Fundamentos de Radar
41
FUNDAMENTOS RADAR RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS 1 FUNDAMENTOS DE RADAR INTRODUCCIÓN En el campo de las Telecomunicaciones y ayudas a la Navegación aérea empleadas para el Control del Tránsito Aéreo, el radar es reconocido, para el ATC, como la radioayuda por excelencia, algo así como la reina de las radioayudas considerándose en algunos casos tan esencial como la propia radio. Su importancia radica en que sin el radar no se podría manejar la densidad de tráfico aéreo que conocemos en nuestros días. Ningún otro sistema, a excepción de la propia radio, ha contribuido tanto al desarrollo de la Aviación. Para el Controlador, el radar es una herramienta que le permite un cambio cualitativo en el manejo del tránsito que esta bajo su responsabilidad. Con su ayuda se contribuye de una mejor manera al logro de la finalidad de los Servicios de Tránsito Aéreo que se describen en el Anexo 11 de la OACI y que son: Prevenir colisiones en el aire de aeronaves en general. Lograr la afluencia expedita y ordenada del tránsito aéreo. Dar consejo e información necesaria a las aeronaves para que puedan volar eficazmente con seguridad. Por la relevancia del radar como instrumento de trabajo para el controlador, es sumamente importante que éste se familiarice con los conceptos fundamentales que están implicados en el desarrollo de un sistema de radar. En este curso se busca presentar estos conceptos siempre bajo el punto de vista operativo del control del Tránsito Aéreo. Todos los aspectos técnicos que se toque buscarán mostrar las implicaciones que estos tienen en la calidad de información presentada en las pantallas de radar que es el producto final con el cual el Controlador Radar desarrolla su trabajo. FUNDAMENTOS GENERALES DE UN SISTEMA DE RADAR. Definición General Una estación de RADAR tiene el propósito de detectar un blanco distante (avión, barco u otro objeto) y determinar la distancia, la dirección acimutal (dirección con referencia al norte geográfico) y elevación con respecto al punto de observación. La palabra RADAR tiene su origen en la contracción de Radio Detection And Ranging, expresión que define un sistema que logra DETECTAR objetos de interés mediante el empleo de energía electromagnética viajando a la velocidad de la luz. El sistema tiene además la capacidad de ubicar el blanco detectado en una dirección y una distancia con respecto a la estación en que están emplazados los equipos de transmisión y recepción de las ondas interrogadoras. La palabra RADIO define entonces; la obligatoriedad de emplear ondas electromagnéticas, DETECTION; el hecho de detectar y RANGING la capacidad de dar una ubicación en dirección y distancia. El Radar Básico Durante la segunda guerra mundial, los estudios acerca de la forma en que se pudieran detectar el tránsito de aeronaves enemigas y el poder distinguir a las amigas; llevo a que los Ingleses pusieran toda su
-
Upload
wilbert-chavez-irazabal -
Category
Documents
-
view
23 -
download
1
Transcript of Fundamentos de Radar

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
1
FUNDAMENTOS DE RADAR INTRODUCCIÓN
En el campo de las Telecomunicaciones y ayudas a la Navegación aérea empleadas para el Control del Tránsito Aéreo, el radar es reconocido, para el ATC, como la radioayuda por excelencia, algo así como la reina de las radioayudas considerándose en algunos casos tan esencial como la propia radio.
Su importancia radica en que sin el radar no se podría manejar la densidad de tráfico aéreo que conocemos en nuestros días. Ningún otro sistema, a excepción de la propia radio, ha contribuido tanto al desarrollo de la Aviación.
Para el Controlador, el radar es una herramienta que le permite un cambio cualitativo en el manejo del tránsito que esta bajo su responsabilidad. Con su ayuda se contribuye de una mejor manera al logro de la finalidad de los Servicios de Tránsito Aéreo que se describen en el Anexo 11 de la OACI y que son:
Prevenir colisiones en el aire de aeronaves en general.
Lograr la afluencia expedita y ordenada del tránsito aéreo.
Dar consejo e información necesaria a las aeronaves para que puedan volar eficazmente con seguridad.
Por la relevancia del radar como instrumento de trabajo para el controlador, es sumamente
importante que éste se familiarice con los conceptos fundamentales que están implicados en el desarrollo de un sistema de radar. En este curso se busca presentar estos conceptos siempre bajo el punto de vista operativo del control del Tránsito Aéreo. Todos los aspectos técnicos que se toque buscarán mostrar las implicaciones que estos tienen en la calidad de información presentada en las pantallas de radar que es el producto final con el cual el Controlador Radar desarrolla su trabajo.
FUNDAMENTOS GENERALES DE UN SISTEMA DE RADAR. Definición General
Una estación de RADAR tiene el propósito de detectar un blanco distante (avión, barco u otro objeto) y determinar la distancia, la dirección acimutal (dirección con referencia al norte geográfico) y elevación con respecto al punto de observación.
La palabra RADAR tiene su origen en la contracción de Radio Detection And Ranging, expresión que define un sistema que logra DETECTAR objetos de interés mediante el empleo de energía electromagnética viajando a la velocidad de la luz. El sistema tiene además la capacidad de ubicar el blanco detectado en una dirección y una distancia con respecto a la estación en que están emplazados los equipos de transmisión y recepción de las ondas interrogadoras. La palabra RADIO define entonces; la obligatoriedad de emplear ondas electromagnéticas, DETECTION; el hecho de detectar y RANGING la capacidad de dar una ubicación en dirección y distancia. El Radar Básico
Durante la segunda guerra mundial, los estudios acerca de la forma en que se pudieran detectar el tránsito de aeronaves enemigas y el poder distinguir a las amigas; llevo a que los Ingleses pusieran toda su

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
2
ciencia y técnica en servicio de mejorar la construcción de un sofisticado instrumento electrónico que se conocía con el nombre de RADAR, arma de vital importancia en la defensa Inglesa contra los Alemanes.
Después de la segunda guerra mundial, el radar continuó su desarrollo en pro de objetivos frecuentemente asociados con el transporte. Su empleo en el control del tránsito marino y aéreo avanzó con pasos agigantados.
Para el caso del transporte
aéreo, se continuó con el estudio y desarrollo de sistemas de radar fundamentados en la técnica de PULSOS; los transmisores de radar emiten pulsos de energía electromagnética con muy alta potencia. Estos pulsos, que viajan a la velocidad de la luz, recorren el espacio en un haz altamente direccional, golpeando y generando un eco en toda aeronave, nube, montaña o bandada de pájaros que encuentre en su camino. Los ecos de respuesta, que de igual manera se desplazan a la velocidad de la luz, regresan a la antena de donde salió el pulso de interrogación, para ser tratada y presentada en una pantalla panorámica que muestra al controlador la presencia y ubicación precisa de la aeronave detectada.
En forma elemental el funcionamiento del radar se puede ilustrar de la siguiente manera: El
transmisor de radar envía una onda electromagnética en una dirección determinada, a través de una antena directiva. Si hay un blanco reflector, el receptor detecta un “eco” u onda que devuelve. Para ello es ideal que sea conductor, lo que ocurre con los aviones debido a sus muchas partes metálicas. Tipos de radares en el Control Aéreo
En los sistemas de radar utilizados para el control de tránsito aéreo, se implementan dos clases de radares que son conocidos con los nombres de:
Radar Primario PSR y Radar Secundario SSR.
Radar Primario (PSR) Primary Surveillance Radar
Con este nombre se identifican los equipos de radar clásicos que detectan las aeronaves mediante la utilización de pulsos de energía electromagnética que al golpear a las aeronaves generan un eco de respuesta hacia la estación sensora.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
3
Para los equipos de radar primario el BLANCO (aeronave) es un objeto pasivo, pues, no efectúa
ninguna participación en el eco de respuesta más que la de presentar una superficie de reflexión.
La información de RADAR PRIMARIO presenta para el controlador radar la desventaja de no permitirle una identificación inmediata de la aeronave en contacto radar. Para que el controlador pueda tener la certeza de cuál es la aeronave detectada, debe obligar a ésta a realizar maniobras en la aerovía.
La utilización de estos equipos en el control ATC se recomienda por la precisión de ubicación en la distancia y el acimut del blanco, y además, para garantizar el contacto radar a las aeronaves que no estén equipadas con RESPONDEDOR o que lo tengan averiado. Radar Secundario (SSR) Secondary Surveillance Radar
El aumento del número de aeronaves bajo la responsabilidad de los centros de control de radar y las altas velocidades con que éstas se desplazan obligo al desarrollo de nuevas tecnologías en los equipos de radar empleados para el control de tránsito aéreo.
El objetivo principal del RADAR SSR es permitir una inmediata identificación de la aeronave en contacto radar. Con tal motivo se desarrolló la técnica fundamentada en un dialogo entre los equipos de la estación y un equipo especializado a bordo de la aeronave, denominado RESPONDEDOR.
El tener un dialogo, codificado, entre la estación de RADAR SSR y el TRANSPONDER en cada
aeronave permite preguntar, además de la identificación, la altura de vuelo de la aeronave.
Esté tipo de radar está en capacidad de poder recibir directamente de la aeronave mensajes de emergencia, fallas de comunicaciones o interferencia ilícita. Por último otra gran ventaja está en que la aeronave puede, a solicitud del controlador, accionar por un breve período de tiempo un pulso especial de identificación SPI. La Técnica de Impulsos Los sistemas de radar funcionan según dos técnicas como son:
La técnica de impulsos
La técnica de onda continua
La técnica de impulsos es la usada en los sistemas de radar implementados con fines de Control de Tránsito Aéreo (primario y secundario).
Esta técnica implica la transmisión de energía en descargas muy breves. Cada descarga consiste de un impulso de radiofrecuencia con unos microsegundos de duración y con una potencia adecuada al propósito de detección.
La duración o tamaño del impulso se llama ANCHURA DEL IMPULSO o DURACIÓN DEL IMPULSO. Aunque la anchura es muy breve el pulso contiene muchos ciclos de radiofrecuencia. Por ejemplo, si se trata de un transmisor de radar primario para el control de tránsito aéreo en la aproximación TMA, que trabaja en la frecuencia de 2700 Mhz (Banda S) y con un ancho de pulso de 1 microsegundo, la cantidad de ciclos de la frecuencia portadora incluidos en cada impulso transmitido puede calcularse como sigue:

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
4
Número de ciclos producidos en un segundo = 2.700‘000 000
Número de ciclos producidos en un microsegundo = 2.700
Entonces cada descarga o salva contiene 2.700 ciclos completos de la onda portadora del radar.
CARACTERISTICA DE LOS PULSOS DE RESPUESTA AL SSR
Frecuencias del Radar
La frecuencia de los pulsos de ondas electromagnéticas empleadas en los radares debe ser muy alta. Lo elevado de las frecuencias y la dificultad de su manejo es el factor que más retrasó el desarrollo del radar, sobre todo en sus comienzos.
El RADAR logra la detección de un BLANCO mediante la utilización de pulsos de energía ELECTROMAGNÉTICA en la banda de UHF (300 MHZ - 3000 MHZ).
Las frecuencias utilizadas en radar para el control del tránsito aéreo están normalizadas según una clasificación militar en “bandas”, que son:
Banda L 1000 a 2000 Mhz= 1 a 2 Ghz Banda S 2000 a 4000 Mhz= 2 a 4 Ghz
Existen otras bandas superiores a esta s como son la C, X, K pero los radares actuales para ATC se ubican en la banda L o S. La elección de las frecuencias más altas obedece a las siguientes razones :
Están libres del ruido exterior y de la dispersión ionosférica.
El radar que emplea la técnica de los haces funciona de modo más eficaz con haces más estrechos. Por su parte, éstos se consiguen mejor en las longitudes de onda más cortas.
De modo similar, los impulsos más cortos son también consecuencia de las longitudes de
onda menores.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
5
La eficacia de la reflexión producida por un objeto depende del tamaño de éste respecto a la
longitud de onda. Cuanto más corta sea ésta más eficazmente se reflejarán las señales en los objetos.
Ancho y Potencia del Pulso de Interrogación
El tiempo de duración del pulso de interrogación es un criterio que compromete dos aspectos fundamentales como son: LA CANTIDAD DE POTENCIA EMITIDA y EL PODER DE DISCRIMINACIÓN EN EL EJE, que se tratará más adelante.
Los estudios desarrollados en el campo de radiación de radar primario han determinado que un ancho de pulso de 3 microsegundos es ideal para los radares de ruta. Para los radares de aproximación se ha encontrado ideal un ancho de pulso de 1 microsegundo.
En los equipos de radar primario, para el cubrimiento de 200 Millas Náuticas con un pulso de 3 microsegundos de duración, se irradia el pulso con una potencia interna de 2 Megawatios (dos millones de watios pico). En el cubrimiento de 60 Millas Náuticas con un pulso de 1 microsegundo de duración, se irradia el pulso con una potencia interna de 650 Kilowatios (seiscientos cincuenta mil watios pico).
El ancho del pulso tiene su principal implicación en el poder de discriminación o poder separador en el eje. Poder de discriminación en el eje
La duración del pulso de interrogación en un equipo de radar tiene dos implicaciones para la recepción de los ecos de respuesta de las aeronaves detectadas y son:
En primer lugar, durante el tiempo de emisión de los pulsos de interrogación los equipos receptores son bloqueados para evitar que reciban las altas potencia de éstos, de lo contrario sufrirían daños mayores. Esto hace entonces que las respuestas de las aeronaves próximas a la estación sensora no puedan ser tratadas y presentadas en pantalla. Alrededor de la estación existe entonces un cono de silencio cuyo radio se puede calcular por la fórmula: S = 300.000 K/Seg * T Donde T es el tiempo de duración del pulso de interrogación dado en microsegundos.
En segundo lugar, la posibilidad de que las respuestas de dos aeronaves que vuelan en el mismo radial se diferencien entre si al presentarse en pantalla, está garantizada siempre y cuando se cumpla la condición de encontrasen separadas una distancia mayor a la calculada en la fórmula ya presentada. A esta separación mínima entre dos aeronaves para ser diferenciadas en pantalla se le denomina PODER DISCRIMINADOR EN EL EJE.
En la práctica EL PODER DISCRIMINADOR EN EL EJE determina que el controlador vea como un solo objeto la información correspondiente a dos aeronaves diferentes que se encuentren a una distancia menor de la ya calculada. Determinación del tiempo en Radar

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
6
Los tiempos que se manejan en las operaciones de los equipos de radar son extremadamente pequeños, teniendo en cuenta que las ondas de radio tienen una velocidad de propagación de 300.000 Km/seg el RADAR puede medir estos intervalos de tiempo tan pequeños con una gran exactitud. Los tiempos se miden en microsegundos y en milisegundos.
El RADAR determina la distancia a que se encuentra un objeto midiendo el intervalo de tiempo transcurrido entre la emisión de un impulso y la recepción de su eco. Esta medida se lleva a cabo electrónicamente y conociendo la velocidad de las ondas electromagnéticas puede resolverse la formula de distancia = velocidad x tiempo. Hay que tener en cuenta que la distancia hallada con esta formula es la considerada en un solo sentido, pero como el impulso ha realizado el viaje de ida y vuelta, la distancia real será la mitad de la medida, o sea Distancia = (velocidad x tiempo)/2 La distancia a la que es capaz de detectar un sistema de radar depende de factores como:
La curvatura de la tierra. la presencia de montañas que se interpongan entre la trayectoria de el pulso y la aeronave. La potencia en los pulsos de detección.
Medida de la distancia
La forma como un equipo de radar logra determinar la distancia a que se encuentra el BLANCO del cual se recibe el eco de respuesta es relativamente sencilla.
Hemos dicho que el RADAR es un sistema de detección que utiliza pulsos de energía electromagnética lo cual significa que los pulsos irradiados por el RADAR viajan a la velocidad de la luz que es de 300.000 Km/Seg. Basta entonces medir el tiempo entre la salida del pulso de interrogación y el regreso del ECO y efectuar un cálculo sencillo para conocer la distancia exacta en que se encuentra el BLANCO. - Conocemos el tiempo transcurrido entre la ida y vuelta; T. - Conocemos la velocidad con que se desplaza el pulso; c, 300.000 Km/seg.
La distancia a la que se encuentra el blanco está dada por la ecuación: S = T x 300.000 Km/seg * 2 NOTA: La división por 2 es necesaria pues el tiempo medido por el radar es el de ida y regreso del pulso.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
7
Frecuencia de repetición de pulsos. Alcance máximo de un Radar
Una estación de radar siempre está ajustada para detectar los blancos en un radio de acción determinado. La distancia hasta la cual se desea hacer detección es un dato importante para determinar que tiempo mínimo se debe tener entre la emisión de un pulso de interrogación y el pulso siguiente considerando que los equipos de radar deben dar el tiempo suficiente para que la energía electromagnética viaje y regrese en todo el radio de cubrimiento.
Para ilustrar el concepto de ALCANCE MÁXIMO DE UN RADAR tomemos el caso de los radares de 200 millas náuticas empleados en el control de ruta: Tenemos que la frontera hasta la que se quiere detectar tránsito es de 200 Millas Náuticas (una milla náutica tiene 1.84 Km). Un pulso de energía electromagnética recorre una Milla Náutica en 6.18 microsegundos, o sea, emplea un tiempo de 12.36 microsegundos en ida y regreso por cada milla recorrida lo que significa entonces que para hacer el recorrido de ida y vuelta hasta las 200 MN empleará 2.472 microsegundos. La estación de radar en este caso debe guardar una separación mínima de 2,472 mseg entre pulso y pulso de interrogación. Al tiempo mínimo existente entre pulso y pulso se le denomina PERÍODO DE REPETICIÓN DE PULSOS (PRP).
La iniciación de cada pulso de interrogación se hace obedeciendo a una orden maestra del sistema denominada SINCRO (SYN). El sincro es una señal fundamental en la operación de la totalidad del sistema; desde transmisores hasta presentación en pantallas.
El PERÍODO DE REPETICIÓN DE PULSOS define el número de pulsos de interrogación que por segundo pueden ser enviados por la estación. Este parámetro es conocido como FRECUENCIA DE REPETICIÓN DE PULSOS.
LA FRECUENCIA DE REPETICIÓN DE PULSOS para el caso del radar de 200 MN de alcance que hemos tomado como ejemplo es de 400 pulsos/seg.
En los radares de ruta el PERÍODO DE REPETICIÓN DE PULSOS es de unos 3000
microsegundos, lo que significa una FRECUENCIA DE REPETICIÓN DE PULSOS de 333 Hz. El

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
8
aumentar el tiempo entre pulsos es un compromiso con los tiempos necesarios para el tratamiento de información.
La distancia en tiempo entre dos impulsos es denominada PERÍODO DE RECURRENCIA DE IMPULSOS (PRP), mientras que la cantidad de impulsos transmitidos en un segundo se llama FRECUENCIA DE REPETICIÓN DE PULSOS (PRF). Determinación de la dirección
El radar de pulsos empleado en los servicios ATS utiliza la transmisión de impulsos concentrados en un haz muy estrecho. Dicho haz tiene que mantenerse lo más fino posible si se quiere obtener una discriminación exacta. Los haces finos pueden producirse acortando la longitud de onda o aumentando el tamaño de la antena. Mediante técnicas de vanguardia puede ajustarse electrónicamente una antena para que produzca un haz de la anchura necesaria. A su vez, este haz puede hacerse que explore en acimut o elevación, siempre partiendo de un punto determinado. La dirección en que se encuentra el objeto es en ese caso la del haz cuyo eco se recibe, la cual se lee en una escala calibrada partiendo del punto de referencia. Determinación rumbo acimutal del blanco
Una vez que los equipos de radar han determinado, mediante la medición del tiempo de viaje del pulso de interrogación, la distancia a la cual se encuentra el blanco, es necesario determinar en que acimut (ángulo respecto al norte geográfico) está ubicado. Para determinar dicho ángulo de posición se implementa un dispositivo especializado conocido con el nombre de codificador de antena.
El codificador consiste en un disco óptico que gira sincronizadamente con las antenas de radar,
generando 4096 pulsos equidistantes por cada vuelta de antena y un pulso de amplitud mayor al pasar el juego de antenas por el norte geográfico.
Los 4096 pulsos por vuelta se denominan INCREMENTOS DE ACIMUT y el pulso de amplitud mayor SEÑAL NORTE. Estos datos son utilizados por los equipos de procesamiento de información de información radar para determinar la dirección azimutal de los ecos de respuesta. Cálculo de la altura del blanco detectado
La posibilidad de que un radar primario (PSR), equipo cuya característica fundamental está en que la respuesta del blanco es pasiva, pueda determinar la altitud del objeto detectado obliga a utilizar, en giro sincronizado con la antena de radiación acimutal, una antena de radiación con movimiento de cabeceo para garantizar el cálculo del ángulo de cenit.
En los equipos de radar secundario (SSR), aprovechando la respuesta activa del blanco tipo aeronave, el dato de altura viene codificado con la información del altímetro a bordo.
EL RADAR PRIMARIO DE VIGILANCIA (PSR) Primary Surveillance Radar
Es el radar original, y utiliza el principio de la técnica de impulsos para determinar la distancia y la dirección en que se encuentra un objeto. Un emisor, que funciona según el principio del eco y la exploración, transmite un tren de impulsos en un haz, bien en una dirección fija, bien de un modo omnidireccional, mediante una exploración giratoria en acimut (Radar de vigilancia). El haz también puede explorar en elevación, de acuerdo con los objetivos perseguidos por el equipo. Todos los objetos

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
9
que se encuentren en la trayectoria de los impulsos y sean conmensurables con su longitud de onda, reflejarán y dispersarán la energía por ellos transportada.
Parte de esta energía reflejada volverá al receptor, aunque muy debilitada. La intensidad de estos
ecos depende de muchos factores, entre los que se encuentran:
Potencia del transmisor Distancia del objeto reflector Forma material y altitud de ese objeto Tamaño del objeto respecto a la longitud de onda
Esta energía reflejada se tratará en el receptor y a continuación se aplicará al indicador de una
manera adecuada para conseguir la información.
FUNDAMENTOS TÉCNICOS DEL RADAR PRIMARIO
Ya hemos definido el concepto de radar primario, y que son aplicables igualmente al radar secundario. Nos centraremos ahora en las particularidades de los equipos de radar primario, como:
Medida de distancia Alcance mínimo de un radar Frecuencia de repetición de pulsos y Determinación de la ubicación azimutal del blanco.
MEDIDA DE DISTANCIA
De los componentes principales del radar primario, el temporizador maestro o unidad de disparo
es el cerebro del equipo. Su función es la de emitir una serie de breves impulsos eléctricos en intervalos regulares. Estos impulsos se llevan al modulador y al mismo tiempo la unidad de base de tiempo queda avisada para empezar el cálculo de tiempo.
La tarea del modulador es la de proporcionar impulsos de anchura predeterminada. El contenido de muy alta tensión de estos impulsos mantienen el oscilador funcionando en la frecuencia del radar. Está dispuesto de manera que el principio de cada impulso dispare el oscilador y su final lo detenga. De ese modo, el modulador actúa como interruptor del oscilador, el cual a su vez genera impulsos de gran potencia y breve duración. La salida del oscilador se aplica a la antena.
En los sistemas de radar primario para el control del tránsito aéreo se emplea una sola antena que actúa de emisora y receptora. Un conmutador TR (transmisión-recepción) se encarga de aislar el receptor cuando se efectúa la transmisión y viceversa. Con esto, se pueden recibir los ecos en la antena y trasladarlos a la unidad receptora, la cual, tras su tratamiento adecuado, los lleva a la unidad de presentación, donde aparecen en una traza que empezó al iniciarse el funcionamiento, bajo las instrucciones del temporizador maestro.
ALCANCE DEL RADAR PRIMARIO El alcance depende de muchos factores de los cuales se pueden resaltar:
La potencia de transmisión: Se comprende que cualquier aumento de esa potencia se traducirá en un incremento del alcance. De todos modos, en el caso del radar la señal no sólo tiene que llegar al objetivo, sino que ha de recorrer otra distancia igual para volver al receptor con una intensidad suficiente

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
10
para permitir que pueda detectarse por encima del ruido interno del receptor. Por consiguiente, la razón Potencia/Alcance del radar primario se da en la expresión: Alcance máximo = Raíz cuarta de la potencia Esto quiere decir que para duplicar el alcance se requiere aumentar la potencia 16 veces.
Características del objeto reflector. El tamaño y la forma del objeto, el material de que está hecho y el aspecto de aquel son todos ellos factores que determinan la intensidad de los ecos recibidos. Un avión que refleje con su fuselaje dará un eco mejor que otro que refleje con el morro o la cola, acercándose o alejándose del radar. Además, un avión que se encuentre en una posición poco usual puede incluso influir el la polarización de las ondas, ocasionando en el receptor un desvanecimiento de la señal recibida.
Frecuencia de repetición de pulsos (PRF). El PRF es el que determina el alcance máximo del equipo. Cada impulso ha de tener tiempo para llegar al objeto reflector más distante previsto y volver, antes que salga el pulso siguiente. De lo contrario no podrá relacionarse cada eco con su impulso correspondiente.
Anchura del impulso. Esta anchura decide el alcance mínimo del equipo. Las ondas de radio recorren 300 mts en un microsegundo, por lo que, un impulso de 3 microseg (típico en un radar primario para control en ruta ACC) abarca un espacio de 900 mts en el espacio a lo largo de la línea de propagación. Si un objeto situado a 450 mts de la antena reflejase ese impulso, llegaría al receptor en el momento en que el impulso de salida todavía está saliendo del aparato. Cualquier Objeto situado a menos de 450 mts y que pueda reflejar el impulso, no será recibido, ya que el transmisor se encuentra emitiendo aún. Además, dos objetos alineados con el transmisor y separados por 450 mts o menos aparecerán como un solo eco sin ser posible distinguirlos. Este efecto es conocido como el PODER SEPARADOR EN EL EJE.
El efecto del poder separador en el eje obliga a emplear pulsos cortos para el funcionamiento de corto alcance consiguiéndose así resolución y exactitud (por ejemplo 1 microseg empleado en los radares primarios para la aproximación). Los impulsos más largos suelen utilizarse para trabajar a grandes distancias, ya que, además transportan más energía. e- La altura del avión. Las ondas de radar de las bandas de frecuencia que estamos tratando se desplazan en línea recta. Por ello, como consecuencia de la curvatura de la superficie terrestre, una parte considerable de ésta quedará en la sombra con independencia de la distancia a que se pueda llegar en altura.
La elevación de la cabeza de radar, es otro factor que interviene en la fórmula de la VHF.
Ecos de lluvia y nubes. En las longitudes de onda en que trabajan los sistemas de radar primario no se pueden despreciar la absorción y la dispersión que la radiación sufre en las gotas de agua de las nubes y precipitaciones. Los ecos debidos a las lluvias y otros fenómenos atmosféricos pueden emborronar las zonas exploradas. En la actualidad se dispone de varios dispositivos supresores, destinados a reducir el emborramiento debido a la lluvia, pero la mayoría de ellos funcionan a costa de la potencia o el alcance. Estorbos. Si no hay una línea de visión despejada entre el transmisor y el objeto que se trata de detectar, las señales de radar quedarán detenidas por el estorbo, lo que limitará el alcance eficaz en esa dirección particular.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
11
Hay otros factores, tales como la sensibilidad del receptor, la anchura de banda usada y la ganancia de la antena en el sentido de la propagación, que también afectan al alcance, pero éstos dependen sobre todo de consideraciones de diseño.
CLASIFICACIÓN DE RADAR PRIMARIO ATC.
Los equipos de radar primario implementados en el control del tránsito aéreo, pueden clasificarse de acuerdo a si están haciendo parte de un SISTEMA DE RADAR DE RUTA o de un SISTEMA DE RADAR DE APROXIMACION que tienen un cubrimiento de 200 Millas Náuticas y 60 Millas Náuticas, respectivamente.
En cuanto a las características físicas de los equipos tenemos diferencias en los tamaños de estos, pues, la necesidad de generar mayores potencias para un cubrimiento de 200 Millas Náuticas, hace a los equipos de un radar de ruta más voluminosos; en sus componentes de potencia, guías de onda, antenas y tratamiento de respuestas.
FRECUENCIA DE REPETICIÓN DE PULSOS Características de los pulsos de interrogación
A continuación presentamos las principales características de los pulsos de energía electromagnética utilizados para la detección de aeronaves por los equipos de radar primario.
Frecuencias de Radar Primario
Los pulsos de energía electromagnética de un radar están ubicados en la banda de UHF (300 Mhz- 3000 Mhz) y de acuerdo a el alcance óptimo para el cual haya sido diseñado se ubican en una sub-banda. La sub-banda es elegida con el criterio de garantizar la frecuencia ideal que de acuerdo al alcance garantiza una alta calidad del eco de respuesta.
RADAR PRIMARIO DE RUTA
Los transmisores de radar primario de ruta generan pulsos con una frecuencia fija que puede ser elegida en la sub-banda 1000 Mhz- 2000 Mhz denominada banda L.
RADAR PRIMARIO DE APROXIMACIÓN
Los radares primarios implementados en un sistema de aproximación, incluyen transmisores que generan pulsos de frecuencia fija elegida en la sub-banda 2000 Mhz- 4000 Mhz denominada banda S.
Tanto en los radares primarios que se utilizan en un sistema de ruta como en los empleados en un sistema de aproximación; el componente de oscilación que garantiza un pulso en la frecuencia que se haya definido, es conocido como MAGNETRON. Un MAGNETRON es un componente oscilador, que garantiza pulsos en la banda de UHF, de alta potencia y con alto índice de estabilidad. Características fundamentales para permitir el cubrimiento en el área estimada y garantizar la calidad de los ecos de respuesta como su tratamiento en los equipos de recepción. Diversidad de frecuencia
Al observar el diagrama de radiación vertical generado por una antena de radar primario, se tiene que su forma es la de una mano con los dedos semiabiertos. Esto significa que existen espacios donde la detección de blancos en la cobertura radar es nula. La solución está en instalar dos transmisores de radar

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
12
operando con una diferencia de frecuencia. Los dos transmisores operan con una diferencia de frecuencia entre los 40 Mhz y 80 Mhz; para reducir la posibilidad de formación de arco dentro de los alimentadores de guías de ondas. Con el uso de las dos frecuencias se logra tener dos diagramas de radiación iguales en su forma, pero uno con una leve elevación mayor que le permite llenar los espacios vacíos, garantizándose así un diagrama de radiación denso.
La diversidad en una estación de radar primario implica que se aumente en distancia EL PODER DE DISCRIMINACION EN EL EJE. Los transmisores de radar primario son disparados uno tras otro con una diferencia en el orden de 2 a 5 microsegundos.
Para el caso de una estación de ruta tendríamos que cada pulso dura 3 microsegundos, lo que significan 6 microsegundos para la transmisión de los pulsos. Si se toma un tiempo de 5 microsegundos entre los pulsos, tendríamos que el tiempo total de transmisión se convierte en 11 microsegundos. Esto significa que la capacidad de distinguir dos blancos que responden a la estación, está sujeta a que éstos se encuentren a una distancia mayor de 1 Milla Náutica. Sólo así se garantiza que sus respuestas sean diferenciadas por los equipos de recepción. Ventajas del Radar Primario El radar primario tiene las siguientes ventajas:
Es un sistema autónomo, que no necesita ayuda exterior. La potencia de pico del transmisor puede ser muy alta, gracias al tiempo relativamente corto
de la transmisión real. Puede usarse una misma antena para la transmisión y la recepción. En las instalaciones de tierra se puede producir un HAZ muy estrecho y exacto, sin aumentar
el tamaño de la antena.
RECEPTORES DE RADAR PRIMARIO Generalidades
La función básica de un receptor de radar es la detección de los ecos que regresan a la antena. La efectividad de un receptor de RADAR es dada por la sensibilidad. Un requerimiento secundario pero no menos importante es la amplificación.
Existe una densidad de potencia reflejada por el blanco, que depende de la superficie “efectiva” del blanco. La energía del eco recibida en antena y dirigida al receptor, es normalmente muy pequeña, su potencial es del orden de microvatios y debe ser amplificada por el receptor hasta que alcance valores aptos para ser llevados a los equipos de tratamientos de información radar. Además, el receptor de radar debe llevar a cabo una función combinada de detección-amplificación evitando cualquier distorsión del pulso del eco, que podría causar inexactitudes en la indicación de distancias. Por consiguiente el rendimiento del sistema depende en gran parte del receptor. Esto puede significar que una pequeña mejora en él puede representar un importante aumento en el alcance efectivo del sistema.
El receptor de radar debe distinguir los ecos sobre el ruido y luego amplificarlos y detectarlos para su presentación en pantalla. Tratamiento en la recepción del radar primario

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
13
Los receptores de radar poseen características que los separan de los receptores de radio normales. En primer lugar, las señales que deben recibir pueden variar en intensidad notablemente, tal es el caso de las respuestas correspondientes a ecos cercanos a la estación, respecto a respuestas de blancos en los límites de cobertura. En segundo lugar, el receptor debe tener un ancho de banda muy amplio de forma que los ecos puedan ser recibidos con mínima distorsión. Partes principales del receptor Además del sistema de antena, las partes principales de un receptor de radar son:
Amplificador de radiofrecuencia. Mezclador. Amplificador de frecuencia intermedia. Control automático de frecuencia C.A.F. Control automático de ganancia.
Factor de ruido del receptor
Los receptores, en general, se encuentran sometidos a una cantidad bastante importante de interferencias a las que se conocen como ruido. En los receptores de radar se entiende por “Detección de la señal”, la capacidad del receptor para distinguir entre las señales del eco y los diferentes tipos de ruidos. Esto constituye la “Sensitividad” del receptor.
El ruido indeseable asociado con los receptores de Radar, puede ser dividido en dos categorías generales:
Ruido producido a la entrada del receptor. Ruido producido dentro del receptor.
La Potencia del ruido puede ser reducida a valores mínimos pero no puede eliminarse totalmente.
De tal forma que siempre existirá algún valor de ruido que deberá competir con la señal y la magnitud de este ruido determinando la sensitividad máxima posible del receptor.
Se considera como mínima señal útil aquella que apenas sea posible distinguir entre el ruido presente. EL ALCANCE MÁXIMO DE UN SISTEMA DE RADAR DEPENDE TANTO DE LA SEÑAL MÍNIMA QUE ES CAPAZ DE ACTUAR EL RECEPTOR COMO DE LA POTENCIA DEL TRANSMISOR LA RELACIÓN SEÑAL / RUIDO ES DE IMPORTANCIA CAPITAL EN LA SALIDA DEL RECEPTOR PUES DE ÉSTA DEPENDE LA CAPACIDAD PARA DISTINGUIR LOS ECOS DE RESPUESTA. Integración de Impulsos:
Como el radar repite periódicamente los impulsos se hace más fácil detectar su aparición sobre el ruido a este efecto se le conoce como integración de impulsos.
EL ANCHO DE BANDA DE LOS RECEPTORES DE RADAR, COMO EL DE CUALQUIER OTRO TIPO, DEBE SER LO SUFICIENTE PARA REPRODUCIR FIELMENTE LOS ECOS Y LO MÁS ESTRECHO POSIBLE PARA DEJAR PASAR MENOS RUIDO U OTRAS SEÑALES NO DESEADAS. SE TRATA DE UN COMPROMISO SELECTIVIDAD-FIDELIDAD.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
14
En exploración de largo alcance o equipos de vigilancia, donde la sensibilidad tiene más importancia que la forma del impulso, es posible utilizar una anchura de banda menor (y, por consiguiente, disminuir el ruido). Indicación de blancos móviles (MTI)
Hemos dicho que en un radar primario, el pulso de energía electromagnética que es irradiado generará ecos de respuesta de todos los obstáculos que encuentre en su camino; sean éstos aviones, nubes, grupos de aves o montañas.
Para un sistema de radar utilizado en el control del tránsito aéreo, es una desventaja que no se discriminen las respuestas, pues, las respuestas no deseadas pueden llegar a dificultar la visualización de los ecos útiles. Por tal motivo, es necesario implementar en la cadena de recepción, un mecanismo que permita la eliminación de ECOS FIJOS o lo que es lo mismo; un INDICADOR DE ECOS FIJOS.
La técnica de eliminación de ecos fijos, más conocida es la que se implementa en un equipo especializado que se coloca a la salida del receptor conocido como MTI. Este equipo tiene la tarea de eliminar aquellos ecos que por su velocidad o por estar fijos deben ser descartados como provenientes de aeronaves.
El MTI es un equipo, cuyo funcionamiento está fundamentado en el principio del EFECTO DOPPLER, el cual podemos sintetizar así: “Cuando una onda electromagnética choca con un blanco en movimiento, el eco de respuesta tiene una variación de frecuencia con respecto a al frecuencia del pulso de interrogación. Este cambio es proporcional a la velocidad con que se mueve el blanco".
El MTI, después de cada pulso de interrogación toma una muestra de éste y la compara con el eco de respuesta; si la frecuencia de los pulsos es la misma o de una variación muy baja, el eco de respuesta de una nube por ejemplo, la señal recibida se considera una respuesta no deseable o también llamada RESPUESTA PARASITA y el equipo MTI la eliminará. De está manera a los equipos de procesamiento de información radar no pasan sino los ecos correspondientes a blancos que se desplazan con velocidades propias de una aeronave.
EL RADAR SECUNDARIO DE VIGILANCIA (SSR) Secondary Surveillance Radar Generalidades
El desarrollo del radar secundario se debió a la necesidad que tenían los controladores para diferenciar, en tiempo de guerra, entre los retornos de radar procedentes de aviones enemigos o amigos.
El sistema de radar primario tipo SCR 270, empleado por los EE.UU. en 1941, permitió que se detectarán los aviones japoneses que realizaron el ataque a Pearl Harbour, pero no pudo evitar el ataque. El radar podía determinar la presencia de aviones, pero no permitía distinguir si esos aviones eran amigos o enemigos.
El estado de guerra hizo que Estados Unidos e Inglaterra aunasen sus esfuerzos y se creó el laboratorio de radiación con lo cual la técnica del radar, que se fue perfeccionando progresivamente, hasta alcanzar las cotas de precisión y de operatividad de que hoy se disfruta.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
15
Los Estados Unidos ( sin poder olvidar el episodio de Pearl Harbour) crearon el primer equipo de radar secundario; el IFF (Identification Friend or Foe - Identificación amigo o enemigo), como se llamo entonces. Con este equipo se podía conocer la identidad de un eco radar, además de su posición y distancia.
En su forma más elemental, el IFF consistía en un transmisor que operaba en unos 200 Mhz y alimentaba una antena montada en la parte superior de la antena del radar primario, que interrogaba a un respondedor montado en el avión.
El desarrollo posterior reveló que, fijando en el avión un respondedor adecuado, el radar secundario tenía ventajas notables sobre el primario como son:
La potencia del transmisor podía ser relativamente baja comparada con la del equipo del radar primario.
Las señales de retorno, que no dependían de la reflexión, sino de la transmisión consecuente del avión, eran de intensidad superior y mayor fiabilidad.
Los retornos del avión podían ser codificados para pasar información a la estación de radar. Este sistema constituye una valiosa ayuda para el controlador en lo referente a la ordenación del tráfico aéreo dentro de una zona determinada. La identificación positiva proporcionada por el radar secundario evita la necesidad de pedir al piloto que haga un viraje para poder identificar su eco en la pantalla de radar. El radar secundario aumenta también el alcance y facilita la detección e identificación de aviones en presencia de ecos de lluvia o de tierra. El SSR le permite al controlador identificar sin posibilidad de error un determinado avión. El Radar Secundario de Vigilancia en el control del tránsito aéreo
El rápido crecimiento del transporte aéreo civil internacional y doméstico desde la segunda guerra mundial, conllevó a que el control del tráfico aéreo no pudiera mantener la seguridad en el aire mediante
el sólo empleo del radar primario de vigilancia (PSR) y sus procedimientos.
El aumento del tráfico aéreo, la rapidez de los aviones modernos y las exigencias del control de la circulación aérea, llevan a enfrentar el estudio y la puesta en servicio de sistemas de radiodetección susceptibles de dar al controlador la máxima información sobre las “trazas” que el tiene a cargo.
El radar clásico (Radar Primario) ya ha permitido la adopción de separaciones más débiles entre “blancos” (aviones) con el fin de aumentar la evacuación del tráfico y de utilizar de una mejor manera el espacio aéreo. Sin embargo, las informaciones obtenidas con la ayuda de tales sistemas, dan lugar
ANTENAS DE RADAR
PSR y SSR

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
16
a una representación plana del espacio aéreo vigilado.
El radar primario de vigilancia (PSR) no cuenta con la cooperación activa del blanco presentando los siguientes inconvenientes:
P 1 P 2 P 3
0 , 8 µ S 0 , 8 µ S 0 , 8 µ S
2 µ S
i µ Si m p u l s o s q u e d e f i n e n e l m o d o
p o r e l v a l o r d e i
Debe radiarse suficiente energía para asegurar que se reciba el mínimo nivel detectable de
energía en el PSR tras el trayecto completo para un blanco deseado en el límite de cobertura.
En la presentación aparecerán otros objetos (ecos parásitos) además de los aviones, esto a pesar de que el sistema cuente con un MTI para la eliminación de dichos ecos.
No puede identificar un avión individual a no ser que realice una maniobra requerida.
No se conoce la altitud del avión a no ser que se use un radar determinador de altitud
separado. No se dispone de ningún enlace de información.
Como consecuencia de estas limitaciones se tienen las siguientes desventajas en los servicios de
control radar:
El controlador no dispone instantáneamente de las informaciones de altitud ni de identificación de los “blancos”.
Todos los aviones envían respuestas semejantes.
Esto va en contra de una fuerte densidad de tráfico, porque el conocimiento de estos dos
parámetros exige el intercambio de mensajes entre el controlador y el piloto, a fin de llenar las lagunas aportadas por el sistema de detección de radar primario, el controlador puede, por ejemplo, pedir al piloto modificar ligeramente su ruta a fin de identificar la respuesta. Todo eso entraña por lo tanto una pérdida de tiempo, en detrimento de un aumento posible del tráfico.
Un sistema que permita disponer, además de las informaciones “acimut- distancia”, de la altitud y de la identificación de los “blancos”, debe poder satisfacer ciertas exigencias del control.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
17
El radar secundario permite alcanzar el papel que se le fija, a saber:
Detección de un blanco.
Posición de este blanco en el espacio (tridimensional).
Identificación del blanco.
La información sobre la identificación y la altura del “blanco” exige una participación activa de éste; y se entreve ya la necesidad de embarcar, a bordo, un respondedor que reenvíe de vuelta una respuesta codificada, portadora de la información.
Esto puede parecer una dependencia si se considera solo el material embarcado, pero un blanco activo puede sin embargo, presentar numerosas ventajas así como se verá a medida que se estudie el sistema.
En el radar secundario, el blanco toma parte activa en el proceso de determinación de la distancia y posición. Esto se realiza haciendo que el blanco emita una señal cuando recibe la procedente de la estación de principal de radar en tierra.
Cuando la señal inicial de radar alcanza el blanco, se recibe y se genera una respuesta por medio de un equipo instalado en el mismo, dando lugar a la emisión de una nueva señal. Esta nueva señal es captada por el receptor de radar principal para ser presentada en los sitios de control. El RADAR SECUNDARIO es un sistema de identificación y recepción de datos a través de la respuesta del avión al impulso de radar. El avión deja de ser un blanco pasivo, para convertirse en un blanco activo que colabora contestando.
La técnica empleada en el radar secundario mejora las actuaciones del radar, ya que el impulso no necesita energía para ida y vuelta, sino sólo para la ida, por otra parte, la codificación de la información en la respuesta, facilita enormemente la labor del control.
3 / A
1 7 µ S
P 1 P 2
T A B L A D E M O D O S D E I N T E R R O G A C I O N E N S S R
3 / A
8 µ S
V a l o r i
1
2
B
C
D
3 µ S
5 µ S
8 µ S
1 7 µ S
2 1 µ S
2 5 µ S
I D E N T I F I C A C I O N
A L T U R A ( N . V U E L O )
N O U S A D O
3 µ S
5 µ S
2 1 µ S
2 5 µ S
M o d o s R e p r e s e n t a c i o n e n e l t i e m p o U t i l i z a c i o n
P 1
P 1
P 1
P 1
P 1
p 3
p 3
p 3
p 3
p 3
P 1

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
18
Si bien el radar secundario es un sistema completo, que coexiste con el primario, no deben ser abarcados con la potencia y alcance del radar primario. La existencia del radar primario y secundario también permite disponer de la redundancia que implica el duplicar el sistema de radar.
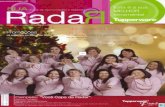
MODOS DE INTERROGACIÓN Y CLAVES DE RESPUESTA
La expresión “modo de interrogación”, se usa para describir la clase de transmisión de pares de impulsos desde los interrogadores terrestres.
Como ya sabemos, la interrogación consiste en la transmisión de tres impulsos de una duración aproximada de 0,8 microsegundos y entre el primer impulso y el tercero, que determina el modo, el intervalo es el siguiente: MODO A..............8+/-2 microsegundos de intervalo. MODO B..............17+/-2 microsegundos de intervalo. MODO C..............21+/-2 microsegundos de intervalo. MODO D....25+/-2 microsegundos de intervalo. MODO S....16,25 o 30,25+/-2 microsegundos de intervalo.
En la aviación militar, el Modo 3 corresponde al Modo A civil. Siendo el modo básico de los servicios de tránsito aéreo el 3/A. El modo C corresponde al de altitud y se utiliza para conocer de forma auténtica la altitud de presión de las aeronaves. La información que proporciona el modo C, por medio de un impulso suplementario a los impulsos de la respuesta normal, se presenta numéricamente, en la pantalla radar, al lado de la traza radar. Los modos B y D están reservados para futura utilización y el S para enlace de datos.
Las claves o códigos de respuesta, es el término que se utiliza para describir las respuestas efectuadas desde las aeronaves a las estaciones terrestres. En la actualidad, la mayoría de las aeronaves utilizan respondedores de 4 dígitos, desde la cifra 0 hasta la 7, con las cuales es posible seleccionar hasta 4096 claves diferentes, que corresponden a las diferentes formas de situar la presencia (1) o ausencia (0), de un par de impulsos de referencia en cada una de las 12 posiciones posibles.
Cuando un controlador desea identificar a una aeronave de las que tiene situadas en la pantalla radar, le indicará: “ Pase a identificación” debiendo proceder el piloto a accionar el pulsador SPI de su equipo, apareciendo entonces durante un período entre 15 y 30 segundos en la pantalla radar una traza adicional que identifica plenamente a la aeronave.
PROBLEMAS ASOCIADOS AL SSR
Algunos de los problemas de utilización del radar secundario son comunes a los del primario, pero en concreto los que se refieren a la utilización del modo A/C, son los siguientes:
Confusión en los códigos debido al solapamiento en las respuestas de aeronaves muy próximas en acimut y distancia, pudiendo resultar de esta forma claves falsas.
Respuesta no sincronizada, resultando interferencias en un interrogador ocasionadas por las
respuestas de un respondedor y que se encuentra en contacto con otro interrogador. Es decir, interferencias causadas por el funcionamiento de varias estaciones terrestres SSR próximas.
Disponibilidad de sólo 4096 claves en el Modo A para identificación de aeronaves.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
19
Apantallamiento de la antena debido al comportamiento de la aeronave.
UTILIZACIÓN DEL RADAR SECUNDARIO DE VIGILANCIA
Como ya se indicó anteriormente, la utilización del radar SSR por los servicios ATS empezó con el empleo de la clave de dos cifras (64 claves en el modo 3/A).
A continuación se pasó a operar con 4096 claves correspondientes a 4 cifras en el modo 3/A. Se complementó con el modo C (altura) y ahora ha comenzado la era del modo S.
En la actualidad, en muchos lugares del mundo, entre ellos Europa, debido a los avances tecnológicos el respondedor exigido es el A/3 con 4096 claves, no permitiéndose, salvo autorización expresa, el de 64. Asimismo la tendencia se dirige hacia la implementación que operen en VFR en determinadas zonas del espacio aéreo tales como las colindantes con grandes aeropuertos, o por encima de niveles especificados.
La utilización del radar para proporcionar servicios de tránsito aéreo se efectúa dentro de las áreas de cobertura radar.
Para
asegurar el empleo seguro y eficaz del SSR, los pilotos y
controladores deben seguir estrictamente los procedimientos de
utilización publicados. En particular, se utilizará la
fraseología radiotelefónica
normalizada y se procurará en todo momento el reglaje correcto de los modos y claves de los respondedores y del equipo terrestre del
descifrado.
La asignación de claves SSR se realiza, conforme a los acuerdos regionales de navegación aérea, por la autoridad ATS competente. . En general, se procura mantener al mínimo indispensable los cambios de clave que se solicitan a los pilotos cuando vuelan dentro del área de cobertura del mismo SSR.
En muchos casos, principalmente durante la fase en ruta, la aplicación de la tecnología SSR permite el control silencioso, es decir la utilización de las comunicaciones sólo para cambios en el plan de vuelo actualizado, o por necesidades del ATC.
PROBLEMAS DEL RADAR SECUNDARIO (SSR)PROPAGACION MULTIPLE ( CAUSADA POR REFLEXIONES DE TIERRA )
SE REDUCEN NOTABLEMENTE :1) ELIGIENDO OPORTUNAMENTE EL SITIO DE INSTALACION Y ALTURA
DE LA TORRE.2) UTILIZANDO ANTENAS DEL TIPO “OPEN ARRAY”

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
20
Existen unas claves específicas de utilización SSR:
MODO A/3 clave 7700. EMERGENCIA
En caso de emergencia, a menos que el piloto de una aeronave que se enfrenta con una situación de emergencia haya sido instruido anteriormente por el ATC para que haga funcionar su respondedor SSR en una clave específica, normalmente continuará utilizando esa clave hasta que se le indique lo contrario.
MODO A/3 Clave 7600. FALLO DE RADIO
En el caso de que haya fallo de radio, los pilotos seleccionarán este modo y clave y seguirán los procedimientos establecidos; el control subsiguiente se basará en dichos procedimientos.
MODO A/3 Clave 7500. INTERFERENCIA ILÍCITA Para indicar específicamente que una aeronave objeto de interferencia ilícita.
Cuando un piloto haya seleccionado el código 7500 Modo A y el ATC le pida posteriormente que confirme su clave, el piloto lo confirmará o no responderá según las circunstancias. La ausencia de respuesta por parte del piloto será interpretada por el ATC como un indicio de que el empleo de la clave 7500 no se debe a una selección involuntaria de una clave incorrecta.
MODO A/3 Clave 7000 y MODO C. VUELOS NO CONTROLADOS: MODO A/3 Clave 2000 y MODO C. VUELOS CONTROLADOS
En algunos respondedores es posible reprogramar un código VFR determinado. Cuando se selecciona
el Modo C o Modo ALT, el respondedor proporciona información sobre el nivel de vuelo de la aeronave. Es decir, sobre la superficie isobárica de 1013,2 hPa. El valor de la tolerancia que deberá utilizarse para determinar que la información sobre el nivel derivada del Modo C presentada al controlador es exacta, es de 90 m (300 pies).
De acuerdo con esto se deduce que el criterio que se utiliza para determinar que un cierto nivel está ocupado por una aeronave será de 300 pies. No obstante, las autoridades ATS competentes pueden reducir este valor hasta un mínimo de 60 m (200 pies).
Salvo en las situaciones críticas, fallos de radio, o cuando el ATC pida al piloto que cambie su modo y/o la clave, los pilotos utilizarán su respondedor de acuerdo con las directrices del ATC.
Sin embargo, si la aeronave está equipada con modo “C” el piloto debe utilizar sistemáticamente este modo cada vez que reciba instrucciones de utilizar un modo con objeto de identificación.
Los pilotos no deben accionar el dispositivo SPI (identificación) del SSR más que a petición del control de tránsito aéreo.
EL MODO S
Desde hace casi treinta años se está utilizando, para tareas de vigilancia, el radar secundario de vigilancia SSR. Pero la saturación del espacio aéreo ha disminuido apreciablemente las posibilidades efectivas del control convencional, motivo por el cual en el futuro se utilizarán las oportunidades que brinda la tecnología para automatizar y organizar el control de tránsito aéreo. Generalizándose, para conseguir un escenario organizado y automatizado de control de tránsito aéreo, la utilización del enlace

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
21
digital de datos, para lo cual se recurrirá al empleo del Modo S y otros medios de transferencia de datos entre las estaciones de tierra y de aeronave.
El SSR Modo S, es un sistema de comunicaciones y vigilancia independiente cooperativa, que
utiliza la técnica del monoimpulso, común en el SSR existente modificándola mediante la adición de la característica de interrogación selectiva.
Estas técnicas de monoimpulso permiten la identificación de la aeronave y su posición en tres dimensiones, mientras reducen el número de interrogaciones necesarias.
El enlace de datos del Modo S. asociado con la función de vigilancia del radar secundario (SSR), permite mejorar la vigilancia al disminuir con el enlace de datos las posibilidades de error en las comunicaciones con el ATC. Además, con el Modo S se puede seleccionar de forma inequívoca tanto la aeronave que se desea interrogar, como el momento de efectuarlo. Para lo cual cada aeronave equipada con Modo S tiene asignada una dirección única o exclusiva. Funcionamiento del Modo S
En el SSR Modos A y C, cada aeronave que se encuentra dentro de la cobertura del radar secundario recibe y responde a cada interrogación. En el Modo S. la capacidad de seleccionar las aeronaves impide que se produzca una interrogación indiscriminada y un exceso de respuestas.
Para su funcionamiento a efectos de vigilancia, el Modo S realiza una primera interrogación por aeronave por cada barrido de la antena, repitiéndola sucesivas veces si no se recibe una respuesta valida.
Para adquirir nuevas aeronaves, el Modo S envía una llamada general a todas las aeronaves que en ese momento se encuentran dentro de la zona de cobertura. De esta forma se logra que las aeronaves, que todavía no han sido interrogadas, respondan a dichas interrogaciones con una respuesta general, cuyo contenido incluirá la dirección exclusiva de la aeronave.
A partir de aquí las nuevas aeronaves, que ya han sido incluidas en el proceso, pueden ser interrogadas individualmente
Para evitar la confusión asíncrona, que se puede producir en áreas de alta densidad | de tránsito, se utiliza una característica denominada bloqueo, por la que mediante un modo se instruye a la aeronave que ya ha sido adquirida por un interrogador, para que no responda a llamadas generales procedentes del citado interrogador. El enlace de datos en el Modo S
Para las interrogaciones y respuestas, el Modo S utiliza los siguientes formatos de datos digitales, de 56 y de 112 bits de información, con capacidad de enlace de datos:
Formato de vigilancia: 56 bits dedicados fundamentalmente dedicados a la función de vigilancia (altitud y código Modo A).
Formatos COM A y COM B: 56 bits dedicados a la vigilancia y control; y 56 bits para el
enlace de datos.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
22
Formatos COM C y COM D: 32 bits dedicados a funciones de control de la vigilancia y paridad; y 80 bits para el enlace de datos.
El número de bits utilizado para los mensajes del enlace de datos, a menudo, puede ser insuficiente
para la transferencia de volúmenes superiores de información. Por este motivo, se han establecido protocolos de comunicación para colocar en secuencia:
Hasta 4 veces los datos de los mensajes de longitud normal (SLM), correspondientes a los de 56 bits de los formatos A y B;
Hasta 16 veces los datos de los mensajes de longitud ampliada (ELM), correspondientes a los
de 80 bits de los formatos C y D. Es decir, 16 X 80 = 1.280 bits. Los principales ele mentos del enlace de datos en el Modo S son los siguientes: Estación de aeronave: Respondedor en Modo S (básicamente para mensajes SLM) y procesador de a bordo.
Estación terrestre: Estación terrestre (módem) en Modo S y procesador en tierra para la transmisión de los mensajes y su encaminamiento.
Ventajas de la vigilancia en Modo S
Las ventajas derivadas de la vigilancia en Modo S son las siguientes:
Al disponerse de más de 16 millones de direcciones, se puede conseguir una identificación unívoca y contar con un medio de establecer comunicaciones individuales con cada una de las aeronaves que tengan equipo adecuado.
Las interrogaciones de llamada selectiva dirigidas a aeronaves que estén entre si, poco
distanciadas pueden temporizarse de forma que las respuestas no se superpongan, eliminándose así el problema de la confusión asíncrona lo que mejorará considerablemente la confiabilidad de la vigilancia de aeronaves que se encuentren, por ejemplo, en circuito de espera.
En los sistemas que utilizan seguimiento radar, las respuestas etiquetadas con la dirección de
la aeronave pueden asociarse sin ambigüedad con las trazas correspondientes, desapareciendo así los problemas de vigilancia en Modo A/C consistentes en la formación de trazas divididas o troceadas, y atenuándose también el problema de la reflexión. El procesamiento del interrogador para lograr la correlación respuesta a traza es mucho más simple que el actual procesamiento SSR.
Se puede lograr la vigilancia en una única transacción interrogación/respuesta durante cada
exploración, disminuyendo así la interferencia de señales de los interrogadores en Modo S.
Si en el seguimiento de una aeronave, esta no responde a una interrogación, es posible realizar una adaptación para volver a interrogar a dicha aeronave sin tener que volver a interrogar a las otras aeronaves en el haz. Esto mejora la confiabilidad de la vigilancia de aeronaves que pudieran temporalmente tener un enlace marginal y no genera respuestas no deseadas.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
23
Los interrogadores en Modo S pueden limitar las interrogaciones discretas a las aeronaves que se encuentren dentro de un volumen definido de cobertura, y dicho volumen puede adaptarse a las necesidades, por ejemplo, cuando se proporciona cobertura redundante en un medio con varios radares.
La codificación en Modo S apoya la detección de errores en ambas direcciones así como la
corrección de errores en el enlace de respuestas. La detección de errores proporciona una lectura confiable de la altitud de la aeronave y demás información transmitida. La corrección de los errores aumenta la probabilidad de tener éxito en las respuestas.
Por ultimo, en el Modo S. además de la inclusión de los servicios propios del SSR Modo A/C
(altitud, identificación y posición), hay que tener en cuenta también estas otras aplicaciones, ventajas e inconvenientes:
Compatibilidad con el SSR Modo A/C
Posibilidad de acceso desde la aeronave a bases de datos terrestres; Posibilidad de acceso desde tierra a los parámetros de vuelo de la aeronave que pueden ayudar
al ATC en la gestión del vuelo: Posición, rumbo, virajes, información meteorológica, tipo de aeronave, peso, etc.; Prenotificación de las intenciones del ATC; Posibilidad de dialogo piloto/ controlador;
Gran exactitud, por medio de las técnicas de medición del acimut de la aeronave por monoimpulso, es
decir, por medio de un único impulso en cualquier respuesta del respondedor, la precisión puede alcanzar valores de décimas de grado en acimut y valores cercanos a 6 metros en distancia;
Posibilidad de notificar la altitud en incrementos de 25 pies, mientras que la resolución procedente del SSR Modo A/C, alcanza solo los 100 pies; Asimismo, con el enlace de datos en el Modo S se puede:
notificar directamente la identificación de la aeronave que figura en la casilla correspondiente del plan de vuelo, eliminando de esta forma las ambigüedades;
confirmar que está libre un nivel;
proporcionar servicio de asesoramiento y de información de tránsito aéreo;
proporcionar nuevas frecuencias de comunicaciones;
vigilar vehículos en tierra;
proporcionar avisos de seguridad,
informar sobre incursiones en espacios aéreos restringidos, etc.
El enlace de datos en el Modo S permite a las aeronaves notificar si se encuentran en vuelo o en
tierra, información útil para el tratamiento de datos radar, para la asociación automática del plan de vuelo y de los datos radar, y para el procesamiento de la vigilancia ACAS.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
24
También hay que tener en cuenta, referente a la detección automática de conflictos, que por medio de seguidores radar se pueden predecir las posiciones futuras de las aeronaves (próximos waypoints), funciones que pueden ser reforzadas proporcionando el rumbo y el ángulo de inclinación de la aeronave.
El enlace de datos puede permitir evitar: las dificultades de lenguaje, la deficiente fraseología, la interpretación errónea de los mensajes, los mensajes incompletos, la falta de acuse de recibo, etc. Entre las ventajas del Modo S se incluye que:
El sistema de a bordo no necesita ser redundante, aunque es preferible la utilización de una doble antena;
En los enlaces de datos en Modo S la flexibilidad puede proporciona diferentes tipos,
longitudes e intercambios de mensajes aire/tierra y tierra/aire; El enlace de datos permite:
reducir el tiempo de preguntas y respuestas y de ocupación de los canales de comunicaciones;
una mejor distribución de la información a las aeronaves;
reducir los retrasos en las líneas aéreas, los costes de operación y el tiempo de vuelo;
disminuir los errores y la carga de trabajo de los controladores;
aumentar la seguridad;
mejorar la transmisión de datos meteorológicos desde la aeronave a tierra, obtener información meteorológica desde los centros terrestres de datos (TAFOR, ATIS, VOLMET, etc.).
Los inconvenientes del Modo S
Las limitaciones tecnológicas derivadas, hasta la implantación de antenas electrónicas, de la típica utilización en el SSR de una antena rotatoria;
La imposibilidad de intercambiar datos si la aeronave no se encuentra en el haz de la antena
terrestre, motivo que puede ocasionar que la información haya de transmitirse dividida en varios ciclos con la consiguiente lentitud en la transmisión;
La limitación que ocasiona que sólo la estación terrestre pueda determinar cuando se produce,
después del contacto inicial, una nueva interrogación a la aeronave.
Asimismo, aunque no sea realmente un inconveniente, hay que citar que, a medida que progrese el sistema ATN así como la utilización masiva del FMS y los enlaces fijos por satélite, existe la posibilidad, en detrimento de la función de seguridad, de desviación en el uso del Modo S más hacia la función de enlace de datos.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
25
El Modo S en Europa
Como hemos visto, cuando una aeronave esta equipada con el Modo S sólo tiene una clave de interrogación, e ignora todas las demás interrogaciones que no van dirigidas a ella. Aquí radican las enormes posibilidades del Modo S. principalmente si va asociado a un computador. Con este sistema se puede evitar, al contrario de como ocurre con el Modo A/3, que se superpongan los ecos de las aeronaves.
Al ser selectiva la interrogación, existe la posibilidad de que se pueda operar en los enlaces bilaterales tierra-aire con diferentes niveles. El nivel básico permitiría la compatibilidad en el Modo S. y en otros niveles se irían aumentando progresivamente las capacidades Ejemplo: notificación automática de la identificación de la aeronave, datos relativos a plan de vuelo, comunicaciones numéricas como complemento de las orales, transmisión de datos aire-tierra. etc.
La OACI tiene previsto un plan mundial para asignar una dirección exclusiva en Modo S a cada aeronave dotada de SSR en Modo S. El plan, según una circular de información aeronáutica, se divide en dos esferas de responsabilidad: Responsabilidad de la OACI:
Atribuir a los Estados bloques de direcciones SSR en Modo S (igual para todas las aeronaves matriculadas en ese Estado). Responsabilidad del Estado: - Asignar una dirección del bloque establecido a cada aeronave.
Para dar cumplimiento al Plan, se indica que cada compañía explotadora deberá dirigirse a la Aeronáutica Civil, para solicitar la asignación de una Dirección SSR Modo S a cada una de las aeronaves dotadas con respondedores capaces de funcionar en el Modo S del SSR.
La dirección SSR asignada a una aeronave será exclusiva para ella y permanecerá en vigor mientras la aeronave no cambie de Estado de matrícula, o sea dada de baja en el Registro de Matrículas.
La orientación de los Estados miembros de Eurocontrol se dirige hacia la exigencia para todas las aeronaves del tránsito aéreo general y que operen en IFR, a equiparse con respondedores en Modo S antes del inicio del año 2.000 para tener, como componente fundamental del sistema ATN, una parte significativa del espacio aéreo europeo cubierta con el Modo S en los primeros años del 2.000.
De todas formas, aunque en áreas de alta densidad de tránsito exista la necesidad, aprovechando la capacidad de comunicaciones del SSR Modo S. de reducir las comunicaciones en fonía en favor de las de enlace de datos, que admiten una información en bits por segundo superior en mas de 10 veces a la de los citados canales en fonía, queda todavía, en este aspecto, un largo camino que recorrer pues, además de ser necesaria una completa automatización tanto en aire como en tierra, habría que contar, entre otras, con las actitudes, desde el punto de vista de confianza en relación con la fiabilidad total del sistema, tanto de los pilotos como de los controladores.
LA VIGILANCIA DEPENDIENTE AUTOMÁTICA
La incidencia que en la separación de aeronaves en los espacios aéreos oceánicos y en otras zonas remotas o poco habitadas, tienen los errores crasos de navegación (superiores a 25 NM), todavía obligan a la aplicación de grandes separaciones entre aeronaves. Separaciones que en un espacio aéreo como, por ejemplo, el del Atlántico Norte disminuirían sensiblemente el número de rutas disponibles produciendo,

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
26
en principio, el efecto de una congestión inadmisible. Hasta ahora, en estas zonas sin posibilidades de vigilancia radar, el control de los vuelos se efectúa a base de los informes de posición que las aeronaves realizan en sus comunicaciones limitadas al HF, por encontrarse las frecuencias de VHF fuera de la cobertura de transmisión con los servicios de tránsito aéreo.
Por estos motivos, para mejorar la organización del tránsito aéreo y poder disponer de un mayor numero de rutas que permitan, por ejemplo, que las aeronaves elijan las más convenientes para el confort de los pasajeros o para disminuir los costos de operación, como pueden ser las de la corriente en chorro, el Comité FANS del Consejo de la OACI concibió, dentro del sistema CNS, el de vigilancia conocido como ADS (Vigilancia Dependiente Automática).
El sistema ADS se define, como una función para uso de los servicios de tránsito aéreo (ATS), en la cual una aeronave transmite automáticamente, por enlace digital de datos, aquellos extraídos de su sistema de navegación de a bordo.
Aunque en la ADS tenga gran importancia la precisión del sistema utilizado, pr incipalmente INS, OMEGA, LORAN, GNSS; una de sus ventajas reside en el hecho de poder permitir a las aeronaves y a los servicios ATS trabajar con la misma información de referencia. La utilización de la ADS se ciñe principalmente a:
espacios aéreos oceánicos con rutas establecidas sobre alta mar;
espacios aéreos con escasa densidad de tránsito;
espacios aéreos con alta densidad de tránsito, asociado o como sustituto del SSR;
otros espacios aéreos donde se realicen operaciones a baja altitud. Los elementos de la ADS
El sistema de navegación de la aeronave, las comunicaciones por enlace de datos y la presentación al controlador de tránsito aéreo, son tres parámetros fundamentales para garantizar, en aquellos lugares donde el volumen del tránsito aéreo lo requiera o sea necesario disponer de la mayor precisión que puede proporcionar un sistema ADS de control de tránsito aéreo, la seguridad, flexibilidad, rapidez y eficacia.
Parámetros que, desde el punto de vista técnico y en función de las necesidades de precisión, operativas o de otro tipo, de un sistema ATC basado en ADS, utilizarán para su funcionamiento la integración, con mayor o menor grado de sofisticación de los siguientes elementos funcionales: Automatización del ATC El sistema ADS representa la base fundamental para la automatización del ATC.
En efecto, los datos procedentes de la aeronave, incluidos los waypoints, se procesan y comparan automáticamente con los correspondientes a la ruta nominal de vuelo autorizada, verificando que se cumple el plan de vuelo y/o la autorización recibida sin exceder los márgenes de tolerancia. Otras funciones de la automatización del ATC, incluyen: • la evaluación de conflictos y los avisos de resolución característicos del ACAS;

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
27
• la presentación de la situación operativa del tránsito; • la conformidad con un plan de vuelo determinado; • la vigilancia; • los informes de posición y la información de vuelo; etc. Interfaz entre el computador, controladores y pilotos
La interfaz entre el computador y los controladores debe permitir el tratamiento continuo de la información y su presentación al controlador de manera perfectamente asimilable. Esta información debe comprender la situación exacta del tránsito aéreo en tiempo real.
Además, la interfaz debe ser capaz de: detectar los errores, alertar sobre reducciones sensibles de las separaciones entre aeronaves, gestionar y transmitir mensajes ATS a través del enlace de datos, mantener un canal en fonía para comunicaciones de emergencia o para otras situaciones, alertar sobre mensajes no recibidos, etc.
A bordo de la aeronave, la transmisión de datos para la vigilancia ADS se realiza sin intervención del piloto; no obstante, el piloto puede vigilar la operación del sistema, gestionar la transmisión de los mensajes, intervenir en casos urgentes o de emergencia, etc. Enlace de comunicaciones
Para su funcionamiento, un sistema de gestión de tránsito aéreo (ATM) necesita que exista una red terrestre de comunicaciones, para conectar las dependencias ATS con las estaciones terrestres responsables de realizar el enlace de datos aire/tierra, de forma que se garantice el encaminamiento de los mensajes ADS a los usuarios finales (Control en ruta, FIC, APP, TWR, Control Militar, etc.). La planificación de esta red se efectúa de acuerdo con el concepto ATN.
Por su parte, para el enlace de datos, el ADS permite realizar las comunicaciones por medio del enlace digital VHF, SSR Modo S. por el sistema de satélites geoestacionarios (SMAS) o por HF. Aviónica de a bordo
A bordo de las aeronaves, la aviónica disponible debe permitir la transmisión automática a las estaciones terrestres de los datos que han sido extraídos de su sistema de navegación (incluidos el FMS y el INS/IRS), que componen el mensaje básico de vigilancia ADS, tales como: • Identificación de la aeronave (identificador único). • Posición en tres dimensiones. • Hora de emisión del mensaje. • Precisión de la posición. • Otros mensajes que complementan al básico con información sobre rumbo/derrota/ruta, veloc idad de la aeronave, intenciones del piloto, datos meteorológicos, etc.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
28
Ventajas e inconvenientes de la ADS
Un sistema ADS, que de alguna forma combina las tres funciones CNS, se basa principalmente, para determinar la posición de las aeronaves, en los datos proporcionados por los sistemas de navegación de a bordo. Datos dependientes que, al ser frecuentemente enviados a las correspondientes estaciones terrestres, junto con otros relativos a identificación de la aeronave, intenciones del piloto al mando, información meteorológica, etc., permiten a los servicios de control distinguir las desviaciones que se producen relativas al perfil de vuelo asignado y de esta forma descubrir, por ejemplo, posibles errores humanos debidos a la deficiente inserción de waypoints.
Por este motivo, con la ADS se potenciará la seguridad, se podrán reducir las separaciones entre aeronaves aumentando la capacidad de gestión de tránsito aéreo y en aquellos lugares donde no exista radar, se podrá acceder a una vigilancia pseudoradar que permitirá, por ejemplo, mejorar la capacidad del servicio de búsqueda y salvamento.
En las áreas donde exista cobertura radar, el apoyo de la ADS al SSR permitirá aumentar la precisión y mejorar ciertas carencias del SSR, por ejemplo: falsas respuestas, escaso número de claves, etc.
En primer lugar, en la parte negativa destacamos que la cobertura de la ADS se encuentra condicionada por el sistema de comunicaciones utilizado.
En segundo lugar hay que indicar que, si bien la utilización de sistemas de satélite proporciona cobertura casi mundial, en el caso de que se produzca el fallo de un elemento de la ADS, este puede influir en las operaciones de la forma que se indica a continuación: • El fallo de todas las comunicaciones de a bordo, o de todo el equipo de navegación repercutirá en la perdida, para la aeronave de que se trate, de la función ADS. Imposible prestar ayuda desde tierra. • El fallo del sistema de navegación, por ejemplo del GNSS, repercute en las funciones de vigilancia y de navegación de todas las aeronaves que estén volando dentro de la misma zona de cobertura. • El fallo del enlace de datos entre el ATC y el sistema de satélite, repercutirá en las comunicaciones ATC y en la vigilancia de todas las aeronaves que estén volando dentro de la misma zona de cobertura. • Otro tipo de fallos de algún sistema de a bordo, excluida la recepción de señales de satélite, Omega, etc., repercutirá sólo en la aeronave de que se trate.
Diferentes organismos internacionales han establecido y realizado numerosos programas y pruebas sobre la ADS.
En este programa, los equipos de enlace con el satélite y el sistema de gestión de la red (Network Management System, NMS), encargado de servir de interfaz entre los usuarios terrestres y el satélite MARECS-B2 operado por INMARSAT, se situó en la estación de seguimiento de satélites de Villafranca del Castillo en las proximidades de Madrid. Este programa experimental incluye principalmente los servicios ATS, los servicios de control de operaciones aeronáuticas (AOC) y las comunicaciones telefónicas y de datos de los pasajeros (APC). Existen otros sistemas, programas, o intenciones que continúan desarrollándose o quedarán en solo supuestos:

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
29
• el sistema INMARSAT, sistema de satélites fundamental para el tráfico marítimo, tiene también su parcela en el mundo de la aviación, proporcionando servicio de enlace de datos aire-tierra. LA VIGILANCIA INDEPENDIENTE COOPERATIVA (CIS)
La vigilancia independiente cooperativa proporciona al ATC la posición tridimensional de una aeronave con independencia de sus sistemas de navegación. Es decir, la determinación de la posición se lleva a cabo a partir de instalaciones en tierra, no como ocurre con la ADS en la que la posición se obtiene de los equipos de navegación de a bordo.
Vigilancia independiente cooperativa es la realizada por medio del SSR, en la cual una aeronave responde (carácter cooperativo), a las señales enviadas desde tierra.
No obstante, el sentido <<moderno>> de la CIS se refiere a la utilización de técnicas satelísticas para la determinación de la posición. De esta forma la cobertura de la CIS no queda limitada al alcance visual.
En esencia, la función de vigilancia de la CIS se basa en la transmisión desde tierra de una señal a una aeronave a través de un satélite. La aeronave, al recibir la señal, la retransmite a su vez a dos o más satélites, desde los cuales se recibe la respuesta en tierra. Como la posición de los satélites es conocida, es sencillo determinar, en función de la diferencia de tiempo en recibir la retransmisión desde los satélites, la posición de la aeronave.
Con este sistema, para lograr la cobertura mundial, excluidas las regiones polares y por problemas de ambigüedad ciertas zonas situadas cerca del ecuador, seria necesario disponer de un mínimo de ocho satélites.
Probablemente, una de las aplicaciones mas acertadas de la CIS, al no ser posible con este sistema el enlace de datos, sea la combinación con la ADS. De esta forma, se podrían completar los niveles de redundancia necesarios para la aplicación de la ADS.
LA PANTALLA RADAR Por décadas el control de tránsito aéreo y su industria se ha caracterizado por la lenta evolución y aceptación de prácticas y tecnologías. Los requerimientos por lo menos se han actualizado para proveer pantallas de control de alta resolución, permitiendo de esta manera una mayor información de los datos de vuelo, lo que proporciona una mayor seguridad al ATC. La mayoría de programas Radar ATC han sido desarrollados en pantallas circulares monocrom o a color de 20-24 pulgadas. Igualmente existen presentaciones más pequeñas de 15 pulgadas diagonales o menos. Estas proveen entre otros la siguiente información:
Identificación de la aeronave Información meteorológica Movimiento de aeronaves en tierra
La pantalla radar tiene forma graduada de 0º a 360º, coincidiendo el 0º con el Norte magnético. Un eco sobre ella (traza) se determina por medio de coordenadas polares (distancia y acimut).

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
30
Con objeto de facilitar la apreciación de las distancias, una serie de círculos concéntricos permiten conocer la distancia de la traza con relación al centro de barrido, el cual puede ser modificado situándolo en cualquier punto de la pantalla.
En el caso de que aparezcan varias trazas correspondientes a distintas aeronaves sobre la pantalla radar, será preciso efectuar una identificación previa. La efectividad del radar está limitada por varios factores entre los que destacamos los siguientes:
los reflejos y atenuaciones producidos por fenómenos atmosféricos, tales como: precipitaciones, nubes tormentosas, inversiones de temperatura, etc.;
las propagaciones anómalas que producen ecos extraños en la pantalla del operador;
las zonas montañosas y grandes edificaciones en las proximidades del radar, que producen
reflejos y apantallan las señales;
los vuelos a baja altitud que son enmascarados, tanto por los accidentes geográficos y grandes extensiones de agua, como por el horizonte radar debido a la curvatura de la tierra;
el tamaño y la cantidad de superficie reflexiva de las aeronaves.
El área de cobertura del radar abarca un volumen en el espacio que se extiende, desde
aproximadamente media milla del aeródromo hasta una distancia de 100 millas náuticas a una altitud determinada. En este volumen, además de las aeronaves con sus distintas formas, tamaños y capacidades de reflexión, existen otros parámetros, antes indicados, que hay que considerar tales como: zonas montañosas, precipitaciones, edificaciones, aves migratorias, vientos fuertes tráfico terrestre y marítimo, etc.
Desde el punto de vista de la claridad y distancia con que puede observarse la traza de una aeronave, provocan importantes fluctuaciones. Por este motivo, la efectividad del radar suele expresarse en probabilidades de detección, que suelen alcanzar valores, para aeronaves ligeras, entre el 75% y el 90%. PANTALLA PLANA El ambiente ATC está comenzando a cambiar rápidamente con el transcurrir de los años. Es por esto que la pantalla plana AMLCD, se puso de moda. El problema de los ingenieros es de cómo tomar ventajas de los usos que el monitor con tubo catódico (CRT) puede dar, en términos de resolución, ángulo de vista, contraste, brillo, y los requerimientos de una presentación moderna ATC pueda ser conseguidos. Paralelamente nuevas tecnologías están usando paneles planos los cuales darán cambios significativos a los diseños ergonómicos de las estaciones ATC, facilitando la carga de trabajo de los Controladores aéreos. Algunas de las presentaciones pequeñas construidas dentro de computadoras eran de 10.4 pulgadas electro luminosas de plasma o cristal (LCD). Estas tenían las ventajas de ser planas, de ser poco profundas y que usaban menos electricidad que los monitores CRT. Existen actualmente pocas tecnologías las cuales hayan podido desarrolla r nuevos avances debido a los varios inconvenientes que presentan las compañías que las producen.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
31
La tecnología predominante hoy en día es la LCD. Su desarrollo ha sido más bien rápido comparado con el CRT, el cual tiene ahora más de 100 años. Los primeros LCD fueron presentaciones pasivas y monocrómicas, con ángulo de vista pobres, falta de brillo, y de resolución en color. No fue hasta el desarrollo de cristal líquido (AMLCD), cuyo diseño inicial fue hecho en computador, ya que se vio la posibilidad de adquirir pantallas más grandes. El alto costo en el desarrollo de estas presentaciones, en términos de inversión requerido por un equipo de producción con costos altísimos, crea la inquietud de bajo volumen de producción. Afortunadamente, con la posible excepción de aplicaciones ATC de sistemas militares, los ambientes ATC han cambiado de tal manera que se han logrado corregir algunos problemas de operación.
EL SISTEMA ANTICOLISIÓN DE A BORDO (ACAS)
A medida que el tránsito aéreo es más denso aumenta el peligro de que se produzcan colisiones en
vuelo. El papel del ACAS (Air Traffic Alert and Conflict Avoidance System) consiste precisamente en evitar esos accidentes proporcionando a los pilotos información sobre las aeronaves que vuelan en su proximidad y que pueden constituir riesgo de colisión. El ACAS (denominación OACI) o TCAS (Traffic Collision Avoidance System, denominación de la FAA) es un equipo autónomo, sin dependencia de tierra, instalado a bordo de las aeronaves, es decir, independiente de los servicios ATS de tierra aunque sea un elemento auxiliar de los mismos.
El interrogador de a bordo ACAS envía interrogaciones a los respondedores SSR de las aeronaves que vuelan en su entorno y recibe las respuestas de esos respondedores. Por medio de un computador, el ACAS evalúa los datos recibidos de esas aeronaves, llamadas intrusas y determina cuales de entre ellas pueden constituir un riesgo de colisión (amenazas). A continuación, si existe la amenaza, el ACAS puede proporcionar al piloto, por medio de la presentación adecuada en el puesto de pilotaje, un <<aviso de resolución>> para indicar la maniobra (ascender, descender, mantener nivel, virar, etc.) que debería realizar la aeronave para evitar una posible colisión. Así mismo, el ACAS puede proporcionar <<avisos de tránsito>> con indicación anticipada de la posición de las aeronaves que posteriormente pudieran llegar a convertirse en amenazas y requerir avisos de resolución. Es decir, el ACAS es un equipo que permite detectar <<exclusivamente>> la presencia en sus cercanías de aeronaves equipadas con respondedores.
El sistema ACAS II utiliza el Modo S para la vigilancia de las aeronaves ya que en este modo se producen menos distorsiones y falsas alarmas que, por ejemplo, en el modo C. Permite transmitir avisos de resolución a los servicios ATS y puede coordinar con otras aeronaves equipadas con ACAS los avisos de resolución.
Los algoritmos anticolisión (secuencias lógicas) determinan las trayectorias relativas de una o varias aeronaves y deciden si constituyen o no una amenaza de colisión. Estos algoritmos trabajan con datos de aeronaves intrusas, de distancia, altitud, variación de distancia o altitud y marcación. Todos estos datos son necesarios para evaluar la amenaza, pues, por ejemplo, no es más peligrosa una aeronave que se encuentra a 3 millas alejándose que otra que se aproxima rápidamente y que se encuentra a 6 millas.
La detección de la amenaza de colisión está basada en el acercamiento simultáneo en distancia y
altitud. El ACAS utiliza estos datos de distancia y altitud para establecer las posiciones relativas de la aeronave con relación a las otras. El inconveniente radica en la ignorancia de las acciones inmediatas de las aeronaves intrusas.
¿A qué distancia vertical u horizontal considera el ACAS a las aeronaves como intrusas ? No existe una única respuesta a esta pregunta. El ACAS funciona protegiendo volúmenes alrededor suyo, los

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
32
cuales varían automáticamente de dimensiones de acuerdo con la velocidad relativa entre la propia aeronave y la intrusa. Asimismo es posible seleccionar un nivel de sensibilidad determinado, que permite evitar, por ejemplo, que en una zona terminal con tránsito aéreo intenso, donde las separaciones son más reducidas, aparezcan alertas inútiles. El control de sensibilidad puede seleccionarse desde una estación en tierra que envíe a través del Modo S interrogaciones que contengan mensajes con control de sensibilidad, o por el piloto a bordo de la aeronave. Las configuraciones del ACAS son las siguientes: • ACAS I. Proporciona exclusivamente avisos de tránsito. Equipo mínimo Modos A y C. • ACAS II. Proporciona avisos de tránsito (TA,s) y de resolución (RA,s) en el plano vertical. Equipo mínimo Modo S. • ACAS III. Proporciona avisos de tránsito y de resolución en el plan horizontal y vertical. Esta configuración todavía está en pruebas.
Por último, indicaremos que la presentación del ACAS en la cabina de la aeronave puede adoptar diferentes formas, por ejemplo: • integrado en el sistema electrónico de instrumentos de vuelo (EFIS) donde, si se presenta cualquier incidente, en el EFIS se mostrará un aviso de alarma con indicación de la acción evasiva que se debe seguir: picado o encabritamiento acompañado de señales auditivas. • integrada en el variómetro de velocidad instantánea con luces para indicar ascensos o descensos, • el de una pantalla catódica en colores o no, cuyo centro representa la aeronave, y alrededor de ella se encuentran las aeronaves intrusas y las amenazas. En algunas pantallas, las aeronaves intrusas adoptan el color en función del grado de la amenaza. • como método más sofisticado, sintetizadores de voz que ordenen la acción evasiva que se debe seguir.
Además de los derivados de los riesgos de interferencias en zonas de alta densidad de tránsito y de los relativos a las acciones coordinadas de pilotos y controladores, los problemas del ACAS se centran en el elevado numero de TA,s y RA,s que, dependiendo de la zona de vuelo y la altitud, se registran a bordo de las aeronaves, que podrían ocasionar en las tripulaciones desconfianza o confusiones, sobre todo volando a baja altitud.
Para solucionar estos problemas, en los ACAS de última generación se han efectuado cambios en el software que además de reducir substancialmente el numero global de TA,s y RA,s evita, por ejemplo, las alarmas por debajo de 1.000 pies e impide o suaviza los cambios bruscos de actitud que pueden ser obligadas a efectuar aeronaves en descenso, alertadas por aeronaves en rápido ascenso autorizadas a niveles inferiores. Recuerde comunicar al ATC las desviaciones debidas a RA,s. SISTEMAS DE ALARMA BASADOS EN TIERRA
Para ayudar a los controladores a realizar su trabajo, existe una serie de sistemas de predicción de conflictos entre los que destacamos los que permiten: • avisar de la probabilidad de conflictos o de una disminución de las adecuadas mínimas de separación (STCA, Short Term Conflict Alert), el sistema actúa con anticipaciones entre 1 y 2 minutos;

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
33
• alertar sobre los vuelos por debajo de la altitud mínima de seguridad (MSAW, Minimum Safe Altitude Warning); • avisar sobre desviaciones de las trayectorias nominales; • alertar sobre la entrada de aeronaves no autorizadas en determinados espacios aéreos.
En Estados Unidos, la FAA utiliza el sistema de automatización avanzada de la organización del tránsito aéreo (ETMS), que incluye el sistema de presentación de la situación de aeronaves (ASD) y la función de vigilancia y alerta (MA) que se actualiza aproximadamente cada 5 minutos y presenta automáticamente los problemas relativos a las aglomeraciones de tránsito aéreo. Capacidades de los Sistemas Radar Los sistemas radar empleados para proporcionar servicios de tránsito aéreo habrán de tener un nivel muy elevado de fiabilidad, disponibilidad e integridad. Será muy remota la posibilidad de que ocurran fallas del sistema o degradaciones importantes del sistema que pudieran causar interrupciones completas o parciales de los servicios. Se proporcionarán instalaciones de reserva. Los sistemas Multiradar, son sistemas que emplean más de un sensor radar y deberían tener la capacidad de recibir, procesar y presentar en pantalla, de forma integrada, los datos procedentes de todos los sensores conectados. Deberían igualmente ser capaces de integrarse a otros sistemas automatizados que se emplean en el suministro de los servicios ATS. (véase Doc.4444 Gestión del Tránsito Aéreo -PANS/ATM-Capítulo 8, 8.1 y siguientes).
RADAR EN LOS SERVICIOS DE TRÁNSITO AÉREO
Identificación Radar
Antes de suministrar servicio radar a una aeronave, deberá establecerse su identidad radar por medio de cualquiera de los siguientes métodos de identificación:
Radar Primario (PSR) Radar Secundario (SSR)
Radar primario
Aunque puede aplicarse también para el radar SSR, este tipo de identificación corresponde fundamentalmente a la efectuada con el PSR donde se utilice. a) Relacionando una determinada traza radar (eco) con una aeronave que notifica su posición sobre un punto prescrito que aparezca en el mapa radar, o bien como azimut y distancia respecto a dicho punto, y comprobando que el desplazamiento de la traza en cuestión concuerda con la trayectoria de la aeronave o con el rumbo notificado. b) Dando instrucciones al piloto para que haga uno o más cambios de rumbo, siendo normalmente cada viraje de 30º o más, y relacionando los movimientos de una determinada traza radar con la ejecución de las instrucciones de las cuales la aeronave haya acusado recibo; o relacionando los movimientos de una determinada traza radar con las maniobras que ejecute una aeronave que así lo ha notificado.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
34
c) Relacionando la posición de una traza radar observada con la posición de una aeronave (con una precisión de 9,4 Km (5 NM), obtenida por triangulación radiogoniométrica y comprobando que el desplazamiento de la traza radar concuerda con el rumbo notificado de la aeronave. d) Relacionando una traza con una aeronave que se sabe que acaba de despegar, a condición de que la identificación se efectúe dentro de 2Km (1NM) a partir del extremo de la pista utilizada. e) Por transferencia de la identidad radar. Para facilitar la identificación deberían utilizarse, marcaciones radiogoniométricas, para establecer la identidad radar. Radar secundario a) Utilizando el dispositivo de identificación especial de posición (SPI), aunque hay que utilizarlo con precaución ya que la cobertura excesiva causada por la propagación irregular de las ondas en ciertas condiciones meteorológicas puede ocasionar respuestas de tipo SPI que tengan su origen en áreas fuera del alcance de la pantalla del controlador. También las solicitudes simultáneas de SPI dentro de la misma zona pueden dar lugar a errores de identificación. b) Cumpliendo las instrucciones relativas a la elección de una clave determinada. c) Cumpliendo las instrucciones relativas al cambio de modo. d) Reconociendo una clave individual asignada, cuya selección haya sido verificada. e) Cuando no se disponga de otros medios dar instrucciones para que se conmute el respondedor de la posición ON a STANBY y nuevamente a ON.
TRANSFERENCIA DE IDENTIDAD RADAR
La transferencia de identidad de una traza radar de un controlador radar a otro sólo se debe
intentar cuando se considere que la aeronave se encuentra dentro de la cobertura de la presentación radar del controlador que acepta la transferencia.
Los métodos utilizados en función de las instalaciones y medios de que dispone el controlador son los siguientes:
Transferencia con radar primario
Transferencia con radar secundario Transferencia con Radar primario a) Designación directa de la traza radar (señalando con el dedo), si están adyacentes las dos presentaciones radar o si se usa una presentación radar común del tipo conferencia. b) Designación de la traza por referencia a una marcación y a una distancia respecto a una posición geográfica o instalación de navegación, completada por la observación del desplazamiento de la traza radar. c) Designación de la traza mediante una señal o símbolo electrónico alrededor de la traza, siempre que con esto se indique la única traza radar y no haya duda posible acerca de su correcta identificación.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
35
Transferencia con Radar secundario a) Indicación a la aeronave, por parte del controlador transferidor, para que cambie de clave, y observación del cambio por el controlador aceptante. b) Indicación a la aeronave, por parte del controlador transferidor, para que accione el dispositivo SPI, y observación de esta respuesta por el controlador aceptante. c) Notificación de la clave individual de la aeronave. PROBLEMAS ASOCIADOS AL SSR Algunos de los problemas de utilización del radar secundario son comunes a los del primario, pero en concreto los que se refieren a la utilización del modo A/C, son los siguientes: a) Confusión en los códigos debido al solapamiento en las respuestas de aeronaves muy próximas en acimut y distancia, pudiendo resultar de esta forma claves falsas. b) Respuesta no sincronizada, resultando interferencias en un interrogador ocasionadas por las respuestas de un respondedor y que se encuentra en contacto con otro interrogador. Es decir, interferencias causadas por el funcionamiento de varias estaciones terrestres SSR próximas. c) Disponibilidad de sólo 4096 claves en el Modo A para identificación de aeronaves. d) Apantallamiento de la antena debido al comportamiento de la aeronave.
LOS SERVICIOS RADAR Los servicios proporcionados con la ayuda del radar son los siguientes:
1. Servicio de Control radar
2. Servicio de Información radar
3. Servicio de Vigilancia
La información obtenida en una presentación radar puede usarse para llevar a cabo las siguientes funciones en cuanto al suministro del servicio de control de tránsito aéreo: a) Mantener vigilancia sobre la marcha de los vuelos, a fin de proporcionar a la dependencia de control de tránsito aéreo de que se trate:
Una mayor información de la posición de las aeronaves que están bajo control. Información suplementaria respecto a otro tránsito Información cobre cualesquiera desviaciones significativas, por parte de las aeronaves,
respecto a los términos de sus autorizaciones de control de tránsito aéreo. b) Proporcionar guía vectorial radar, que consiste en proporcionar indicaciones para conducir a una aeronave por itinerario diferente a los establecidos, a:
Las aeronaves que salen, a fin de facilitar la subida hasta el nivel de crucero.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
36
Las aeronaves en ruta, con objeto de resolver posibles incompatibilidades de tránsito, o para ayudar a las aeronaves en la navegación, dirigirlas a una radioayuda de navegación o alejarlas de ella, por ejemplo para mantenerlas fuera de zonas de mal tiempo.
Las aeronaves que llegan para separaciones de tránsito. c) Proporcionar separación y mantener la marcha normal de tránsito aéreo cuando una aeronave tenga fallo de comunicaciones dentro del área de cobertura radar. d) Mantener comprobación radar del tránsito aéreo, con el fin de proporcionar a las aeronaves interesadas información o asesoramiento sobre cualquier desviación importante respecto a lo estipulado en las correspondientes autorizaciones de control de tránsito aéreo, incluso las rutas autorizadas. Información de posición
Se debe informar de su posición a las aeronaves bajo control radar, en las siguientes circunstancias: a) Cuando se identifiquen por primera vez, excepto cuando la identificación se basa en un informe del piloto acerca de la posición de la aeronave o se haya determinado dentro de un radio de 1 NM de la pista, a la salida. b) Cuando la aeronave pida esta información. c) Cuando un valor estimado por la aeronave difiere significativamente de la estimación de controlador, basada en la observación radar. d) Cuando la aeronave reanude su propia navegación después de haber estado bajo guía vectorial radar.
La información de posición se transmite a la aeronave de la forma que se indica a continuación:
Como una posición geográfica conocida. Dando dirección y distancia a una posición conocida. Indicando derrota magnética y la distancia hasta un punto importante, ayuda para la
navegación en ruta o ayuda para la aproximación. Distancia al punto de toma de contacto, si la aeronave está en aproximación final. Distancia y dirección desde el eje de una ruta ATS.
Guía vectorial radar
Para ser utilizadas por el ATC, principalmente en áreas de mucha actividad, existen cartas para guía vectorial radar. En ellas, se establecen diferentes sectores con las altitudes mínimas a las que, en ellos, se puede descender a las aeronaves. Normalmente estas altitudes mantienen el compromiso de las altitudes mínimas de sector. No obstante, debido a la capacidad que tiene el radar de poder aislar y situar exactamente los obstáculos prominentes, estas altitudes mínimas pueden en ocasiones ser inferiores a las MEA, MOCA, etc.
Cuando el controlador proporcione guía vectorial a una aeronave, deberá dar cumplimiento a lo siguiente: a) Siempre que sea factible, deberá guiarse a la aeronave a lo largo de rutas en las que el piloto pueda efectuar su propia navegación, o verificarla de cuando en cuando con referencia a ayudas de navegación

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
37
interpretadas por el piloto (esto reducirá a la mínima la ayuda radar requerida para la navegación y atenuará las consecuencias de un fallo radar). b) Cuando se da a una aeronave un vector que la desvía de una ruta previamente asignada, deberá informarse a ésta, a menos que ello sea evidente, de lo que se trata de conseguir con el vector en cuestión y, siempre que sea posible, debiera especificarse el límite de tal vector. c) Cuando una aeronave haya notificado que no puede confiar en sus instrumentos indicadores de dirección, antes de expedir instrucciones de maniobra deberá pedirse a la aeronave que haga todos los virajes a una velocidad angular convenida y que dé cumplimiento a las instrucciones inmediatamente que las reciba. d) Cuando el controlador radar esté proporcionando guía vectorial a un vuelo IFR, se asegurará de que , en todo momento. Hasta que la aeronave llegue a un punto en que el piloto reanude su propia navegación, haya un margen vertical adecuado sobre el terreno, ya que cuando se está proporcionando guía vectorial a un vuelo IFR, el piloto a menudo es incapaz de determinar su posición exacta y, por ende, su margen vertical sobre el terreno. Recuerde, como ya se ha indicado, que entre los objetivos del control de tránsito aéreo, no figura la prevención de las colisiones con el terreno, excepto cuando un vuelo IFR es guiado ‘por vectores radar. e) Al terminar la guía vectorial de una aeronave, el controlador informará de ello a la aeronave para que ésta reanude su propia navegación, dándole su posición e instrucciones apropiadas, según sea necesario, si las instrucciones actuales han desviado a la aeronave de la ruta previamente asignada.
LA SEPARACIÓN RADAR
La aplicación de la separación mínima radar es responsabilidad del controlador. Sin embargo, en determinadas circunstancias, la separación mínima establecida se modifica en función de las limitaciones técnicas del radar. En efecto, si la velocidad de barrido es lenta, el controlador tardará más tiempo en poder observar los ecos correspondientes a las aeronaves y si no se toman medidas al respecto, sobre todo en el caso de aeronaves a gran velocidad, se podría llegar a sobrepasar la distancia mínima.
Otros factores que también podrían influir para que fuera necesario ampliar las mínimas de separación son la anchura del haz, la distancia y la duración de los impulsos. La anchura del haz y la distancia pueden producir que sobre la pantalla se lleguen a tocar dos ecos y si el tiempo de duración del impulso es pequeño resultan ecos muy débiles y en ocasiones difíciles de distinguir.
Asimismo pueden influir la densidad del tránsito aéreo y la carga de las comunicaciones. En el caso de que exista una gran densidad de tránsito la capacidad de los controladores puede disminuir y si no es posible comunicar con rapidez con las aeronaves controladas por radar normalmente será necesario aumentar la separación.
APLICACIÓN DE LA SEPARACIÓN
Los factores que el controlador radar debe tener en cuenta, al determinar el espaciado que hay que aplicar en determinadas circunstancias para garantizar que no se viola la separación mínima, comprenden los rumbos y velocidades relativos de las aeronaves, las limitaciones técnicas del radar, el volumen de trabajo del controlador y toda dificultad ocasionada por la congestión de las comunicaciones. Al aplicar los controladores estas separaciones deberán cumplirse los siguientes requisitos:

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
38
a) Únicamente se aplicarán entre aeronaves identificadas cuando existe seguridad razonable de que se mantendrá la identificación. b) Excepto cuando se haya de efectuar una transferencia de control radar, un controlador radar establecerá separación no radar antes de que una aeronave bajo control radar llegue a los límites de su área de responsabilidad o antes de que la aeronave salga de su área de cobertura radar. c) Cuando la separación radar se base en la utilización del radar primario, se aplicará de tal manera que la distancia entre los centros de las trazas radar, que presentan las posiciones de las aeronaves en cuestión, nunca sea inferior al mínimo prescrito. d) Cuando se emplee la traza de radar primario de una aeronave y la respuesta SSR de otra aeronave para establecer separación entre las mismas, se aplicará tal separación de manera que, en la presentación, la distancia entre el centro de la traza de radar primario y el borde más cercano de esta traza al elemento de posición de la respuesta SSR, no sea en ningún momento inferior a un mínimo especificado. e) Cuando el sistema SSR tenga suficiente precisión para localizar la posición de una aeronave en el centro de la respuesta SSR, y con tal que el procedimiento haya sido previamente aprobado por la autoridad ATS competente, puede aplicarse la separación utilizando el centro de la respuesta SSR; no obstante, sigue siendo aplicable lo contenido en el apartado d) relativo a la superposición de ecos y de respuestas. f) En el caso de que a un controlador radar se le notifique que un vuelo está entrando o se dispone a entrar en el espacio aéreo dentro del cual se aplica separación radar, pero no haya identificado a la aeronave mediante radar, dicho controlador puede, si así lo prescribe la autoridad competente, continuar facilitando servicio radar a las aeronaves identificadas siempre que:
El vuelo controlado no identificado se realice por una aeronave de un tipo que puede esperarse que dé una indicación adecuada en el radar primario en el espacio aéreo dentro del cual se aplicará la separación radar y
La separación radar se mantenga entre los vuelos controlados por radar y todas las demás trazas observadas hasta que se haya identificado el vuelo controlado no identificado o se haya establecido separación no radar.
Los procedimientos de separación radar detallados deberán emplearse con suma cautela por parte del controlador radar, teniendo presente la conveniencia de disponer de comunicación oral directa inmediata con la aeronave controlada no identificada, por lo menos cuando entre en el área de jurisdicción del controlador radar.
g) La separación radar puede aplicarse entre una aeronave que despegue y una que la preceda en la salida o entre aquellas y otros tránsitos controlados por radar, a condición de que haya seguridad razonable de que la aeronave que sale se identificará dentro de un radio de 2 Km ( NM) a partir del extremo de la pista y que, en aquel momento, existirá la separación requerida. h) La separación radar no se aplicará entre aeronaves que hagan la espera sobre la misma ayuda de navegación.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
39
DEFINICIONES Asistencia radar. El empleo del radar para proporcionar a las aeronaves información y asesoramiento sobre desviaciones significativas respecto a la trayectoria nominal de vuelo. Anule respuesta Charlie. Utilizado por el ATC para solicitar de una aeronave que interrumpa la transmisión relativa a la altitud de presión debido a funcionamiento defectuoso. (Normalmente variaciones de más de 300 pies). Aeronave amenaza. Aeronave intrusa respecto a la cual la lógica de detección de amenazas del sistema ACAS ha determinado la necesidad de un aviso de resolución. Aeronave intrusa. Toda aeronave equipada con respondedor seguida por un sistema ACAS. ACAS. (Sistema anticolisión de a bordo). Sistema instalado a bordo que permite la detección y seguimiento de las aeronaves que evolucionan en las proximidades de la aeronave equipada con dicho sistema; que señala la presencia de aeronaves que constituyen una amenaza de colisión, y que aconseja a las aeronaves la ejecución de maniobras con vistas a resolver el conflicto, de manera que sea posible conseguir la separación de seguridad necesaria entre aeronaves en situación conflictiva. Aviso de resolución. Indicación proporcionada visualmente a la tripulación de vuelo , recomendando alguna maniobra para aumentar la separación de alguna aeronave amenaza. Clave SSR. Número asignado a una determinada señal de respuesta de impulsos múltiples transmitida por un respondedor. Confirme respuesta SSR. Expresión utilizada por el ATC para pedir al piloto de una aeronave que vuelva a seleccionar el modo y código asignado. Contacto radar. Situación que existe cuando la traza radar o el símbolo de posición radar de determinada aeronave se ve e identifica en una presentación radar. Se utiliza por el ATC para informar a una aeronave que ha sido identificada sobre la pantalla radar, a partir de este momento el piloto, normalmente, no está obligado a notificar sobre puntos de posición. Conflicto. Convergencia prevista de aeronaves en el espacio y en el tiempo que constituye una infracción de determinado conjunto de mínimos de separación. Corte respondedor. Utilizado por el ATC para solicitar de una aeronave la terminación del respondedor. Eco radar. Indicación visual en una presentación radar de una señal radar reflejada desde un objeto. Ecos parásitos radar. Señales parásitas en una presentación radar. Enlace de datos . Terminales y circuitos de interconexión que permiten la transmisión de datos entre las terminales. Fallo / Falla. Defecto de un dispositivo que le impide actuar del modo requerido dentro de una gama determinada de condiciones ambientales. Guía vectorial radar. Suministro a las aeronaves de guía para la navegación en forma de rumbos específicos basados en la observación de una presentación radar.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
40
Interrogador. Transmisor receptor de un sistema SSR situado en tierra. Mapa radar. Información superpuesta en una presentación radar para proporcionar indicación directa de datos seleccionados. Modo SSR. Letra o número asignado a un espacio específico de impulsos de las señales de interrogación transmitidas por un interrogador. Existen cuatro modos que corresponden a cuatro espaciados diferentes de impulsos de interrogación. Modo S. Radar secundario de vigilancia (SSR) mejorado que permite interrogar a todas las aeronaves equipadas con SSR, hacer la interrogación dirigida de todas las aeronaves debidamente equipadas y hacer el intercambio bidireccional de datos numéricos entre esas aeronaves y el interrogador. Nivel de sensibilidad. Selección de un volumen de protección utilizado por la lógica de detección de amenaza del sistema ACAS. Posición de seguimiento radar. Extrapolación de la posición de una aeronave que hace el computador a base de información radar y que utiliza el propio computador para fines de seguimiento, Presentación radar. Presentación electrónica de información derivada del radar que representa la posición y movimiento de las aeronaves. Radar. Dispositivo radioeléctrico para la detección que proporciona información acerca de distancia, acimut y/o elevación de objetos. Radar de precisión para la aproximación (PAR). Equipo de radar primario usado para determinar la posición de una aeronave durante la aproximación final, en acimut y elevación en relación con una trayectoria nominal de aproximación y en distancia en relación con un punto de toma de contacto. Radar primario. Sistema de radar que usa señales de radio reflejadas. Radar secundario. Sistema de radar en el cual la señal radioeléctrica transmitida por la estación radar inicia la transmisión de una señal radioeléctrica de otra estación. Radar secundario de vigilancia (SSR). Sistema de radar secundario en el que se utilizan transmisores receptores terrestres (interrogadores) y respondedores de a bordo que se ajustan a las especificaciones preparadas por la OACI: Radar y vigilancia. Equipo de radar utilizado para determinar la posición en distancia y acimut de las aeronaves. Reanude su navegación. Expresión utilizada por el ATC para solicitar del piloto que reanude (reasuma) su responsabilidad de navegar. Se utiliza, normalmente, cuando ha finalizado la provisión de vectores radar o cuando se pierda el contacto radar. Respondedor. Emisor receptor que genera una señal de respuesta cuando se le interroga debidamente; la interrogación y la respuesta se efectúan en frecuencias diferentes. Respuesta radar (respuesta SSR). La indicación visual en forma asimbólica en una presentación radar, de una señal transmitida por un objeto en respuesta a una interrogación.

FUNDAMENTOS RADAR
RECOPILO CARLOS ALBERTO URIBE ROZO INSTRUCTOR ATS
41
Rumbo radar. Rumbo magnético dado por un controlador a un piloto, basándose en la información obtenida por radar, con el fin de que le sirva de guía para la navegación. Respondedor Modo S. Equipo instalado a bordo que produce determinadas respuestas a las interrogaciones en Modos S y A/C. Separación radar. La separación utilizada cuando la información de posición de la aeronave se obtiene de fuentes radar. Servicio radar. Término utilizado para designar un servicio proporcionado directamente por medio del radar. Servicio radar terminado. Expresión utilizada por el ATC para informar al piloto de la finalización de la provisión del servicio radar. Símbolo de posición radar. Expresión genérica que sirve para la indicación visual, en forma simbólica, en una presentación radar, de la posición de una aeronave obtenida después del tratamiento por computadora digital de datos de posic ión derivadas del radar primario y/o del SSR. En la actualidad, con el fin de lograr el máximo aprovechamiento del espacio aéreo disponible y compartir el tiempo dinámicamente, ya se ha comenzado a aplicar la vigilancia, como base del próximo futuro concepto ATM, por medio de las siguientes técnicas
radar secundario de vigilancia Modo S.;
vigilancia dependiente automática (ADS); y
sistema anticolisión de a bordo (ACAS). Software (Soporte lógico). Conjunto de programas, procedimientos y quizás la documentación correspondiente, relativos al funcionamiento de un sistema de tratamiento de datos. Terminal. Dispositivo equipado normalmente con un teclado y algún tipo de pantalla capaz de enviar y recibir información por un canal de comunicación. Tiempo de respuesta. Lapso transcurrido entre la gestación de una pregunta en una terminal y la recepción de la respuesta en la misma terminal. Tiempo real. Se refiere al modo de funcionamiento de un sistema en que los instantes de aparición de muchos acontecimientos en el sistema se ajustan a restricciones determinadas por la aparición de acontecimientos en otro sistema independiente. Técnica del monoimpulso. Técnica radar en la cual se puede derivar información de acimut de una aeronave equipada con respondedor SSR, a partir de cada detección de impulso, comparándola con las señales recibidas simultáneamente en dos o más haz de antena. Bibliografía Doc.9426 OACI Doc.2000-1 Reglamentación radar Colombia