EtátiEstática 1 Equilibrio1.Equilibrio 2.Centros de ggyravedad y...
30
E táti Estática 1 Equilibrio 1.Equilibrio 2.Centros de gravedad y 3.Momentos de inercia
Transcript of EtátiEstática 1 Equilibrio1.Equilibrio 2.Centros de ggyravedad y...
-
E tátiEstática
1 Equilibrio1.Equilibrio2.Centros de gravedad y g y3.Momentos de inercia
-
Parte de la física que estudia el equilibrio de los cuerpos
Parte de la física que estudia las relaciones existentesentre las fuerzas que actúan en un cuerpo para que seencuentre en equilibrioencuentre en equilibrio
-
Un punto está en equilibrio si la resultante de lasUn punto está en equilibrio si la resultante de lasfuerzas aplicadas es nula
0=ΣFUn sólido/sistema está en equilibrio si 1) la resultantede las fuerzas aplicadas es nula y 2) el momentoresultante de las fuerzas aplicadas es nuloresultante de las fuerzas aplicadas es nulo
0=ΣF 0=ΣM0=ΣF 0ΣM
-
00 1 =−=∑ FfF sx
∑ 0 0y nF F P= − =∑
P0M∑ 0OM =∑
Imágenes: ©2004 Física. Tipler-Mosca by W.H. Freeman and Company
-
En el equilibrio la resultante Si la resultante de lasEn el equilibrio la resultantede las fuerzas aplicadas esnula
Si la resultante de lasfuerzas aplicadas esconservativa, se puedeexpresar por
0FΣ = F U= −∇∑0FΣ F U= ∇∑
En las posiciones de equilibrio la energía potencial debe sermáxima o mínimamáxima o mínima
-
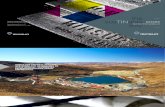
Si al separarse de la posición de equilibrio, el sistemaretorna a dicha posición, el equilibrio es estable
Si al separarse de la posición de equilibrio el sistema seSi al separarse de la posición de equilibrio, el sistema sealeja cada vez más de dicha posición el equilibrio esinestable
Si l d l i ió d ilib i l i t iSi al separarse de la posición de equilibrio el sistema sigueestando en una posición de equilibrio análoga a la inicial elequilibrio es indiferenteequilibrio es indiferente
-
Estable InestableIndiferente
Equilibrio estable → Energía potencial mínimaq g p
Equilibrio inestable → Energía potencial máxima
l b d f í lEquilibrio indiferente → Energía potencial constante
-
Estable Inestable IndiferenteEstable Inestable Indiferente
Imágenes: ©2004 Física. Tipler-Mosca by W.H. Freeman and Company
-
El centro de gravedad de un sistema de puntos materiales (oólid ) l t d l i l idun sólido) es el punto del espacio en el que se considera que
está aplicado el peso.
Es un punto único, independiente de la posición y orientaciónp p p ydel sólido
G•G
GG
-
Cada partícula i del sistema, está situada en un punto ded d ( ) i d f icoordenadas (xi, yi, zi) respecto a un sistema de referencia
cartesiano, y tiene un peso pi.ZZ
mi(xi, yi, zi)
Pi
Y
zi
Y
xiy
X
yi
-
El centro de gravedad de un sistema, es un punto del espacio en elque se puede considerar que está aplicada la resultante de lospesos de cada una de las partículas que constituyen el sistema.
Z Z• Gp2 p3
p4
• G
X
Yp1pn
X
YP
X X
Sistema 1 (n pesos) = Sistema 2 ( resultante de los n pesos)
-
El sistema constituido pon n n∑pesos, se puede sustituir por el
peso resultante aplicado en elcentro de gravedad y la
1 1 1
1
...
...
i in n i
G nn
i
m xm x m xx
m m m
=+ += =+ +
∑
∑centro de gravedad, y laresultante y el momentoresultante es el mismo
1i
im
=∑
n
∑resultante es el mismo
El centro de gravedad G está
1 1 1
1
...
...
i in n i
G nn
i
m ym y m yy
m m m
=+ += =+ +
∑
∑El centro de gravedad G estásituado en un punto decoordenadas (xG, yG, zG) respecto
1i
i
m=∑
n
m z∑G G Ga dicho sistema de referencia yen él se aplica la resultante det d l P
1 1 1
1
...
...
i in n i
G nn
m zm z m zz
m m m
=+ += =+ +
∑
∑todos los pesos P1
ii
m=∑
-
M
Z
1Mdm
1G
L
x xdmM
= ∫L
L
1Y
z
r 1G
L
y ydmM
= ∫Y
x
L
1X
y 1G
L
z zdmM
= ∫L
-
Z
1
dA A
M 1G
A
x xdmM
= ∫∫dA A A
1∫z
Y
1G
L
y ydmM
= ∫Y
x1 d∫
X
y GL
z zdmM
= ∫
-
Z1
M1
Gx xdmM= ∫∫∫
dV v
1∫∫∫
z
r1
Gv
y ydmM
= ∫∫∫Y
x 1 d∫∫∫X
y Gv
z zdmM
= ∫∫∫
-
El área generada cuando una curva plana y homogénea giraen torno a un eje contenido en su plano, pero que no lacorta es igual a la longitud L de la curva por la longitud de lacircunferencia que describe el centro de gravedad al girarcircunferencia que describe el centro de gravedad al girar
A BLyG Xω
A BLyG XX X
La curva AB, de longitud L, al gira en torno a X describe una circunferencia de radio yG: A= 2πyG·L
-
El volumen generado cuando una superficie plana yh é i j id lhomogénea gira en torno a un eje contenido en su plano, peroque no la corta es igual al área de la superficie por la longitudde la circunferencia que describe el centro de gravedad al girarde la circunferencia que describe el centro de gravedad al girar
y ωyGyG ω
X
La superficie, de área A, al gira en torno a X describe una circunferencia de radio yG: V= 2πyG·A
-
v rω=i iv rω=
2 2 2 2 21 1 1n n nE m v m r m rω ω= = =∑ ∑ ∑1 1 12 2 2
C i i i i i ii i i
E m v m r m rω ω= = =
= = =∑ ∑ ∑
∑n
rmI 221
2C ejeE I ω=
∑=
=i
iieje rmI1
-
2 2 2 2( )n n
I m r m x y z= = + +∑ ∑1 1
( )O i i i i i ii i
I m r m x y z= =
= = + +∑ ∑n
Z
2
1
n
YOX i ii
I m z=
= ∑ mi(xi, yi, zi)
2n
I m x=∑ ri1
YOZ i ii
I m x=
= ∑ ziY
i
2n
XOZ i iI m y=∑ xiY
1i= yiX
-
El momento de inercia respecto a un punto es la suma deEl momento de inercia respecto a un punto es la suma delos momentos de inercia respecto a tres planosperpendiculares entre sí que se corten en dicho punto
O XOY XOZ YOZI I I I= + +O XOY XOZ YOZEl momento de inercia respecto a un punto es la semisumade los momentos de inercia respecto a tres ejesde los momentos de inercia respecto a tres ejesperpendiculares entre sí que se corten en dicho punto
1 ( )2O OX OY OZ
I I I I= + +2
-
El momento de inercia respecto a un punto es la suma delp pmomento de inercia respecto a un eje y el momento deinercia respecto a un plan perpendicular a él que se corten endicho punto
I I I I I I I= + = + = +O OZ XOY OY XOZ OX YOZI I I I I I I= + = + = +
El momento de inercia respecto a un eje es la suma de losEl momento de inercia respecto a un eje es la suma de losmomentos de inercia respecto a los dos planosperpendiculares entre sí que se corten en dicho ejeperpendiculares entre sí que se corten en dicho eje
OX XOY XOZI I I= + OY XOY YOZI I I= + OZ XOZ YOZI I I= +OX XOY XOZ OY XOY YOZ OZ XOZ YOZ
-
Si la figura está en el plano YOZ Z
0YOZI =Y
OX XOY XOZI I I= +
YOZ
X
Y
OY XOYI I=O YOZ OX OXI I I I= + =
X
OZ XOZI I= O XOY OZI I I= +
1 ( )O OX OY OZ OY OZI I I I I I= + + = +O XOZ OYI I I= +
( )2O OX OY OZ OY OZ
-
En una figura plana, el momento de inercia respecto a ung p , ppunto es la suma de los momentos de inercia respecto a dosejes perpendiculares entre sí, contenidos en el plano, que se
t di h tcortan en dicho punto
En una figura plana el momento de inercia respecto a unEn una figura plana, el momento de inercia respecto a unpunto es igual al momento de inercia respecto a un ejeperpendicular a la figura, que pase por dicho puntoperpendicular a la figura, que pase por dicho punto
En una figura plana, el momento de inercia respecto a un ejecontenido en el plano, es igual al momento de inercia respectoa un plano perpendicular a él que le corte en dicho ejea un plano perpendicular a él que le corte en dicho eje
-
Respecto a las rectas OX, OY
Y
minn
XY i i iP m x y=∑yi
X
1i=
xi
-
Z
21O GI I Md= +
G
d1
YO
XEl momento de inercia respecto a un punto O es la suma del momento deinercia respecto al centro de gravedad G y de la masa total del sistema porp g y pel cuadrado de la distancia que separa los puntos G y O
-
Z d2Z
G2I I Md 22OZ GZI I Md= +
YO
X El momento de inercia respecto a un eje cualquiera (OZ) es la suma delmomento de inercia respecto a un eje paralelo que pase por el centro degravedad G (Eje CZ) y la masa total del sistema por el cuadrado de lagravedad G (Eje CZ) y la masa total del sistema por el cuadrado de ladistancia que separa los dos ejes
-
Z
G 23XOY XGYI I Md= +
G
YOd3
X
Y
El momento de inercia respecto a un plano cualquiera (XOY) es la suma delmomento de inercia respecto a un plano paralelo que pase por el centro de
d d G (Pl XGY) l t t l d l i t l d d d lgravedad G (Plano XGY) y la masa total del sistema por el cuadrado de ladistancia que separa los dos planos
-
El momento de inercia respecto a un punto, eje o plano es
igual al momento de inercia respecto a un punto eje oigual al momento de inercia respecto a un punto, eje o
plano paralelo al anterior y que pase por el centro de
gravedad, mas la masa total del sistema por el cuadrado de
la distancia que separa ambos puntos, ejes o planos