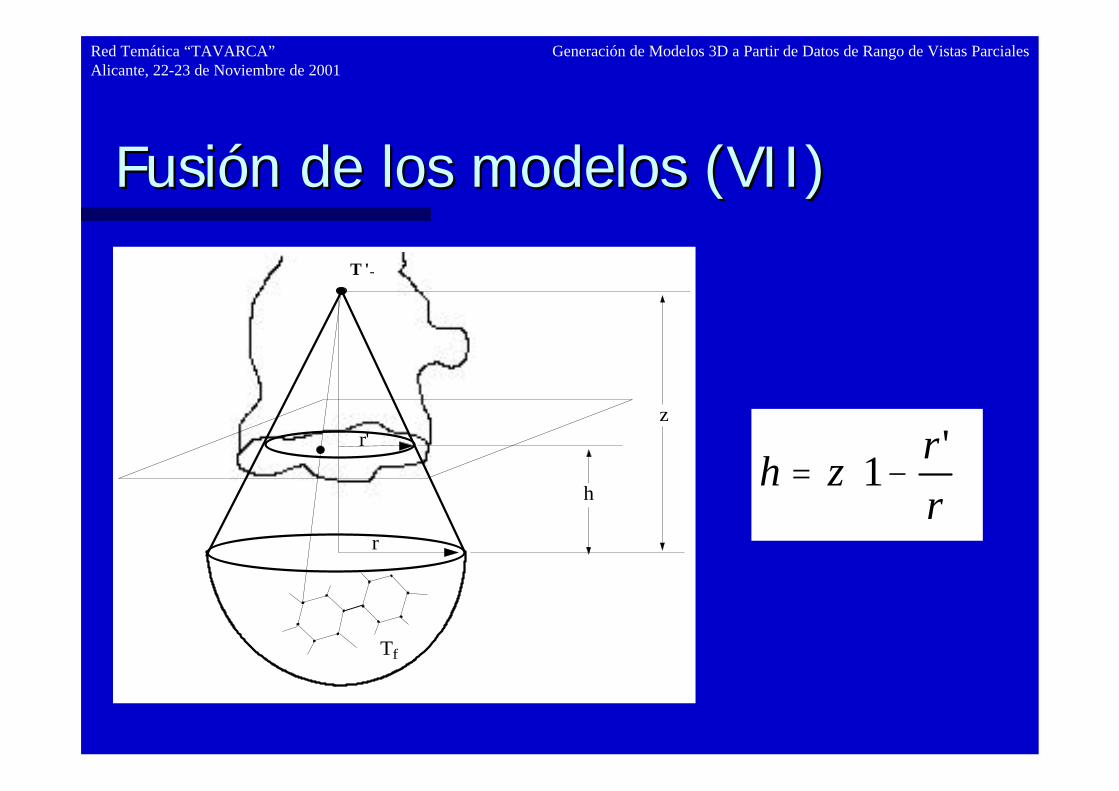
nn Algoritmo:Algoritmo:1.1. ObtenciObtencióón de n de TTff..2.2. ObtenciObtencióón de la frontera de Tn de la frontera de T’’∪∪, que se , que se
denotardenotaráá como b(Tcomo b(T’’∪∪).).3.3. DeformaciDeformacióón de n de TTff, obteniendo T, obteniendo T’’ff, con la , con la
condicicondicióón de que Tn de que T’’f f debe estar dentro de debe estar dentro de b(Tb(T’’∪∪).).
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
FusiFusióón de los modelos (VII)n de los modelos (VII)
r'
r
h
z
Tf
T '∪∪
−=
r
rzh
'1
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
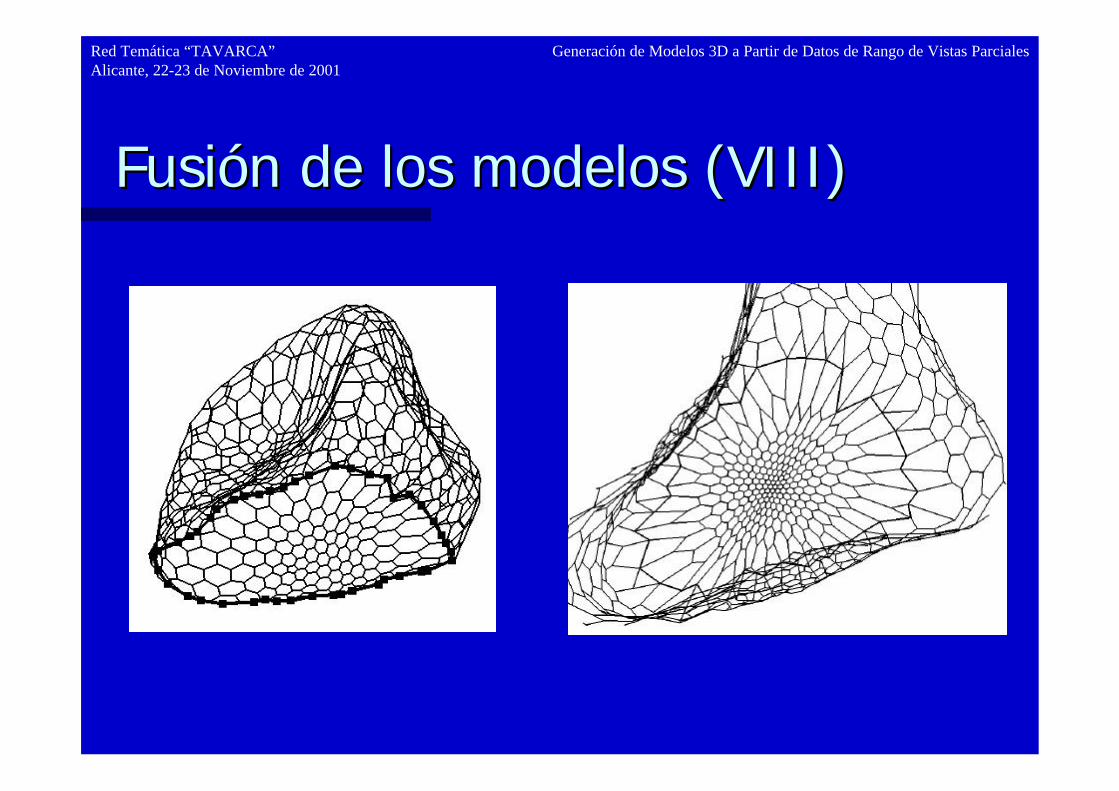
FusiFusióón de los modelos (n de los modelos (VIIVIII)I)

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Fusión de los modelos (IFusión de los modelos (IXX))
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Regularización (I)Regularización (I)
nn El proceso realizado hasta ahora parte de un El proceso realizado hasta ahora parte de un hipótesis que es, en principio, arbitraria: Se hipótesis que es, en principio, arbitraria: Se utiliza la mitad de la esfera para todas las utiliza la mitad de la esfera para todas las vistas parciales.vistas parciales.
nn Se propone una redefinición de los centros Se propone una redefinición de los centros asociados a cada vista, lo que hará que las asociados a cada vista, lo que hará que las porciones de esfera usadas para el modelado porciones de esfera usadas para el modelado parcial se adapten a cada un de las vistas del parcial se adapten a cada un de las vistas del objeto.objeto.

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
RegularizaciRegularizacióón (II)n (II)
nn Notación y definiciones:Notación y definiciones:nn Para la iteración Para la iteración kk, el valor medio de la distancia entre , el valor medio de la distancia entre
nodos para la vista parcial nodos para la vista parcial ii, se denotará como L, se denotará como Lii(k). (k). Para el modelo completo L(k).Para el modelo completo L(k).
nn A partir del error se define la condición de FIN A partir del error se define la condición de FIN como:como:
( )( )
ε≤kL
kei
( ) ( ) ( ) 1n1,2,...,i +=−= kLkLke ii
nn Para cada vista parcial Para cada vista parcial ii, en la iteración , en la iteración kk,, definimosdefinimosel siguiente parámetro de error:el siguiente parámetro de error:
Se considera a T’Se considera a T’ff como la vista parcial n+1.como la vista parcial n+1.

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
RegularizaciRegularizacióón (III)n (III)
nn Idea bIdea báásica para la regularizacisica para la regularizacióón:n:Supongamos que Supongamos que eeii(k(k--1) > 0, entonces L1) > 0, entonces Lii(k(k--1) > L(k1) > L(k--1). 1). En la prEn la prááctica, esto quiere decir que la malla Tctica, esto quiere decir que la malla Tii en la en la iteraciiteracióón n kk--11 es es ““pequepequeññaa”” con respecto al resto de con respecto al resto de mallas parciales en esa misma iteracimallas parciales en esa misma iteracióón. Debido a esto, n. Debido a esto, en la pren la próóxima iteracixima iteracióón el nn el núúmero de nodos asociado a mero de nodos asociado a esta malla deberesta malla deberáá aumentar. Viceversa si aumentar. Viceversa si eeii(k(k--1)<0.1)<0.La modificaciLa modificacióón del nn del núúmero de nodos se realizarmero de nodos se realizaráámoviendo en la direccimoviendo en la direccióón del eje de visin del eje de visióón el plano de n el plano de corte (equivalentemente el corte (equivalentemente el ““centrocentro”” OOii del objeto)del objeto)
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
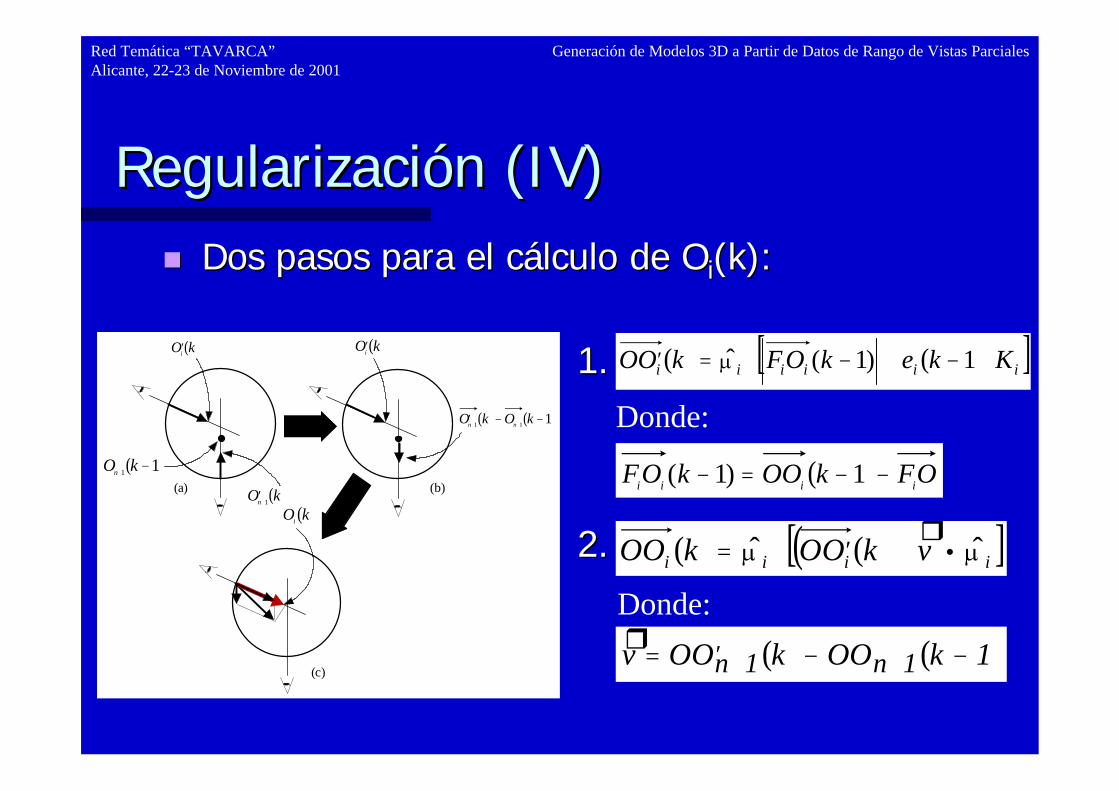
RegularizaciRegularizacióón (IV)n (IV)nn Dos pasos para el cálculo de Dos pasos para el cálculo de OOii(k):(k):
( )kOi′
( ) ( )111 −−′++
kOkO nn
( )11 −+
kOn
( )kOn 1+′
( )kOi′
( )kOi
(a) (b)
(c)
Donde:
( ) OFkOOkOF iiii −−=− 1)1(
( ) ( )[ ]iiiiii KkekOFkOO ⋅−+−⋅=′ 1)1(µ̂1.1.
2.2. ( ) ( )( )[ ]iiii vkOOkOO µµ ˆˆ •+′⋅=r
Donde:
( ) ( )1kOOkOOv 1n1n −−′= ++r
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
RegularizaciRegularizacióón (V)n (V)nn Algoritmo de generación del modelo completo:Algoritmo de generación del modelo completo:
1.1. Cálculo de Cálculo de OOii, i=1, ..., n. , i=1, ..., n. OOii viene definido por el punto de viene definido por el punto de corte del eje de visión con el plano de corte corte del eje de visión con el plano de corte ΠΠ ii..
2.2. NormalizaciNormalizacióón de los datos de rango con respecto a O, n de los datos de rango con respecto a O, donde el O es el valor medio de los donde el O es el valor medio de los OOii, i=1, ..., n. , i=1, ..., n. Obtenemos SObtenemos Sii..
3.3. ObtenciObtencióón de Tn de T1/2 1/2 (T(Tii).).4.4. Aproximación de TAproximación de Tii a Sa Sii. Obtenemos . Obtenemos T’T’ii..5.5. Fusión de los Fusión de los T’T’ii..6.6. Cierre del modelo. Obtención de T’.Cierre del modelo. Obtención de T’.7.7. Cálculo del valor medio de las longitudes entre los nodos de Cálculo del valor medio de las longitudes entre los nodos de
los distintos los distintos T’T’ii y T’. Obtención de Ly T’. Obtención de Lii y L.y L.8.8. Verificación de la condición de FIN. Si FIN=TRUE entonces Verificación de la condición de FIN. Si FIN=TRUE entonces
fin del algoritmo.fin del algoritmo.9.9. Caso contrario, recalcular los valores de Caso contrario, recalcular los valores de OOii e ir a 2.e ir a 2.
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
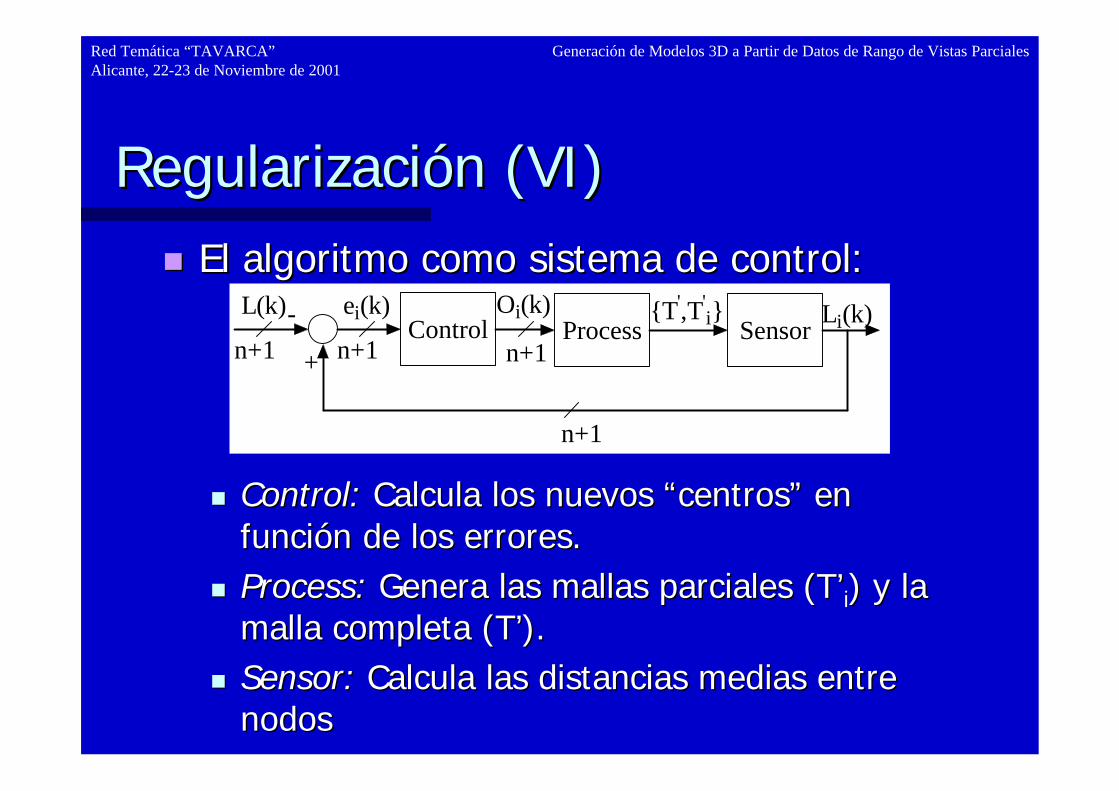
RegularizaciRegularizacióón (VI)n (VI)nn El algoritmo como sistema de control:El algoritmo como sistema de control:
Control Process Sensor-
+n+1
L(k) ei(k)
n+1
Oi(k)
n+1
{T',T'i} Li(k)
n+1
nn Control:Control: Calcula los nuevos “centros” en Calcula los nuevos “centros” en función de los errores.función de los errores.
nn ProcessProcess: : Genera las mallas parciales (Genera las mallas parciales (T’T’ii) y la ) y la malla completa (T’).malla completa (T’).
nn SensorSensor: : Calcula las distancias medias entre Calcula las distancias medias entre nodosnodos
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
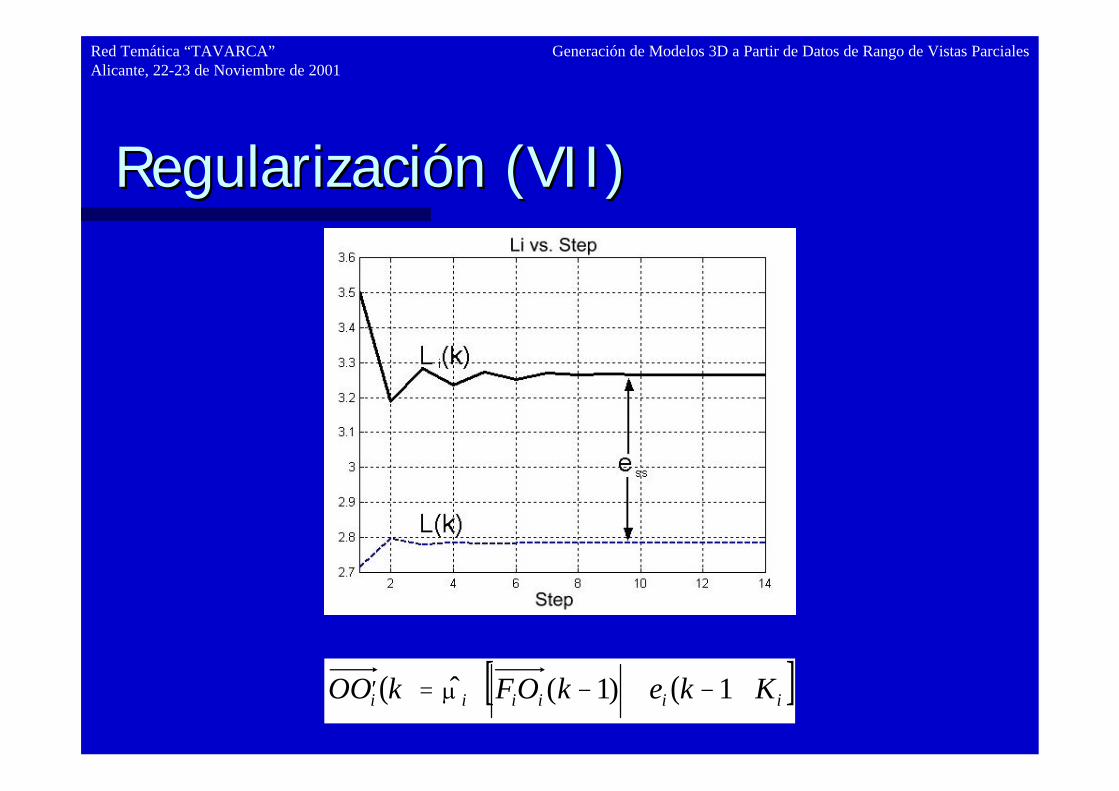
RegularizaciRegularizacióón (VII)n (VII)
( ) ( )[ ]iiiiii KkekOFkOO ⋅−+−⋅=′ 1)1(µ̂

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
RegularizaciRegularizacióón (VIII)n (VIII)
( ) ( )
⋅⋅+⋅=′ ∫
k
iiiiii dkkeKOFkOO0
µ̂

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
RegularizaciRegularizacióón (n (IXIX))nn Función de densidad en varias iteraciones:Función de densidad en varias iteraciones:

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
RegularizaciRegularizacióón (n (XX))nn Evolución del numero de nodos y error Evolución del numero de nodos y error
para todas las vistas parciales.para todas las vistas parciales.

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
RegularizaciRegularizacióón (n (XXI)I)
nn Modelo en primera y última iteraciónModelo en primera y última iteración
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Conclusiones (I)Conclusiones (I)
nn Se ha presentado un método para la Se ha presentado un método para la generación de un modelo esférico generación de un modelo esférico regular a partir de los datos de rango regular a partir de los datos de rango de las distintas vistas parciales.de las distintas vistas parciales.
nn El modelo completo se ha sintetizado El modelo completo se ha sintetizado mediante la iteración de tres mediante la iteración de tres subprocesos: construcción de los subprocesos: construcción de los modelos parciales, fusión de los modelos parciales, fusión de los modelos y redefinición de las mallas modelos y redefinición de las mallas parcialesparciales
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Conclusiones (II)Conclusiones (II)
nn Con respecto a la generación de Con respecto a la generación de modelos parciales se ha presentado un modelos parciales se ha presentado un método basado en la ruptura de las método basado en la ruptura de las esfera en función de las coordenadas esfera en función de las coordenadas del “centro de gravedad” de la vista del “centro de gravedad” de la vista parcial. También se ha mostrado parcial. También se ha mostrado cuando un nodo puede o no puede cuando un nodo puede o no puede pertenecer a la semiesfera de modelado pertenecer a la semiesfera de modelado (T(Tii).).
Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Conclusiones (III)Conclusiones (III)
nn La fusión de los distintos modelos parciales se La fusión de los distintos modelos parciales se ha soluciona de forma sencilla debido a la ha soluciona de forma sencilla debido a la superposición de las vistas y a la propia superposición de las vistas y a la propia estructura de la malla esférica.estructura de la malla esférica.
nn También se ha presentado un método para el También se ha presentado un método para el cierre del modelo por su base mediante la cierre del modelo por su base mediante la proyección de los nodos no utilizados en el proyección de los nodos no utilizados en el modelado de las vistas parciales sobre el modelado de las vistas parciales sobre el plano que define a esa base.plano que define a esa base.

Red Temática “TAVARCA”Alicante, 22-23 de Noviembre de 2001
Generación de Modelos 3D a Partir de Datos de Rango de Vistas Parciales
Conclusiones (IV)Conclusiones (IV)
nn Por último, se ha mostrado como realizar una Por último, se ha mostrado como realizar una regularización del modelo mediante la regularización del modelo mediante la redefinición de la semiesfera usada en el redefinición de la semiesfera usada en el modelo de cada vista parcial.modelo de cada vista parcial.
nn En esta redefinición se ha seguido la En esta redefinición se ha seguido la estructura de un sistema de control estructura de un sistema de control realimentado, y se ha optimizado su realimentado, y se ha optimizado su funcionamiento mediante la utilización de un funcionamiento mediante la utilización de un controlador de tipo I.controlador de tipo I.

Generación Generación dde Modelos e Modelos 3D3Da Partir a Partir dde Datos e Datos dde Rango e Rango
dde Vistas Parciales.e Vistas Parciales.
Santiago SalamancaSantiago Salamanca MiñoMiñoEscuela de Ingenierías IndustrialesEscuela de Ingenierías Industriales
Universidad de ExtremaduraUniversidad de Extremadura(UNED, UCLM, UEX)(UNED, UCLM, UEX)