Ética Para Robots_IC411

of 6
-
Upload
antoniogarciasocuellamos -
Category
Documents
-
view
216 -
download
0
Transcript of Ética Para Robots_IC411
-
7/25/2019 tica Para Robots_IC411
1/656 INVESTIGACION YCIENCIA,diciembre, 2010
Un escenario apocalptico clsicode la ciencia ficcin es aquel enque las mquinas adquieren in-teligencia y, carentes de reparosmorales, se lanzan a nuestra des-
truccin. Desde luego, los robots actuales sedisean con la finalidad de ayudarnos. Pero,
por extrao que parezca, son numerosos losdilemas ticos a los que un robot puede llegara enfrentarse.
Imagine por un momento ser residente deun geritrico, lugar donde los robots no tar-darn en convertirse en una ayuda habitual.Son casi las 10 de la maana y usted le pideal robot asistencial que le traiga el mandodel televisor, ya que desea ver las noticias.Otro residente, sin embargo, desea ver unconcurso. El robot opta por entregarle a l elmando. Usted se queja, pero el robot le explicaque, el da anterior, fue usted quien tuvo la
oportunidad de ver su programa favorito. Estaancdota plantea una situacin corriente querequiere una decisin tica, algo de dificultadextraordinaria para una mquina.
Si bien el supuesto descrito es an hipo-ttico, hemos logrado disear lo que, hastadonde sabemos, constituye el primer modelode un robot capacitado para adoptar decisio-nes similares. Nuestra mquina cuenta conun principio tico al que recurre para deter-minar con qu frecuencia ha de recordarle aun enfermo que debe tomar su medicacin.Su programacin le permite elegir entre unas
pocas opciones, como seguir recordndole al
paciente qu medicamento debe tomar y cun-do ha de hacerlo, o bien aceptar su negativasi el paciente rehsa.
Resulta harto difcil, si no imposible, pre-ver todas las decisiones que un robot habrde tomar y programarlo para que reaccionede la manera deseada en todas las situacio-
nes concebibles. Por otra parte, impedir deforma sistemtica que un robot acte antecualquier situacin con implicaciones ticas leimpedira realizar numerosas tareas de enormeutilidad.
La solucin pasa por disear robots capacesde aplicar principios ticos en situaciones nue-vas e imprevistas. Adems, este enfoque ofrecela ventaja de que los robots podran aludir adichos principios si hubieran de justificar sucomportamiento, algo esencial para que loshumanos se sientan cmodos junto a ellos.Por ltimo, el diseo de robots dotados de
principios ticos podra conducir a avances enel campo de la tica, ya que obligara a los fil-sofos a replantearse los fundamentos ticos denumerosas situaciones cotidianas. En palabrasde Daniel C. Dennett, profesor de filosofa dela Universidad Tufts: La inteligencia artificialfuerza a la filosofa a ser honesta.
Yo, robotLos robots autnomos no tardarn en integrar-se en nuestras vidas. Ya existen aviones quevuelan solos y automviles autoguiados en fasede desarrollo. Tambin los hogares inteligentes,
gobernados por ordenadores que controlan
CONCEPTOS BASICOS
Robots que tomen decisiones
autnomas, como los disea-
dos para auxiliar a personas
mayores, pueden tener que
afrontar dilemas ticos incluso
en situaciones cotidianas.
Una forma de aceptar el
comportamiento de los robots
consistira en programarlos con
principios ticos generales y
dejar que, en cada caso, toma-
sen decisiones basadas en tales
principios.
La inteligencia artificial permite
que, mediante inducciones
lgicas, una mquina abstrai-
ga tales principios a partir de
casos concretos de conductas
ticamente aceptables.
ETICAPARA ROBOTS
Las mquinas autnomas no tardarn en desempearun papel importante en nuestras vidas.
Antes o despus, debern tomar decisiones ticas
Michael Anderson y Susan Leigh Anderson
FO
TOGRAFIADEDARRENBRAUN
-
7/25/2019 tica Para Robots_IC411
2/6INVESTIGACION YCIENCIA,diciembre, 2010 57
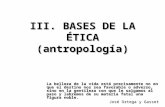
1. NAO, fabricado por Aldebaran Robotics, es el primer robot
programado con un principio tico.
-
7/25/2019 tica Para Robots_IC411
3/658 INVESTIGACION YCIENCIA,diciembre, 2010
desde la iluminacin hasta la climatizacin dela vivienda, pueden entenderse como robotscuyo cuerpo es la casa entera.
Varias compaas se hallan desarrollandorobots concebidos para ayudar a ancianos ensus quehaceres diarios. Aunque tales robotsno han de tomar decisiones de vida o muerte,
para que sus acciones sean bien recibidas, lasmismas deben percibirse como imparciales,correctas o, sencillamente, amables. Por ello,los diseadores de robots deberan considerarlas ramificaciones ticas de sus programas.
Si aceptamos que la clave del xito en suinteraccin con los humanos reside en quelas mquinas autnomas incorporen princi-pios ticos, la primera pregunta es: culeshabran de ser esos principios? Es probableque los amantes de la ciencia ficcin piensenque Isaac Asimov ya hall la respuesta hacebastantes aos. En su relato Crculo vicioso
(publicado en 1942 e incluido en 1950 ensu obra Yo, robot), Asimov enunciaba sus tresleyes de la robtica:
1. Un robot no debe daar a un ser hu-
mano o, por su inaccin, dejar que un
ser humano sufra dao.
2. Un robot debe obedecer las rdenes
que le son dadas por un ser humano,
excepto si dichas rdenes entran en
conflicto con la Primera Ley.
3. Un robot debe proteger su propia
existencia, siempre y cuando dicha
proteccin no entre en conflicto con
la Primera o la Segunda Ley.
Sin embargo, al reflexionar sobre las con-secuencias de estas tres leyes se observan in-coherencias. Ya el propio Asimov las puso demanifiesto en El hombre del bicentenario, de1976: unos matones ordenan a un robot quese desmonte a s mismo. En virtud de la Se-gunda Ley, el robot ha de obedecerles, y nopuede actuar en defensa propia sin causarlesdao, pues infringira la Primera.
Si las leyes de Asimov no bastan, hay alter-nativas? Hay quienes opinan que implementar
comportamientos ticos en una mquina su-pone un objetivo inalcanzable. La tica, afir-man, no es computable y, por tanto, resultaimposible de programar.
Sin embargo, ya en el siglo los filsofosJeremy Bentham y John Stuart Mill sostenanque la adopcin de decisiones ticas no es sinofruto de cierta aritmtica moral. Su doctri-na del utilitarismo hedonista, formulada enoposicin a una tica basada en la intuicinsubjetiva, sostiene que la accin correcta esaquella con ms posibilidades de resultar enel mximo placer neto. Este se calculara
sumando las unidades de placer y restando
las unidades de sufrimiento experimentadaspor todos los afectados en una decisin. Lamayora de los filsofos pone en tela de juicioque semejante teora logre dar cuenta de todaslas dimensiones de la tica. Por ejemplo, resultadifcil dar cabida en ella a consideraciones de
justicia, y puede llevar a que un individuo sea
sacrificado en beneficio de una mayora. Pero,al menos, pone de manifiesto que una teoratica plausible es, en principio, computable.
Otros cuestionan la posibilidad de que unamquina llegue a tomar decisiones ticas yaque, al carecer de emociones, le es imposiblehacerse cargo de los sentimientos de los indivi-duos. Pero los humanos somos tan propensosa dejarnos arrastrar por nuestras emocionesque, a menudo, nos comportamos de formapoco o nada tica. Esta particularidad, sumadaa la tendencia de actuar en favor propio ode nuestros seres queridos, hace que nuestras
decisiones suelan distar mucho de ser idealesen su dimensin tica. En nuestro parecer, yaun cuando una mquina carezca de emo-ciones, debera ser posible disear un robotque, adiestrado de la manera adecuada, actuarade modo imparcial, percibiera las emocioneshumanas y las incluyera en sus clculos.
Enseanza prcticaSi se admite la posibilidad de dotar a los robotsde pautas ticas, cules habran de ser stas?La pregunta es compleja. A fin de cuentas,tampoco para los humanos ha conseguido nadie
formular un sistema general de principios ticosque goce de aceptacin universal. Sin embargo,una mquina se caracteriza por haber sido crea-da para operar en dominios especficos. La tareade determinar los parmetros ticos relevantesen una situacin concreta resulta mucho menosabrumadora y ambiciosa que el objetivo defijar normas ticas de carcter universal, que esla manera en la que los filsofos suelen afrontarla cuestin. Adems, en el tipo de circunstanciasen las que un robot habra de actuar, la mayorade ticos y filsofos se hallaran de acuerdo a lahora de determinar qu acciones son ticamente
permisibles y cules no. Cuando no existiesetal acuerdo, somos de la opinin de que nodebera permitirse en absoluto que las mquinastomasen decisiones autnomas.
Los mtodos que se han propuesto paraque una mquina derive normas de compor-tamiento son varios. En general, los mismosse fundamentan en tcnicas de inteligenciaartificial (IA). En 2005, Rafal Rzepka y Kenji
Araki, de la Universidad Hokkaido, en Japn,propusieron algoritmos de decisin democr-tica que efectan bsquedas masivas en la Redpara indagar acerca de lo que, desde un punto
de vista tico, se ha considerado aceptable en
Michael Andersonse doctor
en la Universidad de Connecticut
y es profesor de informtica en la
Universidad de Hartford. Susan
Leigh Andersones doctora por
la Universidad de California en
Los Angeles y profesora emritade filosofa en la Universidad de
Connecticut. Especializada en
tica aplicada, en 2005 ella y
Michael Anderson contribuyeron
a organizar el primer simposio
internacional sobre tica artificial.
Los autores
-
7/25/2019 tica Para Robots_IC411
4/6INVESTIGACION YCIENCIA,diciembre, 2010 59
el pasado. Despus, aplican anlisis estadsticosy, a partir de ellos, formulan soluciones a pro-blemas nuevos. En 2006, Marcello Guarini, dela Universidad Windsor, en Ontario, propusoel entrenamiento de redes neuronales (sistemasinspirados en el funcionamiento del cerebro yque aprenden a procesar informacin cada vezcon mayor eficiencia) mediante el empleo decasos ya existentes para, en situaciones afines,reconocer y seleccionar decisiones aceptablesticamente.
En nuestra opinin, la adopcin de de-cisiones ticas comporta un equilibrio entre
varios deberes, los que en tica se denominan
obligacionesprima facie(a primera vista). Setrata de aquellas que, en principio, siempredeberamos esforzarnos en cumplir, si bien enciertas ocasiones requieren ser postergadas enfavor de otras. Por ejemplo, todos coincidiremosen que hemos de mantenernos fieles a nuestraspromesas, pero ninguno dudaramos en faltar auna promesa insignificante si sabemos que, alhacerlo, evitamos un gran dao. Cuando dosdeberes entran en conflicto, los principios ticossirven para determinar prioridades.
A fin de obtener normas ticas programa-bles hemos recurrido al aprendizaje autom-
tico, una tcnica de IA. Nuestro algoritmoILUSTRACIONDEPETERYMARIAHOEY
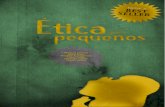
Cdigo de conductaEn su interaccin con las personas, los robots debern adoptar
decisiones con implicaciones ticas. Ante la imposibilidad de prever
todos los dilemas que una mquina encontrar, la solucin pasa por
dotarla de principios generales que la faculten para tomar decisiones
en cada caso. Los autores han implementado esta idea en el robot
Nao: su programacin le permite decidir cundo y cmo debe recor-
dar a un paciente la toma de un medicamento.
Qu hacer?Ante un dilema, un asistente robtico
para personas mayores podra consi-derar las acciones posibles, ver enqu medida se atienen a criterios ti-cos y, en funcin de dicha valoracin,determinar la accin prioritaria encada caso. Por ejemplo, aunque unresidente le solicite un tentempiy otro el mando a distancia, el robotdecidir que lo primero que ha de ha-cer es recordarle a un paciente quedebe tomar su medicacin.
Imposicin de normasSe puede programar un principiotico en un robot mediante el empleodel aprendizaje automtico, unatcnica de inteligencia artificial.A un algoritmo se le proporcionainformacin sobre las opciones quese consideran ticas en casosejemplares a partir de ndices como
cunto beneficio se obtendr, cuntodao se evitar o una medida de suimparcialidad. Despus, el algoritmoabstrae un principio general aplicablea casos nuevos.
E L P R I M E R R O B O T E T I C O
Principiotico
Algoritmo
deaprendizaje
automtico
En esta situacin,el principio tico induceal robot a llevar elmedicamento y posponerotras tareas.
Hacerelbien
Evitardaos
Serimparcial
Alto
Bajo
Eleccin
tica
Caso1
vs.
Eleccint
ica
Caso3
vs.
Eleccint
ica
Caso2
vs.
Robot en accin
Criteriosticos
-
7/25/2019 tica Para Robots_IC411
5/660 INVESTIGACION YCIENCIA,diciembre, 2010
accede a una muestra de decisiones particularesconsideradas ticamente correctas. Despus,mediante lgica inductiva, el algoritmo pro-cede a la abstraccin de un principio tico.Esta fase de instruccin tiene lugar durante
el diseo del software. Despus, el principiotico resultante se implementa en la progra-macin del robot.
La primera comprobacin experimental denuestro mtodo se llev a cabo en el siguienteescenario hipottico: un robot ha de recordar-le a un paciente la toma de un medicamentoy, en el caso de que el paciente no se avengaa hacerlo, notificar a un supervisor. El robotha de buscar un equilibrio entre tres obliga-ciones: asegurarse de que el sujeto obtendrun posible beneficio si toma la medicacin,prever los efectos perniciosos en caso de no
hacerlo y, por ltimo, respetar la autonomadel paciente, a quien se considera adulto ycompetente. El respeto a la voluntad delenfermo recibe una elevada consideracinen la tica mdica; esa deferencia se veravulnerada si el robot insistiese con excesivafrecuencia o si notificase demasiado prontoal supervisor.
Tras suministrarle la informacin en unaserie de casos particulares, el algoritmo deaprendizaje automtico elabor el siguienteprincipio tico: debe obviarse la decisin delpaciente siempre que, en caso de actuar de
otra forma, no se impida un posible dao o
se incurra en una violacin grave del deber depromover el bienestar del paciente.
Una idea con patasDespus procedimos a programar ese princi-
pio en el robot humanoide Nao, de la firmafrancesa Aldebaran Robotics. Nao es un ro-bot capacitado para localizar y dirigirse a unpaciente al que debe recordarle la toma deun medicamento, llevrselo, interactuar conl empleando un lenguaje natural y, en casode necesidad, notificar a un supervisor porcorreo electrnico. Para realizar su tarea, elrobot recibe una serie de datos iniciales, comola hora de la toma, el dao mximo que po-dra sufrir el enfermo en caso de no tomar lamedicacin, el tiempo que ese dao tardaraen manifestarse, el mximo beneficio que se
espera del medicamento y la duracin estimadade ese beneficio.
A partir de esa informacin, el robot calculaen qu grado debe cumplir o faltar a cada unode sus tres deberes y, en funcin del resultado,ejecuta una u otra accin. Emite un recordato-rio al paciente cuando resulta preferible insistirque abstenerse de hacerlo. Adems, el robotslo enva una notificacin al supervisor si, encaso de no hacerlo, el paciente pudiese sufrirdaos o bien verse privado de un beneficioconsiderable.
Una hipottica versin completa de un
robot tico de asistencia a personas mayores, CORTESIADENICCOLAI-TEKNOART/MUSEODELEONARDODAVINCI,FL
ORENCIA(robothumanoide);
CO
LECCIONGRANGER(Bentham);GETTYIMAGES(carteldeR.U.R.)
;UFA
/COLECCIONKOBAL(robotdeMetrpolis)
B R E V E H I S T O R I A D E L A E T I C A A R T I F I C I A L
Cuando la ciencia imita al arteMucho antes de que filsofos o expertos en inteligencia artificial se interesasen por las posibles
implicaciones ticas del comportamiento de los robots, numerosos escritores y cineastas ya haban
abordado la cuestin. Slo en los ltimos aos la tica artificial ha adquirido un estatus acadmico
y cientfico, en parte inspirada por doctrinas filosficas del siglo XVIII.
1495Leonardo da Vinciproyecta uno de los primerosrobots humanoides
1780-90Jeremy Bentham
(arriba) y John Stuart Millproponen la idea de unatica computable
1921La obra teatral R.U.R.,de Karel Capek, introduce la
voz robot y la idea de unarebelin robtica
1750 1800 1850
-
7/25/2019 tica Para Robots_IC411
6/6INVESTIGACION YCIENCIA,diciembre, 2010 61
al que llamaremos EthEl, exigira una norma-tiva tica ms compleja, pero su principio defuncionamiento sera el mismo. Durante susturnos en la residencia, el robot aplicara eseprincipio para determinar qu obligaciones
adquieren prioridad sobre las dems.A primera hora de la maana, EthEl per-
manece en un rincn conectado a la toma deelectricidad. Cuando sus bateras se encuen-tran cargadas, sus obligaciones benficas (hazel bien) se anteponen al deber de cuidar des mismo y comienza su ronda. Visita a losresidentes y les pregunta si puede servirles enalgo, como traerles una bebida o enviar unmensaje a otro residente. A medida que leson encargadas tareas, asigna niveles inicia-les al cumplimiento y al abandono de cadauna de las obligaciones que conlleva cada
tarea. Uno de los residentes se encuentra maly le pide que vaya a buscar a una enfermera.Obviar el malestar de un paciente implicainfringir el deber de no maleficencia (evitacausar dao). Este ltimo se impone ahoraal de beneficencia, por lo que EthEl va enbusca de la enfermera. Despus, el deber debeneficencia vuelve a ser prioritario y prosiguesu ronda.
A las 10 de la maana ha de recordarle a unresidente la toma de su medicacin. Al corres-ponderse con el deber de beneficencia, dichatarea adquiere la mxima importancia. EthEl
localiza al paciente y le lleva su medicacin.
Ms tarde, cuando los residentes se encuentranabsortos en un programa de televisin y sinotras obligaciones pendientes, EthEl asume eldeber de cuidar de s mismo y regresa a unpunto de recarga.
Los estudios en tica artificial no se hallansino en sus albores. Nuestros resultados, sibien preliminares, nos animan a pensar quees posible que una mquina elabore principiosticos tiles para guiar el comportamiento delos robots. Ello facilitara que los humanosaceptsemos sus conductas, ya que el temor aunas mquinas carentes de tica seguramenteprovocara un rechazo total hacia cualquierrobot autnomo. Podemos decir que lo queest en juego es el futuro de la misma inteli-gencia artificial.
Por ltimo, creemos que la tica artificial
puede realizar aportaciones al estudio de la ti-ca: a la hora de aislar la esencia de la conductatica de las personas, puede que los plantea-mientos concretos y cotidianos que afrontala IA resulten ms efectivos que las abstractasteoras ticas de algunos acadmicos. E inclusopuede que una mquina debidamente entrena-da lograse comportarse de un modo ms ticoque muchas personas, ya que seran capaces deobrar con imparcialidad, algo que los humanosno siempre conseguimos. Quizs algn da lainteraccin con uno de tales robots nos sirvade inspiracin para un comportamiento ms
tico por nuestra parte.CORTESIADERANDOMH
OUSE(portadadeYo,
robot);MGM/COLECCION
KOBAL(HAL9000);
AF
P/GETTYIMAGES(KasprovyDeepBlue)
1968En el clsico2001:
una odisea del espacio,de Stanley Kubrick,la computadora HAL 9000se rebela contra los humanos
1979En un accidente en unacadena de montaje, RobertWilliams se convierte en la
primera persona que fallecepor la accin de un robot
1991James Gips analizadistintos enfoques hacia la
tica artificial en su artculoTowards an ethical robot
(Hacia un robot tico)
1987M. Mitchell Waldropintroduce el trmino ticaartificial (machine ethics)
1993Rodger Clarkecritica las leyes de Asimov
1997Gari Kasprov, campenmundial de ajedrez, pierdefrente a la supercomputadoraDeep Blue, de IBM
2004Michael Andersony Susan Leigh Andersonproponen la programacinde principios ticos en robotsen su artculo Towards
machine ethics (Haciauna tica artificial)
2010Nao es el primerrobot cuya conductaresponde a un principiotico
1950Alan Turingpropone su test
para definirla inteligencia
en una mquina
1900 1950 2000
1942Isaac Asimov enuncia
las tres leyes de la robticaen su relato Crculo Vicioso
1927El Maschinenmensch,del filme clsico de FritzLang Metrpolis(izquierda),es instruido para atacar alos humanos
1952W. S. McCullochpublica las primeras
consideracionescientficas sobremquinas ticas
IEEE INTELLIGENT SYSTEMS.Nmero especial dedicado ala tica artificial. Julio-agostode 2006.
UN ROBOT EN CADA CASA.BillGates en Investigacin y Cien-cia, n.o366; marzo de 2007.
MACHINE ETHICS. CREATING AN
ETHICAL INTELLIGENT AGENT.Mi-chael Anderson y Susan LeighAnderson enAI Magazine,vol. 28, n.o4, pgs. 15-26; 2007.
MORAL MACHINES. TEACHING
ROBOTS RIGHT FROM WRONG.Colin Allen y Wendell Wallach.Oxford University Press, 2008.
WAR OF THE MACHINES.P. W.Singer enScientific American,vol. 303, n.o 1, pgs. 56-63;
julio de 2010.
PARA SABER MAS